WO2025121358A1 - 位置判定システム、位置判定装置、及び位置判定方法 - Google Patents
位置判定システム、位置判定装置、及び位置判定方法 Download PDFInfo
- Publication number
- WO2025121358A1 WO2025121358A1 PCT/JP2024/042905 JP2024042905W WO2025121358A1 WO 2025121358 A1 WO2025121358 A1 WO 2025121358A1 JP 2024042905 W JP2024042905 W JP 2024042905W WO 2025121358 A1 WO2025121358 A1 WO 2025121358A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- mobile terminal
- anchors
- anchor
- communication
- distance measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
Definitions
- This disclosure relates to technology for determining the location of a mobile device.
- Patent Document 1 discloses a short-range wireless communication system that performs wireless communication with a user's mobile terminal using short-range wireless communication conforming to standards such as Bluetooth (registered trademark). This short-range wireless communication system estimates the position of the mobile terminal based on the received signal strength (Received Signal Strength Indicator, hereinafter referred to as RSSI) of radio waves received from the mobile terminal.
- RSSI Received Signal Strength Indicator
- LE-CS ranging channel sounding ranging using Bluetooth Low Energy communication
- the signal transmission and reception time is longer than with wireless ranging using RSSI, which can make radio interference more likely to occur.
- the present disclosure aims to provide a position determination system, a position determination device, and a position determination method that can suppress the occurrence of radio wave interference even when LE-CS ranging is adopted.
- one disclosed aspect is a position determination system that includes a plurality of anchors that perform ranging communication to measure the distance to a mobile terminal, and a control device that controls the plurality of anchors, in which the anchors perform channel sounding ranging via Bluetooth Low Energy communication and obtain ranging data related to phase difference or time of flight, and a processing circuit provided in at least one of the anchors or the control device determines a valid anchor from among the plurality of anchors based on information related to the position of the mobile terminal, and includes a communication control unit that limits the channel sounding ranging of unnecessary anchors that are anchors other than the valid anchors, and a position determination unit that determines the position of the mobile terminal based on the ranging data of the valid anchors.
- Another disclosed aspect is a position determination device that controls multiple anchors and causes the anchors to perform channel sounding ranging via Bluetooth Low Energy communication as ranging communication for measuring the distance to a mobile terminal, and includes a communication control unit that determines a valid anchor from among the multiple anchors based on information regarding the position of the mobile terminal and limits the channel sounding ranging of unnecessary anchors other than the valid anchor, and a position determination unit that determines the position of the mobile terminal based on ranging data related to the phase difference or flight time acquired by the valid anchor.
- Another disclosed aspect is a position determination method for determining the position of a mobile terminal by distance measurement communication using multiple anchors, the position determination method including the steps of determining a valid anchor from among the multiple anchors based on information regarding the position of the mobile terminal, performing channel sounding distance measurement using Bluetooth Low Energy communication using the valid anchor, obtaining distance measurement data related to phase difference or flight time, restricting channel sounding distance measurement of unnecessary anchors that are anchors other than the valid anchors, and identifying the position of the mobile terminal based on the distance measurement data of the valid anchor, in processing performed by at least one processing unit.
- LE-CS ranging of unnecessary anchors that are anchors other than valid anchors is restricted. As described above, by restricting the anchors that perform LE-CS ranging, it is possible to suppress radio interference.
- a position determination system that includes a plurality of anchors that perform ranging communication to measure the distance to a mobile terminal, and a control device that controls the plurality of anchors, in which the anchors have at least a first mode for transmitting and receiving RTT packets to calculate the time of flight of a signal and a second mode for transmitting and receiving CW signals to calculate the phase of the signal, as execution modes for channel sounding ranging using Bluetooth Low Energy communication, and a processing circuit provided in at least one of the anchors or the control device includes a communication control unit that determines the execution mode to be executed by the anchor from the first mode or the second mode based on information regarding the position of the mobile terminal, and a position determination unit that determines the position of the mobile terminal based on the ranging data acquired by the execution mode determined by the communication control unit.
- a position determination device that controls multiple anchors and causes the anchors to perform channel sounding distance measurement using Bluetooth Low Energy communication as a distance measurement communication for measuring the distance to a mobile terminal
- the position determination device comprising: a communication control unit that determines an execution mode to be executed by the anchor from among a first mode for transmitting and receiving an RTT packet for calculating the flight time of a signal and a second mode for transmitting and receiving a CW signal for calculating the phase of a signal, based on information regarding the position of the mobile terminal; and a position determination unit that determines the position of the mobile terminal based on the distance measurement data acquired by the execution mode determined by the communication control unit.
- Another disclosed aspect is a position determination method for determining the position of a mobile terminal by ranging communication by multiple anchors, which includes the steps of: determining an execution mode of channel sounding ranging by Bluetooth Low Energy communication to be executed by the anchor from among a first mode in which an RTT packet is transmitted and received to calculate the time of flight of a signal, and a second mode in which a CW signal is transmitted and received to calculate the phase of the signal, based on information regarding the position of the mobile terminal; acquiring ranging data by executing channel sounding ranging in the determined execution mode; and identifying the position of the mobile terminal based on the acquired ranging data, in the processing performed by at least one processing unit.
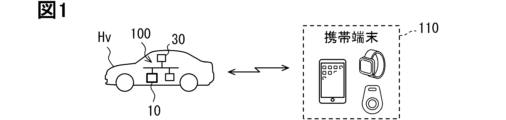
- FIG. 1 is a diagram showing an overall view of a vehicle key system according to the present disclosure.
- 2 is a block diagram showing the electrical configuration of the vehicle key system and the mobile terminal;
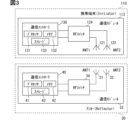
- FIG. 2 is a block diagram showing detailed configurations of an anchor and a mobile terminal.
- FIG. 13 is a diagram showing an example of an anchor mounting position and a terminal area.
- 11 is a table showing a comparison of features of a plurality of distance measuring methods.
- FIG. 10 is a diagram showing details of signals transmitted in multiple execution modes of channel sounding ranging.
- 11 is a table showing an example of antenna switching for switching communication paths in phase difference ranging.
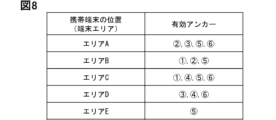
- 11 is a table showing an example of link information between terminal areas and valid anchors.
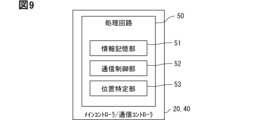
- FIG. 2 is a block diagram showing a configuration of a processing circuit.
- FIG. 12 is a flowchart showing details of a distance measurement communication process according to the first embodiment, together with FIG. 11.
- 11 is a flowchart showing details of the distance measurement communication process together with FIG. 10.
- 13 is a diagram showing an example of valid anchors and unnecessary anchors in a scene in which a mobile terminal is moving in a second embodiment of the present disclosure.
- FIG. 13 is a diagram showing an example of valid anchors and unnecessary anchors in a scene in which a mobile terminal is not moving.
- 11 is a flowchart showing details of the distance measurement communication process together with FIG. 10.
- 13 is a diagram showing an example of valid anchors and unnecessary anchors in a scene in which a mobile terminal is approaching a vehicle in a third embodiment of the present disclosure.
- FIG. 11 is a diagram showing an example of valid anchors and unnecessary anchors in a scene in which a mobile terminal is moving away from a vehicle; 11 is a flowchart showing details of the distance measurement communication process together with FIG. 10.
- FIG. 13 is a diagram showing an example of a terminal area set around a vehicle in a vehicle key system according to a fourth embodiment of the present disclosure.
- FIG. 13 is a diagram showing a distance measurement method performed when a mobile terminal is in a distant area.
- FIG. 2 illustrates a distance measurement method implemented when the mobile terminal is in an intermediate area.
- FIG. 13 is a diagram showing a distance measurement method performed when a mobile terminal is in a nearby area.
- 11 is a flowchart showing details of the distance measurement communication process together with FIG. 10.
- FIG. 11 is a flowchart showing details of a distance measurement communication process according to a fifth embodiment of the present disclosure, together with FIG. 10 .
- 11 is a flowchart showing details of a distance measurement communication process according to a sixth embodiment of the present disclosure, together with FIG. 10 .
- 11 is a flowchart showing details of a distance measurement communication process according to a seventh embodiment of the present disclosure, together with FIG. 10 .
- 10 is a flowchart showing details of a distance measurement communication process when distance measurement communication is performed among a plurality of portable terminals.
- FIG. 11 is a diagram showing details of distance measurement performed between multiple mobile terminals.
- FIG. 13 is a diagram showing an example of a terminal area in the first modified example. 13 is a table showing an example of link information according to the first modified example. 13 is a diagram showing the arrangement of anchors in a vehicle key system according to modified example 2.
- a vehicle key system 100 is mounted on a moving body such as a vehicle Hv.
- the vehicle key system 100 is a system for providing security-related benefits to a user of the vehicle Hv.
- the vehicle key system 100 can provide the user with functions related to locking and unlocking the doors of the vehicle Hv, functions related to starting the engine, and functions related to anti-theft.
- the vehicle key system 100 includes a digital key ECU (hereinafter, DK-ECU) 10 and multiple anchors 30.
- ECU is an abbreviation for Electronic Control Unit.
- DK is an abbreviation for Digital Key.
- the vehicle key system 100 is capable of communicating with a mobile terminal 110 carried by the user of the vehicle Hv.
- the mobile terminal 110 is a key device that functions as a key for the vehicle Hv.
- Short-distance communication is communication that conforms to a specific short-distance wireless communication standard, with a practical communication distance of 1 m to 30 m, and up to about 100 m.
- Bluetooth Low Energy communication/Bluetooth (registered trademark) Low Energy (hereinafter, Bluetooth LE) and the like can be adopted as the short-distance communication standard.
- Communication conforming to the Bluetooth LE standard will be referred to as LE communication hereinafter.
- Short-distance communication may also be referred to as SR (Short Range) communication.
- SR Short Range
- Wireless signals exchanged between wireless modules which will be described later, contain codes that indicate the sender or destination. The sender and destination of the wireless signal are expressed, for example, by a device ID.
- the mobile terminal 110 is a key device equipped with a short-range communication function.
- Various key devices that can be carried by the user of the vehicle Hv such as a smartphone, a wearable device, a key fob, etc., can be used as the mobile terminal 110.
- the wearable device may have various shapes, such as a wristband type, a watch type, a finger ring type, a glasses type, and an earphone type.
- the key fob may be a dedicated device (such as a smart key) as an electronic key for the vehicle Hv.
- the key fob is one of the accessories of the vehicle Hv that is transferred to the owner when the vehicle Hv is purchased.
- the smart key may have various shapes, such as a flat rectangular parallelepiped type, a flat ellipsoid type, a card type, etc.
- the mobile terminal 110 includes a terminal control unit 111 and a communication module 113.
- the terminal control unit 111 is a processing circuit that controls the operation of the mobile terminal 110.
- the terminal control unit 111 includes a processor 112a, a memory, a storage 112b, an input/output circuit, and the like, and functions as a computer that executes various processes for operating the mobile terminal 110.
- the communication module 113 is a wireless module provided in the mobile terminal 110.
- the communication module 113 is capable of performing LE communication.
- the configuration and functions of the communication module 113 may be the same as those of the communication module 33 of the anchor 30, which will be described later.
- the communication module 113 has two-axis antennas 121, 122, an RF switch 124, and a communication controller 130 (see FIG. 3).
- Antennas 121 and 122 are antenna elements that transmit and receive radio waves in the above-mentioned frequency band (2.4 GHz band) used in LE communication. Antennas 121 and 122 correspond to "terminal antennas.” Antennas 121 and 122 are electrically connected to RF switch 124.
- the RF switch 124 is a signal processing circuit that performs signal processing related to the transmission and reception of radio signals.
- the RF switch 124 includes a modulation circuit, a demodulation circuit, a frequency conversion circuit, an amplifier circuit, a local oscillator, and other components.
- the RF switch 124 performs output processing of signals directed to the antennas 121 and 122, and input processing of signals received by the antennas 121 and 122.
- the RF switch 124 can switch between the two-axis antennas 121 and 122.
- the RF switch 124 is connected to the communication controller 130 so that they can communicate with each other.
- the RF switch 124 demodulates the signals received by the antennas 121 and 122, and provides them to the communication controller 130.
- the RF switch 124 modulates the transmission data input from the communication controller 130, and radiates them as radio waves from the antennas 121 and 122.
- the communication controller 130 includes a processor 131, a memory 132, a storage 133, and an input/output circuit.
- the communication controller 130 is a microcomputer or microcontroller that controls the RF switch 124.
- At least one of the storages 112b, 133 of the terminal control unit 111 or the communication controller 130 stores the device ID of the mobile terminal 110 and a key code (encryption key) used in wireless authentication processing with the DK-ECU 10.
- at least one of the storages 112b, 133 has application software (digital key app) installed that causes the mobile terminal 110 to function as a key for the vehicle Hv.
- the digital key app is a program that performs secure communication with the DK-ECU 10 and responds to inquiries and requests from the DK-ECU 10.
- the communication module 113 transmits an advertising signal at a predetermined transmission interval.
- the advertising signal is a wireless signal for notifying other devices of the presence of the mobile terminal.
- the communication module 113 performs a communication connection process with the DK-ECU 10 based on receiving a connection request from the DK-ECU 10.
- a connection request is returned from the vehicle key system 100 (DK-ECU 10), and a communication connection between the mobile terminal 110 and the DK-ECU 10 is established.
- the communication module 113 performs authentication processing by short-range communication (hereinafter, wireless authentication processing) based on the establishment of a communication connection with the DK-ECU 10.
- the wireless authentication processing is performed, for example, by a challenge-response method.
- the DK-ECU 10 is connected to an in-vehicle network that is constructed as a communication network within the vehicle Hv.
- Standards for the in-vehicle network include Controller Area Network (CAN: registered trademark), Ethernet (registered trademark), and FlexRay (registered trademark).
- the DK-ECU 10 is connected to each of the multiple anchors 30 via the in-vehicle network or via a dedicated communication cable.
- the DK-ECU 10 is mounted at any position in the vehicle Hv.
- the DK-ECU 10 is attached to the left C-pillar of the vehicle Hv (see FIG. 4).
- the C-pillar is the third pillar from the front among the pillars provided on the vehicle Hv.
- the DK-ECU 10 may be disposed in the instrument panel, the overhead console, the right C-pillar, under the driver's seat, etc.
- the DK-ECU 10 controls multiple anchors 30. In cooperation with the multiple anchors 30, the DK-ECU 10 functions as a position determination device that determines the position of the mobile terminal 110 (hereinafter, terminal position).
- the terminal position means the relative position of the mobile terminal 110 with respect to the vehicle Hv. Since the mobile terminal 110 is linked to the user, determining the terminal position corresponds to determining the user position.
- the DK-ECU 10 includes a gateway module 13, an in-vehicle connection circuit 15, and a main controller 20.
- the gateway module 13 is a wireless module provided in the DK-ECU 10.
- the gateway module 13 is capable of at least performing LE communication.
- the configuration and functions of the gateway module 13 may be the same as those of the communication modules 33, 113.
- the gateway module 13 is supplied with power from the vehicle battery even when the driving power source is set to off.
- the gateway module 13 is in a standby state, either constantly or intermittently, using power supplied from the vehicle battery even when the vehicle Hv is parked.
- the gateway module 13 periodically scans and attempts to connect to the mobile terminal 110.
- the in-vehicle connection circuit 15 is a signal processing circuit that performs signal processing between the main controller 20 and the multiple anchors 30.
- the in-vehicle connection circuit 15 includes a PHY chip and a cable connector that conform to the communication method of the anchor 30.
- the in-vehicle connection circuit 15 converts the signal input from the anchor 30 into a format that the main controller 20 can receive, and outputs the signal to the main controller 20.
- the in-vehicle connection circuit 15 performs a predetermined signal processing on the data input from the main controller 20, and outputs the data to the anchor 30.
- the main controller 20 is a processing circuit that controls the operation of the DK-ECU 10.
- the main controller 20 includes a processor 21, a memory 22, a storage 23, and an input/output circuit.
- the main controller 20 functions as a computer that executes various processes related to determining the terminal position.
- the main controller 20 maintains a stopped state of operation if the gateway module 13 does not receive a signal sent from the mobile terminal 110.
- the main controller 20 starts up when communication is established between the gateway module 13 and the mobile terminal 110.
- the anchor 30 is used to determine the terminal position.
- the anchor 30 performs LE communication with the mobile terminal 110 based on an instruction from the DK-ECU 10.
- the anchor 30 includes a communication module 33 and an in-vehicle communication circuit .
- the communication module 33 is a wireless module provided in the anchor 30.
- the communication module 33 is capable of performing LE communication.
- the configuration and functions of the communication module 33 may be the same as those of the communication module 113 and the gateway module 13 described above.
- the communication module 33 has two-axis antennas 31 and 32, an RF switch 34, and a communication controller 40 (see FIG. 3).
- the antennas 31 and 32, the RF switch 34, and the communication controller 40 are substantially the same as the antennas 121 and 122, the RF switch 124, and the communication controller 130 of the communication module 113.
- the antennas 31 and 32 correspond to "anchor antennas.”
- the communication controller 40 includes a processor 41, a memory 42, a storage 43, an input/output circuit, and the like.
- the communication controller 40 is a microcomputer or microcontroller that controls the RF switch 34.
- the in-vehicle communication circuit 35 is a signal processing circuit that performs signal processing between the anchor 30 and the main controller 20.
- the in-vehicle communication circuit 35 converts the signal input from the DK-ECU 10 into a format that can be received by the communication module 33, and outputs it to the communication module 33.
- the in-vehicle communication circuit 35 performs a specified signal processing on the data input from the communication module 33, and outputs it to the DK-ECU 10.
- the anchor 30 operates according to instructions obtained from the DK-ECU 10.
- the anchor 30 starts up based on instructions from the DK-ECU 10 and performs distance measurement communication, which will be described later.
- the state in which the anchor 30 is capable of communication is an active state, a wake state, etc.
- the anchor 30 stops operation, either spontaneously or based on instructions from the DK-ECU 10.
- the stopped operation state is a state in which power consumption can be reduced, and is a power saving state, power saving mode, sleep state, disabled state, etc. In these states, the power may be turned off, or some functions may be stopped or disabled.
- Starting up the anchor 30 means transitioning from such a power saving state to a state in which communication is possible.
- the vehicle Hv is equipped with a plurality of anchors 30a to 30f (see FIG. 4).
- the number of anchors 30 equipped on the vehicle Hv and the arrangement of each anchor 30 may be changed as appropriate for each vehicle model.
- the plurality of anchors 30a to 30f are substantially identical in configuration, function, and performance to one another.
- anchors 30a to 30d are outdoor unit or exterior anchors, and are attached to the exterior surface of the vehicle Hv.
- anchors 30e and 30f are indoor unit or interior anchors, and are attached inside the vehicle cabin of the vehicle Hv.
- Anchor 30a (anchor in FIG. 4-1) is located at the left front corner of vehicle Hv. Specifically, anchor 30a is located near the left front wheel, at the left end of the front bumper, and at the left side mirror. Such anchor 30a may be referred to as the left front anchor, the first anchor, etc.
- Anchor 30b (anchor 2 in FIG. 4) is located at the right front corner of vehicle Hv. Specifically, anchor 30b is located near the right front wheel, at the right end of the front bumper, and at the right side mirror. Such anchor 30b may be referred to as the right front anchor, the second anchor, etc.
- Anchor 30c (anchor 3 in FIG. 4) is located at the right rear corner of vehicle Hv. More specifically, anchor 30c is located near the right rear wheel and at the right end of the rear bumper. Such anchor 30c may be referred to as the right rear anchor, the third anchor, etc.
- Anchor 30d (anchor 4 in FIG. 4) is located at the rear left corner of vehicle Hv. More specifically, anchor 30d is located near the rear left wheel and at the left end of the rear bumper. Such anchor 30d may be referred to as the rear left anchor, the fourth anchor, etc.
- Anchor 30e (anchor in FIG. 4, 5) and anchor 30f (anchor in FIG. 4, 6) are positioned in the vehicle interior, offset in the front-rear direction. Anchor 30e is mounted forward of anchor 30f. Anchor 30e is specifically positioned on the instrument panel, the upper end of the windshield, the center console, etc. Anchor 30e may be referred to as the interior front anchor and the fifth anchor, etc. On the other hand, anchor 30f is mounted rearward of anchor 30e. Anchor 30f is specifically positioned on the center of the rear seat, the ceiling above the rear seat, the trunk, etc. Anchor 30f may be referred to as the interior rear anchor and the sixth anchor, etc.
- the mobile terminal 110 is a communication terminal such as a smartphone, the user performs biometric authentication, inputs a passcode, etc. on the mobile terminal 110. This makes it possible to confirm that the mobile terminal 110 is being operated by the user himself/herself in the owner device registration process.
- the user uses the mobile terminal 110 to request the management server to start the registration process for the owner device.
- the management server creates a password.
- the created password is distributed to the mobile terminal 110 and the vehicle key system 100 via wireless communication.
- the vehicle key system 100 displays, for example, a button to start pairing between the owner device and the vehicle key system 100 on a multimedia screen installed in the vehicle cabin.
- the pairing start button When the user operates the pairing start button, the pairing process begins.
- the vehicle key system 100 preferably authenticates the user by, for example, holding a smart key having a short-range wireless communication function such as NFC near the main switch.
- the user may be authenticated by inputting a passcode indicating that the user is the user on the multimedia screen.
- the pairing start button may also be displayed on the display 95 of the mobile terminal 110, rather than on the multimedia screen installed in the vehicle cabin.
- an advertising signal is sent from the slave in the LE communication (DK-ECU10 or mobile terminal 110) to the central (mobile terminal 110 or DK-ECU10).
- the central in the LE communication receives the advertising signal from the slave.
- the central confirms that the communication partner is a legitimate one based on the password distributed by the management server, it responds to the advertising signal and returns a connection request.
- An LE communication connection between the central and the slave is established based on the slave's receipt of the connection request from the central.
- the central and the slave When an LE communication connection between the central and the slave is established, the central and the slave generate encryption keys for each other and exchange them via LE communication.
- the exchanged encryption key is stored in a storage medium such as each storage device after the authenticity of the exchanged encryption key is verified.
- the data signal of the LE communication after pairing is encrypted with the exchanged encryption key. This ensures the security of the LE communication between the DK-ECU 10 and the mobile terminal 110.
- the DK-ECU 10 determines whether the mobile terminal 110 supports LE-CS ranging (described later). If the DK-ECU 10 determines that the mobile terminal 110 supports LE-CS ranging, it links the device ID of the mobile terminal 110 with the set CS compatibility flag, registers them, and saves them. Note that the confirmation of whether the mobile terminal 110 supports LE-CS ranging may be performed each time the DK-ECU 10 and the mobile terminal 110 start LE communication, rather than when the mobile terminal 110 is registered as an owner device.
- the owner device registration process is completed by notifying the management server that the mobile terminal 110 has been registered as an owner device in the vehicle key system 100 of the vehicle Hv.
- the slave in the LE communication (DK-ECU10 or mobile terminal 110) starts transmitting an advertising signal.
- the central in the LE communication (mobile terminal 110 or DK-ECU10) starts scanning for the corresponding advertising signal.
- the vehicle key system 100 and the mobile terminal 110 perform distance measurement communication to measure the distance between each anchor 30 and the mobile terminal 110.
- the vehicle key system 100 and the mobile terminal 110 combine multiple distance measurement methods depending on the scene.
- the anchor 30 and the mobile terminal 110 perform ranging (RSSI ranging) using the received signal strength (Received Signal Strength Indicator/Indication, hereinafter, RSSI) in LE communication. Furthermore, the anchor 30 and the mobile terminal 110 perform channel sounding ranging (hereinafter, LE-CS ranging) through LE communication.
- LE-CS ranging includes ranging using RTT (Round Trip Time) packets (hereinafter, RTT ranging) and phase difference ranging using a continuous wave (Continuous Wave, hereinafter, CW signal) of a predetermined waveform.
- RTT Red Trip Time
- the mobile terminal 110 is the master (central) side of the communication and corresponds to the "Initiator.”
- the anchor 30 is the slave side of the communication and corresponds to the "Reflector.” The relationship between master and slave in each ranging communication may be reversed.
- RSSI ranging is a ranging method based on RSSI, which is an intensity value related to the radio wave intensity of LE communication.
- RSSI is an intensity value related to the radio wave intensity of LE communication.
- RSSI ranging is a method of ranging that uses signals used in data communication. Therefore, compared to LE-CS ranging, RSSI ranging can keep the communication occupancy rate of LE communication low (see Figure 5).
- the communication occupancy rate is a value that indicates the proportion of the period during which signals are actually being transmitted and received (communication occupancy time) out of the communication period.
- the ranging accuracy of RSSI ranging is lower than that of LE-CS ranging.
- the RTT ranging is the ranging of mode 1 of the LE-CS ranging (see FIG. 6).
- the mobile terminal 110 and the anchor 30 transmit and receive RTT packets to each other.
- Each communication controller 40, 130 measures the round trip time from transmitting the RTT packet to receiving the response signal, and calculates the distance based on this round trip time.
- the mobile terminal 110 transmits an RTT packet to the anchor 30 (Reflector).
- the anchor 30 records the time stamp when the RTT packet is received.
- the anchor 30 transmits an RTT packet to the mobile terminal 110.
- the mobile terminal 110 records the time stamp when the RTT packet is received.
- the radio wave propagation time is calculated from the time stamp when the RTT packet is transmitted and received.
- the distance between the mobile terminal 110 and the anchor 30 is then calculated by converting the propagation time into distance. Note that the anchor 30 transmits and receives the RTT packet by changing the frequency used to avoid radio wave interference.
- RTT ranging requires the sending and receiving of RTT packets, the communication occupancy rate of LE communication is higher than that of RSSI ranging (see Figure 5). On the other hand, RTT ranging can keep the communication occupancy rate of LE communication lower than that of phase difference ranging, which will be described later. Also, the ranging accuracy of RTT ranging is higher than that of RSSI ranging, but lower than that of phase difference ranging.
- Phase difference ranging is mode 2 ranging of LE-CS ranging (see FIG. 6).
- the mobile terminal 110 and the anchor 30 transmit unmodulated CW signals to each other and measure the phase of each.
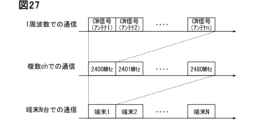
- the mobile terminal 110 and the anchor 30 increase the frequency of the CW signal in 1 or 2 MHz increments from 2400 MHz to 2480 MHz.
- the phase measured on the receiving side also changes. Based on the difference in the received phase for each frequency, the distance between the mobile terminal 110 and the anchor 30 is calculated.
- the mobile terminal 110 and anchor 30 switch antenna paths (communication routes) during communication at one frequency to measure the phase. Specifically, the RF switch 124 of the mobile terminal 110 switches the two-axis antennas 121 and 122 on and off in sequence (see FIG. 7). Similarly, the RF switch 34 of the anchor 30 switches the two-axis antennas 31 and 32 on and off in sequence (see FIG. 7). Four antenna paths (see SW1 to SW4 in FIG. 6 and FIG. 7) are used in phase difference ranging.
- phase difference ranging requires continuous transmission and reception of CW signals, the communication occupancy rate of LE communication is higher than that of RSSI ranging and RTT ranging (see Figure 5). On the other hand, the ranging accuracy of phase difference ranging can be ensured to be higher than that of RSSI ranging and RTT ranging.
- LE-CS ranging (mode 3): RTT + phase difference ranging]
- mode 3 In LE-CS ranging, it is possible to combine phase difference ranging and RTT ranging in one frequency (see mode 3 in FIG. 6).
- the mobile terminal 110 and the anchor 30 transmit an RTT packet and a CW signal in sequence.
- Such LE-CS ranging in mode 3 can ensure higher ranging accuracy.
- the communication occupancy rate of LE-CS ranging in mode 3 is higher than modes 1 and 2.
- the detailed principle of phase difference ranging by LE communication will be further explained later (Details of LE-CS ranging/phase difference ranging).
- LE-CS ranging is started when the received signal strength in LE communication exceeds a predetermined strength threshold, or when the distance between the positions measured by each GPS receiver falls below a distance threshold.
- the DK-ECU 10 transmits a request to start LE-CS ranging to the anchor 30.
- the anchor 30 transitions from a sleep state to an active state. This enables the anchor 30 to transmit a signal for LE-CS ranging.
- the anchor 30 is in a sleep state while not performing LE-CS ranging.
- LE-CS ranging is terminated when the mobile terminal 110 is powered off and the LE communication connection is disconnected, or when the received signal strength of the LE signal falls below a predetermined strength threshold.
- the strength threshold for terminating LE-CS ranging may be the same as or different (lower) than the strength threshold for starting LE-CS ranging.
- LE-CS ranging may be terminated when there is no action on the vehicle for a predetermined time after LE-CS ranging is started.
- LE-CS ranging may also be terminated when the user gets into the vehicle Hv and turns on the start switch. When any of the above-mentioned LE-CS ranging termination conditions is met, the DK-ECU 10 sends a request to the anchor 30 to stop LE-CS ranging.
- the anchor 30 If the anchor 30 does not receive a new request to start LE-CS ranging within a predetermined time after terminating LE-CS ranging based on the stop request, it can transition to a sleep state. When the communication connection with the mobile terminal 110 is cut off, the DK-ECU 10 and the anchor 30 return to the same state as before the mobile terminal 110 approached.
- LE-CS ranging When LE-CS ranging is terminated in response to the user turning on the start switch, LE-CS ranging may be started (resumed) in response to opening or closing the door of the vehicle Hv. This makes it possible to detect the position of the mobile terminal 110 through LE-CS ranging when the mobile terminal 110 is taken out of the vehicle while the vehicle Hv is temporarily stopped with the start switch not turned off.
- the vehicle key system 100 limits the anchors 30 used for LE-CS ranging depending on the area in which the mobile terminal 110 (user) is located (hereinafter referred to as the terminal area, see Figures 4 and 8). This makes it possible to keep radio transmission and reception time to a minimum even when multiple mobile terminals 110 are present, preventing deterioration of responsiveness.
- the main controller 20 of the DK-ECU 10 and the communication controller 40 of the anchor 30 are referred to as a processing circuit 50 of the vehicle key system 100 (see FIG. 9).
- the processing circuit 50 executes the position determination method according to the present disclosure.
- the processing circuit 50 is provided with an information storage unit 51, a communication control unit 52, and a position identification unit 53 as functional units.
- the functions of the information storage unit 51, the communication control unit 52, and the position identification unit 53 may be realized by only one of the main controller 20 and the communication controller 40, or may be realized by cooperation between the main controller 20 and the communication controller 40.
- the information storage unit 51 stores linking information (see FIG. 8) that links the terminal area with the valid anchor 3E described later.
- the terminal area is set around the vehicle Hv. For example, five terminal areas are set around the vehicle Hv (see FIG. 4).
- the driver's side area Aa (see FIG. 4, area A) is a terminal area that is defined so as to face the side of the driver's side of the vehicle Hv.
- the passenger's side area Ac (see FIG. 4, area C) is a terminal area that is defined so as to face the side of the passenger's side of the vehicle Hv.
- the front area Ab (see FIG. 4, area B) is a terminal area that is defined so as to face the front part of the vehicle Hv.
- the front area Ab is adjacent to the front of the driver's side area Aa and the passenger's side area Ac.
- the rear area Ad (see FIG. 4, area D) is a terminal area that is defined so as to face the rear part of the vehicle Hv.
- the rear area Ad is adjacent to the rear of the driver's side area Aa and the passenger's side area Ac.
- the outer area Ae (see area E in Figure 4) is a terminal area that is partitioned to surround the outside of the driver's side area Aa, the front area Ab, the passenger's side area Ac, and the rear area Ad.
- valid anchors 3E are set for these terminal areas.
- valid anchors 3E are the anchors 30 that perform LE-CS ranging.
- the anchors other than the valid anchors 3E are regarded as unnecessary anchors 3D (see FIG. 4).
- the unnecessary anchors 3D are restricted from performing LE-CS ranging.
- anchors 30b, 30c, 30e, and 30f are considered to be effective anchors 3E.
- anchors 30a and 30d are considered to be unnecessary anchors 3D.
- anchors 30a, 30b, and 30e are considered to be effective anchors 3E.
- anchors 30c, 30d, and 30f are considered to be unnecessary anchors 3D.
- anchors 30a, 30f, 30e, and 30f are considered to be effective anchors 3E.
- anchors 30b and 30c are considered to be unnecessary anchors 3D.
- anchors 30c, 30d, and 30f are considered to be effective anchors 3E.
- anchors 30a, 30b, and 30e are considered to be unnecessary anchors 3D.
- anchor 30e (see anchor 5 in Figure 4) is considered to be an effective anchor 3E.
- the other anchors 30a to 30d and 30e (see anchors 1 to 4 and 6 in Figure 4) are considered to be unnecessary anchors 3D.
- the communication control unit 52 determines an effective anchor 3E and an unnecessary anchor 3D from among the multiple anchors 30 based on information related to the location of the mobile terminal 110. Based on the ranging data from RSSI ranging, the communication control unit 52 identifies the terminal area in which the mobile terminal 110 is located from among multiple terminal areas set in advance. The communication control unit 52 refers to the linking information and determines an effective anchor 3E and an unnecessary anchor 3D corresponding to the identified terminal area from among the multiple anchors 30.
- the effective anchor 3E acquires ranging data related to phase difference or time of flight (RTT) by performing LE-CS ranging in modes 1 to 3.
- RTT time of flight
- the communication control unit 52 stops the signal for LE-CS ranging by the unnecessary anchor 3D as a process for restricting the operation of the unnecessary anchor 3D. This stops the transmission and reception of RTT packets and CW signals by the unnecessary anchor 3D. As a result, the unnecessary anchor 3D no longer acquires ranging data.
- the position determination unit 53 determines the position of the mobile terminal 110 based on the ranging data of the valid anchor 3E determined by the communication control unit 52. If ranging communication continues after the position determination unit 53 determines the position of the mobile terminal 110, the communication control unit 52 re-determines the terminal area and the valid anchor 3E based on the latest ranging data determined by the position determination unit 53. The position determination unit 53 re-determines the position of the mobile terminal 110 based on the ranging data of the reset valid anchor 3E.
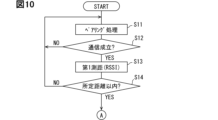
- the distance measurement communication process is started by the processing circuit 50 of the vehicle key system 100 based on the reception of a signal from the mobile terminal 110.
- the distance measurement communication process may be started when communication with the mobile terminal 110 is established, or may be started when an advertising signal is received.
- S11 of the distance measurement communication process (see FIG. 10) pairing processing between the DK-ECU 10 and the mobile terminal 110 is performed via LE communication.
- S12 the pairing processing started in S11 is completed, and it is determined whether LE communication between the vehicle key system 100 and the mobile terminal 110 has been established. If LE communication has not been established (S12: NO), the establishment of LE communication is awaited. If LE communication is not established and a timeout occurs, the distance measurement communication process is terminated.
- the processing circuit 50 performs RSSI ranging via LE communication as the first ranging in S13.
- the processing circuit 50 acquires information on the terminal location of the mobile terminal 110 through RSSI ranging.
- the processing circuit 50 determines in S14 whether the mobile terminal 110 is present within a predetermined distance from the vehicle Hv.
- the predetermined distance used in S14 corresponds to the distance to the outer edge of the outer area Ae. If it is determined that the mobile terminal 110 is not present within the predetermined distance (S14: NO), the processing circuit 50 repeats the processes of S11 to S14 and waits for the mobile terminal 110 to be within the predetermined distance.
- the communication control unit 52 identifies the terminal area in which the mobile terminal 110 is located in S21 to S24 (see FIG. 11). As one example, the communication control unit 52 identifies the terminal area in which the mobile terminal 110 is located based on the results of RSSI ranging. As another example, the communication control unit 52 starts up all anchors 30 and starts LE-CS ranging. The communication control unit 52 identifies the area in which the mobile terminal 110 is located by LE-CS ranging using all anchors 30.
- the communication control unit 52 determines whether or not the mobile terminal 110 is present in the driver's side area Aa (area A). If the mobile terminal 110 is not present in the driver's side area Aa (S21: NO), the communication control unit 52 determines whether or not the mobile terminal 110 is present in the passenger's side area Ac (area C) in S22. If the mobile terminal 110 is not present in the passenger's side area Ac (S22: NO), the communication control unit 52 determines whether or not the mobile terminal 110 is present in the rear area Ad (area D) in S23. If the mobile terminal 110 is not present in the rear area Ad (S23: NO), the communication control unit 52 determines whether or not the mobile terminal 110 is present in the front area Ab (area B) in S24.
- the communication control unit 52 determines whether or not the mobile terminal 110 is present in the front area Ab (area B) in S24.
- the communication control unit 52 determines an effective anchor 3E from among the multiple anchors 30 based on information about the terminal area identified by RSSI ranging or LE-CS ranging. In S25 to S29, an effective anchor 3E corresponding to the terminal area is determined based on the linking information stored in the information storage unit 51. Furthermore, in S30 to S34, the communication control unit 52 sets anchors 30 other than the selected effective anchor 3E as unnecessary anchors 3D, and restricts LE-CS ranging by the unnecessary anchors 3D. Once the communication control unit 52 has started up all anchors 30 for LE-CS ranging, it transmits a stop request to the anchors 30 set as unnecessary anchors 3D to end the LE-CS ranging.
- the communication control unit 52 determines in S25 the valid anchor 3E that corresponds to the driver's side area Aa. Furthermore, in S30, the communication control unit 52 determines the anchors other than the valid anchor 3E that corresponds to the driver's side area Aa as unnecessary anchors 3D, and stops the transmission and reception of distance measurement signals by these unnecessary anchors 3D.
- the communication control unit 52 determines an effective anchor 3E that corresponds to the passenger side area Ac in S26. Furthermore, the communication control unit 52 determines, in S31, the anchors other than the effective anchor 3E that corresponds to the passenger side area Ac as unnecessary anchors 3D, and stops transmission and reception of distance measurement signals by these unnecessary anchors 3D.
- the communication control unit 52 determines an effective anchor 3E that corresponds to the rear area Ad in S27. Furthermore, the communication control unit 52 determines, in S32, the anchors other than the effective anchor 3E that corresponds to the rear area Ad as unnecessary anchors 3D, and stops the transmission and reception of distance measurement signals by these unnecessary anchors 3D.
- the communication control unit 52 determines an effective anchor 3E that corresponds to the forward area Ab in S28. Furthermore, the communication control unit 52 determines, in S33, the anchors other than the effective anchor 3E that corresponds to the forward area Ab as unnecessary anchors 3D, and stops the transmission and reception of distance measurement signals by these unnecessary anchors 3D.
- the communication control unit 52 determines in S29 a valid anchor 3E that corresponds to the outer area Ae. Furthermore, in S34, the communication control unit 52 determines all anchors other than the valid anchor 3E that corresponds to the outer area Ae as unnecessary anchors 3D, and stops the transmission and reception of distance measurement signals by these unnecessary anchors 3D.
- the position identification unit 53 identifies the terminal position based on the distance measurement data of the valid anchor 3E.
- the processing circuit 50 determines whether or not to end the distance measurement. As an example, the processing circuit 50 determines to end the distance measurement when there is no longer a signal received from the mobile terminal 110 (S36: YES). In this case, the distance measurement communication process is ended.
- the processing circuit 50 decides to continue the distance measurement (S36: NO).
- the communication control unit 52 executes S21 to S24 again and identifies the terminal area in which the mobile terminal 110 is located based on the information on the terminal location identified in S35.
- the communication control unit 52 decides to continue the distance measurement and executes S21 to S24 again, it may determine whether or not the identified terminal location has moved from the terminal area identified previously. If the communication control unit 52 determines that the user has moved between different terminal areas, it activates all anchors 30 once. The communication control unit 52 determines the terminal area in which the user is located by LE-CS distance measurement using all anchors 30. Although movement between nearby terminal areas can be detected only by LE-CS distance measurement using the valid anchors 3E, by activating all anchors 30 once, the movement of the user across multiple terminal areas can be detected more accurately.
- distance measurement data is acquired by performing LE-CS distance measurement using the effective anchor 3E.
- LE-CS distance measurement of unnecessary anchors 3D, which are anchors 30 other than the effective anchor 3E is restricted. As described above, by restricting the anchors 30 that perform LE-CS distance measurement, it is possible to suppress radio wave interference.
- radio interference can be suppressed, in other words, communication occupancy can be reduced, which can prevent deterioration in the responsiveness of the digital key system even in situations where multiple mobile terminals 110 are present around the vehicle Hv. Furthermore, by keeping the radio transmission and reception time to a minimum, in addition to improving responsiveness, it is also possible to reduce the dark current of the vehicle Hv.
- the terminal area in which the mobile terminal 110 is located is identified based on a strength value related to the radio wave strength of the LE communication, i.e., RSSI. Then, based on the information of the terminal area identified using RSSI, a valid anchor 3E is determined from among the multiple anchors 30. As a result, before the start of LE-CS ranging, the rough location of the mobile terminal 110 can be identified by RSSI ranging. As a result, it becomes possible to set an unnecessary anchor 3D from the first LE-CS ranging and restrict communication by the unnecessary anchor 3D.
- a strength value related to the radio wave strength of the LE communication i.e., RSSI.
- the terminal area in which the mobile terminal 110 is located is identified based on the ranging data. Then, based on the information on the terminal area identified using the ranging data, a valid anchor 3E is determined from among the multiple anchors 30. In this way, by using the ranging data of the LE-CS ranging, the terminal area in which the mobile terminal 110 is located can be accurately determined. As a result, the valid anchor 3E and unnecessary anchor 3D are appropriately set, and it becomes possible to restrict communication by the unnecessary anchor 3D while ensuring ranging accuracy.
- linking information linking the terminal area with the valid anchor 3E is stored. Then, based on the linking information, the valid anchor 3E corresponding to the terminal area can be determined. As described above, by determining the valid anchor 3E for each terminal area, the vehicle key system 100 can accurately determine the terminal position even if communication with unnecessary anchors 3D is restricted.
- the valid anchor 3E is determined again based on the latest distance measurement data. As described above, if the valid anchor 3E is updated based on the latest distance measurement data, the communication control unit 52 can appropriately switch between the valid anchor 3E and the unnecessary anchor 3D even if the user carrying the mobile terminal 110 moves.
- the first embodiment as a process for restricting the operation of unnecessary anchors 3D, at least the transmission and reception of signals for LE-CS ranging by the unnecessary anchors 3D is stopped. In this way, by reducing the anchors 30 that perform ranging communication, it is possible to reduce the communication occupancy rate and, in turn, suppress radio wave interference.
- the DK-ECU 10 corresponds to the "position determination device” and the "control device”
- the processors 21 and 41 correspond to the "processing unit”
- the vehicle key system 100 corresponds to the "position determination system”.
- the driver's side area Aa, the front area Ab, the passenger's side area Ac, the rear area Ad, and the outer area Ae each correspond to the "terminal area”.
- Second Embodiment 12 to 14 is a modified example of the first embodiment.
- the number of anchors is controlled using the relative speed of the mobile terminal 110 with respect to the vehicle Hv.
- the communication control unit 52 changes the number of effective anchors 3E depending on whether the mobile terminal 110 is moving at a certain speed.
- the communication control unit 52 determines the valid anchors 3E and unnecessary anchors 3D associated with each terminal area, as in the first embodiment (see FIG. 8).
- the communication control unit 52 reduces the number of valid anchors 3E compared to when there is a moving speed. For example, the communication control unit 52 changes the outer anchors from valid anchors 3E to unnecessary anchors 3D.
- the communication control unit 52 calculates the moving speed of the mobile terminal 110 based on the distance measurement data from multiple anchors 30 (valid anchors 3E) in S237.
- the communication control unit 52 determines whether the calculated moving speed of the mobile terminal 110 is equal to or lower than a threshold value.
- the threshold value is a value for determining whether the mobile terminal 110 is moving or not, and is a value close to zero.
- the communication control unit 52 executes the processes from S21 onwards again.
- the communication control unit 52 identifies the current terminal area based on the information on the terminal position identified in the previous S35, and determines the valid anchors 3E and unnecessary anchors 3D. Then, the position identification unit 53 updates the terminal position.
- the communication control unit 52 determines in S238 a valid anchor 3E that corresponds to the time when the user is stopped. In this case, only the in-vehicle anchor is set as a valid anchor 3E. Furthermore, in S239, the communication control unit 52 designates all anchors other than the valid anchor 3E that corresponds to the time when the user is stopped as unnecessary anchors 3D. Then, the position identification unit 53 identifies the terminal position in the next S35 based on the distance measurement data of the valid anchor 3E determined in S238.
- the communication control unit 52 stops all anchors 3E other than the valid anchor 3E corresponding to the time of stopping as unnecessary anchors 3D, and then in S237, which is executed again, if it is determined that the moving speed of the mobile terminal 110 exceeds the threshold (S237: NO), it resets the valid anchor 3E.
- the communication control unit 52 stores the setting of the valid anchor 3E before the moving speed became equal to or lower than the threshold, and activates the stored valid anchor 3E when the moving speed exceeds the threshold again.
- the communication control unit 52 temporarily activates all anchors 30 when the moving speed exceeds the threshold again.
- the communication control unit 52 identifies the terminal area and determines the valid anchors 30 by LE-CS ranging using all anchors 30.
- the second embodiment described so far also has the same effect as the first embodiment, and by limiting LE-CS ranging by unnecessary anchors 3D, it is possible to reduce communication occupancy rate and thus suppress radio wave interference.
- the valid anchors 3E are determined based on the moving speed of the mobile terminal 110 in addition to the terminal area. Therefore, when the mobile terminal 110 is not moving, the communication control unit 52 can switch some of the valid anchors 3E (e.g., outer anchors) to additional unnecessary anchors 3D. In this way, the number of valid anchors 3E is suppressed to an extent that it is possible to confirm that the user is stopped. As described above, by reducing the number of anchors performing LE communication, it is possible to further suppress radio interference. Furthermore, when the user starts moving, the communication control unit 52 increases the number of valid anchors 3E again. Therefore, the vehicle key system 100 can accurately track the position of the user who has resumed moving.
- the valid anchors 3E e.g., outer anchors
- Third Embodiment 15 to 17 is another modified example of the first embodiment.
- the number of anchors is controlled using the moving direction of the mobile terminal 110 relative to the vehicle Hv.
- the communication control unit 52 changes the number of effective anchors 3E depending on whether the mobile terminal 110 is approaching the vehicle Hv.
- the communication control unit 52 determines the valid anchors 3E and unnecessary anchors 3D associated with each terminal area, similar to the first embodiment (see FIG. 8).
- the communication control unit 52 reduces the number of valid anchors 3E compared to when the mobile terminal 110 is approaching.
- the communication control unit 52 changes the in-vehicle anchors from valid anchors 3E to unnecessary anchors 3D.
- the communication control unit 52 calculates the moving direction of the mobile terminal 110 based on the distance measurement data from multiple anchors 30 (valid anchors 3E) in S337. The communication control unit 52 determines whether the calculated moving direction of the mobile terminal 110 is a direction approaching the vehicle Hv (hereinafter, approaching direction) or a direction moving away from the vehicle Hv (hereinafter, leaving direction).
- the communication control unit 52 executes the processes from S21 onwards again. Based on the information on the terminal position identified in the previous S35, the communication control unit 52 identifies the current terminal area and determines the valid anchor 3E and the unnecessary anchor 3D. The position identification unit 53 then updates the terminal position. Note that even if the mobile terminal 110 is not moving at all, the communication control unit 52 may consider it to be moving in the approach direction and re-execute the processes from S21 onwards.
- the communication control unit 52 determines in S338 the valid anchor 3E that corresponds to the time when the user is leaving. In this case, only the outer anchors are set as valid anchors 3E. Furthermore, in S339, the communication control unit 52 sets all anchors other than the valid anchor 3E that corresponds to the time when the user is leaving as unnecessary anchors 3D. Then, the position identification unit 53 identifies the terminal position in the next S35 based on the distance measurement data of the valid anchor 3E determined in S338.
- the communication control unit 52 stops all the valid anchors 3E other than the one corresponding to the user's departure as unnecessary anchors 3D, and then in S337, which is executed again, if it is determined that the mobile terminal 110 is moving in the approaching direction (S337: NO), it resets the valid anchor 3E.
- the communication control unit 52 stores the setting of the valid anchor 3E before the mobile terminal 110's moving direction became the leaving direction, and activates the stored valid anchor 3E when the mobile terminal 110's moving direction becomes the approaching direction again.
- the communication control unit 52 temporarily activates all anchors 30 when the mobile terminal 110's moving direction becomes the approaching direction again.
- the communication control unit 52 identifies the terminal area and determines the valid anchors 30 by LE-CS ranging using all anchors 30.
- the third embodiment described so far also has the same effect as the first and second embodiments, and by limiting LE-CS ranging by unnecessary anchors 3D, it is possible to reduce the communication occupancy rate and, in turn, suppress radio wave interference.
- the valid anchors 3E are determined based on the direction of movement of the mobile terminal 110 in addition to the terminal area. Therefore, when the mobile terminal 110 is moving away from the vehicle Hv, the communication control unit 52 can switch some of the valid anchors 3E (e.g., in-vehicle anchors) to additional unnecessary anchors 3D. As described above, when the mobile terminal 110 is approaching the vehicle Hv, it is possible to increase the number of valid anchors 3E and improve the accuracy of determining the terminal position. On the other hand, when the mobile terminal 110 is moving away from the vehicle Hv, it is possible to reduce the number of valid anchors 3E and suppress radio wave interference.
- the valid anchors 3E e.g., in-vehicle anchors
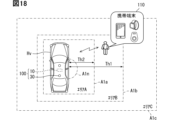
- (Fourth embodiment) 18 to 22 show a fourth embodiment of the present disclosure, which is yet another modified example of the first embodiment.
- a limiting control for switching the execution mode of LE-CS ranging is performed.
- the processing circuit configuration and the ranging communication process of the fourth embodiment will be described in detail below.
- the processing circuitry 50 of the fourth embodiment is provided with functional units such as an information storage unit 51, a communication control unit 52, and a position identification unit 53, similarly to the first embodiment shown in FIG.
- the information storage unit 51 stores information for setting the terminal area in which the mobile terminal 110 is located.
- the information storage unit 51 stores three thresholds Th1 to Th3 as information for setting the terminal area.
- the thresholds Th1 to Th3 are values that are compared with the distance measurement value from the vehicle Hv to the mobile terminal 110.
- the threshold Th1 is a value greater than the threshold Th2.
- the threshold Th2 is a value greater than the threshold Th3.
- a distant area A1c is a terminal area in which the measured distance to the mobile terminal 110 is greater than the threshold value Th1.
- the intermediate area A1b (see area B in FIG. 18) is a terminal area in which the measured distance to the mobile terminal 110 is equal to or less than the threshold value Th1 and greater than the threshold value Th2.
- the nearby area A1a (see area A in FIG. 18) is a terminal area in which the measured distance to the mobile terminal 110 is equal to or less than the threshold value Th2.
- the terminal area facing the driver's door within the nearby area A1a is set as an unlocked area A1n.
- the unlocked area A1n is a terminal area in which the measured distance to the mobile terminal 110 is equal to or less than the threshold value Th3.
- the communication control unit 52 determines the execution mode of the LE-CS ranging to be performed by the anchor 30 based on information about the position of the mobile terminal 110.
- the anchor 30 can execute LE-CS ranging in modes 1 to 3 (see FIG. 6).
- the LE-CS ranging in mode 1 is an execution mode in which an RTT packet is transmitted and received to calculate the flight time of a signal.
- the LE-CS ranging in mode 2 is an execution mode in which a CW signal is transmitted and received to calculate the phase of a signal.
- the LE-CS ranging in mode 3 is an execution mode in which an RTT packet is transmitted and received in addition to a CW signal.
- the LE-CS ranging in mode 1 corresponds to the "first mode”
- the LE-CS ranging in modes 2 and 3 correspond to the "second mode”.
- no CW signal is transmitted and received.
- an RTT packet may be transmitted and received.
- the communication control unit 52 identifies the terminal area in which the mobile terminal 110 is located from among multiple terminal areas based on the ranging data obtained by RSSI ranging. In addition, if ranging communication continues after the location determination unit 53 has determined the location of the mobile terminal 110, the communication control unit 52 again determines the terminal area based on the latest ranging data determined by the location determination unit 53. Based on the information on the determined terminal area, the communication control unit 52 switches the ranging method between RSSI ranging and LE-CS ranging. Furthermore, when performing LE-CS ranging, the communication control unit 52 switches the execution mode of the LE-CS ranging performed by the anchor 30 from modes 1 to 3 based on the information on the determined terminal area. The communication control unit 52 switches the ranging method so as to improve the accuracy of the ranging information as the mobile terminal 110 approaches the vehicle Hv.
- the communication control unit 52 determines that the mobile terminal 110 is in the distant area A1c (area C) (see FIG. 19). If the mobile terminal 110 is in the distant area A1c, the communication control unit 52 performs RSSI distance measurement.
- the communication control unit 52 determines that the mobile terminal 110 is in intermediate area A1b (area B) (see FIG. 20). If the mobile terminal 110 is in intermediate area A1b, the communication control unit 52 determines the execution mode of LE-CS ranging to mode 1. This causes the anchor 30 to execute RTT ranging.
- the communication control unit 52 determines that the mobile terminal 110 is in the nearby area A1a (see FIG. 21). If the mobile terminal 110 is in the nearby area A1a (see FIG. 18, area A), the communication control unit 52 determines the execution mode of the LE-CS ranging to be mode 2 or mode 3. This causes the anchor 30 to at least execute phase difference ranging.
- RSSI ranging by the gateway module 13 may be performed in parallel with the LE-CS ranging in modes 1 to 3.
- the communication control unit 52 may always perform RTT ranging together with phase difference ranging, or may perform RTT ranging together with phase difference ranging for confirmation at the timing of locking and unlocking the vehicle Hv. Specifically, the communication control unit 52 performs LE-CS ranging in mode 3 when the mobile terminal 110 is in the unlocked area A1n, and performs LE-CS ranging in mode 2 when the mobile terminal 110 is in the nearby area A1a outside the unlocked area A1n.
- the anchor 30 transmits and receives CW signals on multiple channels in LE-CS ranging in modes 2 and 3.
- the communication control unit 52 determines whether to transmit and receive CW signals on a specified number of reference channels or on a limited number of channels that is less than the specified number, based on information about the position of the mobile terminal 110.
- the number of reference channels is 72 of the 80 channels that are set at 1 MHz intervals from 2400 MHz to 2480 MHz.
- the limited number of channels may be a number of channels that is less than 72 channels, and may be, for example, about half the number of reference channels.
- the limited channels may be set at 2 MHz intervals in the band from 2400 MHz to 2480 MHz, for example.
- the communication control unit 52 determines that the distance to the mobile terminal 110 is equal to or less than the threshold Th3 and that the mobile terminal 110 is in the unlocked area A1n, it decides to transmit and receive the CW signal with the reference channel number. On the other hand, if the mobile terminal 110 is in the nearby area A1a outside the unlocked area A1n, the communication control unit 52 decides to transmit and receive the CW signal with the limited channel number.
- the position determination unit 53 determines the position of the mobile terminal 110 based on the ranging data obtained by the ranging method determined by the communication control unit 52. As described above, if ranging communication continues after the position determination unit 53 determines the position of the mobile terminal 110, the communication control unit 52 determines the ranging method and execution mode again based on the latest ranging data determined by the position determination unit 53. The position determination unit 53 determines the position of the mobile terminal 110 again based on the reset ranging method and execution mode.
- the communication control unit 52 determines in S421 whether there is location information (distance measurement data) that has been previously acquired within a predetermined time. For example, if the anchor 30 and the mobile terminal 110 are temporarily in a sleep state in a scene in which the user approaches the vehicle Hv from a distance, there is location information that has been previously acquired. In this case, the communication control unit 52 determines that there is location information that has been previously acquired.
- the communication control unit 52 decides in S426 to perform RSSI ranging mainly by the gateway module 13. On the other hand, if there is previously acquired location information (S421: YES), the communication control unit 52 decides in S422 and S423 to perform LE-CS ranging and further decides the execution mode of LE-CS ranging.
- the communication control unit 52 determines whether the distance measurement value is equal to or less than the threshold Th2 and whether the mobile terminal 110 is in the nearby area A1a (area A). Furthermore, in S422, the communication control unit 52 determines whether the distance measurement value is equal to or less than the threshold Th1 and whether the mobile terminal 110 is in the intermediate area A1b (area B). If the mobile terminal 110 is not in the nearby area A1a or the intermediate area A1b but is in the distant area A1c (S422, S423: NO), in S426, the communication control unit 52 decides to perform RSSI distance measurement mainly by the gateway module 13. Then, in S426, distance measurement data is acquired by performing RSSI distance measurement.
- the communication control unit 52 determines in S425 that the anchor 30 will perform RTT ranging in mode 1. Also, if the mobile terminal 110 is in the nearby area A1a (S422: YES), the communication control unit 52 determines in S424 that the anchor 30 will perform phase difference ranging in mode 2 or mode 3. In S424 and S425, ranging data is acquired by performing LE-CS ranging.
- the communication control unit 52 When performing phase difference ranging, the communication control unit 52 further determines in S427 whether the distance (distance measurement value) to the mobile terminal 110 exceeds the threshold Th3. If the distance to the mobile terminal 110 exceeds the threshold Th3 (S427: YES) and the mobile terminal 110 is in the nearby area A1a outside the unlocked area A1n, the communication control unit 52 limits the frequency (number of channels) of the CW signal transmitted and received by the anchor 30 in S428. If the user is not in the nearby area A1a, the best ranging accuracy is not required, so the frequency limit in S428 reduces the communication occupancy rate.
- Th3 S427: YES
- the communication control unit 52 determines in S429 to use all frequencies (reference number of channels).
- the location determination unit 53 determines the terminal location in S430 based on the distance measurement data acquired in S424 to S426.
- the processing circuit 50 determines whether or not to end the distance measurement in S431. If the processing circuit 50 has no more signals received from the mobile terminal 110, it determines to end the distance measurement (S431: YES) and ends the distance measurement communication processing. On the other hand, if the processing circuit 50 is still receiving signals from the mobile terminal 110, it decides to continue the distance measurement (S431: NO). In this case, the processing of S422 to S431 is executed again.
- the terminal area in which the mobile terminal 110 is located is identified based on a strength value related to the radio wave strength of the LE communication, i.e., RSSI.
- the communication control unit 52 determines the execution mode of the LE-CS ranging to be performed by the anchor 30 based on the information on the terminal area identified using RSSI.
- the approximate location of the mobile terminal 110 can be identified by RSSI ranging before the start of LE-CS ranging.
- the terminal area in which the mobile terminal 110 is located is identified based on the ranging data from the LE-CS ranging. Then, the communication control unit 52 determines the execution mode of the LE-CS ranging to be performed by the anchor 30 based on the information on the terminal area identified using the ranging data. In this way, by using the ranging data from the LE-CS ranging, the terminal area in which the mobile terminal 110 is located can be accurately grasped. As a result, it is possible to appropriately select the execution mode of the LE-CS ranging and suppress radio wave interference while ensuring the required ranging accuracy.
- the anchor 30 transmits and receives CW signals on multiple channels in LE-CS ranging in modes 2 and 3. Then, the communication control unit 52 determines whether to transmit and receive CW signals on a specified reference channel number, or on a limited channel number that is less than the specified number, based on information about the position of the mobile terminal 110. In this way, by controlling to transmit and receive CW signals on a limited channel number that is less than the specified reference channel number, the communication occupancy rate can be reduced even in ranging communications in modes 2 and 3. As a result, it becomes possible to further suppress radio interference.
- the communication control unit 52 when ranging communication is to be continued after the location identification unit 53 identifies the location of the mobile terminal 110, the communication control unit 52 again determines the execution mode of the LE-CS ranging to be performed by the anchor 30 based on the latest ranging data. As described above, if the execution mode of the LE-CS ranging is updated based on the latest ranging data, the communication control unit 52 can appropriately switch the execution mode of the LE-CS ranging even if the user carrying the mobile terminal 110 moves. Note that in the fourth embodiment, the near area A1a, the intermediate area A1b, and the far area A1c each correspond to a "terminal area".
- the fifth embodiment of the present disclosure shown in Fig. 23 is a modified example of the fourth embodiment.
- a process of limiting the number of antennas for transmitting and receiving CW signals is performed. Details of the distance measurement communication process of the fifth embodiment will be described below based on Fig. 23 with reference to Figs. 3, 9, and 18. Note that the processes performed in S521 to S526, S530, and S531 are substantially the same as S421 to S426, S430, and S431 in the fourth embodiment (see Fig. 22).
- the communication control unit 52 determines in S527 whether the mobile terminal 110 is present within the unlocked area A1n based on a comparison between the distance to the mobile terminal 110 (distance measurement value) and threshold Th3. If the distance to the mobile terminal 110 is equal to or less than threshold Th3 (S527: NO) and the mobile terminal 110 is present in the unlocked area A1n, the communication control unit 52 determines in S529 to transmit and receive CW signals using the specified number of reference antennas (two). In this case, the anchor 30 performs phase difference ranging using all antennas 31 and 32.
- the communication control unit 52 determines in S528 to limit the number of antennas that transmit and receive the CW signal.
- the anchor 30 transmits and receives the CW signal with a limited number of antennas (one) that is less than the specified reference number of antennas, and performs phase difference ranging using only one anchor antenna.
- distance measurement communication in mode 1 using RTT packets is executed at an appropriate timing, instead of distance measurement communication in modes 2 and 3 using CW signals. Therefore, the same effect as the fourth embodiment is achieved, and it is possible to reduce the communication occupancy rate and, in turn, suppress radio wave interference.
- the anchor 30 has multiple antennas 31, 32 that transmit and receive CW signals. Then, based on information about the location of the mobile terminal 110, the communication control unit 52 determines whether to transmit and receive CW signals using a specified number of reference antennas, or to transmit and receive CW signals using a limited number of antennas that is less than the specified number. As described above, by limiting the number of anchor antennas that transmit and receive CW signals, it is possible to further reduce the communication occupancy rate.
- the sixth embodiment of the present disclosure shown in FIG. 24 is another modified example of the fourth embodiment.
- a process of limiting the number of combinations of communication paths between the anchor 30 and the mobile terminal 110 is performed.
- four communication paths are available between the anchor 30 and the mobile terminal 110 by the combination of two anchor antennas 31, 32 and two terminal antennas 121, 122 (see FIG. 7). That is, four communication paths are the prescribed reference combination number.
- the communication control unit 52 decides to transmit and receive CW signals with a limited combination number that is smaller than the reference combination number. As a result, the use of some of the four communication paths is stopped.
- the communication control unit 52 determines in S627 whether the mobile terminal 110 is present within the unlocked area A1n based on a comparison between the distance to the mobile terminal 110 (distance measurement value) and threshold Th3. If the distance to the mobile terminal 110 is equal to or less than threshold Th3 (S627: NO) and the mobile terminal 110 is present in the unlocked area A1n, the communication control unit 52 determines in S629 to transmit and receive CW signals with the standard number of combinations. In this case, the anchor 30 and the mobile terminal 110 use all four antenna paths to perform phase difference ranging.
- the communication control unit 52 determines in S628 to limit the number of antenna combinations.
- the anchor 30 and the mobile terminal 110 perform phase difference ranging using only some of the antenna paths.
- the sixth embodiment described so far also has the same effect as the fourth embodiment, making it possible to reduce communication occupancy rate and thus suppress radio interference.
- CW signals are transmitted and received between the anchor antennas 31, 32 and the terminal antennas 121, 122.
- a combination of multiple communication paths is set between the anchor antennas 31, 32 and the terminal antennas 121, 122. Then, based on information about the position of the mobile terminal 110, the communication control unit 52 determines whether to transmit and receive CW signals with a specified standard number of combinations, or to transmit and receive CW signals with a limited number of combinations that is less than the specified number.
- the communication occupancy rate As described above, by limiting the combinations of antennas that transmit and receive CW signals, in other words the number of antenna paths, it is possible to further reduce the communication occupancy rate.
- the seventh embodiment of the present disclosure shown in Fig. 25 is yet another modified example of the first embodiment.
- the communication control unit 52 restricts the frequency (number of channels) used by the unnecessary anchor 3D in phase difference ranging.
- the communication control unit 52 sets the number of channels (e.g., 72 channels) used by the unnecessary anchor 3D in phase difference ranging to be less than the number of channels used by the effective anchor 3E in phase difference ranging.
- the communication control unit 52 identifies the terminal area in which the mobile terminal 110 is located based on the results of RSSI ranging or the previous LE-CS ranging in S721 to S724. Furthermore, in S725 to S729, the communication control unit 52 determines an effective anchor 3E from among the multiple anchors 30 based on the information of the identified terminal area and the linking information stored in the information storage unit 51.
- the communication control unit 52 determines the valid anchor 3E and unnecessary anchor 3D corresponding to the driver's side area Aa in S725 and S730. Furthermore, in S730, the frequency used by the unnecessary anchor 3D corresponding to the driver's side area Aa is restricted.
- the communication control unit 52 determines the valid anchor 3E and unnecessary anchor 3D corresponding to the passenger side area Ac in S726 and S731. Furthermore, in S731, the frequency used by the unnecessary anchor 3D corresponding to the passenger side area Ac is restricted.
- the communication control unit 52 determines the valid anchor 3E and unnecessary anchor 3D corresponding to the rear area Ad in S727 and S732. Furthermore, in S732, the frequency used by the unnecessary anchor 3D corresponding to the rear area Ad is restricted.
- the communication control unit 52 determines the valid anchor 3E and unnecessary anchor 3D corresponding to the forward area Ab in S728 and S733. Furthermore, in S733, the frequency used by the unnecessary anchor 3D corresponding to the forward area Ab is restricted.
- the communication control unit 52 determines in S729 the valid anchor 3E and the unnecessary anchor 3D corresponding to the outer area Ae. Furthermore, in S734, the frequency used by the unnecessary anchor 3D corresponding to the outer area Ae is restricted.
- the seventh embodiment described so far also has the same effect as the first embodiment, and by limiting LE-CS ranging by unnecessary anchors 3D, it is possible to reduce the communication occupancy rate and, in turn, suppress radio wave interference.
- the frequency used by the unnecessary anchor 3D in LE-CS ranging is limited as a process for restricting the operation of the unnecessary anchor 3D. In this way, by reducing the frequency used by the unnecessary anchor 3D, it is possible to reduce the communication occupancy rate and, in turn, suppress radio wave interference.
- the communication controller 40 (see FIG. 3) of the anchor 30 is provided with a CS ranging unit as a functional unit for LE-CS ranging.
- the CS ranging unit may be provided in the communication controller of the gateway module 13.
- the CS ranging unit provided in the anchor 30 or the DK-ECU 10 acquires the reception phase for each frequency, for example, by a one-way method.
- the one-way method is a method in which the reception phase of the CW signal transmitted from the mobile terminal 110 is directly adopted as a calculation material for the frequency phase difference, on the premise that the initial phase of the CW signal for each frequency transmitted from the mobile terminal 110 is constant.
- the reception phase (in other words, the single frequency phase difference) used as a calculation material for the frequency phase difference can also be acquired by a passive two-way method, an active two-way method, or the like.
- the passive two-way method and the active two-way method will be described in detail later.
- the CS ranging unit calculates the phase change coefficient ( ⁇ ).
- the phase change coefficient is a parameter that indicates the degree to which the reception phase changes in response to changes in frequency.
- the phase change coefficient can also be called the degree of phase change, the amount of phase shift, or the correlation coefficient between phase and frequency.
- the inter-frequency phase difference can be called the two-frequency phase difference or the quadratic phase difference.
- the inter-frequency phase difference corresponds to the amount of phase angle displacement due to a change in the frequency used.
- the CS ranging unit calculates a regression line L that indicates the relationship between frequency and reception phase based on the reception phase for each frequency, and uses the slope of the regression line L as the phase change coefficient. This is because the slope of the regression line L indicates the amount of change in reception phase relative to the amount of frequency shift.
- the regression line L can also be called an approximation line.
- the CS ranging unit may provisionally calculate a regression line L1 based on all observed received phase data, and may recalculate the regression line L after excluding values (so-called outliers) whose distance from the provisionally calculated regression line L1 is equal to or greater than a predetermined value.
- the phase change coefficient used in distance calculation may be determined based on a regression line whose population is the data excluding the outliers. This configuration may improve the accuracy of the inter-frequency phase difference, and therefore the ranging accuracy.
- the CS ranging unit may calculate the inter-frequency phase difference ( ⁇ ), the differential frequency ( ⁇ f), and the phase change coefficient for each combination of frequencies for which the reception phase can be observed.
- the CS ranging unit may use the average or median of the phase difference change coefficients for each combination of frequencies as the phase difference change coefficient to be used for distance calculation.
- the parameter "C” in the above formula indicates the propagation speed of radio waves (3 ⁇ 10 ⁇ 8 m/sec).
- the CS ranging unit calculates the device distance based on this formula.
- the parameter k in Equation 1 is a design value and is set to 1.0 or 0.5.
- the value of k can be determined depending on whether the transmission and reception phase difference is calculated as a phase change coefficient for one way or a round trip.
- the CS ranging unit stores the calculated device distance data in a memory (memory 42, etc.) in the controller.
- the communication distance calculated by the communication module 33 or the gateway module 13 (hereinafter, the vehicle-mounted wireless module) in the CS ranging process is referred to as the first distance.
- the first distance can also be referred to as the CS ranging value.
- the CS ranging unit may calculate a tentative value (d) of the device distance using ⁇ f and ⁇ for each frequency combination, and use the average or median value of these as the device distance for the antenna being used.
- the vehicle-mounted wireless module can obtain the single-frequency phase difference for each frequency using the active 2-way system or the passive 2-way system, and use this to calculate the phase difference between frequencies.
- the active 2-way system is a system in which an initiator and a reflector transmit and receive CW signals to each other, each detecting the phase difference between the transmitted signal and the received signal, and using these two phase differences to determine the single-frequency phase difference.
- the active 2-way system includes a process in which the initiator and reflector transmit and receive CW signals to each other, and a process in which the reflector transmits the observed received phase ( ⁇ r) to the initiator.
- the initiator is the device that starts communication, in other words, the device that requests a response.
- the reflector is the device that returns the response.
- the anchor 30 or the vehicle-mounted wireless module of the DK-ECU 10 corresponds to the initiator, and the mobile terminal 110 corresponds to the reflector. The correspondence between the initiator and the reflector may be reversed.
- the average value of ⁇ i and ⁇ r is the single frequency phase difference ( ⁇ ) in which the initial phase components of the initiator and reflector are offset.
- the active two-way method corresponds to a method of calculating the average value of the reception phase at the initiator and the reception phase at the reflector as the single frequency phase difference.
- the average value of ⁇ i and ⁇ r is taken as the single frequency phase difference.
- the single frequency phase difference can be calculated as ⁇ i + ⁇ r.
- the passive 2-way system is also a system in which an initiator and a reflector transmit and receive CW signals to each other.
- the difference between the passive 2-way system and the active 2-way system is that the reflector reflects the receiving phase of the CW signal transmitted from the initiator in the initial phase of the transmitted signal and transmits it.
- the receiving phase at the reflector is ⁇ r
- A represents the amplitude.
- n is a natural number and corresponds to the interval from when the reflector receives the CW signal to when it transmits the CW signal.
- the receiving phase observed by the initiator does not include the initial phase component of the reflector.
- the receiving phase observed by the initiator is the same value as when the CW signal is received after being reflected by a reflecting object such as a wall and returned.
- the initiator can calculate the single-frequency phase difference without obtaining the reception phase from the reflector.
- the passive two-way method has the advantage over the active two-way method that the reflector does not need to send a reception phase message.
- the single-frequency phase difference and therefore the inter-frequency phase difference can be calculated in a variety of ways.
- the vehicle key system 100 can execute the distance measurement process sequentially between multiple mobile terminals 110, as shown in Figs. 26 and 27.
- the communication control unit 52 starts communication with the i-th (first) mobile terminal 110 in S101. Furthermore, the communication control unit 52 transmits and receives a CW signal at one frequency in S102. For one frequency, the communication control unit 52 transmits and receives the CW signal by switching between multiple antenna paths in sequence (see the top row of Fig. 27).
- the communication control unit 52 determines whether communication on all channels (e.g., 72 channels) has been completed. If communication on all channels has not been completed (S103: NO), the communication control unit 52 increases the frequency by 1 MHz in S104 and performs communication by CW signals again in S102 (see the middle part of FIG. 27).
- the communication control unit 52 determines in S105 whether communication with all mobile terminals 110 is complete. If there are any mobile terminals 110 with which communication has not been completed (S105: NO), the communication control unit 52 performs processing to switch to communication with the i+1th mobile terminal 110 in S106, and starts communication with the next mobile terminal 110 in S101 (see the lower row of Figure 27). On the other hand, if communication with all mobile terminals 110 is complete (S105: YES), the communication control unit 52 ends the distance measurement processing.
- the method of setting the terminal areas differs from that of the first embodiment.
- a right front area A2a area A-1
- a right rear area A2b area A-2
- a left front area A2d area C-1
- a left rear area A2e area C-2
- a forward area A2c area B
- a rear area A2f area D
- an outer area A2g area E
- linking information linking each terminal area to a valid anchor 3E is stored in the information storage unit 51.
- anchors 30 mounted on the vehicle Hv may be changed as appropriate.
- three anchors 30 are provided on the left, right, and rear of the vehicle Hv as exterior anchors.
- two anchors 30 are provided in a line in the front and rear as interior anchors.
- the vehicle key system 100 of the above embodiment only performs LE communication with the mobile terminal 110.
- the vehicle key system 100 according to the third variation of the above embodiment can further perform ultra-wide band (UWB) communication with the mobile terminal 110 as data communication.
- the gateway module 13 of the DK-ECU 10 performs RSSI ranging by UWB communication.
- information regarding the location of the mobile terminal 110 may be obtained by RSSI ranging by UWB communication.
- a URSK UWB Ranging Secret Key
- the URSK is a key used in UWB ranging communication.
- the URSK can be used to create information that proves that the communication partner in the UWB ranging communication is the correct communication partner.
- the DK-ECU 10 or the mobile terminal 110 After the security of the LE communication is ensured by the owner device registration process, the DK-ECU 10 or the mobile terminal 110 generates the URSK and shares it via the LE communication.
- the DK-ECU 10 stores it in association with the device ID of the mobile terminal 110.
- the DK-ECU 10 is able to perform UWB ranging communication with the mobile terminal 110 as the communication partner. Furthermore, it is preferable for the DK-ECU 10 to use the generated URSK to perform UWB ranging to confirm that UWB ranging communication with the mobile terminal 110 is possible.
- the start and end conditions of UWB ranging communication may be set in the same way as for LE-CS ranging communication.
- the DK-ECU 10 sends a request to start UWB ranging to the anchor 30.
- the DK-ECU 10 sends a request to end UWB ranging to the anchor 30.
- four antenna paths are set by combining two terminal antennas and two anchor antennas.
- the antenna configuration of the mobile terminal 110 and the anchor 30 may be changed as appropriate.
- at least one of the terminal antenna and the anchor antenna may be one.
- three or more terminal antennas and anchor antennas may be provided.
- a sniffer system is applied to the vehicle key system 100 according to the fourth modification of the above embodiment.
- the DK-ECU 10 (gateway module 13) acquires identification information (terminal ID) for identifying the mobile terminal 110 in a process for establishing communication with the mobile terminal 110.
- the DK-ECU 10 provides the anchor 30 with the ID information acquired in the communication with the mobile terminal 110.
- the anchor 30 acquires the terminal ID from the DK-ECU 10 by eavesdropping on the communication between the DK-ECU 10 and the mobile terminal 110. This allows the anchor 30 to perform RTT ranging and phase difference ranging without performing LE communication with the mobile terminal 110 itself. This process may be particularly performed when the frequency of the CW signal is restricted (see S428 in FIG. 22).
- Modification 5 of the first and seventh embodiments as a process for restricting the operation of the unnecessary anchor 3D, the communication control unit 52 restricts the number of anchor antennas 31, 32 that the unnecessary anchor 3D uses in LE-CS ranging. Also, in Modification 6, as a process for restricting the operation of the unnecessary anchor 3D, the communication control unit 52 halts the activation of the unnecessary anchor 3D itself. By restricting the operation of the unnecessary anchor 3D according to Modifications 5 and 6, it is possible to reduce the communication occupancy rate and thus suppress radio wave interference.
- the step of determining whether or not there is previously acquired location information is omitted.
- the configuration may be such that RSSI distance measurement is always performed first.
- the DK-ECU 10 is configured as an independent electronic control device.
- the functions related to the digital key implemented in the DK-ECU 10 are integrated with another ECU configured to realize other functions.
- the other ECU may be a central control device (integrated ECU) equipped with a high-performance processor and playing a central role in the electronic platform of the vehicle Hv by integrating and controlling a large number of vehicle ECUs.
- the central control device corresponds to the "position determination device" and "control device”
- the vehicle key system including the central control device corresponds to the "position determination system.”
- each function provided by the processing circuit 50 can be provided by software and hardware that executes it, software alone, hardware alone, or a combination of these. Furthermore, when such functions are provided by electronic circuits as hardware, each function can also be provided by digital circuits including multiple logic circuits, or analog circuits.
- Each processor in the above embodiments is hardware for arithmetic processing coupled to a RAM.
- the processing unit includes at least one arithmetic core such as a CPU (Central Processing Unit) and a GPU (Graphics Processing Unit).
- a processing unit including a processor may further include an FPGA (Field-Programmable Gate Array), an NPU (Neural network Processing Unit), and IP cores with other dedicated functions.
- the processing unit may also be individually implemented on a printed circuit board, or may be implemented in an ASIC (Application Specific Integrated Circuit) and an FPGA, etc.
- the storage medium non-transitory tangible storage medium
- the storage medium is not limited to a configuration in which it is provided on a circuit board, and may be provided in the form of a memory card or the like, inserted into a slot portion, and electrically connected to the processing circuit.
- the storage medium may be an optical disk, hard disk drive, solid state drive, or the like that is the source from which the program is copied or distributed to the processing circuit, etc.
- Vehicles equipped with the above-mentioned onboard key system are not limited to general private passenger cars (Personally Owned Vehicles, POVs). Vehicles equipped with the onboard key system may be rental cars, manned taxi cars, ride-sharing cars, freight cars, buses, etc. Furthermore, vehicles equipped with the onboard key system 100 may be right-hand drive vehicles or left-hand drive vehicles. The shape of the terminal area may be changed as appropriate depending on the position of the steering wheel of the vehicle Hv. Furthermore, the onboard key system is not limited to four-wheeled automobiles, and may be installed in various moving bodies such as two-wheeled automobiles (motorcycles), ships, airplanes, railroad cars, construction machinery, etc.
- control unit and the method described in the present disclosure may be realized by a dedicated computer comprising a processor programmed to execute one or more functions embodied in a computer program.
- the device and the method described in the present disclosure may be realized by a dedicated hardware logic circuit.
- the device and the method described in the present disclosure may be realized by one or more dedicated computers configured by a combination of a processor that executes a computer program and one or more hardware logic circuits.
- the computer program may be stored on a computer-readable non-transient tangible recording medium as instructions executed by the computer.
- a position determination system including a plurality of anchors (30) that perform distance measurement communication to measure a distance between the anchors and a mobile terminal (110), and a control device (10) that controls the plurality of anchors, The anchor performs channel sounding ranging via Bluetooth Low Energy communication to obtain ranging data related to phase difference or time of flight;
- a processing circuit (50) provided in at least one of the anchor or the control device, a communication control unit (52) that determines an effective anchor from among the plurality of anchors based on information regarding the location of the mobile terminal, and limits the channel sounding distance measurement of unnecessary anchors that are the anchors other than the effective anchor; a location identification unit (53) that identifies a location of the mobile terminal based on the distance measurement data of the valid anchors;
- a position determining system including: (Technical thought 2) The control device identifies a terminal area in which the mobile terminal is located based on a strength value related to radio wave strength of the Bluetooth Low Energy communication; The position determination system according to Technical Idea 1, wherein the communication control
- the communication control unit Identifying a terminal area where the mobile terminal is located based on the distance measurement data; The position determination system according to technical idea 1 or 2, which determines the valid anchor from among the plurality of anchors based on information on the terminal area identified using the ranging data.
- the processing circuit further includes an information storage unit (51) that stores linking information linking the terminal area with the valid anchor, The position determination system according to Technical Idea 2 or 3, wherein the communication control unit determines the effective anchor corresponding to the terminal area based on the association information.
- the communication control unit Calculating a moving speed of the mobile terminal based on the distance measurement data from the plurality of anchors; A position determination system according to any one of technical ideas 2 to 4, in which the valid anchors are determined based on the moving speed in addition to the terminal area.
- the communication control unit Calculating a moving direction of the mobile terminal based on the distance measurement data from the plurality of anchors; A position determination system according to any one of technical ideas 2 to 5, in which the valid anchors are determined based on the direction of movement in addition to the terminal area.
- the communication control unit is a location determination system described in any one of Technical Ideas 1 to 7, in which, as a process of restricting the operation of the unnecessary anchor, the communication control unit restricts the frequency used by the unnecessary anchor in the channel sounding ranging, or restricts the number of antennas (31, 32) used by the unnecessary anchor in the channel sounding ranging.
- a position determination system including a plurality of anchors (30) that perform distance measurement communication to measure a distance between the anchors and a mobile terminal (110), and a control device (10) that controls the plurality of anchors,
- the anchor includes at least a first mode for transmitting and receiving an RTT packet for calculating a time of flight of a signal, and a second mode for transmitting and receiving a CW signal for calculating a phase of the signal, in an execution mode of channel sounding ranging by Bluetooth Low Energy communication;
- a processing circuit (50) provided in at least one of the anchor or the control device, a communication control unit (52) that determines the execution mode to be executed by the anchor from the first mode and the second mode based on information regarding the location of the mobile terminal; a location identification unit (53) that identifies a location of the mobile terminal based on distance measurement data acquired in the execution mode determined by the communication control unit;
- a position determining system including: (Technical Thought 13) The control device identifies a terminal area in which the mobile
- the communication control unit Identifying a terminal area where the mobile terminal is located based on the distance measurement data; A position determination system according to technical idea 12 or 13, which determines the execution mode to be executed by the anchor from the first mode and the second mode based on information on the terminal area identified using the ranging data.
- the anchor transmits and receives the CW signal on a plurality of channels in the second mode; A location determination system described in any one of technical ideas 12 to 14, in which the communication control unit determines whether to transmit and receive the CW signal using a specified reference channel number or a limited channel number that is less than the specified number, based on information regarding the location of the mobile terminal.
- the anchor has a plurality of antennas (31, 32) for transmitting and receiving the CW signal, A location determination system described in any one of technical ideas 12 to 15, in which the communication control unit determines whether to transmit and receive the CW signal using a specified reference number of antennas or a limited number of antennas that is less than the specified number, based on information regarding the location of the mobile terminal.
- the anchor antenna transmits and receives the CW signal to and from at least one terminal antenna (121, 122) provided in the mobile terminal,
- the position determination system according to technical idea 16, wherein the communication control unit determines whether to transmit and receive the CW signal with a specified standard number of combinations of communication paths between the anchor antenna and the terminal antenna, or with a limited number of combinations that is less than the specified number, based on information regarding the position of the mobile terminal.
- the communication control unit when continuing the ranging communication after the position identification unit identifies the position of the mobile terminal, again determines the execution mode to be executed by the anchor based on the latest ranging data.
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Mobile Radio Communication Systems (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025561915A JPWO2025121358A1 (https=) | 2023-12-07 | 2024-12-04 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023206918 | 2023-12-07 | ||
| JP2023-206918 | 2023-12-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025121358A1 true WO2025121358A1 (ja) | 2025-06-12 |
Family
ID=95981041
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/042905 Pending WO2025121358A1 (ja) | 2023-12-07 | 2024-12-04 | 位置判定システム、位置判定装置、及び位置判定方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025121358A1 (https=) |
| WO (1) | WO2025121358A1 (https=) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1075481A (ja) * | 1996-05-08 | 1998-03-17 | Fuji Xerox Co Ltd | セルラ通信網 |
| JP2006138732A (ja) * | 2004-11-12 | 2006-06-01 | Hitachi Ltd | 無線位置検出方法 |
| JP2007147350A (ja) * | 2005-11-25 | 2007-06-14 | Hitachi Ltd | 無線通信測位システム |
| KR20110112094A (ko) * | 2010-04-06 | 2011-10-12 | 주식회사 케이티 | 근거리 통신을 위한 액세스 포인트를 이용한 위치 측정 방법 및 장치 |
| JP2018195981A (ja) * | 2017-05-17 | 2018-12-06 | 株式会社Nttドコモ | デバイス位置管理システム及びデバイス位置管理サーバ |
| CN110972263A (zh) * | 2019-12-26 | 2020-04-07 | 上海载德信息科技股份有限公司 | 定位方法、装置、计算机设备以及计算机可读存储介质 |
| WO2022024275A1 (ja) * | 2020-07-29 | 2022-02-03 | 日本電信電話株式会社 | 無線端末装置の位置推定システム、位置推定装置、位置推定方法および位置推定プログラム |
| WO2023120307A1 (ja) * | 2021-12-21 | 2023-06-29 | 株式会社デンソー | 位置判定装置、位置判定方法、車両用電子キーシステム |
| US20230244994A1 (en) * | 2022-02-03 | 2023-08-03 | Denso Corporation | Machine learning generation for real-time location |
| WO2023204120A1 (ja) * | 2022-04-22 | 2023-10-26 | 株式会社デンソー | 位置推定システムおよび位置推定方法 |
-
2024
- 2024-12-04 JP JP2025561915A patent/JPWO2025121358A1/ja active Pending
- 2024-12-04 WO PCT/JP2024/042905 patent/WO2025121358A1/ja active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1075481A (ja) * | 1996-05-08 | 1998-03-17 | Fuji Xerox Co Ltd | セルラ通信網 |
| JP2006138732A (ja) * | 2004-11-12 | 2006-06-01 | Hitachi Ltd | 無線位置検出方法 |
| JP2007147350A (ja) * | 2005-11-25 | 2007-06-14 | Hitachi Ltd | 無線通信測位システム |
| KR20110112094A (ko) * | 2010-04-06 | 2011-10-12 | 주식회사 케이티 | 근거리 통신을 위한 액세스 포인트를 이용한 위치 측정 방법 및 장치 |
| JP2018195981A (ja) * | 2017-05-17 | 2018-12-06 | 株式会社Nttドコモ | デバイス位置管理システム及びデバイス位置管理サーバ |
| CN110972263A (zh) * | 2019-12-26 | 2020-04-07 | 上海载德信息科技股份有限公司 | 定位方法、装置、计算机设备以及计算机可读存储介质 |
| WO2022024275A1 (ja) * | 2020-07-29 | 2022-02-03 | 日本電信電話株式会社 | 無線端末装置の位置推定システム、位置推定装置、位置推定方法および位置推定プログラム |
| WO2023120307A1 (ja) * | 2021-12-21 | 2023-06-29 | 株式会社デンソー | 位置判定装置、位置判定方法、車両用電子キーシステム |
| US20230244994A1 (en) * | 2022-02-03 | 2023-08-03 | Denso Corporation | Machine learning generation for real-time location |
| WO2023204120A1 (ja) * | 2022-04-22 | 2023-10-26 | 株式会社デンソー | 位置推定システムおよび位置推定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025121358A1 (https=) | 2025-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210358236A1 (en) | Vehicular position estimation system | |
| JP7697343B2 (ja) | 車両用電子キーシステム、車両用認証装置 | |
| JP7844831B2 (ja) | 位置判定システム、位置判定方法 | |
| US12570237B2 (en) | Position determination device, position determination method, and vehicular electronic key system | |
| US20210011143A1 (en) | Distance measurement system | |
| WO2019198331A1 (ja) | 車両用電子キーシステム | |
| WO2020158308A1 (ja) | 車両用位置推定システム | |
| JP7280108B2 (ja) | 位置推定装置、位置推定システム及び位置推定方法 | |
| US9266503B2 (en) | Vehicular control system and portable terminal | |
| JP2011147104A (ja) | 通信端末位置判定装置 | |
| EP4632423A1 (en) | Position assessment device, position assessment system, wireless communication module, and computer program | |
| US20250058741A1 (en) | Vehicle control system, vehicle control program, and position confirmation device | |
| CN119364280A (zh) | 基于路径的被动进入 | |
| WO2025121358A1 (ja) | 位置判定システム、位置判定装置、及び位置判定方法 | |
| JP7438675B2 (ja) | 位置判定システム及び位置判定方法 | |
| JP2020088436A (ja) | 位置判定システム及び位置判定システムの制御方法 | |
| WO2022024658A1 (ja) | 制御装置およびシステム | |
| WO2025121357A1 (ja) | 位置検出システム、位置検出方法、及びコンピュータ | |
| WO2021261420A1 (ja) | 位置判定システム | |
| WO2025126924A1 (ja) | 通信接続管理システム、通信接続管理方法、及びコンピュータ | |
| JP2024112120A (ja) | 位置判定装置、位置判定システム | |
| US20250271535A1 (en) | Wireless communication device and board | |
| WO2026028786A1 (ja) | 位置判定装置、位置判定システム、位置判定方法 | |
| WO2025053137A1 (ja) | 位置判定システム、位置判定方法 | |
| WO2020100941A1 (ja) | 位置判定システム及び位置判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24900652 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025561915 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025561915 Country of ref document: JP |