CN108463173B - 超声成像系统探头和系统以及成像方法 - Google Patents
超声成像系统探头和系统以及成像方法 Download PDFInfo
- Publication number
- CN108463173B CN108463173B CN201680078538.1A CN201680078538A CN108463173B CN 108463173 B CN108463173 B CN 108463173B CN 201680078538 A CN201680078538 A CN 201680078538A CN 108463173 B CN108463173 B CN 108463173B
- Authority
- CN
- China
- Prior art keywords
- frequency
- ultrasound
- analog
- imaging
- transducer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52046—Techniques for image enhancement involving transmitter or receiver
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
- A61B8/065—Measuring blood flow to determine blood output from the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8925—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array the array being a two-dimensional transducer configuration, i.e. matrix or orthogonal linear arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52025—Details of receivers for pulse systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52036—Details of receivers using analysis of echo signal for target characterisation
- G01S7/52038—Details of receivers using analysis of echo signal for target characterisation involving non-linear properties of the propagation medium or of the reflective target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52077—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging with means for elimination of unwanted signals, e.g. noise or interference
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52079—Constructional features
- G01S7/5208—Constructional features with integration of processing functions inside probe or scanhead
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52085—Details related to the ultrasound signal acquisition, e.g. scan sequences
- G01S7/5209—Details related to the ultrasound signal acquisition, e.g. scan sequences using multibeam transmission
- G01S7/52092—Details related to the ultrasound signal acquisition, e.g. scan sequences using multibeam transmission using frequency diversity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M3/00—Conversion of analogue values to or from differential modulation
- H03M3/30—Delta-sigma modulation
- H03M3/458—Analogue/digital converters using delta-sigma modulation as an intermediate step
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Radiology & Medical Imaging (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Acoustics & Sound (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Nonlinear Science (AREA)
- Cardiology (AREA)
- Hematology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
一种超声成像系统探头包括成像换能器头部和用于处理接收到的反射超声信号的接收电路。所述接收电路包括模数西格玛德尔塔转换器,所述模数西格玛德尔塔转换器包括闭合回路,所述闭合回路包括可调谐带通滤波器。这使得模数转换器能够仅处理期望的频带。以这种方式,ADC转换带宽和ENOB是可编程的,从而给定更高效的探头设计,并且还实现信号处理链中的早期模数转换。
Description
技术领域
本发明涉及一种超声成像系统探头和整个系统,以及一种成像方法。其具体而言涉及被用于这样的成像应用中的模数转换器电路。
背景技术
谐波超声成像是正赢得增加的兴趣的一种特定类型的超声成像技术。其利用通过身体组织的超声的非线性传播。波的高压部分比低压部分更快地行进,导致波的形状的失真。波形的该改变导致从组织的谐波(基频或者发射频率的倍数)的生成。例如,使用第二谐波产生图像是已知的,因为后续谐波具有减小的幅度并且因此不足以生成适当的图像。
在组织内生成的谐波随着深度增加到最大强度点并且然后由于衰减随着另外的深度而减小。因此,在表面下面的最佳深度处实现最大强度。
谐波成像基于实现高穿透的相对低频率超声波的发射;以及由于不同的散射体在反射中出现的发射信号的谐波中的一个或多个的接收。以这种方式,更高的穿透深度可以与针对更高的频率可实现的更高的特定分辨率组合。
谐波成像具有非常宽和增加的应用。其被用在经典的超声成像中以利用低频率(例如,2.5至6MHz)超声获得更好的特定分辨率。当更高的频率被使用时,其变为甚至更感兴趣的成像方法,因为现有方法按比例变得更复杂并且昂贵。特别地,高频超声的低穿透深度要求可以规避该问题的成像技术。
除经典成像应用之外,谐波成像可以在如组织表征的应用中扮演重要角色,其中,其可以通过以特定频率或者频率组合提供准确的幅度测量结果来实现不同的组织之间的准确的区分。精细幅度和频率分辨率可以提供关于组织、边界和异常的信息。
关于超声成像系统的问题是接收到的信息的噪声的信号。这通过更早地提供模数转换(对于数字信号而言,连接性和信号处理对于噪声和干扰更鲁棒)来改进,但是这引起接收器电路的更高的功耗。
文章"A 1.8V CMOS fourth-order Gm-C bandpass sigma-delta modulatordedicated to front-end ultrasonic receivers"(在Analog Integrated Circuits andSignal Processing第48卷、第2号、2006年5月9日第121-132页(XP 019390181)中)公开了超声接收器,其利用带通西格玛德尔塔转换器,使得接收器可以被调谐到不同的频率。
发明内容
本发明由权利要求书定义。
根据本发明的方面的范例,提供了一种超声成像系统探头,包括:
成像换能器头部,其被布置为以发射超声频率发射超声信号;以及
接收电路,其用于处理接收到的反射超声信号,
其中,所述接收电路包括包含闭合回路的模数西格玛德尔塔转换器,所述闭合回路包括具有可调谐的中心频率和带宽的可调谐带通滤波器,并且
其中,所述可调谐带通滤波器的通带的中心在第一频率与第二频率之间可调谐,所述第一频率对应于发射超声频率,并且所述第二频率对应于所述发射超声频率的期望的谐波。
本发明因此利用带通西格玛德尔塔ADC。可以存在一个或多个模数西格玛德尔塔转换器。这些是来自主要地由如软件定义无线电的应用驱动的新兴技术的设备,其中,该类型的转换器可以提供架构的要求的灵活性和可编程性。提供了可编程的中心频率,并且通带通过超声采集电子设备选择。此外,通带和中心频率可以例如在发射的信号频率或者发射信号的期望的谐波之间准确地调谐,使得ADC可以有效地被定位以仅处理期望的频带。这可以通过引入使用已知发射频率或者其谐波作为参考的带通调谐电路来完成。基于被包含在所述ADC闭(反馈)环中的所述可编程的带通滤波器,所述探头可以具有非常高的频率选择性和非常高的幅度分辨率。模数转换器还可以具有可编程时钟频率和DAC可缩放性。
所述带通转换旨在通过仅转换所述期望的频带来优化能量利用。
所述可调谐带通滤波器的通带的中心可以因此对应于发射超声频率或者所述发射超声频率的期望的谐波。带通转换影响可实现的信噪比,因为在所述频带之外的噪声不再影响操作。这使得系统能够在不链接用于ADC的建立块的噪声性能的情况下在更高的分辨率的情况下缩放频带。
所述换能器头部可以包括换能器元件阵列,并且其中,所述信号处理电路包括用于所述换能器头部的每个换能器元件或者用于换能器元件组的模数西格玛德尔塔转换器。以这种方式,存在所述单独的换能器元件的水平处的数字化。
所述接收电路可以然后包括每个换能器元件与相应的模数西格玛德尔塔转换器之间的放大器。
所述带通滤波器可以在低分辨率高带宽模式与高分辨率低带宽模式之间可调谐。这两个模式然后对应于用于在其中使用所述探头的超声成像系统的不同的成像模式。
所述带通滤波器还可以可调谐到中分辨率中等带宽模式。然后存在至少三个不同的成像模式。
本发明还提供一种超声系统,包括:
如上文所定义的超声成像系统;
控制器,其用于控制所述探头;
波束形成器;以及
信号处理电路,其用于处理来自所述接收电路的信号以生成超声图像。
所述超声系统可以处理接收到的反射超声信号,所述反射超声信号是发射超声信号的谐波。
所述控制器可以适于与在所述超声系统的不同的接收操作模式之间切换同步控制所述可调谐带通滤波器。这些接收操作模式可以定义不同的分辨率与带宽选择。因此,带通滤波器的调谐取决于使用的发射频率以及使用的接收模式。
根据本发明的另一方面的范例提供了一种超声成像方法,包括:
使用成像换能器头部将超声提供到要成像的体积中;并且
通过在模数西格玛德尔塔转换器的闭合回路内调谐带通滤波器来处理接收到的反射超声信号,所述带通滤波器具有可调谐的中心频率和带宽,
其中,所述方法包括将可调谐带通滤波器的通带的中心设置到发射超声频率或者所述发射超声频率的期望的谐波。
另外,所述通带可以被设置为另一中心频率或者带宽。这可以当所述使用的发射波束形成或者信号类型(例如,蜂鸣)导致不同的频带中的信号分量的出现时被要求。
所述换能器头部可以包括换能器元件的阵列,并且其中,所述方法包括针对所述换能器头部的每个换能器元件个体地执行模数转换。
附图说明
现在将参考附图详细描述本发明的范例,其中:
图1示出了可以被修改为使用本发明的超声探头设计的已知超声成像系统;
图2更详细地示出了探头信号的模数转换的第一已知方法;
图3更详细地示出了探头信号的模数转换的已知方法的第二范例;
图4更详细地示出了探头信号的模数转换的方法的第三范例;
图5示出了不同的超声探头技术并且具体地压力-电学转换换能器如何具有不同的频率特性;
图6示出了不同的操作模式可以如何被使用;
图7示出了已知的西格玛德尔塔模数转换器;
图8示出了图7的转换器的输出信号的频率特性;
图9示出了用于本发明的超声探头中的可调谐西格玛德尔塔模数转换器;
图10示出了三个不同的操作模式中图9的转换器的频率特性;
图11示出了用于控制图9的可调谐西格玛德尔塔模数转换器的调谐的控制电路;
图12示出了具有可调谐带通滤波器的第一范例的图9的可调谐西格玛德尔塔模数转换器;并且
图13示出了具有可调谐带通滤波器的第二范例的图9的可调谐西格玛德尔塔模数转换器。
具体实施方式
本发明提供了超声成像系统探头,其包括成像换能器头部和用于处理接收到的反射超声信号的接收电路。接收电路包括模数西格玛德尔塔转换器,所述转换器包括闭合回路,所述闭合回路包括可调谐带通滤波器。这使得模数转换器能够仅处理期望的频带。以这种方式,所述ADC转换带宽和有效位数(ENOB)是可编程的,从而给定更高效的探头设计,并且还实现信号处理链中的早期模数转换。
参考图1,首先将描述超声诊断成像系统的总体操作。
注意,下面具体地描述了系统的接收功能,因为本发明涉及接收通道中的模数转换。
系统包括超声探头10,超声探头10具有用于发射超声波和接收回波信息的CMUT换能器阵列10’。换能器阵列10’可以备选地包括由诸如PZT或者PVDF的材料形成的压电换能器元件。换能器阵列10’是能够在2D平面内扫描或者在三维内扫描以用于3D成像的换能器元件的一维或二维阵列。
换能器阵列10’耦合到探头中的(任选的)微波束形成器12,其控制通过CMUT阵列单元或者压电元件的信号的接收。微波束形成器能够对由换能器元件的组或“片块”接收到的信号进行至少部分波束形成,如在美国专利5997479(Savord等人)、6013032(Savord)和6623432(Powers等人)中所描述的。
微波束形成器12通过探头线缆耦合到发射/接收(T/R)开关16,所述开关在发射与接收之间切换并且当微波束形成器未被使用并且换能器阵列直接地由主系统波束形成器操作时使主波束形成器20免受高能发射信号的影响。从换能器阵列10的超声波束的发射通过换能器控制器18引导,所述换能器控制器通过T/R开关16耦合到微波束形成器并且耦合到主发射波束形成器(未示出),其从用户接口或者控制面板38的用户的操作接收输入。
由换能器控制器18控制的功能之一是波束操纵和聚焦的方向。波束可以从换能器阵列向前(正交于其)或者针对更宽的视场在不同的角度处操纵。换能器控制器18可以耦合以控制用于CMUT阵列的DC偏置控制45。DC偏置控制45设置被施加到CMUT单元的(一个或多个)DC偏置电压。
在接收通道中,部分波束形成信号由微波束形成器12产生并且耦合到主接收波束形成器20,其中,来自换能器元件的个体片块的部分波束形成信号被组合为完全波束形成信号。例如,主波束形成器20可以具有128个通道,其中每个从数十个或者数百个CMUT换能器单元或者压电元件的片块接收部分波束形成信号。以这种方式,由换能器阵列的数千换能器元件接收到的信号可以有效地贡献于单个波束形成信号。
波束形成接收信号耦合到信号处理器22。信号处理器22可以以各种方式处理接收到的回波信号,诸如带通滤波、抽取、I和Q分量分离和谐波信号分离,其动作以将线性和非线性信号分离,从而使能识别从组织和微泡返回的非线性(基频的高次谐波)回波信号。信号处理器还可以执行额外的信号增强,诸如散斑抑制、信号复合和噪声消除。信号处理器中的带通滤波器可以是跟踪滤波器,当回波信号从增加的深度接收到时,其通带从较高频带滑动到较低频带,从而拒绝来自较大的深度的较高频处的噪声,其中,这些频率缺乏解剖信息。
用于发射和用于接收的波束形成器被实施在不同的硬件中并且可以具有不同的功能。当然,在考虑发射波束形成器的特性的情况下设计接收器波束形成器。在图1中,仅示出了接收器波束形成器12、20,因为本发明涉及接收信号处理通道。在完整的系统中,还将存在具有发射微波束形成器和主发射波束形成器的发射链。
微波束形成器12的功能是提供信号的初始组合以便减少模拟线缆的数目。这通常地模拟域中执行。
最后的波束形成在主波束形成器20中完成并且通常在数字化之后。
发射和接收通道使用具有固定的频带的相同的换能器阵列10’。然而,发射脉冲占用的带宽可以根据已经使用的发射波束形成而变化。接收通道可以捕获全部换能器带宽(其是经典的方法),或者通过使用带通处理,其可以仅提取包含有用信息的带宽(例如,主谐波的谐波)。
经处理的信号耦合到B模式(即,亮度模式,或者2D成像模式)处理器26和多普勒处理器28。B模式处理器26将对接收到的超声信号的幅度的检测用于对身体中的结构(诸如身体中的器官和血管的组织)的成像。身体的结构的B模式图像可以在谐波图像模式或者基波图像模式或者两者的组合中形成,如在美国专利6283919(Round等人)和美国专利6458083(Jago等人)中所描述的。多普勒处理器28处理来自组织移动和血流的时间上不同的信号以便检测物质的运动,诸如在像场中的血细胞的流动。多普勒处理器28通常地包括具有参数的壁滤波器,所述参数可以被设置为通过和/或拒绝从身体中选定类型的材料返回的回波。
例如,壁滤波器可以被设置成具有通带特性,其使来自较高速度的材料的相对低幅度的信号通过,同时拒绝来自较低速度或零速度的材料的相对强的信号。该通带特性将使来自流动血液的信号通过,同时拒绝附近的稳定或者缓慢移动对象(诸如心脏的壁)的信号。倒转特性将使来自心脏的移动组织的信号通过,同时拒绝血流信号,这被称为组织多普勒成像,其检测和描绘组织的运动。多普勒处理器接收并且处理来自图像场中的不同点的时间离散的回波信号,来自特定点的回波的序列被称为系综(ensemble)。在相对短的间隔内快速连续地接收的回波的系综可以被用于估计流动血液的多普勒频移,其中,多普勒频率与速度的对应性指示血流速度的。在更长的时间段内接收的回波的系综被用于估计较慢流动血液或者缓慢移动组织的速度。
由B模式和多普勒处理器产生的结构和运动信号耦合到扫描转换器32和多平面重新格式化器44。扫描转换器32以空间关系布置回波信号,根据所述空间关系,以期望的图像格式接收所述回波信号。例如,扫描转换器可以将回波信号布置为二维(2D)扇形格式或者金字塔三维(3D)图像。扫描转换器可以利用具有与图象场中的点处的运动对应的颜色将B模式结构图像交叠有其多普勒估计速度,以产生描绘组织和血流在图像场中的运动的彩色多普勒图像。多平面重新格式化器将从身体的体积区域中的公共平面中的点接收的回波转换为该平面的超声图像,如在美国专利6443896(Detmer)中所描述的。体积绘制器42将3D数据集的回波信号转换为如从给定参考点查看到的投影3D图像,如在美国专利6530885(Entrekin等人)中所描述的。
2D或3D图像从扫描转换器32、多平面重新格式化器44和体积绘制器42耦合到图像处理器30以用于进一步增强、缓冲和临时存储以显示在图像显示器40上。除了被用于成像之外,由多普勒处理器28产生的血流值和由B模式处理器26产生的组织结构信息被耦合到量化处理器34。量化处理器产生不同的流条件(诸如血流的体积率)的量度以及结构测量结果(诸如器官的尺寸和孕龄)。量化处理器可以从用户控制面板38接收输入,诸如其中要进行测量的图像的解剖结构中的点。来自量化处理器的输出数据耦合到图形处理器36以用于利用显示器40上的图像再现测量图形和值,并且用于来自显示设备40的音频输出。图形处理器36还可以生成用于与超声图像一起显示的图形交叠。这些图形交叠可以包含标准识别信息,诸如患者姓名、图像的日期和时间、成像参数等。出于这些目的,图形处理器从用户接口38接收输入,诸如患者姓名。用户接口还耦合到发射控制器18以控制从换能器阵列10’对超声信号的生成,并且因此控制由换能器阵列和超声系统产生的图像。控制器18的发射控制功能仅是所执行的功能之一。控制器18还考虑操作模式(由用户给定的)和对应的所要求的发射器配置和接收器模数转换器中的带通配置。控制器18可以是具有固定状态的状态机。
用户接口还耦合到多平面重新格式化器44,所述多平面重新格式化器用于选择和控制多幅多平面重新格式化(MPR)图像的平面,其可以被用于在MPR图像的图像场中执行量化测量。
本发明涉及对接收到的反射信号的信号处理,并且具体而言其涉及模数转换。在信号处理路径中的早期模数带通转换实现更有效的探头设计。
图1示出了在信号处理路径之前的微波束形成器12和波束形成器20,并且因此其在模拟域中操作。
存在以不同的方式执行信号处理的已知方法,并且具体而言模数转换可以在任何波束形成被实施之前完成。存在具有较早的数字化的两个不同的超声成像系统,如在图2和图3中所描绘的。
图2示出了作为单个块50的在接收到的信号的波束形成之后的信号处理。然而,这表示对应的区域50内的图1所示的各种单元的组合。
在图2中,接收到的信号使用模拟前端52处理,模拟前端52包括低噪声放大器(LNA)54、可编程的时间增益补偿(TGC)放大器56和防混叠滤波器(AAF)58,之后是模数转换器60。示出了发射接收(T/R)开关16,其包括模拟复用,使得模拟复用器选择要连接到波束形成器的减少数目的换能器元件组。选定的元件组然后针对每个声学线电子地更新。该方法例如被用在2D超声中。其在波束形成器20中执行数字波束形成之前将信号数字化。模数转换自身未在探头中执行。相反,长并且昂贵的线缆被用于将信号连接到后端。元件54在探头中并且在元件54与元件56之间存在长线缆。
在示出了通常被用于3D成像的架构的图3中,存在对组的个体像素的模拟微波束形成,之后是针对组的数字波束形成。如所示的,换能器阵列10’的换能器元件被划分为子阵列10a...10n。在每个子阵列内,每个换能器具有低噪声放大器(LNA)54,以及可编程的时间增益补偿(TGC)放大器56,之后是在模拟域中操作的微波束形成器12。然后存在针对子阵列的信号的加和,之后是使用模数转换器60的模数转换,之后是使用波速形成单元20的波束波束形成。
超声系统还对不同的功能块被定位在何处进行区分。在图2中,例如,通常在超声探头中实施模拟前端52的仅部分。相对而言,在被定位在扫描器中的后端系统中实现放大、滤波、波束形成和控制。
此外,每个系统具有多个通道,其中每个具有发射器和开关(包括二极管桥),所述开关允许高压发射脉冲到换能器元件的通道,但是阻止这些脉冲到达敏感接收器。回波返回到每个接收器,其包括串联的放大器,包括具有在用户控制下的针对TGC的可变增益的一个。每个通道的输出被传递给接收波束形成器20。
来自身体的脉冲回波信号由阵列元件接收并且穿过个体用户可调节TGC放大器以补偿通过随着距离的身体衰减和折射的回波的减弱。这些信号然后传递给接收波束形成器20。
图4以示意性形式示出了数字化高度并行前端。每个换能器元件耦合到并入了时间增益补偿(TGC)功能的相关联放大器20。该方法提供接收到的信号的早期数字化。模数转换可以然后在探头中实施,使得连接线缆在到数字域的转换之后。
来自放大器20的输出在先进先出(FIFO)寄存器62中的缓冲之前在模数转换器60中被数字化,寄存器62在加法器64中的加和之前实施可变延迟。
存在将早期数字化用于许多类型的换能器配置(包括用于3D成像的换能器)的许多益处。
然而,早期数字化具体地提出需求对于前端电子器件的尺寸和功耗和ADC功能的要求。在分辨率方面(诸如有效位数ENOB和转换带宽BW)ADC功能的要求可以显著地从一个操作模式变化到另一个。ENOB和BW是通过特定应用(成像模式或者从成像的关键特征提取)的要求确定的两个最重要的参数。这些参数还确定整个成像系统的要加和个体构建块的详细规格。
在超声成像系统中,可用的信号频带由超声换能的频率响应确定。如在图5中所图示的,不同的换能器在不同的频率范围中操作(其声学性能随着发射频率变化)。图5示出了用于PZT、CMUT和晶体(XTAL)换能器的信号与频率。
低频实现更多穿透并且较高频实现经改进的组织填充、更精细的细节和第三谐波成像。更高次谐波成像可以通过使用宽带换能器或者通过使用谐波成像频率处的窄带换能器来实现。
CMUT换能器具有操作的最宽的频带。同时,全频率带宽绝不一直被使用。实际上,大多数成像模式仅使用总频带的部分,如在图6中所示。
图6示出了用于不同的成像模式的CMUT换能器的不同的频率响应。黑色绘图20示出了光谱实况多普勒测量模式。可以在WO 2015/028945A3中找到关于针对不同的成像模式的CMUT换能器频率响应的更多细节。
介质中的超声波的衰减是影响前端电子设备的配置的实质性因子。超声波在对数标度而不是线性标度上衰减。
本发明基于以下认识:可调整的带通信号处理方法可以被用于根据每个成像模式的要求对每个测量结果的带宽和分辨率进行调整。
常规ADC是低通的,这意指其可以转换被定位在DC与频率FN之间的信号,其中,FN是系统的奈奎斯特频率。
图7示出了适于超声图像处理的西格玛德尔塔ADC的结构。
模式输入i(t)在由1位模数转换器72定时之前在滤波器70中被低通滤波以生成数字输出o[Ts]。反馈路径包括1位数模转换器74,并且模拟反馈信号fb(t)与输入组合以导出被供应给低通滤波器70的差异信号d(t)。
注意,多位ADC和DAC可以代替地被使用在反馈回路中。
图8示出了期望的信号带80、奈奎斯特频率82和过采样频带84。
在其经典的低通操作中,该转换器转换相当大的信号带宽,其可以超过期望的输入信号的带宽数次。此外,可以实现的准确度极大地取决于转换带宽多么大。明显地,在当期望的信号处在高频处的窄带中时的情况下,这两个转换器在功耗和性能方面变得非常低效并且在那之上产生对于适当的图像构建没有用的许多数据。
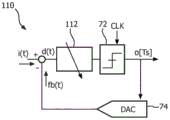
图9示出了根据本发明修改的模数转换器110。模拟输入i(t)在由1位模数转换器(还如在图7中)在幅度和时间中量化以生成数字输出o[Ts]之前在滤波器112中被滤波。反馈路径包括1位数模转换器74,并且模拟反馈信号fb(t)与输入组合以导出被供应给滤波器112的差异信号d(t)。
如上文所解释的,在一般情况下,闭合回路中的ADC和DAC可以是多位的。
模数转换器可以具有可编程时钟频率和DAC可缩放性。
时钟频率可以被调节以便实现以下益处:
(i)其可以被增加以通过有效地增加针对该带的过采样率来增加转换通带中的分辨率,
(ii)其可以被减小以便节省功率(从而在不需要时牺牲一些分辨率),
(iii)其还可以被用于调谐系统。系统操作是环路滤波器与时钟频率的相互作用的结果。当实施针对回路滤波器系数的确切的期望值困难时,总体期望性能可以仍然通过调整时钟频率来实现。
固定时钟频率可以对于整个系统的简化实施方式是优选的。
如果时钟频率改变,则DAC可以被重新缩放以便利用新时钟确保相同的DAC输出。此外,ADC可以被缩放以容纳不同的最大输入信号。
滤波器112是可调谐带通滤波器。为了实现通带的最佳位置,滤波器可编程性可以由根据被用于特定成像模式的发射信号导出的同步信号来控制。这使能进一步优化总体信号处理链并且简化转换器的设计。
大多数经典模式(诸如亮度模式(B模式或2D模式)和多普勒模式)可以使用提出的原理,其带来仅转换期望的带宽的益处。
此外,可以采用在其中发射和接收使用相同的换能器阵列的谐波成像模式(例如,针对给定频率)。例如,发射器利用换能器的频带的低1/3来发射信号,而接收器在频带的上1/3中工作以采集发射信号的三次谐波。
此外,发射使用一个低频换能器的全带,而接收器使用具有被定位在3x较高频处的接收带的另一高频换能器。
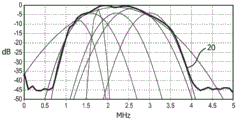
图10示出了滤波器112的通带和完整ADC的转换带。区域120示出了窄带非常高分辨率模式,例如高于具有200kHz的带宽的100dB。这实现用于组织表征的窄频带中的非常准确的幅度测量。
区域122示出了中等带和分辨率模式,例如大于80dB与1MHz的带宽。区域124示出了宽带低分辨率模式,例如大于50dB与3MHz的带宽。
因此,带通滤波器可以是在低分辨率高带宽模式与高分辨率低带宽模式之间可调谐的。高带宽模式例如具有超过1MHz(例如,超过1.5MHz并且可能地超过3MHz)的通带,而低/窄带宽模式具有小于1MHz(例如小于750kHz、例如小于500kHz和可能地小于250kHz)的通带。图10中的y轴图示了完整的A/D转换器的可实现动态范围(DR)。通常,动态范围被用于根据有效位数(ENOB)导出分辨率。ENOB=(SNR-1.76)/6.04,其中,在理想的情况下SNR(信噪比)=DR。
通带的中心频率被调谐到发射频率或者发射频率的谐波。存在用于发射频率的许多选项。通常,诊断成像使用2MHz到5MHz,然而对于具有导管的体内成像,可以使用30MHz或更高的频率。对于微脉管结构而言,可以采用更加高的频率。
在电路水平处执行调节模数转换器的中心频率。带通滤波器例如利用有源电路和无源电路的组合实现。这些可以被用于使所述滤波器的中心频率和通带适应于上文概述的各种模式。下面还讨论了这些模式。
针对低于1MHz的超声采集的窄带宽模式可以具有与几十kHz(例如,100kHz)一样窄的带宽。对应的高分辨率是指采集电子设备的动态范围(DR)和信噪比(SNR)。如果其超过低于12位有效位数(ENOB)的经典B模式成像的值,则其被认为是高分辨率的。窄带采集的基本需要由不同的组织之间的细微差异驱动,其导致可以仅利用关于窄带信号采集的高准确度和功率效率分析的特性窄带反射。该模式例如被用于多普勒成像(连续的和脉冲的)。
中等带宽模式例如用于谐波成像,其中,ADC中心频率在发射频率的谐波处。谐波成像的益处是以下事实:当高频信号被更多衰减时,需要更多增益来采集它们。仅针对这些频率应用增益将需要模拟预滤波以便避免从更强的低频信号削波。模拟滤波通常地要么在面积方面要么在功率方面昂贵。
大带宽模式例如用于B模式或者A模式2D和3D成像。带宽被设置为匹配ADC换能器的带宽。
三个模式可以被看作完全地独立的,但是其可以例如按顺序使用。使用哪个模式将取决于应用或者应用内的测量结果。
例如,在妊娠扫描中,B模式成像可以被用于一般成像,而多普勒成像可以被用于血流(例如,在胎儿心脏中)的特定测量结果。在一个超声前端中实现这两个模式的实施方式提供效率和成本节省。组织表征可以再次是完全地独立的测量,其在组织或者组织边界的更好的表征的身体外或者身体内被使用(例如,在导管上的使用)。
成像流程可以因此包括B模式成像(大带宽较低分辨率采集)的初始使用,其然后跟随有具有较高的分辨率的谐波成像,并且最后利用具有最大准确度的图像采集的测量类型完成(如在使用窄带模式中可实现的)。当来自初始较低分辨率成像模式的数据被用于引导更精细的模式(例如,通过使必须以非常高的准确度成像的体积变窄)时,这是有用的。
有在模式之间切换的各种方式。一个方法用于要顺序地执行的三个模式并且仅需要几个参数以从一个模式传递到另一个。备选地,模式可以交错。例如,在以B模式扫描小体积之后,多普勒或者组织表征被用于更深地评估结果或者向后续B模式采集提供输入。
图11示出了用于控制转换器110的滤波器的通带的控制电路。滤波器的输出被提供到DSP 130,DSP 130控制换能器控制器18。来自换能器控制器18的同步信号被用于控制滤波器。
DSP块130考虑哪些信号已经被用于发射(频率和带宽)和期望的成像模式(其确定哪个频带必须被转换)。在这种情况下,DSP 130需要调谐回路中的模拟带通滤波器,使得其居中于期望的转换带宽中。存在用于如何使用固定已知频率(例如,发射信号的主频率分量)作为参考调谐模拟滤波器响应的已知方法。
不同的模式操作通过引入滤波器系数的可编程性通过设计来实现(附图中所示的积分器的单位增益频率和回路滤波器中的前馈系数和反馈系数的值)。实施可编程性的优选方式将取决于滤波器的设计。在通常优选的有源电阻器-电容器(RC)或者跨导-电容器(Gm-C)滤波器的情况下,系数通过选择用于电阻器、电容器和跨导值的适当值来实现。
例如,对于图12和图13(下面所描述的)的拓扑结构而言,中心频率由积分器和局部反馈路径的单位增益频率确定。
为了将滤波器的中心频率改变到期望的谐波,所有系数应当被缩放。通常,对于固定时钟,所有系数以预计算的相同的缩放因子N缩放。此外,对于每个系数,在硬件中实施至少两个值:标称值和标称值的N倍。对于每个新带宽,N的新值必须被使用并且硬件在实施期间被启用。
如果所有系数以相同因子N缩放,则中心频率改变而不是带宽。为了还调节带宽,传递函数H(s)中的不同的极点以不同的因子缩放。此外,在硬件中预计算并且实现缩放因子。
该缩放可以被用于固定时钟,只要转换的中心频率小于fs/4(fs是采样频率)。该要求被需要以便维持ADC的稳定性。此外,与极点类似,传递函数H(s)的零(在传递函数的分子中)应当以相同的系数缩放。发射频率和其谐波可以因此被用于标称传递函数系数和缩放因子N的校准。
当该可变通带信号数字化被使用在超声成像系统中时,实现高度灵活和能量和面积高效的构建。
转换器可以被使用在具有模拟波束形成的图3的系统中。然而,如果在任何波束形成之前在信号处理链中非常早地执行数字化,则其实现各种新选项。
具体地,方法然后解决以下问题:
(i)几MHz的宽频率范围的模数转换在功率和芯片面积方面非常昂贵。成本还高度地取决于所要求的分辨率,使得宽带高准确度转换器(>13ENOB)通常具有几百mW功耗。在带通配置中,功率要求随着转换带宽的减小而显著地减小。
(ii)带通西格玛德尔塔转换器非常灵活并且采集前端可以利用几个配置位电子地调整,以从非常窄带模式(例如,用于CMUT基础成像的几kHz)到全CMUT带宽操作。甚至在没有CMUT偏置电压的调整的情况下,这可以非常迅速地实现,因此增加重新配置速度并且避免偏置切换伪影。
(iii)带通采集自然地限制数据量,因为仅由特定成像模态需要的频率范围实际上被采集。非期望的噪声带可以利用简单数字滤波器容易地滤波。这进一步简化对于完整系统的要求并且减小其功耗和成本。
与其中使用模拟带通滤波器的经典的模拟带通采集相反,提出的实施方式具有高得多的速度的优点。模拟带通滤波器通常相当慢,因为其需要针对每个连续的信号采集的稳定时间。在带通西格玛德尔塔转换器中,稳定过程在启动时发生,并且在正常操作期间,内置滤波器从稳态模式进行操作并且因此非常迅速地作出反应以输入信号改变。
实施方式还更稳定得多。由于模拟带通滤波器通常并入具有正反馈的共振器或者其他滤波器,因而其非常易于不稳定(尤其是高阶滤波器)。在带通西格玛德尔塔架构中,稳定性经由现有负反馈回路来保证并且滤波器构造可以保证其稳定性。
设计还是更容易地可缩放和可配置。这源于引入的若干额外自由度,诸如时钟速度、DAC和量化器可编程性,其实现通带中心频率和带宽的非常宽的可配置性。
滤波器可以被用于利用电子前端重新配置实现一个频率处的发射和另一个处的检测。
滤波器112可以以各种方式来实施。
图12示出了具有多水平ADC 72和DAC 74的图9的电路的实施方式。可调谐带通滤波器122具有反馈结构,其中,模拟反馈信号通过具有系数fx的第一增益元件120被应用到结构的相加节点。具有系数gx的第二增益元件122在相加节点的反馈路径中。在节点之间存在积分器。
图13示出了再次具有多水平ADC 72和DAC 74的图9的电路的实施方式。可调谐带通滤波器112具有前馈结构,其中,模拟反馈信号仅被供应到结构的第一相加节点。存在具有系数fx的前馈增益元件130,其引导到最后的相加节点。还存在具有系数gx的反馈增益元件132,其引导到结构的相加节点。在节点之间再次存在积分器。
这些是可以被用在转换器内的可能的可编程带通滤波器结构的仅两个已知范例。还可以采用其他滤波器结构。
滤波器通过使架构中的fx和gx系数可编程而是可编程的,如上文所描述的。
通过范例,控制器18与模数转换器110(图11)之间的链路可以是参考频率信号,其被用于对fx和gx系数进行调整,使得滤波器的频率响应被匹配到参考信号。这可以例如通过对系数进行调整直到对参考信号的滤波器响应最大化来完成。
可以存在从控制器18到转换器110的超过一个参考信号。信号可以对于将滤波器切换到预编程的已知状态是静态的,或者其可以用于使滤波器适应于参考信号。参考信号可以是时间变量。最简单地实施方式可以具有在设计处以硬件实施的所有模式。控制器然后可以在模式之间切换并且仅在需要的情况下进行校准。
通过研究附图、说明书和权利要求书,本领域的技术人员在实践所主张的本发明时可以理解和实现所公开的实施例的其他变型。在权利要求中,词语“包括”不排除其他元件或者步骤,并且词语“一”或“一个”不排除多个。尽管在互不相同的从属权利要求中记载了特定措施,但是这并不指示不能有利地使用这些措施的组合。权利要求中的任何附图标记不应当被解释为对范围的限制。
Claims (13)
1.一种超声成像系统探头,包括:
成像换能器头部(10’),其被布置为以发射超声频率发射超声信号;以及
接收电路,其用于处理接收到的反射超声信号,
其中,所述接收电路包括模数西格玛德尔塔转换器(110),所述模数西格玛德尔塔转换器包括闭合回路,所述闭合回路包括具有可编程的中心频率和带宽的能调谐带通滤波器(112),并且
其中,所述能调谐带通滤波器(112)的通带的中心能在第一频率与第二频率之间调谐,所述第一频率对应于所述发射超声频率,所述第二频率对应于所述发射超声频率的期望的谐波。
2.根据权利要求1所述的探头,其中,所述换能器头部(10’)包括换能器元件的阵列,并且其中,所述接收电路包括用于所述换能器头部的每个换能器元件的模数西格玛德尔塔转换器。
3.根据权利要求2所述的探头,其中,所述接收电路包括每个换能器元件与相应的模数西格玛德尔塔转换器之间的放大器(20)。
4.根据任一前述权利要求所述的探头,其中,所述带通滤波器能在低分辨率高带宽模式与高分辨率低带宽模式之间调谐。
5.根据权利要求4所述的探头,其中,所述带通滤波器还能调谐到中等分辨率中等带宽模式。
6.一种超声系统,包括:
根据任一前述权利要求所述的超声成像系统探头 ;
控制器(18),其用于控制所述探头;
波束形成器;以及
信号处理电路,其用于处理来自所述接收电路的信号以生成超声图像。
7.根据权利要求6所述的系统,其中,所述控制器适于与在所述超声系统的不同的接收操作模式之间切换同步地控制所述能调谐带通滤波器。
8.根据权利要求6或7所述的系统,其中,所述接收电路用于处理接收到的反射超声信号,所述接收到的反射超声信号是所述发射超声信号的谐波。
9.一种超声成像方法,包括:
使用成像换能器头部将超声信号提供到要成像的体积中;并且
通过在模数西格玛德尔塔转换器的闭合回路内调谐带通滤波器来处理接收到的反射超声信号,所述带通滤波器具有可编程的中心频率和带宽,
其中,所述方法包括将能调谐带通滤波器的通带的中心设置为发射超声频率或者所述发射超声频率的期望的谐波。
10.根据权利要求9所述的方法,其中,所述换能器头部包括换能器元件的阵列,并且其中,所述方法包括针对所述换能器头部的每个换能器元件个体地执行模数转换。
11.根据权利要求9或10所述的方法,包括与在不同的接收操作模式之间切换同步地调谐所述带通滤波器。
12.根据权利要求11所述的方法,其中,所述模式包括低分辨率高带宽模式和高分辨率低带宽模式。
13.根据权利要求12所述的方法,其中,所述模式还包括中等分辨率中等带宽模式。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15198841 | 2015-12-10 | ||
| EP15198841.7 | 2015-12-10 | ||
| PCT/EP2016/080409 WO2017097968A1 (en) | 2015-12-10 | 2016-12-09 | An ultrasound imaging system probe and system, and an imaging method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108463173A CN108463173A (zh) | 2018-08-28 |
| CN108463173B true CN108463173B (zh) | 2021-09-21 |
Family
ID=54848438
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680078538.1A Active CN108463173B (zh) | 2015-12-10 | 2016-12-09 | 超声成像系统探头和系统以及成像方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11506770B2 (zh) |
| EP (1) | EP3386394B1 (zh) |
| JP (1) | JP6797919B2 (zh) |
| CN (1) | CN108463173B (zh) |
| RU (1) | RU2734129C2 (zh) |
| WO (1) | WO2017097968A1 (zh) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3065214A1 (en) * | 2017-06-20 | 2018-12-27 | Butterfly Network, Inc. | Analog to digital signal conversion in ultrasound device |
| EP3435116A1 (en) | 2017-07-24 | 2019-01-30 | Koninklijke Philips N.V. | An ultrasound probe and processing method |
| TWI743411B (zh) * | 2017-11-08 | 2021-10-21 | 美商富士膠片索諾聲公司 | 具有高頻細節的超音波系統 |
| CN108051501A (zh) * | 2018-01-08 | 2018-05-18 | 飞依诺科技(苏州)有限公司 | 前端接收装置及超声系统 |
| JP7309746B2 (ja) | 2018-03-27 | 2023-07-18 | コーニンクレッカ フィリップス エヌ ヴェ | 複数の空間的に分離されたステージ間でアナログ/デジタル変換を実行するシステム及び方法 |
| US10804942B2 (en) * | 2018-05-24 | 2020-10-13 | Analog Devices, Inc. | State-machine based body scanner imaging system |
| WO2019246010A1 (en) * | 2018-06-19 | 2019-12-26 | Butterfly Network, Inc. | Apparatuses including a capacitive micromachined ultrasonic transducer directly coupled to an analog-to-digital converter |
| US20210169455A1 (en) * | 2019-12-04 | 2021-06-10 | GE Precision Healthcare LLC | System and methods for joint scan parameter selection |
| RU2766424C2 (ru) * | 2020-02-07 | 2022-03-15 | Тимофей Андреевич Семенюк | Антенная система для мобильных устройств радиоподавления |
| RU2757097C2 (ru) * | 2020-02-07 | 2021-10-11 | Тимофей Андреевич Семенюк | Средство для блокирования радиоуправляемых взрывателей |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1169219A (zh) * | 1995-11-21 | 1997-12-31 | 菲利浦电子有限公司 | 用于传输具有特定字长的样本形式且以特定采样速率出现的数字音频信号的数字传输系统 |
| JP2007260394A (ja) * | 2006-03-29 | 2007-10-11 | Medison Co Ltd | 超音波システムでシグマ−デルタアナログ−デジタル変換器を用いた受信集束装置 |
| CN104135912A (zh) * | 2012-02-29 | 2014-11-05 | 通用电气公司 | 用于基于电阻抗测量确定生理参数的系统和方法 |
| CN105122077A (zh) * | 2013-04-09 | 2015-12-02 | 皇家飞利浦有限公司 | 用于生成数字磁共振信息信号的射频天线设备 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4691571A (en) * | 1985-03-04 | 1987-09-08 | Dymax Corporation | Tissue signature tracking transceiver having upconverted IF amplification |
| FR2707815B1 (fr) | 1993-07-13 | 1995-08-25 | Alcatel Mobile Comm France | Convertisseur analogique numérique à boucle de contre-réaction modulée. |
| US8085959B2 (en) * | 1994-07-08 | 2011-12-27 | Brigham Young University | Hearing compensation system incorporating signal processing techniques |
| JP3580627B2 (ja) * | 1996-01-29 | 2004-10-27 | 株式会社東芝 | 超音波診断装置 |
| US6544193B2 (en) * | 1996-09-04 | 2003-04-08 | Marcio Marc Abreu | Noninvasive measurement of chemical substances |
| US6283919B1 (en) | 1996-11-26 | 2001-09-04 | Atl Ultrasound | Ultrasonic diagnostic imaging with blended tissue harmonic signals |
| US6458083B1 (en) | 1996-11-26 | 2002-10-01 | Koninklijke Philips Electronics N.V. | Ultrasonic harmonic imaging with adaptive image formation |
| US6107910A (en) * | 1996-11-29 | 2000-08-22 | X-Cyte, Inc. | Dual mode transmitter/receiver and decoder for RF transponder tags |
| US6218972B1 (en) | 1997-09-11 | 2001-04-17 | Rockwell Science Center, Inc. | Tunable bandpass sigma-delta digital receiver |
| US6013032A (en) | 1998-03-13 | 2000-01-11 | Hewlett-Packard Company | Beamforming methods and apparatus for three-dimensional ultrasound imaging using two-dimensional transducer array |
| US5997479A (en) | 1998-05-28 | 1999-12-07 | Hewlett-Packard Company | Phased array acoustic systems with intra-group processors |
| US6419632B1 (en) * | 1999-03-30 | 2002-07-16 | Kabushiki Kaisha Toshiba | High resolution flow imaging for ultrasound diagnosis |
| US6530885B1 (en) | 2000-03-17 | 2003-03-11 | Atl Ultrasound, Inc. | Spatially compounded three dimensional ultrasonic images |
| US6443896B1 (en) * | 2000-08-17 | 2002-09-03 | Koninklijke Philips Electronics N.V. | Method for creating multiplanar ultrasonic images of a three dimensional object |
| US6468216B1 (en) * | 2000-08-24 | 2002-10-22 | Kininklijke Philips Electronics N.V. | Ultrasonic diagnostic imaging of the coronary arteries |
| US6693573B1 (en) | 2003-03-19 | 2004-02-17 | Raytheon Company | Mixed technology MEMS/BiCMOS LC bandpass sigma-delta for direct RF sampling |
| JP4087762B2 (ja) * | 2003-07-24 | 2008-05-21 | アロカ株式会社 | 超音波診断装置 |
| US6937176B2 (en) * | 2003-09-30 | 2005-08-30 | Koninklijke Philips Electronics, N.V. | Ultrasonic signal acquisition in the digital beamformer |
| US20050251041A1 (en) | 2004-05-07 | 2005-11-10 | Moehring Mark A | Doppler ultrasound processing system and method for concurrent acquisition of ultrasound signals at multiple carrier frequencies, embolus characterization system and method, and ultrasound transducer |
| DE102005003630A1 (de) | 2005-01-26 | 2006-07-27 | Robert Bosch Gmbh | Delta-Sigma-Modulator |
| US8355776B2 (en) * | 2005-05-27 | 2013-01-15 | Board Of Regents, The University Of Texas System | Hemoglobin contrast in magneto-motive optical doppler tomography, optical coherence tomography, and ultrasound imaging methods and apparatus |
| JP4728756B2 (ja) * | 2005-09-22 | 2011-07-20 | 株式会社東芝 | 超音波診断装置 |
| EP3249423B1 (en) * | 2006-03-24 | 2024-05-22 | FUJIFILM Healthcare Corporation | Ultrasound imaging device |
| US8220334B2 (en) * | 2006-11-10 | 2012-07-17 | Penrith Corporation | Transducer array imaging system |
| US20090082673A1 (en) * | 2007-09-26 | 2009-03-26 | Xuanming Lu | Semiconductor matching layer in a layered ultrasound transducer array |
| JP5538822B2 (ja) * | 2009-11-06 | 2014-07-02 | キヤノン株式会社 | 超音波検出装置及び超音波診断装置 |
| US9289191B2 (en) * | 2011-10-12 | 2016-03-22 | Seno Medical Instruments, Inc. | System and method for acquiring optoacoustic data and producing parametric maps thereof |
| US9814394B2 (en) * | 2011-11-02 | 2017-11-14 | Seno Medical Instruments, Inc. | Noise suppression in an optoacoustic system |
| US20130116538A1 (en) * | 2011-11-02 | 2013-05-09 | Seno Medical Instruments, Inc. | Optoacoustic imaging systems and methods with enhanced safety |
| US9445786B2 (en) * | 2011-11-02 | 2016-09-20 | Seno Medical Instruments, Inc. | Interframe energy normalization in an optoacoustic imaging system |
| WO2015028945A2 (en) | 2013-08-27 | 2015-03-05 | Koninklijke Philips N.V. | Variable frequency control of collapsed mode cmut transducer |
| US20180070830A1 (en) * | 2015-04-09 | 2018-03-15 | The General Hospital Corporation | Systems and methods for time-resolved diffuse correlation spectroscopy |
-
2016
- 2016-12-09 RU RU2018124990A patent/RU2734129C2/ru active
- 2016-12-09 US US15/780,250 patent/US11506770B2/en active Active
- 2016-12-09 CN CN201680078538.1A patent/CN108463173B/zh active Active
- 2016-12-09 WO PCT/EP2016/080409 patent/WO2017097968A1/en active Application Filing
- 2016-12-09 EP EP16812714.0A patent/EP3386394B1/en active Active
- 2016-12-09 JP JP2018529996A patent/JP6797919B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1169219A (zh) * | 1995-11-21 | 1997-12-31 | 菲利浦电子有限公司 | 用于传输具有特定字长的样本形式且以特定采样速率出现的数字音频信号的数字传输系统 |
| JP2007260394A (ja) * | 2006-03-29 | 2007-10-11 | Medison Co Ltd | 超音波システムでシグマ−デルタアナログ−デジタル変換器を用いた受信集束装置 |
| CN104135912A (zh) * | 2012-02-29 | 2014-11-05 | 通用电气公司 | 用于基于电阻抗测量确定生理参数的系统和方法 |
| CN105122077A (zh) * | 2013-04-09 | 2015-12-02 | 皇家飞利浦有限公司 | 用于生成数字磁共振信息信号的射频天线设备 |
Non-Patent Citations (1)
| Title |
|---|
| A 1.8 V CMOS fourth-order Gm-C bandpass sigma-delta modulator dedicated to front-end ultrasonic receivers;Lisheng Qin 等;《ANALOG INTEGRATED CIRCUITS AND SIGNAL PROCESSING》;20060509;第48卷(第2期);第121-132页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3386394A1 (en) | 2018-10-17 |
| JP2018536498A (ja) | 2018-12-13 |
| CN108463173A (zh) | 2018-08-28 |
| RU2734129C2 (ru) | 2020-10-13 |
| US20180348349A1 (en) | 2018-12-06 |
| RU2018124990A3 (zh) | 2020-04-24 |
| RU2018124990A (ru) | 2020-01-10 |
| EP3386394B1 (en) | 2024-07-10 |
| JP6797919B2 (ja) | 2020-12-09 |
| WO2017097968A1 (en) | 2017-06-15 |
| US11506770B2 (en) | 2022-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108463173B (zh) | 超声成像系统探头和系统以及成像方法 | |
| JP5575907B2 (ja) | 超音波プローブ及び超音波診断装置 | |
| EP3132281B1 (en) | Ultrasonic imaging compression methods and apparatus | |
| EP3248027B1 (en) | Systems and methods for beamforming using variable sampling | |
| JP2006061693A (ja) | 2dマトリクスアレイを用いてcwドップラー超音波を実施する方法およびその装置 | |
| JPH0614928A (ja) | ビーム形成装置 | |
| KR20160030753A (ko) | 송신 빔포밍 장치, 수신 빔포밍 장치, 이들을 포함하는 초음파 프로브 및 빔포밍 방법 | |
| JP4825625B2 (ja) | 超音波診断装置 | |
| WO2000010638A2 (en) | An asynchronous oversampling beamformer | |
| JP4728756B2 (ja) | 超音波診断装置 | |
| Wagner et al. | Compressed beamforming applied to B-mode ultrasound imaging | |
| WO2004082461A2 (en) | Increased sensitivity for 4-d doppler ultrasound imaging | |
| US20240045044A1 (en) | Digitizing asic for an ultrasound scanning unit | |
| JP6838174B2 (ja) | 超音波プローブと処理方法 | |
| Daft et al. | 5F-3 A Matrix Transducer Design with Improved Image Quality and Acquisition Rate | |
| Tomov et al. | A Delta-Sigma beamformer with integrated apodization | |
| JP2011250946A (ja) | 超音波診断装置 | |
| JP2008161262A (ja) | 超音波診断装置 | |
| LIE et al. | Optimizing the cost to quality ratio in ultrasonic imaging | |
| KR20230152117A (ko) | 윈도잉된 비선형 주파수 변조 처프를 이용한 음향 이미징 및 측정 | |
| Cheong et al. | Multi-bit sigma-delta beamformer with minimal dynamic focusing artifacts | |
| Gao | Efficient digital beamforming for medical ultrasound imaging |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |