CN103499927A - 一种直流伺服电机位置控制系统 - Google Patents
一种直流伺服电机位置控制系统 Download PDFInfo
- Publication number
- CN103499927A CN103499927A CN201310438001.XA CN201310438001A CN103499927A CN 103499927 A CN103499927 A CN 103499927A CN 201310438001 A CN201310438001 A CN 201310438001A CN 103499927 A CN103499927 A CN 103499927A
- Authority
- CN
- China
- Prior art keywords
- servo motor
- ball
- screw
- control system
- position control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Control Of Position Or Direction (AREA)
- Control Of Direct Current Motors (AREA)
Abstract
本发明提供了一种直流伺服电机的位置控制系统,包括控制装置、驱动装置、检测装置及执行装置;该系统由位移传感器实时检测滚珠丝杠螺母的位置,并将其反馈给PC机,PC机通过比较滚珠丝杠螺母的给定位移与实际位移之间的差值,根据一定的控制算法,向直流伺服电机驱动器输入一定的信号,直流伺服电机驱动器根据这个信号,通过改变直流伺服电机电枢的输入电压来控制直流伺服电机的转速,从而可双向改变滚珠丝杠螺母的线位移;该位置控制系统还可以实现转速闭环控制。通过本发明能够实现精确的位置控制和限位功能,适用于多种实际应用。
Description
技术领域
本发明涉及自动控制技术领域,更具体地,涉及一种直流伺服电机位置控制系统。
背景技术
随着科学技术和工业生产的发展,对机械产品不时提出新要求,除了优质、高效、低能耗、低廉价格之外,突出的需求是实现性能优越的、适应高精度要求的机械功能,而高精度的机械系统离不开自动化的位置控制机构。
位置控制系统是自动控制系统中的一类,随着微电子技术和计算机技术的飞速发展,它几乎应用到了社会生活中的各个领域,极大地促进了生产力的发展。整个控制系统功能的实现不仅包括控制算法的实现,而且包括执行机构的设计。执行机构的选用和设计,就是为了实现特定的机械功能,它是实现整个控制系统功能的最基本环节,对整个控制系统功能的实现起着至关重要的作用。执行机构设计的好坏,直接影响整个系统的性能、效率和成本。
伺服电机分为直流伺服电机和交流伺服电机两种,在位置控制系统中,由于直流伺服电机具有优良的调速性能,能在大范围内平滑调速、起动、制动和正反转,并且易于各种控制规律的实现。因而直流伺服电机位置控制系统应用较为广泛。
但是,现有的直流伺服电机位置控制系统主要集中于对电机本身的位置控制;但在实际应用当中,位置控制还应该包括对在直流伺服电机驱动下的执行机构的位置精确控制。另一方面,现有的位置控制系统往往只能实现线位移的位置检测和控制,不能实现角位移条件下的检测和控制,使现有位置控制系统的功能和应用存在较大的局限性。
发明内容
针对现有技术中的上述缺陷,本发明提供了一种直流伺服电机的位置控制系统。该系统实现了对直流伺服电机执行机构的位置和转速的双闭环控制,构成了一个具有双重功能的闭环控制系统,能够实现精确的位置控制和限位功能,适用于多种实际应用。
本发明所述直流伺服电机的位置控制系统,其特征在于,包括控制装置、驱动装置、检测装置及执行装置;所述控制装置包括PC机,用于根据预定控制算法向驱动装置输出控制信号;所述驱动装置包括直流伺服电机驱动器,用于根据所述控制信号改变执行装置中的直流伺服电机的输入电压,从而控制直流伺服电机的转速;所述执行装置包括直流伺服电机、减速器、联轴器、滚珠丝杠和滚珠丝杠螺母,直流伺服电机通过减速器及联轴器连接滚珠丝杠,滚珠丝杠与滚珠丝杠螺母相匹配,并且滚珠丝杠螺母与运动部件联接;其中直流伺服电机在所述直流伺服电机驱动器提供的所述输入电压下转动,使所述滚珠丝杠转动,从而带动滚珠丝杠螺母及运动部件移动;所述检测装置包括位移传感器及信号转换接口电路,所述位移传感器实时检测执行装置的滚珠丝杠螺母的位移量,并通过信号转换接口电路将所述位移量转换为数字信号输入所述PC机;其中,所述PC机根据所述位移量与预定位移量之差值按照所述预定控制算法输出所述控制信号,直至所述滚珠丝杠螺母达到预定位移量。
优选的是,所述检测装置还包括分别设置在运动部件行程的起点和终点位置上的第一限位开关和第二限位开关,当所述运动部件达到其行程起点和终点的极限位置时,所述第一限位开关和第二限位开关由常开状态转为闭合;所述直流伺服电机驱动器检测所述第一限位开关和第二限位开关的状态,并且在当第一限位开关和第二限位开关闭合后向直流伺服电机输出0V电压,从而使所述直流伺服电机停止转动。
优选的是,所述位置控制系统还包括转速闭环控制装置,所述转速闭环控制装置包括转速传感器,用于实时检测直流伺服电机的转速,并将转速值反馈至所述PC机;所述PC机通过所述直流伺服电机驱动器控制直流伺服电机的转速,直至其达到预定转速。
进一步优选的是,所述转速传感器采用磁电式转速传感器、霍尔式转速传感器或光电式转速传感器中的任意一种。
优选的是,所述执行装置还包括圆柱形附加导轨,用于约束所述滚珠丝杠螺母的旋转运动从而使其保持直线移动;并且圆柱形附加导轨上设置与其相配合并联接所述滚珠丝杠螺母的直线滚动轴承。
优选的是,所述滚珠丝杠的两端各以一个角接触球轴承双向固定支撑。
进一步优选的是,所述滚珠丝杠的两端分别固定在丝杠支撑架上,并且丝杠支撑架的外侧设置端盖,在所述丝杠支撑架和端盖之间设置弹性调整垫片,所述弹性调整垫片用于改变端盖与丝杠支撑架之间的距离来调整所述角接触球轴承的游隙。
优选的是,所述执行装置的联轴器包括齿盘和套筒两部分;所述齿盘与直流伺服电机的电机轴固定联接在一起,所述套筒联接齿盘与滚珠丝杠的丝杠轴,同时套筒可以在丝杠轴上轴向移动,以便在构成转速闭环控制时使滚珠丝杠与齿盘脱离。
进一步优选的是,所述套筒包括键槽和销孔,并且套筒与滚珠丝杠通过所述键槽实现键联接,且套筒与齿盘之间通过所述销孔进行销联接。
优选的是,所述执行装置还包括底板,在底板上固定电机支撑架、丝杠支撑架、位移传感器;所述底板的底面设置支撑脚;并且所述电机支撑架、丝杠支撑架与底板之间通过定位销固定。
可见,通过本发明,可以对直流伺服电机执行机构的位置和转速实现双闭环控制,构成了一个具有双重功能的闭环控制系统,能够实现精确的位置控制和限位功能,适用于多种实际应用。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细的说明:
图1是本发明实施例的位置控制系统整体结构示意图;
图2是本发明实施例的执行装置装配结构示意图;
图3A-3B是本发明实施例的端盖结构示意图;
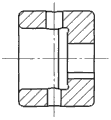
图4A-4B是本发明实施例的套筒结构示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明的技术方案,并使本发明的上述目的、特征和优点能够更加明显易懂,下面结合实施例及实施例附图对本发明作进一步详细的说明。
图1是本发明实施例的位置控制系统整体结构示意图。本发明所述直流伺服电机的位置控制系统包括控制装置、驱动装置、检测装置及执行装置。所述控制装置包括PC机,用于根据预定控制算法向驱动装置输出控制信号;所述驱动装置包括直流伺服电机驱动器,用于根据所述控制信号改变执行装置中的直流伺服电机的输入电压,从而控制直流伺服电机的转速;PC机与直流伺服电机驱动器通过并口和串口彼此相连并执行数据指令形式的控制信号传输,同时PC机的信号转换接口包括AC6011型PCI槽及D/A,A/D转换器,其中D/A转换器连接直流伺服电机驱动器的模拟口,对直流伺服电机驱动器提供模拟格式的控制信号传输。位置控制系统的执行装置包括直流伺服电机、减速器、联轴器、滚珠丝杠和滚珠丝杠螺母,直流伺服电机通过减速器及联轴器连接滚珠丝杠,滚珠丝杠与滚珠丝杠螺母相匹配,并且滚珠丝杠螺母与运动部件联接;其中直流伺服电机在所述直流伺服电机驱动器提供的所述输入电压下转动,使所述滚珠丝杠转动,从而带动滚珠丝杠螺母及运动部件移动。所述检测装置包括位移传感器及信号转换接口电路,所述位移传感器实时检测执行装置的滚珠丝杠螺母的位移量,并通过信号转换接口电路的A/D转换器将所述位移量转换为数字信号输入所述PC机;其中,所述PC机根据所述位移量与预定位移量之差值按照所述预定控制算法输出所述控制信号,直至所述滚珠丝杠螺母达到预定位移量。所述检测装置还包括分别设置在运动部件行程的起点和终点位置上的限位开关1和限位开关2,当所述运动部件达到其行程起点和终点的极限位置时,所述限位开关1和限位开关2由常开状态转为闭合;所述直流伺服电机驱动器检测所述限位开关1和限位开关2的状态,并且在当任何一个限位开关闭合后向直流伺服电机输出0V电压,从而使所述直流伺服电机停止转动。
在整个直流伺服电机的位置控制系统中,由位移传感器实时检测滚珠丝杠螺母的位置,并将其反馈给PC机,PC机通过比较滚珠丝杠螺母的给定位移与实际位移之间的差值,根据一定的控制算法,向直流伺服电机驱动器输入一定的信号,直流伺服电机驱动器根据这个信号,通过改变直流伺服电机电枢的输入电压来控制直流伺服电机的转速,从而可双向改变滚珠丝杠螺母的线位移。这是一个逐步逼近控制系统的给定值的过程,直至滚珠丝杠螺母到达指定的位置为止。这里的转速传感器可采用磁电式转速传感器、霍尔式转速传感器或光电式转速传感器中的任意一种。
本发明所述位置控制系统还可以实现转速闭环控制,就是使执行机构的直流伺服电机的电机轴达到一个给定的转速。其实现的原理与位置闭环控制的实现大同小异,只是通过转速传感器不断检测电机轴的实时转速,并将其反馈给PC机,PC机再不断通过直流伺服电机驱动器控制伺服电机的转速,直至电机轴转速达到预定的转速,从而实现转速的闭环控制。
图2是本发明实施例的执行装置装配结构示意图。其中,1为直流伺服电机。2为电机支撑架,3为齿盘,4为套筒,5为透盖,6为丝杠左端支撑架,7为导杆,8为滚珠丝杠(螺杆),9为滚珠丝杠螺母,10为运动部件,11为丝杠右端支撑架,12为端盖,13为支撑脚,14为限位开关,15为底板,16为拉杆,17为压板,18为传感器支撑架,19为转速传感器,20为位移传感器。
其中,导杆7为本发明的圆柱形附加导轨。根据运动学原理,所谓的导轨就是将运动构件约束到只有一个自由度的装置。这一个自由度可以是直线运动或者是回转运动。在本机构中,由于仅仅依靠滚珠丝杠并不能约束滚珠丝杠螺母作直线运动。因此,需增加一导杆7来约束滚珠丝杠螺母的旋转运动,使其作直线运动。考虑到导轨的加工制造难易程度,导轨的形式选择圆柱形。为了减少圆柱形导轨的磨损,可以采用直线滚动轴承与其配合的形式,在导杆7上设置与其相配合并联接所述滚珠丝杠螺母的直线滚动轴承这样不仅可以使运动部件的运动灵活自如,而且可以大大地提高传动效率,增加导轨的使用寿命。为提高传动刚度,合理地选择滚珠丝杠的支撑方式及正确的安装是很重要的,在本发明中,所述滚珠丝杠的两端各以一个角接触球轴承双向固定支撑。滚珠丝杠两端分别具有丝杠左端支撑架6和丝杠右端支撑架11。丝杠支撑架的外侧设置端盖12,图3A-3B是所述端盖的结构侧面半剖视图和正面视图。端盖的作用主要为密封轴承和调整轴承的游隙。为了减小外观尺寸,联接端盖与丝杠支撑架的螺钉选为内六角螺钉。因此,在设计端盖时,相应的设计为沉头孔。在所述丝杠支撑架和端盖之间设置弹性调整垫片,弹性调整垫片具有一定的弹性。它的主要作用是通过改变端盖或透盖与丝杆支撑架之间的距离来调整滚动轴承的游隙。调整垫片按材料的不同可以分为金属垫片和非金属垫片。
整个直流伺服电机位置控制系统执行机构的设计目的是构成线位移和角位移双闭环控制系统。应该注意到线位移和角位移闭环控制并不是同时实现的,而是互不交叉、互不影响的。这也就是说在构成线位移闭环控制的时候不存在角位移闭环控制,同样,在构成角位移闭环控制的时候不存在线位移闭环控制。但是当实现角位移闭环控制的时候,应该注意到执行机构的转速在没有到达预定转速时,机构的运动部件可能已经到达行程极限,而在种情况下是难以实现使机构转速到达预定转速这一目的的,即构成不了角位移的闭环控制。通过以上分析,在设计直流伺服电机位置控制系统执行机构时,为了实现角位移闭环控制,应该将丝杠轴与电机轴脱离。对此,可以将联轴器分为齿盘3和套筒4两部分。齿盘3与电机轴固定联接在一起,套筒4联接齿盘与丝杠轴,同时套筒4可以在丝杠轴上轴向移动,以便在构成转速闭环的制时使丝杠与齿盘脱离。图4A-4B示出了所述套筒的侧面剖视图和正面视图。所述套筒包括键槽和销孔,并且套筒与滚珠丝杠通过所述键槽实现键联接,且套筒与齿盘之间通过所述销孔进行销联接。
所述执行装置还包括底板15,在底板15上固定电机支撑架、丝杠支撑架、位移传感器;所述底板的底面设置支撑脚;并且所述电机支撑架、丝杠支撑架与底板之间通过定位销固定。底板实现了整个机构的平稳固定,以及各部件之间的精确定位。
可见,通过本发明,可以对直流伺服电机执行机构的位置和转速实现双闭环控制,构成了一个具有双重功能的闭环控制系统,能够实现精确的位置控制和限位功能,适用于多种实际应用。
以上所述,仅为本发明的具体实施方式,本发明还可以应用在其它设备中;以上描述中的尺寸和数量均仅为参考性的,本领域技术人员可根据实际需要选择适当的应用尺寸,而不脱离本发明的范围。本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求所界定的保护范围为准。
Claims (10)
1.一种直流伺服电机的位置控制系统,其特征在于,包括控制装置、驱动装置、检测装置及执行装置;所述控制装置包括PC机,用于根据预定控制算法向驱动装置输出控制信号;所述驱动装置包括直流伺服电机驱动器,用于根据所述控制信号改变执行装置中的直流伺服电机的输入电压,从而控制直流伺服电机的转速;所述执行装置包括直流伺服电机、减速器、联轴器、滚珠丝杠和滚珠丝杠螺母,直流伺服电机通过减速器及联轴器连接滚珠丝杠,滚珠丝杠与滚珠丝杠螺母相匹配,并且滚珠丝杠螺母与运动部件联接;其中直流伺服电机在所述直流伺服电机驱动器提供的所述输入电压下转动,使所述滚珠丝杠转动,从而带动滚珠丝杠螺母及运动部件移动;所述检测装置包括位移传感器及信号转换接口电路,所述位移传感器实时检测执行装置的滚珠丝杠螺母的位移量,并通过信号转换接口电路将所述位移量转换为数字信号输入所述PC机;其中,所述PC机根据所述位移量与预定位移量之差值按照所述预定控制算法输出所述控制信号,直至所述滚珠丝杠螺母达到预定位移量。
2.根据权利要求1所述的位置控制系统,其特征在于,所述检测装置还包括分别设置在运动部件行程的起点和终点位置上的第一限位开关和第二限位开关,当所述运动部件达到其行程起点和终点的极限位置时,所述第一限位开关和第二限位开关由常开状态转为闭合;所述直流伺服电机驱动器检测所述第一限位开关和第二限位开关的状态,并且在当第一限位开关和第二限位开关闭合后向直流伺服电机输出0V电压,从而使所述直流伺服电机停止转动。
3.根据权利要求1所述的位置控制系统,其特征在于,所述位置控制系统还包括转速闭环控制装置,所述转速闭环控制装置包括转速传感器,用于实时检测直流伺服电机的转速,并将转速值反馈至所述PC机;所述PC机通过所述直流伺服电机驱动器控制直流伺服电机的转速,直至其达到预定转速。
4.根据权利要求3所述的位置控制系统,其特征在于,所述转速传感器采用磁电式转速传感器、霍尔式转速传感器或光电式转速传感器中的任意一种。
5.根据权利要求1所述的位置控制系统,其特征在于,所述执行装置还包括圆柱形附加导轨,用于约束所述滚珠丝杠螺母的旋转运动从而使其保持直线移动;并且圆柱形附加导轨上设置与其相配合并联接所述滚珠丝杠螺母的直线滚动轴承。
6.根据权利要求1所述的位置控制系统,其特征在于,所述滚珠丝杠的两端各以一个角接触球轴承双向固定支撑。
7.根据权利要求6所述的位置控制系统,其特征在于,所述滚珠丝杠的两端分别固定在丝杠支撑架上,并且丝杠支撑架的外侧设置端盖,在所述丝杠支撑架和端盖之间设置弹性调整垫片,所述弹性调整垫片用于改变端盖与丝杠支撑架之间的距离来调整所述角接触球轴承的游隙。
8.根据权利要求1所述的位置控制系统,其特征在于,所述执行装置的联轴器包括齿盘和套筒两部分;所述齿盘与直流伺服电机的电机轴固定联接在一起,所述套筒联接齿盘与滚珠丝杠的丝杠轴,同时套筒可以在丝杠轴上轴向移动,以便在构成转速闭环控制时使滚珠丝杠与齿盘脱离。
9.根据权利要求8所述的位置控制系统,其特征在于,所述套筒包括键槽和销孔,并且套筒与滚珠丝杠通过所述键槽实现键联接,且套筒与齿盘之间通过所述销孔进行销联接。
10.根据权利要求1所述的位置控制系统,其特征在于,所述执行装置还包括底板,在底板上固定电机支撑架、丝杠支撑架、位移传感器;所述底板的底面设置支撑脚;并且所述电机支撑架、丝杠支撑架与底板之间通过定位销固定。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310438001.XA CN103499927B (zh) | 2013-09-14 | 2013-09-14 | 一种直流伺服电机位置控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310438001.XA CN103499927B (zh) | 2013-09-14 | 2013-09-14 | 一种直流伺服电机位置控制系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103499927A true CN103499927A (zh) | 2014-01-08 |
| CN103499927B CN103499927B (zh) | 2016-05-18 |
Family
ID=49865147
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310438001.XA Expired - Fee Related CN103499927B (zh) | 2013-09-14 | 2013-09-14 | 一种直流伺服电机位置控制系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103499927B (zh) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105181906A (zh) * | 2015-10-10 | 2015-12-23 | 中国石油大学(华东) | 一种研究液面高度对流体晃动运动影响的实验装置 |
| CN106171833A (zh) * | 2016-07-11 | 2016-12-07 | 北京航空航天大学 | 一种基于高度变化改变流量的高效节能灌溉系统及方法 |
| CN106598086A (zh) * | 2017-02-27 | 2017-04-26 | 沈阳卓翼航空科技有限公司 | 农用无人机直线伺服操控装置 |
| CN108145528A (zh) * | 2016-12-05 | 2018-06-12 | 新昌县嘉德科技发展有限公司 | 一种机床的控制装置 |
| CN108483261A (zh) * | 2018-04-20 | 2018-09-04 | 北京轩宇智能科技有限公司 | 一种直线运动监测反馈模块及其监测方法和应用 |
| CN109282740A (zh) * | 2018-11-01 | 2019-01-29 | 上海才义工程项目管理有限公司 | 一种材料检测系统 |
| CN109725223A (zh) * | 2019-02-19 | 2019-05-07 | 上海达野智能科技有限公司 | 减速机装配检测装置 |
| CN110597308A (zh) * | 2019-09-06 | 2019-12-20 | 北京精密机电控制设备研究所 | 一种伺服装置 |
| CN110986666A (zh) * | 2019-12-17 | 2020-04-10 | 西安奇维科技有限公司 | 一种基于位置检测的高可靠性电动开栓结构及其方法 |
| CN112916664A (zh) * | 2021-01-25 | 2021-06-08 | 新代科技(苏州)有限公司 | 一种双驱耦合压料控制方式 |
| CN113700813A (zh) * | 2020-05-21 | 2021-11-26 | 北京机械设备研究所 | 一种具有自锁功能的直线运动装置及直线运动驱动方法 |
| CN114474515A (zh) * | 2021-12-09 | 2022-05-13 | 煤炭科学技术研究院有限公司 | 一种可实现定距控制的平板硫化成型机 |
| CN115276497A (zh) * | 2022-08-03 | 2022-11-01 | 魅杰光电科技(上海)有限公司 | 晶圆检测用运动系统及其控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0876852A (ja) * | 1994-09-02 | 1996-03-22 | Yaskawa Electric Corp | カム装置 |
| US20030001530A1 (en) * | 2001-06-29 | 2003-01-02 | O'rourke Kenneth | Fail passive servo controller |
| CN101840064A (zh) * | 2010-04-22 | 2010-09-22 | 中国科学院长春光学精密机械与物理研究所 | 一种直流电机型力促动器的控制方法及电控装置 |
| CN101587327B (zh) * | 2008-05-21 | 2010-12-15 | 深圳市先阳软件技术有限公司 | 工业控制平台上的通用运动控制系统和控制方法 |
-
2013
- 2013-09-14 CN CN201310438001.XA patent/CN103499927B/zh not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0876852A (ja) * | 1994-09-02 | 1996-03-22 | Yaskawa Electric Corp | カム装置 |
| US20030001530A1 (en) * | 2001-06-29 | 2003-01-02 | O'rourke Kenneth | Fail passive servo controller |
| CN101587327B (zh) * | 2008-05-21 | 2010-12-15 | 深圳市先阳软件技术有限公司 | 工业控制平台上的通用运动控制系统和控制方法 |
| CN101840064A (zh) * | 2010-04-22 | 2010-09-22 | 中国科学院长春光学精密机械与物理研究所 | 一种直流电机型力促动器的控制方法及电控装置 |
Non-Patent Citations (1)
| Title |
|---|
| 叶晓平: ""基于PC的开放式测控系统的研究"", 《制造技术与机床》, no. 8, 31 August 2004 (2004-08-31) * |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105181906A (zh) * | 2015-10-10 | 2015-12-23 | 中国石油大学(华东) | 一种研究液面高度对流体晃动运动影响的实验装置 |
| CN106171833A (zh) * | 2016-07-11 | 2016-12-07 | 北京航空航天大学 | 一种基于高度变化改变流量的高效节能灌溉系统及方法 |
| CN106171833B (zh) * | 2016-07-11 | 2019-08-06 | 北京航空航天大学 | 一种基于高度变化改变流量的高效节能灌溉系统及方法 |
| CN108145528A (zh) * | 2016-12-05 | 2018-06-12 | 新昌县嘉德科技发展有限公司 | 一种机床的控制装置 |
| CN106598086A (zh) * | 2017-02-27 | 2017-04-26 | 沈阳卓翼航空科技有限公司 | 农用无人机直线伺服操控装置 |
| CN108483261B (zh) * | 2018-04-20 | 2024-02-27 | 北京轩宇智能科技有限公司 | 一种直线运动监测反馈模块及其监测方法和应用 |
| CN108483261A (zh) * | 2018-04-20 | 2018-09-04 | 北京轩宇智能科技有限公司 | 一种直线运动监测反馈模块及其监测方法和应用 |
| CN109282740A (zh) * | 2018-11-01 | 2019-01-29 | 上海才义工程项目管理有限公司 | 一种材料检测系统 |
| CN109725223A (zh) * | 2019-02-19 | 2019-05-07 | 上海达野智能科技有限公司 | 减速机装配检测装置 |
| CN110597308A (zh) * | 2019-09-06 | 2019-12-20 | 北京精密机电控制设备研究所 | 一种伺服装置 |
| CN110986666A (zh) * | 2019-12-17 | 2020-04-10 | 西安奇维科技有限公司 | 一种基于位置检测的高可靠性电动开栓结构及其方法 |
| CN113700813A (zh) * | 2020-05-21 | 2021-11-26 | 北京机械设备研究所 | 一种具有自锁功能的直线运动装置及直线运动驱动方法 |
| CN112916664A (zh) * | 2021-01-25 | 2021-06-08 | 新代科技(苏州)有限公司 | 一种双驱耦合压料控制方式 |
| CN114474515A (zh) * | 2021-12-09 | 2022-05-13 | 煤炭科学技术研究院有限公司 | 一种可实现定距控制的平板硫化成型机 |
| CN114474515B (zh) * | 2021-12-09 | 2024-07-05 | 煤炭科学技术研究院有限公司 | 一种可实现定距控制的平板硫化成型机 |
| CN115276497A (zh) * | 2022-08-03 | 2022-11-01 | 魅杰光电科技(上海)有限公司 | 晶圆检测用运动系统及其控制方法 |
| CN115276497B (zh) * | 2022-08-03 | 2024-03-01 | 魅杰光电科技(上海)有限公司 | 晶圆检测用运动系统及其控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103499927B (zh) | 2016-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103499927A (zh) | 一种直流伺服电机位置控制系统 | |
| CN205064770U (zh) | 一种宏微双驱动传动平台 | |
| CN205097207U (zh) | 一种用于机器人关节的串联弹性驱动器 | |
| CN103101049A (zh) | 一种具有新型冗余驱动支链的三自由度平面并联机构 | |
| CN203596701U (zh) | 直流伺服电机控制装置执行机构 | |
| CN201488716U (zh) | 制动主缸空行程检测装置 | |
| CN104141759A (zh) | 一种预紧力可控的丝杠螺母副轴向预紧装置 | |
| CN205384352U (zh) | 一种拉杆凸轮式行程开关检测装置 | |
| CN103487183A (zh) | 自动扭矩测试系统的扭矩加载装置 | |
| CN103575203B (zh) | 一种可调预压力的植物叶片厚度无损测量仪及测量方法 | |
| CN203339929U (zh) | 磁力耦合器用液压推杆调速机构 | |
| CN205870589U (zh) | 一种可调刚度机器人关节结构 | |
| CN102751899B (zh) | 微纳米级仿生多自由度驱动装置 | |
| CN201902672U (zh) | 一种行程控制开度指示机构 | |
| CN206175590U (zh) | 一种双轴共轨直线运动装置 | |
| CN110285290B (zh) | 一种智能操控支撑支架 | |
| CN205940975U (zh) | 带有移动滑台的机器人关节减速器传动性能测试装置 | |
| CN201483857U (zh) | 贴膜机的贴膜自动对位装置 | |
| CN204664331U (zh) | 一种新型补偿侧向间隙传动机构 | |
| CN102588649A (zh) | 一种伺服阀及其零位补偿方法 | |
| CN209623663U (zh) | 位移传感器的校正装置 | |
| CN203831628U (zh) | 橡胶硫化剂进出模装置 | |
| CN205401895U (zh) | 一种直线式精密调节阀 | |
| CN108458150B (zh) | 一种电动直行程阀执行器 | |
| CN2802224Y (zh) | 阀门电动执行机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20160518 Termination date: 20180914 |