BR112016001161B1 - Método e sistema para a perfuração de um furo de poço e meio legível por computador não transitório - Google Patents
Método e sistema para a perfuração de um furo de poço e meio legível por computador não transitório Download PDFInfo
- Publication number
- BR112016001161B1 BR112016001161B1 BR112016001161-9A BR112016001161A BR112016001161B1 BR 112016001161 B1 BR112016001161 B1 BR 112016001161B1 BR 112016001161 A BR112016001161 A BR 112016001161A BR 112016001161 B1 BR112016001161 B1 BR 112016001161B1
- Authority
- BR
- Brazil
- Prior art keywords
- path
- wellbore path
- actual
- wellbore
- control module
- Prior art date
Links
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B44/00—Automatic control systems specially adapted for drilling operations, i.e. self-operating systems which function to carry out or modify a drilling operation without intervention of a human operator, e.g. computer-controlled drilling systems; Systems specially adapted for monitoring a plurality of drilling variables or conditions
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B44/00—Automatic control systems specially adapted for drilling operations, i.e. self-operating systems which function to carry out or modify a drilling operation without intervention of a human operator, e.g. computer-controlled drilling systems; Systems specially adapted for monitoring a plurality of drilling variables or conditions
- E21B44/005—Below-ground automatic control systems
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B44/00—Automatic control systems specially adapted for drilling operations, i.e. self-operating systems which function to carry out or modify a drilling operation without intervention of a human operator, e.g. computer-controlled drilling systems; Systems specially adapted for monitoring a plurality of drilling variables or conditions
- E21B44/02—Automatic control of the tool feed
- E21B44/04—Automatic control of the tool feed in response to the torque of the drive ; Measuring drilling torque
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B44/00—Automatic control systems specially adapted for drilling operations, i.e. self-operating systems which function to carry out or modify a drilling operation without intervention of a human operator, e.g. computer-controlled drilling systems; Systems specially adapted for monitoring a plurality of drilling variables or conditions
- E21B44/02—Automatic control of the tool feed
- E21B44/06—Automatic control of the tool feed in response to the flow or pressure of the motive fluid of the drive
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B45/00—Measuring the drilling time or rate of penetration
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/02—Determining slope or direction
- E21B47/024—Determining slope or direction of devices in the borehole
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B49/00—Testing the nature of borehole walls; Formation testing; Methods or apparatus for obtaining samples of soil or well fluids, specially adapted to earth drilling or wells
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH DRILLING; MINING
- E21B—EARTH DRILLING, e.g. DEEP DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/04—Directional drilling
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C7/00—Tracing profiles
- G01C7/06—Tracing profiles of cavities, e.g. tunnels
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B15/00—Systems controlled by a computer
- G05B15/02—Systems controlled by a computer electric
Abstract
perfuração de fundo de poço automatizada utilizando formato e energia de perfil de furo de poço divulgados são sistemas e método para a automação de perfuração no fundo de poço com base no perfil e energia do furo de poço sendo perfurado. um método inclui avançar uma coluna subsuperficial (bha) dentro de uma formação subterrânea e formar desse modo um furo de poço ao longo de um caminho real de furo de poço, a bha incluindo um módulo de controle, um ou mais sensores e um conjunto direcional, tomar medições de levantamento com os sensores em duas ou mais estações de levantamento ao longo do caminho real de furo de poço, comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado, determinar um caminho de retorno com base em energia mínima do caminho real de furo de poço quando o caminho real de furo de poço tiver desviado do caminho de furo de poço planejado e transmitir um sinal de comando corretivo ao conjunto direcional a fim de reorientar uma trajetória do caminho real de furo de poço de tal forma que ele retorne para o caminho de furo de poço planejado.
Description
[0001] A presente divulgação é relacionada à perfuração de fundos de poço e, mais particularmente, à perfuração de fundos de poço automatizada com base no perfil e energia do furo de poço sendo perfurado.
[0002] A qualidade de um furo de poço ou poço de perfuração está geralmente relacionada com a "lisura" do furo de poço. Diversos modelos de trajetória para a perfuração de um furo de poço foram propostos, com graus variantes de lisura do furo de poço resultante. O modelo mais simples, o modelo tangencial, consiste em seções de linha reta. Assim, a inclinação deste modelo é descontínua nos pontos de levantamento ao longo do comprimento do furo de poço. Outro modelo comum é o modelo de curvatura mínima, que consiste em arcos circulares. Este modelo tem um declive contínuo, mas curvatura descontínua. De longe o método mais comum para a modelagem de trajetória e análise de perfuração é o modelo de "torque-arraste" que calcula a carga adicional durante as operações de inserção e remoção onde o torque é devido à rotação da coluna de perfuração e arraste é a carga em excesso em comparação ao peso de coluna de perfuração rotativo devido ao atrito gerado pelo contato de coluna de perfuração com o furo de poço.
[0003] A lisura do furo de poço pode manifestar-se em um número de maneiras, todas afetando negativamente a eficiência do processo de perfuração e aumentando os custos de conclusão do poço e perfuração. Atualmente, diferentes parâmetros tais como tortuosidade de furo de poço, curvatura, torção e diversos índices de perfuração também são utilizados ou para quantificar o caminho de furo de poço ou estimar a dificuldade da perfuração de um poço liso. Ademais, não há nenhum critério claro para definir a qualidade do furo de poço. Por exemplo, índices dePetição 870210094548, de 13/10/2021, pág. 7/7 perfuração que são considerados geralmente descrevem a qualidade do poço de perfuração mais subjetivamente em vez de quantificar qualitativamente o poço de perfuração. Em alguns casos, índices de perfuração são usados meramente como uma medida de quão difícil será o poço para perfurar, e não quão suavemente pode ser perfurado.
[0004] Hoje, operações de perfuração controladas por computador autônomas (ou seja,, "automação de perfuração") estão se aproximando da realidade porque prometem poupar tempo na plataforma e proporcionar benefícios financeiros ao operador de poço implementando automaticamente um modelo de trajetória do furo de poço. Quando a real trajetória do furo de poço desvia do caminho de furo de poço planejado, é imperativo que um sistema tome ações corretivas. Por exemplo, controle proporcional-integral-derivativo (PID) usado em poços hoje podem prover feedback negativo para as ferramentas de perfuração de direção rotativas de modo a trazer o caminho de perfuração desviado de volta à trilha planejada. No entanto, excessos e ondulações são muitas vezes observados no controle PID.
[0005] As seguintes figuras são incluídas para ilustrar certos aspectos da presente divulgação, e não devem ser vistos como modalidades exclusivas. O assunto divulgado está suscetível a modificações, alterações, combinações consideráveis e seus equivalentes em forma e em função, sem desviar-se do escopo desta divulgação.
[0006] A FIG. 1 ilustra um sistema de perfuração exemplar que pode empregar um ou mais princípios da presente divulgação.
[0007] A FIG. 2 ilustra uma coluna subsuperficial exemplar, de acordo com uma ou mais modalidades da presente divulgação.
[0008] A FIG. 3 retrata um caminho de furo de poço exemplar que pode ser formado pela implementação dos princípios da presente divulgação, de acordo com uma ou mais modalidades.
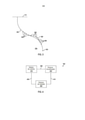
[0009] A FIG. 4 ilustra um diagrama esquemático simplificado de um sistema que esteja configurado para executar os métodos descritos neste documento, de acordo com uma ou mais modalidades.
[0010] A FIG. 5 é um diagrama esquemático simplificado de um módulo de controle, de acordo com uma ou mais modalidades.
[0011] A FIG. 6 é um fluxograma esquemático de um método de automatização das operações de perfuração, de acordo com uma ou mais modalidades.
[0012] A presente divulgação é relacionada à perfuração de fundos de poço e, mais particularmente, à perfuração de fundos de poço automatizada com base no perfil e energia do furo de poço sendo perfurado.
[0013] São divulgados sistemas e o método de automatização das operações de perfuração com base na energia de perfil do poço de modo que um poço mais liso seja perfurado. Os sistemas divulgados incluem um módulo de controle que pode ser acoplado de forma comunicável a um sistema de medição e um sistema de perfuração. O sistema de medição pode atualizar o módulo de controle em tempo real no que se refere à localização de um caminho real de furo de poço em comparação com um caminho de furo de poço planejado. Quando o caminho real de furo de poço tiver desviado do caminho de furo de poço planejado, o módulo de controle pode ser configurado para determinar um caminho de retorno com base na energia mínima do caminho real de furo de poço e transportando um ou mais sinais de comando corretivos para o conjunto direcional a fim de reorientar uma trajetória do caminho real de furo de poço de tal forma que ele retorne para o caminho de furo de poço planejado. O caminho de retorno é calculado usando um modelo de trajetória com base no critério de energia mínima do furo de poço a fim de minimizar excessos e ondulações de trajetórias de poço. Como será apreciado, uma abordagem com base em energia para devolver o caminho real do furo de poço para o caminho do furo de poço planejado pode ser uma forma confiável de automatizar sistemas de perfuração do fundo de poço de modo que utilização ideal do equipamento de perfuração seja alcançada.
[0014] Referindo-se à FIG. 1, é ilustrado um sistema de perfuração exemplar 100 que pode empregar um ou mais princípios da presente divulgação. Poços de perfuração podem ser criados pela perfuração da terra 102 usando o sistema de perfuração 100. O sistema de perfuração 100 pode ser configurado para conduzir uma coluna subsuperficial (BHA) 104 posicionada ou caso contrário disposta na parte inferior de uma coluna de perfuração 106 estendida até a terra 102 de uma torre de perfuração (derrick) 108 disposta na superfície 110. A torre de perfuração 108 inclui uma haste de perfuração (kelly) 112 usado para abaixar e levantar a coluna de perfuração 106.
[0015] A BHA 104 pode incluir uma broca de perfuração 114 acoplada operativamente a uma coluna de ferramenta 116 que pode ser movida axialmente dentro de um furo de poço perfurado 118 conforme anexado à coluna de perfuração 106. Durante a operação, a broca de perfuração 114 penetra a terra 102 e cria, desse modo, o furo de poço 118. A BHA 104 provê controle direcional da broca de perfuração 114 à medida que ele avança para a terra 102. A coluna de ferramenta 116 pode ser montada de forma semipermanente com diversas ferramentas de medição (não mostradas), tais como, mas não limitadas a medição durante a perfuração (MWD) e ferramentas de perfilagem durante a perfuração (LWD), que pode ser configurado para fazer as medições de fundo de poço de condições de perfuração. Em outras modalidades, as ferramentas de medição podem ser autocontidas dentro da coluna de ferramenta 116, como indicado na FIG. 1.
[0016] Fluido ou "lama" a partir de um tanque de lama 120 pode ser bombeado poço abaixo usando uma bomba de lama 122 alimentada por uma fonte de energia adjacente, tais como uma força motora ou motor principal 124. A lama pode ser bombeada a partir do tanque de lama 120, através de um tubo bengala 126, que alimenta a lama para dentro da coluna de perfuração 106 e transmite a mesma para a broca de perfuração 114. A lama sai de um ou mais bocais dispostos na broca de perfuração 114 e no processo resfria a broca de perfuração 114. Após sair da broca de perfuração 114, a lama circula de volta à superfície 110 através do anel definido entre o furo de poço 118 e a coluna de perfuração 106 e no processo devolve detritos de perfuração e entulho à superfície. A mistura de lama e detritos é passada através de uma linha de fluxo 128 e é processada de tal forma que uma lama limpa é devolvida poço abaixo através do tubo bengala 126 mais uma vez.
[0017] Embora o sistema de perfuração 100 seja mostrado e descrito no que diz respeito a um sistema de perfuração rotativa na FIG. 1, aqueles versados na técnica compreenderão que muitos tipos de sistemas de perfuração podem ser empregados no cumprimento de modalidades da divulgação. Por exemplo, brocas de perfuração e plataformas de perfuração usadas em modalidades da divulgação podem ser usadas em terra (como descrito na FIG. 1) ou no mar (não mostrado). Plataformas de petróleo marítimas que podem ser utilizadas em conformidade com as modalidades da divulgação incluem, por exemplo, flutuadores, plataformas fixas, estruturas com base na gravidade, navios-sonda, plataformas semi- submersíveis, plataformas de perfuração autoelevatórias, plataforma de pernas atirantadas e semelhantes. Será apreciado que modalidades da divulgação podem ser aplicadas a plataformas variando de tamanho pequeno e portátil, até volumosa e permanente.
[0018] Adicionalmente, embora descritos neste documento no que diz respeito à perfuração de petróleo, diversas modalidades da divulgação podem ser usadas em muitas outras aplicações. Por exemplo, métodos divulgados podem ser usados em perfuração para a exploração mineral, investigação ambiental, extração de gás natural, instalação subterrânea, operações de mineração, poços de água, poços geotérmicos e semelhantes. Além disso, modalidades da divulgação podem ser utilizadas em conjuntos de peso sobre os vedadores, em suspensores do revestimento de produção em funcionamento, em colunas de completação em funcionamento, etc., sem desviar do escopo da divulgação.
[0019] Referindo-se agora à FIG. 2, com referência contínua à FIG. 1, é ilustrada uma coluna subsuperficial exemplar (BHA) 104 que pode ser utilizada em conformidade com uma ou mais modalidades da presente divulgação. Como ilustrado, a BHA 104 pode incluir pelo menos a broca de perfuração 114, um conjunto direcional 202 acoplado operativamente à broca de perfuração 114, uma ferramenta MWD/LWD 204 e um colar de perfuração 206. O conjunto direcional 202 pode ser qualquer tipo de sistema de direção de fundo de poço ou dispositivo configurado para orientar a broca de perfuração 114 de tal forma que uma trajetória planejada ou caminho de furo de poço seja seguido. Em algumas modalidades, o conjunto direcional 202 pode ser uma ferramenta orientável rotativa. Em outras modalidades, o conjunto direcional 202 pode ser um motor de lama ou qualquer outro dispositivo ou sistema conhecido que pode reorientar a trajetória da broca de perfuração 114, sem desviar do escopo da divulgação.
[0020] A ferramenta MWD/LWD 204 pode incluir um pacote de sensor MWD que pode incluir uma ou mais sondas de levantamento 207 configuradas para coletar e transmitir informações direcionais, informações mecânicas, informações de formação e semelhantes. Em particular, as uma ou mais sondas de levantamento 207 podem incluir um ou mais sensores internos ou externos tais como, mas não limitados a, um inclinômetro, um ou mais magnetômetros, (ou seja, unidades de bússola), um ou mais acelerômetros, um sensor de posição do eixo, suas combinações e semelhantes. Informações direcionais (ou seja, trajetória de furo de poço no espaço tridimensional) da BHA 104 dentro da terra 102 (FIG. 1), tais como inclinação e azimute, podem ser obtidas em tempo real usando as sondas de levantamento 207.
[0021] A ferramenta MWD/LWD 204 pode incluir, adicionalmente, um pacote de sensor LWD que pode incluir um ou mais sensores configurados para medir parâmetros de formação, tais como resistividade, porosidade, velocidade de propagação sônica ou transmissibilidade de raios gama. Em algumas modalidades, as ferramentas MWD e LWD e seus pacotes de sensor relacionados, podem estar em comunicação com outro para compartilhar dados coletados entre estes. A ferramenta MWD/LWD 204 pode ser movido a bateria ou movido a gerador, como conhecido na técnica, e quaisquer medidas obtidas a partir da ferramenta MWD/LWD 204 podem ser processadas ou na superfície 110 (FIG. 1) ou em um local do fundo de poço.
[0022] O colar de perfuração 206 pode ser configurado para adicionar peso à BHA 104 acima da broca de perfuração 114 de modo que haja peso suficiente sobre a broca de perfuração 114 para perfurar as formações geológicas necessárias. Peso também pode ser aplicado à broca de perfuração 114 através da coluna de perfuração 106 conforme estendido a partir da superfície 110.
[0023] A BHA 104 pode incluir, adicionalmente, um sub de sensor 208 acoplado a ou, caso contrário, formando parte da BHA 104. Os subs de sensor 208 podem ser configurados para monitorar diversos parâmetros operacionais no ambiente de fundo de poço em relação à BHA 104. Por exemplo, o sub de sensor 208 pode ser configurado para monitorar os parâmetros operacionais da broca de perfuração 114, tais como, mas não limitados a, peso sobre a broca (WOB), torque na broca (TOB), rotações por minuto (RPM) da broca de perfuração 114, momento de dobra da coluna de perfuração 106, vibração afetando potencialmente a broca de perfuração 114 e semelhantes. Em algumas modalidades, o sub de sensor 208 pode ser uma ferramenta DRILLDOC® comercialmente disponível a partir da Sperry Drilling de Houston, Texas, EUA. A ferramenta DRILLDOC® ou outro tipo similar de sub de sensor 208 pode ser configurada para prover medições em tempo real de peso, torque e dobra sobre a ferramenta de corte adjacente (ou seja, a broca de perfuração 114) e/ou coluna de perfuração 106 para caracterizar a transferência de energia da superfície para a ferramenta de corte e/ou coluna de perfuração 106. Conforme será apreciado, estas medições ajudam a otimizar os parâmetros da perfuração para maximizar o desempenho e minimizar a vibração e a transferência de energia desperdiçada.
[0024] A BHA 104 pode incluir, adicionalmente, um módulo de controle 210 acoplado a ou, caso contrário, formando parte da BHA 104. O módulo de controle 210 pode ser um sistema de computador do fundo de poço acoplado de forma comunicável a cada um dos subs de sensor 208, a ferramenta MWD/LWD 204 (por exemplo, sua(s) sonda(s) de levantamento 207), e o conjunto direcional 202 através de uma ou mais linhas de comunicação 212. Através das linhas de comunicação, 212, o módulo de controle 210 pode ser configurado para enviar e receber dados e comandos de/para o sub de sensor 208, a ferramenta MWD/LWD 204 e o conjunto direcional 202 em tempo real.
[0025] Em algumas modalidades, o módulo de controle 210 pode, adicionalmente, ser acoplado de forma comunicável à superfície 110 (FIG. 1) através de uma ou mais linhas de comunicação 214 de tal forma que seja capaz de enviar e receber dados em tempo real de/para a superfície 110 (FIG. 1) durante a operação. As linhas de comunicação 212, 214 podem ser qualquer tipo de dispositivos ou meios de telecomunicações com fio conhecidos pelos versados na técnica, tais como, mas não se limitando a, fios ou linhas elétricas, linhas de fibra óptica, etc. Alternativamente ou adicionalmente, o módulo de controle 210 pode incluir ou caso contrário ser um módulo de telemetria usado para transmitir medições à superfície 110 sem fio, se desejado, usando uma ou mais técnicas de telemetria de fundo de poço incluindo, mas não se limitando a, pulso de lama, frequência eletromagnética, acústica, suas combinações e semelhantes.
[0026] Referindo-se agora à FIG. 3, com referência continuada às FIGS. 1 e 2, é ilustrado um caminho de furo de poço exemplar 300 que pode ser formado pela implementação dos princípios da presente divulgação, de acordo com uma ou mais modalidades. Mais especificamente, o caminho do furo de poço 300 representa um caminho ou trajetória planejada ou projetada para a perfuração de um furo de poço (por exemplo, furo de poço 118 da FIG. 1) a fim de atingir um local de destino 302 dentro de uma formação subterrânea 304. O furo de poço pode ser perfurado usando a BHA 104 e a coluna de perfuração 106 descrita acima com referência às FIGS. 1 e 2. Durante operações de perfuração exemplares, o módulo de controle 210 (FIG. 2) pode ser configurado para comunicar-se continuamente com o conjunto direcional 202 (FIG. 2) de tal forma que a broca de perfuração114 é orientada para seguir o caminho do furo de poço planejado 300.
[0027] Como é frequentemente o caso, no entanto, a coluna de ferramenta pode desviar-se do caminho original do furo de poço projetado 300 e em vez disso, um caminho real de furo de poço 306 pode resultar em estar desalinhado com ou caso contrário divergir do caminho original do furo de poço 300. Tais desvios podem resultar de diversas variáveis indiretas tais como, mas não limitadas a, a taxa de penetração da coluna de ferramenta, a deflexão da coluna de ferramenta dentro de tipos de rochas e/ou formações variantes, a configuração de face da ferramenta, rotação da coluna de ferramenta (ou seja, deslizante ou rotativa, dependendo do tipo de motor de perfuração), o peso sobre a broca de perfuração 114, a taxa de fluidos de fluidos de perfuração através e em torno da coluna de ferramenta, o desgaste da broca de perfuração 114 e outras ferramentas na BHA 104, vibração na coluna de perfuração 106, suas combinações e semelhantes.
[0028] À medida que a coluna de ferramenta avança naformação 304, a BHA 104 pode ser configurada para tomar medições de levantamento em diversos pontos 308 ao longo do caminho real de furo de poço 306 a fim de determinar exatamente onde se encontra a coluna de ferramenta e se o caminho real de furo de poço 306 está seguindo o caminho do furo de poço projetado 300 dentro da formação 304. Medições de levantamento podem ser efetuadas periodicamente à medida que a coluna de ferramenta avança, tal como a cada 45 pés, a cada 75 pés, a cada 90 pés ou a qualquer distância ou frequência desejada pelo operador de poço. Tais medições de levantamento podem informar um operador de poço (ou um sistema automatizado tal como o módulo de controle 210 da FIG. 2) em tempo real sobre se mudanças direcionais são necessárias a fim de reorientar a trajetória do caminho real de furo de poço 306 e, desse modo, trazer de volta ao alinhamento com o caminho do furo de poço projetado 300.
[0029] Embora possa haver vários métodos de redirecionar a coluna de ferramenta de tal forma que o caminho real de furo de poço 306 seja capaz de retornar e seguir o caminho de furo de poço projetado 300, a presente divulgação provê um modelo de controle de trajetória que o faz com base no critério de energia mínima de furo de poço a fim de minimizar os excessos e ondulações de trajetórias de poço. Parâmetros de processo que são levados em consideração incluem o comprimento entre estações de levantamento 308, a taxa de mudança de inclinação entre estações de levantamento 308 e a taxa de mudança de azimute entre estações de levantamento 308. Pelo menos um do método tangencial equilibrado, o método de curvatura mínima e o método da curva natural pode ser usado para calcular estes parâmetros. Aplicando-se as condições de energia mínima do furo de poço, uma solução exclusiva desses parâmetros pode ser obtida, resultando desse modo em utilização ideal do equipamento de coluna de ferramenta e um furo de poço mais liso.
[0030] Pode provar-se adicionalmente vantajoso automatizar tais operações tal que a intervenção do operador de poço a partir da superfície é geralmente desnecessária. Em vez disso, um sistema de computador do fundo de poço, tal como o módulo de controle 210 (FIG. 2) pode redirecionar autonomamente as trajetórias de fundo de poço automaticamente com base nas medições de levantamento atualizadas. Em outras palavras, de acordo com a presente divulgação, o módulo de controle 210 pode ser provido com atualizações em tempo real de onde a coluna de ferramenta está localizada no que diz respeito ao caminho de furo de poço planejado 300 e, quando necessário, pode ser configurado para determinar um caminho de retorno que apresenta energia mínima de furo de poço incremental.
[0031] A fim de alcançar um retorno de energia mínimo para o caminho de furo de poço projetado 300, a curvatura e a torção do caminho real de furo de poço 306 voltando para o caminho de furo de poço projetado 300 deve ser minimizado. Critério matemático com base em energia usado para quantificar a complexidade de um projeto do caminho de furo de poço tipicamente usa o raciocínio físico em vez do significado geométrico de um caminho de furo de poço. A modelagem da curva não linear de um feixe fino e elástico, por exemplo, é conhecida como a curva de energia mínima e caracteriza-se pela dobra pelo menos ao passar por um determinado conjunto de pontos. Considera-se critério excelente considerando a simplicidade para a produção de curvas lisas. Portanto, este critério pode ser usado para descrever a energia mínima do caminho real de furo de poço 306 voltando para o caminho de furo de poço projetado 300. Uma vantagem adicionada é que ele pode ser usado para enfatizar a ondulação da curvatura de projetos de caminho do furo de poço de furo de poço afiado obtidos usando métodos convencionais.
[0032] A energia de deformação (Es) de um caminho de furo de poço (por exemplo, o caminho real de furo de poço 306 voltando para o caminho de furo de poço projetado 300) é dada como a integral de comprimento de arco da curvatura (K) ao quadrado:
[0033] A curvatura do caminho de furo de poço pode ser dada como:
[0034] onde x é a distância do comprimento de curso entre as estações de levantamento ou pontos 308 (FIG. 1), s é o comprimento do arco de x, e r(s) é o raio do comprimento de arco s. A curvatura k também é indicativa do vetor tangente |& do caminho de furo de poço.Alternativamente, a curvatura do caminho de furo de poço também pode ser dada como:
[0035] onde α é a inclinação do caminho de furo de poço como obtido a partir de pelo menos duas medições em tempo real obtidas na BHA em estações de levantamento correspondentes 308 (FIG. 3). Usando a curvatura do caminho de furo de poço, a torção do caminho de furo de poço também pode ser determinada do seguinte modo:
[0036] onde φ é o azimute do caminho de furo de poço comoobtido a partir de pelo menos duas medições em tempo real obtidas naBHA em estações de levantamento correspondentes 308 (FIG. 3). Ambosos cálculos para a curvatura e torção dependem da inclinação (α), azimute(Φ) e comprimento de curso (d) (ou seja, a distância entre as estações de levantamento 308).
[0037] Com a inclusão do parâmetro de torção (T) como a integral do comprimento de arco da torção ( T) ao quadrado, a equação de energia mínima (1) torna-se mais abrangente para o projeto do caminho de furo de poço configurado para devolver o caminho real do furo de poço 306 ao caminho do furo de poço projetado 300. Esta equação pode ser dada como:
[0038] Equação (5) pode ser adicionalmente normalizada para um comprimento de curso de furo de poço padrão entre as estações de levantamento ou pontos 308 (FIG. 3) e pode ser dada como:
[0039] Da mesma forma, as equações de energia mínima transformam mudanças diferenciais na curvatura, torção e energia de deformação do caminho de retorno (ou seja, o caminho real do furo de poço 306 voltando para o caminho do furo de poço projetado 300) em valores calculados. Tais valores calculados podem ser determinados usando um sistema de computador, tal como o módulo de controle 210 da FIG. 2.
[0040] Referindo-se agora à FIG. 4, com referência continuada às FIGS. 1 a 3, é ilustrado um diagrama esquemático simplificado de um sistema 400 que possa estar configurado para executar os métodos descritos neste documento, de acordo com uma ou mais modalidades.Como ilustrado, o sistema 400 pode incluir o módulo de controle 210, como geralmente descrito acima com referência à FIG. 2, acoplado de forma comunicável a um sistema de perfuração 402 e um sistema de medição 404. O sistema de medição 404 pode incluir, por exemplo, a ferramenta MWD/LWD 204 e o sub de sensor 208 da FIG. 2 a fim de coletar e transmitir informações direcionais, informações mecânicas, informações de formação e semelhantes. Informações direcionais atualizadas da BHA 104 (FIG. 2), tais como comprimento de curso, inclinação e azimute, podem ser obtidas e transmitidas em tempo real para o módulo de controle 202 sob a forma de um ou mais sinais de medição 406.
[0041] O módulo de controle 202 pode incluir uma unidade de processamento que pode ser configurada para receber e processar os sinais de medição 406. Em algumas modalidades, a unidade de processamento pode ser um módulo ou sistema de controle proporcional- integral-derivativo (PID). A unidade de processamento pode ser adicionalmente configurada para comparar os sinais de medição 406 com dados do caminho armazenados correspondentes ao caminho do furo de poço planejado 300 (FIG. 3). Se os sinais de medição 406, como processados no módulo de controle 202, indicam que o caminho real de furo de poço 306 (FIG. 3) tiver desviado do caminho de furo de poço planejado 300, o módulo de controle 202 pode ser configurado para empregar as equações de energia mínima descritas acima e calcular um caminho de retorno para o caminho real do furo de poço 306 que resulta em energia mínima de furo de poço incremental.
[0042] Usar os resultados derivados das equações de energia mínima, o módulo de controle 202 pode ser configurado para gerar e enviar um ou mais sinais de comando corretivos 408 para o sistema de perfuração 402 a fim de reorientar a trajetória do caminho real de furo de poço 306 de tal forma que ele se junte com o caminho do furo de poço planejado 300. O sistema de perfuração 402 pode incluir o conjunto direcional 202 (FIG. 2) e a broca de perfuração 114 (FIG. 2), por exemplo. Mediante o recebimento dos sinais de comando corretivos 408, o conjunto direcional 202 pode ajustar um ou mais parâmetros de perfuração a fim de redirecionar a broca de perfuração 114 em direção ao caminho do furo de poço planejado 300. Parâmetros de perfuração exemplares incluem, mas não estão limitados a, peso sobre a broca, fluxo de fluido de perfuração através da coluna de perfuração 106 (FIG. 2), a velocidade de rotação da coluna de perfuração 106, a densidade e viscosidade do fluido de perfuração, o azimute e a inclinação da BHA 104, direção da face de ferramenta, ângulo torto, suas combinações e semelhantes.
[0043] À medida que a perfuração progride e avança dentro da formação subterrânea 304 (FIG. 3), o sistema de medição 404 pode ser configurado para tomar continuamente ou caso contrário obter medições de levantamento 410 correspondentes às condições em tempo real da operação de perfuração. Em algumas modalidades, as medições de levantamento 410 podem ser tomadas nos pontos de levantamento 308 (FIG. 3), mas podem ser igualmente tiradas a qualquer momento durante a operação de perfuração, sem desviar do escopo da divulgação. Consequentemente, à medida que a operação de perfuração progride, o módulo de controle 202 é continuamente atualizado com dados de medição em tempo real 406 correspondentes às informações direcionais (ou seja, inclinação em tempo real e ângulos de azimute) da BHA 104 (FIG. 2) e pode então emitir sinais de comando corretivos 408 configurados para manter o caminho real de furo de poço 306 em linha com o caminho do furo de poço planejado 300. Além disso, uma vez que as equações de energia mínima são utilizadas na geração dos sinais de comando corretivos 408, um perfil de furo de poço mais liso resulta na redução do arraste e atrito geral.
[0044] Com base nos cálculos realizados no módulo de controle 210, a energia de caminho do furo de poço, bem como seu formato, pode ser estimada. Por exemplo, o sistema de medição 404 detecta automaticamente entre duas estações de levantamento (por exemplo, estações 308 da FIG. 3), permitindo desse modo que o módulo de controle 210 classifique o caminho do furo de poço de modo que a automação do fundo de poço possa ser ajustada automaticamente através do sistema de perfuração 402. Quando uma condição matemática particular é satisfeita, o módulo de controle 210 pode determinar ou caso contrário concluir qual é o formato do caminho do furo de poço e, desse modo, gerar um sinal de comando corretivo 408 projetado para corrigir a trajetória do furo de poço.
[0045] Por exemplo, quando nenhuma curvatura (K) é detectada ou de outro modo determinada entre dois pontos de levantamento, o caminho do poço pode estar no que é conhecido como um modo de "exploração". O módulo de controle 210 pode classificar o atual caminho de furo de poço como essencialmente reto e confirmar que a energia mínima está sendo gasta entre esses dois pontos de levantamento. Para caminhos de furo de poço em um plano bidimensional (2D), quando a torção (T) detectada na BHA 104 é substancialmente igual a zero, então a condição matemática indicando que o caminho do furo de poço é um caminho 2D é satisfeita se o caminho do furo de poço é uma curva plana. Em outras palavras, energia é contribuída apenas devido à curvatura (k) em tais caminhos do furo de poço e o caminho do furo de poço pode ser classificado como uma curva plana. De forma similar, quando a curvatura (k) do caminho do furo de poço é constante, mas maior ou menor que zero (por exemplo, crescente ou descendente) e torção (t) é substancialmente igual a zero, então a condição indicando que o caminho do furo de poço é um caminho 2D é satisfeita se o caminho do furo de poço é parte de um círculo. Em outras palavras, a energia é contribuída apenas devido à curvatura (k), mas, caso contrário, permanece constante.
[0046] Para os caminhos de furo de poço no espaço tridimensional (3D), a condição matemática indicando que o caminho de furo de poço é um caminho 3D é satisfeita quando a curvatura (k) é constante, mas maior do que zero, e a torção (t) é constante, mas maior do que zero, se o caminho do furo de poço é parte de uma hélice circular ou t/k é constante. Em tais casos, a energia é contribuída devido tanto à curvatura (K) quanto à torção (T), mas permanece constante. De forma similar, quando a torção T/K é maior ou menor que zero, então a condição matemática indicando que o caminho do furo de poço é um caminho 3D é satisfeita e o caminho do furo de poço pode ser classificado como um caminho radial espiral que aumenta progressivamente.
[0047] Para caminhos de furo de poço 3D, em algumas modalidades, o módulo de controle 210 pode ser adicionalmente configurado para calcular ou determinar o índice de rotação (I) para o caminho do furo de poço. O índice de rotação é uma grandeza geométrica que estima o número de loops em uma curva e looping positivo se o normal é orientado para dentro (ou seja, a curva progride no sentido anti-horário). Calcular o índice de rotação é outra maneira de definir a característica de uma curva de espaço entre as duas estações de levantamento e pode ser usado para ajudar a definir ou, caso contrário, descrever a trajetória do caminho de furo de poço. O índice de rotação pode ser determinado a partir da seguinte equação:
[0048] onde corresponde à curvatura total, que é amultiplicada 2π pelo índice de rotação da curva. Por exemplo, o índice de rotação de uma curva plana, tal como um círculo ou curvas obtidas pela deformação de um círculo, sempre será um. Mais geralmente, para uma curva de espaço usando a curvatura total, pode ser dado como:
corresponde à curvatura total, que é amultiplicada 2π pelo índice de rotação da curva. Por exemplo, o índice de rotação de uma curva plana, tal como um círculo ou curvas obtidas pela deformação de um círculo, sempre será um. Mais geralmente, para uma curva de espaço usando a curvatura total, pode ser dado como:
[0049] Usar a equação (5) acima, pode ser visto que:
[0050] Isto é, mais rotação ou espiral dentro do atual caminhode poço equivale a mais de energia do perfil de caminho de poço ou maisenergia necessária para perfurar para retornar para o caminho do furo depoço planejado 300. Cálculo do índice de rotação pelo módulo de controle210 pode ser útil na determinação de uma nova inclinação, azimute eenergia de tensão com base na rotação da coluna de ferramenta entre asduas estações de levantamento. Isto também irá prover uma estimativaacerca de como o caminho de poço se torna espiral com base no aumentode energia.
[0051] Da mesma forma, o módulo de controle 210 pode determinar ou caso contrário concluir o que o formato do caminho de furo de poço é entre as estações de levantamento com base em medições obtidas a partir do sistema de medição 404 e os cálculos internos. Sabendo que o formato de caminho do furo de poço pode ser útil em permitir que o módulo de controle 210 gere automaticamente os sinais de comando corretivos 408 projetados para corrigir a trajetória do furo de poço, automatizando desse modo ajustes posteriores para o sistema de perfuração 402 em tempo real.
[0052] Referindo-se agora à FIG. 5, com referência contínua à FIG. 4, é ilustrado um diagrama esquemático do módulo de controle 210, de acordo com uma ou mais modalidades. A presente divulgação pode ser implementada através de um programa executável por computador de instruções, tais como módulos do programa, geralmente referidos como aplicativos de software ou programas de aplicativo executados por um computador, tais como o módulo de controle 210. O software pode incluir, por exemplo, rotinas, programas, objetos, componentes e estruturas de dados que realizam tarefas particulares ou implementam tipos de dados abstratos particulares. O software forma uma interface para permitir que o módulo de controle 210 reaja de acordo com uma fonte de entrada.
[0053] Um programa aplicativo 502 pode ser usado como um aplicativo de interface para implementar os métodos divulgados neste documento. Em algumas modalidades, o programa aplicativo pode ser WELLPLAN™, um aplicativo de software disponível comercialmente comercializado pela Landmark Graphics Corporation. O software também pode cooperar com outros segmentos de código para iniciar uma variedade de tarefas em resposta aos dados recebidos em conjunto com a fonte de dados recebidos. O programa aplicativo 502 pode ser armazenado em uma memória 504. A memória 504 armazena principalmente o programa aplicativo 502, que também pode ser descrito como um módulo de programa contendo instruções executáveis por computador não transitórias, executadas pelo módulo de controle 210 para implementar os métodos divulgados neste documento. A memória 504, portanto, pode incluir, adicionalmente, um módulo de trajetória do furo de poço 506, que engloba dados correspondentes ao caminho do furo de poço planejado 300 (FIG. 3) e que pode ser capaz de operar em conjunto com o programa aplicativo 502 (ou seja, WELLPLAN™).
[0054] Embora o módulo de controle 210 seja mostrado como tendo uma memória generalizada 504, o módulo de controle 210 pode incluir uma variedade de meios legíveis por computador. A título de exemplo e não limitação, meios legíveis por computador podem compreender meios de armazenamento de computador e meios de comunicação. A memória 504 pode incluir meios de armazenamento de computador sob a forma de memória volátil e/ou não volátil, tal como uma memória somente de leitura (ROM) e memória de acesso aleatório (RAM). Um sistema de entrada/saída básico (BIOS), contendo as rotinas básicas que ajudam a transferir informações entre elementos dentro do módulo de controle 210, tal como durante a inicialização, é tipicamente armazenado em ROM. A RAM contém tipicamente dados e/ou módulos de programa que são imediatamente acessíveis a e/ou atualmente sendo operados por uma unidade de processamento 508.
[0055] Os componentes mostrados na memória 504 também podem ser incluídos em outros meios de armazenamento removíveis/não removíveis, voláteis/não voláteis do computador. Por exemplo, uma unidade de disco rígido pode ler ou gravar para mídia magnética e inamovível, não volátil, uma unidade de disco magnético pode ler ou gravar para um disco magnético removível não volátil, e uma unidade de disco óptico pode ler ou gravar para um disco óptico não volátil e removível tal como um CD-ROM ou outra mídia óptica. Outros meios de armazenamento de computador removíveis/não removíveis, voláteis/não voláteis que podem ser usados no ambiente operacional exemplar podem incluir, mas não estão limitados a, fitas magnéticas cassetes, cartões de memória flash, discos versáteis digitais, fita de vídeo digital, RAM de estado sólido, ROM de estado sólido e semelhantes. As unidades e seus meios de armazenamento de computador associados discutidos acima proveem armazenamento de instruções legíveis por computador, estruturas de dados, módulos do programa e outros dados para o módulo de controle 210.
[0056] Um operador de poço pode inserir comandos e informações para o módulo de controle 210 através de uma interface de cliente 510, que pode incluir um ou mais dispositivos de entrada, tais como um teclado e dispositivo apontador, comumente referido como um mouse, trackball ou touch pad. Dispositivos de entrada também podem incluir um microfone, joystick, antena parabólica, scanner ou semelhantes. Estes e outros dispositivos de entrada também podem ser conectados à unidade de processamento 508 através da interface de cliente 510 e através de um barramento de sistema (não mostrado), mas podem ser conectados por outras estruturas de interface e de barramento, tais como uma porta paralela ou um barramento serial universal (USB). Um monitor ou outro tipo de dispositivo de exibição podem ser conectados ao barramento de sistema através de uma interface, tal como uma interface de vídeo. Além do monitor, computadores também podem incluir outros dispositivos periféricos de saída, tais como alto-falantes e impressora, que podem ser conectados através de uma interface periférica de saída.
[0057] Embora muitos outros componentes internos do módulo de controle 210 não sejam mostrados, aqueles ordinariamente versados na técnica irão apreciar que tais componentes e sua interligação são bem conhecidos. Ademais, aqueles versados na técnica apreciarão que os métodos da divulgação podem ser praticados com uma variedade de configurações de sistema de computador, incluindo dispositivos manuais, sistemas multiprocessadores, componentes eletrônicos baseados em microprocessador ou programáveis pelo consumidor, minicomputadores, computadores mainframe e semelhantes. Qualquer número de sistemas de computador e redes de computador é aceitável para uso com a presente divulgação. A divulgação pode ser praticada em ambientes de cálculo distribuído, onde tarefas são desempenhadas por dispositivos de processamento remoto que estão ligados através de uma rede de comunicações. Em um ambiente de cálculo distribuído, módulos de programa podem estar localizados tanto em meios de armazenamento de computador locais quanto remotos, incluindo dispositivos de armazenamento de memória. A presente divulgação pode, portanto, ser implementada em conexão com diversos hardwares, softwares ou uma combinação dos mesmos em um sistema de computador ou outro sistema de processamento.
[0058] Referindo-se agora à FIG. 7, é ilustrado um fluxograma para um método 700 de automatização das operações de perfuração, de acordo com uma ou mais modalidades descritas neste documento. O método 700 pode incluir avançar uma coluna subsuperficial (BHA) dentro de uma formação subterrânea para formar um furo de poço, como em 702. O furo de poço pode ser formado ao longo de um caminho real de furo de poço, mas pode estar seguindo um caminho de furo de poço planejado. A BHA pode incluir um módulo de controle, um ou mais sensores e um conjunto direcional. Medições de levantamento podem ser tiradas com os um ou mais sensores em duas ou mais estações de levantamento ao longo do caminho real de furo de poço, como em 704.
[0059] O método 700 pode incluir adicionalmente comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado, como em 706. Tal comparação pode ser feita e de outro modo processada dentro do módulo de controle. Um caminho de retorno pode então ser determinado com base na energia mínima do caminho real do furo de poço, como em 708. Isso pode ser determinado quando o caminho real de furo de poço tiver desviado do caminho de furo de poço planejado e ações corretivas podem então ser necessárias. Consequentemente, um sinal de comando corretivo pode ser transportado para o conjunto direcional a fim de reorientar o caminho real do furo de poço, como em 710. Em outras palavras, o módulo de controle pode ser configurado para calcular e transmitir o sinal de comando corretivo para o conjunto direcional a fim de mudar a trajetória do caminho real do furo de poço, de tal forma que ele retorne para o caminho do furo de poço planejado.
[0060] Modalidades divulgadas neste documento incluem:
[0061] A. Um método inclui avançar uma coluna subsuperficial (BHA) dentro de uma formação subterrânea e formar, desse modo, um furo de poço ao longo de um caminho real de furo de poço, a BHA incluindo um módulo de controle, um ou mais sensores e um conjunto direcional, tomar medições de levantamento com os um ou mais sensores em duas ou mais estações de levantamento ao longo do caminho real de furo de poço, comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado com o módulo de controle, determinar com o módulo de controle um caminho de retorno com base em energia mínima do caminho real de furo de poço quando o caminho real de furo de poço tiver desviado do caminho de furo de poço planejado e transmitir um sinal de comando corretivo ao conjunto direcional com o módulo de controle a fim de reorientar uma trajetória do caminho real de furo de poço de tal forma que ele retorne para o caminho de furo de poço planejado.
[0062] B. Um sistema para a perfuração de um furo de poço. O sistema pode incluir um sistema de medição configurado para obter medições de levantamento em duas ou mais estações de levantamento ao longo de um caminho real de furo de poço, um módulo de controle acoplado de forma comunicável ao sistema de medição e configurado para comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado e, quando o caminho real de furo de poço tiver desviado do caminho de furo de poço planejado, determinar um caminho de retorno com base na energia mínima do caminho real de furo de poço, e um sistema de perfuração acoplado de forma comunicável ao módulo de controle, o sistema de perfuração sendo configurado para receber um ou mais sinais de comando corretivos do módulo de controle e reorientar uma trajetória do caminho real de furo de poço de tal forma que ele retorne para o caminho de furo de poço planejado.
[0063] C. Um meio legível por computador não transitório incluindo instruções legíveis por computador armazenadas nesta que, quando executadas por um processador, configuram o processador para desempenhar funções, incluindo tomar medições de levantamento com um ou mais sensores dispostos em uma coluna subsuperficial (BHA) em duas ou mais estações de levantamento ao longo de um furo de poço sendo perfurado pela BHA, a BHA sendo avançada em uma formação subterrânea e, desse modo, formando um caminho real de furo de poço, comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado com um módulo de controle disposto na BHA, determinar com o módulo de controle um caminho de retorno com base na energia mínima do caminho real de furo de poço quando o caminho real de furo de poço desvia do caminho de furo de poço planejado e transmitir um sinal de comando corretivo para um conjunto direcional da BHA com o módulo de controle a fim de reorientar uma trajetória do caminho real de furo de poço de tal forma que ele retorne para o caminho de furo de poço planejado.
[0064] Cada uma das modalidades A, B e C pode ter um ou mais dos seguintes elementos adicionais em qualquer combinação: Elemento 1, compreender, adicionalmente, a automatização da tirada das medições de levantamento, a determinação do caminho de retorno e a reorientação do caminho real de furo de poço, de tal forma que a BHA retorne para o caminho de furo de poço planejado autonomamente. Elemento 2: em que determinar, com o módulo de controle, o caminho de retorno compreende minimizar uma curvatura e uma torção do caminho real de furo de poço como retornando para o caminho de furo de poço planejado. Elemento 3: Método, de acordo com a reivindicação 1, compreendendo, adicionalmente, ajustar um ou mais parâmetros de perfuração com o conjunto direcional em resposta aos sinais de comando corretivos. Elemento 4: em que tomar as medições de levantamento com os um ou mais sensores inclui condições de medição em tempo real do caminho real de furo de poço e transmitir as medições de levantamento para o módulo de controle em tempo real. Elemento 5: compreende, adicionalmente, manter o caminho real de furo de poço ao longo do caminho de furo de poço planejado ao transmitir autonomamente os sinais de comando corretivos ao conjunto direcional em tempo real. Elemento 6: compreende, adicionalmente, determinar um formato do caminho real de furo de poço com o módulo de controle. Elemento 7: compreende, adicionalmente, gerar o sinal de comando corretivo com base pelo menos em parte no formato do caminho real de furo de poço. Elemento 8: compreende, adicionalmente, calcular um índice de rotação para o caminho real de furo de poço com o módulo de controle.
[0065] Elemento 9: em que o sistema de medição inclui pelo menos um de uma ferramenta de medição durante a perfuração e uma ferramenta de perfilagem durante a perfuração. Elemento 10: em que a ferramenta de medição durante a perfuração é configurada para medir e obter informações direcionais para uma coluna subsuperficial, as informações direcionais incluindo ângulos de inclinação e azimute da coluna subsuperficial. Elemento 11: em que o sistema de perfuração inclui uma ferramenta orientável rotativa e pelo menos uma broca de perfuração operativamente acoplada aos mesmos. Elemento 12: em que a ferramenta orientável rotativa recebe os um ou mais sinais de comando corretivos a partir do módulo de controle e ajusta um ou mais parâmetros de perfuração a fim de reorientar a trajetória de pelo menos um broca de perfuração de tal forma que o caminho real de furo de poço retorne para o caminho de furo de poço planejado. Elemento 13: em que os um ou mais parâmetros de perfuração são pelo menos um de peso sobre a broca, fluxo de fluido de perfuração através de uma coluna de perfuração, velocidade de rotação da coluna de perfuração, uma densidade e viscosidade do fluido de perfuração e azimute e inclinação de uma coluna subsuperficial. Elemento 14: em que o módulo de controle inclui uma unidade de processamento configurada para minimizar uma curvatura e uma torção do caminho real de furo de poço retornando para o furo de poço planejado.
[0066] Portanto, os sistemas e métodos divulgados neste documento são bem adaptados para obter as finalidades e as vantagens mencionadas, assim como aquelas que são inerentes aos mesmos. As modalidades particulares divulgadas acima são apenas ilustrativas, uma vez que os ensinamentos da presente divulgação podem ser modificados e praticados de maneiras diferentes, mas equivalentes aparentes àqueles versados na técnica tendo o benefício dos ensinamentos deste documento. Além disso, nenhuma limitação é pretendida aos detalhes de construção ou projeto mostrados neste documento, à exceção do descrito nas reivindicações abaixo. É, portanto, evidente que as modalidades ilustrativas particulares divulgadas acima podem ser alteradas, combinadas ou modificadas e todas as tais variações são consideradas dentro do escopo da presente divulgação. Os sistemas e métodos ilustrativamente divulgados neste documento adequadamente podem ser praticados na ausência de qualquer elemento que não for divulgado especificamente neste documento e/ou qualquer elemento opcional divulgado neste documento. Embora as composições e os métodos sejam descritos em termos de “compreendendo”, “contendo” ou “incluindo” vários componentes ou etapas, as composições e métodos também podem “consistir essencialmente em” ou “consistir em” vários componentes e etapas. Todos os números e faixas divulgados acima podem variar em alguma quantia. Sempre que uma faixa numérica com um limite inferior e um limite superior for divulgada, qualquer número e qualquer faixa inclusa que esteja dentro da faixa também é especificamente divulgado. Em particular, cada faixa de valores (da forma, “de cerca de a a cerca de b,” ou, equivalentemente, “de aproximadamente a a b,” ou, equivalentemente, “de aproximadamente a-b”) divulgada aqui deve ser compreendida para determinar cada número e faixa englobados dentro da faixa mais ampla de valores. Além disso, os termos nas reivindicações têm seu significado claro e comum, a menos que definido de outra maneira explicitamente e claramente pelo titular de patente. Além disso, os artigos indefinidos “um” ou “uma”, conforme usados nas reivindicações, são definidos neste documento para significar um ou mais de um do elemento que introduzem. Se houver qualquer conflito nos usos de uma palavra ou termo neste relatório descritivo e em uma ou mais patentes ou outros documentos que possam estar incorporados neste documento por referência, devem-se adotar as definições que forem consistentes com este relatório descritivo.
Claims (18)
1. Método (700) caracterizado por compreender:avançar uma coluna subsuperficial (BHA) (104) dentro de uma formação subterrânea (304) e, desse modo, formar um furo de poço (118) ao longo de um caminho real do furo de poço (306), a BHA incluindo um módulo de controle (210), um ou mais sensores e um conjunto direcional (202);tomar medições de levantamento com os um ou mais sensores em duas ou mais estações de levantamento (308) ao longo do caminho real do furo de poço (306);comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado (300) com o módulo de controle (210);determinar, com o módulo de controle (210), um caminho de retorno com base em energia mínima do caminho real de furo de poço (306) quando o caminho real de furo de poço (306) tiver desviado do caminho de furo de poço planejado (300);em que determinar o caminho de retorno compreende determinar uma taxa de mudança de inclinação entre cada estação de levantamento (308), uma taxa de mudança de azimute entre cada estação de levantamento (308) e um comprimento de curso entre cada estação de levantamento (308) e, desse modo, minimizando uma curvatura e uma torção do caminho real do poço (306), retornando ao caminho de furo de poço planejado (300); etransmitir um sinal de comando corretivo (408) para o conjunto direcional (202) com o módulo de controle (210) a fim de reorientar uma trajetória do caminho real de furo de poço (306) de tal forma que ele retorne para o caminho de furo de poço planejado (300).
2. Método (700), de acordo com a reivindicação 1, caracterizado por compreender, ainda, a automatização da tomada das medições de levantamento, a determinação do caminho de retorno e a reorientação do caminho real de furo de poço (306), de tal forma que a BHA retorne para o caminho de furo de poço planejado (300) autonomamente.
3. Método (700), de acordo com a reivindicação 1, caracterizado por compreender, ainda, ajustar um ou mais parâmetros de perfuração com o conjunto direcional (202) em resposta aos sinais de comando corretivos (408).
4. Método (700), de acordo com a reivindicação 1, caracterizado pelo fato de que as medições de levantamento com os um ou mais sensores compreendem:medição de condições em tempo real do caminho real de furo de poço (306); etransmitir as medições de levantamento para o módulo de controle (210) em tempo real.
5. Método (700), de acordo com a reivindicação 4, caracterizado por compreender, ainda, manter o caminho real de furo de poço (306) ao longo do caminho de furo de poço planejado (300) ao transmitir autonomamente os sinais de comando corretivos (408) ao conjunto direcional (202) em tempo real.
6. Método (700), de acordo com a reivindicação 1, caracterizado por compreender, ainda, determinar um formato do caminho real de furo de poço (306) com o módulo de controle (210).
7. Método (700), de acordo com a reivindicação 6, caracterizado por compreender, ainda, gerar o sinal de comando corretivo (408) com base pelo menos em parte no formato do caminho real de furo de poço (306).
8. Método (700), de acordo com a reivindicação 1, caracterizado por compreender, ainda, calcular um índice de rotação para o caminho real de furo de poço (306) com o módulo de controle (210).
9. Sistema para a perfuração de um furo de poço (118) caracterizado por compreender: um sistema de medição (404) configurado para obter medições de levantamento em duas ou mais estações de levantamento (308) ao longo de um caminho real de furo de poço (306);um módulo de controle (210) acoplado de forma comunicável ao sistema de medição (404) e configurado para comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado (300) e, quando o caminho real de furo de poço (306) tiver desviado do caminho de furo de poço planejado (300), determinar um caminho de retorno com base na energia mínima do caminho real de furo de poço (306);em que determinar o caminho de retorno compreende determinar uma taxa de mudança de inclinação entre cada estação de levantamento (308), uma taxa de mudança de azimute entre cada estação de levantamento (308) e um comprimento de curso entre cada estação de levantamento (308) e, desse modo, minimizando uma curvatura e uma torção do caminho real de furo de poço (306), retornando ao caminho de furo de poço planejado (300); eum sistema de perfuração (100, 402) acoplado de forma comunicável ao módulo de controle (210), o sistema de perfuração sendo configurado para receber um ou mais sinais de comando corretivos (408) do módulo de controle (210) e reorientar uma trajetória do caminho real de furo de poço (306) de tal forma que ele retorne para o caminho de furo de poço planejado (300).
10. Sistema, de acordo com a reivindicação 9, caracterizado pelo fato do sistema de medição (404) incluir pelo menos um dentre uma ferramenta de medição durante a perfuração e uma ferramenta de perfilagem durante a perfuração.
11. Sistema, de acordo com a reivindicação 10, caracterizado pelo fato da ferramenta de medição durante a perfuração ser configurada para medir e obter informações direcionais para uma coluna subsuperficial (104), as informações direcionais incluindo ângulos de inclinação e azimute da coluna subsuperficial (104).
12. Sistema, de acordo com a reivindicação 9, caracterizado pelo fato do sistema de perfuração (100, 402) incluir uma ferramenta orientável rotativa e pelo menos uma broca de perfuração (114) operativamente acoplada aos mesmos.
13. Sistema, de acordo com a reivindicação 12, caracterizado pelo fato da ferramenta orientável rotativa receber os um ou mais sinais de comando corretivos (408) a partir do módulo de controle (210) e ajustar um ou mais parâmetros de perfuração a fim de reorientar a trajetória de uma broca de perfuração (114) de tal forma que o caminho real de furo de poço (306) retorne para o caminho de furo de poço planejado (300).
14. Sistema, de acordo com a reivindicação 13, caracterizado pelo fato de os um ou mais parâmetros de perfuração serem pelo menos um dentre peso sobre a broca, fluxo de fluido de perfuração através de uma coluna de perfuração (106), velocidade de rotação da coluna de perfuração (106), uma densidade e viscosidade do fluido de perfuração e azimute e inclinação de uma coluna subsuperficial (104).
15. Meio legível por computador não transitório caracterizado por incluir instruções legíveis por computador armazenadas neste que, quando executadas por um processador, configuram o processador para realizar funções, incluindo:tomar medições de levantamento com um ou mais sensores dispostos em uma coluna subsuperficial (BHA) (104) em duas ou mais estações de levantamento (308) ao longo de um furo de poço (118) sendo perfurado pela BHA, a BHA sendo avançada em uma formação subterrânea (304) e formando desse modo um caminho real de furo de poço (306);comparar as medições de levantamento com dados correspondentes a um caminho de furo de poço planejado (300) com um módulo de controle (210) disposto na BHA; determinar, com o módulo de controle (210), um caminho de retorno com base em energia mínima do caminho real de furo de poço (306) quando o caminho real de furo de poço (306) desvia-se do caminho de furo de poço planejado (300),em que determinar o caminho de retorno compreende determinar uma taxa de mudança de inclinação entre cada estação de levantamento (308), uma taxa de mudança de azimute entre cada estação de levantamento (308) e um comprimento de curso entre cada estação de levantamento (308) e, desse modo, minimizando uma curvatura e uma torção do caminho real de furo de poço (306), retornando ao caminho de furo de poço planejado (300); etransmitir um sinal de comando corretivo (408) para um conjunto direcional (202) da BHA com o módulo de controle (210) a fim de reorientar uma trajetória do caminho real de furo de poço (306) de tal forma que ele retorne para o caminho de furo de poço planejado (300).
16. Meio legível por computador não transitório, de acordo com a reivindicação 15, caracterizado por compreender, ainda, ajustar um ou mais parâmetros de perfuração com o conjunto direcional (202) em resposta aos sinais de comando corretivos (408).
17. Meio legível por computador não transitório, de acordo com a reivindicação 15, caracterizado por compreender, ainda:determinar um formato do caminho real de furo de poço (306) com o módulo de controle (210); egerar o sinal de comando corretivo (408) com base pelo menos em parte no formato do caminho real de furo de poço (306).
18. Meio legível por computador não transitório, de acordo com a reivindicação 15, caracterizado por compreender, ainda, calcular um índice de rotação para o caminho real de furo de poço (306) com o módulo de controle (210).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/US2013/057498 WO2015030790A1 (en) | 2013-08-30 | 2013-08-30 | Automating downhole drilling using wellbore profile energy and shape |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112016001161A2 BR112016001161A2 (pt) | 2017-07-25 |
| BR112016001161B1 true BR112016001161B1 (pt) | 2022-01-04 |
Family
ID=52587137
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016001161-9A BR112016001161B1 (pt) | 2013-08-30 | 2013-08-30 | Método e sistema para a perfuração de um furo de poço e meio legível por computador não transitório |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US9689249B2 (pt) |
| CN (1) | CN105658908A (pt) |
| AR (1) | AR096689A1 (pt) |
| AU (1) | AU2013399128B2 (pt) |
| BR (1) | BR112016001161B1 (pt) |
| CA (1) | CA2918881C (pt) |
| DE (1) | DE112013007371T5 (pt) |
| GB (1) | GB2531465B (pt) |
| MX (1) | MX357810B (pt) |
| NO (1) | NO20160090A1 (pt) |
| RU (1) | RU2642898C2 (pt) |
| WO (1) | WO2015030790A1 (pt) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9404355B2 (en) * | 2011-07-22 | 2016-08-02 | Schlumberger Technology Corporation | Path tracking for directional drilling as applied to attitude hold and trajectory following |
| US9938816B2 (en) * | 2012-10-03 | 2018-04-10 | Shell Oil Company | Optimizing performance of a drilling assembly |
| GB2531465B (en) | 2013-08-30 | 2020-04-08 | Halliburton Energy Services Inc | Automating downhole drilling using wellbore profile energy and shape |
| US9506335B1 (en) * | 2014-05-27 | 2016-11-29 | Gary Smith | Multi-directionally rotating downhole drilling assembly and method |
| AU2015298631B2 (en) * | 2014-08-04 | 2018-06-21 | Landmark Graphics Corporation | Modeling casing/riser wear and friction factor using discrete inversion techniques |
| US10612307B2 (en) * | 2014-08-28 | 2020-04-07 | Schlumberger Technology Corporation | Method and system for directional drilling |
| US10240313B2 (en) * | 2015-08-25 | 2019-03-26 | Ensco Services Limited | Going on location feasibility |
| US20180334897A1 (en) * | 2015-12-31 | 2018-11-22 | Landmark Graphics Corporation | Drilling control based on brittleness index correlation |
| WO2017173299A1 (en) * | 2016-03-31 | 2017-10-05 | Scientific Drilling International, Inc. | Method for improving survey measurement density along a borehole |
| CN106321064B (zh) * | 2016-08-22 | 2019-05-07 | 中国石油天然气股份有限公司 | 钻井参数的控制方法及装置 |
| CN106444360B (zh) * | 2016-11-09 | 2019-04-02 | 浙江大学宁波理工学院 | 开关暗盒打螺丝偏差控制方法 |
| WO2018143958A1 (en) * | 2017-01-31 | 2018-08-09 | Halliburton Energy Services, Inc. | Curvature-based feedback control techniques for directional drilling |
| US11143010B2 (en) | 2017-06-13 | 2021-10-12 | Schlumberger Technology Corporation | Well construction communication and control |
| US11021944B2 (en) | 2017-06-13 | 2021-06-01 | Schlumberger Technology Corporation | Well construction communication and control |
| GB2565584A (en) | 2017-08-17 | 2019-02-20 | Fibercore Ltd | Drilling system |
| CN108979625B (zh) * | 2018-07-24 | 2021-05-14 | 中国石油大学(北京) | 一种径向井轨迹测量装置及系统 |
| CA3051759C (en) * | 2018-09-21 | 2021-04-13 | Halliburton Energy Services, Inc. | Tool-specific steering optimization to hit a target |
| AU2020426033A1 (en) * | 2020-01-31 | 2022-06-23 | Halliburton Energy Services, Inc. | Trajectory control for directional drilling |
| DE102020105793A1 (de) * | 2020-03-04 | 2021-09-09 | Volocopter Gmbh | Bahnplanungsverfahren und Bahnplanungsalgorithmus für ein Fluggerät |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4445578A (en) * | 1979-02-28 | 1984-05-01 | Standard Oil Company (Indiana) | System for measuring downhole drilling forces |
| US4690212A (en) * | 1982-02-25 | 1987-09-01 | Termohlen David E | Drilling pipe for downhole drill motor |
| GB8608857D0 (en) * | 1986-04-11 | 1986-05-14 | Drilex Aberdeen Ltd | Drilling |
| EP0324778A4 (en) * | 1986-09-24 | 1990-03-21 | Pezzimenti & Sons Pty Ltd G | DRILLING DEVICE. |
| US20020177955A1 (en) * | 2000-09-28 | 2002-11-28 | Younes Jalali | Completions architecture |
| US6523623B1 (en) * | 2001-05-30 | 2003-02-25 | Validus International Company, Llc | Method and apparatus for determining drilling paths to directional targets |
| US6755262B2 (en) * | 2002-01-11 | 2004-06-29 | Gas Technology Institute | Downhole lens assembly for use with high power lasers for earth boring |
| US6851488B2 (en) * | 2003-04-04 | 2005-02-08 | Gas Technology Institute | Laser liner creation apparatus and method |
| US7730967B2 (en) * | 2004-06-22 | 2010-06-08 | Baker Hughes Incorporated | Drilling wellbores with optimal physical drill string conditions |
| US7786733B2 (en) * | 2004-07-14 | 2010-08-31 | Schlumberger Technology Corporation | Apparatus and system for well placement and reservoir characterization |
| DE112006002137T5 (de) * | 2005-08-08 | 2008-06-26 | Halliburton Energy Services, Inc., Houston | Verfahren und Systeme zum Konstruieren und/oder Auswählen von Bohrausrüstung mit einer gewünschten Bohrmeißellenkbarkeit |
| US8672055B2 (en) * | 2006-12-07 | 2014-03-18 | Canrig Drilling Technology Ltd. | Automated directional drilling apparatus and methods |
| RU2424430C2 (ru) | 2006-12-07 | 2011-07-20 | Канриг Дриллинг Текнолоджи Лтд | Автоматизированная бурильная установка на основе mse |
| US7606666B2 (en) * | 2007-01-29 | 2009-10-20 | Schlumberger Technology Corporation | System and method for performing oilfield drilling operations using visualization techniques |
| EP2232012B1 (en) | 2007-12-17 | 2011-10-19 | Landmark Graphics Corporation, A Halliburton Company | System and method for modeling wellbore trajectories |
| US8286729B2 (en) * | 2008-02-15 | 2012-10-16 | Baker Hughes Incorporated | Real time misalignment correction of inclination and azimuth measurements |
| RU2370620C1 (ru) | 2008-06-05 | 2009-10-20 | Гарри Сергеевич Оганов | Способ проводки наклонно-направленной скважины |
| US8862436B2 (en) * | 2008-06-24 | 2014-10-14 | Landmark Graphics Corporation | Systems and methods for modeling wellbore trajectories |
| GB2531465B (en) | 2013-08-30 | 2020-04-08 | Halliburton Energy Services Inc | Automating downhole drilling using wellbore profile energy and shape |
-
2013
- 2013-08-30 GB GB1601168.6A patent/GB2531465B/en active Active
- 2013-08-30 AU AU2013399128A patent/AU2013399128B2/en active Active
- 2013-08-30 CN CN201380078398.4A patent/CN105658908A/zh active Pending
- 2013-08-30 BR BR112016001161-9A patent/BR112016001161B1/pt active IP Right Grant
- 2013-08-30 MX MX2016000973A patent/MX357810B/es active IP Right Grant
- 2013-08-30 RU RU2016101729A patent/RU2642898C2/ru not_active IP Right Cessation
- 2013-08-30 CA CA2918881A patent/CA2918881C/en active Active
- 2013-08-30 DE DE112013007371.4T patent/DE112013007371T5/de not_active Withdrawn
- 2013-08-30 WO PCT/US2013/057498 patent/WO2015030790A1/en active Application Filing
- 2013-08-30 US US14/374,538 patent/US9689249B2/en active Active
-
2014
- 2014-06-23 AR ARP140102354A patent/AR096689A1/es active IP Right Grant
-
2016
- 2016-01-18 NO NO20160090A patent/NO20160090A1/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| BR112016001161A2 (pt) | 2017-07-25 |
| CA2918881C (en) | 2018-03-06 |
| RU2016101729A (ru) | 2017-07-26 |
| RU2642898C2 (ru) | 2018-01-29 |
| AU2013399128B2 (en) | 2016-11-17 |
| GB201601168D0 (en) | 2016-03-09 |
| CN105658908A (zh) | 2016-06-08 |
| US9689249B2 (en) | 2017-06-27 |
| MX2016000973A (es) | 2016-07-05 |
| CA2918881A1 (en) | 2015-03-05 |
| AR096689A1 (es) | 2016-01-27 |
| US20150247397A1 (en) | 2015-09-03 |
| NO20160090A1 (en) | 2016-01-18 |
| GB2531465B (en) | 2020-04-08 |
| AU2013399128A1 (en) | 2016-02-11 |
| MX357810B (es) | 2018-07-25 |
| GB2531465A (en) | 2016-04-20 |
| WO2015030790A1 (en) | 2015-03-05 |
| DE112013007371T5 (de) | 2016-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016001161B1 (pt) | Método e sistema para a perfuração de um furo de poço e meio legível por computador não transitório | |
| AU2013408249B2 (en) | Closed-loop drilling parameter control | |
| AU2013399065B2 (en) | Optimized rotation of a drill string during a sliding mode of directional drilling | |
| RU2643057C2 (ru) | Управление разработкой ствола скважины с использованием расчётов неопределённости | |
| AU2013399137B2 (en) | Estimating and predicting wellbore tortuosity | |
| US8301382B2 (en) | Continuous geomechanically stable wellbore trajectories | |
| CA2938521C (en) | Controlling a bottom-hole assembly in a wellbore | |
| CA2956570C (en) | Adjusting survey points post-casing for improved wear estimation | |
| US11149505B2 (en) | Drilling fluid flow measurement in an open channel fluid conduit | |
| US20190323333A1 (en) | Automated steering using operating constraints | |
| US20230272704A1 (en) | Automated Vertical-Curve-Lateral Drilling | |
| US20230096963A1 (en) | Increasing Drilling Accuracy While Increasing Drilling Rates | |
| BR112021012293A2 (pt) | Método para um caminho de poço atualizado, sistema para atualizar um caminho de poço e meio de armazenamento legível por computador não transitório |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B06A | Patent application procedure suspended [chapter 6.1 patent gazette] | ||
| B350 | Update of information on the portal [chapter 15.35 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 30/08/2013, OBSERVADAS AS CONDICOES LEGAIS. |