CN100594837C - Capsule type medical device - Google Patents
Capsule type medical device Download PDFInfo
- Publication number
- CN100594837C CN100594837C CN200580036822A CN200580036822A CN100594837C CN 100594837 C CN100594837 C CN 100594837C CN 200580036822 A CN200580036822 A CN 200580036822A CN 200580036822 A CN200580036822 A CN 200580036822A CN 100594837 C CN100594837 C CN 100594837C
- Authority
- CN
- China
- Prior art keywords
- medical device
- capsule
- type medical
- electrode
- electrodes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000002775 capsule Substances 0.000 title claims abstract description 291
- 230000000638 stimulation Effects 0.000 claims abstract description 82
- 238000001727 in vivo Methods 0.000 claims abstract description 55
- 238000004891 communication Methods 0.000 claims abstract description 6
- 239000000463 material Substances 0.000 claims description 17
- 210000001519 tissue Anatomy 0.000 description 78
- 210000000813 small intestine Anatomy 0.000 description 64
- 210000000056 organ Anatomy 0.000 description 51
- 238000003860 storage Methods 0.000 description 51
- 210000002429 large intestine Anatomy 0.000 description 44
- 230000004048 modification Effects 0.000 description 34
- 238000012986 modification Methods 0.000 description 34
- 239000012530 fluid Substances 0.000 description 32
- 230000008602 contraction Effects 0.000 description 30
- 210000000436 anus Anatomy 0.000 description 27
- 210000002784 stomach Anatomy 0.000 description 24
- 230000006870 function Effects 0.000 description 23
- 238000002347 injection Methods 0.000 description 20
- 239000007924 injection Substances 0.000 description 20
- 230000007246 mechanism Effects 0.000 description 20
- 230000033001 locomotion Effects 0.000 description 18
- 230000008859 change Effects 0.000 description 17
- 229920001971 elastomer Polymers 0.000 description 16
- 238000001514 detection method Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 13
- 238000004804 winding Methods 0.000 description 12
- 238000003780 insertion Methods 0.000 description 11
- 230000037431 insertion Effects 0.000 description 11
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 11
- 238000010438 heat treatment Methods 0.000 description 10
- 238000003384 imaging method Methods 0.000 description 10
- 230000009747 swallowing Effects 0.000 description 10
- 210000001198 duodenum Anatomy 0.000 description 9
- 210000001035 gastrointestinal tract Anatomy 0.000 description 9
- 230000008855 peristalsis Effects 0.000 description 9
- 238000012545 processing Methods 0.000 description 9
- WABPQHHGFIMREM-OIOBTWANSA-N lead-204 Chemical compound [204Pb] WABPQHHGFIMREM-OIOBTWANSA-N 0.000 description 8
- 239000002250 absorbent Substances 0.000 description 7
- 230000036760 body temperature Effects 0.000 description 7
- 239000000470 constituent Substances 0.000 description 7
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 7
- 229920002472 Starch Polymers 0.000 description 6
- 229910045601 alloy Inorganic materials 0.000 description 6
- 239000000956 alloy Substances 0.000 description 6
- 210000004211 gastric acid Anatomy 0.000 description 6
- 230000000968 intestinal effect Effects 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 210000004400 mucous membrane Anatomy 0.000 description 6
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 6
- 235000019698 starch Nutrition 0.000 description 6
- 239000008107 starch Substances 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 206010061876 Obstruction Diseases 0.000 description 4
- 230000009471 action Effects 0.000 description 4
- 230000005489 elastic deformation Effects 0.000 description 4
- 238000005286 illumination Methods 0.000 description 4
- 238000007689 inspection Methods 0.000 description 4
- 210000000936 intestine Anatomy 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 239000004033 plastic Substances 0.000 description 4
- 229920003023 plastic Polymers 0.000 description 4
- 210000000664 rectum Anatomy 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 4
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 239000003814 drug Substances 0.000 description 3
- 229940079593 drug Drugs 0.000 description 3
- 239000000806 elastomer Substances 0.000 description 3
- 230000036541 health Effects 0.000 description 3
- 230000004118 muscle contraction Effects 0.000 description 3
- 230000002572 peristaltic effect Effects 0.000 description 3
- 229910052697 platinum Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 229910052719 titanium Inorganic materials 0.000 description 3
- 239000010936 titanium Substances 0.000 description 3
- 239000004604 Blowing Agent Substances 0.000 description 2
- 206010005908 Body temperature conditions Diseases 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 2
- 230000002745 absorbent Effects 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 2
- -1 alkoxy vinyl ether Chemical compound 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 230000000740 bleeding effect Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 239000013013 elastic material Substances 0.000 description 2
- 238000005401 electroluminescence Methods 0.000 description 2
- 230000001747 exhibiting effect Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 239000004088 foaming agent Substances 0.000 description 2
- 238000011835 investigation Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 210000004798 organs belonging to the digestive system Anatomy 0.000 description 2
- 239000002861 polymer material Substances 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920002379 silicone rubber Polymers 0.000 description 2
- 239000004945 silicone rubber Substances 0.000 description 2
- 230000002966 stenotic effect Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- 229920001875 Ebonite Polymers 0.000 description 1
- 102000004190 Enzymes Human genes 0.000 description 1
- 108090000790 Enzymes Proteins 0.000 description 1
- 102000001554 Hemoglobins Human genes 0.000 description 1
- 108010054147 Hemoglobins Proteins 0.000 description 1
- 241000167880 Hirundinidae Species 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 208000037062 Polyps Diseases 0.000 description 1
- 239000004809 Teflon Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- 239000011358 absorbing material Substances 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 229920001577 copolymer Polymers 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000002496 gastric effect Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 210000003767 ileocecal valve Anatomy 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 210000001835 viscera Anatomy 0.000 description 1
Images





































































Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
- Endoscopes (AREA)
Abstract
A capsule type medical device (1) is of a type of a capsule type medical device that is introduced inside the living body to gather in-vivo information, and comprises a capsule shaped casing (1); an in-vivo information acquisition device (2) for acquiring the in-vivo information; a communication device (4) for sending the in-vivo information acquired by the in-vivo information acquisition device to outside of the living body by wireless; at least one pair of first electrodes (6) provided in a vicinity of one end along an axis of the casing for giving electric stimulation to body tissue in theliving body; a first current control device (3) for sending current to the first electrodes; and an interelectrode distance variation device (7) for changing a distance between the electrodes.
Description
Technical Field
The present invention relates to a capsule type medical device for observing a living body, and more particularly, to a device which moves within a living body by supplying an electrical stimulus to a body tissue, thereby making it possible to observe a desired position.
Background
As a method of examining the health condition of a person under examination, a method of medical examination or observation such as using an endoscope is widely known. Further, an inspection method using a capsule-type medical device in which an inspection device shaped into a capsule shape is introduced into a living body to perform an easy physical condition inspection is known (for example, see japanese unexamined patent application, first publication No. 2003-135388). Various types of capsule type medical devices similar to the above-described devices can be utilized, one of which is an electric propulsion type device in which local electric stimulation is provided to body tissue through electrodes and then moved in vivo by contraction of the body tissue (see, for example, PCT international publication No. wo 01/08548, and U.S. patent application publication No. 2003/0125788).
Generally, a capsule type medical device naturally moves within an alimentary canal by peristalsis of a luminal organ such as a small intestine when introduced into a living body. However, the electrically-propelled capsule type medical device advances a forward movement or a movement in the opposite direction by providing local electrical stimulation to a body tissue such as a luminal organ, thereby causing a contraction motion (causing forced peristalsis or local muscle contraction) different from a natural (autonomous) peristalsis for the body tissue. This makes it possible to quickly reach the position to be observed or to perform detailed observation at one position. Thus, an effective observation is achieved.
In the capsule type medical device disclosed in PCT international publication No. wo 01/08548, in order to cope with a change in the diameter of a luminal organ, an electrode is provided in an inflatable balloon. However, in this device, it is necessary to inflate the balloon by blowing a fluid such as air into the capsule-type medical device from the outside of the living body using a tube or the like. Therefore, a relatively large tube is required to insufflate the fluid into the balloon, which makes it difficult to deploy the device in vivo. Moreover, the person under examination often feels uncomfortable or inconvenient. Furthermore, if the tube becomes stuck (stuck) within the luminal organ, the stable advancement of the capsule-type medical device may be interrupted. Further, in the capsule type medical device disclosed in PCT international publication No. wo 01/08548, a detailed description is not given about the structure and mechanism of the power source that supplies power to the electrodes, and thus further improvement is clearly required.
In the capsule type medical device disclosed in the specification of U.S. patent application publication 2003/0125788, the problem of the change in the diameter of the luminal organ is solved by mounting an electrode for electrical stimulation on a flap (flap) that can swing and then opening the flap by using an inflatable balloon. However, similarly to the model disclosed in japanese unexamined patent application, first publication No.2003-135388, a tube is required to blow air or the like to inflate the airbag. In addition, even in the case of opening the wings to the maximum size, the distance between the electrodes is about the same as the diameter of the balloon, and therefore, the following problems occur: the device obviously cannot be used in luminal organs with a diameter larger than the diameter of the balloon.
Disclosure of Invention
The capsule type medical device of the present invention is a capsule type medical device which is introduced into a living body to collect information in the living body, the capsule type medical device including: a capsule-shaped housing; in-vivo information acquisition means for acquiring the in-vivo information; communication means for wirelessly transmitting the in-vivo information acquired by the in-vivo information acquisition means to the outside of the living body; at least one pair of first electrodes disposed near one end along the axis of the housing for providing electrical stimulation to body tissue in the living body; a first current control device for supplying a current to the first electrode; and first inter-electrode distance changing means for changing a distance between the first electrodes.
According to the capsule type medical device of the present invention, since the capsule type medical device has the inter-electrode distance changing means, the electrodes are accurately brought into contact with the body tissue and the electrical stimulation is provided. Therefore, the contraction motion of the body tissue is accurately achieved, which enables stable advancement of the capsule-type medical device.
In the capsule-type medical device of the present invention, it is preferable that the maximum distance between the first electrodes that can be changed by the first interelectrode distance changing means be set to at least twice the outer diameter of the housing.
According to the capsule type medical device of the present invention, the electrode is accurately brought into contact with the luminal organ having a diameter significantly larger than that of the housing.
Preferably, the capsule type medical device of the present invention further comprises: at least one pair of second electrodes provided near the other end along the axis of the housing and located at positions not coincident with the in-vivo information acquisition device, for providing electrical stimulation to the body tissue; a second current control means for supplying a current to the second electrode; and second inter-electrode distance changing means for changing a distance between the second electrodes.
According to the capsule type medical device of the present invention, the currents to be supplied to the first electrode and the second electrode can be controlled independently of each other, and therefore, the capsule type medical device can be freely moved forward and backward. In other words, the capsule type medical device moves forward due to the electrical stimulation supplied to the body tissue through the first electrode provided on one edge side of the housing. Also, the capsule type medical device moves backward due to the electrical stimulation supplied to the body tissue through the second electrode disposed on the other edge side of the housing.
In the capsule-type medical device of the present invention, it is preferable that the first inter-electrode distance changing means is formed of a flexible wire that supports the first electrode at a distal end, and the flexible wire is supported by the housing at a base end (base end) thereof and projects outward from the housing.
According to the capsule type medical device of the present invention, the contact between the electrode and the body tissue is made more accurate by the elastic deformation of the flexible wire. Moreover, when the device is introduced into the luminal organ, the change of the diameter of the luminal organ is accurately compensated and a constant contact between the electrode and the body tissue is ensured.
In the capsule type medical device of the present invention, it is preferable that the flexible wire is in a band shape, and a width of the first electrode is substantially the same as a width of the flexible wire.
According to the capsule type medical device of the present invention, electrical contact with a large area of the body tissue is ensured, and therefore, the amount of current necessary for contraction is delivered to the body tissue in a stable manner.
In the capsule type medical device of the present invention, it is preferable that the flexible wire includes: a wire member for supplying current from the base end to the tip end; and an insulating cover member for insulating and covering the wire member, and at least one of the wire member and the insulating cover member has flexibility and elasticity.
According to the capsule type medical device of the present invention, the wire member is covered and insulated with the insulating covering material, and therefore, short circuits between the flexible wires can be accurately prevented, thereby enabling the flexible wires to be disposed close to each other.
In the capsule type medical device of the present invention, it is preferable that the flexible wire is made of a super-elastic alloy and/or super-elastic polymer material.
According to the capsule type medical device of the present invention, large elastic deformation of the flexible wire is achieved, so that the change in the diameter of the lumen organ within the living body is accurately compensated, and constant contact between the electrode and the body tissue is ensured.
Preferably, the capsule type medical device of the present invention further comprises: a wire tying device for tying the flexible wire near the distal end and dissolving in the living body.
According to the capsule-type medical device of the present invention, in the case where the flexible wire is bundled at the distal end side, it is made possible to easily introduce the capsule-type medical device into the living body, since the flexible wire and the electrode do not become obstacles when the capsule-type medical device is placed in the living body, for example, by swallowing the capsule-type medical device. After deployment of the capsule type medical device, the wire tying device is dissolved by gastric acid or the like, and thus, the wires are scattered, so that the inter-electrode distance can be changed.
In the capsule-type medical device of the present invention, it is preferable that the first interelectrode distance changing means is a housing unit that is mounted to the casing movably outward, and the first electrode is fixed to the housing unit.
According to the capsule type medical device of the present invention, a plurality of electrodes are fixed in the housing unit to form one unit, and the electrodes are accurately brought into contact with the body tissue by moving the electrodes in the radial direction of the housing unit.
In the capsule-type medical device of the present invention, it is preferable that two or more of the first electrodes are provided along a periphery of the housing, and the capsule-type medical device further includes: an electrode selector for selecting an electrode to be supplied with current from the current control device among the first electrodes.
According to the capsule-type medical device of the present invention, selecting the position along the periphery where the electrical stimulation is to be provided enables the capsule-type medical device to be accurately moved also in the horizontal direction.
In the capsule type medical device of the present invention, it is preferable that the electrode selector is an electrode area changing device that changes an area of each first electrode that supplies electrical stimulation to the body tissue by arbitrarily selecting some electrodes among the first electrodes.
According to the capsule type medical device of the present invention, the area of each electrode is changed to ensure the optimal electrode area of each electrode, and it becomes simple to deliver a desired amount of current to the body tissue.
Preferably, the capsule type medical device of the present invention further comprises: a cord storage unit for storing the flexible cord within the housing.
According to the capsule type medical device of the present invention, when the electrode is not used, the flexible wire is stored within the housing so that the flexible wire does not protrude from the housing.
Preferably, the capsule type medical device of the present invention further comprises: a rotating shaft connected to the base end of the flexible wire and rotatably supported within the wire storage unit; and an actuator for driving the rotary shaft.
According to the capsule type medical device of the present invention, the flexible wire is released or wound by driving the actuator to rotate the rotary shaft, and therefore, the inter-electrode distance can be arbitrarily changed.
In the capsule type medical device of the present invention, it is preferable that the flexible wire has a shape memory property, the flexible wire enters a coil-like wound state at a temperature of 30 ℃ or less and returns to a substantially straight line at a temperature of 35 ℃ or more.
According to the capsule type medical device of the present invention, the flexible wire is under a condition close to room temperature (about 25 ℃) before being introduced into the living body, and thus the flexible wire is stored in the wire storage unit in a coil-like wound state. Also, after deployment within the living body, the flexible wire is in a near body temperature condition (about 35 ℃), so the flexible wire returns to a near straight state. Thus, once the capsule-type medical device is swallowed, the flexible wire may be autonomously deployed from the wire storage unit.
Preferably, the capsule type medical device of the present invention further comprises: a heating device for heating inside the wire storage unit, and the flexible wire has a shape memory property by which the flexible wire is restored from a substantially coil-like wound state to a straight shape at a temperature of 40 ℃ or more.
According to the capsule type medical device of the present invention, the flexible wire is in a normal room temperature state (about 25 ℃) before entering the living body, and therefore, the flexible wire is stored in the wire storage unit in a state of being wound around the rotation shaft in a substantially coil shape. Even after entering the living body, the flexible wire is kept at a body temperature (about 35 ℃) lower than 40 ℃, and therefore, the flexible wire is kept in the wire storage unit maintaining the original shape. Also, when the temperature inside the wire storage unit is increased to more than 40 ℃ by the operation of the heating means, the flexible wire is restored to a substantially straight shape. Therefore, by driving the heating means to operate after swallowing the capsule type medical device, it is possible to deploy the flexible wire from the wire storage unit at a desired position within the living body.
Preferably, the capsule type medical device of the present invention further comprises: a power supply for supplying power to the first electrode; and a lead wire having at least a portion thereof with flexibility for electrically and mechanically connecting the power source and the electrode, wherein the first inter-electrode distance changing device includes an elastic expansion unit elastically expandable and at least partially mounted on the housing, and the first electrode is provided on the elastic expansion unit.
According to the capsule type medical device of the present invention, the electrode is accurately brought into contact with the inner wall of a lumen organ (e.g., digestive tract having a non-uniform outer diameter) by the expansion of the elastic expansion unit at a desired position within the living body. Also, due to the bendability of the lead wire connecting the electrode and the power source, it is possible to cope with the expansion and contraction of the elastic expansion unit. Furthermore, stable electrical stimulation can be provided with little interruption (e.g., caused by a broken lead).
Preferably, the capsule type medical device of the present invention further comprises: and an expansion means for expanding the elastic expansion unit, wherein the expansion means is provided separately from the housing and detachably mounted on the housing.
According to the capsule type medical device of the present invention, since the expansion means is provided separately from the housing, the structure of the housing can be sufficiently simplified.
In the capsule-type medical device of the present invention, it is preferable that the elastic expansion unit is detachably mounted on the housing.
According to the capsule type medical device of the present invention, it is possible to mount the elastic expansion unit, which is most suitable for use, on the housing according to the use of the capsule type medical device. Also, it is easy to reuse a relatively expensive main device, for example, while discarding a relatively cheap elastic expansion unit after each use.
In the capsule type medical device of the present invention, it is preferable that a hard member that is harder than other portions of the elastic expansion unit is provided on the elastic expansion unit, and the first electrode is provided on the hard member.
According to the capsule type medical device of the present invention, if the electrode is made of a material that does not substantially expand or contract, such as metal, the mutual difference in the contraction rate and the expansion rate between the electrode and the elastic expansion unit can be made small by mounting the electrode in the hard member. Therefore, the electrode can be mounted in the elastic expansion unit in a good state and held in the elastic expansion unit.
In the capsule type medical device of the present invention, it is preferable that the electrical stimulation signal to be transmitted to the electrode is generated by modulating a pulse signal of 100Hz or lower with a pulse signal of 1000Hz or higher.
Drawings
Fig. 1A is a diagram illustrating a basic structure of a capsule-type medical device in a first embodiment of the present invention, which is a side view of the capsule-type medical device.
Fig. 1B is a view illustrating the basic structure of a capsule-type medical device in the first embodiment of the present invention, which is a rear view of the capsule-type medical device.
Fig. 1C is a diagram illustrating a basic structure of a capsule-type medical device in the first embodiment of the present invention, which is a rear view of a modified example of an electrode and a flexible wire to be provided in the capsule-type medical device of fig. 1A and 1B.
Fig. 2 is a block diagram showing a capsule type medical device and an external device in the first embodiment of the present invention.
Fig. 3 is a side view showing a state of a capsule type medical device in the first embodiment of the present invention before introduction into a living body.
Fig. 4A and 4B are schematic views showing the manner in which the capsule type medical device in the first embodiment of the invention is advanced in the intestine.
Fig. 5 is a side view showing a first modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 6A is a side view showing a second modification example of the capsule-type medical device in the first embodiment of the invention.
Fig. 6B is a rear view showing a second modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 7A is a side view showing a second modification example of the capsule-type medical device in the first embodiment of the invention.
Fig. 7B is a rear view showing a second modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 8 is a side view showing a third modification example of the capsule-type medical device in the first embodiment of the invention.
Fig. 9 is an enlarged view of a main portion of the capsule-type medical device indicated by hatching in fig. 8.
Fig. 10A is a side view showing a fourth modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 10B is a rear view showing a fourth modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 11A is a side view showing a fourth modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 11B is a rear view showing a fourth modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 12A to 12C are diagrams showing a modified example of the electrode in the capsule-type medical device of fig. 10A and 10B, which are cross-sections in the vicinity of the electrode.
Fig. 13A is a side view showing a fifth modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 13B is a rear view showing a fifth modified example of the capsule-type medical device in the first embodiment of the invention.
Fig. 14A to 14E are schematic diagrams illustrating a modified example of the electrode in the capsule-type medical device of fig. 13A and 13B.
Fig. 15A to 15C are schematic views showing a manner of advancing the fifth modified example of the capsule-type medical device in the large intestine.
Fig. 16 is a side view showing a sixth modified example of the same capsule-type medical device.
Fig. 17A is a diagram illustrating the basic structure of a capsule-type medical device in a second embodiment of the present invention, which is a side view of the capsule-type medical device.
Fig. 17B is a diagram illustrating the basic structure of a capsule-type medical device in the second embodiment of the present invention, which is a rear view of the capsule-type medical device.
Fig. 18 is a block diagram illustrating a capsule type medical device in a second embodiment of the present invention.
Fig. 19 is an enlarged view of the vicinity of the electrode of the capsule-type medical device shown in fig. 18.
Fig. 20A is a diagram illustrating the basic structure of a capsule-type medical device in a second embodiment of the present invention, which is a side view of the capsule-type medical device.
Fig. 20B is a diagram illustrating the basic structure of a capsule-type medical device in the second embodiment of the present invention, which is a rear view of the capsule-type medical device.
Fig. 21 is a view showing a state in which the same capsule-type medical device is introduced into a living body, and electrical stimulation is provided according to the position.
Fig. 22 is a diagram showing an example of the positions of the picture screens of the stomach, small intestine, large intestine, and anus taken by the capsule type medical device.
Fig. 23A is a side view showing a first modification example of the capsule-type medical device in the second embodiment of the invention.
Fig. 23B is a rear view showing a first modified example of the capsule-type medical device in the second embodiment of the invention.
Fig. 24 is a partial sectional view showing a second modification example of the same capsule-type medical device.
Fig. 25A is a side view showing a third modified example of the same capsule-type medical device.
Fig. 25B is a rear view showing a third modified example of the same capsule-type medical device.
Fig. 26 is a diagram showing the structure of a capsule type medical device in a third embodiment of the invention.
Fig. 27A and 27B are schematic diagrams showing waveforms of pulse signals to be transmitted to electrodes when electrical stimulation is provided to body tissue.
Fig. 28A is a sectional view showing a first modification example of the capsule-type medical device in the third embodiment of the invention.
Fig. 28B is a partially enlarged view of the first deformation model of the capsule-type medical device shown in fig. 28A.
Fig. 29A is a side view showing a second modification example of the capsule-type medical device in the third embodiment of the invention.
Fig. 29B is a sectional view showing a second modification example of the capsule-type medical device in the third embodiment of the invention.
Fig. 30 to 32 are side views showing a third modified example of the capsule type medical device in the third embodiment of the invention.
Fig. 33 to 34B are side views showing a fourth modified example of the capsule type medical device in the third embodiment of the invention.
Fig. 35 is a side view showing a fifth modified example of the capsule type medical device in the third embodiment of the invention.
Fig. 36 is a sectional view showing a sixth modified example of the capsule-type medical device in the third embodiment of the invention.
Fig. 37 is a sectional view showing a seventh modified example of the capsule-type medical device in the third embodiment of the invention.
Fig. 38 is a sectional view showing an eighth modified example of the capsule-type medical device in the third embodiment of the invention.
Fig. 39A to 39C are sectional views showing a ninth modified example of the capsule type medical device in the third embodiment of the invention.
Fig. 39D is a sectional view showing a moving member provided in the capsule-type medical device shown in fig. 39A to 39C.
Fig. 40A to 40B are side views showing a tenth modified example of the capsule type medical device in the third embodiment of the invention.
Fig. 40C is a sectional view showing a tenth modified example of the capsule type medical device in the third embodiment of the invention.
Fig. 41A and 41B are side views showing an eleventh modified example of the capsule-type medical device in the third embodiment of the invention.
Fig. 42A is a sectional view showing a twelfth modification example of the capsule-type medical device in the third embodiment of the invention.
Fig. 42B is an oblique view showing a twelfth modified example of the capsule-type medical device in the third embodiment of the invention.
Fig. 43A is a side view showing a capsule type medical device in a fourth embodiment of the invention.
Fig. 43B and 43C are sectional views showing partially enlarged views of the capsule-type medical device shown in fig. 43A.
Fig. 44A and 44B are side views showing a state in which the capsule type medical device in the fourth embodiment is introduced into a body cavity.
Fig. 45A is a sectional view showing a capsule type medical device in a fifth embodiment of the invention.
Fig. 45B is a front view showing a capsule type medical device in a fifth embodiment of the invention.
Fig. 46A and 46B are side views showing a partial sectional view of an endoscope in a sixth embodiment of the present invention.
Fig. 47A to 47C are side views showing a state in which an endoscope of the sixth embodiment of the present invention is introduced into a living body cavity.
Fig. 48 is a side view showing an endoscope in a sixth embodiment of the present invention.
Fig. 49A is a side view showing a modified example of the endoscope in the sixth embodiment of the present invention.
Fig. 49B is a sectional view showing a modified example of the endoscope in the sixth embodiment of the present invention.
Fig. 50A is a sectional view showing a modified example of the endoscope in the sixth embodiment of the present invention.
Fig. 50B and 50C are side views showing a state in which an endoscope of the sixth embodiment of the present invention is introduced into a living body cavity.
Detailed Description
Hereinafter, embodiments of the capsule type medical device of the present invention will be described with reference to the accompanying drawings.
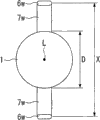
A first embodiment of the present invention is explained with reference to fig. 1A to 15. The capsule-type medical device C1 shown in fig. 1A to 2 is a basic structure of the capsule-type medical device in the present embodiment. The capsule type medical device C1 includes: an imaging unit (in-vivo information acquisition device) 2; a control unit (current control device) 3; a wireless transceiver unit (communication device) 4; and a battery 5 for supplying power to each structural unit as a whole within the housing 1. The capsule medical device C1 includes a pair of electrodes 6 and a flexible wire 7. The flexible wire 7 serves as an inter-electrode distance changing means for changing the distance between the pair of electrodes 6.
The housing 1 is a capsule shape extending along the axis L, and is formed using plastic or the like to seal the inside. A hemispherical transparent dome 1d is provided in the front of the housing 1. The transparent dome 1d is provided inside (i.e., in the front (front side along the axis L)) with a photographing element 2a and a light emitting element 2 b. The photographing element 2a includes a lens, a CCD (charge coupled device), and the like for taking a picture by photographing a part in a living body. The light emitting element 2b includes an EL (electroluminescence) element, an LED (light emitting diode), or the like that illuminates the field of view of the image pickup element 2a by emitting light. The photographing unit 2 that acquires in-vivo information by photographing in a living body includes a photographing element 2a and a light emitting element 2 b.
The wireless transceiver unit 4 includes: a transmitting/receiving body (not shown); and a transmission/reception antenna (a transmission antenna and a reception antenna) that transmits and receives radio waves. The wireless transceiver unit 4 wirelessly transmits in-vivo information, i.e., a picture taken by the photographing element 2a, to an external device 100 (described later). Also, the wireless transceiver unit 4 receives control signals (commands) (described later) wirelessly transmitted from the external device 100, and transmits them to the control unit 3.
The control unit 3 has a function of comprehensively controlling the operations of the respective parts within the capsule type medical device C1 in accordance with control signals (commands) from the wireless transceiver unit 4. Further, a current generation unit 3a for supplying a current to the electrode 6 through the flexible wire 7 is provided in the control unit 3. In other words, the control unit 3 has a function as a current control device for controlling the current to be supplied to the electrode 6.
These flexible wires 7 are made of a flexible conductive member, and base ends thereof are supported at the rear side (the other end along the axis L) of the housing 1, respectively. The flexible wires 7 protrude from the housing 1 in such a manner that each wire is separated from the other wires, and the tip of each wire supports the electrode 6. In other words, the electrode 6 is arranged on the rear side of the housing by means of the flexible wire 7. The flexible wire 7 is connected to the control unit 3 in the housing 1, and supplies current from the current generation circuit 3a to each electrode 6. Also, the flexible wire 7 has a function of changing the distance between the electrodes by elastic deformation. This function enables precise compensation of the luminal organ diameter in the living body. The flexible wire is preferably made of a superelastic alloy. The use of a superelastic alloy for the flexible wire makes the flexible wire 7 more flexible than a common metal, and therefore, the change in the diameter of the luminal organ in the living body is more reliably counteracted (abs).
The electrodes 6 are in contact with the body tissue and provide electrical stimulation to the body tissue. In order not to hinder the advancement of the capsule-type medical device C1, these electrodes 6 are substantially spherical. The electrode 6 is made of at least one material among stainless steel, platinum, and titanium, each having high electrical conductivity, thus enabling efficient current flow. Moreover, this makes the electrode highly compatible with the living body.
The maximum distance of separation between the electrodes 6 (i.e., the maximum value (X) of the distance between the electrodes that is changed by the flexible wire 7) is preferably greater than twice the outer diameter (D) of the capsule-type medical device C1 (X ≧ 2D), as shown in FIGS. 1A and 1B. In view of the ease of introducing the capsule-type medical device C1 into a living body, it is not preferable to make the outer diameter of the capsule-type medical device C1 unnecessarily large. For example, about 10mm (preferably about 11mm) is suitable. However, the inner diameter of even the small intestine, which is considered to have one of the smallest inner diameters among the lumen organs, is about 20 to 30 mm. Therefore, in order for the electrodes 6 to accurately provide electrical stimulation to the body tissue within the lumen, the maximum spacing between the electrodes 6 should be greater than twice (preferably greater than 3 times) the outer diameter of the capsule-type medical device.
Moreover, the flexible wire 7 may comprise: a lead member that supplies current from a base end to a distal end; and an insulating member (e.g., resin) for insulating and covering the wire member. Alternatively, a bare lead member may be integrated with the electrode 6 for providing electrical stimulation to body tissue. If the lead member is exposed, a large electrical contact area can be secured to deliver the electrical current, and thus a constant amount of current required for electrical stimulation can be provided when electrical stimulation is provided to the body tissue. Here, the flexible wire may be made in a strip shape (e.g., a wire represented by 7 w), and the electrode may be made as a wider electrode 6w having substantially the same width as the flexible wire, as shown in fig. 1C. Thereby, a larger electrical contact area is obtained and a more stable supply of the electrical current required for the contraction to the body tissue can be achieved.
Further, the wire itself does not have high elasticity like a super elastic alloy, and thus the insulating member that covers and insulates the wire member is made of a resin (super elastic polymer material) or the like having super elasticity. Therefore, super elasticity can be provided to the flexible wire 7. Further, a combination of a pair of electrodes 6 and a flexible wire 7 is provided at an interval of 180 ° around the capsule-type medical device, and two pairs of electrodes (4 electrodes in total) may be provided at an interval of 90 °. This enables the electrode 6 to be in more accurate contact with the body tissue.
The external device 100 controls the capsule type medical device from outside the living body. As shown in fig. 2, the external device 100 includes, within a main body (101) of the device: a wireless transceiver unit (transmitting unit and detecting unit) 102 for transmitting and receiving information to and from the capsule-type medical device C1; a recording unit 103 (e.g., a memory) for storing the above-described in-vivo information (i.e., photographic image); a control unit 104 for controlling the units; and a battery 105 for supplying power to the units.
The main body 101 of the apparatus is formed in a box shape from metal (e.g., aluminum) and plastic, and can be mounted on the body of the person under examination using a belt (belt) or the like. Thus, the person under examination can wear the external device 100 on the living body all the time. Like the wireless transceiver unit 4 of the capsule type medical device C1, the wireless transceiver unit 102 includes: a main body (not shown) of the transmitting/receiving unit; and transmission/reception antennas (a transmission antenna and a reception antenna) for transmitting and receiving radio waves. The wireless transceiver unit 102 receives in-vivo information (i.e., a photographic image) wirelessly transmitted from the capsule type medical device C1, and transmits the image to the control unit 104.
The control unit 104 performs predetermined processing such as image processing on the received photo image, and then always records the image in the recording unit 103. A position detection circuit 104a for detecting the position of the capsule medical device C1 in the living body is embedded in the control unit 104. In the position detection circuit 104a, a setting image (reference image) is preset, and the circuit detects the position of the capsule-type medical device C1 in the living body by comparing the received photographic image with the setting image. Here, the position detection circuit 104a may detect the position of the capsule-type medical device C1 by comparing the photographic image with the setting image, or may detect the position of the capsule-type medical device C1 from other characteristics such as a predetermined color and shape in the photographic image.
Also, the position detection circuit 104a may detect the position from the intensity of a radio wave (not a photographic image) transmitted from the wireless transceiver unit 4 to the outside of the living body or received from the outside of the living body. In this case, a plurality of antennas are provided in the wireless transmitting/receiving unit on the external device 100 side, and the position is calculated by triangulation or the like based on the positions of the plurality of antennas and the intensity of the radio wave. Further, the position may be calculated by mounting a magnetic field generating coil or a magnetic sensor on the capsule type medical device C1 or the external device 100, and detecting an external magnetic field generated inside the living body or internally detecting a magnetic field generated outside the living body.
Also, the control unit 104 transmits a control signal corresponding to body tissue (for example, stomach, small intestine, or large intestine) around the capsule type medical device whose position is detected by the position detection circuit 104a through the wireless transceiver unit 102.
Next, the following case is explained: the capsule type medical device C1 having the above-described structure is used to examine the interior of a living body of a human subject.
First, the person under examination wears the external device 100 using a belt or the like. Then, the person eats (swallows) the capsule-type medical device C1 from the mouth to deploy the capsule-type medical device C1 in vivo. Before swallowing the capsule type medical device C1, the flexible wires 7 are pre-bundled with each other using a wire bundling band (wire bundling means) made of a material absorbable by the body, such as starch, as shown in fig. 3. This minimizes the obstruction that may be caused by the flexible wire 7 and the electrode 6 during swallowing of the capsule-type medical device C1. A switch (not shown) is provided in the capsule type medical device C1. The switch is turned on when the capsule-type medical device C1 is swallowed, so that power can be supplied from the battery 5 to each component. Thereby, the control unit 3 drives the photographing unit 2 (i.e., the photographing element 2a and the light emitting element 2 b).
The encapsulated medical device C1 introduced into a living body photographs a portion inside the living body using the photographing element 2a as the device moves inside the digestive tract. At the same time, it transmits the photo image from the wireless transceiver unit 4 to the external device 100. Meanwhile, the external device 100 receives these photo images through the wireless transceiver unit 102, and performs image processing on these photo images using the control unit 104, and continuously stores these images in the storage unit 103. The control unit 104 continuously transmits control signals through the wireless transceiver unit 102 corresponding to body tissue (e.g., stomach, small intestine, or large intestine) surrounding the encapsulated medical device whose position is detected by the position detection circuit 104 a.
Upon reaching the stomach, the wire harness 7B of the capsule type medical device C1 is dissolved by gastric acid and absorbed in vivo. This releases the electrodes 6 and the flexible wires 7 from their bundled state, causing the distance between the electrodes to change. Thus, the operator advances the capsule-type medical device C1 by providing electrical stimulation to body tissue (e.g., stomach, small intestine, large intestine, and others) as needed while viewing the photographic image. In fact, a rapid change in the photographic image indicates that the capsule-type medical device C1 is moving too fast. Therefore, the operator reduces the number of times the current is supplied to the electrode 6 to reduce the speed of the capsule-type medical device C1. On the other hand, little change in the photographic image indicates that the capsule-type medical device C1 hardly moves. Accordingly, the operator increases the frequency of supplying the current to the electrode 6, which increases the moving speed of the capsule-type medical device C1.
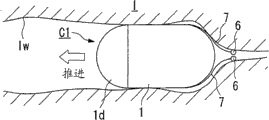
Next, a state in which the capsule-type medical device C1 reaches the small intestine I after passing through the stomach and duodenum is shown in fig. 4A and 4B. In this case, the control unit 3 receives a control signal commanding the provision of electrical stimulation from the external device 100 to deliver current to the electrode 6 and provide electrical stimulation to the wall Iw of the small intestine I, as shown in fig. 4B. The small intestine I near the location of the electrical stimulation contracts, which results in advancing the capsule-type medical device pushed by the contraction of the small intestine I, as shown in fig. 4B. At this time, the flexible wire is elastically deformed with the contraction of the small intestine I, so that the change in the diameter of the small intestine I is accurately compensated. Thus, the movement of the capsule-type medical device within the small intestine I is more accurate than the case of moving by the autonomous peristalsis of the small intestine I. Therefore, the time required for observation is shortened, enabling effective observation of the interior of the intestine.
The capsule type medical device C1 next passes through the large intestine in a similar manner as above, and is discharged from the anus to the outside of the living body. The doctor or the like checks the health condition of the person based on the in-vivo information (i.e., the photographic image) recorded in the recording unit 103 of the external apparatus 100.
Instead of estimating the moving speed of the capsule-type medical device C1 from the change in the photographic image as described above, a moving speed detecting device such as a speed sensor or an acceleration sensor may be provided to detect the moving speed of the capsule-type medical device to adjust the amount and timing of the current for electrical stimulation only within the capsule-type medical device C1 according to the detection result of the sensor. Thereby, the capsule type medical device C1 can automatically move at a constant speed irrespective of the external device 100 and acquire in-vivo information. Only the external device 100 is required to receive and record the in-vivo information acquired by the capsule type medical device C1, and therefore the processing becomes simple.
Further, since the processing of the photographic image is not performed, it is not necessary to attach a photographic sensor to the capsule-type medical device C1. Therefore, an in-vivo information acquisition sensor having a function other than the photograph function can be mounted on the capsule type medical device without any problem. Incidentally, the in-vivo information acquisition sensor may include: a pH sensor for acquiring a pH value in a living body; an ultrasonic sensor or an optical tomographic (elevation shielding) sensor for acquiring a sectional image of the inside of a wall of an internal organ; a microwave image sensor for generating an image of a specific body tissue such as a tumor; a temperature sensor for detecting a temperature; a bleeding sensor for detecting bleeding in a living body; chemical sensors for detecting chemical substances such as enzymes produced by specific disease regions; and a chemical sensor for detecting the presence and amount of bacteria in the intestine.
Since this capsule type medical device C1 includes the flexible wire 7 as an inter-electrode distance changing means for changing the distance between the electrodes, the electrodes 6 are accurately brought into contact with the body tissue, and electrical stimulation is provided. This enables the body tissue to accurately perform the contraction action. Therefore, stable advancement of the capsule-type medical device C1 can be achieved.
Also, since the electrode 6 is made of stainless steel, platinum, titanium, or other materials, high conductivity and efficient current flow are achieved. Furthermore, a high body compatibility is provided for the electrode 6.
Further, since the interelectrode distance changing device includes the flexible wire which is extended outward, the base end of which is supported by the casing 1, and the tip end of which supports the electrode 6, the interelectrode distance changing device is simple in structure. Furthermore, the flexible wire 7 is easily elastically deformed. Thus, by deploying the balloon-type medical device C1 within the luminal organ, changes in luminal organ diameter are accurately compensated for, thereby accurately bringing the electrode 6 into contact with the body tissue.
Moreover, in the case where the flexible wire 7 is made of a superelastic alloy, it becomes possible to produce a large deformation of the flexible wire, which enables more accurate compensation for a change in the diameter of a luminal organ within a living body.
Moreover, since the distal ends of the flexible wires 7 are tied to each other with the wire tying band 7B made of a living body absorbent material, the electrodes 6 and the flexible wires 7 do not cause a problem when the capsule-type medical device C1 is swallowed, so that the capsule-type medical device can be easily deployed in the living body. After swallowing the capsule type medical device, the wire-binding band 7B is dissolved by gastric acid and absorbed in the living body. Thus, the binding between the flexible wires 7 is released, so that the distance between the electrodes 6 can be changed.
Next, a modified example of the capsule type medical device C1 in the above-described first embodiment is shown.
Here, the respective structural elements of the capsule-type medical device C1, such as the photographing unit 2 (photographing element 2a and light emitting element 2b), the control unit 3, the wireless transceiver unit 4, and the battery 5, are common structural elements provided in the following respective modified examples of the capsule-type medical device in a similar manner. Here, in the following examples, the representation and detailed description of these structural elements are omitted. Also, other structural elements similar to those in the capsule-type medical device C1 are denoted by the same symbols, and detailed description thereof is omitted.
Fig. 5 shows a first modification example.
In the capsule medical device C2, a pair of front electrodes (second electrodes) 8 are provided on the front side (the other edge side along the axis) of the housing 1 of the capsule medical device C1. Further, a front side flexible wire 9 as a second inter-electrode distance changing means for changing the distance between the pair of front side electrodes 8 is provided. These front-side electrodes 8 and front-side flexible wires 9 have substantially the same structure as the electrodes 6 and flexible wires 7.
The base end of the front flexible wire 9 is supported at the front side (the other end along the axis L) of the housing 1 but at the rear side of the transparent dome 1 d. The front-side flexible wires 9 protrude from the housing 1 to the outside in such a manner that each wire can move away from the other wire, and support the front-side electrodes 8. In other words, the electrode 8 is disposed on the front side of the housing 1 through the flexible wire 9 and is separated from the photographing unit 2. Therefore, the electrode 8 does not interfere with the imaging by the imaging unit 2.
Further, the front flexible wires 9 are connected to the control unit 3 (shown in fig. 2) within the housing 1, and current is supplied from the current generation circuit 3a to the respective front electrodes 8, and the distance between the front electrodes 8 is changed by means of elastic deformation. The control unit has the function as a second current control means which controls the current to be delivered to the front side electrode 8 in accordance with a control signal (command) from the wireless transceiver unit 4, independently of the control of the current to be delivered to the electrode 6.
In the capsule type medical device C2, the front-side electrode 8 and the front-side flexible wire 9 are provided at the front portion of the housing 1 separately from the electrode 6 and the flexible wire 7 provided at the rear portion of the housing 1, and the current to be delivered is independently controlled so that the capsule type medical device C2 can freely move forward and backward in the living body. In other words, the capsule type medical device C2 is moved forward by the electrical stimulation of the body tissue by the electrode 6 provided on the rear side of the housing 1, and is moved backward by the electrical stimulation of the body tissue by the front side electrode 8 provided on the front side of the housing 1. Thus, the operator can move the capsule-type medical device C2 forward or backward as necessary in a lumen organ such as the small intestine and the large intestine, for example, while viewing the photographic image, which improves the operability. Moreover, the operator can easily manipulate the device regardless of which direction (anterior or posterior) the capsule type medical device C2 is entered from the stenotic luminal organ. Furthermore, since both forward and backward movements are available, any possible position in the luminal organ can be observed.
Here, the control unit 3 has a function as the first current control means and a function as the second current control means, but two control units 3 may be provided such that one functions as the first current control means and the other functions as the second current control means. Also, a photographing unit may be provided at the rear of the housing 1. Thereby, any possible position in the luminal organ can be observed.
Fig. 6A to 7B show a second modification example.
The structure of the housing 11 of the capsule medical device C3 is different from that of the housing of the capsule medical device C1 described above. In the housing 11 of the capsule type medical device C3, a groove 11g for the storage electrode 6 and the flexible wire 7 is formed along the outer circumference. Before the capsule type medical device C3 is deployed in the living body, the electrodes 6 and the flexible wires 7 are fixed in advance in the grooves 11g with a wire tying band (wire fixing device) made of a living body absorptive material such as starch, as shown in fig. 6A and 6B. Thus, the flexible wire 7 and the electrode 6 do not become an obstacle when the capsule-type medical device C3 is swallowed.
Upon reaching 1 into the stomach, the wire-tying band of the capsule type medical device C3 is dissolved by gastric acid and absorbed in vivo. This releases the electrodes 6 and the flexible wires 7 from their bundled state, causing the distance between the electrodes 6 to change, as shown in fig. 7A and 7B.
In the capsule type medical device C3, a groove 11g for the storage electrode 6 and the flexible wire 7 is formed along the outer circumference of the housing 11. Therefore, the flexible wire 7 is stored in such a manner that the storage space is minimized, and the flexible wire 7 does not protrude from the outer surface of the housing 11 when the electrode 6 is not used.
Moreover, since the electrode 6 and the flexible wire 7 are fixed within the groove 11g using the wire binding band 11B made of a living body absorbing material, the electrode 6 and the flexible wire 7 do not become an obstacle when the capsule-type medical device C3 is swallowed, so that it can be easily deployed inside the living body. After deployment, the wire-tying band 11B is dissolved by gastric acid and absorbed in vivo, the electrodes 6 and the flexible wires 7 are loosened, and thus the distance between the electrodes 6 is freely changed. Thus, precise manipulation of the electrodes 6 and the flexible wires in the living body is achieved.
Fig. 8 and 9 describe a third modified example.
The structure of the housing 12 of the capsule medical device C4 is different from that of the housing of the capsule medical device C1 described above. In addition, the structure of the flexible wire 71 is different from that of the flexible wire of the above-described capsule-type medical device C1. In the housing 12 of the capsule type medical device C4, a wire storage unit 21 for individually storing the flexible wire 71 and the electrode 6 is provided inside the housing 12.
The wire storage unit 21 has an opening 21h formed in the rear of the housing 12 in a groove shape. The electrode 6 and the flexible wire 71 may appear or disappear from the outside through the opening 21 h. A freely rotatable rotation shaft 21r is supported in the wire storage unit 21. Each base end of the flexible wire 71 is connected to the rotary shaft 21 r. The current flows from the control unit 3 to the electrode 6 through the rotation shaft 21r and the flexible wire 71.
The flexible wire 71 is made of a shape memory alloy and is given the following shape memory properties: in a coil-like wound state at a temperature of 30 ℃ or lower, and returns to an approximately straight shape at a temperature of 35 ℃ or higher. Before the capsule type medical device C4 is deployed into the living body, the flexible wires 71 are at room temperature (about 25 ℃), and thus the flexible wires 71 are stored in the wire storage unit 21 in their substantially coil-like wound state. Also, after the capsule type medical device C4 is deployed into the living body, the flexible wire 71 is in a near body temperature condition (about 36 ℃), and thus the flexible wire is restored to a near straight state. Therefore, the flexible wire 71 can be automatically deployed from the wire storage unit 21 once the capsule-type medical device C4 is swallowed.
In the capsule-type medical device C4, the electrodes 6 and the flexible wires 71 are stored in the electrode storage unit 21 so that no object protrudes from the housing 12 when the capsule-type medical device C4 is swallowed, thereby enabling the capsule-type medical device C4 to be easily swallowed. After the capsule type medical device is introduced into a living body and the temperature rises to approach the body temperature, the electrodes 6 and the flexible wires 71 are deployed and operated, accurately providing electrical stimulation to the body tissue.
The capsule type medical device of the present invention preferably further comprises a heating means for heating the inside of the wire storage unit, and the flexible wire preferably has the following shape memory property: at a temperature of 40 ℃ or higher, the coil is recovered from the substantially coil-like wound state to a linear shape.
Here, the following shape memory properties can be imparted to the flexible wire 71: at temperatures above 40 ℃, the flexible wires 71 recover from their coiled, wound state to a near linear shape. In addition, a heating device (not shown) that is controlled by the control unit 3 and heats the inside of the wire storage unit 21 may be provided. If the flexible wire 71 is made to memorize such a shape before the capsule type medical device C4 is introduced into the living body, since the flexible wire 71 is at room temperature (about 25 ℃) before being deployed into the living body, the flexible wire 71 can be stored in a substantially coil-like wound state around the rotation axis 21 r. Even after entering the living body, the flexible wire 71 is kept at a body temperature (about 35 ℃) lower than 40 ℃, and therefore, the flexible wire 71 is kept within the wire storage unit 21 maintaining the original shape. Also, when the temperature inside the wire storage unit 21 is increased to more than 40 ℃ by the operation of the heating means, the flexible wire is restored to a straight shape. Therefore, by operating the heating means by driving after swallowing the capsule-type medical device C4, it is made possible to deploy the flexible wire from the wire storage unit 21 at a desired position in the living body.
In the capsule-type medical device C4, the electrodes 6 and the flexible wires 71 are stored in the electrode storage unit 21 so that no object protrudes from the housing 12 when the capsule-type medical device C4 is swallowed, thereby making it possible to easily swallow the capsule-type medical device C4. By operating the heating device after the capsule type medical device C4 is introduced into the living body, the electrodes 6 and the flexible wires 71 are deployed and operated, and electrical stimulation is accurately provided to the body tissue.
Fig. 10A to 12C describe a fourth modified example.
The structure of the inter-electrode distance changing device of this capsule medical device C5 is different from that of the above-described capsule medical device C1. The capsule type medical device C5 includes a pair of housing units 72a, 72 b. Electrodes are fixed to the pair of housing units 72a, 72b, and the pair of housing units 72a, 72b are mounted outside the housing 13 in such a manner that the housing units move outward away from each other with respect to the housing 13.
Each of the housing units 72a, 72b has a hemispherical shape and is mounted on the housing 13 in the following manner: the hemisphere covers from near the center to the rear edge portion of the housing 13 along the length of the housing 13. In the state where the case units 72a, 72B are closed, the case units 72a, 72B cover the length of the housing 13 from the vicinity of the center up to the rear edge portion, as shown in fig. 10A and 10B. Between the case units 72a, 72b and the housing 13, springs 72s are installed which push the respective case units 72a, 72b outward in the radial direction. A plurality of electrodes 61 are fixed to the outside of the case units 72a and 72 b. Each electrode 61 is electrically connected to the control unit 3, and current flows from the control unit 3.
Further, in the capsule type medical device C5, engagement means (not shown) for holding and releasing the housing units 72a, 72b, which are controlled by the control unit 3, are provided. Before introducing the capsule type medical device C5 into the living body, the housing units 72a, 72B are stopped in the closed state by the engaging means, as shown in fig. 10A and 10B. After introducing the capsule type medical device C5 into the living body, the control unit 3 controls the engagement device to release the engaged state of the housing units 72a, 72B, as shown in fig. 11A and 11B. The housing units 72a, 72b are urged by the springs 72s to move outward and start operating, thereby enabling the distance between the electrodes 61 to be freely changed.
In the capsule type medical device C5, a plurality of electrodes 61 that move outward and inward as a whole are mounted on the housing units 72a, 72b, and the electrodes 61 are accurately brought into contact with the body tissue. Also, for example, if the pressure from the luminal organ is stronger than the momentum (momentum) of the spring 72s, the housing units 72a, 72b move to close them as needed, so that the capsule-type medical device C5 can be stably advanced.
Fig. 12A to 12C show a modification example of the electrode 61. The electrode 61a is a hemispherical electrode protruding from the outer surface of the housing unit 72A, 72b, as shown in fig. 12A. With such an electrode, contact with body tissue becomes easy. Moreover, since there is no angle, the capsule-type medical device C5 is smoothly advanced in the luminal organ.
The electrode 61B is a cylindrical electrode protruding from the outer surface of the housing unit 72a, 72B, as shown in fig. 12B. With such an electrode, the contact area with the body tissue is enlarged, so that the electrical stimulation can be accurately provided even to the body tissue such as the mucous membrane.
The electrode 61C is an electrode embedded in the housing units 72a, 72b so that the electrode is smoothly continuous with the outer surfaces of the housing units 72a, 72b, as shown in fig. 12C. With such electrodes, there is no portion protruding from the outer surface of the housing units 72a, 72b, and therefore smooth advancement of the capsule-type medical device C5 is achieved.
In practice, although this structure is not shown, the entire housing units 72a, 72b may be made into electrodes. In this case, the protrusion of the electrode is eliminated, and therefore, more smooth advancement of the capsule-type medical device C5 in the luminal organ is achieved while maintaining a stable electrode contact area.
Here, after the casing units 72a, 72b start operating, the casing units 72a, 72b may be engaged in the housing 13.
A water-absorbent gel may be installed between the housing units 72a, 72b and the housing 13 instead of the spring 72 s. When the capsule type medical device C5 having the water-absorbent gel is introduced into the living body, the water-absorbent gel swells by absorbing water in the living body, which moves the housing units 72a, 72b outward, making it possible to accurately change the distance between the electrodes 61 with a simple structure. As another structure, the spring 72s may be made of a shape memory alloy, and the spring 72s may expand in accordance with the temperature in the living body, thereby moving the housing units 72a, 72 b.
Fig. 13A to 15 show a fifth modified example.
The capsule type medical device C6 includes a large number of electrodes and flexible wires, and a device for selecting electrodes to be supplied with electric current (electrode selector).
As shown in fig. 13A and 13B, a large number of electrodes 6 and flexible wires 7 are provided at the rear of the housing 14 at substantially the same intervals in the capsule type medical device C6 along the periphery of the housing 14. The base ends of these flexible wires 7 are connected to an electrode selector provided in the housing 14. The electrode selector 6s is controlled by the control unit 3 to select a pair of electrodes to which a current is to be supplied from the plurality of electrodes 6. The current from the control unit 3 is supplied to the pair of electrodes 6 through the electrode selector 6s and the flexible wire 7.
Fig. 14A to 14E show a sixth modified example of the electrode 6.
The electrode 6 shown in fig. 14A is approximately spherical. The electrode 6a shown in fig. 14B has a hook shape. The electrode 6b shown in fig. 14C has a ring shape. The electrode 6c shown in fig. 14D is rod-shaped. The electrode 6d shown in fig. 14E is widened to secure a larger contact area. Different electrodes are selected according to the usage pattern of the capsule type medical device C6.
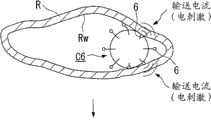
Fig. 15A to 15C show a state where the capsule type medical device C6 having the above structure reaches the large intestine R. In a relatively large luminal organ such as the large intestine R, it is often necessary to move not only anteriorly and posteriorly, but also left and right, the capsule-type medical device C6 to change the field of view. When the capsule-type medical device C6 is moved left and right, the capsule-type medical device C6 is advanced in the combined forward and backward and left and right directions by selecting the electrode 6 in the direction opposite to the desired advancing direction and bringing the electrode to which the current is supplied into contact with the lumen wall (intestinal wall Rw). Here, the selection of the electrode 6 in contact with the intestinal wall Rw is achieved by supplying a very weak test current to each electrode 6 and measuring the impedance at each time to find the electrode 6 in contact with the intestinal wall Rw.
In the capsule type medical device C6, a plurality of electrodes 6 and flexible wires 7 are provided in the housing 14, and an electrode to which a current is to be supplied is selected from the plurality of electrodes 6. Here, the left-right movement of the capsule-type medical device C6 is ensured, enabling observation at various possible positions within the luminal organ.
Fig. 16 shows a sixth modification example.
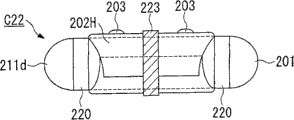
The capsule type medical device C7 includes electrodes provided on substantially the entire surface of the housing units 72a, 72b, wherein the electrodes are divided into a plurality of groups of the plurality of electrodes 61 d. An electrode to which a current is to be supplied is arbitrarily selected among the plurality of electrodes 61 d.
The plurality of electrodes 61d are planar electrodes densely arranged on the outer surfaces of the case units 72a, 72 b. A set of positive and negative electrodes to be paired is provided with a plurality of positive electrodes and a plurality of negative electrodes separated by poles (pole). The plurality of electrodes 61d are connected to an electrode selector 6s2 provided in the housing 13. As with the electrode selector 6s in the above-described capsule-type medical device C6, the electrode selector 6s2 is a device capable of arbitrarily selecting an electrode to which a current is to be supplied among the plurality of electrodes 61 d. The electrode selector 6s2 selects one or more sets of positive and negative electrodes to be paired, and supplies current to all the selected electrodes at the same time. If a smaller number of electrodes are selected by electrode selector 6s2, the area of the electrodes that provide electrical stimulation to the body tissue is smaller, whereas if a larger number of electrodes are selected, the electrode area is larger.
In the capsule type medical device C7, the electrode area for providing electrical stimulation to body tissue changes with the pole by which the optimal position of the electrode can be selected and the optimal electrode area can be secured. This makes it possible to easily supply a desired amount of current to the body tissue. Thus, for example, the electrode area for delivering the amount of current required for effective contraction of the intestine is ensured, and at the same time, an electrode having a favorable contact state with body tissue such as the inner intestinal wall can be selected.
A second embodiment of the present invention is explained with reference to fig. 17A to 25B. Here, the same symbols are used to denote structural elements similar to those in the first embodiment, and detailed description thereof is omitted.
As shown in fig. 17A to 20B, a capsule-type medical device C10 is a basic structure of the capsule-type medical device in the present embodiment. The capsule type medical device C10 can arbitrarily deploy and wind the flexible wires and electrodes in the medical device C10 as in the above-described first embodiment. In fact, the capsule type medical device C10 is provided with a motor (actuator) M and a rotating shaft 22r driven by the motor M, instead of the freely rotating shaft 21 r.
Two motors M are respectively provided in the housing 12 near the wire storage unit 21, and are controlled by the control unit 3. The rotational driving power of these motors M is transmitted to the rotating shaft 22r by power transmission means such as gears. In other words, the motor M and the rotary shaft 22r constitute a unwinding/winding mechanism of the flexible wire 7. The motor M is controlled by an external control signal and drives the electrodes 6 by unwinding flexible wires at arbitrary positions. Alternatively, the motor M stores the flexible wire 7 and the electrodes 6 completely within the wire storage unit 21 by winding the flexible wire 7. For the motor M, any motor/actuator such as an electromagnetic motor, an ultrasonic motor, or an electrostatic motor may be used.
Here, unlike the above-described capsule-type medical device C4, the capsule-type medical device C10 does not deploy/wind the flexible wire by utilizing an automatic shape change of the flexible wire. Therefore, as with the capsule type medical device C1, the flexible wire 7 made of a super-elastic alloy or the like is used, and a shape memory alloy is not used for the flexible wire.
Fig. 17A and 17B show a state in which almost all of the flexible wires 7 are wound, and thus the electrodes 6 and the flexible wires 7 are completely stored in the wire storage unit 21. The flexible wire 7 is kept in this state when the capsule type medical device C10 is swallowed or it is ejected from the anus, which will be further described later. Meanwhile, the following states are shown in fig. 20A and 20B: the flexible wire 7 is fully deployed and the electrodes 6 and flexible wire 7 are in operation. When the capsule type medical device reaches the stomach or the like, the flexible wire 7 is in this state, which will be further described later.
Here, the amount of unwinding and winding of the flexible wire 7 can be arbitrarily changed by controlling the motor M, and for example, the following states can be produced: the flexible wire 7 is slightly unfolded from the fully stored state so that only the electrode 6 protrudes from the opening 21h, as shown in fig. 19.
Next, observation in a living body of a human using the capsule-type medical device C10 having the above-described structure will be described.
First, the person under examination wears the external device 100 using a belt or the like. The person then eats the capsule-type medical device C10 from the mouth to deploy the capsule-type medical device C10 in vivo. Before swallowing the capsule-type medical device C10, the flexible wire 7 and the electrodes are completely stored in the wire storage unit 21, as shown in fig. 17A and 17B. This minimizes the obstruction that may be caused by the flexible wire 7 and the electrode 6 during swallowing of the capsule-type medical device C10. A switch, not shown, is provided in the capsule type medical device C10. The switch is turned on when the capsule-type medical device C10 is swallowed, so that power can be supplied from the battery 5 to the respective components. Thereby, the control unit 3 drives the photographing unit 2 (i.e., the photographing element 2a and the light emitting element 2 b).
The capsule type medical device C10 introduced into the living body photographs a part inside the living body using the photographing element 2a as the device moves inside the digestive tract. At the same time, it transmits the photo image from the wireless transceiver unit 4 to the external device 100. Meanwhile, the external device 100 receives these photo images through the wireless transceiver unit 102, and performs image processing on the photo images always recorded in the recording unit 103 using the control unit 104. The control unit 104 always transmits a control signal corresponding to the body tissue (for example, the stomach, the small intestine, or the large intestine) in which the capsule type medical device C10 (the position of which is detected by the position detecting circuit 104 a) is present through the wireless transceiver unit 102.
When the capsule type medical device C10 reaches the stomach (see fig. 21(1)), the photographing element 2a photographs in the stomach and transmits the photograph image to the external device 100 (see fig. 22 (1)). The position detection circuit 104a confirms that the capsule-type medical device C10 is located in the stomach by comparing the received photograph image with the setting image in terms of brightness, color frequency distribution, surface state of the mucous membrane, and the like. Since the stomach is an organ with a large lumen, the control unit 104 drives the electrodes 6 and the flexible wires 7 to their maximum capacity, as shown in fig. 21 and 22. Also, the control unit 104 sends control signals through the wireless transceiver unit 102 to provide electrical stimulation to the body tissue through the electrodes 6. By such electrical stimulation, the peristalsis of the stomach is induced and local muscle contractions are generated. The capsule type medical device C10 is pushed by the peristaltic motion of the stomach and local muscle contraction, through the stomach, and then to the duodenum.
When the capsule type medical device C10 reaches the duodenum, the photographing element 2a photographs in the duodenum and transmits the photograph image to the external device 100. The position detection circuit 104a confirms that the capsule-type medical device C10 is located in the duodenum by comparing the received photographic image with the setting image. In response, the control unit 104 sends a signal to wind the flexible wire 7 through the wireless transceiver unit 102. The capsule type medical device C10 winds the flexible wire 7 upon receiving the control signal, and then slightly unwinds the flexible wire 7 from the wire storage unit 21, leaving only the electrode 6 protruding from the opening 21 h.
When the capsule type medical device C10 passes through the duodenum and reaches the small intestine (see fig. 21(2)), the photographing element 2a photographs in the small intestine and transmits the photograph image to the external device 100 (see fig. 22 (2)). The position detection circuit 104a confirms that the capsule-type medical device C10 is located in the small intestine by comparing the received photographic image with the setting image in a similar manner to the above. In response, the control unit 104 sends a signal through the wireless transceiver unit 102 to provide electrical stimulation to the body tissue through the electrodes 6 or to wrap the flexible wire 7 as needed. The capsule type medical device C10, upon receiving the control signal, supplies electrical stimulation to the body tissue through the electrodes 6 or winds or unwinds the flexible wire 7 as necessary. Thus, the operator pushes the capsule type medical device C10 by providing electrical stimulation to body tissues (e.g., stomach, small intestine, large intestine, etc.) as needed while viewing the photographic image. In fact, a rapid change in the photographic image indicates that the capsule-type medical device C10 is moving too fast. Therefore, the operator reduces the number of times the current is supplied to the electrode 6 to reduce the speed of the capsule-type medical device C10. On the other hand, the photographic image hardly changed indicates that the capsule-type medical device C10 hardly moved. Accordingly, the operator increases the frequency of supplying the current to the electrode 6, which increases the moving speed of the capsule-type medical device C10.
When the capsule type medical device C10 is located in the small intestine, the wireless transceiver unit 4 receives a control signal transmitted from the external device 100. The control unit 3, upon receiving these signals, controls the amount of current to be supplied to the electrodes 6 or the operation of the motor M. The electrodes 6, upon receiving the current, provide electrical stimulation to the body tissue (intestinal wall) to contract the body tissue. By contraction of the body tissue, the capsule type medical device C10 moves forward as if pushed out. Therefore, the capsule type medical device C10 can be moved more accurately in the small intestine than in the case of moving by autonomous peristalsis, enabling effective observation in the small intestine with a shorter observation time.
When the capsule type medical device C10 passes through the small intestine and reaches the large intestine (see fig. 21(3), (4)), the photographing element 2a takes a picture in the large intestine and transmits the picture image to the external device 100 (see fig. 22(3), (4)). The position detection circuit 104a confirms that the capsule-type medical device C10 is located in the large intestine by comparing the received photographic image with the setting image in a manner similar to the above. In response, the control unit 104 drives the electrodes 6, provides electrical stimulation from the electrodes 6 to the body tissue, and sends signals through the wireless transceiver unit 102. Upon receiving these signals, the control unit 3 starts the motor M and drives the electrodes 6. At this time, unlike in the stomach, the electrode 6 is not operated at maximum capacity, and the flexible wire is deployed longer than in the small intestine. This is because the luminal organ of the large intestine is larger than the small intestine, but much smaller than the stomach. Thus, in the large intestine having a lumen organ larger than the small intestine, the electrode 6 is accurately attached to the body tissue, and the body tissue (intestinal wall) is electrically stimulated. Therefore, in a manner similar to that in the small intestine, effective and stable observation in the large intestine is achieved with a shorter observation time.
When the capsule type medical device C10 passes through the large intestine and reaches the anus (near the rectum) (see fig. 21(5)), the photographing element 2a photographs inside the anus and transmits the photograph image to the external device 100 (see fig. 22 (5)). The position detection circuit 104a confirms that the capsule type medical device C10 is located in the anus (near the rectum) by comparing the received photographic image with the setting image in a manner similar to the above. In response, the control unit 104 stores the electrode 6 and the flexible wire 7 completely, and sends a signal through the wireless transceiver unit 102 to stop the electrical stimulation by the electrode 6. The control unit 3, upon receiving these signals, starts the motor M and restores the initial state by storing the electrodes 6 and the flexible wires 7 completely in the wire storage unit 21. This improves the discharging capability of the capsule-type medical device C10 after completion of observation.
Alternatively, the ejection may be actively controlled by allowing the electrodes 6 to extend slightly above the outer surface of the capsule-type medical device to provide electrical stimulation within the rectum at the desired timing of the ejection (e.g., when a visit to a washroom is desired). In this case, when the preparation for discharge is completed in the toilet, the discharge of the capsule-type medical device C10 is successfully achieved.
Also, a notification device for sending the positioning of the capsule type medical device C10 at the anus (near the rectum) is provided inside the external device 100, thereby indicating the discharge timing to a doctor or the like, which can improve the usability of the device.
Meanwhile, a doctor or the like diagnoses the physical condition of the patient based on the in-vivo information (i.e., the photographic image) recorded in the recording unit 103 of the external device 100.
In the capsule medical device C10, the rotation of the rotating shaft 22r is driven using the motor M controlled by the control unit 3. Therefore, the unwinding and winding of the flexible wire 7 is arbitrarily performed by the control of the control unit 3, so that the distance between the electrodes 6 can be arbitrarily changed at an arbitrary position. Thereby, even if the area of the luminal organ varies from organ to organ, it can be easily coped with by changing the length of the flexible wire 7, so that electrical stimulation can be accurately provided regardless of the position. Also, the motor M drives only the unwinding/winding of the thin flexible wire, and thus the power consumption is small. Therefore, the motor M does not place a large burden on the capsule-type medical device C10 driven by the battery.
Hereinafter, a modified example of the capsule type medical device C10 in the above-described second embodiment will be explained. Here, the respective structural elements of the capsule-type medical device C10, such as the photographing unit 2 (photographing element 2a and light emitting element 2b), the control unit 3, the wireless transceiver unit 4, and the battery 5, are common structural elements provided in the following respective modified examples of the capsule-type medical device in a similar manner. Therefore, in the following examples, the representation and detailed description of these structural elements are omitted. Also, other structural elements similar to those in the capsule-type medical device C10 are denoted by the same symbols, and detailed description thereof is omitted.
Fig. 23A and 23B show a first modification example. In the capsule type medical device C11, a pair of electrodes are directly fixed to a case, and a weight is provided on the side of the case where the electrodes are fixed.
The wire storage unit 21 is formed in a groove at one position of the rear of the housing 16, and pushes in the electrode 6 and the flexible wire 7 through the hole unit 21h and pushes out the electrode 6 and the flexible wire 7 to the outside. At the rear side of the case 16, on the diametrically-across opposite side of the line storage unit 21, a fixed electrode (electrode) 62 paired with the electrode 6 is mounted on the outer surface of the case 16 as a whole. The flexible wire 7 and the electrode 6 are connected to the control unit 3 within the housing 16. A weight G is provided inside the housing 16 on the diametrically opposite side of the wire storage unit 21. Thus, the fixed electrode 62 side can be always made to face downward, and therefore the fixed electrode 62 can be accurately brought into contact with the mucous membrane or the like.
In the capsule type medical device C11, since the wire storage unit 21 and the motor M are one unit, the structure is simple, and the control of unwinding and winding of the flexible wire 7 is easily and accurately performed.
Here, in this example, the weight G is provided to ensure contact of the fixed electrode 62 with the mucous membrane or the like, but the weight G may be omitted by changing the arrangement of the parts within the housing 16 so that the center of gravity is shifted to a position on the fixed electrode 62 side.
Fig. 24 shows a second modification example. In the capsule medical device C12, a pair of electrodes is attached to the front portion of the capsule medical device C.
The base end of the front flexible wire 9 is supported at the front side (the other edge side along the axis L) of the housing 16 but at the rear side of the transparent dome 1 d. The front flexible wires 9 extend outwardly from the housing 16 in such a manner that the wires move outwardly away from the housing 16 and support the front electrodes 8. In other words, the electrode 8 is disposed on the front side of the housing 16, separated from the photographing unit 2, by the flexible wire 9. Therefore, the electrode 8 does not interfere with the imaging by the imaging unit 2. Here, the front flexible wires 9 are disposed on the same side of the wire storage unit 21.
Further, on the outer surface of the transparent dome 1d, on the opposite side across the diameter of the front-side electrode 8 (i.e., on the same side as the fixed electrode 62), a front-side fixed electrode (second electrode) 82 paired with the front-side electrode 8 is mounted as one unit. The front fixed electrode 82 is provided at a position outside the field of view V of the imaging element 2a so as not to interfere with imaging by the imaging unit 2. Here, the front-side fixed electrode 82 may be a transparent electrode, and may be disposed within the visual field V. In this case, an electrode having a position and a size which are more easily in contact with body tissue may be used.
The front flexible wire 9 and the front fixed electrode 82 are connected to the control unit 3 (shown in fig. 2) inside the housing 1. Here, the control unit 3 has a function as second control means for controlling the currents to be supplied to the front side electrode 8 and the front side fixed electrode 82 in accordance with the control signal from the wireless transceiver unit 4, regardless of the control of the currents to be supplied to the electrode 6 and the fixed electrode 62.
Further, a weight G is provided inside the housing 16 on the diametrically opposite side of the wire storage unit 21 so that the fixed electrode side always faces downward. Here, accurate contact of the fixed electrode 62 and the front-side fixed electrode 82 with the mucous membrane or the like is achieved.
Here, when the capsule-type medical device C12 is swallowed, it is preferable to swallow backward in order to prevent the anterior electrode 8 and the anterior flexible wire from becoming obstacles.
In the capsule type medical device C12, in addition to the electrode 6 and the fixed electrode 62 provided on the rear side of the housing 16, the front side electrode 8 and the front side fixed electrode 82 are provided on the front side, and the current to each electrode is independently controlled. For this reason, each of the wire storage unit 21 and the motor M is made one unit, so that the structure is simple while achieving free movement of the device within the body tissue. In other words, the forward movement of the capsule-type medical device C12 is achieved by causing the electrode 6 and the fixed electrode 62 provided on the rear side of the housing 16 to provide electrical stimulation to the body tissue. Conversely, the backward movement of the capsule-type medical device C12 is achieved by causing the front-side electrode 8 and the front-side fixed electrode 82 provided on the front side of the housing 16 to supply electrical stimulation to the body tissue. Thus, the operator can move the capsule-type medical device C12 forward or backward as necessary in a lumen organ such as a small intestine or a large intestine while viewing a photographic image, for example, which improves operability. Moreover, the operator can easily manipulate the device regardless of the direction (anterior or posterior) in which the capsule type medical device C12 enters the stenotic luminal organ. Furthermore, since both forward and backward movements are available, any possible position in the luminal organ can be observed.
Next, fig. 25A and 25B show a third modification example. In the capsule type medical device C13, the wire storage unit and the mechanism for unwinding and winding the flexible wire are different from those of the above-described capsule type medical device C10.
In the capsule type medical device C13, a wire storage unit 26 for storing the flexible wire 7 and the electrode 6 is formed inside the housing 17. The wire storage unit 26 is formed as a space at a position near the rear of the housing 17 (i.e., in the tapered portion), and allows the electrode 6 and the flexible wire 7 to appear and disappear to the outside through the opening 26 h. The openings 26h are formed at positions where these openings are symmetrical to each other with respect to the axis L of the housing 17. In the wire storage unit 26, a substantially disk-shaped rotating table 26r is supported as follows: its axis of rotation is substantially the same as the axis L and is free to rotate. The base ends of the flexible wires 7 are connected to two positions symmetrical to each other with respect to the axis L on the outer circumferential side of the rotating table 26r, respectively. In other words, the current from the control unit 3 flows to the electrode 6 through the rotating stage 26r and the flexible wire 7.
The rotary table 26r is connected to a motor (actuator) M2 provided further than the wire storage unit 26. The movement of the motor M2 is controlled by the control unit 3. The rotational driving force from the motor M2 is transmitted to the rotary table 26 r. In other words, the motor M2 and the rotating table 26r constitute a mechanism for unwinding/winding the flexible wire 7. In the unwinding/winding mechanism using such a mechanism, the movement of the motor M2 is controlled by an external control signal, and the electrode 6 is operated by unwinding the flexible wire 7 at an arbitrary position. Alternatively, the flexible wire 7 and the electrode 6 may be completely stored in the wire storage unit 26 by winding. Any motor/actuator such as an electromagnetic motor, an ultrasonic motor, an electrostatic motor, or the like is used as the motor M2.
In the capsule type medical device C13, since one motor M2 is caused to perform the entire deployment/winding of the pair of flexible wires 7 and the electrodes 6, the structure is simple, and the control of the deployment/winding is easy and accurate. Also, since the wire storage unit 26 and the motor M2 are disposed in the taper portion near the rear of the housing 17, which tends to become a dead space, the limited space in the housing 17 is effectively utilized.
Here, in each of the above embodiments, the description is given using an example in which the present invention is applied to a wireless capsule type medical device. However, the present invention may be applied to a wired capsule type medical device that supplies electric power using a cable or the like. Thus, it is not necessary to mount a battery on the capsule type medical device, or to make the battery smaller or low in capacity. Moreover, in most cases, the cables used to provide power can be thin, which minimizes discomfort to the person under examination and minimizes the concern that the cables will become an obstruction within the luminal organ.
Moreover, in each of the above embodiments, a description is given of a structure in which an in-vivo information acquisition apparatus for acquiring in-vivo information (e.g., an image) is provided. However, in addition to such in-vivo information acquisition means, a medication device for administering a drug at a desired portion, a treatment device for burning a diseased portion, an extraction device for extracting body fluid, or the like may be provided as necessary. The use of such a capsule type medical device enables medication, treatment, or sampling after acquiring in vivo information. Therefore, a series of different operations can be performed in a living body using only one capsule type medical device.
A third embodiment of the present invention will be described below with reference to fig. 26 to 40.
In this embodiment the elastic expansion means form the inter-electrode distance variation means. A capsule-type medical device C14 shown in fig. 26 is a basic structure of the capsule-type medical device of the present embodiment. This capsule type medical device C14 is provided with a capsule main body (device main body or housing) 201, a balloon (elastic expansion portion) 202, at least one pair of bipolar electrodes 203, a lead wire 204, a battery (power source) 5, and an expansion and contraction mechanism unit (expansion device) 16. The airbag 202 is mounted on at least a portion of the bag main body 201, and is capable of being elastically expanded. Electrodes 203 are mounted on balloon 202 and provide electrical stimulation to the collapsible tissue (body tissue) in the living body cavity.
The capsule main body 201 is provided with a photographing unit (in-vivo information acquiring device) 212 that acquires in-vivo information in a living body cavity, a control unit (control device) 213, a wireless transceiver (communication device) 214, and a battery (power supply) 205 inside a housing 211, and has a function of a capsule type endoscope. In addition, an inflation and deflation mechanism unit 216 that inflates and deflates the airbag 202 is also provided in the housing 211.
The housing 211 is a bag having an oval shape when viewed from the side, and is formed of plastic or the like to seal the inside thereof. A viewing window (not shown in fig. 26) formed in a dome shape made of a transparent material is provided on the front (right side in the drawing) of the housing 211. In the observation window, that is, in front of the capsule main body 201, an imaging unit 212 that acquires in-vivo information in the body cavity is housed. The photographing unit 212 is provided with a photographing element unit 212a for photographing various regions in the living body cavity and acquiring images, and a light emitting element 212b for illuminating a field of view of the photographing element unit 212a by emitting illumination light, and in-vivo information is obtained by acquiring a photographic image in the living body cavity. The imaging element 212a is composed of a lens, a CCD (charge coupled device), and the like. The light-emitting element 212b is composed of an EL (electroluminescence) element, an LED (light-emitting diode), or the like. In addition to the photographing unit 212, various sensors (e.g., a pH sensor, a hemoglobin sensor, a special light reaction sensor, etc.) may be provided as the in-vivo information acquisition means in the observation window as necessary.
The wireless transceiver unit 214 is provided with a transceiver unit main body (not shown) and a transceiver antenna (omitted from the drawing) that transmits and receives radio waves. The wireless transceiver unit 214 wirelessly transmits in-vivo information (i.e., a photographic image taken by the photographing unit 212) to an external device 300 described below. In addition, the wireless transceiver unit 214 wirelessly receives various control signals (instructions) wirelessly transmitted from the external device 300 and transmits them to the control unit 213.
The control unit 213 has the following functions: the actions of the respective units of the capsule type medical device C14 are comprehensively controlled in accordance with control signals (instructions) from the wireless transceiver unit 214. Specifically, the unit performs wireless transceiver control (controlling the operation of the wireless transceiver unit 214), photographing and lighting control (controlling the operation of the photographing unit 212), and inflation and deflation control of the airbag 202 (controlling the operation of the inflation and deflation mechanism unit 216). In addition, a square wave (pulse) generating circuit 213a for supplying current from the battery 205 to the electrodes 203 via the wires 204 is provided in the control unit 213. In other words, the control unit 213 has a function of a control device for controlling the current flowing to the electrode 203, as described below. The square wave generating circuit 213a includes a limiter function, which ensures that a current exceeding a set value does not flow to the electrode 203.
In fig. 26, the square wave generation circuit 213a is provided integrally with the control circuit 13, but may be provided integrally with the battery 205.
The airbag 202 is disposed in the bag main body 201 so as to cover at least a part of the outer surface of the housing 211. The airbag 202 is constituted by an elastic membrane (made of an elastic material exhibiting elasticity, for example, flexible rubber), and is expanded and contracted by an expansion and contraction mechanism unit 216 provided inside the housing 211. The expansion and contraction mechanism unit 216 expands the air bag 202 by supplying a fluid such as air or a foaming agent into the air bag 202, and contracts the air bag 202 by sucking the fluid out of the air bag 202. The balloon 202 is in sufficiently close contact with the outer surface of the housing 211 when deflated, so that the balloon body 201 is easily inserted into the living body cavity via the mouth or anus.
In fig. 26, the front and rear portions of the capsule main body 201 are exposed, the airbag 202 covers the capsule main body 201 to cover the outer periphery of the middle portion, and the airbag 202 is fixed to the capsule main body 201 in a substantially ring shape at two fixing units 220 at the front and rear portions of the capsule main body 201. However, it is also possible to expose only the front portion of the bag main body 201 where the observation window is provided, and almost the entire surface of the rear face thereof is covered with the airbag 202. In this case, the airbag 202 is fixed to the bag main body 201 at one fixing unit 220 disposed behind the observation window of the front portion of the bag main body 201.
On the outer surface of the balloon 202, at least one pair of bipolar electrodes 203 is mounted. These electrodes 203 contact the inner walls of the small and large intestines (i.e., contractile tissue) and provide electrical stimulation to these contractile tissue. The shape of the electrode 203 is substantially hemispherical or substantially planar so as not to interfere with the forward movement of the capsule-type medical device C14. In this way, the at least one pair of electrodes 203 is provided in an integrated manner with the balloon 202, and thus the distance between the pair of electrodes 203 changes with the expansion and contraction of the balloon 202. Thus, precise electrical stimulation may be provided to contractile tissue within the luminal organ even if the diameter of the lumen changes. These electrodes 203 are preferably made of a metal (e.g., stainless steel, platinum, titanium, etc.) or a conductive material (e.g., conductive rubber, etc.) that is highly compatible with the living body, as described below.
In fig. 26, a total of two pairs of electrodes 203 are provided, one pair each being provided on the front side (right side in the drawing) and on the rear side (left side in the drawing), but the number of electrodes mounted and the mounting positions thereof may be changed as appropriate.
The lead 204 is at least partially constructed of a flexible, electrically conductive material such as a metal or the like. The base end of the lead 204 is connected to the square wave generating circuit 213a in the housing 211, and the tip end is connected to the electrode 203. That is, the electrodes 203 are mechanically and electrically connected to the capsule body 201 that houses the battery 205. Because of this use of the flexible wire 204, the wire 204 accommodates the contraction of the balloon 202 in a folded state, while the wire 204 stretches when the balloon 202 is inflated. Accordingly, power can be constantly supplied from the square wave generating circuit 213a in the control unit 213 to the electrodes 203.
When the balloon 202 is deflated, the outer diameter of the capsule type medical device C14 constructed as described above is about 15mm, so that the device is easily passed through the digestive tract and anus. In addition, the outer diameter of the balloon-type medical device C14 is approximately 40mm when the balloon 202 is inflated to its maximum size, so that the electrodes 203 are in proper contact with body tissue as the device passes through the large intestine.
The external device 300 controls the capsule type medical device C14 from the outside of the living body. As shown in fig. 26, the external device 300 is provided with: a wireless transceiver unit (transmitting unit and detecting unit) 302 for transmitting and receiving information to and from the capsule-type medical device C14; a recording unit 303 (e.g., a memory or the like) for storing the above-described in-vivo information (i.e., photographic image); a control unit 304 that controls each unit; and a battery 305 that supplies power to the respective units, all of which are within the apparatus main body 301.
The apparatus main body 301 is formed in a box shape from plastic or metal such as aluminum, and can be mounted on the body of the examinee by the examinee's belt. Thereby, the examinee can always mount the external device 300 on his body.
Similar to the wireless transceiver unit 4 of the capsule type medical device C14, the wireless transceiver unit 302 is provided with a transceiver unit main body, not shown, and transceiver antennas (a transmitting antenna and a receiving antenna) for transmitting and receiving radio waves. The wireless transceiver unit 302 receives a photographic image, i.e., in-vivo information wirelessly transmitted from the capsule type medical device C14, and transmits it to the control unit 304.
The control unit 304 transmits a control signal to the capsule type medical device C14 via the wireless transceiver unit 302 according to body tissue (for example, the stomach, the small intestine, or the large intestine) around the capsule type medical device C14 located in the living body. In addition, the control unit 304 records the received photographic image in the recording unit 303 as necessary after executing prescribed processing such as image processing and the like.
The following is a case where the body cavity of the examinee is observed and studied using the capsule-type medical device C14 configured as described above.
First, the examinee mounts the external device 304 to his abdomen or elsewhere by a belt or the like. Then, the capsule type medical device C14 is introduced into the living body cavity by inserting the capsule type medical device C14 into the mouth (swallowing). When inserted from the mouth, the balloon 202 contracts so as not to be an obstacle. In addition to photographing various portions inside the living body cavity by the photographing element unit 212a while moving down the digestive tract, a photographic image is wirelessly transmitted from the wireless transceiver unit 214 to the external device 300. On the other hand, the external device 300 receives a photo image via the wireless transceiver unit 302, performs image processing and the like on the photo image through the control unit 304, and records the image in the recording unit 303 as necessary. The control unit 304 transmits a control signal for controlling the capsule-type medical device C14 to the capsule-type medical device C14 via the wireless transceiver unit 302 as needed.
When the capsule-type medical device C14 has passed through the stomach and duodenum and reached the small intestine, the control unit 213 inflates the balloon 202 by a control signal from the external device 300 and propels the capsule-type medical device C14 by providing appropriate electrical stimulation to the inner wall of the small intestine. In the small intestine, the balloon 202 is inflated to about 5-15mm, and the outer diameter of the capsule-type medical device C14 (the outer diameter of the capsule main body 201 together with the balloon 202) becomes about 20-30mm, so that the electrodes properly contact the inner wall of the small intestine.
In order to provide electrical stimulation to and contract the contractile tissue of the small intestine and use the contractile force as a thrust force for the capsule-type medical device C14, several to several tens of milliwatts are generally required. Accordingly, the square wave generating circuit 213a causes a square wave current of several milliwatts to several tens of milliwatts to flow to the electrode 203 in pulses of a predetermined period. Specifically, the frequency at this time is several Hz to several tens Hz, and the pulse width is set at several milliseconds to several tens milliseconds. It is also possible to use a signal modulated by a high-frequency signal of several khz to several tens of khz as the pulse signal. This modulated wave signal outputs a pulse of several kilohertz to several hundred kilohertz in a cycle of several hertz to several tens of hertz.
The waveform of the pulse wave may be square or sinusoidal. In addition, the square wave may be a waveform that is normally output only in positive or negative, and as shown in fig. 27A, may be a waveform in which the output is inverted and output on both the negative side and the positive side (double-sided amplitude). Further, the sinusoidal waveform may be a waveform whose one side is rectified, as shown in fig. 27B. The square wave generating circuit 213a outputs a signal having a waveform in which various waveforms described above are combined, and provides electrical stimulation to body tissue.
When such electrical stimulation is supplied to the inner wall of the small intestine, the stimulated portion of the small intestine contracts, and thus the capsule type medical device C14 is pressed to advance along the contracted small intestine. At this time, since the balloon 202 and the lead 204 are elastically deformed according to the contraction of the small intestine, the change in the diameter of the small intestine can be accurately offset. Thereby, it is possible to move through the small intestine by accelerating the peristalsis of the small intestine, and it is possible to effectively observe and study the inside of the small intestine while shortening the time required for observation. When the capsule-type medical device C14 has reached its target position, the capsule-type medical device C14 may be stopped at the target position by stopping the electrical stimulation. At this time, the balloon 202 may be inflated after stopping the electrical stimulation, thus increasing the contact pressure with the small intestine to more accurately stop the capsule-type medical device C14.
In this manner, the capsule type medical device C14 may then also pass through the large intestine as discussed above. When passing through the large intestine, the balloon 202 is inflated to 5-25mm, so that the outer diameter of the capsule-type medical device C14 becomes So that the electrode accurately contacts the inner wall of the large intestine. When the capsule-type medical device C14 approaches the anus, the
So that the electrode accurately contacts the inner wall of the large intestine. When the capsule-type medical device C14 approaches the anus, the balloon 202 is contracted similarly to when the device is inserted from the mouth, so that the outer diameter of the capsule-type medical device C14 becomes smaller, whereby the device can be discharged from the anus.
Next, the doctor diagnoses the health condition of the examinee based on the photographic images, which are in-vivo information recorded in the recording unit 303 of the external device 300.
In this capsule type medical device C14, the electrodes 203 can be brought into contact with the inner wall of the digestive tract having different diameters accurately by inflating the balloon 202 at a desired position. In addition, since the leads 204 are flexible, they can accommodate the expansion and contraction of the balloon 202 and can provide stable electrical stimulation with little inconvenience such as disconnection or the like. In addition, by stopping the electrical stimulation at the target position, or inflating the balloon 202 after stopping the electrical stimulation, the capsule-type medical device C14 can be stopped at the position, and then the position can be observed and studied in detail by various sensors. Further, by contracting the balloon 202 on the discharge side after completion of observation and study, it is possible to move the device rapidly and discharge the device to the outside of the living body in a short time.
Next, a modification of the capsule type medical device C14 of the above-described third embodiment will be described. The constituent elements common to the respective constituent elements of the capsule-type medical device C14 are denoted by the same reference numerals, and detailed description thereof is omitted here. In addition, in the respective drawings referred to below, there are cases where illustration of the lead wire 204 is appropriately omitted, and in these cases, the respective electrodes 203 are electrically and mechanically connected to the capsule main body 201 via the lead wire, similarly to the above-described capsule-type medical device C14.
Fig. 28A and 28B show a first modification.
In this capsule-type medical device C15, the balloon 202A is detachably mounted on the capsule main body 201A by the mounting unit 220A. In addition, the lead 204 is detachably connected to the capsule body 201A by a connector 204C.
The capsule main body 201 is similar in construction to the capsule main body 201 in the above-described capsule-type medical device C14, except for the fact that the housing 211A is provided. The housing 211A differs from the housing 211 described above in that: it is provided with a groove 211g to make it easy to mount and move the airbag 202A; and a female connector 242 is formed on the rear surface. Reference numeral 211d denotes an observation window.
In a groove 211g formed in the housing 211A, the mounting unit 220A is formed by a detachable protruding unit 202t formed in the airbag 202A to be detachably engaged with the groove 211 g. In addition, the female connector 242 constitutes a connector 204C in a pair with a male connector 241 provided on the base end of the lead wire 204, and the lead wire 204 and the housing 211A are detachably connected by this connector 204C. Further, an electrode 203 is provided in an integrated manner outside the airbag 202, and the electrode 203 is composed of conductive rubber (made of conductive silicone rubber, conductive nylon, or the like).
Since the electrodes 203 are thus composed of the conductive rubber, when the balloon 202A is inflated, the electrodes 203 on the balloon 202A can be similarly elongated, and thus the balloon 202A can be inflated more uniformly.
In addition, since the capsule main body 201A, the balloon 202A, the electrode 203, and the lead wire 204 are detachably attached, it is easy to replace the balloon 202A, the electrode 203, and the lead wire 204 with optimal items according to the use condition of the capsule-type medical device C15. Furthermore, the relatively expensive balloon body 201A may be reused, while the relatively inexpensive balloon 202A, electrodes 203 and leads 204 are simply discarded after each use.
Fig. 29A and 29B show a second modification.
This capsule type medical device C16a is an example in which a hard member is provided in the balloon. The hard member is formed on a thick portion of a part of the above-described airbag 202, and is harder than the other portion.
In the capsule-type medical device C16a shown in fig. 29A and 29B, a balloon 202B1 is connected to the capsule main body 201 by a fixing unit 220 so as to cover a side of the capsule main body 201 toward the rear of the observation window 211 d. In this balloon 202B1, a hard member 221a is formed to form a ring on the rear side, and a plurality of electrodes 203 are mounted around the periphery of this hard member 221 a.
As described above, the balloon 202 is formed of a stretchable material such as flexible rubber, so that when the electrode 203 is formed of gold or other substantially non-stretchable material, the elongation of the two is significantly different. In other words, the mounting and holding of the electrode 203 on the balloon becomes difficult, and the arrangement cannot be used for a long time. Therefore, by forming a thick hard unit on the balloon at least in the region where the electrode 203 is mounted, the difference in elongation between the two can be reduced, so that the electrode 203 can be more easily mounted and held on the balloon.
Fig. 30 to 32 show a third modification.
These capsule-type medical devices C16b, C16C, and C16d are modifications of the capsule-type medical device C16a in which the hard members are formed at different positions on the balloon.
In the capsule-type medical device C16B shown in fig. 30, a balloon 202B2 is connected to a capsule main body 201 by a fixing unit 220 so as to cover a side of the capsule main body 201 toward the rear of an observation window 211 d. On both the front edge and the rear edge of this balloon 202B2, thick hard members 221B are formed, and a plurality of electrodes 203 are mounted around the outer periphery of this hard member 221B.
In addition, in the capsule-type medical device C16C shown in fig. 31, the balloon 202B3 is mounted to the capsule main body 201 through the fixing unit 220 so as to cover the side of the capsule main body 201 toward the rear of the observation window 211 d. Thick hard members 221c are formed on the top and bottom of the balloon 202B3 near the edges of the electrodes 203 and in the central region a predetermined distance from the top and bottom electrodes 203.
Further, in the capsule-type medical device C16d shown in fig. 32, the balloon 202B4 is mounted to the capsule main body 201 at two positions in the front and rear by the fixing unit 220 so as to cover the central portion of the capsule main body 201 while exposing the front and rear edges. On the outer periphery of this balloon 202B4, a thick hard member 221d is formed in a spiral shape, and a plurality of electrodes 203 are mounted on the outer periphery of this hard member 221 d.
In this way, the shape and positioning of the hard member can be changed as desired according to the number and arrangement of the electrodes 203 mounted on the balloon.
Fig. 33 and 34 show a fourth modification.
These capsule-type medical devices C16e and C16f are other variations of the capsule-type medical device C16a, and show the following examples: a separate hard member is provided on the airbag 202, and the hard member is harder than other regions.
In the capsule-type medical device C16e shown in fig. 33, a balloon 202B5 is mounted to a capsule main body 201 through a fixing unit 220 so as to cover the capsule main body 201 at the rear side of an observation window 211 d. In this airbag 202B5, a plurality of hard members 221e are provided on the rear side around the periphery. These hard members 221e are formed by coating the outer surface of the above-described airbag 202 with an adhesive and hardening it. The electrode 203 is mounted on each hard member 221 e.
In addition, in the capsule-type medical device C16f shown in fig. 34A and 34B, the balloon 202B6 is mounted to the capsule main body 201 through the fixing unit 220 so as to cover the capsule main body 201 at the rear side of the observation window 211 d. The airbag 202B6 is mounted with electrodes integrated with hard members 221f which are made of hard rubber harder than the airbag 202 and which are provided on the outer periphery of the rear side of the airbag 202.
In this way, a hard member made of a material different from that of the airbag 202 is mounted thereafter, and therefore, the structures of the airbag 202B5 and the airbag 202B6 are made simple and easy to manufacture.
Fig. 35 shows a fifth modification.
The capsule type medical device C17 is an example of: when the balloon is inflated, the longitudinal sectional shape (sectional shape when viewed from the front) is deformed.
The balloon 202C in the capsule type medical device C17 shown in fig. 35 is inflated so that the longitudinal section is star-shaped. An electrode 203 is provided at the tip of the star balloon 202C. When such a star-shaped balloon 202C is inflated, only the tip comes into contact with the inner wall of the lumen organ (here represented by the small intestine I). Between each of these ends, the balloon 202C has a recessed portion. As a result, between these depressed portions and the small intestine I, a space Ih extending forward and rearward of the capsule-type medical device C17 is formed along the inside of the small intestine I.
Since these spaces Ih are formed, the inside of the small intestine I is not blocked even when the balloon 202C is inflated. Thus, fluids, such as digested material, present in the small intestine I may flow appropriately along the length of the capsule-type medical device C17.
A capsule-type medical device C18 shown in fig. 36, a capsule-type medical device C19 shown in fig. 37, and a capsule-type medical device C20 shown in fig. 38 are all modifications of this capsule-type medical device C17. In each of these modifications, the longitudinal sectional shape of the capsule-type medical device is changed. These longitudinal sectional shapes at the time of inflation of the balloon can be appropriately changed depending on the purpose or condition of the examination.
Fig. 36 shows a sixth modification.
The balloon 202D in this capsule type medical device C18 is fixed by fixing units 220B, the fixing units 220B are formed at two positions (top and bottom positions in the drawing) at symmetrical positions on the outer periphery of the capsule main body 201, and when the balloon is inflated, the inflation is substantially symmetrical in the left and right directions. As a result, a space Ih passing from front to back along the capsule-type medical device C18 in the luminal organ is formed between the fixing unit 220B and the small intestine I.
Fig. 37 shows a seventh modification.
The balloon 202E in this capsule type medical device C19 is inflated so that the longitudinal section becomes an oval shape. As a result, a space Ih is formed between the long sides (top and bottom in the drawing) of the balloon 202E and the small intestine I.
This capsule type medical device C19 is provided with a capsule main body 201B and a power supply unit (power supply) 205A. The capsule body 201B here is the above-described capsule body 201B, but a battery and a square wave generating circuit for applying electrical stimulation to the electrodes 203 are omitted therefrom. In addition, a battery for applying electrical stimulation to the electrodes 203 and a square wave generation circuit are incorporated in the power supply unit 205A in an integrated manner. The operation of the power supply unit 205A is controlled by a control signal received directly from the external device 300 or a control signal received through a control unit 213 (omitted in the drawing) inside the capsule main body 201B.
In this way, the power source and the square wave generating circuit for applying the electrical stimulation are made of a different material from the capsule body 201B, and thus the structure of the capsule body 201B is simple. In addition, the battery 205 (omitted in this figure) inside the capsule main body 201B is not used for applying electrical stimulation, and therefore the battery 205 can be used for a long time.
Fig. 38 shows an eighth modification.
The balloon 202F in this balloon-type medical device C20 is provided with a through-hole 222 passing through the balloon-type medical device C20 from front to back. Therefore, the same function as the above-described space Ih is ensured by these through holes 222.
Fig. 39A to 39D show a ninth modification.
The structure of the inflation and deflation mechanism of this balloon-type medical device C21 is different from that of the balloon-type medical device C14 described above. In the capsule main body 201C of this capsule medical device C21, the various constituent elements of the above-described capsule main body 201 are provided in the housing 211B in an integrated manner. Further, a storage chamber 261, a guide hole 262a, a guide hole 262B, and a screw hole 263 are formed in the housing 211B, and a moving member 264 is interlocked into the screw hole 263. By these various constituent elements, a function corresponding to the expansion and contraction mechanism unit 216 described above is ensured.
As shown in fig. 39A to 39C, in the storage chamber 261 provided in the capsule main body 201C, the pressurized gas g is stored through a hole penetrating from the outside, and after the storage, the hole is blocked by a rubber cap 261 s. As described below, the pressurized gas g may be replaced with a blowing agent. In addition, the storage chamber 261 is connected to a screw hole 263 that enables the moving member 264 to perform a rotational motion via a guide hole 262a, and the screw hole 263 is also connected to the outside of the capsule-type medical device C21 via a screw hole 262 b. The rear edge of the threaded hole 263 is opened to the outside of the capsule-type medical device C21.
In addition, the rear edge side of the bag main body 201C is covered with the airbag 202, and the front edge side of the airbag 202 is fixed in the vicinity of the center of the bag main body 201B in an airtight manner by a band-like fixing member 220. Electrodes 203 are fixed to the rear edge side of the balloon 202, and these electrodes are electrically and mechanically connected to the balloon body 201C through flexible wires 204.
The moving member 264 includes, for example: a permanent magnet 264m in a bar shape magnetized to north and south poles in a direction orthogonal to a longitudinal direction thereof; and an elastic rubber 264g of an external screw thread shape covering the permanent magnet 264 m.
The following will be explained: the inside of the living body cavity of the examinee was observed and studied using the capsule type medical device C21 configured as described above.
First, the examinee mounts the external device 300 and a below-described rotating magnetic field generating device to his abdomen or elsewhere by means of a belt or the like. Then, the capsule type medical device C21 is introduced into the living body cavity by inserting the capsule type medical device C21 from the mouth. When the capsule type medical device C21 is introduced into a living body cavity, the balloon is contracted as shown in fig. 39A.
Before the capsule type medical device C21 is advanced into the duodenum and reaches a position to be selectively studied by various sensors inside the observation window 211d, a rotating magnetic field is applied by a not-shown rotating magnetic field generating device placed outside the living body. Thereby, the moving member 264 is rotated along the screw hole 263 and the moving member 264 is moved to the front of the housing.
When the moving member 264 is moved to the front of the housing, the storage chamber 261 is connected to the airbag 202 via the guide hole 262a and the screw hole 263 as shown in fig. 39B. Thereby, the pressurized gas g flows into the airbag 202 as indicated by the arrow, inflating the airbag 202. Instead of the pressurized gas g, a blowing agent may be used. In this case, it is preferable to coat the inside of the balloon 202 with a small amount of water to perform the reaction.
When the balloon 202 is thus inflated, the electrodes 203 on the balloon 202 are in contact with the inner wall of the digestive tract (luminal organ) near the position. In addition, by supplying a square wave current of several milliamperes to the electrode 203 in pulses of a certain period, the inner wall of the digestive tract in the area is contracted by electrical stimulation, and by converting the contraction force into a propulsive force, the device is propelled to the target position. Next, when the target position is reached, the current is stopped, the device is held at the position, and detection is completed by various sensors. Next, after a time sufficient for the various sensors to complete detection, current is again made to flow to the electrodes 203, and the device is advanced to the anus by the contractile force caused by the electrical stimulation.
Further, the rotating magnetic field is applied just before the anus, moving member 264 is moved to the front edge side, whereby the inside of balloon 202 is connected to the outside of capsule-type medical device C21 via screw hole 263 and guide hole 262 b. That is, the pressurized gas that inflates the airbag 202 is discharged to the outside, and the airbag 202 contracts, as shown in fig. 39C. Next, the capsule type medical device C21 is easily discharged from the living body through the anus.
Since the expansion and contraction mechanism unit has such a configuration, the expansion and contraction of the airbag 202 can be achieved more easily and more accurately.
Next, fig. 40A to 40C show a tenth modification.
The balloon 202H of this capsule type medical device C22 is composed of a material that is substantially not elastically expanded or contracted, unlike the balloon 202 described above. As a specific example of such a material, a Teflon (registered trademark) film composed of PFA (tetrafluoroethylene-perfluoro (alkoxy vinyl ether) copolymer), PTFE (polytetrafluoroethylene), or the like is suitable. In addition, the lead 204 is printed on the flexible printed circuit board 204F in an integrated manner, and the flexible printed circuit board 204F is pasted on the inner surface of the air bag 202H.
When this capsule-type medical device C22 is inserted through the mouth, the balloon 202H is wrapped around the capsule main body 201 and bound by a band 223 made of starch, starch paper (board), or the like, as shown in fig. 40A. When the device reaches the stomach in this state, the band 223 is dissolved, so that the balloon 202H can be inflated. Then, the balloon 202H is inflated, and the capsule-type medical device C22 is appropriately advanced while applying electrical stimulation to the inner wall of the luminal organ through the electrode 203.
Since the balloon 202H is substantially not elastically expanded or contracted, it is not expanded beyond a predetermined maximum outer diameter. Therefore, the length of the lead wire 204 is set according to the maximum expansion of the air bag 202H, and the lead wire 204 can be pasted inside the air bag 202H in a manner integrated with the flexible printed circuit board 204F. Thus, disconnection due to repeated use of the lead 204 can be substantially eliminated, and thus the device can withstand longer use.
Fig. 41A and 41B show an eleventh modification. In this balloon-type medical device C24, the balloon main body 201D and the balloon 202I are connected by a shape memory coil (inflation device) 216C.
In the capsule main body 201D, the expansion and contraction mechanism unit 216 is omitted from the above-described capsule main body 201. In addition, the material of the airbag 202I is the same as the airbag 202 described above, but is shaped so as to project further rearward from the rear edge side of the bag main body 201D when contracted. A predetermined volume of fluid (water, air, etc.) is sealed within the bladder 202I. In addition, a shape memory coil 216c made of a shape memory alloy extends from the rear edge of the bag main body 201D, and its tip is connected to the rear edge of the air bag 202I by a connecting piece 216D. The shape memory coil 216c has shape memory characteristics such that it extends to a longer shape when the ambient temperature is below body temperature and contracts to a coil shape when the ambient temperature reaches body temperature.
The examinee inserts the capsule-type medical device C24 into the living body cavity from the mouth in the state shown in fig. 41A. In the living body cavity, the ambient temperature of the capsule type medical device C24 becomes approximately the same as the body temperature, and therefore the shape memory coil 216C contracts. Thus, the balloon 202I is deformed and laterally expanded as shown in fig. 41B, so that the electrodes 203 on the balloon 202I are brought into contact with the inner wall of the luminal organ.
In this way, the balloon is inflated and deflated using the shape memory coil 216c, and therefore the inflation and deflation mechanism unit can be omitted from the balloon body, thereby making the structure thereof simpler.
In addition to setting the shape memory temperature of the shape memory coil 216c to be higher than the body temperature, the following structure is also possible: the airbag 202I can be inflated or deflated at an arbitrary position by providing a heater or the like that can be controlled by the control unit 213 (omitted in the figure).
Fig. 42A and 42B show a twelfth modification.
This capsule-type medical device C25 is a modification of the above-described capsule-type medical device C24. An elastic expansion unit 202J made of a flexible rubber (elastomer) having high elasticity is provided on the above-described bag main body 201D in place of the above-described air bag 202. The elastomer has wires 204 (omitted from the drawing) stored therein in a watertight state.
When this capsule type medical device C25 is inserted from the mouth, the elastic expansion unit 202J is folded so that the outer diameter is small and stored in a reduced diameter state in the capsule 224 made of starch, starch paper, or the like. When it reaches the stomach in this state, the balloon 224 is dissolved, causing the elastic expansion unit 202J to elastically expand into a wide diameter state. Thereafter, the capsule type medical device C25 is appropriately advanced while applying electrical stimulation to the inner wall of the luminal organ through the electrode 203. Since the elastic expansion element 202J has high elasticity, it is also easily deformed. Therefore, it can be elastically deformed when discharged from the anus, so that it can be easily discharged.
Since the apparatus is equipped with such an elastic expansion unit 202J, the expansion and contraction mechanism unit is omitted from the capsule main body, so that the structure thereof becomes simpler.
A fourth embodiment of the present invention will be explained below with reference to fig. 43A to 43C. In this embodiment, constituent elements common to those in the third embodiment described above are denoted by the same reference numerals, and detailed description thereof is omitted.
Fig. 43A shows the structure of the leading edge side of the endoscope apparatus (capsule type medical apparatus) of this embodiment. Fig. 43B and 43C show the structure in the vicinity of the insertion port of the capsule-type medical device of this embodiment. Further, fig. 44A and 44B show a state after the endoscopic device constituted by the capsule-type medical device is released within a luminal organ of the digestive tract (such as the small intestine).
As shown in fig. 43A to 43C, the endoscope apparatus (capsule type medical apparatus) S1 is provided with: a capsule type medical device C26; a hollow tube 206 that can be freely attached to or detached from the balloon-type medical device C26; and an endoscope 207 insertable into the tube 206. The balloon-type medical device C26 makes it possible to omit the expansion and contraction mechanism unit 216 from the balloon-type medical device C1 in the third embodiment described above.
The capsule-type medical device C26 is provided with, in an observation window at the tip end of the capsule main body 201E: a light emitting device unit 212b such as a white LED or the like; and a shooting element unit 212a constituted by an optical system such as an objective lens and a solid-state shooting element such as a CCD or CMOS imager, and further, on the side surface on the rear side thereof, a balloon 202K made of an elastic material such as silicone rubber or latex rubber, the entire periphery of which can be easily inflated, is mounted to the fixing unit 220 through a fixing ring or the like, and further, in order to supply a fluid to the inside of the balloon 202K (strictly speaking, a space between the balloon 202K and the balloon body 201E), an injection port 217a is provided on the rear edge. The injection port 217a is connected to the inside of the balloon 202K via a fluid passage 217. To supply the fluid to the balloon 202K, the tube 206 may be freely attached to or detached from the injection port 217 a.
The front edge of the tube 206 is a needle-shaped narrow diameter unit 206t that can be easily fitted to the injection port 217 a. In addition, on the closure side, not shown, there is a closure side opening hardware to which a fluid injection tool (e.g. a syringe) can be freely connected. Further, by supplying a fluid from the injection port 217a, the fluid is injected into the balloon 202K via the fluid passage 217 so that the balloon 202K can be inflated to at least the extent that it can be brought into close contact with the luminal organ in the small intestine I (about 20-30 mm).
The injection port 217a provided at the rear edge of the capsule main body 201 has an elastic valve structure like a valve on a soft tennis ball so that the balloon 202K is sealed even if the tube 206 is detached after the balloon 202K is swallowed. In addition, a battery 205 as a power source is provided in the bag main body 201E, and a pair of bipolar electrodes 203 are fixed on one side of the rear edge surface of the air bag 202K, the electrodes 203 and the battery 205 being electrically and mechanically connected by a flexible strip-shaped wire 204.
The endoscope 207 is provided with a channel 271 along the axial direction of the long and narrow insertion unit 270. On the other hand, the tube 206 has a length longer than that of the passage 271 and has an outer diameter that enables smooth insertion or extraction of the passage 271, and a fluid such as air or water may be supplied from the base end to the front edge of the tube 206.
As shown in fig. 43B, a rubber cap 217v exhibiting elasticity is attached to the injection port 217 a. The narrow channel 217l formed in advance in this rubber cap 217v is in a clogged state when the needle-shaped narrow diameter unit 206t on the front edge of the tube 206 does not pass through it. In this case, the rear edge of the passage 217l has a mark so that the insertion position can be known, and has a recessed portion 217u so that the needle-shaped narrow-diameter unit 206t can be easily inserted.
As shown in fig. 43C, when the needle-shaped narrow diameter unit 206t is inserted into the injection port 217a, the needle-shaped narrow diameter unit 206t passes through the passage 217 l. By injecting a fluid such as a liquid or a gas from the needle-shaped narrow diameter unit 206t in this state, the external balloon 202K including the fluid storage unit can be inflated as shown in fig. 44A and 44B. In the case of attaching the tube 206 to the inlet 217a of the capsule main body 201E, when the base end of the tube 206 is inserted from the distal end of the channel 271, the base end of the tube 206 protrudes from the base end of the channel 271 (omitted in the figure).
The capsule-type medical device C26 can be detachably fixed to the distal end of the endoscope 207 by applying a pulling force that does not drop the tube 206 to the base end of the extended tube 206, or by performing suction on the rear edge of the capsule-type medical device C26 via the channel 271, as shown in fig. 43A. When the capsule-type medical device C26 is fixed by suction, an absorbent 7a made of elastic rubber or the like may be added between the capsule-type medical device C26 and the distal end of the endoscope 207 in order to improve the absorption function.
To facilitate the release of the capsule-type medical device C26, a grasping tool 272F having a grasping function is inserted into the second channel 272 provided in the endoscope 207, and a grasping unit at the tip of the grasping tool 272F grasps the grasping protrusion 201t provided in the vicinity of the rear edge of the capsule-type medical device C26, and the balloon 202K can be inflated.
When this endoscope apparatus S1 is inserted from the mouth, the capsule-type medical apparatus C26 is set in a state of being fixed on the tip end of the endoscope 207 and the balloon 202K is in a contracted state (in a state where the balloon 202K is in sufficiently close contact with the outer periphery of the capsule main body 201E), as shown in fig. 43A, and the capsule-type medical apparatus C26 and the endoscope 207 are inserted into the living body cavity in an integrated manner. Further, the capsule type medical device C26 is brought to a position as an inspection target, for example, the small intestine I.
In this state, fluid is supplied to the inside of the balloon 202K via the tube 206, the balloon 202K, which has been sufficiently inflated around the entire periphery thereof, is brought into contact with the inner wall of the small intestine I, and then the tube 206 is removed and pulled out from the injection port 217a while the capsule-type medical device C26 is fixed substantially at the center of the inside of the luminal organ of the small intestine I. By removing the tube 206, the fixation between the capsule-type medical device C26 and the tube body 206 is released, the tube body 206 and the endoscope 207 are pulled out to the outside of the living body, and only the capsule-type medical device C26 remains in the small intestine I.
The resistance generated by the inflated balloon 202K and the inner wall of the small intestine I controls the rotation and inclination of the capsule-type medical device C26, and the position of the photographing element unit 212a located substantially at the center of the luminal organ is maintained even during the movement caused by peristalsis after the capsule-type medical device C26 is left in the small intestine.
Fig. 44A and 44B show the capsule type medical device C26 after release. Fig. 44A shows a state in which the axis of the capsule-type medical device C26 is held along the center of the lumen, which is a state in which the photographing element unit 212a performs photographing, and the field of view is the forward side of the lumen. In addition, fig. 44B shows the following state: the rear portion of the balloon-type medical device C26 shown in fig. 44A descends to the bottom side of the lumen, thereby tilting the axis of the balloon-type medical device C26 with respect to the center of the lumen. Even in this case, an image can be captured using the capture element unit 212a, and the field of view is the forward side of the lumen.
When the balloon 202K is inflated, the pair of electrodes 203 on the outer surface of the balloon 202K is in contact with the inner wall of the digestive organ (e.g., small intestine I). In this state, the peristaltic movement may be promoted or the local contraction of the digestive organ may be caused by the electric stimulation caused by intermittently flowing the current from the battery 205 to the electrode 203. Thus, by the initiated peristaltic or local contraction, the balloon-type medical device C26 may be advanced faster than under normal conditions. In addition, the wire inside the balloon 202K is flexible, and therefore the wire 204 inside the balloon 202K can be freely deformed, so that problems such as disconnection of the wire 204 can be prevented from occurring when the balloon is inflated and deflated.
The balloon 202K is carried to the large intestine by the active peristalsis of the small intestine I or the contraction action of the small intestine I caused by the electrical stimulation, while the visual field is the entire periphery, and thereafter the large intestine is also observed up to the anus. When the balloon 202K is difficult to pass to the outside of the anus, a needle for forming a hole in the balloon 202K may pierce the balloon from the outside of the anus.
The site at which the balloon 202K of the capsule type medical device C26 is inflated need not be the small intestine I, but may be the stomach or duodenum, and a conventional upper gastrointestinal endoscope is used at this time. In addition, a simple catheter endoscope (guide member) having a bending function may be used instead of the endoscope having the observation device.
In this endoscope apparatus S1, the structure can be made simple without making the capsule-type medical apparatus C26 larger, and the balloon 202K in the living body cavity can be inflated by a simple method. In addition, it is possible to leave only the capsule type medical device C26 in the living body cavity (inside the luminal organ) after the balloon is inflated to achieve good observation and study.
In the above-described third and fourth embodiments, the illustrated structure is a structure in which at least one pair of bipolar electrodes is mounted on the flexible expansion unit, but this is merely illustrative and not restrictive, since it is also possible to mount at least one electrode (in other words, only one electrode of the pair of electrodes) to the elastic expansion unit. In this case, the other electrode of the pair may be mounted directly to the capsule body, so that the spacing between the electrodes is variable.
A fifth embodiment of the present invention will be described with reference to fig. 45A and 45B. In this embodiment, the constituent elements common to those in the first or fourth embodiment described above are denoted by the same reference numerals, and detailed description thereof is omitted.
A balloon 202L, an electrode 203, and a flexible wire 204 similar to the balloon 202 described above are attached to a flexible endoscope (device main body) 207S of an endoscope device (capsule type medical device) S2 of the present invention.
As shown in fig. 45A, the flexible endoscope 207S has a hard member 275 provided on the distal end of a flexible member 276 and a connector unit 278 provided on the base end. In the hard member 275, an objective lens 275a, an illumination lens 275B, and a passage 275c are provided as shown in fig. 45B. In addition, the connector unit 278 is located outside the living body, and is detachably connected to a connector unit 318 of an external device 310 described below.
The balloon 202L is fixed to the rear side of the hard member 275 in the endoscope 207S. Reference numeral 220e in the figure denotes the endoscope 207S and the balloon 202L. At least one pair of bipolar electrodes 203 is mounted on the rear surface of the balloon 202L. These electrodes are connected to the connector unit 278 by flexible wires 204.
In addition, in order to inject a fluid such as air or water into the air bag 202L and discharge the fluid from the inside of the air bag 202L, an injection and discharge port 277 is formed in the flexible member 276 located inside the air bag 202L. The injection and discharge port 277 is connected to the connector unit 278 so that fluid from the external device 310 described below can be injected and discharged.
The external device 310 is provided with a power supply 311, a limiter 311L, a light source device 312, a fluid injection and discharge device (expansion device) 313, a video processor 314, a monitor 315, and a connector unit 318. If connector unit 278 is connected to connector unit 318, illumination light from light source device 312 may be delivered to illumination lens 275b, and an image from objective lens 275a may be delivered to video processor 314 and stored in memory or displayed on monitor 315. In addition, the power source 311 and the electrode 203 are mechanically and electrically connected by the lead 204, and thus a current for causing electrical stimulation can be led from the power source 311 to the electrode 203 via the lead 204. Further, the fluid injection and discharge device 313 is connected to the injection and discharge port, so that it is possible to achieve the injection of the fluid into the air bag 202L or the discharge of the fluid from the air bag 202L.
Fig. 45A shows the endoscope apparatus S2 in a state of being inserted into the large intestine R from the anus. When the endoscope apparatus S2 is inserted, the balloon 202L is in a contracted state (a state in which the balloon 202L is sufficiently in close contact with the outer surface of the flexible unit 276). Further, after the insertion, the balloon 202L is inflated by the action of the fluid injection and discharge device 313, and the power source 311 is operated to cause a square wave current to flow in pulses to the electrode 203, applying an electrical stimulus to the inner wall of the large intestine R, thereby advancing the endoscope apparatus S2. When the device has reached the target location, the electrical stimulation is stopped, or the balloon 202L is inflated after stopping the electrical stimulation to remain at the location, and then observation and investigation of the large intestine R is performed. At this time, a current of a set value or more is prevented from flowing to the electrode 203 by the limiter 311L.
Further, after the observation and study are finished, when the endoscopic device S2 is removed from the large intestine R, the balloon 202L is contracted as it was at the time of insertion, thereby making it easy to pass through the anus.
In this endoscopic apparatus S2, the structure of the flexible endoscope includes a balloon, electrodes, and flexible wires, whereby the function of applying stable electrical stimulation to contractible tissue can be added to the conventional flexible endoscope. In addition, since the power source for applying the electrical stimulation and the inflation device of the balloon are provided outside, the structure of the portion of the endoscope device inserted into the living body cavity can be simplified.
A sixth embodiment of the present invention will be explained below with reference to fig. 46A to 50C. In this embodiment, the constituent elements common to those in the above-described third, fourth and fifth embodiments are denoted by the same reference numerals, and detailed description thereof is omitted.
As shown in fig. 46A and 46B, the balloon unit 208 is attached to a balloon body (apparatus body) 201G of an endoscope apparatus (balloon-type medical apparatus) S3.
The capsule main body 201G is a general-purpose capsule endoscope which is structurally omitted from the capsule main body 201 in the above-described capsule type medical device C14 in the square wave generating circuit 213a and the expansion and contraction mechanism unit 216. The case of the capsule body 201G may be divided into a front case 211x and a rear case 211y, as shown in fig. 46B, and the button battery 205 may be mounted therein. A groove 211h is formed in the outer periphery of the housing (rear housing 211y in fig. 46B).
The balloon unit 208 is provided with a flexible tube 281, an attachment unit 282, a balloon (elastic expansion unit) 202M similar to the balloon 202 described above, at least one pair of electrodes 203, and a flexible wire 204.
The base end of the tube 281 is connected to an external device, not shown, and the attachment unit 282 is attached to the tip end of the tube 281 in an integrated manner. The attachment unit 282 may be detachably attached to the bag main body 201G in an integrated manner, and a band unit 282b made of an elastomer is provided thereon, the band unit 282b interlocking with the groove unit 211h of the bag main body 201G. The airbag 202M is fixed to the tube 281 at the rear side of the mounting unit 282. Reference numeral 220g in the drawing denotes a fixing unit that fixes the tube 281 and the balloon 202M. At least one pair of bipolar electrodes 203 is detachably mounted on the rear surface of the balloon 202M. These electrodes 203 are mounted with flexible wires 204 that pass through the inside of the tube 281 and are connected at their base ends to external devices. That is, the electrode 203 and an external device are mechanically and electrically connected by the flexible wire 204, and a current from the external device can flow to the electrode 203 via the flexible wire 204.
In addition, in the tube 281 located inside the balloon 202M, an injection and discharge port 281h for injecting a fluid into the balloon 202M and discharging the fluid from the balloon 202M is formed. The injection and exhaust port 281h is connected to an external device so that fluid can be injected into and exhausted from the external device.
Fig. 47A shows a state in which the endoscope apparatus S3 is inserted into the large intestine R from the anus P. When this endoscope apparatus S3 is inserted, the balloon 202M is in a contracted state (the balloon 202M is in a state of sufficiently close contact with the outer surface of the tube 281). After the insertion, the external device is operated, as shown in fig. 47B and 47C, the balloon 202M is inflated, and the power source 311 is operated, so that a square wave current flows to the electrode 203 in the form of a pulse, and an electric stimulus is applied to the inner wall of the large intestine R, thereby advancing the endoscope device S3. When the device has reached the target location, the electrical stimulation is stopped, or the balloon 202M is inflated after stopping the electrical stimulation to remain at the location, and then observation and investigation of the large intestine R is performed.
Further, after the observation and study are finished, when the endoscopic device S3 is removed from the large intestine R, the balloon 202M is contracted as it was at the time of insertion, thereby making it easy to pass through the anus.
As shown in fig. 48, if the endoscopic device S3 is used in combination with a flexible endoscope 207W, observation and study of the deepest region of the large intestine R (i.e., appendix a and ileocecal valve V) can be easily achieved. Specifically, the insertion of the endoscope into the large intestine R (which requires skill in the insertion operation) can be easily achieved by first inserting the endoscopic device S3 and then using the tube 281 as a guide wire of the flexible endoscope 207W.
Further, the flexible endoscope 207W is preferably a double-channel type as shown in fig. 48. If the endoscope is of a dual channel type, the tube 281 of the endoscope apparatus S3 may be passed through the first channel Ch1, and the forceps F or the like may be passed through the second channel Ch 2. That is, observation and study can be achieved by the endoscope S3, and treatment of a lesion (e.g., polyp) can be achieved by the forceps F at the same time.
The balloon unit 209 is attached to a balloon body (apparatus body) 201H of an endoscope apparatus (balloon-type medical apparatus) S4, as shown in fig. 49A and 49B.
The capsule main body 201H has observation windows 211d1 and 211d2 formed on the front and rear sides of the above-described capsule main body 201, and in vivo information acquisition means (omitted in the figure here) composed of the above-described photographing unit 212 and various sensors are provided in these observation windows 211d1 and 211d 2. The operation of the in-vivo information acquisition apparatus between the front side and the rear side is appropriately controlled by various control units 213 (omitted in the figure here). In addition, one groove unit 211H is formed on each of the front and rear sides of the capsule main body 201H.
The balloon unit 209 is provided with a balloon (elastic expansion unit) 202N similar to the balloon 202 described above, a mounting hoop unit 291, at least one pair of electrodes 203, a flexible wire 204, a tube 292, and a wire cover 293, as shown in fig. 49A, 49B, and 50A.
On the front edge and the rear edge of the airbag 202N, mounting collar units 291b composed of an elastic body and interlocked with the groove units 211H of the bag main body 201H, respectively, are provided in an integral manner, respectively. The airbag 202N is detachably attached to the bag body 201H in an integrated manner by these attachment hoop units 291 b. A flexible tube 292 is attached to the rear side of the balloon 202N. A connector 292c connected to an external device is formed on a base end of the tube 292. Here, a syringe (expansion device) 321 and a two-way valve (expansion device) 321v are shown as examples of the external device. By operating the syringe 321 and the two-way valve 321v, fluid can be injected into the balloon 202N and can be discharged from the balloon 202N.
Further, at least one pair of bipolar electrodes 203 is mounted on the front surface of the airbag 202N. These electrodes 203 are mounted with flexible wires 204 passing through flexible wire sleeves 293 mounted on the rear side of the balloon 202N and connected to base end connectors 293 c. The connector 293c is connected to a connector 322c provided on the power supply device 322 in one example of the external device. That is, if the connector 293c and the connector 322c are connected, the electrode 203 and the power supply device 322 are mechanically and electrically connected by the flexible wire 204, so that the current from the power supply device 322 can flow to the electrode 203 via the wire 204.
Fig. 50B shows a state when the endoscopic device S4 is inserted into the large intestine R from the anus P. When the endoscope apparatus S4 is inserted, the balloon 202N is in a contracted state (the balloon 202N is in a state of sufficiently close contact with the outer surface of the capsule main body 201H). Further, with the rear side of the capsule main body 201H facing forward (i.e., with the observation window 211d2 located on the front side), the device is inserted into the large intestine R. When the device is inserted in this manner, the electrode 203 is located on the rear side (anus P side) so that the device can be advanced toward the deep part of the large intestine R. After the device has been inserted, the endoscope device S4 is advanced by operating the syringe 321 and the two-way valve 321v to inflate the balloon 202N, and by operating the power supply device 322 to cause a square wave current to flow in pulses to the electrodes, thereby applying an electrical stimulus to the inner wall of the large intestine R. Further, when the target position is reached, the electrical stimulation is stopped, and the device is held at that position, thereby enabling observation and study of the large intestine R through the front observation window 211d1 and the rear observation window 211d 2.
Further, when the endoscopic device S4 is removed from the large intestine R after the observation and study are completed, the tube 292 and the wire sheath 293 are pulled out from the outside of the living body so that the capsule main body 201H faces the direction opposite to the direction in which it reaches the point. In this way, the electrode 203 is positioned on the anterior side (the side toward the deep portion of the large intestine R), so that the device can be advanced toward the anus P.
When the bag main body 201H approaches the anus P, the air bag 202N is contracted as it is at the time of insertion, so that the device can be easily taken out from the anus P.
These endoscope apparatuses S3 and S4 are capsule type medical devices having a structure with a balloon attached to a capsule main body, electrodes, and flexible wires, whereby a function of applying stable electrical stimulation to contractible tissues can be added to a conventional capsule type endoscope. In addition, since the power source for applying the electrical stimulation and the inflation device of the balloon are provided outside, the structure of the portion of the endoscope device inserted into the living body cavity can be simplified.
In the above-described fifth and sixth embodiments, the structure is such that one or more pairs of electrodes are mounted on the balloon, but this is merely illustrative and not restrictive, since at least one electrode (i.e., only one of the pair of electrodes) may be mounted on the balloon. In this case, the other of the paired electrodes is mounted on the surface of the subject's body, thereby providing a monopolar electrode structure in which current flows from an external device to both electrodes.
The capsule-type medical device of the present invention may further include a thread fixing device for fixing the flexible thread in the groove and dissolving the thread in the living body.
Since the flexible wire is fixed within the groove by this type of wire fixing device, the flexible wire and the electrode do not become obstacles when introducing the capsule-type medical device into the living body (for example, when swallowing the device), so that it can be introduced into the living body more easily. Furthermore, after introduction of the device, the wire fixation device is dissolved, for example by gastric acid, whereby the fixation of the flexible wire is released in vivo, so that the spacing between the electrodes may be varied.
In the capsule-type medical device according to the present invention, a spring for urging the housing unit to the outside may be provided between the housing unit and the case.
If the spring is used in this manner, the housing unit can be moved to the outside by a predetermined driving force (energizing force) so that the interval between the electrodes can be varied, thereby precisely offsetting the difference in the diameter of the luminal organ in the living body.
In the capsule-type medical device of the present invention, a water-absorbent gel that swells when absorbing water may be inserted between the housing unit and the case.
If the water-absorbent gel is used in this manner, the housing unit can be moved to the outside upon water absorption after the device has been introduced into a living body, and therefore, the distance between the electrodes can be accurately changed with a simple structure.
In the capsule type medical device of the present invention, the electrode may be a hemispherical electrode forming a hemisphere protruding from an outer surface of the housing unit.
If the electrode has such a hemispherical shape, it is possible to make contact with body tissue easy, and since there is no corner, it is possible to control the advancement of the capsule-type medical device to suffer from obstruction.
In the capsule type medical device of the present invention, the electrode may be a cylindrical electrode forming a cylinder protruding from an outer surface of the housing unit.
If the electrode has such a cylindrical shape, the area in contact with the body tissue can be expanded, and thus, for example, the electrical stimulation can be accurately applied even to the body tissue such as a mucous membrane.
In the capsule-type medical device of the present invention, the electrode may be an embedded electrode embedded in the housing unit so as to have substantially the same surface as an outer surface of the housing unit.
If the electrodes are embedded in this manner, the device can be made to continue smoothly without the electrodes protruding from the outer surface of the housing unit, and therefore, the trouble of clogging of the advancement of the capsule-type medical device can be substantially eliminated.
In the capsule type medical device of the present invention, the electrode may be detachable from the elastic expansion unit.
In the capsule-type medical device of the present invention, the inflation unit may be a balloon that is inflated when a fluid is injected thereinto.
In the capsule type medical device of the present invention, the expansion unit may be a flexible rubber that can be contracted by folding.
In the capsule type medical device of the present invention, the electrode may be a conductive rubber.
In the capsule-type medical device of the present invention, the device body may be a capsule endoscope.
In the capsule-type medical device of the present invention, the device body may be a flexible endoscope.
In the capsule-type medical device of the present invention, the elastic expansion unit may have the following shape: a space may be formed through the unit from front to back to the body tissue.
In the capsule type medical device of the present invention, the above-mentioned inflation device may be a flexible tube connected to a fluid injection and evacuation device outside the living body.
In the capsule-type medical device of the present invention, the tube may be detached after the balloon is inflated.
In the capsule type medical device of the present invention, the inflation device may be a fluid release mechanism including: which discharges a pressurized gas or a foaming agent into the airbag inside the device body by an operation from the outside of the living body.
In the capsule type medical device of the present invention, the outer diameter of the elastic expansion unit may be set to about 15mm when contracted and about 40mm when expanded to the maximum.
In the capsule type medical device of the present invention, the electrodes need not be paired.
The preferred embodiments of the present invention have been described above, but these embodiments are merely illustrative and not restrictive. Additions, omissions, changes, and other changes to the embodiments can be made without departing from the spirit of the invention. The invention is defined by the scope of the appended claims rather than by the foregoing description. In addition, the present invention covers an apparatus in which the above-described various embodiments and modifications thereof are appropriately combined.
INDUSTRIAL APPLICABILITY
A capsule medical device of the present invention is a capsule medical device that is introduced into a living body and detects in-vivo information, the device being provided with: a bladder-shaped housing; an in-vivo information acquisition device provided in the housing, which acquires in-vivo information; a communication device that wirelessly transmits the in-vivo information acquired by the in-vivo information acquisition device to the outside of the living body; at least one pair of first electrodes disposed at one edge of the housing and applying electrical stimulation to body tissue within a living body; a first current control device that controls a current flowing to the first electrode; and an inter-electrode distance changing device that changes a distance between the first electrodes. With the capsule type medical device of the present invention, the distance between electrodes in a living body can be greatly changed, and therefore, the electrodes can be brought into accurate contact with body tissues even in an organ having a large lumen organ. Therefore, the capsule type medical device can be advanced in a stable manner in the living body.
The priority of the present patent application claiming Japanese patent application No. 2004-.
Claims (8)
1. A capsule type medical device to be introduced into a living body to collect in-vivo information, the capsule type medical device comprising:
a capsule-shaped housing;
in-vivo information acquisition means for acquiring the in-vivo information;
communication means for wirelessly transmitting the in-vivo information acquired by the in-vivo information acquisition means to the outside of the living body;
at least one pair of first electrodes disposed near one end along an axis of the housing;
a first current control device for supplying a current to the first electrode;
first inter-electrode distance changing means for changing a distance between the first electrodes;
a power supply for supplying power to the first electrode; and
a lead, at least a portion of which is flexible, for electrically and mechanically connecting the power source and the electrode; wherein,
said first inter-electrode distance changing means comprises an elastic expansion unit mounted at least partially on said housing,
the first electrode is disposed on the elastic expansion unit,
the elastic expansion unit is allowed to elastically deform under the condition that the elastic expansion unit is expanded, and the first electrode is made of an extensible material.
2. The capsule type medical device according to claim 1,
the maximum distance between the first electrodes that can be changed by the first inter-electrode distance changing means is set to be at least twice the outer diameter of the housing.
3. The capsule medical device according to claim 1, further comprising:
at least one pair of second electrodes provided in the vicinity of the other end along the axis of the housing and located at positions not coinciding with the in-vivo information acquisition device, for providing electrical stimulation to body tissue in the living body;
a second current control means for supplying a current to the second electrode; and
second inter-electrode distance changing means for changing a distance between the second electrodes,
wherein the second electrode is made of an extensible material.
4. The capsule type medical device according to claim 1, further comprising an expansion means for expanding the elastic expansion unit, wherein,
the expansion device is provided separately from the housing and is removably mounted to the housing.
5. The capsule type medical device according to claim 1,
the elastic expansion unit is detachably mounted on the housing.
6. The capsule type medical device according to claim 1,
the elastic expansion unit is provided with a hard member that is harder than the other portion of the elastic expansion unit, and the first electrode is provided on the hard member.
7. The capsule type medical device according to claim 1,
generating an electrical stimulation signal to be transmitted to the electrode by modulating a 100Hz or lower pulse signal with a 1000Hz or higher pulse signal.
8. The capsule type medical device according to claim 1,
the electrodes provide electrical stimulation to body tissue in the living subject.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP261015/2004 | 2004-09-08 | ||
| JP2004261015A JP4593211B2 (en) | 2004-09-08 | 2004-09-08 | Capsule medical device |
| JP2004296178A JP4642424B2 (en) | 2004-10-08 | 2004-10-08 | In-body medical device |
| JP296178/2004 | 2004-10-08 | ||
| PCT/JP2005/016999 WO2006028281A1 (en) | 2004-09-08 | 2005-09-08 | Capsule type medical device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101048100A CN101048100A (en) | 2007-10-03 |
| CN100594837C true CN100594837C (en) | 2010-03-24 |
Family
ID=36155217
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200580036822A Expired - Fee Related CN100594837C (en) | 2004-09-08 | 2005-09-08 | Capsule type medical device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4593211B2 (en) |
| CN (1) | CN100594837C (en) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4805056B2 (en) | 2006-08-02 | 2011-11-02 | オリンパス株式会社 | In-subject introduction apparatus, extracorporeal reception apparatus, and in-subject information collection system |
| CA2932956C (en) | 2006-08-03 | 2020-04-14 | Christoph Scharf | Method and device for determining and presenting surface charge and dipole densities on cardiac walls |
| WO2008035760A1 (en) * | 2006-09-22 | 2008-03-27 | Olympus Medical Systems Corp. | Capsule type endoscope, and gaster observation method |
| WO2009090547A2 (en) | 2008-01-17 | 2009-07-23 | Christoph Scharf | A device and method for the geometric determination of electrical dipole densities on the cardiac wall |
| JP2009247690A (en) * | 2008-04-08 | 2009-10-29 | Nippon Telegr & Teleph Corp <Ntt> | Defecation desire informer and detector |
| JP2009270901A (en) * | 2008-05-07 | 2009-11-19 | Yoichi Kaneko | Method for measuring highly accurately three-dimensional position of passive rfid tag |
| UA109424C2 (en) * | 2009-12-02 | 2015-08-25 | PHARMACEUTICAL PRODUCT, PHARMACEUTICAL TABLE WITH ELECTRONIC MARKER AND METHOD OF MANUFACTURING PHARMACEUTICAL TABLETS | |
| EP2683293B1 (en) | 2011-03-10 | 2019-07-17 | Acutus Medical, Inc. | Device for the geometric determination of electrical dipole densities on the cardiac wall |
| CN102274580A (en) * | 2011-05-16 | 2011-12-14 | 梁志伟 | Electrical stimulated therapeutic instrument and application method thereof |
| US10004459B2 (en) | 2012-08-31 | 2018-06-26 | Acutus Medical, Inc. | Catheter system and methods of medical uses of same, including diagnostic and treatment uses for the heart |
| WO2014124231A1 (en) * | 2013-02-08 | 2014-08-14 | Acutus Medical, Inc. | Expandable catheter assembly with flexible printed circuit board |
| CN103222844B (en) * | 2013-04-25 | 2016-01-27 | 中国人民解放军成都军区总医院 | Controllable capsule endoscopy |
| EP3043701B1 (en) | 2013-09-13 | 2024-02-21 | Acutus Medical, Inc. | Devices and methods for determination of electrical dipole densities on a cardiac surface |
| EP3122246B1 (en) | 2014-03-25 | 2022-05-04 | Acutus Medical, Inc. | Cardiac analysis user interface system and method |
| CN115299988A (en) | 2015-05-12 | 2022-11-08 | 阿库图森医疗有限公司 | Ultrasonic sequencing system and method |
| CN107847745B (en) | 2015-05-13 | 2022-06-24 | 阿库图森医疗有限公司 | Positioning system and method for collecting and analyzing cardiac information |
| JP6526519B2 (en) * | 2015-08-18 | 2019-06-05 | 英敏 太田 | Gastrointestinal tract observation device |
| CN110191667B (en) * | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | Device and method for enhancing the visual effects of the small intestine |
| CN109009247B (en) * | 2018-10-19 | 2023-09-08 | 安翰科技(武汉)股份有限公司 | Sampling capsule and sampling capsule system |
| CN117224171A (en) * | 2018-10-19 | 2023-12-15 | 安翰科技(武汉)股份有限公司 | Sampling capsule, sampling capsule system and control method |
| CN116392130B (en) * | 2023-06-07 | 2023-09-08 | 广州思德医疗科技有限公司 | Esophageal manometry device |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2352636B (en) * | 1999-08-03 | 2003-05-14 | Univ College London Hospitals | Improved passage-travelling device |
| US6866626B2 (en) * | 2001-11-09 | 2005-03-15 | Ethicon-Endo Surgery, Inc. | Self-propelled, intraluminal device with working channel and method of use |
| US20030093031A1 (en) * | 2001-11-09 | 2003-05-15 | Long Gary L. | Self-propelled, intraluminal device with medical agent applicator and method of use |
| JP4094543B2 (en) * | 2003-12-26 | 2008-06-04 | オリンパス株式会社 | Capsule type medical device system |
| ITPI20040008A1 (en) * | 2004-02-17 | 2004-05-17 | Dino Accoto | ROBOTIC CAPSULE FOR INTRA-BODY BIOMEDICAL APPLICATIONS |
| CN101217908B (en) * | 2005-07-08 | 2012-10-24 | 奥林巴斯医疗株式会社 | Apparatus for placing capsule type medical device, apparatus for placing capsule endoscope in the body |
-
2004
- 2004-09-08 JP JP2004261015A patent/JP4593211B2/en not_active Expired - Fee Related
-
2005
- 2005-09-08 CN CN200580036822A patent/CN100594837C/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006075269A (en) | 2006-03-23 |
| JP4593211B2 (en) | 2010-12-08 |
| CN101048100A (en) | 2007-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100594837C (en) | Capsule type medical device | |
| KR101048916B1 (en) | Capsule Type Medical Device | |
| US10064544B2 (en) | Endoscopic capsule and endoscopic system | |
| JP4578740B2 (en) | Capsule medical device | |
| EP1399201B1 (en) | Device for in-vivo procedures | |
| JP4443927B2 (en) | Self-propelled intraluminal device having electrode shape and method of use thereof | |
| US8430809B2 (en) | Capsule for use in small intestine | |
| JP4298266B2 (en) | Self-propelled intraluminal device with drug applicator | |
| JP4231657B2 (en) | Capsule medical device | |
| JP3490933B2 (en) | Swallowable endoscope device | |
| US8419614B2 (en) | Capsule endoscope | |
| US20080065169A1 (en) | Endoscopic Instrument for Engaging a Device | |
| WO2007097393A1 (en) | Capsule endoscope system | |
| WO2002087657A2 (en) | Gastric device and suction assisted method for implanting a device on a stomach wall | |
| JP2003299613A (en) | Self-propelled intraluminal device with working channel and method of use | |
| JP2005508710A (en) | Self-propelled intraluminal device with cylindrical hollow head and method of use thereof | |
| WO2007078003A1 (en) | Trans-natural opening based or transcutaneous medical system | |
| US7833176B2 (en) | Pressure-propelled system for body lumen | |
| JP4695678B2 (en) | Capsule medical device | |
| KR20140116869A (en) | Method of surgical treatment of intestinal obstructions in narrow and large intestine and device for its implementation | |
| US7727169B1 (en) | Device for in vivo sensing | |
| JP4642424B2 (en) | In-body medical device | |
| JP2004305593A (en) | Insertion attachment for endoscope | |
| JP2012516196A (en) | Obesity treatment | |
| KR20090102308A (en) | Device, system and method for acquiring information in living body |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20100324 Termination date: 20170908 |