WO2024262409A1 - 制御装置及び駐車場判定方法 - Google Patents
制御装置及び駐車場判定方法 Download PDFInfo
- Publication number
- WO2024262409A1 WO2024262409A1 PCT/JP2024/021531 JP2024021531W WO2024262409A1 WO 2024262409 A1 WO2024262409 A1 WO 2024262409A1 JP 2024021531 W JP2024021531 W JP 2024021531W WO 2024262409 A1 WO2024262409 A1 WO 2024262409A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- parking
- vehicle
- parking space
- control device
- parking lot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Definitions
- This disclosure relates to a control device and a parking lot determination method.
- Patent Document 1 discloses a parking lot determination method that extracts markings on the road surface from an image captured by a camera, and determines the left-right similarity of a group of lines consisting of multiple markings detected on both the left and right sides of the vehicle to determine whether the vehicle is in a parking lot.
- a control device includes a parking position acquisition unit that acquires parked vehicles or parking spaces included in an image captured in front of the vehicle as parking positions, and a parking space determination unit that determines, as a parking space, an area including a rectangle that, starting from one parking position, surrounds a plurality of parking positions that are continuous from the starting point in a first direction and a plurality of parking positions that are continuous from the starting point in a second direction that intersects with the first direction.
- This embodiment improves the accuracy of determining whether a vehicle is in a parking lot compared to when the presence or absence of a vehicle is determined using only parked vehicles or parking spaces included in an image captured in front of the vehicle.
- the present disclosure can be realized in various forms, such as a parking lot determination method, a computer program, a recording medium, and a vehicle.
- FIG. 1 is an explanatory diagram showing a schematic configuration of a control device in a first embodiment
- FIG. 2 is a diagram showing an example of a parked vehicle and a parking space located in front of a vehicle
- FIG. 3 is a flowchart of a parking lot interior determination process executed by the control device.
- FIG. 4 is a schematic diagram illustrating a parking space
- FIG. 5 is a schematic diagram illustrating a parking space
- FIG. 6 is a schematic diagram illustrating an example in which parking spaces are present on both the left and right sides of a vehicle
- FIG. 7 is a schematic diagram illustrating a turning back parking condition.
- FIG. 1 is an explanatory diagram showing a schematic configuration of a control device in a first embodiment
- FIG. 2 is a diagram showing an example of a parked vehicle and a parking space located in front of a vehicle
- FIG. 3 is a flowchart of a parking lot interior determination process executed by the control device.
- FIG. 4 is a schematic diagram illustrating
- FIG. 8 is a schematic diagram illustrating a turning back parking condition.
- FIG. 9 is a schematic diagram illustrating the parking lot interior determination process when parking spaces exist on both the left and right sides of the vehicle;
- FIG. 10 is an explanatory diagram showing a schematic configuration of a control device in a second embodiment;
- FIG. 11 is a process diagram of a driving force suppression process executed by the control device.
- FIG. 12 is a diagram illustrating a parking space in another embodiment.
- the control device 100 shown in Fig. 1 is mounted on a vehicle 500.
- the control device 100 determines whether the vehicle 500 is present in a parking lot.
- the vehicle 500 may be any of a hybrid electric vehicle (HEV), a plug-in hybrid electric vehicle (PHEV), a fuel cell electric vehicle (FCEV), an electric vehicle (BEV), and an engine vehicle.
- the control device 100 is connected to a camera 201, a radar 202, and a driving state sensor 203 mounted on the vehicle 500 so as to be able to communicate with them.
- the camera 201 captures an image of the area ahead of the vehicle 500.
- the image may be a still image or a video.
- the camera 201 transmits the captured image to the control device 100.
- the radar 202 detects the distance, angle, relative speed, etc., of an object in front of the vehicle 500 by emitting radio waves ahead of the vehicle 500 and receiving the waves reflected by the object in front of the vehicle 500.
- the radar 202 transmits the detected distance, angle, etc., to the control device 100.
- the camera 201 and the radar 202 are also referred to as a forward recognition device.
- the driving condition sensor 203 is a sensor that detects information related to the driving condition of the vehicle 500.
- the driving condition sensor 203 is, for example, a vehicle speed sensor, an accelerator sensor, a brake sensor, a steering angle sensor, a turn signal switch, etc.
- the driving condition sensor 203 detects, for example, the vehicle speed of the vehicle 500, the amount of accelerator operation, the amount of brake operation, the steering angle, the operation state of the turn signal, etc.
- the driving condition sensor 203 transmits information related to the detected driving condition of the vehicle 500 to the control device 100.
- the control device 100 is configured as a computer including a CPU 101 and a storage unit 102. Specifically, the control device 100 is configured as an ECU (Electronic Control Unit).
- the storage unit 102 is configured with a ROM, RAM, a hard disk drive, etc.
- Various programs that control the operation of the control device 100 are stored in the storage unit 102.
- the CPU 101 executes the programs stored in the storage unit 102 to function as a parking position acquisition unit 10, a parking space determination unit 20, a driving trajectory prediction unit 30, and a parking lot interior determination unit 40.
- the parking position acquisition unit 10 acquires a parked vehicle PV or a parking space PF included in an image captured in front of the vehicle 500 as a parking position.
- the parking space PF is a parking space for one vehicle 500 to park.
- FIG. 2 shows a bird's-eye view of the vehicle 500, the parked vehicle PV, and the parking space PF located in front of the vehicle 500 from above.
- the image captured in front of the vehicle 500 includes one parked vehicle PV and two parking space PF.
- the parking position acquisition unit 10 acquires the one parked vehicle PV and two parking space PF described above as parking positions.
- the parking space PF is a parking space defined by a rectangle drawn on the road surface.
- the parking position acquisition unit 10 detects the parked vehicle PV or the parking space PF included in the image captured in front of the vehicle 500 using a machine learning model that has been trained in advance using an image captured of the parked vehicle PV and an image captured of the parking space PF.
- a convolutional neural network is used as an algorithm for the machine learning model.
- the available parking position acquisition unit 10 may use a method such as pattern matching or edge detection to detect the parked vehicle PV or the parking space PF included in the image captured in front of the vehicle 500.
- the parking space determination unit 20 determines, as a parking space, an area including a rectangle that includes a plurality of parking positions that are continuous from one parking position in a first direction from the starting point, and a plurality of parking positions that are continuous from the starting point in a second direction that intersects with the first direction. Parking spaces will be described later.
- the driving trajectory prediction unit 30 calculates a predicted driving trajectory of the vehicle 500 based on the driving state of the vehicle 500 acquired by the driving state sensor 203.
- the predicted driving trajectory means the trajectory that the vehicle 500 is predicted to travel if the current driving state of the vehicle 500 is maintained.
- the driving trajectory prediction unit 30 calculates the predicted driving trajectory based on, for example, the vehicle speed acquired by a vehicle speed sensor and the steering angle acquired by a steering angle sensor.
- the parking lot determination unit 40 determines whether the vehicle 500 is in a parking lot based on the relative positional relationship between the vehicle 500 and the parking space.
- the control device 100 When the vehicle 500 is traveling at a speed equal to or lower than a predetermined speed, or when the vehicle 500 is stopped, the control device 100 repeatedly executes the parking lot determination process shown in FIG. 3 at a predetermined cycle.
- the parking lot determination process will be described below with reference to FIG. 3 to FIG. 8.
- step S10 of FIG. 3 the available parking position acquisition unit 10 searches for a parked vehicle PV or a parking space PF included in the image captured by the camera 201.
- step S20 the available parking position acquisition unit 10 determines whether or not a parked vehicle PV or a parking space PF is included in the image captured by the camera 201. If it is determined that a parked vehicle PV or a parking space PF is included in the image, the control device 100 executes step S30. If it is determined that a parked vehicle PV or a parking space PF is not included in the image, the control device 100 returns the process to step S10.
- the available parking position acquisition unit 10 acquires the parked vehicle PV or parking space PF included in the image captured by the camera 201 as a available parking position.
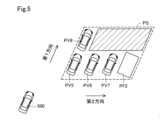
- the image captured by the camera 201 includes the parked vehicle PV1, the parked vehicle PV2, the parked vehicle PV3, the parking space PF1, and the parked vehicle PV4.
- the available parking position acquisition unit 10 acquires the parked vehicle PV1, the parked vehicle PV2, the parked vehicle PV3, the parking space PF1, and the parked vehicle PV4 as available parking positions.
- the vehicle 500 is present at the position shown in FIG.
- the image captured by the camera 201 includes the parked vehicle PV5, the parked vehicle PV6, the parked vehicle PV7, the parking space PF2, and the parked vehicle PV8.
- the available parking position acquisition unit 10 acquires the parked vehicle PV5, the parked vehicle PV6, the parked vehicle PV7, the parking space PF2, and the parked vehicle PV8 as available parking positions.
- Step S30 is also referred to as the available parking position acquisition process.
- step S40 the parking space determination unit 20 determines whether the parking possible position acquired in step S30 satisfies the parking space determination conditions.
- satisfying the parking space determination conditions means satisfying all of the following conditions A, B, C, and D. If it is determined that the parking possible position satisfies the parking space determination conditions, the control device 100 executes step S50. If it is determined that the parking possible position does not satisfy the parking space determination conditions, the control device 100 returns the process to step S10.
- Condition A A plurality of possible parking positions are continuous in the first direction from a possible parking position that is a starting point.
- Condition B A plurality of possible parking positions are continuous in the second direction from the possible parking position that is the starting point.
- Condition C A plurality of consecutive possible parking positions in the first direction are adjacent to each other at a distance equal to or less than a predetermined distance.
- Condition D A plurality of consecutive possible parking positions in the second direction are adjacent to each other at a distance equal to or less than a predetermined distance.
- condition A and condition B are the same parking possible position.
- the first direction and the second direction are directions in a horizontal plane.
- the second direction is a direction intersecting the first direction.
- Condition C means that adjacent parked vehicles PV, adjacent parking spaces PF, or adjacent parked vehicles PV and parking spaces PF in the first direction are present at a distance equal to or less than a predetermined distance.
- Condition D is similar to condition C.
- parked vehicle PV1 as the starting point
- parked vehicle PV4 is continuous in the first direction
- parked vehicles PV2, parked vehicles PV3, and parking spaces PF1 are continuous in the second direction. That is, two parking possible positions are continuous from the starting point in the first direction, and four parking possible positions are continuous from the starting point in the second direction.
- the first direction and the second direction are perpendicular to each other.
- parked vehicle PV8 is continuous in the first direction with parked vehicle PV5 as the starting point
- parked vehicle PV6, parked vehicle PV7, and parking space PF2 are continuous in the second direction. That is, two possible parking positions are continuous in the first direction from the starting point, and four possible parking positions are continuous in the second direction from the starting point.
- the parking space determination unit 20 determines, as the parking space PS, a range including a rectangle that encloses, in a top view, the parking positions that are continuous from the starting point in the first direction and the parking positions that are continuous from the starting point in the second direction.
- the parking space determination unit 20 determines, as the parking space PS, a parallelogram range having sides parallel to the first direction and sides parallel to the second direction that encloses the above-mentioned parking positions.
- the parking space determination unit 20 determines, as the parking space PS, a rectangular range that encloses parked vehicle PV1, parked vehicle PV2, parked vehicle PV3, parking frame PF1, and parked vehicle PV4, which are parking positions.
- the parking space determination unit 20 determines the range of a parallelogram surrounding the parked vehicle PV5, the parked vehicle PV6, the parked vehicle PV7, the parking space PF2, and the parked vehicle PV8, which are parking positions, as the parking space PS. It is preferable that the parking space PS is a range surrounded by the smallest parallelogram including all parking positions that satisfy the parking space determination condition.
- the parking space PS may include a range in which a parking position has not been acquired. In FIG. 4 and FIG. 5, the range in which a parking position has not been acquired is hatched with diagonal lines. The range in which a parking position has not been acquired is a range in which it is unclear whether a parked vehicle PV or a parking space PF exists.
- the parking space determination unit 20 stores the position information of the parking space PS determined in step S50 in the storage unit 102.
- the storage unit 102 stores the position information of the parking space PS from the time when the position information of each parking space PS is stored until a predetermined period has elapsed.
- Step S50 is also called the parking space determination process.
- step S60 the driving trajectory prediction unit 30 calculates the predicted driving trajectory of the vehicle 500.
- step S70 the parking lot interior determination unit 40 determines whether or not the vehicle 500 is in a parking lot based on the relative positional relationship between the vehicle 500 and the parking space PS.
- the parking lot interior determination unit 40 determines that the vehicle 500 is in a parking lot if the parking lot interior determination condition is satisfied.
- satisfying the parking lot interior determination condition means satisfying any one of the following conditions E, F, and G. If it is determined that the parking lot interior determination condition is satisfied, the control device 100 executes step S80. If it is determined that the parking lot interior determination condition is not satisfied, the control device 100 returns the process to step S10.
- Step S70 is also referred to as a parking lot interior determination step.
- Condition E The distance between the parking spaces PS on both the left and right sides of the vehicle 500 is shorter than a predetermined distance.
- Condition F The predicted arrival time of the vehicle 500 to the parking space PS is shorter than a predetermined time.
- Condition G The turning back parking conditions are met.
- condition E will be explained using FIG. 6.
- parking space PS1 is present on the left side of vehicle 500
- parking space PS2 is present on the right side of vehicle 500.
- Parking space PS1 and parking space PS2 are present at positions separated by a distance L.
- Distance L is calculated by control device 100 based on the image captured by camera 201 or the distance between vehicle 500 and parked vehicle PV detected by radar 202.
- Condition E means that distance L is shorter than a predetermined distance.
- parking lot interior determination unit 40 determines that vehicle 500 is not present in the parking lot when the distance between parking spaces PS present on both the left and right sides of vehicle 500 is longer than a predetermined distance.
- the predicted arrival time of the vehicle 500 to the parking space PS is calculated by the control device 100 using the predicted driving trajectory of the vehicle 500 predicted by the driving trajectory prediction unit 30 and the distance between the current position of the vehicle 500 and the parking space PS.
- the current position of the vehicle 500 is calculated as a relative position to the parking space PS based on the relative position of the vehicle 500 to the parking space PS when the parking space PS is determined in step S50 and the movement path of the vehicle 500 thereafter.
- the movement path of the vehicle 500 is calculated using the vehicle speed acquired by the vehicle speed sensor, the steering angle acquired by the steering angle sensor, and the like. Note that when a part of the vehicle 500 is present in the parking space PS, the predicted arrival time is the time predicted to take for the entire vehicle 500 to move into the parking space PS.
- condition G will be described with reference to FIG. 7 and FIG. 8.
- the parking space determination unit 20 determines a rectangular range surrounding the parked vehicle PV11, the parking space PF11, the parked vehicle PV12, the parking space PF12, and the parked vehicle PV13 at the left front side of the vehicle 500 as the parking space PS3. Then, assume a situation in which the driver of the vehicle 500 moves the vehicle 500 to position B and reverses the vehicle 500 to park it in the parking space PF13.
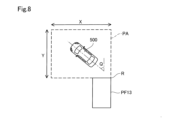
- Fig. 8 shows a state in which vehicle 500 has moved to position B in Fig. 7. Satisfying the turn back parking conditions means that the following conditions G1 and G2 are satisfied.
- Condition G1 The angle between the vehicle 500 and the parking space PF13 in which the vehicle 500 is to be parked is smaller than a predetermined angle.
- Condition G2 The vehicle 500 is present in the parking behavior area PA.
- the angle between the vehicle 500 and the parking space PF13 is the angle Q between the direction along the traveling direction of the vehicle 500 and the front-rear direction of the parking space PF13.
- the parking action area PA is a range set for the parking space PF13 where the vehicle 500 is to park.
- the parking action area PA is a range from one corner R of the parking space PF13 within a predetermined distance X in the left-right direction of the parking space PF13 and within a predetermined distance Y in the front-rear direction of the parking space PF13.
- the angle R is an angle that is close to the vehicle 500 in the front-rear direction of the parking space PF13 and far from the vehicle 500 in the left-right direction of the parking space PF13.
- step S80 of FIG. 3 the parking lot determination unit 40 determines that the vehicle 500 is in a parking lot.
- the parking lot determination process is executed as described above.
- the parking lot interior determination unit 40 determines whether or not the vehicle 500 is in the parking lot based on the relative positional relationship between the vehicle 500 and the parking space PS. Therefore, it is possible to improve the accuracy of determining whether or not the vehicle 500 is in the parking lot compared to a case where the vehicle 500 is determined to be in the parking lot using only the parked vehicle PV or the parking space PF included in the image captured in front of the vehicle 500.
- the parking space determination unit 20 determines the range of a parallelogram having sides parallel to the first direction and sides parallel to the second direction, which surrounds the parking possible positions that are continuous from the starting point in the first direction and the parking possible positions that are continuous from the starting point in the second direction, as the parking space PS. Therefore, the portion of the parking space PS that is not a parking possible position can be narrowed.
- the parking space determination unit 20 determines that a rectangular range surrounding the parking positions is a parking space PS.
- parked vehicles PV are adjacent to each other at a shorter distance than vehicles parked on a congested multi-lane road.
- the possibility of erroneously determining that the vehicle 500 is in a parking lot can be reduced.
- the parking lot interior determination unit 40 determines that the vehicle 500 is in a parking lot when the distance between the parking spaces PS on both the left and right sides of the vehicle 500 is shorter than a predetermined distance, as shown in condition E.
- the parking lot interior determination process when parking spaces PS exist on both the left and right sides of the vehicle 500 will be described with reference to FIG. 9.
- the parking space determination unit 20 determines that a rectangular range surrounding multiple parked vehicles PV and parking stalls PF that are present in the front right side of the vehicle 500 is a parking space PS4.
- the parking space PS4 includes a range RG1 in which a parking possible position has not been acquired.
- the parking space determination unit 20 determines that a rectangular range surrounding multiple parked vehicles PV and parking stalls PF that are present in the front right side of the vehicle 500 is a parking space PS5. Thereafter, when the vehicle 500 turns right and moves to position E, there is a parking space PS4 on the right side of the vehicle 500, and a parking space PS5 on the left side of the vehicle 500. That is, there are parking spaces PS on both the left and right sides of the vehicle 500. At this time, if the distance between the parking space PS4 and the parking space PS5 is equal to or less than a predetermined distance, the parking lot interior determination unit 40 determines that the vehicle 500 is in the parking lot.
- the parking lot interior determination unit 40 determines that the vehicle 500 is in the parking lot if the predicted arrival time of the vehicle 500 to the parking space PS is shorter than a predetermined time. Therefore, the accuracy of determining whether the vehicle 500 is in the parking lot can be improved compared to when determining whether the vehicle 500 is in the parking lot using only the parked vehicle PV or parking space PF included in the image captured in front of the vehicle 500.
- the parking lot interior determination unit 40 determines that the vehicle 500 is in the parking lot when the angle between the vehicle 500 and the parking space PF is smaller than a predetermined angle and the vehicle 500 is in the parking behavior area PA.
- the vehicle 500 attempts to park in a parking space PF located behind the vehicle 500 in the parking lot, there may be no parked vehicle PV or parking space PF in front of the vehicle 500.
- condition G it can be determined that the vehicle 500 is in the parking lot even if there is no parked vehicle PV or parking space PF in front of the vehicle 500. This improves the accuracy of determining whether the vehicle 500 is in the parking lot.
- the control device 100b determines whether the vehicle 500 is in a parking lot, and suppresses the driving force of the vehicle 500 when the acceleration operation device is erroneously operated while the vehicle 500 is in the parking lot. As shown in FIG. 10, the control device 100b is communicably connected to the driving device 211, the steering device 212, and the braking device 213 mounted on the vehicle 500.
- the CPU 101 also functions as an operation amount acquisition unit 50 and a driving force suppression unit 60 by executing a program stored in the storage unit 102.
- the other configurations of the control device 100b in the second embodiment are similar to those of the control device 100 in the first embodiment.
- the drive unit 211 generates a drive force that is transmitted to the drive wheels of the vehicle 500.
- the drive unit 211 is, for example, an electric motor or an engine.
- the steering device 212 applies a steering force to the wheels of the vehicle 500.
- the steering device 212 is, for example, an electric power steering device.
- the braking device 213 applies a braking force to the wheels of the vehicle 500.
- the braking device 213 is, for example, a brake.
- the operation amount acquisition unit 50 acquires the operation amount of the acceleration operation device.
- the acceleration operation device is, for example, an accelerator, and the operation amount of the acceleration operation device is, for example, the amount of depression of the accelerator.
- the operation amount acquisition unit 50 acquires, for example, the amount of depression of the accelerator detected by an accelerator sensor included in the driving condition sensor 203.
- the driving force suppression unit 60 suppresses the driving force of the vehicle 500 when it is determined that the vehicle 500 is in a parking lot and the amount of operation of the acceleration operation device is equal to or greater than a predetermined threshold value.
- step S110 the parking lot determination process shown in FIG. 3 is executed. Therefore, steps S120 to S150 are executed when it is determined that the vehicle 500 is in a parking lot.
- step S120 the operation amount acquisition unit 50 acquires the operation amount of the acceleration operation device.
- step S130 the control device 100b determines whether or not the driver of the vehicle 500 has erroneously operated the acceleration operation device.
- the driver of the vehicle 500 erroneously operates the acceleration operation device means, for example, that the driver of the vehicle 500 steps on the accelerator in mistake instead of the brake.
- the control device 100b determines that the driver has erroneously operated the acceleration operation device when all of the following conditions H to L are satisfied. If it is determined that the driver has erroneously operated the acceleration operation device, the control device 100b executes step S140. If it is determined that the driver has not erroneously operated the acceleration operation device, the control device 100b ends the driving force suppression process.
- Condition H The speed of the vehicle 500 is lower than a predetermined speed.
- Condition I The amount of operation of the acceleration operating device is equal to or greater than a predetermined threshold value.
- Condition J The operating speed of the acceleration operating device is equal to or greater than a predetermined operating speed.
- Condition K No braking operation is performed.
- Condition L The turn signal is not operated.
- Condition H is determined based on the vehicle speed detected by the vehicle speed sensor included in the driving condition sensor 203.
- Condition I is determined based on the amount of accelerator depression detected by the accelerator sensor.
- Condition J is determined based on the value obtained by dividing the amount of accelerator depression by time.
- Condition K is determined based on the detection result of the brake sensor included in the driving condition sensor 203.
- Condition L is determined based on the detection result of the turn signal switch included in the driving condition sensor 203.
- step S140 the driving force suppression unit 60 suppresses the driving force of the vehicle 500.
- the driving force suppression unit 60 controls the operation of the drive device 211 so that the acceleration of the vehicle 500 is equal to or lower than a predetermined value.
- step S150 the control device 100b determines whether the amount of operation of the acceleration operation device has decreased to a predetermined threshold or less.
- the control device 100b determines, for example, whether the amount of accelerator depression detected by an accelerator sensor has decreased to a predetermined threshold or less. If it is determined that the amount of operation of the acceleration operation device has decreased to a predetermined threshold or less, the control device 100b ends the driving force suppression process. If it is determined that the amount of operation of the acceleration operation device has not decreased to a predetermined threshold or less, the control device 100b returns the process to step S140.
- the driving force suppression process is executed as described above.
- the driving force suppression unit 60 suppresses the driving force of the vehicle 500 when it is determined that the driver of the vehicle 500 has mistakenly operated the acceleration operation device while the vehicle 500 is in a parking lot. Therefore, even if the driver of the vehicle 500 mistakenly presses the accelerator instead of the brake while the vehicle 500 is in a parking lot, it is possible to suppress sudden acceleration of the vehicle 500.
- condition A is to satisfy all of condition A, condition B, condition C, and condition D.
- the parking space determination condition may be to satisfy all of condition A, condition B, condition C, condition D, and condition M described later.
- Condition M There are fewer than a predetermined number of consecutive possible parking positions in a first direction, which is the front-to-rear direction of the possible parking positions.
- the forward/backward direction of the parking position in condition M is the direction along which the parked vehicle PV moves when the parked vehicle PV moves forward or backward, or the longitudinal direction of the parking space PF.
- Figures 4 and 5 show an example in which two parking positions are adjacent to each other in the first direction, which is the forward/backward direction of the parking position.
- the parking space determination unit 20 determines that a rectangular area surrounding the parking positions in a top view is a parking space PS when there are fewer than a predetermined number of parking positions consecutively in a first direction, which is the fore-aft direction of the parking positions.
- a predetermined number of parking positions consecutively in a first direction which is the fore-aft direction of the parking positions.
- the positions of multiple parked vehicles are the same as when many parked vehicles PV are consecutively positioned in the fore-aft direction.
- the parking space determination condition is to satisfy all of condition A, condition B, condition C, and condition D.
- the parking space determination condition may be to satisfy all of condition A, condition B, condition C, condition D, and condition N described below.
- the predetermined number in condition N is an integer of 3 or more.
- Condition N There are more than a predetermined number of available parking positions in succession to the left and right of the available parking positions.
- the left-right direction of a parking position in condition N is the direction perpendicular to the front-rear direction of the parking position in a horizontal plane.
- Figure 4 shows an example in which four parking positions are consecutive in the second direction, which is the left-right direction of the parking positions.
- the parking space determination unit 20 determines that a rectangular area surrounding the parking positions in a top view is a parking space PS.
- the positions of multiple vehicles stopped to wait for a traffic light are the same as when many parked vehicles PV are consecutively positioned in the left-right direction.
- the parking space determination condition is to satisfy all of condition A, condition B, condition C, and condition D.
- the parking space determination condition may be to satisfy all of condition A, condition B, condition C, condition D, and condition O described below.
- the angle in condition O is the angle between straight lines along the front-rear direction of each possible parking position.
- Condition O Multiple possible parking locations are adjacent to each other at an angle equal to or less than a predetermined angle.
- the parking space determination condition is to satisfy all of conditions A, B, C, and D.
- the parking space determination condition may be to satisfy at least conditions A and B among conditions A, B, C, and D.
- the parking space determination unit 20 determines the range of a parallelogram having sides parallel to the first direction and sides parallel to the second direction, which surrounds the parking positions continuing from the starting point in the first direction and the parking positions continuing from the starting point in the second direction, as the parking space PS.
- the parking space determination unit 20 may determine the range including a rectangle surrounding the parking positions continuing from the starting point in the first direction and the parking positions continuing from the starting point in the second direction, as the parking space PS.
- the parking space determination unit 20 may determine the range of an ellipse including a rectangle T surrounding two parking positions continuing in the first direction and two parking positions continuing in the second direction, as the parking space PS.
- the parking space determination unit 20 may determine the range of a polygon including a rectangle T, or the range surrounded by a curve surrounding a rectangle T, as the parking space PS, instead of an ellipse.
- step S130 of the driving force suppression process shown in FIG. 11 the control device 100b determines that the driver has erroneously operated the acceleration operating device if all of conditions H to L are met. In contrast, the control device 100b may determine that the driver has erroneously operated the acceleration operating device if at least condition I is met.
- the parking space PF is a parking space defined by a rectangle drawn on the road surface.
- the parking space PF may be a parking space defined by two parallel straight lines drawn on the road surface.
- the parking space PF is not limited to a parking space defined by lines drawn on the road surface, but may be a parking space defined by objects such as road cones or blocks placed on the road surface.
- control device 100 and the methods described herein may be realized by a dedicated computer provided by configuring a processor and memory programmed to execute one or more functions embodied in a computer program.
- control device 100 and the methods described herein may be realized by a dedicated computer provided by configuring a processor with one or more dedicated hardware logic circuits.
- control device 100 and the methods described herein may be realized by one or more dedicated computers configured by combining a processor and memory programmed to execute one or more functions with a processor configured with one or more hardware logic circuits.
- the computer program may be stored in a computer-readable non-transient tangible recording medium as instructions executed by the computer.
- the present disclosure is not limited to the above-described embodiments, and can be realized in various configurations without departing from the spirit of the disclosure.
- the technical features in the embodiments corresponding to the technical features in each form described in the Summary of the Invention column can be replaced or combined as appropriate to solve some or all of the above-described problems or to achieve some or all of the above-described effects.
- a technical feature is not described in this specification as essential, it can be deleted as appropriate.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025527987A JPWO2024262409A1 (https=) | 2023-06-21 | 2024-06-13 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023101386 | 2023-06-21 | ||
| JP2023-101386 | 2023-06-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024262409A1 true WO2024262409A1 (ja) | 2024-12-26 |
Family
ID=93935343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/021531 Ceased WO2024262409A1 (ja) | 2023-06-21 | 2024-06-13 | 制御装置及び駐車場判定方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2024262409A1 (https=) |
| WO (1) | WO2024262409A1 (https=) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017187592A1 (ja) * | 2016-04-28 | 2017-11-02 | 日産自動車株式会社 | 駐車支援方法および装置 |
| WO2022024547A1 (ja) * | 2020-07-28 | 2022-02-03 | 株式会社デンソー | 駐車場特定システム、駐車場特定方法、制御装置、センタ装置、および駐車エリア特定方法 |
| CN115311892A (zh) * | 2022-08-05 | 2022-11-08 | 合众新能源汽车有限公司 | 车位显示方法、装置和电子设备 |
| JP2023154553A (ja) * | 2022-04-07 | 2023-10-20 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法及び、プログラム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11105686A (ja) * | 1997-10-07 | 1999-04-20 | Nissan Motor Co Ltd | 自動駐車装置 |
| JP5443886B2 (ja) * | 2009-07-31 | 2014-03-19 | クラリオン株式会社 | 駐車空間認識装置 |
-
2024
- 2024-06-13 JP JP2025527987A patent/JPWO2024262409A1/ja active Pending
- 2024-06-13 WO PCT/JP2024/021531 patent/WO2024262409A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017187592A1 (ja) * | 2016-04-28 | 2017-11-02 | 日産自動車株式会社 | 駐車支援方法および装置 |
| WO2022024547A1 (ja) * | 2020-07-28 | 2022-02-03 | 株式会社デンソー | 駐車場特定システム、駐車場特定方法、制御装置、センタ装置、および駐車エリア特定方法 |
| JP2023154553A (ja) * | 2022-04-07 | 2023-10-20 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法及び、プログラム |
| CN115311892A (zh) * | 2022-08-05 | 2022-11-08 | 合众新能源汽车有限公司 | 车位显示方法、装置和电子设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024262409A1 (https=) | 2024-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111372826B (zh) | 车辆的制动辅助装置、控制装置以及制动辅助方法 | |
| JP5981332B2 (ja) | 走行経路生成装置 | |
| JP6152673B2 (ja) | 車線変更支援装置 | |
| US9809251B2 (en) | Lane following control device | |
| JP7194640B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| US10747219B2 (en) | Processing apparatus, vehicle, processing method, and storage medium | |
| US10657392B2 (en) | Object detection device, object detection method, and program | |
| US11634139B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| WO2021233154A1 (zh) | 可行驶区域检测方法、装置、设备及存储介质 | |
| JP2011253302A (ja) | 車両用危険度算出装置 | |
| US11977147B2 (en) | Apparatus for assisting driving and method thereof | |
| JP2014051241A (ja) | 車両制御装置 | |
| US20240109412A1 (en) | Driving assistance apparatus, driving assistance method, and program | |
| WO2018110196A1 (ja) | 車両制御装置、車両制御方法 | |
| US20260048756A1 (en) | Driving assistance apparatus, driving assistance method, and program | |
| JP5915441B2 (ja) | 車両制御装置 | |
| JP7615068B2 (ja) | 車両制御装置 | |
| WO2024262409A1 (ja) | 制御装置及び駐車場判定方法 | |
| US20190026569A1 (en) | Image processing device, image processing method, computer-readable recording medium, object recognition device, device control system, and movable body | |
| CN115092182A (zh) | 一种车辆意图预测方法、系统、电子设备及介质 | |
| JP7324819B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| CN118082829A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| US20250308255A1 (en) | Control device and method for determining parking space | |
| WO2024262242A1 (ja) | 車両制御装置、車両制御方法およびコンピュータプログラム | |
| JP2025001745A (ja) | 制御装置及び駐車場判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24825813 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025527987 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025527987 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |