CN107438404B - 具有定位能力的机电药丸设备 - Google Patents
具有定位能力的机电药丸设备 Download PDFInfo
- Publication number
- CN107438404B CN107438404B CN201580063563.8A CN201580063563A CN107438404B CN 107438404 B CN107438404 B CN 107438404B CN 201580063563 A CN201580063563 A CN 201580063563A CN 107438404 B CN107438404 B CN 107438404B
- Authority
- CN
- China
- Prior art keywords
- ingestible device
- radial
- reflectance
- data set
- axial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000006187 pill Substances 0.000 title description 5
- 238000005286 illumination Methods 0.000 claims abstract description 241
- 210000001035 gastrointestinal tract Anatomy 0.000 claims abstract description 143
- 230000003287 optical effect Effects 0.000 claims abstract description 56
- 230000007704 transition Effects 0.000 claims description 120
- 210000002784 stomach Anatomy 0.000 claims description 103
- 238000012545 processing Methods 0.000 claims description 96
- 210000001198 duodenum Anatomy 0.000 claims description 37
- 238000005070 sampling Methods 0.000 claims description 34
- 238000001228 spectrum Methods 0.000 claims description 34
- 230000008859 change Effects 0.000 claims description 33
- 210000001630 jejunum Anatomy 0.000 claims description 28
- 210000004534 cecum Anatomy 0.000 claims description 25
- 238000002329 infrared spectrum Methods 0.000 claims description 12
- 210000003405 ileum Anatomy 0.000 claims description 9
- 210000003041 ligament Anatomy 0.000 claims description 7
- 238000000034 method Methods 0.000 abstract description 141
- 239000002245 particle Substances 0.000 abstract description 30
- 239000003814 drug Substances 0.000 abstract description 19
- 239000012530 fluid Substances 0.000 abstract description 8
- 210000000056 organ Anatomy 0.000 abstract description 8
- 238000002310 reflectometry Methods 0.000 description 146
- 210000000813 small intestine Anatomy 0.000 description 95
- 238000004422 calculation algorithm Methods 0.000 description 80
- 238000004891 communication Methods 0.000 description 80
- 238000001514 detection method Methods 0.000 description 50
- 210000002429 large intestine Anatomy 0.000 description 46
- 230000015654 memory Effects 0.000 description 45
- 230000008569 process Effects 0.000 description 41
- 239000000463 material Substances 0.000 description 39
- 239000000126 substance Substances 0.000 description 38
- 238000003860 storage Methods 0.000 description 36
- 238000010586 diagram Methods 0.000 description 31
- 238000012384 transportation and delivery Methods 0.000 description 28
- MTLMVEWEYZFYTH-UHFFFAOYSA-N 1,3,5-trichloro-2-phenylbenzene Chemical compound ClC1=CC(Cl)=CC(Cl)=C1C1=CC=CC=C1 MTLMVEWEYZFYTH-UHFFFAOYSA-N 0.000 description 27
- 230000002093 peripheral effect Effects 0.000 description 25
- 230000004044 response Effects 0.000 description 25
- 210000001519 tissue Anatomy 0.000 description 24
- 230000006870 function Effects 0.000 description 22
- 238000001727 in vivo Methods 0.000 description 18
- 230000033001 locomotion Effects 0.000 description 18
- 238000011022 operating instruction Methods 0.000 description 16
- NDVLTYZPCACLMA-UHFFFAOYSA-N silver oxide Chemical compound [O-2].[Ag+].[Ag+] NDVLTYZPCACLMA-UHFFFAOYSA-N 0.000 description 16
- 238000001579 optical reflectometry Methods 0.000 description 15
- 230000002183 duodenal effect Effects 0.000 description 14
- 238000004519 manufacturing process Methods 0.000 description 13
- 230000002496 gastric effect Effects 0.000 description 12
- 238000012360 testing method Methods 0.000 description 12
- 230000007423 decrease Effects 0.000 description 11
- 238000013461 design Methods 0.000 description 11
- 239000007788 liquid Substances 0.000 description 11
- 230000000694 effects Effects 0.000 description 9
- 229910001923 silver oxide Inorganic materials 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 8
- 230000004807 localization Effects 0.000 description 8
- 238000010521 absorption reaction Methods 0.000 description 7
- 229920005573 silicon-containing polymer Polymers 0.000 description 7
- 230000036760 body temperature Effects 0.000 description 6
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 6
- 239000010410 layer Substances 0.000 description 6
- 230000000670 limiting effect Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 239000008177 pharmaceutical agent Substances 0.000 description 6
- 239000000853 adhesive Substances 0.000 description 5
- 230000001070 adhesive effect Effects 0.000 description 5
- 238000003556 assay Methods 0.000 description 5
- 238000009529 body temperature measurement Methods 0.000 description 5
- 235000013305 food Nutrition 0.000 description 5
- 210000001187 pylorus Anatomy 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 229940124597 therapeutic agent Drugs 0.000 description 5
- 238000011282 treatment Methods 0.000 description 5
- 238000001429 visible spectrum Methods 0.000 description 5
- 230000006399 behavior Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- -1 but not limited to Substances 0.000 description 4
- 239000002775 capsule Substances 0.000 description 4
- 210000001072 colon Anatomy 0.000 description 4
- 201000010099 disease Diseases 0.000 description 4
- 238000001914 filtration Methods 0.000 description 4
- 239000006260 foam Substances 0.000 description 4
- 230000003993 interaction Effects 0.000 description 4
- 210000004347 intestinal mucosa Anatomy 0.000 description 4
- 230000037361 pathway Effects 0.000 description 4
- 239000002861 polymer material Substances 0.000 description 4
- 239000003826 tablet Substances 0.000 description 4
- 241000252983 Caecum Species 0.000 description 3
- 229920001651 Cyanoacrylate Polymers 0.000 description 3
- MWCLLHOVUTZFKS-UHFFFAOYSA-N Methyl cyanoacrylate Chemical compound COC(=O)C(=C)C#N MWCLLHOVUTZFKS-UHFFFAOYSA-N 0.000 description 3
- 108010001267 Protein Subunits Proteins 0.000 description 3
- 238000012952 Resampling Methods 0.000 description 3
- 238000000692 Student's t-test Methods 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 3
- 238000002835 absorbance Methods 0.000 description 3
- 230000003213 activating effect Effects 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 3
- 239000003990 capacitor Substances 0.000 description 3
- 210000003608 fece Anatomy 0.000 description 3
- 230000005055 memory storage Effects 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 210000000214 mouth Anatomy 0.000 description 3
- 210000004872 soft tissue Anatomy 0.000 description 3
- 238000012353 t test Methods 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 230000005355 Hall effect Effects 0.000 description 2
- VEXZGXHMUGYJMC-UHFFFAOYSA-N Hydrochloric acid Chemical compound Cl VEXZGXHMUGYJMC-UHFFFAOYSA-N 0.000 description 2
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 2
- 239000012491 analyte Substances 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 2
- 230000001580 bacterial effect Effects 0.000 description 2
- 239000000560 biocompatible material Substances 0.000 description 2
- 239000003124 biologic agent Substances 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 229910052799 carbon Inorganic materials 0.000 description 2
- 239000003153 chemical reaction reagent Substances 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 235000020965 cold beverage Nutrition 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000011960 computer-aided design Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 239000004205 dimethyl polysiloxane Substances 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 208000035475 disorder Diseases 0.000 description 2
- 230000037406 food intake Effects 0.000 description 2
- 230000030136 gastric emptying Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000003100 immobilizing effect Effects 0.000 description 2
- 230000000977 initiatory effect Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 230000000968 intestinal effect Effects 0.000 description 2
- 229910052744 lithium Inorganic materials 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 239000000178 monomer Substances 0.000 description 2
- 210000003097 mucus Anatomy 0.000 description 2
- OTCVAHKKMMUFAY-UHFFFAOYSA-N oxosilver Chemical compound [Ag]=O OTCVAHKKMMUFAY-UHFFFAOYSA-N 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229920000435 poly(dimethylsiloxane) Polymers 0.000 description 2
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 2
- 239000004417 polycarbonate Substances 0.000 description 2
- 229920000515 polycarbonate Polymers 0.000 description 2
- 229920000573 polyethylene Polymers 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 239000004926 polymethyl methacrylate Substances 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 239000000843 powder Substances 0.000 description 2
- 210000000664 rectum Anatomy 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 238000007514 turning Methods 0.000 description 2
- RVCKCEDKBVEEHL-UHFFFAOYSA-N 2,3,4,5,6-pentachlorobenzyl alcohol Chemical compound OCC1=C(Cl)C(Cl)=C(Cl)C(Cl)=C1Cl RVCKCEDKBVEEHL-UHFFFAOYSA-N 0.000 description 1
- ZCJJIQHVZCFSGZ-UHFFFAOYSA-N 2,8-bis(diphenylphosphoryl)dibenzothiophene Chemical compound C=1C=CC=CC=1P(C=1C=C2C3=CC(=CC=C3SC2=CC=1)P(=O)(C=1C=CC=CC=1)C=1C=CC=CC=1)(=O)C1=CC=CC=C1 ZCJJIQHVZCFSGZ-UHFFFAOYSA-N 0.000 description 1
- 238000010146 3D printing Methods 0.000 description 1
- 238000012935 Averaging Methods 0.000 description 1
- 208000015943 Coeliac disease Diseases 0.000 description 1
- 206010010774 Constipation Diseases 0.000 description 1
- 208000011231 Crohn disease Diseases 0.000 description 1
- 208000002699 Digestive System Neoplasms Diseases 0.000 description 1
- 206010021518 Impaired gastric emptying Diseases 0.000 description 1
- 206010061218 Inflammation Diseases 0.000 description 1
- 239000004944 Liquid Silicone Rubber Substances 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 208000012868 Overgrowth Diseases 0.000 description 1
- 208000032366 Oversensing Diseases 0.000 description 1
- 229920012266 Poly(ether sulfone) PES Polymers 0.000 description 1
- 241000550081 Renata Species 0.000 description 1
- YZSKZXUDGLALTQ-UHFFFAOYSA-N [Li][C] Chemical compound [Li][C] YZSKZXUDGLALTQ-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000001994 activation Methods 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 210000000436 anus Anatomy 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 210000001142 back Anatomy 0.000 description 1
- 210000000941 bile Anatomy 0.000 description 1
- 238000012742 biochemical analysis Methods 0.000 description 1
- 230000004071 biological effect Effects 0.000 description 1
- 239000000090 biomarker Substances 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 239000005388 borosilicate glass Substances 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000001311 chemical methods and process Methods 0.000 description 1
- 235000021270 cold food Nutrition 0.000 description 1
- 206010009887 colitis Diseases 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000012864 cross contamination Methods 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000035622 drinking Effects 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002255 enzymatic effect Effects 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 239000011152 fibreglass Substances 0.000 description 1
- 229920002457 flexible plastic Polymers 0.000 description 1
- 239000004811 fluoropolymer Substances 0.000 description 1
- 229920002313 fluoropolymer Polymers 0.000 description 1
- 210000004051 gastric juice Anatomy 0.000 description 1
- 210000001156 gastric mucosa Anatomy 0.000 description 1
- 210000003736 gastrointestinal content Anatomy 0.000 description 1
- 208000001288 gastroparesis Diseases 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000000383 hazardous chemical Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000002209 hydrophobic effect Effects 0.000 description 1
- 210000003692 ilium Anatomy 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000004054 inflammatory process Effects 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000031700 light absorption Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 235000012054 meals Nutrition 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000004060 metabolic process Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004899 motility Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000004118 muscle contraction Effects 0.000 description 1
- 235000015097 nutrients Nutrition 0.000 description 1
- 210000004789 organ system Anatomy 0.000 description 1
- 230000001575 pathological effect Effects 0.000 description 1
- 230000002572 peristaltic effect Effects 0.000 description 1
- 210000003800 pharynx Anatomy 0.000 description 1
- 108091008695 photoreceptors Proteins 0.000 description 1
- 230000001766 physiological effect Effects 0.000 description 1
- 238000000678 plasma activation Methods 0.000 description 1
- 229920000058 polyacrylate Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 239000004800 polyvinyl chloride Substances 0.000 description 1
- 238000013105 post hoc analysis Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000011241 protective layer Substances 0.000 description 1
- 108090000623 proteins and genes Proteins 0.000 description 1
- 102000004169 proteins and genes Human genes 0.000 description 1
- 230000007420 reactivation Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 210000002460 smooth muscle Anatomy 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 210000005070 sphincter Anatomy 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000003351 stiffener Substances 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000001839 systemic circulation Effects 0.000 description 1
- 229920001169 thermoplastic Polymers 0.000 description 1
- 239000004416 thermosoftening plastic Substances 0.000 description 1
- 231100000331 toxic Toxicity 0.000 description 1
- 230000002588 toxic effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 238000002211 ultraviolet spectrum Methods 0.000 description 1
- 230000002618 waking effect Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images























































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/0017—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system transmitting optical signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/002—Monitoring the patient using a local or closed circuit, e.g. in a room or building
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
- A61B5/0086—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters using infrared radiation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/07—Endoradiosondes
- A61B5/073—Intestinal transmitters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6861—Capsules, e.g. for swallowing or implanting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7264—Classification of physiological signals or data, e.g. using neural networks, statistical classifiers, expert systems or fuzzy systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/11—Arrangements specific to free-space transmission, i.e. transmission through air or vacuum
- H04B10/114—Indoor or close-range type systems
- H04B10/1143—Bidirectional transmission
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B13/00—Transmission systems characterised by the medium used for transmission, not provided for in groups H04B3/00 - H04B11/00
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/0045—Devices for taking samples of body liquids
- A61B2010/0061—Alimentary tract secretions, e.g. biliary, gastric, intestinal, pancreatic secretions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/04—Constructional details of apparatus
- A61B2560/0443—Modular apparatus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/04—Constructional details of apparatus
- A61B2560/0462—Apparatus with built-in sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/16—Details of sensor housings or probes; Details of structural supports for sensors
- A61B2562/162—Capsule shaped sensor housings, e.g. for swallowing or implantation
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/20—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for computer-aided diagnosis, e.g. based on medical expert systems
Abstract
本发明说明了用于识别出可摄取设备在身体的胃肠道内的位置的设备、系统和方法的各种实施例。在某些实施例中,可摄取设备包括感测单元,所述感测单元具有位于设备的至少一个端部近侧的轴向光学感测分单元和位于设备的径向壁近侧的径向光学感测分单元,并且可摄取设备可以独立自主地识别出在胃肠道内的位置。在某些实施例中,可摄取设备包括光学照明源和检测器,所述检测器以多个不同的波长操作,并且可摄取设备可以通过使用器官组织和偶尔的微粒的反射特性而辨别出胃肠道的区域。在某些实施例中,可摄取设备可以基于所检测的设备位置对流体取样或释放药剂。
Description
背景技术
胃肠(GI)道通常包含有关于个人的身体的丰富的信息。例如,在GI道中的内容可以提供关于个人的新陈代谢的信息。对GI道的内容的分析还可以提供用于识别出GI内容组成(例如,细菌内容与生物化学内容之间的关系)与某些疾病或失调之间的关系的信息。
用于分析GI道的现在的方法和设备在某些方面中受到限制,例如,从GI道检索的数据的准确度。从GI道检索的数据可以包括实体样本和/或测量值。所检索的数据的值在一定程度上可以取决于如何可以准确地识别出检索数据的位置。然而,GI道内的体内位置检测会是困难的。GI道内的不同的分段有时可以包括某些物质(例如,血液),其可以影响体内位置检测,并且还可以在不同的个体之中在GI道中有差异。
发明内容
在某些方面中,本文提供一种可摄取设备,其用于识别出身体的胃肠(GI)道内的位置。可摄取设备包括外壳,所述外壳由第一端部、第二端部和径向壁限定,所述第二端部与第一端部基本相对,所述径向壁从第一端部纵向地延伸到第二端部;在外壳内的感测单元,所述感测单元包括:位于第一端部和第二端部中的至少一个近侧的轴向光学感测分单元,所述轴向光学感测分单元配置成朝向在外壳外部的环境传输轴向照明并且从环境检测由轴向照明所引起的轴向反射率;和位于径向壁近侧的径向光学感测分单元,所述径向光学感测分单元配置成朝向在外壳外部的环境传输径向照明并且从环境检测由径向照明所引起的径向反射率,径向照明与轴向照明基本垂直;其中,处理模块配置成基于至少所检测的径向和轴向反射率识别出可摄取设备的位置。
在至少某些实施例中,处理模块可以是外部处理模块,并且该设备还可以包括通信模块,所述通信模块配置成将与所检测的径向反射率相对应的一个或多个径向反射率值和与所检测的轴向反射率相对应的一个或多个轴向反射率值传输到外部处理模块。
在至少某些实施例中,该设备可以包括处理模块。
在至少某些实施例中,轴向光学感测分单元可以包括至少一个轴向传感器,所述至少一个轴向传感器具有轴向照明器和轴向检测器,所述轴向照明器配置成传输轴向照明,所述轴向检测器配置成检测轴向反射率。
在至少某些实施例中,径向光学感测分单元可以包括至少一个径向传感器,所述至少一个径向传感器具有径向照明器和径向检测器,所述径向照明器配置成传输径向照明,所述径向检测器配置成检测径向反射率。
在至少某些实施例中,径向光学感测分单元可以包括三个径向传感器,给定的径向传感器的径向照明器和径向检测器布置成沿着径向壁的圆周彼此成约60度。
在至少某些实施例中,径向光学感测分单元还包括四个径向传感器,每个径向传感器都被定位成沿着径向壁的圆周彼此基本等距。
在至少某些实施例中,轴向光学感测分单元可以包括第一轴向传感器,所述第一轴向传感器位于可摄取设备的第一端部近侧,第一轴向传感器配置成朝向环境传输第一轴向照明并且从环境检测由第一轴向照明所引起的第一轴向反射率;和第二轴向传感器,所述第二轴向传感器位于可摄取设备的第二端部近侧,第二轴向传感器配置成朝向环境传输第二轴向照明并且从环境检测由第二轴向照明所引起的第二轴向反射率,第二轴向照明是沿着与第一轴向照明基本相反的方向。
在至少某些实施例中,径向光学感测分单元可以包括第一径向传感器,所述第一径向传感器位于径向壁的第一壁部分近侧,第一径向传感器配置成朝向环境传输第一径向照明并且从环境检测由第一径向照明所引起的第一径向反射率;和第二径向传感器,所述第二径向传感器位于径向壁的第二壁部分近侧,第二径向传感器配置成朝向环境传输第二径向照明并且从环境检测由第二径向照明所引起的第二径向反射率,第二壁部分沿着径向壁的圆周与第一壁部分间隔开至少60度,并且第二径向照明是沿着与第一径向照明不同的径向方向。
在至少某些实施例中,第一壁部分可以沿着径向壁的圆周与第二壁部分间隔开约180度。
在至少某些实施例中,径向光学感测分单元还可以包括第三径向传感器,所述第三径向传感器位于径向壁的第三壁部分近侧,第三径向传感器配置成朝向环境传输第三径向照明并且从环境检测由第三径向照明所引起的第三径向反射率,第三壁部分沿着径向壁的圆周与第一壁部分和第二壁部分中的每个都间隔开约60度,并且第三径向照明是沿着与第一径向照明和第二径向照明不同的另一个径向方向。
在至少某些实施例中,轴向光学感测分单元可以包括红外发光二极管(LED)。
在至少某些实施例中,径向光学感测分单元可以包括LED发射光,所述LED发射光具有约571nm的波长。
在至少某些实施例中,径向光学感测分单元可以包括RGB LED包。
在至少某些实施例中,外壳是胶囊状的。
在某些方面中,本文提供一种用于识别出身体的GI道内的位置的方法。该方法包括:使用一种可摄取设备,所述可摄取设备包括:外壳,所述外壳具有第一端部、第二端部和径向壁,所述第二端部与第一端部基本相对,所述径向壁从第一端部纵向地延伸到第二端部;和在外壳内的感测单元,所述感测单元包括:位于第一端部和第二端部中的至少一个近侧的轴向光学感测分单元,所述轴向光学感测分单元配置成朝向在外壳外部的环境传输轴向照明并且从环境检测由轴向照明所引起的轴向反射率;和位于径向壁近侧的径向光学感测分单元,所述径向光学感测分单元配置成朝向在外壳外部的环境传输径向照明并且从环境检测由径向照明所引起的径向反射率,径向照明与轴向照明基本垂直;以及,操作处理模块以基于至少所检测的径向和轴向反射率识别出所述位置。
可摄取设备还可以根据本文的教导中的任一个限定。
在某些方面中,本文提供一种用于识别出身体的GI道内的位置的系统。该系统包括:可摄取设备,所述可摄取设备包括:外壳,所述外壳具有第一端部、第二端部和径向壁,所述第二端部与第一端部基本相对,所述径向壁从第一端部纵向地延伸到第二端部;和在外壳内的感测单元,感测单元包括:位于第一端部和第二端部中的至少一个近侧的轴向光学感测分单元,所述轴向光学感测分单元配置成朝向在外壳外部的环境传输轴向照明并且从环境检测由轴向照明所引起的轴向反射率;和位于径向壁近侧的径向光学感测分单元,所述径向光学感测分单元配置成朝向在外壳外部的环境传输径向照明并且从环境检测由径向照明所引起的径向反射率,径向照明与轴向照明基本垂直;和处理模块,所述处理模块配置成基于至少在身体内运送期间所检测的径向和轴向反射率识别出可摄取设备的位置。
可摄取设备还可以根据本文的教导中的任一个限定。
在某些方面中,本文提供另一种用于识别出身体的GI道内的位置的方法。该方法包括:提供一种可摄取设备,所述可摄取设备具有感测单元以采集反射率数据,所述感测单元包括:轴向光学感测分单元,所述轴向光学感测分单元可操作成朝向在可摄取设备外部的环境传输轴向照明并且从环境检测由轴向照明所引起的轴向反射率;和径向光学感测分单元,所述径向光学感测分单元可操作成朝向在可摄取设备外部的环境传输径向照明并且从环境检测由径向照明所引起的径向反射率,径向照明与轴向照明基本垂直;操作感测单元以随着可摄取设备通过身体运送而至少采集反射率数据系列,所述反射率数据系列包括轴向反射率数据系列和径向反射率数据系列,轴向反射率数据系列和径向反射率数据系列中的每个都包括一个或多个反射率值,所述一个或多个反射率值与在运送的至少部分期间由感测单元所检测的相应的轴向反射率和径向反射率相对应;以及,操作处理模块以使用反射率数据系列识别出所述位置,处理模块与感测单元电子通信,处理模块配置成:基于轴向反射率数据系列和径向反射率数据系列确定在可摄取设备外部的环境的质量;以及,基于所确定的在可摄取设备外部的环境的质量指示所述位置。
在至少某些实施例中,所述基于轴向反射率数据系列和径向反射率数据系列中的每个确定在可摄取设备外部的环境的质量可以包括:产生用于轴向反射率数据系列的轴向标准偏差和用于径向反射率数据系列的径向标准偏差;判定是否轴向标准偏差和径向标准偏差中的每个都满足相对应的偏差阈值;以及,响应于判定轴向标准偏差和径向标准偏差满足偏差阈值,将环境的质量定义为同质的。
在至少某些实施例中,偏差阈值可以包括用于轴向反射率数据系列的轴向偏差阈值和用于径向反射率数据系列的径向偏差阈值,径向偏差阈值具有与轴向偏差阈值不同的值。
在至少某些实施例中,响应于判定轴向标准偏差和径向标准偏差满足偏差阈值并且在将环境的质量定义为同质的之前,该方法还可以包括:从轴向反射率数据系列的部分产生轴向平均值和从径向反射率数据系列的部分产生径向平均值;判定是否径向平均值小于轴向平均值;以及,响应于判定径向平均值小于轴向平均值,将环境的质量定义为同质的。
在至少某些实施例中,所述判定是否径向平均值小于轴向平均值可以包括判定是否径向平均值比轴向平均值小了最小差值。
在至少某些实施例中,所述从轴向反射率数据系列的部分产生轴向平均值和从径向反射率数据系列的部分产生径向平均值可以包括从轴向反射率数据系列和径向反射率数据系列中的每个选出多个反射率值,所述多个反射率值是从相应的轴向反射率数据系列和径向反射率数据系列的最新部分选出。
在至少某些实施例中,感测单元还可以包括温度传感器,所述温度传感器用于随着可摄取设备通过身体运送而采集温度数据系列;并且在将环境的质量关联为同质的之前,该方法还可以包括:所述判定是否温度数据系列的部分包括超过温度阈值的温度变化;以及,响应于判定温度数据系列的部分不包括超过温度阈值的温度变化,将环境的质量关联为同质的。
在至少某些实施例中,处理模块可以被操作成响应于判定在可摄取设备外部的环境的质量是同质的而指示所述位置是小肠。
在某些方面中,本文提供另一种用于识别出身体的GI道内的位置的可摄取设备。可摄取设备可以包括感测单元,所述感测单元配置成采集反射率数据,所述感测单元包括:轴向光学感测分单元,所述轴向光学感测分单元可操作成朝向在可摄取设备外部的环境传输轴向照明并且从环境检测由轴向照明所引起的轴向反射率;和径向光学感测分单元,所述径向光学感测分单元可操作成朝向在可摄取设备外部的环境传输径向照明并且从环境检测由径向照明所引起的径向反射率,径向照明与轴向照明基本垂直;其中,处理模块配置成:操作感测单元以随着可摄取设备通过身体运送而至少采集反射率数据系列,所述反射率数据系列包括轴向反射率数据系列和径向反射率数据系列,轴向反射率数据系列和径向反射率数据系列中的每个都包括一个或多个反射率值,所述一个或多个反射率值与在运送的至少部分期间由感测单元所检测的相应的轴向反射率和径向反射率相对应;基于轴向反射率数据系列和径向反射率数据系列确定在可摄取设备外部的环境的质量;以及,基于所确定的在可摄取设备外部的环境的质量指示所述位置。
处理模块可以配置成执行根据本文的教导的方法中的至少一个。
在至少某些实施例中,处理模块可以是外部处理模块,并且所述设备还可以包括与外部处理模块电子通信的通信模块。
在至少某些实施例中,处理模块可以位于所述设备内。
在某些方面中,本文提供又一种用于识别出身体的GI道内的位置的方法。该方法包括:操作轴向光学感测分单元以朝向GI道内的环境传输轴向照明并且从环境检测由轴向照明所引起的轴向反射率;操作径向光学感测分单元以朝向GI道内的环境传输径向照明并且从环境检测由径向照明所引起的径向反射率,径向照明与轴向照明基本垂直;以及,操作处理模块以使用所检测的轴向反射率和所检测的径向反射率识别出所述位置,处理模块配置成:基于所检测的轴向反射率和所检测的径向反射率确定GI道内的环境的质量;以及,基于所确定的GI道内的环境的质量指示所述位置。
在至少一个实施例中,该方法还可以包括在一时间段上至少采集反射率数据系列,所述反射率数据系列包括轴向反射率数据系列和径向反射率数据系列,轴向反射率数据系列和径向反射率数据系列中的每个都包括一个或多个反射率值,所述一个或多个反射率值与在所述时间段期间由相应的轴向光学感测分单元和径向光学感测分单元所检测的相应的轴向反射率和径向反射率相对应。
在至少一个实施例中,所述基于所检测的轴向反射率和所检测的径向反射率确定GI道内的环境的质量可以包括产生用于轴向反射率数据系列的轴向标准偏差和用于径向反射率数据系列的径向标准偏差;判定是否轴向标准偏差和径向标准偏差中的每个都满足相对应的偏差阈值;以及,响应于判定轴向标准偏差和径向标准偏差满足偏差阈值,将环境的质量定义为同质的。
在至少一个实施例中,偏差阈值可以包括用于轴向反射率数据系列的轴向偏差阈值和用于径向反射率数据系列的径向偏差阈值,径向偏差阈值具有与轴向偏差阈值不同的值。
在至少一个实施例中,该方法还可以包括,响应于判定轴向标准偏差和径向标准偏差满足偏差阈值并且在将环境的质量定义为同质的之前:从轴向反射率数据系列的部分产生轴向平均值和从径向反射率数据系列的部分产生径向平均值;判定是否径向平均值小于轴向平均值;以及,响应于判定径向平均值小于轴向平均值,将环境的质量定义为同质的。
在至少一个实施例中,所述判定是否径向平均值小于轴向平均值可以包括判定是否径向平均值比轴向平均值小了最小差值。
在至少一个实施例中,所述从轴向反射率数据系列的部分产生轴向平均值和从径向反射率数据系列的部分产生径向平均值可以包括从轴向反射率数据系列和径向反射率数据系列中的每个选出多个反射率值,所述多个反射率值是从相应的轴向反射率数据系列和径向反射率数据系列的最新部分选出。
在至少一个实施例中,该方法还可以包括操作温度传感器以采集温度数据系列;以及在将环境的质量关联为同质的之前,该方法还包括所述判定是否温度数据系列的部分包括超过温度阈值的温度变化;以及,响应于判定温度数据系列的部分不包括超过温度阈值的温度变化,将环境的质量关联为同质的。
在至少一个实施例中,处理模块可以被操作成响应于判定在可摄取设备外部的环境的质量是同质的而指示所述GI位置是小肠。
在某些方面中,本文提供一种计算机可读介质,所述计算机可读介质具有多个指令,所述多个指令可在设备的处理模块上执行,用于使该设备适于实施如所述的用于识别出身体的GI道内的位置的方法中的任一个。
在某些方面中,本文提供又一种用于确定可摄取设备在身体的胃肠道内的位置的方法。该方法包括:朝向在可摄取设备的外壳外部的环境以第一波长传输第一照明;从环境检测由第一照明所引起的第一反射率并且将第一反射率值存储在第一数据集中,其中,第一反射率值指示第一反射率中的光量;朝向在可摄取设备的外壳外部的环境以第二波长传输第二照明,其中,第二波长与第一波长不同;从环境检测由第二照明所引起的第二反射率并且将第二反射率值存储在第二数据集中,其中,第二反射率值指示第二反射率中的光量;识别出可摄取设备的状态,其中,所述状态是可摄取设备的已知的或估算的位置;以及,通过检测是否已经发生状态过渡而确定可摄取设备在身体的胃肠道内的位置变化,所述状态过渡通过将第一数据集与第二数据集比较而被检测。
在某些实施例中,将第一数据集与第二数据集比较包括取得存储在第一数据集中的第一反射率值与存储在第二数据集中的第二反射率值之间的差值。
在某些实施例中,将第一数据集与第二数据集比较包括对(i)存储在第一数据集中的反射率值与存储在第二数据集中的反射率值之间的差值或(ii)第一数据集的移动平均线与第二数据集的移动平均线之间的差值中的至少一个求积分。
在某些实施例中,比较第一数据集和第二数据集包括从存储在第一数据集中的反射率值取得第一平均值,从存储在第二数据集中的反射率值取得第二平均值,以及取得第一平均值与第二平均值之间的差值。
在某些实施例中,比较第一数据集和第二数据集包括当第一数据集的平均值减去第一数据集的标准偏差的倍数大于第二数据集的平均值加上第二数据集的标准偏差的倍数时递增一次计数。
在某些实施例中,第一波长处于红色光谱和红外光谱中的至少一个中,并且第二波长处于蓝色光谱和绿色光谱中的至少一个中。
在某些实施例中,所识别出的状态是胃,并且其中,当所述比较指示第一数据集和第二数据集已经以统计上显著的方式发散时,已经发生状态过渡,其中,所述状态过渡是幽门过渡。
在某些实施例中,所识别出的状态是十二指肠,并且其中,当所述比较指示第一数据集与第二数据集之间的差值以统计上显著的方式恒定时,已经发生状态过渡,其中,所述状态过渡是屈氏韧带过渡。
在某些实施例中,第一波长处于红外光谱中,并且第二波长处于绿色光谱和蓝色光谱中的至少一个中。
在某些实施例中,所识别出的状态是空肠,并且其中,当所述比较指示第一数据集和第二数据集已经以统计上显著的方式收敛时,已经发生状态过渡,其中,所述状态过渡是回盲肠过渡。
在某些实施例中,第一波长处于红色光谱中,并且第二波长处于绿色光谱和蓝色光谱中的至少一个中。
在某些实施例中,所识别出的状态是盲肠,并且其中,当所述比较指示第一数据集和第二数据集已经以统计上显著的方式收敛时,已经发生状态过渡,其中,所述状态过渡是盲肠过渡。
在某些实施例中,该方法还包括测量在可摄取设备的外壳外部的环境的温度变化。
在某些实施例中,所识别出的状态是在身体外部,并且其中,所测量的温度变化高于阈值,已经发生状态过渡,其中,所述状态过渡是正进入胃。
在某些实施例中,所识别出的状态是大肠,并且其中,所测量的温度变化高于阈值,已经发生状态过渡,其中,所述状态过渡是正离开身体。
在某些实施例中,该方法还包括:在检测是否已经发生状态过渡之后使可摄取设备的功能停用预定的时间段;在所述预定的时间段之后重新启用可摄取设备的功能;朝向在可摄取设备的外壳外部的环境以第一波长传输第三照明;从环境检测由第三照明所引起的第三反射率并且将第三反射率值存储在第一数据集中,其中,第三反射率值指示由可摄取设备从第三反射率检测的光量;朝向在可摄取设备的外壳外部的环境以第二波长传输第四照明;从环境检测由第四照明所引起的第四反射率并且将第四反射率值存储在第二数据集中,其中,第四反射率值指示由可摄取设备从第四反射率检测的光量;识别出可摄取设备的状态;以及,通过检测是否已经发生状态过渡而确定可摄取设备在身体的胃肠道内的位置变化,所述状态过渡通过将第一数据集与第二数据集比较而被检测。
在某些实施例中,可摄取设备的状态从以下各项中的一个选出:在身体外部;胃;幽门;小肠;十二指肠;空肠;回肠;大肠;盲肠;以及结肠。
在某些实施例中,状态过渡从以下各项中的一个选出:进入身体;进入胃;幽门过渡;屈氏韧带过渡;回盲肠过渡;盲肠过渡;以及离开身体。
在某些方面中,本文提供又一种可摄取设备,所述可摄取设备包括外壳,所述外壳由第一端部、第二端部和径向壁限定,所述第二端部与第一端部相对,所述径向壁从第一端部纵向地延伸到第二端部;在外壳内的感测单元,感测单元包括:第一光学感测分单元,其配置成朝向在外壳外部的环境以第一波长传输第一照明并且从环境检测由第一照明所引起的第一反射率;第二光学感测分单元,其配置成朝向在外壳外部的环境以第二波长传输第二照明,其中,第二波长与第一波长不同,并且从环境检测由第二照明所引起的第二反射率;和位于可摄取设备内的处理模块,所述处理模块配置成:将第一反射率值存储在第一数据集中,其中,第一反射率值指示由该设备从第一反射率检测的光量;将第二反射率值存储在第二数据集中,其中,第二反射率值指示由该设备从第二反射率检测的光量;识别出该设备的状态,其中,所述状态是可摄取设备的已知的或估算的位置;以及,通过检测是否已经发生状态过渡而确定可摄取设备在身体的胃肠道内的位置变化,所述状态过渡通过将第一数据集与第二数据集比较而被检测。
在某些实施例中,可摄取设备还可以根据本文的教导中的任一个限定。
在某些实施例中,本文提供另一种用于确定可摄取设备在身体的胃肠道内的位置的系统。该系统包括用于朝向在可摄取设备的外壳外部的环境以第一波长传输第一照明的装置;用于从环境检测由第一照明所引起的第一反射率的装置,和用于将第一反射率值存储在第一数据集中的装置,其中,第一反射率值指示第一反射率中的光量;用于朝向在可摄取设备的外壳外部的环境以第二波长传输第二照明的装置,其中,第二波长与第一波长不同;用于从环境检测由第二照明所引起的第二反射率的装置,和用于将第二反射率值存储在第二数据集中的装置,其中,第二反射率值指示第二反射率中的光量;用于识别出可摄取设备的状态的装置,其中,所述状态是可摄取设备的已知的或估算的位置;和用于通过检测是否已经发生状态过渡而确定可摄取设备在身体的胃肠道内的位置变化的装置,所述状态过渡通过将第一数据集与第二数据集比较而被检测。
在某些实施例中,该系统还可以根据本文的教导中的任一个限定。
在某些方面中,本文提供又一种用于借助可摄取设备对胃肠道取样的方法。该方法包括朝向在可摄取设备的外壳外部的环境以第一波长传输第一照明;从环境检测由第一照明所引起的第一反射率;朝向在可摄取设备的外壳外部的环境以第二波长传输第二照明;从环境检测由第二照明所引起的第二反射率;基于第一反射率和第二反射率确定可摄取设备在身体的胃肠道内的位置;以及,当所确定的位置匹配预定的位置时,对胃肠道取样。
在某些实施例中,所述对胃肠道取样包括使可摄取设备的外壳的部分从不允许样本从胃肠道进入样本室的取向运动到允许样本进入样本室的取向。
在某些实施例中,该方法还包括确定在对胃肠道取样之后的时间量;以及,当所确定的时间量大于阈值时对胃肠道重新取样。
在某些实施例中,该方法还包括基于所检测的第三反射率确定可摄取设备在胃肠道内的第二位置;以及,当所确定的位置匹配第二预定的位置时对胃肠道重新取样。
在某些实施例中,所述对胃肠道重新取样包括使可摄取设备的外壳的部分从不允许第二样本从胃肠道进入第二样本室的取向运动到允许第二样本进入第二样本室的取向。
在某些方面中,本文提供又一种可摄取设备。可摄取设备包括外壳,所述外壳由第一端部、第二端部和径向壁限定,所述第二端部与第一端部相对,所述径向壁从第一端部纵向地延伸到第二端部;位于外壳近侧的取样室;在外壳内的感测单元,感测单元包括:第一光学感测分单元,其配置成朝向在外壳外部的环境以第一波长传输第一照明并且从环境检测由第一照明所引起的第一反射率;第二光学感测分单元,其配置成朝向在外壳外部的环境以第二波长传输第二照明并且从环境检测由第二照明所引起的第二反射率;位于可摄取设备内的处理模块,所述处理模块配置成:基于第一反射率和第二反射率确定可摄取设备在身体的胃肠道内的位置;以及,当通过致动外壳的部分和取样室中的至少一个而使识别出的位置匹配预定的位置时,对胃肠道取样。
在某些实施例中,可摄取设备还可以根据本文的教导中的任一个限定。
在某些方面中,本文提供又一种用于借助可摄取设备对胃肠道取样的系统。该系统包括用于朝向在可摄取设备的外壳外部的环境以第一波长传输第一照明的装置;用于从环境检测由第一照明所引起的第一反射率的装置;用于朝向在可摄取设备的外壳外部的环境以第二波长传输第二照明的装置;用于从环境检测由第二照明所引起的第二反射率的装置;用于基于第一反射率和第二反射率确定可摄取设备在身体的胃肠道内的位置的装置;和用于当所确定的位置与预定的位置匹配时对胃肠道取样的装置。
在某些实施例中,该系统还可以根据本文的教导中的任一个限定。
在某些方面中,本文提供又一种用于借助可摄取设备将物质释放到胃肠道中的方法。该方法包括朝向在可摄取设备的外壳外部的环境以第一波长传输第一照明;从环境检测由第一照明所引起的第一反射率;朝向在可摄取设备的外壳外部的环境以第二波长传输第二照明;从环境检测由第二照明所引起的第二反射率;基于第一反射率和第二反射率确定可摄取设备在身体的胃肠道内的位置;以及,当所确定的位置匹配预定的位置时,将物质释放到胃肠道中。
附图说明
以上和其它目的和优点将在参照附图考虑以下详细说明而变得显而易见,在附图中贯穿附图相似的附图标记指示相似的部件,并且其中:
图1A是可摄取设备的示例性实施例的视图。
图1B是图1A的可摄取设备的分解图。
图2A是可以用于图1A的可摄取设备的电气部件的示例性框图。
图2B和图2C是可以用在图1A的可摄取设备中的电路设计的示例性实施例。
图2D是可以用在图1A的可摄取设备中的柔性PCB的电路设计的俯视图。
图2E是图2D的电路设计的仰视图。
图3A和图3B是用于可摄取设备的示例性传感器配置的简图。
图4A和图4B是用于可摄取设备的另一个示例性传感器配置的简图。
图5A和图5B是用于可摄取设备的又一个示例性传感器配置的简图。
图6A和图6B是用于可摄取设备的又一个示例性传感器配置的简图。
图7A至图7C示出在示例性操作中的图3A的可摄取设备的简图。
图8A是可摄取设备的示例性实施例的剖视图,其示出用于在操作期间会能够传输和检测的光的区域。
图8B和图8C是在示例性操作中的图8A的可摄取设备的简图。
图9A是用于本文所述的可摄取设备的操作方法的示例性实施例的流程图。
图9B是确定在本文所述的可摄取设备外部的环境的质量的方法的示例性实施例的流程图。
图10A至图10C是在通过个人的胃肠(GI)道的示例性运送期间的图3A的可摄取设备的简图。
图11A至图11C是在通过个人的GI道的示例性运送期间的图4A的可摄取设备的简图。
图12A至图12C是在通过个人的GI道的示例性运送期间的图5A的可摄取设备的简图。
图13A至13C是示出在图3A的可摄取设备的示例性操作期间所采集的数据的绘图。
图14A是可摄取设备的另一个示例性实施例的分解图。
图14B是图14A的可摄取设备的剖视图。
图15是可以用于图14A的可摄取设备的电气部件的示例性框图。
图16是用于图14A的可摄取设备的操作方法的示例性实施例的流程图。
图17A至图17C是可以供可摄取设备使用的基站的示例性实施例的不同的视图。
图18A至图18C是用于与本文所述的可摄取设备互动的用户界面的示例性实施例的屏幕截图。
图19是可摄取设备的另一个示例性实施例的视图。
图20是图19中的设备的简化的俯视图和侧视图。
图21示出了在与不同的环境互动的设备的某些实施例中如何使用光波长。
图22示出了胃肠道的不同区域在与设备有关联时的反射特性。
图23示出了如何可以在胃肠道的不同区域中检测不同类型的反射光。
图24示出了在胃肠道的不同区域中测量的反射率和用于使设备本地化的处理。
图25是可以用于对胃肠道取样或释放药剂的可摄取设备的另一个实施例的外观图。
图26是图25的可摄取设备的分解图。
图27示出了与设备的某些实施例相对应的主要电气分单元。
图28示出了与设备的某些实施例相对应的固件。
图29是根据设备的某些实施例的流程图,所述流程图说明了设备的“快循环”操作,其可以允许用于以较短的间隔高速处理。
图30A和图30B示出根据设备的某些实施例的流程图,所述流程图说明了设备的“慢循环”操作。
图31是根据设备的某些实施例的流程图,所述流程图说明了在示例性应用中的设备的操作状态。
图32是示出在设备的某些实施例中所使用的盲肠检测算法的流程图。
图33是示出在设备的某些实施例中所使用的十二指肠检测算法的流程图。
图34是在试验期间来自施用给病人的可摄取设备的数据。
图35是彩图,其示出在十三个不同的试验中由设备所检测的反射光的变化程度。
具体实施方式
本文说明了各种系统、设备和方法以提供用于要求保护的主旨的至少一个实施例的示例。实施例不限制任何要求保护的主旨,并且任何要求保护的主旨可以覆盖与本文所述的那些不同的系统、设备和方法。能够的是要求保护的主旨不限于具有本文所述的系统、设备和方法中的任一个的全部特征的系统、设备和方法或者不限于为本文所述的系统、设备和方法中的多个或全部所共有的特征。会能够的是本文所述的系统、设备或方法不是任何要求保护的主旨的实施例。在本文所述的系统、设备和方法中所公开的、且在本文献中不要求保护的任何主旨可以是另一个保护器械的主旨,例如,连续的专利申请、发明人或所有者意在通过在本文献中的公开内容而不放弃、不弃权或不献给公布的任何这种主旨。
将应理解,为了说明的简洁和清晰,在认为合适的地方,附图标记可以在附图之中重复以指示相对应的或类似的元件。另外,阐述了许多具体的细节,以便提供对本文所述的实施例的彻底理解。然而,本领域的技术人员将应理解,本文所述的实施例可以在没有这些具体的细节的情况下实行。在其它实例中,还没有详细地说明公知的方法、程序和部件,以便不模糊本文所述的实施例。而且,本说明不被认为限制了本文所述的实施例的范围。
应当注意到,诸如“基本”、“大约”、和“近似”的程度术语当在此使用时意味着修改项的合理的偏差量,以便使最终结果没有明显地变化。如果修改项的偏差将不否定其修改的项目的含义的话,这些程度术语应当被解释为包含该修改项的偏差。
另外,如本文所使用的,措辞“和/或”意在表示可兼的逻辑或。即,“X和/或Y”意在意味着X或Y或二者,例如。作为另一个示例,“X、Y和/或Z”意在意味着X或Y或Z或它们的任何组合。
如本文所使用的,术语“联接”指示两个元件可以彼此直接联接或彼此通过一个或多个中间元件联接。
如本文所使用的,术语“身体”指的是接收可摄取设备的病人、主体或个人的身体。病人或主体通常是人类或其它动物。
本文所述的各种实施例通常涉及一种可摄取设备,所述可摄取设备用于识别出在胃肠(GI)道内的一个或多个位置,并且在某些实施例中,用于采集数据和/或在所识别出的位置处释放包括药剂和治疗剂在内的物质。如本文所使用的,术语“胃肠道”或“GI道”指的是对消耗和消化食物、吸收营养和排出废物负责的器官系统的所有部分。这包括管口和器官,例如,口腔、咽喉、食道、胃、小肠、大肠、直肠、肛门和类似物,以及连接上述部件的各种流道和括约肌。
如本文所使用的,术语“反射率”涉及源自于由设备发出、反射回到设备且由设备中或上的检测器接收的光的值。例如,在某些实施例中,这涉及由设备发出的光,其中,光的部分由在设备外部的表面反射,并且光由位于设备中或上的检测器接收。
如本文所使用的,术语“照明”涉及任何电磁发射。在某些实施例中,照明可以位于红外光(IR)、可见光谱和紫外光(UV)的范围内,并且照明可以使其功率的大部分居中于在100nm至1000nm的范围内的特定的波长。在某些实施例中,会有利的是使用这样的照明,即,所述照明的功率的大部分被限于红外光谱(750nm至1000nm)、红色光谱(620nm至750nm)、绿色光谱(495nm至570nm)、蓝色光谱(450nm至495nm)或紫外光谱(100nm至400nm)之一。在某些实施例中,可以使用具有不同的波长的多个照明。
现在参照图1A,其中示出的是可摄取设备10的示例性实施例的视图,其中已经去除了可摄取设备10的外壳12的部分。可摄取设备10可以用于独立自主地识别出身体内的位置,例如,胃肠道的部分。在某些实施例中,可摄取设备10可以辨别出是位于胃中、位于小肠中还是位于大肠中。在某些实施例中,可摄取设备还可以能够辨别出位于小肠的什么部分中,例如,十二指肠、空肠或回肠。可摄取设备10可以通常具有胶囊的形状,如同常规的药丸。因此,可摄取设备10的形状设置成用于容易摄入并且为保健医师和病人所熟悉。
与常规的药丸不同,可摄取设备10被设计成经受住GI道的化学和机械环境(例如,肌肉收缩力和胃中的高浓度盐酸的影响)。然而,与打算留在病人的身体内的其它设备(例如,医用植入物)不同,可摄取设备10可以被设计成暂时在身体内行进。因此,支配可摄取设备10的材料和制造的规范性规则可以比用于打算留在身体内的设备的那些较不严格。然而,因为可摄取设备10进入身体,用于制造可摄取设备10的材料通常被选择为至少遵守用于生物相容性的标准(例如,ISO 10993)。此外,可摄取设备10内的部件没有任何受限的和/或有毒的金属并且依照欧洲议会的指令2002/95/EC是无铅的,所述欧洲议会的指令2002/95/EC也被已知为有害物质禁用指令(RoHS)。
广泛范围的材料可以用于制造可摄取设备10。不同的材料可以用于可摄取设备10的不同的部件中的每个。这些材料的示例包括,但不限于,遵守用于生物相容性的ISO10993和USP第六类规范的热塑性塑料、含氟聚合物、弹性体、不锈钢和玻璃;以及任何其它适当的材料和它们的组合。在一些实施例中,这些材料还可以包括:液体硅胶材料,其具有如使用硬度计(例如,由NuSilTM所制造的MED-4942TM)所确定的10至90的硬度等级;软生物相容性的聚合物材料,例如,但不限于,聚氯乙烯(PVC)、聚醚砜(PES)、聚乙烯(PE)、聚氨酯(PU)或聚四氟乙烯(PTFE);和刚性聚合物材料,其用生物可相容的材料涂覆,所述生物可相容的材料是软或柔韧的,(例如,用硅酮聚合物涂覆的聚(甲基丙烯酸甲酯)(PMMA)材料)。对于不同的部件使用不同的材料会能够使一些表面功能化以用于与蛋白质、抗体和其它生物标志物相互作用。例如, 可以在可摄取设备10中用作用于可运动部件的材料,以便降低这些部件之间的摩擦。其它示例性材料可以包括通常用在微加工中的其它材料,例如,聚二甲硅氧烷(PDMS)、硼硅酸盐玻璃和/或硅。虽然我们可以参考正用于构造设备的具体材料以用于说明的目的,但是所列举的材料意在不是限制性的,并且本领域的技术人员可以在不影响设备的整体操作或功能性的情况下容易地使设备适于使用任何数量的不同的材料。
可以在可摄取设备10中用作用于可运动部件的材料,以便降低这些部件之间的摩擦。其它示例性材料可以包括通常用在微加工中的其它材料,例如,聚二甲硅氧烷(PDMS)、硼硅酸盐玻璃和/或硅。虽然我们可以参考正用于构造设备的具体材料以用于说明的目的,但是所列举的材料意在不是限制性的,并且本领域的技术人员可以在不影响设备的整体操作或功能性的情况下容易地使设备适于使用任何数量的不同的材料。
在某些实施例中,可摄取设备10的外壳12可以由一种类型的塑料制造,例如,光敏丙烯酸聚合物材料或惰性聚碳酸酯材料。外壳12还会使用可以通过化学物质消毒的材料形成。
外壳12可以通过将两个封壳部分联接在一起而形成。例如,两个封壳部分可以借助粘合材料被配对和熔融在一起,所述粘合材料例如是氰基丙烯酸酯变体。实际上,外壳12保护可摄取设备10的内部以防其外部环境,并且也保护外部环境(例如,胃肠道)以防可摄取设备10内的部件。
此外,可摄取设备10可以包括一个或多个额外的保护层。额外的保护可以保护病人或个人以抵抗由与外壳12相关联的任何结构问题(例如,外壳12中的两个封壳部分瓦解或裂缝发展)所引起的不利影响。例如,可摄取设备10内的电源可以用惰性和柔韧材料(例如,硅酮聚合物的薄层)涂覆,以便使仅电源上的电触头被暴露。该对电源的额外的保护可以防止可摄取设备10内的化学物质渗进病人的身体内。
在某些实施例中,可摄取设备10的表面和可摄取设备10中的不同的部件的表面可以接收不同的处理,所述不同的处理根据可摄取设备10的预期用法而变化。例如,可摄取设备10的表面可以接收等离子体活化以用于渐增的亲水表现。在另一个示例中,为了使在所采集的样本和/或用于释放的物质中的交叉污染最小化,可以与这些样本和/或物质接触的一些存储部件可以接收亲水性处理,而同时一些其它部件可以接收疏水性处理。
可摄取设备10的部件可以对于用常规工具(例如,机床、手动铣床、压钻机和类似物)制造而言是太小和太复杂了,但是对于使用微制造技术的高效构造而言又太大了。可以使用落入常规技术和微制造技术之间的制造技术,其包括,但不限于,3D打印(例如,3D的多喷嘴建模(MJM)),机械计算机辅助设计(CAD)。SolidWorksTM和/或AlibrTM的软件包是CAD软件的示例,其可以用于设计可摄取设备10的一些部件,但是可以使用任何适当的CAD软件。
在某些实施例中,可摄取设备10的部件可以使用不同的常规制造技术制造,例如,喷射造型法、计算机数控(CNC)加工和通过使用多轴向车床。例如,可摄取设备10的外壳12可以由CNC加工的聚碳酸酯材料制造,并且存储部件可以通过将诸如硅酮聚合物的生物可相容的材料施加到3D打印的模具或铸件而制造。
硅酮聚合物可以向可摄取设备10的制造处理提供某些优点。例如,在可摄取设备10中使用硅酮聚合物材料形成的部件可以使用常规方法制造,例如,模制技术。硅酮聚合物材料也是柔韧的材料。因此,由硅酮聚合物材料形成的可摄取设备10的部件可以在制造阶段期间容纳设计偏差的范围并且还可以适于压缩配合。
仍然参照图1A,示出根据示例性实施例的可摄取设备10。可摄取设备10包括外壳12,其用于提供用于各种电子和机械部件的封壳。外壳12包括第一端部部分16a、第二端部部分16b和从第一端部部分16a延伸到第二端部部分16b的径向壁14。
径向壁14可以由一个或多个部件形成。在图1A的示例中,径向壁包括第一壁部分14a、第二壁部分14b和用于将第一壁部分14a与第二壁部分14b连接的连接壁部分14c。可以依据可摄取设备10的应用使用径向壁14的其它构型。
现在参照图1B,其中示出的是在一个示例性实施例中的可摄取设备10的部件的分解图。如图1A和图1B中所示,在第一壁部分14a内封装的是印刷电路板(PCB)30、电池18、感测分单元32、42和通信分单元120。参照图2A至图2E说明可摄取设备10内的各种部件。
图2A是可以用于可摄取设备10的电气部件的示例性实施例的框图100。如在框图100中所示,可摄取设备10可以包括微控制器110、通信分单元120、感测分单元130、电源160和存储器分单元140。电子部件中的至少某些可以被嵌入在PCB 30上。
在某些实施例中,微控制器110包括编程、控制和存储电路以及嵌入PCB 30上的其它外围设备,所述编程、控制和存储电路用于保持和执行固件或软件及协调可摄取设备10的所有功能。例如,微控制器110可以使用32位微控制器来实施,例如,所述32位微控制器来自于STMicroelectronicsTM的STM32系列,但是可以使用任何适当的微控制器。
在图2A中所提供的微控制器110可以包括通用输入/输出(I/O)接口112、SPI或通用异步接收器/发送器(UART)接口114和模拟-数字转换器(A/D转换器)116。微控制器110可以将A/D转换器116考虑为外围设备。
通用I/O接口112包括固定数量的通用输入/输出引脚(GPIO)。这些GPIO可以被分组成以两个引或三个引脚为一组的多组引脚以用于实施各种通信协议,例如,单-线接口(SWI)、两-线接口(例如,内置集成电路或I2C)和/或串行外围接口(SPI)。委托给这些通信协议的多组GPIO可以用作总线以用于将微控制器110与一个或多个外围设备连接。
使用以上列出的通信协议中的任一个或使用任何其它适当的通信协议,微控制器110可以将一系列请求发送到与特定的GPIO组相关联的地址以用于检测在总线上存在有哪些外围设备(如果有的话)。如果外围设备中的任一个都存在于总线上,则存在的外围设备在指定的时间框架内将确认信号返回到微控制器110。如果在该指定的时间框架内没有接收到响应,则认为外围设备是缺席的。
A/D转换器116可以与感测分单元130中的任一个传感器联接。在某些实施例中,可摄取设备10可以通过接收和/或传输红外光而通信,在该情况下在通信分单元120中包含有联接到A/D转换器116的红外(IR)敏感的光电晶体管和电阻器。另外地,在某些实施例中,可摄取设备10可以包括红外(IR)发光二极管(LED),其联接到微控制器110以将信号传达到设备的外侧。
在某些实施例中,通信分单元120可以从外部设备接收操作指令,所述外部设备例如是基站(例如,在基座(dock)上的红外发射机和/或接收器)。基站可以用于在操作期间实时或在从身体检索可摄取设备10之后用操作指令对可摄取设备10初始编程和/或与可摄取设备10通信。在某些实施例中,通信分单元120确实不从外部设备接收任何操作指令,并且反而可摄取设备10在体内独立自主地操作。
在某些实施例中,通信分单元120可以包括光编码器20,例如,红外发射器和接收器。IR发射器和接收器可以配置成使用已调制的红外光操作,所述已调制的红外光即为在阶段850nm至930nm的波长范围内的光。此外,IR接收器可以被包含在可摄取设备10中以用于从在基站处的IR发送器接收编程指令,并且IR发送器可以被包含在可摄取设备10中以用于将数据传输到在基站处的IR接收器。因此,可以在可摄取设备10与基站之间设置双向IR通信。将应理解,在某些实施例中可以使用其它类型的光编码器或通信分单元;例如,某些通信分单元可以利用蓝牙、射频(RF)通信、近场通信和类似物,而不是光信号(或除光信号之外)。
感测分单元130可以包括各种传感器以在可摄取设备10在身体内运送的同时获取体内信息。可以在可摄取设备10的不同的位置处设置各种传感器,例如,径向传感器32和轴向传感器42,以帮助识别出可摄取设备10可以在身体内处于何处。在某些实施例中,由传感器32、42所提供的数据可以用于触发可摄取设备10的操作。例如,在某些实施例中,可摄取设备10可以适于包括取样室,所述取样室能够从胃肠道从在设备周围的区域取得样本,并且由传感器32、42所提供的数据可以触发设备以获取样本。每个传感器32、42都可以包括照明器32i和42i以及检测器32d和42d。参照图3A至图8C进一步说明传感器32、42。作为另一个示例,在某些实施例中,可摄取设备10可以适于递送包括药剂和治疗剂在内的物质,并且由传感器32、34所提供的数据可以触发设备以递送物质。
存储器分单元140可以设有内存存储部件142,例如,闪存存储器、EEPROM和类似物。存储器分单元140可以用于存储从基站接收的指令并且存储各种其它操作数据,例如,由感测分单元130所采集的运送数据和传感器数据。在某些实施例中,微控制器110可以操作以执行存储在存储器分单元140处的指令,所述指令可以涉及操作可摄取设备10的其它部件,例如,感测分单元130、通信分单元120和电源160。
在某些实施例中,电源160可以包括一个或多个电池18,其由不同的化学成分形成,例如,锂聚合物、锂碳、氧化银、碱性的和类似物。这可以帮助适应可摄取设备10中的各种部件的不同的电源要求。在某些实施例中,电源160可以包括氧化银电池单体以用于将电力供给到可摄取设备10中的各种部件。向电源160供电的电池单体可以在1.55V下操作。例如,可以使用例如由RenataTM所制造的氧化银钮扣电池类型的电池,这是由于钮扣电池式电池具有适合可摄取设备10的操作的放电特性。在某些实施例中,可以使用其它类型的电池单体。
在某些实施例中,对于电源160而言能够包括一个或多个电池单体。例如,多个钮扣电池可以用于为可摄取设备的操作提供更高的电压。对于电源160而言还可以能够的是包括一个或多个不同类型的电池单体。
而且,电源160可以被分成一个或多个单体组以防止在电源160处的暂时中断或变化影响可摄取设备10的整体操作。例如,示例性电源160可以包括三个单体,并且每个单体都可操作成提供1.55伏特。在一个示例性实施例中,三个单体可以被设置为一个单体组,其可操作成提供4.65伏特作为全电压。调压器可以控制由单体组所提供的电压。调压器可以操作成向微控制器110提供已调整的电压,例如,3.3伏特,而同时操作成向感测分单元130提供全电压。在另一个示例性实施例中,三个单体可以被设置为两个不同的单体组,第一单体组包括两个单体,并且第二单体组包括一个单体。因此,第一单体组可以提供3.1伏特,而第二单体组可以提供1.55伏特。第一单体组可以是可操作成向微控制器110提供3.1伏特以防止电压变化。第一单体组和第二单体组可以继而组合以向感测分单元130提供4.65伏特。
在某些实施例中,电源160可以包括磁开关162,其用于操作为用于可摄取设备10的'ON'/'OFF'机构。当暴露于较强磁场时,磁开关162可以被维持在'OFF'位置中,在所述'OFF'位置中可摄取设备10没有被激活。较强磁场可以有效地停止可摄取设备10中的电流,促使发生开路。例如,这可以防止可摄取设备10在施用给病人之前耗能和使电池18放电。然而,当磁开关162不再暴露于较强磁场时,磁开关162可以切换到'ON'位置以激活可摄取设备10。电流可以继而流过可摄取设备10中的电气通路(例如,在PCB 30上的通路)。
在某些实施例中,来自MEDERTM电子的MK24磁环感应器可以用作磁开关162,但是可以使用任何适当的磁开关。例如,在某些实施例中,磁开关162可以是磁力致动的、常闭的、单刀单掷(SPST至NC)开关。在某些实施例中,例如,由MEMSCAPTM所制造的微机电系统(MEMS)磁开关可以用作磁开关162。在某些实施例中,磁开关162可以是霍尔效应传感器。
在某些实施例中,电源160可以从可摄取设备10去除以通过在可摄取设备10外部的充电电路再充电。在某些实施例中,当在PCB 30上包含有充电电路时,电源160可以在处于可摄取设备10中的同时被再充电;例如,通过提供允许可摄取设备10被感应地联接到基站和无线地充电的电路。
图2B是可摄取设备10的某些电气部件的示例性电路设计102。将应理解,电路设计102仅仅是示例并且可以类似地使用其它配置和设计。图2C是感测分单元130的示例性电路设计104。
如上所述,电子部件中的某些可以被嵌入在PCB 30上。图2D和图2E分别示出柔性PCB 30的电路设计的俯视图106t和仰视图106b。
PCB 30可以由柔性印刷电路构成。柔性印刷电路可以通过能够较易于符合可摄取设备10的尺寸约束而使可摄取设备10内的空间利用最大化。增大的柔性允许PCB或PCB的某些部件更加扭曲、弯曲和成形,最终产生较小的药丸,所述较小的药丸对于振动力或扭转力而言更加坚固。
PCB 30在该示例中包括通信分单元120、微控制器110、感测分单元130和以下将说明的其它外围部件。位于PCB 30上的电子部件借助一个或多个电子信号通路、痕迹或轨道电力地联接到其它部件。
柔性PCB 30可以使用柔性塑料材料和刚性材料的组合制造,例如,编织玻璃纤维布材料,或任何其它适当的材料。因此,所得到的柔性PCB 30可以呈现出柔韧质量和刚性质量二者。柔性PCB 30的柔韧质量能够使位于柔性PCB 30上的电子部件符合可摄取设备10的尺寸约束。尤其,如在图1A中大致示出,柔性PCB 30可以被插入到第一壁部分14a中。同时,柔性PCB 30的刚性质量能够使会易受较高物理应力水平影响的区域加固。例如,在某些实施例中,用于将柔性PCB 30连接到电源160的接触端子(例如,218b、218b)会已经添加了加固。
如图2D和图2E中所示,柔性PCB 30包括一个或多个分开的但连接的分段。例如,柔性PCB 30可以包括主要PCB分段202和一个或多个较小PCB分段204,例如,较小PCB分段204a和204b。较小PCB分段204可以被直接地或间接地连接到主要PCB分段202。主要PCB分段202可以被滚轧成大致圆柱形形状以符合可摄取设备10的结构尺寸。
如图1B中所示,较小PCB分段204a和204b可以被折叠到一个或多个重叠的层中并且配合到可摄取设备10中。在某些实施例中,较小PCB分段204a和204b可以围绕电池18分层。将应理解,柔性PCB30可以具有不同的配置,例如,不同的形状和尺寸和/或不同的分段数量。
电子部件可以位于主要PCB分段202或较小PCB分段204a和204b中的任一个上。例如,如图2D和图2E中所示,主要PCB分段202可以包括微控制器110、磁开关162和径向传感器32。较小PCB分段204a可以包括光编码器20和轴向传感器42。较小PCB分段204a和204b还可以包括相应的电源接触端子218a和218b以用于接合电池18。在某些实施例中,在柔性PCB30上能够有这些部件的其它布置。
再次参照图1A,第一端部部分16a通常封装在可摄取设备10的第一壁部分14a处的部件。第一端部部分16a和第一壁部分14a可以用光学和无线电半透明或透明的材料制造。该类型的材料允许用于例如通过传感器32、42传输和接收光。在某些实施例中,第一端部部分16a和第一壁部分14a可以由塑料制造。
在某些实施例中,感测分单元130可以相对于外壳12取向或设置,以便减少由感测分单元130的输出所引起的内部反射。例如,感测分单元130可以相对于外壳12的圆周以一定角度取向,以便当感测分单元130的输出到达外壳12时由外壳12引起最低限度的内部反射。在某些实施例中,可以在感测分单元130与外壳12之间设置有过渡介质,例如,一些油性物质,以便使过渡介质和感测分单元130的折射率可以匹配外壳12的折射率,减少反射和散射。在某些实施例中,每个传感器的照明器和检测器(例如,传感器32的照明器32i和检测器32d)都可以物理上围绕设备的圆周分开。例如,在图8A至图8C、图19和图20中所讨论的实施例中,分开的照明器32i和检测器32d还可以减少内部反射。
在某些实施例中,感测分单元130在可摄取设备10的不同的位置处包括轴向感测分单元42和径向感测分单元32以帮助推定出可摄取设备10在身体内的位置。可摄取设备10、300以可变的速度在身体内运动。在胃肠道内,例如,不同的胃肠道分段的变化的尺寸、形状和环境可以使位置识别困难。
现在参照图3A和图3B,其中示出的是示例性可摄取设备300的简图。图3A和图3B通常示出传感器332、342相对于外壳12的某些部件的示例性配置。图3A是可摄取设备300的剖视图300A,并且图3B是可摄取设备300的三维侧视图300B。
轴向感测分单元42位于第一端部部分16a和第二端部部分16b中的至少一个的近侧。如图3A中所示,轴向传感器342位于第一端部部分16a近侧。将应理解,依据可摄取设备300的结构,轴向传感器342反而可以位于第二端部部分16b近侧。径向感测分单元32通常位于径向壁14近侧。例如,如图3A和图3B中所示,径向传感器332位于径向壁14的部分的近侧。
图10A至图10C中示出可摄取设备300的示例性运送。分别在450A、450B和450C处大致示出可摄取设备300通过胃452、小肠454并且继而通过大肠456的运送。可摄取设备300的运动基本上依据其位置而改变。如图10A中所示,胃452是较大的、开口的且洞穴状的器官,并且因此可摄取设备300可以具有较大范围的运动。另一方面,如图10B中所示,小肠454具有管状结构,并且可摄取设备300通常被限于纵向运动。与胃452类似,大肠456是较大的开口的结构,并且可摄取设备300如与通过小肠454运送相比可以具有较大范围的运动。通过设置轴向感测分单元42和径向感测分单元32,依据运送位置的形状和/或尺寸,可得到不同程度和类型的反射率数据。在图13A、图13B和图13C中进一步说明变化的反射率数据。
在某些实施例中,每个轴向传感器342和每个径向传感器332都可以包括照明器和检测器,所述照明器用于朝向在外壳12外部的环境指引照明,所述检测器用于从环境由照明所引起的检测反射率。照明可以包括在红外光(IR)、可见光谱和紫外光(UV)的范围内的任何电磁发射。以下参照图7A至图7C说明传感器342、332的示例性操作。
图7A至图7C示出在不同的环境中的轴向传感器342和径向传感器332的操作。在图7A至图7C中的每个图中,示出传感器332和342的照明器和检测器以用于可摄取设备300。轴向传感器342包括轴向照明器342i和轴向检测器342d,所述轴向照明器342i用于将轴向照明传输到外部环境,所述轴向检测器342d用于从外部环境(即,在可摄取设备300外部)检测轴向反射率。轴向反射率可以依据外部环境由不同的照明引起。
类似地,径向传感器332包括径向照明器332i和径向检测器332d,所述径向照明器332i用于将径向照明传输到外部环境,所述径向检测器332d用于从外部环境检测径向反射率。与轴向反射率类似,径向反射率可以依据外部环境由不同的照明引起。例如,在某些实施例中,可以有多个径向照明,并且所检测的径向反射率可以由从外部环境反射的且沿着多个方向散射的多个径向照明引起。如图7A至图7C中所示,径向照明器332i的位置使得所得到的径向照明沿着与由轴向照明器342i所产生的轴向照明不同的方向。在某些实施例中,径向照明与轴向照明基本垂直。
图7A示出可摄取设备300通过不透明液体410的运送。不透明液体410随着其在某些条件下通过胃肠道运送而与可摄取设备300的径向壁14接触,与在大肠(例如,图10C的大肠456)内的不透明流体可以与可摄取设备300接触的方式类似。因此,由径向照明器332i所传输的径向照明几乎整个地被内部反射并且通过径向检测器332d检测,引起较大的反射率正被检测。在该示例中,轴向检测器342d不检测任何反射率,这是因为在轴向照明器342i的前方没有设置任何物质或组织。
图7B示出可摄取设备300在组织412附近的运送。由径向照明器332i所传输的径向照明被部分地反射(并且部分地由组织412吸收)并且通过径向检测器332d检测,与由径向照明可以在条件下与小肠(例如,图10B的小肠454)或其它器官的组织相互作用的方式类似。与图7A类似,在该示例中,轴向检测器342d也不检测任何反射率,这是因为在轴向检测器342d的范围内没有设置物质或组织。由组织412所反射和吸收的照明的量可以取决于照明的波长。例如,红色组织可以良好地反射具有在红色光谱(即,620nm至750nm)中的波长的照明,引起可摄取设备300正检测较高反射率。相比之下,具有在绿色光谱(495nm至570nm)或蓝色光谱(450nm至495nm)中的波长的照明可以通过组织吸收,引起可摄取设备300正检测较低反射率。在某些实施例中,假定胃肠道的不同的器官和部分具有不同的反射特性,具有不同的相应的波长的多个径向或轴向照明可以用于帮助识别出可摄取设备300在胃肠道内的位置。
图7C示出可摄取设备300通过具有微粒414的透明液体的运送。该类型的环境可以在某些条件下与胃(例如,图10A的胃452)中发现的环境类似。如图所示,轴向照明和径向照明在相应的轴向照明器342i和径向照明器332i的范围内通过微粒414a至414d反射。对于照明中某些而言也能够从一个微粒反射到另一个微粒,例如从微粒414c反射到微粒414b。由轴向检测器342d和径向检测器332d中的每个所检测的反射率可以不限于由相应的轴向照明器342i和径向照明器332i所产生的照明。对于轴向检测器342d而言能够检测由径向照明所引起的反射率。类似地,对于径向检测器332d而言能够检测由轴向照明所引起的反射率。在某些实施例中,能够通过使轴向传感器342和径向传感器332使用具有两个不同的波长的照明而降低该影响。例如,如果径向传感器332具有传输和检测在红色光谱中的波长的照明器332i和检测器332d并且轴向传感器342具有传输和检测红外光谱中的波长的照明器342i和检测器342d,则降低轴向照明器342i对径向检测器332d的影响。
以下参照图4A至图8C说明传感器32、42的各种实施例。
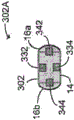
现在参照图4A和图4B,其中示出的是另一个示例性可摄取设备302的简图。图4A是可摄取设备302的剖视图302A,并且图4B是可摄取设备302的三维侧视图302B。可摄取设备302包括轴向感测分单元42和径向感测分单元32,所述轴向感测分单元42具有两个轴向传感器342和344,所述径向感测分单元32具有两个径向传感器332和334。
如参照图3A和图3B所述,轴向传感器342或第一轴向传感器位于第一端部部分16a近侧。轴向传感器344或第二轴向传感器位于第二端部部分16b近侧。如图4A和图4B中所示,第一轴向传感器342和第二轴向传感器344相对于外壳12彼此基本相对。因此,由第一轴向传感器342所产生的第一轴向照明将沿着与由第二轴向传感器344所产生的第二轴向照明基本相反的轴向方向。
可摄取设备302的径向传感器332或第一径向传感器位于径向壁的第一壁部分14近侧,而径向传感器334或第二径向传感器位于第二壁部分近侧。如图4A和4B中所示,第一壁部分沿着径向壁14的圆周与第二壁部分间隔开约180度。由相应的第一径向传感器332和第二径向传感器334所产生的第一径向照明和第二径向照明沿着不同的径向方向。结果,第一径向照明和第二径向照明沿着基本相反的方向传输。
通常,在其中径向感测分单元32由两个或更多个径向传感器332、334构成的实施例中,径向传感器332和334可以沿着径向壁14的圆周间隔开至少60度,以便使所得到的第一径向照明和第二径向照明沿着彼此大致不同的径向方向。而且,径向传感器332和径向传感器334之间的分开可以帮助使内部反射最小化。
当在可摄取设备10、300、302中设置有更多的传感器时,更多的反射率数据将变得可用。如参照图10A至图12C所述,反射率数据可以增大准确度,借助所述准确度可以识别出可摄取设备10、300、302在体内的位置。
现在参照图5A和图5B,其中示出的是又一个示例性可摄取设备304的简图。图5A是可摄取设备304的剖视图304A,并且图5B是可摄取设备304的三维侧视图304B。与可摄取设备300类似,可摄取设备304包括轴向感测分单元42,其具有一个轴向传感器342。然而,与可摄取设备300和302不同,可摄取设备304的径向感测分单元32包括四个径向传感器332、334、336和338。
如上所述,径向传感器332、334、336和338通常被设置成使得它们沿着径向壁14的圆周间隔开至少60度。在可摄取设备304中,径向传感器332、334、336和338可以沿着径向壁14的圆周定位成彼此基本等距。注意到,与可摄取设备300类似,但是与可摄取设备302不同,可摄取设备304在第一端部部分16a附近具有单个轴向传感器342。在某些实施例中,可摄取设备(例如,可摄取设备300、304)可以具有位于第二端部部分16b近侧的取样室,所述取样室与轴向传感器342的位置基本相对。在图14A、图14B和图25中示出该实施例。在某些实施例中,可摄取设备(例如,可摄取设备700、2500)可以具有用于存储物质的室,所述物质被递送到胃肠道。在图14A至图14B和图25中示出这些实施例。
现在参照图6A和6B,其中示出的是又一个示例性可摄取设备306的简图。图6A是可摄取设备306的剖视图306A,并且图6B是可摄取设备306的三维侧视图306B。可摄取设备306包括轴向感测分单元42和径向感测分单元32,所述轴向感测分单元42与图4A和图4B的可摄取设备302类似具有两个轴向传感器342和344,所述径向感测分单元32与图5A和图5B的可摄取设备304类似具有四个径向传感器332、334、336和338。
现在参照图8A,其中示出的是可摄取设备308的又一个示例性实施例的剖视图。为了便于阐述,在图8A中未示出可摄取设备308的轴向感测分单元42。径向感测分单元32包括三个径向传感器352、354和356。在可摄取设备308中,相应的径向传感器352、354和356中的每个的照明器和检测器彼此分开约60度。就该配置而言,径向照明器352i、354i和356i中的每个都具有相对于径向壁14的圆周约120度的相应的照明区域362i、364i和366i。类似地,径向检测器352d、354d和356d中的每个都具有相对于径向壁14的圆周约120度的相应的检测区域362d、364d和366d。
径向传感器352、354和356之间的分开可以帮助使内部反射最小化。例如,当可摄取设备308中的径向传感器352、354和356彼此分开约60度时,径向传感器352、354和356彼此沿着可摄取设备308的圆周大致等距并且也彼此分开最大的距离。结果,在外壳12的接口处的内部反射可以最小化。
图8B和图8C示出在不同的环境中的径向传感器352、354和356的示例性操作。图8B在402A处示出通过小肠454运送的可摄取设备308。由于小肠454的管状结构,小肠454的壁紧密地包围可摄取设备308。图8C在402B处示出通过较大空间例如胃452运送的可摄取设备308。通过以图8A中所示的方式物理上分开径向照明器352i、354i和356i和径向检测器352d、354d和356d,可以如图8B和图8C中所示检测更加可变的反射率。
对于本文所述的可摄取设备10、300、302、304、306和308而言,轴向感测分单元42可以包括一个或多个轴向传感器。轴向传感器中的至少一个可以具有作为照明器的红外发光二极管(IR-LED)和对红外光谱中的照明敏感的检测器。径向感测分单元32还可以包括一个或多个径向传感器。在某些实施例中,径向传感器可以包括作为照明器的黄绿色LED发射光,其具有约571nm的波长。在某些实施例中,径向传感器可以包括绿色LED发射光和红色LED发射光,所述绿色LED发射光具有约517nm的波长,所述红色LED发射光具有约632nm的波长。在某些实施例中,径向传感器可以包括RGB LED包,其能够发射多个不同波长的照明。
当径向传感器包括RGB LED包时,可摄取设备10可以相继地发射不同的波长。一些组织和流体对于不同的波长的照明而言可以具有不同的吸收率。在使用RGB LED的情况下,可以采集和分析较大范围的反射率数据。
例如,RGB LED包可以传输具有在约632nm处的波长的红色照明并且检测由红色照明所引起的反射率。RGB LED包可以继而传输具有在约518nm处的波长的绿色照明并且检测由绿色照明所引起的反射率。RGB LED包可以继而传输具有在约465nm处的波长的蓝色照明并且检测由蓝色照明所引起的反射率。为了基于由RGB LED包在各种频率下所采集的反射率数据确定可摄取设备10的相对应的位置,微控制器110和/或外部处理模块可以将每个反射率数据系列彼此比较。会能够的是可以不予考虑在特定波长的反射率数据系列的某一个或多个部分。在图19至图24中示出这样的实施例,即,所述实施例通过比较来自不同的波长的反射率数据来确定设备的位置。
从不同类型的照明中的每个所检测的反射率可以被存储在存储器分单元140中以用于通过微控制器110随后处理。另外地,在某些实施例中,该处理可以通过外部处理模块进行。
在某些实施例中,轴向传感器和径向传感器可以包括准直的光源。准直的光源可以对反射光取向,以便使来自某些外部环境的反射率最大化,所述某些外部环境例如是圆形形状的解剖结构。例如,照明可以由准直的光源来提供,所述准直的光源可以使用LED封装(binning)或补充透镜来提供,或者照明可以由准直的光源和不准直的光源的组合来提供。
在某些实施例中,在本文所述的各种可摄取设备10、300、302、304和306的感测分单元130采集反射率数据之后,通信分单元120可以将所检测的径向和轴向反射率数据传输到外部处理模块。在某些实施例中,在可摄取设备10、300、302、304和306中设置有设备处理模块(未示出),并且反射率数据可以被提供到设备处理模块以用于处理。处理模块,不管它是哪一种,都可以继而根据本文所述的方法识别出相应的可摄取设备10、300、302、304和306的位置。在某些实施例中,微控制器110可以起到处理模块的功能。
如上所述,处理模块可以是设置在PCB 30上的微控制器110或外部处理模块。当所检测的数据被提供到外部处理模块以用于分析时,通信分单元120可以将所检测的数据存储在存储器分单元140中并且随后将所检测的数据提供到外部处理模块(例如,在可摄取设备10、300、302、304和306从身体离开之后),或通信分单元120可以使用无线通信部件实时地提供所检测的数据,例如,射频(RF)发送器。然而,应当注意到,用于确定设备的位置的处理中的某些或全部可以由微控制器110在设备内执行。
如上所述,由感测分单元130所采集的反射率数据可以用于推断出可摄取设备10的体内位置。如参照图9至图12C所述,轴向反射率数据和径向反射率数据可以用于识别出不同的器官和/或运送点。例如,轴向反射率和径向反射率的水平可以指示外部环境的类型。
而且,不同的材料可以具有不同的折射率,并且因此所得到的吸光特性可以改变。例如,流体趋向于具有比组织低的折射率。依据器官的类型,可以存在不同的材料。例如,在胃中,可以存在某些液体和食物颗粒。另一方面,在小肠中,存在有限的液体,但是可以存在气泡或气体。基于反射率数据,处理模块可以确定其中检测反射率数据的环境的一些特性。
现在参照图9A,该图是用于可摄取设备10、300、302、304、306和308的操作的示例性方法500或本文所述的另一个实施例的流程图。为了说明可摄取设备10、300、302、304、306和308的操作,也参照图10A至图12C。
在步骤510处,可以设置本文所述的可摄取设备中的任一个,例如10、300、302、304、306和308。如上所述,感测分单元130可以传输照明并且采集通过照明与外部环境相互作用所引起的反射率数据。
可摄取设备10、300、302、304、306和308可以由个人摄取并且可以继而通过个人的身体运送。图10A至图12C中示出可摄取设备300、302、304和306中的每个在GI道的部分内的示例性运送。
在步骤520处,感测分单元130被操作成随着可摄取设备10、300、302、304、306和308通过身体运送而采集反射率数据系列。
反射率数据系列可以包括轴向反射率数据系列和径向反射率数据系列。轴向反射率数据系列和径向反射率数据系列中的每个都可以包括一个或多个反射率值,其指示在运送的至少部分期间由感测分单元130所检测的相应的轴向反射率和径向反射率。在某些实施例中,处理模块可以实时地接收反射率数据系列并且操作成实时地识别出体内位置,并且因此处理模块将仅可以利用反射率数据系列的部分。在某些实施例中,处理模块可以在可摄取设备10、300、302、304、306和308已经离开身体之后接收反射率数据,并且因此完整的反射率数据系列可用于处理模块。
图10A至图10C大致示出可摄取设备300通过胃452、通过小肠454并且继而通过大肠456的运送。
如图450A处所示,胃452是较大的空间。因此,可摄取设备300可以沿着所有轴线运动。可摄取设备300的运动可以在反射率数据系列中引起较高偏差。而且,胃452的内容不但可以包括较透明的液体,而且如果个人在摄取可摄取设备300之前没有禁食或没有充分地禁食的话,还包括微粒。因此,可以通过微粒的存在而引起一些反射率数据。
在图10A的示例中,可摄取设备300随着其运送通过胃452而转动若干次。将应理解,可摄取设备300的路径和取向仅仅是示例,并且能够有其它路径和取向。在位置“I”处,轴向传感器342和径向传感器332二者面对胃452的壁,但是在不同的距离处。所得到的由轴向传感器342和径向传感器332检测到的反射率将由于由不同的距离所导致的不同的吸收量而可能改变。轴向反射率和径向反射率将有可能由胃452的壁与胃452内的微粒414相互作用而引起。轴向传感器342也有可能检测由径向传感器332所产生的照明而引起的反射率,并且反之亦然。轴向和径向反射率值可以借助会在胃452中存在的内容物而改变。如果个人已经充分地禁食,则在胃452中可以有较少量的微粒414,并且因此,所得到的反射率值可以较低。
在位置“II”处,轴向传感器342比在位置“I”处更极为接近地面对胃452的壁。轴向传感器342由于极为接近胃452的壁而将从胃的壁检测较高反射率值。径向传感器332不直接面对胃452的壁。然而,因为径向传感器332暴露于胃452的内容物,径向传感器332将检测由在胃452内存在的任何微粒414所引起的反射率。
由轴向传感器342和径向传感器332在位置“III”处所检测的轴向和径向反射率与在位置“I”处所检测的反射率类似。值可以由于胃452的内容物由于不同的吸收量而变化。
然而,在位置“IV”处,可摄取设备300开始通过幽门运送,所述幽门与胃452比较是明显更窄的结构。如图10A中所示,轴向传感器342面向小肠454,并且因此将继续检测由会存在于小肠454中的内容物所引起的反射率。然而,径向传感器332与幽门壁紧密接触,并且将检测由幽门壁的照明所引起的较高反射率值。由于幽门壁与径向传感器332之间的紧密接触,轴向传感器342将检测由径向传感器332传输的照明所引起的非常小的(如果有的话)的反射率。
图10B示出可摄取设备300通过小肠454的运送。如上所述,小肠454具有管状结构,并且因此,可摄取设备300受限于沿着其纵向轴线的纵向和转动运动。而且,小肠454通常包括有限的液体,但是可以包括湿黏液层和气泡或气体。
由可摄取设备300在位置“V”和“VI”处所检测的轴向反射率和径向反射率与在位置“IV”处所检测的反射率类似。轴向传感器342面对小肠454的一个端部,并且将检测由微粒414(如果存在的话)或小肠454中的弯曲部所引起的反射率。然而,径向传感器332与小肠454的壁紧密接触,并且将检测由小肠454的壁的照明所引起的较高反射率值。由于小肠454的壁与径向传感器332之间的紧密接触,轴向传感器342将检测由径向传感器332传输的照明所引起的非常小的(如果有的话)的反射率。
在可摄取设备300通过小肠454运送之后,可摄取设备300进入大肠456。通常,大肠456的特征在于由于存在粪便物而具有不透明的棕色内容物。不透明的内容物可以包括液体和/或固体。依据正产生的照明的类型,在位置“VII”、“VIII”和“IX”处所检测的反射率将改变。例如,能够的是当照明处于可见光谱内(如在图7A中关于径向传感器332所示)时,在位置“VII”、“VIII”和“IX”处所检测的反射率可以主要是内部反射率。当照明是IR照明或绿色照明时,在位置“VII”、“VIII”和“IX”处所检测的反射率可以由于棕色的内容物而与相当高的值相关联。
参照图11A至图11C说明可摄取设备302通过胃452、通过小肠454并且继而通过大肠456的运送。如图4A和图4B中所示,可摄取设备302包括两个径向传感器332和334以及两个轴向传感器342和344。因此,可以检测额外的反射率值。
首先参照图11A,在位置“I”处由可摄取设备302中的传感器332、334、342和344检测的反射率值与由可摄取设备300中传感器332和342检测的反射率值类似。轴向传感器342、344和径向传感器332、334通常暴露于胃452内的内容物(如果有的话)。
在位置“II”处,第一轴向传感器342检测与由第二轴向传感器344检测的第二轴向反射率不同的第一轴向反射率。第一轴向传感器342与胃452的壁极为接近,而第二轴向传感器344离胃452的壁较远。因此,第一轴向传感器342将由于接近胃壁而检测较高反射率值,但是第二轴向传感器344将仅依据存在于胃452中的内容物的类型而检测反射率值。基于大大变化的第一轴向反射率和第二轴向反射率的比较,处理模块可以确定可摄取设备302还没有到达小肠454。
在位置“III”处,第二径向传感器334将由于其接近胃452的壁而检测较高反射率值。然而,第一径向传感器332如参照图10A所述检测随微粒414的量变化的反射率值。再次,处理模块可以确定可摄取设备304还没有到达小肠454。
随着可摄取设备302运动到幽门中,第一径向传感器332和第二径向传感器334由于与幽门壁紧密接触而开始检测较高反射率值。处理模块可以从径向反射率值确定会正发生过渡。由第一轴向传感器342和第二轴向传感器344检测的反射率值将分别由于它们的取向而继续取决于小肠454和胃452的内容物。
图11B示出可摄取设备302通过小肠454的运送。由可摄取设备302检测的径向反射率值将通常与由图10B中的可摄取设备300检测的径向反射率值类似,这是由于径向传感器332和334极为接近小肠454的壁。由轴向传感器342和344检测的轴向反射率值将再次依据可以存在于小肠454中的内容物而变化。
如上所述,大肠456的特征在于具有不透明的棕色内容物。因此,当照明处于可见光谱内时,随着可摄取设备302行进通过大肠456而在位置“VII”、“VIII”和“IX”处所检测的反射率(图11C中示出其示例)可以主要是内部反射率,并且当照明是IR照明或绿色照明时由于棕色而可以包括较高反射率值。
现在对于可摄取设备304而言参照图12A至图12C说明通过GI道的另一个示例性运送。可摄取设备304包括四个径向传感器332、334、336和338(如图5A和图5B中所示)和轴向传感器342。
在图12A至图12C中所示的示例中检测的轴向反射率值通常与在图10A至图10C中所示的示例中检测的轴向反射率值类似。因此,将不再参照图12A至12C说明轴向反射率值。能够的是在GI道内的某些位置中轴向传感器342可以检测由从径向传感器332、334、336和338之一产生的照明所引起的较大量的反射率。
图12A中,在位置“I”和“II”处由径向传感器332、334、336和338检测的径向反射率值将通常分别与由图10A和图11A中的可摄取设备300和302检测的径向反射率值类似。由径向传感器336和338检测的径向反射率值将依据胃452的宽度而变化。在位置“III”处,由径向传感器336和338检测的径向反射率值将与由径向传感器332检测的径向反射率类似。因此,从在位置“I”、“II”和“III”处采集的径向反射率值,处理模块可以确定可摄取设备304还没有进入小肠454,这是因为来自各种径向传感器332、334、336和338的径向反射率数据由于他们取决于胃452的内容物及其改变的方向而可能是不一致的值。
与图10A和图11A中所示的可摄取设备300和302的运送相似,在位置“IV”处采集的径向反射率值也将指示正发生幽门运送。在图12中所示的示例中,由于四个不同的径向传感器332、334、336和338处于可摄取设备304中,提供较大量的反射率值,并且因此,处理模块可以更加容易地确定正发生运送到小肠454。类似地,在图12B中的可摄取设备304通过小肠454的运送产生与图10B和11B的感测分单元130的配置类似的径向反射率值。然而,如上所述,可摄取设备304提供较大量的反射率值,并且因此提供更可靠的位置检测。
最终,如上所述,可摄取设备304通过大肠456的运送可以当照明处于可见光谱内时由于在大肠456中存在有主要为不透明的内容物而引起主要为内部的反射率,并且可以当照明是IR照明或绿色照明时由于棕色而引起较高反射率值。
在某些实施例中,感测分单元130可以包括温度传感器。温度传感器可以操作成随着可摄取设备10通过身体运送而采集温度数据系列。温度传感器可以在传感器32、42处于操作中的同时操作或者可以响应于由微控制器110或由外部设备(例如,基站)经由通信分单元120所提供的触发而操作。在某些实施例中,温度可以用于确定何时可摄取设备已经进入或离开胃肠道。例如,在可摄取设备从身体外部的环境进入胃时,由可摄取设备10测量的温度可以反映出接近于体温的值。类似地,在可摄取设备自然地离开身体时,由可摄取设备10测量的温度可以变化成环境室温。
在某些实施例中,温度值可以用于确定可摄取设备10的体内位置。胃452中的温度值可以由于会已经摄取的液体和/或食物而变化。例如,温度值的较大降低可以通常指示可摄取设备10仍然在胃452内。
再次参照图9A,在步骤530处,处理模块可以使用由感测分单元130所采集的反射率数据系列确定在可摄取设备10外部的环境的质量。反射率数据系列将包括轴向反射率数据系列和径向反射率数据系列,所述轴向反射率数据系列包括轴向反射率值,所述径向反射率数据系列包括径向反射率值。参照图13A至图13C说明示例性反射率数据系列。
GI道的不同的分段通常与不同的特征相关联。由于环境随可以存在或可以不存在的微粒414而变化,胃452内的环境的质量通常不一致。胃452中的较大空间也允许用于使微粒414和可摄取设备10恒速运动,这进一步增大了胃452的环境的可变性。另一方面,小肠454是更窄的空间,并且典型地包括一致的内容物类型。因此,小肠454可以与较为同质的质量相关联。与胃452类似,大肠456是比小肠454大的空间,并且因此允许用于使其内容物和可摄取设备10更加变速运动。
图13A是绘图600A,其示出在通过主体的GI道运送期间由图3A的可摄取设备300所采集的反射率数据系列。绘图600A的y轴被设置为表示反射率值的原始ADC值,并且绘图600A的x轴按照时间(小时)设置。绘图600A示出由径向传感器332所采集的径向反射率数据系列602A和由轴向传感器342所采集的轴向反射率数据系列604A。
在0至3小时之间或在运送期610A期间,径向反射率数据系列602A是尤其激进的。如参照图10A所述,可摄取设备300可能在运送期610A期间通过胃452运送,这是由于胃452为可摄取设备300的运动提供较大空间,并且因此所得到的反射率数据系列可能明显地变化。
在约3小时处或在运送点620A处,反射率数据系列的值降低。在3小时至约7小时之间或在运送期612A期间,反射率数据系列看来是较稳定的。在运送点620A处的反射率值降低,并且此后直到运送点622A为止反射率值是较为一致的,所述运送点622A通常指示小肠454内的运送。
通过健康成人的小肠454的运送时间长度是约四个小时。而且,如参照图10B所述,随着可摄取设备300通过幽门运送到小肠454,由可摄取设备300所采集的反射率数据系列在稳定性方面增大。尤其,由于可摄取设备300极为接近小肠454的壁,径向反射率数据系列602A随着可摄取设备300通过小肠454运送而可能包括持续较高的反射率值。
运送点622A是在可摄取设备300进入GI道之后的约7小时处。如在绘图600A中所示,在运送点622A处出现基本的峰值,并且此后反射率数据系列在运送期614A期间以近似增大的值持续下去。在可摄取设备300通过大肠456运送期间,如参照图10C所述,由于大肠456的内容物主要为不透明的棕色内容物,当照明在可见范围内时,轴向传感器342和径向传感器332可以检测主要为内部的反射率。因此,运送点622A可能指示运送到大肠456中。
图13B是另一个绘图600B,其示出在通过主体的GI道的另一个运送期间由图3A的可摄取设备300所采集的反射率数据系列。绘图600B示出由径向传感器332所采集的径向反射率数据系列602B和由轴向传感器342所采集的轴向反射率数据系列604B。
与绘图600A中所示的反射率数据系列类似,绘图600B示出在胃452与小肠454之间的运送点620B以及在小肠454与大肠456之间的运送点622B。通过小肠454的运送期612B是约四个小时,这对于健康成人而言是典型的。然而,通过胃452的运送期610B基本久于运送期610A。运送期610A和610B之间的变化可以视各种因素而定,所述各种因素例如但不限于,是否个人在摄取设备300和其它可能事件之前充分地禁食。
图13C示出又一个绘图600C,其示出在通过主体的GI道的又一个运送期间由图3A的可摄取设备300所采集的反射率数据系列。绘图600C示出由径向传感器332所采集的径向反射率数据系列602C和由轴向传感器342所采集的轴向反射率数据系列604C。与绘图600A和600B不同,绘图600C还包括温度数据系列606。
如图所示,约在2.5小时处(在运送点620C处),温度数据系列606中的温度略微升高,并且对于运送期612C和614C中的大部分而言被维持在升高的温度处。在运送点620C处的温度升高可以指示从胃452运送到小肠454。
在示例性绘图600A至600C中所示的反射率数据系列被设置为原始ADC值。如图6A至图6C中所示,对于处理模块而言能够基于原始ADC值大致识别出GI道内的运送点620、622。在某些实施例中,当确定在可摄取设备10外部的环境的质量时,处理模块可以分析原始ADC值,以便推断出可摄取设备10的体内位置。参照图9B说明确定在可摄取设备10外部的环境的质量的示例性方法550。
将应理解,包括图9B在内的本公开的流程图的步骤和描述仅仅是说明性的。在不脱离本公开的范围的情况下,包括图9B在内的流程图的步骤和描述中的任一个可以被修改、被省略、被重新布置、被轮流或并行执行,步骤中的两个或更多个可以被组合,或者任何额外的步骤可以被添加。例如,在某些实施例中,可摄取设备可以同时地计算标准偏差和平均值以加速总计算时间。此外,应当注意到,图9B的步骤和描述可以与本申请中所述的任何其它系统、设备或方法组合,并且本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图9B中的步骤中的一个或多个。
为了推断出可摄取设备10的体内位置,在步骤560处,处理模块可以确定用于轴向反射率数据系列604和径向反射率数据系列602中的每个的标准偏差。
典型地,由于胃452的变化的环境,轴向标准偏差值和径向标准偏差值是较高的。轴向标准偏差值和径向标准偏差值由于小肠454的更为同质的环境随着可摄取设备10通过幽门运送到小肠454中而降低。为了识别出胃452与小肠454之间的运送点620,处理模块可以判定是否轴向标准偏差值和径向标准偏差值中的每个都满足偏差阈值。当轴向标准偏差值和径向标准偏差值中的每个都等于或小于偏差阈值时,轴向标准偏差值和径向标准偏差值中的每个都可以满足偏差阈值。
偏差阈值可以包括用于轴向反射率数据系列和径向反射率数据系列的不同的值或用于轴向反射率数据系列和径向反射率数据系列的相同的值。偏差阈值是这样的值,即,所述值可以用于指示数据系列的相应的部分的标准偏差已经达到表示小肠454的环境的水平。当可摄取设备10被第一次启动时,偏差阈值可以依据各种因素变化,例如,用于解决个人的一些特征或要求。偏差阈值可以被预定和/或可以在使用期间基于由感测分单元130经过预定的时间段所采集的反射率数据而变化。
在某些实施例中,可以在使用期间基于反射率数据中的某些而调节偏差阈值。例如,对于在预定的时间段期间所采集的反射率数据可以确定平均数。当所确定的平均数指示反射率数据值通常低于期望的值时,处理模块可以相应地减小偏差阈值以适应较低的反射率数据值。类似地,当所确定的平均数指示反射率数据值通常高于期望的值时,处理模块可以相应地增大偏差阈值以适应较高的反射率数据值。
当在步骤562处处理模块确定轴向标准偏差值和径向标准偏差值二者满足偏差阈值时,处理模块可以指示可摄取设备10的外部环境的质量是同质的(在步骤处582),并且因而可摄取设备10可能已经到达小肠454中。否则,处理模块可以指示可摄取设备10不太可能处于同质的环境中(在580处)。在某些实施例中,在步骤564处,处理模块可以进一步核实在步骤562处的确定并且在确定外部环境的质量之前在步骤566处产生用于反射率数据系列的部分的平均值以进一步核实在步骤562处的确定。
在某些实施例中,可以实施轴向标准偏差值和径向标准偏差值之间的比较。为了便于比较,处理模块可以使用相对应的反射率数据值的平均数来调节轴向标准偏差值和径向标准偏差值。
虽然确定轴向标准偏差值和径向标准偏差值满足偏差阈值可能指运送到小肠454中(在582步骤处),但是会有这样的应用,即,在所述应用中可摄取设备10的位置的准确度可以是显著的。例如,当可摄取设备10操作成具体地从小肠454采集样本时,可摄取设备10应当在任何样本采集之前处于小肠454内,这尤其是因为在可摄取设备10中有有限的用于接收样本的空间。
为了核实体内位置,处理模块可以将轴向反射率数据系列的部分与径向反射率数据系列的部分比较。例如,在步骤566处,对于轴向反射率数据系列的部分可以产生平均值以获取轴向平均数,并且对于径向反射率数据系列可以产生另一个平均值以获取径向平均数。如参照至少图10B和图13A所述,与轴向反射率值比较起来,由于较大的吸光,径向反射率值通常随着可摄取设备通过小肠454运送而显著地降低。因此,当可摄取设备10处于小肠454内时,径向平均值应当小于轴向平均值。在某些实施例中,当在步骤568处径向平均值被确定为比轴向平均值小了最小差值时,处理模块可以指示外部环境的质量为同质的(在步骤582处)。否则,处理模块可以指示可摄取设备10不太可能处于同质的环境中(在580处)。
与偏差阈值类似,当可摄取设备10被第一次启动时,最小差值对于各种因素可以变化,例如,用于呈送个人的一些特征或要求。最小差值可以被预定和/或可以在使用期间基于在运送期间所采集的数据而变化。
在某些实施例中,处理模块可以基于所采集的反射率数据的总和和/或基于轴向反射率数据系列和/或径向反射率数据系列的总和的绝对值改变最小差值。
用于比较所选的反射率值的部分还可以变化。在某些实施例中,在基于标准偏差值最初检测运送点620之后,处理模块可以在运送点620之后选择多个反射率值。在某些实施例中,多个反射率值可以在使用期间基于在运送期间所采集的数据被调节。
在某些实施例中,多个反射率值可以基于总轴向标准偏差(所述总轴向标准偏差是轴向标准偏差值的总和)和总径向标准偏差(所述总径向标准偏差是径向标准偏差值的总和)被调节。例如,当总轴向标准偏差和径向标准偏差二者小于可检测的偏差阈值时,多个反射率值可以减小,这是由于总轴向标准偏差和径向标准偏差当低于可检测的偏差阈值时可以被认为是可忽略的。可检测的偏差阈值通常指示反射率值中的偏差的最低水平,其对于可摄取设备10而言可以改变体内位置的确定。
如参照图13C所述,感测分单元130还可以包括用于采集温度值的温度传感器。在某些实施例中,温度传感器可以被设置在可摄取设备10的微控制器110处。
所采集的温度值可以被处理模块使用以在步骤570和步骤572处进一步核实体内位置。由于胃452内的温度比小肠454内的温度更为多变,温度中的任何明显变化可以指示可摄取设备10还没有进入小肠454。例如,处理模块可以指示超过温度阈值的温度变化,如在步骤572处所确定,所述温度变化可以是值中的最大可允许变化,其指示环境是不同质的(在步骤580处)并且可摄取设备10不在小肠454中。温度值还可以指示进入身体中(例如,温度可能在进入身体中时升高身体)和/或从身体离开(例如,温度可能在从身体离开时降低)。
在某些实施例中,温度值可以用在用于生物钟的温度校正中以改进时间准确度。温度值可以使用查找表或公式被判定是否在微控制器110的每个苏醒周期处所记录的时间在可摄取设备10的使用期间由于变化的温度而应当被校正。
在某些实施例中,当不被使用(例如,在身体外部)时,温度传感器可以从周围环境检测温度值以指示可摄取设备10的存储条件。
再次参照图9A,在步骤540处,处理模块可以基于在步骤530处所确定的外部环境的质量而识别出可摄取设备10的位置。
GI道的不同的分段与不同的特征相关联。因此,处理模块可以使用从本文所述的可摄取设备10的外部环境所采集的数据识别出体内位置。例如,小肠454由于受限的结构和一致的内容物典型地与更为同质的环境相关联。因此,当外部环境的质量被确定为同质的时,处理模块可以指示可摄取设备10的体内位置可能是小肠454。
借助诸如方法500的本文所述的位置检测方法,例如,可摄取设备10的体内位置可以在较高的准确度下被识别出。结果,可摄取设备10可以对何时实施一些任务具有更大的控制。
将应理解,包括图9A在内的本公开的流程图的步骤和描述仅仅是说明性的。在不脱离本公开的范围的情况下,包括图9A在内的流程图的步骤和描述中的任一个可以被修改、被省略、被重新布置、被轮流或并行执行,步骤中的两个或更多个可以被组合,或者任何额外的步骤可以被添加。例如,在某些实施例中,可摄取设备可以开始使用现有的数据确定环境的质量,而同时地操作轴向感测分单元和径向感测分单元以收集新数据。此外,应当注意到,图9A的步骤和描述可以与本申请中所述的任何其它系统、设备或方法组合,并且本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图9A中的步骤中的一个或多个。
如上所述,诸如可摄取设备10、300、302、304、306和308的本文所述的可摄取设备中的任一个可以用于不同的任务。在某些情况下,可摄取设备10可以用于从GI道的内容物采集可用的样本(例如,100μL大小的样本),并且维持每个样本彼此隔离,直到样本被提取为止。在某些实施例中,可摄取设备10可以用于以可控的方式将物质释放到身体内。在这种情况下,在将可摄取设备10引入到身体中之前,在可摄取设备10中的至少一个室可以装载有液体形式或干粉末形式的物质。
在某些实施例中,用于识别出身体的GI道内的位置的可摄取设备(例如,可摄取设备700)包含有药剂和用于可控地施用药剂以用于治疗疾病的装置,所述药剂包括治疗剂。在某些方面中,用于可控施用的装置可以包括控制装置,所述控制装置用于根据如由本文提供的方法所确定的、在胃肠道中的设备的位置将药剂分配到GI道的特定区域。例如,就回肠结肠炎而言,将药剂分配在发炎部位例如回肠处的最常见的一种克隆氏症将可容易用于发炎的病变组织,而同时使体循环中的浓度最小化。结果,用于递送药剂的可摄取设备可以降低潜在的副作用。类似的方法可以用于在局部递送提供益处的情况下治疗其它GI疾病。例如,胃肠道肿瘤的治疗或乳糜泻的治疗可以被有效地作为目标。
在某些实施例中,用于识别出身体的GI道内的位置的可摄取设备(例如,可摄取设备10、300、302、304、306和700)采集关于从GI道中的一个位置运送到另一个位置的数据(例如,运送时间)。例如,该设备可以测量通过GI道的不同区域例如胃、小肠和大肠的运送时间。这种运送时间可以用于检测运动性的病理状态,例如,胃轻瘫和慢传输型便秘。通过认出特定的解剖位置和通过如本文所述确定运送时间,该设备提供一种测量整个肠道运送时间(WGTT)、胃排空时间(GET)、小肠运送时间(SBTT)和结肠运送时间(CTT)的准确方法。在某些实施例中,如与依靠pH或成像数据确定位置的可摄取设备比较,这会引起大量的额外知识。
在某些实施例中,可摄取设备10可以配置成在将一种或多种物质释放到身体中(就多种试剂而言按预定的顺序)之后采集样本,并且可摄取设备10可以继而从身体采集所引起的实体样本。例如,可以在采集样本之前抑制酶和化学过程的物质可以被释放到身体中(例如,用于防止所采集的样本的潜在退化,以便获取采集样本的环境的“抓拍(snap-shot)”)。
参照图14A、图14B和图15说明示例性可摄取设备700,其配置成独立自主地实施本文所述的位置检测方法并且运载物质。如可以从图14A、图14B和图15看到,可摄取设备700的一些部件与可摄取设备10的部件(例如,参见图1A、图1B和图2A)相对应。因此,在可摄取设备10和700中类似的部件将不再说明。
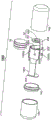
图14A和图14B分别示出可摄取设备700的分解图700A和剖视图700B。可摄取设备700以与可摄取设备10类似的方式配置,但是可摄取设备700配置成存储物质(例如,样本、试剂、药剂或治疗剂)。与可摄取设备10类似,可摄取设备700包括电池18和PCB 30。PCB 30至少具有嵌入其上的轴向感测分单元42和径向感测分单元32。电池18和PCB 30由第一壁部分14a和第一端部部分16a封装。然而,与可摄取设备10不同,可摄取设备700包括马达704和存储分单元702,所述马达704和存储分单元702由第二壁部分714b和第二端部部分716b封装,所述第二端部部分716b配置成接收马达704的端部。第二壁部分714b还可以充当室封壳。
存储分单元702包括用于存储物质的室,例如,706。可以在运送期间作为样本从身体采集物质,并且/或者物质在运送期间释放到身体。在某些情况下,物质可以在使用之前被装载到可摄取医疗设备700中,以便使物质可以在运送期间释放在身体中。在第二壁部分714b上设置有接入端口718以适应物质进入室706中或物质从室706离开。第二壁部分714b可以被称为室封壳。
室706沿着圆筒状存储分单元702的长度是大致长矩形的凹槽。然而,将应理解,室706可以采取任何形状,并且形状可以依据可摄取设备700的预期应用变化。室706中的每个都可以彼此隔离,以便使一种或多种离散的物质可以被存储以防在操作期间取样或在使用之前被存储以用于在操作期间释放。通常,室706中的每个都具有尺寸规格以存储可用的样本尺寸,例如,约100μL的容量,例如。
每个室706都具有相对应的室开口708。室开口708可以跨越约60°的弧度。因此,可以在存储分单元702上的室开口708中的每个之间设置有未凹陷的区域(例如,每个都具有约60°的跨度)。在某些实施例中,室开口708和相对应的室706围绕存储分单元702的圆周不均匀地分布。例如,当对于可摄取设备700不期望在物质的每次采集或释放之间停顿时,室开口708和相对应的室706可以较靠近地布置在一起。在某些实施例中,室开口708可以跨越具有不同的圆周范围的弧度。
如上所述,存储分单元702中的室706可以用于存储从GI道采集的样本和/或存储用于释放到GI道中的物质。因此,室开口708和接入端口718二者足够大以适应物质通过蠕动运动而运动进或出室706。
参照图15进一步说明的存储分单元702的操作。
与可摄取设备10类似,连接壁部分14c可以将第一壁部分14a与第二壁部分714b连接。外壳712由第一端部部分16a、第二端部部分716b和径向壁14形成,所述径向壁14由所第一壁部分14a、连接壁部分14c和第二壁部分714b形成。如图14B中所示,径向壁714从第一端部部分16a延伸到第二端部部分716b。
由于存储分单元702和马达704,轴向感测分单元42被限于位于第一端部部分16a近侧的轴向传感器。然而,径向感测分单元32可以包括如本文所述的任何数量的径向传感器。例如,可摄取设备700可以包括径向感测分单元32,其以与如图5A、图4A和图8A中所示的方式类似的方式配置。
而且,存储分单元702和室封壳714b可以不同地配置。例如,存储分单元702可以反而转动,并且室封壳714b可以固定不动。可以使用存储分单元702和室封壳714b的其它实施例。
图15是可以用于图14A的可摄取设备700的电气部件的示例性实施例的框图750。
存储器分单元140、电源160和感测分单元130可以以与用于可摄取设备10和700二者的方式类似的方式操作。
可摄取设备700中的通信分单元720与可摄取设备10相似包括光编码器20,并且通信分单元720还包括RF收发器722。对于可摄取设备10能够也包括RF收发器722以用于实施与外部处理模块的无线通信。
RF收发器722可以被考虑为微控制器710的外围设备。因此,微控制器710可以通过发送RF收发器722数据以及针对可摄取设备700的操作的数据而开启RF通信,所述RF收发器722数据指定通道、以及功率、频率和用于RF通信的其它参数,在所述通道上RF收发器722将传输。
在某些实施例中,可摄取设备700中的RF收发器722可以在采集物质和/或释放物质期间促进实时遥测。例如,RF收发器722可以将与可摄取设备700的操作和/或所采集的样本相关联的数据实时地传输到基站。
微控制器710可以使用与微控制器110类似的处理来设置。然而,可摄取设备700中的微控制器710将配置成处理附加功能,例如,由马达控制分单元740和定位分单元730所提供的那些。
对于可摄取设备700操作的时间的大部分而言,微控制器710可能仅是从电源160抽取功率的部件。当微控制器710不使用时,其它部件中的大部分可以掉电。
定位分单元730和微控制器710可以一起操作以确定接入端口718相对于室开口708中的每个的位置。定位分单元730可以包括磁传感器或传感器。
当磁传感器用于确定接入端口718的位置时,在可摄取设备700中也包括编码磁体装置734。随着编码磁体装置734中的磁体越过磁传感器转动,磁传感器感测磁体并且产生相对应的定位信号,所述定位信号依据特定的实施方案可以是准正弦波或方波。
马达控制分单元740包括马达驱动器742和马达704。马达驱动器742可以是双重全桥驱动器,其包括DPDT开关和保护电路,所述保护电路以单独整体式包括电阻-二极管组合。
当马达704接收动力时,它将把室封壳714b转动了与所接收的动力相对应的距离。由于编码磁体装置734被嵌入室封壳714b中,编码磁体装置734随室封壳714b一起转动。当磁体越过磁传感器转动时,磁传感器从磁体感测变化的磁感应强度并且将该信息编码在定位信号中,所述定位信号继而通过A/D转换器116被发送到微控制器710。
与微控制器710不同,在某些方面中,马达704可以具有较高的放电容量。例如,在3V操作电压下,6mm呼机齿轮马达可以当空载时抽取120mA的电流并且当失速时抽取230mA的电流。将应理解,6mm马达仅仅是可以用在可摄取设备700中的马达的示例,并且可以使用具有类似的操作特征和不同的尺寸的其它类型的马达。
电源160会需要供应较高的能量密度并且按要求放出较高的电流(例如,以便在短暂的时间段上放出较高水平的电流)。这种电源的示例可以是多个氧化银电池(例如,两个30mAh电池,所述两个30mAh电池中的每个都在1.55V下操作,总计组合的3.1V)。氧化银化学提供较高的能量密度并且可以按要求放出足够的电流(例如,150毫库仑/秒,最大为250毫库仑/秒)。氧化银化学的较高能量密度也指示氧化银电池具有较长的电池寿命,约5%/yr的较低自放电率。使用氧化银化学所形成的电池还可以具有紧凑的形式,并且这种形式作为标准钮扣电池形成因素而存在。拥有较高的能量密度、较久的寿命和较高的要求放电率的其它示例性电池化学可以包括锂聚合物。
马达704联接到微控制器710以用于从电源160接收功率。马达704可以经由控制电路联接到微控制器710。马达704可以继而围绕存储分单元702转动室封壳714b。通常,马达704被实施成使得其在没有外部齿轮传动装置的情况下提供较高的转矩。在某些实施例中,马达704可以是微型DC马达。在某些实施例中,DC马达可以是无刷的。例如,可以使用具有700:1减速行星齿轮传动装置的微型DC马达(例如,如由Precision Microdrive制造)。700:1减速行星齿轮传动装置通常在转矩方面提供成比例增大并且在每分钟转数(RPM)方面提供减小。
如图14B中所示,两个同心层围绕围绕马达704形成。为了使可摄取设备700内的空间最大化,存储分单元702和室封壳714b被构建成围绕马达704同中心地配合。围绕马达704的第一层是存储分单元702,并且围绕马达704的第二层是室封壳714b。
现在参照图16,其中示出的是操作可摄取设备700的示例性方法800的流程图。
在步骤810处,可摄取设备700被激活。可摄取设备700可以通过激活磁开关162而被激活。例如,可摄取设备700可以从磁场去除以将磁开关162切换到ON'位置。电流可以继而流过可摄取设备700中的电气通路(例如,在PCB 30上的通路)。
响应于可摄取设备700被激活,微控制器710可以开始检测外围部件和/或设备和使其初始化。微控制器710可以通过通用I/O 112通过将一系列请求发送到与通用I/O 112相关联的特定地址而检测例如是否一个或多个外围设备存在于总线上。作为响应,所存在的任何外围设备继而将确认信号发送到微控制器710。如果微控制器710在指定的时间框架内没有接收到响应,则微控制器710操作成就好像不存在外围设备一样。指定的时间框架可以变化。示例性时间框架可以是20秒。微控制器710继而使所存在的外围设备初始化。初始化处理可以随不同的外围设备而变化。
在微控制器710使外围设备初始化之后,微控制器710通常将外围设备放置在低能状态中,或可以甚至完全地使具有非易失性存储器的外围设备掉电,以便避免不必要的耗电。
在步骤820处,微控制器710接收用于可摄取设备700的操作指令。
在使外围设备初始化之后,对于来自基站的起始信号,微控制器710可以轮询通信分单元720,例如,RF收发器722。该起始信号可以通常后面跟着来自基站的操作指令。起始信号和操作指令可以依据可摄取设备700的特定实施方案通过IR或RF传输被无线地提供。
基站可以包括基座,所述基座充当外部计算机的外围设备并且可以使用SPI协议通过外部计算机的COM端口与外部计算机通信。在某些实施例中,基站包括微控制器和收发器,所述微控制器例如是用于识别出本文所述的可摄取设备的体内位置的处理模块。收发器被选择成促进可摄取设备700与基站之间的通信。
现在参照图17A至图17C,其中示出的是基站950的示例性实施例的不同的视图。
基站950包括编程和充电基座952、在顶面950t处的磁化区域960和在正面950f处的通用串行总线(USB)连接端口962。磁化区域960可以用于触发磁开关162。当磁开关162被激活时,磁开关162可以重置微控制器110,以便使微控制器110继续激活可摄取设备700。在被微控制器110激活之后,可摄取设备700可以与编程和充电基座952接合以接收操作指令。操作指令可以经由USB连接端口962或无线地被接收。
在某些实施例中,基站950还可以包括室接合基座以用于从可摄取设备700检索样本或将物质插入可摄取设备700中。
在某些实施例中,基站950可以包括LED以用于指示编程和充电基座952的状态以及从外部计算机接收的某些命令。例如,当提取物质或将物质插入可摄取设备700中时,LED可以用于指示紧急停止和来自计算机的覆盖命令。
编程和充电基座952可以包括一个或多个电触头以用于连接到PCB 30上的编程和充电连接器。电源160还可以通过编程和充电基座952上的电触头充电。将应理解,对于不同的应用而言,电触头的数量可以改变。
虽然图17A中示出编程和充电基座952,但是应当理解,在某些实施例中,可以有用于对可摄取设备700充电的充电基座和用于对可摄取设备编程的单独的编程部件。编程部件可以是无线电收发器或红外(IR)收发器。例如,IR收发器可以使用已调制的红外光(例如,介于波长阶段850nm至930nm)操作。无线收发器可以依据在基站950处的收发器的特定类型使用ZigbeeTM协议或ANTTM协议操作。
USB连接端口962可以经由USB数据线连接到外部计算设备。外部计算设备可以是台式电脑、笔记本电脑、平板电脑和类似物。可以经由外部计算设备提供图形用户界面以能够通过管理员与可摄取设备700互动。互动可以包括各种不同的操作,例如,数据传送、控制通信和其它类似的功能。
操作指令可以包括识别操作模式(例如,任务类型,例如,采集样本和/或释放物质)的数据、操作参数(例如,取样时间、取样间隔、错误日志和取样位置)、用于管理可摄取设备700中的外围设备的参数和与执行关于个人摄取可摄取设备700的特定测试或治疗程序相关联的操作参数。
现在参照图18A至图18C,其中分别示出的是用于与可摄取设备700互动的用户界面900、932和942的示例性实施例的截屏。将应理解,类似的界面900、932和942可以用于与可摄取设备10、300、302、304、306和308互动,但是可以提供不同的功能性,这是由于可摄取设备10、300、302、304、306和308不包括存储分单元702。例如,用于与可摄取设备10、300、302、304、306和308互动的用户界面可以包括对感测分单元130的附加控制并且可以未必包括对存储分单元702的操作的控制。
图18A示出用于配置可摄取设备700的主用户界面900。如图所示,主用户界面900包括状态部件910、通信部件920、数据检索部件922、编程定义部件930和马达控制部件940。
状态部件910可以显示与可摄取设备700的操作状态相对应的信息。例如,操作状态可以包括在可摄取设备700上的外围部件的状态、电源160的电池状态916和/或由感测分单元130检测的测量值914。还可以显示实时的体内位置912。
使用通信部件920,管理员可以选取通信端口并且开始与所选通信端口连接。管理员还可以开始从可摄取设备700(例如从内存存储部件142)经由数据检索部件922检索数据。
编程定义部件930可以提供图18B中所示的程序界面932。程序界面932可以提供用于限定样本采集算法的样本采集控制934和用于限定数据采集算法的数据采集控制936。在图18B中所示的示例中,样本采集控制934包括三个样本采集定义934(a)、934(b)和934(c)。
在第一样本采集定义934(a)中,可摄取设备700在检测到进入胃中之后60分钟采集第一样本,并且可摄取设备700暴露室开口708达10分钟。在第二样本采集定义934(b)中,可摄取设备700在检测到进入小肠454(十二指肠)中之后六十分钟采集第二样本,并且可摄取设备700暴露室开口708达十分钟。在第三样本采集定义934(c)中,示出已经禁止取样。
在该示例中,数据采集控制936指示在可摄取设备700被摄取之后立即采集反射率数据。反射率数据可以每15秒被记录,而不是不断地被记录。这帮助减少所采集的且随后被处理的数据的量,这还可以减少在操作期间从电池18需要的能量。
再次参照图18A,马达控制部件940可以提供图18C中所示的马达控制接口942。可以在马达控制接口942中示出室706的配置。在所示的示例中,可摄取设备700具有三个室,即,706(a)至706(c)。还可以提供这样控制,即,例如,运动类型控制946和相对应的脉冲持续时间控制944。
微控制器710可以判定是否操作指令被成功地接收。如果是这样的话,则微控制器710继续根据在步骤830处的操作指令对可摄取设备700编程和使可摄取设备700初始化。如果不是这样的话,则微控制器710可以请求再发送操作指令。
再次参照图16,在步骤840处,可摄取设备700被个人摄取。
在被摄取之后,微控制器710可以在预定的等待时期内将可摄取设备700置于低能状态(例如,睡眠状态)中。在该时间期间,RF收发器722可以被间歇性地开启以轮询来自基站950的新指令(例如,新指令覆盖先前接收到的指令)和/或将数据传输到基站950。在某些实施例中,所述置于低能状态中可以包括在预定的时间段内禁用或停用设备的功能。例如,关闭个别的传感器、编码器、对数字转换器的模拟、整个分单元(例如,通信分单元120(图2A)或感测分单元130(图2A))和类似物可以保存能量和避免消耗电池18。在某些实施例中,预定的等待时期可以是被编程到存储器中的预定的时间段(例如,内存存储部件142)。例如,这可以被设定为制造过程的一部分或被设定为由基站所编程的一部分。
预定的等待时期可以被设置为操作指令的一部分。例如,如在图18C的数据采集控制936中所指示,微控制器710可以在摄取可摄取设备700之后立即或在自从摄取可摄取设备700已经经过一定量的时间之后(例如,为了使可摄取设备700可以有时间行进到个人的身体内的靶位置)使可摄取设备700的操作初始化。
例如,一旦已经经过预定的等待时期,或者如果没有预定的等待时期,微控制器710可以开启感测分单元130以在步骤850处从外部环境检测反射率来根据本文所述的各种方法例如方法500识别出可摄取设备700的体内位置。
在步骤860处,微控制器710判定是否可摄取设备700已经到达靶位置,所述靶位置如在例如来自样本采集控制934的操作指令中所识别出,例如。如果微控制器710确定可摄取设备700还没有到达靶位置,则微控制器710返回到步骤850。
响应于可摄取设备700已经到达靶位置的检测,在步骤870处,微控制器710可以根据操作指令使可摄取设备700的操作初始化。
例如,根据样本采集定义934(a),可摄取设备700在检测到进入胃中之后采集样本。因此,响应于处理模块基于根据本文所述的方法由感测分单元130所采集的反射率数据而指示到达胃中,微控制器710开始采集第一样本。
在可摄取设备700完成与样本采集定义934(a)相关联的任务之后,微控制器710在步骤880处判定是否所有操作指令已经完成。
如果操作指令还没有完成,则微控制器710返回到步骤850。例如,在可摄取设备700采集第一样本之后,微控制器710可以根据操作指令继续采集剩余的样本。关于第二样本,响应于处理模块根据样本采集定义934(b)指示到达小肠454中(在步骤860处),微控制器710将开始采集第二样本。在可摄取设备700采集第二样本之后,微控制器710将返回到步骤850。
如果操作指令已经完成或者可摄取设备不能继续其操作,则可摄取设备700可以被检索(在步骤890处)。微控制器710可以将所有外围设备置于低能状态中以节约用电。
在检索之后,可摄取设备700可以依据其编程的任务经受进一步分析。例如,如果可摄取设备700被编程以用于从个人采集样本,则可摄取设备700可以被检索成使得其所采集的样本被进一步分析。通常,可摄取设备700中的样本可以通过手动移液或另一种适当的技术被提取,所述另一种适当的技术可以是自动化的,如由本领域的技术人员已知的。所提取的样本可以利用各种技术分析,所述各种技术例如,但不限于,生化分析,例如。
将应理解,包括图16在内的本公开的流程图的步骤和描述仅仅是说明性的。在不脱离本公开的范围的情况下,包括图16在内的流程图的步骤和描述中的任一个可以被修改、被省略、被重新布置、被轮流或并行执行,步骤中的两个或更多个可以被组合,或者任何额外的步骤可以被添加。例如,可摄取设备可以在制造过程期间设有默认编程,或者操作指令可以在激活之前被编码到设备上。此外,应当注意到,图16的步骤和描述可以与本申请中所述的任何其它系统、设备或方法组合,并且本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图16中的步骤中的一个或多个。
现在参照图19,其中示出的是可摄取设备1900的另一个示例性实施例的视图。与其它可摄取设备(例如,可摄取设备10、300、302、304、306、700和2500)类似,可摄取设备1900可以用于识别出在胃肠道内的位置。可摄取设备1900的实施例配置成通过利用借助不同波长的光操作的传感器独立自主地判定是位于胃中、位于小肠中还是位于大肠中。另外地,可摄取设备1900可以辨别出是否位于小肠或大肠的某些部分内,例如,十二指肠、空肠或盲肠。
可摄取设备1900可以具有与在本申请中所讨论的其它可摄取设备(例如,可摄取设备10、300、302、304、306、700和2500)相同的总体形状和构造,并且将显而易见的是涉及可摄取设备1900的公开内容可以与涉及在本申请中所讨论的任何其它可摄取设备的公开内容组合。例如,在可摄取设备1900的某些实施例中可以使用关于可摄取设备10、300、302、304、306、700和2500所述的个别类型的传感器配置、材料、设备外壳、电子器件、功能和检测算法。
例如,可摄取设备1900可以具有外壳,所述外壳包括第一端部部分14a、第二端部部分14b和连接壁部分14c,与可摄取设备10基本类似。可摄取设备1900还可以利用类似的电气系统或部件,如关于可摄取设备10所讨论的那些。可摄取设备1900采用感测阵列,所述感测阵列由感测分单元构造,所述感测阵列包括照明器1906a和1906b和检测器1904。虽然在附图中未示出其全部,可摄取设备1900具有围绕PCB 1902的圆周布置的三套径向照明器和检测器。在某些实施例中,可以使用其它数量或配置的感测单元。可摄取设备1900还可以具有在PCB 1902的轴向端部处的顶部轴向感测分单元42。通常,PCB 1902可以与在本申请中所讨论的其它电路类似地制成和构造,并且利用与其它设备类似的PCB分段的类型(例如,PCB分段202和204),在照明器和检测器位置中略微有变化。虽然不可见,但是可摄取设备1900还可以包括位于PCB 1902的PCB分段204上的底部轴向感测分单元,其与顶部轴向感测分单元基本相对。
图20是可摄取设备的简化的俯视图和侧视图,其示出示例性照明器或检测器位置。图20可以与任何数量的可摄取设备相对应,但是为了说明的目的,我们将涉及可摄取设备1900。如图所示的可摄取设备1900的特征在于传感器阵列,所述传感器阵列被示出为包括三个径向检测器2002a、2002b和2002c,连同产生照明的三个径向照明器2004a、2004b和2004c一起。在图8A中示出类似配置的检测器和照明器。每个径向照明器和径向传感器都沿着可摄取设备1900的圆周均匀地间隔开约60度。该定位已经发现由于可摄取设备1900的外壳而减少来自照明器的内部反射。然而,在某些实施例中,照明器和检测器的其它布置可以用于类似的效果,例如,由可摄取设备10、300、302、304和306所描述的布置。
径向照明器2004a、2004b和2004c能够产生多个不同波长的照明,并且在可摄取设备1900的某些实施例中,它们可以通过使用红-绿-蓝发光二极管包(RGB-LED)来实施。这些类型的RGB-LED包能够传输红色、蓝色或绿色照明。可摄取设备1900的径向照明器2004a、2004b和2004c每个都配置成同时地传输特定的波长,从设备沿着多个不同的径向方向发送照明。例如,当可摄取设备1900配置成传输红光时,全部三个径向照明器可以同时地传输红光。基于在可摄取设备1900周围的环境,光的部分可以从环境反射,并且所得到的反射率可以由径向传感器2002a、2002b和2002c检测。
与关于可摄取设备10所讨论的传感器类似,径向传感器2002a、2002b和2002c可以包括光检测器,其将所接收的光转化成电信号。该信号可以继而被传输到模拟-数字转换器(ADC),并且所得到的数字信号可以通过处理器或微控制器(例如,位于PCB 30上的微控制器110)操纵。
在某些实施例中,径向照明器可以每个都传输不同波长的光,或者它们可以被操作成在不同的时间下传输光。例如,对径向照明器中的每个独立地操作可以允许设备检测关于位于设备的特定侧处的环境的特征。
图20还示出一对轴向检测器2006a和2006b和一对轴向照明器2008a和2008b,它们可以在可摄取设备的基本相对的端部处被包含在可摄取设备的某些变型上。这些轴向检测器和轴向照明器可以以与参照可摄取设备10的轴向感测分单元42所述的轴向照明器42i和轴向检测器42d的方式类似的方式设置。轴向照明器2008a和2008b被操作成沿着基本相反的方向传输照明。在某些实施例中,轴向照明器2008a和2008b配置成传输在红外光谱中的照明,但是在某些实施例中,可以使用其它波长的光,例如,包含有覆盖全部可见光谱的波长范围的白光。
与径向照明器2004a、2004b和2004c类似,轴向照明器2008a和2008b可以配置成同时地传输光,但是在某些实施例中,它们可以适于传输不同的波长的光或者在不同的时间下或以交替的方式传输光。依据在可摄取设备1900周围的环境,由轴向照明器2008a和2008b传输的照明的部分可以由位于设备上的各种检测器例如轴向检测器2006a和2006b检测。
在可摄取设备1900通过胃肠道运送期间,可摄取设备1900配置成周期性地得到传感器数据集。这通过按预定的顺序闪现不同类型的照明并且通过获取用于每次闪现的反射率数据来实现。每次得到传感器数据,可摄取设备1900可以首先传输信号以从照明器2004a、2004b和2004c传输红色照明并且从检测器2002a、2002b、2002c检测所得到的反射率。在反射率中所检测的光量继而被量化(例如,通过使用模拟-数字转换器116)并且被存储在可摄取设备内的存储器中。可摄取设备1900可以继而对蓝色照明和绿色照明重复该处理。在某些实施例中,可摄取设备可以通过以下步骤完成数据集,即,从轴向照明器(例如,轴向照明器2008a和2008b)传输白色照明或红外照明,使用轴向或径向检测器(例如,轴向检测器2006a和2006b)检测所得到的反射率,量化数据并且将其存储在设备存储器内。在某些实施例中,其它类型的温度、pH、电压或其它传感器可以被设置到可摄取设备,并且还可以在传感器数据集中包含有这些传感器输出的测量值。
图21示出在设备的某些实施例中所使用的光的波长以及如何不同的波长的光可以根据某些实施例与在可摄取设备周围的环境相互作用。随着可摄取设备(例如,可摄取设备1900)通过胃肠道运送,胃肠道的每个部分都将具有不同的环境,所述不同的环境对于不同的波长的光而言具有不同的吸收和反射特性。例如,胃的特征典型地在于水、偶尔的微粒、松弛的组织接触和自然生成的黏液的混合物。相比之下,小肠的特征在于具有更加限制的环境,可摄取设备开始与平滑肌紧密接触,并且结肠的特征可以是不透明的棕色粪便物。这些不同的环境会导致由可摄取设备上的各种传感器所检测的照明的绝对值变化,并且还会从不同波长的光导致发散的信号。
通过提供至少两个波长的光,可摄取设备1900也能够降低由于病人与病人之间的变化引起的检测的反射率中的变化。在某些方面中,通过一起比较来自多个波长的光的响应水平而不是查询绝对水平的变化,可摄取设备1900还可以考虑到制造可变性的影响(例如,套管不透明度,光感受器响应,安装距离)以及电池电压水平中的波动。
在本技术领域中已知的是对于含有较高脂肪和/或水的组织而言吸光值在高于约600nm和以上的波长从普通的组织(参见“Optical properties of biological tissues:areview”物理学,医学杂志,第27辑,第2卷,第149页至第52页,2013年11月)发散。另外地,也观察到吸光从~575nm急剧下降至~700nm(即,接近于红色光谱的光)(参见id.)。通过使用两个不同的波长的具有基本不同的吸收特性的照明,如本文所公开的,能够辨别出何时在设备周围的环境由生物组织组成。例如,图表2100示出蓝色照明2106、绿色照明2108、红色照明2110和红外光照明2112的不同的吸收特性,与由设备的某些实施例所使用的照明类似。
当在可摄取设备1900周围的环境促使照明主要地从生物组织反射时,如同在小肠的封闭空间中,对于红色照明2110而言的较低吸光值引起正由生物组织反射较大量的红色照明2110。结果,如与蓝光或绿光反射率比较,在小肠中由可摄取设备1900的径向传感器2002a、2002b和2002c检测较高水平的红光反射率。
本领域的技术人员也将认识到,一般软组织影响不同波长的光的散射。如在图表2104上所示,一般软组织对于增大的波长而言具有较低水平的散射。反过来,光的散射还会影响返回到光检测器的光子的数量。另外地,软组织的散射特征与可替代的反射介质(例如,胃内的胃液对比大肠中的粪便物)不同。如本文所述的,使用不同波长的光(例如,蓝色照明2106、绿色照明2108和红色照明2110)的可摄取设备1900,随着其确定在胃肠道内的位置而能够利用这些不同的散射特征。
由于以上因素,除了其它因素以外,例如,胃液中的略微不同的颜色、位于小肠中的胆汁和在通向大肠的回盲部附近的腐殖分解物质,可摄取设备1900随着其经过胃肠道而能够以多个不同的波长收集数据并且可靠地区别出在胃肠道内的不同的位置。
在某些实施例中,可摄取设备1900可以使用用于径向照明器的适当的RGB LED包实施。在某些实施例中,在可摄取设备1900中的径向安装的照明器可以包括SML-LX0404SIUPGUSB RGB LED。在某些实施例中,额外的LED可以安装在RDB LED包旁边以允许用于额外的波长,并且在某些实施例中,IR LED或多色的白光LED可以被安装在可摄取设备1900的轴向位置中(例如,以便实施轴向照明器2008a或2008b)。
图22示出如与设备有关的胃肠道的不同区域的反射特性。随着可摄取设备(例如,可摄取设备1900)通过胃肠道运送,不同的环境在不同的情况下影响由各种径向传感器所测量的反射率的总量。所检测的光的绝对水平中的这些改变不考虑在不同波长的光之间的额外的变化。虽然图22使用配备有径向和轴向照明器的可摄取设备1900的实施例来说明,但是该讨论应用于在本申请中所述的任何可摄取设备(例如,可摄取设备10、300、302、304、306和700),所述可摄取设备可以具有不同数量或不同取向的照明器和检测器。另外地,在某些实施例中,具有仅径向传感器的可摄取设备可以用于实施本文所述的定位技术中的某些。
例如,图像2200示出在胃中的可摄取设备(例如,可摄取设备1900)的纵视图并且示出由可摄取设备1900上的各种径向传感器从各种径向照明器检测的光量如何在不同的条件下变化。从在离胃壁略小的距离处正传输的照明2202由壁反射到相邻的径向检测器的接受角中。这引起正检测极大量的总反射率。通过比较,从任一种组织或微粒指向离开的照明2204引起最低限度的光反射回到检测器中。照明2206表明当可摄取设备1900离周围的壁或组织太近时,非常少的光以将由径向检测器检测的方式反射。最终,照明2208表明微粒的存在会允许光反射和散射,使得由径向检测器接收到较大的信号。这些不同类型的表现促使由可摄取设备1900在其处于胃中的同时检测不同的绝对水平的光。如参照图8至图13所述,这也促使将由可摄取设备1900检测较大变化的光量。
作为另一个示例,图像2210示出在胃中的可摄取设备(例如,可摄取设备1900)的侧视图,并且示出由可摄取设备1900上的各种径向传感器从轴向照明检测的光量。轴向照明从附近的胃壁反射,并且所得到的反射沿着多个方向散射。指引到胃液中的反射2212可以容易地由径向传感器检测。通过比较,在胃的侧上指引到组织中的反射2214不容易由径向传感器检测。
作为另一个示例,图像2216示出在小肠中的可摄取设备(例如,可摄取设备1900)的纵视图,并且示出在不同的条件下如何由可摄取设备1900上的各种径向传感器从各种径向照明器检测光量。小肠的封闭密闭空间会防止大量的径向照明被反射回到检测器中。与照明2206类似,因为可摄取设备1900离小肠的壁太近,非常少的照明能够被直接反射回到径向检测器中,引起正检测较低总水平的照明。然而,由于小肠粘膜的波长吸收特性,当使用红光时,该效应可以减轻。
作为又一个示例,图像2218示出在小肠中的可摄取设备(例如,可摄取设备1900)的侧视图,并且示出环境如何改变由可摄取设备1900上的各种径向传感器从轴向照明器检测的光量。通常,小肠的小密闭空间将导致可摄取设备1900沿着胶囊状可摄取设备的纵向轴线取向。从设备的端部传输的轴向照明使最低限度的组织或微粒从封闭空间且与封闭空间组合地反射,非常少的轴向照明能够由径向传感器检测。结果,来自轴向照明器的最低限度的光能够由小肠中的可摄取设备1900的径向传感器检测。相比之下,在胃或大肠的环境中,轴向照明将引起正检测较大的反射率。在某些实施例中,可摄取设备1900的轴向照明器可以配置成传输可以由径向检测器检测的波长的光,例如白光。在某些实施例中,径向检测器和轴向照明器可以设计成使得由轴向照明器传输的光无法容易地由径向照明器检测。例如,轴向照明器可以配置成传输在红外波长中的光,并且径向检测器可以配置成接收在可见光谱中的光。
图23示出从如与可摄取设备(例如,可摄取设备1900)有关的胃肠道的不同区域反射的检测光。尤其,图23示出径向照明如何可以由环境反射和由各种径向检测器接收。该描述可以与参照图8A至图8C和图22的描述组合或由该描述补充,所述参照图8A至图8C和图22的描述说明了类似的主旨。在某些方面中,可摄取设备上的径向照明器(例如,可摄取设备1900(图19)的径向照明器2002a、2002b和2002c(图20))在约120度的弧度中远离设备的外壳传输照明2308。在某些实施例中,该弧度可以依据用于构造可摄取设备的材料和部件而更大或更小。类似地,径向检测器(例如,径向检测器2002a、2002b和2002c(图20))将具有检测器可接受范围2310,并且在检测器可接受范围2310内朝向可摄取设备的径向检测器(例如,径向检测器2002a、2002b和2002c(图20))行进的光将能够由径向检测器检测。在某些方面中,可接受范围是约120度的弧度,但是本领域的技术人员将应理解,这取决于多个因素,包括可摄取设备的内部部件的配置和光学考虑因素,例如,设备外壳的折射率、直接的周围环境的折射率以及所得到的设备外壳与周围环境之间的界面的接受角。
缺乏任何类型的反射面或微粒的开放式环境2300无法使作为照明2308的一部分传输的光偏转。结果,光远离设备在较笔直的路径中行进,并且基本上没有一个照明2308将由径向检测器检测。
具有微粒2302的环境可以致使照明在从较小微粒反射之后由径向检测器接收。围绕设备存在的较小不规则微粒会促使照明沿着多个方向反射,促使照明的部分被重新定向到径向检测器的接受角中。基于径向照明器和微粒之间的距离,变化的量的照明可以由径向检测器检测。例如,微粒2316处于照明2308的弧度内并且较接近于照明2308的源。结果,包含在照明2308中的光的部分将从微粒2316反射并且被重新定向到径向检测器可接受范围2310中。通过比较,微粒2318仍然处于照明2308的弧度内,但是它离照明2308的源更远。照此,较少的光量将从微粒2318反射,被转向到检测器可接受范围2310中,并且由径向检测器检测。例如,这可以既是由于随着光离照明源更远地行进所降低的光强,也是由于由其它微粒(例如,在照明源与微粒2318之间的路径中的微粒2316)或在包围设备的流体或其它物质中的阴暗所导致的可能阴影。
在胃壁2304附近的环境表明照明如何可以从在离设备略小距离的胃组织反射之后由径向检测器接收。虽然这参照胃组织来说明,但是这可以应用于在离设备足够距离的任何类型的器官组织。在离胃足够的距离处,大量的照明2308将从胃粘膜2312反射并且被转向到检测器可接受范围2310中。结果,照明2308的较大部分能够由径向检测器检测。将显而易见的是在实际的胃中可摄取设备的位置将运动和改变,在所检测的光量中引起较大变化,以及较大的光量被平均地接收。在某些实施例(例如,可摄取设备10、300、302、304、306、700、1900)中,在所检测的绝对光量或所检测的平均光量中的较大变化二者可以用于确定可摄取设备位于胃中。
小肠环境2306可以致使由径向检测器接收较少量的照明。通常,小肠粘膜2320的封闭空间将防止照明2308到达径向检测器。照明2308由小肠粘膜2320反射,但是因为定位,照明2308中的非常少的光能够被直接反射到径向检测器可接受范围2310中。较少的光量将继续在小肠粘膜2320与可摄取设备的外壳之间来回反射并且将最终到达合适的可接受范围2310,在该处可以检测所述较少的光量,但是这通常引起检测非常少量的整体光。然而,由于小肠的微红色,如与绿光或蓝光比较,红色照明会更好地能够多次反射并且到达径向检测器。
图24示出在胃肠道的不同的区域中测量的典型的反射率。可摄取设备1900的功能主要为跟踪在设备周围的胃肠道的当前区域并且监测设备周围的环境以确定从一个区域到另一个区域的变化。在某些实施例中,可摄取设备1900可以通过监测从一个区域到另一个区域的变化而独立自主地识别出设备在身体的胃肠道内的位置。在某些实施例中,可摄取设备1900起到状态机的功能,其中,所述状态跟踪布置有可摄取设备1900的胃肠道的当前部分。可摄取设备1900可以区分出各种位置,包括在身体外部的起始点2402、胃2404、十二指肠2406、空肠2408、盲肠2410、大肠2412和在身体外部的出口点2414。在某些实施例中,可摄取设备1900可以仅区分出胃2404、小肠(例如,可以包括十二指肠2406和空肠2408在内的小肠)和大肠(例如,可以包括盲肠241和大肠2412在内的大肠)。在某些实施例中,可摄取设备1900可以区分出上述位置的子集和/或以上位置和其它位置的组合,例如,嘴部、回肠或直肠。
在某些实施例中,可摄取设备1900可以朝向在可摄取设备的外壳外部的环境以第一波长传输照明,检测所得到的反射率,并且基于第一反射率将反射率值存储在数据集中。例如,可摄取设备可以以红色波长传输照明,检测红光反射率,并且将反射率值存储在红色数据集中,所述红色数据集指示在红光反射率中测量到多少光。对于在其它波长例如蓝色波长、绿色波长或红外波长的多个其它类型的照明,可摄取设备1900可以重复该处理。可摄取设备1900可以跟踪从在红色、绿色、蓝色和IR光谱中的每个中的反射率传感器(即,径向检测器)收集的反射率数据。
该数据可以继而被板载微处理器使用以执行定位算法,所述定位算法识别出从胃2404至小肠2406的十二指肠部分的幽门过渡2416;从十二指肠2406至空肠2408的屈氏韧带过渡2418;从回肠(即位于空肠2408的端部处的区域)至盲肠2410的回盲肠过渡2420;和从盲肠2410至大肠2412的其余部分的盲肠过渡2422。这可以通过以下来实现,即,使用多个不同波长的光,测量由设备周围的环境所反射的不同的光量,并且鉴于胃肠道的不同区域的不同吸光特性确定设备的位置。可摄取设备1900可以以定期的间隔收集该数据,并且在某些实施例中这些间隔可以间隔开一秒至10分钟。例如,可摄取设备1900可以一分钟几次取得新数据样本,直到其检测小肠中的位置为止,并且继而可以每隔几分钟取得新数据样本。在没有取得样本的同时,可摄取设备1900可以进入休眠睡眠或备用状态以保存能量储备。
在某些实施例中,可摄取设备1900可以通过使用适当的传感器阵列(例如,如图20中所示)检测各种位置和在图24中所识别出的过渡,所述适当的传感器阵列由起到反射率传感器功能的多个径向和轴向发光二极管(LED)/光电晶体管对构成。在某些实施例中,可摄取设备1900还可以包括温度传感器和内部实时时钟(RTC)振荡器以用于守时。电气领域的技术人员将应理解,温度传感器和振荡器是容易获得的部件,其可以使用已知的技术集成到PCBA(例如,PCBA202)的电路中。
参照图24所述的可摄取设备1900具有一套径向照明器(例如,照明器2004a、2004b和2004c(图20))以及轴向照明器(例如,轴向照明器2008a(图20)),所述径向照明器能够传输在红色光谱、绿色光谱和蓝色光谱中的光,所述轴向照明器能够传输在红外光谱中的光。可摄取设备1900可以继而具有一套检测器(例如,径向检测器2002a、2002b和2002c(图20)),其能够测量这些不同类型的光的反射率。然而,在某些实施例中,特定的过渡可以使用仅两个不同波长的光检测,并且用于实施照明器和检测器的硬件可以被适当地改变。例如,所述识别出幽门过渡、屈氏韧带过渡和盲肠过渡可以通过将红光反射率与绿光反射率或蓝光反射率比较来实现。
随着可摄取设备1900通过图24中所示的胃肠道的不同区域运送,可摄取设备1900可以随时间收集传感器数据。存储在存储器中(例如,存储在存储器分单元140(图2A)上)且由处理器或微控制器(例如,微控制器110(图2A))执行的设备软件跟踪所有测量和事件。以下进一步说明的板载算法继而被施加以通过监测各种位置和过渡而确定可摄取设备1900位置。该算法已经设计成通过使用子算法识别出解剖学过渡(例如,进入胃的入口、幽门过渡2416、屈氏韧带过渡2418、回盲肠过渡2420、盲肠过渡2422和离开身体的出口2414)而穿过表示可摄取设备1900的解剖学位置(例如,起点2402、胃2404、十二指肠2406、空肠2408、盲肠2410、大肠2412和出口2414)的状态。在某些实施例中,可摄取设备1900将具有与设备的已知的或估计的位置相对应的状态,并且基于当前状态,可摄取设备1900可以运行算法以搜索下一个状态过渡。例如,当可摄取设备1900知道其处于胃(例如,胃2404)中时,它将把当前状态识别为“STOMACH”状态。可摄取设备1900将继而执行算法以识别出幽门过渡(例如,幽门过渡2416)。一旦幽门过渡被识别出,可摄取设备1900可以确定其现在位于小肠的十二指肠部分(例如,十二指肠2406)中,并且该状态将切换到“DUODENUM”。在某些实施例中,可摄取设备可以通过推断出或推理出设备的当前位置而确定状态。例如,在某些实施例中,可摄取设备1900可以假定在缺乏所检测的状态过渡的情况下,设备的位置一直保持不变并且维持相同的状态。作为另一个示例,当设备被第一次激活时,其可以假定处于在身体外部的初始开启状态(例如,起点2402)。
图24还示出由于在不同的波长的照明和由设备随时间测量的温度所引起的检测的反射率的绘图。温度2424在可摄取设备1900进入身体之后不久变化到接近体温的温度并且一旦可摄取设备1900离开身体就变回到不同的环境温度。所检测的绿光反射率2426和蓝光反射率2428类似地表现,贯穿十二指肠2406、空肠2408、盲肠2410和大肠2412具有较低的响应。为了参照可摄取设备1900所述的算法的目的,所检测的绿光反射率2426和所检测的蓝光反射率2428在较大程度上是可互换的,但是为了简化我们可以只涉及检测的绿光反射率2426。
检测的红光反射率2430比检测的绿光反射率2426和蓝光反射率2428随时间具有更为多变的响应。检测的红光反射率2430在胃2404中较低,并且在幽门过渡2416期间随着可摄取设备1900进入小肠2406的十二指肠部分而上升。检测的红光反射率2430随着其前进通过十二指肠而上升,随着可摄取设备1900接近空肠2408而在屈氏韧带过渡2418附近达到其顶点。在可摄取设备1900经过空肠2408和盲肠2410时,检测的红光反射率2430降低,在盲肠过渡2422附近达到局部最小值。
在图24中所示的检测的红外反射率2432是轴向照明器和轴向检测器的结果,与典型地由径向检测器所测量的其它检测的反射率2426、2428和2430相对照。在通过胃、十二指肠和空肠运送期间,检测的红外反射率2432具有与检测的红光反射率2430类似的表现。然而,检测的红外反射率2432在回盲肠过渡2420附近到达较低点,并且检测的红外反射率在通过大肠2412运送期间在盲肠2410中达到较大值之前增大。
在某些实施例中,可摄取设备1900可以通过将反射率(例如,红光反射率2430)与另一个反射率(例如,绿光反射率2426和蓝光反射率2428)比较来确定何时已经发生状态过渡。例如,当红光反射率2430或红外反射率2432已经从绿光反射率2426或蓝光反射率2428以统计上显著的方式发散时,可以检测到幽门过渡(例如,幽门过渡2416)。在某些实施例中,所述判定是否两个反射率(例如,红光反射率2430和绿光反射率2426)已经以统计上显著的方式发散可以包括使用适当的统计技术判定是否红光反射率数据的样本平均值和绿光反射率数据的样本平均值在统计上是不同的。例如,这可以通过以下来实现,即,执行t-测试并且判定是否两个样本平均值以p<.05的显著水平在统计上是不同的。在某些实施例中,该测试可以对在反射率数据集中所记录的最新值执行。在某些实施例中,数据集可以在被用于做统计比较之前被清理(例如,通过检测和去除离群值)。本领域的技术人员将应理解,各种测试统计和统计技术可以用于确定统计显著性。这些技术可以包括,但不限于,平均值、标准偏差和方差的比较,t-测试,f-测试,数据清理方法,机器学习技术,特征抽取和类似方法,或它们的任何组合。
本领域的技术人员也将应理解,可以使用各种已知的统计技术或特定的技术进行识别出一个或多个反射率之间的关系,例如,确定何时两个反射率收敛或发散或何时各个反射率到达局部最大值或最小值。例如,一个特定的方法可以通过估计何时红光反射率2430的简单移动平均线是绿光反射率2426的简单移动平均线的两倍而确定统计上显著的发散。作为另一个示例,在某些实施例中,可摄取设备1900可以对加权或简单移动平均线之间的差值求积分,并且确定何时积分大于阈值以确定两个反射率已经以统计上显著的方式发散。阈值自身可以是简单移动平均线之一的倍数,例如,在绿光反射率数据集2426中的最后50个数据点的简单移动平均线的十倍。在某些实施例中,当测量的红光反射率2430是测量的绿光反射率2426例如10倍大或更大时,可摄取设备1900可以确定统计显著性。在某些实施例中,当测量的第一反射率(例如,红光反射率2430)大于测量的第二反射率(例如,绿光反射率2426)时,可摄取设备可以将计数器递增一。在某些实施例中,当第一数据集(例如,红光反射率2430)的平均值减去第一数据集的标准偏差的倍数大于第二数据集(例如,绿光反射率2430)的平均值加上第二数据集的标准偏差的倍数时,计数器可以递增。例如,在某些实施例中,当红光反射率2430的平均值减去红光反射率2430的标准偏差大于绿光反射率2430的平均值减去绿光反射率2430的标准偏差时,十二指肠检测算法可以将计数器递增一,并且当计数器大于7000时,检测到幽门过渡2416。在某些实施例中,当红外反射率2432的平均值减去红外反射率2432的标准偏差大于绿光反射率2430的平均值减去绿光反射率2430的标准偏差时,盲肠检测算法可以将计数器递增一,并且当计数器大于1000时,检测到回盲肠过渡2420。在某些实施例中,可摄取设备1900可以周期性地重置计数器。在某些实施例中,因为计数器是无单位的,并且计数可以取决于由设备取得样本的频率,当计数达到不同的阈值时,可摄取设备1900可以检测过渡。例如,在某些实施例中,可摄取设备1900可以以较快的速度取得新数据,并且当计数器大于700时,十二指肠检测算法可以检测状态过渡。
随着可摄取设备1900通过胃肠道的部分运送,可摄取设备1900利用定位算法来确定其位置。在某些方面中,该通过在与存储在设备中的胃肠道的总解剖结构相对应的设备的各种状态之中选择来实现。根据以下某些实施例说明由可摄取设备1900跟踪的状态和实施成跟踪状态过渡的子算法。
GI状态:START_EXTERNAL。当设备被编程并且开始记录操作时,进入该状态。例如,在起点2402处,在将设备施用给病人之前,可摄取设备1900可以被设定到START_EXTERNAL状态。在某些实施例中,可摄取设备1900可以包括通信分单元(例如,参照可摄取设备10(图1)的实施例所述的通信分单元120(图2A)),并且可以与基站(例如,基站950(图17A至图17C))通信。当可摄取设备1900与基站连接时,可摄取设备1900可以通过默认的方式被设定到START_EXTERNAL状态。在某些实施例中,每当可摄取设备1900被第一次激活时,START_EXTERNAL状态还可以是默认状态。
GI状态:STOMACH。一旦可摄取设备1900确定已经进入胃2404,进入该状态。在某些实施例中,可摄取设备1900可以包括温度传感器以用于测量设备周围的环境的温度。一旦所测量的温度接近于病人的体内体温,则可摄取设备1900可以确定已经过渡到胃中。例如,对于典型的人类病人而言,内部体温接近于37摄氏度,当温度传感器测量到在30度至40度的范围内的温度时,可摄取设备1900可以继而确定已经进入胃。在某些实施例中,温度范围可以通过使用基站对可摄取设备1900编程而被人工地设定。在某些实施例中,可摄取设备1900也可以适于使用径向和轴向检测器(例如,检测器2002a、2002b、2002c、2006a和2006b)以确定环境中的环境光水平中的变化。在测量到周围环境中的光线降低,所述光线降低将典型地吞没可摄取设备,可摄取设备1900可以确定已经进入身体内并且自动地确定其已经从START_EXTERNAL过渡到STOMACH状态。这会当可摄取设备1900不包括温度传感器时或当周围环境的温度与内部体温类似时是尤其有用的。
GI状态:DUODENUM。一旦可摄取设备1900检测从胃2404到十二指肠2406的幽门过渡2416,进入该状态。这可以通过使用十二指肠检测子算法来实现,所述十二指肠检测子算法每当可摄取设备1900处于STOMACH状态中时自动地操作。在某些方面中,十二指肠检测子算法可以确定何时红光反射率2430或红外反射率2432从绿光反射率2426或蓝光反射率2428以统计上显著的方式发散。本领域的技术人员将应理解,各种统计、过滤或特定的技术可以用于识别出该点。例如,这可以使用各种已知的统计技术或特定的技术计算,例如,使用例如最后30个数据点执行t-测试,或通过确定何时红光反射率2430或红外反射率2432例如是绿光反射率2426或蓝光反射率2428的值的两倍。在某些方面中,十二指肠检测子算法比较检测的红色光谱2430对比检测的绿色光谱或蓝色光谱之间的差值,并且当差值大于阈值时标记出过渡。在某些方面中,该算法使用在检测的红光反射率数据和检测的绿光反射率数据中的多个数据点的平均值,取得两个平均值之间的差值,并且将该差值与阈值比较。例如,可摄取设备1900可以配置成每15秒取得新数据样本并且取得最新40个样本的简单移动平均线以确定平均红光反射率和平均绿光反射率。在某些实施例中,十二指肠检测算法可以包括取得对红光反射率的平均值和绿光反射率的平均值之间的差值的积分。例如,在某些方面中,取得两个简单移动平均线之间的差值的平均值可以帮助可摄取设备1900避免错误的过渡或帮助较早检测到过渡。在图33中示出十二指肠检测算法的其它方面。虽然以上讨论使用检测的红光反射率2430和检测的绿光反射率2426,但是在某些实施例中,类似的算法可以使用检测的红外反射率2432代替检测的红光反射率2430或通过使用检测的蓝光反射率2428代替检测的绿光反射率2426来执行。
GI状态:JEJUNUM。一旦检测到在十二指肠2406与空肠2408之间的屈氏韧带过渡2418,进入该状态。在某些方面中,这可以通过使用空肠检测子算法来检测,一旦可摄取设备1900处于DUODENUM状态中,所述空肠检测子算法可以自动地执行。在某些方面中,空肠检测子算法可以确定何时红光反射率2430或红外反射率2432达到局部最大值或何时在红光反射率2430或红外反射率2432与绿光反射率2426或蓝光反射率2428之间的差值以统计上显著的方式恒定(例如,由于红光反射率2430达到局部最大值)。本领域的技术人员将应理解,各种统计、过滤或特定的技术可以用于识别出该点。例如,这可以通过发现何时红光反射率2430或红外反射率2432的导数或有限差分达到零或改变迹象来计算。在某些方面中,空肠检测子算法识别出在红色光谱对比绿色光谱和蓝色光谱中的最大反射光的点。在某些方面中,空肠检测子算法可以将检测的红光反射率值与阈值比较,并且在某些方面中,该算法估算检测的红光反射率2430的简单移动平均线与检测的绿光反射率2426或检测的蓝光反射率2428的简单移动平均线之间的差值。在某些实施例中,检测的红外反射率2432可以代替检测的红光反射率2430使用。
GI状态:CAECUM。一旦可摄取设备1900检测到从回肠(即,在空肠2408的端部处的胃肠道的部分)至盲肠2410的回盲肠过渡2420,进入该状态。在某些方面中,这可以通过使用盲肠检测子算法来检测。在某些方面中,盲肠检测子算法可以确定何时红外反射率2430达到局部最小值或何时红外反射率2430、2432与绿光反射率2426或蓝光反射率2428以统计上显著的方式收敛(例如,由于红光反射率2430达到局部最大值)。本领域的技术人员将应理解,各种统计、过滤或特定的技术可以用于识别出该点。例如,在某些实施例中,这可以通过发现何时红外反射率2432的导数或有限差分达到零或发现何时红外反射率2430与绿光反射率2426之间的差值的简单移动平均线统计上等于零来计算。当可摄取设备1900处于JEJUNUM状态中,该子算法可以自动地执行。在某些方面中,盲肠检测子算法可以将检测的红光反射率2430或检测的红外反射率2432与检测的绿光反射率2326或检测的蓝光反射率2328比较以找出使差值小于第一阈值的点。与我们的其它子算法的讨论类似,在某些方面中,该算法可以使用简单移动平均线,如与原始数据点相对照。在某些方面中,盲肠检测子算法可以对红外光谱中的平均反射光对比绿色光谱中的平均反射光之间的差值求积分,并且测试小于检测阈值的差值。在某些实施例中,其它技术可以被并入盲肠检测子算法中,例如,图32中所示的那些。
GI状态:LARGE INTESTINE。一旦可摄取设备1900检测到从盲肠2410至大肠2412的其余部分的盲肠过渡2422,进入该状态。在某些方面中,这可以通过使用大肠检测子算法来检测。当可摄取设备1900处于CAECUM状态中时,该子算法可以自动地执行。在某些方面中,大肠检测子算法可以确定何时红光反射率2430达到最小值并且与绿光反射率2426或蓝光反射率2428以统计上显著的方式收敛或何时红外反射率2432以统计上显著的方式上升和在足够大的值下趋向平稳。本领域的技术人员将应理解,各种统计、过滤或特定的技术可以用于识别出该点。例如,在某些实施例中,这可以通过发现何时红光反射率2430的样本平均值统计上与蓝色或绿光反射率2426、2428相同来计算。在某些实施例中,这可以通过计算何时红外反射率2432例如在数量级上大于其它反射率时或何时红外反射率2432的有限差分或导数已经例如降低到其最大值的20%时来实现。在某些方面中,大肠检测子算法可以将检测的红光反射率2430与检测的绿光反射率2426比较以确定何时差值低于阈值。与我们的其它子算法的讨论类似,在某些方面中,该算法使用简单移动平均线,如与原始数据点相对照。在某些实施例中,该算法的先进版本对检测的红光反射率2430和检测的绿光反射率2426的简单移动平均线之间的差值求积分并且测试小于阈值的差值。例如,随着取得每个新数据集,可摄取设备1900可以计算更新的简单移动平均线。谨慎的积分可以继而通过对预定数量的最新简单移动平均线之间的差值求和来计算。本领域的技术人员将显而易见,积分可以由若干不同的方式来计算,这些方式中的某些会比其它方式有或高或低的计算效率。例如,取得适当加权的移动平均线之间的差值或向上一次计算的积分添加和减去最新和最旧的简单移动平均线,可以产生等同的结果。在某些实施例中,高于阈值的检测的红外反射率2432可以被并入到大肠检测子算法中。
GI状态:END EXTERNAL。在可摄取设备1900检测到从大肠2412至出口2414的过渡之后,进入该状态。在某些方面中,可摄取设备1900可以通过出口检测子算法检测该过渡,当可摄取设备处于LARGE INTESTINE状态中时,所述出口检测子算法可以自动地运行。在某些实施例中,可摄取设备1900可以配备有温度检测器,并且出口检测子算法可以简单地检查远离病人的内部体温的测量到的温度的变化。例如,如果可摄取设备1900检测到温度低于30摄氏度或在30摄氏度至40摄氏度的范围之外,可摄取设备1900可以确定其已经自然地离开病人的身体。
在某些实施例中,可摄取设备1900可以测量自从可摄取设备1900在START状态中被首先激活之后已经经过的总体时间量。在某些方面中,该测量的时间量可以被并入到出口检测子算法中。例如,通过确定已经经过明显长久的时间段(例如,十五小时),可摄取设备可以确定变化的温度读数是从身体自然离开的结果而不是瞬态扰动(例如,被卡在胃里,如病人引用冷水)。在某些实施例中,可摄取设备1900还可以使用径向或轴向检测器(例如,检测器2002a、2002b、2002c、2006a或2006b)以测量环境光来帮助确定从身体离开。在某些实施例中,可摄取设备1900还可以进入END EXTERNAL状态并且在已经经过极长久的时间段之后处于休眠状态。在某些方面中,这可以既用作用于保存能量的装置,又用作故障保护。例如,不管其它指示器,可摄取设备1900可以进入END EXTERNAL状态并且在已经经过七天之后处于休眠状态。
将应理解,参照图24所讨论的位置和过渡用于说明的目的并且不应当认为是限制性的。此外,本文所述的系统、设备和方法可以用于识别出多个其它位置或过渡(例如,通过将不同波长的光与阈值比较而识别出回肠和在十二指肠与回肠之间的过渡)。另外地,设备的某些实施例可以通过将DUODENUM、JEJUNUM和CAECUM合并到单个SMALL INTESTINE状态中而减少状态的数量。在这种情况下,十二指肠检测子算法确定何时可摄取设备过渡到小肠状态中,并且盲肠检测子算法确定何时可摄取设备远离SMALL INTESTINE状态过渡到LARGEINTESTINE状态中。在某些实施例中,诸如MOUTH、ILIEUM或COLON状态的其它状态也可以被设备使用。
虽然我们具体地参照图24说明可摄取设备1900,但是将应理解,在本申请中可以使用可摄取设备中的任一个。这例如包括可摄取设备10、300、302、304、306、700,以及参照图26至图28所讨论的可摄取设备2500,以及具有在上述设备上发现的特征的各种组合的其它可摄取设备。
图25示出可摄取设备的另一个实施例的外观图,其可以用于独立自主地识别出在胃肠道内的位置并且独立自主地从胃肠道取样或将药剂释放到胃肠道中。与示例性可摄取设备700类似,图25中示出的示例性可摄取设备2500配置成执行本文所述的位置检测方法并且获取样本和/或运载包括药剂和治疗剂在内的物质。在通过胃肠道运送期间,可摄取设备2500可以基于所确定的设备的位置或在已经建立起设备的位置之后的预定时间下获取多个样本。参照图25至图35说明由可摄取设备2500所使用的系统、设备和方法,但是可摄取设备2500的特征可以与该申请的任何其它部分组合。可摄取设备2500的多个部件可与说明可摄取设备10、300、302、304、306、700和1900中所使用的部件互换。因此,与已经说明的可摄取设备类似的部件将不更加详细地讨论并且反而将关注该实施例的有区别的特征。还将应理解,在本申请中所述的可摄取设备中的任一个(例如,可摄取设备10、300、302、304、306、700和1900)可以被修改成包括参照可摄取设备2500所述的系统、设备和方法。
在图25中示出可摄取设备2500的外观图。可摄取设备2500被示出为具有外壳,所述外壳包括连接到第一端部部分2504的第一壁部分2502和连接到第二端部部分2514的第二壁部分2512。第一壁部分2502和第二壁部分2512通过连接部分2步骤510连接。
第一壁部分2502被示出为具有光学透明的或半透明的窗2506。窗2506可以具有与第一壁部分2502的其余部分不同的光学特性,并且对于可见光和红外光而言可以是比第一壁部分2502的其它部分更加透明或半透明的。然而,在某些实施例中,可摄取设备2500会适于使用来自图1的可摄取设备10的第一壁部分14a和第一端部部分16a代替第一壁部分2502和第一端部部分2504。第一端部部分2504与图1中所示的第一端部部分16a基本类似;然而,第一端部部分2504可以具有位于设备的端部处的窗。在某些方面中,该窗可以具有与第一端部部分2504的其余部分不同的光学特性并且配置成允许照明进出可以布置有轴向传感器分单元的端部。
第二壁部分2512具有开口2518并且配置成围绕设备的纵向轴线转动。开口2518充当用于使样本从胃肠道进入可摄取设备2500的外壳的通路或充当用于使存储在可摄取设备2500内的药剂释放到胃肠道中的通路。在某些实施例中,由可摄取设备2500所取得的样本可以被分析。在可摄取设备2500内的齿轮马达704能够转动和促使第二壁部分2512运动。在某些实施例中,这通过使用连接到第二壁部分2512的内部的马达小齿轮来实现。马达小齿轮可以使用氰基丙烯酸酯、或任何其它适当的粘合材料或粘结剂连接。第二端部部分2514连接到第二壁部分2512并且包含有小开口2516。小开口2516可以用于锚固齿轮马达704的端部。齿轮马达704的端部可以定位在小开口2516内,允许其被锁定到适当的位置中。在某些实施例中,第二端部部分2514将随同第二壁部分2512一起转动,但是在某些实施例中第二端部部分2514将随着第二壁部分2512运动而保持固定不动。随着第二壁部分2512运动,开口2518将随其一起运动。在某些配置中,将在第二壁部分2512下方有一个或多个室(例如,室706(图14A))。随着开口2518运动,室可以变得交替地暴露于围绕可摄取设备2500的环境或从围绕可摄取设备2500的环境关闭。
用在可摄取设备2500中的PCB 2508具有与参照图2A至图2E所讨论的PCB 30类似的特征和功能。然而,PCB2508可以具有如后面在图27中描述的稍微不同的电气和机械系统以及图28中所讨论的略微不同的固件。PCB 2508还可以被编程以执行参照设备的其它实施例所述的定位算法或另外地或可替代地执行参照图29至图33所讨论的其它算法。PCB 2508还可以具有轴向感测分单元(例如,图1A的轴向感测分单元42),并且所述PCB 2508可以以径向传感器阵列为特征,所述径向传感器阵列利用径向照明器和径向检测器(例如,图19的照明器1906a和1906b和检测器1904)以确定与其它可摄取设备(例如,图1A至1B、图3A至图6B和图19的可摄取设备10、300、302、304、306和1900)类似的设备的位置。为了适应可摄取设备2500中的其它取样部件,在某些实施例中,PCB 2508可以仅沿着一个方向延伸并且配合到第一壁部分14a中。
图26示出可摄取设备2500的分解图。磁环2600连接到第二壁部分5212并且随同第二壁部分5212一起转动。在某些实施例中,磁环2600可以使用氰基丙烯酸酯、或任何其它适当的粘合材料或粘结剂被粘附到第二壁部分2512。在某些实施例中,磁环2600的内部可以与齿轮马达704互锁,促使磁环2600、第二壁部分2512和第二端部部分2514随着齿轮马达704转动而转动。在某些实施例中,第二壁部分2512或第二端部部分2514将直接连接到齿轮马达。例如,齿轮马达可以在小开口2516处与第二端部部分2514互锁。为了帮助设备的操作,PCB 2508可以以额外的磁传感器2602为特征,所述额外的磁传感器2602可以确定磁环2600的取向。例如,磁环2600可以包含有一系列磁体,所述一系列磁体被定位成使得当开口2518与室706对准时磁体最接近磁传感器2602。PCB 2508可以继而将来自磁传感器2602的检测的信号用作反馈的一部分以通过控制齿轮马达704来调节开口2518的位置。通常,PCB2508可以包括齿轮马达控制器,并且PCB 2508可以传输电DC或AC信号以使齿轮马达704运动。第二壁部分2512的锁定端部2606配置成与连接部分2步骤510一起工作。所述锁定端部2606设计成允许第二壁部分2512相对于第一壁部分2502自由地转动,而同时也保持连接到第一壁部分2502。
存储分单元2604与存储分单元702(图14A)类似并且由第二壁部分2512封装。存储分单元2604包括室,例如,室706。当相应的室开口708与第二壁部分2512中的开口2518对准时,存储分单元2604上的每个室706都是可接近的。随着第二壁部分2512运动,室可以变得可接近围绕可摄取设备2500的环境,或它们可以变得无法接近围绕可摄取设备2500的环境。每个室706还都可以包含有亲水泡沫或海绵以帮助取得样本。另外地,该亲水泡沫或海绵可以设有或没有生物制剂以用于固定或检测目标分析物,将室706修改成取样和诊断室。这可以与其它诊断和化验技术结合以诊断或检测不同的条件,所述不同的条件会影响胃肠道的特定部分。
如参照可摄取设备2500所述,存储分单元2604包含有两个室(例如,室706的复制品),所述两个室围绕存储分单元2604的圆周的约三分之二散布。存储分单元2604的最后部分是无效室2608,其形成阻塞开口2518的突出部。在某些方面中,无效室2608可以由硅酮制造出来,并且在其它方面中无效室2608可以由具有约45的邵氏A硬度的硅酮制造出来。在某些实施例中,存储分单元2604的最后部分可以包含有第三室,所述第三室是不使用的或容许与围绕可摄取设备2500的环境不断接触。在某些实施例中,第一室可以用于对胃肠道取样,并且第二室可以用于因为获取第二样本而对胃肠道重新取样。例如,在某些实施例中,可摄取设备2500可以因为取得第二样本而在第一样本之后的固定的时间段对胃肠道重新取样。在某些实施例中,可摄取设备2500可以在与第一位置不同的第二位置处对胃肠道重新取样。例如,可摄取设备2500可以用待取样的两个不同的预定位置(十二指肠和空肠)编程。在这种情况下,当可摄取设备2500确定其位于十二指肠中时,可摄取设备2500可以取得第一样本,并且当可摄取设备2500确定其位于空肠中时,可摄取设备2500可以取得第二样本。在某些实施例中,在取得样本中的每个之后,可摄取设备通过使第二壁部分2512运动到使开口2518与无效室2608对准的位置而防止样本离开室(例如,室706的复制品)。
在某些实施例中,随着第二壁部分2512转动,存储分单元2604保持固定不动,但是在某些实施例中,随着第二壁部分2512固定不动,存储分单元2604可以转动。在某些实施例中,开口2518可以通过滑动门遮盖,所述滑动门可以运动到揭开开口2518的侧。当与转动的存储分单元2604协同使用时,这会对使存储分单元内的可用空间最大化是尤其有效的。在某些实施例中,存储分单元还会适于包括样本诊断,例如,化验。存储分单元可以交替地隔离新样本,对样本执行诊断并且将样本释放回到胃肠道中。在某些实施例中,室706的后壁可以包括机电致动器以将样本推压出室。在某些实施例中,类似的机电致动器可以用于通过抽吸而将样本或流体牵引到室中。在某些实施例中,一旦可摄取设备2500通过将第二壁部分2512相对于存储分单元2604重新配置而达到特定的位置,可摄取设备2500还可以隔离室706中的样本,使用诊断例如化验测试样本,并且基于诊断的结果,相对于存储分单元2604重新配置第二壁部分2512以释放存储在室706的不同的一个室中的药剂。
图27示出与设备的某些实施例相对应的各种电气分单元。尤其,图27示出电气分单元,其可以在与可摄取设备2500有关的PCB 2508中实施,但是参照图27所讨论的系统、设备和方法中的任一个可以与本申请中的任何其它系统、设备或方法结合。例如,在图2A至2E和图15中所示的系统、设备和方法可以图27中的系统、设备和方法补充或可替代地实施,并且反之亦然。在某些实施例中,PCB 2508是具有刚性加强件的柔性PCB,其由三个氧化银370电池供电。PCB 2508的电气系统通过微控制器2700控制,所述微控制器2700在某些实施例中可以与微控制器110(图2A)类似。在可摄取设备2500的某些实施例中,微控制器2700是STM32L051k8,其具有低功率ARM Coretex芯。微控制器2700以存储器分单元2702为特征,其可以包括闪存存储器2704和EEPROM存储器2706二者以既用于存储指令又用于存储从各种传感器取得的数据。
电气系统包括顶部轴向感测分单元2708、径向感测分单元2710,并且在某些实施例中可以包括额外的底部轴向感测分单元2712,所述感测分单元全部可以与参照图2A和图15所讨论的感测分单元类似,并且在某些实施例中,每个分单元都可以包括LED/光传感器对。微控制器2700可以使用通用输入输出接口(例如,通用I/O 112)与模拟-数字转换器(例如,模拟-数字转换器116)结合而与这些感测分单元通信,所述模拟-数字转换器用于转化和量化由包含在感测分单元2708、2710、2712中的光传感器检测的信号。电气系统还可以包括IR光接收器/发送器2714,其可以用于帮助定位或可以用于传输和接收信号。例如,这可以与通信分单元120和光编码器20(图2A)协同使用以与基站通信并且允许可摄取设备2500被编程。在某些实施例中,PCB 2508还可以包括RF收发器以用于用在通信中(例如,RF收发器722)。IR光学接收器发送器2714可以使用通用I/O 112或UART(例如,通用异步接收器/发送器(UART)接口114(图2A))与微控制器2700通信。
在某些实施例中,PCB 2508包括在32.768kHz下操作的实时时钟(RTC)振荡器2716。该时钟与微控制器2700直接通信,并且可以用于在实时的准确度下量化胶囊运送时间,或者可以用于随着可摄取设备进入暂时睡眠状态中而跟踪时间,并且以定期的间隔唤醒自身。用于微控制器2700的电源以功率调节器2718以及断电保护电路2720为特征,所述功率调节器2718控制和过滤由电池18所递送的电压,所述断电保护电路2720防止或基本防止电压中的较小变化干扰设备功能。例如,在某些方面中,随着电池18用于使马达2722运动,断电保护电路可以缓解可能的电压降落。马达2722可以与齿轮马达704基本类似,但是电路会容易地适于使其它类型的马达或致动器运动。在某些实施例中,断电保护电路2720可以包括肖特基二极管,其被连接在电池18与微控制器2700之间,并且断电保护电路2720可以另外地在具有微控制器2700的肖特基二极管的侧上包括散装电容(bulkcapacitance)。在某些实施例中,由于使马达2722运动而引起的电池18中的电压降落可以致使肖特基二极管将微控制器2700与电池18电隔离,而同时允许微控制器2700通过从散装电容抽取所存储的能量而维持操作。在某些实施例中,微控制器2700还可以在马达2722运动的同时暂停一些设备的功能。例如,在马达2722运动时,微控制器2700可以暂停使用感测分单元2708、2710和2712并且从散装电容抽取较少的能量。在某些方面中,该断电保护电路可以允许可摄取设备2500使用同一个电池18来操作马达2722和微控制器2700二者。在某些实施例中,断电保护电路还可以包括电压传感器以用于感测电池18的电压水平和/或散装电容,并且可摄取设备2500可以不使马达2722运动,除非所感测的电压水平中的一个或二者高于阈值以外。例如,可摄取设备2500将防止马达2722运动,除非大容量电容器上的电压在马达运动的持续时间上足以维持微控制器2700的操作以外。
在某些实施例中,PCB 2508也具有马达位置传感器2724和马达方向控制2726,所述马达位置传感器2724和马达方向控制2726通过GPIO与微控制器2700通信,所述马达位置传感器2724和马达方向控制2726组合使用以操纵马达2722(例如,齿轮马达704)。马达方向控制2726是马达方向H桥电路,其可以使DC-马达(例如,马达2722、704)顺时针转动还是逆时针转动交替。这可以与马达驱动器(例如,马达驱动器742(图15))或马达控制分单元(例如,马达控制分单元740(图15))组合使用。这确保开口2518可以在不干扰其它室的情况下与特定的室开口708对准。
在某些实施例中,马达位置传感器2724是磁传感器,例如,霍尔效应传感器,其可以检测磁环2600的取向,所述磁环2600连接到包含有开口2518的第二壁部分2512。马达位置传感器2724、微控制器2700和马达方向控制2726的组合可以充当简单的反馈电路以确保马达2722正确地取向。在某些实施例中,PCB 2508还可以包括其它传感器,例如,温度传感器,并且可以适于包括光、电或化学诊断以用于研究室706中所取得的样本。在某些实施例中,微控制器2700还可以适于感测室(例如,室706)的位置。例如,通过使用磁感测分单元2602与嵌入室的壁中的磁体组合。
微控制器2700致动和监测各种传感器和感测分单元2708、2710、2712以将其自身定位在胃肠道内。例如,微控制器2700可以操作轴向和径向感测分单元2708和2701以闪现不同颜色的光和使用感测分单元中的光传感器来检测所得到的反射率。类似地,在某些实施例中,微控制器2700也可以从温度传感器获得温度数据。这些所检测的数据值被存储为日志(例如,在存储器分单元2702的EEPROM存储器2706中),所述日志可以随后被检索以用于事后分析或执行本申请中所述的定位算法中的一个。
图28示出与设备的某些实施例相对应的固件。具体地,图28示出固件2800和软件系统,所述固件2800和软件系统可以在某些实施例中用于控制PCB 2508和可摄取设备2500的操作。固件2800在制造时或在授权服务时间期间被安装到微控制器2700的内部非易失性闪存存储器2704中,并且通常在安装在可摄取设备2500上之后不会改变或不会被重新编程。在某些方面中,这可以通过以下来实现,即,使编程引线(即,物理连接以写入或重新写入闪存存储器2704)被容纳在可摄取设备2500的外壳内,或使编程引线被印刷到柔性电路板的部分上以用于构造PCB 2508,所述PCB 2508在固件2800已经安装之后被物理上切断。
固件2800控制设备的各种功能,如图28中所示。显而易见地,固件2800用指令编码,所述指令可以控制微控制器2700的功能并且通过代理可以控制图27中所述的系统。实时时钟(RTC)和动力循环控制2802确定微控制器2700如何与RTC振荡器2716通信和相互作用。在某些实施例中,可摄取设备2500大部分时间被设定成睡眠,使各种设备功能禁用以保存能量。可摄取设备2500在预定的时间处被设定成苏醒,采集传感器数据,周期性地分析所采集的数据,根据需要执行作用(取样,识别出GI特征)并且返回到睡眠。将较大百分比的时间维持在睡眠模式中可以保存板载电源储备。动力循环控制2802允许可摄取设备2500以适当的间隔苏醒。随后参照图29和图30示出用于基于这些睡眠和苏醒间隔控制设备的操作的两个示例性方法。马达位置和磁感测控制2804包含有用于允许微控制器2700与马达位置传感器2724相互作用的指令。在某些实施例中,马达位置传感器2724由其它类型的磁感测单元(例如,磁感测单元2602)替换,所述其它类型的磁感测单元可以用于确定可摄取设备的各种部分的位置和取向。马达控制2806包含有用于允许微控制器2700经由GPIO操作马达方向控制2726并且控制马达2722的运动的指令。在某些实施例中,马达2722可以与齿轮马达704为同一个马达,但是在某些实施例中可以使用其它类型的马达。
内部EEPROM存储控制2808包含有驱动器以用于允许微控制器2700与EEPROM存储器2706相互作用。内部闪存控制2810包含有类似的驱动器以用于允许微控制器2700与闪存存储器2704相互作用。反射率传感器控制2812包含有用于微控制器2700的指令以获取和量化由光传感器(例如,感测分单元2708、2710和2712的光感测半部分或检测器1904)所检测的光。在某些实施例中,任何反射率(即,反射到检测器上的光)将促使检测器产生与所检测的光量直接成比例的电压或电流。这传入ADC中,并且所得到的数字信号可以被微控制器2700使用以量化在反射中所接收的光量。反射率传感器LED控制2814包含有这样的指令,即,所述指令用于使微控制器2700操作可摄取设备2500的各种照明器(例如,感测分单元2708、2710、2712的LED半部分或照明器1902a和1902b)。通过使用GPIO,微控制器1700可以控制何时LED发光或就RGB-LED包而言控制正产生的光的颜色(即,选取不同的波长以用于照明)。串行通信控制2816包含有这样的指令,即,所述指令用于操作IR光接收器/发送器2714以使用通用异步接收器/发送器(UART)将信号传送到设备和从设备传送光。例如,微控制器2700可以将数字脉冲序列编码到IR发送器上(例如,使用光编码器20)以与基站(例如,基站950)通信。类似地,IR接收器可以用于从基站接收信号,允许医生设定设备参数或对可摄取设备2500的所选特征部重新编程。
虽然固件2800主要参照通过图27所述的电气子系统来讨论,但是类似的固件可以用于控制可摄取设备中的其它电气系统(例如,通过图2A至图2E和图15所述的系统)。如以上参照RTC和动力循环控制2802所述,固件可以包含有这样的指令,即,所述指令通过将可摄取设备2500设定成在睡眠模式中耗费明显大部分的时间而保存设备电力并且以定期的间隔取得样本和执行全方位的设备功能。在这些实施例中,固件2800具有两个主要执行路径,主程序慢循环和基于计时器的快循环。主程序慢循环在图30A至图30B中示出,并且其可以运行预定的任务的列表。主程序慢循环中的每个任务都可以以固定的速率执行并且响应于不确定的外部事件,例如,从光传感器(例如,从感测分单元2708、2710、2712)所取得的新数据。相比之下,基于计时器的快循环将周期性地中断主程序慢循环并且关心需要以频繁间隔高速处理的过程。
图29是说明了某些实施例和过程的流程图,所述过程用于从睡眠或备用状态唤醒可摄取设备并且操作可摄取设备。在某些方面中,唤醒处理2975控制设备的操作并且将间隔设定成中断可摄取设备2500的睡眠或备用状态,促使其苏醒和执行图30A至图30B中所示的慢循环处理,以及快循环处理2950。快循环处理2950可以周期性地中断慢循环处理并且关心需要以频繁间隔高速处理的过程。例如,在可摄取设备2500苏醒之后,慢循环处理可以跟踪接下来需要完成哪一个任务(例如,采集数据或运行定位算法),而快循环处理2950可以监测外部通信(例如,来自基站950(图17A至图17C)的通信)和操作传感器。
在快循环处理2950的步骤2900处,可摄取设备2500通过快循环处理2950中断慢循环处理。为了执行高速处理,快循环处理2950可以在高于6kHz的频率下中断可摄取设备2500并且对其采取控制。
在步骤2902处,可摄取设备2500检查外部通信。例如,可摄取设备2500可以检查是否由IR光接收器2714从基站950接收信号。在某些实施例中,可摄取设备2500还可以配备有其它类型的无线通信手段,例如,蓝牙、近场通信、RF收发器和类似物。在这些情况下,可摄取设备2500可以在步骤2902处监测任何类型的通信。在某些实施例中,如果检测到通信,则可摄取设备2500可以继续监测通信,直到通信完成为止。
在步骤2904处,可摄取设备2500检查是否自从最后一次时间计数器在步骤2906处被递增之后已经经过了一毫秒。在某些方面中,这可以允许可摄取设备2500在步骤2902处以较高的频率检查通信和以较低的频率执行其它操作(例如,在步骤2910、2912、2914和2916处检修传感器)。在某些实施例中,可摄取设备2500可以通过在步骤2904处使计数器递减并且在步骤2906处重置计数器而数出(count out)一毫秒的间隔。例如,如果处理2950在6kHz的频率下重复,则计数器将最初被设定为“6”并且快循环处理2950将在可摄取设备进入步骤2906之前重复6次,促使可摄取设备2500以一毫秒的间隔进入步骤2906。如果自从最后一次时间计数器在步骤2906处递增之后已经经过了一毫秒,则可摄取设备2500进入步骤2906,否则可摄取设备2500进入步骤2918。
在步骤2906处,可摄取设备2500将递增时间计数器,跟踪自从设备苏醒之后的毫秒数。在某些方面中,时间计数器可以被可摄取设备用于确定已经多长时间进入慢循环处理的特定步骤。例如,在某些实施例中,慢循环处理可以指示何时可摄取设备2500使马达(例如,马达2720或704)运动以打开室706和取得样本,并且时间计数器可以被慢循环处理用于确定室706已经打开了多久时间。
在步骤2908处,可摄取设备2500选取传感器以取样。在某些实施例中,可摄取设备2500将按顺序对传感器取样,选取传感器来每一毫秒取样。例如,可摄取设备2500可以在第一迭代期间进入步骤2910,在第二迭代期间进入步骤2912,在第三迭代期间进入步骤2914并且在第四迭代期间进入步骤2916,并且继而在所有传感器已经被取样之后重复该顺序。在某些实施例中,某些传感器可以经常比其它传感器或多或少地取样。例如,温度传感器可以在可摄取设备处于小肠中的同时被忽略,并且可摄取设备2500可以根本不进入步骤2912。在某些实施例中,可摄取设备2500在传感器被取样的同时将数据与传感器通信,但是传感器将在不被取样的同时持续操作。例如,每当可摄取设备2500对径向感测分单元取样时,它可以确定是否特定的径向LED应当被开启或被关闭或留在其当前状态中,并且径向LED将在被被感测的同时坚持处于当前状态中。在可摄取设备2500的某些实施例中,选取要取样的传感器可以另外地包括使用多路复用器。
在步骤2910处,可摄取设备2500使用电压传感器来诊断电气系统(例如,通过图27所述的电气系统)内的可能故障。例如,可摄取设备2500可以使用GPIO测试通向各种分单元(例如,马达2722)的通信,并且可摄取设备可以确定由电池18所供应的当前电压。在某些实施例中,在所感测的电池18的电压高于阈值时,可摄取设备2500可以仅操作马达(例如,马达704或2722)。
在步骤2912处,可摄取设备2500使用温度传感器来收集温度测量值。例如,可摄取设备2500可以收集温度测量值以确定进入身体或从身体离开。在某些实施例中,温度测量值还可以用于推断出胃肠道内的其它位置。例如,在某些实施例中,可摄取设备2500可以确定温度的突然变化(例如,由于病人摄取热餐或冷饮)指示可摄取设备可以位于胃中。
在步骤2914处,可摄取设备2500使用径向传感器(例如,径向感测分单元32和2710)来收集径向反射率数据。例如,可摄取设备2500可以使用微控制器2700指导径向感测分单元2710来闪现特定波长的光和测量所得到的反射率。这样做可以收集径向反射率数据(例如,用于径向反射率数据系列602(图13A至图13B),或所检测的红光反射率2426、绿光反射率2428或蓝光反射率2430(图24))。另外地,在某些实施例中,可摄取设备2500可以测试径向感测分单元以检测设备故障。例如,如果第一径向照明器在径向检测器中的任一个中不产生所引起的信号,但是其它径向照明器如此,则可摄取设备2500可以确定第一径向照明器没有适当地发挥功能。
在步骤2916处,在某些实施例中,可摄取设备2500使用轴向传感器(例如,轴向感测分单元42、2708和2712)来收集轴向反射率数据。这样做可以收集轴向反射率数据(例如,用于轴向反射率数据系列604(图13A至图13B)或所检测的红外反射率2432(图24))。另外地,在某些实施例中,可摄取设备2500可以使用这些数据检测胃肠道设备内的异常或可能的设备故障。例如,如果可摄取设备2500由于医疗异常而测量多个异常数据点,则可摄取设备2500可以使用快循环处理2950在异常附近收集更多的数据点。
在步骤2918处,可摄取设备2500终止快循环处理2950并且返回到睡眠状态。然而,在某些实施例中,快循环处理2950可以此后几乎立刻又重新开始。
RTC唤醒处理2975与快循环方法步骤2900有区别,并且在某些方面中RTC唤醒处理2975可以基于节电装置(例如,作为RTC和动力循环控制2802(图28)的一部分)控制设备的操作。当可摄取设备2500临时进入睡眠状态时,RTC振荡器2716继续运行并且跟踪时间流逝。微控制器2700配置成基于RTC振荡器2716输出而每隔一定时间唤醒可摄取设备2500并且执行设备的初级取样和数据收集功能。
在步骤2920处,可摄取设备2500从RTC振荡器2716接收信号而苏醒。在某些方面中,这可以以介于一秒和10分钟之间的间隔发生,并且在其它方面中,间隔可以取决于可摄取设备的当前位置以及可摄取设备设定和能量储备。例如,虽然在胃中(例如,在起点2402或胃2404(图24)中),可摄取设备2500可以被唤醒并且每隔一秒取得数据样本。在小肠中(例如,在十二指肠2406和空肠2408(图24)中),在围绕可摄取设备2500的环境中有较小的可变性,而且设备可以被唤醒,并且反而每30秒取得数据样本。
在步骤2922处,可摄取设备2500苏醒并且开始执行设备的快/慢循环操作,所述快/慢循环操作参照图30A至30B和处理2950所述。
在步骤2924处,可摄取设备2500已经完成收集新数据集并且执行定位算法,并且可摄取设备2500返回到睡眠或备用状态。依据设备设定,可摄取设备2500可以在预定的时间段之后再次将RTC振荡器配置成唤醒设备。
预料到,图29的步骤或说明可以供本申请的任何其它实施例使用。另外,参照图29所述的步骤和说明可以按可替代的次序或进一步与本申请的目的并行地实现。例如,并行地执行通过步骤2910、步骤2912、步骤2914和步骤2916所述的步骤可以减少延迟或允许所收集的数据点被同步到特定的时间。此外,应当注意到,在本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图29中的步骤中的一个或多个。
图30A至图30B是根据设备的某些实施例的、示出可摄取设备的慢循环操作的各种方面的流程图。可摄取设备(例如,可摄取设备2500)可以在睡眠或备用状态中耗费大部分的时间,以便保存能源储备。在某些方面中,每当可摄取设备2500苏醒时,快循环处理2950和慢循环处理3050将为了收集数据而运行,运行定位算法以确定设备的位置,并且根据需要取得样本。
慢循环处理3050在步骤3000处开始。在步骤3000处,可摄取设备2500通过实时时钟(例如,在唤醒处理2975的步骤2922处)、磁体(例如,从激活磁开关162(图2A))、通过看门狗算法而被唤醒。在某些方面中,看门狗算法将防范使程序执行暂停的错误。在某些实施例中,看门狗算法将包括独立的硬件计时器,所述独立的硬件计时器将周期性地检查各种设备功能、传感器和/或硬件/软件系统,并且所述独立的硬件计时器仅在检查过的功能和/或系统全部被正确地操作的情况下允许可摄取设备2500操作。例如,如果可摄取设备2500不能与传感器建立起连接,则可摄取设备2500可以通过设定RTC警报并且进入睡眠或备用状态而重置自身。
在步骤3002处,系统状态从存储器读取。例如,可摄取设备2500的当前状态可以被存储在闪存存储器2704中。状态可以指示可摄取设备2500在胃肠道内的当前位置。状态还可以指示是否可摄取设备2500已经被编程并且适当地初始化。例如,该状态可以指示在将可摄取设备2500施用给病人之前医生或技师是否适当地装配可摄取设备2500。
在步骤3004处,可摄取设备2500判定是否已经被适当地编程。如果可摄取设备2500已经被编程,则流程可以进入步骤3006,如果可摄取设备2500还没有被编程,则流程可以反而进入步骤3030。
在步骤3006处,可摄取设备2500判定是否已经通过实时时钟(例如,在唤醒处理2975的步骤处2922处)被唤醒。如果可摄取设备2500已经通过实时时钟被唤醒,则流程可以进入步骤3008,并且否则进入步骤3024。
在步骤3008处,可摄取设备2500从设备上的各种传感器(例如,从轴向和径向感测分单元2708、2710和2712(图27))收集数据。感测模式和数据采集模式可以基于可摄取设备2500的预期用法而不同,但是在某些实施例中,可摄取设备将收集红光、绿光、蓝光和红外反射率数据样本,以及温度测量值。
在步骤3010处,可摄取设备2500将在步骤3008处所收集的传感器数据记录到内部存储器(例如,记录到存储器分单元2702(图27))。在可摄取设备2500中,数据日志被记录到50kB的内部闪存存储器(例如,闪存存储器2704(图27)),并且当由外部系统请求时可以被检索,但是在某些实施例中不同量的存储器会是可用的。在某些方面中,数据日志将包括通过算法导出或从RTC振荡器2716取得的胶囊运送时间以及与红光、绿光、蓝光和红外反射率相对应的一整套传感器数据连同温度测量值一起。
在步骤3012处,可摄取设备2500运行定位算法(例如,如通过图9至13或图24所述)以确定设备的位置。在某些方面中,可摄取设备2500通过分析在步骤3008处取得的传感器数据或使用存储在闪存存储器(例如,闪存存储器2704)中的上一个和当前的传感器数据的数据集而实现如此。例如,可摄取设备可以使用十二指肠检测算法确定从胃(例如,胃2404(图24))到十二指肠(例如,十二指肠2406(图24))中的幽门过渡(例如,幽门过渡2416(图24))。
在步骤3014处,可摄取设备2500判定是否将收集实体样本。例如,可摄取设备2500可以被编程为只要在步骤3012处识别出胃肠道的特定区域就收集样本。可摄取设备2500还可以被编程为在步骤3012处识别出胃肠道的特定区域之后的一定时间量收集样本。例如,可摄取设备2500可以被编程为只要检测到空肠就收集样本或在检测到十二指肠之后的10分钟收集样本。如果可摄取设备2500将收集样本,则可摄取设备2500可以进入步骤3016,并且否则会进入步骤3018。
在步骤3016处,可摄取设备2500使用马达运动算法收集实体样本。这可以通过促使设备从不允许材料进入样本室中的一种配置改变成允许材料进入样本室中的第二配置来实现。例如,可摄取设备2500可以使用微控制器2700将信号传输到马达2722而使第二壁部分2512运动并且将开口2518与室开口708对准。在预定的时间段例如10分钟之后,可摄取设备2500还可以促使马达2722将开口2518远离室开口708转动,用内部的样本密封住室706。
在步骤3018处,可摄取设备2500可以判定是否已经达到传感器日志的最大数量。在某些实施例中,可摄取设备2500将具有可用于存储传感器数据的50kB的闪存存储器。在某些实施例中,这依据传感器的数量、数据格式和所使用的精度而足以用于记录约5000个至10000个样本。在某些实施例中,可摄取设备2500还可以去除数据样本或将数据样本存储在压缩格式中。例如,可摄取设备2500可以在不再需要用于定位之后去除所有其它的数据样本,对于医师或医生而言留下足够的分辨率,以便后来解释数据。对于较大程度上冗余或线性的数据(例如,在身体内取得的温度数据)而言,可摄取设备2500可以将数据集的部分近似为线性函数,存储起点和终点,并且减少所需的存储器的总量。如果已经达到日志的最大数量,则可摄取设备2500可以进入步骤3022,否则可摄取设备2500会进入步骤3020。
在步骤3020处,可摄取设备2500设定实时时钟唤醒警报。在某些实施例中,可摄取设备2500可以配置成设定警报以唤醒设备并且在稍后的时间里收集新的数据集。在某些方面中,在睡眠和苏醒之间的间隔是介于一秒和10分钟之间。当警报响起(例如,在处理2975的步骤2920处),可摄取设备2500从睡眠或备用状态中断,并且处理3050将重复。
在步骤3022处,可摄取设备2500将进入深度睡眠或备用状态。在某些实施例中,如果没有设定RTC唤醒警报,则可摄取设备2500将通过默认的方式进入深度睡眠中并且暂停某些设备功能。在某些实施例中,可摄取设备2500在备用状态中关掉某些设备功能,但是将继续监测实时时钟(例如,RTC振荡器2716(图27))以确定何时可摄取设备2500重新开始操作。
在步骤3024处,可摄取设备2500将能够通信。在某些实施例中,可摄取设备2500可以停用通信以保存能量储备和避免耗尽电池18。然而,在某些实施例中,在可摄取设备2500通过除了RTC警报以外的某物唤醒的情况下,可摄取设备2500将检查外部通信(例如,从基站950经由IR光接收器2714)。这可以通过对IR光接收器2714或通信分单元120供电和操作来实现。在某些实施例中,可摄取设备2500可以使用其它类型的通信,例如,射频(RF)、蓝牙或其它可以按要求开启和关闭的近场通信(NFC)。
在步骤3026处,可摄取设备2500检查外部通信。例如,在某些实施例中,在可摄取设备2500激活通信(例如,通信分单元120)之后,可摄取设备2500可以监测IR光接收器2714以用于从基站950通信。
在步骤3028处,可摄取设备2500将在20秒内等待传入的通信。如果在20秒内没有检测到通信,则可摄取设备2500将关闭通信以保存能量。在某些实施例中,可摄取设备2500可以等待不同的时间段,或者无论何时接收到传入的通信都可以重置20秒计时器。
在步骤3030处,在可摄取设备2500还没有被编程的情况下,可摄取设备2500将通过默认的方式能够通信。在某些实施例中,在将设备施用给病人之前,可摄取设备2500需要由医生或技师被编程或初始化。如果在可摄取设备2500上没有发现编程,则将通过默认的方式能够通信和等待编程指令。
在步骤3032处,可摄取设备2500将等待来自用户的编程指令。在某些实施例中,用户可以设有计算机、手机、平板电脑或监视应用程序、无线电收发器、基站或类似物,用于与可摄取设备2500通信。例如,用户可以设有基站950,所述基站950能够将红外信号传输到可摄取设备2500,所述红外信号将被检测和解释(例如,由IR光接收器2714检测且由通信分单元120解释的信号)。
在步骤处3034,可摄取设备2500将等待传感器采集完成。在可摄取设备2500开始接收传入的通信信号之后,可摄取设备2500将等待,直到已经接收完全的通信为止。例如,对于用户而言会花费几分钟对可摄取设备2500编程,并且可摄取设备2500在接收指令的同时将保持通信通道畅通。
在步骤3036处,可摄取设备2500将检查在最后20秒内是否已经接收通信。与步骤3028类似,如果在20秒内没有检测到通信,则可摄取设备2500将关闭以保存能量。在某些实施例中,可摄取设备2500可以等待不同的时间段。
将应理解,包括图30A至图30B在内的本公开的流程图的步骤和描述仅仅是说明性的。在不脱离本公开的范围的情况下,包括图30A至图30B在内的流程图的步骤和描述中的任一个可以被修改、被省略、被重新布置、被轮流或并行执行,步骤中的两个或更多个可以被组合,或者任何额外的步骤可以被添加。例如,可摄取设备2500可以继续采集新数据样本并且与正采集样本同时地运行定位算法。此外,应当注意到,图30A至图30B的步骤和描述可以与本申请中所述的任何其它系统、设备或方法组合,并且本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图30A至30B中的步骤中的一个或多个。
图31是根据设备的某些实施例的、示出设备的总体操作的流程图。在某些方面中,样本操作处理3150描述了使用可摄取设备从病人的胃肠道产生样本。虽然图31可以参照可摄取设备2500说明以用于说明的目的,但是这意在不是限制性的,并且图31中描述的处理的任一部分或整个可以被应用到在本申请中所讨论的任何设备(例如,可摄取设备10、300、302、304、306、700和1900),并且可摄取设备中的任一个可以用于执行图31中描述的处理的一个或多个部分。此外,图31的特征可以与本申请中所述的任何其它系统、方法或处理组合。例如,通过图31所述的处理可以利用图2、图15、图27和图28中的硬件和电气系统或图8至图13、图21至图24或图32至图33中的定位方法。
在步骤3100处,可摄取设备2500将检测是否已经通过从磁体分开而被激活。如在图2A中所述,可摄取设备(例如,可摄取设备2500)可以具有用于开启或关闭设备的磁开关162。在制造之后,可摄取设备可以被置于在磁体附近的专用容器中并且所得到的磁场保持磁开关162处于“Off”位置。当可摄取设备2500准备由用户编程并且将施用给病人时,可摄取设备2500远离磁体运动,并且磁开关162将改变到“On”位置。一旦可摄取设备2500被第一次开启,它会尝试建立通信。
在步骤3102处,可摄取设备2500将等待用户经由UART输入。可摄取设备设有通信分单元(例如,通信分单元120),其可以用于经由UART(例如,通用异步接收器/发送器(UART)接口114)与可摄取设备2500通信。可摄取设备2500将继而为用户提供对设备编程的机会。在某些实施例中,可摄取设备2500可以随同基站或基座一起设置,所述基站或基座可以连接到计算机、平板电脑、手持设备、智能手机或智能手表;例如,用于用户对可摄取设备2500编程。在某些实施例中,可摄取设备2500还可以使用其它手段通信,例如,射频、蓝牙、近场通信和类似物,它们全部可以用于对可摄取设备2500编程或从可摄取设备2500检索信息。在某些方面中,可摄取设备2500在由用户编程和初始化之后被施用给病人。
在步骤3104处,可摄取设备2500将执行感测、记录数据和执行定位算法以确定设备的位置。在被施用给病人之后,可摄取设备2500将继续从传感器收集数据、记录数据和执行定位算法以基于所收集的数据识别出设备的位置。例如,可摄取设备2500可以随着其通过胃肠道运送而收集一套轴向和径向数据并且参照图8至图13所述执行定位算法。作为另一个示例,可摄取设备2500可以从照明以不同的波长收集反射率数据集并且执行参照图24所述的定位算法。在某些方面中,可摄取设备2500随着其进入小肠的十二指肠部分(例如,十二指肠2406)将尝试识别出幽门过渡(例如,幽门过渡2416(图24))。一旦可摄取设备2500确定位于十二指肠中,可摄取设备可以取得样本或在取得样本之前等待预定的时间段(例如,10分钟)。
在步骤3106处,可摄取设备2500将收集样本并且继续收集和记录传感器数据。在定位十二指肠之后,可摄取设备可以通过提供通向取样室(例如,室706)的通路而在设备周围的环境中从胃肠道取得样本。例如,可摄取设备2500可以使用马达(例如,马达704、2722)将设备从不允许样本从胃肠道进入取样室的一种配置改变到允许样本从胃肠道进入取样室的另一种配置。这可以通过以下来实现,即,将信号从微控制器2700传输到马达2722而使第二壁部分2512运动,使得开口2518与用于取样室的室开口708对准。类似地,在等待一定的时间段之后,可摄取设备2500可以在已经获得样本之后使第二壁部分2512运动返回以密封住取样室。随着样本正被收集,以及后来,可摄取设备2500将继续测量和记录传感器数据。
在某些实施例中,可摄取设备2500将配置成释放药剂而不是收集样本。例如,在可摄取设备2500被施用给病人之前,室706可以设有药物、粉末、液体或其它药剂。在某些实施例中,用户可以具有将药剂装载到室706中的能力。例如,在可摄取设备2500正被编程(例如,由用户使用基站950)的时间期间,用户可以具有将指令传输到可摄取设备2500而通过转动第二壁部分2512来暴露室706的能力。
在某些实施例中,可摄取设备2500将配置成使用诊断来研究所捕获的样本。例如,每个室706都还可以包含有亲水泡沫或海绵以帮助采集样本。另外地,该亲水泡沫或海绵可以设有或没有生物制剂以用于固定或检测目标分析物,将室706有效地修改成取样和诊断室。这可以与其它诊断和化验技术结合以诊断或检测不同的条件,所述不同的条件会影响胃肠道的特定部分。
在步骤3108处,可摄取设备2500甚至在已经获得一个或多个样本之后将继续收集和记录传感器数据。在某些方面中,可摄取设备2500将继续记录传感器数据,直到已经收集最大数量的数据日志为止。
在步骤3110处,可摄取设备2500在达到最大操作时间、检测从身体离开或记录最大数量的数据样本之后将进入深度睡眠状态。在某些方面中,可摄取设备2500在深度睡眠状态中关闭一些设备功能,直到可摄取设备苏醒为止。在某些实施例中,可摄取设备2500可以使用提供给用户的磁体或基站而被唤醒。在某些实施例中,病人可以在已经离开身体之后检索可摄取设备2500,并且所收集的样本和数据日志可以从所检索的设备采集。在某些实施例中,可摄取设备可以在体内使用无线通信技术,例如,RF、蓝牙或近场通信以将所收集的数据传输到计算机、基站、平板电脑、手机、智能手表或其它类似的设备。
在步骤3112处,可摄取设备2500可以在由用户检索之后经由UART被唤醒。在其中设备已经被用户检索的那些实施例中,所检索的设备可以被带回到基站(例如,基站950)或类似地配备的计算机以用于数据和样本检索。在某些实施例中,可摄取设备2500通过暴露于磁体也将从其深度睡眠苏醒;例如,可以被设置为基站950的一部分的磁体。
在步骤3114处,可摄取设备2500将已经完成其操作并且将为用户提供检索实体样本的能力。在从深度睡眠状态检索和重新激活之后,可摄取设备2500可以自动地将所采集的数据通信回到用户并且该可摄取设备可以提供通向室706的通路。在某些实施例中,用户或认证的技师可以设有用于直接从可摄取设备2500采集实体存储器和样本的装置。例如,通过将用于拆卸可摄取设备2500的专用工具提供给已授权的个人,任何可能敏感的数据或样本可以受保护以防被未授权的用户访问。
将应理解,包括图31在内的本公开的流程图的步骤和描述仅仅是说明性的。在不脱离本公开的范围的情况下,包括图31在内的流程图的步骤和描述中的任一个可以被修改、被省略、被重新布置、被轮流或并行执行,步骤中的两个或更多个可以被组合,或者任何额外的步骤可以被添加。例如,可摄取设备2500可以在采集样本之后立即进入深度睡眠状态,以便保存能量。此外,应当注意到,图31的步骤和描述可以与本申请中所述的任何其它系统、设备或方法组合,并且本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图31中的步骤中的一个或多个。
图32是示出由设备所使用的盲肠检测算法的某些方面的流程图。虽然图32可以参照可摄取设备2500所述以用于说明的目的,但是这意在不是限制性的,并且图31中描述的盲肠检测处理3250的任一部分或整个可以被应用到在本申请中所讨论的任何设备(例如,可摄取设备10、300、302、304、306、700和1900),并且可摄取设备中的任一个可以用于执行图32中描述的处理的一个或多个部分。此外,图32的特征可以与本申请中所述的任何其它系统、方法或处理组合。例如,通过图32中所述的算法的部分可以被集成到通过图24所述的算法中的任一个中。
在步骤3200处,可摄取设备2500苏醒。这会由于由可摄取设备2500所设定的先前设定的RTC警报而实现。
在步骤3202处,可摄取设备2500收集和存储新的传感器数据点。可摄取设备2500通过闪现不同颜色的LED(例如,照明器1902a和1902b)而产生在红色波长和绿色波长的照明并且通过检测(例如,通过检测器1904)来自围绕可摄取设备2500的环境的、所得到的反射率来开始。这些数据点继而被存储在闪存存储器中。
在步骤3204处,可摄取设备2500判定是否已经检测到十二指肠。例如,如果可摄取设备2500的当前状态是DUODENUM或JEJUNUM状态,或如果十二指肠检测算法已经确定发生幽门过渡(例如,幽门过渡2416)。
在步骤3206处,可摄取设备2500将从闪存存储器(例如,闪存存储器2704)装载最后“n”个所存储的光传感器值。点数量“n”应当足够大以计算统计上明显的平均数和标准偏差,但是在许多方面中选取值30。
在步骤3208处,可摄取设备2500计算组内(intra-set)的标准偏差。
在步骤3210处,可摄取设备2500计算组内的平均值。
在步骤3212处,可摄取设备2500将红色数据与绿色数据比较。在某些实施例中,这可以涉及从红色数据的平均值减去红色标准偏差的倍数和从绿色数据的平均值减去绿色标志偏差的倍数。在某些实施例中,倍数“k”被选择为约1.5。在某些实施例中,倍数可以在将设备施用给病人之前由用户编程,或者倍数可以基于所测量的传感器数据来改变。如果不满足步骤3212中的条件,则可摄取设备2500认为数据点不可靠,并且该数据点不被考虑。
在步骤3214处,可摄取设备2500增大积分器的值。在某些实施例中,可摄取设备2500将绿色数据的平均值与红色数据的平均值之间的差值添加到积分器。在某些实施例中,可摄取设备2500可以在将该差值添加到积分器之前通过绿色数据的平均值而将差值归一化。在某些实施例中,积分器将递增一,而不是添加绿色数据和红色数据之间的差值。在某些实施例中,积分器还可以被周期性地重置为零或每当执行算法时减少一定的比例。可摄取设备2500存储积分器的值并且使用该值确定何时已经发生过渡到盲肠。
在步骤3216处,可摄取设备2500将积分器与检测阈值比较以判定是否已经发生过渡。在某些实施例中,阈值将是平均绿色或蓝色测量值的倍数,例如,平均绿色测量值的十倍。在某些实施例中,当在步骤3214处积分器被递增一时或当在步骤3214处添加到积分器的值已经被归一化时,阈值可以是预定的数。在某些实施例中,预定的数可以是基于有多频繁收集传感器数据,或者预定的数可以在将设备施用给病人之前被编程到设备中。
在步骤3218处,可摄取设备2500确定已经发生回盲肠过渡并且设备现在处于盲肠中。这在算法确定在平均红光反射率数据与平均绿光反射率数据之间的综合差值高于阈值之后来实现。
在步骤3220处,可摄取设备2500进入深度睡眠状态。然而,在某些方面中,可摄取设备2500可以设定RTC振荡器警报,其将可摄取设备2500从其睡眠唤醒以取得其它数据样本并且根据需要执行额外的定位算法。
将应理解,包括图32在内的本公开的流程图的步骤和描述仅仅是说明性的。在不脱离本公开的范围的情况下,包括图32在内的流程图的步骤和描述中的任一个可以被修改、被省略、被重新布置、被轮流或并行执行,步骤中的两个或更多个可以被组合,或者任何额外的步骤可以被添加。例如,可摄取设备2500可以并行计算多个数据集的平均值和标准偏差,以便加速总体计算时间。此外,应当注意到,图32的步骤和描述可以与本申请中所述的任何其它系统、设备或方法组合,并且本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图32中的步骤中的一个或多个。
图33是示出由设备所使用的十二指肠检测算法的某些方面的流程图。虽然图33可以参照可摄取设备2500所述以用于说明的目的,但是这意在不是限制性的,并且图33中描述的十二指肠检测处理3350的任一部分或整个可以被应用到在本申请中所讨论的任何设备(例如,可摄取设备10、300、302、304、306、700和1900),并且可摄取设备中的任一个可以用于执行图33中描述的处理的一个或多个部分。此外,图33的特征可以与本申请中所述的任何其它系统、方法或处理组合。例如,通过图33中所述的算法的部分可以被集成到通过图24所述的算法中的任一个中。
在步骤3300处,可摄取设备2500苏醒。可摄取设备2500基于RTC振荡器将每隔一定时间正常地苏醒。一旦可摄取设备2500苏醒,可摄取设备将继续进行处理的其余部分。
在步骤3302处,可摄取设备2500收集和存储新的传感器数据点。可摄取设备2500通过闪现不同颜色的LED(例如,照明器1902a和1902b)而产生在红色波长和绿色波长的照明来开始。可摄取设备2500继而检测(例如,通过检测器1904)所得到的反射率并且将数据存储在存储器中。
在步骤3304处,可摄取设备2500将从闪存存储器(例如,闪存存储器2704)装载最后“n”个所存储的光传感器值。点数量“n”应当足够大以计算统计上明显的平均数和标准偏差,但是在许多方面中选取高于30的值。
在步骤3306处,可摄取设备2500计算组内的标准偏差。
在步骤3308处,可摄取设备2500计算组内的平均值。
在步骤3310处,可摄取设备2500将红色数据与绿色数据比较。与步骤3212(图32)类似,在某些实施例中,这可以涉及从红色数据的平均值减去红色标准偏差的倍数和从绿色数据的平均值减去绿色标志偏差的倍数。如果不满足步骤3310中的条件,则可摄取设备2500会不进一步考虑该数据点。
在步骤3312处,可摄取设备2500增大积分器的值。与步骤3214(图32)类似,在某些实施例中,可摄取设备2500将绿色数据的平均值与红色数据的平均值之间的差值添加到积分器,并且在某些实施例中,积分器将递增一,而不是添加绿色数据和红色数据之间的差值。可摄取设备2500可以继而使用积分器中的所存储的值以确定何时已经发生过渡到十二指肠。
在步骤3314处,可摄取设备2500将积分器与检测阈值比较以判定是否已经发生过渡。阈值可以取决于多个因素,例如,参照步骤3216(图32)所述的那些因素。另外地,阈值可以取决于可摄取设备2500中所使用的部件,并且可以基于所检测的信号的大小而变化。
在步骤3316处,可摄取设备2500确定已经发生幽门过渡并且目前位于十二指肠中。这在算法确定在平均红光反射率数据与平均绿光反射率数据之间的综合差值高于阈值之后来实现。
在步骤3318处,可摄取设备2500进入深度睡眠状态。然而,在某些方面中,可摄取设备2500可以设定RTC振荡器警报,其将可摄取设备2500从其睡眠唤醒以取得其它数据样本并且根据需要执行额外的定位算法。
在步骤3320处,可摄取设备2500将积分器重置为0。在某些方面中,这在当可摄取设备2500确定最新采集的数据不可靠时进行。
将应理解,包括图33在内的本公开的流程图的步骤和描述仅仅是说明性的。在不脱离本公开的范围的情况下,包括图33在内的流程图的步骤和描述中的任一个可以被修改、被省略、被重新布置、被轮流或并行执行,步骤中的两个或更多个可以被组合,或者任何额外的步骤可以被添加。例如,可摄取设备2500可以并行计算多个数据集的平均值和标准偏差,以便加速总体计算时间。此外,应当注意到,图33的步骤和描述可以与本申请中所述的任何其它系统、设备或方法组合,并且本申请中所讨论的可摄取设备或系统中的任一个可以用于执行图33中的步骤中的一个或多个。
图34是根据设备的某些实施例的、来自通过个人的GI道快速运送的示例的数据。图表3400示出随着可摄取设备通过胃肠道运送,由闪现不同波长的光的可摄取设备所收集的样本数据集。该原始数据示出由与可摄取设备1900类似地配置的且与参照图21至图24所述的方法类似地采集数据的可摄取设备所进行的实际运送。图34还示出在摄取设备之后食用冷饮和/或食物超过30分钟不改变设备的温度读数,这指示设备在30分钟之前离开了胃。
与在图24的绿光反射率数据2426和蓝光反射率数据2428中所示的表现类似,可以看到,径向绿色和径向蓝色数据集紧密地遵循彼此并且以较为平坦的检测值遵循类似的图案。而且,与图24的红光反射率数据2430类似,可以看到,随着可摄取设备1900经历幽门过渡(例如,幽门过渡2416(图24)),在第一小时的标记附近,红色数据集开始迅速地从蓝色和绿色数据集发散。介于第二小时与第三小时之间,对红色波长照明和轴向红外照明的响应基本增大,在第三小时标记附近达到顶点。这与穿过十二指肠(例如,十二指肠2406(图24))达到至空肠中的屈氏韧带过渡(例如,至空肠2408(图24)中的屈氏韧带过渡2418)的运送对应。从第三小时至第五小时,在所检测的红光反射率和轴向红外反射率中的降低与通过空肠的运送一致,并且在第五小时标记附近发生回盲肠过渡(例如,回盲肠过渡2420(图24))。从第五小时标记至第七小时标记,对所检测的红外反射率的响应相对于红光反射率的增大类似地与盲肠过渡到大肠中(例如,盲肠过渡2422到大肠2412(图24)中)一致。
图35是彩色图,其示出由设备在13次不同的尝试中所检测的反射光的变化水平。这与使用类似于可摄取设备1900的可摄取设备所实施的一组测试相对应。在图35中,在已经检索可摄取设备并且已经从设备提取数据之后,从红色、绿色和蓝色传感器收集的数据被归一化并且事后组合成单一颜色。从检测器所收集的每个数据集被映射成单一的十六进制颜色代码,其表示在每个数据集中的所测量的红色、绿色和蓝色数据的相对大小。在将每个数据集都映射成单一代表色之后,产生图表3400以示出随着设备通过胃肠道运送而在所测量的数据中的差异。图表3400显示了在多个人体尝试中由可摄取设备所采集的数据,其中,p1t3,p1t4,p2t1,p2t2,p2t5,p3t1,p3t3,p3t4示出快速运送,并且p1t1,p1t2,p2t3,p2t4,p3t2示出喂养运送(即,主体已经最近消耗食物)。注意到,设备自身不起到彩色成像设备的功能,并且存在图表3400仅用于说明目的。
在图35中,在图表的顶部处示出较高的样本,并且朝向顶部示出较晚的样本。通常,在幽门过渡的几乎所有情况下观察到红移。胃排空障碍的某些情况指示黄绿色,并且p2t3的未识别的食物示出在样本100至700之间的变化的紫色/蓝色颜色。由于从身体离开而引起的颜色转移从p3t2的样本步骤5400至5500示出,使得检测到大致淡蓝色。所确定的从胃至小肠的幽门过渡(例如,幽门过渡2416(图24))的位置用小圆圈示出,并且通常已经发现,可摄取设备能够可靠地识别出胃肠道的部分。
为了说明的目的,本文给出的示例主要关注于可摄取设备的多个不同的示例性实施例。然而,可以构造的可能的可摄取设备不限于这些实施例,并且总体形状和设计可以在没有明显地改变设备的功能和操作的情况下进行改变。例如,可摄取设备的某些实施例可以以基本朝向设备的中部的取样室连同两套轴向感测分单元一起为特征,每套轴向感测分单元都位于设备的基本相对的端部上。而且,可摄取设备的应用仅仅不限于收集数据、取样和测试胃肠道的部分或递送药剂。例如,在某些实施例中,可摄取设备可以适于包括多个化学、电或光诊断以用于诊断多种疾病。类似地,在可摄取设备上可以包含有用于测量身体现象或其它生理素质的多个不同的传感器。例如,可摄取设备可以适于测量在胃肠道中的某些化学成分或杂质的升高的水平,或被并入到取样室中的定位、取样和适当的诊断和化验技术的组合可以尤其较好地适于确定小肠细菌过度生长(SIBO)的存在。
经由软件实施的本文所述的可摄取设备的各种实施例的元件中的至少某些可以被写入高级程序语言中,例如,面向对象编程、脚本语言或二者。因此,程序代码可以被写入C、C++或任何其它适当的编程语言并且可以包括模块或类,如在面向对象编程领域中的技术人员已知的。或者或另外,经由软件实施的本文所述的可摄取设备的各种实施例的元件中的至少某些可以根据需要被写入汇编语言、机器语言或固件中。在任一种情况中,语言可以是编译或解释语言。
用于实施可摄取设备的程序代码中的至少某些可以被存储在存储介质或计算机可读介质上,所述存储介质或计算机可读介质由通用或专用可编程计算设备读取,所述通用或专用可编程计算设备具有对于本文所述的实施例中的至少一个的功能所必要的处理器、操作系统和相关联的硬件和软件。程序代码当由计算设备所读取时将计算设备配置成以新颖的、特定的且预定义的方式操作,以便执行本文所述的方法中的至少一个。
此外,与本文所述的示例性实施例的系统、设备和方法相关联的程序中的至少某些能够分布在计算机程序产品中,所述计算机程序产品包括计算机可读介质,所述计算机可读介质承载用于一个或多个处理器的计算机可用指令。介质可以以各种形式提供,包括非暂时性的形式,例如,但不限于,一个或多个磁盘、光盘、磁带、芯片和磁性和电子存储器。在某些实施例中,介质可以本质上是暂时的,例如,但不限于,线传输、卫星传输、网络传输(例如,下载)、媒体、数字和模拟信号和类似物。计算机可用指令还可以是各种格式,包括编译的和未编译的代码。
本文已经仅通过示例的方式说明了系统、处理和设备的各种实施例。预料到,在任一个实施例中所述的特征和局限性可以被应用于本文的任何其它实施例,并且与一个实施例有关的流程或示例可以以适当的方式、按照不同的次序进行或并行地进行与任何其它实施例组合。应当注意到,上述的系统和/或方法可以被施加到其它系统和/或方法或根据其它系统和/或方法使用。在不脱离实施例的精神和范围的情况下,对这些示例性实施例可以进行各种修改和变型,所述实施例的精神和范围仅由所附权利要求书限定。所附权利要求书应当给出总体上与本说明书一致的最广泛的解释。
Claims (13)
1.一种可摄取设备,其包括:
外壳;
在所述外壳中的第一光学感测分单元,所述第一光学感测分单元配置成朝向在位于身体的胃肠道内的所述外壳外部的环境以第一波长传输第一照明,并且从所述环境检测由所述第一照明所引起的第一反射率;
在所述外壳中的第二光学感测分单元,所述第二光学感测分单元配置成朝向在所述外壳外部的环境以第二波长传输第二照明,所述第二波长与所述第一波长不同,并且从所述环境检测由所述第二照明所引起的第二反射率;和
位于所述外壳内的处理模块,所述处理模块配置成:
将第一反射率值存储在第一数据集中,其中,所述第一反射率值指示由所述可摄取设备从所述第一反射率检测的光量,以及将第二反射率值存储在第二数据集中,其中,所述第二反射率值指示由所述可摄取设备从所述第二反射率检测的光量;
识别出所述可摄取设备的状态,其中,所述状态是所述可摄取设备的已知的或估算的位置;以及
通过检测是否已经发生状态过渡而确定所述可摄取设备在所述身体的胃肠道内的位置变化,所述状态过渡通过将所述第一数据集与所述第二数据集比较而被检测。
2.根据权利要求1所述的可摄取设备,其中,所述处理模块配置成使得将所述第一数据集与所述第二数据集比较包括对(i)存储在所述第一数据集中的反射率值与存储在所述第二数据集中的反射率值之间的差值和(ii)所述第一数据集的移动平均值与所述第二数据集的移动平均值之间的差值中的至少一个求积分。
3.根据权利要求1所述的可摄取设备,其中,所述处理模块配置成使得:
比较所述第一数据集和所述第二数据集包括从存储在所述第一数据集中的反射率值取得第一平均值;
从存储在所述第二数据集中的反射率值取得第二平均值;以及
取得所述第一平均值与所述第二平均值之间的差值。
4.根据权利要求1所述的可摄取设备,其中,所述处理模块配置成使得比较所述第一数据集和所述第二数据集包括当所述第一数据集的平均值减去所述第一数据集的标准偏差的倍数大于所述第二数据集的平均值加上所述第二数据集的标准偏差的倍数时递增一次计数。
5.根据权利要求1所述的可摄取设备,其中:
所述第一波长处于红色光谱和红外光谱中的至少一个中;
所述第二波长处于蓝色光谱和绿色光谱中的至少一个中;
所识别出的状态是胃;并且
当比较所述第一数据集和所述第二数据集指示所述第一数据集和所述第二数据集已经以统计上显著的方式发散时,已经发生状态过渡,并且所述状态过渡是幽门过渡。
6.根据权利要求1所述的可摄取设备,其中:
所述第一波长处于红色光谱和红外光谱中的至少一个中;
所述第二波长处于蓝色光谱和绿色光谱中的至少一个中;
所识别出的状态是十二指肠;并且
当比较所述第一数据集与所述第二数据集指示所述第一数据集与所述第二数据集之间的差值以统计上显著的方式恒定时,已经发生状态过渡,并且所述状态过渡是屈氏韧带过渡。
7.根据权利要求1所述的可摄取设备,其中:
所述第一波长处于红外光谱中;
所述第二波长处于绿色光谱和蓝色光谱中的至少一个中;
所识别出的状态是空肠;并且
当比较所述第一数据集和所述第二数据集指示所述第一数据集和所述第二数据集已经以统计上显著的方式收敛时,已经发生状态过渡,并且所述状态过渡是回盲肠过渡。
8.根据权利要求1所述的可摄取设备,其中:
所述第一波长处于红色光谱中;
所述第二波长处于绿色光谱和蓝色光谱中的至少一个中;
所识别出的状态是盲肠;并且
当所述比较指示所述第一数据集和所述第二数据集已经以统计上显著的方式收敛时,已经发生状态过渡,并且所述状态过渡是盲肠过渡。
9.根据权利要求1所述的可摄取设备,还包括温度传感器,所述温度传感器配置成测量所述环境的温度变化,其中:所识别出的状态是在身体外部;当所测量的温度变化高于阈值时,已经发生状态过渡,并且所述状态过渡是正进入胃。
10.根据权利要求1所述的可摄取设备,其中,所识别出的状态是回肠;并且
当比较所述第一数据集和所述第二数据集指示所述第一数据集和所述第二数据集已经以统计上显著的方式收敛时,已经发生状态过渡,并且所述状态过渡是回盲肠过渡。
11.根据权利要求10所述的可摄取设备,其中,所述第一波长处于红色光谱中;所述第二波长处于绿色光谱中。
12.一种可摄取设备,其包括:
外壳;
第一光学感测分单元,其配置成朝向在所述外壳外部的环境以第一波长传输第一照明并且从所述环境检测由所述第一照明所引起的第一反射率;
第二光学感测分单元,其配置成朝向在所述外壳外部的环境以第二波长传输第二照明,所述第二波长与所述第一波长不同,并且从所述环境检测由所述第二照明所引起的第二反射率;
位于所述外壳内的处理模块,所述处理模块配置成:
基于比较所述第一反射率和所述第二反射率而确定所述可摄取设备在身体的胃肠道内的位置变化;以及
当通过致动所述外壳的一部分和取样室二者中的至少一个而使所识别出的位置匹配预定的位置时,对所述胃肠道取样。
13.根据权利要求12所述的可摄取设备,其中,通过致动所述外壳的所述一部分和所述取样室二者中的至少一个对所述胃肠道取样包括使所述外壳的所述一部分和所述取样室二者中的至少一个从不允许样本从所述胃肠道进入样本室的取向运动到允许所述样本进入所述样本室的取向。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462055244P | 2014-09-25 | 2014-09-25 | |
| US62/055,244 | 2014-09-25 | ||
| PCT/US2015/052500 WO2016049602A1 (en) | 2014-09-25 | 2015-09-25 | Electromechanical pill device with localization capabilities |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107438404A CN107438404A (zh) | 2017-12-05 |
| CN107438404B true CN107438404B (zh) | 2021-07-20 |
Family
ID=54261135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580063563.8A Active CN107438404B (zh) | 2014-09-25 | 2015-09-25 | 具有定位能力的机电药丸设备 |
Country Status (15)
| Country | Link |
|---|---|
| US (2) | US10835152B2 (zh) |
| EP (2) | EP3799776A1 (zh) |
| JP (3) | JP6648120B2 (zh) |
| KR (1) | KR102397233B1 (zh) |
| CN (1) | CN107438404B (zh) |
| AU (2) | AU2015319850B2 (zh) |
| BR (1) | BR112017006235A2 (zh) |
| CA (1) | CA2964900C (zh) |
| DK (1) | DK3197336T3 (zh) |
| EA (1) | EA201790706A1 (zh) |
| HK (1) | HK1243305A1 (zh) |
| IL (1) | IL251363B (zh) |
| MX (1) | MX2017003919A (zh) |
| SG (2) | SG11201702308TA (zh) |
| WO (1) | WO2016049602A1 (zh) |
Families Citing this family (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160037755A1 (en) * | 2013-03-15 | 2016-02-11 | Dvm Systems, Llc | Automated monitoring of ruminant health and breeding parameters |
| MX2017003919A (es) | 2014-09-25 | 2018-08-09 | Progenity Inc | Dispositivo de pildora electromecanica con capacidades de localizacion. |
| US11810032B2 (en) | 2016-03-16 | 2023-11-07 | Triax Technologies, Inc. | Systems and methods for low-energy wireless applications using networked wearable sensors |
| US11170616B2 (en) | 2016-03-16 | 2021-11-09 | Triax Technologies, Inc. | System and interfaces for managing workplace events |
| US10692024B2 (en) | 2016-03-16 | 2020-06-23 | Triax Technologies, Inc. | Wireless mesh network system for monitoring worksite events including detecting false events |
| US10769562B2 (en) | 2016-03-16 | 2020-09-08 | Triax Technologies, Inc. | Sensor based system and method for authorizing operation of worksite equipment using a locally stored access control list |
| US10500127B2 (en) * | 2016-04-18 | 2019-12-10 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Vivo device and method of using the same |
| US10478373B2 (en) * | 2016-04-18 | 2019-11-19 | Ankon Medical Technologies (Shanghai) Co., Ltd | In vivo device and method of using the same |
| US10314514B2 (en) * | 2016-05-29 | 2019-06-11 | Ankon Medical Technologies (Shanghai) Co., Ltd. | System and method for using a capsule device |
| AU2017312662B2 (en) | 2016-08-18 | 2022-09-08 | Biora Therapeutics, Inc. | Sampling systems and related materials and methods |
| KR102589081B1 (ko) | 2016-09-09 | 2023-10-17 | 비오라 쎄라퓨틱스, 인크. | 분배가능한 물질의 전달을 위한 전자기계식 섭취가능한 디바이스 |
| WO2018106945A1 (en) | 2016-12-07 | 2018-06-14 | Progenity Inc. | Gastrointestinal tract detection methods, devices and systems |
| WO2018111324A1 (en) * | 2016-12-14 | 2018-06-21 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of tlr agonists at the site of gastrointestinal tract disease |
| WO2018111327A1 (en) * | 2016-12-14 | 2018-06-21 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of jak inhibitors at the site of gastrointestinal tract disease |
| BR112019012071A2 (pt) * | 2016-12-14 | 2019-11-12 | Progenity Inc | tratamento de uma doença do trato gastrointestinal com um inibidor de integrina |
| EP3554344A1 (en) | 2016-12-14 | 2019-10-23 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with a tlr modulator |
| WO2018111329A1 (en) * | 2016-12-14 | 2018-06-21 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of il-1 inhibitors at the site of gastrointestinal tract disease |
| WO2018111321A1 (en) * | 2016-12-14 | 2018-06-21 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of il-12/il-23 inhibitors at the site of gastrointestinal tract disease |
| EP3554541B1 (en) * | 2016-12-14 | 2023-06-07 | Biora Therapeutics, Inc. | Treatment of a disease of the gastrointestinal tract with a chemokine/chemokine receptor inhibitor |
| WO2018111328A1 (en) * | 2016-12-14 | 2018-06-21 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of tnf inhibitors at the site of gastrointestinal tract disease |
| BR112019011702A2 (pt) * | 2016-12-14 | 2019-10-22 | Progenity Inc | tratamento de uma doença do trato gastrointestinal com um inibidor de il-12/il-23 liberado usando um dispositivo ingerível |
| CN116869457A (zh) * | 2016-12-14 | 2023-10-13 | 比奥拉治疗股份有限公司 | 使用jak抑制剂治疗胃肠道疾病及装置 |
| AU2017378393B2 (en) * | 2016-12-14 | 2023-03-09 | Biora Therapeutics, Inc. | Treatment of a disease of the gastrointestinal tract with a TNF inhibitor |
| WO2018111323A1 (en) * | 2016-12-14 | 2018-06-21 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of smad7 inhibitors at the site of gastrointestinal tract disease |
| US11523772B2 (en) | 2016-12-14 | 2022-12-13 | Biora Therapeutics, Inc. | Treatment of a disease of the gastrointestinal tract with an immunosuppressant |
| WO2018111322A1 (en) * | 2016-12-14 | 2018-06-21 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of integrin inhibitors at the site of gastrointestinal tract disease |
| EP3554345A1 (en) | 2016-12-14 | 2019-10-23 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with a smad7 inhibitor |
| WO2018183932A1 (en) * | 2017-03-30 | 2018-10-04 | Progenity Inc. | Treatment of a disease of the gastrointestinal tract with a il-13 inhibitor |
| WO2018183931A1 (en) * | 2017-03-30 | 2018-10-04 | Progenity Inc. | Treatment of a disease of the gastrointestinal tract with il-10 or an il-10 agonist |
| EP4108183A1 (en) * | 2017-03-30 | 2022-12-28 | Biora Therapeutics, Inc. | Treatment of a disease of the gastrointestinal tract with an immune modulatory agent released using an ingestible device |
| WO2018182641A1 (en) * | 2017-03-30 | 2018-10-04 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of il-13 inhibitors at the site of gastrointestinal tract disease |
| US20210401895A1 (en) * | 2017-03-30 | 2021-12-30 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with live biotherapeutics |
| WO2018182623A1 (en) * | 2017-03-30 | 2018-10-04 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of chst15 inhibitors at the site of gastrointestinal tract disease |
| WO2018182612A1 (en) * | 2017-03-30 | 2018-10-04 | Progenity Inc. | Methods and ingestible devices for the regio-specific release of stem cells at the site of gastrointestinal tract disease |
| WO2018183934A1 (en) * | 2017-03-30 | 2018-10-04 | Progenity Inc. | Treatment of a disease of the gastrointestinal tract with a chst15 inhibitor |
| EP3900613B1 (en) * | 2017-03-31 | 2023-12-27 | Biora Therapeutics, Inc. | Localization methods for an ingestible device |
| AU2018269547B2 (en) | 2017-05-17 | 2024-01-04 | Massachusetts Institute Of Technology | Self-actuating articles |
| US11541015B2 (en) | 2017-05-17 | 2023-01-03 | Massachusetts Institute Of Technology | Self-righting systems, methods, and related components |
| US20200306516A1 (en) * | 2017-08-14 | 2020-10-01 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with glatiramer or a pharmaceutically acceptable salt thereof |
| CA3073185A1 (en) * | 2017-08-15 | 2019-02-21 | Progenity, Inc. | Treatment of inflammatory disease using ingestible device to release immune modulator |
| WO2019093787A2 (ko) * | 2017-11-08 | 2019-05-16 | 서울바이오시스주식회사 | 의료용 캡슐 장치 |
| US20210228157A1 (en) * | 2017-12-06 | 2021-07-29 | James Phillip Jones | Sampling capsule system and methods |
| CA3085330A1 (en) * | 2017-12-14 | 2019-06-20 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with a s1p modulator |
| US20210031012A1 (en) * | 2018-01-26 | 2021-02-04 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with a pde4 inhibitor |
| EP3773407A4 (en) * | 2018-03-30 | 2021-12-29 | Vibrant Ltd. | Gastrointestinal treatment system including a vibrating capsule, and method of use thereof |
| WO2019222570A1 (en) | 2018-05-17 | 2019-11-21 | Massachusetts Institute Of Technology | Systems for electrical stimulation |
| WO2019246312A1 (en) * | 2018-06-20 | 2019-12-26 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with an immunomodulator |
| US20210363233A1 (en) * | 2018-06-20 | 2021-11-25 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with an il-12/il-23 inhibitor |
| EP3810085A1 (en) * | 2018-06-20 | 2021-04-28 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with an integrin inhibitor |
| WO2019246317A1 (en) | 2018-06-20 | 2019-12-26 | Progenity, Inc. | Treatment of a disease or condition in a tissue originating from the endoderm |
| EP3810095A1 (en) * | 2018-06-20 | 2021-04-28 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with a tnf inhibitor |
| US20220257600A1 (en) * | 2018-06-20 | 2022-08-18 | Progenity, Inc. | Treatment of a disease of the gastrointestinal tract with a jak or other kinase inhibitor |
| US20230023414A1 (en) | 2018-11-19 | 2023-01-26 | Progenity, Inc. | Methods and devices for treating a disease with biotherapeutics |
| DK3659433T3 (da) * | 2018-11-30 | 2021-04-19 | Phytobiotics Futterzusatzstoffe Gmbh | System til analyse af billeder af dyrs afføring |
| CN113272001B (zh) * | 2019-01-03 | 2024-04-05 | 维布兰特公司 | 用于将可摄入药物递送至使用者的胃肠道中的装置和方法 |
| US11771829B2 (en) | 2019-02-01 | 2023-10-03 | Massachusetts Institute Of Technology | Systems and methods for liquid injection |
| GB201901470D0 (en) * | 2019-02-04 | 2019-03-27 | Vibrant Ltd | Vibrating capsule for gastrointestinal treatment, and method of use thereof |
| WO2020257017A1 (en) | 2019-06-18 | 2020-12-24 | Progenity, Inc. | Ingestible device with component capable of residing in the gastrointestinal tract |
| CA3144331A1 (en) * | 2019-06-28 | 2020-12-30 | Endiatx, Inc. | Ingestible device with propulsion and imaging capabilities |
| WO2021070170A1 (en) * | 2019-10-10 | 2021-04-15 | Check-Cap Ltd. | Fail safe radiation concealment mechanism |
| US11541216B2 (en) | 2019-11-21 | 2023-01-03 | Massachusetts Institute Of Technology | Methods for manufacturing tissue interfacing components |
| WO2021119482A1 (en) | 2019-12-13 | 2021-06-17 | Progenity, Inc. | Ingestible device for delivery of therapeutic agent to the gastrointestinal tract |
| US11152664B2 (en) * | 2019-12-24 | 2021-10-19 | Anexa Labs Llc | Compact electronics with optical sensors |
| US11156965B1 (en) | 2020-10-23 | 2021-10-26 | Anexa Labs Llc | Latching mechanism for securing two objects |
| WO2023178042A2 (en) * | 2022-03-14 | 2023-09-21 | Massachusetts Institute Of Technology | Ingestible capsules |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1819795A (zh) * | 2004-03-25 | 2006-08-16 | 奥林巴斯株式会社 | 体内信息获取装置和体内信息获取装置系统 |
| JP2008109954A (ja) * | 2006-10-27 | 2008-05-15 | Matsushita Electric Works Ltd | カプセル型撮像装置 |
| WO2009104110A1 (en) * | 2008-02-18 | 2009-08-27 | Koninklijke Philips Electronics N.V. | Administration of drugs to a patient |
| CN102186401A (zh) * | 2008-10-17 | 2011-09-14 | 奥林巴斯株式会社 | 图像生成装置、内窥镜系统以及图像生成方法 |
| WO2012066553A1 (en) * | 2010-11-16 | 2012-05-24 | Given Imaging Ltd. | In-vivo imaging device and method for performing spectral analysis |
| CN103356152A (zh) * | 2013-07-15 | 2013-10-23 | 中国人民解放军第二军医大学 | 含便携式定位装置的胶囊内窥镜系统 |
Family Cites Families (116)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1058860A (en) | 1912-05-01 | 1913-04-15 | George Hames | Warp stop-motion for looms. |
| CH337989A (fr) | 1957-04-09 | 1959-04-30 | Perrenoud Jean Pierre Dr | Capsule |
| US3057344A (en) | 1957-05-21 | 1962-10-09 | Abella Carlos Alberto | Capsule for the study of the digestive tract and method of using the same |
| US3315660A (en) | 1963-08-08 | 1967-04-25 | Carlos A Abella | Capsule for insertion in the digestive track |
| US3485235A (en) | 1967-12-04 | 1969-12-23 | Ronald Felson | Capsule for the study and treatment of the digestive tract |
| US4239040A (en) | 1976-10-19 | 1980-12-16 | Kabushiki Kaisha Daini Seikosha | Capsule for medical use |
| US4281645A (en) | 1977-06-28 | 1981-08-04 | Duke University, Inc. | Method and apparatus for monitoring metabolism in body organs |
| JPS5588732A (en) | 1978-12-26 | 1980-07-04 | Olympus Optical Co | Endoscope |
| DE2928477C3 (de) | 1979-07-14 | 1982-04-15 | Battelle-Institut E.V., 6000 Frankfurt | Vorrichtung zur Freisetzung von Substanzen an definierten Orten des Verdauungstraktes |
| JPS57163309A (en) | 1981-04-01 | 1982-10-07 | Olympus Optical Co Ltd | Capsule apparatus for medical use |
| GB2129557A (en) | 1982-11-03 | 1984-05-16 | Gec Xpelair Ltd | Actuator |
| US4573447A (en) | 1985-02-19 | 1986-03-04 | Sunbelt America Corporation | Chemical heater |
| US4844076A (en) | 1988-08-26 | 1989-07-04 | The Johns Hopkins University | Ingestible size continuously transmitting temperature monitoring pill |
| US5170801A (en) | 1990-10-02 | 1992-12-15 | Glaxo Inc. | Medical capsule device actuated by radio-frequency (rf) signal |
| US5279607A (en) | 1991-05-30 | 1994-01-18 | The State University Of New York | Telemetry capsule and process |
| US5395366A (en) | 1991-05-30 | 1995-03-07 | The State University Of New York | Sampling capsule and process |
| IL108352A (en) | 1994-01-17 | 2000-02-29 | Given Imaging Ltd | In vivo video camera system |
| DE19532676C1 (de) | 1995-09-05 | 1997-05-07 | Inst Physikalische Hochtech Ev | Anordnung zur Bestimmung der Position eines Markers in einem Hohlraum innerhalb des Organismus eines Lebewesens |
| ZA9610374B (en) | 1995-12-11 | 1997-06-23 | Elan Med Tech | Cartridge-based drug delivery device |
| US5951538A (en) | 1997-08-07 | 1999-09-14 | Ceramatec, Inc. | Gas generating device for delivering beneficial agents to a body cavity |
| IL122602A0 (en) | 1997-12-15 | 1998-08-16 | Tally Eitan Zeev Pearl And Co | Energy management of a video capsule |
| US5984860A (en) | 1998-03-25 | 1999-11-16 | Shan; Yansong | Pass-through duodenal enteroscopic device |
| US8636648B2 (en) * | 1999-03-01 | 2014-01-28 | West View Research, Llc | Endoscopic smart probe |
| US6576429B1 (en) | 1999-10-26 | 2003-06-10 | Alimenta Diagnostics Ab | Apparatus for intestinal sampling and use thereof |
| US6344027B1 (en) | 1999-12-08 | 2002-02-05 | Scimed Life Systems, Inc. | Needle-less injection apparatus and method |
| GB9930000D0 (en) | 1999-12-21 | 2000-02-09 | Phaeton Research Ltd | An ingestible device |
| GB9930001D0 (en) | 1999-12-21 | 2000-02-09 | Phaeton Research Ltd | An ingestible device |
| IL134017A (en) * | 2000-01-13 | 2008-04-13 | Capsule View Inc | Camera for photography inside the intestines |
| EP1779777B1 (en) | 2000-03-08 | 2011-06-08 | Given Imaging Ltd. | A device for in vivo imaging |
| US20020099310A1 (en) | 2001-01-22 | 2002-07-25 | V-Target Ltd. | Gastrointestinal-tract sensor |
| US7553276B2 (en) | 2001-01-16 | 2009-06-30 | Given Imaging Ltd. | Method and device for imaging body lumens |
| IL157007A0 (en) | 2001-01-22 | 2004-02-08 | Target Technologies Ltd V | Ingestible device |
| CN101305906B (zh) | 2001-03-14 | 2012-02-08 | 吉温成象有限公司 | 检测活体内色度异常的系统 |
| EP1243524A3 (en) | 2001-03-16 | 2004-04-07 | Pfizer Products Inc. | Pharmaceutical kit for oxygen-sensitive drugs |
| US7160258B2 (en) * | 2001-06-26 | 2007-01-09 | Entrack, Inc. | Capsule and method for treating or diagnosing the intestinal tract |
| GB0118266D0 (en) | 2001-07-26 | 2001-09-19 | Powderject Res Ltd | Silencing device and method for needleless syringe |
| US7615234B2 (en) | 2001-09-11 | 2009-11-10 | Glide Pharmaceutical Technologies Limited | Drug delivery technology |
| CA2373854A1 (en) | 2002-02-28 | 2003-08-28 | Alain Moreau | Methods of diagnosing and counteracting adolescent idiopathic scoliosis |
| US7797033B2 (en) | 2002-04-08 | 2010-09-14 | Smart Pill Corporation | Method of using, and determining location of, an ingestible capsule |
| US20040254455A1 (en) | 2002-05-15 | 2004-12-16 | Iddan Gavriel J. | Magneic switch for use in a system that includes an in-vivo device, and method of use thereof |
| WO2004066903A2 (en) | 2003-01-29 | 2004-08-12 | E-Pill Pharma Ltd. | Active drug delivery in the gastrointestinal tract |
| US7611480B2 (en) | 2003-04-24 | 2009-11-03 | Levy Mark M | Gastrointestinal bioreactor |
| US7056673B2 (en) | 2003-04-25 | 2006-06-06 | Janssen Pharmaceutica N.V. | Preservation of RNA in a biological sample |
| EP1643906A2 (en) | 2003-06-12 | 2006-04-12 | University of Utah Research Foundation | Apparatus, systems and methods for diagnosing carpal tunnel syndrome |
| US20050065441A1 (en) * | 2003-08-29 | 2005-03-24 | Arkady Glukhovsky | System, apparatus and method for measurement of motion parameters of an in-vivo device |
| JP4445732B2 (ja) | 2003-08-29 | 2010-04-07 | オリンパス株式会社 | 被検体内導入装置および無線型被検体内情報取得システム |
| JP2005074031A (ja) * | 2003-09-01 | 2005-03-24 | Pentax Corp | カプセル内視鏡 |
| JP4733918B2 (ja) | 2003-10-01 | 2011-07-27 | オリンパス株式会社 | カプセル投薬システム |
| EP1530950A1 (en) | 2003-11-12 | 2005-05-18 | Färgklämman AB | Sampling device and method of producing thereof |
| WO2005062716A2 (en) | 2003-12-31 | 2005-07-14 | Given Imaging Ltd. | Apparatus, system and method to indicate in-vivo device location |
| US8206285B2 (en) * | 2003-12-31 | 2012-06-26 | Given Imaging Ltd. | Apparatus, system and method to indicate in-vivo device location |
| WO2005112895A2 (en) | 2004-05-20 | 2005-12-01 | Spectrum Dynamics Llc | Ingestible device platform for the colon |
| WO2005113374A2 (en) * | 2004-05-21 | 2005-12-01 | Given Imaging Ltd. | Device, system and method for in-vivo sampling |
| US7938775B2 (en) | 2004-06-28 | 2011-05-10 | Given Imaging, Ltd. | Device, system, and method for in-vivo analysis |
| JP2008532568A (ja) * | 2005-01-18 | 2008-08-21 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 電子制御されるカプセル |
| CN101208039A (zh) | 2005-01-18 | 2008-06-25 | 皇家飞利浦电子股份有限公司 | 用于对消化道中的流体采样的可摄入电控胶囊 |
| US8852083B2 (en) | 2005-02-04 | 2014-10-07 | Uti Limited Partnership | Self-stabilized encapsulated imaging system |
| US20070043320A1 (en) | 2005-02-09 | 2007-02-22 | Kenany Saad A | Microstream injector |
| US20070027362A1 (en) * | 2005-07-27 | 2007-02-01 | Olympus Medical Systems Corp. | Infrared observation system |
| CN101282677B (zh) | 2005-10-05 | 2010-07-28 | 奥林巴斯医疗株式会社 | 胶囊式医疗装置、其引导系统和引导方法、及被检体内插入装置 |
| US20070092401A1 (en) | 2005-10-26 | 2007-04-26 | Feier Liao | Devices and methods for sample collection and analysis |
| US20070161928A1 (en) | 2005-11-22 | 2007-07-12 | Stichting Technologisch Top-Instituut Voedselwetenschappen | Sampling device for in vivo sampling of liquids from the gastrointestinal tract, process for the production thereof and mould or mask for use in the production process |
| EP1965698B1 (en) | 2005-12-29 | 2014-02-19 | Given Imaging Ltd. | System and method of in-vivo magnetic position determination |
| IL182332A (en) | 2006-03-31 | 2013-04-30 | Given Imaging Ltd | A system and method for assessing a patient's condition |
| DE602007000529D1 (de) | 2006-06-15 | 2009-03-26 | Ela Medical Sa | Aktives medizinisches Implantat, insbesondere Vorrichtung zur Stimulation, Resynchronisation, Defibrillation und/oder Kardioversion, die Mittel zur prädiktiven Warnung über eine Verschlimmerung des Krankheitszustands des Patienten umfasst |
| KR100846565B1 (ko) * | 2006-10-13 | 2008-07-15 | 경북대학교 산학협력단 | 영상 전송속도가 캡슐 이동속도에 연동되는 내시경 캡슐 및그 제어방법 |
| KR100853516B1 (ko) * | 2006-11-15 | 2008-08-21 | 충북대학교 산학협력단 | 캡슐 내시경의 내장 모델링 및 자세 측정 방법 및 이방법을 수행하기 위한 시스템 |
| US9730573B2 (en) * | 2007-03-20 | 2017-08-15 | Given Imaging Ltd. | Narrow band in-vivo imaging device |
| JP4932588B2 (ja) | 2007-05-08 | 2012-05-16 | オリンパス株式会社 | 画像処理装置および画像処理プログラム |
| US20100285475A1 (en) | 2007-10-22 | 2010-11-11 | Agency For Science, Technology And Research | Fused genes |
| EP2057934B1 (en) | 2007-11-12 | 2017-01-04 | Novineon Healthcare Technology Partners Gmbh | Device for hemorrhage detection |
| EP2259714B1 (en) | 2008-02-22 | 2019-09-11 | NanoMed Diagnostics B.V. | Device for detecting a medical condition or disease |
| US20100111763A1 (en) | 2008-03-18 | 2010-05-06 | Kahn Laurence H | Examination Device for Blood Detection |
| US8423122B2 (en) | 2008-07-10 | 2013-04-16 | Given Imaging Ltd. | Localization of capsule with a synthetic source of quadrupoles and dipoles |
| BRPI1005285A2 (pt) | 2009-01-29 | 2020-09-01 | Given Imaging Ltda | dispositivo, sistema e método de detecção de sangramento |
| DE102009009165B4 (de) | 2009-02-16 | 2018-12-27 | Siemens Healthcare Gmbh | Verfahren und Vorrichtung zur Bestimmung eines von einer Endoskopiekapsel in einem Patienten zurückgelegten Weges |
| CN102333887B (zh) | 2009-02-25 | 2014-04-02 | 戴格努生命科学公司 | 用于检测gi癌转移的方法 |
| US8696602B2 (en) * | 2009-03-31 | 2014-04-15 | Given Imaging, Inc. | Method of determining body exit of an ingested capsule |
| KR100931946B1 (ko) | 2009-06-10 | 2009-12-15 | 주식회사 인트로메딕 | 캡슐 내시경에 의해 촬영된 이미지 데이터를 저장하고 있는 서버로부터 관심있는 데이터를 우선하여 단말기에 수신하여 확인할 수 있도록 하는 서버-클라이언트 시스템의 이미지 데이터 전송 프로세싱 방법 |
| WO2010146588A2 (en) | 2009-06-16 | 2010-12-23 | Technion- Research And Development Foundation Ltd. | Miniature disease diagnostic system |
| EP2461746A1 (en) * | 2009-08-05 | 2012-06-13 | Tel HaShomer Medical Research Infrastructure and Services Ltd. | Methods and devices for providing information useful in the diagnosis of abnormalities of the gastrointestinal tract |
| US20130018279A1 (en) | 2009-09-01 | 2013-01-17 | Pathway Genomics | "blood sample collection apparatus and kits" |
| KR20110034265A (ko) * | 2009-09-28 | 2011-04-05 | 엘지전자 주식회사 | 생체 검사 기능을 갖는 캡슐 내시경 및 그 제어방법 |
| US20130022983A1 (en) | 2009-10-26 | 2013-01-24 | Externautics S.P.A. | Colon and Rectal Tumor Markers and Methods of Use Thereof |
| US9026192B2 (en) | 2009-11-24 | 2015-05-05 | Given Imaging Ltd | Device and method for in vivo imaging |
| US20130013031A1 (en) * | 2010-03-17 | 2013-01-10 | Photopill Medical Ltd. | Capsule phototherapy |
| CN103209634B (zh) | 2011-04-01 | 2016-02-03 | 奥林巴斯株式会社 | 接收装置和胶囊型内窥镜系统 |
| US8586384B2 (en) | 2011-04-05 | 2013-11-19 | Olympus Corporation | Method of collecting duodenal specimen to detect upper digestive system disease without using pancreatic or bile stimulant |
| CN103827668B (zh) | 2011-08-04 | 2016-04-20 | 基文影像公司 | 用于体内免疫测定的装置、系统和方法 |
| CN104081202A (zh) | 2011-09-12 | 2014-10-01 | 克里蒂科斯有限责任公司 | 检测靶分子的非侵入性方法 |
| US8801630B2 (en) | 2011-09-30 | 2014-08-12 | Olympus Medical Systems Corp. | Method of taking out liquid present inside subject therefrom |
| US9795330B2 (en) | 2011-12-15 | 2017-10-24 | Given Imaging Ltd. | Device, system and method for in-vivo detection of bleeding in the gastrointestinal tract |
| CN104271028B (zh) | 2011-12-15 | 2017-11-17 | 基文影像公司 | 确定患者的胃肠道随时间的出血曲线的类型的系统 |
| WO2013120184A1 (en) | 2012-02-17 | 2013-08-22 | Micropharma Limited | Ingestible medical device |
| WO2014028902A1 (en) | 2012-08-16 | 2014-02-20 | Rock West Solutions, Inc. | System and methods for locating a radiofrequency transceiver in the human body |
| DE102012025143A1 (de) | 2012-11-07 | 2014-05-08 | Heraeus Medical Gmbh | Verfahren zur Wirkstofffreisetzung und Wirkstofffreisetzungssysteme |
| CA2906783A1 (en) | 2013-03-14 | 2014-09-25 | Spot On Sciences, Inc. | Biological sample collection and preservation |
| GB201304738D0 (en) | 2013-03-15 | 2013-05-01 | Mars Inc | Sampling Device |
| US9655501B2 (en) | 2013-06-25 | 2017-05-23 | Digital Direct Ir, Inc. | Side-scan infrared imaging devices |
| US9324145B1 (en) | 2013-08-08 | 2016-04-26 | Given Imaging Ltd. | System and method for detection of transitions in an image stream of the gastrointestinal tract |
| WO2015059569A1 (en) | 2013-09-26 | 2015-04-30 | Medimetrics Personalized Drug Delivery, B.V. | Delivery capsule with threshold release |
| CN105848557B (zh) | 2013-12-27 | 2018-09-28 | 王康怀 | 具有多光谱光源的胶囊摄影机装置 |
| JP6496303B2 (ja) | 2014-03-28 | 2019-04-03 | テルモ株式会社 | 包装されたプレフィルドシリンジ |
| US20160066855A1 (en) | 2014-09-05 | 2016-03-10 | Elwha LLC, a limited liability company of the State of Delaware | Systems, methods, and devices addressing the gastro-intestinal tract |
| MX2017003919A (es) | 2014-09-25 | 2018-08-09 | Progenity Inc | Dispositivo de pildora electromecanica con capacidades de localizacion. |
| WO2016054015A1 (en) | 2014-09-30 | 2016-04-07 | The Regents Of The University Of California | Active agent delivery devices and methods of using the same |
| CN105877685B (zh) | 2015-01-26 | 2019-03-15 | 香港中文大学 | 内窥镜胶囊和内窥镜系统 |
| EP3302266B1 (en) | 2015-06-02 | 2024-03-20 | Given Imaging Ltd. | Devices, systems and methods for in-vivo immunoassay |
| EP3108810A1 (en) | 2015-06-23 | 2016-12-28 | Valtronic Technologies (Holding) SA | Ingestible device for measuring glucose concentration |
| JP2017012395A (ja) | 2015-06-30 | 2017-01-19 | 富士フイルム株式会社 | 内視鏡システム及び内視鏡システムの作動方法 |
| US20180193621A1 (en) | 2015-06-30 | 2018-07-12 | Entrega Inc. | Device for oral delivery of active agents |
| US10610351B2 (en) | 2016-03-08 | 2020-04-07 | Picocyl | Gas canisters and methods for making them |
| AU2017312662B2 (en) | 2016-08-18 | 2022-09-08 | Biora Therapeutics, Inc. | Sampling systems and related materials and methods |
| KR102589081B1 (ko) | 2016-09-09 | 2023-10-17 | 비오라 쎄라퓨틱스, 인크. | 분배가능한 물질의 전달을 위한 전자기계식 섭취가능한 디바이스 |
| CN109715076B (zh) | 2016-09-15 | 2022-03-08 | 宝珍那提公司 | 流体取样装置 |
| EP3900613B1 (en) | 2017-03-31 | 2023-12-27 | Biora Therapeutics, Inc. | Localization methods for an ingestible device |
-
2015
- 2015-09-25 MX MX2017003919A patent/MX2017003919A/es unknown
- 2015-09-25 US US15/514,413 patent/US10835152B2/en active Active
- 2015-09-25 EA EA201790706A patent/EA201790706A1/ru unknown
- 2015-09-25 JP JP2017516962A patent/JP6648120B2/ja active Active
- 2015-09-25 DK DK15775911.9T patent/DK3197336T3/da active
- 2015-09-25 SG SG11201702308TA patent/SG11201702308TA/en unknown
- 2015-09-25 EP EP20207295.5A patent/EP3799776A1/en active Pending
- 2015-09-25 CA CA2964900A patent/CA2964900C/en active Active
- 2015-09-25 KR KR1020177011055A patent/KR102397233B1/ko active IP Right Grant
- 2015-09-25 EP EP15775911.9A patent/EP3197336B1/en active Active
- 2015-09-25 WO PCT/US2015/052500 patent/WO2016049602A1/en active Application Filing
- 2015-09-25 CN CN201580063563.8A patent/CN107438404B/zh active Active
- 2015-09-25 SG SG10201902347RA patent/SG10201902347RA/en unknown
- 2015-09-25 AU AU2015319850A patent/AU2015319850B2/en active Active
- 2015-09-25 BR BR112017006235A patent/BR112017006235A2/pt not_active Application Discontinuation
-
2017
- 2017-03-23 IL IL251363A patent/IL251363B/en unknown
-
2018
- 2018-02-28 HK HK18102924.7A patent/HK1243305A1/zh unknown
-
2019
- 2019-10-07 JP JP2019184384A patent/JP6820991B2/ja active Active
- 2019-12-20 AU AU2019284013A patent/AU2019284013A1/en not_active Abandoned
-
2020
- 2020-01-31 JP JP2020014958A patent/JP2020096867A/ja active Pending
- 2020-09-24 US US17/030,533 patent/US20210015398A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1819795A (zh) * | 2004-03-25 | 2006-08-16 | 奥林巴斯株式会社 | 体内信息获取装置和体内信息获取装置系统 |
| JP2008109954A (ja) * | 2006-10-27 | 2008-05-15 | Matsushita Electric Works Ltd | カプセル型撮像装置 |
| WO2009104110A1 (en) * | 2008-02-18 | 2009-08-27 | Koninklijke Philips Electronics N.V. | Administration of drugs to a patient |
| CN101945613A (zh) * | 2008-02-18 | 2011-01-12 | 皇家飞利浦电子股份有限公司 | 为患者用药 |
| CN102186401A (zh) * | 2008-10-17 | 2011-09-14 | 奥林巴斯株式会社 | 图像生成装置、内窥镜系统以及图像生成方法 |
| WO2012066553A1 (en) * | 2010-11-16 | 2012-05-24 | Given Imaging Ltd. | In-vivo imaging device and method for performing spectral analysis |
| CN103356152A (zh) * | 2013-07-15 | 2013-10-23 | 中国人民解放军第二军医大学 | 含便携式定位装置的胶囊内窥镜系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| IL251363B (en) | 2021-07-29 |
| HK1243305A1 (zh) | 2018-07-13 |
| CA2964900A1 (en) | 2016-03-31 |
| JP6820991B2 (ja) | 2021-01-27 |
| EP3197336A1 (en) | 2017-08-02 |
| JP2020096867A (ja) | 2020-06-25 |
| KR102397233B1 (ko) | 2022-05-12 |
| SG11201702308TA (en) | 2017-04-27 |
| AU2015319850A1 (en) | 2017-04-13 |
| DK3197336T3 (da) | 2021-01-18 |
| US20210015398A1 (en) | 2021-01-21 |
| JP2017532125A (ja) | 2017-11-02 |
| BR112017006235A2 (pt) | 2017-12-12 |
| JP6648120B2 (ja) | 2020-02-14 |
| EP3197336B1 (en) | 2020-12-23 |
| EP3799776A1 (en) | 2021-04-07 |
| MX2017003919A (es) | 2018-08-09 |
| WO2016049602A1 (en) | 2016-03-31 |
| IL251363A0 (en) | 2017-05-29 |
| SG10201902347RA (en) | 2019-04-29 |
| US20170296092A1 (en) | 2017-10-19 |
| JP2020014890A (ja) | 2020-01-30 |
| CA2964900C (en) | 2023-02-21 |
| CN107438404A (zh) | 2017-12-05 |
| AU2019284013A1 (en) | 2020-01-23 |
| US10835152B2 (en) | 2020-11-17 |
| KR20170084031A (ko) | 2017-07-19 |
| AU2015319850B2 (en) | 2019-09-26 |
| EA201790706A1 (ru) | 2017-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107438404B (zh) | 具有定位能力的机电药丸设备 | |
| US20190083073A1 (en) | Ingestible Medical Device | |
| JP4709836B2 (ja) | 自律型体内デバイス | |
| CA3084006A1 (en) | Sensor monitoring system for in-dwelling catheter based treatments | |
| US20130237774A1 (en) | Device and Method for Continuous Chemical Sensing | |
| US20100130837A1 (en) | Modular ingestible capsule | |
| JP2017534324A (ja) | 装置 | |
| JP2009504322A (ja) | 輸液ポンプのためのハンドヘルド制御装置デバイス | |
| CN106413781A (zh) | 由药物输送设备操作的记录设备 | |
| CN108348197A (zh) | 用于确定分析物浓度的套件 | |
| JP2009504323A (ja) | 輸液ポンプのための制御装置デバイス | |
| JP2017534323A (ja) | 装置 | |
| ES2793350T3 (es) | Depósito de medición de fluidos para extractores de leche | |
| US20110152639A1 (en) | Tethering capsule system | |
| CN101352343A (zh) | 消化道智能释药胶囊系统及方法 | |
| CN112834499A (zh) | 尿液分析装置及方法、马桶 | |
| JP2017533003A (ja) | 装置 | |
| JP7427111B2 (ja) | 薬剤送達装置に取り付けられた補助装置の起動および検出システム | |
| CN205698555U (zh) | 一种辅助提高患者口服药物依从性的小型贮药装置 | |
| US20170261462A1 (en) | Sensor detection pads with integrated fuse | |
| CN114554973A (zh) | 取样装置 | |
| AG | Medical Assistive Robot (MAR) | |
| Amoako-Tuffour | Design of an automated ingestible gastrointestinal sampling device | |
| CN109932404A (zh) | 一种在线体液检测装置和婴儿口腔分泌物在线检测装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 1243305 Country of ref document: HK |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address |
Address after: California, USA Patentee after: Biola Therapeutics Inc. Address before: California, USA Patentee before: PROGENITY Inc. |
|
| CP03 | Change of name, title or address |