WO2025121356A1 - 位置検出システム、位置検出方法、及びコンピュータ - Google Patents
位置検出システム、位置検出方法、及びコンピュータ Download PDFInfo
- Publication number
- WO2025121356A1 WO2025121356A1 PCT/JP2024/042903 JP2024042903W WO2025121356A1 WO 2025121356 A1 WO2025121356 A1 WO 2025121356A1 JP 2024042903 W JP2024042903 W JP 2024042903W WO 2025121356 A1 WO2025121356 A1 WO 2025121356A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- communication
- portable device
- uwb
- signal
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/24—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/02—Systems for determining distance or velocity not using reflection or reradiation using radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/82—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein continuous-type signals are transmitted
- G01S13/84—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein continuous-type signals are transmitted for distance determination by phase measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
Definitions
- This disclosure relates to a technology for detecting the position of a mobile device relative to an object by wirelessly communicating with the mobile device.
- Patent Document 1 discloses a vehicle control device that can accurately measure the distance between a vehicle and a mobile terminal while reducing power consumption.
- Bluetooth registered trademark, the same applies below
- Low Energy (LE) communication Bluetooth LE communication is executed between the vehicle and the mobile terminal.
- the mobile terminal transmits terminal position information, including the current position information of the mobile terminal detected by the terminal GPS sensor, to the vehicle.
- the vehicle control device measures the vehicle-terminal distance with relatively low accuracy based on the received terminal position information and the current position of the vehicle detected by the vehicle GPS sensor.
- the vehicle control device measures the vehicle-terminal distance with relatively high accuracy by performing ultra-wideband (UWB) communication only when it recognizes that the mobile terminal is approaching the vehicle from the time series data of the measured vehicle-terminal distance.
- UWB ultra-wideband
- the device of Patent Document 1 does not anticipate any situation in which UWB communication, a communication method capable of measuring the distance between vehicles and terminals with relatively high accuracy, cannot be used as normal. For example, in some countries, the use of UWB communication outdoors may be restricted. Also, if one of the multiple antennas or communication devices for UWB communication installed on the vehicle breaks down, normal UWB communication signals cannot be obtained, and it may not be possible to measure the distance between vehicles and terminals with relatively high accuracy. Therefore, there is a problem in that it becomes difficult to detect the position of the mobile terminal when a situation arises in which UWB communication, which can measure the distance between vehicles and terminals with relatively high accuracy, cannot be used as normal.
- the present disclosure has been made in consideration of the above-mentioned points, and aims to provide a position detection system, a position detection method, and a computer that are capable of detecting the position of a mobile terminal relative to an object even when it is difficult to use a first communication unit that wirelessly communicates with a mobile device using a first communication method that enables highly accurate positioning.
- a position detection system for detecting a position of a mobile device relative to an object, comprising: a first communication unit that is installed on the object and that performs wireless communication with the portable device in a first communication method; a second communication unit that is installed on the object and that performs wireless communication with the portable device in a second communication method different from the first communication method; a computer that executes a process to determine a position of the portable device relative to an object based on a first communication signal wirelessly communicated between the first communication unit and the portable device and/or a second communication signal wirelessly communicated between the second communication unit and the portable device;
- the first communication method is ultra-wideband (UWB) communication;
- the computer a determination unit that determines whether or not wireless communication with the portable device can be performed using the first communication unit;
- the device is configured to have a determination unit that, when the determination unit determines that wireless communication with the portable device cannot be performed using the first communication unit, determines the position of the portable device
- the present disclosure also provides a location detection method for detecting a location of a mobile device relative to an object, the method comprising: acquiring at least one of a first communication signal wirelessly communicated in a first communication method between a first communication unit installed in the object and the portable device, and a second communication signal wirelessly communicated in a second communication method different from the first communication method between a second communication unit installed in the object and the portable device;
- the first communication method is ultra-wideband communication, determining whether wireless communication with the portable device can be performed using the first communication unit; and if it is determined that wireless communication with the portable device cannot be performed using the first communication unit, determining a position of the portable device relative to an object using a second communication signal.
- a computer is a computer that performs processing for detecting a position of a mobile device relative to an object, the computer is configured to be capable of acquiring a first communication signal wirelessly communicated in a first communication method between a first communication unit installed in the object and the portable device, and a second communication signal wirelessly communicated in a second communication method different from the first communication method between a second communication unit installed in the object and the portable device,
- the first communication method is ultra-wideband communication
- the computer a determination unit that determines whether or not wireless communication with the portable device can be performed using the first communication unit;
- the device is configured to have a determination unit that, when the determination unit determines that wireless communication with the portable device cannot be performed using the first communication unit, determines the position of the portable device relative to the object using the second communication signal.
- the position detection system, position detection method, and computer disclosed herein determine whether or not wireless communication with the portable device can be performed using the first communication unit. If it is determined that wireless communication with the portable device cannot be performed using the first communication unit, the position of the portable device relative to the target object is determined using a second communication signal wirelessly communicated between the second communication unit and the portable device in a second communication method. Therefore, even if the first communication unit, which wirelessly communicates with the portable device in the first communication method, cannot be used normally, it is possible to detect the position of the portable terminal relative to the target object by using the second communication signal.
- FIG. 1 is a diagram showing an overall view of a vehicle electronic key system to which a position detection system is applied.
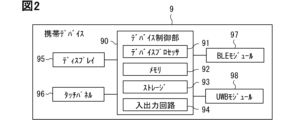
- FIG. 2 is a block diagram showing a configuration of a portable device.
- FIG. 1 is a block diagram showing a configuration of an in-vehicle system.
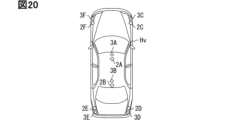
- FIG. 1 is a diagram showing an example of the arrangement of a BLE module and a UWB module in a vehicle.
- FIG. 2 is a block diagram showing the configuration of a BLE module.
- FIG. 13 is a diagram illustrating a flow of a CS ranging process.
- 10 is a diagram for explaining the operation of the portable device and the in-vehicle system when the portable device and the in-vehicle system are not yet communicatively connected.
- FIG. 1 is a diagram showing an overall view of a vehicle electronic key system to which a position detection system is applied.
- FIG. 2 is a block diagram showing a configuration of a portable device.
- FIG. 1 is a block diagram
- FIG. 1 is a diagram for explaining the operation of a portable device and an in-vehicle system when the portable device and the in-vehicle system perform CS ranging communication.
- 1 is a diagram for explaining the operation of a portable device and an in-vehicle system when the portable device and the in-vehicle system perform UWB ranging communication.
- FIG. 2 is a functional block diagram of a main controller.
- 11 is a diagram showing an example of areas that are set inside and outside a vehicle in order to determine whether the location of a device belongs to an area.
- 1 is a flowchart showing a process executed in an in-vehicle system for locating a mobile device implemented using either a BLE module or a UWB module.
- 11 is a diagram showing an example of each area when detecting whether the location of a mobile device belongs to an area using a BLE module.
- FIG. 11 is a flowchart illustrating an example of a process for determining a method for measuring a distance to a mobile device.
- FIG. 13 is a flowchart showing a process for detecting the position of a mobile device, which is executed in an in-vehicle system according to a second embodiment and is implemented using either a BLE module or a UWB module.
- 11 is a diagram showing whether UWB ranging communication with a mobile device is possible when one of the UWB modules fails.
- 13 is a flowchart showing a process for detecting the position of a mobile device, which is executed in an in-vehicle system according to a third embodiment, using either or both of a BLE module and a UWB module.
- 1 is a flow chart showing a process for periodically performing both CS ranging and UWB ranging.
- FIG. 13 is a diagram showing a configuration of a modified example.
- the electronic key system for a vehicle includes an in-vehicle system VS and a portable device 9.
- the in-vehicle system VS includes an ECU 1.
- ECU is an abbreviation for Electronic Control Unit and means an electronic control device.
- the ECU 1 can also be referred to as a computer, a microcomputer, a processor, or the like.
- the ECU 1 is configured to be able to perform wireless communication compliant with Bluetooth LE (hereinafter, BLE communication) with a portable device 9 carried by a user of the vehicle Hv.
- BLE communication Bluetooth LE
- a case will be described in which the ECU 1 is configured to act as a master in BLE communication with the portable device 9, and the portable device 9 is configured to act as a slave.
- master can be read as "central” or "scanner.”
- slave can be read as "peripheral” or "advertiser.”
- the ECU 1 establishes a communication connection with the portable device 9 by receiving an advertising signal from the portable device 9.
- the advertising signal is a signal for notifying (i.e., advertising) the presence of the ECU 1 to other devices.
- the advertising signal may include a code indicating the sender or destination.
- the sender or destination may be expressed by an identifier such as a device ID.
- the vehicle electronic key system may be configured so that the portable device 9 operates as a master in communication with the ECU 1, and the ECU 1 acts as a slave.
- the roles of each device are interchangeable.
- the functions and configurations of the ECU 1 and the portable device 9 may be changed as appropriate in accordance with the role exchange.
- a wireless signal that complies with the BLE standard is referred to as a BLE signal.
- an advertisement channel signal may be referred to as an advertisement signal
- a data channel signal may be referred to as a data signal.
- channels with channel numbers 37 to 39 correspond to advertisement channels.
- channels with channel numbers 0 to 36 correspond to data channels.
- the definitions of advertisement channels and data channels and the specific frequency values are determined according to the BLE standard.
- the configuration of this disclosure may be modified as appropriate to comply with the modified standard.
- the in-vehicle system VS and the portable device 9 are also configured to be capable of UWB communication, which is wireless communication using the UWB-IR (Ultra Wide Band - Impulse Radio) method.
- the in-vehicle system VS and the portable device 9 are configured to be capable of transmitting and receiving impulse-shaped radio waves (hereinafter, impulse signals) used in UWB communication.
- impulse signals used in UWB communication is a signal that has an extremely short pulse width (e.g., 2 ns) and a bandwidth of approximately 500 MHz or more (i.e., ultra-wide bandwidth).
- the in-vehicle system VS can communicate with the portable device 9 using the fifth channel of UWB communication.
- the in-vehicle system VS can be configured to be able to communicate with the portable device 9 using other channels such as the third channel and the ninth channel.
- the third channel is a channel with a center frequency of 4492 MHz
- the fifth channel is a channel with a center frequency of 6489.6 MHz
- the ninth channel is a channel with a center frequency of 7987.2 MHz.
- IEEE registered trademark
- GHz Global System for Mobile Communications
- UWB communication A variety of modulation methods can be used for UWB communication, including on-off keying (OOK), pulse position modulation (PPM), and pulse width modulation (PWM).
- OOK on-off keying
- PPM pulse position modulation
- PWM pulse width modulation
- the on-off modulation method expresses information (e.g., 0 and 1) by the presence/absence of an impulse signal.
- the pulse position modulation method modulates at the position where the pulse is generated.
- the pulse width modulation method expresses information by the pulse width.
- UWB communication between the in-vehicle system VS and the portable device 9 is carried out by the OOK method.
- Data transmission by UWB communication can be achieved using multiple impulse signals.
- the data signal exchanged by UWB communication will be referred to as a UWB signal. Since the UWB signal contains multiple impulse signals, it can also be called a pulse sequence signal.
- the portable device 9 is a portable and general-purpose information processing terminal equipped with a BLE communication function and a UWB communication function.
- various communication terminals such as a smartphone and a wearable device can be adopted.
- a wearable device is a device that is worn on the user's body and can be of various shapes such as a wristband type, a watch type, a finger ring type, a glasses type, and an earphone type.
- the portable device 9 can also be called a user device, a key device, or the like.
- the portable device 9 may be a smart key, which is a dedicated device as an electronic key for the vehicle Hv.
- the smart key is a device that is transferred to the owner together with the vehicle Hv when the vehicle Hv is purchased.
- the smart key can be considered as one of the accessories of the vehicle Hv.
- the smart key can be called a vehicle portable device, a key fob, a key card, an access key, etc.
- the portable device 9 includes a device control unit 90, a display 95, a touch panel 96, a BLE module 97, and a UWB module 98.
- the device control unit 90 is a module that controls the operation of the entire portable device 9.
- the device control unit 90 is configured as a computer including, for example, a device processor 91, a memory 92, a storage 93, an input/output circuit 94, etc.
- the device processor 91 is, for example, a CPU (Central Processing Unit).
- the memory 92 is a volatile storage medium such as a RAM (Random Access Memory).
- the storage 93 includes a non-volatile storage medium such as a flash memory.
- the input/output circuit 94 is a circuit that enables the device control unit 90 to receive signals from other components within the portable device 9 and output signals to other components.
- Storage 93 may store a device ID, a key code used in wireless authentication processing with ECU 1, and the like.
- the key code may also be called an encryption key, for example.
- a digital key app which is application software for causing mobile device 9 to function as a vehicle key, may be installed in storage 93.
- the digital key app is an app for implementing secure communication with ECU 1 and responding to inquiries/requests from ECU 1.
- application software may be referred to simply as an app.
- the display 95 is, for example, a liquid crystal display or an organic EL display.
- the display 95 displays an image according to an input signal from the device control unit 90.
- the touch panel 96 is, for example, a capacitive touch panel, and is layered on the display 95.
- the touch panel 96 is an input device provided in the portable device 9.
- the display 95 and the touch panel 96 correspond to an interface through which the user inputs a password into the portable device 9 for logging in to the digital key app, and inputs operations for pairing the portable device 9 with the ECU 1.
- the BLE module 97 is a communication module for performing BLE communication.
- the BLE module 97 has a reception strength detection unit, which is a functional unit that measures the reception strength of a received signal.
- the measured value of the reception strength may also be called RSSI (Received Signal Strength Indicator).
- RSSI Receiveived Signal Strength Indicator
- the BLE module 97 outputs data indicating the measured reception strength together with transmission source information to the device control unit 90.
- the BLE module 97 may be configured to transmit and receive a continuous wave (CW) signal of a predetermined waveform as a signal for CS (Channel Sounding) ranging, described later, in addition to a modulated signal for data communication.
- the CW signal may be a sine wave or a triangular wave.
- the BLE module 97 may have a configuration similar to the BLE module 2, described later, which is provided in the in-vehicle system VS.
- the BLE module 97 may be configured in part or in whole with respect to the description of the BLE module 2.
- the UWB module 98 is a communication module for performing UWB communication.
- the UWB module 98 outputs received data to the device control unit 90.
- the UWB module 98 also transmits a UWB signal corresponding to the transmission data based on instructions from the device control unit 90.
- the UWB module 98 can also transmit a UWB signal for distance measurement based on instructions from the device control unit 90. The operation of the UWB module 98 is controlled by the device control unit 90.
- the device control unit 90 causes the BLE module 97 to transmit an advertising signal at a predetermined transmission interval in order to start BLE communication with the ECU 1. Furthermore, the device control unit 90 establishes a BLE communication connection with the vehicle Hv (ECU 1) based on the BLE module 97 receiving a connection request transmitted from the ECU 1 in response to the advertising signal.
- the device control unit 90 may perform authentication processing by wireless communication (hereinafter, wireless authentication processing) based on the establishment of a communication connection with the ECU 1.
- the wireless authentication processing may be performed, for example, by a challenge-response method.
- the device control unit 90 may generate a response code using a key code in response to receiving a challenge code from the ECU 1, and send it back to the ECU 1.
- the device control unit 90 executes communication for CS ranging based on a request from the ECU 1. For example, based on a request from the ECU 1, the device control unit 90 causes the BLE module 97 to transmit a CW signal of a specified channel (or frequency). The interaction between the device control unit 90 and the ECU 1 will be described separately later.
- the device control unit 90 when the device control unit 90 receives a UWB signal transmitted from the in-vehicle system VS, it returns a response signal corresponding to the received signal via the UWB module 98.
- the device control unit 90 when the device control unit 90 receives a UWB signal as a search signal, it can return a UWB signal modulated with a code including the device ID of the portable device 9 to the in-vehicle system VS as a response signal.
- the search signal is a signal used by the in-vehicle system VS to search for the portable device 9, and is a type of signal that requests the portable device 9 to return a response signal.
- the UWB signals transmitted by the portable device 9 and the in-vehicle system VS may include a code indicating the sender or destination.
- the device control unit 90 When the device control unit 90 is not connected for communication with the ECU 1, the device control unit 90 causes the BLE module 97 to periodically transmit an advertising signal at a predetermined advertising interval. On the other hand, when the device control unit 90 is not connected for BLE communication with the ECU 1, the device control unit 90 stops the operation of the UWB module 98. When a BLE communication connection with the ECU 1 is established, the device control unit 90 starts up the UWB module 98, making it possible to perform UWB communication. This configuration reduces the power consumption of the UWB module 98.
- the device control unit 90 may be configured to start the UWB module 98 on the condition that a UWB ranging start request is received from the ECU 1 via BLE communication after a BLE communication connection with the ECU 1 is established.
- the UWB ranging start request is a BLE signal requesting the start of UWB ranging processing.
- the UWB module 98 often consumes more power than the BLE module 97. Therefore, by reducing the time that the UWB module 98 is activated, further power saving effects can be expected.
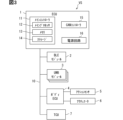
- the in-vehicle system VS includes an ECU 1, a BLE module 2, a plurality of UWB modules 3, a body ECU 4, an action sensor 5, an actuator 6, and a telematics control unit (TCU) 7.
- the ECU 1, the BLE module 2, the plurality of UWB modules 3, the body ECU 4, and the TCU 7 are connected to each other so as to be able to communicate with each other via, for example, an in-vehicle network.
- various standards such as Controller Area Network (CAN: registered trademark), Ethernet (registered trademark), and FlexRay (registered trademark) can be adopted.
- the ECU 1 executes a process for determining the position of the portable device 9 relative to the vehicle Hv based on the BLE signal (more specifically, the RSSI of the BLE signal and the CS ranging result) communicated between the BLE module 2 of the in-vehicle system VS and the BLE module 97 of the portable device 9, and/or the UWB signal (more specifically, the UWB ranging result) communicated between the UWB module 3 of the in-vehicle system VS and the UWB module 98 of the portable device 9.
- the BLE signal more specifically, the RSSI of the BLE signal and the CS ranging result
- the ECU 1 detects the position of the portable device 9 by determining whether the portable device 9 is located in an entry area EA outside the vehicle or in an engine start area ESA inside the vehicle based on the UWB signals communicated between the multiple UWB modules 3 and the portable device 9. Since the portable device 9 corresponds to a user, detecting the device position is equivalent to detecting the user's position.
- the ECU 1 includes a main controller 11, a CAN controller 15, and a power supply circuit 16.
- the main controller 11 is a computer that executes various processes related to detecting the position of the portable device 9.
- the main controller 11 includes a main processor 12, a memory 13, and a storage 14.
- the main processor 12 is, for example, a CPU that executes predetermined processes according to software.
- the memory 13 is a volatile storage medium, for example, a RAM.
- the storage 14 includes a non-volatile storage medium such as a flash memory.
- the storage 14 stores a device location detection program executed by the main processor 12.
- the execution of the device location detection program by the main processor 12 corresponds to the execution of a location detection method corresponding to the device location detection program.
- the storage 14 also stores the device ID (e.g., a unique Bluetooth address) of the portable device 9.
- the storage 14 also stores data indicating the mounting positions of the BLE module 2 and each UWB module 3 in the vehicle Hv.
- the CAN controller 15 executes communication processing according to the CAN protocol with other components of the in-vehicle system VS in response to instructions from the main controller 11, etc.
- the CAN controller 15 executes transmission processing, reception processing, and arbitration processing as communication processing.
- the CAN controller 15 executes reception processing when a data frame is stored in the reception buffer.
- the reception processing includes a process of determining whether or not the received data frame is an invalid data frame that has been corrupted, etc., through a form check, a stuff check, a cyclic redundancy check, etc.
- the CAN controller 15 determines whether or not a response signal received in response to a request to transmit UWB ranging results, for example, corresponds to the above-mentioned invalid data frame. If it is determined that the data frame corresponds to an invalid data frame, it assumes that some kind of malfunction has occurred in the UWB module 3 that transmitted the request signal, and reports this to the main controller 11. Furthermore, for example, if the CAN controller 15 transmits a request signal to the UWB module 3 but does not receive a response signal within a specified time, it may assume that some kind of malfunction has occurred in the UWB module 3 that transmitted the request signal, and report this to the main controller 11.
- the power supply circuit 16 is a circuit module that supplies power to the main controller 11, the CAN controller 15, etc.
- the power supply circuit 16 converts the voltage (e.g., battery voltage) input from the power cable into a voltage suitable for the operation of the main controller 11 and the CAN controller 15, and outputs it to each part.
- the BLE module 2 is a communication module for performing BLE communication.
- one BLE module 2 is provided in the vehicle Hv.
- Multiple BLE modules 2 may be provided in the vehicle Hv.
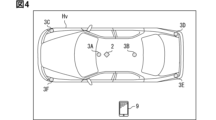
- the BLE module 2 is arranged, for example, in the vehicle cabin as shown in FIG. 4.
- the BLE module 2 is configured to be capable of transmitting and receiving a CW signal for each channel (or frequency) as a signal for CS ranging, in addition to a modulated signal for data communication.
- the BLE module 2 is configured to be capable of scanning advertising signals using power supplied from an on-board battery, even while the vehicle Hv is parked.
- the UWB module 3 is a communication module for performing UWB communication. As shown in FIG. 4, multiple UWB modules 3A to 3F are provided in the vehicle Hv. Each UWB module 3 provided in the vehicle Hv is configured to be able to transmit and receive UWB signals, similar to the UWB module 98 provided in the portable device 9. Each UWB module 3, which will be described in detail later, performs UWB communication for distance measurement with the portable device 9 when the ECU 1 determines that wireless communication with the portable device 9 is possible. Through this UWB communication, the distance from each UWB module 3 to the portable device 9 (device distance) is measured, and the position of the portable device 9 is detected based on this measured distance. Each UWB module 3 is also called an anchor or a reference station.
- Each UWB module 3 is equipped with an antenna for UWB communication, a transmission/reception circuit, a UWB controller, etc.
- the transmission/reception circuit is a circuit that performs signal processing for modulation and demodulation.
- the UWB controller is a microcomputer that controls the operation of the UWB module 3 and generates UWB ranging data, which is explained next.
- Each UWB module 3 performs UWB ranging processing based on instructions from the ECU 1.
- the UWB ranging processing is a process for measuring the device distance based on the propagation time (in other words, the flight time) of radio waves from the UWB module 3 to the portable device 9.
- the UWB ranging processing includes a process for transmitting a UWB signal of a predetermined pattern toward the portable device 9, and a process for receiving a UWB signal as a response signal from the portable device 9.
- the UWB signal exchanged between the UWB module 3 and the portable device 9 in the UWB ranging processing may be a single impulse signal, or a pulse sequence signal in which multiple impulse signals are arranged in a predetermined pattern.
- the UWB controller measures the round trip time (RTT), which is the time elapsed from transmitting a UWB signal to receiving a response signal from the portable device 9, and calculates the device distance based on the RTT.
- RTT corresponds to the round trip flight time of the UWB signal.
- the UWB controller of this embodiment calculates the device distance by multiplying half the value obtained by subtracting a predetermined correction value from the RTT by the propagation time of the radio waves.
- the correction value here is a parameter for offsetting the response processing time in the portable device 9 and the delay time within the UWB module 3.
- the specific value of the correction value can be designed as appropriate.
- the UWB module 3 transmits the calculated device distance to the ECU 1 as UWB ranging data.
- the process of converting the RTT to distance may be performed by the main controller 11.
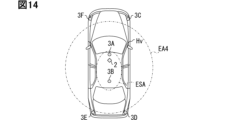
- the in-vehicle system VS includes a plurality of UWB modules 3, for example, an in-vehicle front anchor 3A, an in-vehicle rear anchor 3B, a right-side front anchor 3C, a right-side rear anchor 3D, a left-side rear anchor 3E, and a left-side rear anchor 3F.
- the in-vehicle front anchor 3A and the in-vehicle rear anchor 3B are all UWB modules 3 arranged inside the vehicle cabin.
- the right-side front anchor 3C, the right-side rear anchor 3D, the left-side rear anchor 3E, and the left-side rear anchor 3F are all UWB modules 3 arranged on the outer surface of the vehicle Hv.
- each UWB module 3 may be substantially the same regardless of the installation position. Note that the example of the arrangement of the plurality of UWB modules 3 shown in FIG. 4 is just one example, and the plurality of UWB modules 3 may be set in different positions.
- Each UWB module 3 operates according to instructions from the ECU 1. Each UWB module 3 starts up based on instructions from the ECU 1 and performs UWB ranging processing. After performing UWB ranging processing, the UWB module 3 stops operating either spontaneously or based on instructions from the ECU 1.
- the body ECU 4 is an ECU that detects user operations (actions) on the vehicle Hv based on an input signal from the action sensor 5, and operates the actuator 6 in response to the detected user operation.
- Actions on the vehicle Hv include locking and unlocking operations, sitting down, pressing a start switch, and depressing the brake pedal.
- the action sensor 5 includes, for example, a door sensor provided on an outer door handle, a start switch, a brake pedal sensor, and a seating sensor.
- the ECU 1 can detect a touch operation on the door sensor as an unlocking operation/locking operation.
- the door sensor is a sensor for detecting user operations for unlocking and locking the doors of the vehicle Hv.
- the door sensor may be a touch sensor or a push switch.
- the start switch is a push switch that the user uses to turn the driving power on and off.
- the actuator 6 is, for example, a lock motor or a mechanism for switching on and off the headlights and welcome lamps.
- the lock motor is a motor that switches between locking and unlocking the door.
- the welcome lamp is an in-vehicle lighting device that illuminates the road surface near the door. The welcome lamp is placed on the side mirror, side sill, the bottom end of the door panel, etc.
- the body ECU 4 When the body ECU 4 detects a specific event that requires detection of the location of the portable device 9, such as an unlocking operation, the body ECU 4 may transmit an event occurrence notification signal to the ECU 1.
- the ECU 1 may execute control and processing related to the detection of the device location based on the input of the event occurrence notification signal from the body ECU 4.
- the TCU7 is a communication unit that allows the vehicle Hv to communicate various information bidirectionally with an external network.
- the TCU7 may be provided within the housing of the ECU1, rather than being connected to the ECU1 via an in-vehicle network.
- the TCU7 has a wireless module for wireless communication with the external network.
- the TCU7 can report the vehicle's condition and location information to a management center when a vehicle accident occurs, by wirelessly communicating with the external network via the wireless module.
- the TCU7 can obtain data for updating software used in various ECUs installed in the vehicle Hv from a data center, etc.
- the TCU7 can acquire a mobile country code indicating the operating area and a mobile network code indicating the telecommunications carrier from the communication equipment with which it is communicating, through communication with an external network via a wireless module.
- the TCU7 repeatedly transmits the acquired mobile country code to the main controller 11 at a predetermined cycle.
- the TCU7 is also equipped with a GPS receiver for acquiring position information of the vehicle Hv.
- the TCU7 also repeatedly transmits vehicle position information measured by the GPS receiver to the main controller 11 at a predetermined cycle. This enables the main controller 11 to identify the country to which the location where the vehicle Hv is located belongs, based on the mobile country code and/or vehicle position information transmitted from the TCU7.
- the mobile country code and/or vehicle position information corresponds to country information.
- the BLE module 2 includes an RF core 21, an antenna 22, and a BLE controller 23, as shown in FIG.
- the antenna 22 is an antenna element for transmitting and receiving radio waves in the frequency band used for BLE communication, i.e., the 2.4 GHz band.
- the 2.4 GHz band can be understood as a frequency band that includes multiple channels (Ch 0 to 39) used for BLE communication.
- the antenna 22 is electrically connected to the RF core 21.
- the channel can also be referred to as the frequency.
- the channel used for actual communication in other words, the frequency/channel used) changes over time by frequency hopping or in response to instructions from the BLE controller.
- the RF core 21 is a circuit module that performs signal processing for transmitting and receiving radio signals.
- the RF core 21 may include a modulation circuit, a demodulation circuit, a frequency conversion circuit, an amplifier circuit, a local oscillator, etc.
- the RF core 21 also has input/output terminals for outputting signals to the antenna 22 and receiving signals from the antenna 22.
- the RF core 21 is connected to the BLE controller 23 so that they can communicate with each other.
- the RF core 21 demodulates the signal received by the antenna 22 and provides it to the BLE controller 23.
- the RF core 21 also modulates transmission data input from the BLE controller 23 and radiates it as radio waves from the antenna 22.
- the RF core 21 may be realized as an IC chip (i.e., a transmission/reception IC).
- the RF core 21 is configured to be able to transmit and receive modulated signals for data communication as well as CW signals for each channel as a function for CS ranging.
- the RF core 21 also includes a reception strength detection unit E1 and a reception phase detection unit E2.
- the reception strength detection unit E1 is a functional unit that measures the reception strength of a received signal.
- the reception strength detection unit E1 outputs data indicating the detected reception strength to the BLE controller 23.
- the reception phase detection unit E2 is a circuit that detects the reception phase, which is the phase angle of the reception signal relative to the output signal of the local oscillator, when a CW signal is received.
- the phase angle of the reception signal relative to the output signal of the local oscillator corresponds to the reception phase.
- the reception phase can be interpreted as the output value of the arctangent whose input value is, for example, the ratio of the Q (Quadrature-Phase) component to the I (In-Phase) component of the reception signal.
- the magnitude of the I component corresponds to the strength of the in-phase component of the reception signal.
- the magnitude of the Q component corresponds to the strength of the quadrature component of the reception signal.
- the I component is obtained by multiplying the reception signal by the carrier wave output by the local oscillator.
- the Q component is obtained by multiplying the reception signal by a phase-shifted signal that shifts the phase of the output signal of the local oscillator by 90°.
- the phase-shifted signal can be obtained by passing the output signal of the local oscillator through a phase shift circuit, which is a circuit that shifts the phase by 90°.
- the local oscillator is a circuit that generates a sine wave or cosine wave of the carrier frequency, and is realized, for example, by using a voltage-controlled oscillator (VCO).
- VCO voltage-controlled oscillator
- the reception phase may be determined based on an IQ signal whose frequency has been reduced to the baseband.
- the detected reception phase information is used to calculate the device distance.
- the RF core 21 provides the BLE controller 23 with the detection value of the reception phase of the CW signal in association with information indicating the frequency in use (e.g., channel number). Each time the frequency in use is switched, the RF core 21 detects the reception phase of the CW signal as part of the ranging process. In other words, the BLE controller 23 is provided with data indicating the reception phase for each frequency.
- the BLE controller 23 is a microcomputer that controls the RF core 21.
- the BLE controller 23 includes a processor 24, a memory 25, a storage 26, and an input/output circuit 27.
- the BLE controller 23 is responsible for controlling the exchange of data with the ECU 1. Specifically, the BLE controller 23 provides the ECU 1 with received data input from the RF core 21 either sequentially or based on a request from the ECU 1.
- the BLE controller 23 also outputs transmission data input from the ECU 1 to the RF core 21.
- the BLE controller 23 includes a CS ranging unit F1, a reception strength acquisition unit F2, and a report processing unit F3.
- the CS ranging unit F1, the reception strength acquisition unit F2, and the report processing unit F3 may each be a software module or a hardware module.
- the following descriptions of the CS ranging unit F1, the reception strength acquisition unit F2, and the report processing unit F3 can be replaced with the BLE module 2 or the BLE controller 23 as appropriate.
- the CS ranging unit F1 is a functional unit that executes CS ranging.
- CS ranging here refers to a process of generating distance data indicating the device distance based on a distance-related value (reception phase), which is a parameter indicating the length of the propagation path of the wireless signal from the BLE module 2 to the mobile device 9.
- CS ranging includes a process of performing bidirectional or unidirectional communication with the mobile device 9 to obtain the reception phase, which is a distance-related value.
- CS ranging can also be called High Accuracy Distance Measurement (HADM) or phase difference ranging.
- HADM High Accuracy Distance Measurement
- a series of processes including communication for CS ranging may also be referred to as CS ranging processing.
- the CS ranging unit F1 of this embodiment acquires the reception phase for each frequency as a CS ranging process, and calculates the device distance based on the reception phase.
- the reception phase is the phase difference between the CW signal transmitted by the portable device 9 and the CW signal received by the BLE module 2.
- the reception phase can be called the transmission/reception phase difference, the single frequency phase difference, or the first-order phase difference.
- the CS ranging unit F1 can obtain the reception phase for each frequency, for example, by a one-way method.
- the one-way method is a method in which the reception phase of the CW signal transmitted from the portable device 9 is used as the basis for calculating the phase difference between frequencies, assuming that the initial phase of the CW signal for each frequency transmitted from the portable device 9 is constant.
- the reception phase (in other words, the single frequency phase difference) used as the basis for calculating the phase difference between frequencies can also be obtained by other methods, such as a passive two-way method or an active two-way method.
- the passive two-way method and the active two-way method will be described later as a supplementary explanation.
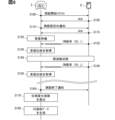
- FIG. 6 is a flowchart showing an example of CS ranging processing.
- the CS ranging processing includes a preparation phase for adjusting the conditions for implementing ranging, a collection phase for collecting reception phases by actually transmitting and receiving CW signals, and a calculation phase for calculating distance based on the collected reception phases for each frequency.
- wireless communication for acquiring distance-related values (reception phases), such as transmitting and receiving CW signals is also referred to as CW ranging communication.
- Step S100 is a step in which the BLE module 2 transmits a CS ranging start request to the mobile device 9.
- the CS ranging start request is a BLE signal that requests the mobile device 9 to start CS ranging.
- the CS ranging start request can be transmitted using a data channel.
- the mobile device 9 returns a positive response signal (so-called Ack) to the BLE module 2 based on receiving the CS ranging start request.
- the BLE module 2 transmits a ranging setting notification signal based on receiving an Ack in response to a CS ranging start request from the mobile device 9.
- the ranging setting notification signal is a signal indicating the parameters for carrying out communication for CS ranging.
- the parameters for carrying out ranging communication may include an initial phase setting value, a hopping interval, a frequency transition amount, an initial frequency, and the like.
- the initial phase setting value is basically set to 0.
- the hopping interval indicates the time for switching frequencies, in other words, the time for maintaining one frequency.
- the hopping interval may be the same as the connection interval used in data communication, or it may be different.
- the frequency transition amount is a parameter indicating the amount of change in frequency when switching frequencies.
- the frequency transition amount may be the same value as the hop increment during data communication, or it may be different. If it is the same value as the hop increment during data communication, the frequency transition amount in CS ranging may be determined by the hop increment.
- the initial frequency is the frequency of the CW signal transmitted first in a series of ranging communications.
- the frequency information may be expressed, for example, by a channel number, or may be expressed separately from the channel number.
- step S115 the portable device 9, upon receiving the ranging setting notification signal, returns an Ack to the BLE module 2.
- step S120 the BLE module 2, upon receiving the Ack from the portable device 9, transitions to a state in which it can receive a signal of the initial frequency, i.e., a reception standby state.
- step S125 the portable device 9 starts transmitting a CW signal at the initial frequency when a predetermined time has elapsed since returning the Ack.
- the transmission of the CW signal can be stopped, for example, when a certain time has elapsed since the start.
- the CW transmission time which is the time for which the CW signal is continuously transmitted, may be set to be shorter than the hopping interval. Note that the portable device 9 may start transmitting the CW signal based on receiving a CW transmission request from the BLE module 2 after receiving the ranging setting notification signal.
- the BLE module 2 When the BLE module 2 receives a CW signal from the portable device 9, in step S130, it detects the reception phase and stores the reception phase data together with frequency information (e.g., channel number) in the memory 25. In step S140, the BLE module 2 and the portable device 9 automatically switch the frequency in use at the hopping interval previously agreed upon in step S110.
- the frequency after the change can be uniquely determined from the frequency before the change and the previously agreed upon frequency transition amount.
- step S145 When the portable device 9 switches the operating frequency, in step S145 it transmits a CW signal of the new operating frequency. By switching the operating frequency, the BLE module 2 also transitions to a state in which it can receive a signal of the new operating frequency. Then, in step S150, the BLE module 2 observes and acquires the reception phase at the frequency after the switch.
- the BLE module 2 and the portable device 9 repeat the frequency switching process and the reception phase acquisition process described above until they have collected the reception phases for all frequencies for which they are to acquire the reception phases (for example, all channels (Ch 0 to 36) that can be used for data communication).
- the BLE module 2 and the portable device 9 may end the repetitive process when they have collected the reception phases for all the predetermined necessary frequencies.
- the required number here may be the same as the number of data channels, or it may be more or less than that. The greater the number of frequencies for which they collect the reception phases, the higher the ranging accuracy, which will be described later.
- the time and power consumption required for ranging communication may increase.
- the required number may be 3, 4, 5, 8, 10, 16, 37, 81, etc.
- the BLE module 2 transmits a ranging end notification signal to the portable device 9 at the timing when the required number of reception phases for each frequency have been collected.
- the ranging end notification signal is a data signal for notifying the end of ranging communication.
- the portable device 9 transitions to a normal data communication mode.
- the normal data communication mode corresponds to a state in which specified data such as voice data can be transmitted and received.
- the transmission and reception of the ranging end notification signal is an optional element and may be omitted.
- the portable device 9 may return an Ack to the BLE module 2.
- the phase change coefficient is a parameter that indicates the degree to which the reception phase changes in response to a change in frequency.
- the phase change coefficient can also be called the degree of phase change, the amount of phase shift, or the correlation coefficient between phase and frequency.
- the inter-frequency phase difference can be called the two-frequency phase difference or the quadratic phase difference.
- the inter-frequency phase difference corresponds to the amount of phase angle displacement due to a change in the frequency used.
- the CS ranging unit F1 of this embodiment calculates a regression line showing the relationship between frequency and reception phase based on the reception phase for each frequency, and uses the slope of the regression line as the phase change coefficient. This is because the slope of the regression line indicates the amount of change in reception phase relative to the amount of change in frequency.
- the regression line can also be referred to as an approximation line.
- the CS ranging unit F1 may provisionally calculate a first regression line based on all observed received phase data, and may recalculate a second regression line after excluding values (so-called outliers) whose distance from the provisionally calculated first regression line is equal to or greater than a predetermined value.
- the CS ranging unit F1 may use the slope of the second regression line as the phase change coefficient. In this way, the phase change coefficient used in distance calculation may be determined based on a regression line whose population is data excluding outliers. With this configuration, the accuracy of the inter-frequency phase difference, and therefore the ranging accuracy, may be improved.
- the CS ranging unit F1 may calculate the inter-frequency phase difference ( ⁇ ), the differential frequency ( ⁇ f), and the phase change coefficient for each combination of frequencies for which the reception phase can be observed.
- the CS ranging unit F1 may use the average or median of the phase change coefficients for each combination of frequencies as the phase change coefficient to be used for distance calculation.
- the parameter "C" in the above formula indicates the propagation speed of radio waves (3 ⁇ 10 ⁇ 8 m/sec).
- the parameter k constituting formula 1 is a design value and is set to 1.0 or 0.5. The value of k can be determined depending on whether the transmission and reception phase difference is calculated as a phase change coefficient for one way or a round trip.
- the CS ranging unit F1 stores the calculated device distance data in memory 25.
- the steps executed by the BLE module 2 are executed in cooperation with the CS ranging unit F1 and the RF core 21.
- the BLE module 2 determines and notifies the implementation conditions for CS ranging, but this is not limited to this.
- the portable device 9, instead of the BLE module 2, may determine the specifications for implementing ranging communication and transmit a ranging setting notification signal.
- the entity that executes each step may be interchangeable. The above sequence may be executed by the portable device 9 acting as the entity (in other words, the master).
- the reception strength acquisition unit F2 is configured to acquire data indicating the reception strength of the signal from the portable device 9 for each frequency from the RF core 21. While the BLE module 2 is connected to and communicating with the portable device 9, it periodically transmits and receives a data signal for communication check with the portable device 9. The reception strength acquisition unit F2 acquires reception strength data when the data signal for communication check is received. Note that communication for communication check can be performed at connection intervals. Communication for communication check may also be performed each time channel hopping is performed.
- the signal used to detect the reception strength is not limited to a data signal for confirming communication. It may be a normal data signal or an advertising signal. Furthermore, the signal used to detect the reception strength may be a signal for CS ranging communication. In the following, reception strength refers to the reception strength of the signal transmitted from the mobile device 9, unless otherwise noted.
- the report processing unit F3 transmits to the main controller 11 the device distance calculated by the CS distance measuring unit F1 and reception strength data indicating the reception strength acquired by the reception strength acquisition unit F2. The transmission of various data may be performed periodically. The report processing unit F3 may transmit various data based on a request from the main controller 11.
- the portable device 9 is a communication terminal such as a smartphone, the user performs biometric authentication or inputs a passcode on the portable device 9. This makes it possible to confirm that the portable device 9 is being operated by the user himself/herself in the owner device registration process.
- the user uses the portable device 9 to request the start of the owner device registration process from a management server (not shown).
- the management server creates a password.
- the created password is distributed to the portable device 9 and the in-vehicle system VS via wireless communication.
- the in-vehicle system VS displays, for example, a button to start pairing between the owner device and the in-vehicle system VS on a multimedia screen installed in the vehicle cabin.
- the pairing start button When the user operates the pairing start button, the pairing process is started.
- the in-vehicle system VS it is preferable for the in-vehicle system VS to authenticate the user by, for example, holding a smart key having a short-range wireless communication function such as NFC near the main switch.
- the user may be authenticated by inputting a passcode indicating that the user is the user on the multimedia screen.
- the pairing start button may also be displayed on the display 95 of the portable device 9, rather than on the multimedia screen installed in the vehicle cabin.
- an advertisement signal is sent from the slave (ECU 1 or mobile device 9) in the BLE communication to the central (mobile device 9 or ECU 1).
- the central in the BLE communication receives the advertisement signal from the slave.
- the central confirms that the communication partner is a legitimate one based on the password distributed by the management server, it responds to the advertisement signal and returns a connection request.
- a BLE communication connection between the central and the slave is established based on the slave's receipt of the connection request from the central.
- the central and the slave When a BLE communication connection between the central and the slave is established, the central and the slave generate encryption keys for each other and exchange them via BLE communication.
- the exchanged encryption key is stored in a storage medium such as each storage after the correctness of the exchanged encryption key is authenticated.
- the data signal of the BLE communication after pairing is encrypted with the exchanged encryption key. This ensures the security of the BLE communication between the ECU 1 and the portable device 9.
- the ECU 1 or the portable device 9 generates a URSK (UWB Ranging Secret Key), which is a key used in UWB ranging communication, and shares it via BLE communication.
- the URSK can be used to create information that proves that the communication partner in the UWB ranging communication is the correct communication partner.
- the ECU 1 and the portable device 9 share the generated URSK, the ECU 1 becomes able to perform UWB ranging communication with the portable device 9 as the communication partner.
- the ECU 1 registers and stores the generated URSK by linking it to the ID (portable device ID) of the portable device 9. It is preferable that the ECU 1 confirms that UWB ranging communication with the portable device 9 is possible by performing UWB ranging using the generated URSK.
- the management server is notified that the portable device 9 has been registered as an owner device with the in-vehicle system VS of the vehicle Hv, and the owner device registration process is completed.
- the slave in the BLE communication (ECU 1 or portable device 9) starts transmitting an advertising signal.
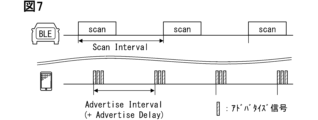
- the central in the BLE communication (portable device 9 or ECU 1) starts scanning for the corresponding advertising signal. Note that, in the following, an example in which the portable device 9 is a slave in the BLE communication will be described.
- the portable device 9 transmits an advertising signal at an interval that is a predetermined advertising interval plus a random time (so-called advertising delay).
- the BLE module 2 of the in-vehicle system VS goes into a reception standby state at a predetermined scan interval and scans for advertising signals from the portable device 9.
- the size of the scan window which corresponds to the length of time for which the reception standby state is maintained, may be designed as appropriate.
- the lengths of the scan interval and advertising interval can also be set to various values.
- the various interval values are preferably set to values that allow for a quick connection when the user approaches the vehicle Hv.
- the advertising interval can be set to a value between 20 milliseconds and 400 milliseconds, for example, 37.5 milliseconds, 50 milliseconds, 80 milliseconds, 100 milliseconds, etc.
- the advertising interval may be set to a value greater than 400 milliseconds as long as it complies with the BLE standard.
- the advertising interval may also be set to a value shorter than the scan interval.
- the in-vehicle communication system VS In response to the advertisement signal from the portable device 9, the in-vehicle communication system VS returns a connection request, thereby establishing a communication connection between the portable device 9 and the in-vehicle system VS.
- the portable device 9 and the BLE module 2 After the communication connection between the portable device 9 and the in-vehicle system VS is established, the portable device 9 and the BLE module 2 periodically perform data communication at a specified connection interval via BLE communication, as shown in FIG. 8.
- the content of the communication may be various, such as a communication confirmation.
- the connection interval may be set to a value between 7.5 milliseconds and 200 milliseconds, such as 30 milliseconds or 40 milliseconds.
- the connection interval may also be set to a value exceeding 200 milliseconds as long as it complies with the BLE standard.
- the ECU 1 determines whether to use a UWB signal or a BLE signal to locate the portable device 9. In this case, the ECU 1 determines to use a UWB signal to locate the portable device 9 in principle. However, if the vehicle Hv equipped with the vehicle electronic key system according to this embodiment is used in a country where the use of UWB communication outdoors is restricted, or if country information cannot be obtained from the TCU 7, the ECU 1 determines to use a BLE signal to locate the portable device 9. In this embodiment, UWB communication corresponds to the first communication method, and BLE communication corresponds to the second communication method.
- the ECU 1 determines whether a BLE signal is to be used for positioning the portable device 9, the ECU 1 first determines whether the portable device 9 supports CS ranging communication. For example, the ECU 1 can obtain information regarding whether the portable device 9 supports CS ranging communication via BLE communication. The ECU 1 can determine whether the portable device 9 supports CS ranging communication based on the obtained information. Confirmation of whether the portable device 9 supports CS ranging communication may be performed in advance as part of the registration process when the portable device 9 is registered as an owner device. When it is determined that the portable device 9 supports CS ranging communication, the ECU 1 measures the position of the portable device 9 based on the CS ranging result using the BLE signal and the ranging result using the received signal strength of the BLE signal.
- the CS ranging communication is preferably started when the received signal strength of the BLE signal becomes equal to or greater than a predetermined strength threshold or when the distance between the positions measured by the respective GPS receivers becomes equal to or less than a distance threshold.
- the ECU 1 can send a request to start CS ranging to the BLE module 2.
- FIG. 9 is a diagram showing the interaction between the portable device 9 and the in-vehicle system VS when performing CS ranging communication.
- the CS ranging interval which is the interval at which the BLE module 2 performs CS ranging communication, can be set to, for example, twice or three times the connection interval. In this way, by making the CS ranging interval longer than the interval at which periodic data communication is performed, it is expected that power consumption can be reduced. However, the CS ranging interval may be the same as the connection interval. Note that "CS-Ranging Interval" in FIG. 9 indicates the CS ranging interval.
- CW signals can be transmitted and received at multiple frequencies.
- one CS ranging communication may be the transmission and reception of a CW signal at one frequency. The duration of one CS ranging communication can be adjusted depending on the length of the CW signal, etc.
- the ECU 1 When the portable device 9 and the in-vehicle system VS perform data communication and CS ranging communication as shown in FIG. 9 via their respective BLE modules 2, 97, the ECU 1 performs received signal strength ranging from the received signal strength of the signal for data communication, and performs CS ranging through CS ranging communication. On the other hand, if the portable device 9 does not support CS ranging communication, normal data communication is performed between the BLE module 2 and the portable device 9, as shown in FIG. 8, for example, and received signal strength ranging is performed using the received signal strength for that data communication.
- CS ranging communication may be terminated, for example, when the portable device 9 is powered off and the BLE communication connection is disconnected, or when the received signal strength of the BLE signal falls below a predetermined strength threshold.
- the strength threshold for terminating CS ranging communication may be the same as or different from the strength threshold for starting CS ranging communication.
- CS ranging communication may be terminated if no action is taken on the vehicle for a predetermined time after CS ranging communication is started.
- CS ranging communication may also be terminated when the user gets into the vehicle Hv and turns on the start switch. When any of the above-mentioned conditions for terminating CS ranging communication are met, the ECU 1 can send a request to stop CS ranging to the BLE module 2.
- CS ranging communication may be started in response to the opening and closing of the door of the vehicle Hv. This makes it possible to detect the position of the portable device 9 through CS ranging communication when the portable device 9 is taken out of the vehicle while the vehicle is temporarily stopped with the start switch not turned off.
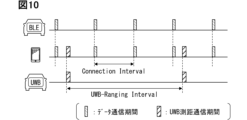
- the UWB ranging interval which is the interval at which the ECU 1 causes the UWB module 3 to perform UWB ranging communication, can be set to, for example, three or four times the connection interval. By lengthening the UWB ranging interval in this way, it is expected that power consumption can be reduced. However, the UWB ranging interval may be the same as the connection interval. Note that "UWB-Ranging Interval" in FIG. 10 indicates the UWB ranging interval.
- One UWB ranging communication may include UWB ranging communication with multiple UWB modules 3.
- the UWB ranging interval can be set to a value between 150 milliseconds and 400 milliseconds, such as 180 milliseconds or 280 milliseconds.
- the UWB ranging interval may be longer than the CS ranging interval.
- the UWB ranging interval may be the same as or shorter than the CS ranging interval.
- the detection of the position of the mobile device using the UWB signal described above is started, for example, when the received signal strength of the BLE signal exceeds a predetermined strength threshold, or when the distance between the positions measured by each GPS receiver falls below a distance threshold. This is because it is expected to have the effect of reducing power consumption.
- the ECU 1 can transmit a request to start UWB ranging to the multiple UWB modules 3.
- the multiple UWB modules 3 transition from a sleep state to an active state. This enables the multiple UWB modules 3 to transmit UWB ranging signals. In other words, the multiple UWB modules 3 are in a sleep state while not performing UWB ranging.
- UWB ranging communication may be terminated when the power of the portable device 9 is turned off and the BLE communication connection is disconnected, or when the received signal strength of the BLE signal falls below a predetermined strength threshold.
- the strength threshold for terminating UWB ranging communication may be the same as or different from the strength threshold for starting UWB ranging communication.
- UWB ranging communication may be terminated if no action is taken on the vehicle for a predetermined time after UWB ranging communication is started.
- UWB ranging communication may also be terminated when the user gets into the vehicle Hv and turns on the start switch.
- the ECU 1 can transmit a request to stop UWB ranging to the multiple UWB modules 3.
- the multiple UWB modules 3 terminate UWB ranging communication. Then, for example, if the multiple UWB modules 3 do not receive a new request to start UWB ranging within a predetermined time after terminating UWB ranging communication, they can transition to a sleep state.
- UWB ranging communication may be started in response to the opening and closing of the door of the vehicle Hv. This makes it possible to detect through UWB ranging communication that the portable device 9 has been taken out of the vehicle when the vehicle is temporarily stopped with the start switch not turned off.
- the main controller 11 includes, as functional blocks, a communication control unit G1 and a position determination unit G2.
- the communication control unit G1 is a software/hardware module that controls the operations of the BLE module 2 and the UWB module 3.
- the communication control unit G1 causes the BLE module 2 to perform CS ranging processing when it is unable to acquire country information (described later) or when it is determined that the UWB module 3 cannot be used based on the acquired country information.
- the communication system control unit G1 also performs a circular measurement process, which is a process of having each of the multiple UWB modules 3 perform UWB ranging in turn. After a BLE communication connection is established between the vehicle Hv and the portable device 9, the communication system control unit G1 periodically performs the circular measurement process when UWB ranging can be performed.
- the communication system control unit G1 may determine the start timing of the circular measurement process or dynamically change the circular measurement interval according to the value of the received signal strength observed within a fixed period of time. Alternatively, the communication system control unit G1 may perform the circular measurement process based on the detection of the occurrence of a specified event that requires the position of the portable device 9 to be detected.
- the position determination unit G2 detects the position of the portable device 9 by determining the device position relative to the vehicle Hv based on the device distance for each UWB module 3 obtained as a result of the patrol measurement process, or based on the received signal strength ranging results and/or the CS ranging results.
- the device position can be expressed in multiple areas/zones that are pre-set in the vehicle Hv, such as an engine start area ESA inside the vehicle, an entry area EA outside the vehicle, and an intermediate area and a distant area outside the vehicle.
- the entry area EA outside the vehicle may include, for example, a first entry area EA1 near the driver's seat, a second entry area EA2 near the passenger seat, and a third entry area EA3 near the trunk, as shown in FIG. 12.
- the entry area EA refers to, for example, an area outside the vehicle where the distance from the driver's seat, passenger seat, and trunk of the vehicle Hv is less than a predetermined proximity determination value.
- the proximity determination value may be set to, for example, 1.0 m, 1.5 m, 2 m, etc.
- the entry area EA is an area where the doors and trunk of the vehicle Hv can be unlocked/locked.
- the unlocking of the vehicle Hv only the doors and trunks corresponding to each entry area may be unlocked, or all the doors and trunks may be unlocked in response to the detection of the presence of a portable device 9 in one entry area.
- the locking of the vehicle Hv when a portable device 9 is present in one entry area and a locking operation is performed by a user holding the portable device 9, all the doors and trunks may be locked.
- the far area refers to an area where the distance from the vehicle Hv is equal to or greater than a predetermined far judgment value.
- the far judgment value is a parameter for judging that the mobile device 9 is not present around the vehicle Hv.
- the far judgment value is set to, for example, 5.0 m, 6.0 m, 10 m, or 12 m.
- the intermediate area refers to an area intermediate between the far area and the entry area EA.
- the intermediate area may be a so-called welcome area in which a predetermined welcome control, such as turning on the exterior lights, is executed upon entry of the mobile device 9 into the area.
- the intermediate area may be an area in which a predetermined control that is not executed when the mobile device 9 is present far outside the vehicle is executed/started, such as authentication by wireless communication with the mobile device 9, tracking of the device position, and shortening of the position judgment period.
- the intermediate area may also be called a standby area, a surrounding area, or the like.
- the intermediate area may be an area in which a user can use a function to remotely park/exit the vehicle Hv.
- the above-mentioned entry area EA, intermediate area, and distant area are subdivisions of the outside-vehicle area. Furthermore, the position determination unit G2 may determine whether or not the portable device 9 is present inside the vehicle as an engine start area ESA inside the vehicle, as shown in FIG. 12.
- the position determination unit G2 of this embodiment determines the stay area, which is the area where the portable device 9 is located, as described above.
- the position determination unit G2 may calculate device position coordinates instead of/in addition to determining the stay area.
- the device position coordinates refer to the position coordinates where the portable device 9 is located in a two-dimensional/three-dimensional coordinate system based on a predetermined position of the vehicle Hv.
- the calculation of the device position coordinates can be performed using a method similar to three-point positioning or multi-point positioning in the technical fields of GPS and position estimation.
- the main controller 11 transmits device position data, which is data indicating the determined device position, to a specified ECU, such as the body ECU 4.
- the main controller 11 may periodically update the device position data.
- the main controller 11 may also perform a patrol measurement process in response to the occurrence of a specified event, and generate and update the device position data.
- step S200 the BLE controller 23 or the ECU 1 determines whether or not it has established a communication connection with the portable device 9. If it has established a communication connection with the portable device 9, the ECU 1 proceeds to step S205 and determines whether or not it is possible to obtain country information from the TCU 7.
- UWB communication outdoor use may be restricted depending on the country. Even if it is possible to use UWB communication, the frequency band that can be used for outdoor UWB communication may be restricted depending on the country. As a result, the frequency band that can be used for outdoor UWB communication differs depending on the country.
- the country information cannot be obtained from the TCU 7, it is not possible to confirm whether outdoor use of UWB communication is possible or the permitted frequency band of UWB communication. Therefore, if the country information cannot be obtained, it is preferable to avoid using UWB communication. For example, if the vehicle Hv is parked in a parking lot in a building, the TCU 7 may not be able to communicate with an external network via the wireless module, and the GPS receiver may not be able to receive GPS signals from a satellite.
- the ECU 1 determines through communication with the TCU 7 that the TCU 7 is in the above-mentioned situation, it determines that it is not possible to obtain country information from the TCU 7, and proceeds to the process of step S240.
- the ECU 1 may also determine that it is not possible to obtain country information if it is unable to communicate with the TCU 7 for some reason. On the other hand, when the ECU 1 determines through communication with the TCU 7 that it is possible to obtain country information, it proceeds to the process of step S210.
- step S210 the ECU 1 acquires country information from the TCU 7. Then, in step S215, the ECU 1 determines whether or not UWB ranging communication is available based on the acquired country information. Restriction information on UWB communication for each country is stored in advance in the memory 13 of the main controller 11 of the ECU 1.
- the restriction information on UWB communication includes not only whether UWB communication can be used outdoors, but also channel (frequency) information available for UWB communication. If it is determined in step S215 that UWB cannot be used, the ECU 1 proceeds to processing of step S240. On the other hand, if it is determined that UWB can be used, the ECU 1 proceeds to processing of step S220.
- step S220 the ECU 1 refers to the UWB communication regulation information stored in the memory 13 and selects a channel (frequency) available for UWB communication based on the acquired country information. Then, in step S225, the ECU 1 shares the UWB communication specification information including the selected channel with the portable device 9, and then instructs each UWB module 3 to periodically execute a UWB ranging process, that is, a patrol measurement process. Then, the ECU 1 acquires the device distance for each UWB module 3 obtained as a result of the patrol measurement process. In step S230, the ECU 1 determines (detects) the position of the portable device 9 relative to the vehicle Hv based on the acquired device distance for each UWB module 3.
- the ECU 1 determines the position of the portable device 9, it transmits the determined position data of the portable device 9 to the body ECU 4.
- the body ECU 4 can execute predetermined controls, such as unlocking/locking the vehicle Hv and turning on the power, based on the position data of the portable device 9 provided by the ECU 1.
- step S240 when the ECU 1 determines the location of the portable device 9 using the BLE signal as one of the predetermined areas, if there are limitations to the determinable areas, the ECU 1 notifies the user of this as area restriction information, for example, via BLE communication. This allows the user to recognize in advance which areas the location of the portable device 9 cannot be determined, in other words, which areas the approach of the portable device 9 cannot be detected.
- one BLE module 2 is mounted on the vehicle Hv. Therefore, whether CS ranging is performed or ranging based on the received signal strength is performed, the determined area is an area approximately centered on the BLE module 2, as shown in FIG. 14.
- a fourth entry area EA4 and an engine start area ESA are determined approximately centered on the BLE module 2.
- the fourth entry area EA4 is expanded to a size including an entry area where the trunk can be opened and closed, a problem occurs that the entry area for the driver's seat and the passenger seat becomes too large. Therefore, as in the example shown in FIG.
- the determinable area may be limited compared to when the position of the portable device 9 is determined as any area using a UWB signal.
- the third entry area EA3 is limited among the areas shown in FIG. 12, but the entry area that is limited may differ depending on the installation position of the BLE module 2 in the vehicle Hv.
- step S245 the ECU 1 periodically executes a process for measuring the device distance from the BLE module 2 to the portable device 9 using the BLE signal. At this time, before executing the process for measuring the device distance, the ECU 1 executes a process for determining a method for measuring the distance to the portable device 9 using the BLE signal.
- the flowchart in FIG. 15 shows an example of a process for determining a method for measuring the distance to the portable device 9.
- step S300 the ECU 1 determines whether the portable device 9 supports CS ranging communication and is capable of CS ranging based on a signal received from the portable device 9 indicating whether CS ranging communication is supported or not, or a response from the portable device 9 to an inquiry as to whether the portable device 9 supports CS ranging communication. If the ECU 1 determines that CS ranging is supported, the ECU 1 proceeds to processing in step S305. On the other hand, if the ECU 1 determines that CS ranging is not supported, the ECU 1 proceeds to processing in step S310. Note that when the portable device 9 is the master, the portable device 9 may determine whether the BLE module 2 of the in-vehicle system VS supports CS ranging communication.
- step S305 the ECU 1 determines to perform both CS ranging using a BLE signal and ranging using the received signal strength of the BLE signal as a method for measuring the distance to the portable device 9, and periodically performs CS ranging and received signal strength ranging.
- the accuracy of detecting the position of the portable device 9 can be improved. For example, by periodically performing CS ranging and received signal strength ranging, it is possible to determine that the portable device 9 is inside the vehicle when the received signal strength is equal to or greater than the strength threshold indicating that the portable device 9 is inside the vehicle, and the result of CS ranging indicates that the portable device 9 is inside the vehicle (for example, within 1 m from the BLE module 2).
- the ECU 1 may perform only CS ranging without performing received signal strength ranging.
- the ECU 1 determines to perform ranging using the received signal strength of the BLE signal as a method for measuring the distance to the portable device 9, and periodically performs received signal strength ranging.
- step S250 of the flowchart in FIG. 13 the ECU 1 determines (detects) the position of the portable device 9 relative to the vehicle Hv based on the results of the CS ranging and the received signal strength ranging, or the received signal strength ranging.
- the position of the portable device 9 is detected as whether it belongs to each area, such as whether it belongs to the fourth entry area EA4 or the engine start area ESA, which are approximately centered on the BLE module 2, as shown in FIG. 14.
- the ECU 1 determines the position of the portable device 9
- the body ECU 4 can execute predetermined control, such as unlocking/locking the vehicle Hv and turning on the power.
- the ECU 1 determines whether or not positioning of the portable device 9 has been completed. For example, the ECU 1 may determine that positioning of the portable device 9 has been completed when the vehicle Hv stops, the occupants get off, the vehicle Hv is locked, and the portable device 9 is separated from the vehicle, making it impossible to measure the position of the portable device 9. If positioning of the portable device 9 has not been completed, the ECU 1 returns to step S205 and repeatedly executes the above-described process. This allows country information to be acquired repeatedly (periodically), and a communication method corresponding to the acquired country information can be selected.
- a vehicle electronic key system to which a position detection system, a position detection method, and a computer according to a second embodiment of the present disclosure are applied will be described.
- the vehicle electronic key system according to this embodiment is configured similarly to the vehicle electronic key system according to the first embodiment described above. Therefore, a description of the configuration of the vehicle electronic key system according to this embodiment will be omitted.
- the electronic key system for vehicles according to the first embodiment described above determines whether to use the distance measurement results based on BLE signals or UWB signals to detect the position of the portable device 9 based on the country information obtained from the TCU 7.
- the electronic key system for vehicles according to this embodiment switches between using the distance measurement results based on BLE signals or UWB signals to detect the position of the portable device 9 when at least one of the multiple UWB modules 3 (anchors 3A to 3F) fails, depending on whether the failed UWB module is involved in determining whether it belongs to the required area near the driver's door.
- step S400 the BLE controller 23 or the ECU 1 determines whether or not it has established a communication connection with the portable device 9. If it has established a communication connection with the portable device 9, the ECU 1 proceeds to the process of step S405, where it determines whether or not all anchors of the UWB module 3 (e.g., UWB modules 3A to 3F in FIG. 4) are operating normally.
- the ECU 1 determines that, for example, a response signal received in response to a request to transmit a UWB ranging result corresponds to an unauthorized data frame with respect to the UWB module 3, it can determine that some kind of malfunction has occurred in the UWB module 3 that transmitted the request signal.
- each UWB module 3 may be provided with an abnormality diagnosis circuit that detects abnormalities such as disconnections and short circuits, and when the ECU 1 is notified of the occurrence of an abnormality from the UWB module 3, it may determine that the corresponding UWB module 3 is malfunctioning.
- step S410 determines that all anchors 3A-3F of the UWB module 3 are operating normally.
- step S425. determines that at least one of the anchors 3A-3F is faulty.
- steps S410, S415, and S420 are similar to steps S225, S230, and S235 in the flowchart of FIG. 13, and therefore will not be described here.
- step S425 the ECU 1 identifies the installation location of the faulty anchor.
- the ECU 1 stores a table showing the installation locations of the anchors 3A to 3F.
- the ECU 1 can identify the installation location of the faulty anchor by referring to this table.
- step S430 the ECU 1 determines whether the faulty anchor is involved in the determination of whether or not the mobile device 9 belongs to the required area near the driver's door.
- the ECU 1 cannot obtain the correct distance measurement result from the anchor 3C to the portable device 9. Therefore, as shown in FIG. 17, when the portable device 9 approaches the vehicle Hv from the side of the failed anchor 3C, the ECU 1 may obtain only the distance measurement results from the two anchors 3A and 3D. As a result, the ECU 1 may not be able to identify the position of the portable device 9, and may not be able to correctly detect the position of the portable device 9.
- the failed anchor 3C when the failed anchor 3C is involved in the determination of whether or not the entry area near the driver's seat belongs to the area, it may not be possible to detect that the user holding the portable device 9 has approached the driver's seat of the vehicle Hv. In this case, even if the user is located near the driver's door or performs an operation to unlock the door, the driver's door may not be unlocked, which may significantly impair the convenience of the user.
- the area near the driver's door is considered to be a required area, and it is determined whether the failed anchor is a required anchor involved in the belonging/not belonging judgment of the area near the driver's seat. If the failed anchor is a required anchor involved in the belonging/not belonging judgment of the area near the change of seat, the ECU 1 assumes that wireless communication with the portable device 9 cannot be performed using UWB communication, and proceeds to step S435. On the other hand, if the failed anchor is a non-required anchor that is not involved in the belonging/not belonging judgment of the area near the change of seat, the ECU 1 assumes that wireless communication with the portable device 9 can be performed using UWB communication, and proceeds to step S455.
- the processing of steps S435, S440, S445, and S450 is similar to steps S240, S245, S250, and S255 in the flowchart of FIG. 13, and therefore description thereof will be omitted.
- step S455 the ECU 1 notifies the user of the area in which the location of the portable device 9 cannot be identified by UWB ranging due to the faulty anchor and access to the vehicle Hv is restricted, as area restriction information, for example, via BLE data communication. This allows the user to know in advance that there are areas in which the approach to the vehicle Hv is not recognized, and allows the user to take measures such as, for example, avoiding the unrecognized areas when accessing the vehicle.
- the ECU 1 instructs each UWB module 3 to periodically execute UWB ranging processing, since the faulty anchor is not involved in the determination of whether the essential area near the driver's seat belongs to the vehicle. Note that the processing in steps S460, S465, and S470 is similar to steps S225, S230, and S235 in the flowchart of FIG. 13, and therefore further explanation is omitted.
- the system switches between using the distance measurement results based on the BLE signal or the distance measurement results based on the UWB signal to detect the position of the portable device 9, depending on whether the failed anchor is involved in determining whether the portable device 9 belongs to the required area near the driver's door.
- the system changes the method for detecting the position of the portable device 9.
- steps S500, S505, S510, S515, S520, and S525 is similar to steps S400, S405, S410, S415, S420, and S425 in the flowchart of FIG. 16, and therefore will not be described.
- step S530 the ECU 1 determines whether the portable device 9 is located near or within the area in which the faulty anchor is involved in the determination of whether it belongs to the vehicle.
- the ECU 1 can obtain GPS location information from the portable device 9 and compare it with the GPS location information of the vehicle Hv to determine the approximate location of the portable device 9 relative to the vehicle Hv.
- the approximate location of the portable device 9 relative to the vehicle Hv can be determined by UWB distance measurement communication with the two anchors.
- the ECU 1 determines that the location of the portable device 9 determined is not near or within the area in which the faulty anchor is involved in the determination of whether it belongs to the vehicle. the ECU 1 proceeds to the process of step S550.
- step S535 the ECU 1 instructs the BLE module 2 and the UWB module 3 to periodically perform both CS ranging and UWB ranging.
- the ECU 1 instructs the multiple UWB modules 3 to periodically perform UWB ranging, i.e., to start periodically performing the patrol measurement process.
- the ECU 1 instructs the BLE module 2 to start periodically performing CS ranging at a timing when UWB ranging is not being performed by the UWB module 3.
- the BLE module 2 can obtain from the ECU 1 the timing when UWB ranging is not being performed by the UWB module 3. Note that if the mobile device 9 does not support CS ranging communication, the ECU 1 instructs the BLE module 2 to periodically perform received signal strength ranging.
- step S610 the ECU 1 obtains UWB ranging results from multiple UWB modules 3, and obtains CS ranging results or received signal strength ranging results from the BLE module 2. In this way, the ECU 1 obtains CS ranging results or received signal strength ranging results in addition to UWB ranging results. For example, if one UWB module 3 fails and UWB ranging cannot be obtained, the amount can be compensated for by CS ranging or received signal strength ranging. Therefore, even if a UWB module 3 fails, the ECU 1 can detect the position of the mobile device 9 with high accuracy in step S540 of the flowchart in FIG. 18. Note that the processing of steps S545, S550, S555, and S560 of the flowchart in FIG. 18 is similar to steps S450, S460, S465, and S470 of the flowchart in FIG. 16, and therefore will not be described.
- the BLE module 2 is disposed outside the housing of the ECU 1.
- the present invention is not limited to this.
- the BLE module 2 may be disposed inside the housing of the ECU 1.
- the in-vehicle system VS may have, for example, a plurality of BLE modules 2A to 2F as the BLE module, as shown in FIG. 20.
- the plurality of BLE modules 2A to 2F are arranged in close proximity to a plurality of UWB modules 3A to 3F.
- the BLE module 2 arranged in close proximity to the failed UWB module 3 may be made to perform CS ranging, and the position of the portable device 9 may be detected based on the UWB ranging result by the normal UWB module 3 and the CS ranging result by the BLE module 2.
- the plurality of BLE modules 2 may be made to perform CS ranging, and the position of the portable device 9 may be detected from the CS ranging results. Furthermore, the position of the portable device 9 may be calculated based on the UWB ranging results by the normal UWB module 3, while the position of the portable device 9 may be calculated based on the CS ranging results by the multiple BLE modules 2, and the final position of the portable device 9 may be determined from the two calculated positions of the portable device 9. For example, if the calculated positions of the two portable devices 9 match, the matched position may be determined as the final position of the portable device 9.
- the position of the portable device 9 based on the CS ranging results by the multiple BLE modules 2 that are operating normally may be determined as the final position of the portable device 9. Note that, when multiple BLE modules 2 are made to perform CS ranging, one BLE module 2 may distribute channel information and timing information for performing CS ranging processing to the other BLE modules 2, so that the other BLE modules 2 may also be able to intercept (sniff) the CW signal transmitted from the portable device 9.
- BLE frequency hopping is performed after communication connection, so normally only the BLE module 2 that is connected for communication can capture the data signal from the mobile device 9.
- sniffing technology by providing channel information and timing information to other BLE modules 2, the other BLE modules 2 can also capture the data signal and CW signal from the mobile device 9.
- the other BLE modules 2 can detect the reception strength, reception phase, reception time, etc. of the signal from the mobile device 9 even without being connected for communication with the mobile device 9. Therefore, a configuration that applies sniffing technology has the advantage that multiple BLE modules 2 can perform CS ranging processing in parallel.
- the ECU 1 is configured as an independent electronic control device in the in-vehicle system VS, but the present invention is not limited to this.
- the function of the ECU 1 may be integrated with another ECU configured to realize another function.
- the UWB module 3 measures the RTT, which is the elapsed time from transmitting the UWB signal to receiving the response signal from the portable device 9, and calculates the device distance based on the RTT.
- the UWB module 3 can measure the arrival angle or arrival time difference of the UWB signal, and detect the position of the portable device 9 based on the measured arrival angle or arrival time difference. For example, when configured to measure the arrival angle of the UWB signal in addition to measuring the RTT of the UWB signal, it becomes possible to detect the position (or area) of the portable device 9 around the vehicle Hv with a smaller number of UWB modules 3.
- the BLE module 2 may obtain a single frequency phase difference for each frequency by an active two-way system or a passive two-way system, and use the single frequency phase difference to calculate the inter-frequency phase difference.
- an active two-way system or a passive two-way system
- the single frequency phase difference to calculate the inter-frequency phase difference.
- the active two-way method is a method in which an initiator and a reflector transmit and receive CW signals to each other, each detecting the phase difference between the transmitted signal and the received signal, and using these two phase differences to determine the single-frequency phase difference.
- the active two-way method includes a process in which the initiator and reflector transmit and receive CW signals to each other, and a process in which the reflector transmits the observed received phase ( ⁇ r) to the initiator.
- the initiator is the device that starts communication, in other words, the device that requests a response.
- the reflector is the device that returns the response.
- the BLE module 2 corresponds to the initiator
- the mobile device 9 corresponds to the reflector.
- the average value of ⁇ i and ⁇ r is the single frequency phase difference ( ⁇ ) in which the initial phase components of the initiator and reflector are offset.
- the active two-way method corresponds to a method of calculating the average value of the reception phase at the initiator and the reception phase at the reflector as the single frequency phase difference.
- the average value of ⁇ i and ⁇ r is taken as the single frequency phase difference.
- the single frequency phase difference can be calculated as ⁇ i + ⁇ r.
- the passive two-way system is also a system in which an initiator and a reflector transmit and receive CW signals to each other.
- the difference from the active two-way system is that the reflector reflects the receiving phase of the CW signal transmitted from the initiator in the initial phase of the transmitted signal before transmitting it.
- the receiving phase at the reflector is ⁇ r
- A represents the amplitude.
- n is a natural number and corresponds to the interval from when the reflector receives the CW signal to when it transmits the CW signal.
- the receiving phase observed by the initiator does not include the initial phase component of the reflector.
- the receiving phase observed by the initiator is the same value as when the CW signal is received after being reflected by a reflecting object such as a wall and returned.
- the initiator can calculate the single-frequency phase difference without obtaining the reception phase from the reflector.
- the passive two-way method has the advantage over the active two-way method that the reflector does not need to send a reception phase message.
- the single-frequency phase difference and therefore the inter-frequency phase difference can be calculated in a variety of ways.
- the BLE controller 23 may calculate the device distance using the RTT instead of/in addition to the inter-frequency phase difference.
- the RTT measured by the BLE controller 23 is the time from transmitting a predetermined BLE signal requesting a response to receiving a response signal from the mobile device 9. Transmitting and receiving a signal for measuring the RTT also corresponds to an example of CS ranging communication. Calculating the phase change coefficient or the RTT essentially corresponds to calculating the device distance. Therefore, the process of generating data indicating the device distance, such as the phase change coefficient or the RTT, based on the phase of the signal received from the mobile device 9 or the flight time, is also included in the concept of CS ranging processing. Calculating the distance also includes generating data indirectly indicating the distance.
- the communication method between the BLE module 2 and the mobile device 9 is not limited to BLE, and may be Bluetooth Classic, etc.
- Wireless communication conforming to Bluetooth includes both BLE communication and communication conforming to Bluetooth Classic.
- the present disclosure is applicable to various vehicles that run on roads. That is, the present disclosure can be mounted on various vehicles that can run on roads, such as four-wheeled vehicles, two-wheeled vehicles, three-wheeled vehicles, and vehicles with more than four wheels. Furthermore, the present disclosure can be applied to applications other than vehicles that require the detection of the position of a user holding a mobile device 9.
- the computer includes: A determination unit (S205, S215, S405, S430, S505) for determining whether or not wireless communication with the portable device can be performed using the first communication unit; and a determination unit (S250, S445, S465, S540, S
- BLE-CS Bluetooth Low Energy Channel Sounding
- the BLE-CS communication is a communication method for transmitting and receiving a continuous wave (CW) signal whose frequency changes periodically.
- the system further includes a country information acquisition unit (S210) that acquires country information indicating a country to which the location of the object belongs,
- the position detection system according to any one of technical ideas 1 to 3, wherein the determination unit (S215) determines whether or not wireless communication with the mobile device can be performed using the first communication unit based on the country information acquired by the country information acquisition unit.
- the determination unit (S205) determines that wireless communication with the mobile device is not possible using the first communication unit if the country information acquisition unit cannot acquire the country information.
- a frequency determination unit S220 that determines, when the determination unit determines that the country information acquisition unit can acquire the country information and that wireless communication with the mobile device can be performed using the first communication unit based on the acquired country information, determines a frequency band or frequency channel to be used for wireless communication of the first communication method based on the acquired country information.
- the determination unit determines the position of the portable device relative to the object using only the second communication signal when the judgment unit determines that wireless communication with the portable device cannot be performed using the first communication unit based on the country information or because the country information cannot be obtained.
- the first communication unit includes a plurality of anchors (3A to 3F) that are installed at different positions on the object and are capable of wireless communication with the portable device; The position detection system according to any one of technical ideas 1 to 3, wherein the determination unit (S405, S505) determines that wireless communication with the mobile device cannot be performed using the first communication unit when at least one of the multiple anchors is faulty.
- the decision unit (S540) determines the position of the portable device relative to the target object based on the first communication signal and the second communication signal via wireless communication using the anchors that are operating normally.
- the determination unit determines the location of the mobile device based on the first communication signal in an area where the location of the mobile device can be determined based on the first communication signal via wireless communication using the anchor that is operating normally, and determines the location of the mobile device using the second communication signal in an area where the location of the mobile device can be determined based on the first communication signal via wireless communication using the anchor that is malfunctioning.
- the location detection system described in Technical Idea 9 or 10.
- the plurality of anchors are divided into essential anchors that are involved in determining whether the location of the mobile device belongs to a required area and non-essential anchors that are not involved, according to the installation location of the anchors on the object;
- the determination unit (S430) determines that the failed anchor is the non-essential anchor and can wirelessly communicate with the portable device using the first communication unit, and the decision unit (S465) determines a position of the portable device relative to the object based on the first communication signal,
- the position detection system described in Technical Idea 9 wherein the determination unit determines that wireless communication with the portable device cannot be performed using the first communication unit if the failed anchor is the required anchor, and the decision unit (S445) determines the position of the portable device relative to the object based on the second communication signal.
- the object is a car
- the location detection system described in technical idea 12 wherein the required anchor is installed near the driver's seat of the vehicle, and the first communication signal by wireless communication using the required anchor is used to determine the location of the mobile device in the area near the driver's seat of the vehicle.
- the apparatus, system, and methods thereof described in the present disclosure may be realized by a dedicated computer comprising a processor programmed to execute one or more functions embodied in a computer program.
- the apparatus and methods described in the present disclosure may be realized by a dedicated hardware logic circuit.
- the apparatus and methods described in the present disclosure may be realized by one or more dedicated computers configured by a combination of a processor that executes a computer program and one or more hardware logic circuits.
- some or all of the functions provided by the BLE controller 23 may be realized as hardware.
- Aspects of realizing a certain function as hardware include aspects of realizing the function using one or more ICs, etc.
- the processor computation core
- the processor may be a CPU, an MPU, a GPU, a DFP (Data Flow Processor), etc.
- Some or all of the functions provided by the BLE controller 23 may be realized using any of a system-on-chip (SoC), an IC (Integrated Circuit), and an FPGA (Field-Programmable Gate Array).
- SoC system-on-chip
- IC Integrated Circuit
- FPGA Field-Programmable Gate Array
- the concept of IC also includes ASICs (Application Specific Integrated Circuits).
- computer programs may be stored in a computer-readable non-transitory tangible storage medium as instructions executed by a computer. Examples of program storage media that can be used include hard-disk drives (HDDs), solid-state drives (SSDs), and flash memory.
- HDDs hard-disk drives
- SSDs solid-state drives
- flash memory flash memory.
- the scope of this disclosure also includes forms such as programs for causing a computer to function as a BLE controller 23 or main controller 11, and non-transitory tangible storage media such as semiconductor memory on which these programs are stored.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Lock And Its Accessories (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025561913A JPWO2025121356A1 (https=) | 2023-12-07 | 2024-12-04 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023-206916 | 2023-12-07 | ||
| JP2023206916 | 2023-12-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025121356A1 true WO2025121356A1 (ja) | 2025-06-12 |
Family
ID=95981117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/042903 Pending WO2025121356A1 (ja) | 2023-12-07 | 2024-12-04 | 位置検出システム、位置検出方法、及びコンピュータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025121356A1 (https=) |
| WO (1) | WO2025121356A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7733855B1 (ja) * | 2025-06-30 | 2025-09-03 | Bx新生精機株式会社 | ゲート制御システム、ゲートシステム、制御方法及びプログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004274723A (ja) * | 2003-02-17 | 2004-09-30 | Sony Corp | 無線通信システム、無線通信装置及び無線通信方法 |
| JP2020122727A (ja) * | 2019-01-31 | 2020-08-13 | 株式会社Soken | 車両用位置推定システム |
| CN113091735A (zh) * | 2021-03-31 | 2021-07-09 | 中煤科工集团重庆研究院有限公司 | 矿井下人员定位的可靠性方法 |
| JP2021135165A (ja) * | 2020-02-27 | 2021-09-13 | 株式会社東海理化電機製作所 | 通信装置及び制御方法 |
| JP2022023635A (ja) * | 2020-07-27 | 2022-02-08 | 本田技研工業株式会社 | 車両制御システム、及び車両制御方法 |
| WO2023285036A1 (de) * | 2021-07-13 | 2023-01-19 | Mercedes-Benz Group AG | Verfahren zum autorisieren des zugangs zu einem kraftfahrzeug mittels eines mobilen elektronischen identifikationsgebers |
| JP2023054447A (ja) * | 2021-10-04 | 2023-04-14 | 株式会社東海理化電機製作所 | システム、通信装置、及び通信方法 |
| JP2023058256A (ja) * | 2021-10-13 | 2023-04-25 | 株式会社デンソー | 位置判定システム、位置判定方法 |
-
2024
- 2024-12-04 JP JP2025561913A patent/JPWO2025121356A1/ja active Pending
- 2024-12-04 WO PCT/JP2024/042903 patent/WO2025121356A1/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004274723A (ja) * | 2003-02-17 | 2004-09-30 | Sony Corp | 無線通信システム、無線通信装置及び無線通信方法 |
| JP2020122727A (ja) * | 2019-01-31 | 2020-08-13 | 株式会社Soken | 車両用位置推定システム |
| JP2021135165A (ja) * | 2020-02-27 | 2021-09-13 | 株式会社東海理化電機製作所 | 通信装置及び制御方法 |
| JP2022023635A (ja) * | 2020-07-27 | 2022-02-08 | 本田技研工業株式会社 | 車両制御システム、及び車両制御方法 |
| CN113091735A (zh) * | 2021-03-31 | 2021-07-09 | 中煤科工集团重庆研究院有限公司 | 矿井下人员定位的可靠性方法 |
| WO2023285036A1 (de) * | 2021-07-13 | 2023-01-19 | Mercedes-Benz Group AG | Verfahren zum autorisieren des zugangs zu einem kraftfahrzeug mittels eines mobilen elektronischen identifikationsgebers |
| JP2023054447A (ja) * | 2021-10-04 | 2023-04-14 | 株式会社東海理化電機製作所 | システム、通信装置、及び通信方法 |
| JP2023058256A (ja) * | 2021-10-13 | 2023-04-25 | 株式会社デンソー | 位置判定システム、位置判定方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7733855B1 (ja) * | 2025-06-30 | 2025-09-03 | Bx新生精機株式会社 | ゲート制御システム、ゲートシステム、制御方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025121356A1 (https=) | 2025-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7697343B2 (ja) | 車両用電子キーシステム、車両用認証装置 | |
| CN107343266B (zh) | 用于车辆的短程无线通信系统 | |
| JP7183830B2 (ja) | 車両用位置推定システム | |
| US20240255605A1 (en) | Position determination system and position determination method | |
| JP7601157B2 (ja) | デジタルキーシステム | |
| US9008917B2 (en) | Method and system for detecting proximity of an end device to a vehicle based on signal strength information received over a bluetooth low energy (BLE) advertising channel | |
| US11094150B2 (en) | Vehicle controlled polling reduction at mobile device based on motion status reported by mobile device | |
| US20210402955A1 (en) | Adaptive ble and uwb based connection rate control for mobile access devices of vehicular passive access systems | |
| US12570237B2 (en) | Position determination device, position determination method, and vehicular electronic key system | |
| JP2014134082A (ja) | 車両用システム、電子キー、携帯端末、及び車載装置 | |
| EP4632423A1 (en) | Position assessment device, position assessment system, wireless communication module, and computer program | |
| US20250058741A1 (en) | Vehicle control system, vehicle control program, and position confirmation device | |
| WO2025121356A1 (ja) | 位置検出システム、位置検出方法、及びコンピュータ | |
| WO2025121357A1 (ja) | 位置検出システム、位置検出方法、及びコンピュータ | |
| JP2023177066A (ja) | 車両用位置判定装置、車両用位置判定システム、位置判定方法 | |
| WO2025126924A1 (ja) | 通信接続管理システム、通信接続管理方法、及びコンピュータ | |
| JP2021156705A (ja) | 距離推定装置 | |
| JP2020088436A (ja) | 位置判定システム及び位置判定システムの制御方法 | |
| WO2025053137A1 (ja) | 位置判定システム、位置判定方法 | |
| WO2026028786A1 (ja) | 位置判定装置、位置判定システム、位置判定方法 | |
| WO2023106135A1 (ja) | 車両制御装置、車両制御方法、制御プログラム | |
| JP2024112120A (ja) | 位置判定装置、位置判定システム | |
| JP2023110509A (ja) | デジタルキーシステム及び省電力化方法 | |
| WO2025121358A1 (ja) | 位置判定システム、位置判定装置、及び位置判定方法 | |
| JP2020127134A (ja) | 通信システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24900650 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025561913 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025561913 Country of ref document: JP |