CN101813552B - 用于补偿试件台面相互作用的地震模拟振动台控制方法 - Google Patents
用于补偿试件台面相互作用的地震模拟振动台控制方法 Download PDFInfo
- Publication number
- CN101813552B CN101813552B CN201010145743XA CN201010145743A CN101813552B CN 101813552 B CN101813552 B CN 101813552B CN 201010145743X A CN201010145743X A CN 201010145743XA CN 201010145743 A CN201010145743 A CN 201010145743A CN 101813552 B CN101813552 B CN 101813552B
- Authority
- CN
- China
- Prior art keywords
- shaking table
- test
- formula
- reacting force
- test specimen
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Buildings Adapted To Withstand Abnormal External Influences (AREA)
Abstract
本发明涉及一种用于补偿试验试件与台面相互作用、提高地震记录再现精度的地震模拟振动台控制方法。该方法在将试件按刚性负载进行振动台控制参数设计的基础上提出了所有负载形式均按零负载进行振动台控制参数设计,此外利用试件产生反力实时补偿试件-台面相互作用的控制方法。与传统控制方法相比:该方法提高了系统控制的稳定性,使得地震模拟振动台更具可控性;扩宽了系统可控频带,使得振动台可进行的试验范围更宽;提高了地震记录再现精度,使得地震模拟振动台试验更具科学性。
Description
技术领域
本发明涉及一种用于补偿试件台面相互作用的地震模拟振动台控制方法,属于建筑结构抗震试验技术领域。
背景技术
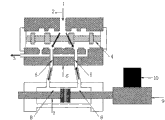
地震模拟振动台控制系统算法设计时通常将台面与试件看作整体以单自由度系统方式处理:图1为地震模拟振动台组要组成架构,以图中伺服阀为研究对象,可建立伺服阀在零工作点附近的线性压力-流量方程,以作动缸为研究对象,可建立作动缸需求流量关系,;以活塞头为研究对象可建立作动器出力平衡方程。以上三个关系式统称为液压系统三连续方程,其表达式如下:
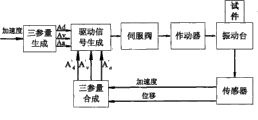
式中kq为流量增益,Kc为流量-压力系数,E为阀驱动信号,Ap为活塞有效面积,xt为活塞、台面位移,V为油缸等效容积,β为油体积弹性模量,pL为油缸内PA与PB间压力差,Cc为活塞总泄系数,Mt为振动台台面总质量,Mp为试验试件总质量。而后利用三参量前馈和三参量反馈作为振动台控制的主要控制算法,主要控制流程如图2。现有控制算法将试件看作台面质量的一部分,按刚性处理,以此求取图2中位移、速度加速度前馈增益(Ad、Av、Aa),位移、速度加速度反馈增益(A′d、A′v、A′a),以此进行地震模拟振动台系统控制,模拟试验试件在实际地震作用中的性能。
这种设计方法使得负载与空台的唯一区别只在于台面质量的增加,可试件与振动台相比二者特性差别较大,常规中小型振动台共振频率在20Hz左右,试验试件一阶频率大都在2~8Hz。因此,将试件与台面统一为一体存在较大偏差,从1988年开始国内外学者相继从理论及试验两方面对试件与台面相互作用进行了研究,结果表明负载在振动台系统中的参与质量比例与频率相关,只有输入波频率小于负载频率时,负载质量才完全作为刚性质量与台面成为一体,因此,负载频率越高参与质量比例也就越高,在大于负载频率3Hz以后的频带范围,负载参与质量不到负载质量的10%。换言之,当输入波频率处在大于负载频率3Hz以后的频带范围时,振动台系统中将不再有负载质量参与,相当于控制空载系统。而且其参与比例随其自振频率的减小而降低,中高频段负载质量很少参与到振动台物理系统中,此时其特性与空载更接近,而常规中小型振动台要求的频率都在50Hz以上,采用刚性负载参数时相当于用一大质量空台参数控制小质量空台,因而当试件质量较大、频率较低时还有可能使得振动台系统不稳定,即不可控状态;此外,试件产生的反力反过来会影响振动台的控制性能,由于共振的影响,试件频率附件的波形产生更大的反力,使得试件频率成为整个振动台系统的第二共振频率,对结构自振频率周围的时程跟踪性能有很大影响,该频率附近的输入波分量再现精度相比其它频率分量低很多;因此研究考虑试件-台面相互作用的振动台控制算法对提高振动台再现地震记录精度具有重要意义。
发明内容
本发明提出了一种能考虑试验试件与台面间相互作用的控制方法,特别是一种用于补偿试件台面相互作用的地震模拟振动台控制方法。该方法利用空载条件下振动台三参量控制参数控制所有试验试件工况;利用实测试验值获取试件对台面的反力,实时补偿试件与台面间相互作用,运用该算法对振动台进行控制具有系统稳定性好、控制精度高、适于试验工况范围广等特点,对基频较高的试验试件同样可以取得较好控制效果,特别是对缩尺比较大的试件在压缩比较大的地震激励作用下的控制效果能有很大幅度提高。
为了实现上述目的,本发明采取了如下技术方案:
一种用于补偿试件台面相互作用的地震模拟振动台控制方法,其为了保证系统稳定性,采用空载系统设计参数控制所有试验试件工况;为了消除试件与台面之间相互作用,通过实测分析得到试件对振动台台面反力,而后经伺服阀逆传函求解得到试件反力等效驱动信号,与原驱动信号叠加,消除二者相互作用,达到提高振动台控制精度的目的。
主要包括以下步骤:
步骤1、根据地震模拟振动台基本设计参数,设计其在没有试验试件条件下的系统控制参数;
步骤2、在空载设计参数控制条件下,通过试验实测、分析得到试验试件对振动台系统的反作用力;
步骤3、求取振动台电液伺服系统逆传递函数;
步骤4、结合实测反力及电液伺服系统逆传函计算试件产生反力的等效驱动信号;
步骤5、将试件反力产生的等效驱动信号与原有驱动信号叠加,得到新的驱动信号,对振动台系统进行控制。
所述步骤1中,在进行地震模拟振动台控制参数设计时,试验试件与振动台台体组成的被控系统同作动器的出力之间的关系由下面的力平衡公式表示:
式中Mt为振动台台面总质量,Mp为试验试件总质量,xt为台面位移,Ap为作动器活塞有效面积,pL为伺服阀产生压差;
令Mp≡0,根据振动台已有或设计硬件参数,运用三参量控制参数常规求取方法,求出位移、速度、加速度输入增益(Ad、Av、Aa),位移、速度、加速度反馈增益(A′d、A′v、A′a)作为任何负载条件振动台的控制参数。
所述步骤2具体为:当振动台作动器反力不可测时,测量试验试件各自由度对应加速度,运用公式 计算试验试件产生的反力,式中mn、
计算试验试件产生的反力,式中mn、 分别为试验试件第n个自由度对应质量和绝对加速度;当振动台作动器反力可测时,直接测量作动器反力,运用公式
分别为试验试件第n个自由度对应质量和绝对加速度;当振动台作动器反力可测时,直接测量作动器反力,运用公式 计算试验试件产生的反力,式中Fact为作动器反力,Mt、
计算试验试件产生的反力,式中Fact为作动器反力,Mt、 分别为振动台台面质量及加速度。
分别为振动台台面质量及加速度。
所述步骤3具体为:计算振动台伺服阀系统逆传函的公式如下:
式中Mt为振动台台面总质量,V为油缸等效容积,β为油体积弹性模量,Kc为流量-压力系数,Cc为活塞总泄系数,Ap为活塞有效面积。
所述步骤4具体为:结合步骤2中的反力值和步骤3中的传递函数综合计算出反力等效驱动信号,其计算公式为:
所述步骤5具体为:新驱动信号计算公式为:
u0=Aded+Avev+Aaea-A′de′d-A′ve′v-A′ae′a-Δu
式中Ad、Av、Aa分别为位移、速度、加速度前馈增益,A′d、A′v、A′a分别为位移、速度、加速度反馈增益,ed、ev、ea分别为三参量算法产生的前馈位移、速度、加速度信号,e′d、e′v、e′a分别为三参量算法中位移、速度、加速度反馈信号。
与现有控制算法相比,本发明的优点如下:
(1)所有负载形式均按零负载进行振动台控制参数设计提高了振动台系统控制稳定性,避免了按刚性负载条件设计的三参量控制参数可能造成的系统失控,甚至使得试验试件在短时间内被毁坏的现象发生,同时提高了控制精度;
(2)利用试件反力实时补偿大大减小了试件与台面相互作用,大大减小了在试件各阶频率附件出现的波峰和波谷,扩宽了系统可控频带,使得振动台可进行的试件缩尺范围、波形压缩范围更宽;提高了地震记录再现精度,使得地震模拟振动台试验更具科学性。
附图说明
图1地震模拟振动台基本硬件组成;
图2地震模拟振动台控制系统组成;
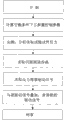
图3本发明方法实现流程图;
图4实时反力补偿控制算法实现架构;
图5使用本发明前后振动台控制性能Bode图。
附图标记:1-进油口;2-阀芯位移;3-出油口;4-阀芯;5-阀孔;6-伺服阀体;7-作动器;8-作动缸腔;9-振动台台体;10-试验试件
具体实施方式
本发明的技术方案参见图3所示,结合相关附图,下面详细介绍本发明的实施步骤:
(1)根据地震模拟振动台基本设计参数,设计其在没有试验试件条件下的系统控制参数:在进行地震模拟振动台控制参数设计时,试验试件与振动台台体组成的被控系统同作动器的出力之间的关系由下面的力平衡公式表示:
式中Mt为振动台台面总质量,Mp为试验试件总质量,xt为台面位移,Ap为作动器活塞有效面积,pL为伺服阀产生压差。
令Mp≡0,根据振动台已有或设计硬件参数,运用三参量控制参数常规求取方法,求出位移、速度加速度输入增益(Ad、Av、Aa),位移、速度加速度反馈增益(A′d、A′v、A′a)作为任何负载条件振动台的控制参数;
(2)在空载设计参数控制条件下,通过试验实测、分析得到试验试件对振动台系统的反作用力:当振动台作动器反力不可测时,测量试验试件各自由度对应加速度,运用公式 计算试验试件产生的反力,式中mn、
计算试验试件产生的反力,式中mn、 分别为试验试件第n个自由度对应质量和绝对加速度;当振动台作动器反力可测时,直接测量作动器反力,,运用公式
分别为试验试件第n个自由度对应质量和绝对加速度;当振动台作动器反力可测时,直接测量作动器反力,,运用公式 计算试验试件产生的反力,式中Fact为作动器反力,Mt、
计算试验试件产生的反力,式中Fact为作动器反力,Mt、 分别为振动台台面质量及加速度;
分别为振动台台面质量及加速度;
(3)求取振动台电液伺服系统逆传递函数:计算振动台伺服阀系统逆传函的公式如下:
式中Mt为振动台台面总质量,V为油缸等效容积,β为油体积弹性模量,Kc为流量-压力系数,Cc为活塞总泄系数,Ap为活塞有效面积;
(4)利用试验实测反力及电液伺服系统逆传函,计算试件产生反力的等效驱动信号:结合步骤2中的反力值和步骤3中的传递函数综合计算出反力等效驱动信号,其计算公式为:
(5)将试件反力产生的等效驱动信号与原有驱动信号叠加,得到新的驱动信号,对振动台系统进行控制,振动台控制架构中的实现如图4所示,新驱动信号计算公式为:
u0=Aded+Avev+Aaea-A′de′d-A′ve′v-A′ae′a-Δu
式中Ad、Av、Aa分别为位移、速度、加速度前馈增益,A′d、A′v、A′a分别为位移、速度、加速度反馈增益,ed、ev、ea分别为三参量算法产生的前馈位移、速度、加速度信号,e′d、e′v、e′a分别为三参量算法中位移、速度、加速度反馈信号
本发明的效果图如图5,可以看出采用该方法后在保证振动台稳定前提下,控制频带得到了明显改善,在保证振动台安全运行的同时提高了控制精度。
最后应说明的是:以上发明内容仅用以说明本发明,而并非限制本发明所描述的技术方案;本发明并非只适用于地震模拟振动台的控制,其他领域振动台涉及的相关相互作用问题的解决均应涵盖在本发明的权利要求范围当中。
Claims (1)
1.一种用于补偿试件台面相互作用的地震模拟振动台控制方法,其特征在于:包括以下步骤:
步骤1、根据地震模拟振动台基本设计参数,设计其在没有试验试件条件下的系统控制参数,具体为,在进行地震模拟振动台控制参数设计时,试验试件与振动台台体组成的被控系统同作动器的出力之间的关系由下面的力平衡公式表示:
式中Mt为振动台台面总质量,Mp为试验试件总质量,xt为台面位移,Ap为作动器活塞有效面积,pL为伺服阀产生压差;
令Mp≡0,根据振动台已有或设计硬件参数,运用三参量控制参数常规求取方法,求出位移、速度、加速度输入增益(Ad、Av、Aa),位移、速度、加速度反馈增益(A′d、A′v、A′ a)作为任何负载条件振动台的控制参数;
步骤2、在空载设计参数控制条件下,通过试验实测、分析得到试验试件对振动台系统的反作用力,具体为,当振动台作动器反作用力不可测时,测量试验试件各自由度对应加速度,运用公式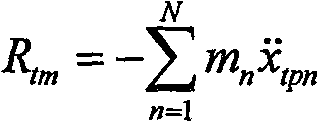 计算试验试件产生的反作用力,式中mn、分别为试验试件第n个自由度对应质量和绝对加速度;当振动台作动器反作用力可测时,直接测量作动器反作用力,运用公式
计算试验试件产生的反作用力,式中mn、分别为试验试件第n个自由度对应质量和绝对加速度;当振动台作动器反作用力可测时,直接测量作动器反作用力,运用公式 计算试验试件产生的反作用力,式中Fact为作动器反作用力,Mt、
计算试验试件产生的反作用力,式中Fact为作动器反作用力,Mt、 分别为振动台台面质量及加速度;
分别为振动台台面质量及加速度;
步骤3、求取振动台电液伺服系统逆传递函数,具体为,计算振动台电液伺服系统逆传递函数的公式如下:
式中Mt为振动台台面总质量,V为油缸等效容积,β为油体积弹性模量,Kc为流量-压力系数,Cc为活塞总泄系数,Ap为活塞有效面积;
步骤4、结合实测反作用力及振动台电液伺服系统逆传递函数计算试件产生反作用力的等效驱动信号,具体为,结合步骤2中的反作用力值和步骤3中的振动台电液伺服系统逆传递函数综合计算出反作用力等效驱动信号,其计算公式为:
步骤5、将试件反作用力产生的等效驱动信号与原有驱动信号叠加,得到新的驱动信号,对振动台系统进行控制,具体为,新驱动信号计算公式为:
u0=Aded+Avev+Aaea-A′de′d-A′ve′v-A′ae′a-Δu
式中Ad、Av、Aa分别为位移、速度、加速度前馈增益,A′d、A′v、A′a分别为位移、速度、加速度反馈增益,ed、ev、ea分别为三参量算法产生的前馈位移、速度、加速度信号,e′d、e′v、e′a分别为三参量算法中位移、速度、加速度反馈信号。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201010145743XA CN101813552B (zh) | 2010-04-09 | 2010-04-09 | 用于补偿试件台面相互作用的地震模拟振动台控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201010145743XA CN101813552B (zh) | 2010-04-09 | 2010-04-09 | 用于补偿试件台面相互作用的地震模拟振动台控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101813552A CN101813552A (zh) | 2010-08-25 |
| CN101813552B true CN101813552B (zh) | 2011-06-08 |
Family
ID=42620867
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201010145743XA Expired - Fee Related CN101813552B (zh) | 2010-04-09 | 2010-04-09 | 用于补偿试件台面相互作用的地震模拟振动台控制方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101813552B (zh) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103278303B (zh) * | 2013-05-22 | 2015-11-04 | 株洲南车时代电气股份有限公司 | 一种轨道交通设备冲击试验波形补偿方法 |
| CN106289693B (zh) * | 2016-08-17 | 2018-08-14 | 西安交通大学 | 一种液压振动系统的低频拓展控制方法 |
| CN107577142A (zh) * | 2017-07-31 | 2018-01-12 | 中国建筑股份有限公司 | 一种大刚度结构试验加载方法 |
| CN107687925B (zh) * | 2017-08-28 | 2020-04-14 | 北京工业大学 | 一种地震模拟振动台控制方法 |
| CN107907283B (zh) * | 2017-12-02 | 2019-07-26 | 北京工业大学 | 一种基于三参量控制amd的振动台子结构试验方法 |
| CN109186910A (zh) * | 2018-10-10 | 2019-01-11 | 东南大学 | 一种用于跨断层地震波的地震模拟振动台试验控制方法 |
| CN110594213B (zh) * | 2019-09-12 | 2024-09-10 | 清华大学 | 可实现长行程高频率加载的电液伺服作动器及控制方法 |
| WO2021046985A1 (zh) * | 2019-09-12 | 2021-03-18 | 清华大学 | 可实现长行程高频率加载的电液伺服作动器及控制方法 |
| CN113820085B (zh) * | 2021-08-12 | 2023-07-07 | 广州大学 | 一种用于地震模拟振动台的加速度分层控制方法 |
| CN115329527B (zh) * | 2022-05-24 | 2025-08-19 | 中国地震局地球物理研究所 | 一种振动台-模型结构相互作用的评估方法 |
| CN115979560A (zh) * | 2022-09-21 | 2023-04-18 | 中国中元国际工程有限公司 | 一种大型振动台基础振动控制方法 |
| CN115638942B (zh) * | 2022-10-18 | 2025-09-23 | 中国地震局地球物理研究所 | 考虑激振器耦合作用的振动台-偏心负载相互作用补偿方法 |
| CN115655614B (zh) * | 2022-10-18 | 2025-10-24 | 中国地震局地球物理研究所 | 一种双振动台台阵和试验结构相互作用影响分析方法 |
| CN115618467B (zh) * | 2022-10-18 | 2024-12-13 | 中铁大桥局集团有限公司 | 振动台迭代学习控制方法及其存储介质和电子设备 |
| CN115962906A (zh) * | 2022-11-22 | 2023-04-14 | 中国地震局地球物理研究所 | 一种振动台与试验结构系统的时域波形复现策略试验验证方法 |
| CN117990324B (zh) * | 2024-04-03 | 2024-06-07 | 实链检测(浙江)有限公司 | 一种地震模拟台试验方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3425365B2 (ja) * | 1998-06-25 | 2003-07-14 | 株式会社 日立インダストリイズ | 構造物の試験装置及び試験方法 |
| CN1300599C (zh) * | 2004-11-29 | 2007-02-14 | 四川大学 | 弹簧式地震模拟振动台 |
| CN100428091C (zh) * | 2006-10-20 | 2008-10-22 | 北京工业大学 | 基于dsp的可变谐振频率液压振动控制系统及方法 |
| JP2008281511A (ja) * | 2007-05-14 | 2008-11-20 | Ihi Corp | 振動台試験装置 |
-
2010
- 2010-04-09 CN CN201010145743XA patent/CN101813552B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101813552A (zh) | 2010-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101813552B (zh) | 用于补偿试件台面相互作用的地震模拟振动台控制方法 | |
| Yu et al. | Guided waves in functionally graded viscoelastic plates | |
| Liu et al. | Present status and prospect of high-frequency electro-hydraulic vibration control technology | |
| Kumar et al. | Accurate dynamic response of laminated composites and sandwich shells using higher order zigzag theory | |
| CN106371311A (zh) | 一种无杆气缸位置伺服系统的自抗扰控制方法 | |
| CN107907283A (zh) | 一种基于三参量控制amd的振动台子结构试验方法 | |
| CN107687925A (zh) | 一种地震模拟振动台控制方法 | |
| Ying-chun et al. | Nonlinear analysis of consolidation with variable compressibility and permeability | |
| CN102147322A (zh) | 一种用于考虑土结相互作用的多维多点抗震实验方法 | |
| Lu et al. | Variable-parameter feedforward control for centrifuge shaking table based on nonlinear frequency characteristic model | |
| Mondal et al. | Dynamic instability of damped composite plates with embedded delaminations | |
| CN104535423B (zh) | 动静三轴试验机饱和及非饱和体变测量控制方法 | |
| CN110361150A (zh) | 一种六自由度电液振动台自抗扰控制方法 | |
| Zhang et al. | Finite element dynamic modeling and vibration reduction analysis of the double-lap bolted thin plate with partially attached constrained layer damping | |
| Phillips et al. | Model-based framework for real-time dynamic structural performance evaluation | |
| Cheng et al. | System response modeling of HMCVT for tractors and the comparative research on system identification methods | |
| Su et al. | Local stability of glued laminated bamboo columns with box sections under axial compression | |
| CN115327895B (zh) | 用于补偿振动台-偏心负载相互作用的控制方法 | |
| Yang et al. | Acceleration waveform reproduction control of hypergravity centrifugal shaking table based on data driven iterative learning control and two-degree-of-freedom control | |
| Peng et al. | Development of a double-layer shaking table for large-displacement high-frequency excitation | |
| CN101819084A (zh) | 电液式振动模拟台自适应谐波抑制方法 | |
| CN115655614B (zh) | 一种双振动台台阵和试验结构相互作用影响分析方法 | |
| CN117536956A (zh) | 用于煤层气排采模拟试验的多液压缸同步控制方法与系统 | |
| CN109406258A (zh) | 基于多传感器的振动幅度加权控制方法 | |
| CN115793451A (zh) | 多物理场耦合试验装置及控制算法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20110608 Termination date: 20130409 |