JP2017006644A - Muscle electrostimulator - Google Patents
Muscle electrostimulator Download PDFInfo
- Publication number
- JP2017006644A JP2017006644A JP2016106643A JP2016106643A JP2017006644A JP 2017006644 A JP2017006644 A JP 2017006644A JP 2016106643 A JP2016106643 A JP 2016106643A JP 2016106643 A JP2016106643 A JP 2016106643A JP 2017006644 A JP2017006644 A JP 2017006644A
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- electrodes
- output
- unit
- electrical stimulation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Landscapes
- Electrotherapy Devices (AREA)
Abstract
Description
本発明は、筋肉電気刺激装置に関する。 The present invention relates to an electrical muscular stimulation device.
従来、筋繊維に電流を流すと筋収縮を起こすことが広く知られている。特に医療・スポーツの分野にて、筋肉増強を目的とした活用がなされている。具体的には、人体に張り付けた電極を介して通電し、電気信号に基づいて筋肉を緊張及び弛緩させる筋肉刺激方法が用いられている。 Conventionally, it is widely known that muscle contraction occurs when an electric current is applied to muscle fibers. In particular, it is used for the purpose of strengthening muscles in the medical and sports fields. Specifically, a muscle stimulation method is used in which electricity is applied through an electrode attached to a human body, and the muscle is tensioned and relaxed based on an electrical signal.
特許文献1には、電気信号を利用して筋肉に刺激を与える筋肉電気刺激装置として、電源を内蔵し操作部を有する本体部と、本体部から延設されたシート状の基材に形成された一対の電極とを備え、一対の電極を人体に張り付けることにより、電気パルスを人体に流して筋刺激を与えるように構成されたものが開示されている。そして、電極には粘着性及び導電性を有するゲル状のパッドが貼付されており、当該パッドの粘着性を利用して電極及び本体部が人体に貼り付けられるとともに、当該パッドの導電性を利用して電極と人体とを通電可能にしている。
In
特許文献1に開示の筋肉電気刺激装置では、一対の電極が備えられているにすぎず、複数の筋肉に効率よく電気刺激を付与することが困難である。そこで、電極の数を増やすことが考えられるが、単に電極の数を増やすと、電極と制御部との通電距離にばらつきが生じやすい。そして、かかる通電距離のばらつきに起因して、電極と制御部とを電気的に接続するリード部における電気抵抗が電極ごとにばらついて、各電極から出力される電気刺激がばらつきやすくなる。その結果、筋肉にバランス良く電気刺激を付与することが困難となる。一方、通電距離のばらつきを抑制するために、単に各リード部を同等の長さにすると、電極の配置の自由度が大きく低下してしまい、電極を筋肉に電気刺激を付与するのに適した位置に配置しにくくなる。
In the muscular electrical stimulation device disclosed in
本発明は、かかる背景に鑑みてなされたものであり、各電極から出力される電気刺激のばらつきが低減されるとともに、電極の配置の自由度が向上される筋肉電気刺激装置を提供しようとするものである。 The present invention has been made in view of such a background, and intends to provide a muscular electrical stimulation device in which variation in electrical stimulation output from each electrode is reduced and freedom of arrangement of electrodes is improved. Is.
本発明の一態様は、本体部と、該本体部に収納される電源部と、該電源部から電力が供給される複数の電極を有する電極部と、該電極部への電力供給を制御するとともに上記本体部に収納される制御部と、上記電極部と上記制御部とを電気的に接続するリード部と、を備え、上記電極部から人体に電気刺激を付与するように構成された筋肉電気刺激装置であって、
上記制御部は、同一極性の電圧が印加される複数の端子を有し、
上記リード部は、上記複数の端子同士を接続する端子接続部と、該端子接続部と上記複数の電極とを接続する電極接続部と、を有し、
上記各電極のそれぞれから上記端子までの最短経路の長さはそれぞれ、上記最短経路の平均長さとの差が、該平均長さの20%未満となっていることを特徴とする筋肉電気刺激装置にある。
One embodiment of the present invention controls a main body, a power supply housed in the main body, an electrode having a plurality of electrodes to which power is supplied from the power supply, and power supply to the electrode And a control part housed in the main body part, and a lead part for electrically connecting the electrode part and the control part, and a muscle configured to apply electrical stimulation to the human body from the electrode part An electrical stimulator,
The control unit has a plurality of terminals to which voltages of the same polarity are applied,
The lead portion includes a terminal connection portion that connects the plurality of terminals, and an electrode connection portion that connects the terminal connection portion and the plurality of electrodes,
The length of the shortest path from each of the electrodes to the terminal is different from the average length of the shortest path by less than 20% of the average length. It is in.
上記筋肉電気刺激装置では、複数の電極のそれぞれから複数の端子のいずれかまでの最短経路の長さはそれぞれ、上記最短経路の平均長さとの差が、該平均長さの20%未満となっている。そのため、電極と制御部との通電距離にばらつきが生じにくく、電極と制御部とを電気的に接続するリード部における電気抵抗の電極ごとのばらつきを低減できる。そのため、各電極から出力される電気刺激がばらつきにくくなり、筋肉にバランス良く電気刺激を付与することができる。 In the muscular electrical stimulation device, the length of the shortest path from each of the plurality of electrodes to any of the plurality of terminals is less than 20% of the average length of the average length of the shortest path. ing. Therefore, variation in the energization distance between the electrode and the control unit is unlikely to occur, and variation in electrical resistance in each lead portion that electrically connects the electrode and the control unit can be reduced. Therefore, the electrical stimulation output from each electrode becomes difficult to vary, and the electrical stimulation can be applied to the muscle with a good balance.
また、制御部には同一極性の電圧が印加される複数の電極が備えられているとともに、リード部には、当該複数の端子を接続する端子接続部と、該端子接続部と電極とを接続する電極接続部とが設けられている。これにより、リード部を介した上記最短経路を短く維持しつつ、電極の配置の自由度を高めることができる。その結果、電極を筋肉に電気刺激を付与するのに適した位置に配置しやすくなる。 The control unit is provided with a plurality of electrodes to which voltages of the same polarity are applied, and the lead portion is connected to a terminal connection portion for connecting the plurality of terminals, and the terminal connection portion and the electrode are connected to each other. And an electrode connecting portion to be provided. Thereby, the freedom degree of arrangement | positioning of an electrode can be raised, maintaining the said shortest path | route via a lead part short. As a result, it becomes easy to arrange the electrode at a position suitable for applying electrical stimulation to the muscle.
以上のように、本発明によれば、各電極から出力される電気刺激のばらつきが低減されるとともに、電極の配置の自由度が向上される筋肉電気刺激装置を提供することができる。 As described above, according to the present invention, it is possible to provide a muscular electrical stimulation device in which variation in electrical stimulation output from each electrode is reduced and the degree of freedom of electrode placement is improved.
本明細書において、「各電極のそれぞれから端子までの最短経路」は、次のように規定される。まず、リード部において、一つの電極から一つの端子に電気的に繋がる経路を抽出する。そして、抽出した経路の各位置におけるリード部の幅方向の中央を結んだ経路仮想線を描き、その経路仮想線の長さを当該経路の長さとする。そして、一つの電極から複数の端子のそれぞれの経路の長さを導き出して、そのうち最も短いものを当該電極から端子までの最短経路とする。 In this specification, “the shortest path from each electrode to a terminal” is defined as follows. First, in the lead portion, a path electrically connected from one electrode to one terminal is extracted. Then, a route imaginary line connecting the centers in the width direction of the lead portions at each position of the extracted route is drawn, and the length of the route imaginary line is set as the length of the route. And the length of each path | route of several terminals is derived | led-out from one electrode, The shortest one is made into the shortest path | route from the said electrode to a terminal.
上記電極は、同一の仮想直線上に位置するように配置されていることが好ましい。この場合は、腹直筋のように、直線上に配列した複数の区画のそれぞれに電極を対応させやすくなるため、腹直筋等の筋肉を効果的に刺激することができる。 The electrodes are preferably arranged so as to be positioned on the same virtual straight line. In this case, like the rectus abdominis muscle, it becomes easy to make the electrode correspond to each of a plurality of sections arranged on a straight line, so that muscles such as the rectus abdominis muscle can be stimulated effectively.
上記同一極性の端子は、2個備えられていることが好ましい。この場合には、少ない構成で各電極との最短経路を短くすることができ、製造コストの低減を図ることができる。 It is preferable that two terminals having the same polarity are provided. In this case, the shortest path to each electrode can be shortened with a small configuration, and the manufacturing cost can be reduced.
上記電極部は、上記電極を3個有することとすることができる。この場合は、腹直筋が長手方向に3つに区画されている場合に、当該区画ごとに電極を対応させることができるため、腹直筋を一層効果的に刺激することができる。 The electrode part may have three electrodes. In this case, when the rectus abdominis muscle is divided into three sections in the longitudinal direction, the electrodes can be made to correspond to the sections, so that the rectus abdominis muscle can be stimulated more effectively.
上記電極部は、上記電極を4個有することとすることができる。この場合は、腹直筋が長手方向に4つに区画されている場合に、当該区画ごとに電極を対応させることができるため、腹直筋を一層効果的に刺激することができる。 The electrode part may have four electrodes. In this case, when the rectus abdominis muscle is divided into four in the longitudinal direction, the electrodes can be made to correspond to the sections, so that the rectus abdominis muscle can be stimulated more effectively.
上記複数の端子、上記3個以上の電極及び上記リード部はそれぞれ、上記本体部の中心を通る中心線により二分された一方の領域及び他方の領域の両方に配置されているとともに、上記一方の領域に配置される上記電極と上記他方の領域に配置される上記電極とは、互いに異なる極性の電圧が印加されるように構成されていることが好ましい。この場合には、上記中心軸が人の身長方向と平行となるようにして腹部の真ん中に取り付けると、各電極が左右の腹直筋にそれぞれ対応する位置に位置しやすくなるため、腹直筋を刺激するのに適した筋肉電気刺激装置となる。 The plurality of terminals, the three or more electrodes, and the lead portion are respectively disposed in both one region and the other region divided by a center line passing through the center of the main body portion, and It is preferable that the electrode arranged in the region and the electrode arranged in the other region are configured to be applied with voltages having different polarities. In this case, if the electrode is attached to the middle of the abdomen so that the central axis is parallel to the height direction of the person, each electrode is likely to be located at a position corresponding to the left and right abdominal rectus muscles. It becomes a muscular electrical stimulation device suitable for stimulating the body.
(実施例1)
実施例に係る筋肉電気刺激装置につき、図1〜図15を用いて説明する。
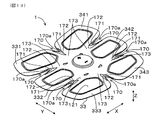
本例の筋肉電気刺激装置1は、図1、図2に示すように、本体部10、電源部20、電極部30、制御部40、リード部38(39)を備える。電源部20及び制御部40は、本体部10に収納されている。電極部30は、電源部20から電力が供給される3個以上の電極311〜313(321〜323)を有する。制御部40は、電極部30への電力供給を制御する。リード部38(39)は電極部30と制御部40とを電気的に接続する。そして、筋肉電気刺激装置1は、電極部30から人体2(図5参照)に電気刺激を付与するように構成されている。
制御部40は、同一極性の電圧が印加される複数の端子451、452(461、462)を有する。
リード部38(39)は、複数の端子451、452(461、462)同士を接続する端子接続部383(393)と、端子接続部383(393)と電極311〜313(321〜323)とを接続する電極接続部385〜387(395〜397)と、を有する。
各電極311〜313(321〜323)から端子451、452(461、462)までの最短経路L1〜L3(L4〜L6)の長さはそれぞれ、最短経路L1〜L3(L4〜L6)の平均長さとの差が、平均長さの20%未満となっている。
Example 1
The muscular electrical stimulation apparatus according to the embodiment will be described with reference to FIGS.
As shown in FIGS. 1 and 2, the electrical
The
The lead portion 38 (39) includes a terminal connection portion 383 (393) for connecting a plurality of
The lengths of the shortest paths L1 to L3 (L4 to L6) from the
以下、筋肉電気刺激装置1について詳述する。
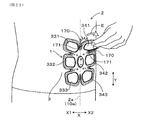
本例の筋肉電気刺激装置1は、図5に示すように、人体2の腹部3に取り付けて使用される。そして、本例では、人体2の背丈の長手方向を身長方向Yとする。また、人体2の正面に面して、身長方向Yに平行でへそ3aを通る人体2の中心軸2aから人体2の右手5a側への方向を右方向X1とし、中心軸2aから人体2の左手5b側への方向を左方向X2とする。そして、右方向X1と左方向X2とを合わせて左右方向Xという。
Hereinafter, the electrical
The electrical
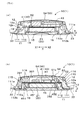
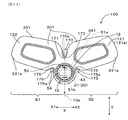
図1に示すように、筋肉電気刺激装置1の中央には、本体部10が設けられている。図1及び図3に示すように、本体部10は、略円盤状をなしている。図4(a)、図4(b)に示すように、本体部10は、後述の電源部20及び制御部40を収納するケース11と、ケース11に取り付けられて筋肉電気刺激装置1の外殻を形成する外殻形成体12と、からなる。
As shown in FIG. 1, a
図4に示すように、外殻形成体12は、後述の基材33が設けられる側の面12bと、その反対側の外表面12aとを有している。外殻形成体12はエラストマーからなり、本例では黒色のシリコン製である。そして、後述するように、基材33の表側面33bを覆うように、外殻形成体12から電極支持部121が延出されている。そして、電極支持部121の外表面121aには、図1に示すように、後述の各電極311〜313、321〜323の外縁に略沿った線状を成す着色領域122が形成されている。本例では、着色部122は橙色に着色されている。
As shown in FIG. 4, the outer
図4(a)、図4(b)に示すように、ケース11は凹状をなす第1ケース111と、第1ケース111に取り付けられて、第1ケース111との間に制御部40を収納する収納部13を形成する第2ケース112とからなる。第1ケース111及び第2ケース112はいずれもABS製である。そして、第2ケース112の外縁に沿って、立設されたリブ112aが、第1ケース111の外縁部111aの内側に嵌合して第1ケース111に第2ケース112が接合されている。
As shown in FIGS. 4A and 4B, the
第1ケース111には、図1、図4(b)に示すように、後述する操作部50の一部を形成する第1カンチレバー51a及び第2カンチレバー51bが形成されている。第1カンチレバー51a及び第2カンチレバー51bは、第1ケース111の壁の一部をくり抜いて片持ち梁の状態に形成されている。第1カンチレバー51aと第2カンチレバー51bとは、身長方向Yの上側から下側に向かって、この順で配列している。
As shown in FIGS. 1 and 4B, the
図1、図4(b)に示すように、両カンチレバー51a、51bは、外殻形成体12に覆われている。そして、外殻形成体12において、第1カンチレバー51aの直上には記号「+」が突出形成されており、第2カンチレバー51bの直上には記号「−」が突出形成されており、後述する操作部50の一部を形成する操作面54を形成している。両カンチレバー51a、51bの配列により、「+」が身長方向Yの上側となるとともに、「−」が身長方向Y下側となり、人間工学的に使用者が操作しやすいものとなっている。
As shown in FIGS. 1 and 4B, both
図4(a)、図4(b)に示すように、第1ケース111と第2ケース112との間に形成された収納部13には、制御部40(図8参照)を形成する制御基板41が収納されている。制御基板41はプリント基板であって、制御基板41には図示しない配線パターンと電子部品42等とが設けられて、制御回路が形成されている。制御基板41は、第1ケース111の内側面に突出形成された4つのボス116とねじ115を介して、第1ケース111に固定されている。また、制御基板41には、表面実装型の小型のスピーカ43が電気的に接続されている。電子部品42及びスピーカ43の駆動電圧は、いずれも3.0Vとなっている。また、図示しないが、制御基板41には、電池21の出力電圧を昇圧する昇圧回路が搭載されている。これにより、電池21の電力は所定の電圧(例えば、40V)に昇圧されて電極部30に供給される。
As shown in FIGS. 4A and 4B, the
また、図6に示すように、制御部40としての制御基板41には、第1端子群45及び第2端子群46が備えられている。第1端子群45は、図示しない配線パターンに接続された第1端子451と第2端子451を備える。第1端子451と第2端子451には、同一極性の電圧が印加されるように構成されている。一方、第2端子群46は、図示しない配線パターンに接続された第3端子461と第4端子462を備える。第3端子461と第4端子462には、同一極性の電圧が印加されるように構成されている。そして、第1端子群45(第1端子451及び第2端子451)と、第2端子群46(第3端子461と第4端子462)とは、互いに異なる極性の電圧が印加されるように構成されている。
As shown in FIG. 6, the
図4(b)に示すように、第1端子451は、制御基板41において、ボス116に対向する位置に形成されている。同様に、第2端子452、第3端子461、第4端子462もボス116に対向する位置に形成されている。そして、後述の第1リード部38の第2制御部側接続部382が、ボス116と制御基板41との間に挟み込まれて、これらと一体的に締結されている。これにより、制御基板41において、ボス116が対向する位置に形成された第2端子452と第2制御部側接続部382とが接続されることとなる。同様に、後述の第1端子451と第1リード部38の第1制御部側接続部381とが接続され、第3端子461と第2リード部39の第3制御部側接続部391とが接続され、第4端子462と第2リード部39の第4制御部側接続部392とが接続される。
As shown in FIG. 4B, the
図4(b)に示すように、収納部13には、操作部50を形成するスイッチ機構52も収納されている。スイッチ機構52はタクトスイッチであって、押下可能なスイッチ部53を備える。スイッチ機構52は制御部40に電気的に接続されている。スイッチ機構52は第1ケース111に形成された第1カンチレバー51a及び第2カンチレバー51b(図1参照)の直下にそれぞれ配設されている。これにより、第1ケース111を覆う外殻形成体12の操作面54を介して外部から第1カンチレバー51aを押圧すると、片持ち梁状態の第1カンチレバー51aが撓むことにより、スイッチ機構52のスイッチ部53が押下されるようになっている。そして、操作面54における押圧を解除すると、片持ち梁状態の第1カンチレバー51aの復元力により、第1カンチレバー51aは元の位置に戻ることとなる。第2カンチレバー51bにおいても同様に押圧及び押圧の解除が行われるように構成されている。
As shown in FIG. 4B, the
図4(a)、図4(b)に示すように、第2ケース112には、電源部20を構成する電池21を保持する電池保持部14が形成されている。これにより、本体部10に電源部20が内蔵されることとなっている。電池21は交換可能であって、例えば、コイン電池又はボタン電池とすることができる。本例では、電池21として、小型で薄型のコイン電池(リチウムイオン電池CR2032、公称電圧3.0V)を採用している。なお、当該電池21に替えて、公称電圧が3.0〜5.0Vの電池を採用することができる。
As shown in FIGS. 4A and 4B, the
上記電池21が保持される電池保持部14には、電池21の脱落を防止する蓋15が着脱可能に取り付けられている。蓋15は、電池21よりも一回り大きい円盤状をなしており、その外周には蓋15と第2ケース112との間をシールするОリング16が嵌装されている。電池21は、図示しないリードを介して制御部40に電気的に接続されている。図2に示すように、第2ケース112には、蓋15の外周から放射状に延びる線状の溝113が等間隔に複数形成されている。
A
図4(a)、図4(b)に示すように、第2ケース112には、リブ112aの外側に突出した鍔部112bが形成されている。鍔部112bと第1ケース111の外縁部111aとの間には、図示しない防水用両面シールを介して、シート状の基材33が挟持されている。基材33はPET製である。図2に示すように、基材33は、本体部10からシート状に延出している。図1及び図3に示すように、操作面54が露出する側の面である基材33の表側面33bは、外殻形成体12から延出された電極支持部121により覆われている。そして、基材33における表側面33bと反対側の裏側面33aは、筋肉電気刺激装置1における外殻形成体12側の面(表側面)と反対側の裏面側の全域に広がっている。そして、基材33と電極支持部121とは、図示しない3M社製の粘着テープ及びシリコン接着処理剤によって接合されている。
As shown in FIGS. 4A and 4B, the
図2及び図8に示すように、電極部30は第1電極群31と第2電極群32を備える。第1電極群31は、図5に示すように、腹部3に取り付けたときに中心線10aよりも人体2の右手5a側の右方向X1に位置するように、本体部10から延出している。第2電極群32は、図5に示すように、腹部3に取り付けたときに中心線10aよりも人体2の左手5b側の左方向X2に位置するように、本体部10から延出している。第1電極群31には、第1電極としての第1右側電極311、第2電極としての第2右側電極312及び第3電極としての第3右側電極313が含まれており、第2電極群32には、第1電極としての第1左側電極321、第2電極としての第2左側電極322及び第3電極としての第3左側電極323が含まれている。
As shown in FIGS. 2 and 8, the
各電極311〜313、321〜323はいずれも、角部が丸みを帯びた略長方形に形成されている。そして、各電極311〜313、321〜323の長手方向(例えば、第3右側電極313において符号wで示す方向)が、左右方向Xに概ね沿っている。本例では、各電極311〜313、321〜323はいずれも同一の形状を成している。各電極311〜313、321〜323の形状は、例えば、長手方向の長さをw、短手方向の長さをhとしたとき、h/wを0.40〜0.95、好ましくは0.50〜0.80とすることができ、本例では、h/wは0.55としている。
Each of the
図2に示すように、各電極311〜313、321〜323の内側には所定大きさの六角形をなす電極非形成部34が所定間隔をあけて、複数形成されている。また、第1右側電極311、第2右側電極312及び第3右側電極313には、リード部としての第1リード部38が接続されており、第1左側電極321、第2左側電極322及び第3左側電極323には、リード部としての第2リード部39が接続されている。
As shown in FIG. 2, a plurality of non-electrode forming
図6に示すように、リード部としての第1リード部38は、第1制御部側接続部群380と、第1端子接続部383と、第1電極接続部群384とを有する。第1制御部側接続部群380は、第1端子群45に属する複数の端子(第1端子451、第2端子452)に接続される複数の制御部側接続部(第1制御部側接続部381、第2制御部側接続部382)からなる。第1制御部側接続部381、第2制御部側接続部382は、それぞれ本体部10側に突出している。そして、図4(b)に示すように、第1制御部側接続部381及び第2制御部側接続部382は、それぞれ第1ケース111の内壁に沿って厚さ方向に折り曲げられるとともに、その先端が制御基板41と平行に折り曲げられる。そして、第1制御部側接続部381及び第2制御部側接続部382の先端が上述の如く、ボス116と制御基板41との間に挟み込まれている。
As shown in FIG. 6, the first
また、図6に示すように、端子接続部としての第1端子接続部383は、第1制御部側接続部群380に属する複数の制御部側接続部(第1制御部側接続部381、第2制御部側接続部382)が互いに通電するように形成されている。本例では、第1端子接続部383は本体部10の外縁10bに沿って略半円弧状を成している。そして、第1端子接続部383の一端に第1制御部側接続部381が設けられ、他端に第2制御部側接続部382が設けられている。
Further, as shown in FIG. 6, the first
また、第1電極接続部群384は、第1端子接続部383から第1電極群31に属する複数の電極(第1右側電極311、第2右側電極312、第3右側電極313)に向けて延びるとともに該複数の電極311〜313に接続される複数の電極接続部(第1電極接続部385、第2電極接続部386、第3電極接続部387)からなる。本例では、第1電極接続部385、第2電極接続部386、第3電極接続部387はいずれも線状に形成されている。
The first electrode
リード部としての第2リード部39は、第1リード部38と同様に、第2制御部側接続部群390と、第2端子接続部393と、第2電極接続部群394とを有する。第2制御部側接続部群390は、第2端子群46に属する複数の端子(第3端子461、第4端子462)に接続される複数の制御部側接続部(第3制御部側接続部391、第4制御部側接続部392)からなる。そして、第1リード部38と同様に、第3制御部側接続部391及び第4制御部側接続部392の先端がボス116と制御基板41との間に挟み込まれている。
Similar to the first
また、端子接続部としての第2端子接続部393は、第1リード部38の場合と同様に、第2制御部側接続部群390に属する複数の制御部側接続部(第3制御部側接続部391、第4制御部側接続部392)が互いに通電するように形成されている。本例では、第1リード部38の場合と同様に、第2端子接続部393は本体部10の外縁10bに沿って略半円弧状を成している。そして、第2端子接続部393の一端に第3制御部側接続部391が設けられ、他端に第4制御部側接続部392が設けられている。
Further, the second
第2電極接続部群394は、第1リード部38の場合と同様に、第2端子接続部393から第2電極群32に属する複数の電極(第1左側電極321、第2左側電極322、第3左側電極323)に向けて延びるとともに該複数の電極321〜323に接続される複数の電極接続部(第4電極接続部395、第5電極接続部396、第6電極接続部397)からなる。本例では第4電極接続部395、第5電極接続部396、第6電極接続部397はいずれも線状に形成されている。
Similarly to the case of the first
そして、図7(a)〜(c)に示すように、第1リード部38(図6参照)は、第1経路としての第1右側経路L1、第2経路としての第2右側経路L2、第3経路としての第3右側経路L3をそれぞれ形成している。第1右側経路L1は、第1端子451から第1右側電極311に向かって線状に延びて第1右側電極311に接続されている。第2右側経路L2は、第1端子451及び第2端子452から第1端子接続部383を介して第2右側電極312に接続されている。第3右側経路L3は、第2端子452から第1端子接続部383を介して第3右側電極313に接続される。そして、第1リード部38において、各経路L1〜L3はそれぞれの電極311〜313に繋がる最短経路である。
Then, as shown in FIGS. 7A to 7C, the first lead portion 38 (see FIG. 6) includes a first right path L1 as a first path, a second right path L2 as a second path, A third right path L3 as a third path is formed. The first right path L <b> 1 extends linearly from the
第1リード部38における各経路L1〜L3の長さは、これらを平均した平均長さの20%未満であり、好ましくは平均長さの18%未満であり、より好ましくは平均長さの15%未満である。本例では、各経路L1〜L3の長さはそれぞれ、40mm、35mm、31mmであって、これらを平均した平均長さは35.33mmである。そして、各経路L1〜L3の長さと上記平均長さとの差はそれぞれ、4.67mm、0.33mm、4.33mmであって、上記平均長さの13.21%、0.93%、12.26%となっている。
The length of each of the paths L1 to L3 in the
また、図7(a)〜(c)に示すように、第2リード部39(図6参照)は、第1経路としての第1左側経路L4、第2経路としての第2左側経路L5、第3経路としての第3左側経路L6をそれぞれ形成している。第1左側経路L4は、第3端子461から第1左側電極321に向かって線状に延びて第1左側電極321に接続されている。第2左側経路L5は、第3端子461及び第4端子462から第2端子接続部393を介して第2左側電極322に接続されている。第3左側経路L6は、第4端子462から第2端子接続部393を介して第3左側電極323に接続される。そして、第2リード部39において、各経路L4〜L6はそれぞれの電極321〜323に繋がる最短経路である。
Further, as shown in FIGS. 7A to 7C, the second lead 39 (see FIG. 6) includes a first left path L4 as a first path, a second left path L5 as a second path, A third left side path L6 as a third path is formed. The first left path L4 extends linearly from the
第1リード部38と同様に、第2リード部39における各経路L4〜L6の長さは、これらを平均した平均長さの20%未満であり、好ましくは平均長さの18%未満であり、より好ましくは平均長さの15%未満である。本例では、各経路L4〜L6の長さはそれぞれ、40mm、35mm、31mmであって、これらを平均した平均長さは35.33mmである。そして、各経路L4〜L6の長さと上記平均長さとの差はそれぞれ、4.67mm、0.33mm、4.33mmであって、上記平均長さの13.21%、0.93%、12.26%となっている。
Similar to the
リード部としての第1リード部38及び第2リード部39には、シリコンコーティングが施されており、外部と導通できないようになっている。また、各電極311〜313、321〜323において第1リード部38及び第2シード部39に繋がる部分とその近傍領域(図2において、符号Cで示す斜線領域)にも、シリコンコーティングが施されており、外部と導通できないようになっている。これらにより、第1リード部38、第2シード部39及び斜線領域Cにおいて、肌と接触して通電することが防止されている。そして、第1リード部38を介して、第1右側電極311、第2右側電極312及び第3右側電極313が互いに並列接続され、第2リード部39を介して、第1左側電極321、第2左側電極322及び第3左側電極323が互いに並列接続されている。
The
図2に示すように、電極部30は基材33の裏側面33aに形成されている。これにより、電極部30は本体部10と一体的に形成されている。なお、電極部30は基材33に埋め込むように形成することとしてもよい。本例では、電極部30は、銀ペーストを含む導電性インクを基材33の裏側面33aに印刷して形成されている。第1電極群31及び第2電極群32には合わせて4個以上の電極311〜313、321〜323が含まれている。本例では、第1電極群31と第2電極群32とはそれぞれ同数の電極311〜313、321〜323を含んでおり、その数はそれぞれ3個である。すなわち、第1電極群31には、第1右側電極311、第2右側電極312及び第3右側電極313が備えられ、第2電極群32には、第1左側電極321、第2左側電極322及び第3左側電極323が備えられている。そして、基材33において、第1右側電極311、第2右側電極312及び第3右側電極313が形成される部分をそれぞれ、第1右側基部331、第2右側基部332及び第3右側基部333とし、第1左側電極321、第2左側電極322及び第3左側電極323が形成される部分をそれぞれ、第1左側基部341、第2左側基部342及び第3左側基部343とする。
As shown in FIG. 2, the
そして、各電極311〜313、321〜323には、ゲルパッド35(積水化成品工業株式会社製「テクノゲル(登録商標)」、型番SR−RA240/100)が貼付されている。ゲルパッド35は導電性を有しており、各電極311〜313、321〜323はゲルパッド35を介して腹部3(図5参照)への通電が可能となっている。また、ゲルパッド35は高い粘着性を有しており、ゲルパッド35を介して、筋肉電気刺激装置1が腹部3に取り付けられるようになっている。
A gel pad 35 (“Technogel (registered trademark)” manufactured by Sekisui Plastics Co., Ltd., model number SR-RA240 / 100) is attached to each of the
ゲルパッド35は、図2に示すように、各電極311〜313、321〜323よりも一回り大きい形状を有しており、各電極311〜313、321〜323を個別に覆っている。ゲルパッド35は交換可能となっているため、ゲルパッド35が、使用に伴って粘着力が低下したり、破損したり、汚れが目立つようになったりした場合などには、適宜交換することができる。また、所定期間(例えば、1ヶ月、2か月など)ごとに使用済みのゲルパッド35を新品のものと交換することとしてもよい。
As shown in FIG. 2, the
図2に示すように第1右側電極311、第2右側電極312及び第3右側電極313はいずれも、人体2(図5参照)の身長方向Yに平行で本体部10の中心を通る中心線10aよりも右方向X1の第1領域G1に位置するように、本体部10から延出している。そして、第1右側電極311、第2右側電極312及び第3右側電極313は、同一の仮想直線F1上に位置するように配列している。本例では、仮想直線F1は、中心軸10aと平行となっている。
As shown in FIG. 2, the first
一方、第1左側電極321、第2左側電極322及び第3左側電極323は、中心線10aよりも左方向X2の第2領域G2に位置するように、本体部10から延出している。そして、第1左側電極321、第2左側電極322及び第3左側電極323も、同一の仮想直線F2上に位置するように配列している。本例では、仮想直線F2は、中心軸10aと平行となっている。
On the other hand, the first
そして、図2に示すように、第1電極群31と第2電極群32とが、腹部3(図5参照)に取り付けたときに、中心線10aを基準として線対称に位置するように構成されている。すなわち、腹部3に取り付けたときに中心線10aを基準として、第1右側電極311と第1左側電極321とが線対称に位置し、第2右側電極312と第2左側電極322とが線対称に位置し、第3右側電極313と第3左側電極323とが線対称に位置するように構成されている。
As shown in FIG. 2, the
また、図2に示すように、第1電極群31及び第2電極群32は、腹部3(図5参照)に取り付けたときに、身長方向Yにおいて、第1電極群31及び第2電極群32のそれぞれにおける最も上側に位置する第1右側電極311と第1左側電極321とからなる一対の上側電極対301と、最も下側に位置する第3右側電極313と第3左側電極323とからなる一対の下側電極対303と、上側電極対301と下側電極対303との間に位置する一対の第2右側電極312と第2左側電極322とからなる中央電極対302と、が形成されるように構成されている。これにより、上側電極対301、中央電極対302及び下側電極対303は、身長方向Yに沿って上側から下側に向かってこの順で配列している。
In addition, as shown in FIG. 2, the
そして、中央電極対302は、上側電極対301及び下側電極対303よりも本体部10から延設される方向(左右方向X)に突出している。すなわち、腹部3に取り付けたときに、中央電極対302を構成する第2右側電極312は、上側電極対301を構成する第1右側電極311及び下側電極対303を構成する第3右側電極313よりも右方向X1に突出している。同様に、中央電極対302を構成する第2左側電極322は、上側電極対301を構成する第1左側電極321及び下側電極対303を構成する第3左側電極323よりも左方向X2に突出している。
The
また、図2に示すように、上側電極対301は延出方向に向かうほど上側に位置するようにV字状に傾斜している。そして、上述の如く、各電極311〜313、321〜323は同一の大きさとなっている。一方、電極部30の基材33における各右側基部331〜333は各電極311〜313よりも大きくなっており、各左側基部341〜343は、各電極321〜323よりも大きくなっている。
Further, as shown in FIG. 2, the
また、図2に示すように、上側電極対301は、下側電極対303よりも本体部10から延設される方向(左右方向X)に突出している。すなわち、腹部3に取り付けたときに、上側電極対301を構成する第1右側電極311は、下側電極対303を構成する第3右側電極313よりも右方向X1に突出している。同様に、上側電極対301を構成する第1左側電極321は、下側電極対303を構成する第3左側電極323よりも左方向X2に突出している。
Further, as shown in FIG. 2, the
そして、図2に示すように、第1右側基部331の下方外縁部331aは右方向X1に膨出しており、第1左側基部341の下方外縁部341aは左方向X2に膨出している。
また、第2右側基部332の中央外縁部332aは右方向X1に若干膨出しており、第2左側基部342の中央外縁部342aは左方向X2に若干膨出している。
さらに、第3右側基部333の上方外縁部333aは右方向X1に膨出しており、第3右側基部333の下方外縁部333bは下方向(Y方向における下側方向)に膨出している。また、第3左側基部343の上方外縁部343aは左方向X2に膨出しており、第3左側基部343の下方外縁部343bは下方向に膨出している。
As shown in FIG. 2, the lower
Further, the center
Further, the upper
基材33における各基部331〜333、341〜343を上述のようにすることで、図1及び図5に示すように、筋肉電気刺激装置1を正面側から見たとき、筋肉電気刺激装置1が腹部3における腹直筋4を左右方向に包み込むように配される。また、電極配置も腹直筋4の区画4aに併せた配置となる事で、各筋肉を効率よく刺激することが期待できる。さらに、かかる形状であると認識されることにより、腹部3が引き締まって腹筋が割れたイメージを使用者に想起させることができる。これにより、筋肉電気刺激装置1を使用することにより、腹筋が割れて引き締まった腹部3とするためのイメージトレーニングの効果が得られる。(イメージトレーニングによる運動効果の向上は一般によく知られている。)
By making the
また、図2に示すように、第1電極群31及び第2電極群32において互いに隣り合う電極311〜313、321〜323の間には、本体部10に向かって切り込まれた切り込み部17が形成されている。本例では、第1右側電極311と第2右側電極312との間、第2右側電極312と第3右側電極313との間、第3右側電極313と第3左側電極323との間、第3左側電極323と第2左側電極322との間、第2左側電極322と第1左側電極321との間、及び第1左側電極321と第1右側電極311との間、の合計6カ所に切り込み部17が形成されている。さらに、本体部10の周囲には、貫通孔18が4カ所形成されている。本例では、図1に示すように、切り込み部17の先端17aはいずれも、平面視において曲率半径が1.0mmとなっている。
In addition, as shown in FIG. 2, a
次に、本例の筋肉電気刺激装置1の構成について、ブロック図を用いて説明する。
図8に示すように、筋肉電気刺激装置1は、本体部10の内部に、電源部20、制御部40、操作部50を備えるとともに、肌検知部402及び電池電圧検出部406を備える。
Next, the structure of the muscular
As shown in FIG. 8, the electrical
肌検知部402は、電極部30が肌に接しているか否かを検知する。詳細には、肌検知部402は、電極部30に電気的に接続され、第1電極群31と第2電極群32との間の抵抗値を検出する。そして、検出した値と予め設定された閾値とを比較して、検出した値が閾値よりも小さいときに、第1電極群31及び第2電極群32に肌が接していることを検知する。
電池電圧検出部406は、電源部20における電池21の電圧を検知し、検知された電源部20における電池21の電池電圧Vが所定の閾値Vmよりも低いか否か判定する。本例では電池21の公称電圧Vは3.0Vであって、閾値Vmは2.1Vである。
The battery
図8に示すように、電源部20には、電池21が備えられる。また、制御部40には、出力調整部401、電源オフカウンタ403、タイマー404、出力モード切替部405及び出力モード記憶部405aが備えられる。出力調整部401は電極部30における出力電圧(出力レベル)を調整する。本例では、最大出力電圧は40Vであり、出力レベルが1下がるごとに、100%出力電圧が2.0V低下するように設定されている。出力レベルはレベル1からレベル15までの15段階となっている。
As shown in FIG. 8, the
電源オフカウンタ403は、カウント開始信号を受けてからの経過時間を計測する。タイマー404は、出力開始信号を受けてからの経過時間を計測する。出力モード切替部405は、電極部30における出力モードを第1出力モード、第2出力モード及び第3出力モードのいずれかに切り替えるものであって、出力されるバースト波の周波数を設定する周波数設定部を構成している。出力モード記憶部405aには、第1出力モード、第2出力モード及び第3出力モードが記憶されている。第1出力モード、第2出力モード及び第3出力モードには、パルス群出力中断期間R1〜R5を有するバースト波パターンとしての基本波形が予め記憶されており、出力モード記憶部405aがバースト波パターン記憶部を構成している。なお、バースト波パターン記憶部405aは、プログラム上のバースト波の波形の定義記載も含むものとする。
The power-
次に、電極部30における出力モードについて、説明する。
まず、継続時間記憶部としての出力モード記憶部405aには、図9に示す5つのバースト波パターン(基本波形B1〜B5)が記憶されている。各基本波形B1〜B5は、パルス群出力期間Pとパルス群出力中断期間R1〜R5とからなる。すなわち、各基本波形B1〜B5は、共通のパルス群出力期間Pを有しているとともに、パルス群出力中断期間R1〜R5の長さが異なっている。
Next, the output mode in the
First, five burst wave patterns (basic waveforms B1 to B5) shown in FIG. 9 are stored in the output
パルス群出力期間Pは、矩形波パルス信号S1〜S5が出力停止時間N1〜N5を挟んで複数出力される。本例では、5個の矩形波パルス信号S1〜S5が出力される。すなわち、パルス群出力期間Pは、第1の矩形波パルス信号S1、第1の出力停止時間N1、第2の矩形波パルス信号S2、第2の出力停止時間N2、第3の矩形波パルス信号S3、第3の出力停止時間N3、第4の矩形波パルス信号S4、第4の出力停止時間N4、第5の矩形波パルス信号S5、第5の出力停止時間N5の順に実行される。 In the pulse group output period P, a plurality of rectangular wave pulse signals S1 to S5 are output with output stop times N1 to N5 interposed therebetween. In this example, five rectangular wave pulse signals S1 to S5 are output. That is, the pulse group output period P includes the first rectangular wave pulse signal S1, the first output stop time N1, the second rectangular wave pulse signal S2, the second output stop time N2, and the third rectangular wave pulse signal. S3, third output stop time N3, fourth rectangular wave pulse signal S4, fourth output stop time N4, fifth rectangular wave pulse signal S5, and fifth output stop time N5 are executed in this order.
そして、本例では、各矩形波パルス信号S1〜S5のパルス幅、パルス電圧は一定であり、出力停止時間N1〜N5の継続時間も一定である。本例では、各矩形波パルス信号S1〜S5のパルス幅が100μsであって、パルス電圧は100%出力時に±40Vであり、出力停止時間N1〜N5の継続時間は100μsである。そのため、パルス群出力期間Pの継続時間は1msとなっている。そして、各矩形波パルス信号S1〜S5における電圧極性は出力順に交互に変更されている。すなわち、第1の矩形波パルス信号S1、第3の矩形波パルス信号S3及び第5の矩形波パルス信号S5が正の極性を有し、第2の矩形波パルス信号S2及び第4の矩形波パルス信号S4が負の極性を有している。 In this example, the pulse widths and pulse voltages of the rectangular wave pulse signals S1 to S5 are constant, and the durations of the output stop times N1 to N5 are also constant. In this example, the pulse width of each of the rectangular wave pulse signals S1 to S5 is 100 μs, the pulse voltage is ± 40 V at 100% output, and the duration of the output stop time N1 to N5 is 100 μs. Therefore, the duration of the pulse group output period P is 1 ms. And the voltage polarity in each rectangular wave pulse signal S1-S5 is changed alternately by the order of output. That is, the first rectangular wave pulse signal S1, the third rectangular wave pulse signal S3, and the fifth rectangular wave pulse signal S5 have a positive polarity, and the second rectangular wave pulse signal S2 and the fourth rectangular wave. The pulse signal S4 has a negative polarity.
上述のように、パルス群出力期間Pにおける各矩形波パルス信号S1〜S5のパルス幅及び各出力停止時間N1〜N5の継続時間はそれぞれ100μsである。そのため、パルス群出力期間Pにおける各矩形波パルス信号S1〜S5のパルス周期は200μsであって、十分短い。そのため、使用者はこれらの矩形波パルス信号S1〜S5を一つの電気刺激として認識することとなる。なお、パルス群出力期間Pにおける各矩形波パルス信号S1〜S5の周波数は5,000Hzである。 As described above, the pulse width of each rectangular wave pulse signal S1 to S5 and the duration of each output stop time N1 to N5 in the pulse group output period P are 100 μs. Therefore, the pulse period of each rectangular wave pulse signal S1 to S5 in the pulse group output period P is 200 μs, which is sufficiently short. Therefore, the user recognizes these rectangular wave pulse signals S1 to S5 as one electrical stimulus. In addition, the frequency of each rectangular wave pulse signal S1-S5 in the pulse group output period P is 5,000 Hz.
各基本波形B1〜B5において、パルス群出力中断期間R1〜R5はパルス信号を出力しない。そして、パルス群出力中断期間R1〜R5の継続時間は、パルス群出力期間Pの継続時間よりも長い。本例では、図9に示すように、パルス群出力期間Pの継続時間は、1msであり、パルス群出力中断期間R1〜R5の継続時間は、それぞれ、499ms、249ms、124ms、61.5ms、49msである。このように、パルス群出力中断期間R1〜R5は、パルス群出力期間Pにおける出力停止時間に比べて、非常に長い継続時間を有するものである。 In each of the basic waveforms B1 to B5, no pulse signal is output during the pulse group output interruption periods R1 to R5. The duration of the pulse group output interruption period R1 to R5 is longer than the duration of the pulse group output period P. In this example, as shown in FIG. 9, the duration of the pulse group output period P is 1 ms, and the durations of the pulse group output interruption periods R1 to R5 are 499 ms, 249 ms, 124 ms, 61.5 ms, respectively. 49 ms. Thus, the pulse group output interruption periods R1 to R5 have a very long duration compared to the output stop time in the pulse group output period P.
したがって、図9に示すように、第1バースト波(2Hz)は、1msのパルス群出力期間Pと、499msのパルス群出力中断期間R1とからなる。すなわち、第1バースト波(2Hz)は、パルス群出力期間Pが2Hzの周波数で出力されるものである。
また、第2バースト波(4Hz)は、1msのパルス群出力期間Pと、249msのパルス群出力中断期間R2とからなる。すなわち、第2バースト波(4Hz)は、パルス群出力期間Pが4Hzの周波数で出力されるものである。
また、第3バースト波(8Hz)は、1msのパルス群出力期間Pと、124msのパルス群出力中断期間R3とからなる。すなわち、第3バースト波(8Hz)は、パルス群出力期間Pが8Hzの周波数で出力されるものである。
また、第4バースト波(16Hz)は、1msのパルス群出力期間Pと、61.5msのパルス群出力中断期間R4とからなる。すなわち、第4バースト波(16Hz)は、パルス群出力期間Pが16Hzの周波数で出力されるものである。
また、第5バースト波(20Hz)は、1msのパルス群出力期間Pと、49msのパルス群出力中断期間R5とからなる。すなわち、第5バースト波(20Hz)は、パルス群出力期間Pが20Hzの周波数で出力されるものである。
Therefore, as shown in FIG. 9, the first burst wave (2 Hz) is composed of a pulse group output period P of 1 ms and a pulse group output interruption period R1 of 499 ms. That is, the first burst wave (2 Hz) is output with a frequency of the pulse group output period P of 2 Hz.
The second burst wave (4 Hz) includes a pulse group output period P of 1 ms and a pulse group output interruption period R2 of 249 ms. That is, the second burst wave (4 Hz) is output at a frequency of 4 Hz in the pulse group output period P.
The third burst wave (8 Hz) includes a pulse group output period P of 1 ms and a pulse group output interruption period R3 of 124 ms. That is, the third burst wave (8 Hz) is output at a frequency of 8 Hz in the pulse group output period P.
The fourth burst wave (16 Hz) includes a pulse group output period P of 1 ms and a pulse group output interruption period R4 of 61.5 ms. That is, the fourth burst wave (16 Hz) is output at a frequency of 16 Hz in the pulse group output period P.
The fifth burst wave (20 Hz) includes a pulse group output period P of 1 ms and a pulse group output interruption period R5 of 49 ms. That is, the fifth burst wave (20 Hz) is output with a frequency of 20 Hz in the pulse group output period P.
そして、基本波形B1〜B5を所定の組み合わせで所定期間繰り返し出力することにより、図10(a)〜(e)に示すように、所定のバースト波が出力されることとなる。そして、上述のように、使用者は、パルス群出力期間Pにおける複数の矩形波パルス信号S1〜S5を一つの電気刺激と認識することから、図10(a)に示すように、基本波形B1を繰り返す第1バースト波では、周波数2Hzの電気刺激が出力されることとなる。同様に、基本波形B2を繰り返す第2バースト波では、周波数4Hzの電気刺激が出力され、基本波形B3を繰り返す第3バースト波では、周波数8Hzの電気刺激が出力され、基本波形B4を繰り返す第4バースト波では、周波数16Hzの電気刺激が出力され、基本波形B5を繰り返す第5バースト波では、周波数20Hzの電気刺激が出力されることとなる。 Then, by repeatedly outputting the basic waveforms B1 to B5 in a predetermined combination for a predetermined period, as shown in FIGS. 10A to 10E, a predetermined burst wave is output. As described above, since the user recognizes the plurality of rectangular wave pulse signals S1 to S5 in the pulse group output period P as one electrical stimulus, as shown in FIG. In the first burst wave repeating the above, an electrical stimulus having a frequency of 2 Hz is output. Similarly, in the second burst wave that repeats the basic waveform B2, an electrical stimulus with a frequency of 4 Hz is output, and in the third burst wave that repeats the basic waveform B3, an electrical stimulus with a frequency of 8 Hz is output, and the fourth burst repeats the basic waveform B4. In the burst wave, an electrical stimulus with a frequency of 16 Hz is output, and in the fifth burst wave that repeats the basic waveform B5, an electrical stimulus with a frequency of 20 Hz is output.
そして、継続時間記憶部としての出力モード記憶部405aに記憶された第1〜第3出力モードは、出力モード記憶部405aに記憶された基本波形B1〜B5を適宜選択することにより、所定の周波数のバースト波を組み合わせて構成される。まず、表1に示すように、第1出力モードは、下記の第1ステータス〜第4ステータスを順に行うように構成されたウォームアップモードである。各ステータスの条件は以下のとおりである。
(1)第1ステータスでは、第1バースト波(2Hz)で20秒間、100%の出力を行う。なお、図11に示すように、第1ステータスにおける開始5秒間は出力電圧を0%から徐々に大きくして100%にする、いわゆるソフトスタートを行う。
(2)第2ステータスでは、第2バースト波(4Hz)で20秒間、100%の出力を行う。
(3)第3ステータスでは、第3バースト波(8Hz)で10秒間、100%の出力を行う。
(4)第4ステータスでは、第4バースト波(16Hz)で10秒間、100%の出力を行う。
そして、第1出力モードの継続期間(すなわち、第1ステータス〜第4ステータスの継続期間の合計)は1分間である。かかる第1出力モードでは、バースト波の周波数が2Hzから16Hzへ段階的に高くなるように構成されているため、第1出力モードをウォームアップモードと呼んでいる。
(1) In the first status, 100% output is performed with the first burst wave (2 Hz) for 20 seconds. As shown in FIG. 11, so-called soft start is performed in which the output voltage is gradually increased from 0% to 100% for the first 5 seconds in the first status.
(2) In the second status, 100% output is performed for 20 seconds with the second burst wave (4 Hz).
(3) In the third status, 100% output is performed with the third burst wave (8 Hz) for 10 seconds.
(4) In the fourth status, 100% output is performed for 10 seconds with the fourth burst wave (16 Hz).
The duration of the first output mode (that is, the total duration of the first status to the fourth status) is 1 minute. In the first output mode, since the burst wave frequency is configured to increase stepwise from 2 Hz to 16 Hz, the first output mode is called a warm-up mode.
かかるウォームアップモードとしての第1出力モードでは、バースト波の周波数が2Hzから16Hzへ段階的に高くなるのに伴って筋肉の運動頻度が高まり、当該筋肉や体が次第に温まる。これにより、急激な血圧上昇、当該筋肉における一時的な酸素不足などが生じることが防止される。また、当該筋肉が徐々に温まることにより、血流量が増して当該筋肉の柔軟性が高まる。これにより、後続のトレーニングモードにおいて、筋肉の刺激による効果が一層得られやすくなる。また、トレーニングモードに先行して当該ウォームアップモードを行うことによって、使用者が刺激に適度に慣れることができるため、体感が向上する。 In the first output mode as the warm-up mode, the frequency of muscle movement increases as the burst wave frequency increases stepwise from 2 Hz to 16 Hz, and the muscle and body gradually warm up. This prevents a sudden rise in blood pressure, temporary oxygen shortage in the muscle, and the like. Moreover, when the muscles are gradually warmed, the blood flow is increased and the flexibility of the muscles is increased. Thereby, in the subsequent training mode, it becomes easier to obtain the effect of muscle stimulation. Also, by performing the warm-up mode prior to the training mode, the user can be used to the stimulation moderately, so that the sensation is improved.
次に、表2に示すように、第2出力モードは、下記の第1ステータス〜第4ステータスを順に行うように構成されたトレーニングモードである。各ステータスの条件は以下のとおりである。
(1)第1ステータスでは、第5バースト波(20Hz)で3秒間、100%の出力を行った後、出力なしを2秒間維持する。これを5分間繰り返す。
(2)第2ステータスでは、第5バースト波(20Hz)で3秒間、100%の出力を行った後、第2バースト波(4Hz)で2秒間、100%の出力を行う。これを5分間繰り返す。
(3)第3ステータスでは、第5バースト波(20Hz)で4秒間、100%の出力を行った後、第2バースト波(4Hz)で2秒間、100%の出力を行う。これを5分間繰り返す。
(4)第4ステータスでは、第5バースト波(20Hz)で5秒間、100%の出力を行った後、第2バースト波(4Hz)で2秒間、100%の出力を行う。これを5分間繰り返す。
なお、図11に示すように、第2出力モードでは第1ステータス〜第4ステータスにおけるそれぞれの開始5秒間は、出力電圧を0%から徐々に大きくして100%にする、いわゆるソフトスタートを行う。
そして、第2出力モードの継続期間は20分間である。かかる第2出力モードでは、周波数20Hzの第5バースト波を所定期間維持した後、出力なし又は周波数4Hzの第2バースト波を所定期間維持するため、筋肉を効果的に刺激するのに優れている。そのため、第2出力モードをトレーニングモードと呼んでいる。
(1) In the first status, 100% output is performed for 3 seconds with the fifth burst wave (20 Hz), and then no output is maintained for 2 seconds. Repeat for 5 minutes.
(2) In the second status, 100% output is performed with the fifth burst wave (20 Hz) for 3 seconds, and then 100% output is performed with the second burst wave (4 Hz) for 2 seconds. Repeat for 5 minutes.
(3) In the third status, 100% output is performed with the fifth burst wave (20 Hz) for 4 seconds, and then 100% output is performed with the second burst wave (4 Hz) for 2 seconds. Repeat for 5 minutes.
(4) In the fourth status, 100% output is performed with the fifth burst wave (20 Hz) for 5 seconds, and then 100% output is performed with the second burst wave (4 Hz) for 2 seconds. Repeat for 5 minutes.
As shown in FIG. 11, in the second output mode, so-called soft start is performed in which the output voltage is gradually increased from 0% to 100% for the first 5 seconds in the first status to the fourth status. .
The duration of the second output mode is 20 minutes. In the second output mode, the fifth burst wave with a frequency of 20 Hz is maintained for a predetermined period, and then no output or the second burst wave with a frequency of 4 Hz is maintained for a predetermined period, so that it is excellent for stimulating muscles effectively. . Therefore, the second output mode is called a training mode.
次に、表3に示すように、第3出力モードは、下記の第1ステータス〜第4ステータスを順に行うように構成されたクールダウンモードである。各ステータスの条件は以下のとおりである。
(1)第1ステータスでは、第4バースト波(16Hz)で10秒間、出力を行う。
(2)第2ステータスでは、第3バースト波(8Hz)で10秒間、出力を行う。
(3)第3ステータスでは、第2バースト波(4Hz)で20秒間、出力を行う。
(4)第4ステータスでは、第1バースト波(2Hz)で20秒間、出力を行う。
なお、第3出力モードでは、各ステータスにおける出力は、図11に示すように、第1ステータス開始時には100%とし、第4ステータス終了時に50%となるように徐々に減少させる。
そして、第3出力モードの継続期間は1分間である。かかる第3出力モードでは、バースト波の周波数が16Hzから2Hzへ段階的に低くなるように構成されているため、第3出力モードをクールダウンモードと呼んでいる。
(1) In the first status, the fourth burst wave (16 Hz) is output for 10 seconds.
(2) In the second status, the third burst wave (8 Hz) is output for 10 seconds.
(3) In the third status, the second burst wave (4 Hz) is output for 20 seconds.
(4) In the fourth status, the first burst wave (2 Hz) is output for 20 seconds.
In the third output mode, as shown in FIG. 11, the output in each status is gradually reduced to 100% at the start of the first status and 50% at the end of the fourth status.
The duration of the third output mode is 1 minute. In the third output mode, the burst wave frequency is configured to gradually decrease from 16 Hz to 2 Hz. Therefore, the third output mode is called a cool-down mode.
かかるクールダウンモードとしての第3出力モードでは、バースト波の周波数が16Hzから2Hzへ段階的に低くなるのに伴って筋肉の運動頻度が低下することにより、当該温まっていた筋肉や体が徐々に冷まされることとなる。そして、先行するトレーニングモードにおいて筋肉に生じた疲労物質を当該筋肉から積極的に排出して、当該筋肉に疲労物質が過剰に残留することが防止される。 In the third output mode as the cool-down mode, the muscles and body that have been warmed up gradually as the frequency of the muscles decreases as the frequency of the burst wave gradually decreases from 16 Hz to 2 Hz. It will be cooled. Then, the fatigue substance generated in the muscle in the preceding training mode is positively discharged from the muscle, and the fatigue substance is prevented from remaining excessively in the muscle.
以上のように、第1出力モード(ウォームアップモード)、第2出力モード(トレーニングモード)及び第3出力モード(クールダウンモード)を連続して行った場合の合計時間は22分間となる。なお、本例では、図11に示すように、第1出力モードと第2出力モードとの間、及び第2出力モードにおける各ステータスの間の合計4カ所に、それぞれ2秒間の休止期間が設けられている。そのため、当該休止期間を含めた全行程の合計時間は22分8秒間となっている。 As described above, the total time when the first output mode (warm-up mode), the second output mode (training mode), and the third output mode (cool-down mode) are continuously performed is 22 minutes. In this example, as shown in FIG. 11, a rest period of 2 seconds is provided at a total of four locations between the first output mode and the second output mode and between each status in the second output mode. It has been. Therefore, the total time of all the processes including the suspension period is 22 minutes and 8 seconds.
次に、本例の筋肉電気刺激装置1における使用態様について、以下に詳述する。
図12に示すメイン動作フローS100について説明する。メイン動作フローS100では、まず、操作面54の「+」を2秒間押下する(S101)。これにより、筋肉電気刺激装置1の電源がオンとなって、筋肉電気刺激装置1が起動されるとともに、起動されたことを通知する通知音(「ピー」)が、スピーカ43により発せられる(S102)。その後、筋肉電気刺激装置1は、出力待機状態となり出力レベルが0にされるとともに、操作部50の入力が無効化される(S103)
Next, the usage mode in the electrical
The main operation flow S100 shown in FIG. 12 will be described. In the main operation flow S100, first, “+” on the
次に、肌検知部402により、電極部30に肌が接しているか否かを検知する(S104)。肌検知部402によって、電極部30に肌が接していることが検知された場合(S104のYes)は、操作部50を有効化する(S105)。そして、操作部50により出力レベルを入力する(S106)。出力レベルの入力は、操作部50の操作面54から行う。操作部50の操作面54の「+」を押すごとに出力レベルが1レベル大きくなり、操作面54の「−」を押すごとに出力レベルが1レベル小さくなる。出力レベルが設定されると、制御部40からタイマー404へ出力開始信号を送り、タイマー404において計測が開始される(S107)。また、出力レベルの操作は使用時間中(操作部50の有効化後から電源オフまで)のいつでも可能である。
Next, it is detected by the
タイマー404の計測開始時(経過時間0)から経過時間1分までの間は、電極部30における出力モードを第1出力モード(ウォームアップモード)とする(S108)。経過時間1分に達すると、周波数設定部としての出力モード切替部405により、電極部30における出力モードを第2出力モード(トレーニングモード)に切り替え、経過時間21分までの20分間維持する(S109)。経過時間21分に達すると、周波数設定部としての出力モード切替部405により、電極部30における出力モードを第3出力モード(クールダウンモード)に切り替え、経過時間22分までの1分間維持する(S110)。経過時間22分に達すると、タイマー404における計測を終了する(S111)。そして、筋肉電気刺激装置1を停止する(S112)。このように、S108からS111が行われることにより、第1出力モード(ウォームアップモード)、第2出力モード(トレーニングモード)及び第3出力モード(クールダウンモード)が1セット行われて、終了することとなる。
From the time when the
一方、肌検知部402によって、電極部30に肌が接していないと判定された場合(S104のNo)は、その旨を通知する通知音(「ピ、ピ、ピ」)が、スピーカ43により発せられる(S113)。そして、制御部40から電源オフカウンタ403へカウント開始信号を送り、電源オフカウンタ403において経過時間の計測をスタートする(S114)。
On the other hand, if the
次に肌検知部402により、電極部30に肌が接しているか否かを検知する(S115)。肌検知部402によって、電極部30に肌が接していることが検知された場合は、上述のステップS103に戻って、出力待機状態となる(S115のYes)。一方、肌検知部402によって、電極部30に肌が接していないと判定された場合(S115のNo)は、電源オフカウンタ403における経過時間が2分を超えたか否かを判定する(S116)。電源オフカウンタ403における経過時間が2分を超えていないと判定された場合(S116のNo)は、再度S115に戻り、肌検知部402により、電極部30に肌が接しているか否かを検知する。一方、S116において、電源オフカウンタ403における経過時間が2分を超えていると判定された場合(S116のYes)は、筋肉電気刺激装置1の電源がオフとなる(S117)。
Next, the
次に、上述のメイン動作フローS100におけるS105〜S110の間に割り込んで優先処理される割り込み処理について説明する。図13に示すように、第1の割り込み処理として、肌検出割り込み処理S200が行われる。肌検出割り込み処理S200は、使用途中で電極が人体から離脱した場合に、自動的に電源をオフにする機能として用いられる。肌検出割り込み処理S200では、まず、肌検知部402により、電極部30に肌が接しているか否かを検知する(S201)。肌検知部402によって、電極部30に肌が接していることが検知された場合(S201のYes)は、メイン動作フローS100における元のフローへ戻る。一方、肌検知部402によって、電極部30に肌が接していないと判定された場合(S201のNo)は、その旨を通知する通知音(「ピ、ピ、ピ」)が、スピーカ43により発せられる(S202)。そして、制御部40から電源オフカウンタ403へカウント開始信号を送り、電源オフカウンタ403が経過時間の計測をスタートする(S203)。
Next, a description will be given of an interrupt process that is preferentially interrupted between S105 and S110 in the main operation flow S100 described above. As shown in FIG. 13, a skin detection interrupt process S200 is performed as the first interrupt process. The skin detection interrupt process S200 is used as a function of automatically turning off the power when the electrode is detached from the human body during use. In the skin detection interruption process S200, first, the
次に肌検知部402により、電極部30に肌が接しているか否かを検知する(S204)。肌検知部402によって、電極部30に肌が接していることが検知された場合は、メイン動作フローS100のステップS103に戻る(S204のYes)。一方、肌検知部402によって、電極部30に肌が接していないと判定された場合(S204のNo)は、電源オフカウンタ403における経過時間が2分を超えたか否かを判定する(S205)。電源オフカウンタ403における経過時間が2分を超えていないと判定された場合(S205のNo)は、再度S204に戻り、肌検知部402により、電極部30に肌が接しているか否かを検知する。一方、S205において、電源オフカウンタ403における経過時間が2分を超えていると判定された場合(S205のYes)は、筋肉電気刺激装置1の電源がオフとなる(S206)。
Next, the
次に、図14に示すように、上述のメイン動作フローS100におけるS105〜S110の間に割り込んで優先処理される第2の割り込み処理である電池電圧低下処理S300について説明する。電池電圧低下処理S300は、電池21の電池電圧が低下した場合に自動で電源をオフにする機能である。これにより、使用者は電池交換の対応が必要な場合等にこれを容易に知ることができる。まず、電池電圧検出部406により、検知された電源部20における電池21の電池電圧Vが所定の閾値Vmよりも低いか否か判定する(S301)。電池電圧Vが所定の閾値Vmよりも低くないと判定された場合(S301のNo)は、メイン動作フローS100における元のフローへ戻る。一方、電池電圧Vが所定の閾値Vmよりも低いと判定された場合は、その旨を通知する通知音(「ピ、ピ、ピ」)が、スピーカ43により発せられる(S302)。そして、制御部40から電源オフカウンタ403へカウント開始信号を送り、電源オフカウンタ403において経過時間の計測をスタートする(S303)。
Next, as shown in FIG. 14, a battery voltage lowering process S300, which is a second interrupt process interrupted between S105 to S110 in the main operation flow S100 described above, will be described. The battery voltage lowering process S300 is a function for automatically turning off the power when the battery voltage of the
次に、電源オフカウンタ403における経過時間が2分を超えたか否かを判定する(S304)。電源オフカウンタ403における経過時間が2分を超えていないと判定された場合(S304のNo)は、再度S304に戻る。電源オフカウンタ403における経過時間が2分を超えていると判定された場合(S304のYes)は、筋肉電気刺激装置1の電源がオフとなる(S305)。
Next, it is determined whether or not the elapsed time in the power-
次に、図15に示すように、上述のメイン動作フローS100におけるS105〜S110の間に割り込んで優先処理される第3の割り込み処理である中断処理S400について説明する。まず、制御部50により、操作部50における操作面54の「−」ボタンを押下している時間が2秒以上か否か判定する(S401)。「−」ボタンを押下している時間が2秒以上でないと判定された場合(S401のNo)は、メイン動作フローS100における元のフローへ戻る。一方、「−」ボタンを押下している時間が2秒以上であると判定された場合(S401のYes)は、筋肉電気刺激装置1の電源をオフにして終了する旨を通知する通知音(「ピー」)が、スピーカ43により発せられる(S402)。そして、電源をオフにする(S403)。
Next, as shown in FIG. 15, an interruption process S400, which is a third interruption process interrupted between S105 and S110 in the main operation flow S100 described above, will be described. First, the
本例の筋肉電気刺激装置1の作用効果について、以下に詳述する。
上記筋肉電気刺激装置1では、複数の電極311〜313(321〜323)のそれぞれから端子451、452(461、462)までの最短経路L1〜L3(L4〜L6)の長さはそれぞれ、最短経路L1〜L3(L4〜L6)の平均長さとの差が、該平均長さの20%未満となっている。そのため、電極311〜313(321〜323)と制御部40との通電距離にばらつきが生じにくく、電極311〜313(321〜323)と制御部40とを電気的に接続するリード部38(39)における電気抵抗の電極ごとのばらつきを低減できる。そのため、各電極311〜313(321〜323)から出力される電気刺激がばらつきにくくなり、筋肉にバランス良く電気刺激を付与することができる。
The effects of the electrical
In the muscular
また、制御部40には同一極性の電圧が印加される複数の端子451、452(461、462)が備えられている。そして、リード部38(39)には、当該複数の端子451、452(461、462)に接続される端子接続部383(393)と、端子接続部383(393)と電極311〜313(321〜323)とを接続する電極接続部385〜387(395〜397)とが設けられている。これにより、リード部38(39)を介した最短経路L1〜L3(L4〜L6)を短く維持しつつ、電極311〜313(321〜323)の配置の自由度を高めることができる。その結果、電極311〜313(321〜323)を筋肉に電気刺激を付与するのに適した位置に配置しやすくなる。
The
また、本例では、複数の電極311〜313(321〜323)は、同一の仮想直線F1(F2)上に位置するように配置されている。これにより、腹直筋4のように、直線上に配列した複数の区画4aのそれぞれに電極311〜313(321〜323)を対応させやすくなるため、腹直筋4等の筋肉を効果的に刺激することができる。
In the present example, the plurality of
また、本例では、同一極性の端子451、452(461、462)が、2個備えられている。これにより、少ない構成で各電極311〜313(321〜323)との最短経路L1〜L3(L4〜L6)を短くしつつ、製造コストの低減を図ることができる。
In this example, two
また、本例では、電極部30の第1電極群31は3個の電極311〜313を有し、第2電極群32は3個の電極321〜323を有する。これにより、腹直筋4が身長方向Yに区画された3つの区画4aに、電極311〜313を対応させることができるため、腹直筋4を一層効果的に刺激することができる。
In this example, the
また、本例では、複数の端子451、452、461、462、電極311〜312、321〜323及びリード部38、39はそれぞれ、本体部10の中心を通る中心線10cにより二分された一方の領域(第1領域G1)と他方の領域(第2領域G2)の両方にそれぞれ配置されている。そして、一方の領域(第1領域G1)に配置される電極311〜312と他方の領域(第2領域G2)に配置される電極321〜323とは、互いに異なる極性の電圧が印加されるように構成されている。これにより、中心軸10aが人2の身長方向Yと平行となるようにして腹部3の真ん中に取り付けることにより、各電極311〜312、321〜323が左右の腹直筋4にそれぞれ対応する位置に位置しやすくなるため、腹直筋4を刺激するのに適した筋肉電気刺激装置1となる。
Further, in this example, the plurality of
また、本例では、端子接続部(第1端子接続部383及び第2端子接続部393)は、本体部10の外縁10bに沿って形成されている。これにより、リード部(第1リード部38及び第2リード部39)を短く形成しやすいため、効率的に電気刺激を出力することができる。
In this example, the terminal connection portions (the first
なお、本例では、複数の制御部側接続部381、382、391、392と制御部40とは、ねじ115を介して締結固定したが、これに替えて、複数の制御部側接続部381、382、391、392を第1ケース111と第2ケース112とで挟んで制御部40に接続されるように固定してもよい。
In this example, the plurality of control unit
また、電池21はボタン電池又はコイン電池とすることができ、本例では、コイン電池である。これにより、電池21が小型となるため、筋肉電気刺激装置1の小型化に寄与する。そして、筋肉電気刺激装置1の小型化に伴って軽量化を図ることができるため、電極部30が使用者の体から剥離、脱落しにくくなり、使い勝手が向上するとともに、携帯性も向上する。さらに、電池21は薄型でもあるため、筋肉電気刺激装置1の薄型化にも寄与する。そして、筋肉電気刺激装置1が薄型となることにより、使用者は、筋肉電気刺激装置1を取り付けたまま、その上から衣服を着用することが可能となる。そのため、筋肉電気刺激装置1を通勤中や通学中、家事や仕事等の作業中、その他様々な状況で使用することができる。また、ボタン電池及びコイン電池は、他の乾電池等に比べて、高い作動電圧で安定した放電特性を有するため、比較的長時間にわたって筋肉電気刺激装置1を安定して動作させることができる。
The
また、電池21として公称電圧が3.0〜5.0Vのものを採用することができ、本例では、3.0Vの電池21を採用している。筋肉電気刺激装置1に備えられる電子部品42、スピーカ43等の駆動電圧が一致していることから、これらの電子部品42、43の駆動のために降圧回路や昇圧回路を別途備える必要がない。これにより、小型化に寄与できる。
In addition, a battery having a nominal voltage of 3.0 to 5.0 V can be used as the
また、上記電源部20には、上述の交換可能な電池21に替えて充電可能な電池が内蔵されていてもよい。かかる電池の充電手段として、外部電源と接続可能な給電用の端子を備えていてもよいし、電磁誘導を使用した非接触型の給電部を備えていてもよい。この場合には、当該電池を繰り返し使用できるため、非充電型の電池を使用する場合に比べて、消耗品を削減できる。
The
なお、本例では、電極部30が形成される基材33は、本体部10から延設されるとともに、外殻形成体12から延設された電極支持部121が接着されることにより、電極部30と本体部10とが一体的に形成されることとした。これに替えて、基材33と本体部10とを別体とするとともに、電極支持部121と外殻形成体12とを別体として形成することにより、本体部10と電極部30と非使用時において互いに分離可能なように構成してもよい。この場合には、電極部30を本体部10から分離して、他の形態の電極部と交換することができる。また、電極部30は電子部品を有さないため、分離することにより、電極部30を容易に洗浄することができる。
In this example, the
以上のように、本例によれば、各電極311〜323から出力される電気刺激のばらつきが低減されるとともに、電極311〜323の配置の自由度が向上される筋肉電気刺激装置1を提供することができる。
As described above, according to this example, it is possible to provide the muscular
また、本例では、第2出力モード(トレーニングモード)は、上述の表2に示す第1ステータス〜第4ステータスに基づいて実行した。これに替えて、次に示す変形例1のように、本例と同等の第1ステータス〜第4ステータスにおいて、第2ステータスと第3ステータスの間に、表4に示す第2aステータスを実行し、第3ステータスと第4ステータスとの間に、表4に示す第3aステータスを実行することとしてもよい。
変形例1では、表4に示すように、第2aステータス及びは第3aステータスは以下の通り行う。
(2a)第2aステータスでは、第2バースト波(4Hz)で10秒間、100%の出力を行った後、第3バースト波(8Hz)で10秒間、100%の出力を行い、さらにその後、第4バースト波(16Hz)で10秒間、100%の出力を行う。
(3a)第3aステータスでは、第2バースト波(4Hz)で10秒間、100%の出力を行った後、第3バースト波(8Hz)で10秒間、100%の出力を行い、さらにその後、第4バースト波(16Hz)で10秒間、100%の出力を行う。
なお、当該変形例1では、本例の第2出力モード(表2参照)に比べて第2aステータス及び第3aステータスが追加されているため、表4に示す第1出力モード(ウォームアップモード)、第2出力モード(トレーニングモード)及び第3出力モード(クールダウンモード)を連続して行った場合の合計時間は23分間となる。
In the first modification, as shown in Table 4, the 2a status and the 3a status are performed as follows.
(2a) In the 2a status, after the second burst wave (4 Hz) is output for 100 seconds for 10 seconds, the third burst wave (8 Hz) is output for 100 seconds for 10 seconds. 100% output is performed for 10 seconds with 4 burst waves (16 Hz).
(3a) In the 3a status, after the second burst wave (4 Hz) is output for 100 seconds for 10 seconds, the third burst wave (8 Hz) is output for 100 seconds for 10 seconds. 100% output is performed for 10 seconds with 4 burst waves (16 Hz).
In the first modification, since the 2a status and the 3a status are added as compared with the second output mode (see Table 2) of the present example, the first output mode (warm-up mode) shown in Table 4 is added. The total time when the second output mode (training mode) and the third output mode (cool down mode) are continuously performed is 23 minutes.
第2aステータスでは、バースト波の周波数が4Hzから16Hzへ段階的に高くなるように構成されているため、第2aステータスから第3ステータスへ切り替え時の周波数変化が滑らかとなる。同様に、第3aステータスから第4ステータスへ切り替え時の周波数変化が滑らかとなる。そして、当該変形例1では、実施例1の場合に対して、第2aステータス及び第3aステータスが加わることにより、第2出力モード(トレーニングモード)における電気刺激のパターンが大きく変化することとなる。その結果、使用者における当該電気刺激への慣れによる体感の低下を防止することができ、より効果的に腹直筋を刺激することができる。また、第2aステータス・第3aステータスを設けることもより、電気刺激の付与によって疲労した筋肉における疲労物質を押し流す効果も奏する。なお、第2出力モード(トレーニングモード)をこのように設定した当該変形例1において、実施例1と同等の作用効果も奏する。
In the 2a status, since the frequency of the burst wave is increased stepwise from 4 Hz to 16 Hz, the frequency change at the time of switching from the 2a status to the 3rd status becomes smooth. Similarly, the frequency change at the time of switching from the 3a status to the 4th status becomes smooth. And in the said
なお、実施例1では、バースト波の周波数を変更する際には、周波数設定部(出力モード切替部405)がバースト波パターン記憶部(出力モード記憶部405a)に記憶されたバースト波パターンから所定のものを選択するようにしている。これに替えて、次の変形例2のようにすることもできる。変形例2では、図16に示すように、バースト波の周波数を選択する周波数選択部としての操作面54aと、中断期間継続時間算出部405bと、中断期間継続時間設定部405cと、を有する。
そして、中断期間継続時間算出部405bは、周波数選択部(操作面54a)により選択された周波数に基づいてパルス群出力中断期間の継続時間を算出する。
中断期間継続時間設定部405cは、中断期間継続時間算出部405bによって算出された上記継続時間に基づいて上記パルス群出力中断期間の継続時間を設定する。
なお、変形例2において実施例1と同等の構成要素には同一の符号を付してその説明を省略する。
In the first embodiment, when the frequency of the burst wave is changed, the frequency setting unit (output mode switching unit 405) is predetermined from the burst wave pattern stored in the burst wave pattern storage unit (output
Then, the interruption period
The interruption period duration setting unit 405c sets the duration of the pulse group output interruption period based on the duration calculated by the interruption period
In the second modification, the same components as those in the first embodiment are denoted by the same reference numerals, and the description thereof is omitted.
かかる変形例2によれば、周波数選択部(操作面54a)によってバースト波の周波数を所望の周波数に設定することができるため、使用者の好み(収縮の強度・収縮と弛緩の間隔)に基づいて、バースト波の周波数を適宜設定することにより、使用者ごとに、一層効率的に筋肉を刺激することができる筋肉電気刺激装置1となる。なお、当該変形例2においても、バースト波の周波数の変更態様に関する作用効果を除いて、実施例1と同等の作用効果を奏する。
According to the second modification, since the frequency of the burst wave can be set to a desired frequency by the frequency selection unit (
(実施例2)
実施例1では、6個の電極311〜313、321〜323を備えることとしたが、本実施例2では、図17に示すように、8個の電極311〜314、321〜324を備える。本例において、実施例1と同等の要素には同一の符号を付して、その説明を省略する。
(Example 2)
In the first embodiment, six
本例では、図17に示すように、第1電極群31には、第3右側電極313よりも本体部10に近く、第2右側電極312よりも遠い位置であって、第2右側電極312と第3右側電極313との間に位置し、第1右側電極311、第2右側電極312及び第3右側電極313とともに円弧状又は線状に並んだ第4右側電極314が含まれている。
第2電極群32には、第3左側電極323よりも本体部10に近く、第2左側電極322よりも本体部10から遠い位置であって、第2左側電極322と第3左側電極323との間に位置し、第1左側電極321、第2左側電極322及び第3左側電極323とともに円弧状又は線状に並んだ第4左側電極324が含まれている。
In the present example, as shown in FIG. 17, the
The
そして、第1リード部38は、第1端子451及び第2端子452から第1端子接続部383を介して第4右側電極314に接続されるとともに第1右側経路L1と略同じ長さを有する右側経路L7を有する。したがって、第4右側経路L7の長さも、最短経路の平均長さとの差が、当該平均長さの20%未満となっている。
また、第2リード部39は、第3端子461及び第4端子462から第2端子接続部393を介して第4左側電極324に接続されるとともに第1左側経路L4と略同じ長さを有する第4左側経路L8を有する。したがって、第4左側経路L8の長さも、最短経路の平均長さとの差が、当該平均長さの20%未満となっている。
本例の場合も、実施例1の場合と同等の作用効果を奏する
The
The
In the case of this example, the same effect as in the case of Example 1 is achieved.
また、本例では、電極部30のおける第1電極群31及び第2電極群32は、それぞれ、電極311〜314、321〜324を4個有している。これにより、腹直筋4が長手方向(身長方向Y)に4つに区画されている場合に、当該区画4aごとに電極を対応させることができるため、腹直筋4を一層効果的に刺激することができる。
Moreover, in this example, the
また、本例では第4右側電極314及び第4左側電極324は、中心軸10aを基準として線対称の位置に位置している。これにより、腹直筋4を刺激するのに一層適した筋肉電気刺激装置1となる。
In the present example, the fourth
(実施例3)
本実施例3では、実施例1における切り込み部17(図1参照)に替えて、図18に示すように、切り込み部170を備えるとともに、切り込み部17の周囲の構成を変更している。なお、本例において、実施例1と同等の要素には同一の符号を付して、その説明を省略する。
本実施例3の筋肉電気刺激装置1において、図18、図19に示すように、切り込み部170の先端部170a(切り込み部170の最も奥の部分)は、実施例1の切り込み部17の先端部17a(図1参照)に比べて、曲率半径が大きくなっている。図18に示すように、平面視における先端部170aの曲率半径は2.0mm〜5.0mmとすることができ、本例では2.5mmとしている。
(Example 3)
In the third embodiment, instead of the cut portion 17 (see FIG. 1) in the first embodiment, a
In the electrical
図19、図20に示すように、切り込み部170の縁部は、電極支持部121の厚さ(Z方向の大きさ)が、切り込み部170の縁部の周囲の領域である周囲部173よりも大きくなっている。これにより、厚肉部171が形成されている。図20に示すように、厚肉部171の厚さt2は、周囲部173の厚さt1の1.5〜5.0倍の範囲内とすることができ、本例では2倍となっている。なお、厚肉部171の厚さt2及び周囲部173の厚さt1はいずれも、電極支持部121の厚さと基材33の厚さとを合わせたものである。本例では、各基部331〜333、341〜343の外縁のうち、切り込み部170の縁部を除く部分の厚さは、厚肉部171の厚さt2よりも小さくなっている。
As shown in FIGS. 19 and 20, the edge portion of the
図19〜図21に示すように、厚肉部171と周囲部173との間には、厚肉部171から周囲部173に向うにつれて厚さが小さくなる徐変部172が形成されている。図20、図21に示すように、厚肉部171の幅k1、k2は所定の大きさとすることができ、本例では1.0mm〜6.0mmとしている。
As shown in FIGS. 19 to 21, a gradually changing
本例の筋肉電気刺激装置1によれば、切り込み部170の先端170aの曲率半径が大きくなっているため、使用時において、図22に示すように、筋肉電気刺激装置1を人体2から取り外すために、矢印Eで示すように基部341の外縁から剥がしても、切り込み部170の先端170a(図18参照)に力が集中しにくくなっている。これにより、切り込み部170の先端170aが裂けたり、基部331が破断したりすることが防止される。さらに、リード部39や電極接続部395に施されたシリコンコーティングが剥がれたりすることも防止される。各基部331〜333、342、343についても、基部341と同様に切り込み部170の先端170aが裂けたり、各基部331〜333、342、343が破断したりすることが防止され、リード部38、39や電極接続部385〜387、396、397に施されたシリコンコーティングが剥がれたりすることも防止される。
According to the electrical
さらに、本例の筋肉電気刺激装置1によれば、厚肉部171を有することにより、切り込み部170の先端170aの強度が高まるため、使用時において、筋肉電気刺激装置1を人体から取り外す際に、万が一、切り込み部170の先端170aに過度に力が集中した場合でも、切り込み部170の先端170aの裂けや、各基部331〜333、341〜343の破断、上記シリコンコーティングの剥離が一層防止される。
Furthermore, according to the electrical
さらに、本例の筋肉電気刺激装置1によれば、周囲部173は厚肉部171よりも厚さが小さいため、各基部331〜333、341〜343の曲げ易さが確保されている。これにより、筋肉電気刺激装置1の人体に対する取り付けや取り外しのし易さが確保されている。
Furthermore, according to the electrical
さらに、本例の筋肉電気刺激装置1によれば、徐変部172が形成されていることにより、筋肉電気刺激装置1を人体から取り外す際に、厚肉部171と周囲部173との間に力が集中することが緩和され、切り込み部170の先端170aの裂けや、各基部331〜333、341〜343の破断、上記シリコンコーティングの剥離が防止される。
Furthermore, according to the muscular
さらに、本例の筋肉電気刺激装置1によれば、基材33及び電極支持部121の外縁のうち、切り込み部170の縁部を除く部分の厚さは、厚肉部171よりも薄くなっている。これにより、各基部331〜333、341〜343の曲げ易さを確保しつつ、切り込み部170の先端170aの裂けや、各基部331〜333、341〜343の破断、上記シリコンコーティングの剥離が防止される。
Furthermore, according to the electrical
なお、本例では、電極支持部121の厚さを大きくすることによって厚肉部171を形成したが、これに替えて、基材33の厚さを大きくすることにより厚肉部171を形成してもよい。なお、本例においても、実施例1の場合と同等の作用効果を奏する。
In this example, the
(変形例3)
変形例3の筋肉電気刺激装置100では、図23、図24に示すように、実施例3と同等の切り込み部170及び厚肉部171を有する。そして、電極として、実施例3の電極311、321と同様の構成ではあるが、一回り大きい電極311、321を2個備える。なお、変形例3において実施例3と同等の構成要素には同一の符号を付して、その説明を省略する。
(Modification 3)
As shown in FIGS. 23 and 24, the electrical
変形例3の筋肉電気刺激装置100は、図23、図24に示すように、以下(1)〜(6)の構成を有するものである。
(1) 複数の電極311、321を有するシート状のベース体(基材33及び電極支持部121)を備え、上記電極311、321から人体に電気刺激を付与するように構成された筋肉電気刺激装置100であって、
上記ベース体(基材33及び電極支持部121)には、互いに隣り合う上記電極311、321の間に内方に向って切り込まれた切り込み部170が形成されているとともに、該切り込み部170の縁部には、該縁部の周囲(周囲部173)よりも厚さが大きい厚肉部171が形成されている、筋肉電気刺激装置100。
(2) 上記切り込み部170の先端170aは、平面視において曲率半径が2.0mm〜5.0mmの範囲内の湾曲形状をなしている、上記(1)に記載の筋肉電気刺激装置100。
(3) 上記厚肉部171の厚さt2は、上記縁部の周囲(周囲部173)の厚さt1の1.5〜5.0倍の範囲内である、上記(1)又は(2)に記載の筋肉電気刺激装置100。
(4) 上記ベース体(基材33及び電極支持部121)は、上記複数の電極が形成されたシート状の基材33と、該基材33に積層された電極支持部121とからなり、上記厚肉部171における上記電極支持部121の厚さは、上記厚肉部171の周囲(周囲部173)における厚さよりも大きくなっている、上記(1)〜(3)のいずれか一つに記載の筋肉電気刺激装置100。
(5) 上記ベース体(基材33及び電極支持部121)には、上記厚肉部171と、上記切り込み部170の縁部の周囲(周囲部173)との間に、厚肉部171から周囲部173に向うにつれて厚さが小さくなる徐変部172が形成されている、上記(1)〜(4)のいずれか一つに記載の筋肉電気刺激装置100。
(6) 上記ベース体(基材33及び電極支持部121)の外縁のうち、上記切り込み部170の縁部を除く部分の厚さは、上記厚肉部171よりも薄くなっている、上記(1)〜(5)のいずれか一つに記載の筋肉電気刺激装置100。
As shown in FIGS. 23 and 24, the electrical
(1) A muscular electrical stimulation comprising a sheet-like base body (
The base body (
(2) The electrical
(3) The thickness t2 of the
(4) The base body (
(5) From the
(6) Of the outer edges of the base body (the
筋肉電気刺激装置100は、上記(1)の構成を有することにより、厚肉部171を有することから、切り込み部170の先端170aの強度が高まるため、使用時において、筋肉電気刺激装置1を人体から取り外す際に、万が一、切り込み部170の先端170aに過度に力が集中した場合でも、切り込み部170の先端170aの裂けや、各基部331〜333、341〜343の破断、上記シリコンコーティングの剥離が防止される。
Since the muscular
筋肉電気刺激装置100は、上記(2)の構成を有することにより、切り込み部170の先端170aの曲率半径が大きくなっているため、使用時において、筋肉電気刺激装置1を人体から取り外すために各基部331、341の外縁から剥がすときに、切り込み部170の先端170aに力が集中しにくくなっている。これにより、切り込み部170の先端170aの裂けや、各基部331、341の破断が防止される。さらに、リード部38、39や電極接続部385、395に施されたシリコンコーティングの剥離も防止される。また、上記(2)の構成を有することにより、切り込み部170の先端170aの曲率半径が大きくなりすぎないため、切り込み部170の深さ(切り込み量)を確保することができ、各基部331、341が曲げ易くできる。
Since the electrical
切り込み部170の先端170aの曲率半径は、2.5mmとすることがより好ましい。これにより、切り込み部170の先端170aに過度に力が集中した場合でも、切り込み部170の先端170aの裂けや、各基部331〜333、341〜343の破断、上記シリコンコーティングの剥離が十分防止されるとともに、切り込み部170が所定の大きさに確保されるため、各基部331、341が曲げ易くなり、筋肉電気刺激装置100の人体に対する取り付けや取り外しのし易さが確保される。
The radius of curvature of the
筋肉電気刺激装置100は、上記(3)の構成を有することにより、厚肉部171の厚さt2が厚い状態に確保されるため、切り込み部170の先端170aの裂けや、各基部331〜333、341〜343の破断、上記シリコンコーティングの剥離の防止効果が確保されるとともに、切り込み部170の周囲(周囲部173)の厚さが薄い状態に確保されるため、筋肉電気刺激装置100の人体に対する取り付けや取り外しのし易さが確保される。
Since the electrical
筋肉電気刺激装置100は、上記(4)の構成を有することにより、基材33の厚さを大きくすることによって厚肉部171を形成する場合に比べて、厚肉部171の形成が容易となる。
Since the muscular
筋肉電気刺激装置100は、上記(5)の構成を有することにより、筋肉電気刺激装置100を人体から取り外す際に、厚肉部171と周囲部173との間に力が集中することが緩和され、切り込み部170の先端170aの裂けや、各基部331、341の破断、上記シリコンコーティングの剥離が防止される。
When the muscular
筋肉電気刺激装置100は、上記(6)の構成を有することにより、各基部331、341の曲げ易さを確保しつつ、切り込み部170の先端170aの裂けや、各基部331、341の破断、上記シリコンコーティングの剥離が防止される。
The muscular
そして、筋肉電気刺激装置100によれば、電極が6個の場合(図2参照)に比べて、電極311、321の個数が少ないため、電極あたりの消費電力を大きくすることができることから、各電極311、321を一回り大きくしている。これにより、電極1つによって電気刺激を付与できる範囲が広がり、腕部、大腿部等の大きい部位の筋肉を刺激しやすくなっている。
And according to the muscular
また、筋肉電気刺激装置100では、図24に示すように、同一極性の電圧が印加される電極311、321はそれぞれ一つしか備えられていないが、リード部38、39は、本体部10の外縁に沿って形成された端子接続部(第1端子接続部383及び第2端子接続部393)を有している。これにより、万が一、リード部38、39の一部が破損しても、電極311、321への通電を確保できる可能性が高まることが期待できる。
In addition, as shown in FIG. 24, the muscular
1 筋肉電気刺激装置
10 本体部
10a 中心線
20 電源部
30 電極部
311、312、313、321、322、323 電極
33 基材
35 パッド
36 パッド貼り付け部
38、39 リード部
40 制御部
DESCRIPTION OF
Claims (6)
上記制御部は、同一極性の電圧が印加される複数の端子を有し、
上記リード部は、上記複数の端子同士を接続する端子接続部と、該端子接続部と上記電極とを接続する電極接続部と、を有し、
上記各電極から上記端子までの最短経路の長さはそれぞれ、上記最短経路の平均長さとの差が、該平均長さの20%未満となっていることを特徴とする筋肉電気刺激装置。 A main body, a power supply housed in the main body, an electrode having three or more electrodes to which power is supplied from the power supply, and the power supply to the electrode is controlled and the main body A muscular electrical stimulation device comprising: a stored control unit; and a lead unit that electrically connects the electrode unit and the control unit, and configured to apply electrical stimulation to the human body from the electrode unit. And
The control unit has a plurality of terminals to which voltages of the same polarity are applied,
The lead portion includes a terminal connection portion that connects the plurality of terminals, and an electrode connection portion that connects the terminal connection portion and the electrode,
The length of the shortest path from each electrode to the terminal is different from the average length of the shortest path by less than 20% of the average length.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015122381 | 2015-06-17 | ||
| JP2015122381 | 2015-06-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017006644A true JP2017006644A (en) | 2017-01-12 |
Family
ID=57762213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016106643A Pending JP2017006644A (en) | 2015-06-17 | 2016-05-27 | Muscle electrostimulator |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017006644A (en) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3395399A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| EP3395398A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| EP3395401A1 (en) | 2017-04-24 | 2018-10-31 | MTG Co., Ltd. | Exercise instrument controller and exercise instrument control program |
| KR101977734B1 (en) * | 2018-09-20 | 2019-05-13 | (주)스마트메디칼디바이스 | Electric stimulator for muscular exercise |
| CN110913944A (en) * | 2018-06-08 | 2020-03-24 | 株式会社好玛研究所 | Electrical stimulation device |
| JP2020081148A (en) * | 2018-11-20 | 2020-06-04 | 株式会社 Mtg | Training method |
| KR20200112882A (en) | 2018-01-31 | 2020-10-05 | 가부시키가이샤 엠티지 | Muscle electrical stimulation device |
| WO2021025042A1 (en) | 2019-08-06 | 2021-02-11 | 株式会社Mtg | Electrical stimulation fitness wear |
| KR20240021810A (en) | 2021-06-14 | 2024-02-19 | 가부시키가이샤 엠티지 | electrical stimulation fitness wear |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010131253A (en) * | 2008-12-05 | 2010-06-17 | Japan Esthetique Kyokai:Kk | Electrical muscle stimulation device |
| WO2013181508A1 (en) * | 2012-05-31 | 2013-12-05 | Zoll Medical Corporation | Long term wear multifunction biomedical electrode |
| US20140236258A1 (en) * | 2013-02-21 | 2014-08-21 | Meagan Medical, Inc. | Cutaneous field stimulation with disposable and rechargeable components |
-
2016
- 2016-05-27 JP JP2016106643A patent/JP2017006644A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010131253A (en) * | 2008-12-05 | 2010-06-17 | Japan Esthetique Kyokai:Kk | Electrical muscle stimulation device |
| WO2013181508A1 (en) * | 2012-05-31 | 2013-12-05 | Zoll Medical Corporation | Long term wear multifunction biomedical electrode |
| US20140236258A1 (en) * | 2013-02-21 | 2014-08-21 | Meagan Medical, Inc. | Cutaneous field stimulation with disposable and rechargeable components |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3395401A1 (en) | 2017-04-24 | 2018-10-31 | MTG Co., Ltd. | Exercise instrument controller and exercise instrument control program |
| KR20180119088A (en) | 2017-04-24 | 2018-11-01 | 가부시키가이샤 엠티지 | Exercise instrument controller and exercise instrument control program |
| US10792494B2 (en) | 2017-04-24 | 2020-10-06 | Mtg Co., Ltd. | Exercise instrument controller and exercise instrument control program |
| KR20230029723A (en) | 2017-04-27 | 2023-03-03 | 가부시키가이샤 엠티지 | Muscle electrostimulation device |
| EP3395398A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| US20180311493A1 (en) * | 2017-04-27 | 2018-11-01 | Mtg Co., Ltd. | Muscle electrostimulation device |
| KR20180120555A (en) | 2017-04-27 | 2018-11-06 | 가부시키가이샤 엠티지 | Muscle electrostimulation device |
| EP3395399A1 (en) | 2017-04-27 | 2018-10-31 | MTG Co., Ltd. | Muscle electrostimulation device |
| KR20200112882A (en) | 2018-01-31 | 2020-10-05 | 가부시키가이샤 엠티지 | Muscle electrical stimulation device |
| CN110913944A (en) * | 2018-06-08 | 2020-03-24 | 株式会社好玛研究所 | Electrical stimulation device |
| CN110913944B (en) * | 2018-06-08 | 2023-08-15 | 株式会社好玛研究所 | Electrical stimulation device |
| KR101977734B1 (en) * | 2018-09-20 | 2019-05-13 | (주)스마트메디칼디바이스 | Electric stimulator for muscular exercise |
| JP2020081148A (en) * | 2018-11-20 | 2020-06-04 | 株式会社 Mtg | Training method |
| JP2022180435A (en) * | 2018-11-20 | 2022-12-06 | 株式会社 Mtg | training method |
| KR20220044959A (en) | 2019-08-06 | 2022-04-12 | 가부시키가이샤 엠티지 | electrical stimulation fitness wear |
| WO2021025042A1 (en) | 2019-08-06 | 2021-02-11 | 株式会社Mtg | Electrical stimulation fitness wear |
| KR20240021810A (en) | 2021-06-14 | 2024-02-19 | 가부시키가이샤 엠티지 | electrical stimulation fitness wear |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017006644A (en) | Muscle electrostimulator | |
| JP6367510B1 (en) | Muscle electrical stimulator | |
| WO2016143145A1 (en) | Electrical muscle stimulation device | |
| WO2016171161A1 (en) | Muscular electric stimulation device | |
| JP2016202796A (en) | Muscle electrostimulator | |
| JP6517079B2 (en) | Muscle electrical stimulation device | |
| JP2016202409A (en) | Muscle electrical stimulation device | |
| JP2017006215A (en) | Muscular electrostimulation device | |
| JP5976977B1 (en) | Muscle electrical stimulator | |
| JP6476063B2 (en) | Muscle electrical stimulator | |
| JP6846207B2 (en) | Muscle electrical stimulator | |
| JP2016209508A (en) | Muscle electrostimulator | |
| JP2018183454A (en) | Voltage application apparatus | |
| JP6937153B2 (en) | Muscle electrical stimulator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190508 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200203 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200519 |