WO2025022612A1 - 評価システムおよび評価方法 - Google Patents
評価システムおよび評価方法 Download PDFInfo
- Publication number
- WO2025022612A1 WO2025022612A1 PCT/JP2023/027409 JP2023027409W WO2025022612A1 WO 2025022612 A1 WO2025022612 A1 WO 2025022612A1 JP 2023027409 W JP2023027409 W JP 2023027409W WO 2025022612 A1 WO2025022612 A1 WO 2025022612A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- data
- action
- motion
- evaluation
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0639—Performance analysis of employees; Performance analysis of enterprise or organisation operations
Definitions
- This disclosure relates to an evaluation system and an evaluation method.
- an evaluation system includes a sensor attached to the head of a worker for detecting a motion of the head, a sensor data creation unit that acquires a detection value output from the sensor during a period in which the worker operates a device and creates sensor data in which the acquired detection value is associated with an elapsed time from a start time of a target period to be evaluated, an action data creation unit that uses the sensor data to extract the motion and creates action data in which the extracted motion is associated with the elapsed time, and an evaluation unit that uses the action data to evaluate the proficiency of the worker.
- the proficiency can be evaluated with high accuracy by using the data of the head motion of the worker for evaluation.
- the evaluation unit may evaluate the proficiency by comparing the motion data with predetermined reference data in which reference motions serving as a standard for the motion during the target period are arranged in chronological order. According to this aspect, the proficiency can be evaluated by comparing the reference data with the motion data.
- the reference data includes a plurality of reference actions
- the action data includes a plurality of the actions
- each of the plurality of reference actions included in the reference data is assigned a predetermined action type
- the action data creation unit associates the action type with each of the plurality of actions included in the action data
- the evaluation unit performs at least one of a determination process of determining whether each of the plurality of reference actions included in the reference data can be associated with at least one of the plurality of actions included in the action data having the same action type as the plurality of actions included in the action data, a first assignment process of assigning a first action label to the reference action of the reference data determined not to be associated with the reference action determined not to be associated with the reference action in the determination process when it is determined that the action cannot be associated with the reference action in the determination process, and a second assignment process of assigning a second action label to the action of the plurality of actions of the action data that cannot be associated with any of the plurality of reference actions of the reference data in
- the proficiency level can be evaluated with high accuracy.
- An action to which the first action label is assigned indicates an action that was not performed by the worker, even though it was necessary.
- an action to which the second action label is assigned indicates an unnecessary action performed by the worker. Therefore, by evaluating the proficiency level using the assignment status of each of the first action label and the second action label, the evaluation can be performed with high accuracy.
- the reference data may be the operation data created using the sensor data acquired during a period in which the highly skilled worker is operating the device.
- the sensor data acquired during a period in which the highly skilled worker operates the device can be used as the reference data.
- data reflecting the actual situation can be used as the reference data.
- the motion data includes a plurality of the motions
- the evaluation unit performs at least one of a first time evaluation process of attaching a first time label to each of the motions included in the motion data when the motion time from the start of the motion to the end of the motion is longer than a predetermined reference motion time, and a second time evaluation process of attaching a second time label to the target motion when the motion interval between a target motion among the motions included in the motion data and the next motion of the target motion is longer than a predetermined reference motion interval, and may evaluate the proficiency using the attachment status of each of the first time label and the second time label. According to this embodiment, the proficiency can be evaluated with high accuracy.
- a motion to which the first time label is attached indicates that the motion itself takes a long time.
- a motion to which the second time label is attached indicates that it takes a long time to start the next motion after performing this motion. Therefore, by evaluating the proficiency level using at least one of the attachment status of the first action label and the attachment status of the second action label, the evaluation can be performed with high accuracy.
- the device includes a reception unit that receives an operation from the worker, and the evaluation system further includes an operation information acquisition unit that acquires operation information data that associates the operation information, which is information on the operation received by the reception unit, with the elapsed time during the target period, and the operation information data includes a plurality of pieces of the operation information, and the evaluation unit may use the operation information data to divide the motion data into a plurality of sections using each piece of the operation information as a separator, and set each of the plurality of sections as a target section to perform evaluation. According to this embodiment, evaluation can be performed for each section, and the accuracy of the evaluation can be further improved.
- the evaluation system of the above embodiment may further include at least one of a sound conversion unit that converts sound data into sound and a display unit that displays information using display data, a determination unit that extracts the motion using the sensor data and determines a next reference motion that is the reference motion to be performed next by the worker by comparing the extracted motion with predetermined reference data in which reference motions that are standards for the motions in the target period are arranged in chronological order, and an output unit that performs at least one of a first output process that outputs the sound data that instructs the next reference motion determined by the determination unit to the sound conversion unit and a second output process that outputs the display data including the information that instructs the next reference motion to the display unit.
- a sound conversion unit that converts sound data into sound and a display unit that displays information using display data
- a determination unit that extracts the motion using the sensor data and determines a next reference motion that is the reference motion to be performed next by the worker by comparing the extracted motion with predetermined reference data in which reference motions that are standards for the motions
- the evaluation system of the above aspect may further include an ear-worn device to be worn on the ear of the worker, the ear-worn device having a data acquisition unit that acquires sound data and a sound conversion unit that converts the acquired sound data into sound and emits the sound toward the ear, and the sensor may be built into the ear-worn device.
- the sensor built into the ear-worn device can be used for evaluation.
- the evaluation system of the above embodiment further includes a microphone for acquiring the voice uttered by the worker as voice data, a voice data creation unit for acquiring the voice data acquired by the microphone during the target period and creating voice time series data in which the acquired voice data is associated with the elapsed time, a call data creation unit for extracting the calls of the worker using the voice time series data and creating call data in which the extracted calls are associated with the elapsed time, and an integrated data creation unit for creating integrated data in which the actions included in the action data and the calls included in the call data are arranged in chronological order using the elapsed time associated with each of them, wherein the reference data further includes a reference call that is a reference for the calls during the target period, the reference actions and the reference calls are arranged in chronological order, and the evaluation unit evaluates the proficiency by comparing the integrated data with the reference data.
- the voice uttered by the worker can also be added to the evaluation target, so that the evaluation can be performed in more detail.
- the present disclosure can be realized in various forms, and in addition to the above-mentioned evaluation system, it can be realized in the form of, for example, an evaluation method, an evaluation program, etc.
- FIG. 1 is an explanatory diagram showing a schematic configuration of an evaluation system.
- FIG. 1 is a block diagram showing a configuration of an evaluation system.
- FIG. 4 is a diagram illustrating detection by a motion sensor.
- 11 is a flowchart showing the procedure of a press-fitting process.
- FIG. 13 is a diagram for explaining the position and orientation of a worker at the start of a target period.
- 4A and 4B are diagrams for explaining detection values and operation data of a motion sensor. 13 is a diagram comparing the detection values of the motion sensors of a beginner and an expert.
- 11 is a flowchart showing the procedure of an evaluation process performed by an evaluation unit.
- FIG. 4 is a diagram for explaining the processing contents of evaluation processing.
- 11 is a flowchart showing the procedure of a training process.
- FIG. 11 is a block diagram of an information processing apparatus according to a second embodiment.
- FIG. 11 is a diagram for explaining the relationship between a target period and a section according to the second embodiment.
- 13 is a flowchart showing the procedure of a multi-section evaluation process according to the second embodiment.
- FIG. 13 is a block diagram of an information processing apparatus according to a third embodiment.
- FIG. 1 is an explanatory diagram showing a schematic configuration of an evaluation system 1.
- the evaluation system 1 shown in Fig. 1 is a system for evaluating the proficiency of an operator OP who operates a press-fitting device 60 as an apparatus.
- Fig. 1 shows an up-down direction, a front-rear direction, and a left-right direction that are mutually orthogonal. Each direction is a direction based on the operator OP.
- the evaluation system 1 includes an information processing device 10, an ear-worn device 80, and a mobile terminal device 90.
- the information processing device 10 is disposed near the press-fitting device 60.
- the ear-worn device 80 is worn on the head of the worker OP.
- the ear-worn device 80 has a pair of housings 80a that are worn on each of the worker OP's ears.
- the ear-worn device 80 is an earphone type, and each of the pair of housings 80a has a shape that can be inserted into an ear canal.
- the ear-worn device 80 is used to detect the movement of the head of the worker OP.
- the shape of the ear-worn device 80 is not limited to an earphone type, and may be a headphone type.
- the mobile terminal device 90 is carried by the worker OP. Since the worker OP works near the press-fitting device 60, the mobile terminal device 90 is not limited to being carried by the worker OP, but may be placed near the press-fitting device 60. The mobile terminal device 90 mediates communication between the ear-worn device 80 and the information processing device 10.
- the press-fitting device 60 is a device that performs press-fitting processing on the workpiece W.
- the workpiece W includes a press-fitted part Wa and a press-fitted part Wb. In the press-fitting processing, the press-fitted part Wb is pressed into the press-fitted part Wa.
- the press-fitting device 60 has a receiving section 61, a fixed section 62, and a movable section 63.
- the movable section 63 is disposed above the fixed section 62.
- the movable section 63 is configured to be movable in the up-down direction. Specifically, the movable section 63 approaches the fixed section 62 by descending, and moves away from the fixed section 62 by ascending.
- the movable section 63 moves by the driving force of a motor (not shown) provided in the press-fitting device 60.
- the movable section 63 descends from above the workpiece W disposed on the fixed section 62 and presses the workpiece W, thereby performing the press-fitting processing.
- the receiving section 61 has a touch panel 61a and an operation button 61b.
- the touch panel 61a has a display function for displaying information and a reception function for receiving operations.
- the operation button 61b is, for example, a push button such as a power button.
- FIG. 2 is a block diagram showing the configuration of the evaluation system 1.
- the information processing device 10 is configured as a computer having a processor 20 and a storage unit 30.
- the processor 20 performs various processes by executing programs stored in the storage unit 30.
- the processor 20 has, as functional units, a sensor data creation unit 21, a motion data creation unit 22, an evaluation unit 23, a determination unit 24, and an output unit 25.
- Each functional unit is realized by executing a program stored in the storage unit 30.
- the storage unit 30 is realized by a memory such as a RAM or ROM.
- the storage unit 30 stores sensor data 31, motion data 32, reference data 33, an evaluation program 34, and a training program 35.
- the information processing device 10 further includes a communication unit 40.
- the communication unit 40 communicates with external devices such as a mobile terminal device 90 via a network such as a LAN (Local Area Network).
- LAN Local Area Network
- the ear-worn device 80 has a pair of housings 80a shown in FIG. 1 each built-in with a motion sensor 81 as a sensor shown in FIG. 2, a sound conversion unit 82, a microphone 83, and a communication unit 84. Note that the motion sensor 81 and the microphone 83 may each be built-in to both of the pair of housings 80a, or may each be built-in to one of the housings 80a.
- the motion sensor 81 detects the movement of the head of the worker OP.
- the motion sensor 81 is a general-purpose so-called six-axis motion sensor.
- the motion sensor 81 includes a three-axis acceleration sensor and a three-axis angular velocity sensor.
- the motion sensor 81 detects the acceleration [m/ s2 ] of each of the three axes and the angular velocity [deg/s] of each of the three axes.
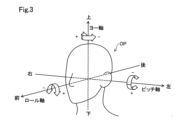
- FIG. 3 is a diagram for explaining detection by the motion sensor 81.
- the three axes along which the motion sensor 81 detects acceleration and angular velocity are specifically the yaw axis, roll axis, and pitch axis, which are mutually perpendicular.
- the yaw axis is an axis parallel to the up-down direction based on the worker OP.
- the roll axis is an axis parallel to the front-rear direction based on the worker OP.
- the pitch axis is an axis parallel to the left-right direction based on the worker OP.
- the motion sensor 81 outputs a positive value for the acceleration of the yaw axis when the worker OP moves his head up, and outputs a negative value when the worker OP moves his head down.
- the motion sensor 81 outputs a positive value for the acceleration of the roll axis when the worker OP moves his head forward, and outputs a negative value when the worker OP moves his head back.
- the motion sensor 81 outputs a positive value for the acceleration of the pitch axis when the worker OP moves his face to the left, and outputs a negative value when the worker OP moves his head to the right.
- the motion sensor 81 outputs a positive value for the angular velocity of the yaw axis when the worker OP turns his face to the right, and outputs a negative value when the worker OP turns his face to the left.
- the motion sensor 81 outputs a positive value for the angular velocity of the roll axis when the worker OP tilts his head to the left, and outputs a negative value when the worker OP tilts his head to the right.
- the motion sensor 81 outputs a positive value for the angular velocity of the pitch axis when the worker OP turns his face down, and outputs a negative value when the worker OP turns his face up.
- the sound conversion unit 82 shown in FIG. 2 converts sound data, which is an electrical signal, into sound and emits it toward the ears of the worker OP.
- the microphone 83 converts sound into sound data, which is an electrical signal. In detail, the microphone 83 converts the voice emitted by the worker OP into voice data and acquires it.
- the microphone 83 outputs the acquired voice data to the communication unit 84.
- the communication unit 84 performs short-distance communication with the mobile terminal device 90. In this embodiment, the communication unit 84 and the mobile terminal device 90 communicate in accordance with Bluetooth (registered trademark).
- the communication unit 84 has a data acquisition unit 85 and a data output unit 86 as functional units.
- the data acquisition unit 85 receives sound data transmitted from the outside and outputs the received sound data to the sound conversion unit 82.
- the data output unit 86 transmits the sound data output from the microphone 83 to the outside.
- the communication unit 84 is realized by an electronic circuit or the like.
- the mobile terminal device 90 is a smartphone.
- the mobile terminal device 90 has a communication unit 91.
- the communication unit 91 of the mobile terminal device 90 performs short-range communication with the communication unit 84 of the ear-worn device 80, and also performs communication with the communication unit 40 via a network.
- communication between the ear-worn device 80 and the mobile terminal device 90 is not limited to wireless communication, and may be performed by wired communication.
- the communication unit 40 of the information processing device 10 may have a function of performing short-range communication, and the communication unit 40 may perform short-range communication with the communication unit 84 of the ear-worn device 80 without the mobile terminal device 90.
- the communication unit 84 of the ear-worn device 80 may have a function of communicating via a network, and the communication unit 84 may communicate with the communication unit 40 via a network without the mobile terminal device 90.
- the press-fitting device 60 has a processor 65, a storage unit 66, and a communication unit 68.
- the storage unit 66 has a program for creating operation information data 67 stored in advance.
- the processor 65 creates the operation information data 67 by executing the program stored in the storage unit 66.
- the operation information data 67 is information in which operation information, which is information on an operation accepted by the acceptance unit 61, is associated with the time of acceptance. In this specification, "time” refers to a time including a date.
- the processor 65 creates the operation information data 67 by associating the information on the accepted operation with the time of acceptance. Then, the processor 65 stores the created operation information data 67 in the storage unit 66.
- the operations accepted by the acceptance unit 61 specifically include an operation of changing the state of a descent button for lowering the movable part 63 from an off state to an on state, and an operation of operating the touch panel 61a to set the descent speed of the movable part 63.
- the down button is included in the operation buttons 61b.
- the communication unit 64 communicates with the information processing device 10 via a network.
- the evaluation system 1 has an evaluation function and a training function.
- the evaluation function is a function for evaluating the proficiency of an operator OP after the operator OP performs work using the press-in device 60.
- the training function is a function for supporting the operator OP in training for work using the press-in device 60.
- FIG. 4 is a flowchart showing the procedure of the press-in process.
- the worker OP stands at a position where the state of the movable part 63 and the workpiece W can be visually confirmed, and performs the work by operating the reception unit 61 without moving.
- the movable part 63 is operated by the worker OP to lower the speed and descend to a position immediately before contacting the workpiece W, and then to increase the speed and further descend for press-in.
- the press-in device 60 is preset to a state in which the movable part 63 is located at a position above and away from the fixed part 62.
- the worker OP places the workpiece W at a predefined reference position of the fixed part 62.
- the worker OP checks by looking at the touch panel 61a whether the descent speed of the movable part 63 is set to a predefined first speed.
- the worker OP checks by looking at the workpiece W whether it is located at the reference position.
- the worker OP sets the descent switch, which is one of the operation buttons 61b of the reception unit 61, to the on state, and causes the movable part 63 to descend at the first speed.
- step S18 the worker OP looks at the workpiece W and confirms that the movable part 63 has descended to the stop position.
- the stop position is a position just before the movable part 63 comes into contact with the workpiece W, where the distance between the movable part 63 and the workpiece W is about several centimeters.
- step S20 the worker OP operates the reception unit 61 to set the descent switch to the OFF state and change the speed of the movable part 63 to a second speed that is higher than the first speed.
- step S22 the worker OP sets the descent switch to the ON state to further lower the movable part 63 and press the press-in part Wb into the press-fit part Wa.
- the press-in device 60 is preset so that the application of pressure by the movable part 63 to the fixed part 62 and the workpiece W is stopped when a preset time has elapsed after the pressure received by the movable part 63 reaches a preset pressure. The press-in process is completed when the application of pressure by the movable part 63 is stopped.
- the sensor data creation unit 21 shown in FIG. 2 performs a sensor data creation process in which it acquires detection values output from the motion sensor 81 and creates sensor data 31 that associates the acquired detection values with the elapsed time from the start time of the target period.
- the target period is the period during which the worker OP performs the press-fitting process, during which the proficiency is to be evaluated.
- the detection values are, specifically, the angular velocities of the above three axes and the accelerations of the three axes.
- the sensor data creation unit 21 then stores the created sensor data 31 in the storage unit 30.
- the period from step S12 to step S16 is the target period.
- evaluation function: 5 is a diagram for explaining the position and orientation of the operator OP at the start of the target period.
- the operator OP performs step S10, and then stands in a reference position where the operator can operate the reception unit 61 while facing the front of the press-fitting device 60, as shown in FIG. 5.
- the values of the detection values of the motion sensor 81 are set to the reference value, i.e., zero.
- the administrator of the evaluation system 1 starts the evaluation program 34 on the information processing device 10.
- the evaluation program 34 displays a GUI (Graphical User Interface) for inputting the evaluation start time to be displayed on the display of the information processing device 10.
- the administrator inputs the disclosure time into the GUI for inputting the evaluation start time, and instructs the worker OP to start work.
- the evaluation program 34 stores the start time input into the GUI in the memory unit 30.
- the worker OP When instructed to start work, the worker OP performs steps S12 to S16.
- the administrator inputs the end time into a GUI for inputting the evaluation end time, which is displayed on the display of the information processing device 10 by the evaluation program 34.
- the evaluation program 34 stores the end time input into the GUI in the storage unit 30.
- the administrator selects the evaluation start button, which is a GUI displayed on the display of the information processing device 10 by the evaluation program 34.
- the evaluation program 34 requests the motion data creation unit 22 to create motion data 32.
- the motion data creation unit 22 When requested, the motion data creation unit 22 performs a motion data creation process in which it extracts motions using the sensor data 31 and creates motion data 32 that associates the extracted motions with elapsed time.
- FIG. 6 is a diagram explaining the detection values of the motion sensor 81 and the operation data 32. From the top to the bottom of FIG. 6, a graph showing the relationship between the yaw axis angle and elapsed time, a graph showing the relationship between the pitch axis angle and elapsed time, a graph showing the relationship between the yaw axis acceleration and elapsed time, and operation data 32 are shown, respectively.
- the horizontal axes of the graph showing the relationship between the yaw axis angle and time, the graph showing the relationship between the pitch axis angle and time, and the graph showing the relationship between the yaw axis acceleration and time are aligned so that the elapsed time starting from the evaluation start time is consistent with each other.
- the motion data creation unit 22 extracts motions using the sensor data 31.
- the head motions performed by the worker OP are two types of motions: a motion to look at the reception unit 61 and a motion to look at the workpiece W.
- the motion data creation unit 22 uses data on the angular velocity and angle of the yaw axis, and data on the angular velocity and angle of the pitch axis to extract motions.
- the motion data creation unit 22 obtains data on the yaw axis angle of the motion sensor 81 by converting the detected value of the angular velocity of the yaw axis into an angle.
- the motion data creation unit 22 obtains data on the pitch axis angle of the motion sensor 81 by converting the detected value of the angular velocity of the pitch axis into an angle.
- the motion data creation unit 22 extracts, from the data on the angular velocity of the yaw axis, the time when the absolute value of the angular velocity becomes greater than a predetermined first threshold value and the time when the absolute value of the angular velocity becomes smaller than a predetermined second threshold value.
- the first threshold value is a threshold value for extracting the time when the motion is started.
- the second threshold value is a threshold value for extracting the time when the motion is stopped.
- the first threshold value is a threshold value for extracting the start of the motion of turning the face.
- the second threshold value is a threshold value for extracting the end of the motion of turning the face.
- the first and second threshold values are values obtained by experiments, etc.
- the motion data creation unit 22 determines that the absolute value of the angular velocity of the yaw axis is greater than the first threshold value at times ts1 and ts2 in FIG. 6. The motion data creation unit 22 also determines that the absolute value of the angular velocity of the yaw axis is less than the second threshold value at times t1 and t2.
- the motion data creation unit 22 determines whether the object the worker OP is looking at is the touch panel 61a or the workpiece W at the time when the absolute value of the yaw axis angular velocity becomes smaller than the second threshold value. Specifically, the motion data creation unit 22 identifies the object the worker OP is looking at from the yaw axis angle and pitch axis angle at time t1. When the worker OP looks at the reception unit 61, he turns his face up and to the right, so a positive value is output for the yaw axis angle and a negative value is output for the pitch axis angle. When the worker OP looks at the workpiece W, he turns his face down and to the left, so a negative value is output for the yaw axis angle and a positive value is output for the pitch axis angle.
- the motion data creation unit 22 determines that the motion started at time ts1 is a "display check” motion to check the reception unit 61. Also, at time t2, the angle value of the yaw axis is negative, and the angle value of the pitch axis is positive. Therefore, the motion data creation unit 22 determines that the motion started at time t2 is a "work check” motion to check the work W. In this way, the motion data creation unit 22 determines whether the extracted motion is a "display check" motion or a "work check” motion.
- the motion data creation unit 22 determines the start time and motion duration for each motion.
- the motion is a motion to look at the reception unit 61 or the work W. Therefore, the motion data creation unit 22 determines the time when the motion started to look at the reception unit 61 or the work W as the start time of the motion. Then, the motion duration is the time until the next motion is started. Specifically, for "Operation 1," time t1 is the start time, and the period from time t1 to time ts2 is the operation period.
- the action data 32 is data in which actions are arranged in chronological order.
- Each action in the action data 32 is associated with an action type, a start time, and an action period.
- the action types are "display check” and "work check.”
- the start time may be indicated by the elapsed time from the evaluation start time, rather than the actual time.
- the method by which the motion data creation unit 22 extracts motions is not limited to the above.
- the motion data creation unit 22 may determine the period during which the angle is within a predetermined reference range as the motion period.
- the reference range corresponds to the angle at which the worker OP is facing in order to view the object.
- the reference range is, for example, a range of +10 degrees or more and +20 degrees or less, and a range of -10 degrees or more and -20 degrees or less.
- the motion data creation unit 22 When the motion data creation unit 22 finishes creating the motion data 32, it stores the created motion data 32 in the storage unit 30 and requests the evaluation unit 23 to perform the evaluation process. When requested, the evaluation unit 23 performs the evaluation process using the motion data 32. In this embodiment, the evaluation unit 23 evaluates the proficiency by comparing the motion data 32 with pre-stored reference data 33.
- the reference data 33 is the same data as the motion data 32, and is predetermined data in which reference motions that serve as the basis for motions during a target period are arranged in chronological order. In this embodiment, the reference data 33 is data created in the same manner as the motion data 32.
- the motion data creation unit 22 assigns a number to each motion in chronological order, starting from “1", for each of the reference data 33 and the motion data 32.
- action 1 the action numbered "1" will be referred to as "action 1."
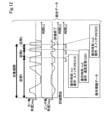
- FIG. 7 is a diagram comparing the detection values of the motion sensor 81 of a beginner, who is a worker OP with a low level of proficiency, with the detection values of the motion sensor 81 of an expert.
- FIG. 7 is a diagram similar to FIG. 6. The time on the horizontal axis of each graph for the beginner and the time on the horizontal axis of each graph for the expert are aligned so that the elapsed time from the evaluation start time matches each other.
- the target period of an expert is shorter than that of a beginner. This is because the expert does not perform any actions other than the actions of carrying out the processing steps specified in the pressing process shown in Figure 4. Specifically, the expert performs "action 1" corresponding to step S12, "action 2" corresponding to step S14, and "action 3" corresponding to step S16. Therefore, by comparing the action data 32 of the beginner with the action data 32 of the expert, it is possible to analyze the reason why the target period of the beginner is longer.
- FIG. 8 is a flowchart showing the procedure of the evaluation process performed by the evaluation unit 23.
- the evaluation method is realized by the evaluation process.
- FIG. 9 is a diagram for explaining the evaluation process.
- the evaluation process will be explained using the example shown in FIG. 9.
- the actions included in the reference data 33 and the action data 32 are associated with either "type A" or "type B".
- the order of the actions included in the reference data 33 and the action data 32 is as shown in FIG. 9.
- the reference data 33 indicates that "action 1", "action 2", and "action 3" were performed in that order.
- step S30 of FIG. 8 the evaluation unit 23 sets the variable N, constant Ns, variable M, and constant Ms used in the evaluation process to initial values. Specifically, the evaluation unit 23 sets both the variable N and the variable M to "1". The evaluation unit 23 sets the variable Ns to the number of movements included in the reference data 33. The evaluation unit 23 sets the variable Ms to the number of movements included in the movement data 32. In the case of FIG. 9, the reference data 33 includes three movements, so the evaluation unit 23 sets the constant Ns to "3". In the case of FIG. 9, the movement data 32 includes three movements, so the evaluation unit 23 sets the constant Ms to "3".
- step S32 the evaluation unit 23 judges whether or not the motion type of the Nth motion in the reference data 33 matches the motion type of the Mth motion in the motion data 32. If it is judged that the motion type of the Nth motion in the reference data 33 matches the motion type of the Mth motion in the motion data 32, the evaluation unit 23 judges in step S36 whether or not the motion period of the Mth motion is longer than the motion period of the Nth motion of the reference motion. If it is judged that the motion period of the Mth motion is longer than the motion period of the Nth motion of the reference motion, the evaluation unit 23 assigns a "period length" label as a first time label to the Mth motion of the motion data 32 in step S40. Having finished the evaluation of the Mth motion, the evaluation unit 23 increments the variable M in step S42.
- step S32 If it is determined in step S32 that the motion duration of the Mth motion is not longer than the motion duration of the Nth motion in the reference motion, the evaluation unit 23 assigns an "evaluated" label to the Mth motion in the reference data 33 in step S38, and the process proceeds to step S42.
- the evaluation unit 23 assigns a "missing action" label as a second action label to the Nth action in the reference data 33 in step S34 as the first assignment process.
- step S40 or step S42 the evaluation unit 23 has finished the evaluation using the Nth operation of the reference data 33, and therefore increments the variable N in step S44.
- step S46 the evaluation unit 23 judges whether the variable N is equal to or greater than the constant Ns. If it is determined in step S46 that the variable N is not equal to or greater than the constant Ns, there are still movements in the reference data 33 that have not been evaluated, so in step S48 the evaluation unit 23 judges whether the variable M is equal to or greater than the constant Ms. If it is determined in step S48 that the variable M is not equal to or greater than the constant Ms, there are still movements in the movement data 32 that have not been evaluated, so the evaluation unit 23 returns to step S32.
- step S46 If it is determined in step S46 that the variable N is equal to or greater than the constant Ns, then evaluation of all the movements in the reference data 33 has been completed, and the evaluation unit 23 determines in step S50 whether or not a label has been assigned to all the movements in the movement data 32. If it is determined in step S50 that a label has not been assigned to all the movements in the movement data 32, the evaluation unit 23 assigns the "unnecessary movement" label as the second movement label to the Mth and subsequent movements in the movement data 32 in step S52 as the second assignment process, and ends this processing routine. If it is determined in step S50 that a label has been assigned to all the movements in the movement data 32, the evaluation unit 23 ends this processing routine.
- step S54 determines whether or not labels have been assigned to all of the actions in the action data 32, similar to step S50. If it is determined in step S54 that labels have not been assigned to all of the actions in the action data 32, then in step S56 the evaluation unit 23 assigns a "missing action" label as the first action label to the Nth and subsequent actions, and ends this processing routine. If it is determined in step S54 that labels have been assigned to all of the actions in the action data 32, then the evaluation unit 23 ends this processing routine.
- step S32 the first action "action 1" in the reference data 33 is compared with the first action "action 1" in the action data 32. Since the types of "action 1" in the reference data 33 and “action 1" in the action data 32 are both "Type A", the result is determined as "YES” in step S32.
- step S36 if the action period of "action 1" in the action data 32 is longer than the action period of "action 1" in the reference data 33, in step S40, a "duration length” label is assigned to "action 1" in the action data 32.
- step S36 if the action period of "action 1" in the action data 32 is not longer than the action period of "action 1" in the reference data 33, in step S38, a "evaluated” label is assigned to "action 1" in the action data 32.
- step S42 the variable M is updated to "2".
- step S44 the variable N is updated to "2".
- the constants Ns and Ms are both "3", so if the variable N is "2" and the variable M is "2", both steps S46 and S48 are judged as "NO".
- step S32 After starting the evaluation process, in the second iteration of step S32, "motion 2", the second motion in reference data 33, is compared with "motion 2", the second motion in motion data 32. Since the type of "motion 2" in reference data 33 is “type B" while the type of "motion 2" in motion data 32 is “type A”, the result is determined as "NO” in step S32. Therefore, in step S34, a "missing motion” label is assigned to "motion 2" in reference data 33. In step S44, the variable N is updated to "3".
- step S32 for the third time after starting the evaluation process "Movement 3", the third movement in the reference data 33, is compared with "Movement 2", the second movement in the movement data 32. Since the type of "Movement 3" in the reference data 33 and the type of "Movement 2" in the movement data 32 are both "Type A”, the evaluation process is started and, as in the initial processing flow, either the "Duration length” label or the “Evaluated” label is assigned to "Movement 2" in the movement data 32.
- step S42 the variable M is updated to "3".
- step S44 the variable N is updated to "4". Therefore, in step S46, the result is determined to be "YES”.
- step S50 since no label has been assigned to "Action 3" in the action data 32, the result is determined to be "NO”.
- step S52 the "unnecessary action" label is assigned to "Action 3" in the action data 32.
- the reference data 33 contains all the actions necessary for the process, by comparing the reference actions contained in the reference data 33 with the actions contained in the action data 32 in chronological order, it is possible to evaluate whether the action data 32 contains any missing actions or unnecessary actions. Furthermore, when the same action type is performed in the reference data 33 and the action data 32, it is possible to evaluate whether the action is taking a long time by comparing the action period of the action data 32 with the action time of the reference data 33.
- the evaluation unit 23 When the evaluation unit 23 finishes the evaluation process, it passes on the evaluation data, in which the action data 32 is associated with the reference data 33 and a label is assigned to each action, to the evaluation program 34, as shown in FIG. 9.
- the evaluation program 34 displays the evaluation data passed on to it on the display of the information processing device 10.
- the method of outputting the evaluation data is not limited to a form of outputting as image data, and may be, for example, text data in which actions are associated with labels.
- the evaluation unit 23 also performs an evaluation process to evaluate the proficiency of the worker OP using evaluation data indicating the status of the assignment of the "omission action” label and the "unnecessary action” label.
- the evaluation unit 23 performs an evaluation such that the greater the number of "omission action” labels or "unnecessary action” labels, the lower the proficiency.
- the evaluation unit 23 may deduct points for actions that have been assigned either the "omission action” label or the "unnecessary action” label, and calculate the total value for all actions as the proficiency.
- the evaluation unit 23 may also add up the number of "omission action” labels and the number of "unnecessary action” labels, and determine a rank as the proficiency using a correspondence table in which the number of labels is associated with a rank.
- the evaluation unit 23 evaluates the proficiency by comparing the reference data 33 with the action data 32.
- the evaluation unit 23 may perform a first time evaluation process in which a first time label is attached to each of the multiple actions included in the action data 32 when the action time from the start of the action to the end of the action is longer than a predetermined reference action time.
- a first time evaluation process in which a first time label is attached to each of the multiple actions included in the action data 32 when the action time from the start of the action to the end of the action is longer than a predetermined reference action time.
- the evaluation unit 23 may perform a second time evaluation process of attaching a second time label to a target action when the action interval between one target action among the multiple actions included in the action data 32 and the next action of the target action is longer than a predetermined reference action interval.
- the evaluation unit 23 attaches a second time label to "action 1" when the time from the end time ts2 of "action 1" which is a target action shown in FIG. 6 to the start time t2 of "action 2" is longer than a predetermined reference action interval.
- the evaluation unit 23 similarly performs the second time evaluation process for other action intervals, for example, the interval between "action 1" and "action 2".
- the reference action interval may be set to a common interval for multiple action intervals, or may be set to a different interval from each other.
- the evaluation unit 23 performs an evaluation process to evaluate the proficiency of the worker OP using evaluation data indicating the attachment status of the first time labels and the attachment status of the second time labels, similar to the evaluation process described above. In other words, the evaluation unit 23 performs an evaluation such that the greater the number of first time labels or second time labels, the lower the proficiency.
- the evaluation unit 23 may perform only one of the first time evaluation process or the second time evaluation process.
- Training function details In training by the evaluation system 1, instructions for the next process to be performed are output to the worker OP by voice from the sound conversion unit 82.
- the sensor data creation unit 21 creates the action data 32.
- the determination unit 24 sequentially creates the sensor data 31 during the period when the worker OP is working. The determination unit 24 extracts actions using the sensor data 31, similar to the sensor data creation unit 21. Then, the determination unit 24 compares the extracted action with the reference data 33 to determine the next action that the worker OP should perform next.
- the reference data 33 used in the training function includes not only the target period but all actions performed in the process.
- FIG. 10 is a flowchart showing the procedure of the training process.
- the worker OP starts the training program 35 in the information processing device 10.
- the training program 35 requests the output unit 25 to perform step S60.
- step S60 the output unit 25 instructs the first operation of the reference data 33. Specifically, the output unit 25 transmits voice data as sound data of a message instructing the next operation to the ear-worn device 80. This causes the sound conversion unit 82 of the ear-worn device 80 to output a voice instruction. The worker OP hears the voice instruction and performs the first operation.
- step S62 the decision unit 24 determines whether or not the worker OP has started to move. Specifically, when the decision unit 24 determines that the angular velocity of the yaw axis has become greater than the first threshold value, it determines that the worker OP has started to move.
- step S62 If it is determined in step S62 that the operation has not started, the decision unit 24 repeatedly executes step S62 at predetermined time intervals until it determines that the operation has started.
- the predetermined time is, for example, several ms.
- the determination unit 24 identifies the type of motion in step S64. Specifically, similar to the motion data creation unit 22, the determination unit 24 identifies the type of motion using the angular velocity and angle of the yaw axis and the angular velocity and angle of the pitch axis.
- step S66 the determination unit 24 judges whether the identified motion matches the motion of the reference data 33. Specifically, the determination unit 24 compares the motions of the reference data 33 starting from the first motion. If the identified motion type matches the motion type of the motion to be compared in the reference data 33, the determination unit 24 judges that the identified motion matches the motion of the reference data 33. On the other hand, if the identified motion type does not match the motion type of the motion to be compared in the reference data 33, the determination unit 24 judges that the identified motion does not match the motion of the reference data 33. If it is determined that the identified motion does not match the motion of the reference data 33, the determination unit 24 requests the output unit 25 to perform step S68.
- step S68 the output unit 25 outputs audio data instructing the reference motion of the reference data 33 to the sound conversion unit 82. Specifically, the output unit 25 transmits audio data of a message instructing the reference motion to the ear-worn device 80. This causes the audio instruction to be output from the sound conversion unit 82 of the ear-worn device 80. The worker OP hears the audio instruction and performs the standard action. After the output unit 25 performs step S68, the decision unit 24 returns the process to step S62.
- step S66 determines whether the process has ended in step S70 as the first output process. If it is determined in step S70 that the process has not ended, the decision unit 24 requests the output unit 25 to perform step S72.
- the output unit 25 instructs the next action of the reference data 33 in step S72 as the first output process. Specifically, the output unit 25 transmits audio data of a message instructing the next action of the reference to the ear-worn device 80. This causes the sound conversion unit 82 of the ear-worn device 80 to output an instruction sound.
- step S72 the decision unit 24 returns the process to step S62. If it is determined in step S70 that the process has ended, the decision unit 24 ends this processing routine.
- the evaluation program 34 displays a message indicating the end of training on the display of the information processing device 10.
- the output unit 25 outputs voice data instructing the next operation to the sound conversion device.
- the evaluation system 1 may include a display unit that displays information, and the output unit 25 may perform a second output process in which display data including information instructing the next operation is output to the display unit.
- the output unit 25 outputs display data including text information such as "Please press the switch next" to the display unit. This allows the worker OP to perform the next step by looking at the text displayed on the display unit.
- the second output process may be performed instead of the first output process, or both the second output process and the first output process may be performed.
- the display of the information processing device 10 may be used as the display unit.
- a display separate from the information processing device 10 may be used as the display unit.
- the evaluation system 1 includes a sensor data creation unit 21, a motion data creation unit 22, and an evaluation unit 23.
- the sensor data creation unit 21 creates sensor data 31 that associates detection values output from a motion sensor 81 attached to the head of the worker OP with elapsed time.
- the motion data creation unit 22 uses the sensor data 31 to extract head movements, and creates motion data 32 that associates the extracted movements with elapsed time.
- the evaluation unit 23 can accurately evaluate the proficiency level by using the data on the head movements of the worker OP for evaluation. Even if the process time is short, there is a possibility that a necessary movement has been omitted. Therefore, by using the data on the head movements of the worker OP for evaluation, it is possible to evaluate whether or not a necessary movement has been omitted, and therefore an accurate evaluation can be performed.
- an evaluation system 1 with high freedom of installation can be provided.
- one method of acquiring the movements of the worker OP as analyzable electronic data is to install a camera in a position where the movements of the worker OP can be captured and acquire the video. In this case, however, space is required to install the camera.
- a motion sensor 81 attached to the worker OP there is no need to secure space to install the camera. Therefore, the evaluation system 1 can be installed even in places where it is difficult to secure sufficient space, and an evaluation system 1 with high freedom of installation can be provided.
- the evaluation unit 23 evaluates the proficiency by comparing the reference data 33 with the action data 32. As a result, the evaluation unit 23 can evaluate the proficiency by comparing the reference data 33 with the action data 32.
- the evaluation unit 23 performs step S32 as a judgment process, step S34 as a first assignment process, and step S50 as a second assignment process.
- step S34 if it is determined that a reference action included in the reference data 33 is not included in the action data 32, a "missing action" label is assigned to the action determined not to be included. An action to which the "missing action” label is assigned indicates that the action was not performed by the worker OP despite being a necessary action.
- step S50 if it is determined that an action included in the action data 32 is not included in the reference data 33, a "unnecessary action" label is assigned to the action determined not to be included.
- An action to which the "unnecessary action” label is assigned indicates that the action was not performed by the worker OP. Therefore, by assigning the "missing action” label and the "unnecessary action” label, evaluation can be performed more accurately.
- the reference data 33 is also motion data 32 created using sensor data 31 acquired while the skilled worker is operating the press-fitting device 60. This allows the skilled worker's motion data 32 to be used as the reference data 33. Because the reference data 33 is data acquired while the skilled worker is actually performing the work, data that reflects the actual situation can be used as the reference data 33.
- a first time label is assigned.
- a second time label is assigned.
- an action assigned with a first time label indicates that it takes a long time to perform an action.
- An action assigned with a second time label indicates that it takes a long time to perform the next action.
- the evaluation system 1 also includes a determination unit 24 and an output unit 25.
- the determination unit 24 extracts an action using the sensor data 31, and determines the next reference action that is the next reference action that the worker OP should perform by comparing the extracted action with the reference data 33.
- the output unit 25 outputs voice data instructing the next action to the sound conversion unit 82. Therefore, the evaluation system 1 can be used to provide training to beginners.
- the motion sensor 81 is built into the ear-worn device 80. Therefore, the motion sensor 81 built into the ear-worn device 80 can be used for evaluation.
- Fig. 11 is a block diagram of an information processing device 10 according to a second embodiment.
- Fig. 12 is a diagram for explaining the relationship between a target period and a section according to this embodiment.
- the second embodiment in addition to the detection value of the motion sensor 81, information on the operation received by the press-fitting device 60 is used for evaluation.
- the same reference numerals are used for the same configurations and processing steps as those in the first embodiment, and detailed explanations are omitted as appropriate.
- the information processing device 10 has, in addition to the configuration of the first embodiment, an operation information acquisition unit 26 and an integrated data creation unit 27 as functional units of the processor 20.
- the storage unit 30 stores sensor data 31, motion data 32, reference data 33, an evaluation program 34, operation information data 67, and integrated data 36.
- the processes from step S12 to step S16 in the press-fit process shown in FIG. 4 are the subject of evaluation.
- all processes from step S12 to step S22 in the press-fit process are the subject of evaluation.
- the operator OP in addition to the operation at the reception unit 61 at step S16, the operator OP also operates the reception unit 61 at steps S20 and S22. Therefore, in the multiple section evaluation process, the evaluation unit 23 divides the operation data 32 into multiple sections using operations as separators, and performs evaluation processing for each section. This allows for accurate correspondence between the operations of the reference data 33 and the operations of the operation data 32, improving the accuracy of the evaluation.
- the operation information acquisition unit 26 shown in FIG. 11 acquires operation information data 67 from the pressing device 60, and associates the time associated with the operation information with the elapsed time from the start time of the target period.
- the operation information data 67 is data in which the elapsed time from the evaluation start time is associated with operation information.
- the operation information data 67 shown in FIG. 12 indicates that at time to1, an operation is performed to set the descent switch corresponding to step S18 to the on state, at time to2, an operation is performed to change the descent speed corresponding to step S20, and at time to3, an operation is performed to set the descent switch corresponding to step S22 to the on state.
- the integrated data creation unit 27 shown in FIG. 11 creates integrated data 36 that associates the sensor data 31 with the operation information data 67 so that their respective time axes correspond to the elapsed time from the evaluation start time. As shown in FIG. 12, the integrated data 36 makes it possible to associate the head movement of the worker OP indicated by the sensor data 31 with the operation performed by the worker OP.
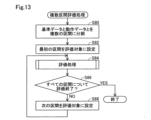
- FIG. 13 is a flowchart showing the procedure of the multiple section evaluation process performed by the evaluation unit 23.
- the evaluation unit 23 uses the operation information data 67 to divide the motion data 32 into multiple sections, with each piece of operation information being a separator.
- step S18 is performed at time to1
- step S20 is performed at time to2
- step S22 is performed at time to3.
- the evaluation unit 23 divides the evaluation period into three sections: "Section 1" from the evaluation start time to time to1, "Section 2" from time to1 to time to2, and "Section 3" from time to2 to time to3.
- step S82 the evaluation unit 23 sets the first section, "Section 1", as the evaluation target.
- step S84 the evaluation unit 23 performs the evaluation process shown in FIG. 8 as a sub-processing routine for the section to be evaluated.
- step S86 the evaluation unit 23 judges whether the evaluation has been completed for all sections. If it is judged in step S86 that the evaluation has not been completed for all sections, the evaluation unit 23 sets the next section as the evaluation target in step S88 and returns the process to step S84. On the other hand, if it is judged in step S86 that the evaluation has been completed for all sections, the evaluation unit 23 ends this processing routine. When the evaluation unit 23 ends the multiple section evaluation process, it passes the evaluation data to the evaluation program 34. In addition, the evaluation unit 23 performs an evaluation process to evaluate the proficiency of the worker OP using the evaluation data indicating the status of the assignment of the "missing action" label and the status of the assignment of the "unnecessary action" label.
- the evaluation system 1 includes an operation information acquisition unit 26 that acquires operation information data 67, and an evaluation unit 23.
- the evaluation unit 23 uses the operation information data 67 to divide the movement data 32 into a plurality of sections using the operation information as a separator, and performs evaluation by setting each of the plurality of sections as a target section.
- the movement data 32 includes a plurality of movements associated with the operation of the reception unit 61
- the sections are divided using the operations as separators, and the accuracy of the evaluation can be improved by associating the movements of the reference data 33 with the movements of the movement data 32 for each section.
- FIG. 14 is a block diagram of an information processing device 10 according to a third embodiment.
- the voice uttered by the worker OP is set as a subject for evaluating the proficiency.
- the process may include a so-called pointing confirmation call by the worker OP, such as "Speed, OK," as a standard process. Therefore, in this embodiment, the voice uttered by the worker OP is added to the evaluation subjects.
- the same configurations and processing steps as those in the above embodiments are given the same reference numerals, and detailed explanations are omitted as appropriate.
- the information processing device 10 further includes, as functional parts of the processor 20, a voice data creation part 28 and a call data creation part 29.
- the storage part 30 stores sensor data 31, motion data 32, reference data 33, an evaluation program 34, integrated data 36, voice time series data 37, and call data 38.
- the voice data creation unit 28 acquires voice data output from the microphone 83 shown in FIG. 2, and creates voice time series data 37 that associates the acquired voice data with the elapsed time from the start time of the target period.
- the call data creation unit 29 uses the voice time series data 37 to extract calls from the worker OP, and creates call data 38 that associates the extracted calls with the elapsed time. Specifically, the call data creation unit 29 determines that a voice was uttered by the worker OP at the time when the sound pressure level [dB] indicated by the voice time series data 37 exceeded a predetermined reference sound pressure level [dB], and extracts it as a call.
- the call data creation unit 29 may extract the text information as a "call” using a program that converts general-purpose voice data into text information indicated by the voice.
- the integrated data creation unit 27 creates integrated data 36 in which the actions included in the action data 32 and the calls included in the call data 38 are arranged in chronological order using the elapsed time associated with each.
- the reference data 33 includes a reference call that serves as the standard for calls during the target period. The reference actions and reference calls included in the reference data 33 are arranged in chronological order according to the predetermined standard procedure of the process.
- the evaluation unit 23 treats the calls included in the integrated data 36 in the same way as the actions included in the sensor data 31, and performs the evaluation process in the same way as in the first embodiment. That is, if a reference call included in the reference data 33 is not included in the integrated data 36, the evaluation unit 23 assigns a label of "missing call” to the reference call included in the reference data 33. On the other hand, if a call included in the integrated data 36 is not included in the reference data 33, the evaluation unit 23 assigns a label of "unnecessary call" to the call included in the integrated data 36.
- the evaluation unit 23 may evaluate the action data 32 and the call data 38 using separate processing routines. Specifically, the evaluation unit 23 performs the same evaluation process as in the first embodiment, and when evaluating the call, the evaluation unit 23 may evaluate the proficiency level by comparing the call data 38 with reference call data that includes a reference call, in addition to the reference data 33 that includes the reference action.
- the evaluation system 1 includes a voice data creation unit 28, a call data creation unit 29, and an integrated data creation unit 27.
- the call data creation unit 29 extracts the calls of the worker OP using the voice time series data 37 created by the voice data creation unit 28, and creates call data 38 that associates the extracted calls with elapsed time.
- the integrated data creation unit 27 creates integrated data 36 that arranges the actions included in the action data 32 and the calls included in the call data 38 in chronological order using the elapsed time associated with each.
- the evaluation unit 23 evaluates the proficiency by comparing the integrated data 36 with the reference data 33.
- the voice uttered by the worker OP can also be included in the evaluation, further improving the accuracy of the evaluation.
- the information processing device 10 is disposed near the press-fitting device 60.
- the information processing device 10 may be disposed at a location remote from the press-fitting device 60. Exchange of information between the information processing device 10, the press-fitting device 60, and the mobile terminal device 90 is performed via a network. Therefore, even if the information processing device 10 is disposed at a remote location away from the factory where the press-fitting device 60 is disposed, data can be exchanged by communication via a network including the Internet, for example. Thus, the evaluation of proficiency by the evaluation system 1 can be realized.
- the evaluation unit 23 evaluates the proficiency level using the "missing action” label and the "unnecessary action” label of the evaluation data.
- the evaluation unit 23 may further evaluate the proficiency level using the "evaluated” label and the "duration” label. Specifically, points may be added for actions that have been assigned the “evaluated” label, points may be subtracted for actions that have been assigned the "duration” label, the "missing action” label, or the “unnecessary action” label, and the total value for all actions may be calculated as the proficiency level.
- the evaluation unit 23 can visualize the proficiency level by calculating the proficiency level as a value.
- the voice data emitted by the worker OP is evaluated. Furthermore, the detection value of a motion sensor for detecting the arm movement of the worker OP may be added to the evaluation target. Specifically, a motion sensor similar to the motion sensor 81 is built into a wristband type device worn on the wrist of the worker OP. Then, the motion data creation unit 22 extracts the wrist movement using the detection value of the motion sensor built into the wristband type device. According to this embodiment, the arm movement of the worker OP can also be added to the evaluation target, so that the accuracy of the proficiency evaluation can be further improved.
- the voice data emitted by the worker OP is evaluated. Furthermore, the detection value of a sensor built into the power assist suit worn by the worker OP may also be added to the evaluation target.
- the power assist suit is a device that supports the movement of the worker OP, for example, the movement of the waist.
- the sensor built into the power assist suit detects the angle of the waist of the worker OP. Therefore, according to this embodiment, the waist movement of the worker OP can also be added to the evaluation target, so that the evaluation of the proficiency level can be performed in more detail.
- the press-fitting device 60 is exemplified as the device.
- the device is not limited to the press-fitting device 60.
- the evaluation system 1 can be applied to a device that requires operation by the worker OP in the process. Furthermore, the evaluation system 1 is more preferably applied to the evaluation of the worker OP who operates a machine tool, for example, whose process time and processing quality vary depending on the proficiency of the worker OP.
- the actions of changing the direction of the face such as "display confirmation" and "work confirmation" are exemplified as the actions, but are not limited to this.
- the actions of the worker OP that change the position of the head can be included in the evaluation target.
- the actions that change the position of the head can be extracted using the detection value of the acceleration sensor of the motion sensor 81.
- the method of determining the start time and the duration of the action may be determined according to the type of action. That is, for example, in the case of walking, the walking action itself may be extracted as the action, and the action of placing the work W after walking may be extracted.
- the evaluation system 1 may further include a proficiency evaluation unit that evaluates changes in proficiency.
- the evaluation system 1 further includes a sensor that detects the pulse rate of the worker OP and a sensor that detects temperature and humidity.
- the evaluation unit 23 continuously evaluates the proficiency of the same worker OP, for example, every day for a week. For the same worker OP, the proficiency is unlikely to change significantly in a short period of time. Therefore, when the proficiency changes significantly, it is assumed that the physical condition of the worker OP is deteriorating or the temperature and humidity are not appropriate. Therefore, the proficiency evaluation unit obtains the amount of change in the proficiency, and if it is greater than a predetermined standard amount of change, it determines whether the pulse, temperature, and humidity are outside the standard range.
- the proficiency evaluation unit determines that the pulse, temperature, and humidity are outside the standard range, it transmits an alarm to, for example, an information processing device managed by the supervisor of the worker OP.
- the change in proficiency may be the change in a numerical value that quantifies the proficiency, as in (D2) above, or the change in the length of the target period of the motion data 32, or the change in the motion time of the motion in the motion data 32.
- step S34 and step S52 are performed in the evaluation process, but only one of the processing steps may be performed.
- step S34 it is possible to determine that the motion data 32 does not contain a necessary motion.
- step S52 it is possible to determine that the motion data 32 contains an unnecessary motion.
Landscapes
- Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Engineering & Computer Science (AREA)
- Strategic Management (AREA)
- Development Economics (AREA)
- Economics (AREA)
- Entrepreneurship & Innovation (AREA)
- Educational Administration (AREA)
- Operations Research (AREA)
- Marketing (AREA)
- Game Theory and Decision Science (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Physics & Mathematics (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Factory Administration (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025535499A JPWO2025022612A1 (https=) | 2023-07-26 | 2023-07-26 | |
| PCT/JP2023/027409 WO2025022612A1 (ja) | 2023-07-26 | 2023-07-26 | 評価システムおよび評価方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/027409 WO2025022612A1 (ja) | 2023-07-26 | 2023-07-26 | 評価システムおよび評価方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025022612A1 true WO2025022612A1 (ja) | 2025-01-30 |
Family
ID=94374745
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/027409 Pending WO2025022612A1 (ja) | 2023-07-26 | 2023-07-26 | 評価システムおよび評価方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025022612A1 (https=) |
| WO (1) | WO2025022612A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120011758A (zh) * | 2025-04-18 | 2025-05-16 | 湖南高铁时代数字化科技有限公司 | 基于姿态识别的城轨交通手指口呼系统 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014026318A (ja) * | 2012-07-24 | 2014-02-06 | Ricoh Co Ltd | 電力管理装置、電力管理システム、電力管理方法およびプログラム |
| JP2017228030A (ja) * | 2016-06-21 | 2017-12-28 | 日本電気株式会社 | 作業支援システム、管理サーバ、携帯端末、作業支援方法およびプログラム |
| JP2019061640A (ja) * | 2017-09-27 | 2019-04-18 | ソフトバンク株式会社 | 監視システム |
| JP2021152979A (ja) * | 2017-10-30 | 2021-09-30 | Necフィールディング株式会社 | 作業支援装置、作業支援方法及びプログラム |
| JP2022015794A (ja) * | 2020-07-10 | 2022-01-21 | 株式会社日立製作所 | 作業評価システムおよび方法 |
| JP2022103336A (ja) * | 2019-05-20 | 2022-07-07 | 株式会社日立システムズ | 作業支援システムおよび作業支援方法 |
| JP2023028120A (ja) * | 2021-08-18 | 2023-03-03 | 株式会社日立産機システム | 作業支援システムおよび作業支援方法 |
-
2023
- 2023-07-26 JP JP2025535499A patent/JPWO2025022612A1/ja active Pending
- 2023-07-26 WO PCT/JP2023/027409 patent/WO2025022612A1/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014026318A (ja) * | 2012-07-24 | 2014-02-06 | Ricoh Co Ltd | 電力管理装置、電力管理システム、電力管理方法およびプログラム |
| JP2017228030A (ja) * | 2016-06-21 | 2017-12-28 | 日本電気株式会社 | 作業支援システム、管理サーバ、携帯端末、作業支援方法およびプログラム |
| JP2019061640A (ja) * | 2017-09-27 | 2019-04-18 | ソフトバンク株式会社 | 監視システム |
| JP2021152979A (ja) * | 2017-10-30 | 2021-09-30 | Necフィールディング株式会社 | 作業支援装置、作業支援方法及びプログラム |
| JP2022103336A (ja) * | 2019-05-20 | 2022-07-07 | 株式会社日立システムズ | 作業支援システムおよび作業支援方法 |
| JP2022015794A (ja) * | 2020-07-10 | 2022-01-21 | 株式会社日立製作所 | 作業評価システムおよび方法 |
| JP2023028120A (ja) * | 2021-08-18 | 2023-03-03 | 株式会社日立産機システム | 作業支援システムおよび作業支援方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120011758A (zh) * | 2025-04-18 | 2025-05-16 | 湖南高铁时代数字化科技有限公司 | 基于姿态识别的城轨交通手指口呼系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025022612A1 (https=) | 2025-01-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11192249B2 (en) | Simulation device for robot | |
| JP7191560B2 (ja) | コンテンツ作成システム | |
| JP2002132487A (ja) | 遠隔作業支援システム | |
| JPWO2013035244A1 (ja) | ロボットアームの制御装置及び制御方法、ロボット、制御プログラム、並びに、集積電子回路 | |
| JP2008307207A (ja) | 動作計測装置 | |
| US11137600B2 (en) | Display device, display control method, and display system | |
| US10133900B2 (en) | Controlling the output of contextual information using a computing device | |
| WO2025022612A1 (ja) | 評価システムおよび評価方法 | |
| CN110303499B (zh) | 一种机械臂归位方法及装置 | |
| JPWO2020012955A1 (ja) | 情報処理装置、情報処理方法、およびプログラム | |
| CN104583884A (zh) | 具有单独控制设备的用于尺寸的测量和特征参量的测量装置 | |
| JP6625266B1 (ja) | ロボット制御装置 | |
| CN102236030A (zh) | 一种惯性测量模拟分析方法、终端及系统 | |
| JP2017199151A (ja) | 作業指示システム | |
| JP2010271928A (ja) | 作業アシストシステム及び作業アシスト方法並びに該作業アシスト方法を記録した記録媒体 | |
| CN117336337A (zh) | 远程操作系统与方法以及存储介质 | |
| CN209911926U (zh) | 电缆附件制作指引系统 | |
| US20210191516A1 (en) | Tactile feedback device and operation method thereof | |
| JP7084256B2 (ja) | 作業支援システムおよび作業支援方法 | |
| JP7588545B2 (ja) | 遠隔操作制御システム、遠隔操作制御方法、およびプログラム | |
| JP2021010391A (ja) | 電子機器および情報処理システム | |
| US20230328371A1 (en) | Wearable terminal | |
| CN109571423A (zh) | 机器人控制系统、机器人控制方法及机器人控制系统用的用户设备 | |
| WO2022209638A1 (ja) | 作業指示システム | |
| CN112243114B (zh) | 一种切换投影设备工作模式的方法、装置和投影设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23946694 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025535499 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025535499 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |