JP6307270B2 - Route search device - Google Patents
Route search device Download PDFInfo
- Publication number
- JP6307270B2 JP6307270B2 JP2013269905A JP2013269905A JP6307270B2 JP 6307270 B2 JP6307270 B2 JP 6307270B2 JP 2013269905 A JP2013269905 A JP 2013269905A JP 2013269905 A JP2013269905 A JP 2013269905A JP 6307270 B2 JP6307270 B2 JP 6307270B2
- Authority
- JP
- Japan
- Prior art keywords
- route
- link
- node
- cost
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Description
本発明は、経路探索装置に関するものである。 The present invention relates to a route search apparatus.
近年では、現在位置(出発地点)から目的地点までの経路を探索する経路探索装置として、自動車に搭載されたカーナビゲーションシステム、スマートフォンを含む携帯電話機、携帯ゲーム機、PND(Personal Navigation Device)、PDA(Personal
Digital Assistant)等が知られている。経路探索装置の中には、現在位置から目的地点までの経路として、利用者に複数の経路を提示するものもある。
In recent years, as a route search device for searching a route from a current position (departure point) to a destination point, a car navigation system mounted on a car, a mobile phone including a smartphone, a portable game machine, a PND (Personal Navigation Device), a PDA (Personal
Digital Assistant) is known. Some route search apparatuses present a plurality of routes to the user as routes from the current position to the destination point.
例えば、特許文献1には、現在位置から目的地点まで最短時間で到着する最適経路を探索するのに加え、到着するまでに利用者が許容できる時間や距離に基づいて許容量を設定し、最適経路のリンクコストの累計値に許容量を加算したリンクコストの累計値の範囲で最適経路とは異なる景観の良い経路を探索する技術が開示されている。また、特許文献2には、自動車が探索された経路を走行しているときに、予め設定された経路途中の交差点等の分岐点に近づくと、分岐点から目的地点までのサブルートを新たに探索して利用者に提示する技術が開示されている。また、特許文献3には、現在位置や目的地点といった特徴地点周辺を探索エリアとして、利用者が利用したいガソリンスタンド等の施設を探索する技術が開示されている。
For example, in
しかし、上記従来の技術では、特定の条件の下、最適経路に加えてサブルートが新たに探索されて利用者に提示されるが、特定の条件で探索されたサブルートは、最適経路と大きく異なるリンクを通過する場合があり、最適経路と並列で利用者に提示されるのが適当ではない場合があった。また、歩行者や自転車のように、経路を通過しているときにUターンや道を横切るといった進行方向を変更する自由度が高い利用者の場合には、最適経路と並列で特定の条件で探索されたサブルートが提示されることがさらに適当ではない場合があり、最適経路と類似する複数の経路を提示して利用者の利便性を高めたいという課題があった。 However, in the above conventional technique, a sub route is newly searched for in addition to the optimal route under a specific condition and presented to the user. However, the sub route searched under the specific condition is significantly different from the optimal route. In some cases, it is not appropriate to be presented to the user in parallel with the optimal route. Also, for users with a high degree of freedom to change the direction of travel, such as pedestrians and bicycles, such as U-turns or crossing the road when they are passing the route, in parallel with the optimal route In some cases, it is not appropriate to present the searched sub-route, and there is a problem in that it is desired to present a plurality of routes similar to the optimum route to improve the convenience for the user.
また、移動中の経路において、特定の分岐点に近づいてから他の経路を再度探索すると、経路探索装置の処理負担が重くなってしまうという課題があった。また、分岐点ごとに経路を再探索して、新たに提示されたサブルートを利用者が選択してしまうと、サブルートを選択することの積み重ねによって、最適経路との乖離が大きくなってしまうという課題があった。その上、経路探索において用いられることのあるダイクストラ法のアルゴリズムでは経路探索の起点とネットワークとしてつながりのある道路の全てについて探索を行なうこととなるため、経路探索処理の負荷が重くなるという難点がある。 In addition, if another route is searched again after approaching a specific branch point on the moving route, there is a problem that the processing load of the route search device becomes heavy. In addition, if the route is re-searched for each branch point and the user selects a newly presented sub route, the difference between the optimum route and the selection of the sub route will increase. was there. In addition, the Dijkstra algorithm, which is sometimes used in route search, searches for all the roads that are connected to the starting point of the route search and the network, which causes a problem that the load of the route search processing becomes heavy. .
このため、特許文献1に記載の技術のように最適経路をダイクストラ法で求めた後でリンクコストを変動させる処理を行なう場合はもちろん、特許文献3に記載の技術のように経路上の特徴点を基準に探索のエリアを設定する場合においても、経路探索のアルゴリズムとしてダイクストラ法を用いる以上は、経路探索装置の処理負担が重くなってしまうという課題があった。
本発明は、上記の課題を解決することのできる経路探索装置を提供することを目的とする。
For this reason, not only when the process of changing the link cost is performed after obtaining the optimum path by the Dijkstra method as in the technique described in
An object of this invention is to provide the route search apparatus which can solve said subject.
本発明は、上記課題の少なくとも1つを解決するためになされたものであり、以下の形態として実現可能である。 SUMMARY An advantage of some aspects of the invention is to solve at least one of the problems described above, and the invention can be implemented as the following forms.
本発明の一形態によれば、出発地点から目的地点までの経路を探索する経路探索装置が提供される。この経路探索装置は、道路をノード及び通行の難易度を示すコストに関するコスト情報が付与されているリンクで表現した道路ネットワークデータが記憶された道路ネットワークデータ記憶部と、前記出発地点から前記目的地点までの経路であって、該経路を構成する複数の前記リンクのコストを累計して求めた累計コストが最小となる最適経路を求める第一段階経路探索部と、許容コストを設定する許容コスト設定部と、前記最適経路を構成するリンクの少なくとも一部が包含される所定領域を選択する領域選択部と、前記最適経路となる道路に対応したノード及びリンク並びに前記所定領域の内部に存在する道路に対応する前記ノード及びリンクを用いて、前記最適経路のほかに、前記出発地点から目的地点までの経路であって該経路を構成する複数のリンクの累計コストと前記最適経路の累計コストとの乖離が前記許容コスト以下となる経路を求める第二段階経路探索部とを備える。 According to an aspect of the present invention, a route search device that searches for a route from a departure point to a destination point is provided. The route search device includes a road network data storage unit that stores road network data that expresses roads by nodes and links to which cost information about costs indicating the degree of difficulty of travel is assigned, and the destination point to the destination point. A first-stage route search unit that finds an optimum route that minimizes the accumulated cost obtained by accumulating the costs of the plurality of links that constitute the route, and an allowable cost setting that sets an allowable cost A region selection unit that selects a predetermined region that includes at least a part of the link that constitutes the optimal route, a node and a link that correspond to the road that is the optimal route, and a road that exists within the predetermined region In addition to the optimal route, a route from the departure point to the destination point is used in addition to the optimum route. And a second stage route searching unit for obtaining a path deviation between total cost of the plurality of links of accumulated cost and the optimal route to formation becomes less than the allowable costs.
上記形態の経路探索装置において、前記リンクには、道路の種別を表わす道路種別属性情報が付与されており、前記領域選択部は、前記最適経路を構成する少なくとも1つのリンクと、該リンクにノードを介して直接的又は間接的に接続されており前記道路種別属性情報が特定の種別である複数のリンクとを外周辺とする領域を前記所定領域として選択するものとしてもよい。 In the route search device of the above aspect, road type attribute information indicating a road type is given to the link, and the area selection unit includes at least one link constituting the optimum route and a node in the link. It is good also as what selects the area | region which makes the outer periphery the some link which is connected directly or indirectly via the said road classification attribute information and is a specific classification as said predetermined area | region.
上記形態の経路探索装置において、前記リンクには、該リンクに対応する道路が歩道である場合において、該リンクが歩道であることを示す情報としての歩道属性情報が付与されており、前記領域選択部は、前記最適経路を構成する少なくとも1つのリンクと、該リンクにノードを介して直接的又は間接的に接続されており前記歩道属性情報が付与されている複数のリンクとを外周辺とする領域を前記所定領域として選択するものとしてもよい。 In the route search device of the above aspect, when the road corresponding to the link is a sidewalk, the link is provided with sidewalk attribute information as information indicating that the link is a sidewalk, and the region selection The section includes at least one link configuring the optimum route and a plurality of links that are directly or indirectly connected to the link via a node and to which the sidewalk attribute information is assigned. An area may be selected as the predetermined area.
上記形態の経路探索装置において、前記領域選択部は、前記所定領域を、該所定領域の外周辺を構成するリンクの合計コストが所定値以下となるように選択するものとしてもよい。
上記形態の経路探索装置において、さらに、前記所定値は、前記許容コストの値としてもよい。
In the route search device according to the aspect described above, the area selection unit may select the predetermined area so that a total cost of links constituting an outer periphery of the predetermined area is a predetermined value or less.
In the route search device of the above aspect, the predetermined value may be a value of the allowable cost.
なお、上述した特徴は、本発明の特徴のすべてを列挙したものではなく、これらを要部とする構成(または方法)もまた発明となり得る。 Note that the above-described features do not enumerate all the features of the present invention, and a configuration (or method) including these as main parts can also be an invention.
本発明によれば、利用者にとっての利便性を高めるための、最適経路とは異なる経路の探索を、従来技術に比べ少ない負荷で行なうことができる。これにより、目的地点に到着するまでの時間にゆとりのある状況で経路探索要求を行なうユーザに対し複数の経路候補を提示することが容易になる。 ADVANTAGE OF THE INVENTION According to this invention, the search of the path | route different from the optimal path | route for improving the convenience for a user can be performed with less load compared with a prior art. This makes it easy to present a plurality of route candidates to a user who makes a route search request in a time-consuming situation until arrival at the destination point.
以下、本発明を具体化した実施例について説明する。
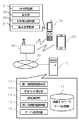
図1に示すように、本実施例における経路案内システムは、経路探索装置としてのサーバ10と、複数の携帯端末20とで構成される。サーバ10と携帯端末20とは、インターネット回線30及び基地局40を介して通信可能に接続されている。
Hereinafter, examples embodying the present invention will be described.
As shown in FIG. 1, the route guidance system in the present embodiment includes a
サーバ10は、道路ネットワークデータ記憶部としてのハードディスク11、第一段階経路探索部12、許容コスト設定部13、領域選択部14、第二段階経路探索部15、サーバ送受信部16を備える。第一段階経路探索部12、許容コスト設定部13、領域選択部14、第二段階経路探索部15は、サーバ10に備えられた図示しないCPUがメモリに展開されたソフトウェアを実行することにより実現される。
The
ハードディスク11には、道路ネットワークデータが記憶されている。道路ネットワークは、主に交差点を表現したノードと、道路や歩道を表現したリンクとを含んで構成されている。リンクには、当該リンクに対応する道路を通行する際の難易度を示すコストに関するコスト情報が付与されている。また、リンクには、道路の種別を表わす道路種別属性情報も付与されている。道路種別属性情報を参照することによって、当該リンクに対応する道路が国道であるか、県道であるか、市道であるか等を識別することができる。さらに、ハードディスク11には、携帯端末20で経路案内時に表示される地図に関する地図情報も記憶されている。
The
第一段階経路探索部12は、出発地点から目的地点まで最適に通行することのできる最適経路を求める機能を有する。ここで、最適経路とは、最短の時間で到達できる経路や最短の距離で到達できる経路、渋滞を極力回避した経路、降雨時にできるだけ濡れることなく通行できる経路など、ユーザの要望に応じた各種経路である。この最適経路は、周知のダイクストラ法で求められる。具体的には、リンクに付与されているコストを累計した場合において、その累計コストが最小となる経路が最適経路として採用される。
The first stage
許容コスト設定部13は、許容コストを設定する機能を有する。許容コストとは、最適経路の累計コストと最適経路に共通する部分を有する類似経路の累計コストとの乖離許容幅を定める値である。すなわち、許容コストは、最適経路に含まれる各ノードにリンクを通じて接続する直近のノードが最適経路に含まれない場合において当該直近のノードを経由する最適経路以外の経路を最適経路に類似する類似経路として設定することの可否を定める値である。なお、類似経路には、最適経路に類似した経路のほか、最適経路とは出発地点及び目的地点が同じであって当該最適経路の累計コストよりも許容コスト分だけ高いコスト以内で通行できる経路も含まれる。
The allowable
領域選択部14は、第一段階経路探索部12で求められた最適経路を構成するリンクの少なくとも一部が包含される領域を所定領域として選択する機能を有する。所定領域を選択する処理については後ほど詳述する。
The
第二段階経路探索部15は、最適経路とは異なる複数の類似経路を探索する機能を有する。ここで、類似経路は、最適経路における累計コストと許容コストとを合計したコスト内で上述した所定領域内に存在する道路を通行する経路である。この類似経路は、最適経路となる道路に対応したノード及びリンク並びに所定領域の内部に存在する道路に対応するノード及びリンクを用いて探索される。このとき、所定領域の外に存在する道路に対応するノード及びリンクは探索の対象に含まれない。したがって、類似経路を探索する際に探索枝が四方八方に延びることによる経路探索処理の負荷を軽減することができる。
The second stage
サーバ送受信部16は、携帯端末20から送信される各種データを受信するとともに、携帯端末20に各種データを送信する機能を有する。
携帯端末20は、GPS受信部21、表示部22、目的地点設定部23、端末送受信部24を備える。
The server transmission /
The
GPS受信部21は、GPS(Global Positioning System/全地球測位システム)を構成する人工衛星を用いて測定した携帯端末20の現在位置(緯度、経度)を特定する位置情報を電波によって受信する。
表示部22は、経路案内時における現在位置付近の地図等を表示する。表示部22は、液晶ディスプレイとこれを駆動する駆動回路とを備えている。なお、表示部22としては、液晶ディスプレイに限らず、有機ELディスプレイなど、種々の表示デバイスを採用することが可能である。
目的地点設定部23は、テンキーやカーソルキーやタッチパネルなどから構成される入力デバイスであって、利用者による目的地点の設定入力を受け付ける。
The
The
The destination
端末送受信部24は、位置情報及び目的地点設定部23により設定された目的地点情報等をサーバ10に送信するとともに、サーバ送受信部16から送信された各種データを受信する機能を有する。具体的には、出発地点としての現在位置及び目的地点に関する位置情報等をサーバ10に送信する。また、端末送受信部24は、サーバ10から経路案内に用いられる地図情報や経路データ等を受信する。
The terminal transmission /
次に、本実施例における経路案内システムを用いて経路を探索する方法について説明する。
図2に示すように、まず、携帯端末20は、GPS受信部21により、当該携帯端末20の現在位置(緯度、経度)に関する情報を、出発地点を特定する情報として取得する(ステップS11)。
Next, a method for searching for a route using the route guidance system in the present embodiment will be described.
As illustrated in FIG. 2, first, the
続いて、携帯端末20は目的地点設定部23により利用者による目的地点の入力を受け付ける。携帯端末20は、出発地点と目的地点とが特定された後、端末送受信部24により、出発地点及び目的地点の情報とともに、経路探索要求を、インターネット回線30を介してサーバ10に送信する(ステップS12)。
Subsequently, the
サーバ10のサーバ送受信部16は、携帯端末20から送信された出発地点及び目的地点の情報及び経路探索要求を受信する(ステップS20)。
The server transmission /
次に、第一段階経路探索部12は、出発地点から目的地点までの最適経路を求める(ステップS30)。続いて、領域選択部14は、求められた最適経路を構成するリンクデータ及びノードデータを用いて、所定領域の選択を行なう(ステップS40)。そして、第二段階経路探索部15は、最適経路を構成するリンクデータ及びノードデータ並びに所定領域の範囲内に存在する道路を表わすリンクデータ及びノードデータを用いて、最適経路とは異なる複数の類似経路を求める(ステップS50)。
Next, the first stage
なお、第一段階経路探索処理(ステップS30)、所定領域選択処理(ステップS40)、第二段階経路探索処理(ステップS50)の詳細については後述する。
サーバ送受信部16は、経路データ(最適経路及び複数の類似経路)とハードディスク11から読み出された経路探索結果に関連する地図情報とをあわせて、インターネット回線30を介して携帯端末20に送信する(ステップS60)。
Details of the first stage route search process (step S30), the predetermined area selection process (step S40), and the second stage route search process (step S50) will be described later.
The server transmission /
携帯端末20は、端末送受信部24により、経路データと経路に関連する地図情報とを受信する(ステップS13)。
最後に、携帯端末20は、表示部22により、サーバ10から得た経路探索結果を地図情報とあわせて携帯端末の利用者に提示することで目的地点までの経路案内を実行する(ステップS14)。
The
Finally, the
(1)第一段階経路探索処理(図2:ステップS30)
第一段階経路探索部12は、ハードディスク11に記憶されている道路ネットワークに基づき、出発地点から目的地点までの最適経路をダイクストラ法により求める。
図3に示すように、まず、第一段階経路探索部12は、携帯端末20から受信した出発地点及び目的地点の情報により、出発地点と目的地点とを設定する(ステップS301)。具体的には、第一段階経路探索部12は、出発地点の座標情報(緯度、経度)に最も近いリンクまたはノードを出発地点として決定する。目的地点についても同様である。本実施例では、出発地点及び目的地点が何れもノードであるとして説明する。
(1) First-stage route search process (FIG. 2: Step S30)
The first stage
As shown in FIG. 3, first, the first stage
第一段階経路探索処理において、通常のダイクストラ法を用いて最適経路を探索する場合、あらゆるリンクに探索枝が延びるため探索処理負荷が大きくなる場合もある。そこで本実施例では、探索負荷を軽減するために探索枝が延びるリンクを制限する。具体的には、幅員が一定幅以上である道路に対応するリンクのみを用いて最適経路の探索を行う。一例としては、道路レベルが県道以上である道路に対応するリンクのみを用いる。また、リンクに属性情報として付与されている幅員情報から、一定幅以上の道路のみを用いてもよい。
なお、出発地点及び目的地点付近については県道以上の道路でない場合もある。したがって、出発地点及び目的地点付近についてはすべてのリンクを用いるようにしてよい。
In the first stage route search processing, when searching for the optimum route using the normal Dijkstra method, the search branch may extend to every link, and the search processing load may increase. Therefore, in this embodiment, in order to reduce the search load, the link where the search branch extends is limited. Specifically, the optimum route is searched using only the link corresponding to the road whose width is a certain width or more. As an example, only a link corresponding to a road whose road level is a prefectural road or higher is used. Further, only roads having a certain width or more may be used from the width information given as attribute information to the link.
There may be cases where the vicinity of the departure point and the destination point is not a prefectural road. Therefore, all links may be used near the departure point and the destination point.
次に、第一段階経路探索部12は、出発地点であるノードにリンクを介して直接接続されるノードをすべて候補ノードに設定する(ステップS302)。
続いて、第一段階経路探索部12は、設定された候補ノードのうち、当該候補ノードに至るまでの累計コストが最小となる候補ノードを確定ノードに決定する(ステップS303)。
Next, the first-stage
Subsequently, the first-stage
ここで、第一段階経路探索部12は、確定ノードが目的地点に対応するノードであるか否かを判断する(ステップS304)。
確定ノードが目的地点に対応するノードでないと判断された場合(ステップS304:NO)、第一段階経路探索部12は、新たな候補ノードを設定する(ステップS305)。具体的には、第一段階経路探索部12は、確定ノードにリンクを介して接続される全てのノードを新たな候補ノードに設定する。そして、新たに設定された候補ノードに対して、第一段階経路探索部12は、確定ノードの決定処理を実行する(ステップS303)。
Here, the first stage
When it is determined that the confirmed node is not a node corresponding to the destination point (step S304: NO), the first stage
一方、確定ノードが目的地点に対応するノードであると判断された場合(ステップS304:YES)、第一段階経路探索部12は、出発地点から目的地点までの複数のリンク及びノードのコストを累計した値が最小となる経路を最適経路として決定する(ステップS306)。そして、第一段階経路探索部12は第一段階経路探索処理を終了する。
On the other hand, when it is determined that the confirmed node is a node corresponding to the destination point (step S304: YES), the first stage
(2)所定領域選択処理(図2:ステップS40)
以下では、リンクに、道路の種別を表わす道路種別属性情報が付与されている場合を例に説明する。一例として、リンクに対応する道路が国道の場合に道路種別属性情報は道路レベル1、都道府県道の場合に道路種別属性情報は道路レベル2、一般道の場合に道路種別属性情報は道路レベル3とする。また、第一段階経路探索部12における経路探索によって求められた最適経路は、道路種別が都道府県道(道路レベル2)であることを示す道路属性情報が付与されたリンクで構成されている場合を例に説明する。
(2) Predetermined area selection process (FIG. 2: Step S40)
Hereinafter, a case where road type attribute information representing a road type is given to the link will be described as an example. For example, the road type attribute information is
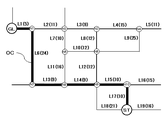
図4に示すように、許容コスト設定部13は、許容コストの設定を行なう(ステップS401)。許容コストの意義は次のとおりである。図5において、最適経路OC(リンクL17,L15,L14,L13,L6,L1)は、出発地点STから目的地点GLまでの経路のうち、リンクコスト(図6参照)の累計値が最小となる経路である。この最適経路OCとは異なる別の経路(類似経路)を選び出す場合、リンクコストの累計値が最小であるという制約条件を取り払うことになる。許容コストとは、この制約条件を取り払った場合において経路を探索する領域が際限なく広がることを制限するための条件となるものである。以下では、所定領域選択処理において許容コスト設定部13が許容コストを3と設定した場合を例に説明する。
As shown in FIG. 4, the allowable
なお、許容コストの値を大きくすれば、出発地点から目的地点までの経路を探索する際に探索枝が延びる範囲(所定領域)は広くなり得る。その結果として、大回りして目的地点に到着するといった経路が探索される場合もある。それでも許容コストの値を大きくする例としては、目的地点に到着しなければならない時間に余裕があり、寄り道しながら散策したい場合などがあげられる。 If the value of the allowable cost is increased, the range (predetermined area) in which the search branch extends when searching for a route from the departure point to the destination point can be widened. As a result, there may be a search for a route that makes a round and arrives at the destination. Still, an example of increasing the value of the allowable cost is when you have time to arrive at the destination and you want to take a walk while taking a detour.
次に、領域選択部14は、最適経路OCを構成するリンクの中から、所定領域選択処理において所定領域PDを選択する際の基準となるリンク(以下、「領域選択基準リンク」という)を設定する(ステップS402)。この領域選択基準リンクは、所定領域PDを選択する際に当該所定領域PDを規定する外周の一部を構成する。したがって、領域選択基準リンクは最適経路OC上の連続する複数のリンクであってもよい。領域選択基準リンクを領域選択の際の基準とすることで、求められた所定領域PDの範囲においてある地点からいったんは最適経路OCとは異なる経路を通る経路(いわば迂回経路)を採用したとしても、当該迂回経路は目的地点GL寄りの別の地点で最適経路OCに帰着することになる。
Next, the
ここで、領域選択基準リンクの設定方法の一例を、図5を用いて説明する。
なお、図5において、リンクL1〜L6,L8,L12〜L17に対応する道路が県道で、それ以外のリンクに対応する道路が市道であるとして以下では説明する。
領域選択部14は、最適経路OCに含まれるノード(ノードN1,N7〜N10)のうち、道路レベルが高い道路(例えば県道以上の道路)であってかつ最適経路OCに含まれない道路に接続しているノード(ノードN1,N9)を抽出する。そして、領域選択部14は抽出されたノードが複数の場合、最も出発地点ST側に位置するノード(ノードN9)及び最も目的地点GL側に位置するノード(ノードN1)の間に存在するリンク(リンクL6,L13,L14)を領域選択基準リンクとして設定する。
Here, an example of a method for setting the region selection reference link will be described with reference to FIG.
In FIG. 5, the roads corresponding to the links L1 to L6, L8, and L12 to L17 are prefectural roads, and the roads corresponding to the other links are city roads.
The
領域選択基準リンクの設定方法は、これに限られることはなく、他の方法を採用してもよい。例えば、最適経路OCにおいて、右左折する地点(ノードN7やノードN10)の前後のリンク(リンクL6,L13及びリンクL15,L17)を領域選択基準リンクとして設定してもよい。また、最適経路OCにおいて、直進する経路に対応するリンク(リンクL13〜L15)を領域選択基準リンクとして設定してもよい。
以下では、連続するリンク列(リンクL6,L13,L14)を領域選択基準リンクとして説明する。
The method for setting the region selection reference link is not limited to this, and other methods may be adopted. For example, in the optimal route OC, links (links L6 and L13 and links L15 and L17) before and after a point (node N7 or node N10) that makes a right or left turn may be set as the region selection reference link. Further, in the optimal route OC, links (links L13 to L15) corresponding to the route going straight may be set as the region selection reference link.
In the following, a continuous link string (links L6, L13, L14) will be described as a region selection reference link.
次に、領域選択部14は、領域選択基準リンクの進入側(出発地点STに近い方の端部)に接続しているノードN9(進入側ノード)から最適経路OCには属さない他のリンク及びノードを経由し、領域選択基準リンクの退出側(目的地点GLに近い方の端部)に接続しているノードN1(退出側ノード)を終点とする道路レベルが高い道路(図5では県道)からなるリンクのつながりを探す。図6の例では、リンク列L12,L8,L3,L2が抽出される。
なお、以下では、領域選択基準リンクの退出側ノードN1を、「回帰ノード」ともいう。
Next, the
Hereinafter, the leaving node N1 of the area selection reference link is also referred to as a “regression node”.
そして、領域選択部14は、上記の抽出結果のうち、進入側ノードN9から発し回帰ノードN1に帰着するリンクの合計コストが、進入側ノードN9から回帰ノードN1までの、最適経路における合計コストに許容コストを加算した値以下という条件を満たす経路(迂回経路)が存在する否かを判別する(ステップS403)。
具体的には、図6に示すように、侵入側ノードN9から回帰ノードN1までの最適経路上のコストは42である。また、許容コストは3であることから、領域選択部14は、侵入側ノードN9から回帰ノードN1まで合計コスト45以内でたどり着けるリンクのつながりを探すことになる。図6の例では、リンクL12,L8,L3,L2をたどる経路が合計コスト44であるため、条件を満たす。
なお、コストはノードに対しても付与されている場合もあるが、ここではリンクのコストのみを考慮して処理を実行することとする。当然、ノードのコストを考慮した処理であってもよい。
Then, the
Specifically, as shown in FIG. 6, the cost on the optimum route from the intrusion side node N9 to the regression node N1 is 42. Further, since the allowable cost is 3, the
Note that the cost may be given to the node as well, but here, the process is executed considering only the cost of the link. Of course, the processing may take into account the cost of the node.
判別の結果、上記条件を満たす経路が存在するという判別結果が得られなかった場合(ステップS403:NO)とは、許容コストの制限範囲内で、進入側ノードN9から回帰ノードN1に帰着するリンクのつながりを求めることができなかった場合である。この場合、以降に詳述する第二段階経路探索部15の処理によって、所定領域の範囲内で、最適経路を構成するノードから発する迂回経路を求めようとしても、許容コストの制約条件を満たして最適経路に回帰できるルートを求めることができない可能性もある。そこで、領域選択部14は、領域処理が完了しているのか否かを判断する(ステップS406)。領域選択部14は、領域処理が完了していないと判断した場合には、新たに他の領域選択基準リンクを設定するところから処理を繰り返す(ステップS402)。
As a result of the determination, when the determination result that the route satisfying the above condition is not obtained (step S403: NO), the link resulting from the approaching node N9 to the regression node N1 within the allowable cost limit range. This is a case where it was not possible to seek a connection. In this case, even if an attempt is made to obtain a detour route originating from a node constituting the optimum route within a predetermined area by the process of the second stage
一方、領域選択部14は、上記条件を満たす経路が1つ以上存在するという判別結果が得られた場合(ステップS403:YES)、次の処理を実行する。
On the other hand, if the determination result that there is one or more routes satisfying the above condition is obtained (step S403: YES), the
領域選択部14は、進入側ノードN9を発して、最適経路OCには属さないノードを経由し、回帰ノードN1を終点とする複数のリンクのつながりを求める。その上で、領域選択部14は、領域選択基準リンク(リンクL6,L13,L14)と、得られたリンクコストの累計値が最も大きい値をとりつつ許容コスト内におさまるリンク列(リンクL12,L8,L3,L2)とで規定される領域を所定領域PDに設定する(ステップS404)。
The
領域選択部14は、所定領域OCが予め決められている数(例えば2)だけ選択されたか否かを判断する(ステップS405)。なお、所定領域OCの数は、あらかじめユーザにより設定されているものとする。
領域選択部14は、所定領域OCが予め決められている数だけ選択されていると判断した場合には(ステップS405:YES)、領域選択処理を終了する。
一方、所定領域OCが予め決められている数だけ選択されていないと判断した場合には(ステップS405:NO)、領域選択部14は、領域選択処理が完了条件を満たすか否かを判断する(ステップS406)。領域選択部14は、完了条件を満たしていないと判断した場合には、領域選択処理(ステップS402〜S404)を繰り返す。一方、領域選択処理が完了条件を満たすと判断した場合には、領域選択部14は、処理を終了する。
ここで、領域選択処理の完了条件としては、領域選択部14によって、最適経路OCを構成するノードのうち、進入側ノードあるいは回帰ノードとして設定可能なすべてのノードについて、迂回経路の有無に関するすべての確認処理が実行された場合等があげられる。
The
When the
On the other hand, if it is determined that a predetermined number of predetermined areas OC have not been selected (step S405: NO), the
Here, as a condition for completing the area selection process, all the nodes related to the presence or absence of the detour path are set for all nodes that can be set as the entry side node or the regression node among the nodes constituting the optimum path OC by the
(3)第二段階経路探索処理(図2:ステップS50)
第二段階経路探索部15が探索する類似経路の探索範囲は、最適経路に対応するリンクデータ及びノードデータ、並びに領域選択部14により選択された所定領域内に存在するリンクデータ及びノードデータに制限される。そのため、第二段階経路探索部15における探索時の処理負荷が軽減される。
(3) Second stage route search process (FIG. 2: Step S50)
The search range of similar routes searched by the second-stage
図7に示すように、まず、第二段階経路探索部15は、領域選択処理の結果得られた所定領域内に存在する道路を表わすリンクデータ及びノードデータ、並びに最適経路に対応するリンクデータ及びノードデータをハードディスク11から読み出す(ステップS501)。なお、読み出されたリンクデータ及びノードデータは、図示しないDRAM等のメモリに記憶される。
As shown in FIG. 7, first, the second stage
次に、第二段階経路探索部15は、最適経路に含まれるノードである各最適ノードを起点として、領域選択部14で設定を受けた所定領域に含まれるとして抽出されたリンクデータ及びノードデータのみを用いて、確定ラベルと負けラベルとの差(以下、「経路別コスト差」ともいう。)が許容コスト以下である非最小コスト経路があるか否かを判定する(ステップS502)。ここで、確定ラベルとは出発地点からあるノードまでの最小コスト経路のコスト累計値である。また、負けラベルとは出発地点からあるノードまでの非最小コスト経路のコスト累計値である。
Next, the second-stage
図8の例において、経路探索時にノードN5に到達する際の確定ラベルはリンクL17,L15、L12,L10のコストを加算した44となる。一方、負けラベルはリンクL17、L15,L14,L11のコストを加算した45となる。すなわち、ノードN5には確定ラベルとして44が、負けラベルとして45が付与されることになる。このように、第二段階経路探索部15は通常のダイクストラ法で算出する確定ラベルに加えて負けラベルについても算出する。
In the example of FIG. 8, the confirmed label when reaching the node N5 at the time of route search is 44 obtained by adding the costs of the links L17, L15, L12, and L10. On the other hand, the losing label is 45 which is obtained by adding the costs of the links L17, L15, L14 and L11. That is, the node N5 is given 44 as a confirmed label and 45 as a losing label. In this way, the second-stage
経路別コスト差が許容コスト以下である非最小コスト経路を有する最適ノードがないと判定された場合(ステップS502:NO)、第二段階経路探索部15は、類似経路がないと決定して、第二段階経路探索を終了する。一方、ある最適ノードにおいて、経路別コスト差が許容コスト以下である非最小コスト経路があると判定された場合(ステップS502:YES)、第二段階経路探索部15は、当該最適ノードにおける類似経路を探索する。
When it is determined that there is no optimal node having a non-minimum cost route whose cost difference by route is equal to or less than the allowable cost (step S502: NO), the second-stage
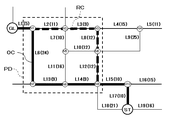
第二段階経路探索部15は、経路別コスト差が3以下である非最小コスト経路を探索すると、図8に示すように、最適経路OCに含まれる最適ノードのうち、ノードN1,N8,N9とにおいて、経路別コスト差が3以下である非最小コスト経路を抽出する。ノードN1において経路別コスト差が2である非最小コスト経路は、出発地点STからノードN9までは最適経路と同じ経路を通過し、ノードN9からリンクL12、ノードN6、リンクL8、ノードN3、リンクL3、ノードN2、リンクL2を通過してノードN1へと到達し、ノードN1から目的地GLまでは最適経路と同じ経路を通過する経路(以下、「第1経路」ともいう)である。
When the second stage
なお、ノードN9において経路別コスト差が1である非最小コスト経路としては、出発地点STからリンク18を通過してノードN9へと入り、ノードN9から最適経路と同じ経路を通過する経路(以下、「第2経路」ともいう)がある。しかしながら、リンクL18は、所定領域PD内に存在するリンク、最適経路を構成するリンクのいずれのリンクにも該当しない。したがって、第2経路について第二段階経路探索部15が探索の対象とすることはない。結果として、第二段階経路探索部15は、第1経路を類似経路RCとして決定する(ステップS503)。
As the non-minimum cost route having a cost difference by route of 1 at the node N9, the route passes from the departure point ST to the node N9 through the link 18 and passes through the same route as the optimum route from the node N9 (hereinafter referred to as the optimal route). , Also referred to as “second route”). However, the link L18 does not correspond to any of the links existing in the predetermined area PD and the links constituting the optimum route. Therefore, the second-stage
次に、第二段階経路探索部15は、最適経路には含まれずに類似経路にのみ含まれる各準最適ノードにおいて、経路別コスト差が最適経路と類似経路とにおけるコスト累計値の差を許容コストから差し引いた値(以下、「差分許容コスト」ともいう)以下である非最小コスト経路があるか否かを判定する(ステップS504)。準最適ノードにおいて、経路別コスト差が差分許容コスト以下である非最小コスト経路がないと判定された場合(ステップS504:NO)、第二段階経路探索部15は、第二段階経路探索を終了する。ある準最適ノードにおいて、経路別コスト差が差分許容コスト以下である非最小コスト経路があると判定された場合(ステップS504:YES)、第二段階経路探索部15は、当該準最適ノードにおいて準類似経路を探索する。
Next, the second-stage
図9に示すように、第二段階経路探索部15は、第1経路における準最適ノードであるノードN2,N3,N6において、経路別コスト差が差分許容コスト以下である非最小コスト経路を抽出する。ノードN6において経路別コスト差がゼロである非最小コスト経路は、出発地点STからノードN6までは第1経路と同じ経路を通過し、ノードN6からリンクL10、ノードN5、リンクL7、ノードN2へと到達し、ノードN2からは第1経路と同じ経路を通過する経路(以下、「第1準経路」ともいう)である。
As illustrated in FIG. 9, the second-stage
第二段階経路探索部15は、第1準経路SRCを準類似経路として決定する(図7のステップS505)。
The second stage
次に、第二段階経路探索部15は、準類似経路を類似経路として設定し(ステップS506)、新たに設定された類似経路における準最適ノードにおいて、準類似経路存在判定処理(ステップS504)を準類似経路がないと判定されるまで繰り返す。経路別コスト差が差分許容コスト以下である非最小コスト経路を有する準最適ノードがないと判定されると(ステップS504:NO)、第二段階経路探索部15は、準類似経路がないと決定して、類似経路探索処理を終了する。
Next, the second-stage
<実施例の効果>
以上説明した本実施例によれば、経路探索装置が最適経路とは別の類似経路を探索する処理において、最適経路並びに所定範囲内のリンク及びノードのみを用いて類似経路を探索するため、ダイクストラ法に基礎を置く経路探索法を用いたとしても、探索枝が四方八方に延びることを抑止できる。このため、経路探索装置がアルゴリズムとしてダイクストラ法を用いたとしてもその処理負荷が過重になることなく、経路探索結果を複数提示することが可能になる。
<Effect of Example>
According to the present embodiment described above, in the process of searching for a similar route different from the optimal route, the route search device searches for a similar route using only the optimal route and links and nodes within a predetermined range. Even if a route search method based on the law is used, the search branch can be prevented from extending in all directions. For this reason, even if the route search apparatus uses the Dijkstra method as an algorithm, it is possible to present a plurality of route search results without excessive processing load.
また、本実施例では、探索範囲を規定する所定領域を求めるために、道路種別が都道府県道を表わすリンクを外周とする領域を選択する処理を行なう。これにより、所定領域の選択処理において、都道府県道に比べ多数存在する一般道を表わすリンクを処理の対象とせず、効率的に所定領域を選択することが可能になる。 Further, in this embodiment, in order to obtain a predetermined area that defines the search range, a process is performed for selecting an area having a road whose outer periphery is a link whose road type represents a prefectural road. As a result, in the selection process of the predetermined area, it is possible to efficiently select the predetermined area without using the links representing the general roads that are present in comparison with the prefectural roads.
また、本実施例では、所定領域選択の指標として許容コストを用いることによって、最適経路上のノードから類似経路を求めることのできる蓋然性のあるリンク及びノードのみを対象とした類似経路探索の処理を可能としている。さらに、本実施例では、所定領域の候補が複数存在する場合において、出発地点から目的地点の方向に沿った領域候補を所定領域に設定するという処理基準を適用することで、最適経路からの迂回経路をなるべく多く含むようにして類似経路を探索することを可能にしている。 Further, in this embodiment, by using an allowable cost as an index for selecting a predetermined area, a similar route search process for only a probable link and a node that can obtain a similar route from a node on the optimum route is performed. It is possible. Further, in the present embodiment, when there are a plurality of candidates for a predetermined area, a processing standard for setting the area candidate along the direction from the departure point to the destination point as the predetermined area is applied, thereby bypassing the optimum route. It is possible to search for similar routes by including as many routes as possible.
<変形例1>
上記実施例において、領域選択部14は、進入側ノードから発し回帰ノードに帰着するリンクのつながりのリンクコストの累計値と最適経路における進入側ノードから回帰ノードまでのリンクコストの累計値との乖離が、許容コスト以下となっているリンクのつながりが存在するか否かを判別する。
しかしながら、所定領域を選択する手法は、道路ネットワークデータを利用する手法に限られない。他の例として、道路を表現した道路ポリゴンや河川などの水系を表現した河川ポリゴン等の地図表示のための情報を利用する手法が挙げられる。領域選択部14は、最適経路を構成するリンクに対応する道路ポリゴン及び他の道路ポリゴンや河川ポリゴン等で規定される閉じた領域を所定領域として設定してもよい。
<
In the above embodiment, the
However, the method for selecting the predetermined area is not limited to the method using road network data. As another example, there is a method of using information for map display such as road polygons representing roads and river polygons representing water systems such as rivers. The
<変形例2>
上記実施例において、領域選択部14は、進入側ノードから発し回帰ノードに帰着するリンクのつながりであって、最適経路から乖離した部分のリンクコストの累計値が許容コスト以下となっているリンクのつながりが存在するかを判別する。
ここで、最適経路に含まれる領域選択基準リンクと同じ道路属性情報(例えば県道)を有するリンクのみを用いた場合、進入側ノードから回帰ノードに帰着するリンクのつながりが得られない場合がありうる。具体的には、最適経路の付近に県道以上の大きな道路が存在していない場合などである。こうした場合においては、道路レベルの低い(例えば市道)道路に対応するリンクを利用して所定領域を選択してもよい。
<Modification 2>
In the above embodiment, the
Here, when only the link having the same road attribute information (for example, prefectural road) as the area selection reference link included in the optimum route is used, there is a case where the link of the link that results in the return node to the return node may not be obtained. . Specifically, there is a case where there is no large road more than the prefectural road near the optimum route. In such a case, the predetermined area may be selected using a link corresponding to a road having a low road level (for example, a city road).
<変形例3>
領域選択部14は、所定領域を他の方法によって選択してもよい。
例えば、図10に示すように、領域選択部14は、3次メッシュ(TM1〜4)の区画を所定領域として選択する。なお、メッシュとは、地図を緯度・経度に基づいて網の目状に区画する方法である。2次メッシュとは、緯度差5分、経度差7分30秒で、一辺の長さが約10kmのメッシュデータである。3次メッシュとは、2次メッシュを緯度方向及び経度方向に10等分してできる区域であり、緯度差30秒、経度差45秒で、一辺の長さが約1kmの矩形状の領域である。
<Modification 3>
The
For example, as illustrated in FIG. 10, the
3次メッシュを選択する方法としては、様々な方法がある。具体的には以下のような3次メッシュを選択対象とすることが考えられる。
・出発地点STに対応するノードが含まれる3次メッシュ(TM4)
・目的地点GLに対応するノードが含まれる3次メッシュ(TM1)
・出発地点STと目的地点GLとの中間地点に対応するリンクまたはノードが含まれる3次メッシュ
・最適経路OCを構成するリンク、ノードを含むすべての3次元メッシュ(TM1,TM2,TM4)
・最適経路OCを構成するリンク、ノードを最も多く含む3次元メッシュ(TM1)
・出発地点STから目的地点GLに仮想直線を引いた場合における、当該仮想直線が通過する3次メッシュ
There are various methods for selecting a tertiary mesh. Specifically, it is conceivable to select the following tertiary mesh.
A tertiary mesh (TM4) that includes a node corresponding to the departure point ST
A tertiary mesh (TM1) that includes a node corresponding to the destination point GL
A tertiary mesh including a link or node corresponding to an intermediate point between the departure point ST and the destination point GL. All three-dimensional meshes including links and nodes constituting the optimum route OC (TM1, TM2, TM4).
A three-dimensional mesh (TM1) that contains the most links and nodes that make up the optimal path OC
A tertiary mesh through which the virtual straight line passes when a virtual straight line is drawn from the departure point ST to the destination point GL
<変形例4>
所定領域選択処理において、最適経路を構成する特定のノードに対応する交差点から脇道に逸れて再び当該交差点に帰る経路が選択されるようにしてもよい。具体的には、領域選択部14は、領域選択基準リンクの代わりに、最適経路を構成する何れかのノードを領域選択基準ノードとして設定する。そして、領域選択部14は、当該域選択基準ノードから出発して許容コスト以内で戻る経路が含まれ得る領域を選択する。図11の場合、例えば、最適経路OCを構成するノードN7からリンクL20,ノードN11,リンクL21,ノードN12,リンクL22を経由して再びノードN7へと戻る経路で規定される領域が選択されることになる。
<Modification 4>
In the predetermined area selection process, a route that deviates from the intersection corresponding to a specific node constituting the optimum route and returns to the intersection again may be selected. Specifically, the
<変形例5>
上記実施例において、所定領域選択処理において所定領域を選び取る基準となる領域基準リンクとして歩道属性情報が付与されたリンクを用いてもよい。
道路ネットワークデータには、リンクに対応する道路に歩道がある場合に、歩道があることを示す情報としての歩道属性情報が付与されている。領域選択部14は、最適経路を構成する少なくとも1つのリンクと、そのリンクにノードを介して直接的又は間接的に接続されており歩道属性情報が付与されている複数のリンクとを外周辺とする領域を所定領域として選択する。具体的には、領域選択部14は、最適経路に含まれており歩道属性情報が付与されたリンクを、領域選択基準リンクとして設定する。そして、領域選択部14は、当該領域選択基準リンクに接続している進入側ノードから最適経路には属さない他のリンク及びノードを経由し、回帰ノードに至る経路で規定される領域を所定領域として選択する。
その前提として、第一段階経路探索部12は、歩道属性情報が付与された道路を表わすリンクを用いて最適経路を探索する。
<
In the above embodiment, a link provided with sidewalk attribute information may be used as a region reference link serving as a reference for selecting a predetermined region in the predetermined region selection process.
In the road network data, when there is a sidewalk on the road corresponding to the link, sidewalk attribute information as information indicating that there is a sidewalk is given. The
As a premise thereof, the first stage
<変形例6>
上記実施例において、第一段階経路探索部12は、出発地点から目的地点までのリンクコストの累計値が最小となる経路のみを最適経路として決定した。しかし、第一段階経路探索部12によって決定される最適経路は複数であってもよい。例えば、リンクコストの累計値が同一である経路が複数ある場合には、当該複数の経路を最適経路としてもよい。また、リンクコストの累計値が最小ではないが、最小の累計値との乖離が一定の許容限度を超えない経路もまた最適経路に含めてもよい。
<Modification 6>
In the above embodiment, the first-stage
10…経路探索装置としてのサーバ、
11…道路ネットワークデータ記憶部としてのハードディスク、
12…第一段階経路探索部、
13…許容コスト設定部、
14…領域選択部、
15…第二段階経路探索部、
ST…出発地点、
GL…目的地点。
10: Server as a route search device,
11: Hard disk as road network data storage unit,
12 ... First stage route search unit,
13 ... Allowable cost setting section,
14 ... area selection part,
15 ... Second stage route search unit,
ST ... Departure point,
GL ... Destination point.
Claims (6)
道路をノード及び通行の難易度を示すコストに関するコスト情報が付与されているリンクで表現した道路ネットワークデータが記憶された道路ネットワークデータ記憶部と、
前記出発地点から前記目的地点までの経路であって、該経路を構成する複数の前記リンクのコストを累計して求めた累計コストが最小となる最適経路を求める第一段階経路探索部と、
許容コストを設定する許容コスト設定部と、
前記最適経路を構成するリンクの少なくとも一部が包含され、かつ、前記第一段階経路探索部において経路探索処理対象となったリンクの総数よりも少ないリンク本数のリンクを包含する所定領域を選択する領域選択部と、
前記道路ネットワークデータを構成するノード及びリンクのうち前記所定領域に存在する道路に対応しないノード及びリンクを、前記出発地点から目的地点までの経路であって最適経路以外の経路の候補として探索する対象から省き、前記所定領域の内部に存在する道路に対応する前記ノード及びリンクを用いて前記所定領域の内部における経路を探索することにより、前記最適経路のほかに、前記所定領域の少なくとも一部を介した前記出発地点から目的地点までの経路であって該経路を構成する複数のリンクの累計コストと前記最適経路の累計コストとの乖離が前記許容コスト以下となる経路を求める第二段階経路探索部と
を備える経路探索装置。 A route search device for searching a route from a departure point to a destination point,
A road network data storage unit in which road network data representing roads represented by links to which cost information relating to costs indicating the difficulty of nodes and traffic is given;
A first-stage route search unit for obtaining an optimum route that is a route from the departure point to the destination point and that has a minimum accumulated cost obtained by accumulating the costs of the plurality of links constituting the route;
An allowable cost setting unit for setting the allowable cost;
At least partially encompass the links constituting the optimal path, and selects a predetermined region you include fewer number of links of the link than the total number of first stage link path becomes route search target in the search unit An area selection section to perform,
Target to search for nodes and links that do not correspond to roads existing in the predetermined area among the nodes and links constituting the road network data as a route candidate other than the optimum route that is a route from the departure point to the destination point In addition to the optimum route , at least a part of the predetermined region is searched by searching for a route inside the predetermined region using the nodes and links corresponding to roads existing inside the predetermined region. A second-stage route search for obtaining a route from the starting point to the destination point via which the difference between the accumulated cost of a plurality of links constituting the route and the accumulated cost of the optimum route is equal to or less than the allowable cost A route search device comprising a unit.
前記領域選択部は、前記最適経路を構成する少なくとも1つのリンクと、該リンクにノードを介して直接的又は間接的に接続されており前記道路種別属性情報が特定の種別である複数のリンクとを外周辺とする領域を前記所定領域として選択する請求項1に記載の経路探索装置。 The link is provided with road type attribute information indicating the type of road,
The area selection unit includes at least one link configuring the optimum route, and a plurality of links that are directly or indirectly connected to the link via a node and in which the road type attribute information is a specific type. The route search device according to claim 1, wherein an area having an outer periphery is selected as the predetermined area.
前記領域選択部は、前記最適経路を構成する少なくとも1つのリンクと、該リンクにノードを介して直接的又は間接的に接続されており前記歩道属性情報が付与されている複数のリンクとを外周辺とする領域を前記所定領域として選択する請求項1記載の経路探索装置。 When the road corresponding to the link is a sidewalk, the link is given sidewalk attribute information as information indicating that the link is a sidewalk.
The area selecting unit excludes at least one link constituting the optimum route and a plurality of links to which the sidewalk attribute information is attached directly or indirectly connected to the link via a node. The route search device according to claim 1, wherein an area to be a periphery is selected as the predetermined area.
前記第一段階経路探索部は、特定の前記道路種別属性情報が付与されたリンクのみを用いて前記最適経路を求める請求項1に記載の経路探索装置。 The link is provided with road type attribute information indicating the type of road,
2. The route search device according to claim 1, wherein the first-stage route search unit obtains the optimum route using only a link to which the specific road type attribute information is assigned.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013269905A JP6307270B2 (en) | 2013-12-26 | 2013-12-26 | Route search device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013269905A JP6307270B2 (en) | 2013-12-26 | 2013-12-26 | Route search device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015125065A JP2015125065A (en) | 2015-07-06 |
| JP2015125065A5 JP2015125065A5 (en) | 2016-08-12 |
| JP6307270B2 true JP6307270B2 (en) | 2018-04-04 |
Family
ID=53535860
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013269905A Expired - Fee Related JP6307270B2 (en) | 2013-12-26 | 2013-12-26 | Route search device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6307270B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112556693A (en) * | 2019-09-25 | 2021-03-26 | 北京天诚同创电气有限公司 | Navigation method and device for operation and maintenance path of photovoltaic power station |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3517029B2 (en) * | 1995-06-08 | 2004-04-05 | 株式会社ザナヴィ・インフォマティクス | In-vehicle route search device |
| JP2002139336A (en) * | 2000-10-31 | 2002-05-17 | Matsushita Electric Ind Co Ltd | Navigation device |
| JP2002181570A (en) * | 2000-12-11 | 2002-06-26 | Matsushita Electric Ind Co Ltd | Navigation system |
| JP2002277270A (en) * | 2001-03-19 | 2002-09-25 | Minolta Co Ltd | Route guidance system |
| US20090125229A1 (en) * | 2007-11-14 | 2009-05-14 | Telmap, Ltd. | Corridor mapping with alternative routes |
| JP5513215B2 (en) * | 2009-03-31 | 2014-06-04 | 株式会社ゼンリン | Route search device, data structure of network data, and network data generation device |
-
2013
- 2013-12-26 JP JP2013269905A patent/JP6307270B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015125065A (en) | 2015-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5277223B2 (en) | Route search device | |
| JP4513073B2 (en) | Navigation device and program | |
| JP5066006B2 (en) | Route search device, route search method, route search program, and map data | |
| US10989553B2 (en) | Method, apparatus and computer program product for determining likelihood of a route | |
| JP5547106B2 (en) | Route arithmetic unit | |
| KR20070032948A (en) | Route navigation device, route navigation method and program | |
| US20100057357A1 (en) | Device for selecting area to be introduced and method thereof | |
| JP2013050413A (en) | Navigation system, navigation program, and navigation method | |
| JP4571169B2 (en) | Navigation system, route search server, terminal device, and route guidance method | |
| JP5114254B2 (en) | Map display system, route search server, route search method, and terminal device | |
| WO2015059872A1 (en) | Map data delivery system, server, and navigation device | |
| JP6912859B2 (en) | Map update device, map update method, computer program, and recording medium on which the computer program is recorded. | |
| JP6307270B2 (en) | Route search device | |
| JP5768526B2 (en) | Traffic jam prediction device and traffic jam forecast data | |
| CN112766606B (en) | Method, device and equipment for planning traffic route and computer readable storage medium | |
| JP5288239B2 (en) | Route search method | |
| JP2010054754A (en) | Data structure of map data | |
| JP5660938B2 (en) | Routing device | |
| KR100612038B1 (en) | Method and System for Finding Path for Navigation Service | |
| JP2010217459A (en) | Device, system, program, and method for managing road network diagram | |
| JP2007279005A (en) | Travel guiding device for vehicle, and map storage medium | |
| JP6385255B2 (en) | Route search system, route search method, computer program | |
| JP6071693B2 (en) | Route search device and route search system | |
| JP6374772B2 (en) | Route search system, route search method, computer program | |
| KR101123274B1 (en) | A course search method which uses a link division and course re-search method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160624 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160624 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170523 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170713 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6307270 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |