WO2025028361A1 - 情報処理方法、プログラム、及び情報処理装置 - Google Patents
情報処理方法、プログラム、及び情報処理装置 Download PDFInfo
- Publication number
- WO2025028361A1 WO2025028361A1 PCT/JP2024/026445 JP2024026445W WO2025028361A1 WO 2025028361 A1 WO2025028361 A1 WO 2025028361A1 JP 2024026445 W JP2024026445 W JP 2024026445W WO 2025028361 A1 WO2025028361 A1 WO 2025028361A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- dimensional
- space
- identification information
- map data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
- G06T17/05—Geographic models
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
Definitions
- the present invention relates to an information processing method, a program, and an information processing device.
- the present invention aims to provide new use cases for spatial IDs assigned to each three-dimensional space in three-dimensional map data, or to link information to spatial IDs to improve service content or provide new services.
- An information processing method is an information processing method executed by an information processing device including one or more processors, in which the one or more processors execute the following: acquiring three-dimensional map data divided into predetermined three-dimensional spaces, with each three-dimensional space being assigned an identification information; associating at least temporal information with a different time or dimensional information with a different dimension with each identification information of each of the three-dimensional spaces; setting each processing target space including one or more three-dimensional spaces; and outputting to a moving body at least one of the identification information assigned to the three-dimensional space in each processing target space and the temporal information and/or the dimensional information associated with the identification information.
- the present invention can provide new use cases for the spatial IDs assigned to each three-dimensional space in the three-dimensional map data, or can link information to the spatial IDs to improve service content or provide new services.
- FIG. 2 is a diagram illustrating an example of a hierarchical structure of map data according to an embodiment.
- FIG. 2 is a diagram illustrating an example of a hierarchical structure of map data according to an embodiment.
- 11A to 11C are diagrams illustrating an example of a process of dividing a three-dimensional space and a process of assigning an ID according to an embodiment.
- FIG. 11 is a diagram illustrating an example of wide area identification information and narrow area identification information according to an embodiment.
- FIG. 2 is a diagram illustrating an example of a feature code according to an embodiment.
- FIG. 11 is a diagram illustrating an example of common information of feature data according to an embodiment.
- FIG. 1 illustrates an example of associating identified lanes with buildings and facilities according to one embodiment.
- FIG. 1 illustrates an example of associating identified lanes with buildings and facilities according to one embodiment.
- FIG. 1 illustrates an example of associating identified lanes with buildings and facilities according to one embodiment.
- FIG. 1 illustrates an example
- FIG. 1 is a diagram illustrating an example of an information processing system 1 according to an embodiment.
- FIG. 1 is a diagram illustrating an example of a configuration of an information processing device 10 according to an embodiment.
- FIG. 13 is a diagram illustrating an example of data related to a space ID according to an embodiment.
- FIG. 2 is a diagram illustrating an example of an information processing device 30 according to an embodiment.
- 5 is a flowchart illustrating an example of processing of an information processing device 10 according to an embodiment.
- FIG. 11 is a diagram illustrating an example of a configuration of an information processing device 10a according to a second embodiment. A figure showing an example of a route of an aircraft 20B according to Example 2.
- 11 is a flowchart illustrating an example of a process of an information processing device 10a according to a second embodiment.
- FIG. 13 is a diagram illustrating an example of a configuration of an information processing device 10b according to a third embodiment.
- FIG. 13 is a diagram showing an example of data related to a space ID in the third embodiment.
- 13 is a flowchart illustrating an example of a process of an information processing device 10b according to a third embodiment.
- 13 is a flowchart illustrating another example of the process of the information processing device 10b according to the third embodiment.
- FIG. 13 is a diagram illustrating an example of the configuration of an information processing device 10c according to a fourth embodiment.
- FIG. 13 is a diagram showing an example of data relating to a space ID in the fourth embodiment.
- 13A to 13C are diagrams illustrating examples of three-dimensional spaces of a building or an underground space in Example 4.
- FIG. 13 is a flowchart illustrating an example of a process of an information processing device 10c according to a fourth embodiment.
- FIG. 13 is a diagram illustrating an example of the configuration of an information processing device 10d according to a fifth embodiment.
- FIG. 13 is a diagram showing an example of data relating to a space ID in the fifth embodiment.
- 13 is a flowchart illustrating an example of a process of an information processing device 10d according to a fifth embodiment.
- FIG. 23 is a diagram illustrating an example of the configuration of an information processing device 10e according to a sixth embodiment.
- FIG. 23 is a diagram showing an example of a distribution of people in a three-dimensional space in the sixth embodiment.
- 13 is a flowchart illustrating an example of a process of an information processing device 10e according to a sixth embodiment.
- map data used in this embodiment is, for example, high-precision three-dimensional map data used for automatic driving and the like.
- this map data is map data called a dynamic map that is provided in real time and to which more dynamic information such as information on surrounding vehicles and traffic information is added.
- the map data used in this embodiment is, for example, classified into four hierarchical levels.
- FIGS. 1 and 2 are diagrams showing an example of a hierarchical structure of map data according to one embodiment of the present invention.
- the map data is classified into static information SI1, semi-static information SI2, semi-dynamic information MI1, and dynamic information MI2.
- Static information SI1 is high-precision three-dimensional basic map data (high-precision three-dimensional map data) that includes road surface information, lane information, three-dimensional structures, etc., and is composed of three-dimensional position coordinates and linear vector data that indicate features.
- Quasi-static information SI2, semi-dynamic information MI1, and dynamic information MI2 are dynamic data that change from moment to moment, and are data that are superimposed on static information based on position information.
- Semi-static information SI2 includes traffic regulation information, road construction information, wide-area weather information, etc.
- Semi-dynamic information MI1 includes accident information, congestion information, narrow-area weather information, etc.
- Dynamic information MI2 includes ITS (Intelligent Transport System) information, including information on nearby vehicles, pedestrians, traffic lights, etc.
- the three-dimensional map data in this embodiment may be three-dimensional map data generated by measurement using an MMS (Mobile Mapping System), or may be three-dimensional map data generated from satellite images, and the generation process is not particularly important.
- the three-dimensional map data may be three-dimensional map data generated by measurement using a drone, fixed-point measurement, measurement using an aerial LiDAR, or measurement using satellite/SAR images.
- the three-dimensional map data is divided into predetermined three-dimensional spaces according to predetermined criteria, and multiple three-dimensional spaces are generated.
- the shape of the three-dimensional space is not particularly limited, but the shape of the three-dimensional space may be specified according to the model of the three-dimensional map data. For example, from the standpoint of ease of division and efficiency of management, a rectangular parallelepiped shape (including an approximately rectangular parallelepiped shape) is preferable, and a cubic shape (including an approximately cubic shape) is even more preferable.
- the three-dimensional space to be divided may not only include the surface of the earth and above the sea, but also underground and underwater.
- the focus is on the height direction
- the three-dimensional map data is divided into specified three-dimensional spaces, and identification information is assigned to each three-dimensional space.
- the identification information only needs to be information that can identify each three-dimensional space, and it only needs to be assigned according to specified rules. From the perspective of data management, it is also preferable that the identification information be assigned according to rules that allow surrounding three-dimensional spaces, or three-dimensional spaces within the same area, to be easily derived.
- Fig. 3 is a diagram showing an example of a process of dividing a three-dimensional space and a process of assigning an ID according to an embodiment.
- a three-dimensional space area of the Japanese land is divided into predetermined three-dimensional spaces.
- Japan approximately 380,000 km 2
- An altitude of 3000 m is the maximum flight altitude of a helicopter without oxygen supply, but other altitude values may be used.
- the area to be divided is divided into cubes with each side being 1 km, for example.
- the unit of each side does not have to be 1 km, and may be 5 km, 500 m, 100 m, etc.
- the shape of the three-dimensional space may be a rectangular parallelepiped or the like instead of a cube.
- Each three-dimensional space is assigned identification information.
- two types of IDs wide area identification information ID1 and narrow area identification information ID2 may be assigned as identification information (space ID) for the three-dimensional space.
- the wide area identification information ID1 is, for example, an ID that identifies each three-dimensional space and is also a management ID for managing each three-dimensional space.
- the narrow area information ID2 contained within each three-dimensional space it is possible to reduce the number of digits in the narrow area information ID2 and reduce the communication capacity when distributing the narrow area information ID2.
- the narrow area identification information ID2 is, for example, an ID that targets a specific district and is managed by a specific application, associated with the wide area identification information ID1. Furthermore, the narrow area information ID2 is information that identifies an object, and its persistence may be guaranteed. Basically, one ID is assigned to one object, but if the acquisition criteria are different even for the same object, it may be managed as a different ID.
- the specific district may be, for example, a densely inhabited district.
- the narrow area identification information ID2 may also be used for the purpose of managing necessary information, for example, in the operation of automated mobility.
- a specified application is AD (Autonomous Driving)/ADAS (advanced driver assistance system) or PMV (Personal Mobility Vehicle)
- roadways, lanes, sidewalks, signs, road markings, buildings, etc. are used as objects of the narrow area identification information, and IDs (identification information) are assigned to these.
- IDs identification information
- a specified application is an aircraft such as a drone, air routes, emergency evacuation areas, flight restriction areas, etc. are used as objects of the narrow area identification information, and IDs are assigned to these.
- a specified application is snow removal, lanes, sidewalks, manholes, bridge joints, etc. are used as objects of the narrow area identification information, and identification information is assigned to these.
- narrow area identification information ID2 include an ID assigned to a specific position of a corridor used for routing an aircraft, and an ID for feature data used for autonomous driving.
- the feature data shown in Figure 4 is a lane.
- the ID assigned to this lane and the ID of the corridor are associated with a wide area ID.
- each divided three-dimensional space may be changed as appropriate based on the purpose of the application, etc.
- the three-dimensional space may also be subdivided or consolidated depending on the purpose.
- a cube such as 2x2x2 (V10) or 3x3x3 (V20), or a rectangular parallelepiped such as 2x2x1 or 3x3x2 may be used as the space to be processed by the application.
- FIG. 4 is a diagram showing an example of wide-area identification information and narrow-area identification information according to one embodiment.
- the wide-area identification information for the three-dimensional space is "54N35123456.” This is an example of information that combines the UTM zone "54,” the north latitude "N35,” and a six-digit number (a number indicating longitude and altitude).
- the roadway has three lanes, and seven links connect each lane.
- the narrow area identification information for the lanes is generated by first expressing it as the wide area identification information "54N35123456" and then linking it to the ID of the feature data.
- the ID portion of the feature data linked to the wide area identification information may be called narrow area identification information.
- the nine digits of "ABCDEFGHI” contain common information for the feature data (described later using Figures 6 and 7) and data representing the feature data for the lane, and in the "10001" information, the 10th digit "1" indicates lane 1, and the 11th to 14th digits "0001" indicate the link number.
- This makes it possible to reduce the number of digits in the feature data ID (narrow area identification information) compared to assigning IDs to feature data without distinguishing between three-dimensional spaces.
- the information assigned to the connection number in Figure 4 indicates the lane link ID (narrow area identification information for this lane link).
- FIG. 5 is a diagram showing an example of a feature code according to one embodiment.
- a feature code is data related to the identification of a feature, and is, for example, data that is included in the common information of feature data.
- a feature code is associated with a feature name.
- the feature code "01” indicates the feature name “lane link (lane link outside intersection)” and the feature code “02” indicates the feature name “lane link (lane link inside intersection).”
- a lane link may also be written as a "lane center line” and includes multiple constituent points.
- the type of feature can also be determined by the first digit of the feature code. For example, if the first digit of the feature code is "0", the feature is a lane link-related feature. If the first digit is "2", the feature is a feature painted on the road (division line, multiple division line, shoulder edge, tunnel boundary edge, etc.). If the first digit is "3", the feature is an intersection and road marking (regulatory sign, directional sign, other marking, etc.). If the first digit is "4", the feature is a road sign (guide sign, warning sign, regulatory sign, directional sign, other sign, indistinguishable sign, etc.). If the first digit is "5", the feature is a vehicle traffic light (main signal, auxiliary signal, arrow, etc.).
- FIG. 6 is a diagram showing an example of common information of feature data according to one embodiment.
- the common information of the feature data includes intended use information, feature code, material identification information, positioning status information, upper status information, imaging control information, etc.
- the intended use information includes information specifying whether the AD/ADAS will be used on an exclusive motor vehicle road or on a general road.
- An exclusive motor vehicle road refers to roads where vehicles move sideways in a parallel running state at branching and merging sections, etc.
- the feature code includes any of the codes shown in Figure 5.
- the material identification information, positioning status information, and upper state information are included in a specified field (the LN (Line Number) field shown in Figure 6) of the feature data shown in Figure 6.
- Figure 6 shows an example in which all of the material identification information, positioning status information, and upper state information are included in the feature data.
- the material identification information shown in Figure 6 includes information for identifying whether the measurement is by MMS, drone measurement, fixed point measurement, measurement by airborne LiDAR, or measurement by satellite imagery/SAR images.
- the positioning status identification information includes information for identifying whether the measurement is unpositioned, in a multipath environment, normal positioning (single positioning), normal positioning (sub-m class), or high-precision positioning (cm class).
- the upper status information includes information for identifying whether the measurement is closed, partially open sky, or open sky.
- the imaging control information uses a histogram of pixel values in the captured image to identify highlight blown out areas, blackout areas, etc.
- the imaging control information may also include aperture value, ISO value, shutter speed, etc.
- the identification information for the feature data should be linked to the common information shown in Figure 6, and information specific to the feature data should be added from the seventh digit onwards.
- FIG. 7 is a diagram showing an example of associating a specified lane with buildings and facilities according to one embodiment of the present invention.
- the position information of the first building which is a specific building and facility, is expressed as the difference (X1, Y1, Z1) between the entrance/exit of the first building and a constituent point of the lane link represented by the lane link ID "XXXXX123456ABCDEFGHI1002".
- the building facility data of the first building as feature data is generated as ID "XXXXX123456ABCDEFGHI1002X1Y1Z1" by adding the difference (X1, Y1, Z1) to the lane link ID "XXXXX123456ABCDEFGHI1002" as relative position information.
- the building facility data for the first building may include any information related to the first building, such as the building type, shape, and size of the first building, as data linked to the ID.
- a new building facility data ID "XXXXX123456ABCDEFGHI1002X1Y1Z1" was generated for the first building, and the building facility information for the first building was linked to this ID to generate the building facility data.
- these may be treated as extended data for the lane link ID "XXXXX123456ABCDEFGHI1002".
- the building facility data may be linked to the lane link ID "XXXXX123456ABCDEFGHI1002" of the constituent points of the lane link, and the building facility data may be included in the feature data for that lane link ID.
- the relative position information may be converted to (x1, y1, z1) by reducing the amount of information (number of digits) taking into account a certain resolution, for example, within the range where the impact on the data used by the driving assistance system and autonomous driving system is small, and the building facility data for the first building may be "XXXXX123456ABCDEFGHI1002x1y1z1".
- FIG. 8 is a diagram showing an example of the information processing system 1 according to an embodiment of the present invention.
- the information processing system 1 includes information processing devices 10A, 10B, and 10C that manage and process space IDs, and moving objects 20A, 20B, and 20C that are controlled using the space IDs, and each device is connected to be able to communicate data via a network.
- information processing devices 10A, 10B, and 10C When there is no need to distinguish between the information processing devices 10A, 10B, and 10C, they may be referred to as information processing devices 10, and when there is no need to distinguish between the mobile bodies 20A, 20B, and 20C, they may be referred to as mobile bodies 20.
- the movement of the mobile body 20 is controlled by a spatial ID that is managed and processed by the information processing device 10.
- the spatial ID is used to set the routing (path) of the mobile body 20 from the departure point to the destination, to control the movement of the mobile body 20, and when displayed on the display unit of the mobile body 20.
- the departure point includes, for example, the current location and a specified point.
- the spatial ID can also be used for pedestrian route guidance and statistics related to three-dimensional maps, in addition to controlling the mobile body 20.
- ⁇ Configuration of information processing device 10> 9 is a diagram showing an example of the configuration of an information processing device 10 according to an embodiment of the present invention.
- the information processing device 10 includes one or more processors (CPU: Central Processing Unit) 110, one or more network communication interfaces 120, a storage device 130, a user interface 150, and one or more communication buses 170 for interconnecting these components.
- the user interface 150 may be connected via a network.
- Storage device 130 may be, for example, a high-speed random access memory such as a DRAM, SRAM, or other random access solid-state storage device.
- Storage device 130 may also be a non-volatile memory such as one or more magnetic disk storage devices, optical disk storage devices, flash memory devices, or other non-volatile solid-state storage devices.
- Storage device 130 may also be a non-transitory computer-readable recording medium.
- storage device 130 may be one or more storage devices located remotely from processor 110.
- storage device 130 stores programs, modules, and data structures, or a subset thereof, executed by processor 110.
- the storage device 130 stores data used by the information processing system 1.
- the storage device 130 stores three-dimensional map data and data related to this three-dimensional map data.
- three-dimensional map data, feature data, a spatial ID, information associated with the spatial ID, etc. are stored in the storage device 130.
- an example of three-dimensional map data includes static information SI1, semi-static information SI2, semi-dynamic information MI1, and dynamic information MI2, as described above with reference to FIG. 2, and each piece of information may be associated with each other.
- Static information SI1 includes high-precision three-dimensional map data (HD (High Definition) map), which is divided into three-dimensional spaces as described above, and a spatial ID is assigned to each three-dimensional space.
- This spatial ID is basic information when an application uses this high-precision three-dimensional map data.
- the processor 110 that executes the processes related to the generation of 3D map data according to this embodiment will be described.
- the processor 110 executes the programs stored in the storage device 130 to configure the map control unit 212, the acquisition unit 113, the association unit 114, the setting unit 115, and the output unit 116.
- the processor 110 controls the processing of each component, which will be described later, and executes the processing related to generating map data.
- the map control unit 112 uses various data to control processing related to spatial IDs assigned to each three-dimensional space of the three-dimensional map data. For example, the map control unit 112 controls processing such as dividing high-precision three-dimensional map data into specified three-dimensional spaces, assigning a spatial ID to each three-dimensional space, and associating information with the spatial ID.
- the acquisition unit 113 acquires three-dimensional map data that is divided into predetermined three-dimensional spaces, with each three-dimensional space being assigned identification information (spatial ID). For example, the acquisition unit 113 acquires from the storage device 130 three-dimensional map data in which a spatial ID is assigned to each three-dimensional space, as shown in FIG. 3.
- the associating unit 114 at least associates time information having different times or dimensional information having different dimensions with each space ID of each three-dimensional space.
- the time information includes, for example, weather information and traffic signal information having information that varies with time
- the dimensional information includes two-dimensional map data, for example, existing SD (Standard Definition) maps and base registry data.
- the base registry data is, for example, basic social data on people, corporations, land, buildings, qualifications, etc. that is registered and published by public institutions and referenced in various situations, and includes data that is the backbone of society and ensures accuracy and up-to-dateness.
- the base registry data includes, for example, master data on addresses and locations, real estate IDs, etc.
- the associating unit 114 may also associate other static information with each space ID.
- the other static information includes, for example, no-entry area information and facility information.
- the setting unit 115 sets each processing target space including one or more three-dimensional spaces. For example, if the moving body 20 is a small-sized flying object such as a drone, the setting unit 115 may set the smallest unit of three-dimensional space as the processing target space. Also, if the moving body 20 is an flying object for personal use, the setting unit 115 may set a 2x2x2 voxel (V10 shown in Figure 3) as the processing target space. The setting unit 115 may set the processing target space according to the type, size, location of movement (urban area, mountainous area, etc.) of the moving body 20, etc. The specified target spaces do not necessarily all need to be the same size.
- the output unit 116 outputs to the moving body 20 at least one of identification information (space ID) assigned to the three-dimensional space within each processing target space and time information, dimensional information, and/or other static information associated with this identification information.
- space ID identification information assigned to the three-dimensional space within each processing target space and time information, dimensional information, and/or other static information associated with this identification information.
- the output unit 116 outputs to the moving body 20 that is the object of movement control at least one of the space ID used for movement control of the moving body 20 and time information, dimensional information, and/or other static information associated with this space ID.
- the spatial ID may be used to set a route from the departure point of the mobile body 20 to the destination, time information such as weather information may be used to select a route for the mobile body 20, and dimensional information such as an SD map may be used to control the movement of vehicles traveling on roads.
- the acquisition unit 113 may acquire traffic light information and the like contained in dynamic information distributed in V2N (Vehicle to Network), and the association unit 114 may associate the acquired traffic light information and the like with an SD map via the spatial ID. This allows existing vehicles to use an SD map associated with traffic light information contained in dynamic information.
- V2N Vehicle to Network
- the above process makes it possible to appropriately control the movement of mobility such as the moving body 20 using the spatial ID and the time information or dimensional information linked to the spatial ID. Therefore, by linking information to the spatial ID, it becomes possible to improve the content of services or provide new services.
- Fig. 10 is a diagram showing an example of data related to a space ID according to an embodiment of the present invention.
- space position information, dynamic information, semi-dynamic information, an SD map, etc. are associated with the space ID.
- the space ID may be generated as described above with reference to Figures 3 to 7, or may be generated by other methods.
- the space IDs generated by the information processing device 10 are assigned in order to each of the three-dimensional spaces into which the three-dimensional map data is divided.
- Spatial position information includes information indicating a position in three-dimensional space, such as information indicating the position of a representative point of the three-dimensional space (a point that specifies the three-dimensional space, such as a center point or a point that constitutes a corner of the three-dimensional space).
- Dynamic information includes dynamic information of vehicles, pedestrians, etc. contained in the three-dimensional space.
- Semi-dynamic information includes accident information, weather information, etc. that changes over time.
- SD maps include two-dimensional map data.
- the size of the three-dimensional space and other data may be associated with the spatial ID.
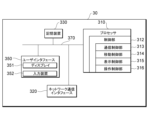
- ⁇ Configuration of information processing device 30> 11 is a diagram showing an example of an information processing device 30 according to an embodiment of the present invention.
- the information processing device 30 is a processing device provided in a mobile body 20.
- the information processing device 30 includes one or more processors (e.g., CPUs) 310, one or more network communication interfaces 320, a storage device (storage unit) 330, a user interface 350, and one or more communication buses 370 for interconnecting these components.
- the user interface 350 includes a display 351 and an input device (such as a pointing device) 352.
- an input device such as a pointing device
- the storage device 330 may be, for example, a high-speed random access memory (primary storage device) such as a DRAM, SRAM, or other random access solid-state storage device.
- the storage device 330 may also be a non-volatile memory (secondary storage device) such as one or more magnetic disk storage devices, optical disk storage devices, flash memory devices, or other non-volatile solid-state storage devices.
- the storage device 330 may also be a non-transitory computer-readable recording medium.
- the storage device 330 may be either a primary storage device (memory) or a secondary storage device (storage), or may include both.
- the storage device 330 stores data and programs used by the information processing system 1.
- the storage device 330 stores application programs for the information processing device 30 in the information processing system 1.
- the processor 310 constitutes the control unit 312 by executing a program stored in the storage device 330.
- the control unit 312 performs processing related to movement control, for example, by executing an application for the mobile object 20 that has been installed.
- the control unit 312 has a communication control unit 313, a movement control unit 314, a display control unit 315, and an operation control unit 316.
- the communication control unit 313 transmits and receives data to and from the information processing device 10 via the network communication interface 320. For example, the communication control unit 313 acquires at least one piece of information, including a spatial ID and time information and/or dimensional information, transmitted from the information processing device 10. The communication control unit 313 transmits to the information processing device 10 destination information input by the input device 352 and acquired by the operation control unit 316, and departure point information identified by a GPS function or the like.
- the communication control unit 313 also outputs to the information processing device 10 information selected or set using the screen displayed on the display 351, a specified request, work information related to movement control, and the like.
- the space ID transmitted is the space ID of the space to be processed, and when the space to be processed is composed of multiple three-dimensional spaces, it may be a representative value of the multiple three-dimensional spaces, for example, the space ID of a space in the center of the space to be processed or a space including a specified corner (such as the upper left).
- the movement control unit 314 controls the movement of the mobile body 20.
- the movement control unit 314 controls the movement along a route (route from the departure point to the destination) combined with a spatial ID, and also selects a route and adjusts the movement speed of the mobile body 20 using time information (dynamic information or semi-dynamic information) associated with the spatial ID, and controls the movement route of the vehicle using dimensional information.
- time information dynamic information or semi-dynamic information
- the display control unit 315 controls the display 351 to display a routing screen related to the travel route, etc., based on each piece of information acquired by the communication control unit 313.
- the display control unit 315 also controls the display 351 to display a destination setting screen, and a screen displaying time information and dimensional information.
- the operation control unit 316 accepts user operations on UI parts displayed on each screen, and transmits operation information to an application of the information processing device 30 or outputs the operation information to the information processing device 10. For example, the operation control unit 316 outputs each piece of information related to the movement of the mobile object 20 that has been selected, set, or input by an employee or the like to the information processing device 10.
- Fig. 12 is a flowchart showing an example of the process of the information processing device 10 according to an embodiment. Note that each process may be parallelized or the order may be changed without departing from the spirit of the present invention.
- step S102 the acquisition unit 113 acquires three-dimensional map data that is divided into predetermined three-dimensional spaces and in which identification information (space ID) is assigned to each three-dimensional space.
- the acquisition unit 113 may acquire three-dimensional map data that is assigned a space ID from the storage device 130.
- the association unit 114 associates at least time information having different times or dimensional information having different dimensions with each piece of identification information for each three-dimensional space.
- the time information is, for example, at least one of the dynamic information or semi-dynamic information described above, and the dimensional information is, for example, an SD map.
- step S106 the setting unit 115 sets each processing target space including one or more three-dimensional spaces.
- the setting unit 115 may set the size of the processing target space according to the type of the moving body 20, for example.
- step S108 the output unit 116 outputs to the moving body at least one of the identification information (space ID) assigned to the three-dimensional space in each processing target space, and the time information and/or dimensional information associated with the identification information, and other static information.
- the moving body 20 controls its movement using the space ID, and at least one of the time information and/or dimensional information associated with the space ID, and other static information.
- Example 1 shows a specific example of information associated with a space ID.
- the information can be used to control the movement of a moving object 20, or a new use case can be provided by using the information that can be changed in real time.
- ⁇ Configuration> The configurations of the information processing device 10 and the information processing device 20 in the first embodiment are similar to those shown in Fig. 9 and Fig. 11, respectively.
- the dynamic information or semi-dynamic information described above can be associated with an HD map, but a means for such association has not been established.
- dynamic or quasi-dynamic information of high-precision three-dimensional map data is identified based on the objects and positions contained in the three-dimensional space, and the identified dynamic or quasi-dynamic information is associated with a space ID of the three-dimensional space.
- identification information or captured images of an autonomous vehicle that runs using an HD map may be used to obtain vehicle congestion information in a specified area in real time and associated with the space ID, or the density of pedestrians in a specified area obtained in real time from another server may be associated with the space ID.
- the association unit 114 can determine the quality and quantity of dynamic information held by various businesses and select appropriate dynamic information each time an association is made. Furthermore, the association unit 114 may associate only the necessary information from among the dynamic information or quasi-static information held by the HD map with the space ID. This makes it possible to associate various types of dynamic information or quasi-dynamic information with the HD map via the space ID, improving usability.
- a police officer, road administrator, or the like can operate a tablet device at the scene of an accident or fallen object to set a restricted area in three-dimensional space units. For example, each three-dimensional section including the scene is displayed on the tablet device, and the police officer, road administrator, or the like can select the area where restrictions are in place by tapping, for example.
- the association unit 114 associates the selected area with the space ID of that three-dimensional space as restricted area information. This restricted area information may also be associated with the space ID as dynamic information.
- the output unit 116 may output the restricted area information associated with the space ID to the moving body 20. This allows the moving body 20 to properly grasp the restricted area information, thereby enabling safe control of autonomous mobility and smooth route changes, etc.
- the association unit 114 in this system can set restricted area information such as traffic restricted areas in narrow-area voxel units, and the output unit 116 can realize a system that distributes the restricted area information to road users such as mobile objects 20.
- the association unit 114 in the first embodiment associates, for example, clouds, fog, rain, snow, or volcanic smoke in the sky with a space ID of a three-dimensional space, thereby enabling the information processing device 10 to set a three-dimensional space in which control of the moving body 20 may be impaired.
- the acquisition unit 113 acquires weather information from the database of the Japan Meteorological Agency to obtain information regarding the movement of clouds, and the association unit 114 associates information indicating the presence of clouds with the space ID of the three-dimensional space in which the clouds exist.
- the association unit 114 may distinguish between information indicating volcanic smoke that can be acquired from a meteorological satellite center, information indicating rain that is included in the weather information, information indicating fog, and other information and associate it with the space ID.
- the mobile body 20 may obtain information indicating these clouds, fog, rain, snow, or volcanic smoke together with a space ID and use this information for movement control. For example, the mobile body 20 may set a route while avoiding three-dimensional spaces where there are clouds, fog, rain, snow, smoke, or other obstacles to flight.
- the unit of route setting when the mobile body 20 sets a route is preferably the processing target space, but route setting may be performed in the smallest unit of three-dimensional space.
- the space ID to which the dynamic information or semi-dynamic information, accident information, etc., or weather information is associated may be at least one space ID of the processing target space, or may be the space ID of the smallest unit of three-dimensional space.
- the spatial ID by linking information such as meteorological information to the spatial ID, it is possible to improve the content of services such as route setting, or provide new services such as visualizing the conditions in the sky (clouds, fog, rain, snow, smoke, etc.).
- Example 2 shows a specific example of controlling an air vehicle using a space ID.
- the moving body 20 in Example 2 is an air vehicle 20B including a drone, and is associated with a space ID.
- ⁇ Configuration> 13 is a diagram showing an example of the configuration of an information processing device 10a in Example 2.
- the configuration of an information processing device 20 is similar to the configuration shown in FIG.
- BVLOS visual line of sight
- the aircraft 20B is made to be able to appropriately fly beyond visual line of sight.
- the components of the information processing device 10a shown in FIG. 13 that perform the same processes as the components of the information processing device 10 shown in FIG. 9 are given the same reference numerals, and the following describes the processes that differ from the above embodiment and example.
- the map control unit 112a, acquisition unit 113a, association unit 114a, output unit 116a, and aircraft control unit 301 shown in FIG. 13 are configured and executed by the processor 110a.
- the output unit 116a shown in FIG. 13 selects each processing target space from the departure point to the destination, and outputs route information including each identification information (each space ID) of each selected processing target space to the aircraft 20B.
- the route information includes information linking the space IDs from the departure point to the destination set by the aircraft control unit 301.
- the flying object control unit 301 selects a space to be processed based on the departure point information and destination information of the flying object 20B acquired by the acquisition unit 113a, and links and combines the space IDs of the selected spaces to be processed so that each space ID can be distinguished from the departure point to the destination.
- the flying object control unit 301 sets a route so as to satisfy the criteria for flight beyond visual line of sight.
- the aircraft control unit 301 holds standard information for flights beyond visual line of sight, and sets a route to satisfy this standard information.
- the aircraft control unit 301 selects skies above locations where third parties are unlikely to be present (mountains, ocean areas, rivers, forests, agricultural land, etc.). Locations where third parties are unlikely to be present can be identified by feature data on HD maps associated with the spatial ID, etc.
- the aircraft control unit 301 outputs the route information of the combined space ID to the output unit 116a.
- the route information may include not only the space ID, but also information associated with the space ID, such as the dynamic or semi-dynamic information associated in Example 1, accident information, or weather information.
- the association unit 114a may also associate various information, such as ground surface information (whether or not there is air rights, etc.), tide information, communication strength, multipath information, surrounding obstacle information, emergency landing sites, base/training airspace, and airspace for dropping rockets, parts, etc., with the space ID.
- the aircraft control unit 301 sets a route based on the various information associated with the space ID of the three-dimensional space. This makes it possible to set a space that meets the criteria for beyond visual line of sight flight, and supports beyond visual line of sight flight of the aircraft 20B. As a result, autonomous flight beyond visual line of sight is made possible by aircraft control and the operation management system using the set route.
- the flying object control unit 301 also enables a pre-flight simulation that combines weather and air current forecast information associated with the space ID with the flight plan of the flying object 20B.
- the flying object control unit 301 also grasps the energy consumption status of the flying object 20B due to air currents, etc., and can use this information for planning energy refueling en route, reconsidering the flight route, etc.
- Regarding the energy consumption of the flying object 20B by having the learning model learn the relationship between air currents and consumed energy as learning data, the flying object control unit 301 becomes able to predict the energy consumption by inputting the air current data into the learning model.
- the association unit 114a may also associate with the space ID of each processing target space in the air up to a specified distance (e.g., 300 m) from the ground surface whether or not it is above private land.
- the map control unit 112a manages public/private information regarding whether or not the space on the ground is private land associated by the association unit 114a. For example, if a specified area is changed from public land to private land, the map control unit 112a changes the public/private information based on setting change information from an administrator, etc.
- the flying object control unit 301 selects a three-dimensional space other than the airspace above private property based on the public/private information associated with the space ID of the three-dimensional space.
- the output unit 116a may output to the flying object 20B the space ID selected based on whether or not the space is above private property.
- the output unit 116a may also output the public/private information along with the space ID to the flying object 20B.
- FIG. 14 is a diagram showing an example of a route for the flying object 20B according to the second embodiment.
- the flying object control unit 301 sets the route for the flying object 20B based on weather information, etc., associated with the space ID of the three-dimensional space.
- FIG. 14 shows the route C10 set by the flying object control unit 301.
- the processing target space is the smallest unit of three-dimensional space, but a processing target space of 2x2x2 or 3x3x3, etc., may be used depending on the size of the flying object 20B and the type of ground.
- aircraft control unit 301 can refer to the public/private information associated with the space ID of the three-dimensional space, and set the route by selecting the three-dimensional space of the public/private information indicating that it is public land. This makes it possible to prevent aircraft 20B from flying above private property without permission, for example.
- Fig. 15 is a flowchart illustrating an example of a process of the information processing device 10a according to Example 2.
- the example illustrated in Fig. 15 illustrates a process of setting a route for the flying object 20B.
- step S202 the acquisition unit 113a acquires departure point information and destination information of the flying object 20B.
- the acquisition unit 113a may acquire the departure point information and destination information of the flying object 20B from a device that operates the flying object 20B.
- step S204 the aircraft control unit 301 selects the space ID of the processing target space or the three-dimensional space from the departure point information to the destination information, and sets a route by combining the selected space IDs.
- step S206 the output unit 116a outputs the selected space ID as route information. This enables the flying object 20B to obtain the route information from the information processing device 10 and arrive at the destination by sequentially tracing the processing target space or the three-dimensional space indicated by the space ID included in the route information.
- the route of the flying object can be set using the space ID, and further, by using information associated with the space ID, such as public or private information, a more appropriate route can be set. Furthermore, according to the second embodiment, it becomes possible to provide new services, such as visualizing information on whether the sky is private or not.
- Example 3 shows a specific example of generating a map separately using a space ID.
- map data for a specific company is generated or customized.
- the moving body 20 in Example 3 is a moving body 20C such as a remotely controlled AGV (Automatic Guided Vehicle) or a robot, or an air vehicle 20B.
- the moving body 20 also includes a smartphone capable of communicating location information.
- ⁇ Configuration> 16 is a diagram illustrating an example of the configuration of an information processing device 10b according to the third embodiment.
- the configuration of the information processing device 20 is similar to the configuration illustrated in FIG.
- the components of the information processing device 10b shown in FIG. 16 that perform the same processes as the components of the information processing device 10 shown in FIG. 9 are given the same reference numerals, and the following describes the processes that differ from the above embodiment and example.
- the map control unit 112b, acquisition unit 113b, association unit 114b, setting unit 115b, output unit 116b, and generation unit 401 shown in FIG. 16 are configured and executed by the processor 110b.
- the acquisition unit 113b shown in FIG. 16 acquires information on the possibility of activity in a specified space (also called "activity possibility information") from the moving body 20. For example, the acquisition unit 113b acquires the movement history of the moving body 20C or captured images captured by the moving body 20C. The fact that the moving body 20C was able to move indicates that activity is possible in that area.
- the associating unit 114b may associate activity availability information, which indicates whether or not the area is available for activity, with the space ID by analyzing the captured image captured by the mobile unit 20C.
- the associating unit 114b may also associate activity availability information, which indicates whether or not the area is available for activity, with the space ID of the area based on the movement history of the mobile unit 20C.
- the generating unit 401 selects a three-dimensional space based on the activity possibility information and generates first three-dimensional map data. For example, in the event of an earthquake or fire, the generating unit 401 selects space IDs of three-dimensional spaces in which activity is possible based on the activity possibility information indicating locations in a building where activity is possible, and combines them to generate first three-dimensional map data.
- the setting unit 115b may also set each processing target space based on the first three-dimensional map data. This makes it possible to set an appropriate processing target space within a range in which activity is possible.
- Example 3 when a fire breaks out in a building with multiple floors or during combat in an urban area, it is difficult to grasp the building structure in three dimensions at the scene, making it difficult to carry out firefighting and rescue operations.
- Example 3 by acquiring information (activity feasibility information) from an unmanned, remotely controlled robot or the like as to whether or not an activity is possible, and associating the activity feasibility information with a space ID, it is possible to easily generate three-dimensional map data (first three-dimensional map data) of a building structure in which activity is possible.
- information about the inside of a building that is difficult to understand from detailed building structure diagrams or floor plans can be linked to a spatial ID using driving information and sensor information from preceding robots, etc., and a simple building structure map can be generated in real time for areas where activity is possible, making it possible to visualize areas where activity can be done safely.
- the above example shows a moving object 20C that travels on the ground, but it can also be applied to an air vehicle 20B that flies in the sky, such as a drone. For example, if the topography changes significantly due to an earthquake, it is not appropriate to use conventional map data.
- the acquisition unit 113b acquires the movement history (flight track history) of the aircraft 20B, or sensor information (such as captured images) from the aircraft 20B.
- the association unit 114b analyzes this movement history or sensor information to identify information (activity feasibility information) indicating whether or not activity is possible in the area where the terrain has been deformed, and associates this activity feasibility information with the spatial ID of that terrain.
- the generating unit 401 selects a three-dimensional space based on the activity possibility information and generates the first three-dimensional map data. For example, in the event of an earthquake or the like, the generating unit 401 selects space IDs of three-dimensional spaces in which activity is possible based on the activity possibility information indicating locations in which activity is possible in areas where the topography has changed, and combines them to generate the first three-dimensional map data.
- the information from the flying object 20B can be associated with the space ID to generate simple three-dimensional topographical map data.
- simple three-dimensional topographical map data can be generated in real time by associating activity possibility information based on reconnaissance information from the flying object 20B with the space ID, making it possible to visualize areas where activities can be carried out safely.
- the acquisition unit 113b may acquire a movement history of location information (such as GPS location information) from the smartphone or the like, and the association unit 114b may determine whether or not activity is possible based on this movement history.
- Example 3 Furthermore, there is an issue with the map generation in Example 3 in that there is no electronic map data that allows logistics companies and the like to arbitrarily rewrite information (such as residents) that they hold. Therefore, in Example 3, a blank map is generated in which user-rewritable information is associated with a spatial ID, and is provided to users who have a need for it.
- the associating unit 114b associates arbitrarily rewritable information with the space ID.
- a logistics company can write address information and the like into this information.
- the generating unit 401 generates second 3D map data that includes rewritable information.
- the second 3D map data corresponds to a blank map.
- the output unit 116b outputs the second three-dimensional map data to a processing device used by the organization that manages the mobile object 20. This makes it possible to provide three-dimensional map data corresponding to a blank map to a third party.
- the organization that manages the mobile object 20, which corresponds to a third party, can generate user-friendly three-dimensional map data by writing information of their own use for various purposes to the arbitrarily rewritable information associated with the spatial ID included in the acquired three-dimensional map data.
- logistics companies will be able to hold 3D map data that can be freely rewritten, and can combine map data from different layers as they wish. This will enable open/closed management of data, such as whether it is shared or not, for each layer, which will lead to expanded data distribution.
- Fig. 17 is a diagram illustrating an example of data related to a space ID in Example 3.
- spatial position information, activity possibility information, optional information 1, and the like are associated with a space ID. Note that it is sufficient that at least one of the activity possibility information and optional information is associated with a space ID.
- the activity availability information is information identified from the travel history or sensor information of the mobile body 20, and indicates whether or not the mobile body 20 is capable of activity. For example, when the activity availability information is "1", it indicates that the mobile body 20 is capable of activity, and when the activity availability information is "0", it indicates that the mobile body 20 is not capable of activity.
- Optional information 1 is information that can be rewritten by the user. For example, address information or representative coordinates are written.
- multiple pieces of optional information may be associated with each other, such as optional information 1 and optional information 2. This allows the administrator of the 3D map data to decide whether or not to share each piece of optional information.
- Fig. 18 is a flowchart illustrating an example of a process of the information processing device 10b according to the embodiment 3.
- three-dimensional map data is newly generated from a three-dimensional space selected based on information related to activity possibility.
- step S302 the acquisition unit 113b acquires information on the possibility of activity (activity feasibility information) including travel history or sensor information from the moving body 20 (aircraft body 20B or moving body 20C).
- step S304 the association unit 114b associates the acquired activity availability information with the space ID of the corresponding three-dimensional space.
- step S306 the generation unit 401 identifies a three-dimensional space in which activity is possible based on the activity possibility information and the space ID, and generates three-dimensional map data (first three-dimensional map data).
- the three-dimensional map data is three-dimensional map data that includes a space ID associated with basic information such as address information and representative point coordinates.
- step S308 the output unit 116b outputs the generated three-dimensional map data to an external device.
- the three-dimensional map data showing the area in which activities can be carried out is output to, for example, the terminal of a user who is carrying out rescue activities.
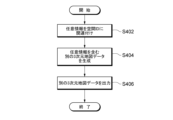
- FIG. 19 is a flowchart showing another example of the process of the information processing device 10b according to the third embodiment.
- new three-dimensional map data is generated in which arbitrarily rewritable information is associated with a spatial ID.
- step S402 the association unit 114b associates arbitrarily rewritable information (arbitrary information) with the space ID.
- step S404 the generation unit 401 generates three-dimensional map data (second three-dimensional map data) corresponding to the blank map, including a spatial ID associated with the arbitrary information.
- step S406 the output unit 116b outputs the generated 3D map data to an external device.
- the 3D map data including the spatial ID associated with the arbitrary information is output to, for example, a processing device of a distributor that wishes to write address information, etc.
- new 3D map data can be generated, and by associating arbitrarily rewritable information with a space ID, 3D map data corresponding to a blank map can be generated, thereby providing new services related to space IDs.
- Example 4 shows a specific example of indoor route control using indoor structural information and a space ID.
- three-dimensional map data is used for route control when a moving object 20 or a pedestrian is indoors.
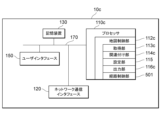
- ⁇ Configuration> 20 is a diagram illustrating an example of the configuration of an information processing device 10c according to the fourth embodiment.
- the configuration of the information processing device 20 is similar to the configuration illustrated in FIG.
- the components of the information processing device 10c shown in FIG. 20 that perform the same processes as the components of the information processing device 10 shown in FIG. 9 are given the same reference numerals, and the following describes the processes that differ from the above embodiment and example.
- the map control unit 112c, acquisition unit 113c, association unit 114c, output unit 116c, and route control unit 501 shown in FIG. 20 are configured and executed by the processor 110c.
- the acquisition unit 113c shown in FIG. 20 acquires structural information about a building or underground space (such as an underground mall) when the building or underground space exists in the three-dimensional space.
- the acquisition unit 113c acquires structural information including the layout and floor information of the building or underground space from a management company of the building or underground space.
- the associating unit 114c associates structural information of the building or underground space with the space ID of the three-dimensional space. For example, the associating unit 114c associates the layout and floor information of the building or underground space with the space ID of the three-dimensional space related to the building or underground space.
- the route control unit 501 selects each processing target space in the building or underground space from the starting point to the destination based on the structural information of the building or underground space, and sets a route by combining each space ID of each selected processing target space.
- the output unit 116c outputs route information including the space ID of the processing target space combined by the route control unit 501.
- the indoor route information is output to a processing device used by, for example, a moving body 20 or a pedestrian. This allows, for example, a moving body 20 or a pedestrian moving indoors or in an underground mall to move based on the set safe route information.
- the mobile body 20 can also display the selected route, corners, remaining distance, etc. on a display unit installed thereon. It can also be used to display emergency evacuation routes on digital signage in buildings or underground malls. It also becomes possible to guide pedestrians moving within an underground mall or building on the route to their destination.
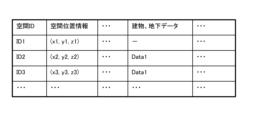
- Fig. 21 is a diagram illustrating an example of data related to a space ID in Example 4.
- spatial position information, buildings, underground data, and the like are associated with the space ID.
- the building and underground data includes structural information relating to the building or underground space.
- the structural information includes layout information and floor information of the building or underground.
- the structural information may be divided into spaces corresponding to the three-dimensional space of the associated space ID, and each structural information corresponding to each space ID may be associated.
- position information corresponding to the spatial position information of each space ID may be associated with the structural information.
- Fig. 22 is a diagram showing an example of each three-dimensional space of a building or an underground space in Example 4.
- an underground mall AR1 exists beneath the ground surface GR
- a three-dimensional space AR2 exists within a building.
- the underground mall AR1 is divided into three-dimensional spaces of a predetermined size, and each three-dimensional space is assigned a space ID.
- Each space ID is associated with structural information that indicates the layout of the underground mall.
- the space AR2 within the building is divided into three-dimensional spaces of a predetermined size, and each three-dimensional space is assigned a space ID.
- Each space ID is associated with structural information that indicates the building layout and floor structure.
- Fig. 23 is a flowchart illustrating an example of a process of the information processing device 10c according to the embodiment 4.
- the example illustrated in Fig. 23 illustrates a process of setting a route for appropriately controlling indoor movement.
- step S502 the association unit 114c associates the structural information of the building or underground space with the space ID.
- step S504 the acquisition unit 113c acquires departure point information and destination information from the processing device used by the moving body 20 or the pedestrian.
- step S506 the route control unit 501 selects a space ID of the processing target space from the starting point to the destination based on the structural information of the building or underground space.
- the processing target space may be the smallest unit of three-dimensional space.
- step S508 the output unit 116c combines the spatial IDs of the route set by the route control unit 501, and outputs route information in which the spatial IDs from the departure point to the destination are linked in order, for example.
- Output destinations include, for example, the mobile object 20 and processing devices used by pedestrians.
- Example 5 shows a specific example of displaying or expressing an obstacle or a moving object by using a space ID associated with information about the obstacle or the moving object.
- a space ID is specified and an obstacle or a moving object is expressed by using a three-dimensional space.
- ⁇ Configuration> 24 is a diagram illustrating an example of the configuration of an information processing device 10d according to the fifth embodiment.
- the configuration of the information processing device 20 is similar to the configuration illustrated in FIG.
- the components of the information processing device 10d shown in FIG. 24 that perform the same processes as the components of the information processing device 10 shown in FIG. 9 are given the same reference numerals, and the following describes the processes that differ from the above embodiment and example.
- the map control unit 112d, acquisition unit 113d, association unit 114d, and output unit 116d shown in FIG. 24 are configured and executed by the processor 110d.
- the acquisition unit 113d shown in FIG. 24 acquires information about moving objects or information about ground obstacles.
- Information about moving objects includes, for example, information indicating obstacles such as a passenger boarding bridge (PBB), the sea surface, or vehicles parked on the road, or clumps of living things such as schools of fish.
- Information about ground obstacles includes, for example, information indicating high-voltage pylons and power lines, or the height of lightning rods expected on buildings, or mountain surfaces, trees, or digital elevation models (DEM: Digital Elevation Models).
- the associating unit 114d associates information about the moving object with a space ID of a three-dimensional space including the current position of the moving object.
- the associating unit 114d also associates information about the ground obstacle with a space ID of a three-dimensional space including the ground obstacle.
- the output unit 116d outputs the space ID associated with information about a moving object or information about a ground obstacle in a manner that makes it distinguishable from other space IDs. This makes it possible to display or express a three-dimensional space in which a moving object or a ground obstacle exists when displaying a three-dimensional space based on the space ID, for example, by making the space ID associated with information about a moving object or information about a ground obstacle distinguishable from other space IDs.
- ground obstacles such as high-voltage pylons and power lines, and the height of lightning rods expected on buildings is associated with the space ID of the three-dimensional space in which the ground obstacle exists. This process makes it possible to display and express the ground obstacles using the three-dimensional space in which they exist, without having to take the trouble of measuring the ground obstacles to create a model.
- information about moving objects that do not exist in a fixed manner and that change position, which is difficult to represent on a map is associated with the space ID of the three-dimensional space in which the moving object exists.
- This process changes the correspondence between the information about the moving object and the space ID, making it possible to represent a three-dimensional space in which moving objects exist dynamically.
- the acquisition unit 113d acquires location information from moving objects with GPS functionality, acquires school of fish information from ships equipped with fish finders, and acquires location information of vehicles that have reported the presence of obstacles. This allows the association unit 114d to associate the location information of moving objects acquired by the acquisition unit 113d with a space ID.
- Fig. 25 is a diagram illustrating an example of data related to a space ID in Example 5.
- spatial position information, moving object information, ground obstacle information, and the like are associated with the space ID. Note that at least one of the moving object information and the ground obstacle information may be associated.
- the moving object information includes, for example, information indicating obstacles such as PBBs, the sea surface, and parked vehicles on the road, or clumps of living organisms such as schools of fish, and includes information that can identify each type of moving object so that the type of moving object can be identified.
- Ground obstacle information includes, for example, information indicating high-voltage towers and power lines, the expected height of lightning rods on buildings, etc., and includes information that can identify each type of ground obstacle so that the type of ground obstacle can be identified.
- Fig. 26 is a flowchart illustrating an example of a process performed by the information processing device 10d according to the embodiment 5.
- the example illustrated in Fig. 26 illustrates a process for identifying a moving object or a ground obstacle by a space ID and making it possible to display or represent the moving object or obstacle in a three-dimensional space.
- step S602 the acquisition unit 113d acquires information about moving objects (moving object information) or information about ground obstacles (ground obstacle information).
- step S604 the association unit 114d associates the moving object information or ground obstacle information with the space ID.
- step S606 the output unit 116d outputs the space ID associated with the moving object information or ground obstacle information in a manner that makes it distinguishable from other space IDs.
- the output destination is, for example, the moving object 20.
- this information can be displayed or expressed as a three-dimensional spatial ID, thereby providing new services related to spatial IDs.
- Example 6 shows a specific example of processing information associated with a space ID in a three-dimensional space or in units of space IDs. For example, in Example 6, arithmetic operations are performed or a three-dimensional distribution display is performed in units of space IDs using information associated with space IDs.
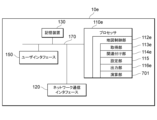
- ⁇ Configuration> 27 is a diagram showing an example of the configuration of an information processing device 10e in Example 6.
- the configuration of the information processing device 20 is similar to the configuration shown in FIG.
- the components of the information processing device 10e shown in FIG. 27 that perform the same processes as the components of the information processing device 10 shown in FIG. 9 are given the same reference numerals, and the following describes the processes that differ from the above embodiment and example.
- the map control unit 112e, acquisition unit 113e, output unit 116e, and calculation unit 701 shown in FIG. 27 are configured and executed by the processor 110e.
- the calculation unit 701 shown in FIG. 27 performs calculation processing on information associated with a space ID in units of the space ID of the three-dimensional space.
- the calculation unit 701 may also perform calculation processing in units of the space ID of the space to be processed. For example, since each piece of position information within a three-dimensional space or the space to be processed may have different granularity, the calculation unit 701 performs calculation processing on the position information associated with the space ID, and is not affected by information of different granularity within the space. This can be achieved by keeping the information associated with the space ID in a unified format.
- the processing target sections may be different.
- the size of each voxel is different, and therefore the granularity of the information is also different. Therefore, the calculation unit 701 performs calculations for a representative space ID of the processing target space using a representative value of information associated with each space ID of a plurality of three-dimensional spaces in the processing target space.
- the representative value of information associated with each space ID of the three-dimensional space includes, for example, a median, an average value, or a total value.
- information on the number of passengers in MaaS (Mobility as a Service) and information on the storage of items in a specific indoor space may be associated with the space ID.
- the calculation unit 701 may analyze past changes and future predictions for the number of passengers and the storage information of items for each space ID. Furthermore, the calculation unit 701 may perform data analysis using a machine learning model.
- the machine learning model may be selected from a group including neural network models such as a convolutional neural network model and a recurrent neural network. Furthermore, there is no limit to the number of layers of the machine learning model, no limit to the type of activation function, and no limit to the type of model, and any known or commonly used method may be adopted as appropriate. Note that the use of the machine learning model is not limited to the processing by the calculation unit 701, and the machine learning model may be used if it is available for processing in the disclosed technology.
- the output unit 116d may output the spatial ID rather than outputting information associated with the spatial ID. This can reduce communication capacity and avoid putting a strain on the communication bandwidth.
- the calculation unit 701 also determines the distribution of each three-dimensional space or each processing target space based on the number of objects contained in the three-dimensional space. For example, if the acquisition unit 113e acquires the distribution of people in a specified area, the calculation unit 701 overlays the three-dimensional map data corresponding to the specified area with the distribution of people to determine the distribution of people in each three-dimensional space. For example, by overlaying the specified area on the three-dimensional map data, the calculation unit 701 can perform object recognition for each three-dimensional space and identify the number of people in each three-dimensional space.
- the output unit 116e outputs three-dimensional map data including each three-dimensional space that represents the distribution of people. For example, it is advisable to divide the distribution of people into multiple stages and use colors, patterns, etc. to distinguish differences in the number of people. This makes it possible to visualize the number of people, etc. in three dimensions.
- the output unit 116e outputs distribution information associated with the space ID of each three-dimensional space to, for example, an external device that has requested the distribution display.
- the distribution information includes information indicating colors, patterns, etc. for distinguishing differences in the number of people.
- FIG. 28 is a diagram showing an example of the distribution of people in a three-dimensional space in Example 6.
- differences in the number of people are expressed by patterns. The darker the pattern in the three-dimensional space, the greater the number of people. This allows the user to grasp the distribution in three dimensions by looking at the three-dimensional map data that includes the three-dimensional space with the distribution pattern added.
- the distribution display can be of animals, plants, etc., in addition to people.
- the distribution can also be above ground, underground, or by floor.
- Fig. 29 is a flowchart illustrating an example of the process of the information processing device 10e according to the embodiment 6.
- the example illustrated in Fig. 29 illustrates a process of setting a route for appropriately controlling indoor movement.
- step S702 the calculation unit 701 acquires the space ID of the processing target space.
- the processing target space may be a three-dimensional space of the smallest unit, or may be a processing target space of a different size.
- step S704 the calculation unit 701 obtains information associated with the obtained space ID.
- step S706 the calculation unit 701 performs calculations on the acquired information on a space ID basis. This allows the calculations to be performed using representative values associated with the space ID, absorbing differences in the amount of information and granularity within the space to be processed.
- the sixth embodiment by performing calculation processing on information on a space ID basis, it is possible to provide new use cases related to space IDs, and by associating distribution information with space IDs, it is possible to provide new services related to space IDs, such as three-dimensional distribution display.
- the present invention may transfer some of the processes executed by the information processing device 10 to another information processing device, or may appropriately integrate multiple information processing devices.
- the units in the height direction may be changed based on the altitude. For example, the higher one goes into the sky, the larger the units in height for dividing the three-dimensional space may become. This is because it is considered that the higher one goes into the sky, the less need there is for subdivision. Furthermore, not only does the unit in the height direction of the three-dimensional space change depending on the altitude, but the horizontal size may also be changed.
- At least the horizontal unit of a specified three-dimensional space may be changed based on the feature data or area information included in the three-dimensional map data.
- at least the horizontal unit of the three-dimensional space may be changed depending on whether the area to be divided is a mountainous area or an urban area. More specifically, if the area to be divided is a mountainous area, the horizontal unit of the three-dimensional space may be larger than the unit of an urban area. Furthermore, if the area to be divided is a mountainous area, the height unit of the three-dimensional space may be larger than the unit of an urban area.
- the data structure of the map data including the above-mentioned spatial IDs and information associated with the spatial IDs makes it possible for the processing device to process the spatial IDs or the information associated with the spatial IDs one after another, thereby achieving the above-mentioned effects.
- the processing device of a vehicle or an aircraft may control the direction of movement or set a route while referring to the spatial IDs or the information associated with the spatial IDs.
- Information processing system 10 Information processing device 20 Mobile object 20 Information processing device 30 Information processing device 110 Processor 112 Map control unit 113 Acquisition unit 114 Association unit 115 Setting unit 116 Output unit 117 Association unit 120 Network communication interface 130 Storage device 150 User interface 212 Map control unit 301 Aircraft control unit 310 Processor 312 Control unit 313 Communication control unit 314 Movement control unit 315 Display control unit 316 Operation control unit 320 Network communication interface 330 Storage device 350 User interface 401 Generation unit 501 Route control unit 701 Calculation unit
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Educational Technology (AREA)
- Educational Administration (AREA)
- Business, Economics & Management (AREA)
- Mathematical Physics (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- Remote Sensing (AREA)
- Computer Graphics (AREA)
- Traffic Control Systems (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025537351A JPWO2025028361A1 (https=) | 2023-08-01 | 2024-07-24 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023125742 | 2023-08-01 | ||
| JP2023-125742 | 2023-08-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025028361A1 true WO2025028361A1 (ja) | 2025-02-06 |
Family
ID=94394580
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/026445 Pending WO2025028361A1 (ja) | 2023-08-01 | 2024-07-24 | 情報処理方法、プログラム、及び情報処理装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025028361A1 (https=) |
| WO (1) | WO2025028361A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006293876A (ja) * | 2005-04-14 | 2006-10-26 | Hitachi Ltd | 交通情報収集装置及び車載装置 |
| JP2019168437A (ja) * | 2018-03-26 | 2019-10-03 | パイオニア株式会社 | データ構造、情報送信装置、制御方法、プログラム及び記憶媒体 |
| JP2023048587A (ja) * | 2021-09-28 | 2023-04-07 | ダイナミックマップ基盤株式会社 | 情報処理方法、プログラム、及び情報処理装置 |
| WO2023058079A1 (ja) * | 2021-10-04 | 2023-04-13 | 三菱電機株式会社 | 経路生成装置及び方法 |
| JP2023075496A (ja) * | 2021-11-19 | 2023-05-31 | 株式会社ブルーストーンリンクアンドサークル | フィールド業務自動化支援システム及びフィールド業務自動化支援プログラム |
-
2024
- 2024-07-24 JP JP2025537351A patent/JPWO2025028361A1/ja active Pending
- 2024-07-24 WO PCT/JP2024/026445 patent/WO2025028361A1/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006293876A (ja) * | 2005-04-14 | 2006-10-26 | Hitachi Ltd | 交通情報収集装置及び車載装置 |
| JP2019168437A (ja) * | 2018-03-26 | 2019-10-03 | パイオニア株式会社 | データ構造、情報送信装置、制御方法、プログラム及び記憶媒体 |
| JP2023048587A (ja) * | 2021-09-28 | 2023-04-07 | ダイナミックマップ基盤株式会社 | 情報処理方法、プログラム、及び情報処理装置 |
| WO2023058079A1 (ja) * | 2021-10-04 | 2023-04-13 | 三菱電機株式会社 | 経路生成装置及び方法 |
| JP2023075496A (ja) * | 2021-11-19 | 2023-05-31 | 株式会社ブルーストーンリンクアンドサークル | フィールド業務自動化支援システム及びフィールド業務自動化支援プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025028361A1 (https=) | 2025-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Andreou et al. | UAV trajectory optimisation in smart cities using modified A* algorithm combined with haversine and vincenty formulas | |
| JP6772100B2 (ja) | ドローン用動態管理装置、ドローン用動態管理方法及びドローン用動態管理プログラム | |
| JP6866203B2 (ja) | ドローンナビゲーション装置、ドローンナビゲーション方法、ドローンナビゲーションプログラム、探索用データ形成装置及び探索用データ形成プログラム | |
| US20210125507A1 (en) | Method and system for unmanned aerial vehicle flight highway | |
| CN110118564B (zh) | 一种高精度地图的数据管理系统、管理方法、终端和存储介质 | |
| JP6947626B2 (ja) | Uav航行用ネットワークデータ生成装置、uav航行用ネットワークデータ生成方法、uav航行用経路作成装置 | |
| JP7083010B2 (ja) | 運航計画作成装置、運航計画作成方法および運航計画作成プログラム | |
| JP2018165931A (ja) | ドローン用管制装置、ドローン用管制方法及びドローン用管制プログラム | |
| CN114867988A (zh) | 包括用于在gnss故障期间为飞行器确定路线的数据的地图 | |
| CN114003997B (zh) | 一种BIM与Vissim融合的施工交通组织三维仿真模拟方法 | |
| JP6846253B2 (ja) | ドローン用緊急事態対応指示装置、ドローン用緊急事態対応指示方法及びドローン用緊急事態対応指示プログラム | |
| US20210325907A1 (en) | Method and apparatus for generating an aerial navigation route based on a payload survivability estimate | |
| US12234013B2 (en) | Method and apparatus for determining navigation routes based on weather manipulation data | |
| CN114995519B (zh) | 一种基于多障碍场景的无人机ai降落方法及系统 | |
| KR20190004983A (ko) | 무인비행체의 안전 운항을 위한 디지털 무빙 맵 서비스 제공 방법 및 장치 | |
| JP7808813B2 (ja) | 情報処理方法、プログラム、及び情報処理装置 | |
| Hutsul et al. | Recommendations for planning UAV flight missions for geodata collection | |
| US20220253803A1 (en) | Method, apparatus, and computer program product for vantage view assistance | |
| WO2025028361A1 (ja) | 情報処理方法、プログラム、及び情報処理装置 | |
| JP2021043945A (ja) | コンピュータシステムおよびプログラム | |
| JP7679577B2 (ja) | 情報処理装置、プログラム、飛行経路探索方法 | |
| Cherif | Lidar from the Skies: A UAV-Based Approach for Efficient Object Detection and Tracking | |
| Kamga et al. | Exploring Applications for Unmanned Aerial Systems (UAS) and Unmanned Ground Systems (UGS) in Enhanced Incident Management, Bridge Inspection, and Other Transportation Related Operations | |
| CA3059698A1 (en) | Method and system for unmanned aerial vehicle flight highway | |
| JP7138290B1 (ja) | 情報処理方法、プログラム及び情報処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24849016 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025537351 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |