CN102961186A - 用于确定受检者方位的方法和设备 - Google Patents
用于确定受检者方位的方法和设备 Download PDFInfo
- Publication number
- CN102961186A CN102961186A CN2012103205841A CN201210320584A CN102961186A CN 102961186 A CN102961186 A CN 102961186A CN 2012103205841 A CN2012103205841 A CN 2012103205841A CN 201210320584 A CN201210320584 A CN 201210320584A CN 102961186 A CN102961186 A CN 102961186A
- Authority
- CN
- China
- Prior art keywords
- under inspection
- person under
- orientation
- imaging system
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title abstract description 26
- 238000003384 imaging method Methods 0.000 claims abstract description 77
- 238000007689 inspection Methods 0.000 claims description 156
- 238000002591 computed tomography Methods 0.000 description 8
- 230000000007 visual effect Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 238000004458 analytical method Methods 0.000 description 5
- 238000003745 diagnosis Methods 0.000 description 5
- 238000013170 computed tomography imaging Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000002372 labelling Methods 0.000 description 4
- 210000004072 lung Anatomy 0.000 description 4
- 230000008520 organization Effects 0.000 description 4
- 238000002600 positron emission tomography Methods 0.000 description 4
- 210000000056 organ Anatomy 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000012879 PET imaging Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000012512 characterization method Methods 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 230000001815 facial effect Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 241001269238 Data Species 0.000 description 1
- 238000005481 NMR spectroscopy Methods 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 230000002902 bimodal effect Effects 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000002203 pretreatment Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 208000012802 recumbency Diseases 0.000 description 1
- 238000002603 single-photon emission computed tomography Methods 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4417—Constructional features of apparatus for radiation diagnosis related to combined acquisition of different diagnostic modalities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/467—Arrangements for interfacing with the operator or the patient characterised by special input means
- A61B6/468—Arrangements for interfacing with the operator or the patient characterised by special input means allowing annotation or message recording
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/547—Control of apparatus or devices for radiation diagnosis involving tracking of position of the device or parts of the device
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/24—Aligning, centring, orientation detection or correction of the image
- G06V10/242—Aligning, centring, orientation detection or correction of the image by image rotation, e.g. by 90 degrees
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/037—Emission tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0492—Positioning of patients; Tiltable beds or the like using markers or indicia for aiding patient positioning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- High Energy & Nuclear Physics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Measurement Of Radiation (AREA)
- Nuclear Medicine (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
本发明的名称为:用于确定受检者方位的方法和设备。一种用于确定受检者方位的方法包括:在成像系统处接收指示正在成像的受检者的方位的输入、使用特征识别系统自动确定受检者的方位、比较接收的输入与自动确定的方位以及生成图像,该图像包括基于比较的方位标记。在本文还描述对象方位识别系统和成像系统。
Description
技术领域
本文公开的主旨大体上涉及成像系统,并且更具体地,涉及用于使用成像系统确定受检者的方位的方法和设备。
背景技术
在不同的应用中使用医学成像系统来对患者的不同区域或范围(例如,不同的器官)成像。例如,计算机断层摄影(CT)成像系统可用于生成患者的骨头或器官的图像。在操作中,操作者手动键入用于对患者进行扫描的信息。这样的信息可包括,例如,患者姓名、患者性别以及限定在扫描期间要给予患者的辐射剂量的各种扫描协议。
另外,操作者手动键入患者的方位。患者的方位指示患者在成像台架(table)上的位置,例如,患者在成像过程期间是否面朝上、面朝下地安置,等。然后患者的方位,如由操作者键入的那样,打印在重建图像中的至少一个上以使医生能够进行医疗诊断。打印在图像上的方位信息使医生能够大体上识别各种器官的位点和感兴趣的其他项目,诸如或例如,损伤。方位信息可包括打印在图像上的左标识符和右标识符。该左标识符和右标识符大体上分别指图像的左侧和右侧。因此,当采用仰卧位对患者成像时,预期左肺出现在图像的左侧上并且预期右肺出现在图像的右侧上。
然而,操作者可疏忽地将不正确的患者方位键入成像系统内。例如,操作者可键入这样的信息,其指示当患者实际上处于仰卧位时,采用俯卧位头向前地对患者成像。在该情况下,左肺将出现在图像的右侧上并且右肺将出现在图像的左侧上。尽管应该意识到医生具有确定生成的图像反映与打印在图像上的方位信息不同的方位的医疗技术,但不正确的方位信息仍可导致医生花费额外的时间来进行诊断。更具体地,医生可能必须首先确定图像的正确方位并然后进行诊断。因此,由操作者键入的不正确的方位信息可导致进行诊断的时间增加并且在一些情况下可使医生给出不正确的诊断。
发明内容
在一个实施例中,提供用于对受检者成像的方法。该方法包括:在成像系统处接收指示正在成像的受检者的方位的输入,使用特征识别系统自动确定受检者的方位,比较接收的输入与自动确定的方位,以及生成图像,该图像包括基于该比较的方位标记。
在另一个实施例中,提供对象方位识别系统(OORS)。该OORS包括至少一个特征识别装置,以及对象方位识别模块(OORM),该对象方位识别模块配置成:接收用户输入,其指示正在成像的受检者的方位;从特征识别装置接收输入,其指示受检者的方位;比较用户输入与从特征识别装置接收的输入;以及生成图像,该图像包括基于该比较的方位标记。
在另外的实施例中,提供用于生成受检者的图像的成像系统。该成像系统包括对象方位识别系统(OORS)。该OORS包括至少一个特征识别装置,以及对象方位识别模块(OORM),该对象方位识别模块配置成:接收用户输入,其指示正在成像的受检者的方位;从特征识别装置接收输入,其指示受检者的方位;比较用户输入与从特征识别装置接收的输入;以及生成图像,该图像包括基于该比较的方位标记。
附图说明
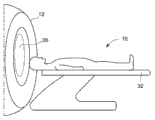
图1是根据各种实施例形成的示范性多模态成像系统的绘图;
图2是图示根据各种实施例的用于确定受检者方位的示范性方法的流程图;
图3是根据各种实施例的采用示范性方位安置的受检者的侧视图;
图4是根据各种实施例的采用另一个示范性方位安置的受检者的侧视图;
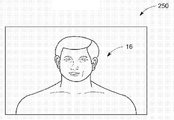
图5是可根据各种实施例生成的示范性图像;
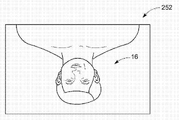
图6是可根据各种实施例生成的另一个示范性图像;
图7是可根据各种实施例生成的又一个示范性图像;
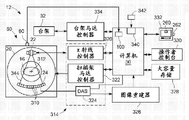
图8是形成在图1中图示的系统的一部分的一个模态单元的方框示意图。
具体实施方式
当与附图结合阅读时,前面的简要描述以及各种实施例的下列详细描述将更好理解。就图示各种实施例的功能框的图来说,功能框不一定指示硬件电路之间的划分。从而,例如,功能框中的一个或多个可采用单件硬件(例如,通用信号处理器或一块随机存取存储器、硬盘等等)或多件硬件实现。相似地,程序可以是独立程序,可作为操作系统中的子程序而包含,可以是安装的软件包中的功能,等等。应该理解各种实施例不限于图中示出的设置和工具。
图1是根据各种实施例形成的示范性成像系统10的绘图。尽管在包括计算机断层摄影(CT)成像系统和正电子发射断层摄影(PET)成像系统的示范性双模态成像系统的背景下描述各种实施例,应该理解,预期可使用能够进行本文描述的功能的其他成像系统。
参照图1,图示多模态成像系统10,并且其包括第一模态单元12和第二模态单元14。这两个模态单元12和14,使成像系统10能够使用第一模态单元12以第一模态扫描受检者16,以及使用第二模态单元14以第二模态扫描受检者16。成像系统10允许采用不同模态的多个扫描以便于提高单模态系统的诊断能力。在一个实施例中,多模态成像系统10是CT/PET成像系统10。可选地,除了CT和PET外的模态与成像系统10一起使用。例如,除了其他外,成像系统10可以是独立CT成像系统、独立PET成像系统、磁共振成像(MRI)系统、超声成像系统、X射线成像系统和/或单光子发射计算机断层摄影(SPECT)成像系统,以及其组合。
第一模态单元12(例如CT成像系统),包括扫描架(gantry)20,其具有朝扫描架20的对侧的检测器阵列24投射x射线束的x射线源22。该检测器阵列24包括成行设置的多个检测器元件(未示出),以及通道,该通道共同感测穿过例如受检者16等对象的投射的x射线。成像系统10还包括计算机30,其接收来自检测器阵列24的投射数据并且处理投射数据来重建受检者16的图像。在操作中,计算机30使用操作者供应的命令和参数来提供控制信号和信息以重新定位电动台架32。更具体地,该电动台架32用于使受检者移到扫描架20内或外。特定地,台架32使受检者16的至少一部分移动通过扫描架开口34进入扫描架孔径(bore)36。
成像系统10还包括对象方位识别系统(OORS)50,其配置成在将受检者16设置在成像系统10内之前和/或当将受检者16设置在成像系统10内时,确定例如受检者16的对象的方位。OORS 50包括至少一个数字摄像机。在示范性实施例中,OORS 50包括多个数字摄像机。例如,OORS 50可包括耦合于扫描架20的第一侧62的第一数字摄像机60和耦合于扫描架20的相对的第二侧66的第二数字摄像机64。在示范性实施例中,第一侧62表示受检者16进入孔径36的进入点并且摄像机60配置成在受检者16移动通过扫描架开口34进入扫描架孔径36之前采集受检者16的图像。此外,摄像机64位于第二侧66上并且可配置成在将受检者安置在扫描架孔径36内时采集受检者16的图像。可选地,扫描架20的第二侧66可表示受检者16进入孔径36的进入点并且摄像机64因此配置成在受检者16移动通过扫描架开口34进入扫描架孔径36之前采集受检者16的图像。此外,摄像机60可配置成在将受检者16安置在扫描架孔径36内时采集受检者16的图像。
因此,并且在示范性实施例中,OORS 50包括至少两个摄像机,一个摄像机用于对进入孔径36的受检者16成像并且第二摄像机用于在将受检者16安置在孔径36内时对受检者16成像。OORS 50还可包括安装在壁72上的摄像机70和安装在相对壁76上的摄像机74。在操作中,摄像机70可配置成采集进入孔径36的受检者16的图像,并且摄像机74可配置成在将受检者16设置在孔径36内时采集受检者16的图像。在另外的实施例中,OORS 50可包括安装在天花板82上的摄像机80和同样安装在天花板82上的摄像机84。在操作中,摄像机80可配置成采集进入孔径36的受检者16的图像并且摄像机84可配置成在将受检者16设置在孔径36内时采集受检者16的图像。在又一个实施例中,OORS 50可包括安装在地板92上的摄像机90和同样安装在地板92上的摄像机94。在操作中,摄像机90可配置成采集进入孔径36的受检者16的图像并且摄像机94可配置成在将受检者16设置在孔径36内时采集受检者16的图像。应该认识到本文描述的摄像机的任何组合和配置可用于采集进入孔径36的受检者16的图像或在将受检者16设置在孔径36内时采集受检者16的图像。
摄像机70、74、80、84、90和94可具体化为配置成采集单个数字图像的摄像机或配置成采集并且存储受检者16的数千个图像的流视频摄像机。更具体地,本文描述的摄像机配置成采集并且存储受检者16的图像。然后可传送存储的图像并且将其存储在远程计算机中,例如,计算机30。从而,各种实施例提供至少一个摄像机,其配置成采集静止图像或移动图像。例如,摄像机中的至少一个可配置成采集多个二维(2D)图像。这些2D图像然后可组合来形成受检者16的三维(3D)图像。此外,摄像机中的至少一个可配置成在预定时间段内采集多个2D图像,例如受检者的流视频。在示范性实施例中,由摄像机采集的图像可由OORS 50利用来根据本文描述的各种实施例进行操作。
此外,应该认识到本文描述的摄像机还可用于进行患者的积极识别。例如,可使用本文描述的任何摄像机采集患者的图片。患者的该图片然后可放置在患者记录中供检查。
另外,本文描述的摄像机可具体化为红外摄像机传感器、x射线检测传感器或摄像机,等等。例如,假设本文描述的摄像机中的至少一个具体化为x射线检测器。在操作中,可在轴向/螺旋诊断扫描之前进行患者的搜索(scout)扫描。从x射线检测器采集的信息然后可用于确定患者的方位。从而,从x射线检测器采集的信息然后可用于在操作者进行诊断扫描之前询问操作者。应该认识到可修改常规的成像系统以利用x射线检测器信息来确定患者的方位。
OORS 50还包括对象方位识别模块(OORM)100。该OORM 100配置成在将受检者16被安置在台架32上时自动确定受检者16的位置。在示范性实施例中,该OORM 100配置成接收由摄像机70、74、80、84、90和94生成的图像来自动确定受检者16的方位。该OORM 100可实现为安装在计算机30中的一件硬件。可选地,该OORM 100可实现为安装在计算机30上的指令集。该指令集可以是独立程序,可作为安装在计算机30上的操作系统中的子程序而包含,可以是计算机30上的安装软件包中的功能,等等。应该理解各种实施例不限于图中示出的设置和工具。
图2是用于确定受检者方位的示范性方法200的流程图。该方法200可具体化为例如存储在计算机30上并且使用OORM 100实现的指令集。在各种实施例中,该方法200确定受检者16的方位并且在受检者16未处于与由操作者手动键入的方位相同的方位时生成视觉指示。
在202,受检者被安置在成像台架上。例如,受检者16可被安置在成像系统10的成像台架32上。可采用仰卧位安置受检者,在仰卧位中他/她背靠台架躺着。可采用俯卧位安置受检者16,在俯卧位中他/她肚靠台架趴着。可采用侧位安置受检者16,在侧位中受检者侧躺在一侧或另一侧上。可采用头向前位安置受检者16,头向前位也称为上位,其中受检者的头安置成在受检者的脚之前进入孔径36。还可采用下位安置受检者16,其中受检者的脚安置成在受检者的头之前进入孔径36。应该认识到上文的位置在本文中也称为受检者方位。如此,方位表示当将受检者设置在台架32上时其物理位置以及受检者相对于成像系统自身的物理位置。
还应该认识到上文描述的受检者方位是示范性的并且可采用本文未描述的其他方位放置在正在成像的受检者。例如,操作者可请求受检者16以仰卧位/上位躺在成像台架32上,其中受检者16安置成面朝上,其中头安置成在脚之前进入扫描架,如在图3中示出的那样。可选地,操作者可请求受检者16处于仰卧位/下位,其中受检者16安置成面朝上,其中脚安置成在头之前进入扫描架孔径,如在图4中示出的那样。可选地,可例如采用俯卧位/上位、俯卧位/下位或任何其他位将受检者16放置在其他成像系统中,受检者16可处于倾斜位、斜倚位或就座位。
再次参照图2,在204,接收指示受检者16在台架32上的方位的输入。在示范性实施例中,该输入由操作者手动键入计算机30并且应该表示受检者在台架32上的方位。例如,操作者可手动键入表示如在图3中示出的受检者16的方位的方位信息或,可手动键入表示如在图4中示出的受检者16的方位的方位信息。
在另一个实施例中,可在不接收操作者的手动输入的情况下实现方法100。更具体地,OORM 100可配置成使用特征识别算法自动确定受检者16的方位。然后可促使操作者确认由OORM 100生成的结果。自动确定的结果然后可用于生成受检者16的图像,该图像包括指示受检者16的方位的标记。
在206,并且在示范性实施例中,进行受检者16的搜索扫描。更具体地,受检者16被移入成像系统10的孔径内。然后进行受检者16的低剂量扫描。更具体地,进行搜索扫描(其可以是侧面或前面/后面(A/P)搜索扫描)来生成搜索图像,其大体上是受检者16的低分辨率图像。搜索扫描图像然后用于识别受检者内的解剖区或标志以在完整成像过程期间细化将被成像的位点。可选地,在步骤206不采集搜索扫描。相反,方法200从步骤204直接前进到步骤208。
在208,自动确定受检者的方位。在示范性实施例中,使用OORS 50自动确定受检者的方位。应该认识到尽管使用摄像机60描述示范性实施例,本文描述的任何摄像机可用于实现方法200。在操作中,摄像机60采集如在图1中示出的那样设置在台架32上的受检者16的至少一个图像102。在示范性实施例中,在将受检者16安置在成像系统10的孔径36内之前采集图像102。因此,在受检者16位于成像系统10外面(例如孔径36外部)时优选地采集图像102。可选地,摄像机60可采集多个图像102,例如,受检者16的流视频。
在操作中,OORM 100作为利用特征识别算法以使用从例如摄像机60接收的图像102自动确定受检者16的方位的特征识别系统而操作。因此,在一个实施例中,图像102是受检者面部的图像并且OORM 100配置成自动进行面部识别分析来确定受检者16是处于仰卧位还是俯卧位以及受检者16是处于上位还是下位。例如,特征识别算法可尝试识别受检者16的鼻、嘴、眼等。可选地,特征识别算法可将在数字图像中采集的特征与已知特征的数据库比较。基于该比较,特征识别算法可输出基于比较的结果或受检者的方位。
在另一个实施例中,图像102是受检者的脚的图像并且OORM 100配置成自动进行脚识别分析来确定受检者16是处于仰卧位还是俯卧位以及受检者16是处于上位还是下位。在其他实施例中,受检者16的其他特征的图像可用于确定受检者16的方位。例如,受检者的手等的图像可用于特征识别分析的数据点。在示范性实施例中,OORM 100具体化为安装在计算机30上的指令集。在操作中,由摄像机60采集的图像102被传送到OORM 100供分析。另外,在步骤202生成的输入也输入OORM 100供分析。
在步骤210,在步骤202由操作者键入的手动方位信息与在步骤208生成的自动特征识别结果比较。更具体地,OORM 100自动分析图像102来确定受检者16的方位。OORM 100然后将自动确定的方位与先前在步骤202由操作者手动输入的方位比较。
例如,在一个实施例中,假设受检者16由操作者采用如在图3中示出的仰卧位/上位安置。此外,假设操作者将指示采用仰卧位/上位安置受检者16的信息手动键入成像系统10。此外,假设在图5中示出的图片250由OORM 100从摄像机60接收。因此,当对图片250进行特征识别分析时,OORM 100可基于受检者的眼、耳、鼻、和/或嘴在图片250以及垂直位中可见的指示自动确定受检者16是采用仰卧位/上位安置。从而,受检者头向前地插入孔径36。OORM 100的结果(例如受检者16处于仰卧方位/上方位)然后与从操作者接收的手动方位输入(例如受检者16处于仰卧方位/上方位)比较。在该实施例中,因为自动特征分析的结果与从操作者接收的手动输入相同,方法前进到步骤212。
作为另一个示例,假设受检者16由操作者采用如在图3中示出的仰卧位/上位安置。此外,假设操作者将指示受检者16采用如在图4中示出的仰卧位/下位安置的信息手动键入成像系统10。进一步假设在图6中示出的图片252由OORM 100从摄像机60接收。因此,当对图片252进行特征识别分析时,OORM 100可基于受检者的眼、耳、鼻、和/或嘴在图片250中以及倒置位中可见的指示自动确定受检者16是采用仰卧位/下位安置。从而,受检者脚向前地插入孔径36。
OORM 100的结果(受检者16处于仰卧方位/下方位)然后与从操作者接收的手动方位输入(即受检者16处于仰卧方位/上方位)比较。在该实施例中,因为自动特征分析的结果与从操作者接收的手动输入不同,在步骤212生成指示,来告知操作者在步骤208生成的自动确定的方位的结果与在步骤202接收的手动输入不同。在一个实施例中,生成视觉指示260(在图8中示出)。该视觉指示260可具体化为光或成像系统显示器332上的文本。可选地,该指示可以是由成像系统10生成的声音指示262(也在图1中示出)。
在一个实施例中,视觉和声音指示260或262用于在步骤202促使操作者输入另一个方位。方法然后重复步骤204-210直到步骤202处的输入与来自步骤208的输出相同。在另一个实施例中,OORM 100配置成自动改变受检者16的方位信息。更具体地,OORM 100自动改变反映在步骤202接收的手动输入的信息来反映在步骤208确定的自动方位的结果。应该认识到由操作者键入的方位信息、由OORM 100生成的方位信息和由摄像机生成的各种图片可每个在显示装置上显示。
在步骤214,对受检者16扫描来生成在图7中示出的图像254。受检者16的该图像254包括方位标记270。在示范性实施例中,该方位标记270基于在步骤208进行的比较。更具体地,该方位标记在图像254上提供受检者16的方位的视觉指示。方位标记270可具体化为字母集,例如“L”和“R”,其分别表示图像的左侧和图像的右侧。应该认识到使用在步骤208自动确定的方位信息确定图像270的左侧和右侧。例如,假设受检者16的方位是仰卧/上,则字母L放置在图像254的左侧并且字母R放置在图像254的右侧,如在图7中示出的那样。可选地,如果在步骤208,自动确定受检者16是处于俯卧位/上位,则字母L放置在图像254的右侧并且字母R放置在图像254的左侧。医生然后可在扫描过程期间利用标记270作为受检者方位的参考并且基于该方位来进行医疗诊断。
本文描述的是配置成自动确定正在成像的受检者的方位的系统10。该系统包括一个或多个摄像机,其安置在CT扫描架上,或采用受检者的面部在摄像机的图像视场内这样的方式安置在其他位点。在操作中,摄像机收集关于受检者特征(例如面部)的数据,并且使用面部特征识别算法识别面部为例如正面向上,或相反。由摄像机收集并且由特征识别模块分析的信息可用于增强操作者的方位信息,或用作操作者的方位信息的替代物。
本文描述的至少一个实施例的技术效果是自动确定正在成像的受检者的方位并且基于该自动确定生成包括反映该自动确定的方位标记的图像。各种实施例还使医生以减少的时间量并以增加的准确度进行医疗诊断的能力提高。
图8是在图1中示出的多模态成像系统10的一部分的方框示意图。在示范性实施例中,如在上文描述的,多模态成像系统10包括第一模态12,即CT成像系统。CT成像系统12包括扫描架20、x射线源22、检测器阵列24、计算机30、台架32和OORS 50。OORS 50包括耦合于OORM 100的至少一个摄像机60。
检测器24包括多个检测器元件310。每个检测器元件310产生电信号,或输出,其表示碰撞X射线束的强度并且因此允许在束穿过受检者16时估计其衰减。在扫描来采集x射线投射数据期间,扫描架20和安装在其上的部件绕旋转312的中心旋转。图8只示出单行的检测器元件310(即,检测器行)。然而,多层检测器阵列24包括检测器元件310的多个平行的检测器行,使得对应于多个层的投射数据可以在扫描期间被同时采集。
扫描架20的旋转和x射线源22的操作由控制机构314支配。该控制机构314包括提供电力和定时信号给x射线源22的x射线控制器320,以及控制扫描架20的旋转速度和位置的扫描架马达控制器322。控制机构314中的数据采集系统(DAS)324从检测器元件310抽样模拟数据并且将数据转化成数字信号供后续处理。例如,后续处理可包括利用OORS 50来自动确定受检者16的方位以及允许在图像上提供标记。图像重建器326从DAS 324接收抽样的且数字化的x射线数据并且进行高速图像重建。重建图像输入计算机30,计算机30将图像存储在存储装置328中。可选地,计算机30可从DAS 324接收抽样的且数字化的x射线数据并且使用OORS 50进行本文描述的各种方法。计算机30还经由具有键盘的控制台330接收来自操作者的命令和扫描参数。各种命令可包括,例如,来自操作者的手动输入,其指示受检者16安置在台架32上的方位。关联的视觉显示单元332允许操作者观察重建图像和来自计算机的其他数据。
操作者供应的命令和参数由计算机30使用来向DAS 324、x射线控制器320和扫描架马达控制器322提供控制信号和信息。另外,计算机30操作台架马达控制器334,其控制电动台架32以将受检者16安置在扫描架20中。特别地,台架32使受检者16的至少一部分移动通过扫描架开口34,如在图1中示出的那样。
再次参照图8,在一个实施例中,计算机30包括装置340,例如,软盘驱动器、CD-ROM驱动器、DVD驱动器、磁光盘(MOD)装置,或任何其他数字装置,其他数字装置包括例如用于从计算机可读介质342(例如软盘、CD-ROM、DVD或例如网络或互联网等其他数字源)读取指令和/或数据的以太网装置等网络连接装置以及其他尚待开发的数字工具。在另一个实施例中,计算机30执行存储在固件(未示出)中的指令。对计算机30编程来进行本文描述的功能,并且如本文使用的,术语计算机不限于只是那些在本领域内称为计算机的集成电路,而泛指计算机、处理器、微控制器、微计算机、可编程逻辑控制器、专用集成电路和其他可编程电路,并且这些术语在本文中能互换地使用。
在示范性实施例中,x射线源22和检测器阵列24随着扫描架20在成像平面内并且绕着要成像的受检者16旋转,使得x射线束344与受检者16相交的角度不断变化。在一个扫描架角度来自检测器阵列24的一组x射线衰减测量(即,投射数据)称为“视图”。受检者16的“扫描”包括在x射线源22和检测器24的一个旋转期间在不同的台架角度或视角得出的一组视图。在CT扫描中,处理投射数据来重建图像,其对应于通过受检者16所获取的二维层。
多模态成像系统的示范性实施例在上文详细描述。图示的多模态成像系统部件不限于本文描述的特定实施例,相反,每个多模态成像系统的部件可独立于本文描述的其他部件或与本文描述的其他部件分开使用。例如,上文描述的多模态成像系统部件还可与其他成像系统结合使用。
如本文使用的,术语“计算机”可包括任何基于处理器或基于微处理器的系统,其包括使用微控制器、精简指令集计算机(RISC)、专用集成电路(ASIC)、逻辑电路以及任何能够执行本文描述的功能的其它电路或处理器的系统。上文的示例只是示范性的,并且从而不意在以任何方式限定术语“计算机”的定义和/或含义。为了处理输入数据,计算机或处理器执行存储在一个或多个存储元件中的指令集。这些存储元件还可根据期望或需要存储数据或其它信息。这些存储元件可采用在处理机内的信息源或物理存储器元件的形式。
指令集可包括各种命令,其指示作为处理机的计算机或处理器执行特定的操作,例如本发明的各种实施例的方法和过程。指令集可采用软件程序的形式。该软件可采用例如系统软件或应用软件或其可以是非暂时性计算机可读介质的各种形式。此外,该软件可采用单独程序的集合、在更大程序内的程序模块或程序模块的一部分的形式。该软件还可包括采用面向对象编程的形式的模块化编程。输入数据由处理机的处理可响应于用户命令,或响应于先前处理的结果,或响应于由另外一个处理机做出的请求。
如本文使用的,以单数列举的并且具有单词“一”在前的元件或步骤应该理解为不排除复数个所述元件或步骤,除非这样的排除被明确地规定。此外,本发明对“一个实施例”的引用不意在解释为排除也包含列举的特征的另外的实施例的存在。此外,除非对相反情况明确规定,“包括”或“具有”具有特定性质的元件或多个元件的实施例可包括不具有该性质的另外的元件。
同样如本文使用的,短语“重建图像”不意在排除其中生成表示图像的数据但不生成可见图像的本发明的实施例。因此,如本文使用的,术语“图像”泛指可见图像和表示可见图像的数据两者。然而,许多实施例生成或配置成生成至少一个可见图像。
如本文使用的,术语“软件”和“固件”是能互换的,并且包括存储在存储器中供计算机执行的任何计算机程序,该存储器包括RAM存储器、ROM存储器、EPROM存储器、EEPROM存储器以及非易失性RAM(NVRAM)存储器。上文的存储器类型只是示范性的,并且从而关于可用于存储计算机程序的存储器类型不是限制性的。
要理解上文的描述意在说明性而非限制性。例如,上文描述的实施例(和/或其方面)可互相结合使用。另外,可做出许多修改以使特定情况或材料适应本发明的教导而没有偏离它的范围。尽管本文描述的材料的尺寸和类型意在限定本发明的参数,它们绝不是限制性的而仅仅是示范性的实施例。当回顾上文的描述时,许多其他的实施例对于本领域内技术人员将是明显的。本发明的范围因此应该参照所附权利要求连同这类权利要求涵盖的完整等效范围而确定。在附上的权利要求中,术语“包含”和“在…中”用作相应术语“包括”和“其中”的易懂语言对等词。此外,在下列权利要求中,术语“第一”、“第二”和“第三”等仅用作标签,并且不意在对它们的对象施加数值要求。此外,下列权利要求的限制没有采用部件加功能格式书写并且不意在基于美国专利法第112条第六款解释,除非并且直到这样的权利要求限制明确地使用短语“用于…的部件”并跟随没有进一步结构的功能陈述。
该书面说明使用示例来公开本发明的各种实施例,其包括最佳模式,并且还使本领域内技术人员能够实践本发明的各种实施例,包括制作和使用任何装置或系统和进行任何包含的方法。本发明的可取得专利的范围由权利要求限定,并且可包括本领域内技术人员想到的其他示例,如果这样的其他示例具有不与权利要求的书面语言不同的结构元件,或者如果它们包括与权利要求的书面语言无实质区别的等同结构元件,则它们意于在权利要求的范围内。
部件列表
| 10 | 成像系统 | 12 | 第一模态单元 |
| 14 | 第二模态单元 | 16 | 受检者 |
| 20 | 扫描架 | 22 | x射线源 |
| 24 | 检测器阵列 | 30 | 计算机 |
| 32 | 台架 | 34 | 扫描架开口 |
| 36 | 孔径 | 50 | OORS |
| 60 | 摄像机 | 62 | 第一侧 |
| 64 | 摄像机 | 66 | 第二侧 |
| 70 | 摄像机 | 72 | 壁 |
| 74 | 摄像机 | 76 | 相对壁 |
| 80 | 摄像机 | 82 | 天花板 |
| 84 | 摄像机 | 90 | 摄像机 |
| 92 | 地板 | 94 | 摄像机 |
| 100 | OORM | 102 | 图像 |
| 200 | 方法 | 202、204、206、208、210 | 在 |
| 310 | 检测器元件 | 312 | 旋转中心 |
| 314 | 控制机构 | 320 | x射线控制器 |
| 322 | 扫描架马达控制器 | 324 | DAS |
| 326 | 图像重建器 | 328 | 存储装置 |
| 330 | 控制台 | 332 | 视觉显示单元 |
| 334 | 台架马达控制器 | 340 | 装置 |
| 342 | 计算机可读介质 |
Claims (12)
1. 一种对象方位识别系统(OORS)(50)包括:
至少一个特征识别装置(60);以及
对象方位识别模块(OORM)(100),其配置成:
接收用户输入,其指示正在成像的受检者的方位;
从所述特征识别装置接收输入,其指示所述受检者的所述方位;
比较所述用户输入与从所述特征识别装置接收的所述输入;以及
生成图像(254),所述图像包括基于所述比较的方位标记(270)。
2. 如权利要求1所述的OORS(50),其中所述至少一个特征识别装置(60)包括耦合于扫描架(20)的外表面的数字摄像机。
3. 如权利要求1所述的OORS(50),其中进一步对所述OORM(100)编程来促使操作者基于所述比较输入第二不同的方位。
4. 如权利要求1所述的OORS(50),其中所述方位标记(270)表示自动确定的方位。
5. 如权利要求1所述的OORS(50),其中进一步对所述OORM(100)编程来确定所述受检者是处于仰卧位、俯卧位、上位还是下位。
6. 如权利要求1所述的OORS(50),其中所述特征识别系统(60)包括面部识别装置,进一步对所述OORM(100)编程以使用所述面部识别装置来自动确定所述受检者的所述方位。
7. 如权利要求1所述的OORS(50),其中所述特征识别系统(60)包括耦合于所述成像系统的外表面的面部识别装置,进一步对所述OORM(100)编程,以使用所述面部识别装置来自动确定在所述受检者移入所述成像系统之前所述受检者的所述方位。
8. 一种用于生成受检者的图像的成像系统(10),所述成像系统包括:
对象方位识别系统(OORS)(50),其包括:
数字摄像机(60),其耦合于所述成像系统的扫描架(20);以及
对象方位识别模块(OORM)(100),其配置成:
接收用户输入,其指示正在成像的受检者的方位;
从所述数字摄像机接收输入,其指示所述受检者的所述方位;
比较所述用户输入与从所述数字摄像机接收的输入;以及
生成图像,所述图像包括基于所述比较的方位标记(270)。
9. 如权利要求8所述的成像系统(10),其中进一步对所述OORM(100)编程以继搜索扫描之后自动确定所述受检者的所述方位。
10. 如权利要求8所述的成像系统(10),其中进一步对所述OORM(100)编程来促使操作者基于所述比较输入第二不同的方位。
11. 如权利要求8所述的成像系统(10),其中所述方位标记(270)表示所述自动确定的方位。
12. 如权利要求8所述的成像系统(10),其中进一步对所述OORM(100)编程来确定所述受检者是处于仰卧位、俯卧位、上位还是下位。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/223,946 | 2011-09-01 | ||
| US13/223,946 US8737705B2 (en) | 2011-09-01 | 2011-09-01 | Method and apparatus for determining a subjects orientation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN102961186A true CN102961186A (zh) | 2013-03-13 |
Family
ID=47116196
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012103205841A Pending CN102961186A (zh) | 2011-09-01 | 2012-09-03 | 用于确定受检者方位的方法和设备 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8737705B2 (zh) |
| JP (1) | JP2013052233A (zh) |
| CN (1) | CN102961186A (zh) |
| DE (1) | DE102012108058A1 (zh) |
| NL (1) | NL2009366C2 (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102525511A (zh) * | 2010-11-27 | 2012-07-04 | 通用电气公司 | 用于在数字放射图像中包括以及校正对象取向数据的系统和方法 |
| CN104123530A (zh) * | 2013-04-27 | 2014-10-29 | 西门子(深圳)磁共振有限公司 | 受检对象姿势检测设备、方法和磁共振成像系统 |
| CN105286796A (zh) * | 2015-10-30 | 2016-02-03 | 上海联影医疗科技有限公司 | 乳腺摄影系统的摄影方法及乳腺摄影系统 |
| CN110507349A (zh) * | 2019-09-03 | 2019-11-29 | 上海联影医疗科技有限公司 | 自动扫描方法、装置、计算机设备和计算机可读存储介质 |
| CN115414115A (zh) * | 2022-09-01 | 2022-12-02 | 上海联影医疗科技股份有限公司 | 一种医学图像的显示校正方法和系统 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103764038A (zh) * | 2012-02-21 | 2014-04-30 | 株式会社东芝 | X射线ct装置、图像显示装置、图像显示方法 |
| JP5918734B2 (ja) | 2013-09-25 | 2016-05-18 | 富士フイルム株式会社 | 医用画像処理装置およびその作動方法並びに医用画像処理プログラム |
| US9633482B2 (en) * | 2014-08-12 | 2017-04-25 | Toshiba Medical Systems Corporation | Apparatus and method for restricting image data visualization |
| WO2016195684A1 (en) * | 2015-06-04 | 2016-12-08 | Siemens Healthcare Gmbh | Apparatus and methods for a projection display device on x-ray imaging devices |
| DE102016210131B4 (de) * | 2016-06-08 | 2023-03-09 | Siemens Healthcare Gmbh | Positionieren eines Untersuchungsobjekts für ein Bildgebungsverfahren |
| EP3533029B1 (en) | 2016-10-25 | 2023-09-13 | Koninklijke Philips N.V. | Device and method for quality assessment of medical image datasets |
| EP3788962A1 (en) | 2019-09-03 | 2021-03-10 | Koninklijke Philips N.V. | X-ray imaging system |
| CN114423349A (zh) * | 2019-09-10 | 2022-04-29 | 富士胶片株式会社 | 图像检测装置、控制台及放射线摄影系统 |
| US11682135B2 (en) | 2019-11-29 | 2023-06-20 | GE Precision Healthcare LLC | Systems and methods for detecting and correcting orientation of a medical image |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2718804C3 (de) | 1977-04-27 | 1979-10-31 | Karlheinz Prof. Dr. 3000 Hannover Renner | Vorrichtung zur PositionierungskontroUe von Patienten und/oder Bestrahlungsquellen |
| US5117829A (en) | 1989-03-31 | 1992-06-02 | Loma Linda University Medical Center | Patient alignment system and procedure for radiation treatment |
| JPH09187453A (ja) * | 1996-01-11 | 1997-07-22 | Ge Yokogawa Medical Syst Ltd | 放射線ct装置 |
| US6055326A (en) * | 1997-06-16 | 2000-04-25 | Lockheed Martin Management | Method for orienting electronic medical images |
| US7206462B1 (en) * | 2000-03-17 | 2007-04-17 | The General Hospital Corporation | Method and system for the detection, comparison and volumetric quantification of pulmonary nodules on medical computed tomography scans |
| US7505809B2 (en) * | 2003-01-13 | 2009-03-17 | Mediguide Ltd. | Method and system for registering a first image with a second image relative to the body of a patient |
| US7352888B2 (en) * | 2004-07-30 | 2008-04-01 | Carestream Health, Inc. | Method for computer recognition of projection views and orientation of chest radiographs |
| JP2006187422A (ja) * | 2005-01-05 | 2006-07-20 | Toshiba Corp | X線コンピュータ断層撮影装置 |
| DE102005036852A1 (de) * | 2005-08-04 | 2007-02-22 | Siemens Ag | Verfahren bzw. "Vorrichtung" zum Ermitteln einer Lage eines Patienten bei einem auf einem medizinischen Bildgebungsverfahren basierenden Erstellen eines Bildes eines Untersuchungsbereichs des Patienten |
| DE102006048425A1 (de) * | 2006-10-12 | 2008-04-17 | Siemens Ag | Verfahren zur Einstellung einer Shimeinrichtung eines Magnetresonanzgeräts |
| US8045771B2 (en) * | 2006-11-22 | 2011-10-25 | General Electric Company | System and method for automated patient anatomy localization |
| US8081811B2 (en) * | 2007-04-12 | 2011-12-20 | Fujifilm Corporation | Method, apparatus, and program for judging image recognition results, and computer readable medium having the program stored therein |
| US8175352B2 (en) * | 2007-09-21 | 2012-05-08 | Siemens Aktiengesellschaft | System and method for automated magnetic resonance scan prescription for optic nerves |
| WO2009067428A1 (en) | 2007-11-19 | 2009-05-28 | Pyronia Medical Technologies, Inc. | Patient positining system and methods for diagnostic radiology and radiotherapy |
| JP5315524B2 (ja) * | 2008-08-05 | 2013-10-16 | 株式会社日立メディコ | 医用画像診断装置 |
| JP5342833B2 (ja) * | 2008-08-29 | 2013-11-13 | 株式会社東芝 | 医用画像診断装置 |
| US20100129005A1 (en) * | 2008-11-26 | 2010-05-27 | General Electric Company | System and method for automated scan planning using symmetry detection and image registration |
| DE102010007654B4 (de) * | 2010-02-11 | 2018-09-06 | Siemens Healthcare Gmbh | Medizinisches Bildaufnahmesystem mit automatischer Aufnahmerichtungserkennung |
| US20110228998A1 (en) * | 2010-03-18 | 2011-09-22 | Vivek Prabhakar Vaidya | System and method for automatic computation of mr imaging scan parameters |
-
2011
- 2011-09-01 US US13/223,946 patent/US8737705B2/en active Active
-
2012
- 2012-08-27 NL NL2009366A patent/NL2009366C2/en active
- 2012-08-28 JP JP2012187108A patent/JP2013052233A/ja active Pending
- 2012-08-30 DE DE102012108058A patent/DE102012108058A1/de not_active Withdrawn
- 2012-09-03 CN CN2012103205841A patent/CN102961186A/zh active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102525511A (zh) * | 2010-11-27 | 2012-07-04 | 通用电气公司 | 用于在数字放射图像中包括以及校正对象取向数据的系统和方法 |
| CN104123530A (zh) * | 2013-04-27 | 2014-10-29 | 西门子(深圳)磁共振有限公司 | 受检对象姿势检测设备、方法和磁共振成像系统 |
| CN105286796A (zh) * | 2015-10-30 | 2016-02-03 | 上海联影医疗科技有限公司 | 乳腺摄影系统的摄影方法及乳腺摄影系统 |
| CN110507349A (zh) * | 2019-09-03 | 2019-11-29 | 上海联影医疗科技有限公司 | 自动扫描方法、装置、计算机设备和计算机可读存储介质 |
| CN115414115A (zh) * | 2022-09-01 | 2022-12-02 | 上海联影医疗科技股份有限公司 | 一种医学图像的显示校正方法和系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013052233A (ja) | 2013-03-21 |
| DE102012108058A1 (de) | 2013-03-07 |
| NL2009366A (en) | 2013-03-04 |
| NL2009366C2 (en) | 2014-10-07 |
| US8737705B2 (en) | 2014-05-27 |
| US20130058545A1 (en) | 2013-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102961186A (zh) | 用于确定受检者方位的方法和设备 | |
| US9424644B2 (en) | Methods and systems for evaluating bone lesions | |
| CN101273919B (zh) | 使用更新方法和系统的连续图像采集 | |
| CN104008540B (zh) | 用于执行医学图像的配准的方法和设备 | |
| KR102148662B1 (ko) | 다중-방식의 이미징 시스템 및 방법 | |
| CN1663530B (zh) | 用于处理图像数据以帮助检测疾病的方法和装置 | |
| CN102473302B (zh) | 用于感兴趣肿瘤区域定义的解剖结构建模 | |
| CN100405973C (zh) | 分析和显示计算机体层摄影术数据的方法 | |
| CN104346821B (zh) | 用于医学成像的自动规划 | |
| AU2016389386B2 (en) | Medical imaging system with a fixed array of X-ray detectors and a fixed array of X-ray emitters for producing a digital 3-dimensional image | |
| US20100021034A1 (en) | System and method for the generation of attenuation correction maps from mr images | |
| CN101006465B (zh) | 横跨时间点链接vois以分析疾病进展或者对治疗的响应的系统和方法 | |
| CN111563523A (zh) | 利用机器训练的异常检测的copd分类 | |
| US20100049032A1 (en) | Method for determining a property map of an object, particularly of a living being, based on at least a first image, particularly a magnetic resonance image | |
| WO2013019985A9 (en) | 2d/3d registration of a digital mouse atlas with x-ray projection images and optical camera photos | |
| CN1748646A (zh) | 医学介入过程计划、位置和导航的介入工具的方法和装置 | |
| CN101023886A (zh) | 用于图像显示至少部分插入检查对象内的医疗器械的方法 | |
| US20080117210A1 (en) | Virtual endoscopy | |
| CN104011773A (zh) | 序列图像采集方法 | |
| KR102258756B1 (ko) | 의료 영상을 이용한 암의 병기 결정 방법 및 의료 영상 분석 장치 | |
| CN102567625A (zh) | 自动肋骨排序和配对 | |
| CN103445801A (zh) | 用于执行衰减校正的方法和系统 | |
| US8331635B2 (en) | Cartesian human morpho-informatic system | |
| US9020215B2 (en) | Systems and methods for detecting and visualizing correspondence corridors on two-dimensional and volumetric medical images | |
| CN114943714A (zh) | 医学图像处理系统、装置、电子设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20130313 |