CN103429167A - 用于使用超声自动且自主地确定血液动力学和心脏参数的系统、方法以及装置 - Google Patents
用于使用超声自动且自主地确定血液动力学和心脏参数的系统、方法以及装置 Download PDFInfo
- Publication number
- CN103429167A CN103429167A CN2012800069148A CN201280006914A CN103429167A CN 103429167 A CN103429167 A CN 103429167A CN 2012800069148 A CN2012800069148 A CN 2012800069148A CN 201280006914 A CN201280006914 A CN 201280006914A CN 103429167 A CN103429167 A CN 103429167A
- Authority
- CN
- China
- Prior art keywords
- scanning
- blood vessel
- ultrasonic
- parameter
- blood
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 113
- 230000000747 cardiac effect Effects 0.000 title claims abstract description 101
- 230000000004 hemodynamic effect Effects 0.000 title claims abstract description 40
- 238000002604 ultrasonography Methods 0.000 title claims abstract description 36
- 210000004204 blood vessel Anatomy 0.000 claims description 208
- 239000000523 sample Substances 0.000 claims description 102
- 230000017531 blood circulation Effects 0.000 claims description 49
- 238000007689 inspection Methods 0.000 claims description 47
- 238000012545 processing Methods 0.000 claims description 18
- 239000008280 blood Substances 0.000 claims description 17
- 230000035485 pulse pressure Effects 0.000 claims description 17
- 238000012544 monitoring process Methods 0.000 claims description 16
- 210000000709 aorta Anatomy 0.000 claims description 15
- 210000004369 blood Anatomy 0.000 claims description 15
- 238000001514 detection method Methods 0.000 claims description 13
- 230000002685 pulmonary effect Effects 0.000 claims description 13
- 238000011282 treatment Methods 0.000 claims description 13
- TVZRAEYQIKYCPH-UHFFFAOYSA-N 3-(trimethylsilyl)propane-1-sulfonic acid Chemical compound C[Si](C)(C)CCCS(O)(=O)=O TVZRAEYQIKYCPH-UHFFFAOYSA-N 0.000 claims description 12
- 238000001914 filtration Methods 0.000 claims description 12
- 238000010586 diagram Methods 0.000 claims description 9
- 230000011218 segmentation Effects 0.000 claims description 8
- 238000005259 measurement Methods 0.000 claims description 7
- 238000004891 communication Methods 0.000 claims description 5
- 230000001133 acceleration Effects 0.000 claims description 4
- 230000003068 static effect Effects 0.000 claims description 4
- 230000008859 change Effects 0.000 claims description 2
- 241001597008 Nomeidae Species 0.000 claims 1
- 241000439496 Varanus dumerilii Species 0.000 claims 1
- 210000001367 artery Anatomy 0.000 claims 1
- 230000001174 ascending effect Effects 0.000 claims 1
- 230000010354 integration Effects 0.000 claims 1
- 230000000007 visual effect Effects 0.000 claims 1
- 210000000038 chest Anatomy 0.000 description 27
- 230000008569 process Effects 0.000 description 13
- 230000006870 function Effects 0.000 description 11
- 238000007726 management method Methods 0.000 description 11
- 229920003045 dextran sodium sulfate Polymers 0.000 description 10
- 235000019329 dioctyl sodium sulphosuccinate Nutrition 0.000 description 10
- 230000035488 systolic blood pressure Effects 0.000 description 9
- 230000035487 diastolic blood pressure Effects 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000036541 health Effects 0.000 description 5
- 230000002792 vascular Effects 0.000 description 5
- 239000012530 fluid Substances 0.000 description 4
- 230000008602 contraction Effects 0.000 description 3
- 239000013078 crystal Substances 0.000 description 3
- 238000012549 training Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000004872 arterial blood pressure Effects 0.000 description 2
- 210000000481 breast Anatomy 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 2
- 238000003708 edge detection Methods 0.000 description 2
- 230000001970 hydrokinetic effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000000474 nursing effect Effects 0.000 description 2
- 230000036581 peripheral resistance Effects 0.000 description 2
- 230000029058 respiratory gaseous exchange Effects 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 238000009553 vascular ultrasonography Methods 0.000 description 2
- 230000000283 vasomotion Effects 0.000 description 2
- RLLPVAHGXHCWKJ-IEBWSBKVSA-N (3-phenoxyphenyl)methyl (1s,3s)-3-(2,2-dichloroethenyl)-2,2-dimethylcyclopropane-1-carboxylate Chemical compound CC1(C)[C@H](C=C(Cl)Cl)[C@@H]1C(=O)OCC1=CC=CC(OC=2C=CC=CC=2)=C1 RLLPVAHGXHCWKJ-IEBWSBKVSA-N 0.000 description 1
- 201000001320 Atherosclerosis Diseases 0.000 description 1
- 241000219000 Populus Species 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000002583 angiography Methods 0.000 description 1
- 210000001765 aortic valve Anatomy 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000002651 drug therapy Methods 0.000 description 1
- 238000002592 echocardiography Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 230000003862 health status Effects 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 238000011221 initial treatment Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4477—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device using several separate ultrasound transducers or probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0883—Clinical applications for diagnosis of the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0891—Clinical applications for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
- A61B8/4494—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer characterised by the arrangement of the transducer elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5223—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for extracting a diagnostic or physiological parameter from medical diagnostic data
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/30—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for calculating health indices; for individual health risk assessment
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Pathology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Radiology & Medical Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Gynecology & Obstetrics (AREA)
- Vascular Medicine (AREA)
- Hematology (AREA)
- Physiology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Cardiology (AREA)
- Epidemiology (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Primary Health Care (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
本公开内容涉及用于确定心脏和/或血液动力学参数的超声装置、系统以及方法,并且特别地涉及如下系统和方法:在该系统和方法中,以自动且自主因此不依赖于超声图像及其熟练的护理者分析的非侵入性方式确定心脏和/或血液动力学参数。
Description
技术领域
本公开涉及一种用于确定心脏和/或血液动力学参数的超声系统、装置以及方法,并且特别地涉及这样的系统、装置以及方法,在该系统、装置以及方法中,以非侵入或微创的方式确定心脏和/或血液动力学参数。
背景技术
对于在监测和/或治疗病人中获取必要的心脏和血液动力学参数,需要心脏监测。这样的心脏监测可以通过不同等级的侵入力(例如侵入、微创以及非侵入)的不同技术来实现。例如,血管造影、血管影像、心导管插入、右心导管插入、左心导管插入可以考虑侵入或微创心脏手术。或者,可以考虑基于例如超声心动图的技术的超声,用于确定可用的心脏和/或血液动力学参数的非侵入性方法。
单独的心脏监测技术具有其优点和缺点。特别地,侵入和/或微创技术可以提供精确的心脏和/或血液动力学参数,然而,除非绝对必要并且别无选择,侵入力等级可以极大地阻止个人或从业医师采取这样的手术。
侵入方法和技术的一种替换包括使用超声检查,特别地,在非侵入性技术中的多普勒超声(例如超声心动图)。当这样的超声技术提供并改进经由导管插入的心脏监测的侵入特性时,其限于所监测的心脏和/或血液动力学参数的精确性极大地依赖于执行手术的从业医师和/或技师的技能、经验和专业知识。因此,执行该扫描的从业医师的技能水平和敏锐极大地影响并限制了心脏和/或血液动力学参数的可靠性和重复性。另外,由于从业医师的技能水平所施加的限制,当前的超声心动图不能够并且不提供与由侵入方法所提供的心脏和/或血液动力学参数相同的心脏和/或血液动力学参数,因此保持了对侵入和微创手术的需要。因此,通过非侵入性方法一些心脏和/或血液动力学参数是不可用的。这样的参数例如心脏内压力仅可以以侵入方式进行测量,其中斯旺甘兹氏导管(Swan-GanzCatheter)提供了黄金标准手术(gold standard procedure)。
发明内容
系统并不需要熟练的护理者的参与以确定心脏和/或血液动力学参数,而是根据本公开的优选的实施方式的系统、装置和方法提供自动且自主地确定心脏和/或血液动力学参数。
在本申请的上下文中,术语“固定扫描区域”或“静止扫描区域”可以互换地使用以表示正在使用超声探头进行扫描的被检者的躯干附近的区域,其中在执行该扫描时将超声探头基本上保持在固定位置和/或静止位置。可以由用户、医生、护理者、受训的技师、技工执行超声扫描或由受检者自己执行超声扫描,其中探头基本上在躯干附近的一个位置固定和/或静止。因此,基本上是在执行超声扫描的人员在不移动探头的情况下执行扫描,其中基本上提供在固定或其他静止位置上的超声扫描。例如,沿着受检者的躯干、胸部、背侧等。扫描区域是受检者的胸部区域的用于测量、获取和/或确定血液动力学和/或心脏参数的固定扫描区域。可选地,可以利用根据本公开的系统来测量、获取和/或确定关于有关受检者的任意扫描区域的多个参数。
在本申请的上下文中,术语“低分辨率掩模检测”是指利用低分辨率掩模和/或滤波器(例如低分辨率边缘检测滤波器)来估计超声反射数据信号的处理。
在本申请的上下文中,术语“高分辨率掩模检测”是指利用高分辨率掩模和/或滤波器(例如高分辨率边缘检测滤波器)来估计超声反射数据信号的处理。
在本申请的上下文中,术语“大约”当指出一个值时,是指引用的值的加或减10%。
在本申请的上下文中,术语“自主”指的是独立地并且没有用户辅助地实施或执行固有方法、处理或计算。
在本申请的上下文中,术语“超声换能器”可以指的是在现有技术中已知并接受的任意类型的超声换能器,例如,包括但不限于,现有技术中已知并被接受的包括多个压电元件和晶体的一维和/或二维和/或三维换能器。
在本申请的上下文中,术语“超声产生元件”可以例如包括但不限于电容性微机械超声换能器(cMUT)、压电晶体、陶瓷等。
在本申请的上下文中,本文中的术语“Rvir”或虚拟半径指的是在压力约等于零时的绝对条件下的血管半径。
在本申请的上下文中,本文中的术语“Rdia”与舒张半径可互换,指的是心动周期舒张期间的血管半径。
在本申请的上下文中,本文中的术语“Rsys”与收缩半径可互换,指的是心动周期收缩期间的血管半径。
在本申请的上下文中,本文中的术语“Tpp”、“tpp”或脉压时间指的是心动周期脉压期间的时间长度。
在本申请的上下文中,本文中的术语“Tsys”、“tsys”或收缩时间指的是心动周期收缩期间的时间长度。
在本申请的上下文中,本文中的术语“RP7”和/或“P7”指的是对应于在最小压力下理想的血管半径的血管半径。
在本申请的上下文中,以下简略的附图标记用于表示现有技术中通常所理解、已知或接受的定义术语,详细如下:P=压力;PP-脉压;Psys-收缩压;Pdia-舒张压;δ-血管形变;ρ-血液密度;c-压力波传播速度;En-有效杨模块;Rvir-虚拟血管半径;Rsys/Rs-收缩半径;Rdia/Rd-舒张半径;h-血管壁厚度;Us-收缩血流速度;Ud-舒张血流速度;λ-杨模块系数;k-常数。
虽然之前的描述提供了用于基于受检者的胸部区域的超声扫描来测量、获取和/或确定心脏和/或血液动力学参数的具体示例,本公开的系统和方法不限于这样的应用。
本公开的可选实施方式提供了一种在将扫描区域的图像呈现给用户或不显示给用户的情况下自动且自主地确定心脏和/或血液动力学参数的非侵入性超声系统,并且其中扫描区域是受检者的胸部区域(例如胸部)上的固定区域,该系统包括:超声探头,该超声探头包括用于扫描胸部上的固定区域的多个超声换能器;以及探头扫描引擎,该探头扫描引擎用于控制所述多个超声换能器并且用于处理从超声换能器获得的数据以产生一组血管参数;以及处理器,该处理器用于根据血管参数来推断和/或确定心脏和/或血液动力学参数。
本公开的可选实施方式提供了一种在将扫描区域的图像不呈现给用户的情况下自动且自主地确定心脏参数的非侵入性超声探头,并且其中扫描区域是胸部上的固定区域,探头包括包含用于扫描胸部上的固定区域的多个超声换能器的单个壳体。
本公开的可选实施方式提供了一种基于上躯干(例如受检者的胸部)上的固定扫描区域的超声和多普勒超声扫描的组合自动且自主地确定受检者的心脏和/或血液动力学参数的非侵入性方法,其中在不将固定扫描区域的超声图像呈现给用户和/或从业医师和/或护理者的情况下执行扫描,该方法包括:利用包括多个超声换能器的阵列的超声探头来扫描受检者的胸部上的固定扫描区域,并且自主地确定固定扫描区域内的至少一个血管的至少两个血管参数;以及进一步处理至少一个血管的所述至少两个血管参数以确定和/或说明受检者的心脏和/或血液动力学参数。
除非另外定义,本公开的各种实施方式可以以多个格式、平台提供给终端用户,并且输出到计算机可读存储器、计算机显示器、打印机、网络上的计算机或用户中的至少一个。
本文所提供的材料、方法以及示例仅为说明性的并不旨在限制。
本公开的方法和系统的实现涉及手动地、自动地或它们的组合地执行或完成某些选择的任务或步骤。另外,根据本公开的方法和系统的优选实施方式的实际仪器和设备,若干选择的步骤能够通过硬件或通过任意固件的任意操作系统上的软件或它们的组合来实现。例如,作为硬件,本公开的选择的步骤能够实现为芯片或电路。作为软件,本公开的选择的步骤能够实现为由使用任意适当的操作系统的计算机所执行的多个软件指令。在任意情况下,本公开的方法和系统的所选择的步骤能够描述为由数据处理器(例如用于执行多个指令的计算平台)执行。
附图说明
本文中仅通过示例参照附图描述了本公开的实施方式。现在具体参照详细的附图,要强调的是,示出的细节仅作为示例并且用于本公开的优选实施方式的说明性讨论的意图,并且将该示出的细节被呈现以便于提供被认为是实施方式的原理和概念方面的最有用并易于理解的描述。利用附图所采用的描述使得对于本领域中的技术人员,本公开的实施方式的若干形式在实际中可以如何实施是显然的。
在附图中:
图1A-1C是用于使用超声自动且自主地确定血液动力学和心脏参数的示例性系统的示意性框图;
图2A-2D是系统的示例性探头的示意性框图;
图2E-2F是示例性探头的替代实施方式的示意性框图;
图3是用于自动且自主地确定受检者的心脏和/或血液动力学参数的示例性方法;
图4A-4B是用于自动扫描受检者的胸部的固定区域的示例性方法;
图4C是示出图4A的方法的示意性说明框图;
图5A是用于自动扫描受检者的胸部的固定区域以确定血管直径和中心的示例性方法的流程图;
图5B是示出图5A的方法的示意性说明框图;
图6A是用于自动地扫描受检者的胸部的固定区域以确定血管参数的示例性方法的流程图;
图6B是示出图6A的方法的示意性说明框图;
图7是用于基于多普勒超声来自动确定血液动力学和心脏参数的示例性方法的流程图;
图8是如图7中示出的用于自动地确定血液动力学和心脏参数的速度时间曲线图的示意性说明图;
图9是用于基于多普勒超声来自动确定和计算血液动力学和心脏参数的示例性方法的流程图;
图10是用于自动扫描受检者的胸部的固定区域以识别至少一个或更多个血管对象的示例性方法的流程图;
图11用于自动扫描受检者的胸部的固定区域以随时间变化对准并跟踪感兴趣的血管的示例性方法的流程图;
图12A-B是如图11中所示的用于对准并跟踪感兴趣的血管的方法的示意性示出。
图13是根据本公开的可选实施方式的用于处理血管对象数据以基于超声和多普勒扫描自动地确定血液动力学和心脏参数的可选方法的流程图;
图14示出根据本公开的可选实施方式的说明性示意图;以及
图15是根据本公开的可选实施方式的用于处理血管对象数据以基于超声和多普勒扫描自动地确定血液动力学和心脏参数的可选方法的流程图。
具体实施方式
可以参照附图和所附描述更好地理解本公开的原理和操作。贯穿附图使用下面所列的附图标记以表示具有相似功能、意义、作用或目的的对象。
n1-n8超声换能器;
100自动且自主的超声系统
102系统管理处理器;
104用户接口;
110超声探头;
112扫描引擎;
114US换能器阵列;
115IR传感器阵列
116复用器;
118探头控制器;
120决策支持系统;
800速度时间曲线;
802a-b心动周期曲线段;
802a脉压段;
802b压降段;
804a-d极值点、最小和最大点;
804a,d舒张点;
804b最大速度;
804c瓣膜关闭;
806心动周期子段(i);
n多个超声换能器;
n-x多个超声换能器的子集;
sl扫描线;
dsl多普勒扫描线;
fdsl侧翼多普勒扫描线;
el基于扫描线的弦长;
v感兴趣的血管;
ve血管中心;
vr血管半径;
z n个换能器的最优换能器。
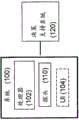
现在参照附图,图1A示出了系统100的示意性框图,根据本公开的一个实施方式,包括系统100定制和/或系统100特有的超声扫描探头110,以及系统管理处理器102。系统100用于利用超声探头110扫描受检者上的区域以便于获取有关扫描区域的数据。扫描区域是受检者的胸部的固定扫描区域,以测量、获取和/或确定血液动力学和/或心脏参数。可选地,可以利用系统来测量、获取和/或确定关于受检者的有关任意扫描区域的多个参数。
虽然之前的描述提供了用于基于受检者的胸部的超声扫描来测量、获取和/或确定心脏和/或血液动力学参数的具体示例,但是本公开的系统和方法不限于这样的应用。可以利用系统100来扫描有关受检者的身体的其他任意区域以确定与扫描区域(例如包括但不限于肢体)内的扫描区域相关联的多个参数。
将用户接口104提供给和/或以其他方式耦合到系统管理处理器102。系统管理处理器102可以例如包括但不限于计算机、个人数字助理(PDA)、移动计算机、移动处理装置、移动通信装置、移动电话等包括用于处理数据、管理数据流和/或控制流以及处理来自多个源的信息的处理器的装置。
可选地,可以以至少一个可选形式来提供至少一个或更多个用户接口104,例如,包括但不限于显示器、键盘、鼠标、扬声器等现有技术中已知的用于与系统100和特别地与系统管理处理器102的人机接口的装置。
将探头110设置为利用扫描引擎112可控的超声探头的形式。可选地,扫描引擎112与系统管理处理器102通信。可选地可以将扫描引擎112与系统管理处理器102之间的通信设置为有线、无线、蜂窝等通信方法和/或协议的至少任意一个或多个形式。
探头110包括多个超声换能器。可选地,探头110包括至少一个超声换能器。探头110可以包括至少4个或更多个超声换能器。可选地,探头110可以包括多达10个超声换能器。作为示例,探头110包括8个超声换能器,n1、n2、n3、n4、n5、n6、n7以及n8。探头110包括至少两个或更多个超声换能器,例如2、或3、或4、或5、或6、或7、或8、或9、或10个单独的超声换能器。
可选地,每个超声换能器设置有现有技术中已知并接受的压电元件和/或晶体等超声生成材料的形式的多个超声元件。可选地,利用探头110设置的每个超声换能器可以例如包括至少32并且多达约256个超声元件以及更具体地48或更多个超声元件。例如,超声元件可以是压电元件、cMUT等超声生成装置。超声元件和换能器共同地用于产生给定扫描区域上的超声扫描线(sl)。可选地,探头110可以包括至少一个或更多个一维(1D)超声换能器、二维(2D)超声换能器和/或三维(3D)超声换能器或它们的任意组合。
利用扫描引擎112可以选择性地并特定地控制单独的超声扫描线。扫描引擎112用于通过控制多个超声换能器和超声元件来控制探头110。复用器116(图2A-2D)与扫描引擎112和探头110相关联和/或以其他方式接口或耦合以控制单独的超声元件和由此产生的扫描线。
探头110可以例如产生扇形扫描相控阵超声和/或多普勒超声信号等信号。
探头110用于非侵入性工具以提供可以在估计和/或监测受检者例如人和/或动物的扫描区域中使用的数据和/或信息。由探头110在受检者100上的位置来确定扫描区域,以便于使得超声元件能够生成和/或检测在扫描区域内和/或扫描区域附近反射的超声信号。可以利用探头110估计和/或监测由扫描区域提供并从扫描区域获取的数据和/或超声信号。
可选地,超声信号和/或数据可以用于提取扫描区域的超声图像和/或多普勒超声图像。可选地,可以利用用户接口104以图像的形式将所提取的超声图像显示给系统操作员例如保健员、医生、护士、技工。
超声信号和/或数据用于提取与扫描区域的图像和/或多普勒超声图像不相关的超声和/或多普勒数据。可选地,可以例如利用用户接口104以显示器的形式将所提取的超声数据显示给系统操作员。
在图1B中示出了本公开的可选实施方式,其中,扫描引擎112耦合到探头110或以其他方式与探头110集成。
图1C中示出了本公开的可选实施方式,其中,系统100还耦合到决策支持系统120或以其他方式与决策支持系统120相关联。可选地,可以以内勤、呼叫中心、保健员、门诊流动护理、远程医疗中心、医疗决策支持系统、护理者决策支持系统的形式来提供决策支持系统120以便于基于利用如前面所描述的系统100所提供的参数和数据来进一步处理、分析和/或治疗决策支持。
在替代实施方式中,系统100用于扫描扫描区域例如受检者的胸部区域上的固定或静止的扫描区域。系统100擅于在不将图像例如超声图像显示给系统操作员和/或受检者的情况下扫描固定扫描区域。系统100适用于对受检者的固定扫描区域的自动且自主超声和多普勒扫描。
另外,系统100用于从受检者的胸部区域(例如胸)上的固定扫描区域确定受检者的血液动力学和/或心脏参数。替代实施方式用于在不将任意超声信号显示给系统操作员的情况下确定来自胸上的固定扫描区域的血液动力学和/或心脏参数,然而,可选地,可以将固定扫描区域的图像提供给受检者和/系统操作员。
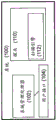
图2A-2D提供了根据本公开的可选实施方式的针对探头110的可选配置的示意性示出,所述探头110包括在用于生成和读取超声信号的超声换能器阵列114中的至少两个或更多个超声换能器、用于控制超声换能器114的阵列的复用器116以及利用扫描引擎112协调探头110的控制和处理的探头控制器118。
图2A-2B示出了探头110的可选配置,其中,将换能器114和复用器116的阵列设置在单个的壳体中,然而可以如图2A中所示出的将探头控制器118可选地设置在相同的壳体中,或如图2B中所示出的将探头控制器118例如作为引擎112的一部分可选地设置在独立的壳体中。
图2C提供了探头110的附加的示出,如将超声换能器114的阵列包括在单个的壳体中而将复用器116和探头控制器118例如设置为扫描引擎112的一部分而设置在独立的壳体中。
图2D提供附加的可选实施方式,其中探头110还包括至少一个或更多个IR传感器115。可选地,IR传感器115用于确定血液饱和度以便于识别探头扫描区域内的至少一个或更多个感兴趣的血管。
图2E-2F提供了根据本公开的可选实施方式的探头110的示意性示出,其中超声探头包括多个超声换能器(n),可选地包括至少两个或更多个换能器。特别地,可以存在四个、六个、八个或十个超声换能器。说明性地,存在八个超声换能器。
虽然所附说明书提供了包括8个换能器的探头的描述,要理解的是,所利用的换能器的数目是用于说明的目的,使得本公开的探头不限于预定的有限数目的换能器。然而可以利用包括八个超声换能器的探头描述所述功能,同样地可以利用更少数目的换能器来实现,因此,本公开的实施方式不限于8个或4个换能器,而可以被生成以具有包括至少两个或更多个超声换能器的多个换能器。
本公开的可选实施方式用于包括至少2个换能器的超声探头110。可选地,根据本公开的可选实施方式,可以相对于彼此以独特的方式布置换能器。可以布置包括至少2个或更多个超声换能器的超声探头110使得将6个换能器设置为六角形配置,使得将6个换能器的每个设置在六角形的顶点附近并且将至少2个或更多个换能器设置为沿着六个六角形顶点之间定义的任意两条弦。
可选地,探头110可以包括至少一个或更多个一维(1D)超声换能器、二维(2D)超声换能器和/或三维(3D)超声换能器或它们的任意组合。
可选地,探头110可以包括2D和/或3D换能器的组合,该2D和/或3D换能器独立地布置使得多个二维(2D)换能器可以形成有关探头110的第一布置,而多个三维(3D)换能器可以产生有关探头110的第二布置。例如,探头110可以包括6个换能器,该6个换能器布置在包括第一三角形布置和第二三角形布置的六角星结构中,该第一三角形布置包括三(3)个2D换能器,该第二三角形布置包括三(3)个3D换能器。
可选地,探头110可以产生至少128个或更多个利用扫描引擎120可控的扫描线。
探头110的可选实施方式,其中每个换能器(n)设置有多个超声产生元件(例如包括但不限于压电晶体、压电陶瓷、cMUT等)。例如每个换能器可以包括从大约32个超声压电元件至大约256个超声压电元件。
可选地,用于探头110的超声换能器(n)的每个超声换能器可以包括相同或不同数目的压电元件。例如,可选探头110包括n个超声换能器,其中n=8(n1-n8)总共可以具有大约48个超声元件。例如,可选探头110包括n个超声换能器,其中,可以配置为n=8{n1…n8}使得{n1,n3,n4,n7}可以设置有64个超声元件,而{n2,n5,n6}可以设置有32个超声元件,并且{n8}可以设置有128个超声元件等类似的布置。
图3示出了用于利用如图1A-1C中所示的根据本公开的可选实施方式的系统100来确定血液动力学和/或心脏参数的方法。可选地,用于利用系统100基于受检者的胸部区域的超声扫描来测量、获得和/或确定心脏和/或血液动力学参数的方法始于阶段301,该阶段结合在受检者的胸部区域附近的固定扫描区域的超声和多普勒超声扫描,利用探头110来执行该扫描。
可选地,固定扫描区域在胸部区域的任意区域和/或部分之内,例如包括但不限于前、后、右侧、左侧、胸椎、胸部、腋窝等胸部区域的部分。特别地,在胸部上来执行固定扫描区域。
在替代实施方式中,固定扫描区域是这样的:一旦扫描区域位置确定,则将探头放置在该区域上并且在不显著地移动探头的情况下基本上在该扫描区域执行扫描,使得探头保持在相对于扫描区域(例如胸部区域)的表面基本固定或静止的位置。
利用探头110所提供的超声(图4A-4C)和多普勒超声(图6A-6B)扫描的组合的终止始于阶段302,其中系统100自动且自主地确定与在下面的固定扫描区域内所检测的至少一个或更多个血管相关联的至少两个血管属性。在图4A和图5A的流程图中更详细地提供了描述用于确定至少两个或更多个血管属性的方法的更多细节。对于在固定扫描区域下面的至少一个或更多个血管所确定的血管属性,包括具有时间戳的血管半径和血液速度。
接着,在阶段303,系统100进一步处理至少两个或更多个血管参数以获取和/或确定多个血液动力学和心脏参数。利用系统管理处理器102、扫描引擎112以及决策支持系统120来提供阶段303所描述的进一步处理。可选地,可以利用决策支持系统120基于在阶段302中确定的所述至少两个血管参数来执行进一步处理。
在替代实施方式中,血液动力学和/或心脏参数可以例如包括但不限于每搏输出量、每搏输出量指数、心率、心输出量、心脏指数、收缩压、舒张压、平均动脉压、心脏动力、心脏指数、每搏输出量的变化、总外周阻力等。
可选地,可以将血液动力学和/或心脏参数显示和/或呈现给系统操作源、受检者、保健员、决策支持系统、辅助装置、通信装置等以确定下一步动作,例如包括但不限于根据与所确定的血液动力学和/或心脏参数相关的标准的医学实践和手术的进一步监测、医疗干预、药物治疗过程等。
图4A示出了更详细地描述用于将包括多个超声换能器并且其中每个超声换能器包括超声元件(例如压电元件和/或晶体)的阵列的探头110与超声和多普勒扫描的结合的图3的阶段302的流程图。图4A中示出的各个阶段,特别是阶段404和阶段405,在图4C中示意性地示出。
虽然以上描述对具有八个超声换能器且每个超声换能器包括至少48个超声元件的探头110进行了描述,但是针对用于确定心脏和血液动力学参数的系统和方法的本公开不限于这样的探头,因为本申请的系统和方法可以适于利用能够产生多个超声扫描线(例如包括但不限于相控阵列、线性扫描)的多换能器超声探头进行工作。
本方法始于阶段401,其中,在固定扫描区域上激活多换能器超声探头,产生高达约5MHz并且更特别地2.5MHz的超声信号。
利用扫描引擎112来有效地控制利用探头110产生的超声信号以生成、发送并且将所需的超声信号传播到固定扫描区域内的探头110下的组织。探头110提供相控阵列超声信号或可选地连续的超声信号。接着,所生成的超声信号被反射回探头110,并且利用探头110的(n)超声元件检测反射的超声信号,并且可选地在阶段402b对所反射的数据进行处理和/或在阶段402a对所反射的数据进行存储以进行离线处理。可选地,基本上可以在阶段402b中实时地在线处理一些数据,而在阶段402a中可以对其他数据进行离线处理。可选地,基本上可以在阶段402b中实时地提供初始处理并且随后在阶段402a中完成离线处理。
接着在阶段403中,初始超声扫描反射数据经过现有技术中已知并接受的低分辨率掩模检测来识别在固定扫描区域下面的至少一个或更多个潜在的感兴趣的血管,例如包括但不限于主动脉、肺动脉等血管。如果识别出多于一个感兴趣的血管,则然后该方法针对仅一个这样的血管继续,而轮流,可选地,顺次或以分层的方式或类似的分级方式对剩余的所识别的血管进行处理。
说明性地,在阶段403中利用低分辨率掩模检测以优化利用探头110的多个超声换能器来执行扫描所花费的时间。
在说明性实施方式中,利用多换能器探头110可用的超声换能器的每个来执行低分辨率掩模检测。例如包括4个超声换能器的可选探头110将利用4个超声换能器的每个来执行阶段401和阶段403的扫描和低分辨率掩模检测。例如包括至少两个或更多个超声换能器(例如(n)超声换能器)的可选探头110将利用该(n)超声换能器的每个来执行阶段401和403的扫描和低分辨率掩模检测。
根据可选血管特性和标准(例如包括但不限于血管尺寸、血管直径、通过血管的流体动力、换能器和血管之间所形成的角度等)来识别第一感兴趣的血管。例如,感兴趣的血管可以是大血管(例如主动脉和/或肺动脉),使得基于至少大约12mm并且可选地从大约12mm(毫米)到大约42mm(毫米)的直径来识别。
接着,在图4B中示意性地示出的阶段404中,低分辨率掩模之后,系统100识别和/或以其他方式确定来自用于最优血管标准的多换能器探头的多个(n)超声换能器的子集(n-x)。可选地,在不将超声图像呈现给系统操作员的情况下,自动且自主地提供阶段404。血管标准可以包括血管尺寸(例如直径)。更特别地,考虑具有12mm或更大的直径的血管。
例如,利用探头110的系统100包括至少两个或更多个(n)超声换能器,例如8个超声换能器,它们可以识别所述至少两个或更多个根据血管标准来提供数据的血管换能器的子集(n-x),例如3个或4个换能器。例如可以依据所识别的直径(例如至少12mm的直径)的血管直径来选择所选择的超声换能器的子集。
图4C提供了阶段404和阶段405的示意性非限制示出,当选择了超声换能器(n-x)的子集并且探头110仅利用所确定的超声换能器(n-x)的子集来重新扫描固定扫描区域时结束。
可选地,系统100用于通过瞄准所识别的感兴趣的血管在子集重新扫描期间节省时间和计算资源二者。可选地,控制探头110的扫描引擎120通过控制单独的超声扫描线来提供附加的控制。
更特别地,在低分辨率掩模检测期间,识别感兴趣的血管的边缘以允许扫描引擎120基于具有至少约16mm(毫米)的直径的所检测的血管的尺寸来确定哪个超声换能器提供了相关数据。可选地,利用血管边缘的识别,扫描引擎120利用在所识别的换能器的子集的附近的超声扫描线激活和/或生成超声信号以聚焦有关血管边缘的扫描区域。
例如,初始地经由探头110利用大约128或更多个扫描线的扫描引擎120,基于具有至少12mm的直径的血管的尺寸来识别感兴趣的血管位于超声扫描线之间。或者,扫描引擎120可以经由探头110来利用15-92扫描线。这些15-92扫描线因此被识别为包括感兴趣的血管的边缘。因此,通过利用超声换能器的子集进行重新扫描时,扫描引擎120激活和/或利用这些15-92扫描线附近的超声扫描线例如7-100超声扫描线以包括感兴趣的血管并且说明由于血液流动、拉伸、呼吸等的血管移动,而可选地,同时节省了后续扫描和分析期间的资源。
接着,在阶段403的掩模检测之后并且可选地与阶段404同时,可选地执行阶段407以助于感兴趣的血管的识别,如果探头110包括至少一个或更多个红外(本文称为“IR”)传感器。说明性地,探头110可以设置至少一个或更多个IR传感器以用于并且确定血液饱和度以便于识别至少一个或更多个感兴趣的血管。例如,如果由本公开的系统和方法所利用的血管特性和/或标准包括血液饱和度,则可以结合超声探头来利用IR传感器。
接着在图4C中示意性示出的阶段405中,利用子集数的超声换能器(n-x)(例如(n)换能器的n-x换能器)对固定扫描区域进行重新扫描之后,进行高分辨率掩模检测以重新估计、选择、确定和/或以其他方式识别最优换能器(z)。基于参数(例如包括但不限于与感兴趣的血管所形成的角度)从探头110的多个(n)超声换能器来选择最优换能器(z)。可选地,基于换能器与血管达到60度的角度并且更具体地大约45度的角度来选择最优换能器(z)。
例如,可以依据针对具有至少12mm或更多的直径的感兴趣的血管所形成的角度来选择最优超声换能器(z)。可选地,可以基于换能器与血管的角度达到60度并且更特别地大约45度的角度来选择最优换能器(z)。例如,利用包括(n)超声换能器的探头110的系统100识别(n-x)换能器的子集,其中,换能器与固定扫描区域下面的血管形成大约55度的角度,第二换能器形成大约25度的角度,并且第三换能器形成大约40度的角度。
接着在阶段406中,一旦在阶段405中从多个换能器(n,n-x)确定了最优换能器(z),则利用最优换能器来生成有关固定扫描区域的多普勒超声信号,其在图6中更详细地示出。可选地,多普勒信号可以产生可以呈现给系统操作员的图像,然而,系统100可以在没有系统管理员干预的情况下自主地操作,因此系统100可以在不生成或产生固定扫描区域的图像的情况下进行操作。
类似于图4A中所示出的,图4B示出了根据本公开的可选实施方式的可选方法的流程图,然而,所执行的方法使得可以在不执行阶段404和阶段405的情况下识别最优换能器。图4B的方法从而利用单个扫描掩模,可选地使用低分辨率扫描掩模,中分辨率扫描掩模以及高分辨率扫描掩模来识别最优换能器(z)。根据图4B的方法在不对换能器(n-x)的子集进行重新扫描(如图4A中所示)的情况下减少了确定最优换能器(z)所需的扫描的次数。
图5A示出了根据本公开的用于确定固定扫描区域内的感兴趣的血管(v)的中心的方法的流程图。在固定扫描区域的超声扫描期间所识别的血管(图4)产生椭圆形血管表面,然而以便于确定与感兴趣的血管的相关联的心脏和/或血液动力学参数,椭圆形血管表面必须转换成管状表面以识别感兴趣的血管(v)的轮廓,其之后将用于确定血液动力学和/或心脏参数,其中可以确定感兴趣的血管的中心(vc)和半径(vr)。图5A中所示出的各个阶段在图5B中示意性的示出。
用于将利用超声探头110感测到的椭圆形血管表面转换成管状血管表面的方法始于步骤501,其中利用布置在探头110中的超声元件感测到的,对应于来自固定扫描区域内的感兴趣的血管的超声反射的超声反射信号被转换成对应于来自血管表面的超声反射的多个点。
接着在阶段502中,对应于感兴趣的血管的表面的多个点经过扫描转换,如在图4A中的阶段403中的低分辨率掩模检测或在图4A中的阶段406中的高分辨率扫描转换。在掩模检测期间点被绘制在两个轴上。
接着在阶段503中,所有点被限制在两个轴附近的四边形内,其中该形成的四边形结构容纳和/或包围感兴趣的血管的表面。
接着在阶段504中,通过从四边形角的每个角投射至少两个对角线来识别四边形中心的坐标,其中将中心确定为对角线相交的点。
接着在阶段505中,利用四边形中心(vc)来投射多条弦,可选地,每0.25度投射一条弦以产生四边形中心(vc)附近的1440条弦以与感兴趣的血管(v)表面相交。可选地,可以以至少每0.25或更大的度数来投射多条弦,以产生最多达1440条的弦。
接着在阶段506中,选择与对应于血管表面(来自阶段501)的反射坐标相交的所投射的弦(来自阶段505)的子集。在弦的子集中,利用所投射的最小的弦来确定感兴趣的血管的半径(vr)。可选地,利用半径和中心坐标来将椭圆形表面转换成管状表面。
最后,在阶段407,基于中心(vc)和半径(vr),利用坐标对与血管表面相交的所投射的弦有关的数据进行制表以创建包括中心坐标、半径以及弦与半径比率的转换表格。可选地,表格还可以包括换能器数目、中心扫描线数目、起始扫描线、结尾扫描线数目、角度和深度。可以利用转换表格来利用极点转换识别感兴趣的血管。
可选地,如针对图5A的流程图所示出和描述的血管中心(vc)和血管半径(vr)的确定可以基于从探头110的(n)超声换能器114的每个所获得的数据,基于从至少换能器(n-x)的子集所获得的数据,并且基于来自至少最优换能器(z)的数据。
图6A是根据本公开的示出了使用多普勒超声以确定感兴趣的血管的血流速度的示例性方法。如之前在图4A中所描述的,在阶段406中,如图5A中所描述的,在一系列超声信号之后以及在确定感兴趣的血管的中心和半径之后,利用多普勒超声信号。
用于确定通过感兴趣的血管的血流向量的方法始于阶段601,其中如图4A-4B中所描述的,识别和瞄准了在固定扫描区域下感兴趣的血管。接着,在阶段602中,并且如图5A中所描述的,基于超声反射信号来识别感兴趣的血管的中心和半径。接着在图6B中示意性示出的阶段603中,可选地对在如图4A中所描述的阶段406中所识别的探头110的最优换能器(z)进行激活以通过瞄准至少一个或更多个感兴趣的血管来在固定扫描区域上产生多普勒超声信号。可以对最优换能器进行激活,使得其瞄准至少一个或更多个感兴趣的血管的中心。如图5A的阶段504中的所识别的,通过扫描引擎瞄准至少一个或更多个感兴趣的血管的中心以选择性地激活包围感兴趣的血管的中心的多个多普勒超声扫描线。多普勒超声扫描线通过激活多个侧翼多普勒超声扫描线来瞄准感兴趣的血管的中心。可选地,侧翼多普勒超声扫描线(fdsl)均匀地位于血管中心每一侧的侧边。可选地,被激活的侧翼扫描线的数目可以是受检者的数据和/或血管属性(例如包括但不限于直径、脉搏、受检者年龄等)的函数。可选地,如图6B中所示,所激活的扫描线(fdsl)的数目和位置可以是通过血管中心或血管表面的弧长或弦长(cl)的函数。可选地,可以将与中心或血管表面相关联的弦长或弧长(cl)预定例如从大约0.3mm到大约1.5mm,并且更特别地,1mm(毫米)或可选地,所述与中心或血管表面相关联的弦长或弧长(cl)可以为半径等血管属性或受检者参数的函数。
例如,具有17mm的直径的血管可以产生包括通过中心的一个多普勒扫描线(dsl)和在中心的任一侧的4个侧翼多普勒扫描线(fdsl)的9个侧翼多普勒扫描线,使得通过1mm的弦长(cl)将扫描线分隔开。
例如,可以利用至少2个或更多个说明性地7个,多普勒超声侧翼扫描线(fdsl)来位于血管中心(vc)的侧边,其中,例如对位于对应于血管中心(vc)的多普勒超声扫描线的每一侧的3个侧翼多普勒超声扫描线(fdsl)进行激活。这样的多普勒扫描方案因为选择性地激活超声换能器和元件所以在特定时间节省资源,并且另外用于实时计算限制。在血管中心两侧还用于当包围血管血流的中心时确保考虑到由于呼吸、拉伸等类似动作引起的血管运动。可选地,可以以彼此之间设定的间隔来生成每个侧翼扫描线(fdsl),使得第一个在t=0处发射,并且以设定的时间间隔t=x生成下一个fdsl。可选地,之间的侧翼扫描线时间间隔可以例如为从大约2ms(毫秒)达到大约15ms(毫秒),并且更特别地为大约2.5ms(毫秒)或者例如从大约2ms达到大约15ms(毫秒)的大约0.1ms(毫秒)的分辨率的任意时间间隔延迟。可选地,之间的侧翼扫描线时间可以是可控的,并且基于血管参数、用户参数、医生参数等来确定。
可选地,如图5A中的阶段506中所确定的,阶段603期间所生成的多普勒超声信号可以用于验证和确认利用超声扫描所确定的血管参数以再次确认利用超声扫描所确定的半径。
可选地,在阶段604中可以基于流过血管的血液的流体动力对感兴趣的血管(v)进行分类和/或识别。说明性地,也可以基于可选地在图4A-4B的阶段407中提供的IR饱和度数据识别感兴趣的血管。可选地,可以基于流过血管的血液的流体动力和/或IR饱和度数据中的一个或两个来识别感兴趣的血管(v)。例如,对应于血液层流(laminar blood flow)的流体动力的识别表示肺动脉。例如,对应于血液湍流的流体动力的识别是表示主动脉。利用对应于血流速度的流体动力来识别血管类型。可选地,血管类型的确定是基于阈值血流速度。可选地,阈值血流速度可以是大约60cm每秒(60cm/sec)。例如低于大约60cm/sec的阈值速度的血流将血管识别为肺动脉(PA)。例如,高于大约60cm/sec的阈值速度的血流将血管识别为主动脉(AO)。
接着在阶段605中,确定了在感兴趣的血管和超声换能器特别是最优换能器(z)之间所形成的角度。在本公开的一个实施方式中,基于与超声换能器所形成的角度从感兴趣的血管中选择待监测的一个血管。可选地,所形成的角度从大约20度到大约60度,并且更特别地基于形成最接近于45度的角的血管来选择所选择的血管。
接着在阶段606中,激活在单独的侧翼多普勒超声扫描线(fdsl)附近的多普勒超声,并且在例如对应于达到大约6s(六秒)的给定时间段内监测在阶段605中所确定的待监测的血管(v),以分配至少4个心动周期来用于测量多普勒超声心动图。这样的监测用于确定通过血管(v)的血流速度。
可选地,从包括多个侧翼扫描线(fdsl)的单独的多普勒扫描线(dsl)所获取的半径参数,与从阶段506的超声扫描所获取的半径相互对照。可选地,基于包括图6B中的多个侧翼多普勒扫描线(fdsl)的单独的多普勒扫描线(dsl)所获取和/或以其他方式确定的参数,可以用于与从单独的多普勒扫描线(dsl)所获取的血管参数相互对照并且验证。可选地,多普勒扫描线(dsl)验证表可以例如基于有关例如包括但不限于dsl长度、dsl角、血管半径、dsl角度、cl弦长距等的参数的三角测量计算来确定。可选地多普勒扫描线验证表用于验证血管半径。
接着在阶段607中,对包括每个具有时间戳的血管半径和血流速度的两个血管属性进行制表,并且将其存储在系统100。接着在阶段608中,所识别的三个血管属性利用系统管理处理器102经过进一步处理以确定多个心脏和/或血液动力学参数。
图7是根据本公开的可选实施方式的示例性方法的流程图,所述方法用于基于多普勒超声参数自动地确定血液动力学和/或心脏参数、定义用于如在本文中上面所描述和示出的多普勒超声参数和在固定扫描区域内所识别和/或所测量的血管参数的进一步处理。该方法始于阶段700,其中对速度时间曲线数据进行制表并且可选地将其如图8中示意性示出的以多普勒血液速度(s=米每秒)与时间曲线(t=秒)的形式所绘制的曲线(图8的800)的形式呈现。基于在如图6A中所示出和描述的阶段606和607中所测量、制表和/或以其他方式所提供的数据可选地执行阶段700。可选地,所呈现的速度时间曲线数据对应于至少四个或更多个心动周期,或者,至少三个或更多个心动周期。
可选地,可以手动地和/或自动地和/或半自动地或以它们的任意组合来执行其阶段的任一个或更多个阶段中的方法。可选地,可以由用户(例如包括但不限于受检者、护理者、医生、技术员等受训的个人)来执行所描述的方法。可以在没有用户干预的情况下利用100和利用系统管理处理器102来自动且自主地执行该扫描。可选地,可以利用远程系统例如包括但不限于决策支持系统120来提供该方法的手动和/或自动执行。医疗决策支持系统120可以例如以后勤和/或呼叫中心和/或保健员和/或门诊流动护理和/或远程医疗中心和/或医疗决策支持系统和/或护理者决策支持系统的形式来设置。
接着,在阶段702中,通过从至少三个或更多个连续的心动周期中识别和/或确定在阶段606中所测量的至少一个或更多个单独的心动周期来开始速度-时间曲线数据的处理。在图8中示意性示出了示例性的速度-时间曲线800,其示出了从点804a到点804d的心动周期,可选地定义了有关速度-时间曲线800的舒张点。
接着在阶段704中,如图8中所示出的,将对应于在阶段702中识别的单独的心动周期的速度-时间曲线数据分割成在可用的心动周期的每个心动周期内识别的多个心动周期段802。可选地,可以识别至少一个或更多个心动周期段802a、b。说明性地,在每个可用的心动周期数据内识别至少两个心动周期段,例如在图8中所示出的对应于脉压的心动周期段802a和对应于压降的心动周期段802b。
可选地,可以由用户(例如包括但不限于受检者、医生、受训的技工等)手动地执行心动周期分段。可选地,可以基于参数例如系统100相关参数、不依赖于系统100的参数、利用系统100所测量的参数、外部参数和/或可控的参数或它们的任意组合来对所识别的心动周期段的数目和/或心动周期分段分辨率进行控制。
可选地,基于已知的心动周期界标(例如包括但不限于舒张、收缩、等容收缩、等容舒张、A-V瓣膜闭合、主动脉瓣打开、喷射、A-V瓣膜打开等)来执行分段。
在替代实施方式中,可以通过速度-时间曲线的数学计算来识别有关曲线和/或所制表的数据内的极值,而自动地执行心动周期分段和心动界标识别。速度-时间曲线极值可以例如包括但不限于识别最大值、最小值、局部最大值、局部最小值、绝对最大值、绝对最小值、拐点、梯度、坡度、上确界、下确界等。这样的极值点804a-d的示例在图8中示意性示出。例如,点804a示意性示出了对应于心动周期的起始和与舒张相关联的点,而点804d对应于心动周期的结束,也与舒张相关联;在心动周期期间,点804b可选地对应于速度最大值以及脉压802a的结束,点804c对应于压降段802b期间的拐点。
接着在阶段706中,如图8中的子段806中示意性示出的,进一步将单独的心动周期段细划分为多个(i)子段。可选地,分辨率和/或子段的数目可以是常数、基于时间的和/或基于速度-时间曲线的分辨率的、用户定义的等。
接着,在阶段708期间的分段和细分段之后,如在本文中上面所描述的,确定和/或以其他方式计算多个血管相关联的参数,其可选地基于利用本公开的系统100所测量和/或以其他方式确定的血管参数、多普勒血流参数。可选地,如以下图9中所示出的,所确定的参数可以例如包括但不限于面积、速度-时间曲线下的面积、心动周期段的面积、心动周期子段的面积、血管体积、血流量、血流加速、力和压力。
接着在阶段710中,基于在阶段708中所确定和/或以其他方式识别的参数(可以例如包括但不限于每搏输出量、每搏输出量指数、心率、心输出量、心脏指数、收缩压、舒张压、平均动脉压、心脏动力、心脏指数、每搏输出量的变化、总外周阻力等)来确定血液动力学和心脏参数。
示例1:确定主动脉中的舒张压
前面的示例仅用于说明性的目的,并且不将本申请限制到如描述所提出的描述或计算。
可以例如基于受检者的上躯干附近的固定区域(例如,如在本文上面图1-8中所示出和描述的,受检者的胸部附近的固定扫描区域)的超声和多普勒扫描的组合以非侵入方式确定主动脉的舒张压。可选地,对于利用在固定扫描区域附近瞄准至少一个感兴趣的血管例如主动脉或肺动脉进行多普勒超声所测量的单独的心动周期来执行以下确定。
在阶段900中,基于根据以上所描述的方法所确定的血管半径,并且基于下面的等式1来对于每个子段806(i)确定血管的截面积:
EQ1.Ai=πri 2
接着在阶段902中,根据下面的等式2,至少一个,并且更特别地,多个子段(i)(例如图8的806)的面积,从图8的速度-时间曲线800来确定或者从对应的制表的数据来确定。对于连续曲线800来确定每个子段806的子段面积;其中说明全时间范围的是多普勒扫描测量。
EQ2.
接着,在阶段904中,根据等式3确定每子段(i)806的血容量。
EQ3.Vol(i)=A段(i)·Ai
接着,在阶段906中,基于等式3中所确定的容量和常量密度(ρ)来确定每子段(i)806的血液质量。
EQ4.mi=Vol(i)·ρ
接着,在阶段906中,基于在等式5中确定的曲线800来确定每子段(i)806的血液加速度。
EQ5.
接着,在阶段910中,基于等式6来确定每子段(i)806的力。
EQ6.Fi=mi·αi
接着,在阶段912中,基于等式7来确定每子段(i)806的压力。
EQ7.
接着,在阶段914中,对于每个段来确定段压力(802a、b),段压力(802a、b)分别说明脉压(Ppulse)段802a和压降(Pdrop)段802b的压力,并且在心动周期期间所承受的总压力(Psystole)从点804a到点804d来定义。例如通过等式8所示出的,通过对相关且单独的子段806求和来确定总压力和段压力。可选地,总压力相当于利用根据本公开的可选实施方式的固定扫描的多普勒超声扫描所测量的单独的心动周期的收缩压(Psystole)。可选地,可以通过对脉压(Ppulse)和压降(Pdrop)求和来确定总压力。
接着,在阶段916中,根据下面的等式9利用在阶段914中确定测量的血管的段压力来确定在所测量的感兴趣的血管(v)中承受的舒张压。
EQ9.Psystole-Ppulse=Pdiastole
现在参照图10-12,描述用于基于使用超声和多普勒扫描的组合的固定扫描来确定血液动力学和心脏参数的本公开的优选的实施方式。
图10示出了描述根据本公开的可选方法的流程图,所述方法用于识别感兴趣的血管并且获取与所述血管相关联以用于进一步处理的心脏参数以确定心脏和血液动力学参数。
首先在阶段1001中,在固定扫描区域内通过(例如之前针对图4详细描述的)初始的超声扫描自动且自主地识别多个扫描的对象。接着在阶段1002中,执行掩模检测和滤波以从多个所扫描对象内识别感兴趣血管的第一潜在集。可选地且优选地,滤波处理可以例如包括至少一个以及更多个优选的从包括但不限于矩形掩模滤波、边缘检测、边界估计、对象形状和/或尺寸阈值等单独或它们的任意组合的组中所选择的多个滤波器。可选地,边缘检测可以例如以索贝尔边缘检测的形式来提供。可选地,可以利用多边形填充来提供边界估计。可选地,对象尺寸阈值可以例如包括基于尺寸估计去除太小的对象,形状估计例如去除不是椭圆形或圆形的对象,或它们的任意组合。
接着在阶段1003,阶段1002中所识别的经滤波的血管对象(最优选地以椭圆形、椭球性或圈等圆形封闭结构的形式),经过变换(例如包括但不限于霍夫变换)以进一步识别感兴趣的血管(例如包括但不限于主动脉和肺动脉)。可接受的用于使用的一个变换是随机霍夫变换(本文称为“RHT”),以识别与所识别的血管对象相关联的参数。在一个实施方式中,针对椭圆形执行RHT,假定在阶段1002中所识别的任意感兴趣的血管将具有椭圆形轮廓。利用RHT提供直接和/或间接识别和/或推断与血管相关联的多个参数(例如包括但不限于椭圆中心、长轴以及短轴以及扫描角度)。例如在图12A-12B中所示出的,示出了轴以及椭圆边界点。
接着在阶段1004中,利用RHT参数来针对血管的子集进行滤波以进行进一步扫描来识别从主动脉(AO)和/或肺动脉(PA)所选择的感兴趣的血管。滤波标准可以包括从大约20度到60度的扫描角度以及至少16mm并达到40mm(毫米)的短轴。可选地,感兴趣的血管的直径与从RHT处理确定的短轴的函数相关联和/或以其他方式关联为短轴的函数,。可选地,感兴趣的血管的直径可以与从RHT处理确定的长轴的函数相关联和/或以其他方式关联为长轴的函数。可选地,感兴趣的血管的直径与从RHT处理确定的长轴和短轴的函数相关联和/或以其他方式关联为长轴或短轴的函数。
接着在阶段1005中,执行进一步的滤波处理以通过利用多普勒扫描识别从主动脉(AO)或肺动脉(PA)所选择的至少一个感兴趣的血管,以确定通过感兴趣的血管的血流速度。将至少一个或更多个扫描线指向在阶段1003中通过RHT所识别的对于在阶段1004中识别和滤波的血管子集的血管中心。多普勒扫描用于确定通过感兴趣的血管的血流速度,最优选地在其中心附近。可选地,从大约1秒到大约3秒执行多普勒扫描,并且最优选地每个所识别的感兴趣的血管为1.5秒。可选地,针对至少一个完整的心动周期来执行多普勒扫描,优选地在心动周期期间映射血流速度波动。可选地并且优选地,多普勒扫描提供以扫描和测量在至少一个心动周期期间发生的通过血管中心的最大血流速度。
最后,在阶段1006中,通过选择关于与感兴趣的血管相关联的至少一个阈值(例如包括但不限于血管血流速度和/或血管直径等或它们的任意组合)的血管来识别至少一个或更多个感兴趣的血管。可选地,可以基于用户参数和/或受检者参数和/或护理者和/或系统参数来确定阈值。可选地,可以基于至少一个或更多个参数(例如包括但不限于健康状况、医疗史、年龄、医疗条件、心脏病史、解剖参数、动脉粥样硬化参数、它们的任意组合等)来确定阈值。
可选地,血流速度阈值可以为大约0.6m/sec,并且可以表示正在扫描的血管的类型。可选地,基于在0.6m/sec的可选阈值以上的血流速度阈值来选择主动脉的监测,或者当具有低于0.6m/sec的阈值的血流速度时选择肺动脉。可选地,血管直径阈值可以例如为从大约16mm到大约40mm。
图11示出了用于连续地监测根据本公开的可选实施方式(例如图10中所描述的方法)所选择和识别的感兴趣的血管的血管参数的方法的本公开的可选实施方式。通过识别通过如在图10中的阶段1003中所预先描述的RHT变换所确定的血管属性,该方法始于阶段1100并且在图12A中示意性地示出。
接着在阶段1101中,例如在图12A-B中所示出的,通过假定血管由椭圆表示来分析单独的血管,对(例如在图10的阶段1006中所识别的)至少一个或更多个感兴趣的血管进行处理。血管边界1200b,从RHT处理所获取的数据点,例如包括但不限于上、下、左、右边界坐标,被依次进行识别和处理。将超声扫描线依次瞄准每个坐标1200b,其中每个坐标1200b由多个侧翼扫描进行侧翼扫描,例如7个超声扫描线(usl)指向每个边界1200b(图12B),其包括利用之前扫描所计算的坐标的一个扫描线以及在中心扫描线的每一侧的侧面的大约三个侧翼扫描线瞄准坐标,使得大约七个超声扫描线以每个边界点1200b为中心。侧翼扫描线用于识别在心动周期的阶段随时间变化的血管坐标的移动、扩展、形变以及改变。以每10毫秒一次确定大约6秒的在边界1200b处的血管超声数据,以提供至少三个或更多个连续心动周期的数据。
接着在阶段1102中,如图12A-B中所示出的,RHT识别的血管中心1200c类似地用多普勒扫描线(dsl)跟踪。在一个实施方式中,以每10ms一次确定大约6秒的血管超声数据,以提供用于识别至少三个或更多个连续心动周期的数据。
接着在阶段1103中,利用每10ms提供数据的时间戳对与经由超声边界1200b扫描的血管尺寸和经由血管中心1200c的多普勒扫描的血流速度有关的数据进行制表。在一个实施方式中,在阶段1104中,然后对制表的数据进行处理以进一步识别血液动力学和心脏参数(例如包括但不限于舒张压、收缩压、脉压等)。可选地,如在图7-9和图13-15中所示出的本公开的可选实施方式所教示的,提供进一步处理。
接着在阶段1105和1106中,然后对在前一阶段1101和1102中所提供的超声和多普勒数据进行进一步处理以跟踪感兴趣的血管以说明血管运动、形变等。特别地,在阶段1105中,将至少一个或更多个滤波器应用到超声数据和多普勒数据,例如在图10中所描述的,以最优选地包括噪声监测、掩模以及边缘检测例如以提供固定扫描区域内的感兴趣的血管的最新的准确图像和位置。
在阶段1106中,然后利用RHT进一步处理经滤波的数据,例如重新定义图12A-B中所示出的中心1200c和边界1200b的位置,以重新分析和识别血管参数(例如包括但不限于血管中心、经由椭圆短轴的血管直径、经由长轴的边界以及扫描角度)。然后优选地在下面的血管扫描(最优选地在初始扫描之后的10ms)中利用所更新的血管RHT参数,其中最优选地大约每10ms更新阶段1300的RHT数据。
现在参照图13和图14,描述本公开的可选实施方式,该可选实施方式提供了用于非侵入性地确定心脏参数的方法,以及特别地提供了用于非侵入性地确定优选地至少一个或更多个多个心动周期参数(例如包括但不限于收缩压(本文中称为“Psys”)、舒张压(本文称为“Pdia”)以及脉压(本文称为“Ppluse”和/或“PP”))的方法。
图13示出了用于基于例如在图4-6和/或图10-12中所述而测量的定义血流速度和血管半径的数据来确定心脏和/或血液动力学参数的根据本公开的可选实施方式。用于对血管半径以及血流速度进行进一步处理的根据本公开的可选实施方式的方法包括,第一阶段1301,提供例如之前在图4-6和/或图10-12中所描述的至少三个或更多个连续心动周期的多个测量,其中可选地且优选地在大约6秒内每10毫秒(ms)一次来计算该测量,并且对包括血管半径、通过血管的血流速度的结果进行制表。
例如在图14中示意性地示出的,阶段1302,将血管半径作为时间的函数进行绘制。在一个实施方式中,将最大/峰值半径与收缩半径Psys的函数相关联和/或以其他方式作为收缩半径Psys的函数,舒张半径Rdia与最小半径的函数相关联和/或以其他方式作为最小半径的函数。
阶段1303,线1400从最大半径(如图14中所示的Rsys)外延,通过最小半径(Rdia)直到线1400与时间线相交,定义将与时间线相交的点用于估计如图14中所示的虚拟半径RP7,血管半径RP7对应于理想的血管半径RP7,其中压力为最小并且相当于大约2mmHg到大约10mmHg并且最优选地为7mmHg。
接着在阶段1304中,利用外延线1400确定与所定义的脉压相关的第一三角形(Rsys,Rdia,1402),其中斜边对应于收缩半径(Rsys)和舒张半径(Rdia)之间的斜线;并且定义所定义的第二三角形(Rsys,RP7,1404),其中,斜边对应于收缩半径(Rsys)到最低压力(RP7)处的理想半径之间的斜线。
阶段1305确定两个三角形的基,其中tpp基于第一三角形的基线并且tsys与第二三角形有关。
接着在阶段1306中,例如图8中所描述的,如之前所描述的通过可选地确定血流速度与时间的图的曲线的能量和/或该曲线下的面积来确定脉压(Ppluse)即段802a。
接着在阶段1307中,如以上阶段1305和阶段1306所计算的,估计脉压和收缩压与脉压时间和收缩压时间之间相关联的比率,以确定收缩压并且通过以下等式10(EQ10)给出:
最优选地,从阶段1305的第一三角形和第二三角形提供tsys和tpp,而在阶段1306中提供脉压,以确定:
最后,在阶段1308中,基于等式Pdia=Psys-Ppulse从Psys以及Ppulse数据计算Pdia。
现在参照图15,描述本公开的可选实施方式,所述实施方式提供了用于非侵入性地确定心脏参数的方法,并且特别地用于非侵入性地确定优选地至少一个或更多个多个心动周期参数(例如包括但不限于收缩压(本文中称为“Psys”)、舒张压(本文称为“Pdia”)以及脉压(本文称为“Ppulse”和/或“PP”))的方法。在一个实施方式中,如通过图4-6和/或图10-12中所描述的本公开的示例性实施方式所提供的,通过与有关血管半径、血流速度以及时间戳的多个测量结合使用多个等式(例如包括但不限于莫恩思-柯特维格(Moens-Korteweg)等式、欧拉等式以及所生成的胡克弹性定律中的至少一个或更多个和/或其组合)来确定Psys、Pdia、Ppulse。可选地,如根据本公开的图1-3所描述的,可以利用根据本公开的示例性实施方式的超声和多普勒扫描装置来提供血管半径、血流速度和时间戳。可选地,可以通过外部和/或辅助装置来提供血管半径以及具有时间戳的血流速度。
图15示出了用于基于定义血流速度和血管半径的所测量的数据(例如在图4-6或图10-12中所描述的)来确定心脏和/或血液动力学参数的根据本公开的可选实施方式。根据本公开的方法包括第一阶段1501,所述第一阶段1501提供了至少三个或更多个连续的心动周期的多个测量,其中可选地,例如在图4-6和/或图10-12中所描述的,大约6秒每10毫秒一次计算该测量,并且对包括时间戳、血管半径、通过血管的血流速度的结果进行制表。
接着在阶段1502中,对制表的数据进行绘图以示出随着时间变化的血管半径的演变以及可选地示出随着时间变化的血流速度的演变。
接着在阶段1503中,阶段1501中所提供的数据用于估计多个血管关联的等式,例如包括但不限于莫恩思-柯特维格等式、欧拉等式以及所生成的胡克弹性定律。最优选地,组合的专用等式如下:
接着在阶段1504中,使用所测量的数据(例如在图1-12中所描述的,由本公开的可选实施方式的装置、系统以及方法所提供),利用最优选地以大约每10毫秒(10ms)一次提供至少6秒以说明至少三个或更多个连续心动周期的血流速度(Ui,Ud,Us)和半径(Rd,Rs,Ri)来估计以上等式,并且然后使用最小二乘法利用所得的多个等式来估计k、λ、Rvir。
接着在阶段1505中,根据在阶段1501中所确定的下面的等式并基于多个血管关联等式,利用所估计的包括k、λ、Rvir的参数来评价和/或计算Psys,Pdia,Ppulse。
尽管已经针对有限数目的实施方式描述了本公开的实施方式,但是要理解的是,可以做出其他实施方式的许多变型、修改以及应用。
Claims (50)
1.一种用于自动且自主地确定至少一个心脏和血液动力学参数的非侵入性超声系统,所述系统配置成将扫描区域的图像呈现给用户,并且其中所述扫描区域是所述用户的胸部上的固定区域,所述系统包括:
a.超声探头,所述超声探头包括用于扫描所述胸部上的所述固定区域的多个超声换能器;
b.探头扫描引擎,所述探头扫描引擎用于控制所述多个超声换能器并且用于处理从所述超声换能器获得的数据以产生一组血管参数;以及
c.处理器,所述处理器用于根据所述血管参数来确定至少一个心脏和血液动力学参数。
2.根据权利要求1所述的系统,其中所述血管参数包括血管半径和血管血液速度,每个参数附有时间戳。
3.根据权利要求2所述的系统,其中所述至少一个心脏和血液动力学参数选自包括压力、动压、静压、总压、心输出量、速度、内部血管直径、脉搏、每搏输出量以及每搏输出量衍生物的组。
4.根据权利要求1所述的系统,其中所述血管参数是针对肺动脉和主动脉提供的。
5.根据权利要求1所述的系统,其中所述血管参数是针对肺动脉干和升主动脉提供的。
6.根据权利要求1所述的系统,其中所述多个超声换能器被布置成为扫描所述胸部上的固定区域而优化的阵列。
7.根据权利要求6所述的系统,其中所述超声换能器阵列包括八个超声换能器。
8.根据权利要求7所述的系统,其中所述八个超声换能器被布置成使得:六个外部换能器布置成具有六个顶点的六角形结构,并且两个内部换能器布置在所述六角形结构的内部并且跨着在所述六个顶点之间限定的两条弦。
9.根据权利要求8所述的系统,其中所述两个内部换能器被布置成使得:
a.第一内部换能器布置在第一对连续的六角形顶点附近放置的两个外部换能器之间;以及
b.第二内部换能器布置在第二对连续的六角形顶点附近放置的两个外部换能器之间,其中所述第一对连续的六角形顶点和所述第二对连续的六角形顶点彼此连续。
10.根据权利要求1所述的系统,其中所述探头扫描引擎包括用于协调和控制所述多个超声换能器的复用器。
11.根据权利要求10所述的系统,其中所述探头扫描引擎还包括用于控制所述复用器的处理器模块。
12.根据权利要求1所述的系统,其中所述处理器还包括用于显示所述至少一个心脏和血液动力学参数的用户接口。
13.根据权利要求23所述的系统,其中所述用户接口不呈现所述固定扫描区域的视觉图像。
14.根据权利要求1所述的系统,还包括通信模块,所述通信模块与所述处理器协作以将所述至少一个心脏和血液动力学参数发送到较高级处理中心和决策支持系统之一。
15.根据权利要求1所述的系统,还包括决策支持系统,所述决策支持系统用于监测和估计所述至少一个心脏和血液动力学参数。
16.根据权利要求1所述的系统,所述系统适于独立家庭使用。
17.根据权利要求16所述的系统,其中所述处理器选自包括智能电话、移动电话、PDA、微型计算机、个人计算机以及便携式通信装置的组。
18.一种用于在不将扫描区域的图像呈现给用户的情况下自动且自主地确定心脏参数的非侵入性超声探头,其中所述扫描区域是所述用户的胸部上的固定区域,所述探头包括包含用于扫描所述胸部上的所述固定区域的多个超声换能器的单个壳体。
19.根据权利要求18所述的探头,其中所述单个壳体还包括用于协调和控制所述多个超声换能器的扫描引擎。
20.根据权利要求19所述的探头,其中所述扫描引擎包括用于协调和控制所述多个超声换能器的复用器。
21.根据权利要求20所述的探头,其中所述扫描引擎还包括用于控制所述复用器的控制器模块。
22.根据权利要求21所述的探头,其中所述控制器模块包括至少三个处理器,所述至少三个处理器包括用于将信号发送到所述复用器的第一处理器、用于从所述复用器接收信号的第二处理器、以及用于在所述第一处理器和所述第二处理器之间进行总体控制和整合的第三处理器。
23.根据权利要求18所述的探头,其中所述多个超声换能器形成包括八个超声换能器的阵列。
24.根据权利要求23所述的探头,其中所述八个超声换能器的阵列被布置成使得:
a.六个外部换能器布置成具有六个六角形顶点的六角形结构;以及
b.两个内部换能器沿着所述六角形顶点之间的两个对角线布置。
25.根据权利要求18所述的探头,其中所述固定区域包括与所述探头的扫描表面的形状基本相同的形状。
26.根据权利要求18所述的探头,其中所述换能器中的每个换能器包括用于生成脉动信号、相控阵列信号以及线性超声信号中的至少一个的至少32个压电晶体。
27.一种用于基于受检者的胸部上的固定扫描区域的超声扫描来自动且自主地确定所述受检者的至少一个心脏和血液动力学参数的非侵入性方法,其中在不将所述固定扫描区域的超声图像呈现给用户、从业医师以及护理者中的至少一个的情况下执行所述扫描,所述方法包括以下步骤:
a.利用包括多个超声换能器的阵列的超声探头对所述受检者的胸部上的固定扫描区域进行扫描;
b.自主地确定所述固定扫描区域内的至少两个血管的至少两个血管参数;以及
c.对所述两个血管中的至少一个血管的所述至少两个血管参数进行处理以确定所述受检者的所述至少一个心脏和血液动力学参数。
28.根据权利要求27所述的方法,其中所述扫描步骤还包括将所述超声探头放置在所述受检者的胸部上并且将所述探头保持在固定位置以便于连续地扫描所述固定扫描区域。
29.根据权利要求27所述的方法,其中所述确定所述至少两个血管参数的步骤还包括:
a.通过自动且自主的方式利用所述超声换能器的阵列来识别所述固定扫描区域内的两个血管;
b.基于所述超声扫描来确定所述两个血管中的每个血管的中心和直径;
c.在所述扫描区域内激活多普勒超声信号并且在所述识别的两个血管的中心附近瞄准所述识别的两个血管;
d.监测所述两个血管中的每个血管内的流动流体的多个多普勒流参数一定时间段;以及
e.对所述多普勒流参数和血管参数进行处理以识别心脏和血液动力学参数。
30.根据权利要求29所述的方法,其中所述时间段相当于至少四个心动周期或至少三个连续的心动周期。
31.根据权利要求29所述的方法,其中所述两个血管为主动脉和肺动脉。
32.根据权利要求29所述的方法,其中所述两个血管是升动脉和肺动脉干。
33.根据权利要求29所述的方法,其中所述处理步骤还包括单独地处理所述两个血管中的每个血管以基于所述超声扫描自主地确定所述两个血管中的每个血管的中心和直径。
34.根据权利要求33所述的方法,还包括以下步骤:
a.获得与检测到的并且被配置成从所述超声换能器的阵列接收的多个超声信号相对应的点集,其中所述点对应于所述血管中的至少一个血管的表面附近的位置;
b.将所述点布置在至少两个轴上;
c.将全部的所述点限制在两个轴附近的四边形内;
d.确定所述四边形的中心;
e.从所述四边形中心投射与所述点相交的多条弦;
f.从投射的与所述点相交的所述多条弦中选择最小的弦;其中所述最小的弦限定所述血管的直径,并且其中所述四边形中心限定所述血管中心;以及
g.通过将所述点投射到由所述血管直径和所述血管中心限定的圆上,来转换所述点中的每个点。
35.根据权利要求34所述的方法,其中所述投射多条弦的步骤还包括:每0.25度投射一条弦以在所述四边形中心附近形成1440条弦。
36.根据权利要求27所述的方法,其中所述处理步骤还包括:
a.根据所述固定扫描区域的多普勒扫描来确定速度-时间曲线;
b.识别所述速度-时间曲线内的各个心动周期;
c.对所述速度-时间曲线进行分段以对应于多个心动周期并表示多个心动周期段;
d.沿所述心动周期段中的每个心动周期段设置多个子段;
e.基于所述子段来确定所述心动周期段的参数;以及
f.基于所述心动周期段参数来推断血液动力学和心脏参数。
37.根据权利要求36所述的方法,其中所述推断所述血液动力学和心脏参数的步骤还包括:
a.基于血管半径确定面积;
b.基于所述速度-时间曲线确定所述子段的面积;
c.确定子段的血容量;
d.基于所述子段的所述血容量确定血液质量;
e.确定所述子段的血流加速度;
f.确定所述子段的血流力;以及
g.基于所述血流力与所述血流加速度的比率确定所述速度-时间曲线的子段的压力。
38.根据权利要求27所述的方法,其中所述自主地确定所述固定扫描区域内的至少两个血管的至少两个血管参数的步骤包括:
a.执行掩模检测和滤波以识别所述固定扫描区域内所扫描的椭圆形对象;
b.针对椭圆执行随机霍夫变换(RHT)以识别与在所述扫描区域内所识别的对象相关联的RHT关联参数;
c.基于至少一个RHT关联参数执行进一步的滤波和限值;
d.将多普勒扫描激活至少一个心动周期以确定最大血流速度;
e.基于所述血流速度识别所述至少两个血管;以及
f.扫描并监测所述识别的两个血管以确定至少两个血管参数至少三个心动周期。
39.根据权利要求38所述的方法,其中所述RHT导出的参数选自包括长轴、短轴、中心、扫描角度以及它们的任意组合的组。
40.根据权利要求38所述的方法,其中对所述RHT导出的参数进行进一步处理以确定从包括上、下、左、右的组中选择的血管对象边界。
41.根据权利要求38所述的方法,其中所述识别所述固定扫描区域内的两个血管的步骤包括应用血管直径和血流速度的阈值。
42.根据权利要求38所述的方法,其中所述用于识别在所述固定扫描区域内所扫描的椭圆形对象的掩模检测和滤波选自包括矩形掩模滤波、边缘检测、边界估计、对象形状阈值、尺寸阈值或它们的任意组合的组。
43.根据权利要求38所述的方法,其中所述识别两个血管以确定所述两个血管中每个血管的至少两个血管参数的扫描步骤包括:
a.确定所述识别的血管的包括上边界、下边界、左边界、右边界以及血管中心的RHT导出参数;
b.利用多个超声扫描线在每个血管对所述血管边界—上边界、下边界、左边界、右边界—执行边界超声扫描一段时间以监测随着时间变化的血管的位置;
c.对所述RHT导出的血管中心执行多普勒扫描一段时间以确定随着时间变化的血流速度;
d.将包括血流速度和血管中心的所述至少两个血管参数以及时间戳制成表,以用于进一步处理;以及
e.对所述边界超声扫描数据执行随机霍夫变换(RHT)以监测随着时间变化的血管位置坐标。
44.根据权利要求43所述的方法,其中在RHT导出的边界为中心的每个边界处用7个扫描线来执行所述多个超声扫描线。
45.根据权利要求43所述的方法,其中所述时间段相当于至少三个心动周期。
46.根据权利要求43所述的方法,其中所述边界超声扫描时间或所述多普勒扫描时间为大约10毫秒。
47.根据权利要求27所述的方法,其中所述处理步骤用于处理包括随着时间变化的血管半径和血流速度的所述至少两个血管参数以确定所述受检者的至少一个心脏或血液动力学参数,所述方法包括:
a.绘制包括收缩半径(Rsys)点和舒张半径(Rdia)点的血管半径与时间的关系;
b.确定收缩半径(Rsys)点与舒张半径(Rdia)点之间的斜线;
c.外延所述斜线以识别RP7点,其中所述斜线与时间线轴相交;
d.从Rsys点延伸垂线以与时间线轴相交,以确定收缩时间间隔(tsys)和脉压时间间隔(tpp);
e.根据所述血流速度与时间图来计算脉压(Ppulse);
f.估计比率Tpp/Tsys=Ppulse/Psys来计算Psys;以及
g.通过估计Pdia=Psys-Ppulse来计算Pdia。
48.根据权利要求27所述的方法,其中所述处理步骤用于处理包括随着时间变化的血管半径和血流速度的所述至少两个血管参数,以确定所述受检者的心脏或血液动力学参数,所述方法包括:
a.对血管半径与时间关系进行绘图;
b.提供莫恩思-柯特维格等式、欧拉等式、弹性等式的组合来限定作为血管半径和血流速度的函数的压力;
c.利用包括在血管半径与时间图中所示出的血管半径和血流速度的多个测量数据来估计所述压力函数,以估计包括Rvir、k、λ的多个血管参数;以及
d.基于所述估计的血管参数和测量的数据计算Ppulse、Pdia、Psys。
49.根据权利要求48所述的方法,其中在至少三个连续心动周期中以每10毫秒一次来提供所述血管半径和所述血流速度数据。
50.根据权利要求48所述的方法,其中通过应用最小二乘法来估计包括Rvir、k、λ的所述多个血管参数。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161437318P | 2011-01-28 | 2011-01-28 | |
| US61/437,318 | 2011-01-28 | ||
| US201161480713P | 2011-04-29 | 2011-04-29 | |
| US61/480,713 | 2011-04-29 | ||
| PCT/IB2012/000124 WO2012101511A2 (en) | 2011-01-28 | 2012-01-27 | System, method and device for automatic and autonomous determination of hemodynamic and cardiac parameters using ultrasound |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103429167A true CN103429167A (zh) | 2013-12-04 |
Family
ID=46581211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012800069148A Pending CN103429167A (zh) | 2011-01-28 | 2012-01-27 | 用于使用超声自动且自主地确定血液动力学和心脏参数的系统、方法以及装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20130310691A1 (zh) |
| EP (1) | EP2667783A2 (zh) |
| JP (1) | JP2014503329A (zh) |
| CN (1) | CN103429167A (zh) |
| CA (1) | CA2823872A1 (zh) |
| IL (1) | IL227421A0 (zh) |
| WO (1) | WO2012101511A2 (zh) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106725598A (zh) * | 2016-12-28 | 2017-05-31 | 苏州科技城医院 | 基于多个经皮超声换能器的心脏超声系统及成像方法 |
| CN108472012A (zh) * | 2015-12-22 | 2018-08-31 | 皇家飞利浦有限公司 | 用于血液动力学管理的多位点连续超声流量测量 |
| CN108471970A (zh) * | 2015-11-10 | 2018-08-31 | 通用电气公司 | 用于估计动脉脉搏波速度的系统和方法 |
| CN109328036A (zh) * | 2016-06-17 | 2019-02-12 | 皇家飞利浦有限公司 | 用于确定患者的血液动力学参数的系统和方法 |
| CN111225617A (zh) * | 2017-10-19 | 2020-06-02 | 皇家飞利浦有限公司 | 超声成像系统和方法 |
| CN111885961A (zh) * | 2018-03-21 | 2020-11-03 | 三星麦迪森株式会社 | 超声诊断设备及其控制方法 |
| CN115715170A (zh) * | 2020-06-11 | 2023-02-24 | 皇家飞利浦有限公司 | 用于估计血液动力学参数的方法 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10667790B2 (en) | 2012-03-26 | 2020-06-02 | Teratech Corporation | Tablet ultrasound system |
| US9877699B2 (en) | 2012-03-26 | 2018-01-30 | Teratech Corporation | Tablet ultrasound system |
| RU2656559C2 (ru) * | 2012-11-11 | 2018-06-05 | Кенкоу Гмбх | Способ и устройство для определения жизненно важных показателей |
| US10226235B2 (en) | 2013-08-09 | 2019-03-12 | Koninklijke Philips N.V. | Method and system for medical imaging and information display |
| KR20150019147A (ko) * | 2013-08-12 | 2015-02-25 | 삼성메디슨 주식회사 | 프로브 제어 방법 및 장치 |
| US10004480B2 (en) * | 2013-08-12 | 2018-06-26 | Samsung Medison Co., Ltd. | Probe control method and apparatus |
| KR20160088918A (ko) * | 2013-11-20 | 2016-07-26 | 가부시키가이샤 알박 | 초음파 프로브 및 초음파 프로브를 이용한 생체 혈관 직경의 측정 방법 |
| JP6243719B2 (ja) * | 2013-12-03 | 2017-12-06 | 株式会社ユネクス | 生体血管状態測定装置 |
| EP3111850A4 (en) * | 2014-02-28 | 2017-12-27 | Hitachi, Ltd. | Ultrasonic image pickup device and method |
| IL234823B (en) * | 2014-09-23 | 2019-10-31 | New N I Medical 2011 Ltd | A system and method of interactive navigation during treatment |
| US10820888B2 (en) * | 2015-03-10 | 2020-11-03 | The Regents Of The University Of California | Miniature ultrasonic imaging system |
| WO2016207889A1 (en) | 2015-06-23 | 2016-12-29 | Hemonitor Medical Ltd. | Continuous ultrasonic monitoring |
| US10792011B2 (en) | 2015-06-23 | 2020-10-06 | Hemonitor Medical Ltd. | Systems and methods for hand-free continuous ultrasonic monitoring |
| US10102452B2 (en) | 2017-03-14 | 2018-10-16 | Clarius Mobile Health Corp. | Systems and methods for identifying an imaged needle in an ultrasound image |
| US11576639B2 (en) * | 2018-09-19 | 2023-02-14 | Beijing Keya Medical Technology Co., Ltd. | Method, system, device and medium for determining a blood flow velocity in a vessel |
| BR102021003873A2 (pt) * | 2021-03-01 | 2022-09-06 | Jose Manoel Medeiros Junior | Método e equipamento de monitoramento de parâmetros cardíacos baseado em ultrassom |
| EP4059437A1 (en) * | 2021-03-15 | 2022-09-21 | Pulsify Medical | Ultrasound system |
| TWI834112B (zh) * | 2022-01-26 | 2024-03-01 | 佳世達科技股份有限公司 | 多功能探頭 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6126602A (en) * | 1998-05-28 | 2000-10-03 | Agilent Technologies, Inc. | Phased array acoustic systems with intra-group processors |
| US6363033B1 (en) * | 1994-08-05 | 2002-03-26 | Acuson Corporation | Method and apparatus for transmit beamformer system |
| CN1650189A (zh) * | 2002-03-05 | 2005-08-03 | 皇家飞利浦电子股份有限公司 | 具有合成的扫描头接线的诊断超声波成像系统 |
| CN101116623A (zh) * | 2002-06-27 | 2008-02-06 | 美国西门子医疗解决公司 | 多维传感器阵列和制造方法 |
| WO2008050334A2 (en) * | 2006-10-26 | 2008-05-02 | Cardiogal Ltd. | Non-invasive cardiac parameter measurement |
| US7534209B2 (en) * | 2000-05-26 | 2009-05-19 | Physiosonics, Inc. | Device and method for mapping and tracking blood flow and determining parameters of blood flow |
| US7597665B2 (en) * | 2000-02-28 | 2009-10-06 | Wilk Peter J | Ultrasonic medical device and associated method |
| US7604599B2 (en) * | 2000-09-29 | 2009-10-20 | New Health Sciences, Inc. | Systems and methods for using dynamic vascular assessment to improve vascular stent placement, application, design and marketing |
| US20100239147A1 (en) * | 2009-03-18 | 2010-09-23 | Siemens Corporation | Method and System for Dynamic Pulmonary Trunk Modeling and Intervention Planning |
| US7806825B2 (en) * | 2002-11-14 | 2010-10-05 | Team Medical Llc | Diagnostic signal processing method and system |
| US7828732B2 (en) * | 2000-11-24 | 2010-11-09 | U-Systems, Inc. | Breast cancer screening with adjunctive ultrasound mammography |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3392482B2 (ja) * | 1993-11-05 | 2003-03-31 | 株式会社東芝 | 心機能検査システム |
| AUPP431898A0 (en) * | 1998-06-24 | 1998-07-16 | Northern Cardiac Sonography Pty Ltd | Ultrasonic cardiac output monitor |
| US7431698B2 (en) * | 2004-01-13 | 2008-10-07 | Ge Medical Systems Global Technology Company, Llc | Apparatus and method for controlling an ultrasound probe |
| WO2007066343A2 (en) * | 2005-12-08 | 2007-06-14 | Dan Furman | Implantable biosensor assembly and health monitoring system |
| KR20080091350A (ko) * | 2006-01-27 | 2008-10-10 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 자동 초음파 도플러 측정 |
| US20090048518A1 (en) * | 2006-12-10 | 2009-02-19 | Cardio Art Technologies Ltd. | Doppler motion sensor apparatus and method of using same |
-
2012
- 2012-01-27 CA CA2823872A patent/CA2823872A1/en not_active Abandoned
- 2012-01-27 JP JP2013550963A patent/JP2014503329A/ja active Pending
- 2012-01-27 WO PCT/IB2012/000124 patent/WO2012101511A2/en active Application Filing
- 2012-01-27 CN CN2012800069148A patent/CN103429167A/zh active Pending
- 2012-01-27 EP EP12739377.5A patent/EP2667783A2/en not_active Withdrawn
-
2013
- 2013-07-10 IL IL227421A patent/IL227421A0/en unknown
- 2013-07-26 US US13/951,757 patent/US20130310691A1/en not_active Abandoned
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6363033B1 (en) * | 1994-08-05 | 2002-03-26 | Acuson Corporation | Method and apparatus for transmit beamformer system |
| US6126602A (en) * | 1998-05-28 | 2000-10-03 | Agilent Technologies, Inc. | Phased array acoustic systems with intra-group processors |
| US7597665B2 (en) * | 2000-02-28 | 2009-10-06 | Wilk Peter J | Ultrasonic medical device and associated method |
| US7534209B2 (en) * | 2000-05-26 | 2009-05-19 | Physiosonics, Inc. | Device and method for mapping and tracking blood flow and determining parameters of blood flow |
| US7604599B2 (en) * | 2000-09-29 | 2009-10-20 | New Health Sciences, Inc. | Systems and methods for using dynamic vascular assessment to improve vascular stent placement, application, design and marketing |
| US7828732B2 (en) * | 2000-11-24 | 2010-11-09 | U-Systems, Inc. | Breast cancer screening with adjunctive ultrasound mammography |
| CN1650189A (zh) * | 2002-03-05 | 2005-08-03 | 皇家飞利浦电子股份有限公司 | 具有合成的扫描头接线的诊断超声波成像系统 |
| CN101116623A (zh) * | 2002-06-27 | 2008-02-06 | 美国西门子医疗解决公司 | 多维传感器阵列和制造方法 |
| US7806825B2 (en) * | 2002-11-14 | 2010-10-05 | Team Medical Llc | Diagnostic signal processing method and system |
| WO2008050334A2 (en) * | 2006-10-26 | 2008-05-02 | Cardiogal Ltd. | Non-invasive cardiac parameter measurement |
| US20100239147A1 (en) * | 2009-03-18 | 2010-09-23 | Siemens Corporation | Method and System for Dynamic Pulmonary Trunk Modeling and Intervention Planning |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108471970A (zh) * | 2015-11-10 | 2018-08-31 | 通用电气公司 | 用于估计动脉脉搏波速度的系统和方法 |
| CN108471970B (zh) * | 2015-11-10 | 2021-06-08 | 通用电气公司 | 用于估计动脉脉搏波速度的系统和方法 |
| CN108472012A (zh) * | 2015-12-22 | 2018-08-31 | 皇家飞利浦有限公司 | 用于血液动力学管理的多位点连续超声流量测量 |
| CN108472012B (zh) * | 2015-12-22 | 2021-09-07 | 皇家飞利浦有限公司 | 用于血液动力学管理的多位点连续超声流量测量 |
| CN109328036A (zh) * | 2016-06-17 | 2019-02-12 | 皇家飞利浦有限公司 | 用于确定患者的血液动力学参数的系统和方法 |
| CN109328036B (zh) * | 2016-06-17 | 2024-03-08 | 皇家飞利浦有限公司 | 用于确定患者的血液动力学参数的系统和方法 |
| CN106725598A (zh) * | 2016-12-28 | 2017-05-31 | 苏州科技城医院 | 基于多个经皮超声换能器的心脏超声系统及成像方法 |
| CN106725598B (zh) * | 2016-12-28 | 2023-09-12 | 苏州科技城医院 | 基于多个经皮超声换能器的心脏超声系统及成像方法 |
| CN111225617A (zh) * | 2017-10-19 | 2020-06-02 | 皇家飞利浦有限公司 | 超声成像系统和方法 |
| CN111225617B (zh) * | 2017-10-19 | 2023-09-08 | 皇家飞利浦有限公司 | 超声成像系统和方法 |
| CN111885961A (zh) * | 2018-03-21 | 2020-11-03 | 三星麦迪森株式会社 | 超声诊断设备及其控制方法 |
| CN115715170A (zh) * | 2020-06-11 | 2023-02-24 | 皇家飞利浦有限公司 | 用于估计血液动力学参数的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012101511A3 (en) | 2012-11-01 |
| EP2667783A2 (en) | 2013-12-04 |
| CA2823872A1 (en) | 2012-08-02 |
| WO2012101511A2 (en) | 2012-08-02 |
| IL227421A0 (en) | 2013-09-30 |
| JP2014503329A (ja) | 2014-02-13 |
| US20130310691A1 (en) | 2013-11-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103429167A (zh) | 用于使用超声自动且自主地确定血液动力学和心脏参数的系统、方法以及装置 | |
| JP7562936B2 (ja) | 自動壁追跡を伴う超音波システム | |
| EP3742979B1 (en) | Guided-transcranial ultrasound imaging using neural networks and associated devices, systems, and methods | |
| KR102642000B1 (ko) | 의료 영상 장치 및 그 동작 방법 | |
| JP7152955B2 (ja) | 動作ベースの画像セグメント化のシステムおよび方法 | |
| KR102156297B1 (ko) | 의료 영상 장치 및 그 동작방법 | |
| JP6443517B2 (ja) | 生体情報測定装置および生体情報測定装置もしくは生体情報測定システムの作動方法 | |
| US20210350529A1 (en) | Gating machine learning predictions on medical ultrasound images via risk and uncertainty quantification | |
| CN110415248A (zh) | 一种基于超声的血管监测方法、装置、设备及存储介质 | |
| CN117119966A (zh) | 用于超声成像的便携式超声装置和方法 | |
| CN102579017A (zh) | 无创血流动力学参数分析仪 | |
| US20150243190A1 (en) | Blood pressure measurement apparatus | |
| KR20160064442A (ko) | 의료영상처리장치 및 이를 이용한 의료영상정합방법 | |
| KR20180031991A (ko) | 초음파의 도플러 효과를 이용한 cpr 피드백 장치 및 이의 제어 방법 | |
| JP2016027835A (ja) | 超音波撮像装置及び方法 | |
| WO2018016233A1 (ja) | 超音波撮像装置およびその演算方法 | |
| WO2014030174A2 (en) | Automated evaluation of arterial stiffness for a non-invasive screening | |
| Zakrzewski et al. | Arterial blood pressure estimation using ultrasound: Clinical results on healthy volunteers and a medicated hypertensive volunteer | |
| CN118644438A (zh) | 机器学习模型、程序、超声波诊断装置、超声波诊断系统、图像处理装置及训练装置 | |
| JP7579326B2 (ja) | 心臓用装置 | |
| Beyaz | An acoustic blood pressure sensing scheme using time of flight and shear wave elastography techniques | |
| US12213840B2 (en) | Automatically establishing measurement location controls for doppler ultrasound | |
| CN103687549B (zh) | 超声波探测器、生物体信息测定装置以及生物体信息测定方法 | |
| KR20170126722A (ko) | 초음파 영상 장치 및 그 동작 방법 | |
| CN201912074U (zh) | 无创血流动力学参数分析仪 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20131204 |