BR112016011555B1 - Método e sistema para definir e predizer trajetória de aeronaves - Google Patents
Método e sistema para definir e predizer trajetória de aeronaves Download PDFInfo
- Publication number
- BR112016011555B1 BR112016011555B1 BR112016011555-4A BR112016011555A BR112016011555B1 BR 112016011555 B1 BR112016011555 B1 BR 112016011555B1 BR 112016011555 A BR112016011555 A BR 112016011555A BR 112016011555 B1 BR112016011555 B1 BR 112016011555B1
- Authority
- BR
- Brazil
- Prior art keywords
- trajectory
- predicted
- aircraft
- trajectories
- merit
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 82
- 238000012545 processing Methods 0.000 claims description 35
- 239000006185 dispersion Substances 0.000 claims description 16
- 239000000446 fuel Substances 0.000 claims description 13
- 230000001133 acceleration Effects 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 3
- 230000008569 process Effects 0.000 description 30
- 238000013459 approach Methods 0.000 description 23
- 230000033001 locomotion Effects 0.000 description 20
- 238000007726 management method Methods 0.000 description 17
- 230000006870 function Effects 0.000 description 16
- 230000003993 interaction Effects 0.000 description 13
- 239000013598 vector Substances 0.000 description 9
- 238000004458 analytical method Methods 0.000 description 7
- 230000008901 benefit Effects 0.000 description 7
- 238000009472 formulation Methods 0.000 description 7
- 239000000203 mixture Substances 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 230000007613 environmental effect Effects 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 4
- QEBNVGLWXKVRJR-UHFFFAOYSA-N 2-(4,5-dimethyl-1,3-diselenol-2-ylidene)-5,6-dihydro-[1,3]dithiolo[4,5-b][1,4]dithiine Chemical compound [Se]1C(C)=C(C)[Se]C1=C1SC(SCCS2)=C2S1 QEBNVGLWXKVRJR-UHFFFAOYSA-N 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 230000000739 chaotic effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000001141 propulsive effect Effects 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000000342 Monte Carlo simulation Methods 0.000 description 1
- 208000027137 acute motor axonal neuropathy Diseases 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000012812 general test Methods 0.000 description 1
- 239000012464 large buffer Substances 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 238000005293 physical law Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 238000007670 refining Methods 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000010206 sensitivity analysis Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012066 statistical methodology Methods 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0047—Navigation or guidance aids for a single aircraft
- G08G5/0052—Navigation or guidance aids for a single aircraft for cruising
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
- G06Q10/047—Optimisation of routes or paths, e.g. travelling salesman problem
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/003—Flight plan management
- G08G5/0034—Assembly of a flight plan
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0073—Surveillance aids
- G08G5/0091—Surveillance aids for monitoring atmospheric conditions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0095—Aspects of air-traffic control not provided for in the other subgroups of this main group
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Human Resources & Organizations (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- Aviation & Aerospace Engineering (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Marketing (AREA)
- Theoretical Computer Science (AREA)
- Operations Research (AREA)
- Game Theory and Decision Science (AREA)
- Entrepreneurship & Innovation (AREA)
- Quality & Reliability (AREA)
- Development Economics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Automation & Control Theory (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Primary Health Care (AREA)
- Traffic Control Systems (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Navigation (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
método e sistema para definir e predizer trajetória de aeronaves. o método da presente invenção compreende adquirir dados de entrada tanto de características de desempenho de aeronave, quanto de dados atmosféricos, e definir parâmetros de trajetória aos quais a trajetória de aeronave deve estar sujeita, o método compreendendo adicionalmente definir parâmetros de trajetória de aeronave; adquirir uma pluralidade de grupos de previsão atmosférica; calcular uma trajetória predita de cada previsão atmosférica de um grupo de previsão atmosférica, a dita trajetória predita tendo informação associada a respeito de certa figura de mérito da trajetória de aeronave, em que um grupo de trajetórias preditas é obtido de cada grupo de previsão atmosférica, cada trajetória predita do grupo de trajetórias preditas tendo uma probabilidade associada derivada da probabilidade de cada previsão atmosférica dentro de um grupo de previsão atmosférica; o sistema da presente invenção compreendendo todo o equipamento necessário para executar o método da presente invenção.
Description
[001] A presente invenção, como expressa no título deste relatório, refere-se a um método e sistema associado para definir e predizer trajetórias mais adequadas de aeronaves durante um voo, cada uma das ditas trajetórias de aeronave realizando mais adequadamente uma figura de mérito predeterminada previamente estabelecida por um gerenciador de voo localizado a bordo ou fora da aeronave, o dito gerenciador de voo sendo uma pessoa ou uma máquina. Ela é especialmente aplicável na indústria eletrônica e de aviônica, e no campo de Gerenciamento de Tráfego Aéreo.
[002] Definição de trajetória de aeronave é uma importante tarefa que gerenciadores de voo têm que enfrentar para atingir algumas metas programadas relacionadas a certas figuras de mérito (FOMs).
[003] Ao estabelecer que trajetória de aeronave deve ser considerada a melhor para um voo entre duas posições geográficas, não há critério único para definir qual é “a melhor trajetória”, existindo, desse modo, diversos critérios de acordo com os quais, diferentes trajetórias de aeronave devem ser simultaneamente consideradas “a melhor”, isto dependendo de qual meta deve ser considerada o alvo principal a ser atingido por certo voo.
[004] Estas metas, também chamadas de “Figuras de Mérito” (FOMs), são definidas em termos de economia de custo, economia de tempo, economia de distância, ou qualquer tarefa que um gerenciador de voo precise estabelecer.
[005] Por conseguinte, parece óbvio que uma trajetória de aeronave que deva ser considerada a melhor em termos de economia de tempo para um voo entre duas posições geográficas, poderá não ser a melhor em termos de economia de custo, e vice-versa.
[006] O problema de escolher a trajetória mais adequada de acordo com a FOMM a ser otimizada aumenta sua complexidade ao se levar em conta as condições atmosféricas nos diferentes segmentos da trajetória de voo na qual a aeronave deverá voar.
[007] Condições atmosféricas podem afetar substancialmente o desempenho da aeronave durante o voo e a obtenção das metas propostas e, desse modo, é extremamente conveniente, quando não compulsória, evitar áreas nas quais tempestades ou fortes ventos são previstos, ou pelo menos ser capaz de determinar por qual extensão estes aspectos meteorológicos afetam a obtenção de certas FOMs em certas trajetórias.
[008] Em vista disso, gerenciadores de voo levam correntemente em consideração condições atmosféricas de uma maneira determinística, ou seja, eles analisam uma única previsão que seja considerada válida para uma grande região e por um longo período de tempo não tirando vantagem, desse modo, de previsões de modelo numérico correntemente disponíveis, que contemplam diferentes previsões possíveis, consignando a cada das ditas previsões certa probabilidade.
[009] A incerteza associada à previsão atmosférica é considerada como sendo a maior fonte de incerteza influenciando a definição e predição da trajetória de aeronave durante um voo.
[0010] Ou seja, se procuramos saber que trajetória deve a ser a melhor em termos de economia de custo (a mais barata), e não considerarmos diversos cenários meteorológicos, então, a incerteza em uma trajetória escolhida como a com certeza mais barata é grande.
[0011] Portanto, há problema corrente em gerenciador de voo no gerenciamento de muitas fontes de incerteza de modo a reduzir a incerteza associada às mesmas, evitando a dispersão de incerteza para as trajetórias preditas.
[0012] A presente invenção trata do problema mencionado pela utilização de uma linguagem de descrição inédita (ou seja, Linguagem de Descrição de Intenção de Aeronave, AIDL (em inglês)) para definir com precisão todos os parâmetros referentes à definição e descrição de trajetória, suprimindo, desse modo, uma fonte de incerteza na descrição de trajetória, que é a incerteza associada à definição de trajetória. Esta linguagem já está definida na patente WO 2009/42.405.
[0013] A presente invenção refere-se a um método que, usando a linguagem de descrição mencionada, determina todos os parâmetros que são considerados para definir e predizer trajetória de aeronave, e cria um conjunto de variáveis estocásticas a partir de cada um dos parâmetros determinados, calculando, subsequentemente, uma trajetória para a e que melhor satisfaz uma dada Figura de Mérito (FOM), a partir de cada conjunto de variáveis estocásticas.
[0014] Os parâmetros descritos pela linguagem de descrição (AIDL) dos quais um conjunto de variáveis estocásticas deve ser criado compreendem, entre outros: parâmetros meteorológicos e parâmetros de desempenho de aeronave.
[0015] Pela implementação do método da presente invenção, um conjunto de trajetórias possíveis, cada uma considerando um cenário diferente, com uma incerteza associada, é definido. Por conseguinte, a incerteza associada a cada trajetória calculada é precisamente determinada (ou seja, a incerteza com que cada trajetória calculada satisfaz uma certa FOM), enquanto uma trajetória robusta que melhor satisfaz uma dada FOM é assegurada.
[0016] O método descrito no presente pedido de patente é útil para auxiliar o gerenciador de voo a decidir qual trajetória é a mais apropriada, dadas certas condições meteorológicas e de aeronave. O método da presente invenção deve ser implementado com uma ferramenta de suporte de decisão (DST) que ajude um gerenciador de voo a tomar decisões. Em alguns casos, (ou seja, ao se considerar UAVs), é a própria DST que toma a decisão de qual das trajetórias calculadas escolher.
[0017] A presente invenção refere-se ainda a um sistema compreendendo todo o equipamento necessário para implementar o método da presente invenção.
[0018] Como introduzido, a presente invenção refere-se a um método para definir e predizer trajetórias de aeronaves, para uso em gerenciamento de voo de uma aeronave, que compreende: a. adquirir dados de entrada tanto de características de desempenho de aeronave, quanto dados atmosféricos, e b. definir parâmetros de trajetória aos quais a trajetória de aeronave deve ser sujeita, em que - parâmetros de trajetória de aeronave são definidos por meio de uma Linguagem de Descrição de Intenção de Aeronave, que é constituída por sinais específicos, em que cada segmento da trajetória de aeronave é descrito por cada sinal da Linguagem de Descrição de Intenção de Aeronave, em que cada combinação específica de sinais da Linguagem de Descrição de Intenção de Aeronave descreve completamente toda uma trajetória; - dados atmosféricos são adquiridos em forma de uma pluralidade de grupos de previsão atmosférica, cada previsão atmosférica dentro de um grupo de previsão atmosférica expressando um determinado cenário meteorológico com uma probabilidade associada; em que o método compreende adicionalmente: c. calcular uma trajetória predita a partir de cada previsão atmosférica de um grupo de previsões atmosféricas, a dita trajetória predita tendo informação associada a respeito de determinada figura de mérito da trajetória de aeronave; em que um grupo de trajetórias preditas é obtido de cada grupo de previsões atmosféricas, cada trajetória predita do grupo de trajetórias preditas tendo uma probabilidade associada derivada da probabilidade de cada previsão atmosférica dentro de um grupo de previsão atmosférica, e: d. utilizar uma trajetória predita selecionada em gerenciamento de voo de uma aeronave em pelo menos um segmento de um voo.
[0019] O método descrito na presente invenção compreende adicionalmente: a. selecionar uma figura de mérito específica de cada trajetória predita de aeronave; b. determinar, para cada trajetória predita dentro de um grupo de trajetórias preditas, o valor da figura de mérito selecionada; c. calcular, de acordo com um critério estatístico predeterminado, um valor estatístico representando, de acordo com a figura de mérito selecionada, todas as trajetórias preditas dentro de cada grupo de trajetórias preditas; d. determinar a trajetória predita, de cada grupo de trajetórias preditas, cujo valor para a figura de mérito selecionada é mais aproximado ao valor estatístico previamente calculado da figura de mérito selecionada; e. calcular, de acordo com um critério estatístico predeterminado, a dispersão de valores da figura de mérito selecionada, com relação ao valor estatístico calculado da figura de mérito selecionada para todas as trajetórias preditas de cada grupo de trajetórias preditas.
[0020] Além disso, o método para definir e predizer trajetórias de aeronaves compreende selecionar uma trajetória predita, dentre as trajetórias preditas calculadas, a dita trajetória predita selecionada que melhor satisfaz os critérios de seleção de trajetória predita.
[0021] Em uma modalidade preferida, cada um dos ditos sinais específicos da Linguagem de Descrição de Intenção de Aeronave é constituído pela combinação de pelo menos três restrições de trajetória e quarto instruções de configuração, em que todos os graus de liberdade da trajetória de aeronave são enfrentados pela imposição de três restrições de trajetória, desse modo, a trajetória de aeronave sendo completamente definida pela imposição de três restrições de trajetória, estas restrições sendo selecionadas dentre, pelo menos as seguintes:
[0022] - longitude; - latitude; - altitude; - velocidade real do ar; - rumo; - aceleração; - ângulo de trajeto; - ângulo de inclinação; - hipersustentação; - freios de velocidade. Por sua vez, cada figura de mérito é selecionada, de preferência, dentre pelo menos: - combustível queimado; - hora de chegada à posição determinada; - índice de custo; - faixa de distância horizontal coberta; - Posição 2D em hora determinada; - posição 2D em uma posição determinada; - Posição 2D sobre um segmento de trajetória; - altitude em determinado instante; - altitude em posição determinada; - altitude sobre um segmento de trajetória; - Posição 3D em determinado instante; - Posição 3D em posição determinada; - Posição 4D sobre um segmento de trajetória; - velocidade em uma posição determinada; - velocidade sobre um segmento de trajetória; - altitude em posição determinada; - altitude sobre um segmento de trajetória; - vórtice de esteira em determinado instante; - vórtice de esteira em posição determinada.
[0023] A presente invenção refere-se ainda a um sistema para definir e predizer trajetória de aeronave, para uso em gerenciamento de voo de uma aeronave, em que o sistema compreende: a. uma unidade processadora, para calcular trajetórias preditas para cada segmento de um voo de aeronave utilizando uma Linguagem de Descrição de Intenção de Aeronave específica, cada trajetória predita calculada sendo calculada com base em dados estocásticos de entrada, cada trajetória predita calculada, portanto, sendo estocástica e tendo uma probabilidade associada, os dados de entrada selecionados dentre pelo menos os seguintes: - parâmetros de Modelo de Desempenho de Aeronave; - previsões atmosféricas; uma unidade de Serviço Meteorológico Digital, sendo configurada para prover a unidade processadora para calcular trajetórias preditas com a entrada de um grupo de previsões atmosféricas; uma unidade de Ferramenta de Suporte de Decisão robusta, sendo configurada para; - prover a unidade processadora para calcular trajetórias preditas com dados de entrada necessários para predizer trajetórias, e, - selecionar uma trajetória predita dentre as trajetórias preditas calculadas pela unidade processadora para calcular trajetórias preditas; em que a trajetória predita selecionada é utilizada por um sistema de gerenciamento de voo na guia de uma aeronave em pelo menos um segmento de um voo.
[0024] Em uma modalidade preferida, a unidade de Serviço Meteorológico Digital define: a- um domínio de modelo atmosférico incluindo um ou mais parâmetros que definem uma região envolvendo o volume de espaço aéreo na qual a trajetória de voo está situada; b- um modelo atmosférico provendo múltiplos cenários atmosféricos de parâmetros atmosféricos relevantes para o espaço aéreo, os ditos cenários formando grupos de previsões atmosféricas.
[0025] Além disso, em uma modalidade preferida, a unidade de Ferramenta de Suporte de Decisão robusta define: a- uma trajetória de voo predeterminada incluindo um ou mais parâmetros que definem a trajetória de voo, por meio de imposição de uma combinação de três parâmetros de restrição de trajetória de cada segmento de trajetória de voo; b- um Modelo de Desempenho de Aeronave incluindo um ou mais parâmetros que definem resposta de aeronave sob condições externas; c- parâmetros relativos às condições iniciais de aeronave no início de um segmento de trajetória de voo; d- um conjunto de parâmetros definindo pelo menos uma figura de mérito de uma trajetória predita calculada pela unidade processadora para calcular trajetórias preditas; e- pelo menos um critério para a escolha de uma trajetória predita dentre pelo menos um grupo de trajetórias preditas calculadas pela unidade processadora para calcular trajetórias preditas, este pelo menos um critério baseado na busca de que trajetória predita melhor representa um valor estatístico central de determinada figura de mérito; f- pelo menos um critério para o cálculo de uma incerteza associada com a qual uma trajetória predita escolhida representa um valor estatístico central de determinada figura de mérito.
[0026] A unidade processadora para calcular as trajetórias preditas: - determina um conjunto de parâmetros dentre os parâmetros de entrada providos pela unidade de Ferramenta de Suporte de Decisão robusta, que são considerados estocásticos, este conjunto de parâmetros, portanto, sendo sujeito a incerteza; - determina tipo e faixa de incerteza do conjunto estocástico de parâmetros.
[0027] A unidade processadora para calcular trajetórias preditas: a. determina, com base nos parâmetros para o modelo atmosférico, Modelo de Desempenho de Aeronave, descrição de trajetória, e condições iniciais, um conjunto de dados representando uma trajetória predita; b. adjudica valores, com respectivas faixas de incerteza, aos parâmetros a serem feitos estocásticos, para criar uma pluralidade de casos possíveis do conjunto de dados representar a trajetória predita; c. calcula, com base no grupo de previsões atmosféricas, um grupo de trajetórias preditas, cada trajetória predita calculada baseada em um correspondente cenário de atmosfera; d. avalia pelo menos uma figura de mérito de cada trajetória predita dentro de um grupo de trajetórias preditas, que representa um valor central da pelo menos uma figura de mérito avaliada; e. identifica, de acordo com certo critério estatístico, uma trajetória predita dentro de cada conjunto de trajetórias preditas, que representa um valor central da pelo menos uma figura de mérito avaliada f. obtém, de acordo com certo critério estatístico, uma dispersão dos valores da pelo menos uma figura de mérito avaliada, associada às trajetórias restantes do grupo de trajetórias preditas, com relação à trajetória predita identificada na fase anterior.
[0028] A unidade processadora para calcular trajetórias preditas compreende, de preferência, pelo menos: a. uma unidade de motor de personalização, para adjudicar valores aos parâmetros a se tornarem estocásticos, recebidos da unidade de Serviço Meteorológico Digital probabilístico e da unidade de Ferramenta de Suporte de Decisão robusta; b. uma unidade de computação de trajetória, para calcular trajetórias preditas baseada nos dados de entrada providos pela unidade de motor de personalização.
[0029] Os ditos dados de entrada são, de preferência, selecionados de pelo menos os seguintes: - Parâmetros de Modelo de Desempenho de Aeronave; - Parâmetros de descrição de trajetória; - Figuras de mérito predeterminadas; - Critérios de seleção de trajetória; - Previsões atmosféricas.
[0030] A unidade de Ferramenta de Suporte de Decisão robusta é configurada para prover a unidade processadora para calcular trajetórias preditas com entrada de: - Parâmetros de Modelo de Desempenho de Aeronave; - Parâmetros de descrição de trajetória; - Figuras de mérito selecionadas, e - Critérios de seleção de trajetória.
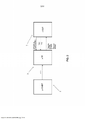
[0031] Figura 1: mostra um fluxograma descrevendo todas as diferentes fases compreendidas no método da invenção.
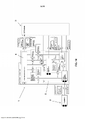
[0032] Figura 2: mostra um diagrama de bloco simplificado ilustrando os principais elementos do sistema da presente invenção.
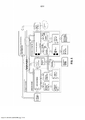
[0033] Figura 3: mostra um diagrama de bloco mais detalhado, focalizando nos elementos principais que constituem a unidade de predição de trajetória estocástica (s-TP) mostrada na figura 2.
[0034] Figura 4: mostra interações distribuídas de homem-máquina e moções de trajetória envolvidas no ciclo de vida de trajetória.
[0035] Figura 5: mostra elementos principais e incertezas envolvidos no processo de TP suportando a operação de um DST.
[0036] Figura 6: mostra operação de um DST suportado por predição de trajetória baseada em AIDL.
[0037] Figura 7: mostra modelo de trajetória de amostra em termos de AIDL (BR&TE).
[0038] Figura 8: mostra campos 4D típicos que caracterizam um cenário atmosférico usado em TP (INSA).
[0039] Figura 9: mostra expansão probabilística de trajetórias preditas “possíveis” baseadas em um grupo meteorológico.
[0040] Figura 10: mostra operação robusta de um DST suportado por TP estocástico baseado em AIDL.
[0041] Figura 11: mostra elementos chave envolvidos.
[0042] Figura 12: mostra uma representação gráfica de erros de TP geométricos.
[0043] Figura 13: mostra sistemas de referência envolvidos na formulação de problema de movimento de AV.
[0044] Figura 14: mostra uma arquitetura de cama de teste lógica de alto nível e interfaces.
[0045] Figura 15: tabela mostrando variáveis envolvidas na formulação de problema de movimento de AV.
[0046] Figura 16: tabela mostrando formulação das forças (ações) que aciona movimento de AV.
[0047] Figura 17: tabela mostrando formulação dos aspectos ambientais envolvidos no movimento de AV.
[0048] Figura 18: tabela mostrando aspectos de trajetória considerados em TP baseado em AIDL.
[0049] Figura 19: tabela mostrando posições envolvidas em definições de erro de TP.
[0050] Figura 20: tabela mostrando erros de TP 4D.
[0051] Figura 21: tabela mostrando erros de TP em atitude, velocidade e massa.
[0052] Figura 22: tabela mostrando erros de AM em pressão, temperatura e vento.
[0053] Figura 23: tabela mostrando aplicações, funções e aspectos relativos a trajetórias.
[0054] FIGURA 24a, 24b: tabelas mostrando uma pesquisa de FOMs de interesse corrente/potencial para DSTs representativas baseadas em trajetória
[0055] Figura 25: tabela mostrando FOMs representativas que descrevem mérito no ponto final de uma única trajetória.
[0056] Figura 26: tabela mostrando critérios típicos de seleção de trajetória para derivar uma medida central de populações de FOM.
[0057] Figura 27: tabela mostrando medidas estatísticas típicas de dispersão de FOM.
[0058] Figura 28: tabela mostrando FOMs representativas que descrevem mérito de toda trajetória.
[0059] Figuras 29a, 29b: tabelas mostrando interações entre r-DST e S-TP.
[0060] Figuras 30a, 30b: tabelas mostrando interações entre RE e a infraestrutura de TC subjacente.
[0061] Figura 31: tabela mostrando interações entre os componentes internos da infraestrutura de TC.
[0062] Figura 32: tabela mostrando interações entre P-DMET e a infraestrutura de TC.
[0063] Segue-se uma descrição de uma modalidade da invenção fazendo referência às figuras.
[0064] A figura 1 mostra um fluxograma descrevendo as diferentes fases compreendidas no método da invenção.
[0065] De acordo com um aspecto da presente invenção, uma modalidade exemplificativa de um método é descrita para definir e predizer trajetórias de aeronaves, para uso em gerenciamento de voo de uma aeronave. O método compreende adquirir dados de entrada tanto de características de desempenho de aeronave (Aircraft Performance Model, APM), quanto de dados atmosféricos (Atmospheric Forecast Ensemble, AFE), e definir parâmetros de trajetória aos quais a trajetória de aeronave deve estar sujeita. O método compreende definir parâmetros de traja por meio de uma Linguagem de Descrição de Intenção de Aeronave (AIDL), a qual [e constituída por sinais específicos, em que cada segmento da trajetória de aeronave é descrito por cada sinal da Linguagem de Descrição de Intenção de Aeronave (AIDL), em que cada combinação específica de sinais da Linguagem de Descrição de Intenção de Aeronave (AIDL) descreve toda uma trajetória.
[0066] O método compreende adquirir uma pluralidade de grupos de previsão atmosférica (AFEs), cada previsão atmosférica dentro de um grupo de previsão atmosférica (AFE) expressando um determinado cenário meteorológico com uma probabilidade associada.
[0067] O método compreende calcular uma trajetória predita de cada previsão atmosférica de um grupo de previsão atmosférica (AFE). A trajetória predita tem informação associada a respeito de certa figura de mérito (FOM) da trajetória, em que um grupo de trajetórias preditas é obtido de cada grupo de previsão atmosférica (AFE). Cada trajetória predita do grupo de trajetórias preditas tem uma probabilidade associada derivada da probabilidade de cada previsão atmosférica dentro de um grupo de previsão atmosférica (AFE). O método inclui ainda utilizar uma trajetória predita selecionada em gerenciamento de voo de uma aeronave em pelo menos um segmento de voo.
[0068] De acordo com o método da presente invenção, um grupo de previsões atmosféricas é produzido por uma unidade de Serviço Meteorológico Digital probabilística (2), p-DMET. Cada previsão meteorológica ilustra determinado cenário meteorológico, todas as previsões meteorológicas dentro do grupo (AFE) tendo determinada probabilidade associada. Em certos casos, todas as previsões meteorológicas dentro do grupo (AFE) têm a mesma probabilidade associada.
[0069] Em seguida, um conjunto de restrições é estabelecido, para cada segmento de trajetória de voo. Estas restrições são relativas a aspectos, como altura, velocidade, horas de chegada ou separação entre aeronaves.
[0070] Estas restrições sendo expressas em uma linguagem inédita, ou seja, Linguagem de Descrição de Intenção de Aeronave (AIDL), de acordo com a qual existe uma relação direta entre as restrições impostas e a trajetória de voo a ser seguida pela aeronave em cada segmento particular da trajetória.
[0071] O código AIDL estabelece que cada combinação possível das três diferentes restrições, com seus valores associados, juntamente com quatro parâmetros de configuração de movimento, constitui um símbolo alfabético particular que, de modo não ambíguo, define um segmento particular da trajetória de aeronave. Com a combinação de cada símbolo durante o voo, uma trajetória de aeronave totalmente definida é obtida para cada segmento único da trajetória de aeronave.
[0072] Desse modo, tirando vantagem desta abordagem inédita, a incerteza associada ã predição de trajetória que é causada pela incerteza associada à definição de trajetória é cancelada.
[0073] Entretanto, permanece ainda a incerteza associada à predição de trajetória (TP) que é causada pela incerteza associada tanto ao Modelo de Desempenho de Aeronave (APM), quanto à Previsão Meteorológica. Todavia, a incerteza associada à autenticidade do Modelo de Desempenho de Aeronave (APM) deve ser negligenciada quando comparada à incerteza associada à Previsão Meteorológica.
[0074] Por conseguinte, a principal solução técnica que a presente invenção apresenta é a de reduzir a incerteza associada à predição de trajetória (TP) que é causada pela incerteza associada à previsão meteorológica usada para predizer a dita trajetória.
[0075] Consequentemente, em vez de se usar uma única previsão meteorológica, um grupo de possíveis previsões meteorológicas (AFE) é obtido, cada previsão ilustrando um cenário meteorológico diferente plausível que, juntamente com o conjunto de restrições, é usada para calcular a trajetória predita.
[0076] A trajetória predita, que, de modo não ambíguo, se atém às restrições estabelecidas, é calculada por meio de um conjunto de equações que expressa a relação entre cada único aspecto referente à trajetória.
[0077] Desse modo, o ineditismo consiste em definir de modo não ambíguo a trajetória por meio de um conjunto de restrições predeterminado para cada segmento do voo, e utilizar um Grupo de Previsão Atmosférica (AFE) para calcular as trajetórias preditas.
[0078] Por conseguinte, cada segmento de trajetória predita é calculado, diretamente em termos de um dado conjunto de restrições (que elimina a necessidade de ordenar diretamente manobras de aeronave, que são implicitamente definidas pela combinação imposta de restrições). Adicionalmente, um conjunto de trajetórias preditas estocásticas é obtido, cada u resultando de cálculo de uma trajetória predita a partir de um cenário meteorológico particular, obtido do Grupo de Previsão Atmosférica (AFE).
[0079] Desse modo, um conjunto de trajetórias preditas é obtido. Cada segmento de uma trajetória predita é definido em termos de um vetor de estado, que define a posição espacial da aeronave em cada momento único, por meio de coordenadas espaciais (X(t), Y(t), Z(t), o vetor de estado definindo também alguns aspectos relativos a pelo menos consumo de combustível, hora de chegada ou separação em relação a outras aeronaves em sua proximidade.
[0080] Todos estes aspectos são chamados de Figuras de Mérito (FOMs), que um gerenciador de voo deve ter interesse em otimizar para cada caso particular.
[0081] Depois, uma FOM preferida a ser otimizada é selecionada, e as trajetórias preditas são reordenadas em termos de determinado critério estatístico referido a esta FOM.
[0082] Por exemplo, trajetórias preditas podem ser reordenadas para mostrar qual delas melhor representa (é a mais próxima ao) meio estatístico do consumo de aeronave e, depois, uma medida da dispersão para o consumo de combustível (ou para qualquer outra FOM particular) relativa à trajetória predita selecionada é obtida, a dita medida de dispersão obtida da população de FOM que corresponde ao espaço de amostra de trajetória (ou seja, o determinado grupo de trajetórias). As medidas de dispersão de FOM são selecionadas dentre, pelo menos: STD, MAE, SEE, RMS.
[0083] Desse modo, a presente invenção provê uma metodologia geral para a determinação de uma Trajetória Predita Robusta (RPT) e a população dada uma certa definição da FOM.
[0084] A presente invenção, conforme já expressa, refere-se também a um sistema de acordo com o método dito, o sistema provendo o equipamento necessário para executar o método descrito.
[0085] O sistema compreende uma unidade de serviço meteorológico digital probabilístico (2), P-DMET, que cria os grupos de previsão atmosférica (AFEs), e dá tais AFEs como uma entrada (codificada em linguagem AIDL) a uma unidade de processador principal (1) compreendida no sistema da presente invenção, que é a unidade de processamento (1) para calcular trajetórias preditas, ou seja, unidades estocásticas de predição de trajetória (s-TP).
[0086] Em uma modalidade preferida, o sistema compreende também uma unidade de ferramenta de suporte de decisão robusta (3), r-DST, que provê a unidade processadora de predição de trajetória (1), s-TP, com pelo menos três entradas principais (codificadas em linguagem AIDL), respectivamente referidas à definição de trajetória, à FOM de interesse a ser pesquisada, e ao critério estatístico sobre o qual a informação a respeito da FOM de interesse e suas incertezas associadas devem ser apresentadas.
[0087] A figura 2 mostra um diagrama de bloco simplificado ilustrando os elementos principais do sistema da presente invenção.
[0088] A figura 3, por sua vez, mostra um diagrama de bloco mais detalhado, focalizando nos elementos principais que constituem a unidade processadora de predição de trajetória estocástica (1), S-TP, e o modo da informação de entrada provida pela unidade de serviço meteorológico digital probabilístico (2), p-DMET, e a ferramenta de suporte de decisão robusta (3), r-DST, é tratada na mesma.
[0089] A unidade processadora de predição de trajetória estocástica (1), s-TP, baseia sua análise, de acordo com o método da presente invenção, na simulação Monte Ralo, através da qual s-TP é habilitada a produzir um conjunto de trajetórias estocásticas e seu tratamento estatístico. Para esta finalidade, a unidade processadora (1), s-TP. É constituída por dois componentes principais:
[0090] Unidade (4) de Motor de Personalização, RE: Este componente coordena o processo que produz o conjunto de trajetórias estocásticas resultante. O RE prepara os dados de entrada estocásticos em cada operação de computação de trajetória (TC), de acordo com certos parâmetros de incerteza predefinidos (õ), e envia estas entradas para uma unidade de computação de trajetória (5), TC, para computação das mesmas. Além disso, ela é encarregada de manusear o conjunto existente de modo a obter a trajetória predita robusta e a incerteza de sua figura de mérito associada (FOM).
[0091] Unidade (5) de Computação de Trajetória, TC: a unidade (5) de computação de trajetória, TC, é um componente que computa, de uma maneira determinística, uma trajetória para cada conjunto de dados de entrada providos pela unidade de motor de personalização (4), RE, em cada operação. A unidade de computação de trajetória (5), TC, é constituída pelos seguintes componentes: i) um Motor de Trajetória (TE), que formula e integra o conjunto de equações descrevendo o movimento do AV (veículo aéreo) durante um intervalo de interesse (Domínio de Modelo de Aeronave 4D (APM), como será explicado abaixo com mais detalhe) tomando como entrada o script de AIDL (definição de trajetória em código AIDL) e Condições Iniciais; ii) Modelo de Atmosfera Probabilístico (PAM), que substitui o cenário de atmosfera determinístico normalmente usado em abordagens de predição de trajetória convencional, TP, pela possibilidade de selecionar diferentes cenários atmosféricos de um conjunto (ou grupo) de cenários possíveis, provido pela unidade de serviço meteorológico digital probabilístico (2), p-DMET.
[0092] Segue-se uma abordagem geral aos aspectos envolvidos na presente invenção: conforme já introduzido, é essencial compreender como a incerteza associada aos dados de alimentação da unidade processadora de predição de trajetória (1), s-TP, se propaga em incertezas em aspectos específicos de interesse das trajetórias preditas. Desse modo, a presente invenção provê um aumento em eficiência e robustez de Predição de Trajetória, obtido por considerar explicitamente predições de trajetória estocásticas em vez de determinísticas para suportar execução de decisão em diferentes contextos.
[0093] Antes de tudo, é considerado muito importante compreender todo o ciclo de vida de uma trajetória de aeronave e como peças diferentes de informação de trajetória e incertezas presentes em cada estágio do processo de predição de trajetória se combinam para chegar à trajetória final (real) de cada veículo aéreo e o desempenho da solução de tráfego geral.
[0094] A figura 4 ilustra as interações complexas que ocorrem entre automação (Ferramentas de Suporte de Decisão, DSTs) e humanos em diferentes locais e instantes de tempo antes da decisão específica em como operar uma determinada aeronave seja estabelecida. Estas interações envolvem coleções mais ou menos detalhadas de requisitos de trajetória que são produzidos, trocados e refinados entre os atores envolvidos em um processo de tomar decisão colaborativo chamado de negociação de trajetória, cujo resultado final é a trajetória real voada por cada aeronave participando em certo tráfego. Os três estágios principais do ciclo de vida de trajetória de aeronave são: 1) Requisitos de trajetória: a noção de plano de voo e suas representações possivelmente diferentes (por exemplo, sequência de segmentos de rota, pontos medianos, horas estimadas de chegada - ETAs) mais as correções táticas obrigadas pelo Controle de Tráfego Aéreo (ATC) durante a execução do voo (por exemplo, velocidade ou restrições de tempo, restrições de altitude e desvios de trajeto laterais, que são coletivamente referidos como “Intenção de Voo”. 2) Decisões operacionais de aeronave: a receita específica que a automação e gerenciamento de voo ou o piloto ou a combinação de ambos aplica ao gorno da operação da aeronave, conhecida como “Intenção da Aeronave”. 3) Resultados: a trajetória real exibida pela aeronave como resultado de tal modo específico de operação (tipicamente, representado como sequência de posições distribuídas no tempo e possivelmente informação adicional, como velocidade e massa instantânea).
[0095] O suporte provido pelas correspondentes ferramentas de suporte de decisão, DSTs, a operadores humanos envolvidos no processo é, geralmente, baseado em aspectos específicos de méritos das trajetórias, como posição, tempo e consumo de combustível, que são antecipados por meio de um tipo de predição de trajetória, TP. Desse modo, o acerto das decisões feitas para organizar a solução de tráfego e, por conseguinte, o desempenho resultante em ambos os níveis individual (voo único) e agregado (tráfego) está diretamente ligado ao desempenho do processo de predição de trajetória, TP, subjacente a cada função DST.
[0096] A figura 5 ilustra um processo de predição de trajetória genérico, TP. Em termos gerais, uma ferramenta de suporte digital, DST, itera com sua infraestrutura de TP subjacente pela experimentação de um conjunto de requisitos de trajetória e de seu refinamento até que a trajetória predita resultante satisfaça as metas operacionais ajustadas pela ferramenta de suporte digital, DST.
[0097] Uma instância trivial desta ideia é o caso de um detector de conflito (DST=CD) que, dado o conhecimento disponível sobre um dado conjunto de trajetórias para cruzar posições de controle e tempos entre os mesmos para identificar perdas potenciais de separação. Um caso mais sofisticado é o de um Planejador de Voo (DST=FP) que precisa iterar (eventualmente, várias vezes) com sua infraestrutura TP para determinar uma trajetória comercial que satisfaça determinadas restrições de ATC/ATFCM (Fluxo de Tráfego Aéreo e Gerenciamento de Capacidade), enquanto os graus de liberdade restantes (DOFs) tiram vantagem de otimizar consumo de combustível ou tempo ou um comprometimento de ambos (por exemplo, custo-índice).
[0098] Em geral, o processo TP abrange dois subprocessos internos principais: Geração de Intenção e Computação de Trajetória. A geração de intenção trata da transição dos requisitos de determinada trajetória para o próximo estágio do ciclo de vida da trajetória, ou seja, a formulação de um modo específico de operar a aeronave (Intenção de Aeronave), destinada a resultar em uma trajetória que satisfaça estes requisitos.
[0099] Tipicamente, isto acarreta em um processo de otimização efetuado pelo assim chamado Motor de Intenção, que considera restrições adicionais que qualquer trajetória precisa satisfazer no determinado contexto operacional (por exemplo, Área de Gerenciamento de Terminal - TMA -, altitude mínima ou velocidade máxima, zonas interditadas a voo), bem como, objetivos/restrições que seguem preferências de usuários específicas (por exemplo, custo-índice, acelerações máximas) sempre que graus de liberdade (DOFs) estejam disponíveis.
[00100] A geração de intenção envolve, geralmente, um loop de iteração interno com o processo de computação de trajetória para descobrir a “melhor” intenção de aeronave, ou seja, aquela que satisfaz todas as restrições enquanto obtém o melhor mérito sob os objetivos aplicáveis. A computação de trajetória, por outro lado, é encarregada de computar o movimento da aeronave com características de desempenho associadas (aerodinâmica, propulsiva, limitações operacionais, configuração etc.) executando a determinada intenção de aeronave na presença de determinado cenário atmosférico (essencialmente vento, temperatura e pressão), que afeta também diretamente o desempenho característico da resposta de aeronave. Para esta finalidade, um motor de trajetória, TE, que incorpora um modelo físico do processo de voo resolve a correspondente formulação das equações de movimento baseada nos aspectos preditos de desempenho de aeronave e condições atmosféricas, respectivamente, providas pelo modelo de desempenho de aeronave subjacente (APM) e modelo de atmosfera (AM). A transição de intenção de aeronave para a trajetória predita normalmente requer um processo de integração numérico, baseado em algum conhecimento sobre o estado da aeronave no instante inicial (condições iniciais).
[00101] A figura 5 ilustra ainda as fontes de incerteza na predição de trajetória que, essencialmente se referem ao nível e fidelidade e precisão associado aos elementos de informação envolvidos por todo o processo TP descrito. De especial interesse às modalidades aqui descritas são as fontes de incerteza associadas ao processo de computação de trajetória, ou seja: i) a incerteza na definição da trajetória a ser computada como expressa pela dada Intenção de Aeronave; ii) a incerteza associada às previsões meteorológicas; iii) os indicadores de desempenho chave (KPIs) que caracterizam a qualidade dos aspectos de desempenho de aeronave envolvidos; iv) a incerteza associada à observação das condições iniciais, e v) a fidelidade do modelo de movimento usado pelo motor de trajetória (TE) para computar as trajetórias.
[00102] A introdução de um método de definição de trajetória, como a Linguagem de Descrição de Intenção de Aeronave (AIDL), que possibilita formalmente descrever a Intenção de Aeronave sem ambiguidade, torna possível se livrar de uma fonte principal de incerteza, bem como, da complexidade associada ao processo de geração de intenção. Desse modo, supondo que a ferramenta de suporte de decisão (DST) é capaz de interagir com um TP subjacente baseado em AIDL, a figura 5 se torna o esquema muito mais simples refletido na figura 6, onde a incerteza associada à intenção de aeronave não é mais uma incerteza de definição de trajetória principal, mas uma residual, associada às pequenas diferenças que podem ocorrer ao se executar na prática a definição ideal de tal intenção de aeronave capturada na AIDL (um modelo de trajetória de amostra em AIDL é mostrado na figura 7).
[00103] Acompanhando resultados de técnica anterior, o impacto de ambas incertezas de Modelo de Desempenho de Aeronave (APM) e modelo de movimento de aeronave na incerteza de predição de trajetória pode ser negligenciado em comparação ao causado pela incerteza nas predições atmosféricas.
[00104] Em geral, modelos meteorológicos são formulados em termos de equações diferenciais que descrevem o comportamento da atmosfera dentro de determinado domínio temporal e espacial caracterizado por, respectivamente, dadas condições inicial e limite. Essas equações correspondem a simplificações das leis gerais de Navier-Strokes que governam a dinâmica de fluidos (cuja natureza caótica é amplamente reconhecida), que são numericamente resolvidas através de uma discretização dos domínios de espaço e tempo. A natureza caótica do problema torna sua solução extremamente sensitiva aos aspectos a seguir, que, portanto, representam a fonte principal de incerteza na predição meteorológica: vi) 1) Definição de domínio: forma de grade, tamanho de célula, sistema de coordenadas, resolução e precisão do modelo de perfil do terreno, superfícies móveis (água) e caracterização do solo, horizonte de tempo e etapa de tempo de integração; vii) ) Modelo e solucionador: discretização espacial e temporal das equações que representam as leis físicas de mecânica de fluidos e método solucionador; viii) condições inicial/limite: condições iniciais são tomadas de melhor conhecimento corrente do status atmosférico no momento inicial, enquanto condições limite são tomadas nos limites do domínio espacial por todo o intervalo de tempo que vai do instante inicial até o instante para o qual a solução é requerida.
[00105] O esquema descrito produz uma solução determinística. A ideia de previsão estocástica introduz a noção de probabilidade nas predições. O método extensivamente usado para prover informação de incerteza às previsões meteorológicas é a geração de grupos. Um grupo (meteorológico) é um conjunto de soluções onde cada um é obtido através da execução de um ou múltiplos modelos meteorológicos baseados em diferentes dados de entrada, ou seja, um espaço finito de eventos prováveis, cada um representando um cenário possível de condições atmosféricas. Grupos permitem que agências meteorológicas provejam graus de confiabilidade associados a suas previsões. O presente método tira vantagem de uma abordagem análoga para caracterizar a incerteza associada à previsão dos parâmetros atmosféricos que sejam relevantes ao TP (ver figura 9).
[00106] A despeito do fato das fontes de incerteza na predição de trajetória serem um tanto conhecidas, a maior parte das ferramentas de suporte de decisão existentes (DSTs) é baseada em determinística, em vez de predição de trajetória estocástica, o que implica em que a incerteza de predição seja marginalmente considerada ou totalmente desprezada. Desse modo, o presente método considera qualificar e explorar incerteza de TP, o que ajuda as DSTs a obter meios desempenho operacional. Com base na explicação acima, o método utiliza a abordagem mostrada na figura 10, que estende o esquema de TP descrito o suficiente para lidar com o tratamento da incerteza. O objetivo atingido é: a) substituir o modelo atmosférico determinístico por um probabilístico (PAM, Modelo Atmosférico Probabilístico) que provê os grupos de previsão atmosférica (os ditos AFEs), e b) introduzir um componente adicional denotado como unidade de Motor de Randomização (4), RE, que possibilita uma nova iteração com a DST de cliente em termos de incerteza.
[00107] Com efeito, de modo a ser capaz de explorar a capacidade de limitar robustamente a incerteza, uma unidade (3) de DST “robusta”, r-DST, extrai da unidade processadora de Predição de Trajetória estocástica (1), s-TP, uma medida da incerteza em certo aspecto do mérito da trajetória, que é de interesse para a finalidade do comércio de DST. Por exemplo, um gerente de chegada (DST=AMAN) pode estar interessado limitar (robustamente) a incerteza da hora (de chegada), enquanto um planejador de voo (DST=FP) poderia estar interessado em limitar (robustamente) uma figura de mérito mais complexa (FOM), como o custo-índice. Para a unidade processadora (1), s- TP, produzir uma medida (robusta) da incerteza na figura de mérito (FOM) de interesse para a unidade de ferramenta de suporte de decisão (3), r-DST, a primeira exige que a última proveja uma definição de tal figura de mérito (FOM).
[00108] A primeira responsabilidade da unidade de motor de personalização (4), RE, é aprender qual FOM faz com que a unidade de ferramenta de suporte de decisão (3), r-DST, manter interesse em, e, descobrir a trajetória predita robusta que pode não ser a mais provável em resultar mais próxima à trajetória real em cada execução, mas aquela que prova fornecer a melhor FOM real no longo prazo (ou seja, considerando todo o espaço probabilístico).
[00109] A segunda responsabilidade da unidade de motor de personalização (4), RE, é descobrir a incerteza na FOM associada a esta trajetória predita robusta. Para esta finalidade, a unidade de motor de personalização (4), RE, exige uma boa interação (possivelmente iterativa) com o motor de trajetória, TE, para gerenciar todas as incertezas de entrada consideradas (meteorológicas mais, eventualmente, APM, condições iniciasse incertezas relativas à intenção de aeronave) de um modo prático, mas estatisticamente sólido.
[00110] A abordagem geral descrita na presente invenção leva à representação esquemática da figura 11, que delineia os três elementos chave (cadeia de serviços) envolvidos na automação de tomada de decisão e nas interações entre eles.
[00111] O padrão representado na figura 11 é aplicável, virtualmente, a qualquer cenário de automação de Gerenciamento de Tráfego Aéreo (ATM), caso a ferramenta de suporte de decisão (DST) seja baseada no solo ou no ar, destinado a suportar as fases de planejamento e execução e sem considerar o nível de autonomia no processo de tomada de decisão (baseado em operador ou totalmente autônomo). Como previamente introduzido, a invenção abrange ainda a metodologia estatística para avaliar a incerteza de TP, uma vez que o conjunto de trajetórias estocástico tenha sido criado após o processo de TP ter sido finalizado.
[00112] Em relação à unidade de Ferramenta de Suporte de Decisão (3), r-DST, esta unidade (3) é encarregada de determinar os dois aspectos a seguir: i) a assim chamada trajetória predita robusta (RPT), que é representativa de um valor central da população de FOM, dado certo critério de seleção de trajetória (TSC) que define este valor central (centroide), por exemplo, a média, o modo, a mediana ou determinado percentual, e ii) a população de FOM que corresponde ao espaço de amostragem de trajetória (ou seja, o dado grupo de trajetórias), do qual as medidas de dispersão de FOM, como STD, MAE, SEE ou RMS, podem ser obtidas.
[00113] Desse modo, a presente invenção provê uma metodologia geral para determinar a Trajetória Predita Robusta (RPT) e a população associada de valores de FOM (ou outra estatística de interesse), dada a definição da FOM provida pela unidade de ferramenta de suporte de decisão robusta (3), r- DST.
[00114] Mais detalhes sobre cálculo de parâmetros estatísticos e manuseio de parâmetros de incerteza são providos abaixo.
[00115] As fontes de incerteza relativas ao processo de Predição de Trajetória (TP) podem ser resumidos assim: - A incerteza na definição da trajetória a ser computada (predita); - A incerteza associada às previsões de condições atmosféricas que são relevantes à predição de trajetória, TP; - Os indicadores chave de desempenho (KPIs) que caracterizam a qualidade dos aspectos de desempenho de aeronave envolvidos na computação de trajetórias preditas; - A incerteza associada à observação das condições iniciais necessárias para inicializar o processo de computação de trajetória; - A fidelidade do modelo de movimento usado pela unidade de motor de trajetória (4), TE, para computar as trajetórias.
[00116] As DSTs mais atuais são baseadas mais em abordagens simplistas à TP, que consideram ligeiramente estas incertezas. Algumas DSTs simplesmente ignoram incerteza de TP, o que leva decisões não confiáveis. Outras simplesmente alocam grandes buffers para lidar com a incerteza desconhecida no aspecto específico de interesse, o que leva a baixo desempenho (muitas vezes inaceitável).
[00117] As principais diferenças entre soluções existentes para o problema de predição de trajetória, TP, e a solução provida pela presente invenção surgem de diferentes fontes de incerteza: 1.- A informação de entrada determinística comumente usada por DSTs existentes é substituída, no presente caso, por entradas estocásticas obtidas de diferentes fontes de incerteza; a. a previsão atmosférica determinística provida pelos serviços DMET existentes é substituída pelos grupos de previsões atmosféricas (AFEs) providos pela nova unidade de serviço meteorológico digital probabilístico (2), p-DMET. Isto possibilita a obtenção de uma medida de como a incerteza meteorológica afeta incerteza de TP. Além disso, as interfaces da nova unidade de serviço meteorológico probabilístico (2), p-DMET. Isto possibilita a obtenção de uma medida de como incerteza meteorológica afeta incerteza de TP. Além disso, as interfaces da nova unidade de serviço meteorológico digital probabilístico (2), p-DMET, foram especificamente projetadas para suportar a unidade emitente de processador de predição de trajetória estocástica (1), s-TP, para a finalidade de automação de tomada de decisão robusta. b. a entrada de definição de trajetória é também uma fonte de incerteza chave especialmente para os métodos existentes na qual a definição de trajetória depende de ambas a linguagem de definição de trajetória específica usada pela DST e a implementação de TP. Esta metodologia propões o uso dos benefícios potenciais da Linguagem de Descrição de Intenção de Aeronave (AIDL) como uma linguagem formal não ambígua para descrever trajetórias de aeronave agnósticas para implementações de TP e DST, o que permite descartar a incerteza associada à definição de trajetória. c. o resto de fontes de incerteza identificadas é menos relevante em comparação com as duas identificadas acima (previsões atmosféricas e definição de trajetória. Todavia, a metodologia possibilita que um mecanismo considere e entenda como outras incertezas menores atuam, por meio da definição de certos parâmetros de personalização que são providos pela unidade de motor de trajetória, TE, como vetores de parâmetros estocásticos associados a diferentes componentes (APM, AI, IC, AM) para a computação de trajetória corrente (õ APM, ÕAI, ÕIC, ÕAM).
[00118] O esquema de automação de sair de abordagens de tomada de decisão executadas pela cadeia convencional “DMET”- “TP”- “DST” foi realçado para estender funcionalidade na nova abordagem “p-DMET”- “s- TP”- “r-DST”: a. p-DMET: previsões atmosféricas genéricas são amplamente usadas, mas serviços especializados de previsão meteorológica personalizados para um contexto baseado em trajetória é inédito. b. s-TP: O TP estocástico em vez de determinístico suprido por previsão meteorológica probabilística é novo em Gerenciamento de Tráfego Aéreo (ATM). A interação entre a unidade processadora de predição de trajetória estocástica (1), s-TP, e unidade de ferramenta de suporte de decisão robusta (3), r-DST, em termos de FOM e incerteza relacionada nunca foi abordada.
[00119] A capacidade de gerenciar entradas de incerteza e produzir uma predição de trajetória estocástica e sua medida de incerteza em termos de FOM provê benefícios potenciais ao processo de tomada de decisão da unidade de ferramenta de suporte de decisão robusta (3), r-DST. c. r-DST: o uso de figuras de mérito (FOMs) personalizadas para caracterizar a incerteza de TP para sua exploração em suporte de decisão automatizado é novo em comparação ao estado da técnica atual, em que DSTs baseadas em TP determinístico não consideram incerteza em medias de FOM e o desempenho DST nunca foi tentado anteriormente. 3. A infraestrutura de preditor de trajetória interno de automação de suporte de decisão existente é geralmente desenvolvido para satisfazer os requisitos de uma ferramenta específica. Além disso, automação normalmente define a trajetória para computar por meio de uma “linguagem de descrição proprietária”. Desse modo, a predição de trajetória existente é baseada em uma solução que acopla a implementação de TP específico à descrição de trajetória específica de DST. O uso de um TP baseado em AIDL é também uma ideia inédita que permite desacoplar a definição de trajetória e a implementação de TP específico.
[00120] Desse modo, os presentes método e sistema são melhores do que abordagens existentes para suporte de tomada de decisão, devido a - adotar AIDL para eliminar uma fonte principal de incerteza, associada a definição de trajetória; - considerar informação adicional sobre a outra fonte principal de incerteza, ou seja, a previsão de condições atmosféricas, através da abordagem de p-DMET; - propor um esquema formal (baseado na abordagem de FOM) que é agnóstico quanto a aspectos específicos de trajetórias preditas, cuja incerteza associada é do interesse das DSTs; - aumentar a robustez do processo de tomada de decisão, devido a considerar a incerteza ao selecionar as trajetórias preditas sobre as quais decisões foram tomadas e possibilitar, adicionalmente, obter-se uma medida de tal incerteza, a qual é explorada para a tomada de decisões mais consolidadas.
[00121] A presente invenção especialmente valiosa para usuários de Espaço Aéreo e provedores de serviços de Gerenciamento de Tráfego Aéreo/Sistemas Aéreos Não tripulados (ATM/UAS) no contexto de futuros ambientes operacionais de Veículo Aéreo (AV) baseados em trajetória. Em particular, técnicas inovadoras de tomada de decisão para planejamento de voo, gerenciamento de chegada, sensoreação e prevenção e aterragem contingencial em condições de pane de motor, dentre outras, poderia explorar modelos de predição de trajetória estocásticos baseados em previsões de grupos meteorológicos de modo a se obter resultados mais robustos do que aqueles providos por processos de automação determinísticos existentes.
[00122] O método proposto pode economizar custo em grandes operações de companhias de transporte aéreo. As decisões operacionais baseadas em abordagem estocástica são mais próximas da realidade do que as baseadas em abordagens determinísticas e, portanto, é mais fácil o melhor ajuste do custo real das operações (aperfeiçoamentos operacionais significativos sem comprometer a segurança).
[00123] A seguir, é apresentada uma explicação detalhada do processo de Predição de trajetória (TP) e suas fontes de incerteza de TP associadas.
[00124] O problema matemático que permite a computação da trajetória de um Veículo Aéreo (AV) sob suposições razoáveis que constituem o sentido no Gerenciamento de TR’
[00125] Tráfego Aéreo (ATM) é convencionalmente descrito por meio da seguinte estrutura:
[00126] Equações de movimento que governam o movimento do centro de gravidade de AVs (três graus de liberdade, 3-DOF) sujeito a forças aerodinâmicas (L e D), propulsivas (T) e gravitacionais (W), dentro de um campo de vento (w) 4D: Equação de variação de massa baseada em um modelo do consumo de combustível (F):
Equação de variação de massa baseada em um modelo do consumo de combustível (F):  Equações de navegação em geometria elipsoidal definida pelos raios de curvatura vertical principal local (N) e meridiano (M): [E3]
Equações de navegação em geometria elipsoidal definida pelos raios de curvatura vertical principal local (N) e meridiano (M): [E3]  Efeitos de instruções de movimento em AIDL, que fecham os 3 graus de controle de liberdade:
Efeitos de instruções de movimento em AIDL, que fecham os 3 graus de controle de liberdade:  Efeitos de instruções de movimento em AIDL, que fecham os 3 graus de controle de liberdade:
Efeitos de instruções de movimento em AIDL, que fecham os 3 graus de controle de liberdade: 
[00127] As expressões [E1], [E2] e [E3] são equações diferenciais, enquanto [E4] e [E5] representam restrições algébricas. Todas, coletivamente, constituem o assim chamado sistema de Equações Algébricas Diferenciais (DAE) que, em notação compacta, podem ser reescritas como: [E6] X& =F(X,u,Δ,A,E,t) (de [E1], [E2] e [E3]) Erro! Fonte de referência não encontrada. q(X,u,E,t) =0 Erro! Fonte de referência não encontrada. d(Δ) =c(X,E,t) (de [E5]) em que as variáveis foram escolhidas de acordo com o esquema refletido na tabela mostrada na figura 15.
[00128] Equações [E4], [E5], [E6] podem ser numericamente resolvidas para determinadas condições iniciais: [E7] u(t0) =u0 [E8] X(t0) =X0 [E9] X&(t0)=X&0 que originam a trajetória predita, ou seja, uma sequência discreta de “n” amostras do vetor de estado Xj, ou, tipicamente, uma versão estendida do Yj com informação adicional sobre movimento, configuração, características ambientais e de desempenho de aeronave computados em cada etapa de integração: [E10] Yj={Xj,uj,Δj,Ej,} j={0,...,n} Amostra de trajetória estendida j [E11] T={Yj} Trajetória Estendida
[00129] A definição de uma trajetória de AV em termos de AIDL (intenção de aeronave) assegura que a combinação específica de equações [E4] e [E5] aplicáveis sobre determinado intervalo de tempo, chamado de intervalo operacional, é conhecida ao longo de toda a trajetória. Desse modo, qualquer trajetória pode ser sempre dividida em uma sequência de operações, dentro de cada uma, o problema de computar o correspondente segmento de trajetória é definido por esta combinação específica de instruções de movimento e configuração. Usando a analogia de linguagem, uma trajetória pode ser “dita” como uma sequência de “palavras” ou “sinais”. Cada palavra sendo uma combinação de 7 “letras” que correspondem as 3 instruções de movimento mais as 4 instruções de configuração aplicáveis durante o intervalo de tempo para o qual a palavra correspondente define a trajetória. Por conseguinte, o problema de computar uma trajetória depende da solução de uma sequência de equações diferenciais, Problemas de DAE, com a parte algébrica sendo provida pela AIDL e onde as condições iniciais para o próximo segmento da trajetória são tomadas do estado final do segmento anterior computado.
[00130] A abordagem da computação de trajetória de AV apresentada é baseada em um Modelo de Desempenho de Aeronave de 3-DOF (graus de liberdade) de massa cinética variável (APM), que modela forças aerodinâmicas e propulsivas, bem como, consumo de combustível (envolvido na computação de forças gravitacionais) como uma função dos aspectos de movimento e condições ambientais locais (ver tabela na figura 16). [E12] A = A (X,E,u)
[00131] Além disso, as características ambientais envolvidas no problema de computação de trajetória são providas via o assim chamado Modelo da Terra (EM), cujas características dependem, em geral, da posição e hora local (ver tabela na figura 17), ou seja: [E13] E = E(X,t)
[00132] O Modelo da Terra, (EM), pode ser dividido em dois submodelos: o Geoide, que provê modelos para o geopotencial e gravidade, tipicamente elipsoidais, como uma função da latitude e altitude e o assim chamado “Modelo 4D de Atmosfera” (AM), que provê a pressão, temperatura e vendo da atmosfera em função de posição e tempo (ver figura 8).
[00133] Enquanto o modelo Geoide consiste de uma formulação padrão razoavelmente direta, o Modelo de Atmosfera, AM, envolve todo um domínio de tecnologia relacionado às ciências Atmosfera/Meteorológico, observação da Terra, agências de Previsão Meteorológica, modelos, validação e distribuição de dados etc. que representa uma complexidade maior além do escopo do problema de computação de trajetória de Veículo Aéreo (AV), sem dúvida um problema importante tanto quanto a incerteza.
[00134] Desse modo, o Modelo de Atmosfera (AM) é assumido como acoplado a um serviço externo chamado DMET 9ou p-DMET na abordagem probabilística da presente invenção), encarregado de lidar com a complexidade associada a prever condições atmosféricas relevantes ao TP em dado domínio geoespacial e temporal.
[00135] Conforme mostrado, a abordagem à computação de trajetória AV apresentada lida com muito mais informação do que apenas 4D ou posições e tempo. Em particular, a figura 18 mostra uma tabela que reflete todos os aspectos considerados de trajetória. Pelo que se refere à determinação de erros e métricas em predição de trajetória, qualquer estrutura rigorosa de estudo de incerteza de TP exige a definição do que erros de TP significam para os diferentes aspectos de trajetória de interesse potencial às r- DSTs, bem como, estabelecer métricas apropriadas para sua medição.
[00136] Um tipo de erro é o assim chamados “erro 4D”. Para começar, a figura 12 é considerada, a qual ilustra uma trajetória predita típica e a aeronave em determinada posição denotada como “P”. Tendo em mente que incerteza está presente, a posição real de “A” da aeronave no mesmo instante é esperada diferir daquela predita, P. Para este fim, o conceito de elipsoide de covariância é útil, um elipsoide centrado em P, que contém a posição real A com determinada probabilidade (por exemplo, um-sigma, dois-sigma etc.). A ideia é unir tal volume por meio de uma abordagem simples, ou seja, um tipo de caixa cujas 3 dimensões representam uma medida dos erros de TP geométricos: ao longo do erro de rastreamento em distância (ATER), erro de diafonia (XTE) e erro vertical (VE). Figura 12 representa o conceito, que comumente envolve as seguintes três posições (ver tabela na figura 19). Com efeito, para ligar as posições P, predita, e real, A, no tempo “t”, sendo coincidentes no tempo, é necessário determinar uma terceira posição “N”, chamada “posição nominal”, que é espacialmente correspondente a A, ao longa da trajetória predita, ou seja, a mais próxima posição predita correspondente à real. Desse modo, para conectar P e A, é necessário mover uma quantidade ATER ao longo da trilha predita até que N seja atingido e, em seguida, uma quantidade XTE na direção cruzada, mas uma quantidade VE na direção vertical. N corresponde a um instante de tempo diferente de t e esta diferença de tempo é o assim chamado erro ao longo da trilha no tempo (ATET).
[00137] A tabela mostrada na figura 20 mostra os erros TP definidos em conjunto com suas métricas, com base nos aspectos de trajetória 4D, em que a métrica para XTE exige mais explicação, como a seguir.
[00138] Deixemos N’e A’ serem a pegada de, respectivamente, N e A sobre a superfície de referência (elipsoidal), ou seja, os pontos de coordenadas geodésicas respectivamente. Para erros pequenos, a norma do vetor
respectivamente. Para erros pequenos, a norma do vetor  a distância geodésica entre N’e A ‘, de modo que sua 2a componente no sistema de referência TND seja, assim, uma boa aproximação do XTE.
a distância geodésica entre N’e A ‘, de modo que sua 2a componente no sistema de referência TND seja, assim, uma boa aproximação do XTE.
[00139] O sistema de Referência TND é definido como: - é orientado ao longo da componente horizontal da velocidade sobre o terreno VH no ponto N - tangente ao desvio lateral - é obtido por uma rotação no sentido horário de π/2 de sobre a tangente do plano local à superfície de referência em N’- normal ao desvio lateral em N’ - normal ao trajeto lateral. - aponta para o nadir (abaixo) de modo que os 3 eixos formam um sistema cartesiano orientado de mão direita.
[00140] Como ilustrado na figura 13, o sistema TND resulta de uma rotação da magnitude XN do LLS (sistema de nível local) em N’ao redor de seu 30 eixo XeLLS, XN sendo o rumo (verdadeiro) geodésico da trajetória predita no ponto N.
[00141] O vetor pode ser expresso no Sistema de referência Centrado na Terra- Fixo na Terra (ECEF) como a seguir:
pode ser expresso no Sistema de referência Centrado na Terra- Fixo na Terra (ECEF) como a seguir:  N e “e” sendo, respectivamente, o raio de curvatura na vertical principal e a excentricidade do elipsoide de referência.
N e “e” sendo, respectivamente, o raio de curvatura na vertical principal e a excentricidade do elipsoide de referência.
[00142] Tal vetor, expresso no LLS resulta como: onde as matrizes R3 e R2 representam rotações elementares convencionais consecutivas ao redor do eixo 3 e, depois, do 2.
onde as matrizes R3 e R2 representam rotações elementares convencionais consecutivas ao redor do eixo 3 e, depois, do 2.
[00143] Finalmente, o vetor pode ser expresso no Sistema TND como:
pode ser expresso no Sistema TND como: 
[00144] Uma vez que as métricas de erro de TP 4D tenham sido definidas, métricas de erro de TP adicionais, como erros de altitude, velocidade ou consumo de combustível, podem ser desenvolvidos, associados a outros aspectos de trajetória, como representado na tabela mostrada na figura 21. Métricas de erro de velocidade podem ser adaptadas a diferentes tipos de velocidades, como IAS, CAS, GS ou MACH. Similarmente, métricas de erro de altitude podem ser adaptadas à referência de solo, magnética ou verdadeira, em vez de referência aerodinâmica.
[00145] Finalmente, é interessante definir métricas adicionais que exploram observações reais de propriedades atmosféricas obtidas ao longo da trajetória real, que podem ser usadas para avaliar a precisão de condições atmosféricas preditas.
[00146] A tabela da figura 22 mostra tais conceitos de erros e métricas associadas ao modelo atmosférico (AM).
[00147] A tabela da figura 23 mostra uma lista não compreensiva de típicos sistemas relativos a trajetória (DSTs), funções típicas relativas a trajetória com que trabalham, e aspectos relativos a trajetória com que estas funções operam. Embora cada DST relativo a trajetória, em princípio, combine funcionalidade relativa a trajetória de modos específicos conforme exigido por seus objetivos comerciais, muitos dos mesmos atributos podem ser identificados entre DSTs correntes, em uso ou futuros, que são advogados dentro de diferentes aplicações comerciais e militares em ambos os domínios ATM e UAS.
[00148] Uma premissa fundamental de projeto da tecnologia AIDL é possibilitar uma infraestrutura comum capaz de suportar, idealmente, qualquer função relativa a trajetória de modo que uma grande extensão da funcionalidade de qualquer DST relativa a trajetória possa ser realizada e, provavelmente, melhorada através da combinação de um conjunto de funções normais primitivas relativas a trajetória.
[00149] Como já explicado, a maioria das DSTs de algum modo se baseiam em TP em algum estágio para suportar uma análise do tipo “o que acontece se” que, ao final, sustenta seu processo de tomar decisão. Desse modo, ao introduzir incerteza no TP, é altamente necessário conceber uma abordagem que contenha generalidade suficiente para que uma infraestrutura de TP sirva tantas DSTs quanto possíveis.
[00150] Com efeito, ao se considerar um grupo “W” de cenários atmosféricos previstos Wi assumidos para capturar “razoavelmente” a possível evolução de condições atmosféricas dentro de um domínio 4D de interesse, esse pode ser caracterizado por [X1,X.2]x[Φ1,Φ2]x[h1,h2]x[t1,t2]: [E17] W = {Wi} i={1,...,q}
[00151] A despeito do termo “razoavelmente “poder soar confuso, dentro do escopo da tecnologia p-DMET, o ponto chave é que, embora mais provavelmente o cenário atmosférico atual não termine casando com qualquer dos elementos de W, a faixa de condições coberta por seus elementos dá uma medida da incerteza associada à previsão.
[00152] Dado W, um correspondente grupo T de possíveis trajetórias preditas Ti pode ser obtido, cada um computado com base no correspondente cenário atmosférico Wi, o resto de entradas sendo o mesmo para todas as instâncias “q”: [E18] T = {Ti} i={1,...,q}
[00153] Para algumas aplicações, a DST é interessada na avaliação de uma figura de mérito (FOM) de uma única trajetória, que, considerando os “q” possíveis cenários atmosféricos, dá origem a uma população de possíveis valores de FOM: [E19] FOMi = f(Ti) i={1,...,q}
[00154] Neste caso, a DST exige: a) selecionar uma as trajetórias (i=R) dentre T, que seja representativa de um valor central da população de FOM no sentido da média, da moda, da mediana, um percentual, ou outra medida estatística, e b) obtendo a dispersão da FOM associada ao resto de trajetórias em relação àquela selecionada.
[00155] Exemplos de FOMs, neste caso, são: - Combustível queimado: Δm=mn-m0 - Hora de chegada na posição fixada (tempo de voo): Δt=tn-t0 - Índice de custo (custo de tempo versus custo de combustível): CI- Δt-DΔm - Alcance (distância horizontal coberta): Δr=rn-r0 - Posição 2D em determinado tempo ou posição (Xn,Φn) ou sobre um segmento de trajetória (ATER, XTE) - Altitude em determinado tempo ou posição (hn) ou sobre um segmento de trajetória (VE) - Posição 3D em determinado tempo ou posição (Xn,Φn,hn) ou sobre um segmento de trajetória (ATER, XTE, VE) - Posição 4D em determinado tempo ou posição (Xn,Φn,hn,tn) ou sobre um segmento de trajetória (ATER, XTE, VE, ATET) - Velocidade em determinação posição (VTAS,n) ou sobre um segmento de trajetória - Altitude (xTAs,n, μTAs,n, YTAs,n) em determinada posição ou sobre um segmento de trajetória (BE, PAE, BAE) - Vórtice de esteira em determinado momento ou posição: função de velocidade (VTAS), configuração (δHLk,δSBk,δLGk) e vento (wk).
[00156] Em outras aplicações, a DST é interessada em uma figura de mérito agregada de um conjunto de trajetórias “S”, que são avaliadas simultaneamente: [E20] S = {Tik} k={1,...,s} i={1,...,q} [E21] FOMi = f(Ti ,Ti ,.,Ti ) i={1,.,q}
[00157] A FOM, neste caso, é uma função de múltiplas trajetórias. Para qualquer cenário de atmosfera possível Wi, o conjunto de correspondentes trajetórias adota uma forma específica, que leva a uma FOMi geral específica.
[00158] Novamente, a DST, neste caso, exige: a) selecionar o índice i=R do cenário que leva ao redor do conjunto específico de trajetórias preditas robustas que melhor representa um valor central da população de FOM, e b) obter a dispersão da FOM associada ao resto de cenários relativos àquela selecionada.
[00159] Exemplos de FOMs, neste caso, são tipicamente, associados a tráfego ou a uma frota de veículos, por exemplo; - Combustível queimado: ∑ Δkm= ∑ (mnk-m0k) for k={1,.,s}, - Ruído: função de posição (ATERk,XTEk,VEk), empuxo (Tk), configuração (δHLk,δSBk,δLGk) e vento (wk) - Emissões: função de combustível queimado e vento - Conflitividade: número de perda de eventos LOS multiplicado pela probabilidade de LOS (função de ATERk, XTEk e VEk)
[00160] As tabelas das figuras 24a e 24b ilustram qualitativamente as relações entre um conjunto representativo de DSTs considerado e as FOMs de quem eles têm (ou poderiam potencialmente ter) interesse, para a clareza de seus processos de tomada de decisão.
[00161] Conforme mostrado nas tabelas das figuras 24a e 24b, dois subcasos diferentes podem ser distinguidos, dependendo de se a DST está apenas interessada em avaliar a FOM no ponto final da trajetória, ou ao longo de toda a trajetória.
[00162] Como já indicado, qualquer r-DST baseada em trajetória é interessada, essencialmente, em dois elementos: a) a assim chamada trajetória predita robusta (RPT) representativa de um valor central da população de FOM, dado certo critério de seleção de trajetória que define tal valor central (centroide), por exemplo, a média, a moda, a mediana ou dado percentual, e b) a população de FOM que corresponde ao espaço de amostragem de trajetória (ou seja, o dado grupo de trajetórias), do qual medidas de dispersão de FOM, como STD, MAE, SEE ou RMS podem ser obtidas.
[00163] A seguir, é apresentada uma metodologia geral para determinar a trajetória predita robusta (RPT) no sentido descrito, juntamente com a população de valores de FOM associada, dada a definição da FOM provida pela unidade de ferramenta de suporte de decisão robusta (3), r-DST.
[00164] Por questão de simplicidade, é considerado que a única fonte de incerteza no TP provém da previsão atmosférica, ou seja, a intenção de aeronave expressa em AIDL, as condições iniciais) IC) e o modelo de desempenho de aeronave (APM) permanecem invariáveis, enquanto o cenário atmosférico Wi pode ser qualquer dos membros do grupo W (ver equação [E17].
[00165] A metodologia apresentada abaixo refere-se ao único caso de trajetória já introduzido, em vez de aos múltiplos casos de trajetórias. Como indicado acima, dois subcasos são distinguidos: a) Mérito no ponto final: neste caso, a aplicação da dada função de FOM a cada das trajetórias {Ti} do grupo T origina uma população de valores de FOM denotada como”: [E22] Zi = FOM(Ti) i={1, ..., q} [E23] z = {Zi} = [zi,Z2, ...,zq]T, em que, nos exemplos verificados, a FOM adota as formas ilustradas na tabela da figura 25.
[00166] De modo a selecionar um valor central representativo da população de FOM, um critério de seleção de trajetória (TSC) deve ser provido pela unidade de ferramenta de suporte de decisão robusta (3), r-DST. A tabela da figura 26 mostra os critérios mais típicos usados em Estatística para se derivar medidas centrais de uma variável estatística. Pela aplicação do TSC à população de valores de FOM, a correspondente medida central, zc pode ser obtida como: [E24] zC = TSC(z).
[00167] Uma vez ser pouco provável que zc computado case com qualquer dos valores da população z, a mais aproximada é selecionada como a mais representativa da medida central.
[00168] Considerando as equações a seguir: [E25] εi=zi-zC i={1, ..., q} [E26] ε = {εi} =[z1,z2, . ...zq]T. uma expressão da população das diferenças entre valores zi de FOM e a medida central zc, a menor em valor absoluto pode ser denotada como: [E27] εR = [min{εi2}]1/2 RD{1,...,q}, que define o índice R que identifica a trajetória Tr do grupo cuja FOM associada é a mais aproximada do valor central zc, ou seja, a trajetória predita robusta, RPT: [E28] TR= T [R] [E29] zR = FOM(TR)=z[R], Uma vez que RPT tenha sido determinada, a população de desvios de FOM em relação ao assim chamado centroide zr pode ser expresso como: [E30] ei = zi - zR i={1, ., q} [E31] e = {ei} = [e1,e2, .,eq]T, que é esperada representar a população de dispersão de FOM, caso as condições atmosféricas atuais difiram do cenário Wr escolhido para computar a RPT.
[00169] Da população “e”, qualquer medida estatística de dispersão que faça sentido à unidade de ferramenta de suporte de decisão robusta (3), r- DST, pode ser obtida. A tabela da figura 27 mostra as mais típicas. b) Mérito da trajetória completa
[00170] A abordagem descrita acima pode ser generalizada para o caso em que a r-DST não esteja interessada apenas na avaliação de incerteza de aspectos de trajetória em determinada posição fixada ou instante de tempo, mas sobre toda a trajetória. Este é o caso ao se avaliar variáveis, como conformação de Navegação Areal probabilística (p-RNAV) de trajetória geométrica ou guia contínuo de tempo/velocidade.
[00171] Exemplos de típicas FOMs de interesse, neste caso, estão mostradas na tabela da figura 28.
[00172] Neste caso, outro grau de liberdade (DOF) tem papel associado ao índice j, que identifica toda amostra única Yij de cada uma das trajetórias Ti do grupo.
[00173] Por isto, a dada FOM não é usada diretamente, mas uma figura correspondente (denotada por “z” na figura 28) é aplicada em seu lugar, em nível de amostra de trajetória para obter uma população de nível de amostra de trajetória de FOMs, como a seguir:
[00174] Expressões [E32] e [E33] assumem que todas as trajetórias que pertençam ao grupo considerado têm o mesmo número de amostras de vetor de estado. Agora, TSC é aplicado ao longo de coluna sobre a população de z, de modo que o valor central zcj seja obtido para cada conjunto de correspondentes amostras de trajetória:
[00175] Considerando as equações:
[00176] Como uma expressão da população das diferenças entre valores FOM em nível de amostra de trajetória zij e a medida central zCj, a mais baixa em valor absoluto pode ser denotada como: que define o índice R que identifica a trajetória TR do conjunto cuja FOM associada é a mais aproximada do valor central zC, ou seja, a trajetória predita robusta, RPT: [E39] TR= T [R] E o centroide que, neste caso, é o valor n-dimensional: [E40] zR = {zRj} = [zR1,zR2, ,zRn]T
que define o índice R que identifica a trajetória TR do conjunto cuja FOM associada é a mais aproximada do valor central zC, ou seja, a trajetória predita robusta, RPT: [E39] TR= T [R] E o centroide que, neste caso, é o valor n-dimensional: [E40] zR = {zRj} = [zR1,zR2, ,zRn]T
[00177] Uma vez que RPT tenha sido determinada, a população de desvios de FOM em relação ao centroide zR pode ser expresso como:
[00178] Deste ponto em diante, medidas de dispersão de FOM podem ser derivadas da população “e”, seguindo uma abordagem análoga àquela descrita no caso anterior considerado (mérito no ponto final).
[00179] A seguir, uma breve descrição que aborda a arquitetura de uma cama de teste baseada nas premissas estabelecidas para o método acima descrito, que se destina a suportar as análises estocásticas de diferentes aspectos de trajetória, conforme exigido para rodar muitos casos de estudo diferentes.
[00180] Com o objetivo de prover uma visão ampla da aqt, a descrição a seguir apresenta tanto uma visão estática de seus principais componentes lógicos, como também, uma visão dinâmica que detalha as principais interações entre eles.
[00181] A figura 14 mostra a arquitetura lógica de cama de teste geral, incluindo seus três sistemas principais (r-DST, s-TP e p-DMET) e os subsistemas de sua peça principal, que é a unidade processadora de predição de trajetória estocástica (1), s-TP.
[00182] As principais funções dos sistemas/subsistemas identificadas no diagrama da figura 14 juntamente com suas interfaces são explicadas a seguir. a) Unidade DST robusta (3), r-DST:
[00183] Em geral, DSTs existentes baseiam seu processo de tomada de decisão em Preditores de Trajetória (TP), tipicamente, um componente interno desenvolvido ad-hoc, que é baseado em uma única trajetória predita (determinística) para cada conjunto de entradas, como tipo de AV, definição de trajetória e cenário atmosférico.
[00184] A arquitetura proposta mantém esta funcionalidade, embora o TP seja apresentado como uma infraestrutura externa de computação de trajetória (TC) baseada em AIDL. Interfaces 1, 5, 7 e 8 mostradas na figura 14 permitem que DST, respectivamente, estabeleça o domínio 4D para o qual um AM é necessário, selecionar o tipo de AV, prover a intenção de aeronave e solicitar/recuperar a trajetória predita. O conceito de DST-robusta considerado aqui, porém, difere das DSTs existentes pelo fato de novos mecanismos serem habilitados para permitir que a unidade de ferramenta de suporte de decisão robusta (3), r-DST, baseie seu processo de tomada de decisão em informação adicional sobre a sensitividade de trajetórias preditas para aspectos que são conhecidos como incertos. Além disso, esses mecanismos permitem que a unidade de ferramenta de suporte de decisão robusta (3), r-DST, selecione os aspectos específicos da trajetória predita, cuja incerteza é relevante para o processo de tomada de decisão.
[00185] A nova funcionalidade é realizada através da interface 13 da figura 14, que permite que a unidade de ferramenta de suporte de decisão robusta (3), r-DST, proveja a unidade processadora de predição de trajetória estocástica (1), s-TP, com a FOM de interesse, Critérios de seleção de trajetória (TSC),e informação de configuração sobre como personalizar variáveis estocásticas envolvidas no processo de TC (estocástico), de modo que a unidade processadora de predição de trajetória estocástica(1), s-TP, retorne a trajetória predita robusta (RPT) e incerteza de FOM computadas consequentemente. A interface 13 da figura 14 também provê a unidade de ferramenta de suporte de decisão robusta (30, r-DST, com metadados relativos à capacidade de personalização de s-TP; essencialmente os parâmetros que podem ser personalizados, a faixa de valores que eles podem adotar e uma medida da complexidade envolvida na computação para uma dada configuração de personalização.
[00186] As tabelas das figuras 29a e 29b proveem mais detalhes sobre interações entre a unidade de ferramenta de suporte de decisão robusta (3_, r- DST, e a unidade processadora de predição de trajetória estocástica (1), s-TP. B) Unidade processadora de predição de trajetória estocástica baseada em AIDL (1), s-TP:
[00187] A unidade processadora de predição de trajetória estocástica (1), s-TP é constituída por dois componentes principais, representados na figura 14 como Unidade de Motor de Personalização (4), RE, e unidade de Computação de Trajetória (5), TC. Essencialmente, a abordagem é baseada na simulação de Monte Carlo. Desse modo, a unidade de motor de personalização (4), RE, trabalha iterativamente com a unidade de computação de trajetória subjacente (5), TC, que computa uma trajetória para cada combinação de todas as variáveis estocásticas selecionadas pela unidade de motor de personalização (4), UCT. Aproximadamente,[os as variáveis estocásticas atuando no processo de personalização terem assumido todos seus valores possíveis, que é designado pela unidade de ferramenta de suporte de decisão robusta (3), r-DST, a unidade de motor de personalização (4), UCT, coleta todas as “possíveis” trajetórias preditas e efetua a análise de FOM explicada acima (análise de trajetória única e trajetórias múltiplas) ou uma similarmente generalizada, caso as variáveis estocásticas consideradas diferirem do caso acima. UNIDADE DE MOTOR DE PERSONALIZAÇÃO (4), UCT:
[00188] A unidade de motor de personalização (4), UCT, realiza a funcionalidade da unidade processadora de predição de trajetória estocástica (1), s-TP, através da interface 13 descrita acima. Para este fim, a unidade de motor de personalização (4), UCT, interage através de interfaces 8, 9, 10, 11 e 12 com a unidade de computação de trajetória subjacente (5), TC, como d escrito nas tabelas das figuras 30a e 30b.
[00189] A unidade de motor de personalização (4), UCT, é encarregada de formar a sequência de personalização que, tipicamente, consiste de uma série de loops aninhados, cada um associado a um único parâmetro estocástico varrendo sua faixa correspondente em etapas selecionadas pela unidade de motor de personalização (4), RE, para, apropriadamente, tratar da complexidade computacional. Toda vez que uma combinação específica é feita, a unidade de motor de personalização (4), UCT, acessa a interface 8 e recupera a trajetória predita associada a tal combinação. Ao finalizar a varredura de todas as faixas de parâmetros estocásticos, a unidade de motor de personalização (4), UCT, passa a efetuar a análise explicada acima. Unidade de Computação de Trajetória (5), TC:
[00190] A unidade de computação de trajetória (5), TC, é o componente encarregado de computar uma trajetória predita para cada conjunto de entradas, incluindo valores dados para os parâmetros estocásticos envolvidos. Desse modo, embora parâmetros estocásticos sejam manuseados através de suas interfaces com a unidade de motor de personalização (4), UCT, a unidade de computação de trajetória (5), TC, trabalha de uma maneira determinística. Seus elementos principais são o motor de trajetória (TE), modelo de desempenho de aeronave (APM) e modelo de atmosfera probabilístico (PAM). A tabela da figura 31 descreve as interfaces entre eles. Unidade de serviço meteorológico digital probabilístico (2), p-DMET:
[00191] A unidade de serviço meteorológico digital probabilístico (2), p-MDET, do sistema da presente invenção, é encarregada de prover a unidade processadora de predição de trajetória estocástica (1), s-TP, com previsões atmosféricas probabilísticas baseadas na abordagem grupal proposta. Para este fim, ela interage com a unidade de computação de trajetória (5), componente interno de TC, PAM, através da interface 2, cujo projeto de alto nível está esboçado na tabela da figura 32.
[00192] Os presentes método e sistema são inovadores, comparados com o estado atual da técnica, devido a: 1) envolver uma combinação sem precedentes de capacidades e áreas de expertise (previsão meteorológica, serviços meteorológicos, predição e gerenciamento de trajetória, processamento de dados volumosos e operações de tráfego aéreo); 2) focar em incerteza de previsão meteorológica, combinada com outras fontes de incerteza, propagadas através do ciclo de vida de ponta a ponta da trajetória de aeronave, com o objetivo de entender perfeitamente a quantificar seu efeito final sobre decisões operacionais do usuário; 3) o método especificar métricas (em termos de FOMs ou parâmetros equivalentes ou agregados) caracterizando a incerteza relativa a produtos de estado da técnica atual para suporte de decisão de Gerenciamento de Tráfego Aéreo (ATM) e, desse modo, uma medição do benefício operacional de produtos futuros;
[00193] Em particular, as três unidades principais de pesquisa contêm um número de aspectos inovadores específicos:
[00194] Com relação à unidade de serviço meteorológico digital probabilístico (2) (2), p-DMET: 4) embora previsões meteorológicas genéricas sejam amplamente disponíveis, produtos/serviços personalizados de previsão meteorológica especializados para operações de linhas aéreas e ATM em um contexto baseado em trajetória não são disponíveis; 5) Incerteza de previsão meteorológica é extraída de um grupo de modelos e condições usado por três organizações diferentes com experiência consolidada na área, assegurando resultados de amplo escopo;
[00195] Em relação à unidade processadora de predição de trajetória estocástica (1), s-TP: 6) o TP estocástico em vez de determinístico, suprido por previsões meteorológicas probabilísticas, é novidade em gerenciamento de tráfego aéreo (ATM); 7) a interação entre a unidade processadora de predição de trajetória estocástica (1), s-TP, e a unidade de ferramenta de suporte de decisão robusta (3), r-DST, em termos de FOM e incerteza relacionada nunca foi abordada;
[00196] Em relação à unidade de ferramenta de suporte de decisão robusta (3), r-DST: 8) o uso de FOMs personalizadas para caracterizar a incerteza de TP para sua exploração em suporte de decisão automatizada é novidade em comparação ao atual estado da técnica, onde DSTs baseadas em TP determinístico não consideram incerteza; 9) a análise da correlação entre incerteza em medidas de FOM e desempenho de DST nunca foi tentada antes.
[00197] Uma análise de sensitividade para expressar os requisitos necessários de serem satisfeitos por modelos meteorológicos subjacentes a DSTs baseados em TP para suportar eficazmente objetivos de SESAR (Single European Sky ATM Research) nunca chegou tão longe.
Claims (11)
1. Método para definir e predizer trajetórias de aeronaves, para uso em gerenciamento de voo de uma aeronave, que compreende: a. adquirir dados de entrada tanto de características de desempenho de aeronave, quanto de dados atmosféricos; e b. definir parâmetros de trajetória aos quais a trajetória de aeronave deve estar sujeita, em que: - parâmetros de trajetória de aeronave são definidos por meio de uma Linguagem de Descrição de Intenção de Aeronave específica, que é constituída por sinais específicos, em que cada um dos sinais específicos é uma combinação de instruções que correspondem a pelo menos três restrições de trajetória e quatro instruções de configuração aplicáveis durante o intervalo de tempo para o qual o sinal correspondente define a trajetória, em que cada segmento da trajetória de aeronave é descrito por cada sinal da Linguagem de Descrição de Intenção de Aeronave, em que cada combinação específica de sinais da Linguagem de Descrição de Intenção de Aeronave descreve completamente toda uma trajetória; - dados atmosféricos são adquiridos em forma de uma pluralidade de grupos de previsão atmosférica, cada previsão atmosférica dentro de um grupo de previsão atmosférica expressando um determinado cenário meteorológico com uma probabilidade associada; caracterizado pelo fato de que o método compreende adicionalmente: c. calcular uma trajetória predita a partir de cada previsão atmosférica de um grupo de previsões atmosféricas, a dita trajetória predita tendo informação associada a respeito de determinada figura de mérito da trajetória de aeronave; em que um grupo de trajetórias preditas é obtido de cada grupo de previsões atmosféricas, cada trajetória predita do grupo de trajetórias preditas tendo uma probabilidade associada derivada da probabilidade de cada previsão atmosférica dentro de um grupo de previsão atmosférica; e d. selecionar uma trajetória predita do grupo de trajetórias preditas, por: selecionar uma figura de mérito específica de cada trajetória predita de aeronave; determinar, para cada trajetória predita dentro de um grupo de trajetórias preditas, o valor da figura de mérito selecionada; calcular, de acordo com um critério estatístico predeterminado, um valor estatístico da figura de mérito selecionada, o dito valor estatístico calculado representando, de acordo com a figura de mérito selecionada, todas as trajetórias preditas dentro de cada grupo de trajetórias preditas; determinar a trajetória predita, de cada grupo de trajetórias preditas, cujo valor para a figura de mérito selecionada é mais aproximado ao valor estatístico previamente calculado da figura de mérito selecionada; calcular, de acordo com um critério estatístico predeterminado, a dispersão de valores da figura de mérito selecionada, com relação ao valor estatístico calculado da figura de mérito selecionada para todas as trajetórias preditas de cada grupo de trajetórias preditas; selecionar, dentre as trajetórias preditas calculadas, a trajetória predita cujo valor para a figura de mérito selecionada é mais aproximado ao valor estatístico previamente calculado da figura de mérito selecionada; e utilizar a trajetória predita selecionada no gerenciamento de voo de uma aeronave em pelo menos um segmento de um voo.
2. Método para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 1, caracterizado pelo fato de que cada um dos ditos sinais específicos da Linguagem de Descrição de Intenção de Aeronave ser constituído pela combinação de pelo menos três restrições de trajetória e quatro instruções de configuração, em que todos os graus de liberdade da trajetória de aeronave são confrontados pela imposição de três restrições de trajetória , desse modo, a trajetória de aeronave sendo completamente definida pela imposição de três restrições de trajetória, estas restrições sendo selecionadas dentre, pelo menos as seguintes: i. longitude; ii. latitude; iii. altitude; iv. velocidade real do ar; v. rumo; vi. aceleração; vii. ângulo de trajeto; viii. ângulo de inclinação; ix. hipersustentação; x. freios de velocidade.
3. Método para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 1, caracterizado pelo fato de que a dita figura de mérito é selecionada de pelo menos: i. combustível queimado; ii. hora de chegada em determinada posição; iii. índice de custo; iv. faixa de distância horizontal coberta; v. Posição 2D em hora determinada; vi. posição 2D em uma determinada posição; vii. Posição 2D sobre um segmento de trajetória; viii. altitude em determinado instante; ix. altitude em determinada posição; x. altitude sobre um segmento de trajetória; xi. Posição 3D a determinado instante; xii. Posição 3D em uma determinada posição; xiii. Posição 3D sobre um segmento de trajetória; xiv. Posição 4D em dado instante; xv. Posição 4D sobre determinada posição; xvi. Posição 4D sobre um segmento de trajetória; xvii. velocidade em uma determinada posição; xviii. velocidade sobre um segmento de trajetória; xix. altitude em determinada posição; xx. atitude sobre um segmento de trajetória; xxi. vórtice de esteira em dado instante; xxii. vórtice de esteira em determinada posição.
4. Sistema para definir e predizer trajetória de aeronaves, para uso em gerenciamento de voo de uma aeronave, o sistema caracterizado pelo fato de que compreende: a. uma unidade processadora (1), para calcular trajetórias preditas para cada segmento de um voo de aeronave utilizando uma Linguagem de Descrição de Intenção de Aeronave específica, cada trajetória predita calculada sendo calculada com base em dados estocásticos de entrada, cada trajetória predita calculada, portanto, sendo estocástica e tendo uma probabilidade associada, os dados de entrada selecionados dentre pelo menos os seguintes: i. parâmetros de Modelo de Desempenho de Aeronave; ii. previsões atmosféricas; b. uma unidade de Serviço Meteorológico Digital (2), sendo configurada para prover a unidade processadora (1) para calcular trajetórias preditas com a entrada de um grupo de previsões atmosféricas, cada previsão atmosférica dentro de um grupo de previsão atmosférica expressando um determinado cenário meteorológico com uma probabilidade associada; c. uma unidade de Ferramenta de Suporte de Decisão robusta (3), sendo configurada para: i. prover a unidade processadora (1) para calcular trajetórias preditas com dados de entrada necessários para predizer trajetórias; e ii. selecionar uma trajetória predita dentre as trajetórias preditas calculadas pela unidade processadora (1) para calcular trajetórias preditas; em que a unidade processadora (1) para calcular trajetórias preditas é configurada para: - calcular uma trajetória predita a partir de cada previsão atmosférica de um grupo de previsões atmosféricas; - determinar, para cada trajetória predita dentro de um grupo de trajetórias preditas, o valor de uma figura de mérito específica sendo selecionada pela Ferramenta de Suporte de Decisão robusta (3); - calcular, de acordo com um primeiro critério estatístico predeterminado, um valor estatístico da figura de mérito selecionada, o valor estatístico calculado representando, de acordo com a figura de mérito selecionada, todas as trajetórias preditas dentro de cada grupo de trajetórias preditas; - determinar a trajetória predita, de cada grupo de trajetórias preditas, cujo valor para a figura de mérito selecionada é mais aproximado ao valor estatístico previamente calculado da figura de mérito selecionada; - calcular, de acordo com um segundo critério estatístico predeterminado, a dispersão de valores da figura de mérito selecionada, com relação ao valor estatístico calculado da figura de mérito selecionada para todas as trajetórias preditas de cada grupo de trajetórias preditas; em que a unidade de ferramenta de suporte de decisão robusta (3) é configurada para selecionar, dentre as trajetórias preditas calculadas, a trajetória predita cujo valor para a figura de mérito selecionada é mais aproximado ao valor estatístico previamente calculado da figura de mérito selecionada; em que a trajetória predita selecionada é utilizada por um sistema de gerenciamento de voo na guia de uma aeronave em pelo menos um segmento de um voo.
5. Sistema para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 4, caracterizado pelo fato de que a unidade de serviço meteorológico digital probabilístico (2) define: a. um domínio de modelo atmosférico incluindo um ou mais parâmetros que definem uma região envolvendo o volume de espaço aéreo na qual a trajetória de voo está situada; b. um modelo atmosférico provendo múltiplos cenários atmosféricos de parâmetros atmosféricos relevantes para o espaço aéreo, os ditos cenários formando grupos de previsões atmosféricas.
6. Sistema para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 4, caracterizado pelo fato de que a unidade de ferramenta de suporte de decisão robusta (3) define: a. uma trajetória de voo predeterminada incluindo um ou mais parâmetros que definem a trajetória de voo, por meio de imposição de uma combinação de três parâmetros de restrição de trajetória de cada segmento de trajetória de voo; b. um Modelo de Desempenho de Aeronave incluindo um ou mais parâmetros que definem resposta de aeronave sob condições externas; c. parâmetros relativos às condições iniciais de aeronave no início de um segmento de trajetória de voo; d. um conjunto de parâmetros definindo pelo menos uma figura de mérito de uma trajetória predita calculada pela unidade processadora (1) para calcular trajetórias preditas; e. pelo menos um critério para a escolha de uma trajetória predita dentre pelo menos um grupo de trajetórias preditas calculadas pela unidade processadora (1) para calcular trajetórias preditas, este pelo menos um critério baseado na busca de que trajetória predita melhor representa um valor estatístico central de determinada figura de mérito; f. pelo menos um critério para o cálculo de uma incerteza associada com a qual uma trajetória predita escolhida representa um valor estatístico central de determinada figura de mérito.
7. Sistema para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 4, caracterizado pelo fato de que a unidade processadora (1) para calcular trajetórias preditas: a. determina um conjunto de parâmetros dentre os parâmetros de entrada providos pela unidade de Ferramenta de Suporte de Decisão robusta (3), que são considerados estocásticos, este conjunto de parâmetros, portanto, sendo sujeito a incerteza; b. determina tipo e faixa de incerteza do conjunto de parâmetros estocásticos.
8. Sistema para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 4, caracterizado pelo fato de que a unidade processadora (1) para calcular trajetórias preditas: a. determina, com base nos parâmetros para o modelo atmosférico, Modelo de Desempenho de Aeronave, descrição de trajetória, e condições iniciais, um conjunto de dados representando uma trajetória predita; b. adjudica valores, com respectivas faixas de incerteza, aos parâmetros a serem feitos estocásticos, para criar uma pluralidade de casos possíveis do conjunto de dados representar a trajetória predita; c. calcula, com base no grupo de previsões atmosféricas, um grupo de trajetórias preditas, cada trajetória predita calculada baseada em um correspondente cenário de atmosfera; d. avalia a pelo menos uma figura de mérito de cada trajetória predita dentro de um grupo de trajetórias preditas, para obter uma população de valores dessas figuras de mérito; e. identifica, de acordo com o primeiro critério estatístico predeterminado, uma trajetória predita dentro de cada conjunto de trajetórias preditas, que representa um valor central da pelo menos uma figura de mérito avaliada; f. obtém, de acordo com o segundo critério estatístico predeterminado, a dispersão dos valores da pelo menos uma figura de mérito avaliada, associada às trajetórias restantes do grupo de trajetórias preditas, com relação à trajetória predita identificada na fase anterior.
9. Sistema para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 8, caracterizado pelo fato de que a unidade processadora (1) para calcular trajetórias preditas compreende pelo menos: a. uma unidade de motor de personalização (4), para adjudicar valores aos parâmetros para se tornarem estocásticos, recebidos da unidade de serviço meteorológico digital probabilístico (2) e da unidade de ferramenta de suporte de decisão robusta (3); b. uma unidade de computação de trajetória (5), para calcular trajetórias preditas baseada nos dados de entrada providos pela unidade de motor de personalização (4).
10. Sistema para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 4, caracterizado pelo fato de que os ditos dados de entrada serem selecionados de pelo menos dos seguintes: i. Parâmetros de Modelo de Desempenho de Aeronave; ii. Parâmetros de descrição de trajetória; iii. Figuras de mérito predeterminadas; iv. Critérios de seleção de trajetória; v. Previsões atmosféricas.
11. Sistema para definir e predizer trajetórias de aeronaves de acordo com a reivindicação 4, caracterizado pelo fato de que a dita unidade de ferramenta de suporte de decisão robusta (3) é configurada para prover a unidade de processador (1) para calcular trajetórias preditas com entrada de: - Parâmetros de Modelo de Desempenho de aeronave; - Parâmetros de descrição de trajetória; - Figuras de Mérito selecionadas; e - Critérios de seleção de trajetória.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13382579.4A EP2889579B1 (en) | 2013-12-31 | 2013-12-31 | System and method for defining and predicting aircraft trajectories |
| EP13382579.4 | 2013-12-31 | ||
| PCT/IB2014/066292 WO2015101848A2 (en) | 2013-12-31 | 2014-11-24 | System and method for defining and predicting aircraft trajectories |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112016011555A2 BR112016011555A2 (pt) | 2017-08-08 |
| BR112016011555B1 true BR112016011555B1 (pt) | 2022-03-08 |
Family
ID=50002448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016011555-4A BR112016011555B1 (pt) | 2013-12-31 | 2014-11-24 | Método e sistema para definir e predizer trajetória de aeronaves |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9741254B2 (pt) |
| EP (1) | EP2889579B1 (pt) |
| JP (1) | JP6553625B2 (pt) |
| CN (1) | CN105874479B (pt) |
| BR (1) | BR112016011555B1 (pt) |
| ES (1) | ES2668896T3 (pt) |
| WO (1) | WO2015101848A2 (pt) |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2668896T3 (es) * | 2013-12-31 | 2018-05-23 | The Boeing Company | Sistema y método para definir y predecir trayectorias de aeronave |
| EP2916308B1 (en) | 2014-03-07 | 2016-05-25 | The Boeing Company | An aircraft intent processor |
| EP3109805A1 (en) * | 2015-06-22 | 2016-12-28 | The Boeing Company | A computer-implemented method and system for estimating impact of new operational conditions in a baseline air traffic scenario |
| GB2529551B (en) * | 2015-07-22 | 2016-07-20 | Via Tech Ltd | Method for detecting conflicts between aircraft |
| JP2018534864A (ja) | 2015-10-22 | 2018-11-22 | タレス・アレーニア・スペース・イタリア・エッセ・ピ・ア・コン・ウニコ・ソシオ | 航空用の生命の安全サービスおよびデータリンクの容量および安全を高めるための方法およびシステム |
| US10283000B2 (en) * | 2015-10-23 | 2019-05-07 | Vigilair Limited | Unmanned aerial vehicle deployment system |
| WO2017108133A1 (en) * | 2015-12-23 | 2017-06-29 | Swiss Reinsurance Company Ltd. | Automated, reactive flight-delay risk-transfer system and method thereof |
| JP6357176B2 (ja) * | 2016-01-12 | 2018-07-11 | 株式会社Subaru | 移動経路設定装置、移動経路設定方法及び移動経路設定プログラム |
| US10043398B2 (en) | 2016-03-25 | 2018-08-07 | International Business Machines Corporation | Drone coordination |
| FR3053779B1 (fr) * | 2016-07-07 | 2018-06-29 | Thales | Dispositif et methode de calcul de prediction de performance de navigation estimee |
| FR3053780B1 (fr) * | 2016-07-07 | 2018-07-06 | Thales | Dispositif et methode de calcul de prediction de performance de navigation requise |
| CN106406343B (zh) * | 2016-09-23 | 2020-07-10 | 北京小米移动软件有限公司 | 无人飞行器的控制方法、装置和系统 |
| CN106529705A (zh) * | 2016-10-25 | 2017-03-22 | 合肥飞友网络科技有限公司 | 一种低频率经纬度数据补充优化飞行轨迹的方法 |
| CN106650172B (zh) * | 2017-01-05 | 2020-09-01 | 电子科技大学 | 基于mdp的机载防撞系统逻辑单元的设计方法 |
| US10037704B1 (en) * | 2017-02-01 | 2018-07-31 | David Myr | Automatic real-time air traffic control system and method for maximizing landings / takeoffs capacity of the airport and minimizing aircrafts landing times |
| US10074283B1 (en) * | 2017-03-09 | 2018-09-11 | The Boeing Company | Resilient enhancement of trajectory-based operations in aviation |
| US10228692B2 (en) | 2017-03-27 | 2019-03-12 | Gulfstream Aerospace Corporation | Aircraft flight envelope protection and recovery autopilot |
| US20180286253A1 (en) * | 2017-03-31 | 2018-10-04 | General Electric Company | Optimized aircraft control via model-based iterative optimization |
| US10460608B2 (en) * | 2017-05-25 | 2019-10-29 | Ge Aviation Systems Llc | System and method for determining uncertainty in a predicted flight path for an aerial vehicle |
| EP3710901B1 (en) | 2017-11-14 | 2022-08-03 | Gulfstream Aerospace Corporation | Potential aircraft trajectory wind effect computation |
| CN107871047A (zh) * | 2017-11-21 | 2018-04-03 | 中国人民解放军战略支援部队航天工程大学 | 一种复杂空间系统安全管理平行计算方法 |
| US10573186B2 (en) | 2017-12-12 | 2020-02-25 | Honeywell International Inc. | System and method for monitoring conformance of an aircraft to a reference 4-dimensional trajectory |
| CN112334964B (zh) * | 2018-05-04 | 2023-02-21 | 交互数字专利控股公司 | 基于市场的检测和规避(daa)解决方案 |
| EP3608894A1 (en) * | 2018-08-10 | 2020-02-12 | The Boeing Company | Computer-implemented method and system for evaluating uncertainty in trajectory prediction |
| WO2020091778A1 (en) * | 2018-11-01 | 2020-05-07 | Hewlett-Packard Development Company, L.P. | Printing device component status classification |
| US11024182B2 (en) * | 2018-12-17 | 2021-06-01 | The Boeing Company | System and method to forecast flight delay based on real-time data |
| JP7228229B2 (ja) * | 2018-12-20 | 2023-02-24 | 国立研究開発法人宇宙航空研究開発機構 | プログラム、情報処理装置及び情報処理方法 |
| EP3905431A4 (en) | 2018-12-29 | 2022-09-14 | Spacety Co., Ltd (Changsha) | INFLATABLE ANTENNA |
| US20200312171A1 (en) * | 2019-03-29 | 2020-10-01 | Honeywell International Inc. | Systems and methods for dynamically detecting moving object trajectory conflict using estimated times of arrival |
| US10969227B2 (en) * | 2019-08-09 | 2021-04-06 | The Boeing Company | Display of aircraft time on target on mobile devices |
| CN110929945B (zh) * | 2019-11-28 | 2023-07-04 | 海南太美航空股份有限公司 | 一种航线开通的预测方法、系统及电子设备 |
| CN111613096B (zh) * | 2020-06-04 | 2021-07-30 | 成都民航空管科技发展有限公司 | 一种基于atc系统的cfl指令预先告警方法和系统 |
| CN111783358B (zh) * | 2020-07-02 | 2022-10-04 | 哈尔滨工业大学 | 一种基于贝叶斯估计的高超速飞行器长期轨迹预报方法 |
| US11952149B2 (en) * | 2020-09-17 | 2024-04-09 | General Electric Company | System and method of forecasting aircraft engine operational data for predictive analytics |
| CN112885155B (zh) * | 2021-01-18 | 2024-10-08 | 中国人民解放军空军工程大学 | 一种融合空域内无人机飞行碰撞风险评估方法 |
| CN112785876B (zh) * | 2021-01-28 | 2022-03-11 | 南京航空航天大学 | 终端区时序气象场景智能识别系统 |
| CN113378306B (zh) * | 2021-08-13 | 2021-12-03 | 腾讯科技(深圳)有限公司 | 交通控制方法、装置、电子设备及计算机可读存储介质 |
| DE102021212857A1 (de) * | 2021-11-16 | 2023-05-17 | Robert Bosch Gesellschaft mit beschränkter Haftung | Computerimplementiertes Verfahren, Vorrichtung und Computerprogramm zum Bestimmen von Trajektorien aus einer Menge von Trajektorien für Messungen an einem technischen System |
| CN114860111B (zh) * | 2022-05-23 | 2024-06-18 | Oppo广东移动通信有限公司 | 触控轨迹的更新方法、装置、电子设备及存储介质 |
| US20230401964A1 (en) * | 2022-06-09 | 2023-12-14 | The Boeing Company | Stochastic flight planning systems and methods |
| CN115310677B (zh) * | 2022-07-18 | 2023-05-12 | 四川大学 | 一种基于二进制编码表示与多分类的航迹预测方法及装置 |
| CN115097868B (zh) * | 2022-08-24 | 2022-11-22 | 深圳市瓴鹰智能科技有限公司 | 一种飞行控制方法及相关装置 |
| CN115145313B (zh) * | 2022-08-31 | 2023-01-31 | 中国电子科技集团公司第二十八研究所 | 一种实时预测纠正动目标轨迹的方法 |
| CN115442743B (zh) * | 2022-11-07 | 2023-03-24 | 上海特金信息科技有限公司 | 基于rid信号数据融合的定位方法、装置、设备 |
| CN117053800B (zh) * | 2023-10-09 | 2024-01-09 | 中国气象科学研究院 | 用于气象观测的无人机航路规划方法、装置、设备及介质 |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6289277B1 (en) * | 1999-10-07 | 2001-09-11 | Honeywell International Inc. | Interfaces for planning vehicle routes |
| US7248949B2 (en) * | 2004-10-22 | 2007-07-24 | The Mitre Corporation | System and method for stochastic aircraft flight-path modeling |
| FR2908533B1 (fr) * | 2006-11-14 | 2008-12-26 | Thales Sa | Methode et systeme de surveillance du suivi d'une trajectoire de reference par un aeronef |
| EP2040137B1 (en) | 2007-09-21 | 2012-05-16 | The Boeing Company | Predicting aircraft trajectory |
| FR2926894B1 (fr) * | 2008-01-25 | 2010-03-12 | Thales Sa | Procede d'estimation en tout point d'un trajet d'un aeronef des donnees atmospheriques |
| US9257048B1 (en) * | 2010-04-21 | 2016-02-09 | The Boeing Company | Aircraft emergency landing route system |
| US8818576B2 (en) * | 2010-09-30 | 2014-08-26 | The Boeing Company | Tailored arrivals allocation system trajectory predictor |
| US8560148B2 (en) * | 2010-11-09 | 2013-10-15 | Lockheed Martin Corporation | Method and apparatus for air traffic trajectory synchronization |
| US8924137B2 (en) * | 2011-09-30 | 2014-12-30 | Lockheed Martin Corporation | Method and apparatus for dynamic air traffic trajectory synchronization |
| EP2482269B1 (en) * | 2011-01-28 | 2017-03-22 | The Boeing Company | Providing data for predicting aircraft trajectory |
| US8942914B2 (en) * | 2011-02-22 | 2015-01-27 | General Electric Company | Methods and systems for managing air traffic |
| US9177480B2 (en) * | 2011-02-22 | 2015-11-03 | Lockheed Martin Corporation | Schedule management system and method for managing air traffic |
| US8818696B2 (en) * | 2011-03-23 | 2014-08-26 | Ge Aviation Systems Llc | Method and system for aerial vehicle trajectory management |
| US8600675B1 (en) * | 2011-05-25 | 2013-12-03 | Rockwell Collins, Inc. | System and method for generating trajectory data for an aircraft in flight |
| US9117368B2 (en) * | 2011-09-09 | 2015-08-25 | Honeywell International Inc. | Ground based system and methods for providing multiple flightplan re-plan scenarios to a pilot during flight |
| US8639401B2 (en) * | 2011-09-20 | 2014-01-28 | The Boeing Company | Dynamic adaptation of trigger thresholds to manage when data messages are transmitted |
| US9098997B2 (en) * | 2011-09-30 | 2015-08-04 | The Boeing Company | Flight trajectory prediction with application of environmental conditions |
| US8798898B2 (en) * | 2011-10-31 | 2014-08-05 | General Electric Company | Methods and systems for inferring aircraft parameters |
| CN102436764A (zh) * | 2011-11-21 | 2012-05-02 | 南京莱斯信息技术股份有限公司 | 通过历史数据挖掘航班管制因素的方法 |
| US9558670B1 (en) * | 2011-12-06 | 2017-01-31 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Method and system for air traffic rerouting for airspace constraint resolution |
| AU2012350148A1 (en) * | 2011-12-06 | 2014-06-26 | Airservices Australia | A flight prediction system |
| EP2667273A1 (en) * | 2012-05-24 | 2013-11-27 | The Boeing Company | Method for providing a description of aircraft intent using a decomposition of flight intent into constrained flight segments |
| EP2667274A1 (en) * | 2012-05-24 | 2013-11-27 | The Boeing Company | Method for providing a description of aircraft intent using a decomposition of flight intent into flight segments |
| EP2667275B1 (en) * | 2012-05-24 | 2023-03-22 | The Boeing Company | Method for providing a description of aircraft intent using a decomposition of flight intent into flight segments with optimal parameters |
| EP2743739B1 (en) * | 2012-12-14 | 2017-10-04 | The Boeing Company | Using aircraft trajectory data to infer atmospheric conditions |
| EP2768275B1 (en) * | 2013-02-13 | 2018-01-10 | The Boeing Company | Secure transmission of an aircraft trajectory |
| US10013236B2 (en) * | 2013-03-06 | 2018-07-03 | The Boeing Company | Real-time adaptive speed scheduler |
| US9177479B2 (en) * | 2013-03-13 | 2015-11-03 | General Electric Company | System and method for determining aircraft operational parameters and enhancing aircraft operation |
| FR3003971B1 (fr) * | 2013-03-28 | 2017-02-17 | Airbus Operations Sas | Procede et dispositif de calcul de predictions sur un plan de vol d'un aeronef. |
| EP2801963B1 (en) * | 2013-05-09 | 2016-01-20 | The Boeing Company | Providing a description of aircraft intent |
| ES2758738T3 (es) * | 2013-05-17 | 2020-05-06 | Boeing Co | Método y sistema para guía de aeronave |
| US8977484B1 (en) * | 2013-08-22 | 2015-03-10 | The Boeing Company | Using aircraft trajectory data to infer aircraft intent |
| EP2887015A1 (en) * | 2013-12-18 | 2015-06-24 | The Boeing Company | Assessing feasability of an aircraft trajectory |
| ES2668896T3 (es) * | 2013-12-31 | 2018-05-23 | The Boeing Company | Sistema y método para definir y predecir trayectorias de aeronave |
| EP2947637B1 (en) * | 2014-05-23 | 2018-09-26 | The Boeing Company | Method of predicting with high accuracy a descent trajectory described by means of the aircraft intent description language (AIDL) |
| EP3010005B1 (en) * | 2014-10-14 | 2021-05-19 | The Boeing Company | Method for creating and choosing a determinate piloting strategy for an aircraft |
| US9536434B2 (en) * | 2014-12-12 | 2017-01-03 | The Boeing Company | Aircraft turns for interval management |
| US9646503B2 (en) * | 2015-02-11 | 2017-05-09 | Honeywell International Inc. | Cockpit display systems and methods for generating navigation displays including landing diversion symbology |
| EP3065019B1 (en) * | 2015-03-04 | 2017-09-13 | The Boeing Company | Method for optimum maximum range cruise speed in an aircraft |
| US9536435B1 (en) * | 2015-07-13 | 2017-01-03 | Double Black Aviation Technology L.L.C. | System and method for optimizing an aircraft trajectory |
| US10269253B2 (en) * | 2015-07-16 | 2019-04-23 | Ge Aviation Systems Llc | System and method of refining trajectories for aircraft |
| US10586464B2 (en) * | 2015-07-29 | 2020-03-10 | Warren F. LeBlanc | Unmanned aerial vehicles |
| US10852157B2 (en) * | 2015-07-30 | 2020-12-01 | The Boeing Company | Guidance display for controlling aircraft turns for aircraft spacing |
| EP3136371B1 (en) * | 2015-08-31 | 2024-04-17 | The Boeing Company | Air vehicle navigation method via a common runtime aircraft intent data structure |
-
2013
- 2013-12-31 ES ES13382579.4T patent/ES2668896T3/es active Active
- 2013-12-31 EP EP13382579.4A patent/EP2889579B1/en active Active
-
2014
- 2014-11-24 CN CN201480071997.8A patent/CN105874479B/zh active Active
- 2014-11-24 BR BR112016011555-4A patent/BR112016011555B1/pt active IP Right Grant
- 2014-11-24 WO PCT/IB2014/066292 patent/WO2015101848A2/en active Application Filing
- 2014-11-24 JP JP2016543132A patent/JP6553625B2/ja active Active
- 2014-11-24 US US15/109,319 patent/US9741254B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN105874479B (zh) | 2019-09-24 |
| ES2668896T3 (es) | 2018-05-23 |
| US9741254B2 (en) | 2017-08-22 |
| CN105874479A (zh) | 2016-08-17 |
| JP6553625B2 (ja) | 2019-07-31 |
| BR112016011555A2 (pt) | 2017-08-08 |
| US20160343258A1 (en) | 2016-11-24 |
| EP2889579B1 (en) | 2018-02-14 |
| EP2889579A1 (en) | 2015-07-01 |
| WO2015101848A2 (en) | 2015-07-09 |
| WO2015101848A3 (en) | 2016-05-12 |
| JP2017503272A (ja) | 2017-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016011555B1 (pt) | Método e sistema para definir e predizer trajetória de aeronaves | |
| EP3186662B1 (en) | Measuring traffic speed in a road network | |
| Zheng et al. | Probabilistic range queries for uncertain trajectories on road networks | |
| Fei et al. | An improved BPNN method based on probability density for indoor location | |
| Hamed et al. | Statistical prediction of aircraft trajectory: regression methods vs point-mass model | |
| CN105122153A (zh) | 用于油藏性能的改进估算的油藏历史匹配的方法和系统 | |
| Kamrani et al. | Using on-line simulation for adaptive path planning of UAVs | |
| Delahaye et al. | Trajectory mathematical distance applied to airspace major flows extraction | |
| Chen et al. | Cooperative navigation of unmanned aerial vehicle swarm based on cooperative dilution of precision | |
| Atia et al. | Particle‐Filter‐Based WiFi‐Aided Reduced Inertial Sensors Navigation System for Indoor and GPS‐Denied Environments | |
| Lin et al. | Approach for 4-d trajectory management based on HMM and trajectory similarity | |
| Zhu et al. | A MEMS gyroscope noise suppressing method using neural architecture search neural network | |
| Chen et al. | A three-stage online map-matching algorithm by fully using vehicle heading direction | |
| Xie et al. | Distance measure to cluster spatiotemporal scenarios for strategic air traffic management | |
| Bastas et al. | Data driven aircraft trajectory prediction with deep imitation learning | |
| Yan et al. | Light detection and ranging/inertial measurement unit-integrated navigation positioning for indoor mobile robots | |
| Monteiro et al. | 4D trajectory conflict detection and resolution using decision tree pruning method | |
| Batista et al. | A Gaussian sampling heuristic estimation model for developing synthetic trip sets | |
| Yin et al. | Positioning Errors Predicting Method of Strapdown Inertial Navigation Systems Based on PSO‐SVM | |
| González-Arribas et al. | Multiobjective optimisation of aircraft trajectories under wind uncertainty using GPU parallelism and genetic algorithms | |
| Bombelli et al. | Improved clustering for route-based eulerian air traffic modeling | |
| Liu et al. | Particle swarm optimization for vehicle positioning based on robust cubature Kalman filter | |
| Collin et al. | A multiobjective systems architecture model for sensor selection in autonomous vehicle navigation | |
| Van Erp et al. | Macroscopic Traffic State Estimation: Understanding Traffic Sensing Data‐Based Estimation Errors | |
| Xu et al. | Aircraft trajectory prediction for terminal airspace employing social spatiotemporal graph convolutional network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 24/11/2014, OBSERVADAS AS CONDICOES LEGAIS. |