CN103190879A - 一种用于肠道疾病检测机器人的外置式驱动机构 - Google Patents
一种用于肠道疾病检测机器人的外置式驱动机构 Download PDFInfo
- Publication number
- CN103190879A CN103190879A CN2013101210163A CN201310121016A CN103190879A CN 103190879 A CN103190879 A CN 103190879A CN 2013101210163 A CN2013101210163 A CN 2013101210163A CN 201310121016 A CN201310121016 A CN 201310121016A CN 103190879 A CN103190879 A CN 103190879A
- Authority
- CN
- China
- Prior art keywords
- groups
- mainboard
- guide pad
- intestinal tract
- machine people
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Endoscopes (AREA)
Abstract
本发明公开了一种用于肠道疾病检测机器人的外置式驱动机构,其包括驱动主板、设置在所述驱动主板上的驱动模块和设置在所述驱动主板上的导向块,所述驱动模块包括固定设置在所述驱动主板上的驱动电机和设置在所述驱动电机主轴上的绕线轮,所述绕线轮上卷绕有绳索,所述绳索通过所述导向块。本发明不仅能减小肠道疾病检测机器人进入人体部分的体积还利用可控制多轴弯曲使肠道疾病检测机器人更加灵活。
Description
技术领域
本发明涉及医疗机器人技术领域,尤其涉及一种医疗机器人驱动机构。
背景技术
由于有害食品、环境污染和精神压力等因素的影响,许多人遭受肠道炎、肠道肿瘤甚至肠道癌等肠道疾病的困扰。因此迫切需要一种高精度、弯曲灵活的肠道疾病检测机器人,用于实现对肠道疾病的检测。
在肠道疾病检测机器人使用时,该机器人系统中的驱动机构显得尤为重要。目前的肠道疾病检测机器人的驱动方式以内置式居多,包括气压驱动、记忆合金驱动、压电驱动等等,但这些驱动方式都存在相应的缺点和不足,如内窥镜本身体积较大、结构复杂、功耗大、发热严重、控制电路复杂、弯曲灵活性不好等等,在肠道疾病检测过程中这些不足之处会给病人带来痛苦。同时由于上述缺点和不足,会导致该类机器人的控制精度不高,甚至产生误动作,造成肠道壁破损,安全系数不高,因此有必要针对传统肠道疾病检测机器人设计一种外置式、并可控制多轴弯曲的驱动机构。
发明内容
本发明的目的是提供一种外置式、并可控制多轴弯曲的用于肠道疾病检测机器人的驱动机构。
为达到上述发明目的,本发明采用的技术方案是:一种用于肠道疾病检测机器人的外置式驱动机构,其包括驱动主板、设置在所述驱动主板上的驱动模块和设置在所述驱动主板上的导向块,所述驱动模块包括固定设置在所述驱动主板上的驱动电机和设置在所述驱动电机主轴上的绕线轮,所述绕线轮上卷绕有绳索,所述绳索通过所述导向块。
优选的技术方案,所述驱动模块设置有十组。
进一步技术方案,所述驱动主板为扇形结构;十组所述的驱动模块分为由4组驱动模块组成的上四组和由六组驱动模块组成的下六组,所述上四组的位置高于所述下六组的位置;所述上四组、下六组在所述驱动主板上分别呈扇形分布。
上述技术方案中,驱动主板外形扇形,正面从低到高分三层,依次为一层、二层和三层,一层用于固定所述下六组驱动模块和导向块;二层用于引导驱动绳索;三层用于固定所述上四组法兰板。
优选的技术方案,所述绕线轮设置有两个不同直径的绕线槽,所述绕线槽与所述电机的转子同轴,所述绕线槽内设置有固定所述绳索的固定机构。
优选的技术方案,所述导向块通过支撑架固定在所述驱动主板上。
进一步技术方案,所述导向块包括导向块本体和设置在所述导向块本体上的覆盖板,所述导向块本体和所述覆盖板之间设置有导向槽,所述覆盖板上设置有调整螺钉。
上述技术方案中,支撑架用于固定所述导向块,导向块断面为正方形,在其侧面上开有四对半圆形导向槽,用于引导驱动绳索;覆盖板为具有一定厚度的扇形条板,板形与导向块侧面完全相同,用于固定驱动绳索。
优选的技术方案,所述驱动电机通过一端设置有凸块的法兰板固定在所述驱动主板上。
进一步技术方案,所述驱动主板底面还设置有弧形调整块,所述调整块与所述法兰板上的凸块相配合。
上述技术方案中,法兰板板面成矩形,板面中心开一通孔,在通孔圆周方向间隔120度均匀分布三个通孔,用于固定驱动电机,在板面的四个角位置对称设置四个调整通孔,法兰板的一端设置有一矩形凸块,下六组的法兰板上的凸块上还设置有螺纹通孔,与调整块上设置的螺纹通孔相配合。
由于上述技术方案运用,本发明与现有技术相比具有下列优点:
1、本发明是外置式的肠道疾病检测机器人驱动机构,能够减小机器人进入人体部分的体积,减轻病人的痛苦,并且外置式的驱动机构便于维修保养;
2、本发明采用多轴弯曲技术,能使肠道疾病检测机器人在使用时更加灵活。
附图说明
图1为本发明立体图一;
图2为本发明立体图二;
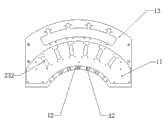
图3为本发明俯视图;
图4为法兰板主视图;
图5为法兰板凸块侧视图;
图6为绕线轮的局部剖视图。
其中:1、驱动主板;2、驱动模块; 3、导向块;4、支撑架;5、调整块;11、驱动主板第一层;12、驱动主板第二层;13、驱动主板第三层;21、驱动电机;22、绕线轮;23、法兰板;31、覆盖板;32、导向槽;221、绕线槽;222、小圆柱体;223、螺纹通孔;231、凸块;232、矩形通孔。
具体实施方式
下面结合附图及实施例对本发明作进一步描述:
实施例一:
如图1-6所示,一种用于肠道疾病检测机器人的外置式驱动机构,包括驱动主板1、设置在驱动主板1上的驱动模块2和设置在驱动主板1上的导向块3,驱动模块2包括固定设置在驱动主板1上的驱动电机21和设置在驱动电机21主轴上的绕线轮22,绕线轮22上卷绕有绳索,绳索通过导向块3。
驱动主板1为扇形结构;驱动模块2设置有十组;十组的驱动模块2分为由4组驱动模块2组成的上四组和由六组驱动模块2组成的下六组,上四组的位置高于下六组的位置;上四组、下六组在驱动主板1上分别呈扇形分布。
驱动主板1长为300 mm,宽为190 mm,高为18.5 mm,最薄处厚度为3 mm,驱动主板1正面从低到高分驱动主板第三层13,依次为驱动主板第一层11、驱动主板第二层12和驱动主板第三层13。驱动主板第一层11主要用于固定所述下六组法兰板23和支撑架4,驱动主板第一层11沿圆周方向均布六个矩形通孔242,在矩形通孔242首尾两侧分别对称设置两个螺纹通孔,用于固定所述支撑架4;在驱动主板第一层11另一半沿圆周方向设置五个通孔,其中位于两侧的两个通孔用于将驱动主板1固定于支座,另三个用于固定调整块5;驱动主板第二层12主要用于引导驱动绳索,沿圆周方向开有对称分布的六对半圆形导向槽32和五个螺纹通孔;驱动主板第三层13主要用于固定上四组法兰板23,其上对称设置一个锯齿形异形通孔,在异形通孔两侧对称设置四组螺纹通孔,每组由四个对称分布的螺纹通孔组成,驱动主板第三层13四个角位置对称设置四个沉头螺纹通孔,用于将驱动主板1固定于支座。
绕线轮22设置有两个不同直径的绕线槽231,绕线槽231与电机的转子同轴,绕线槽231内设置有固定绳索的固定机构。
绕线轮22具体由两个直径不等的同轴设置的圆柱体端面拼接而成,小圆柱体222的外端面中心开一个孔,孔形与所选电机的主轴成间隙配合,大圆柱的外端面中心开一个孔,孔两侧开有两个对称设置的螺纹通孔223,大圆柱体的柱面沿圆周方向开两个相等宽度的绕线槽231,用于缠绕驱动绳索,上、下绕线槽231的内环面均开有一个通孔。
导向块3通过1.5mm的支撑架4固定在驱动主板1上,导向块3包括导向块3本体和设置在导向块3本体上的覆盖板31,导向块3本体和覆盖板31之间设置有导向槽32,覆盖板31上设置有调整螺钉。支撑架4用于固定所述导向块3,导向块3断面为正方形,在其侧面上开有四对半圆形导向槽32,用于引导驱动绳索;覆盖板31为具有一定厚度的扇形条板,板形与导向块3侧面完全相同,用于固定驱动绳索。
驱动电机21具体为直流伺服电机,驱动电机21通过一端设置有凸块241的法兰板23固定在驱动主板1上。驱动主板1底面还设置有弧形调整块5,调整块5与法兰板23上的凸块241相配合,有利于调节驱动线的松紧。法兰板23板面成矩形,板面中心开一通孔,在通孔圆周方向间隔120度均匀分布三个通孔,用于固定驱动电机21,在板面的四个角位置对称设置四个4mm的调整通孔,法兰板23的一端设置有一矩形凸块241,下六组的法兰板23上的凸块241上还设置有螺纹通孔,与调整块5上设置的螺纹通孔相配合。
本实施例中,覆盖板31、支撑架4都使用具有一定厚度的铝板,保证了整体强度和刚度,利于绳索通过;各部件均通过统一的紧定螺钉固定在驱动主板1上,能使各部件集成化、统一化,便于保养和维护;采用多个驱动模块2,实现可控制多轴弯曲,能使肠道疾病检测机器人活动灵活。
Claims (8)
1. 一种用于肠道疾病检测机器人的外置式驱动机构,其特征在于:其包括驱动主板、设置在所述驱动主板上的驱动模块和设置在所述驱动主板上的导向块,所述驱动模块包括固定设置在所述驱动主板上的驱动电机和设置在所述驱动电机主轴上的绕线轮,所述绕线轮上卷绕有绳索,所述绳索通过所述导向块。
2. 根据权利要求1所述用于肠道疾病检测机器人的外置式驱动机构,其特征在于:所述驱动模块设置有十组。
3. 根据权利要求1或2所述用于肠道疾病检测机器人的外置式驱动机构,其特征在于:所述驱动主板为扇形结构;十组所述的驱动模块分为由4组驱动模块组成的上四组和由六组驱动模块组成的下六组,所述上四组的位置高于所述下六组的位置;所述上四组、下六组在所述驱动主板上分别呈扇形分布。
4. 根据权利要求1所述用于肠道疾病检测机器人的外置式驱动机构,其特征在于:所述绕线轮设置有两个不同直径的绕线槽,所述绕线槽与所述电机的转子同轴,所述绕线槽内设置有固定所述绳索的固定机构。
5. 根据权利要求1所述用于肠道疾病检测机器人的外置式驱动机构,其特征在于:所述导向块通过支撑架固定在所述驱动主板上。
6. 根据权利要求5所述用于肠道疾病检测机器人的外置式驱动机构,其特征在于:所述导向块包括导向块本体和设置在所述导向块本体上的覆盖板,所述导向块本体和所述覆盖板之间设置有导向槽,所述覆盖板上设置有调整螺钉。
7. 根据权利要求1所述用于肠道疾病检测机器人的外置式驱动机构,其特征在于:所述驱动电机通过一端设置有凸块的法兰板固定在所述驱动主板上。
8. 根据权利要求1或7所述用于肠道疾病检测机器人的外置式驱动机构,其特征在于:所述驱动主板底面还设置有弧形调整块,所述调整块与所述法兰板上的凸块相配合。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2013101210163A CN103190879A (zh) | 2013-04-09 | 2013-04-09 | 一种用于肠道疾病检测机器人的外置式驱动机构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2013101210163A CN103190879A (zh) | 2013-04-09 | 2013-04-09 | 一种用于肠道疾病检测机器人的外置式驱动机构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103190879A true CN103190879A (zh) | 2013-07-10 |
Family
ID=48713830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2013101210163A Pending CN103190879A (zh) | 2013-04-09 | 2013-04-09 | 一种用于肠道疾病检测机器人的外置式驱动机构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103190879A (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105796043A (zh) * | 2016-03-09 | 2016-07-27 | 苏州大学 | 一种基于压力传感器信息的内窥镜机器人控制方法及装置 |
| CN110757441A (zh) * | 2019-10-21 | 2020-02-07 | 中山大学 | 一种多关节联合运动的柔性机械臂驱动装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020156347A1 (en) * | 2001-04-24 | 2002-10-24 | Byungkyu Kim | Micro-robot for colonoscope with motor locomotion and system for colonoscope using the same |
| KR20020094528A (ko) * | 2001-06-12 | 2002-12-18 | 한국과학기술연구원 | 마이크로 로봇 |
| US20080183033A1 (en) * | 2005-05-27 | 2008-07-31 | Bern M Jonathan | Endoscope Propulsion System and Method |
| CN101653353A (zh) * | 2009-08-28 | 2010-02-24 | 哈尔滨工业大学 | 连续体型半自主式内窥镜机器人 |
| US20110238083A1 (en) * | 2005-07-01 | 2011-09-29 | Hansen Medical, Inc. | Robotic catheter system and methods |
| CN203280357U (zh) * | 2013-04-09 | 2013-11-13 | 苏州大学 | 一种用于肠道疾病检测机器人的外置式驱动机构 |
-
2013
- 2013-04-09 CN CN2013101210163A patent/CN103190879A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020156347A1 (en) * | 2001-04-24 | 2002-10-24 | Byungkyu Kim | Micro-robot for colonoscope with motor locomotion and system for colonoscope using the same |
| KR20020094528A (ko) * | 2001-06-12 | 2002-12-18 | 한국과학기술연구원 | 마이크로 로봇 |
| US20080183033A1 (en) * | 2005-05-27 | 2008-07-31 | Bern M Jonathan | Endoscope Propulsion System and Method |
| US20110238083A1 (en) * | 2005-07-01 | 2011-09-29 | Hansen Medical, Inc. | Robotic catheter system and methods |
| CN101653353A (zh) * | 2009-08-28 | 2010-02-24 | 哈尔滨工业大学 | 连续体型半自主式内窥镜机器人 |
| CN203280357U (zh) * | 2013-04-09 | 2013-11-13 | 苏州大学 | 一种用于肠道疾病检测机器人的外置式驱动机构 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105796043A (zh) * | 2016-03-09 | 2016-07-27 | 苏州大学 | 一种基于压力传感器信息的内窥镜机器人控制方法及装置 |
| CN105796043B (zh) * | 2016-03-09 | 2018-11-02 | 苏州大学 | 一种基于压力传感器信息的内窥镜机器人控制装置 |
| CN110757441A (zh) * | 2019-10-21 | 2020-02-07 | 中山大学 | 一种多关节联合运动的柔性机械臂驱动装置 |
| CN110757441B (zh) * | 2019-10-21 | 2023-02-17 | 中山大学 | 一种多关节联合运动的柔性机械臂驱动装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103190879A (zh) | 一种用于肠道疾病检测机器人的外置式驱动机构 | |
| WO2023108979A1 (zh) | 一种分体驱动式介入手术机器人 | |
| CN105597235B (zh) | 一种新型肿瘤放疗装置 | |
| CN105749433B (zh) | 一种颈部肿瘤放疗装置 | |
| CN203280357U (zh) | 一种用于肠道疾病检测机器人的外置式驱动机构 | |
| CN108736073A (zh) | 一种卷绕方形电池的同轴双卷针卷绕装置及卷绕方法 | |
| CN104833567B (zh) | 一种管状带横向刚性试验机 | |
| CN109079055A (zh) | 一种结构改进的端子整形设备 | |
| CN203303519U (zh) | 大型医疗设备治疗床 | |
| WO2023109641A1 (zh) | 一种一体化的多通道可步进式电极支架及其制作方法 | |
| CN210250808U (zh) | 心内科用心脏复苏装置 | |
| CN208798233U (zh) | 一种用于蓝牙耳机的快速测试模块 | |
| CN107931457B (zh) | 一种冷柜内胆侧边端边同步铆设备 | |
| CN208355625U (zh) | 一种心内科病人用术后护理装置 | |
| CN206999852U (zh) | 一种交叉式数控仿形转印烫金机 | |
| CN211561619U (zh) | 放疗系统中的治疗床装置 | |
| CN203001308U (zh) | 一种护理机械臂 | |
| CN210057179U (zh) | 一种双端支撑治疗床 | |
| CN109876306B (zh) | 一种双端支撑治疗床 | |
| CN114391947A (zh) | 一种分级控制式介入手术机器人 | |
| CN106984705A (zh) | 锂离子电池极耳冲孔裁切剪角机 | |
| WO2021068287A1 (zh) | 一种全身pet-ct联用装置 | |
| CN218075024U (zh) | 一种儿科颅神经检查装置 | |
| CN208808448U (zh) | 一种稳定紧凑型颏拖托升降结构 | |
| CN101367169A (zh) | 一种横梁导轨装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C12 | Rejection of a patent application after its publication | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20130710 |