Pneumatic ball kicking system of football robot
Technical field
The present invention relates to a kind of Soccer robot ball kicking system, specifically is a kind of device of playing football when being used for the Soccer robot contest and shooting.
Background technology
RoboCup robot world Cup be worldwide largest, level is the highest, influence robot science and technology race the most widely, and medium-sized group of Soccer robot contest is as one of them event, the forward position research and the technology of numerous areas such as structure, theory, application that relates to artificial intelligence, robotics, communication, sensing, intelligent body is integrated, characteristics with full independence, intelligent, antagonism, real-time, distributed control etc., have more challenge, also more can reflect the robot research strength of a country.Popularization along with robot soccer competition, every correlation technique makes constant progress, and wherein the quality of a key technology ball kicking system performance directly affects the victory or defeat of match, the therefore key of winning victory as match, and ball kicking system is that every team falls over each other to develop improved sport technique segment.
The custom of copying the mankind to play football, the mode of playing football have two kinds in ground ball and high-altitude ball.From the real racetrack situation, because the restriction of goalkeeper's vision technique, the score possibility of high-altitude ball is spin above Ground; And (as pass) utilization is more in the technique and tactics cooperation of ground ball between each team member of robot, therefore as the integrity of ball kicking system, requires ball-kicking device can play the high-altitude ball again by grubber kick.Ball kicking system must be kicked out of the ball of different dynamics according to robot from the distance at goal simultaneously.
According to retrieval to prior art, find that Chinese invention patent (patent No. 200310108896.7) discloses a kind of Soccer robot and played football and keep mechanism, this football-kicking mechanism mainly comprises rain shaving electrical machine, inclined to one side gear, push rod, rubber band etc., rain shaving electrical machine rotates and drives inclined to one side wheel and rack disengaging when playing football, the rubber band abrupt release energy of tensioning promotes push rod and plays football fast, make push rod be in energy accumulating state once more with retrodeviating gear, finish one and play football the cycle.This football-kicking mechanism does not have high-altitude ball function; Simultaneously owing to adopt the rack-and-pinion engagement, in the very large robot soccer competition of antagonism intensity, generally all there is barrier in robot the place ahead, perhaps football is blocked by the other side robot, if this moment, robot inspired the striking action instruction, then football can not be kicked out of smoothly, is easy to cause rack-and-pinion stuck like this, plays football next time thereby influence.
The disclosed Soccer robot ball-kicking device of Chinese patent (patent No. 01258718.4) comprises motor, reduction box, unidirectional travelling gear and lifts pin mechanism, football-kicking mechanism, folder ball mechanism.This football-kicking mechanism is played football forward by its bar of playing football plate that promotes to play football, and rollback is waited for next time and played football again.Though also can play the high-altitude ball, ball chuck firmly need be raised just and can be kicked out of the high-altitude ball, therefore it is big to play high-altitude ball difficulty, is not easy to realize; Rule is not played after not allowing mechanism that ball chuck is firmly raised again in real racetrack simultaneously, therefore is not suitable for applying to robot soccer competition.
Comprise base plate, football-kicking mechanism, the board component of playing football in the disclosed a kind of Soccer robot ball-kicking device of Chinese patent (patent No. 200720063296.7).This device can be played ground ball can play the high-altitude ball again, when playing the high-altitude ball, and the plate layback that needs to play football of this device.Robot could judge that according to situation on the competition field grubber kick still is the high-altitude ball after taking ball during match, and the action of the plate layback of playing football this moment will cause football to be pushed away, thereby is difficult to protect ball again and finish and play the high-altitude ball.Therefore be difficult to apply to robot soccer competition.
The ball-kicking device that above-mentioned document relates to all can not be regulated the dynamics of playing football, and mechanism's complexity, and difficulty is installed, and high-altitude ball implementation method is undesirable simultaneously, is not suitable for actual robot soccer competition.Require very high robot soccer competition for movement velocity simultaneously, robot weight is had certain requirement, and the ball-kicking device based on electromagnet commonly used now because the electromagnet quality is big, has influenced robot mass motion performance to a great extent; For the electromagnet that obtains the roundhouse kick action by the high pressure energising, instantaneous pressure disturbs very big to other circuit of robot simultaneously.
Summary of the invention
The objective of the invention is to deficiency at existing ball playing skill, propose a kind of light weight, simple in structure, can regulate the dynamics of playing football, not only can grubber kick but also can play the Pneumatic ball kicking system of football robot of high-altitude ball.
The present invention is achieved by the following technical solutions, the present invention includes: frame, horizontal sliding ball skirt, toe lift skirt, cylinder, horizontal sliding skirt, toe lift skirt flexibly connect with the frame top respectively, and cylinder one end is connected with the horizontal sliding skirt, and the other end is connected with frame.
Described frame comprises the bracing frame be made up of two planar side plates that are arranged in parallel and the pedestal at bracing frame place.
Horizontal sliding ball skirt one end and bracing frame top flexibly connect, and the other end is provided with motor, and the output shaft of this motor is provided with rotary cutting somebody's hair.
Toe lift skirt one end and bracing frame top flexibly connect, the other end is connected with the toe lift skirting board, wherein: the toe lift skirt is made up of two strip pieces that are parallel to each other, form a cavity that allows horizontal sliding ball skirt to pass through between them, the strip block edge is provided with the flanging towards cavity inside, the width in the space between the flanging is less than rotary Breadth Maximum of cutting somebody's hair, and greater than rotary minimum widith of cutting somebody's hair.
Cylinder comprises cylinder take-off lever, two air pipe interfaces, and cylinder one end and pedestal flexibly connect, and the other end flexibly connects by cylinder take-off lever and the horizontal sliding ball skirt that stretches out from cylinder inner cavity; The base of cylinder take-off lever is divided into two isolated mutually cavitys with cylinder inner cavity, and cylinder is connected an end cavity with pedestal outer wall is provided with the air pipe interface that is communicated with inner chamber, and another cavity outer wall is provided with another air pipe interface that is communicated with cavity.
Cylinder connects pressure control loop, the action of cylinder is controlled by pressure control loop, pressure control loop comprises: two-position-five-way solenoid valve, two-position three way magnetic valve, some tracheaes, gas bomb, two air pipe interfaces on the cylinder in two-position-five-way solenoid valve and the Pneumatic ball kicking mechanism are connected, and two-position-five-way solenoid valve, two-position three way magnetic valve, high-pressure air source are linked in sequence.Reaching control by the control pressure control loop and enter gas in cylinder two cavitys, make two cavitys produce pressure differential, stretch out or return cylinder inner cavity thereby promote the cylinder take-off lever, thereby promote Pneumatic ball kicking mechanism, specifically is to promote the motion of horizontal sliding ball skirt.
Compared with prior art, the invention has the beneficial effects as follows: Pneumatic ball kicking system promotes Pneumatic ball kicking mechanism and finishes whole striking action by air pressure in the pressure control loop control cylinder.Regulate the strength of playing football by control gas control loop, make ball kicking system promptly can play the high-altitude ball again by grubber kick by special design.Owing to adopt pressure control loop, make that the weight of whole ball kicking system is lighter simultaneously, and can not produce electromagnetic interference other circuit of robot as dynamical system.Generally speaking, the present invention is simple in structure, is easy to realize ground ball and high-altitude ball, and has than light weight, can greatly improve the competitive ability of Soccer robot, the ability of especially playing football and locomotivity.
Description of drawings
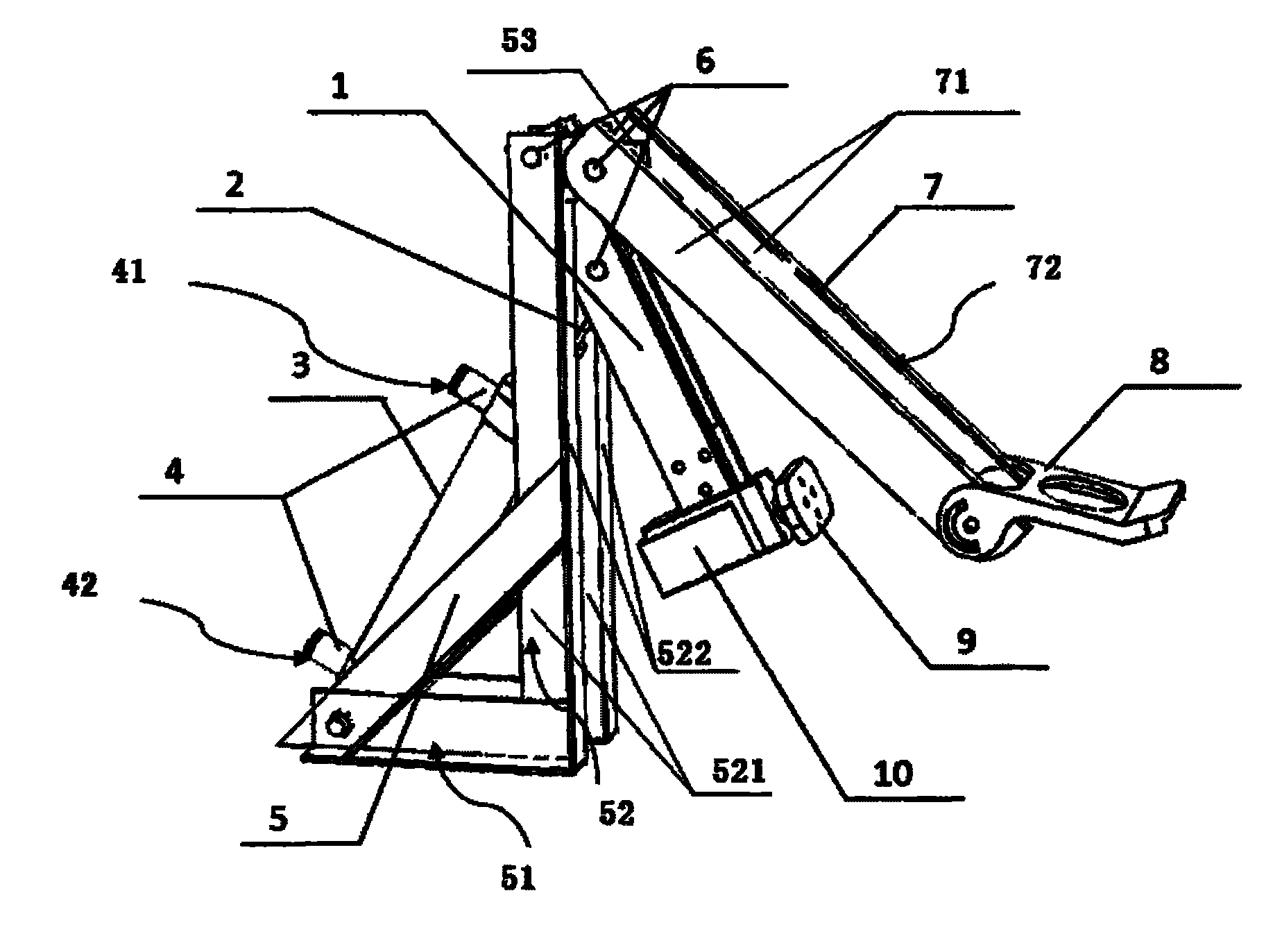
Fig. 1 is a schematic perspective view of the present invention;
Fig. 2 the present invention realizes the action schematic diagram of ground ball;
Fig. 3 the present invention realizes the action schematic diagram of high-altitude ball;
Fig. 4 is a pressure control loop schematic diagram of the present invention.
The specific embodiment
Below in conjunction with accompanying drawing embodiments of the invention are elaborated: present embodiment has provided detailed embodiment and process being to implement under the prerequisite with the technical solution of the present invention, but protection scope of the present invention is not limited to following embodiment.
As shown in Figure 1, present embodiment comprises: horizontal sliding ball skirt 1, cylinder 3, frame 5, toe lift skirt 7, horizontal sliding skirt 1, toe lift skirt 7 flexibly connect with frame 5 tops respectively, and cylinder 3 one ends are connected with horizontal sliding skirt 1, and the other end is connected with frame 5.
Frame 5 comprises: pedestal 51, be positioned at bracing frame 52 and auxiliary frame 53 on the pedestal 51, bracing frame 52 is made up of two planar side plates that are arranged in parallel 521, form to allow between the planar side plates 521 horizontal sliding ball skirt 1 by or be contained in wherein cavity, the edge of a side of the direction of motion was provided with perpendicular to planar side plates 521 outwardly directed flangings 522 when planar side plates 521 was externally played football near horizontal sliding ball skirt 1, the distance of 522 liang of far-ends of this flanging is greater than the width along the direction of motion of toe lift skirt, and this flanging 522 can limit the opposite side that toe lift skirt 7 is crossed support.
Horizontal sliding ball skirt 1 one ends and bracing frame 52 tops flexibly connect, and the other end is provided with motor 10, are fixed with on the output shaft of this motor rotaryly to cut somebody's hair 9.
Toe lift skirt 7 one ends and auxiliary frame 53 flexibly connect, the other end is connected with toe lift skirting board 8, wherein: toe lift skirt 7 comprises two strip pieces 71 that are parallel to each other, form a cavity that allows horizontal sliding ball skirt 1 to pass through between them, strip piece 71 edges are provided with the flanging 72 towards cavity inside, gap length between the flanging 72 is less than rotary 9 the Breadth Maximum of cutting somebody's hair, and greater than rotary 9 the minimum widith of cutting somebody's hair.
As shown in Figure 4, cylinder 3 comprises cylinder take-off lever 2, air pipe interface 41,42, and cylinder 3 one ends and pedestal 51 flexibly connect, and the other end flexibly connects with horizontal sliding ball skirt 1 by the cylinder take-off lever 2 that stretches out from cylinder 3 inner chambers; The base of cylinder take-off lever 2 is divided into two isolated mutually cavitys 33,34 with cylinder inner cavity, cylinder is connected an end cavity 34 outer walls and is provided with the air pipe interface 42 that is communicated with cavity 34 with pedestal, another cavity 33 outer walls are provided with the air pipe interface 41 that is communicated with cavity 33.
As shown in Figure 4, cylinder connects pressure control loop, the action of cylinder is controlled by pressure control loop, pressure control loop comprises: two-position-five-way solenoid valve 11, two-position three way magnetic valve 12, some tracheaes 13, gas bomb 14, two-position-five-way solenoid valve 11 is provided with interface 111, interface 112, interface 113, interface 114, interface 115, two-position three way magnetic valve 12 is provided with interface 121, interface 122, interface 123, its annexation is: the air pipe interface 41 on the cylinder 3 in the Pneumatic ball kicking mechanism, 42 by tracheae 13 respectively with two-position-five-way solenoid valve 11 on interface 112,114 connect; Interface 111 on the two-position-five-way solenoid valve 11 links to each other with interface 122 on the two-position three way magnetic valve 12 by tracheae 13; Interface 121 on the two-position three way magnetic valve 12 is connected with gas bomb 14 by tracheae 13.
The course of work of present embodiment is as follows:
When robot is in non-competitive state, gas is ended by the interface on the two-position three way magnetic valve 12 121 in the gas bomb 14, prevent that gas from leaking, comprise in the whole gas circuit and all do not have air pressure in the cylinder 3, thereby make whole football-kicking mechanism in the raw, make things convenient for the experimenter that relevant parts are adjusted and keeped in repair.
When robot is in competitive state, can be divided into SBR and the state of playing football.
During SBR: conduct interface 121, interface 122 conductings on the two-position three way magnetic valve 12.This moment interface 121, the interface 122 of gas sequential flow on two-position three way magnetic valve 12 in the gas bomb 14, interface 111 on the two-position-five-way solenoid valve 11, interface 112 enter the cavity 33 of cylinder 3 at last, draught head by cavity 33 and 34 makes the cylinder take-off lever 2 of cylinder 3 be in contraction state, and this moment, whole football-kicking mechanism was in the contraction impaction state.
When playing football state: when robot plays football, conduct on the two-position-five-way solenoid valve 11, two-position-five-way solenoid valve 11 transposition work, interface 111, interface 114 conductings, gas process gas return path in the air accumulator 14 enters the cavity 34 in the cylinder 3 fast, gas in the cavity 33 in the cylinder 3 is then via gas interface 41, and order is discharged by the interface 112 and the interface 113 of two-position-five-way solenoid valve 11; The quick cylinder take-off lever 2 that promotes stretched out cylinder 3 after cavity in the cylinder 3 34 obtained air pressure at this moment, the power of playing football was provided for Pneumatic ball kicking mechanism.
After having played ball, two-position-five-way solenoid valve 11 power-off resets, interface 112, interface 111 conductings, the gas process gas return path in the air accumulator enters the cavity 33 in the cylinder 3, make in the cylinder take-off lever 2 withdrawal cylinders 3 and be returned to the initial contraction state, finish one and play football the cycle.
Be in when playing football state, can realize ground ball and high-altitude ball respectively by adjusting Pneumatic ball kicking mechanism.
Ground ball implementation procedure: as shown in Figure 2, beginning to enter when playing football state, at first control motor 10 rotary cutting somebody's hair 9 turned to a certain angle, vertical position normally, horizontal sliding this moment ball skirt 1 and be fixed thereon rotary cut somebody's hair 9 can be freely space by formation between the flanging 72 of toe lift skirt 7.Make cylinder take-off lever 2 stretch out cylinder 3 fast by the control pressure control loop then and promote the horizontal sliding ball skirt 1 drive rotary 9 outside rapidly motions of cutting somebody's hair fixed thereon and play football, because rotary cutting somebody's hair 9 do not stopped by the flanging 72 of toe lift skirt 7, horizontal sliding ball skirt 1 can freely pass through the space between this flanging 72, thereby realizes ground ball.After striking action is finished, by the control pressure control loop Pneumatic ball kicking mechanism is returned to original state, thereby finish a ground ball cycle.
High-altitude ball implementation procedure: as shown in Figure 3, beginning to enter when playing football state, at first controlling motor 10 rotates and rotaryly cuts somebody's hair 9 to a certain angle, horizontal level normally, horizontal sliding this moment ball skirt 1 and rotary the cutting somebody's hair that is fixed thereon 9 can not be by the spaces of formation between the flanging 72 of toe lift skirt 7.Make cylinder take-off lever 2 stretch out cylinder 3 fast by the control pressure control loop then and promote the 9 rapidly outwards motions of cutting somebody's hair of horizontal sliding ball skirt 1 driven rotary formula, because rotary cutting somebody's hair 9 stop by the flanging 72 of toe lift skirt 7, thereby rotary cutting somebody's hair 9 will promote flanging 72 and drive toe lift skirts 7 and outwards move.In outside motion process, when the toe lift skirting board 8 on the toe lift skirt 7 touches football, will provoke football and dish out, thereby realize the high-altitude ball toward oblique upper.After striking action is finished, by the control pressure control loop football-kicking mechanism is returned to original state, thereby finish a high-altitude ball cycle.
In said process, if change the ON time that powers on of two-position-five-way solenoid valve 11, promptly the gas flow by control inflow cylinder 3 cavities 34 just can control to adjust the strength of playing football.