具体实施方式
实施例1
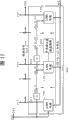
下面参照附图描述用于根据本发明实施例1的前端处理器。图3为示出根据本实施例用于数据接收器的前端处理器100的整体结构的方框图。形成用于数据接收器的前端处理器,以包含非线性失真均衡器101、准同步检测器108以及载波恢复电路。在下面所示的每个方框图中,粗实线表示复数信号的流向(向量信息),以及比粗实线更细的实线表示标量信息的流向。
图3的非线性失真均衡器101具有用于非线性失真均衡的复数信号转换器102、根升余弦滤波器103、误差估计器(ERR EST)104以及用于非线性失真均衡的系数估计器105。用于非线性失真均衡的复数信号转换器102在图中缩写为“COMP SIG CONV1”。根升余弦滤波器103在图中缩写为“RR COS FIL”。系数估计器105在图中缩写为“COEF EST 1”。误差估计器104由限幅器106和复数减法器107所形成。
提供在用于数据接收器的前端处理器的第一级中的准同步检测器108具有正交检测器109以及参考载波发生器110。载波恢复电路111位于准同步检测器108和非线性失真均衡器101之间,并且具有相位误差检测器(PHASE ERR DET)112、低通滤波器(LPAS FIL)113、数控振荡器114以及复数乘法器115。
准同步检测器108检测由未示出的天线所接收的调制信号。因此,准同步检测器108的参考载波发生器110振荡产生调谐频率的正弦波。正交检测器109通过把正弦波的相位延迟90度而产生余弦波,并且通过把上述调制信号分别乘以该正弦波、上述调制信号和余弦信号,而检测I轴和Q轴数据。
当在采样次数n的所检测信号相位误差角被表示为P(n)时,载波恢复电路111消除所检测输出的相位误差e-jP(n),并且把建立相位同步的信号x(n)输出到非线性失真均衡器101。载波恢复电路111的相位误差检测器112计算根升余弦滤波器103的输出v(n)与最接近的映射点之间的相位误差。低通滤波器113平均该相位误差。数控振荡器114产生正弦波ejP(n),用于通过使用由低通滤波器113获得的平均消除e-jP(n)。复数乘法器115执行正交检测器109的所检测输出与所检测输出与数控振荡器114的正弦波ejP(n)之间的复数乘法,从而输出信号x(n)。
下面描述非线性失真均衡器101的操作。用于非线性失真均衡的复数信号转换器102使用用于第三阶失真均衡的系数a3(n),该系数在用于非线性失真均衡的系数估计器105中产生,从而消除包含在信号x(n)中的第三阶失真。然后,根升余弦滤波器103仅仅允许在奈奎斯特带宽中的信号v(n)通过。误差估计器104计算信号x(n)与最接近的映射点d(n)之间的误差,并且把该映射点输出到未示出的误差纠正部分,作为一个解调信号。在此,在该误差纠正部分执行软判定解码(soft decision decoding)时,该非线性失真均衡器101把被输入到误差估计器104的信号v(n)输出到该误差纠正部分,作为一个解调信号。用于补偿非线性失真的系数估计器105使用该误差信号e(n)以及信号x(n),从而通过LMS(最小均方)算法更新用于第三阶失真均衡的系数a3(n)。
在图4中示出用于非线性失真均衡的复数信号转换器102的具体结构图。另外,在图5中示出用于非线性失真均衡的系数估计器105。如图4中所示,用于非线性失真均衡的复数信号转换器102具有一个复数立方计算器(COMP 3rd POW CIR)121、复数乘法器127以及复数加法器128。复数立方计算器121由乘法器122、123、125和126以及加法器124所形成。另外,如图5中所示,用于补偿非线性失真的系数估计器105具有延迟元件(DELAY CIR)延迟元件129、复数立方计算器(COMP 3rd POW CIR)121以及LMS电路130。LMS电路130由减法器131、复数加法器132、步长参数控制器133、乘法器134和135、加法器136和137以及延迟元件138和139所形成。
在下文中描述用于非线性失真均衡的复数信号转换器102的操作。当建立相位同步的信号x(n)被输入到复数立方计算器121时,用于非线性失真均衡的复数信号转换器102通过使用乘法器122、123对I、Q轴分量(实部、虚部)求平方,并且通过使用加法器124执行加法,从而产生|x2(n)|。另一方面,x(n)的I、Q轴分量被分别输入到乘法器125、126,用于非线性失真均衡的复数信号转换器102把x(n)乘以|x2(n)|,从而输出|x2(n)|x(n)。在此,|x2(n)|x(n)被定义为立方值x3(n)。复数乘法器127执行用于第三阶失真均衡的在用于线性失真均衡的系数估计器105中产生的系数a3(n)与立方值x3(n)的复数乘法。复数加法器128执行复数乘法器127的输出与所输入信号x(n)的复数加法,从而输出通过从信号x(n)消除第三阶失真而获得的信号y(n)。该信号y(n)在下面的方程中表示。在此,当用于第三阶失真均衡的系数的初值表示a3(0),a3(0)=0时,
y(n)=x(n)+a3(n)x3(n)…方程(1-1)
下面,描述用于非线性失真均衡的系数估计器105的操作。当建立相位同步的信号x(n)被输入时,延迟元件129把信号x(n)延迟M个符号。然后,复数立方计算器121把信号x(n)转换为|x2(n-M)|x(n-M),并且输出转换结果作为立方值x3(n-M)。在此,图3的根升余弦滤波器103的延迟量为M个符号,而误差估计器104的延迟量被设置为0。延迟元件129执行对M个符号的延迟调节,直到从信号y(n)计算误差信号e(n)为止。
减法器130通过把在图5的LMS电路130的Q轴信号的符号反转而产生复数共轭[x3(n-M)]*。在此“*”为表示共轭复数的符号。然后,复数加法器132执行复数共轭[x3(n-M)]*与误差信号e(n)之间的复数乘法。乘法器134和135把从步长参数控制器133输出的常数u乘以从复数加法器132输出的I和Q轴信号。加法器136和137把I和Q轴的乘法结果与来自延迟元件138和139的输出相加,从而把相加的结果输出到图4中的用于非线性失真均衡的复数信号转换器102,作为用于第三阶失真均衡的系数a3(n)。在此,图5的延迟元件分别把I轴的系数Re[a3(n)]和Q轴的系数Im[a3(n)]延迟一个符号。
下面,描述用于非线性失真均衡的系数估计器105的系数更新算法。参照图3,误差信号e(n)在下面的方程中表示。
e(n)=d(n)-v(n)…方程(1-2)
在此,信号v(n)是通过限制信号y(n)的频带而获得的信号,并且当信号v(n)假设为基本上等于y(n)时,形成如下方程。
e(n)=d(n)-y(n)…方程(1-3)
下面的方程从方程(1-3)和方程(1-1)获得。
e(n)=d(n)-[x(n)+a3(n)x3(n)]…方程(1-4)
当系数a3的估计函数被表示为J(a3)时,估计函数J(a3)被作为误差信号e(n)的幅度平方而给出,因此形成如下方程:
J(a3)=|e(n)|2…方程(1-5)
对于使估计函数J(a3)为最小的算法,也就是说,LMS算法,在许多情况中,使用如下方程来根据使用最陡梯度方法的梯度算法而更新该系数。
a3(n+1)=a3(n)-α·dJ(a3)/da3(n)…方程(1-6)
在此,方程(1-4)被代入方程(1-5),并且执行偏微分,从而获得如下方程:
dJ(a3)/da3(n)=2{e(n)·de(n)/da3(n)}=-2e(n)[x3(n)]* …方程(1-7)
当假设u=2α,并且把方程(1-7)代入方程(1-6),获得如下方程。
a3(n+1)=a3(n)+ue(n)[x3(n)]* …方程(1-8)
另一方面,参照图5在如下方程中表示a3(n):
a3(n)=a3(n-1)+ue(n-M)[|x2(n-M)|x(n-M)]* …方程(1-9)
从假设通过把x(n)延迟M个符号而获得的信号v(n)产生误差信号e(n)。在方程(1-9)中假设:
[|x2(n-M)|x(n-M)]*=[x3(n-M)]*
在方程(1-9)中,与误差信号e(n)和信号x(n)相比,系数a3(n)被延迟一个符号。系数更新的收敛速度在LMS相对较慢,但是,一个符号的延迟在实践中不造成任何障碍。
用于第三阶失真均衡的系数a3(n)的更新情况在图6中示出。初始条件是a3(n)=0。最接近于接收点的映射点d(n)以及该接收点x(n-M)是误差信号e(n-M)。在此,接收点x(n-M)被通过在用于非线性失真均衡的复数信号转换器102之后的根升余弦滤波器103而限制频带,并且被转换为v(n-M)。因此它被设置为[x3(n-M)]*=[|x2(n-M)|x(n-M)]*,[x3(n-M)]*与接收点x(n-M)相对于I轴对称,并且具有|x2(n-M)|倍大的符号。
e(n-M)[x3(n-M)]*的相位变为e(n-M)的相位与[x3(n-M)]*的相位之和。e(n-M)[x3(n-M)]*的幅度变为e(n-M)的幅度与[x3(n-M)]*的幅度之间的乘积。因此,如图6中所示获得大约指向x(n-M)的相位方向的矢量,并且在由于第三阶失真而导致幅度减小的方向上更新用于第三阶失真均衡的系数a3(n)。因此在方程(1-9)中假设[x3(n-M)]*=[|x2(n-M)|x(n-M)]*。
在此,用于非线性失真均衡的复数信号转换器102的输出y(n)通过根升余弦滤波器103。通过考虑到这种情况,在负数信号中的非线性失真可以获得较高精度的补偿。
在图3中示出根升余弦滤波器103的结构。根升余弦滤波器103具有延迟元件141、142和143以及复数复法器144、145和146。如图7中所示,在抽头的数目为(2M+1)的情况下,该滤波器总共由2M个延迟元件和(2M+1)个复数乘法器所形成,并且到达中心抽头的延迟量变为M个符号。
在考虑到该输出通过根升余弦滤波器103的情况下,在图8中示出用于非线性失真均衡的系数估计器151的结构。用于非线性失真均衡的系数估计器151通过除去延迟元件129并且在用于非线性失真均衡的图5中的系数估计器105内的复数立方计算器121的后级提供根升余弦滤波器103而获得。在该后级的LMS电路130与图5中的相同。
现在描述用于非线性失真均衡的系数估计器151的操作。当建立相位同步的信号x(n)被输入时,复数立方计算器121把信号x(n)转换为|x2(n-M)|x(n-M),从而输出转换结果作为立方值x3(n)。根升余弦滤波器103执行|x2(n)|x(n)的频带限制,从而输出∑CkFIL|x2(n-k)|x(n-k)。在此,CkFIL是根升余弦滤波器103的每个系数。由于根升余弦滤波器103的延迟量为M个符号,因此图5的延迟元件129变得不需要。LMS电路130通过使用根升余弦滤波器103的输出信号和误差信号e(n)而执行用于第三阶失真均衡的系数a3(n)的更新,并且输出到用于非线性失真均衡的复数信号转换器102。这种情况下,在如下方程中表示用于非线性失真均衡的系数a3(n):
a3(n+1)=a3(n)+ue(n)[∑CkFIL x3(n-k)]* …方程(1-10)
在上述结构中,能够以较高的精度执行在复数信号中的非线性失真的补偿。
另外,图5的用于非线性失真均衡的系数估计器105和图8的用于非线性失真均衡的系数估计器151可以在建立相位同步之后开始系数更新。这种情况下,在图3的载波恢复电路111中的低通滤波器113的滤波器输出被监控,并且在该输出稳定的情况下,当假设已经建立相位同步时,该锁定信号被设置在“H”。
在图5的用于非线性失真均衡的系数估计器105以及图8的用于非线性失真均衡的系数估计器151中,在锁定信号(LOCK SIG)为“L”的情况下,在LMS电路130中的步长参数控制器133把步长参数设置在u=0。在这种情况中,a3(n)=0。然后,用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。
在锁定信号为“H”的情况下,步长参数控制器133用特定的数值代替步长参数u,从而开始系数更新。根据上述操作,非线性失真均衡器可以补偿复数信号中的非线性失真,而对载波恢复电路111的操作没有负面影响。
另外,图5的用于非线性失真均衡的系数估计器105和图8的用于非线性失真均衡的系数估计器151可以仅仅在高C/N时执行系数更新。这种情况中,C/N估计器(C/N EST)116被提供在图3的非线性失真均衡器101中。C/N估计器116使用误差信号e(n),从而对于每个C/N与最接近的映射点之间的距离计算和平均C/N,并且把其结果输出到图5的用于非线性失真均衡的系数估计器105和图8的用于非线性失真均衡的系数估计器151。
在图5的用于非线性失真均衡的系数估计器105和图8的用于非线性失真均衡的系数估计器151中,在由CNR(载波信噪比)信号所示的C/N(载波信噪比)小于设置的阈值的情况下,在LMS电路130中的步长参数控制器133把步长参数设置为u=0。这种情况中,a3(n)=0,并且用于非线性失真均衡的复数信号转换器102的输出为y(n)=x(n)。在由CNR信号所示的C/N为设置的阈值或更大的情况下,步长参数控制器133用预定的数值代替步长参数u,从而执行系数更新。因此,可以补偿在复数信号中的非线性失真,而没有在低C/N的时候造成负面影响。
在此,在本实施例中,仅仅消除作为方程(1-1)中所示的非线性失真的主要的第三阶失真。但是,作为第二阶或更高阶的任意高阶非线性失真,可以通过如下假设而补偿失真:
y(n)=x(n)+∑am(n)xm(n)(m>1) …方程(1-11).
用于各阶次的在这种情况中的系数更新方程如下:
am(n+1)=am(n)+ue(n)[xm(n)]*(m>1) …方程(1-12)
其中形成xm(n)=|xm-1(n)|x(n)。
在图9中示出补偿至少第二阶失真并且不多于第K阶失真的高阶非线性失真的用于非线性失真均衡的复数信号转换器161的结构。另外,在图10中示出用于非线性失真均衡的系数估计器162。图9的用于非线性失真均衡的复数信号转换器161具有一个复数第K次幂计算器163至复数平方计算器164、复数乘法器165至166以及复数加法器167。另外,用于图10的非线性失真均衡的系数估计器162具有与阶数相同数目的多个延迟元件129、一个复数第K次幂计算器163至复数平方计算器164以及与阶数相同数目的多个LMS电路130。
现在描述这种结构的用于非线性失真均衡的复数信号转换器161的操作。当建立相位同步的信号x(n)被输入到用于非线性失真均衡的复数信号转换器161中时,复数第K次幂计算器163产生|xK-1(n)|x(n)作为第K次幂数值xK(n)。另外,复数平方计算器164产生|x(n)|x(n)作为平方值x2(n)。按照与图4中所示的复数立方计算器121相同的方式,复数第K次幂计算器163至复数平方计算器164由乘法器和加法器所形成。
复数乘法器165执行用于第K阶失真均衡的在用于非线性失真均衡的系数估计器162中产生的系数aK(n)与第K次幂数值xk(n)之间的复数乘法。复数乘法器166执行用于第二阶失真均衡的a2(n)与平方值x2(n)之间的复数乘法。复数加法器167执行ak(n)xk(n)、a2(n)x2(n)和x(n)之间的复数加法,从而输出通过从信号x(n)中消除第K阶失真和第二阶失真而获得的信号y(n)。按照类似的方式,对于其它阶次,复数第m次幂电路产生|xm-1(n)|x(n)作为xm(n)。然后该复数乘法器执行用于第m阶失真均衡的在用于非线性失真均衡的系数估计器162中产生系数am(n)与升高到第m次幂的数值xm(n)之间的复数乘法。另外,复数加法器167执行该乘法结果与信号x(n)之间的复数加法,从而从信号中消除x(n)第m阶失真。
当建立相位同步的信号x(n)被输入到用于非线性失真均衡的系数估计器162时,每一阶的延迟元件129把该信号x(n)延迟M个符号。然后,复数第K次幂计算器163把该信号x(n)转换为|xK-1(n-M)|x(n-M),并且输出转换结果,作为升高到K次幂的数值xK(n-M)。复数平方计算器164把该信号x(n)转换为|x(n-M)|x(n-M),并且把转换结果输出为平均值x2(n-M)。每一阶的LMS电路130通过使用上述转换结果和误差信号e(n)执行系数更新,从而把用于第K阶失真均衡的系数aK(n)以及用于第二阶失真均衡的系数a2(n)输出到用于非线性失真均衡的复数信号转换器161。
按照相同的方式,在其它阶次中,延迟元件129把该信号x(n)延迟M个符号。然后,复数第m次幂电路把该信号x(n)转换为|xm-1(n)|x(n),并且输出转换结果,作为升高到m次幂的数值xm(n)。然后,LMS电路130通过使用该转换结果和误差信号e(n)执行系数更新,从而把用于第m阶失真均衡的系数am(n)输出到用于非线性失真均衡的复数信号转换器161。根据上述操作,可以补偿第二阶失真或者更高阶失真的任意高阶非线性失真。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过根升余弦滤波器103。通过考虑到这种情况,在用较高精度补偿复数信号中的非线性失真的情况中,可以按照与上文相同的方式补偿第二阶失真或者更高阶的任意高阶非线性失真。这种情况中,取消每一阶的延迟元件129,并且在复数第K次幂计算器163至复数平方计算器164以及在用于非线性失真均衡的系数估计器162中用于每一阶的复数第m次幂电路的后级提供根升余弦滤波器103。
在此,图10示出对每个一阶提供延迟元件129的情况。但是,一个延迟元件129可以被共享,从而延迟元件129的输出信号被分布到163至复数平方计算器164和用于每一阶的复数m次幂电路。
另外,上述例子包括复数第K次幂计算器163和复数平方计算器164等等,以及用于每一阶的复数第m次幂电路。但是,通过使用例如I和Q轴分量自乘并且随后输出到下一个较高阶的电路这样的配置,可以实现该电路的共享。另外,可以使用其它用于电路共享的方法。
实施例2
下面将参照附图描述本发明实施例2的用于数据接收器的前端处理器。图11为示出用于根据本实施例的数据接收器的前端处理器200。用于数据接收器的前端处理器200包括准同步检测器108和非线性失真均衡器201。根据本实施例的非线性失真均衡器201与实施例1的非线性失真均衡器101不同之处在于用于非线性失真均衡的系数估计器202。非线性失真均衡器201的特征在于位于图3的非线性失真均衡器101的前级的载波恢复电路111被提供在非线性失真均衡器201的根升余弦滤波器103的后级中。准同步检测器108与图3中所示相同,并且在非线性失真均衡器201中的每个其它模块与图3的非线性失真均衡器101的每个模块相同。
按照与实施例1相同的方式,准同步检测器108对于由未示出的天线所接收的调制信号检测I轴和Q轴数据,以产生所检测输出数据x(n)。
现在将描述这种结构的非线性失真均衡器201的操作。用于非线性失真均衡的复数信号转换器102按照与实施例1相同的方式,通过使用在用于非线性失真均衡的系数估计器202中产生的用于第三阶失真均衡的系数a3(n),消除包含在所检测信号x(n)中的第三阶失真。然后,根升余弦滤波器103仅仅允许奈奎斯特带宽中的信号通过,并且输出频带限制信号v(n)。接着,载波恢复电路111消除v(n)的相位误差e-jP(n),并且把建立相位同步的信号s(n)输出到误差估计器104。
误差估计器104计算该信号s(n)与最接近于信号s(n)的映射点d(n)之间的误差。另外,误差估计器104把信号d(n)输出到未示出的误差纠正部分,作为解调信号。在此,在该误差纠正部分执行软判定解码的情况下,非线性失真均衡器201把误差估计器104的输入信号s(n)输出到该误差纠正部分,作为一个解调信号。用于非线性失真均衡的复数信号转换器102使用该误差信号e(n)和信号x(n)以及在载波恢复电路111中产生的相位旋转信号ejP(n),从而通过使用LMS算法更新该系数a3(n)。
用于非线性失真均衡的系数估计器202的结构在图12中示出。用于非线性失真均衡的系数估计器202是通过把相位旋转校正器211添加到实施例1的用于非线性失真均衡的系数估计器105而获得的。相位旋转校正器211具有减法器212和复数乘法器213在此,用于非线性失真均衡的系数估计器202的每个其它模块与图5的用于非线性失真均衡的系数估计器105中的相同。
现在将描述用于非线性失真均衡的系数估计器202的操作。当在图12中输入所检测的输出x(n)时,延迟元件129和复数立方计算器121把该信号x(n)转换为|x2(n-M)|x(n-M),并且把转换结果输出到LMS电路130,作为立方值x3(n-M)。另一方面,当输入旋转信号ejP(n)时,减法器212使Q轴信号的符号反相,从而该相位旋转校正器211产生复数共轭e-jP(n)。复数乘法器213执行该复数共轭e-jP(n)与误差信号e(n)之间的乘法,并且纠正在载波恢复电路111中执行的相位旋转,从而把纠正结果输出到LMS电路130。该LMS电路130按照实施例1中的方式,使用|x2(n-M)|x(n-M)和e-jP(n)作为输入执行系数的更新,从而把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的非线性失真均衡器101。
在建立相位同步的载波恢复电路111存在于用于非线性失真均衡的复数信号转换器102和误差估计器104之间的情况中,可以通过纠正在载波恢复电路111中执行的相位旋转而补偿复数信号中的非线性失真。
通过把相位旋转校正添加到方程(1-7)中,而把用于非线性失真均衡的系数估计器202的系数更新算法表示为如下方程:
a3(n+1)=a3(n)+ue(n)[x3(n)]*e-jP(n)…方程(2-1)
另一方面,参照图12,系数a3(n)在如下方程中表示:
a3(n)=a3(n-1)+ue(n-M)[|x2(n-M)|x(n-M)]*e-jP(n-M)…方程(2-2)
在此,从假设把信号x(n)延迟N个符号而获得的信号s(n)中产生的误差信号e(n),通过设置[|x2(n-M)|x(n-M)]*=[x3(n-M)]*而在方程(2-2)中执行延迟调节。通过考虑该M个符合的延迟,把误差信号表示为e(n-M),并且相位旋转校正表示为e-jP(n-M)。
另外,尽管系数a3(n)与方程(2-2)中的误差信号e(n)、信号x(n)和相位信号e-jP(n)相比被延迟一个符号,该系数更新收敛速度相对较慢,并且在实践上不会对LMS算法造成问题。
在根据本实施例的非线性失真均衡器中,用于非线性失真均衡的复数信号转换器102的输出y(n)通过根升余弦滤波器103。通过考虑这种情况,能够以更高的精度补偿在复数信号中的非线性失真。
在考虑到该输出通过根升余弦滤波器103的情况,用于非线性失真均衡的系数估计器221的结构在图13中示出。用于非线性失真均衡的系数估计器221是通过取消延迟元件129并且在图12的用于非线性失真均衡的系数估计器202中的复数立方计算器121的后级提供一个根升余弦滤波器103而获得的。在该后级的LMS电路130以及产生LMS电路130的其它输入的相位旋转校正器211与图12中所示的相同。
当把所检测输出x(n)输入到用于非线性失真均衡的系数估计器221时,复数立方计算器121把该信号x(n)转换为|x2(n)|x(n),并且输出转换结果作为立方值x3(n)。该根升余弦滤波器103对转换结果执行频带限制,并且把∑CkFIL|x2(n-k)|x(n-k)输出到LMS电路130。在此CkFIL是根升余弦滤波器103的每个系数。由于根升余弦滤波器103的延迟量为M个符号,因此不需要图12所示的延迟元件129。
另一方面,当按照与图12中相同的方式输入相位旋转信号ejP(n)和误差信号e(n)时,相位旋转校正器211纠正在载波恢复电路111中执行的相位旋转,并且把e(n)e-jP(n)输出到LMS电路130。该LMS电路130通过使用这两个信号更新用于第三阶失真均衡的系数a3(n),并且把结果输出到用于非线性失真均衡的复数信号转换器102。在这种情况中的系数a3(n)用如下方程表示:
a3(n+1)=a3(n)+ue(n)[∑CkFIL x3(n-k)]*e-jP(n)…方程(2-3)
根据上述操作,可以用较高精度补偿在复数信号中的非线性失真。另外,图12的用于非线性失真均衡的系数估计器202和图13的用于非线性失真均衡的系数估计器221可以在建立相位同步之后开始系数更新。与实施例1相同,当在滤波器输出稳定的情况下建立相位同步时,在图1中的载波恢复电路111中的低通滤波器113把锁定信号设置在“H”。
按照与实施例1相同的方式,在锁定信号为“L”的情况中,图12的用于非线性失真均衡的系数估计器202和图13的用于非线性失真均衡的系数估计器221设置a3(n)=0、并且用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。然后,在锁定信号为“H”的情况下,开始系数更新。根据上述操作,在复数信号中的非线性失真能够被补偿,而没有对载波恢复电路111的操作造成不良影响。
另外,图12的用于非线性失真均衡的系数估计器202和图13的用于非线性失真均衡的系数估计器221可以仅仅在高C/N的时候执行系数更新。按照与实施例1相同的方式,在图11的非线性失真均衡器201中提供一个C/N估计器116。然后,该C/N估计器116计算和平均该C/N,并且把结果输出到图12的用于非线性失真均衡的系数估计器202和图13的用于非线性失真均衡的系数估计器221,作为CNR信号。
在由CNR信号所示的C/N小于该设置阈值的情况下,图12的用于非线性失真均衡的系数估计器202和图13的用于非线性失真均衡的系数估计器221设置a3(n)=0,并且用于非线性失真均衡的复数信号转换器102按照与实施例1相同的方式输出y(n)=x(n)。在由CNR信号所示的C/N为该设置阈值或更大的情况下,用于非线性失真均衡的系数估计器执行系数更新。根据上述操作,当C/N为低时,可以补偿在复数信号中的非线性失真而没有负面影响。
在此,尽管在本实施例中仅仅把在非线性失真中显著的第三阶失真消除,如方程(1-1)和(2-1)所示,可以按照实施例1相同的方式通过使用方程(1-11)补偿第二阶或更高阶的任何高阶的非线性失真。在这种情况下的系数更新方程变为如下:
am(n+1)=am(n)+ue(n)[xm(n)]*e-jP(n)…方程(2-4)
其中形成xm(n)=|xm-1(n)|x(n)。
在图14中示出用于非线性失真均衡的系数估计器231的结构,其补偿至少第二阶失真并且不大于第K阶失真的高阶非线性失真。在此,在该图中用于非线性失真均衡的复数信号转换器161与实施例1的情况相同。用于非线性失真均衡的系数估计器231是通过把相位旋转校正器211添加到图10的用于非线性失真均衡的系数估计器162而获得的。
当输入所检测的输出x(n)时,用于非线性失真均衡的系数估计器231产生|xK-1(n-M)|x(n-M),作为升高到第K次幂xK(n-M)的数值,并且按照与实施例1相同的方式产生|x(n-M)|x(n-M)作为x2(n-M),然后输出到LMS电路130。另一方面,当输入相位旋转信号ejP(n)和误差信号e(n)时,相位旋转校正器211按照与图12中的情况相同的方式纠正在载波恢复电路111中执行的相位旋转,并且把e(n)e-jP(n)输出到LMS电路130。
通过使用两个这样的信号,LMS电路130执行系数更新,并且把用于第K阶失真均衡的系数aK(n)以及用于第二阶失真均衡的系数a2(n)输出到用于非线性失真均衡的复数信号转换器161。对于其它阶次,按照与上述相同的方式,当给出|xm-1(n)|x(n)作为升高到第m次幂的数值xm(n)时,LMS电路130通过使用升高到第m次幂的数值和e(n)e-jP(n)执行系数更新,并且把用于第m阶失真均衡的系数am(n)输出到用于非线性失真均衡的复数信号转换器161。另外,根据与实施例1中所述相同的操作,用于非线性失真均衡的复数信号转换器161输出y(n),如方程(1-11)所示。根据上述操作,可以补偿第二阶或更高阶的任意高阶非线性失真。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过根升余弦滤波器103。考虑到这种情况,在用较高的精度补偿复数信号中的非线性失真的情况中,可以补偿第二阶或更高阶的任意高阶非线性失真。在这种情况中,在用于非线性失真均衡的系数估计器231中,每一阶的延迟元件129被消除,并且添加一个复数第K次幂计算器163以及一个复数平方计算器164,另外把一个根升余弦滤波器103添加到每一阶的复数第m次幂计算器的后级。
在此,尽管图14中示出对每一阶提供延迟元件129的情况,但是一个延迟元件129可以被共享,从而延迟信号被发布到用于每一阶的复数第K次幂计算器163、复数平方计算器164和复数第m次幂计算器。
另外,在上述例子中,示出一种情况,其中分别提供用于每一阶的复数第K次幂计算器163、复数平方计算器164和复数第m次幂计算器。但是,通过把I和Q轴分量的升高到一个次幂的每个数值例如顺序输出到下一个高阶电路可以实现一个共享电路。否则,可以使用其它共享方法。
实施例3
下面,参照附图描述用于根据本发明的实施例3的数据接收器的前端处理器。图15为示出用于根据本实施例的数据接收器的一个前端处理器300的结构。用于数据接收器的前端处理器300包括一个准同步检测量108、载波恢复电路111和非线性失真均衡器301。该非线性失真均衡器301不同于实施例1的非线性失真均衡器101之处在于用于非线性失真均衡的系数估计器302的结构。在该非线性失真均衡器301中,用于线性失真均衡的复数信号转换器303被添加到根升余弦滤波器103的后级。用于线性失真均衡的复数信号转换器303在附图中缩写为“COMP SIG CONV2”。用于线性失真均衡的系数估计器304在附图中简称为“COEF EST 2”。准同步检测器108和载波恢复电路111与图3中所示的相同。另外,在非线性失真均衡器301中的每个其它模块与图3的非线性均衡器101中的每个模块相同。
按照与实施例1相同的方式,准同步检测器108从由天线(未示出)接收的调制信号检测I轴和Q数据。然后,载波恢复电路111除去所检测输出的相位误差e-jP(n)并且产生建立相位同步的信号x(n),然后输出到非线性失真均衡器301。
现在描述按照这种方式形成的非线性失真均衡器301的操作。按照与实施例1相同的方式,用于非线性失真均衡的复数信号转换器102使用在用于非线性失真均衡的系数估计器302中产生的用于第三阶失真均衡的系数a3(n),以消除包括在信号x(n)中的第三阶失真。然后,根升余弦滤波器103仅仅允许在奈奎斯特频段中的信号通过,并且输出频带限制信号v(n)。用于线性失真均衡的复数信号转换器303使用在用于线性失真均衡的系数估计器304中产生的每个抽头系数CkLEQ(n),从而消除包含在信号v(n)中的线性失真,并且输出信号w(n)。
误差估计器104按照与实施例1相同方式计算误差信号e(n),并且把最接近与该信号w(n)的映射点d(n)输出到未示出的误差校正部分,作为解调信号。在此,在该误差校正部分执行软判定解码的情况下,非线性失真均衡器301把误差估计器104的输入w(n)输出到该误差校正部分作为一个解调信号。用于线性失真均衡的系数估计器304使用该误差信号e(n)和信号v(n),从而根据LMS算法更新CkLEQ(n)。另外,用于非线性失真均衡的系数估计器302使用该误差信号e(n)和信号x(n),从而根据LMS算法更新系数a3(n)。
用于线性失真均衡的复数信号转换器303在图16中示出。另外,用于线性失真均衡的系数估计器304在图17中示出。用于线性失真均衡的复数信号转换器303具有延迟元件311和312、复数乘法器313、314和315以及复法加法器316。另外,图17的用于线性失真均衡的复数乘法器314具有延迟元件317和318以及(N+L+1)个LMS电路130。
在此,如图16中所示,提供N个抽头用于提前的虚波均衡(ghostequalization),以及提供L个抽头用于延迟的虚波均衡。相应地,用于线性失真均衡的复数信号转换器303和用于线性失真均衡的系数估计器304分别总共具有(N+L)个延迟元件。另外,用于线性失真均衡的复数信号转换器303总共具有(N+L+1)个复数乘法器。然后,在中央抽头的延迟量变为N个符号。在此,对于用于线性失真均衡的复数信号转换器303和对于用于线性失真均衡的系数估计器304所需的总数为(N+L)的延迟元件可以共享。
在图16中,当输入频带限制信号v(n)时,用于线性失真均衡的复数信号转换器303通过利用(N+L)个延迟元件把该信号v(n)移动一个符号。总数为(N+L+1)的复数乘法器执行在用于线性失真均衡的系数估计器304中产生的每个抽头系数CkLEQ(n)与抽头输入v(n-k)之间的复数乘法。复法加法器316执行每个乘法结果的复数加法,从而输出通过从信号v(n)中消除虚波而获得的信号w(n)。因此,该信号w(n)由如下方程所表示。在此,初始值CkLEQ(n)=0。
W(n)=∑CkLEQ(n)v(n-k) …方程(3-1)
在图17中,当输入频带限制信号v(n)时,用于线性失真均衡的系数估计器304通过使用(N+L)个延迟元件把信号v(n)移动一个符号。总数为(N+L+1)的LMS电路130使用该误差信号e(n)和抽头输入v(n-k),从而根据LMS算法产生每个抽头系数CkLEQ(n),其被输出到用于线性失真均衡的复数信号转换器303。在此,当步长参数为λ时,CkLEQ(n)在如下方程中表示。
CkLEQ(n+1)=CkLEQ(n)+λe(n)v(n)*…方程(3-2)
用于非线性失真均衡的系数估计器302的结构在图18中示出。用于非线性失真均衡的系数估计器302可以通过把实施例1中的用于非线性失真均衡的系数估计器105的延迟元件129替换为延迟元件321而获得。每个其它模块与图5中所示的相同。在此,如图15中所示,根升余弦滤波器103的延迟量为M个符号,并且用于线性失真均衡的复数信号转换器303的延迟量为N个符号,而误差估计器104的延迟量为0。延迟元件321执行(M+N)个符号的延迟调节,直到从该信号y(n)计算出误差信号e(n)为止。
当建立相位同步的信号x(n)被输入到用于非线性失真均衡的系数估计器302时,该延迟元件321产生(M+N)个符号的延迟。然后,复数立方计算器121把该信号x(n)转换为|x2(n-M-N)|x(n-M-N),从而该转换结果被输出为立方值x3(n-M-N)。LMS电路130使用该立方值x3(n-M-N)以及误差信号e(n),从而根据LMS算法产生用于第三阶失真均衡的系数a3(n),其被输出到用于非线性失真均衡的复数信号转换器102。
用于非线性失真均衡的系数估计器302的系数更新算法由方程(1-8)所表示。另一方面,系数a3(n)在来自图18的如下方程中表示。
a3(n)=a3(n-1)+ue(n-M-N)[|x2(n-M-N)|x(n-M-N)]*…方程(3-3)
信号w(n)是通过把信号x(n)延迟(M+N)个符号而获得的。在此,从信号w(n)产生误差信号e(n),因此系数更新方程的延迟被根据在方程(3-3)中的[|x2(n-M-N)|x(n-M-N)]*(=[x3(n-M-N)]*)而调节。
通过考虑到(M+N)个符号的延迟,该误差信号被表示这e(n-M-N)。另外,在方程(3-3)中,系数a3(n)与误差信号e(n)和信号x(n)相比被延迟一个符号。但是,在LMS算法中,系数更新的收敛速度相对较慢,因此这些延迟实际上不是一个障碍。根据上述操作,可以补偿线性失真以及在复数信号中的非线性失真。
在此,在本实施例中,用于非线性失真均衡的复数信号转换器102的输出y(n)通过根升余弦滤波器103。考虑到这种情况,可以较高精度地补偿在复数信号中的非线性失真。
图19中示出在考虑到通过根升余弦滤波器103的情况下用于非线性失真均衡的系数估计器331的结构。用于非线性失真均衡的系数估计器331的特征在于延迟元件321被延迟元件332所代替,并且在用于非线性失真均衡的系数估计器302中的复数立方计算器121的后级提供根升余弦滤波器103。在该后级的LMS电路130与图18中所示的相同。
在图19中,当建立相位同步的信号x(n)被输入到用于非线性失真均衡的系数估计器331时,延迟元件332把该信号x(n)延迟N个符号。然后,复数立方计算器121把延迟元件332的输出转换为|x2(n-N)|x(n-N),并且输出转换结果,作为立方值x3(n-N)。然后,根升余弦滤波器103执行频带限制,从而产生被输出到LMS电路130的∑CkFIL|x2(n-N-k)|x(n-N-k)。由于在根升余弦滤波器103中的系数的延迟量为M个符号,延迟元件321被延迟元件332所代替,并且在根升余弦滤波器103的输出上的延迟量总共为(M+N)个符号。
LMS电路130使用根升余弦滤波器103和误差信号e(n),从而根据LMS算法更新用于第三阶失真均衡的系数a3(n),然后输出到用于非线性失真均衡的复数信号转换器102。相应地,系数a3(n)在方程(1-10)中表示。根据这种运算,可以较高精度地补偿在复数信号中的非线性失真。
另外,通过考虑到用于非线性失真均衡的复数信号转换器102的输出y(n)通过用于线性失真均衡的复数信号转换器303,可以较高精度地补偿在复数信号中的非线性失真。图20中示出在考虑到输出y(n)通过用于线性失真均衡的复数信号转换器303的情况下用于非线性失真均衡的系数估计器341的结构。
用于非线性失真均衡的系数估计器341的特征在于延迟元件321被延迟元件129所代替,并且在图18的用于非线性失真均衡的系数估计器302中的复数立方计算器121的后级提供用于线性失真均衡的复数信号转换器303。在该后级的LMS电路130与图18的情况相同。
当建立相位同步的信号x(n)被输入到用于非线性失真均衡的系数估计器341时,延迟元件129把信号x(n)延迟M个符号。然后,复数立方计算器121把延迟元件129的输出转换为|x2(n-N)|x(n-N),并且输出该转换结果为立方值x3(n-N)。用于线性失真均衡的复数信号转换器303把该输出x3(n-N)转换为被输出到LMS电路130的∑CkLEQ(n)|x2(n-N-k)|x(n-N-k)。
由于用于线性失真均衡的复数信号转换器303的延迟量为N个符号,因此该延迟元件321被延迟元件129所代替,从而在用于线性失真均衡的复数信号转换器303的输出的延迟量总共变为(M+N)个符号。LMS电路130使用用于线性失真均衡的复数信号转换器303和误差信号e(n)来根据LMS算法更新用于第三阶失真均衡的系数a3(n),其被输出到用于非线性失真均衡的复数信号转换器102。在这种情况中,在系数a3(n)和a3(n+1)之间的关系在如下方程中表示。
a3(n+1)=a3(n)+ue(n)[∑CkLEQ(n)x3(n-k)]*…方程(3-4)
根据这种运算,能够以较高的精度补偿在复数信号中的非线性失真。另外,用于非线性失真均衡的复数信号转换器102的输出y(n)通过根升余弦滤波器103和用于线性失真均衡的复数信号转换器303。考虑到这种情况,能够以较高的精度补偿在复数信号中的非线性失真。
图21中示出在考虑到输出y(n)通过根升余弦滤波器103和用于线性失真均衡的复数信号转换器303的情况下用于非线性失真均衡的系数估计器351的结构。用于非线性失真均衡的系数估计器351的特征在于取消了延迟元件321,并且在图18的用于非线性失真均衡的系数估计器302中的复数立方计算器121的后级提供根升余弦滤波器103和用于线性失真均衡的复数信号转换器303。在该后级的LMS电路130与图18的情况相同。
在图21中,当建立相位同步的信号x(n)被输入到用于非线性失真均衡的系数估计器351时,复数立方计算器121把该信号x(n)转换为|x2(n)|x(n),并且输出该转换结果为立方值x3(n)。然后,根升余弦滤波器103执行该立方值x3(n),以产生z(n)=∑CkFIL|x2(n-k)|x(n-k),其被输出到用于线性失真均衡的复数信号转换器303。用于线性失真均衡的复数信号转换器303把根升余弦滤波器103的输出转换并把∑CiLEQ(n)z(n-i)输出到LMS电路130。
在此,根升余弦滤波器103的延迟量为M个符号,并且用于线性失真均衡的复数信号转换器303的延迟量为N个符号。因此,取消延迟元件321,从而用于线性失真均衡的复数信号转换器303的输出的延迟量总共变为(M+N)个符号。LMS电路130使用用于线性失真均衡的复数信号转换器303的输出信号和误差信号e(n),以根据LMS算法更新用于第三阶失真均衡的系数a3(n),其被输出到用于非线性失真均衡的复数信号转换器102。这种情况中,系数a3(n)与系数a3(n+1)之间的关系在如下方程中表示:
a3(n+1)=a3(n)+ue(n)[∑CiLEQ(n)z(n-i)]*…方程(3-5)
z(n)=∑CkFILx3(n-k)…方程(3-6)
根据这种运算,能够以较高的精度补偿在复数信号中的非线性失真。
另外,图18的用于非线性失真均衡的系数估计器302、图19的用于非线性失真均衡的系数估计器331、图20的用于非线性失真均衡的系数估计器341以及图21的用于非线性失真均衡的系数估计器351分别在建立相位同步之后开始系数更新。在载波恢复电路111中的低通滤波器113按照与实施例1相同的方式监控图15中的滤波器输出,并且当在输出稳定的情况下建立相位同步时,把锁定信号设置在“H”。
图18的用于非线性失真均衡的系数估计器302、图19的用于非线性失真均衡的系数估计器331、图20的用于非线性失真均衡的系数估计器341以及图21的用于非线性失真均衡的系数估计器351按照实施例1的相同方式在锁定信号为“L”的情况下设置a3(n)=0,并且用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。在锁定信号为“H”的情况下,用于非线性失真均衡的系数估计器开始系数更新。这种运算不会对载波恢复电路111的运算产生不良影响,从而可以补偿在复数信号中的非线性失真。
另外,图18的用于非线性失真均衡的系数估计器302、图19的用于非线性失真均衡的系数估计器331、图20的用于非线性失真均衡的系数估计器341以及图21的用于非线性失真均衡的系数估计器351可以在线性失真均衡收敛之后开始系数更新。如图17中所示,在用于非线性失真均衡的系数估计器304中提供一个中央抽头系数监视器(CTCOE MON1)319,从而该电路观察中央抽头系数,并且当线性失真均衡在系数稳定的情况下收敛时把收敛信号设置在“H”。
该收敛信号被输入到用于非线性失真均衡的系数估计器302。在图18的用于非线性失真均衡的系数估计器302中,在LMS电路130中的步长参数控制器133把步长参数设置为u=0,从而在收敛信号为“L”的情况下设置a3(n)=0。然后,用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。在该收敛信号为“H”的情况下,步长参数控制器133把预定数值代替该步长参数u,从而开始系数更新。
图19的用于非线性失真均衡的系数估计器331、图20的用于非线性失真均衡的系数估计器341以及图21的用于非线性失真均衡的系数估计器351按照相同方式工作。根据上述运算,线性失真均衡的的收敛运算不会产生不良影响,并且可以补偿在复数信号中的线性失真。
另外,图18的用于非线性失真均衡的系数估计器302、图19的用于非线性失真均衡的系数估计器331、图20的用于非线性失真均衡的系数估计器341以及图21的用于非线性失真均衡的系数估计器351还可以设置为仅仅在高C/N时执行系数更新。按照实施例1中的相同方式在图15的非线性失真均衡器301中提供一个C/N估计器116,并且C/N估计器116计算并平均该C/N,从而输出该结果作为一个CNR信号。
图18的用于非线性失真均衡的系数估计器302、图19的用于非线性失真均衡的系数估计器331、图20的用于非线性失真均衡的系数估计器341以及图21的用于非线性失真均衡的系数估计器351在由CNR信号所表示的C/N小于设置的阈值的情况下按照实施例1的相同方式设置a3(n)=0。然后用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。另外,在由CNR信号所表示的C/N不小于设置的阈值的情况下,执行系数更新。根据上述操作,在低C/N时不会造成不良影响,从而可以补偿在复数信号中的非线性失真。
在此,在本实施例中,仅仅消除如方程(1-1)和(1-8)所示的作为非线性失真的主要的第三阶失真。通过按照与实施例1相同的方式使用方程(1-11),可以补偿第二阶失真或更高阶的任意高阶非线性失真。这种情况的系数更新方程是通过对如下各阶应用方程(1-12)而实现的:
xm(n)=|xm-1(n)|x(n).
在图22中示出补偿不低于第二阶失真并且不高于第K阶失真的高阶非线性失真的用于非线性失真均衡的系数估计器361的结构。在此,用于非线性失真均衡的复数信号转换器161与图9中所示的实施例1的情况相同。图22的用于非线性失真均衡的系数估计器361是通过用延迟元件321代替在图10中所示的用于非线性失真均衡的系数估计器162中的每一阶的延迟元件129而获得的。
用于非线性失真均衡的系数估计器361的操作与实施例1相同,只是当输入建立相位同步的信号x(n)时,每一阶的延迟元件321把该信号延迟(M+N)个符号。另外,用于非线性失真均衡的复数信号转换器161按照与实施例1相同的方式输出方程(1-11)中所示的y(n)。根据上述操作,可以补偿第二阶失真或更高阶的任意高阶非线性失真。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过根升余弦滤波器103。考虑到这种情况,在用较高精度补偿在复数信号中的非线性失真的情况下,可以补偿第二阶失真或更高阶的任意高阶非线性失真。这种情况中,每一阶的延迟元件321被延迟元件332所代替,并且提供一个复数第K次幂计算器163和复数平方计算器164,另外在用于非线性失真均衡的系数估计器361中的每一阶的复数第m次幂计算器的后级提供根升余弦滤波器103。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过用于线性失真均衡的复数信号转换器303。考虑到这种情况,在用较高精度补偿得数信号中的非线性失真情况中,可以按照相同的方式补偿第二阶失真或更高阶的任意高阶非线性失真。这种情况中,每一阶的延迟元件321被延迟元件129所代替,并且提供复数第K次幂计算器163和复数平方计算器164,另外在用于非线性失真均衡的系数估计器361中的第一阶的复数第m次幂计算器的后级提供用于线性失真均衡的复数信号转换器303。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过根升余弦滤波器103和用于线性失真均衡的复数信号转换器303。考虑到这种情况,在用较高粗度补偿中的非线性失真的情况下,可以按照相同的方式补偿第二阶失真或更高阶的任意高阶非线性失真。这种情况中,取消第一阶的延迟元件321,在复数第K次幂计算器163和复数平方计算器164以及在用于非线性失真均衡的系数估计器361中的每一阶的复数第m次幂计算器的后级提供根升余弦滤波器103和用于线性失真均衡的复数信号转换器303。
在此,尽管在上述例子中示出为每一阶提供一个延迟元件的情况,但是可以使用一个结构,其中一个延迟元件被共享,并且输出信号被发布到复数第K次幂计算器163、复数平方计算器164以及每一阶的复数第m次幂计算器。
另外,在上述例子中,示出一种情况,其中分别提供复数第K次幂计算器163、复数平方计算器164和每一阶的复数第m次幂计算器。但是,可以通过例如把I和Q轴分量的次幂顺序输出到较高阶的下一个电路而实现电路的共享。另外,可以使用其它共享方法。
实施例4
下面,参照附图描述本发明的实施例4中的用于数据接收器的前端处理器。图23为示出在本实施例中用于数据接收器的前端处理器400的结构的方框图。形成用于数据接收器的前端处理器400包括一个准同步检测器108和非线性失真均衡器401。通过改变在实施例3中的非线性失真均衡器301的用于非线性失真均衡的系数估计器302和用于线性失真均衡的系数估计器304的结构而获得非线性失真均衡器401,其特征在于非线性失真均衡器301前级的载波恢复电路111被提供在非线性失真均衡器401中的用于线性失真均衡的复数信号转换器303的后级。准同步检测器108与图15中所示的相同,并且在非线性失真均衡器401中的每个其它模块与图15中的非线性失真均衡器301的每个模块相同。
按照与实施例1相同的方式,准同步检测器108检测由未示出的天线所接收的调制信号的准I轴和Q轴数据,从而把所检测的输出x(n)给予非线性失真均衡器401。
在此描述非线性失真均衡器401的操作。通过使用在用于非线性失真均衡的系数估计器402中产生的用于第三阶失真均衡的系数a3(n),用于非线性失真均衡的复数信号转换器102按照与实施例1相同的方式消除包含在非线性信号x(n)中的第三阶失真。然后,根升余弦滤波器103仅仅允许在奈奎斯特带宽中的信号通过,并且输出该带宽限制信号v(n)。按照与实施例3相同的方式,用于线性失真均衡的复数信号转换器303使用在用于线性失真均衡的系数估计器403中产生的每个抽头参数CkLEQ(n),从而输出消除信号v(n)中的线性失真之后的信号w(n)。
载波恢复电路111消除w(n)中的相位误差e-jP(n),并且把建立相位同步的信号s(n)输出到误差估计器104。误差估计器104计算信号s(n)与最接近的映射点d(n)之间的误差,并且把该映射点d(n)输出到未示出的误差校正部分,作为一个解调信号。在此,在误着校正部分执行软判定解码的情况下,非线性失真均衡器401把误差估计器104的输入s(n)输出到该误着校正部分作为一个解调信号。用于非线性失真均衡的系数估计器402使用该误差信号e(n)、在载波恢复电路111中产生的相位旋转信号ejP(n)以及x(n),以根据LMS算法更新系数a3(n)。另外,用于线性失真均衡的系数估计器403使用该误差信号e(n)、信号ejP(n)以及信号v(n),从而根据LMS算法更新CkLEQ(n)。
用于线性失真均衡的系数估计器403的结构在图24中示出。用于线性失真均衡的系数估计器403的特征在于在实施例3的用于线性失真均衡的系数估计器304中提供一个相位旋转纠正器211。在用于线性失真均衡的系数估计器403中的每个其它模块与图17的用于线性失真均衡的系数估计器304中的每个模块相同。在此,在用于线性失真均衡的复数信号转换器303以及用于线性失真均衡的系数估计器403中分别提供的总数为(N+L)个延迟元件可以共享。
当在图24中输入频带限制信号v(n),时用于线性失真均衡的系数估计器403按照与实施例3相同的方式使用(N+L)个延迟元件,从而一次把信号v(n)移动一个符号。另一方面,当输入相位旋转信号ejP(n)时,相位旋转校正器211纠正在载波恢复电路111中执行的相位旋转,从而把e(n)e-jP(n)输出到(N+L+1)个LMS电路130。
LMS电路130使用LMS算法对于v(n-k)和e(n)e-jP(n)的输入产生每个抽头参数CkLEQ(n),其它输出到用于线性失真均衡的复数信号转换器303。在此,当步长参数为λ时,该系数CkLEQ(n)在如下方程中表示:
CkLEQ(n+1)=CkLEQ(n)+λe(n)v(n)*e-jP(n)…方程(4-1).
用于非线性失真均衡的系数估计器402的结构在图25中示出。用于非线性失真均衡的系数估计器402的特征在于在实施例3中在用于非线性失真均衡的系数估计器302中提供一个相位旋转校正器211。在用于非线性失真均衡的系数估计器402中的每个其它模块与图18中所示的每个模块相同。
当所检测的输出x(n)被输入到用于非线性失真均衡的系数估计器402时,延迟元件321和复数立方计算器121按照与实施例3相同的方式把该信号x(n)转换为|x2(n-M-N)|x(n-M-N),并且把转换结构输出到LMS电路130作为x3(n-M-N)。另一方面,当输输入误差信号e(n)和相位旋转信号ejP(n)时,相位旋转校正器211纠正在载波恢复电路111中执行的相位旋转,并且把e(n)e-jP(n)输出到LMS电路130。LMS电路130对|x2(n-M-N)|x(n-M-N)和e(n)e-jP(n)的输入执行系数更新,并且把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的复数信号转换器102。
用于非线性失真均衡的系数估计器402的系数更新算法在方程(2-1)中表示。而系数a3(n)在如下方程中表示:
a3(n)=a3(n-1)+ue(n-M-N)[|x2(n-M-N)|x(n-M-N)]*e-jP(n-M-N)…方程(4-2).
从通过把信号x(n)延迟(M+N)个符号而获得的信号s(n)产生误差信号e(n)。因此,通过设置[|x2(n-M-N)|x(n-M-N)]*=[x3(n-M-N)]*而在方程(4-2)中执行延迟调节。
通过考虑到该(M+N)个符号的延迟,误差信号和相位旋转纠正量分别由e(n-M-N)和e-jP(n-M-N)所表示。另外,与在方程(4-2)中的误差信号e(n)、信号x(n)和相位旋转信号e-jP(n)相比,系数a3(n)被延迟一个符号。但是,由于LMS算法在系数更新的收敛速度上相对较慢,因此该延迟实际上不造成障碍。
根据上述操作,在建立相位同步的载波恢复电路111存在于用于非线性失真均衡的复数信号转换器102和误差估计器104之间的情况中,通过纠正在载波恢复电路111中执行的相位旋转,补偿线性失真,并且可以补偿在复数信号中的非线性失真。
在此,用于非线性失真均衡的复数信号转换器102的输出y(n)通过在本实施例的非线性失真均衡器中的根升余弦滤波器103。通过考虑到这种情况,可以用较高的精度补偿复数信号中的非线性失真。
图26中示出在考虑到信号通过根升余弦滤波器103的情况的用于非线性失真均衡的系数估计器411的结构。用于非线性失真均衡的系数估计器411的特征在于用延迟元件332代替延迟元件321,并且在图25的用于非线性失真均衡的系数估计器402中的复数立方计算器121的后级提供一个根升余弦滤波器103。该后级的LMS电路130以及产生到LMS电路130的另一个输入的相位旋转校正器211与图25中所示的相同。
在图26中,当所检测输出x(n)被输入到用于非线性失真均衡的系数估计器411时,延迟元件322产生N个符号的延迟。复数立方计算器121把该输入信号|x2(n-N)|x(n-N)转换并输出转换结果x3(n-N)。然后,根升余弦滤波器103对该转换结果执行频带限制,并且把∑CkFIL|x2(n-N-k)|x(n-N-k)输出到LMS电路130。在此,CkFIL是根升余弦滤波器103的每个系数。
由于根升余弦滤波器103的延迟量为M个符号,因此通过使用延迟元件332把在根升余弦滤波器103的输出的延迟量总共设置为(M+N)个符号。另一方面,当输入相位旋转信号ejP(n)和误差信号e(n)时,相位旋转校正器211按照与图25的情况相同方式纠正在载波恢复电路111中执行的相位旋转,并且把e(n)e-jP(n)输出到LMS电路130。通过使用这两个信号,LMS电路130更新用于第三阶失真均衡的系数a3(n),其被输出到用于非线性失真均衡的复数信号转换器102。这种情况中,该系数a3(n)由如下方程所表示:
a3(n+1)=a3(n)+ue(n)[∑CkFIL|x3(n-k)]*e-jP(n)…方程(4-3)
根据这些操作,能够以较高精度补偿在复数信号中的非线性失真。
另外,用于非线性失真均衡的复数信号转换器102的输出y(n)通过用于线性失真均衡的复数信号转换器303。考虑到这种情况,能够以较高的精度补偿在复数信号中的非线性失真。
图27中示出在考虑到该信号通过用于线性失真均衡的复数信号转换器303的情况下用于非线性失真均衡的系数估计器421的结构。用于非线性失真均衡的系数估计器421的特征在于延迟元件321被延迟元件129所代替,并且用于线性失真均衡的复数信号转换器303被提供在图25的用于非线性失真均衡的系数估计器402中的复数立方计算器121的后级。该后级的LMS电路130和产生LMS电路130的另一个输入的相位旋转校正器211与图25中所示的相同。
在图27中,当把所检测输出x(n)输入到用于非线性失真均衡的系数估计器421时,延迟元件129把该信号x(n)延迟M个符号。复数立方计算器121把该输入信号转换为|x2(n-M)|x(n-M),并且输出该转换结果为立方值x3(n-M)。用于线性失真均衡的复数信号转换器303对该转换结果进行变换,并且把∑CkLEQ(n)|x2(n-M-k)|x(n-M-k)输出到LMS电路130。用于线性失真均衡的复数信号转换器303的延迟量为N个符号。因此,通过用延迟元件129代替延迟元件321,在用于线性失真均衡的复数信号转换器303的输出的延迟量总共被设置为(M+N)个符号。
另一方面,当输入相位旋转信号ejP(n)和误差信号e(n)时,相位旋转校正器211纠正在载波恢复电路111中执行的该相位旋转,并且把e(n)e-jP(n)输出到LMS电路130。LMS电路130使用这两个信号来根据LMS算法更新用于第三阶失真均衡的系数a3(n)。这种情况的系数a3(n)在如下方程中表示:
a3(n+1)=a3(n)+ue(n)[∑CkLEQ(n)x3(n-k)]*e-jP(n)…方程(4-4)
根据这种操作,能够以较高的精度补偿在复数信号中的非线性失真。
另外,用于非线性失真均衡的复数信号转换器102的输出y(n)通过根升余弦滤波器103和用于线性失真均衡的复数信号转换器303。考虑到这种情况,能够以较高的精度补偿复数信号中的非线性失真。
在图28中示出在考虑到信号通过根升余弦滤波器103和用于线性失真均衡的复数信号转换器303的情况下用于非线性失真均衡的系数估计器431的结构。用于非线性失真均衡的系数估计器431的特征在于取消延迟元件321,并且在图25的用于非线性失真均衡的系数估计器402中的复数立方计算器121的后级提供根升余弦滤波器103和用于线性失真均衡的复数信号转换器303。该后级的LMS电路130和产生LMS电路130的另一个输入的相位旋转校正器211与图25中所示的相同。
在此描述这种结构的用于非线性失真均衡的系数估计器431的操作。当所检测的输出x(n)被输入到用于非线性失真均衡的系数估计器431时,复数立方计算器121把该信号x(n)转换为|x2(n)|x(n)并输出立方值x3(n)作为转换结果。根升余弦滤波器103对该转换结果执行频带限制,并且把z(n)=∑CkFIL|x2(n-k)|x(n-k)输出到用于线性失真均衡的复数信号转换器303。用于线性失真均衡的复数信号转换器303对该输出进行变换,并且把∑CiLEQ(n)z(n-i)输出到LMS电路130。在此,根升余弦滤波器103和用于线性失真均衡的复数信号转换器303的延迟量分别为M和N个符号。因此,延迟元件321被消除,并且在用于线性失真均衡的复数信号转换器303的输出中的延迟量总共被设置为(M+N)个符号。
另一方面,当输入相位旋转信号ejP(n)和误差信号e(n)时,相位旋转校正器211纠正在载波恢复电路111中执行的该相位旋转,从而把e(n)e-jP(n)输出到LMS电路130。LMS电路130使用这两个信号根据LMS算法更新用于第三阶失真均衡的系数a3(n),其被输出到用于非线性失真均衡的复数信号转换器102。在这种情况中,系数a3(n)在如下方程中表示:
a3(n+1)=a3(n)+ue(n)[∑CkLEQ(n)z(n-i)]*e-jP(n)…方程(4-5)
z(n)=∑CkFIL x3(n-k)…方程(4-6)
根据这种操作,能够以较高的精度补偿在复数信号中的非线性失真。
另外,图25的用于非线性失真均衡的系数估计器402、图26的用于非线性失真均衡的系数估计器411、图27的用于非线性失真均衡的系数估计器421以及图28的用于非线性失真均衡的系数估计器431可以被设置为在相位同步建立之后开始系数更新。在载波恢复电路111中的低通滤波器113按照与实施例1相同的方式监控在图23中的滤波器输出,并且当在该输出稳定的情况下建立相位同步时,把锁定信号设置为“H”。
图25的用于非线性失真均衡的系数估计器402、图26的用于非线性失真均衡的系数估计器411、图27的用于非线性失真均衡的系数估计器421以及图28的用于非线性失真均衡的系数估计器431按照实施例1的相同方式在锁定信号为“L”的情况下设置a3(n)=0。然后用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。在锁定信号为“H”的情况下,开始系数更新。根据上述操作,在复数信号中的非线性失真能够被补偿,而没有对载波恢复电路111的操作造成不良影响。
另外,图25的用于非线性失真均衡的系数估计器402、图26的用于非线性失真均衡的系数估计器411、图27的用于非线性失真均衡的系数估计器421以及图28的用于非线性失真均衡的系数估计器431可以被设置为在线性失真均衡收敛之后开始系数更新。按照与实施例3相同的方式,在系数稳定的情况下该线性失真均衡收敛,并且如图23中所示,该收敛信号被设置为“H”。如图23中所示,该收敛信号被输入到用于非线性失真均衡的系数估计器402。
在收敛信号为“L”,并且用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)的情况下,图25的用于非线性失真均衡的系数估计器402按照与实施例3相同的方式设置a3(n)=0。在收敛信号为“H”的情况下,步长参数控制器133把预定数值代替步长参数u,从而开始系数更新。图26的用于非线性失真均衡的系数估计器411、图27的用于非线性失真均衡的系数估计器421以及图28的用于非线性失真均衡的系数估计器431按照与上文所述相同的方式执行操作。根据这种操作,可以补偿复数信号中的非线性失真,而不会对线性失真均衡的收敛操作产生不良影响。
另外,图25的用于非线性失真均衡的系数估计器402、图26的用于非线性失真均衡的系数估计器411、图27的用于非线性失真均衡的系数估计器421以及图28的用于非线性失真均衡的系数估计器431可以被设置为仅仅在高C/N时执行系数更新。
按照与实施例1相同的方式,在图23的非线性失真均衡器401中提供一个C/N估计器116,使得该C/N估计器116计算和平均该C/N,并且把结果输出,作为CNR信号。图25的用于非线性失真均衡的系数估计器402、图26的用于非线性失真均衡的系数估计器411、图27的用于非线性失真均衡的系数估计器421以及图28的用于非线性失真均衡的系数估计器431在由CNR信号所示的C/N小于该设置阈值的情况下设置a3(n)=0。用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。在由CNR信号所示的C/N为该设置阈值或更大的情况下,执行系数更新。根据上述操作,当C/N为低时,可以补偿在复数信号中的非线性失真而没有负面影响。
在此,尽管在本实施例中仅仅把在非线性失真中显著的第三阶失真消除,如方程(1-1)和(2-1)所示。但是,可以按照实施例1相同的方式通过使用方程(1-11)补偿第二阶或更高阶的任何高阶的非线性失真。作为用于在这种情况下的系数更新方程,对于各个阶次形成方程(2-4)。另外,xm(n)=|xm-1(n)|x(n)。
在图29中示出用于非线性失真均衡的系数估计器441的结构,其补偿至少第二阶失真并且不大于第K阶失真的高阶非线性失真。在此,在该图中用于非线性失真均衡的复数信号转换器161与图9中所示实施例1的情况相同。如图29中所示,用于非线性失真均衡的系数估计器441的特征在于用延迟元件321代替图14的用于非线性失真均衡的系数估计器231中的每一阶的延迟元件129。用于非线性失真均衡的系数估计器441的操作与实施例2中的相同,只是当输入所检测输出x(n)时,每一阶的延迟元件321实现(M+N)个符号的延迟。另外,用于非线性失真均衡的复数信号转换器161具有与实施例1中所述相同的结构,并且输出如方程(1-11)中所示的y(n)。根据这种操作,可以补偿第二阶失真或更高级的任意高阶非线性失真。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过根升余弦滤波器103。考虑到这种情况,还可以按照以较高精度补偿在复数信号中的非线性失真的情况相同的方式补偿第二阶或更高阶的任意高阶非线性失真。这种情况中,每一阶的延迟元件321被延迟元件332所代替,并且根升余弦滤波器103被提供到复数第K次幂计算器163、复数平方计算器164和在用于非线性失真均衡的系数估计器441中的每一阶的复数第m次幂计算器的后级。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过用于线性失真均衡的复数信号转换器303。考虑到这种情况,还可以按照以较高精度补偿复数信号中的非线性失真情况中的相同方式补偿第二阶或更高阶的非线性失真。在这种情况中,每一阶的延迟元件321被延迟元件129所代替,并且用于线性失真均衡的复数信号转换器303被提供到复数第K次幂计算器163、复数平方计算器164以及用于非线性失真均衡的系数估计器441中的每一阶的复数第m次幂计算器。
用于非线性失真均衡的复数信号转换器161的输出y(n)通过根升余弦滤波器103和用于线性失真均衡的复数信号转换器303。考虑到这种情况,还可以按照以较高精度补偿复数信号中的非线性失真情况中的相同方式补偿第二阶或更高阶的高阶非线性失真。在这种情况中,每一阶的延迟元件321被取消,并且把根升余弦滤波器103和用于线性失真均衡的复数信号转换器303提供到163、复数平方计算器164以及用于非线性失真均衡的系数估计器441中的每一阶的复数第m次幂计算器。
在此,在上述例子中,示出一种情况,其中为每一阶提供一个延迟元件。但是,一个延迟元件可以被共享,从而把输出信号发布到复数第K次幂计算器163、复数平方计算器164以及每一阶的复数第m次幂计算器。
另外,在上述例子中,示出一种情况,其中分别提供复数第K次幂计算器163、复数平方计算器164和每一阶的复数第m次幂计算器。但是,例如可以通过把I和Q轴分量的次幂顺序输出到较高阶的下一个电路而实现电路的共享。另外,可以使用其它共享方法。
实施例5
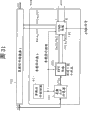
下面,将参照附图描述用于本发明的实施例5中的数据接收器的前端处理器。图30为示出在本实施例中用于数据接收器的前端处理器500的结构的方框图。形成用于数据接收器的前端处理器500包括一个准同步检测器108和非线性失真均衡器501。该非线性失真均衡器501具有用于非线性失真均衡的复数信号转换器102、FFT电路502、同步检测解调器503、误差估计器104以及用于非线性失真均衡的系数估计器506。同步检测解调器503由一个信道特性估计器(CHCHARACT EST)504以及一个复数除法器505所形成。
准同步检测器108按照与实施例1相同的方式检测I轴和Q轴数据,以便于当由天线接收执行同步载波调制的OFDM调制信号时产生所检测的输出x(n)。
非线性失真均衡器501的操作在下文中描述。用于非线性失真均衡的复数信号转换器102使用在用于非线性失真均衡的系数估计器506中产生的用于第三阶失真均衡的系数a3(n),以便于消除包含在信号x(n)中的第三阶失真。FFT电路502执行FFT变换以便于把频率轴上的信号f(n)输出到同步检测解调器503。如图30中所示,FFT电路502执行L点的FFT变换,其中处理延迟量为2L个样本。在此,在上述实施例1至4中,在由n表示的时间上的每个点被称为一个符号。为了从收集IFFT变换的L个点的OFDM符号中识别时间上的每个点,在时间上的每个点在本实施例和下文中被称为一个样本。
在同步检测解调器503中,信道特性估计器504通过使用包含在信号f(n)中的导频信号等等计算发送路径特征H(k)。复数除法器505执行复数除法,用信号f(n)除以发送路径特征H(k),从而执行同步解调,以便于把信号q(n)输出到误差估计器104。误差估计器104计算信号q(n)与最接近的映射点d(n)之间的误差,并且把d(n)输出到未示出的误差纠正部分,作为一个解调信号。在此,在该误差纠正部分执行软判定解码(soft decision decoding)时,该非线性失真均衡器501输出该误差估计器104的输入q(n)作为一个解调信号。用于非线性失真均衡的系数估计器506使用该误差信号e(n)以及信号x(n),从而根据LMS算法更新系数a3(n)。
在图31中示出用于非线性失真均衡的系数估计器506的结构。用于非线性失真均衡的系数估计器506具有一个复数立方计算器121、FFT电路502和LMS电路130。
当受到准同步检测的信号x(n)被输入到用于非线性失真均衡的系数估计器506时,复数立方计算器121把该信号x(n)转换为|x2(n)|x(n),并且输出转换结果作为立方值x3(n)。FFT电路502执行该立方值x3(n)的FFT变换,并且把该信号,即在频率轴上的转换值X3 g(k),输出到LMS电路130。该LMS电路130按照与实施例1中相同的方式使用转换值X3 g(k)和误差信号e(n)作为输入而执行系数更新。从而把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的复数信号转换器102。
在此,当假设图30的同步检测解调器503和误差估计器104没有延迟时,在从信号y(n)计算误差信号e(n)时的延迟量变为FFT电路502的2L个样本。在用于非线性失真均衡的系数估计器506中的延迟量与FFT电路502的2L个样本相匹配,并且处理延迟变为相等。根据上述操作,可以补偿已经受到同步载波调制的OFDM基带信号中的非线性失真。
现在描述根据本实施例的用于非线性失真均衡的系数估计器506的系数更新算法。从图30中,误差信号e(n)被表示为如下:
e(n)=d(n)-q(n)…方程(5-1)
其中,
q(n)=f(n)/H(k)…方程(5-2)
f(n)=FFT(y(n))…方程(5-3).
这些方程(5-2)和(5-3)被代入方程(5-1),从而获得如下方程:
e(n)=d(n)-FFT(y(n))/H(k)…方程(5-4)
在此,FFT(y(n))表示y(n)的FFT变换。方程(1-1)被代入方程(5-4),从而获得如下方程:
e(n)=d(n)-FFT(x(n)+a3(n)x3(n))/H(k)…方程(5-5)
由于LMS算法的系数更新收敛速度相对较慢,因此系数a3(n)被认为是一个常量,从而获得如下方程:
e(n)=d(n)-FFT(x(n))/H(k)+a3(n)·FFT(x3(n))/H(k)…方程(5-6)
在此,方程(5-6)被代入(5-1),并且执行偏微分,从而获得如下方程:
dJ(a3)/da3(n)=2[e(n)·de(n)/da3(n)]
=-2e(n)[FFT(x3(n))/H(k)]*…方程(5-7)
在此,u=2α并且方程(5-7)被代入方程(1-6),从而获得如下方程:
a3(n+1)=a3(n)+ue(n)[FFT(x3(n))/H(k)]*…方程(5-8)
而系数a3(n)被在图31中的如下方程中表示:
a3(n)=a3(n-1)+ue(n)[FFT(|x2(n)|x(n))/H(k)]*…方程(5-9)
在方程(5-9)中,尽管与e(n)、x(n)和H(k)相比,a3(n)被延迟一个符号,LMS算法在系数更新的收敛速度上相对较慢,因此该延迟实际上不造成障碍。
在此,在如下方程中,对于函数F(xi)的参数i从i=A到i=B的函数F(xi)的累加值∑F(xi)被表示为“∑i=A to B F(xi)”,在指数函数中圆周率π被表示为“pie”。
在此,在接收频带中,传输路径特征被认为接近于常数,也就是说,H(k)=1,方程(5-8)在如下方程中表示:
a3(n+1)=a3(n)+ue(n)[FFT(x3(n))]*…方程(5-10)
上述结构和非线性失真均衡器的操作是基于方程(5-10)的。
当FFT电路502在满足方程(5-11)的时间n=T开始工作并且在该时间段中x3(n)的FFT变换结果被表示为x3 g(k)时,该变换值x3 g(k)在方程(5-12)中表示。
T+gL≤n≤T+(g+1)L-1(g=0,1,...)…方程(5-11)
X3 g(k)=∑j=(T+gL)to(T+(g+1)L-1)x3(j)WL k(j-T-gL),
WL=e-j2pie/L(k=0,1,…,L-1)…方程(5-12)
当FFT(x3(n))被表示为x3 g(k)并且k=n-T-gL被分别代入方程(5-8)和(5-10)时,获得方程(5-13)和(5-14)。
a3(n+1)=a3(n)+ue(n)[X3 g(n-T-gL)]* …方程(5-13)
a3(n+1)=a3(n)+ue(n)[X3 g(n-T-gL)/H(n-T-gL)]* …方程(5-14)
在此描述FFT电路502的操作。作为一个例子,考虑FFT的点数L=4的情况。为了简化,把T=0和g=0分别代入方程(5-11)和(5-12),从而获得方程(5-15)和(5-16):
0≤n≤3…方程(5-15)
X3 0(k)=∑j=0to3x3(j)W4 kj,W4=e-j2pie/4…方程(5-16)
在图32中示出实现方程(5-16)的蝴蝶运算电路(BUTT OPECIR)521。图32的蝴蝶运算电路521具有8个复数加法器(COMPADD)522和5个旋转算子(ROT OP)523。
图33中示出FFT电路的结构。该FFT电路502具有S/P(串并)转换器531、蝴蝶运算电路521和P/S(并串)转换器532。图34中示出FFT电路502的操作情况。图34的水平轴为时间n。S/P转换器531对每4个样本执行一个S/P转换,从而输出并行数据。蝴蝶运算电路521执行上述并行电路的蝴蝶运算。P/S转换器532重新排列该蝴蝶运算结果,并且执行P/S转换,从而输出FFT转换的结果。在图34的例子中,处理延迟为8个(=2L)样本。在此,图34示出立方值x3(n)的FFT转换,以及按照相同的方式示出y(n)的FFT转换。
在非线性失真均衡器501中的FFT电路502的输出f(n)通过同步检测解调器503。考虑到这种情况,根据方程(5-8)能够以较高的精度补偿受到同步载波调制的OFDM基带信号中的非线性失真。
在图35中示出在这种情况中的用于非线性失真均衡的系数估计器541的结构。用于非线性失真均衡的系数估计器541是通过在图31的用于非线性失真均衡的系数估计器506中LMS电路130的前级提供复数除法器505而获得的。通过使用复数除法器505执行复数除法,把FFT电路502的转换值X3 g(k)除以传输路径特性H(k),并且把X3 g(k)/H(k)输出到LMS电路130。除了上文所述之外,用于非线性失真均衡的系数估计器541的操作与图31的用于非线性失真均衡的系数估计器506的操作相同。
根据上述操作,可以根据方程(5-8)用较高的精度补偿已经受到同步载波调制的OFDM基带信号中的非线性失真。另外,例如每两个点中的一个点可以用作为一个代表值,而剩余的一个点被作为一个代表值插入在图33的用于非线性失真均衡的系数估计器506中的FFT电路502的输出中。作为一个例子,考虑一种情况,其中FFT的点数为4个。在方程(5-16)中,k=0,2被用作为一个代表值,而P/S转换器532对于剩余的k=1,3执行插值,如下述方程中所示:
X3 0(1)=X3 0(0),X3 0(3)=X3 0(2)…方程(5-17)
在这种情况中,图32的蝴蝶运算电路521可以仅仅使用由虚线所包围的部分来实现,并且电路规模可以被设置为大约1/2。另外,例如从图31的用于非线性失真均衡的系数估计器506以及图35的用于非线性失真均衡的系数估计器541中的FFT电路502的输入中每两个点中的一个点被使用,从而执行1/2点数的FFT变化,其结果被用作为一个代表值。然后,剩余的一个点可以被作为一个代表值而插入。作为一个例子,考虑一种情况,其中为了减化代入T=0以及g=0,FFT的点数L=4。当使用n=0,2执行两个点的FFT变换,获得如下方程:
X3 0(2(p-1))’=∑s=1 to 2x3(2(s-1))W2 (p-1)(s-1),W2=e-j2pie/2(p=1,2)…方程(5-18)
在方程(5-18)中,当k=0,2时获得的数值假设为在根据如下方程对乘余的k=1,3执行差值时的代表值。
X3 0(1)’=X3 0(0)’,X3 0(3)’=X3 0(2)’…方程(5-19)
在图36中示出执行方程(5-18)和(5-19)的蝴蝶运算电路551的结构。蝴蝶运算电路551具有两个辅助加法器522和一个旋转算子523。这种情况中,图36的蝴蝶运算电路551的电路规模可以制成大约为图32的蝴蝶运算电路521的1/4。
在这种情况中的FFT电路561的结构在图37中示出。FFT电路561具有S/P转换器562、蝴蝶运算电路551和P/S转换器563。FFT电路561的操作情况在图38中示出。水平轴表示时间n。S/P转换器562对每4个样本执行S/P转换,以从4个样本中输出第一和第三个数据块。蝴蝶运算电路551执行并行数据的蝴蝶运算。P/S转换器563执行蝴蝶运算结果的P/S转换,并且执行方程(5-19)中的插值处理,从而输出FFT转换的结果。图38的例子中,处理延迟为8个(=2L)样本。
另外,可以取消在图31中的用于非线性失真均衡的系数估计器506中的FFT电路502,从而对图30中的非线性失真均衡器501的FFT电路502进行时分复用。
在这种情况中,用于数据接收器的前端处理器的结构在图39中示出。非线性失真均衡器571被FFT电路572和图30中的非线性失真均衡器501的用于非线性失真均衡的系数估计器573所代替。
另外,在图40中示出用于非线性失真均衡的系数估计器573。用于非线性失真均衡的系数估计器573是通过取消在图31中用于非线性失真均衡的系数估计器506的FFT电路502而获得的。
现在描述非线性失真均衡器571的操作。用于非线性失真均衡的系数估计器573的复数立方计算器121把信号x(n)转换为立方值x3(n)并且把该转换结果输出到FFT电路572。FFT电路572对信号y(n)和立方值x3(n)执行时分复用,从而分别执行FFT变换,并且把信号f(n)输出到同步检测解调器503,以及把转换的数值x3 g(k)输出到用于非线性失真均衡的系数估计器573。该转换的数值x3 g(k)和误差信号e(n)被输入到用于非线性失真均衡的系数估计器573的LMS电路130,其按照实施例1的方式执行系数更新。然后,该LMS电路130把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的复数信号转换器102。该操作的其它部分与图30的非线性失真均衡器501相同。
图41中示出FFT电路572的结构。该FFT电路572具有S/P转换器581、582、蝴蝶运算电路521、P/S转换器583、584以及选择器585。FFT电路572的操作情况在图42至45中示出。水平轴表示时间n。作为一个例子,考虑FFT的点数L=4的情况。如图42和43中所示,S/P转换器581和582对每4个样本执行S/P转换,从而输出并行数据。在此,与S/P转换器581相比,S/P转换器582把该输出延迟(1/2)个OFDM符号,也就是说,延迟两个符号。
如图44中所示,选择器585选择被输出到蝴蝶运算电路521的S/P转换器581和582的输出。蝴蝶运算电路521根据比图34中所示情况快两倍的时钟,执行并行数据的蝴蝶运算。如图45中所示,P/S转换器583和584分别重新排列蝴蝶运算结果f(n)和X3 g(k),并且执行P/S转换,从而把FFT转换的结果输出。在此,P/S转换器在蝴蝶运算完成之后把输出延迟(1/2)个OFDM符号,也就是说,延迟两个符号。在图42至45的例子中,处理延迟为8(=2L)个样本。根据上述运算,在一个FFT电路上执行时分复用,从而可以用较小的电路规模补偿受到同步载波调制的OFDM基带信号中的非线性失真。
另外,在图39中的非线性失真均衡器571中的FFT电路572的输出f(n)通过同步检测解调器503。考虑到这种情况,根据方程(5-8),可以用较高的精度补偿受到同步载波调制的OFDM基带信号中的非线性失真。
在图46中示出在这种情况中用于非线性失真均衡的系数估计器591的结构。用于非线性失真均衡的系数估计器591是通过把复数除法器505提供到图40的用于非线性失真均衡的系数估计器573中的LMS电路130的前级而获得的。用于非线性失真均衡的系数估计器591通过使用复数除法器505执行复数除法,用FFT电路572的转换数值X3 g(k)除以传输路径特性H(k)。除此之外的其它操作部分与图40的用于非线性失真均衡的系数估计器573相同。根据上述操作,在一个FFT电路上执行时分复用,从而可以使用根据方程(5-8)的较小电路规模以较高的精度补偿受到同步载波调制的OFDM基带信号中的非线性失真。
另外,通过把对在非线性失真均衡器501中的同步检测解调器503产生的传输路径特性H(k)执行的时分复用应用到FFT电路502,可以计算延迟概况h’(n)。
延迟概况示出与所需波形的电功率相关的延迟波形的电功率的延迟时间。通常,在OFDM中考虑到由于多路径干扰所造成的延迟时间,从而传输符号的长度被延长设置的保护间隔(guard interval)。在接收器方,存在干扰的保护间隔的数据被忽略,并且把一个滑窗置于所接收信号上,从而切除其上的一部分,用作为有效符号。仅仅把FFT应用到该有效符号上。通过使用这种延迟概况,可以精确地确定与所需波形的电功率相关的延迟波形的电功率的延迟时间。因此,确定用于防止来自相临符号的干扰的有效符号中的时间位置。因此,可以显著地增加消除延迟波形的影响的能力。
图47中示出在用于数据接收器的前端处理器600的结构。在图47中,用图30的非线性失真均衡器501中的FFT电路572代替非线性失真均衡器601。
非线性失真均衡器601的操作在下文描述。FFT电路572对信号y(n)和传输路径特征H(x)执行时分复用,从而分别执行FFT转换。然后,FFT电路572把信号f(n)输出到同步检测解调器503,从而输出延迟概况h’(n)。该操作的其它部分与图30的非线性失真均衡器501相同。
下面描述延迟概况的计算方法。作为一个例子,考虑一种情况,其中为了简化代入T=0的FFT的点数L=4,以及g=0。延迟概况h(n)在下列方程中给出作为H(k)的IFFT变换。
h(n)=(1/4)∑k=0 to 3 H(k)W4 -kn,W4=e-j2pie/4(n=0,1,2,3)…方程(5-20)
而H(k)的FFT变换h’(n)在下列方程中给出:
h’(n)=∑k=0to3H(k)W4 kn
W4=e-j2pie/4(n=0,1,2,3)…方程(5-21)
在方程(5-20)中,n(n=1,2,3)被4-n所代替而得出如下方程:
h’(4-n)=∑k=0 to 3 H(k)W4 k(4-n)=∑k=0 to 3 H(k)W4 -kn(W4 4)k=∑k-0 to 3H(k)W4 -kn=4h(n)…方程(5-22)
在该方程中,n=3,2,1被代入方程(5-22),从而获得如下方程:
h’(1)=4h(3),h’(2)=4h(2),h’(3)=4h(1)…方程(5-23)
另外,从方程(5-20)和方程(5-21)获得如下方程:
h’(0)=4h(0)…方程(5-24)
图48和49示出上述情况。如图48中所示,当对作为频率轴信号的传输路径特征H(k)执行IFFT变换时,计算作为时间轴信号的延迟概况h(n)。如图49中所示,当作为频率轴信号的传输路径特征H(k)假设被进行FFT变换时,计算延迟概况h’(n)。当在方程(5-23)和方程(5-24)中忽略4倍的系数时,该延迟概况h’(n)变为作为在范围n≥1内的时间轴信号的延迟概况h(n)的逆序。尽管该延迟概况h’(n)与方程(5-20)的定义不同,当识别上述关系时,它也可以用作为一个延迟概况,因此不会造成特别的障碍。根据上述操作,补偿受到同步载波调制的OFDM基带信号中的非线性失真,并且可以计算延迟概况而不增加新的电路。
另外,对在图30中的非线性失真均衡器501中的同步检测解调器503产生的传输路径特性H(k)执行的时分复用被应用到用于非线性失真均衡的系数估计器506中的FFT电路,从而可以计算延迟概况h’(n)。
这种情况上用于数据接收器的前端处理器610的结构在图50中示出。在图50中,非线性失真均衡器611被图30的非线性失真均衡器501中的用于非线性失真均衡的系数估计器612所代替。
图51中示出用于非线性失真均衡的系数估计器612的结构。用于非线性失真均衡的系数估计器612是通过用图31的用于非线性失真均衡的系数估计器506中的FFT电路572代替FFT电路502而获得的。FFT电路572对复数立方计算器121的转换值x3(n)和传输路径特性H(k)执行时分复用,从而对它们分别执行FFT变换。然后,FFT电路572把该转换值x3 g(n)输出到LMS电路130,并且还输出延迟概况h’(n)。用于非线性失真均衡的系数估计器612的操作除了上述部分之外与图31的用于非线性失真均衡的系数估计器506中的相同。
另外,非线性失真均衡器611的操作除了上述部分之外与图30的用于非线性失真均衡的非线性失真均衡器601的相同。根据上述操作,补偿受到同步载波调制的OFDM基带信号中的非线性失真,并且可以计算延迟概况而不增加新电路。
另外,图50的非线性失真均衡器611中的FFT电路502的输出f(n)通过同步检测解调器503。考虑到这种情况,根据方程(5-8),能够以较高的精度补偿在受到同步载波调制的OFDM基带信号中的非线性失真。
图52中示出在这种情况中用于非线性失真均衡的系数估计器621的结构。用于非线性失真均衡的系数估计器621是通过在图51的用于非线性失真均衡的系数估计器612中的LMS电路130的前级提供一个复数除法器505而获得的。用于非线性失真均衡的系数估计器612通过使用复数除法器505执行复数除法,用FFT电路572的转换值X3 g(k)除以传输路径特性H(k),并且把X3 g(k)/H(k)输出到LMS电路130。用于非线性失真均衡的系数估计器612除了上述之外与图51的用于非线性失真均衡的系数估计器612相同。
根据上述操作,根据方程(5-8)用较高的精度补偿受到同步载波调制的OFDM基带信号中的非线性失真,并且可以计算延迟概况而不增加新电路。
另外,图31的用于非线性失真均衡的系数估计器506、图35的用于非线性失真均衡的系数估计器573、图46的用于非线性失真均衡的系数估计器591、图51的用于非线性失真均衡的系数估计器612以及图52的用于非线性失真均衡的系数估计器621给以仅仅对两个OFDN符号中的一个OFDN符号执行系数更新。
图31的用于非线性失真均衡的系数估计器506具有一个系数估计控制器511。系数估计控制器511输出一个系数更新控制信号(COEFEST CON),其中对于每两个OFDM符号,仅仅有一个OFDM符号变为“H”。复数立方计算器121、FFT电路502和LMS电路130分别在该系数更新控制信号为“L”的时间段中停止工作。
图35的用于非线性失真均衡的系数估计器541、图40的用于非线性失真均衡的系数估计器573、图46的用于非线性失真均衡的系数估计器591、图51的用于非线性失真均衡的系数估计器612和图52的用于非线性失真均衡的系数估计器621按照相同的方式被提供有一个系数估计控制器511。在系数更新控制信号为“L”的时间段中,在用于非线性失真均衡的系数估计器中的每个电路停止工作。根据上述操作,尽管用于第三阶失真均衡的系数的收敛时间段变得略长,但是用于非线性失真均衡的系数估计器的功耗被减小为大约1/2。
另外,在图50的非线性失真均衡器611中的用于非线性失真均衡的系数估计器612可以仅仅对每两个OFDM符号中的一个OFDM符号执行系数更新,从而计算在OFDM符号不被系数更新的时间段中的延迟概况h’(n)。
图53示出这种情况下的用于非线性失真均衡的系数估计器631的结构。用于非线性失真均衡的系数估计器631是通过用FFT电路502取代FFT电路572,并且通过把选择器632提供到图51的用于非线性失真均衡的系数估计器612中的FFT电路502的前级而获得。
系数估计控制器511输出系数更新控制信号,其中对于每两个OFDM符号仅仅有一个OFDM符号变为“H”。复数立方计算器121和LMS电路130在该系数更新控制信号为“L”的时间段中停止工作。另外,选择器632在系数更新控制信号为“H”的时间段中选择复数立方计算器121的立方值x3(n),并且在该信号为“L”的时间段中选择传输路径特性H(k),其被输出到FFT电路502。FFT电路502对所选择的信号执行FFT变换,其被输出到LMS电路130以及外部电路。FFT电路502对于每个OFDM符号交替输出转换的数值X3 g(k)和延迟概况h’(n)。但是,LMS电路130在延迟概况h’(n)被输出的OFDM符号的过程中停止工作。另外,仅仅输出延迟概况h’(n)的OFDM符号允许到外部电路的输出为有效。
根据上述操作,在受到同步载波调制的OFDM基带信号中的非线性失真被补偿,并且仅仅通过添加一个选择器而不增加功耗即可计算延迟概况。
另外,在图50的非线性失真均衡器611中的FFT电路502中的输出f(n)通过同步检测解调器503。考虑到这种情况,可以根据方程(5-8)用较高的精度补偿受到同步载波调制的OFDM基带信号中的非线性失真。
在图54中示出在这种情况下的用于非线性失真均衡的系数估计器641的结构。用于非线性失真均衡的系数估计器641是通过在图53的用于非线性失真均衡的系数估计器631的LMS电路130的前级提供一个复数除法器505而获得的。用于非线性失真均衡的系数估计器641通过使用复数除法器505执行复数除法,把FFT电路502的转换值X3 g(k)除以传输路径特性H(k),并且把X3 g(k)/H(k)输出到LMS电路130。除了上文所述之外,用于非线性失真均衡的系数估计器641的操作与图53的用于非线性失真均衡的系数估计器631的操作相同。
根据上述操作,可以根据方程(5-8)用较高的精度补偿已经受到同步载波调制的OFDM基带信号中的非线性失真,并且仅仅通过添加一个选择器而不增加功耗即可计算延迟概况。
另外,在图39的非线性失真均衡器571中用于非线性失真均衡的系数估计器573例如仅仅对每两个OFDM符号中的一个OFDM符号执行系数更新。然后,在OFDM符号不受到系数更新的时间段中计算延迟概况h’(n)的情况中,可以把时分复用应用到非线性失真均衡器571中的非线性失真均衡器571。
图55示出这种情况下的用于数据接收器的前端处理器650的结构。在图15中,非线性失真均衡器651是通过把一个选择器632添加到图39的非线性失真均衡器571而获得的。
现在描述非线性失真均衡器655的操作。用于非线性失真均衡的系数估计器573仅仅通过在系数估计控制器中产生的系数更新控制信号对每两个OFDM符号中的一个OFDM符号执行操作。然后,复数立方计算器121把该信号x(n)转换为立方值x3(n)并且把转换结果输出到选择器632。选择器632在系数更新控制信号为“H”的时间段中选择立方值x3(n),并且在该信号为“L”的时间段中选择传输路径特性H(k),并且输出到FFT电路572。
FFT电路572对信号y(n)和选择器632的输出进行时分复用,并且分别对它们执行FFT变化。然后,FFT电路572把信号f(n)输出到同步检测解调器503,并且把选择器632的FFT变换数值输出到用于非线性失真均衡的系数估计器573以及输出到外部电路。FFT电路572每隔一个OFDM符号交替输出转换值X3 g(k)和延迟概况h’(n)。但是,用于非线性失真均衡的系数估计器573在延迟概况h’(n)被输出的OFDM符号的过程中停止工作。另外,仅仅输出延迟概况h’(n)的OFDM符号允许到外部电路的输出为有效。其它部分的操作与图39的非线性失真均衡器571的操作相同。
根据上述操作,通过采用时分复用,仅仅有一个FFT电路工作,并且可以利用较小的电路规模补偿在受到同步载波调制的OFDM基带信号中的非线性失真。另外,仅仅通过添加一个选择器而不增加功耗即可计算延迟概况。
另外,在图55的非线性失真均衡器651中,FFT电路572的输出f(n)通过同步检测解调器503。考虑到这种情况,可以根据方程(5-8)用较高的精度补偿受到同步载波调制的OFDM基带信号中的非线性失真。
在图56中示出在这种情况下的用于数据接收器的前端处理器660的结构。非线性失真均衡器661是通过在图55的非线性失真均衡器651中的用于非线性失真均衡的系数估计器591代替用于非线性失真均衡的系数估计器573而获得的。非线性失真均衡器661通过使用用于非线性失真均衡的系数估计器591的复数除法器505执行复数除法,把FFT电路572的转换值X3 g(k)除以传输路径特性H(k)。然后,复数除法器505把该除法结果X3 g(k)/H(k)输出到LMS电路130。除了上文所述之外,非线性失真均衡器661的操作与图55的非线性失真均衡器651的操作相同。
根据上述操作,通过采用时分复用,仅仅一个FFT电路工作,并且可以根据方程(5-8)用较小的电路规模补偿已经受到同步载波调制的OFDM基带信号中的非线性失真。然后,仅仅通过添加一个选择器而不增加功耗即可计算延迟概况。
另外,图31的用于非线性失真均衡的系数估计器506、图35的用于非线性失真均衡的系数估计器541、图40的用于非线性失真均衡的系数估计器573、图46的用于非线性失真均衡的系数估计器591、图51的用于非线性失真均衡的系数估计器612、图52的用于非线性失真均衡的系数估计器621、图53的用于非线性失真均衡的系数估计器631、以及图54的用于非线性失真均衡的系数估计器641可以仅仅在高C/N时执行系数更新。
按照与实施例1中相同的方式,把一个C/N估计器提供到图30的非线性失真均衡器501中、图39的非线性失真均衡器571中、图47的非线性失真均衡器601中、图50的非线性失真均衡器611中、图55的非线性失真均衡器651中、以及图56的非线性失真均衡器661中。C/N估计器116计算和平均C/N,并且输出其结果作为一个CNR信号。在由CNR信号所示的C/N小于设置阈值的情况下,用于非线性失真均衡的的系数估计器设置a3(n)=0,并且用于非线性失真均衡的复数信号转换器102按照与实施例1相同方式输出y(n)=x(n)。在由CNR信号所示的C/N为设置的阈值或更大的情况下,执行系数更新。根据上述操作,可以补偿在OFDM基带信号中的非线性失真,而没有在低C/N的时候造成负面影响。
在此,尽管在本实施例中,消除了如方程(1-1)中所示作为主要第三阶失真的非线性失真,但是通过使用方程(1-11)可以消除第二阶失真或更高阶的任意高阶非线性失真。在这种情况中,当假设在各个阶次中H(k)=1时获得作为如下方程的系数更新方程:
am(n+1)=am(n)+ue(n)[FFT(xm(n))]*(m>1)…方程(5-25)
通过考虑到信号f(n)通过同步检测解调器503,可以获得下一个方程。
am(n+1)=am(n)+ue(n)[FFT(xm(n))/H(k)]*(m>1)…方程(5-26)
在此,形成xm(n)=|xm-1(n)|x(n)。
图57示出用于非线性失真均衡的系数估计器671的结构图,其通过利用方程(5-25)补偿在图30的非线性失真均衡器501以及图47的非线性失真均衡器601中的至少第二阶失真并且不大于第K阶失真的高阶非线性失真。用于非线性失真均衡的系数估计器671具有复数第K次幂计算器163、复数平方计算器164、对应于阶数的多个FFT电路502以及对应于阶数的多个LMS电路130。用于非线性失真均衡的复数信号转换器161与图9中所示的相同。
当执行准同步检测的信号x(n)被输入到用于非线性失真均衡的系数估计器671时,复数第K次幂计算器163产生|xK-1(n)|x(n),即xK(n),而复数平方计算器164产生|x(n)|x(n),即x2(n)。每一阶的FFT电路502分别对第K次幂数值xK(n)以及x2(n)执行FFT转换,从而把在频率轴上的转换值XK g(k)和X2 g(k)输入到每一阶的LMS电路130。每一阶的LMS电路130使用该转换值XK g(k)和X2 g(k)以及误差信号e(n)执行系数更新。然后,LMS电路130把用于第K阶失真均衡的系数aK(n)以及用于第二阶失真均衡的系数a2(n)输出到用于非线性失真均衡的复数信号转换器161。
按照用于其它阶的相同方式,第m次幂计算器产生|xm-1(n)|x(n),作为第m次幂数值xm(n)。然后,LMS电路130使用复数第m次幂数值xm(n)以及误差信号e(n)的输出值,执行系数更新,并且把用于第m阶失真均衡的系数am(n)输出到用于非线性失真均衡的复数信号转换器161。另外,用于非线性失真均衡的复数信号转换器161具有与实施例1相同的结构,并且输出方程(1-11)中所示的y(n)。根据上述操作,可以补偿第二阶失真或更高阶的任意高阶非线性失真。
另外,在图30的非线性失真均衡器501中和图47的非线性失真均衡器601中用于非线性失真均衡的系数估计器506被图35的用于非线性失真均衡的系数估计器541所代替的情况下,可以用相同的方式补偿第二阶失真或更高阶的任意高阶非线性失真。这种情况中,与系数更新方程相同,方程(5-26)被用于各个阶次。
图58中示出在这种情况中用于非线性失真均衡的系数估计器681的结构。该电路是通过分别把复数除法器505添加到用于非线性失真均衡的系数估计器671中用于各个阶次的LMS电路130的前级而获得的。
另外,按照相同的方式,可以在图39的非线性失真均衡器571和图55的非线性失真均衡器651中补偿第二阶失真或更高阶的任意高阶非线性失真。这种情况中,与系数更新方程相同,方程(5-25)被用于各个阶次。
图59中示出在这种情况中用于非线性失真均衡的系数估计器691的结构。用于非线性失真均衡的系数估计器691具有复数第K次幂计算器163、复数平方计算器164和对应于阶数的多个LMS电路130。另外,在图39或图55中的FFT电路572被FFT电路692所代替,而用于非线性失真均衡的复数信号转换器161与图9中所示的相同。
下面描述用于非线性失真均衡的系数估计器691的操作。复数第K次幂计算器163和复数平方计算器164分别把第K次幂数值xK(n)和平方值x2(n)输出到外部FFT电路692。FFT电路692对信号y(n)、第K次幂数值xK(n)和平方值x2(n)执行时分复用,从而分别对它们执行FFT变换。然后,FFT电路692把信号f(n)输出到同步检测解调器503,并且把转换数值XK g(k)和X2 g(k)分别输出到每一阶LMS电路130。每一阶的LMS电路130使用该转换数值XK g(k)和X2 g(k)以及误差信号e(n),从而执行系数更新,并且把用于第K阶失真均衡的系数aK(n)以及用于第二阶失真均衡的系数a2(n)输出到用于非线性失真均衡的复数信号转换器161.另外,用于非线性失真均衡的复数信号转换器161具有与实施例1中相同的结构,并且输出方程(1-11)中所示的信号y(n)。
图60中示出FFT电路692的结构。FFT电路692具有S/P转换器701、702和703、蝴蝶运算电路521、P/S转换器704、705和706以及选择器707。
在图61至65中示出FFT电路692的操作情况。水平轴表示时间n。例如,假设FFT的点数为L=4的情况。如图61和62中所示,S/P转换器701、702和703通过对每4个样本执行S/P转换而输出并行数据。在此,S/P转换器702和703把该输出相对于S/P转换器701分别延迟一个样本和两个样本。如图63中所示,选择器707选择被输出到蝴蝶运算电路521的S/P转换器701、702和703的输出。
如图63中所示,蝴蝶运算电路521根据比图34中的时钟快4倍的时钟执行并行数据的蝴蝶运算。如图64中所示,P/S转换器704、705和706分别重新排列该蝴蝶运算结果f(n)、X2 g(k)和XK g(k),从而执行P/S转换并且输出FFT转换的结果。在此,P/S转换器705和706在完成蝴蝶运算之后分别把该输出延迟两个样本和一个样本。在图61至64的例子中,处理延迟为8(=2L)个样本。
根据上述操作,对一个FFT电路执行时分复用,从而可以使用较小的电路规模补偿第二阶失真或更高阶的任意高阶非线性失真。在补偿其它阶的非线性失真的情况中,增加该阶次m的复数第n次幂计算器以及LMS电路130,并且如果需要的话可以增加FFT电路792的复用程度。
另外,在图39的非线性失真均衡器571中以及图55的非线性失真均衡器651中用于非线性失真均衡的系数估计器573被图49的用于非线性失真均衡的非线性失真均衡器651所代替的情况中,可以用相同的方式补偿第二阶失真或更高阶的任意高阶非线性失真。方程(5-26)被用于该各个阶次中作为这种情况下的系数更新方程。
在图65中示出用于非线性失真均衡的系数估计器711的结构。该电路是通过把一个复数除法器505分别提供到在图59的用于非线性失真均衡的系数估计器691每一阶的LMS电路130的前级而获得的。
另外,可以采用在图50的非线性失真均衡器611中的相同方式补偿第二阶失真或更高阶的任意高阶非线性失真。方程(5-25)在各个阶次中被用作为这种情况下的系数更新方程。在图66中示出在这种情况下用于非线性失真均衡的系数估计器721的结构。用于非线性失真均衡的系数估计器721具有复数第K次幂计算器163、复数平方计算器164、FFT电路692以及对应于阶数的多个LMS电路130。另外,用于非线性失真均衡的复数信号转换器161与图9中所示的相同。
用于非线性失真均衡的系数估计器721在下文中描述。复数第K次幂计算器163和复数平方计算器164分别把第K次幂数值xK(n)和平方值x2(n)输出到FFT电路692。FFT电路692对该K次幂数值xK(n)、平方值x2(n)以及传输特性H(k)执行时分复用,从而执行各自的FFT变换,并且把变换数值XK g(k)和X2 g(k)输出到各个阶次的LMS电路130,同时输出延迟概况h’(n)。每一阶的LMS电路130使用转换的数值以及误差信号e(n)来执行系数更新,并且把用于第K阶失真均衡的系数aK(n)和用于第二阶失真均衡的系数a2(n)输出到用于非线性失真均衡的复数信号转换器161。
另外,用于非线性失真均衡的复数信号转换器161具有与实施例1中所述相同的结构,并且输出方程(1-11)中所示的信号y(n)。根据上述操作,可以补偿第二阶失真或更高阶的任意高阶非线性失真并且可以计算延迟概况,而不增加新电路。在补偿其它阶的非线性失真的情况中,添加第m阶的复数第m次幂计算器以及LMS电路130并且如果需要的话可以增加FFT电路692的复用程度。
另外,在图50中的非线性失真均衡器611中用于非线性失真均衡的系数估计器612被图52的用于非线性失真均衡的系数估计器621所代替的情况下,可以按照相同的方式补偿第二阶失真或更高阶的任意高阶非线性失真。在各个阶次中使用方程(5-26)作为这种情况的系数更新方程。图67中所示用于非线性失真均衡的系数估计器731是通过分别把一个复数除法器505提供到图66的用于非线性失真均衡的系数估计器721中的每一阶的LMS电路130的前级而获得的。
另外,在图50中非线性失真均衡器611中的用于非线性失真均衡的系数估计器612被图53的用于非线性失真均衡的系数估计器631所代替的情况下,可以按照相同的方式补偿第二阶失真或更高阶的任意高阶非线性失真。方程(5-25)被用于各个阶次中作为本情况的系数更新方程。
图68中示出这种情况中用于非线性失真均衡的系数估计器741。用于非线性失真均衡的系数估计器741具有复数第K次幂计算器163、复数平方计算器164、选择器742、FFT电路502和对应于阶数的多个LMS电路130。另外,用于非线性失真均衡的复数信号转换器161与图9中所示的相同。
现在描述用于非线性失真均衡的系数估计器741的操作。系数估计控制器511输出系数更新控制信号,例如在四个OFDM符号周期的每个部分中,该系数更新控制信号分别对于第一OFDM符号变为“1”,对于第三OFDM符号变为“2”,以及对于第二和第四OFDM符号变为“0”。复数第K次幂计算器163和用于第K阶失真均衡的LMS电路130仅仅在系数更新控制信号为“1”的时间段内工作。然后,复数平方计算器164和用于第二阶失真均衡的LMS电路130仅仅在该系数更新控制信号为“2”的时间段中工作。
在该系数更新控制信号为“1”的时间段中,选择器742选择复数第K次幂计算器163的输出xK(n),在“2”的时间段中选择复数平方计算器164的输出x2(n),并且在“0”的时间段中选择H(k),然后输出到FFT电路502。FFT电路502对所选择的信号执行FFT变换,并且把变换结果输出到每一阶的LMS电路130以及外部电路。在四个OFDM符号周期的每个部分中,FFT电路502输出用于第一OFDM符号的变换值XK g(k),输出用于第三OFDM符号的变换值X2 g(k)以及输出用于第二和第四OFDM符号的延迟概况h’(n)。用于第K阶失真均衡和用于第二阶失真均衡的LMS电路130分别仅仅对第一和第三OFDM符号进行操作。另外,仅仅当延迟概况h’(n)被输出时,到外部电路的输出才对第二和第四OFDM符号有效。
根据上述操作,仅仅通过补偿第二阶失真或更高阶的失真高阶非线性失真并且通过添加选择器可以计算延迟概况而不增加功耗。在补偿其它阶的非线性失真的情况中,添加第m阶的复数第n次幂计算器和LMS电路130,并且可以更新在系数估计控制器511中产生的系数更新控制信号,如果需要的话可以增加选择器742的复用程度。
另外,在图50的非线性失真均衡器611中用于非线性失真均衡的系数估计器612被图54的用于非线性失真均衡的非线性失真均衡器651所代替的情况中,可以用相同的方式补偿第二阶失真或更高阶的任意高阶非线性失真。方程(5-26)被用于该各个阶次中作为这种情况下的系数更新方程。在图69中示出用于非线性失真均衡的系数估计器751的结构。该电路是通过把一个复数除法器505分别提供到在图68的用于非线性失真均衡的系数估计器741每一阶的LMS电路130的前级而获得的。
在此,在上述补偿第二阶失真或更高阶的任意高阶非线性失真的每个例子中,示出一种情况,其中该结构分别具有复数第K次幂计算器163、复数平方计算器164以及每一阶的复数第m次幂计算器。但是,通过例如顺序把I和Q轴分量的次幂顺序输出到下一个更高阶的电路可以按照实施例1的相同方式实现电路的共享。另外,可以使用用于电路共享的其它方法。
实施例6
下面参照附图描述本发明的实施例6中用于数据接收器的前端处理器。图70为示出用于本实施例中的数据接收器的前端处理器800的结构的方框图。用于数据接收器的前端处理器800包括准同步检测器808和非线性失真均衡器801。图70的非线性失真均衡器801是通过在图30的非线性失真均衡器501中把用于非线性失真均衡的系数估计器506替换为用于非线性失真均衡的系数估计器541,并且把同步检测解调器503替换为一个差分解调器802而获得的。该差分解调器802具有单个符号延迟电路803和复数除法器505。
当由未示出的天线接收受到差分载波调制的一个OFDM调制信号时,准同步检测器108按照与实施例1中相同的方式执行I轴和Q轴数据的检测,从而产生一个检测的输出x(n)。
在下文中描述非线性失真均衡器801的操作。用于非线性失真均衡的复数信号转换器102使用在用于非线性失真均衡的系数估计器541中产生的用于第三阶失真均衡的系数a3(n),并且消除包含在信号x(n)中的第三阶失真,从而输出信号y(n)。然后,FFT电路502执行该信号y(n)的FFT变换,从而把频率轴上的信号f(n)输出到差分解调器802。
如图70中所示执行用于L点的FFT变换,从而该处理延迟变为2L个样本。在差分解调器802中,该单个符号延迟电路803把f(n)延迟一个OFDM符号,从而输出f(n-L),并且复数除法器505执行复数除法,把f(n)除以f(n-L),从而执行差分解调。然后,差分解调器802把解调信号q(n)输出到误差估计器104。误差估计器104计算信号q(n)与最接近的映射点d(n)之间的误差,并且把该映射点d(n)输出到纠错部分,作为一个解调信号。在此,在该纠错部分执行软判定解码的情况下,非线性失真均衡器801把误差估计器104的输入q(n)输出到该纠错部分作为一个解调信号。
用于非线性失真均衡的系数估计器541使用该误差信号e(n)和信号x(n)以及信号f(n-L)从而根据LMS算法更新系数a3(n)。用于非线性失真均衡的系数估计器541的结构与图35中所示的相同,并且仅仅到达复数除法器505的传输路径特性H(k)被信号f(n-L)所代替。在此,当假设差分解调器802和误差估计器104没有延迟时,在从信号y(n)计算误差信号e(n)的过程中,延迟量变为FFT电路502的2L个样本。在用于非线性失真均衡的系数估计器541中的延迟量还对应于FFT电路502的2L个样本,从而它们的延迟量变为相等。根据上述操作,可以补偿受到差分载波调制的OFDM频带信号中的非线性失真。
在下文中描述在本实施例中用于非线性失真均衡的系数估计器541的系数更新算法。该误差信号e(n)由来自图70的方程(5-1)所表示。
q(n)=f(n)/f(n-L)…方程(6-1)
方程(6-1)和方程(5-3)被代入(5-1)从而获得如下方程。
e(n)=d(n)-FFT(y(n))/f(n-L)…方程(6-2)
方程(1-1)被代入方程(6-2),从而获得如下方程。
e(n)=d(n)-FFT(x(n)+a3(n)x3(n))/f(n-L)…方程(6-3)
由于在LMS算法中系数更新的收敛速度相对较慢,因此系数a3(n)被认为是长量,从而获得如下方程。
e(n)=d(n)-FFT(x(n))/f(n-L)+a3(n)·FFT(x3(n))/f(n-L)…方程(6-4)
在此,方程(6-4)被代入方程(1-5),并且可以执行偏微分,从而获得如下方程。
dJ(a3)/da3(n)=2[e(n)·de(n)/da3(n)]
=-2e(n)[FFT(x3(n))/f(n-L)]*…方程(6-5)
假设u=2α,并且方程(6-5)被代入方程(1-6),从而获得如下方程。
a3(n+1)=a3(n)+ue(n)[FFT(x3(n))/f(n-L)]*…方程(6-6)
而,系数a3(n)由来自图35的如下方程所表示。
a3(n)=a3(n-1)+ue(n)[FFT(|x2(n)|x(n))/f(n-L)]*…方程(6-7)
与方程(6-7)中误差信号e(n)、信号x(n)和信号f(n-L)相比,系数a3(n)被延迟一个样本。但是,由于在LMS算法中的系数更新相对较慢,因此该延迟实际上不造成障碍。
当FFT电路502在时间n=T处开始按照与实施例5相同的方式工作时,其中n的范围在方程(5-11)中,在该时间段中信号y(n)和立方值X3(k)的FFT变换分别表示为变换值Yg(k)和X3 g(k),从而形成如下方程。
Yg(k)=∑j=(T+gL)to(T+(g+1)L-1)y(j)WL k(j-T-gL),WL=e-j2pie/L(k=0,1,…,L-1)…方程(6-8)
在此,X3 g(k)变为与方程(5-12)中的相同。
然后,f(n-L)由如下方程所表示。
f(n-L)=FFT(y(n-L))…方程(6-9)
当f(n-L)和FFT(x3(n))被分别表示为Yg(k’)和X3 g(k),并且假设k’=n’-T-gL(n’=n-L)以及k=n-T-gL,获得如下方程。
a3(n+1)=a3(n)+ue(n)[X3 g(n-T-gL)/Yg-1(n’-T-(g-1)L)]*…方程(6-10)
例如,在本实施例中,对于每两个点中的一个点可以用作为来自图35的用于非线性失真均衡的系数估计器541中FFT电路502的输出的一个代表值,并且剩余的一个点可以按照与实施例5相同的方式被插值作为一个代表值。这种情况中,仅仅通过由虚线所包围的一个部分就可以实现图32的蝴蝶运算电路521,从而可以按照与实施例5相同的方式把电路规模减小到大约1/2。
另外,例如在图35的用于非线性失真均衡的系数估计器541中FFT电路502的输入中,对于每两个点中的一个点可以被使用来执行1/2点数的FFT变换,从而获得一个代表值,并且剩余的一个点可以被插值作为一个代表值。这种情况中,按照与实施例5相同的方式,图33的FFT电路502被用于非线性失真均衡的系数估计器541中的图37的FFT电路561所代替。结果,图32的蝴蝶运算电路521被图36的蝴蝶运算电路551所代替,从而与图32的蝴蝶运算电路521相比,电路规模可以减小到大约1/4。
另外,在图35中用于非线性失真均衡的系数估计器541可以被取消,从而对图70中的非线性失真均衡器801内的FFT电路502执行时分复用。
图71示出这种情况中用于数据接收器的前端处理器的结构。图71的非线性失真均衡器811是通过把图39的非线性失真均衡器571中用于非线性失真均衡的系数估计器573替换为用于非线性失真均衡的系数估计器591,并且把同步检测解调器503替换为差分解调器802而获得的。
差分解调器802执行复数除法,把信号f(n)除以信号f(n-L),从而执行差分解调,以便于把信号q(n)输出到误差估计器104。在非线性失真均衡器811中的用于非线性失真均衡的系数估计器591通过使用信号x(n)、变换值X3 g(k)、误差信号e(n)和信号f(n-L)作为输入而执行系数更新,并且把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的复数信号转换器102。除此之外的其它部分的操作与图39的非线性失真均衡器571相同。
用于非线性失真均衡的系数估计器591与图49中所示的相同,并且到达复数除法器505的传输路径特性H(k)被信号f(n-L)所代替。根据上述操作,对工作的一个FFT电路执行时分复用,并且可以用较小的电路规模补偿受到差分载波调制的OFDM基带信号中的非线性失真。
另外,在图70的非线性失真均衡器801中的差分解调器802产生传输路径特性H(k),并且可以对传输路径特性H(k)执行应用到FFT电路502的时分复用,从而可以计算延迟概况h’(n)。
在图72中示出在这种情况中的用于数据接收器的前端处理器820的结构。图72的非线性失真均衡器821是通过把图47的非线性失真均衡器601中用于非线性失真均衡的系数估计器506替换为用于非线性失真均衡的系数估计器541,并且把同步检测解调器503替换为差分解调器802而获得的。
差分解调器802执行复数乘法,把信号f(n)除以信号f(n-L),从而执行差分解调,以便于把信号q(n)输出到误差估计器104。然后,信道特性估计器504通过使用包含在信号f(n)中的导频信号等等计算传输路径特性H(k),并且把该传输路径特性H(k)输出到FFT电路572。用于非线性失真均衡的系数估计器541通过使用信号x(n)、误差信号e(n)和信号f(n-L)作为输入而执行系数更新,并且把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的复数信号转换器102。除此之外的其它部分的操作与图47的非线性失真均衡器601相同。用于非线性失真均衡的系数估计器541与图35中所示的相同,并且仅仅到达复数除法器505的传输路径特性H(k)被信号f(n-L)所代替。
根据上述操作,补偿受到差分载波调制的OFDM基带信号中的非线性失真,并且可以计算延迟概况而不添加新电路。
另外,在图70的非线性失真均衡器801中差分解调器802产生传输路径特性H(k)。非线性失真均衡器801对传输路径特性H(k)执行时分复用,从而应用到用于非线性失真均衡的系数估计器541中的FFT电路502,可以计算延迟概况h’(n)。
在图73中示出在这种情况中用于数据接收器的前端处理器830的结构。图37的非线性失真均衡器831是通过把图50的非线性失真均衡器611中用于非线性失真均衡的系数估计器612替换为用于非线性失真均衡的系数估计器621,并且把同步检测解调器503替换为差分解调器802而获得的。
差分解调器802执行复数乘法,把信号f(n)除以信号f(n-L),从而执行差分解调。差分解调器802把解调信号q(n)输出到误差估计器104。另外,在差分解调器802中的信道特性估计器504通过使用包含在信号f(n)中的导频信号计算传输路径特性H(k),并且把该传输路径特性H(k)输出到用于非线性失真均衡的系数估计器621。用于非线性失真均衡的系数估计器621通过使用信号x(n)、误差信号e(n)和信号f(n-L)作为输入而执行系数更新。用于非线性失真均衡的系数估计器621把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的复数信号转换器102,并且允许传输路径特性H(k)被输入到用于非线性失真均衡的系数估计器621,从而产生被输出的延迟概况h’(n)。
除此之外的其它部分的操作与图50的非线性失真均衡器611相同。用于非线性失真均衡的系数估计器621与图52中所示的相同。仅仅到达复数除法器505的传输路径特性H(k)被信号f(n-L)所代替。根据上述操作,可以补偿受到差分载波调制的OFDM基带信号中的非线性失真。另外,可以计算延迟概况而不添加新电路。
另外,图35的用于非线性失真均衡的系数估计器541、图46的用于非线性失真均衡的系数估计器591和图52的用于非线性失真均衡的系数估计器621可以仅仅例如每两个OFDM符号中的一个OFDM符号执行系数更新。
图35的用于非线性失真均衡的系数估计器541、图46的用于非线性失真均衡的系数估计器591和图52的用于非线性失真均衡的系数估计器621可以按照实施例5的相同方式被提供有系数估计控制器511。用于非线性失真均衡的系数估计器中的每个电路在系数更新控制信号为“L”的时间段中停止工作。根据上述操作,尽管用于第三阶失真均衡的系数的收敛时间变得略长,但是可以把用于非线性失真均衡的系数估计器的功耗减少到大约1/2。
另外,在图73的非线性失真均衡器831中的用于非线性失真均衡的系数估计器621可以仅仅对例如每两个OFDM符号中的一个OFDM符号执行系数更新,并且可以在不执行系数更新的OFDM符号的周期中计算延迟概况h’(n)。
上述图54示出在这种情况中用于非线性失真均衡的系数估计器641的结构。在此,到达复数除法器505的传输路径特性H(k)被信号f(n-L)所代替。其操作与实施例5中的相同。根据上述操作,可以补偿在受到差分载波调制的OFDM基带信号中的非线性失真。另外,仅仅通过添加一个选择器可以计算延迟概况而不增加功耗。
另外,在图71的非线性失真均衡器811中用于非线性失真均衡的系数估计器591例如仅仅对每两个OFDM符号中的一个OFDM符号执行系数更新,并且在不执行系数更新的OFDM符号的周期中计算延迟概况h’(n)。在这种情况中,可以对传输路径特性H(k)的频率转换执行时分复用,该传输路径特性H(k)被施加到非线性失真均衡器811中的FFT电路572。
图74中示出在这种情况中用于数据接收器的前端处理器840的结构。图74的非线性失真均衡器841是通过把图56的非线性失真均衡器661中的同步检测解调器503替换为差分解调器802而实现的。
差分解调器802执行复数除法,把信号f(n)除以信号f(n-L),从而执行差分解调,以便于把该信号q(n)输出到误差估计器104。然后,在差分解调器802中的信道特性估计器504通过使用包含在信号f(n)中的导频信号等等计算传输路径特性H(k),并且把该传输路径特性H(k)输出到选择器632。用于非线性失真均衡的系数估计器591通过使用信号x(n)、变换值Xg(k)、误差信号e(n)和信号f(n-L)作为输入而执行系数更新,并且把用于第三阶失真均衡的系数a3(n)输出到用于非线性失真均衡的复数信号转换器102。除此之外的其它部分的操作与图56的非线性失真均衡器661相同。
用于非线性失真均衡的系数估计器591与图46中所示的相同。在此,到达复数除法器505的传输路径特性H(k)被信号f(n-L)所代替,并且立方值x3(n)被从复数立方计算器121输出到选择器632。选择器632通过系数更新控制信号选择该立方值x3(n)或者传输路径特性H(k),并且把所选择的信号输出到FFT电路572。
根据上述操作,仅仅对一个工作的FFT电路执行时分复用,并且使用较小的电路规模补偿受到差分载波调制的OFDM基带信号中的非线性失真。然后,仅仅通过添加一个选择器可以计算延迟概况而不增加功耗。
另外,图35的用于非线性失真均衡的系数估计器541、图46的用于非线性失真均衡的系数估计器591、图52的用于非线性失真均衡的系数估计器621以及图54的用于非线性失真均衡的系数估计器641可以仅仅在高C/N时执行系数更新。在图70的非线性失真均衡器801中、图71的非线性失真均衡器811中、图72的非线性失真均衡器821中、图73的非线性失真均衡器831中以及图74的非线性失真均衡器841中提供C/N估计器116,使得该C/N估计器116计算和平均该C/N,并且把结果输出,作为CNR信号。
在由CNR信号所示的C/N小于该设置阈值的情况下,用于非线性失真均衡的系数估计器设置a3(n)=0,并且用于非线性失真均衡的复数信号转换器102按照与实施例1相同的方式输出y(n)=x(n)。在由CNR信号所示的C/N为该设置阈值或更大的情况下,用于非线性失真均衡的系数估计器执行系数更新。根据上述操作,当C/N为低时,可以补偿在受到差分载波调制的OFDM基带信号中的非线性失真而没有负面影响。
在此,尽管在本实施例中仅仅把在非线性失真中显著的第三阶失真消除,如方程(1-1)所示。但是,可以通过使用方程(1-11)补偿第二阶或更高阶的任何高阶的非线性失真。作为用于在这种情况下的系数更新方程,对于各个阶次形成如下方程。
am(n+1)=am(n)+ue(n)[FFT(xm(n))/f(n-L)]*(m>1)…方程(6-11)
在此,形成xm(n)=|xm-1(n)|x(n)。
图58中示出通过使用图70的非线性失真均衡器801和图72的非线性失真均衡器821中的方程(6-11)补偿不低于第二阶失真并且不高于第K阶失真的高阶非线性失真的用于非线性失真均衡的系数估计器681的结构。也就是说,到达复数除法器505的传输路径特性H(k)被信号f(n-L)所代替。根据上述操作,可以补偿第二阶或更高的任意高阶非线性失真。
另外,按照相同的方式,在图71的非线性失真均衡器811中以及在图74的非线性失真均衡器841中补偿第二阶或更高的任意高阶非线性失真。在这种情况中用于非线性失真均衡的系数估计器711与图65中所示的相同。也就是说,到达复数除法器505的传输路径特性H(k)仅仅被信号f(n-L)所代替。
另外,按照相同的方式,在图73的非线性失真均衡器831中补偿第二阶或更高的任意高阶非线性失真。在这种情况中用于非线性失真均衡的系数估计器731与图67中所示的相同。也就是说,到达复数除法器505的传输路径特性H(k)仅仅被信号f(n-L)所代替。
另外,在图73的非线性失真均衡器831中用于非线性失真均衡的系数估计器721被图54的用于非线性失真均衡的系数估计器641所代替的情况下,按照相同的方式,可以补偿第二阶或更高的任意高阶非线性失真。在这种情况中用于非线性失真均衡的系数估计器751与图69中所示的相同。也就是说,到达复数除法器505的传输路径特性H(k)仅仅被信号f(n-L)所代替。
在此,在每个上述例子中,其中可以补偿第二阶或更高阶的任意高阶非线性失真,示出一种情况,分别提供复数第K次幂计算器163、复数平方计算器164和用于每一阶的复数第m次幂计算器。但是,例如通过按照实施例1相同的方式把I和Q轴分量顺序输出下一个高阶的电路可以实现电路的共享。另外,可以使用其它共享方法。
实施例7
下面参照附图描述本发明的实施例7中的用于数据接收器的前端处理器。图75为示出本实施例中的用于数据接收器的前端处理器900的结构。用于数据接收器的前端处理器包括准同步检测器108和非线性失真均衡器901。图75的非线性失真均衡器901是通过把图70的非线性失真均衡器801中的差分解调器802和用于非线性失真均衡的系数估计器541替换为一个差分解调器902和用于非线性失真均衡的系数估计器905而获得的。差分解调器902具有单个符号延迟电路803、复数共轭计算器903和复数乘法器904。复数共轭计算器903是用于仅仅把Q数据的正负号反转以产生一个复数共轭的电路。
当由未示出的天线接收受到差分载波调制的一个OFDM调制信号时,准同步检测器108按照与实施例1中相同的方式执行I轴和Q轴数据的检测,从而产生一个检测的输出x(n)。
在下文中描述非线性失真均衡器901的操作。在差分解调器902中,该单个符号延迟电路803把f(n)延迟一个OFDM符号,从而输出f(n-L)。然后,复数共轭计算器903产生信号f(n-L)的复数共轭信号f(n-L)*。复数乘法器904执行复数乘法,把f(n)乘以复数共轭信号f(n-L)*,从而执行差分解调,以便于把信号q(n)输出到误差估计器104。除了用于非线性失真均衡的系数估计器905的结构之外,其它部分的操作与图70的非线性失真均衡器801相同。
用于非线性失真均衡的系数估计器905在图76中示出。用于非线性失真均衡的系数估计器905是通过把图35的用于非线性失真均衡的系数估计器541中的复数除法器505替换为复数乘法器904,并且把到达复数乘法器904的传输路径特性H(k)替换为信号f(n-L)*而获得的。
在此,当假设图75的差分解调器902和误差估计器104没有信号处理的延迟,在从信号y(n)计算误差信号e(n)过程中的延迟量变为FFT电路502的2L个样本。在用于非线性失真均衡的系数估计器905中的延迟量还对应于FFT电路502的2L个样本,从而它们的延迟量变为相等。根据上述操作,可以补偿受到差分载波调制的OFDM基带信号中的非线性失真。
下面描述在本实施例中用于非线性失真均衡的系数估计器905的系数更新算法。误差信号e(n)在来自图75的方程(5-1)中表示。另外,定义如下方程。
q(n)=f(n)·f(n-L)*…方程(7-1)
方程(7-1)和方程(5-3)被代入方程(5-1),从而获得如下方程。
e(n)=d(n)-FFT(y(n))·f(n-L)*…方程(7-2)
方程(1-1)被代入方程(7-2),从而获得如下方程。
e(n)=d(n)-FFT(x(n)+a3(n)x3(n))·f(n-L)*…方程(7-3)
由于LMS算法的系数更新收敛速度较慢,因此当把系数a3(n)作为常量时获得如下方程。
e(n)=d(n)-FFT(x(n))·f(n-L)*+a3(n)·FFT(x3(n))·f(n-L)*…方程(7-4)
在此,方程(7-4)被代入方程(5-1),并且执行偏微分,从而获得如下方程。
dJ(a3)/da3(n)=2[e(n)·de(n)/da3(n)]=-2e(n)[FFT(x3(n))·f(n-L)*]*…方程(7-5)
当假设u=2α时,并且把方程(7-5)代入方程(1-6)时,获得如下方程。
a3(n+1)=a3(n)+ue(n)[FFT(x3(n))·f(n-L)*]*…方程(7-6)
另一方面,系数a3(n)被在如下方程中表示。
a3(n)=a3(n-1)+ue(n)[FFT(x3(n))·f(n-L)*]*…方程(7-7)
在方程(7-7)中,与误差信号e(n)、信号x(n)和信号f(n-L)*相比,系数a3(n)被延迟一个符号。但是,由于LMS算法的系数更新收敛速度相对较慢,因此该延迟实际上不成为障碍。
FFT电路502在时间n=T时按照与实施例5相同的方式开始工作。当n的范围由方程(5-11)所定义时,在该时间段中信号y(n)和立方值x3(n)的FFT变换分别被表示为Yg(k)和X3 g(k)。在这种情况中,立方值Yg(k)由方程(6-8)所定义,并且所转换数值X3 g(k)由方程(5-12)所定义。
信号f(n-L)在方程(6-9)中表示,并且在方程(7-6)中,信号f(n-L)和FFT(x3(n))分别表示为变换值Yg(k’)和X3 g(k),从而当k’=n’-T-gL(n’=n-L)和k=n-T-gL时获得如下方程。
a3(n+1)=a3(n)+ue(n)[X3 g(n-T-gL)·Yg-1(n’-T-(g-1)L)*]*…方程(7-8)
按照与实施例5相同的方式,图76的用于非线性失真均衡的系数估计器905中FFT电路502的输出中对于每两个点中的一个点可以被用作为一个代表值,而剩余的一个点可以被用作为一个代表值。这种情况中,图32的蝴蝶运算电路521仅仅可以用由虚线所包围的一个部分来实现,从而按照与实施例5相同的方式电路规模可以减小到大约1/2。
另外,按照与实施例5相同的方式,图76的用于非线性失真均衡的系数估计器905中FFT电路502的输出中对于每两个点中的一个点可以使用,以执行作为代表值的1/2点数的FFT变换,而剩余的一个点可以被插值作为代表值。这种情况中,按照实施例5中的相同方式,在用于非线性失真均衡的系数估计器905中,图33的FFT电路502被图37的FFT电路561所代替。结果,图32的蝴蝶运算电路521被图36的蝴蝶运算电路551所代替。因此,与图32的蝴蝶运算电路521相比,电路规模减小到大约1/4。
另外,可以取消图75中用于非线性失真均衡的系数估计器905中的FFT电路502,从而可以对图75中非线性失真均衡器901中的FFT电路502执行时分复用。
在图77中示出这种情况下用于数据接收器的前端处理器910的结构。图77的非线性失真均衡器911是通过把图71的非线性失真均衡器811中的差分解调器802和用于非线性失真均衡的系数估计器591替换为差分解调器902和用于非线性失真均衡的系数估计器912而获得的。
差分解调器902执行信号f(n)和复数共轭信号f(n-L)*之间的复数乘法,从而执行差分解调,以便于把信号q(n)输出到误差估计器104。除了用于非线性失真均衡的系数估计器912的操作之外,其它部分的操作与图71的非线性失真均衡器811相同。
图78中示出用于非线性失真均衡的系数估计器912的结构。用于非线性失真均衡的系数估计器912是通过把图46的用于非线性失真均衡的系数估计器591中的复数除法器505替换为复数乘法器904,并且把到达复数乘法器904的传输路径特性H(k)替换为信号f(n-L)*而获得的。根据上述操作,对工作的一个FFT电路执行时分复用,并且可以使用较小的电路规模补偿受到差分载波调制的OFDM基带信号中的非线性失真。
另外,在图75的非线性失真均衡器901中的差分解调器902产生传输路径特性H(k),并且对施加到FFT电路502的传输路径特性H(k)执行时分复用,从而可以计算延迟概况h’(n)。
在图79中示出在这种情况中的非线性失真均衡器921的结构。非线性失真均衡器921是通过把图72的非线性失真均衡器821中的差分解调器802和用于非线性失真均衡的系数估计器541替换为差分解调器902和用于非线性失真均衡的系数估计器905而获得的。
差分解调器902执行信号f(n)和复数共轭信号f(n-L)*之间的复数乘法,从而执行差分解调,以便于把信号q(n)输出到误差估计器104。另外,在差分解调器902中的信道特性估计器504通过使用包含在信号f(n)中的导频信号等等计算传输路径特性H(k),并且把该传输路径特性H(k)输出到FFT电路572。除了用于非线性失真均衡的系数估计器905的操作之外,其它部分的操作与图72的非线性失真均衡器821相同。
图76中示出用于非线性失真均衡的系数估计器905的结构。根据上述操作,可以补偿受到差分载波调制的OFDM基带信号中的非线性失真。另外,可以计算延迟概况而不增加新电路。
另外,在图75的非线性失真均衡器901中的差分解调器902产生传输路径特性H(k),并且对施加到FFT电路502的传输路径特性H(k)执行时分复用,从而可以计算延迟概况h’(n)。
在图80中示出在这种情况中的用于数据接收器的前端处理器930的结构。非线性失真均衡器931是通过把图73的非线性失真均衡器831中的差分解调器802中用于非线性失真均衡的系数估计器621替换为差分解调器902和用于非线性失真均衡的系数估计器932而获得的。
差分解调器902执行信号f(n)和复数共轭信号f(n-L)*之间的复数乘法,从而执行差分解调,以便于把信号q(n)输出到误差估计器104。另外,信道特性估计器504通过使用包含在信号f(n)中的导频信号等等计算传输路径特性H(k),并且把该传输路径特性H(k)输出到用于非线性失真均衡的系数估计器932。除了用于非线性失真均衡的系数估计器932的操作之外,其它部分的操作与图73的非线性失真均衡器831相同。
用于非线性失真均衡的系数估计器932的结构在81中示出。用于非线性失真均衡的系数估计器932是通过把图52的用于非线性失真均衡的系数估计器621中的复数除法器505替换为复数乘法器904,并且把到达复数乘法器904的传输路径特性H(k)替换为信号f(n-L)*而获得的。根据上述操作,可以补偿受到差分载波调制的OFDM基带信号中的非线性失真。从而,可以计算延迟概况而不添加新电路。
另外,图76的用于非线性失真均衡的系数估计器905、图78的用于非线性失真均衡的系数估计器912和图81的用于非线性失真均衡的系数估计器932可以仅仅对每两个OFDM符号中的一个OFDM符号执行系数更新。
按照与实施例5中相同的方式,在图76的用于非线性失真均衡的系数估计器905、图78的用于非线性失真均衡的系数估计器912和图81的用于非线性失真均衡的系数估计器932中提供系数估计控制器511。按照与实施例5相同的方式,在用于非线性失真均衡的系数估计器中的每个电路在系数更新控制信号为“L”时的时间段中停止工作。根据上述操作,即使用于第三阶失真均衡的系数的收敛时间变得略长,用于非线性失真均衡的系数估计器的功耗可以减少到大约1/2。
另外,在图80的非线性失真均衡器931中用于非线性失真均衡的系数估计器932可以仅仅对每两个OFDM符号中的一个OFDM符号执行系数更新,并且可以在不执行系数更新的OFDM符号的周期中计算延迟概况h’(n)。
图82中示出这种情况的用于非线性失真均衡的系数估计器941的结构。用于非线性失真均衡的系数估计器941是通过把图54的用于非线性失真均衡的系数估计器641中的复数除法器505替换为复数乘法器904,并且把到达复数乘法器904的传输路径特征H(k)替换为信号f(n-L)*。根据上述操作,可以补偿已经受到差分载波调制的OFDM基带信号中的非线性失真。另外,仅令通过添加一个选择器可以计算延迟概况而不增加功耗。
另外,在图77的非线性失真均衡器911中用于非线性失真均衡的系数估计器912仅仅对每两个OFDM符号中的一个OFDM符号执行系数更新,并且可以在不执行系数更新的OFDM符号的周期中计算延迟概况h’(n)。这种情况中,可以对非线性失真均衡器911中的FFT电路572执行时分复用。
图83中示出在这种情况中用于数据接收器的前端处理器950的结构。非线性失真均衡器951是通过把图74的非线性失真均衡器831中的非线性失真均衡器841中的差分解调器802和用于非线性失真均衡的系数估计器591替换为差分解调器902和用于非线性失真均衡的系数估计器912而获得的。
差分解调器902执行信号f(n)和复数共轭信号f(n-L)*之间的复数乘法,从而执行差分解调,以便于把信号q(n)输出到误差估计器104。另外,信道特性估计器504通过使用包含在信号f(n)中的导频信号等等计算传输路径特性H(k),并且把该传输路径特性H(k)输出到选择器632。除了用于非线性失真均衡的系数估计器912的操作之外,其它部分的操作与非线性失真均衡器841相同。
用于非线性失真均衡的系数估计器912与图78中所示的相同。立方值x3(n)被从复数立方计算器121输出到选择器632。选择器632通过系数更新控制信号选择该立方值x3(n)或者传输路径特性H(k),并且把所选择的信号输出到FFT电路572。
根据上述操作,仅仅对一个工作的FFT电路执行时分复用,并且可以使用较小的电路规模补偿受到差分载波调制的OFDM基带信号中的非线性失真。另外,仅仅通过添加一个选择器可以计算延迟概况而不增加功耗。
另外,图76的用于非线性失真均衡的系数估计器905、图78的用于非线性失真均衡的系数估计器912、图81的用于非线性失真均衡的系数估计器932以及图82的用于非线性失真均衡的系数估计器941可以仅仅在高C/N时执行系数更新。C/N估计器116被提供在图75的非线性失真均衡器901中、图77的非线性失真均衡器911中、图79的非线性失真均衡器921中、图80的非线性失真均衡器931中以及图83的非线性失真均衡器951中。然后,C/N估计器116计算并平均该C/N,并且输出其结果作为一个CNR信号。
在由CNR信号所示的C/N小于设置的阈值的情况中,用于非线性失真均衡的系数估计器设置a3(n)=0,并且用于非线性失真均衡的复数信号转换器102输出y(n)=x(n)。在由CNR信号所示的C/N为设置的阈值或更大的情况下,用于非线性失真均衡的系数估计器执行系数更新。根据上述操作,可以补偿受到差分载波调制的OFDM基带信号中的非线性失真,而没有在低C/N的时候造成负面影响。
在此,在本实施例中,仅仅消除作为方程(1-1)中所示的非线性失真的主要的第三阶失真。但是,通过使用方程(1-11)可以补偿第二阶或更高阶的任意高阶非线性失真。作为这种情况的系数更新方程,获得在各个阶次中的如下方程:
am(n+1)=am(n)+ue(n)[FFT(xm(n))·f(n-L)*]*(m>1)…方程(7-9)
在此,形成xm(n)=|xm-1(n)|x(n)。
图84中示出用于非线性失真均衡的系数估计器961的结构图,其通过使用图75的901和图79的非线性失真均衡器921中的方程(7-9)至少补偿第二阶失真最多补偿第K阶失真的高阶非线性失真。用于非线性失真均衡的系数估计器961是通过把图58的用于非线性失真均衡的系数估计器681中的复数除法器505替换为复数乘法器904并且把到达复数乘法器904的传输路径特性H(k)替换为信号f(n-L)*而获得的。根据上述操作,可以补偿第二阶或更高阶的任意高阶非线性失真。
另外,按照相同的方式在图77的非线性失真均衡器911和图83的非线性失真均衡器951中可以补偿第二阶或更高阶的任意高阶非线性失真。这种情况的用于非线性失真均衡的系数估计器971的结构在图85中示出。用于非线性失真均衡的系数估计器971是通过把图65的用于非线性失真均衡的系数估计器711中的复数除法器505替换为复数乘法器904并且把到达复数乘法器904的传输路径特性H(k)替换为信号f(n-L)*而获得的。
另外,按照相同的方式在图80的非线性失真均衡器931中可以补偿第二阶或更高阶的任意高阶非线性失真。这种情况的用于非线性失真均衡的系数估计器981的结构在图86中示出。用于非线性失真均衡的系数估计器981是通过把用于非线性失真均衡的系数估计器731中的复数除法器505替换为复数乘法器904并且把到达复数乘法器904的传输路径特性H(k)替换为信号f(n-L)*而获得的。
另外,在图80中的非线性失真均衡器931中用于非线性失真均衡的系数估计器932被替换为图82的用于非线性失真均衡的系数估计器941,按照相同的方式,可以补偿第二阶或更高阶的任意高阶非线性失真。这种情况的用于非线性失真均衡的系数估计器991的结构在图87中示出。用于非线性失真均衡的系数估计器991是通过把图69的用于非线性失真均衡的系数估计器751中的复数除法器705替换为复数乘法器904并且把到达复数乘法器904的传输路径特性H(k)替换为信号f(n-L)*而获得的。
在此,示出一种情况,其中补偿第二阶或更高阶的任意高阶非线性失真的上述例子分别具有复数第K次幂计算器163、复数平方计算器164和每一阶的复数第m次幂计算器。但是,按照与实施例1相同的方式,例如通过把I和Q轴分量顺序输出到下一个较高阶的电路可以实现电路的共享。另外,可以使用其它共享方法。
在此,在实施例1至7中,用准同步检测器108执行正交检测。但是这仅仅是一个例子,并且可以用其它方法执行正交检测。
在实施例1至7中,方程(1-1)和(1-11)示出用于非线性失真均衡的复数信号转换器的转换方程。但是,这仅仅是例子,可以使用其它转换方程。另外,在实施例1至7中使用xm(n)=|xm-1(n)|x(n)(m>1),特别是x3(n)=|x2(n)|x(n),但是其它方程也可以用作为表示xm(n)和x3(n)(m>1)的方程。
另外,在上述实施例中,方程(1-8)、(1-10)和(1-12)被用作为用于非线性失真均衡的系数估计器的系数更新方程。但是,可以对每d个符号(d为大于等于2的整数)执行一次系数更新,或者可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,在上述实施例2中,方程(2-1)、(2-3)和(2-4)被用作为用于非线性失真均衡的系数估计器的系数更新方程。但是,可以对每d个符号(d为大于等于2的整数)执行一次系数更新,或者可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,在上述实施例3中,方程(1-8)、(1-10)、(3-4)至(3-6)和(1-12)被用作为用于非线性失真均衡的系数估计器的系数更新方程。但是,可以对每d个符号(d为大于等于2的整数)执行一次系数更新,或者可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,在上述实施例4中,方程(2-1)、(4-3)至(4-6)和(2-4)被用作为用于非线性失真均衡的系数估计器的系数更新方程。但是,可以对每d个符号(d为大于等于2的整数)执行一次系数更新,或者可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,在上述实施例5中,方程(5-8)、(5-10)、(5-25)和(5-26)被用作为用于非线性失真均衡的系数估计器的系数更新方程。但是,可以对每d个符号(d为大于等于2的整数)执行一次系数更新,或者可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,在上述实施例6中,方程(6-6)和(6-11)被用作为用于非线性失真均衡的系数估计器的系数更新方程。但是,可以对每d个符号(d为大于等于2的整数)执行一次系数更新,或者可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,在上述实施例7中,方程(7-6)和(7-9)被用作为用于非线性失真均衡的系数估计器的系数更新方程。但是,可以对每d个符号(d为大于等于2的整数)执行一次系数更新,或者可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,尽管在上述实施例1至4中没有具体描述调制系统,但是应用本发明的非线性失真均衡器的调制系统不限于特定的系统,而可以是各种调制系数,例如OFDM、QAM、VSB或PSK。
另外,尽管在上述实施例1至7中用于非线性失真均衡的系数估计器的步长参数u对每个阶次是共享的,但是可以对每个阶次分配各不相同的一个步长参数um。
另外,相位同步建立的确定方法、上述实施例1至4中所示的C/N计算方法以及在上述实施例3和4中的线性失真均衡收敛的确定方法仅仅是举例,并且可以使用其它方法。
另外,在上述实施例5至7中所示的C/N计算方法仅仅是举例,并且可以使用其它方法。
另外,尽管在上述实施例1至7中示出一种情况,其中把上升余弦滤波器用作为非线性失真均衡器中的低通滤波器,但是可以使用其它低通滤波器。
另外,在本实施例3中,把方程(3-2)用作为用于线性失真均衡的系数估计器的系数更新方程。但是可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,在本实施例4中,把方程(4-1)用作为用于线性失真均衡的系数估计器的系数更新方程。但是可以使用除了最陡梯度方法之外的LMS算法或者除了LMS之外的一种算法。
另外,尽管在本实施例5中,通过使用图30中所示的同步检测解调器503执行同步解调,但是这仅仅是一个例子。
另外,尽管在上述实施例6和7中,通过使用图70中所示的差分解调器802和图75中所示的差分解调器902执行差分解调,但是这仅仅是一个例子。
另外,在上述实施例5至7中,FFT的点数L=4被用作为用于描述FFT电路502的操作的一个例子。另外,为了简化,FFT电路502假设在时间n=T=0时开始工作,并且假设g=0。但是这些数值仅仅是举例。
另外,在上述实施例5至7中,在图33、37、41和60中分别示出FFT电路502、561、572和692的结构。然后,这些电路操作分别在图34、38、42至45和61至64中示出,而处理延迟为2L个样本。但是,这些仅仅是举例,并且本发明不限于上述例子。
下述实施例具有如下配置,其中系数估计控制器511输出一个系数更新控制信号,而对于每两个OFDM符号,仅仅有一个OFDM符号变为“H”。
(1)实施例5
图31的用于非线性失真均衡的系数估计器506
图40的用于非线性失真均衡的系数估计器573
图51的用于非线性失真均衡的系数估计器612
图53的用于非线性失真均衡的系数估计器631
(2)实施例5和6
图35的用于非线性失真均衡的系数估计器541
图46的用于非线性失真均衡的系数估计器591
图52的用于非线性失真均衡的系数估计器621
图54的用于非线性失真均衡的系数估计器641
(3)实施例7
图76的用于非线性失真均衡的系数估计器905
图78的用于非线性失真均衡的系数估计器912
图81的用于非线性失真均衡的系数估计器932
图82的用于非线性失真均衡的系数估计器941
但是,当f为大于或等于2的整数时,对于每f个OFDM符号,仅仅使一个OFDM符号变为“H”的系数更新控制信号被输出,从而在用于非线性失真均衡的上述系数估计器中的每个电路对于“L”的符号停止工作。
下列实施例具有一种配置,其中该系数更新控制信号对于所有“L”的符号操作FFT电路,从而计算该延迟概况h’(n)。
(1)实施例5;图53的用于非线性失真均衡的系数估计器631,
(2)实施例5和6;图54的用于非线性失真均衡的系数估计器641,
(3)实施例7;图82的用于非线性失真均衡的系数估计器941。
但是,为了减小功耗,当f为大于或等于2的整数时,从“L”的全部符号中对于每f个OFDM符号,可以仅仅在一个OFDM符号过程中计算延迟概况h’(n)。在这种情况中,FFT电路可以在剩余的(f-1)个OFMD符号的时间周期中停止。
下列实施例具有这样的配置,其中FFT电路572以两倍于正常速度的速度而工作,从而对全部符号计算延迟概况h’(n)。
(1)实施例5;图47的非线性失真均衡器601,
(2)实施例5和6,通过把图47的非线性失真均衡器601中的系数估计器替换为用于非线性失真均衡的系数估计器541而获得的非线性失真均衡器,
(3)实施例6;图72的非线性失真均衡器821,以及
(4)实施例7;图79的用于非线性失真均衡的非线性失真均衡器921。
但是,为了减小功耗,当f为大于或等于2的整数时,对于每f个OFDM符号,可以仅仅在一个OFDM符号过程中计算延迟概况h’(n)。在这种情况中,FFT电路可以在剩余的(f-1)个OFMD符号的时间周期中停止。
在下列实施例中,通过使FFT电路572以两倍于正常速度的速度而工作,从而对全部符号计算延迟概况h’(n)。
(1)实施例5;图51的系数估计器612,
(2)实施例5和6,图52的用于非线性失真均衡的系数估计器621,以及
(3)实施例7;图81的用于非线性失真均衡的系数估计器932。
但是,为了减小功耗,当f为大于或等于2的整数时,对于每f个OFDM符号,可以仅仅在一个OFDM符号过程中计算延迟概况h’(n)。在这种情况中,FFT电路可以在剩余的(f-1)个OFMD符号的时间周期中停止。
在下列实施例中,通过使FFT电路502用于全部符号,而计算延迟概况h’(n),其中系数更新控制信号为0。
(1)实施例5;图68的系数估计器741,
(2)实施例5和6,图69的用于非线性失真均衡的系数估计器751,以及
(3)实施例7;图87的用于非线性失真均衡的系数估计器991。
但是,为了减小功耗,当f为大于或等于2的整数时,在全部符号中,对于每f个OFDM符号,可以仅仅在一个OFDM符号过程中计算延迟概况h’(n)。在这种情况中,FFT电路502可以在剩余的(f-1)个OFMD符号的时间周期中停止。在补偿其它阶的非线性失真的情况中,可以用相同的方式进行配置以减小功耗。
下列实施例具有用于每一阶的复数FFT电路502。
(1)实施例5;图57的系数估计器671,
(2)实施例5和6,图58的用于非线性失真均衡的系数估计器681,以及
(3)实施例7;用于非线性失真均衡的系数估计器941。
但是,该电路例如可以替换为图41中所示的一个FFT电路572,从而按照两倍于正常速度的速度而工作,从而执行时分复用并且可以补偿第二阶失真和第K阶失真。在补偿其它阶的非线性失真的情况中,如果需要的话可以增加FFT电路572的复用程度。
另外,尽管在实施例5至7中没有特别提到频率同步,但是在频率同步的捕获过程中当假设a3(n)=0时,在建立频率同步之后可以开始用于非线性失真均衡的系数估计器的操作。
另外,在本实施例5至7中,对于每两个点中的一个点被用作为在用于非线性失真均衡的系数估计器中FFT电路502的输出的一个代表值,通过使用作为一个插值方程的方程(5-17),使剩余的一个点被插值。这仅仅是一个例子。当FFT变换的点数为L时,c为大于等于2的整数,q为大于等于0并且不大于c-1的整数,以及r为大于等于-(c-1)并且小于等于0的整数,设置如下方程:
X3 g((p-1)c+q+b)=X3 g((p-1)c+q)(p=2,3,…,(L/c-1))…方程(8-1)
X3 g((p-1)c+q+b)=X3 g((p-1)c+q)(p=1和q+b≥0)…方程(8-2)
X3 g((p-1)c+q+b)=X3 g((p-1)c+q)(p=L/c和q+b≤c-1)…方程(8-3)
X3 g-1(L+q+b)=X3 g((p-1)c+q)(p=1和q+b≤-1)…方程(8-4)
X3 g+1(q+b)=X3 g((p-1)c+q)(p=L/c和q+b≥c)…方程(8-5)
(b=r,r+1,...,r+(c-1))
如上述方程所示,对于每c个点中的一个点被用作为FFT变换的输出中的一个代表值,而剩余的(c-1)个点可以被插值为该代表值。
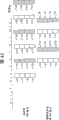
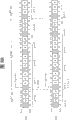
在此,在下文中描述方程(8-1)至(8-5)。以L=16,C=4和m=3的情况为例,补偿第三阶失真。使用方程(8-1)至(8-5)的插值模式在图88至95中示出。图88至95为针对于X3 g(k)的示意图,其中横坐标表示载波数k。
图88和89:q=0
图90和91:q=1
图92和93:q=2
图94和95:q=3
在此,(a)r=0,(b)r=-1,(c)r=-2和(d)r=-3。
在图88至95中,阴影线的方框表示用作为代表值的载波数,而剩余的方框表示用于通过来自分别表示载波数的方框中的数字进行插值的载波数。如图88至95中所示,在方程(8-1)至(8-5)中的每个字母表示如下内容。
p:在每个符号中第p个代表值(1≤p≤c/L)
q:用作为代表值的最小载波数(0≤q≤c-1)
b:一个载波数与用作为代表值的载波数之间的差值(r≤b≤r+(c-1))
r:b的最小值(-(c-1)≤r≤0)
q+b的范围在如下方程中表示:
-(c-1)≤q+b≤2(c-1)…方程(8-6)
也就是说,用作为代表值的该载波数由q所确定,并且执行插值载波数的范围通过使用第p个代表值来确定。当b为0时,用作为代表值的载波数由它本身所表示,并且当把-或+号附加到b上时,分别示出在被用作为代表值的载波数之前或之后的载波数。
L=16和c=4被代入方程(8-1)至(8-5),从而分别获得如下方程:
X3 g(4(p-1)+q+b)=X3 g(4(p-1)+q)(p=2,3)…方程(8-7)
X3 g(4(p-1)+q+b)=X3 g(4(p-1)+q)(p=1和q+b≥0)…方程(8-8)
X3 g(4(p-1)+q+b)=X3 g(4(p-1)+q)(p=4和q+b≤3)…方程(8-9)
X3 g-1(16+q+b)=X3 g(4(p-1)+q)(p=1和q+b≤-1)…方程(8-10)
X3 g+1(q+b)=X3 g(4(p-1)+q)(p=4和q+b≥4)…方程(8-11)
(b=r,r+1,...,r+3)
在方程(8-1)至(8-5)中的每个字母表示如下内容。
p:第p个代表值(1≤p≤4)
q:用作为代表值的最小载波数(0≤q≤3)
b:一个载波数与用作为代表值的载波数之间的差值(r≤b≤r+3)
r:b的最小值(-3≤r≤0)
q+b的范围在如下方程中表示:
-3≤q+b≤6…方程(8-12)
方程(8-7)至(8-9)示出一种情况,其中通过在第g个OFDM符号中结束而执行插值。由于L=16,因此载波数k在如下范围中:
0≤k≤15…方程(8-13)
根据方程(8-12)形成如下方程:
1≤4(p-1)+q+b≤14(p=2,3)…方程(8-14)
-3≤4(p-1)+q+b≤6(p=1)…方程(8-15)
9≤4(p-1)+q+b≤18(p=4)…方程(8-16)
当p=2或3,不需要使用多个方程来代表载波数,它仅仅在方程(8-7)中表示。另一方面,当形成p=1,q+b≤-1以超过方程(8-13)的范围,因此需要使用多个方程,即方程(8-8)和(8-10)。在q+b≤-1的情况下,也就是说在方程(8-15)中获得负数的情况下,在方程(8-10)中所示在一个OFDM符号之前的数据被插值。按照上述的相同方式,当形成p=4,q+b≥4方程(8-13)的范围,因此,需要使用多个方程,例如方程(8-9)和(8-11)。在q+b≥4的情况中,也就是说16或更大,在方程(8-16)中,在一个OFDM符号之前的数据被插值,如方程(8-11)所示。
另外,在本实施例5至7中,例如使用用于非线性失真均衡的系数估计器中FFT电路502的输出的每两个点中的一个点来设置一个代表值。然后,通过使用方程(5-17)作为插值方程,使剩余的一个点被插值。
但是,系数h1和h3被用于设置如下方程:
X3 O(1)=h1X3 O(0),X3 O(3)=h3X3 O(2)…方程(8-17)
系数h1和h3是用于获得如下方程的数值(用于线性插值的系数)。
h1X3 O(0):X3 O(0)和X3 O(2)的平均值
h3X3 O(2):X3 O(2)和X3 1(2)的平均值
在用于补偿第三阶失真的m=3的情况下,当FFT变换的点数为L时设置如下方程,c为大于等于2的整数,q大于等于0并且不大于c-1的整数,以及r为大于等于-(c-1)并且不大于0的整数。
X3 g((p-1)c+q+b)=hgpbX3 g((p-1)c+q)(p=2,3,…,(L/c-1))…方程(8-18)
X3 g((p-1)c+q+b)=hgpbX3 g((p-1)c+q)(p=1和q+b≥0)…方程(8-19)
X3 g((p-1)c+q+b)=hgpbX3 g((p-1)c+q)(p=L/c和q+b≤c-1)…方程(8-20)
X3 g-1(L+q+b)=hgpbX3 g((p-1)c+q)(p=1和q+b≤-1)…方程(8-21)
X3 g+1(q+b)=hgpbX3 g((p-1)c+q)(p=L/c和q+b≥c)…方程(8-22)
(b=r,r+1,...,r+(c-1))
系数hgpb可以用这样的方式在方程(8-1)至(8-5)中倍乘。对于该系数值,例如相邻的代表值可以用于获得线性差值。
当以L=16和c=4为例,获得如下方程:
X3 g(4(p-1)+q+b)=hgpbX3 g(4(p-1)+q)(p=2,3)…方程(8-23)
X3 g(4(p-1)+q+b)=hgpbX3 g(4(p-1)+q)(p=1和q+b≥0)…方程(8-24)
X3 g(4(p-1)+q+b)=hgpbX3 g(4(p-1)+q)(p=4和q+b≤3)…方程(8-25)
X3 g-1(16+q+b)=hgpbX3 g(4(p-1)+q)(p=1和q+b≤-1)…方程(8-26)
X3 g+1(q+b)=hgpbX3 g(4(p-1)+q)(p=4和q+b≥4)…方程(8-27)
(b=r,r+1,...,r+3)
系数hgpb可以用上述方式在方程(8-7)至(8-11)中倍乘。对于该系数值,例如相邻的代表值可以用于获得线性差值。
另外,在本实施例5至7中,例如根据方程(5-18),使用用于非线性失真均衡的系数估计器的FFT电路502的输入的每两个点中的一个点,以对1/2的点数执行FFT变换,从而获得一个代表值。另外,通过使用方程(5-19)作为一个插值方程,剩余的一个点被插值。但是,这仅仅是一个例子。
在用于补偿第三阶失真的m=3的情况中,当FFT变换的点数为L时设置如下方程,c为大于等于2的整数,q为大于等于0并且不大于c-1的整数,以及r为大于等于-(c-1)并且不大于0的整数。
X3 g((p-1)c+q)’=∑s=1toL/cX3(T+gL+(s-1)c+q)WL/c (p-1)(s-1)
WL/c=e-j2pie/(L/c)(p=1,2,…,L/c)…方程(8-28)
对于上述FFT的输入的每c个点中的一个点被使用,以执行1/c点数的FFT变换,从而获得一个代表值。在这种情况中获得如下方程:
X3 g((p-1)c+q+b)’=X3 g((p-1)c+q)’(p=2,3,…,(L/c-1))…方程(8-29)
X3 g((p-1)c+q+b)’=X3 g((p-1)c+q)’(p=1和q+b≥0)…方程(8-30)
X3 g((p-1)c+q+b)’=X3 g((p-1)c+q)’(p=L/c和q+b≤c-1)…方程(8-31)
X3 g-1(L+q+b)’=X3 g((p-1)c+q)’(p=1和q+b≤-1)…方程(8-32)
X3 g+1(q+b)’=X3 g((p-1)c+q)’(p=L/c和q+b≥c)…方程(8-33)
(b=r,r+1,…,r+(c-1))
按照这样一种方式,剩余的(c-1)个点可以被插值为该代表值。以L=16和c=4的一种情况为例,获得如下方程:
X3 g(4(p-1)+q+b)’=X3 g(4(p-1)+q)’(p=2,3)…方程(8-34)
X3 g(4(p-1)+q+b)’=X3 g(4(p-1)+q)’(p=1和q+b≥0)…方程(8-35)
X3 g(4(p-1)+q+b)’=X3 g(4(p-1)+q)’(p=4和q+b≤3)…方程(8-36)
X3 g-1(16+q+b)’=X3 g(4(p-1)+q)’(p=1和q+b≤-1)…方程(8-37)
X3 g+1(q+b)’=X3 g(4(p-1)+q)’(p=4和q+b≥4)…方程(8-38)
(b=r,r+1,...,r+3)
仅仅通过把图88至95中的X3 g(k)替换为X3 g(k)’即可获得方程(8-34)至(8-38)的插值方程。
另外,在本实施例5至7中,例如使用用于非线性失真均衡的系数估计器的FFT电路502的输入的每两个点中的一个点,来执行1/2点数的FFT变换,从而获得一个代表值。另外,在这种结构中,其中剩余的一个点被插值为上述代表值,使用方程(5-19)作为该插值方程。
但是,可以设置系数h1和h3以获得如下方程:
X3 o(1)’=h1X3 O(0)’,X3 O(3)’=h3X3 O(1)’…方程(8-39)
在上述方程的情况中,用于执行线性插值的如下数值假设为该系数值。
h1X3O(0)’:X3 0(0)’和X3 0(2)’的平均值
h3X3 O(1)’:X3 0(2)’和X3 1(0)’的平均值
在用于补偿第三阶失真的m=3的情况中,当FFT变换的点数为L,c为大于等于2的整数,q为大于等于0并且不大于c-1的整数,以及r为大于等于-(c-1)并且不大于0的整数时,设置如下方程:
X3 g((p-1)c+q+b)’=hgpbX3 g((p-1)c+q)’(p=2,3,…,(L/c-1))…方程(8-40)
X3 g((p-1)c+q+b)’=hgpbX3 g((p-1)c+q)’(p=1和q+b≥0)…方程(8-41)
X3 g((p-1)c+q+b)’=hgpbX3 g((p-1)c+q)’(p=L/c和q+b≤c-1)…方程(8-42)
X3 g-1(L+q+b)’=hgpbX3 g((p-1)c+q)’(p=1和q+b≤-1)…方程(8-43)
X3 g+1(q+b)’=hgpbX3 g((p-1)c+q)’(p=L/c和q+b≥c)…方程(8-44)
(b=r,r+1,...,r+(c-1))
可以按照这样一种方式在方程(8-29)至(8-33)中倍乘该系数hgpb。
相邻的代表值例如被用作为执行线性插值的系数值。
作为一个例子,假设L=16和c=4的情况,从而形成如下方程:
X3 g(4(p-1)+q+b)’=hgpbX3 g(4(p-1)+q)’(p=2,3)…方程(8-45)
X3 g(4(p-1)+q+b)’=hgpbX3 g(4(p-1)+q)’(p=1和q+b≥0)…方程(8-46)
X3 g(4(p-1)+q+b)’=hgpbX3 g(4(p-1)+q)’(p=4和q+b≤3)…方程(8-47)
X3 g-1(16+q+b)’=hgpbX3 g(4(p-1)+q)’(p=1和q+b≤-1)…方程(8-48)
X3 g+1(q+b)’=hgpbX3 g(4(p-1)+q)’(p=4和q+b≥4)…方程(8-49)
(b=r,r+1,...,r+3)
因此可以在方程(8-34)至(8-38)中倍乘该系数hgpb。
另外,在本实施例5至7中,通过把估计函数J(a3)定义为方程(1-5)获得该系数更新方程。显然,该系数更新方程随着估计方程J(a3)的改变而改变,如下关系本质上等价于实施例5至7中的情况。
在实施例5中,对于方程(1-5)的估计函数J(a3)获得系数更新方程(5-8)。在这种情况中,估计函数J(a3)被定义如下:
J(a3)=|e(n)·H(k)|2…方程(8-50).
在这种情况中,系数更新方程如下给出:
a3(n+1)=a3(n)+u[e(n)·H(k)]·[FFT(x3(n))]* …方程(8-51)。
另外,估计函数J(a3)被定义如下:
J(a3)=|IFFT(e(n)·H(k))|2 …方程(8-52)
在上述方程中,IFFT(e(n)·H(k))表示(e(n)·H(k))的FFT变换。这种情况下的系数更新方程如下给出:
a3(n+1)=a3(n)+u·IFFT(e(n)·H(k))x3(n)* …方程(8-53)
在实施例6中,对于方程(1-5)的估计函数J(a3)获得系数更新方程(6-6)。在这种情况中,估计函数J(a3)被定义如下:
J(a3)=|e(n)·f(n-L)|2…方程(8-54).
在这种情况中,系数更新方程如下给出:
a3(n+1)=a3(n)+u[e(n)·f(n-L)]·[FFT(x3(n))]* …方程(8-55).
另外,估计函数J(a3)被定义如下:
J(a3)=|IFFT(e(n)·f(n-L))|2 …方程(8-56).
这种情况中,系数更新方程如下给出:
a3(n+1)=a3(n)+u·IFFT(e(n)·f(n-L))x3(n)* …方程(8-57).
在实施例7中,对于方程(1-5)的估计函数J(a3)获得系数更新方程(7-6)。这种情况中,估计函数J(a3)被定义如下:
J(a3)=|e(n)/f(n-L)*|2…方程(8-58).
在这种情况中,系数更新方程如下给出:
a3(n+1)=a3(n)+u[e(n)/f(n-L)*]·[FFT(x3(n))]* …方程(8-59).
另外,估计函数J(a3)被定义如下:
J(a3)=|IFFT(e(n)/f(n-L)*)|2 …方程(8-60).
这种情况中,系数更新方程如下给出:
a3(n+1)=a3(n)+u·IFFT(e(n)/f(n-L)*)x3(n)* …方程(8-61).
另外,在上述实施例中的非线性均衡方法可以存储在一个可编程存储器中,并且可以通过使用CPU实时地执行该非线性均衡方法,从而可以实现本发明的目的。
使用计算器模拟检测本发明的效果。允许一个OFDM-16QAM信号(1024个载波)通过一个非线性放大器,其中16QAM用于初始调制,在该非线性放大器在饱和区域中工作的情况中改变补偿,从而通过调节步长参数μ,执行平均误码率的测量。
而在C/N=17dB的模拟结果在图96中示出。该模拟结果表示当没有通过非线性均衡处理的补偿以防止由于非线性失真所造成的误码率变差时,回退(back off)大约为15dB,当通过非线性均衡处理进行补偿时,回退大约为5dB。如上文所述,本发明的结构可以把回退减小10dB。
应当知道,尽管已经参照优选实施例描述了本发明,但是本领域的专业技术人员可以设想出各种其它实施例和变型,这在本发明的范围和精神之内,并且这种其它实施例和变型被所附权利要求所覆盖。