CN103085712A - 汽车防撞自控装置 - Google Patents
汽车防撞自控装置 Download PDFInfo
- Publication number
- CN103085712A CN103085712A CN 201110349797 CN201110349797A CN103085712A CN 103085712 A CN103085712 A CN 103085712A CN 201110349797 CN201110349797 CN 201110349797 CN 201110349797 A CN201110349797 A CN 201110349797A CN 103085712 A CN103085712 A CN 103085712A
- Authority
- CN
- China
- Prior art keywords
- automobile
- control device
- measurement
- speed
- automatic control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
Landscapes
- Radar Systems Or Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
本发明公开了一种汽车防撞自控装置,其主要技术特征是:由单片机、声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置构成;其中,毫米微波雷达测速测距装置包括发射装置和接收装置,声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置分别与单片机相连。本发明采用测速测距双重测量的方法,实现汽车的精确自控;汽车防撞装置的开关状态可手动控制,并显示在仪表盘上;汽车的声光报警装置不仅可以提示本车驾驶员,也可以提示后车保持安全的行车距离。本发明高度智能化,处理指令的速度远远高于人脑的最快反应速度,适于安装在各种类型汽车的安装,减少事故的发生。
Description
技术领域
本发明涉及一种汽车防撞装置,特别是一种汽车防撞自控装置。
背景技术
汽车碰撞事故大多是由行车速度过快、行车间距过小、刹车不及时等因素造成。根据最新调查显示:交通事故的碰撞事故率每年都在递增,75%的碰撞事故发生在车辆低速行驶过程中,其中有一半的事故在碰撞发生前驾驶员根本没有踩刹车。现有的防撞技术仅仅局限在单次测速、测距或测速测距相结合的方式,虽然能够大大减少汽车追尾事故发生,起到保驾护航作用,但有时会产生误差,给驾驶者带来不必要的麻烦,且这类装置价格较高,无法普及应用。
发明内容
本发明的目的在于克服现有技术的不足,提供一种采用测速测距双重测量方法并具有自动刹车、自动降速多功能的汽车防撞自控装置。
本发明解决其技术问题是采取以下技术方案实现的:
一种汽车防撞自控装置,由单片机、声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置构成;其中,毫米微波雷达测速测距装置包括发射装置和接收装置,声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置分别与单片机相连。
而且,所述的仪表盘由显示器和开关按钮构成。
而且,所述的单片机采用AT89C2051单片机,由FLASH存储器、RAM、I/O接口构成。
而且,所述的霍尔集成器件测速装置和毫米微波雷达测速测距装置均通过单片机与刹车控制装置相连,单片机经过运算、比较、然后做出判断,控制汽车的自动降速和刹车。
而且,所述的霍尔集成器件测速装置由霍尔集成传感器和装有永久磁铁的转盘构成,其中,霍尔集成传感器是A3144E芯片,采用半导体技术集成的磁敏电路。
本发明的优点和积极效果是:
1、本发明中的仪表盘有开关按钮和显示器,驾驶者可以根据自己的需要和路况决定是否采用汽车防撞自控装置,显示器显示毫米微波雷达测速测距装置测得的本车与前车的相对距离与速度以及霍尔集成器件测速装置测得的本车车速,并联动声光报警装置对驾驶者进行相应的提示。此装置进行自动制动刹车及减速时,会点亮刹车灯,提醒后车保持安全的行驶距离。
2、本发明采用测速测距双重测量的方法,实现汽车的精确自控;汽车防撞装置的开关状态可手动控制,并显示在仪表盘上;汽车的声光报警装置不仅可以提示本车驾驶员,也可以提示后车保持安全的行车距离。本发明高度智能化,处理指令的速度远远高于人脑的最快反应速度,适于安装在各种类型汽车的安装,减少事故的发生。
附图说明
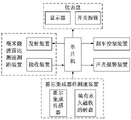
图1是本发明的结构连接框图。
具体实施方式
以下结合附图对本发明实施例做进一步详述:
一种汽车防撞自控装置,由单片机、声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置构成;其中,毫米微波雷达测速测距装置包括发射装置和接收装置,声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置分别与单片机相连。
结合图1,阐述本发明的工作原理:毫米微波雷达测速测距装置的发射装置和接收装置用于发送和接收毫米微波,检测前车与本车的相对距离和速度,霍尔集成器件测速装置检测本车自身车速,利用毫米微波雷达测速测距装置和霍尔集成器件测速装置准确检测速度值与距离值,并迅速反馈给单片机,单片机经过运算、比较、然后做出判断,并将数据显示在仪表盘的显示器上。当距离和速度为安全值时,声光报警装置将不产生作用;当距离和速度为警告值时,启动声光报警装置,采用语音提示和绿色灯光警告驾驶员进行刹车;当距离和速度为危险值时,启动声光报警装置,采用语音报警和红色灯光警示驾驶员,并对本车进行自动刹车;当距离和速度为警告值与危险值之间时,启动声光报警装置,采用语音提示和黄色灯光警示驾驶员,并对本车进行自动刹车。在本系统的开发过程中,根据不同的行车情况,较深入的探讨警告值和危险值的情况,建立了警告值模型和危险值模型,然后,依据驾驶员所要达到的基本功能,设计警告值、安全值、危险值的系统方案。
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
Claims (5)
1.一种汽车防撞自控装置,其特征在于:由单片机、声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置构成;其中,毫米微波雷达测速测距装置包括发射装置和接收装置,声光报警装置、刹车控制装置、仪表盘、霍尔集成器件测速装置和毫米微波雷达测速测距装置分别与单片机相连。
2.根据权利要求1所述的汽车防撞自控装置,其特征在于:所述的仪表盘由显示器和开关按钮构成。
3.根据权利要求1所述的汽车防撞自控装置,其特征在于:所述的单片机采用AT89C2051单片机,由FLASH存储器、RAM、I/O接口构成。
4.根据权利要求1所述的汽车防撞自控装置,其特征在于:所述的霍尔集成器件测速装置和毫米微波雷达测速测距装置均通过单片机与刹车控制装置相连,单片机经过运算、比较、然后做出判断,控制汽车的自动降速和刹车。
5.根据权利要求1所述的汽车防撞自控装置,其特征在于:所述的霍尔集成器件测速装置由霍尔集成传感器和装有永久磁铁的转盘构成,其中,霍尔集成传感器是A3144E芯片,采用半导体技术集成的磁敏电路。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201110349797 CN103085712A (zh) | 2011-11-08 | 2011-11-08 | 汽车防撞自控装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201110349797 CN103085712A (zh) | 2011-11-08 | 2011-11-08 | 汽车防撞自控装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103085712A true CN103085712A (zh) | 2013-05-08 |
Family
ID=48199006
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201110349797 Pending CN103085712A (zh) | 2011-11-08 | 2011-11-08 | 汽车防撞自控装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103085712A (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103754158A (zh) * | 2013-12-27 | 2014-04-30 | 宁波大学 | 一种汽车防后车追尾的预警装置及预警方法 |
| CN104527629A (zh) * | 2014-12-04 | 2015-04-22 | 吉林东光奥威汽车制动系统有限公司 | 一种汽车真空助力器自动紧急制动系统 |
| CN105259823A (zh) * | 2015-08-27 | 2016-01-20 | 欧科佳(上海)汽车电子设备有限公司 | 一种带显示屏的触摸按键 |
| CN106585549A (zh) * | 2016-12-14 | 2017-04-26 | 兰州工业学院 | 一种车辆智能防撞系统 |
| CN109367529A (zh) * | 2018-11-30 | 2019-02-22 | 南京天安汽车电子科技股份有限公司 | 毫米波雷达组合安装结构及虚拟隧道构建与障碍判断方法 |
-
2011
- 2011-11-08 CN CN 201110349797 patent/CN103085712A/zh active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103754158A (zh) * | 2013-12-27 | 2014-04-30 | 宁波大学 | 一种汽车防后车追尾的预警装置及预警方法 |
| CN103754158B (zh) * | 2013-12-27 | 2016-03-02 | 宁波大学 | 一种汽车防后车追尾的预警装置及预警方法 |
| CN104527629A (zh) * | 2014-12-04 | 2015-04-22 | 吉林东光奥威汽车制动系统有限公司 | 一种汽车真空助力器自动紧急制动系统 |
| CN105259823A (zh) * | 2015-08-27 | 2016-01-20 | 欧科佳(上海)汽车电子设备有限公司 | 一种带显示屏的触摸按键 |
| CN106585549A (zh) * | 2016-12-14 | 2017-04-26 | 兰州工业学院 | 一种车辆智能防撞系统 |
| CN109367529A (zh) * | 2018-11-30 | 2019-02-22 | 南京天安汽车电子科技股份有限公司 | 毫米波雷达组合安装结构及虚拟隧道构建与障碍判断方法 |
| CN109367529B (zh) * | 2018-11-30 | 2024-03-26 | 南京天安汽车电子科技股份有限公司 | 毫米波雷达组合安装结构及虚拟隧道构建与障碍判断方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203391717U (zh) | 一种基于msp430单片机的汽车防撞预警装置 | |
| CN102795184B (zh) | 防追尾主动避让系统及其控制方法 | |
| CN203623585U (zh) | 一种基于arm的汽车安全行驶自动测距分级预警系统 | |
| CN102785660A (zh) | 车辆防碰撞预警装置 | |
| CN203558055U (zh) | 误踩油门控制装置 | |
| US20080136618A1 (en) | Control method of rear lamp for preventing crash | |
| CN103318176A (zh) | 一种客车自适应巡航系统及其控制方法 | |
| CN103465886A (zh) | 减少汽车碰撞死伤危险的智能防护安全装置 | |
| CN102756730A (zh) | 一种基于毫米波检测的汽车防撞装置、系统和方法 | |
| CN102849006B (zh) | 一种车载智能安全预警系统 | |
| CN103978927A (zh) | 一种基于前向防撞系统的汽车刹车尾灯自动控制系统 | |
| CN103085712A (zh) | 汽车防撞自控装置 | |
| CN102991412A (zh) | 一种汽车紧急制动报警系统及其控制方法 | |
| CN104648388A (zh) | 一种基于毫米波雷达的前向防碰撞预警方法 | |
| CN104943608A (zh) | 车载智能显示装置及控制方法 | |
| CN103692972A (zh) | 汽车主动式防追尾预警系统装置 | |
| CN103895645A (zh) | 一种汽车防撞方法及系统 | |
| CN104648245A (zh) | 一种基于激光雷达的前向防碰撞预警方法 | |
| CN103287325A (zh) | 一种汽车防追尾及碰撞报警装置 | |
| CN205417368U (zh) | 基于its的高速公路行车安全预警器 | |
| CN205220505U (zh) | 一种行车记录车辆防撞系统 | |
| CN202213553U (zh) | 车距显示预警组合仪表 | |
| CN106696958A (zh) | 汽车防撞装置 | |
| CN202106957U (zh) | 具有自动防撞系统的客车 | |
| CN104658318A (zh) | 一种基于红外传感器的前向防碰撞预警方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20130508 |