CN109613552B - 一种用于tls多回波点云植被遮挡目标的探测和分析方法 - Google Patents
一种用于tls多回波点云植被遮挡目标的探测和分析方法 Download PDFInfo
- Publication number
- CN109613552B CN109613552B CN201811494004.4A CN201811494004A CN109613552B CN 109613552 B CN109613552 B CN 109613552B CN 201811494004 A CN201811494004 A CN 201811494004A CN 109613552 B CN109613552 B CN 109613552B
- Authority
- CN
- China
- Prior art keywords
- vegetation
- point cloud
- echo
- target
- sheltered
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/487—Extracting wanted echo signals, e.g. pulse detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/493—Extracting wanted echo signals
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Theoretical Computer Science (AREA)
- Computational Linguistics (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- Image Processing (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
本发明公开了一种用于TLS多回波点云植被遮挡目标的探测方法,包括:S1、对TLS多回波点云进行点云预处理;S2、将预处理后的点云处理成数据集输入神经网络,进行神经网络的训练;S3、利用训练好的神经网络识别中间回波,根据识别的中间回波,找出植被遮挡冠层,以此确定植被遮挡区域;S4、利用末次回波滤除植被遮挡区域中的非植被遮挡目标,以此探测植被遮挡目标。在此基础上,本发明还提供了一种植被遮挡目标的分析方法,其从点云差分位置、回波密度以及回波强度角度进行可见性分析,具有很强的鲁棒性和可行性,将在森林调查、隐蔽目标分析、军事作战以及救援救灾等方面发挥巨大作用,具有重要的学术价值和现实意义。
Description
技术领域
本发明涉及多回波点云探测领域,具体涉及一种用于TLS多回波点云植被遮挡目标的探测和分析方法。
背景技术
随着大场景三维激光扫描技术不断完善,地面激光扫描仪(Terrestrial LaserScanners,简称TLS)成为继传统遥感技术之后重要的可穿透植被叶簇、且可感知与检测其遮挡目标的一种新型测距传感器。它通过向目标发射激光脉冲并接收其反射回来的回波信号,在三维空间上形成一系列点的集合,即多回波点云。每个点都具有三维坐标和强度,以此获取目标的几何位置和反射率。对于植被遮挡场景,用TLS获取点云数据,可以对被树丛遮挡的隐蔽目标进行感知与提取。
TLS点云数据以其高密度、高精度和高效率等优势,成为了一种精确获取空间数据的快速手段。首先,TLS采用单色光且发射波束极窄,隐蔽性好,对地物和背景具有极强的抑制能力;其次,激光对隐身目标具有极高的灵敏度,抗干扰能力突出;同时,激光扫描系统波长短,与微波扫描系统相比其体积和质量都比较小;另外,它有极高的分辨率,用其做精确制导导引头具有很高的精度。
TLS以一定的水平角度和垂直角度向目标发射激光脉冲,然后记录收到回波的时间,根据几何关系进行计算得出每个扫描点的位置、反射强度等信息。多个点构成一幅具有三维空间坐标的点的集合,即为点云数据。TLS全回波系统数字化记录单次发出脉冲的后向散射信号,因此,用户可以决定扫描场景的范围。当激光光束的光斑打击在可穿透物体(如树叶叶片边缘)时,另一部分光斑继续穿透叶簇,落在更深处的叶片上发生反射,如此继续重复,从而产生了多次回波。
单次回波表示激光束打到该点只产生一次反射,表示该处不可穿透。一次回波主要位于目标边缘,从而可以进行下一次反射。中间回波基本上只有植被树叶冠层,这是因为树叶与树叶之间有缝隙,激光束经过树叶边缘一部分产生一次反射,另一部分继续深入缝隙中获取树冠层深层次信息,从而产生中间回波。而末次回波也表示该处不再被穿透,主要为刚性物体,其中包含了可能被植被遮挡的隐蔽目标。
目前三维点云遮挡目标探测主要存在以下问题:
1、植被遮挡目标(即隐蔽目标)因其遮挡所展现出来的形态不完整、不规则,因此激光在其表面进行散射,波形背景复杂;
2、目标的局部结构可能存在判别力弱、不具有区分性等问题,因而单一的局部特征不能完整描述目标状态;
3、由于植被遮挡目标形态的多样性以及和扫描仪角度的随机性,且回波信号受大气效应、距离范围和噪声等变化的影响,点云遮挡检测对目标特性建模提出了较高的要求。
同时,现有技术中缺乏对基于TLS点云差分位置、TLS点云密度和TLS点云强度实现了植被遮挡目标(即隐蔽目标)的可见性分析,无法对探测模型及探测结果做出量化的评价。
发明内容
本发明的目的在于提供一种用于TLS多回波点云植被遮挡目标的探测方法。
为实现上述目的,本发明采用以下技术方案:
一种用于TLS多回波点云植被遮挡目标的探测方法,包括:
S1、对TLS多回波点云进行点云预处理;
S2、将预处理后的点云处理成数据集输入神经网络,进行神经网络的训练;
S3、利用训练好的神经网络识别中间回波,根据识别的中间回波,找出植被遮挡冠层,以此确定植被遮挡区域;
S4、利用末次回波滤除植被遮挡区域中的非植被遮挡目标,以此探测植被遮挡目标。
进一步地,步骤S1具体为,
S11、采用向上生长法进行地面滤除;
S12、采用基于体素的向上交错分析法进行植被提取。
进一步地,步骤S2具体为,将点云投影到xy平面,结合点云的强度信息,构成数据集;将数据集输入神经网络,进行神经网络的训练。
进一步地,步骤S4具体为,利用S2训练好的神经网络识别单次回波、一次回波以及末次回波,将单次回波、一次回波、中间回波以及末次回波分别标记为网络的第一层、第二层、第三层以及第四层,训练基于KD树思想的神经网络,学习植被遮挡区域末次回波的形成过程,以区分非植被遮挡区域的末次回波,从而探测末次回波中的植被遮挡目标。
本发明还提供一种用于TLS多回波点云植被遮挡目标的分析方法,用于对如前述的探测方法获得的探测结果进行可见性分析,其在所述步骤S4之后进行步骤S5:
S5、对植被遮挡目标,进行可见性分析,其包括:
S51、对植被遮挡目标进行差分位置分析;
S52、对植被遮挡目标进行回波密度分析;
S53、对植被遮挡目标进行回波强度分析。
进一步地,步骤S51中,点云差分位置分析具体为,
S511、计算植被遮挡区域和植被遮挡目标相邻点之间的三维坐标差值,获得差分位置矩阵;
S512、将得到的差分位置矩阵求特征值,得到复数矩阵,分别用Quiver,Feather,Compass,Angle函数,得到植被遮挡区域和植被遮挡目标的差分位置矩阵特征值可视化图形;
S513、对三维坐标差值做二次幂变换和log函数变换,得到植被遮挡区域和植被遮挡目标的二次幂矩阵特征值和特征向量的可视化图形。
进一步地,步骤S52具体为,
S521、获取植被遮挡区域与植被遮挡目标在x、y、z上的点云密度值,并进行归一化;
S522、计算多回波NDI指数,则有,

其中,n一次回波代表一次回波的距离范围均值,n末次回波代表末次回波的距离范围均值;
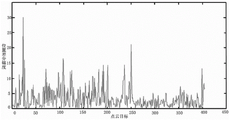
S523、以归一化的点云密度值为横坐标,以NDI指数为纵坐标,获得NDI指数随点云密度变化的示意图。
进一步地,步骤S53具体为,
S531、以点云强度值为横坐标,以点个数为纵坐标,同时,以不同颜色区分不同强度值,获得植被遮挡区域与植被遮挡目标的强度特性图;
S532、以XY平面植被遮挡区域的差分位置距离为横坐标,以植被遮挡目标的点云强度为纵坐标,获得二者的相关性二维特性图;
S533、分别以植被遮挡区域在X轴与Y轴方向上的差分位置距离dx和dy为X轴与Y轴,以植被遮挡目标的点云强度为纵坐标,建立XY平面上差分位置与点云强度的相关性三维特性图。
采用上述技术方案后,本发明与背景技术相比,具有如下优点:
1、本发明提出的全波形TLS激光束为小光斑,小光斑具有对形状特征刻画精细的特点。小光斑和激光点云的特征层融合提供了新的理论框架,将提高了三维对象类检测识别的类别数量和识别性能;同时,本发明把全波段分解成多个独立回波,然后基于神经网络对自动对回波进行识别,从而实现相关隐蔽目标的探测。
2、本发明通过建立分解拟合,多回波数据和点云局部提取特征,克服配准、遮挡等因素带来的影响,提高对三维空间对象的局部描述能力,实现不确定性联合关系的匹配。
3、本发明把全波段分解成多个独立回波,然后基于TLS多回波点云的位置、强度和能量等信息获取回波特性,可为边缘检测及树木等大场景目标提供重要研究基础。
4、本发明能在最小人工干预条件下实现TLS点云数据的智能化场景分析和解译,研究成果将在森林调查、隐蔽目标分析、军事作战以及救援救灾等方面发挥巨大作用,具有重要的学术价值和现实意义。
附图说明
图1为本发明流程图。
图2为点云预处理的示意图,图2(a)为原始点云,图2(b)为地面滤除与植被提取后的示意图。
图3为神经网络的训练表现示意图,浅色为损失率,深色为精确率。
图4植被遮挡区域及其植被遮挡目标的探测结果示意图,其中深色部分为隐蔽目标的探测结果。
图5点云目标位置差分特性图,纵坐标对应位置差分幅度,横坐标对应点云目标,图5(a)对应植被遮挡区域,图5b对应植被遮挡目标。
图6植被遮挡区域的差分位置矩阵特征值可视化图,图6(a)-图6(b)分别对应Quiver、Feather、Compass、Angle函数。
图7为植被遮挡目标的差分位置矩阵特征值可视化图,图7(a)-图7(b)分别对应Quiver、Feather、Compass、Angle函数。
图8为目标位置差值二次幂矩阵特征值和特征向量可视化图,图8(a)对应植被遮挡区域,图8(b)对应植被遮挡目标。
图9为植被遮挡区域的密度特性图,图9(a)-图9(c)分别对应x、y及z轴方向。
图10为植被遮挡目标的密度特性图,图10(a)-图10(c)分别对应x、y及z轴方向。
图11为植被NDI指数分析图。
图12为植被遮挡目标的可见性分析图,图12(a)为正面,图12(b)为斜侧面。
图13为强度特性图,图13(a)对应植被遮挡区域,图13(b)对应植被遮挡目标。
图14为XY平面上差分位置与能量强度的相关图,图14(a)为隐蔽目标点云强度与XY平面遮挡目标差分位置距离相关性特性图,图14(b)为植被遮挡区域在X轴和Y轴方向上差分位置距离与点云强度的相关性特性图;图14(c)对图14(b)根据点云强度进行划分;图14(d)为建立XY平面上差分位置与点云强度的相关性的三维特性图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请参考图1所示,本发明包括两块核心内容,分别为植被遮挡目标探测与植被遮挡目标分析。下面结合具体实施例对二者进行论述。
实施例1
一种用于TLS多回波点云植被遮挡目标的探测方法主要包括以下步骤:
S1、对TLS多回波点云进行点云预处理。
根据全波形TLS获取的多回波点云,为了消除冗余信息,用向上生长法进行地面滤除,然后用基于体素的向上交错分析法进行植被提取。原始点云如图2(a)所示,滤除冗余地面以及植被提取结果如图2(b)所示。
S2、将预处理后的点云处理成数据集输入神经网络,进行神经网络的训练。
将点云分别投影到xy、yz及xz平面,结合点云的强度信息,构成点云的不同三维属性(x,y,I)、(y,z,I)和(x,z,I)并进行训练,其后输入神经网络进行训练。经实验论证,(x,y,I)的训练效果最好,损失率和精确率结果如图3所示,因此,本实施例采用(x,y,I)数据集进行训练。
S3、利用训练好的神经网络识别中间回波,根据识别的中间回波,找出植被遮挡冠层,以此确定植被遮挡区域。
网络训练完成以后,就可以对TLS多回波中的单次回波、一次回波、中间回波和最后回波进行识别了。由于本发明需要提取植被遮挡区域(即植被遮挡冠层),因此主要针对中间回波进行识别,中间回波识别结果合实际中间回波进行对比,发现精确率达到90%以上。
其后,利用Deep Kd-networks[10]的生成比拟树木遮挡区域TLS多回波点云的生成。将单次回波、一次回波、中间回波和末次回波分别标记为网络的第一层(叶节点)、第二层、第三层和最四层。训练类似于KD树的神经网络,让其学习植被遮挡区域末次回波的形成过程,以区别非植被遮挡区域的末次回波,从而滤除非植被遮挡目标(即显性目标),探测末次回波里面的植被遮挡目标(即隐蔽目标)。植被遮挡区域与植被遮挡目标的探测结果如图4所示,其中,深色部分为植被遮挡目标。如此,即可完成植被遮挡目标的探测。
实施例2
一种用于TLS多回波点云植被遮挡目标的分析方法在实施例1的基础上进行,其包括后续步骤S5。
S5、对植被遮挡目标,进行可见性分析。
S51、对植被遮挡目标进行差分位置分析。
S511、计算植被遮挡区域和植被遮挡目标相邻点之间的三维坐标差值,获得差分位置矩阵。
为了能够探寻激光束在穿透树叶间隙时,所贯穿的树木冠层和隐蔽目标三维坐标的变化并挖掘其位置特性。本发明分别计算树冠遮挡区域和隐蔽目标相邻点之间的三维坐标差值:
dx=xi-xi-1;
dy=yi-yi-1;
dz=zi-zi-1;

式中,其中i为样本中第i个点,xi、yi及zi分别为第i个点的三维坐标,dx、dy及dz分别为三维坐标的的差值,A为差值幅度。随之,本发明利用目标点云的差分位置矩阵特征值大小和特征向量方向的变化,分析遮挡目标对隐蔽目标的影响。
S512、将得到的差分位置矩阵求特征值,得到复数矩阵,分别用Quiver,Feather,Compass,Angle函数,得到植被遮挡区域和植被遮挡目标的差分位置矩阵特征值可视化图形。
图5为截取的部分植被遮挡区域的位置差分特性和植被遮挡目标的位置差分特性。横坐标代表点的三维坐标差分个数,纵坐标代表点云的差分幅度A。当植被遮挡区域点与点之间距离变大时(图中间区域),植被遮挡目标的点间距很小,说明捕获的植被遮挡目标的点的密度更大,对于其特性的分析更加具有优势。可以看出植被遮挡区域在位置分布上更加均匀分布,而植被遮挡目标在分布上具有很大的不确定性,主要是受植被郁闭度的影响。将得到的差值矩阵求特征值,得到复数矩阵,分别用Quiver,Feather,Compass,Angle函数,得到植被遮挡区域和植被遮挡目标的特征值特性,如图6和图7。
S513、对三维坐标差值做二次幂变换和log函数变换,得到植被遮挡区域和植被遮挡目标的二次幂矩阵特征值和特征向量的可视化图形。
为了进一步可视化分析遮挡目标和隐蔽目标差分位置的相对变化。本发明对坐标差值做二次幂变换和log函数变换,得到图8。其中EVAL代表特征值样本,EVEC代表特征向量样本。用颜色标记差分位置特征值的大小和特征向量的变化的方向幅度。
从图8可以看出,当遮挡目标特征值和特征向量变化幅度很大时(图8(a)样本1和样本2)时,对应的隐蔽目标特征值变化幅度很小,特征向量的变化更加连续(图8(b):EVEC样本1和EVEC样本2整体连贯性更强)。这说明当树木冠层的叶簇稀疏的频繁变化有利于隐蔽目标点云的生成,被叶簇遮挡的隐蔽目标信息可能更加完善。当遮挡目标特征向量变化幅度较小时(图8(a)样本3)时,对应的隐蔽目标特征向量方向更加具有不连贯性(图8(b):EVEC样本3中间部分明显缺失)。
S52、对植被遮挡目标进行回波密度分析。
S521、获取植被遮挡区域与植被遮挡目标在x、y、z上的点云密度值,并进行归一化。
实验统计了多个树冠层中植被遮挡区域和植被遮挡目标在x,y,z上的密度特性如图9和10。其中颜色的深浅和线条密集程度反映了密度的大小。线条越密集、颜色越深,代表密度越大。从中可以看出不管在x,y还是z轴,如果植被遮挡区域的密度变大,相应的隐蔽目标会变得稀疏。相反,如果植被遮挡区域变稀疏,那么隐蔽目标的密度会有所增加。
S522、为对植被遮挡目标进行可见性分析,本发明为植被遮挡区域引入NDI指数。
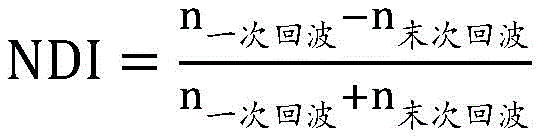
其中,n一次回波代表一次回波的距离范围均值,n末次回波代表末次回波的距离范围均值。
S523、以归一化的点云密度值为横坐标,以NDI指数为纵坐标,获得NDI指数随点云密度变化的示意图,以此达到可见性分析的需要,其结果如图11所示。
由图11中曲线可知,NDI指数随着植被点云密度的增大而减少,特别是当植被冠层点云密度达到一定程度时,NDI指数骤降。因此,本发明中遮挡可见性分析方法适用于高层次少间隙的叶簇穿透模型。由图12选取的三维点云来看,当树叶茂盛时,对于后面的建筑物,该树叶冠层将变得几乎不可穿透。
S53、对植被遮挡目标进行回波强度分析。
点云场景中,位于不同位置的点,会因为TLS的相对位置与距离范围、点的质地属性等人为因素和自然因素而后向散射出不同强度值的激光束。激光的能量后向散射传输公式为:

其中Pt是发射功率,ρ是反射率,R是有效散射半径。这个方程式描述相关功率密度的高低。随着激光束的传播。获得散射体截获的功率密度必须乘以有效散面积As。因为激光波长总是小于散射元素的大小,有效面积只是激光束与目标接触的投影面积。一些能量被散射体接收而被吸收,其余的是向不同方向重新辐射。
S531、以点云强度值为横坐标,以点个数为纵坐标,同时,以不同颜色区分不同强度值,获得植被遮挡区域与植被遮挡目标的强度特性图。
树冠层中遮挡目标和隐蔽目标的强度特性如图13,其中横坐标代表点云强度值,纵坐标为该强度值下点云个数。颜色变化的深浅也代表强度值变化的趋势,如红黄色代表强度高,绿色代表强度适中,蓝色代表强度很低。从图13中可以看出遮挡目标强度均值明显高于隐蔽目标。遮挡目标点的众数落在[3200,3300]区间,而隐蔽目标点的众数落在[2400,2500]区间。确定强度阈值,可以划分具有不同质地属性的目标。
S532、以XY平面植被遮挡区域的差分位置距离为横坐标,以植被遮挡目标的点云强度为纵坐标,获得二者的相关性二维特性图。
S533、分别以植被遮挡区域在X轴与Y轴方向上的差分位置距离dx和dy为X轴与Y轴,以植被遮挡目标的点云强度为纵坐标,建立XY平面上差分位置与点云强度的相关性三维特性图。
由基于PointNet的中间回波植被遮挡区域提取的实验发现,单靠目标的三维坐标区分遮挡区域和非遮挡区域效果并不理想。而且实验发现对于中间回波,其点云坐标x,y和回波强度I相关性较好。为继续探索和验证该结论,本发明选取了一段植被遮挡区域实验样本,如图14。图14(a)描述了遮挡目标XY平面上点云差分位置距离和隐蔽目标点云回波强度的关系。实现发现隐蔽目标回波强度与植被点云差分位置距离成正相关。如图14(b)(c),横坐标和纵坐标分别代表植被等遮挡目标在x轴和y轴方向上的差分位置距离dx和dy,黄色区域代表隐蔽目标点云强度最强的点,蓝色区域代表隐蔽目标点云强度最弱的点。由图14(d)可知,如果植被点云中点与点之间在XY平面上的距离差值越大,那么激光束穿透的几率越高,由此隐蔽目标产生的回波强度也不会因为遮挡效果而发生巨大衰减。而由图像蓝色区域可知,点与点之间间隔很小,即在树丛密集的情况下,树冠层会很大程度地衰减激光束强度,从而大大影响了隐蔽目标的探测。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
Claims (6)
1.一种用于TLS多回波点云植被遮挡目标的探测方法,其特征在于,包括:
S1、对TLS多回波点云进行点云预处理;
S11、采用向上生长法进行地面滤除;
S12、采用基于体素的向上交错分析法进行植被提取;
S2、将预处理后的点云处理成数据集输入神经网络,进行神经网络的训练;
S3、利用训练好的神经网络识别中间回波,根据识别的中间回波,找出植被遮挡冠层,以此确定植被遮挡区域;
S4、利用末次回波滤除植被遮挡区域中的非植被遮挡目标,以此探测植被遮挡目标,具体为,利用S2训练好的神经网络识别单次回波、一次回波以及末次回波,将单次回波、一次回波、中间回波以及末次回波分别标记为网络的第一层、第二层、第三层以及第四层,训练基于KD树思想的神经网络,学习植被遮挡区域末次回波的形成过程,以区分非植被遮挡区域的末次回波,从而探测末次回波中的植被遮挡目标。
2.如权利要求1所述的一种用于TLS多回波点云植被遮挡目标的探测方法,其特征在于:步骤S2具体为,将点云投影到xy平面,结合点云的强度信息,构成数据集;将数据集输入神经网络,进行神经网络的训练。
3.一种用于TLS多回波点云植被遮挡目标的分析方法,用于对如权利要求1-2任一项所述的探测方法获得的探测结果进行可见性分析,其特征在于:在所述步骤S4之后进行步骤S5:
S5、对植被遮挡目标,进行可见性分析,其包括:
S51、对植被遮挡目标进行差分位置分析;
S52、对植被遮挡目标进行回波密度分析;
S53、对植被遮挡目标进行回波强度分析。
4.如权利要求3所述的一种用于TLS多回波点云植被遮挡目标的分析方法,其特征在于:步骤S51中,点云差分位置分析具体为,
S511、计算植被遮挡区域和植被遮挡目标相邻点之间的三维坐标差值,获得差分位置矩阵;
S512、将得到的差分位置矩阵求特征值,得到复数矩阵,分别用Quiver,Feather,Compass,Angle函数,得到植被遮挡区域和植被遮挡目标的差分位置矩阵特征值可视化图形;
S513、对三维坐标差值做二次幂变换和log函数变换,得到植被遮挡区域和植被遮挡目标的二次幂矩阵特征值和特征向量的可视化图形。
5.如权利要求3所述的一种用于TLS多回波点云植被遮挡目标的分析方法,其特征在于:步骤S52具体为,
S521、获取植被遮挡区域与植被遮挡目标在x、y、z上的点云密度值,并进行归一化;
S522、计算多回波NDI指数,则有,

其中,n一次回波代表一次回波的距离范围均值,n末次回波代表末次回波的距离范围均值;
S523、以归一化的点云密度值为横坐标,以NDI指数为纵坐标,获得NDI指数随点云密度变化的示意图。
6.如权利要求3所述的一种用于TLS多回波点云植被遮挡目标的分析方法,其特征在于:步骤S53具体为,
S531、以点云强度值为横坐标,以点个数为纵坐标,同时,以不同颜色区分不同强度值,获得植被遮挡区域与植被遮挡目标的强度特性图;
S532、以XY平面植被遮挡区域的差分位置距离为横坐标,以植被遮挡目标的点云强度为纵坐标,获得二者的相关性二维特性图;
S533、分别以植被遮挡区域在X轴与Y轴方向上的差分位置距离dx和dy为X轴与Y轴,以植被遮挡目标的点云强度为纵坐标,建立XY平面上差分位置与点云强度的相关性三维特性图。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811494004.4A CN109613552B (zh) | 2018-12-07 | 2018-12-07 | 一种用于tls多回波点云植被遮挡目标的探测和分析方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811494004.4A CN109613552B (zh) | 2018-12-07 | 2018-12-07 | 一种用于tls多回波点云植被遮挡目标的探测和分析方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109613552A CN109613552A (zh) | 2019-04-12 |
| CN109613552B true CN109613552B (zh) | 2020-11-10 |
Family
ID=66008523
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811494004.4A Active CN109613552B (zh) | 2018-12-07 | 2018-12-07 | 一种用于tls多回波点云植被遮挡目标的探测和分析方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109613552B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110399655A (zh) * | 2019-07-08 | 2019-11-01 | 自然资源部海洋减灾中心 | 一种基于机器学习预测植被消波的方法 |
| AU2020428327B2 (en) * | 2020-02-14 | 2023-11-16 | Ntt, Inc. | Learning device, learning method, and learning program |
| CN112068153B (zh) * | 2020-08-24 | 2022-07-29 | 电子科技大学 | 一种基于地基激光雷达点云的冠层间隙率估算方法 |
| CN114779202B (zh) * | 2022-06-17 | 2022-10-04 | 之江实验室 | 一种树林遮蔽目标的探测、识别及定位方法及装置、系统 |
| JP7653549B1 (ja) | 2024-01-22 | 2025-03-28 | 株式会社京三製作所 | 検知装置および検知方法 |
| CN119919673A (zh) * | 2025-04-02 | 2025-05-02 | 湖北迈睿达供应链股份有限公司 | 一种基于映射激光的被遮挡目标的确定方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103035006A (zh) * | 2012-12-14 | 2013-04-10 | 南京大学 | 一种LiDAR辅助下基于LEGION的高分辨率航空影像分割方法 |
| CN104318611A (zh) * | 2014-10-27 | 2015-01-28 | 祁海江 | 一种基于激光扫描点云的三维树木重建方法 |
| CN105701856A (zh) * | 2016-01-15 | 2016-06-22 | 厦门大学 | 一种植被提取方法及系统 |
| CN106599808A (zh) * | 2016-12-01 | 2017-04-26 | 中国科学院光电研究院 | 一种基于全波形激光雷达数据的隐蔽目标提取方法 |
| CN106651863A (zh) * | 2016-11-30 | 2017-05-10 | 厦门大学 | 一种基于点云数据的树木自动分割方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9063544B2 (en) * | 2012-09-19 | 2015-06-23 | The Boeing Company | Aerial forest inventory system |
| CN105469098B (zh) * | 2015-11-20 | 2018-10-12 | 中北大学 | 一种自适应特征权重合成的lidar数据地物精确分类方法 |
| CN105551082B (zh) * | 2015-12-02 | 2018-09-07 | 百度在线网络技术(北京)有限公司 | 一种基于激光点云的路面识别方法及装置 |
| CN106408011B (zh) * | 2016-09-09 | 2020-04-17 | 厦门大学 | 基于深度学习的激光扫描三维点云树木自动分类方法 |
| CN107944383A (zh) * | 2017-11-21 | 2018-04-20 | 航天科工智慧产业发展有限公司 | 基于三维Voronoi图的建筑物屋顶面片分割方法 |
-
2018
- 2018-12-07 CN CN201811494004.4A patent/CN109613552B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103035006A (zh) * | 2012-12-14 | 2013-04-10 | 南京大学 | 一种LiDAR辅助下基于LEGION的高分辨率航空影像分割方法 |
| CN104318611A (zh) * | 2014-10-27 | 2015-01-28 | 祁海江 | 一种基于激光扫描点云的三维树木重建方法 |
| CN105701856A (zh) * | 2016-01-15 | 2016-06-22 | 厦门大学 | 一种植被提取方法及系统 |
| CN106651863A (zh) * | 2016-11-30 | 2017-05-10 | 厦门大学 | 一种基于点云数据的树木自动分割方法 |
| CN106599808A (zh) * | 2016-12-01 | 2017-04-26 | 中国科学院光电研究院 | 一种基于全波形激光雷达数据的隐蔽目标提取方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109613552A (zh) | 2019-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109613552B (zh) | 一种用于tls多回波点云植被遮挡目标的探测和分析方法 | |
| JP5891560B2 (ja) | 三次元画像を形成するための識別専用オプトロニックシステムおよび方法 | |
| CN106066154B (zh) | 一种适用于快速扫描场景的靶标及其控制点的提取方法 | |
| CN104155638B (zh) | 一种基于LiDAR伪垂直波形模型的树种分类方法 | |
| JP2008292449A (ja) | 水中で対象物を検知し分類する自動目標識別システム | |
| Liu et al. | Classification of airborne lidar intensity data using statistical analysis and hough transform with application to power line corridors | |
| JP6207144B2 (ja) | シーン内の対象物を3d再構成するための方法 | |
| CN104820830A (zh) | 一种基于全波形LiDAR冠层剖面模型的树种识别方法 | |
| CN109061658B (zh) | 激光雷达数据融合方法 | |
| CN112859027B (zh) | 一种基于一维距离像的诱饵阵列干扰效能分析方法 | |
| CN115964837B (zh) | 基于光线跟踪的水下复杂目标激光扫描点云仿真方法 | |
| Del Rio Vera et al. | Automatic target recognition in synthetic aperture sonar images based on geometrical feature extraction | |
| Pesci et al. | Remote sensing of volcanic terrains by terrestrial laser scanner: preliminary reflectance and RGB implications for studying Vesuvius crater (Italy) | |
| CN119168890B (zh) | 一种基于毫米波和视觉图像融合的点云生成方法和装置 | |
| CN120103310A (zh) | 一种适用于复杂场景的激光雷达测距过程仿真方法 | |
| Li et al. | A novel full-waveform LiDAR echo decomposition method and simulation verification | |
| Moik et al. | Measurement of sawlog stacks on an individual log basis using LiDAR | |
| KR101696088B1 (ko) | 초음파 물체 인식 방법 및 장치 | |
| Groenwall et al. | Methods for recognition of natural and man-made objects using laser radar data | |
| Czúni et al. | Color based clustering for trunk segmentation | |
| Grönwall | Ground Object Recognition using Laser Radar Data Geometric Fitting, Performance Analysis, and Applications | |
| CN120762046B (zh) | 一种高精度地理空间信息的采集测绘方法及系统 | |
| Guo et al. | A pregeneration–recognition method of detecting weak seafloor echoes for full-waveform airborne LiDAR bathymetry | |
| Lindberg | Estimation of canopy structure and individual trees from laser scanning data | |
| CN120742273B (zh) | 一种蓝绿激光雷达的表面点云高密度噪声处理方法、系统、终端及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |