CN110384441B - 一种扫地机器人 - Google Patents
一种扫地机器人 Download PDFInfo
- Publication number
- CN110384441B CN110384441B CN201910502414.7A CN201910502414A CN110384441B CN 110384441 B CN110384441 B CN 110384441B CN 201910502414 A CN201910502414 A CN 201910502414A CN 110384441 B CN110384441 B CN 110384441B
- Authority
- CN
- China
- Prior art keywords
- robot body
- robot
- mounting cavity
- hole
- sliding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/28—Floor-scrubbing machines, motor-driven
- A47L11/282—Floor-scrubbing machines, motor-driven having rotary tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4063—Driving means; Transmission means therefor
- A47L11/4066—Propulsion of the whole machine
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4063—Driving means; Transmission means therefor
- A47L11/4069—Driving or transmission means for the cleaning tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4088—Supply pumps; Spraying devices; Supply conduits
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
Abstract
本发明涉及机器人设备技术领域,公开了一种扫地机器人。其包括机器人本体,机器人本体包括驱动机构和清扫机构,清扫机构包括第一安装腔,第一安装腔内设有立柱,第二安装腔的下侧壁上设有凹槽;立柱之间设有支撑板,支撑板上设有通孔,通孔的侧壁上设有转动槽,支撑板上设有伺服电机,伺服电机上设有第一锥齿轮,支撑板与一第一气缸相连;通孔处设有转动筒,转动筒的外侧壁上设有转动环,转动筒的上端面设有与第一锥齿轮相啮合的第二锥齿轮,转动筒的侧面上且位于底端处设有多个铰接槽,铰接槽内铰接有连接杆,连接杆的端部上连接有毛刷。通过驱动机构和清扫机构的设置,使得毛刷能够收于机器人本体内,避免清扫地面湿润导致毛刷上吸附杂物。
Description
技术领域
本发明涉及机器人设备技术领域,具体地说,涉及一种扫地机器人。
背景技术
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。
现有的扫地机器人大多数都是利用可见光定位,通过扫吸的方式将地面上的杂物吸进自身的垃圾收纳盒内。现有的扫地机器人上大多只单设有毛刷或滚筒,仅能够对地面进行刷扫或擦拭,当清扫的地面湿润时,毛刷刷扫时很难将地面扫吸干净,同时,毛刷刷扫湿润地面时毛刷上易吸附杂物;当清扫地面干燥时,毛刷刷扫时很容易造成扬尘,造成室内空气质量下降。
发明内容
针对现有技术中存在的毛刷刷扫湿润地面时毛刷上易吸附杂物以及毛刷刷扫干燥的地面易造成扬尘的缺陷,本发明提供了一种扫地机器人。
为了解决上述技术问题,本发明通过下述技术方案得以解决。
一种扫地机器人,其包括机器人本体,机器人本体包括驱动机构和清扫机构,驱动机构包括位于机器人本体下端部的且由电机驱动的驱动轮和转向轮;清扫机构包括对称设置且开口朝向机器人本体下端的第一安装腔,第一安装腔的顶壁处通过第二安装腔相连通,第一安装腔内沿第一安装腔的延伸方向均设有立柱,第二安装腔的下侧壁上设有凹槽;立柱之间设有位于第二安装腔内的支撑板,支撑板上设有通孔,立柱穿过通孔设置,通孔的侧壁上设有与通孔同轴设置的转动槽,支撑板的上板面设有伺服电机,伺服电机的转动轴上设有第一锥齿轮,支撑板的下板面与一位于凹槽内的第一气缸相连;通孔处转动设有呈圆柱状的转动筒,立柱穿过转动筒设置,转动筒的外侧壁上设有能够位于转动槽内的转动环,转动筒的上端面设有呈圆环状的且与第一锥齿轮相啮合的第二锥齿轮,转动筒的侧面上且位于底端处设有多个铰接槽,所述多个铰接槽在转动筒的周向上均匀分布,铰接槽内铰接有连接杆,连接杆的端部上连接有用于对灰尘进行刷扫的毛刷;清扫机构还包括位于机器人本体下端处用于对毛刷扫起的灰尘进行吸收的吸尘口。
通过本发明的驱动机构的设置,使得驱动机构能够带动机器人本体的移动,实现自动对地面进行清扫,其中,驱动轮和转向轮的设置,使得驱动轮能够使机器人本体移动,转向轮能够使机器人本体转向;通过清扫机构的设置,使得机器人本体能够对地面的灰尘进行清扫;其中,伺服电机、第一锥齿轮,转动筒和第二锥齿轮的设置,使得伺服电机转动带动第一锥齿轮转动,进而带动转动筒转动;其中,铰接槽和连接杆的设置,使得连接杆能够铰接在铰接槽内,进而使连接杆能够安装在转动筒上,从而使转动筒转动带动连接杆转动,实现毛刷在地面上的扫刷;其中,立柱、支撑板、通孔、转动槽、转动环和第一气缸的设置,通过转动环和转动槽相配合使得转动筒能够安装在支撑板上的同时转动筒能够转动,第一气缸带动支撑板向上移动时,转动筒上移带动连接杆上升,进而使得毛刷能够收于机器人本体内,从而使得地面湿润时扫地机器人的毛刷不会吸附杂物;第一气缸带动支撑板向下移动时,手动的摆放好连接杆的位置使得伺服电机转动能够带动毛刷刷扫地面。本发明通过以上的技术方案,使得扫地机器人的毛刷能够对地面的灰尘进行清扫,同时毛刷能够收于机器人本体内,避免清扫地面湿润导致毛刷上吸附杂物。
作为优选,立柱的底端设有呈圆环状的喷雾块,立柱内设有水雾通道,喷雾块内设有与水雾通道相连通的空腔,空腔的侧壁上设有出雾孔,喷雾块的上侧面设有截面呈T型且与立柱同轴设置的第一滑槽,第一滑槽处滑动设有呈圆环状的滑环,滑环的底端设有与第一滑槽相配合的滑轨,滑环上设有与铰接槽相对应的弹簧安装孔,弹簧安装孔内安装有与对应连接杆相连的第一弹簧;机器人本体内设有用于将水雾化且与水雾通道相连通的雾化装置。
本发明中,通过雾化装置、水雾通道、喷雾块和出雾孔的设置,使得雾化装置能够将水雾化,并通过水雾通道将水雾注入喷雾块内,进而由出雾孔排出,对干燥的清扫地面进行湿润,减少毛刷刷扫时扬尘的产生;通过第一滑槽、滑环和滑轨的设置,使得滑轨位于第一滑槽内使滑环能够沿着第一滑槽转动的同时,滑环不会脱离喷雾块;其中,弹簧安装孔和第一弹簧的设置,使得第一弹簧提供弹力使连接杆向第一安装腔的开口处周向移动,从而使第一气缸下降时连接杆自动向第一安装腔开口处的四周撑开,无需手动摆放,同时,便于伺服电机转动带动毛刷转动清扫。
作为优选,机器人本体还包括刷吸机构,刷吸机构包括开口朝向机器人本体下端的第三安装腔,第三安装腔的顶壁上固定设有第二气缸,第二气缸的推杆上连接有铰接件,铰接件上铰接有滚筒,滚筒的外侧套设有海绵层。
本发明中,通过刷吸机构的设置,使得机器人本体能够对湿润的地面进行擦拭;其中第二气缸、铰接件和滚筒的设置,使得第二气缸带动铰接件升降,进而带动滚筒伸出和缩回机器人本体内,从而方便滚筒的使用;其中,海绵层的设置,使得海绵层对地面上的水进行吸收,完成对地面的擦拭。
作为优选,第三安装腔的左右侧壁上对称设有开口朝向第三安装腔的第四安装腔,第四安装腔内通过第二弹簧设有伸出第四安装腔的推块,推块的端部处连接有用于对海绵层进行挤压的挤压板,推块的上侧面设有第一斜面;第三安装腔的侧壁上且位于第四安装腔的上方均沿滚筒移动的方向滑动设有滑动块,滑动块的下端面上设有用于与第一斜面相挤压将推块推出第四安装腔的第二斜面,滑动块上端部均铰接在一连杆的一端上;连杆的另一端均铰接在第二气缸的推杆上,连杆的中部均铰接在第三安装腔的侧壁上。
本发明中,通过推块和挤压板的设置,使得推块带动挤压板对滚筒上的海绵层进行挤压,进而使海绵层吸收的水排出海绵层,从而方便海绵层重复对湿润的地面进行擦拭;通过连杆和滑动块的设置,使得第二气缸的推杆向上移动时带动连杆移动进而带动滑动块向下移动,使得滑动块上的第二斜面挤压推块上的第一斜面,从而使推块推动挤压板对跟随第二气缸上升的滚筒上的海绵层进行挤压脱水;其中第二弹簧的设置,使得第二气缸的推杆向下移动时,第二弹簧提供弹力拉动推块缩回第四安装腔内,挤压板松开对滚筒的挤压,滚筒伸出机器人本体对地面进行擦拭。
作为优选,第三安装腔的前后侧壁上沿着滚筒的移动方向设有呈T型的第二滑槽,铰接件上设有与第二滑槽相配合的滑块。
本发明中,通过第二滑槽和滑块的设置,使得滑块在第二滑槽内滑动使铰接件的移动方向得到限制,从而防止铰接件在第三安装腔内晃动。
作为优选,机器人本体的顶端上铰接有盖板。
本发明中,通过盖板的设置,使得盖板能够开合进而方便通过吸尘口吸入机器人本体内的灰尘得到排出,从而便于扫地机器人的使用。
作为优选,机器人本体的侧壁上设有散热孔。
本发明中,通过散热孔的设置,使得机器人本体内产生的热量能够得到散发,从而使扫地机器人的使用寿命延长。
附图说明
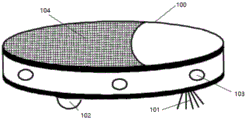
图1为实施例1中的一种扫地机器人的示意图;
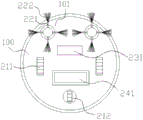
图2为实施例1中的扫地机器人的底部示意图;
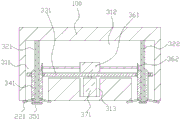
图3为实施例1中的清扫机构的示意图;
图4为实施例1中的支撑板的示意图;
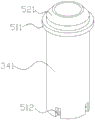
图5为实施例1中的转动筒的示意图;
图6为实施例1中的喷雾块的示意图;
图7为实施例1中的刷吸机构的示意图;
图8为实施例1中铰接件与滚筒的结构示意图。
附图中各数字标号所指代的部位名称如下:100、机器人本体;101、清扫机构;102、驱动机构;103、散热孔;104、盖板;211、驱动轮;212、转向轮;221、连接杆;222、毛刷;231、吸尘口;241、刷吸机构;311、第一安装腔;312、第二安装腔;313、凹槽;321、立柱;322、水雾通道;331、支撑板;341、转动筒;351、喷雾块;361、伺服电机;362、第一锥齿轮;371、第一气缸;411、通孔;412、转动槽;511、转动环;512、铰接槽;521、第二锥齿轮;611、空腔;612、出雾孔;613、第一滑槽;621、滑环;622、滑轨;623、弹簧安装孔;711、第三安装腔;712、第四安装腔;721、第二气缸;731、第二弹簧;741、推块;742、第一斜面;751、滑动块;752、第二斜面;761、连杆;771、铰接件;772、滚筒;773、海绵层;811、滑块。
具体实施方式
为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。应当理解的是,实施例仅仅是对本发明进行解释而并非限定。
实施例1
如图1-8所示,本实施例提供了一种扫地机器人,其包括机器人本体100,机器人本体100包括驱动机构102和清扫机构101,驱动机构102包括位于机器人本体100下端部的且由电机驱动的驱动轮211和转向轮212;清扫机构101包括对称设置且开口朝向机器人本体100下端的第一安装腔311,第一安装腔311的顶壁处通过第二安装腔312相连通,第一安装腔311内沿第一安装腔311的延伸方向均设有立柱321,第二安装腔312的下侧壁上设有凹槽313;立柱321之间设有位于第二安装腔312内的支撑板331,支撑板331上设有通孔411,立柱321穿过通孔411设置,通孔411的侧壁上设有与通孔411同轴设置的转动槽412,支撑板331的上板面设有伺服电机361,伺服电机361的转动轴上设有第一锥齿轮362,支撑板331的下板面与一位于凹槽313内的第一气缸371相连;通孔411处转动设有呈圆柱状的转动筒341,立柱321穿过转动筒341设置,转动筒341的外侧壁上设有能够位于转动槽412内的转动环511,转动筒341的上端面设有呈圆环状的且与第一锥齿轮362相啮合的第二锥齿轮521,转动筒341的侧面上且位于底端处设有多个铰接槽512,所述多个铰接槽512在转动筒341的周向上均匀分布,铰接槽512内铰接有连接杆221,连接杆221的端部上连接有用于对灰尘进行刷扫的毛刷222;清扫机构101还包括位于机器人本体100下端处用于对毛刷222扫起的灰尘进行吸收的吸尘口231。
通过本实施例中的驱动机构102的设置,使得驱动机构102能够带动机器人本体100的移动,实现自动对地面进行清扫,其中,驱动轮211和转向轮212的设置,使得驱动轮211能够使机器人本体100移动,转向轮212能够使机器人本体100转向;通过清扫机构101的设置,使得机器人本体100能够对地面的灰尘进行清扫;其中,伺服电机361、第一锥齿轮362,转动筒341和第二锥齿轮521的设置,使得伺服电机361转动带动第一锥齿轮362转动,进而带动转动筒341转动;其中,铰接槽512和连接杆221的设置,使得连接杆221能够铰接在铰接槽512内,进而使连接杆221能够安装在转动筒341上,从而使转动筒341转动带动连接杆221转动,实现毛刷222在地面上的扫刷;其中,立柱321、支撑板331、通孔411、转动槽412、转动环511和第一气缸371的设置,通过转动环511和转动槽412相配合使得转动筒341能够安装在支撑板331上的同时转动筒341能够转动,第一气缸371带动支撑板331向上移动时,转动筒341上移带动连接杆221上升,进而使得毛刷222能够收于机器人本体100内,从而使得地面湿润时扫地机器人的毛刷222不会吸附杂物;第一气缸371带动支撑板331向下移动时,手动的摆放好连接杆221的位置使得伺服电机361转动能够带动毛刷222刷扫地面。本发明通过以上的技术方案,使得扫地机器人的毛刷222能够对地面的灰尘进行清扫,同时毛刷222能够收于机器人本体100内,避免清扫地面湿润导致毛刷222上吸附杂物。
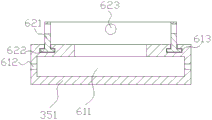
本实施例中,立柱321的底端设有呈圆环状的喷雾块351,立柱321内设有水雾通道322,喷雾块351内设有与水雾通道322相连通的空腔611,空腔611的侧壁上设有出雾孔612,喷雾块351的上侧面设有截面呈T型且与立柱321同轴设置的第一滑槽613,第一滑槽613处滑动设有呈圆环状的滑环621,滑环621的底端设有与第一滑槽613相配合的滑轨622,滑环621上设有与铰接槽512相对应的弹簧安装孔623,弹簧安装孔623内安装有与对应连接杆221相连的第一弹簧;机器人本体100内设有用于将水雾化且与水雾通道322相连通的雾化装置。
通过本实施例中的雾化装置、水雾通道322、喷雾块351和出雾孔612的设置,使得雾化装置能够将水雾化,并通过水雾通道322将水雾注入喷雾块351内,进而由出雾孔612排出,对干燥的清扫地面进行湿润,减少毛刷222刷扫时扬尘的产生;通过第一滑槽613、滑环621和滑轨622的设置,使得滑轨622位于第一滑槽613内使滑环621能够沿着第一滑槽613转动的同时,滑环621不会脱离喷雾块351;其中,弹簧安装孔623和第一弹簧的设置,使得第一弹簧提供弹力使连接杆221向第一安装腔311的开口处周向移动,从而使第一气缸371下降时连接杆221自动向第一安装腔311开口处的四周撑开,无需手动摆放,同时,便于伺服电机361转动带动毛刷222转动清扫。
本实施例中,机器人本体100还包括刷吸机构241,刷吸机构241包括开口朝向机器人本体100下端的第三安装腔711,第三安装腔711的顶壁上固定设有第二气缸721,第二气缸721的推杆上连接有铰接件771,铰接件771上铰接有滚筒772,滚筒772的外侧套设有海绵层773。
通过本实施例中的刷吸机构241的设置,使得机器人本体100能够对湿润的地面进行擦拭;其中第二气缸721、铰接件771和滚筒772的设置,使得第二气缸721带动铰接件771升降,进而带动滚筒772伸出和缩回机器人本体100内,从而方便滚筒772的使用;其中,海绵层773的设置,使得海绵层773对地面上的水进行吸收,完成对地面的擦拭。
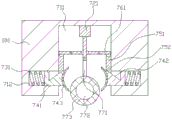
本实施例中,第三安装腔711的左右侧壁上对称设有开口朝向第三安装腔711的第四安装腔712,第四安装腔712内通过第二弹簧731设有伸出第四安装腔712的推块741,推块741的端部处连接有用于对海绵层773进行挤压的挤压板743,推块741的上侧面设有第一斜面742;第三安装腔711的侧壁上且位于第四安装腔712的上方均沿滚筒772移动的方向滑动设有滑动块751,滑动块751的下端面上设有用于与第一斜面742相挤压将推块741推出第四安装腔712的第二斜面752,滑动块751上端部均铰接在一连杆761的一端上;连杆761的另一端均铰接在第二气缸721的推杆上,连杆761的中部均铰接在第三安装腔711的侧壁上。
通过本实施例中的推块741和挤压板743的设置,使得推块741带动挤压板743对滚筒772上的海绵层773进行挤压,进而使海绵层773吸收的水排出海绵层773,从而方便海绵层773重复对湿润的地面进行擦拭;通过连杆761和滑动块751的设置,使得第二气缸721的推杆向上移动时带动连杆761移动进而带动滑动块751向下移动,使得滑动块751上的第二斜面752挤压推块741上的第一斜面742,从而使推块741推动挤压板743对跟随第二气缸721上升的滚筒772上的海绵层773进行挤压脱水;其中第二弹簧731的设置,使得第二气缸721的推杆向下移动时,第二弹簧731提供弹力拉动推块741缩回第四安装腔712内,挤压板743松开对滚筒772的挤压,滚筒772伸出机器人本体100对地面进行擦拭。
本实施例中,第三安装腔711的前后侧壁上沿着滚筒772的移动方向设有呈T型的第二滑槽,铰接件771上设有与第二滑槽相配合的滑块811。
通过本实施例中的第二滑槽和滑块811的设置,使得滑块811在第二滑槽内滑动使铰接件771的移动方向得到限制,从而防止铰接件771在第三安装腔711内晃动。
本实施例中,机器人本体100的顶端上铰接有盖板104。
通过本实施例中的盖板104的设置,使得盖板104能够开合进而方便通过吸尘口231吸入机器人本体100内的灰尘得到排出,从而便于扫地机器人的使用。
本实施例中,机器人本体100的侧壁上设有散热孔103。
通过本实施例中的散热孔103的设置,使得机器人本体100内产生的热量能够得到散发,从而使扫地机器人的使用寿命延长。
本实施例的一种扫地机器人在具体使用时,根据地面的湿润情况,当地面湿润时,第一气缸371启动使毛刷222收于机器人本体100内,第二气缸721启动使滚筒772伸出机器人本体100,机器人本体100在驱动机构102的作用下,完成对湿润地面的擦拭,当完成对湿润地面擦拭后,第二气缸721启动使滚筒772缩回机器人本体100内,此时滑动块751带动推块741使挤压板743对滚筒772上海绵层773进行挤压脱水,当地面干燥时,第一气缸371使位于机器人本体100内的毛刷222伸出,伺服电机361启动带动毛刷222刷动,同时机器人本体100内的雾化装置将产生的水雾由水雾通道322排至喷雾块351上,并有出雾孔612喷出,对地面进行湿润,减少扬尘的产生。
总之,以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所作的均等变化与修饰,皆应属本发明专利的涵盖范围。
Claims (7)
1.一种扫地机器人,其特征在于:包括机器人本体(100),机器人本体(100)包括驱动机构(102)和清扫机构(101),驱动机构(102)包括位于机器人本体(100)下端部的且由电机驱动的驱动轮(211)和转向轮(212);清扫机构(101)包括对称设置且开口朝向机器人本体(100)下端的第一安装腔(311),第一安装腔(311)的顶壁处通过第二安装腔(312)相连通,第一安装腔(311)内沿第一安装腔(311)的延伸方向均设有立柱(321),第二安装腔(312)的下侧壁上设有凹槽(313);立柱(321)之间设有位于第二安装腔(312)内的支撑板(331),支撑板(331)上设有通孔(411),立柱(321)穿过通孔(411)设置,通孔(411)的侧壁上设有与通孔(411)同轴设置的转动槽(412),支撑板(331)的上板面设有伺服电机(361),伺服电机(361)的转动轴上设有第一锥齿轮(362),支撑板(331)的下板面与一位于凹槽(313)内的第一气缸(371)相连;通孔(411)处转动设有呈圆柱状的转动筒(341),立柱(321)穿过转动筒(341)设置,转动筒(341)的外侧壁上设有能够位于转动槽(412)内的转动环(511),转动筒(341)的上端面设有呈圆环状的且与第一锥齿轮(362)相啮合的第二锥齿轮(521),转动筒(341)的侧面上且位于底端处设有多个铰接槽(512),所述多个铰接槽(512)在转动筒(341)的周向上均匀分布,铰接槽(512)内铰接有连接杆(221),连接杆(221)的端部上连接有用于对灰尘进行刷扫的毛刷(222);清扫机构(101)还包括位于机器人本体(100)下端处用于对毛刷(222)扫起的灰尘进行吸收的吸尘口(231);
立柱(321)的底端设有呈圆环状的喷雾块(351),立柱(321)内设有水雾通道(322),喷雾块(351)内设有与水雾通道(322)相连通的空腔(611),空腔(611)的侧壁上设有对地面进行湿润的出雾孔(612);机器人本体(100)内设有用于将水雾化且与水雾通道(322)相连通的雾化装置;
机器人本体(100)还包括使得机器人本体(100)对湿润的地面进行擦拭的刷吸机构(241),刷吸机构(241)包括滚筒(772),滚筒(772)的外侧套设有海绵层(773)。
2.根据权利要求1所述的一种扫地机器人,其特征在于:喷雾块(351)的上侧面设有截面呈T型且与立柱(321)同轴设置的第一滑槽(613),第一滑槽(613)处滑动设有呈圆环状的滑环(621),滑环(621)的底端设有与第一滑槽(613)相配合的滑轨(622),滑环(621)上设有与铰接槽(512)相对应的弹簧安装孔(623),弹簧安装孔(623)内安装有与对应连接杆(221)相连的第一弹簧。
3.根据权利要求1所述的一种扫地机器人,其特征在于:刷吸机构(241)包括开口朝向机器人本体(100)下端的第三安装腔(711),第三安装腔(711)的顶壁上固定设有第二气缸(721),第二气缸(721)的推杆上连接有铰接件(771),滚筒(772)铰接于铰接件(771)上。
4.根据权利要求3所述的一种扫地机器人,其特征在于:第三安装腔(711)的左右侧壁上对称设有开口朝向第三安装腔(711)的第四安装腔(712),第四安装腔(712)内通过第二弹簧(731)设有伸出第四安装腔(712)的推块(741),推块(741)的端部处连接有用于对海绵层(773)进行挤压的挤压板(743),推块(741)的上侧面设有第一斜面(742);第三安装腔(711)的侧壁上且位于第四安装腔(712)的上方均沿滚筒(772)移动的方向滑动设有滑动块(751),滑动块(751)的下端面上设有用于与第一斜面(742)相挤压将推块(741)推出第四安装腔(712)的第二斜面(752),滑动块(751)上端部均铰接在一连杆(761)的一端上;连杆(761)的另一端均铰接在第二气缸(721)的推杆上,连杆(761)的中部均铰接在第三安装腔(711)的侧壁上。
5.根据权利要求4所述的一种扫地机器人,其特征在于:第三安装腔(711)的前后侧壁上沿着滚筒(772)的移动方向设有呈T型的第二滑槽,铰接件(771)上设有与第二滑槽相配合的滑块(811)。
6.根据权利要求5所述的一种扫地机器人,其特征在于:机器人本体(100)的顶端上铰接有盖板(104)。
7.根据权利要求6所述的一种扫地机器人,其特征在于:机器人本体(100)的侧壁上设有散热孔(103)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910502414.7A CN110384441B (zh) | 2019-06-11 | 2019-06-11 | 一种扫地机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910502414.7A CN110384441B (zh) | 2019-06-11 | 2019-06-11 | 一种扫地机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110384441A CN110384441A (zh) | 2019-10-29 |
| CN110384441B true CN110384441B (zh) | 2023-06-06 |
Family
ID=68285537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910502414.7A Active CN110384441B (zh) | 2019-06-11 | 2019-06-11 | 一种扫地机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110384441B (zh) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011012462A (ja) * | 2009-07-02 | 2011-01-20 | Fukumoto Body:Kk | 自走式掃除機 |
| CN106852669A (zh) * | 2016-11-14 | 2017-06-16 | 钟玲珑 | 适用于不平整地面的智能扫地机器人 |
| CN108577685A (zh) * | 2018-05-18 | 2018-09-28 | 江苏昊科汽车空调有限公司 | 一种便于扫地机器人的灰尘清理装置 |
| CN108903817A (zh) * | 2018-06-28 | 2018-11-30 | 廖志敏 | 一种扫地机器人用地刷 |
| CN109157165A (zh) * | 2018-09-14 | 2019-01-08 | 合肥梦龙电子科技有限公司 | 一种家用智能拖地车 |
| CN109567683A (zh) * | 2019-01-31 | 2019-04-05 | 任飞 | 一种智能扫地机器人 |
| CN211022465U (zh) * | 2019-06-11 | 2020-07-17 | 皖西学院 | 一种扫地机器人 |
-
2019
- 2019-06-11 CN CN201910502414.7A patent/CN110384441B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011012462A (ja) * | 2009-07-02 | 2011-01-20 | Fukumoto Body:Kk | 自走式掃除機 |
| CN106852669A (zh) * | 2016-11-14 | 2017-06-16 | 钟玲珑 | 适用于不平整地面的智能扫地机器人 |
| CN108577685A (zh) * | 2018-05-18 | 2018-09-28 | 江苏昊科汽车空调有限公司 | 一种便于扫地机器人的灰尘清理装置 |
| CN108903817A (zh) * | 2018-06-28 | 2018-11-30 | 廖志敏 | 一种扫地机器人用地刷 |
| CN109157165A (zh) * | 2018-09-14 | 2019-01-08 | 合肥梦龙电子科技有限公司 | 一种家用智能拖地车 |
| CN109567683A (zh) * | 2019-01-31 | 2019-04-05 | 任飞 | 一种智能扫地机器人 |
| CN211022465U (zh) * | 2019-06-11 | 2020-07-17 | 皖西学院 | 一种扫地机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110384441A (zh) | 2019-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108670129B (zh) | 一种基于物联网的智能扫地机器人及其实现方法 | |
| CN208837816U (zh) | 大颗粒吸尘地刷及其清洗机 | |
| CN110899196B (zh) | 一种喷淋式中药饮片清洗装置 | |
| CN211022465U (zh) | 一种扫地机器人 | |
| CN110384441B (zh) | 一种扫地机器人 | |
| CN208301598U (zh) | 一种电动扫地机 | |
| WO2018210003A1 (zh) | 自动擦窗机器人 | |
| CN112393370A (zh) | 一种家用中央空调出风口用环保式自清洁装置 | |
| CN209831996U (zh) | 一种日用陶瓷生产用拉胚转盘 | |
| CN113116226A (zh) | 一种带梳齿管的清扫装置 | |
| CN211460056U (zh) | 一种带梳齿管的清扫装置 | |
| CN208551664U (zh) | 一种新型扫地机的擦地机构及扫地机 | |
| CN112982250A (zh) | 一种节能型环卫工人用道路清扫设备 | |
| CN220757310U (zh) | 一种用于扫地机的可更换扫盘 | |
| CN218960636U (zh) | 一种扫地机 | |
| CN214972424U (zh) | 一种中央空调维修用过滤网清洗设备 | |
| CN220512786U (zh) | 一种扫地机器人清洁结构 | |
| CN220192897U (zh) | 一种电梯轿厢用快速清洁器 | |
| CN211383830U (zh) | 一种带吹扫装置的石墨烯用喷雾干燥塔 | |
| CN219973050U (zh) | 一种地面残砂自动清扫机 | |
| CN213405900U (zh) | 一种带有拖地功能的扫地机器人 | |
| CN215836411U (zh) | 一种清洗效果好的畜牧养殖用清洗装置 | |
| CN214906422U (zh) | 自清洁扫地机器人 | |
| CN219092882U (zh) | 一种转盘吸烟机转盘盖板清洗机 | |
| CN216495098U (zh) | 一种智能扫地机器人的组件 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |