WO2024142828A1 - 回転動作運動評価方法及びシステム並びにプログラム - Google Patents
回転動作運動評価方法及びシステム並びにプログラム Download PDFInfo
- Publication number
- WO2024142828A1 WO2024142828A1 PCT/JP2023/043821 JP2023043821W WO2024142828A1 WO 2024142828 A1 WO2024142828 A1 WO 2024142828A1 JP 2023043821 W JP2023043821 W JP 2023043821W WO 2024142828 A1 WO2024142828 A1 WO 2024142828A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- coordinate system
- data
- coordinate data
- rotational
- center
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
- A63B24/0006—Computerised comparison for qualitative assessment of motion sequences or the course of a movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
- A61B5/1122—Determining geometric values, e.g. centre of rotation or angular range of movement of movement trajectories
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1126—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb using a particular sensing technique
- A61B5/1128—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb using a particular sensing technique using image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
- A63B2024/0068—Comparison to target or threshold, previous performance or not real time comparison to other individuals
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2102/00—Application of clubs, bats, rackets or the like to the sporting activity ; particular sports involving the use of balls and clubs, bats, rackets, or the like
- A63B2102/18—Baseball, rounders or similar games
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
Definitions
- the present invention relates to a method for evaluating exercise involving rotational motion, and more particularly to a method, system, and program for evaluating rotational motion involving rotational motion with an acceleration of 9.8 m/sec 2 or more.
- Patent Document 1 discloses a body movement analysis and visualization device.
- the three-dimensional movement measurement means generates time-series data of three-dimensional coordinate values of feature points of the body, etc. in three-dimensional space, i.e., movement data," it uses three-dimensional coordinate values of multiple predefined feature points in the human body, i.e., multiple individual, independent, fixed local coordinates (see Figure 7 in Patent Document 1). Then, optimization processing of each part is performed using a human body simulation.
- Patent Document 1 when multiple independent fixed local coordinates within the human body are used to perform optimization processing for each part in a human body simulation, this is excellent for evaluating the performance of the human body's movements as viewed from these multiple fixed local coordinates (for example, whether the pitching motion maximizes the ball's exit velocity), but it is not possible to evaluate it from the perspective of the load on the body.
- body movement is considered as a rigid model, so it is not possible to evaluate it from the perspective of the load on the body.
- JP 10-149445 A Patent Publication 2022-155115 Patent Publication 2010-14712
- the present invention aims to provide a rotational movement evaluation method , system, and program that can visualize and evaluate the physical load on the joints of the body, performance, etc. by relatively comparing the rotational coordinate system coordinate data of one's own rotational movement with the world coordinate system data of one's own rotational movement in a movement involving a rotational movement with an acceleration of 9.8 m/sec2 or more.
- the rotational movement motion evaluation method of the present invention is a rotational movement motion evaluation method that estimates and evaluates performance and/or physical load in exercise involving rotational movements with an acceleration of more than 9.8 m/ sec2 , and includes a rotational center definition step of defining a rotational center from at least one real rotation center and/or ideal rotation center obtained from a group of actual movements, rotational movements by skeletal estimation and motion capture, a step of obtaining world coordinate system coordinate data that is coordinate data of the world coordinate system in the rotational movement from the defined rotation center, a step of converting the world coordinate system coordinate data into rotating coordinate system local coordinate data that is local coordinate data of a rotating coordinate system with the rotational center within the human body as the origin in the rotational movement, and an evaluation step of relatively comparing and evaluating the values of two data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data of a predetermined position within the human body obtained from the same movement in the rotational movement.
- Figure 7 shows a diagram in which the spine of a person using his left arm to pitch a baseball towards us as a rotational motion is represented as a straight line NW, and the straight lines connecting the left shoulder LS and right shoulder RS of the person making the rotational motion, that is, the straight lines R1 and L1 connecting the left shoulder and right shoulder, are represented as straight lines LS and RS.
- a rotation center coordinate point C ( xc , yc , zc ) is found on the straight line NW shown in FIG. 7 and has the shortest distance from the straight lines LS and RS.
- the ideal rotation center coordinate point Ci shown in FIG. It is defined as:
- Rotation center coincidence rate (1) [Rate of coincidence between the center of rotation at maximum speed and the center of rotation at each time of rotational movement]
- the rotation center coincidence rate as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion, can be used to evaluate the performance of rotational motion (for example, pitching motion in baseball). By looking at this rotation center coincidence rate, it can be used to determine whether the body is shaking at the final acceleration of the rotational motion (for example, when the ball is released). If the center of rotation is shaking, energy is also used in the translational motion, which is thought to reduce efficiency.
- the motion mechanics of the pitcher's torso can be evaluated as being in the best state for rotational motion. Note that, if it is necessary to analyze a motion without information data on the spine, it is not possible to evaluate the efficiency of the mechanics by looking at the agreement rate between the ideal center of rotation and the real center of rotation. This is because the ideal rotation coordinates are substituted for the central coordinates of each data.
- information on the skeletal estimation during the rotation movements can be input using an application that performs skeletal estimation from a captured image of the actual movements.
- information on the motion capture during the rotation movements can be input using an application that performs motion capture from a captured image of the actual movements.
- the real center of rotation can be obtained from a group of actual movements, skeletal estimation, and rotational movements obtained by motion capture.
- the real center of rotation can be calculated from at least one of these groups, or can be automatically detected from at least one of these groups. Note that the real center of rotation can be obtained by combining any of these groups, for example, actual photographed images and skeletal estimation.
- Such information is input from the information input operation unit 24.
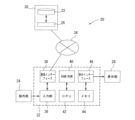
- the display unit 28 Based on the input information, the display unit 28 outputs the rotational movement exercise evaluation. All of this input to output can be done by a program. When using a program to do everything on the system, the only user information to be input is the ID (name, height, registration number, etc.), All of the steps from capturing the rotational motion ⁇ outputting a world coordinate system data group ⁇ detecting the center of rotation ⁇ converting to a rotational coordinate system ⁇ verification can be done automatically. Also, if the rotational motion is the motion of throwing a baseball, it is also possible to automatically define left-handed or right-handed throwing by detecting the direction in which the ball is thrown.
- a camera is set in the information input operation unit 24, then by inputting user information from the information input operation unit 24 and inputting an image from the information input operation unit 24, all of the steps from input to output of evaluation can be done automatically on the system.
- a rotational movement evaluation system 20 is shown, but with a similar configuration, by simply changing the program, it can also be made into a coordinate data conversion system for rotational movement that performs conversion of coordinate data in rotational movement.
- the second aspect of the program of the present invention is a program for making a computer function as each device in a coordinate data conversion system. That is, the second aspect of the program of the present invention makes a computer function as each device in a coordinate data conversion system in a rotational motion, including a rotational center definition device that defines a rotational center from at least one real rotational center and/or ideal rotational center obtained from a group of actual motion, skeletal estimation, and rotational motion by motion capture, a world coordinate system coordinate data acquisition device that obtains world coordinate system coordinate data, which is coordinate data of the world coordinate system that indicates the world coordinates of a predetermined position in the human body in the rotational motion for each time from the defined rotational center, a device that defines the center coordinate of the world coordinate system coordinate data for each time, a device that obtains orthogonal coordinate system data by matching one axis of an orthogonal coordinate system with a line segment connecting the center coordinate and a predetermined joint position, and a conversion device that converts the orthogonal coordinate system data into local coordinate
- the terminal device 32 and the server 30 are connected via the communication network 34, but it is also possible to input all programs into the terminal device 32 without using the communication network 34 and have the terminal device 32 function offline as a rotational motion evaluation system, or as a coordinate data conversion system.
- FIG. 16 shows a flowchart illustrating one embodiment of the rotational movement evaluation method in the rotational movement evaluation system 20 of the present invention.
- FIG. 16 shows a pattern in which a rotation center is defined from an actual rotation center using skeletal estimation.
- the computer processing is broadly divided into three parts: a part in which skeletal estimation is performed in the rotational movement evaluation system 20, an analysis part in which analysis is performed in the rotational movement evaluation system 20, and a display part in which the evaluation of the rotational movement is displayed in the rotational movement evaluation system 20.
- S108a ⁇ Body frame image insertion step> A body frame image is inserted.
- S107 body frame definition file reference step.
- the bone structure estimation video is displayed for reference.
- the next step includes a step of converting coordinate data from the world coordinate system to a rotating coordinate system, which is a characteristic step of the present invention.
- S108b ⁇ Three-dimensional coordinate-time data acquisition step [world coordinate system]> Time-based data of three-dimensional coordinates in the world coordinate system is acquired.
- S112 ⁇ Rotation center coordinate calculation step> The rotation center coordinate is calculated from the three-dimensional coordinate data in S108b.
- the rotation center coordinate calculation object skeleton definition file in the database is referenced in S111 (S111: rotation center coordinate calculation object skeleton definition file reference step).
- S114 ⁇ 3D coordinates/rotation center coordinates-time data acquisition step [world coordinate system]> Three-dimensional coordinate data in the world coordinate system is acquired for each time period.
- S116a ⁇ Unit Vector Calculation Step (During Rotation--Target Joint)> A unit vector of a joint that is an evaluation target during a rotational motion is calculated.
- S125 ⁇ Step for evaluating relative joint position (straight line matching rate) [rotating coordinate system]> The relative joint position (straight line matching rate) of the joint part to be evaluated in the rotating coordinate system is evaluated and displayed. This step can be provided as necessary. For example, in terms of the rotational motion of pitching, the linear matching rate between the line R1 from the spine to the right shoulder and the line L1 from the spine to the left shoulder shown in FIG. 7 can be evaluated, or the linear matching rate between the line R1 from the spine to the right shoulder and the line LA from the spine to the left arm can be evaluated. It can be evaluated that the higher the linear matching rate, the closer the rotational motion is to the ideal.
- S126 ⁇ Step of Drawing a Speed-Time Graph [Rotating Coordinate System]> A graph showing the speed of the joint part to be evaluated in the rotating coordinate system over time is drawn and displayed.
- S131 ⁇ Rotation center coordinate agreement rate [world coordinate system]> The agreement rate between the rotation center coordinates in the world coordinate system of the joint part to be evaluated and the ideal rotation center coordinates is evaluated and displayed. This step may be provided as necessary.
- the obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated.
- S135: ⁇ Relative comparison evaluation step> The obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated.
- this relative comparison for example, a graph showing the velocity in the rotating coordinate system of a predetermined position in the human body that is the evaluation target of S126, such as a joint, over time, is compared and evaluated with a graph showing the velocity in the world coordinate system of the joint that is the evaluation target of S132 over time.
- a maximum acceleration of a graph showing the acceleration in the rotating coordinate system of the joint part, which is the evaluation target of S127, for each time is relatively compared with a maximum acceleration of a graph showing the acceleration in the world coordinate system of a predetermined position in the human body, for example, a joint, which is the evaluation target of S133, for each time, and if the maximum acceleration in the rotating coordinate system is close to or greater than the maximum acceleration in the world coordinate system, it can be determined that the load on the joint part is large.
- a relative comparison is made between the areas of the graphs of the speeds shown for each time of the rotating coordinate system and the world coordinate system of a predetermined position in the human body, and if the area of the graph of the speeds shown for each time of the rotating coordinate system is close to or greater than the area of the graph of the speeds shown for each time of the world coordinate system, it can be determined that the load on the predetermined position in the human body, for example, a joint part, is large.
- the present invention is characterized by the fact that it does not compare data with that of others, but with one's own data. Therefore, although physical loads such as the load on joints caused by rotational movements vary from person to person, by comparing with one's own data, it is now possible to visualize, i.e., quantify, and evaluate physical loads, which was not possible before. Furthermore, in addition to evaluating physical loads such as the load on joints caused by rotational movements, the rotational movement motion evaluation system and rotational movement motion evaluation method of the present invention can also evaluate performance due to rotational movements by relatively comparing the data in the rotational coordinate system with the data in the world coordinate system.
- the center of rotation may be at least one real center of rotation obtained from the group of actual movements, skeletal estimation, and rotation movements by motion capture, and/or an ideal center of rotation may be used.
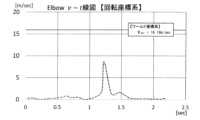
- Example 1 A left-handed pitcher A was actually asked to throw a baseball with his left arm, and a video of the left arm pitching was taken. The center of rotation was calculated based on skeletal estimation from the video. Then, the speed of the elbow in the left arm pitching motion was calculated for each time in the world coordinate system and the local rotating coordinate system.
- FIG. 17 shows a graph of the results in the world coordinate system. The maximum speed Vmax in the world coordinate system was 16.19 m/sec.
- FIG. 18 shows a graph of the results of the speed per time in the rotating coordinate system.
- the speed per time in the rotating coordinate system was 8.67 m/sec, even at the maximum speed Vmax, which is much slower than the maximum speed Vmax of the world coordinate system of 16.19 m/sec (53.55% when the maximum speed in the world coordinate system is 100%), and it can be determined that the load on the elbow in the left arm pitching motion is small. There is little possibility of injury even if such a pitching motion is continued.
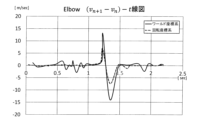
- 19 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relative to each other for the left arm's pitching motion.
- Example 2 Next, the center of rotation was calculated based on the skeleton estimation from a recorded video of right-handed pitcher B throwing a baseball with his right arm. Then, the velocity of the elbow in the pitching motion of the right arm was calculated for each time in the world coordinate system and the local rotating coordinate system.
- FIG. 21 shows a graph of the results in the world coordinate system. The maximum velocity Vmax in the world coordinate system was 16.21 m/sec.
- FIG. 22 shows a graph of the results of the velocity per time in the rotating coordinate system. In a relative comparison, the maximum velocity Vmax per time in the rotating coordinate system reached a value close to the Vmax of the world coordinate system of 16.21 m/sec, which was 16.03 m/sec (98.89% when the maximum velocity in the world coordinate system is 100%).
- the pitching motion places a large load on the elbow.
- 23 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relatively for the right arm during the pitching motion.
- the maximum acceleration in the rotating coordinate system exceeds the maximum acceleration in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is the joint in question.
- 24 shows the results of calculating and relatively comparing the displacement of the elbow in the world coordinate system and the local rotating coordinate system in relation to the elbow during the pitching motion of the right arm.
- the displacement of the elbow in the rotating coordinate system exceeds the displacement of the elbow in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is a joint part.
- the movement involving a rotational motion in sports using flying objects or sliding objects such as baseball, softball, soccer, tennis, golf, volleyball, basketball, cricket, hockey, rugby, American football, handball, water polo, bowling, lacrosse, table tennis, squash, badminton, ice hockey, etc.
- any movement involving a rotational motion such as dance or figure skating, etc.
- the movement involving a rotational motion of the present invention is included.
- any movement involving a rotational motion other than the above listed movements is included.
- the center of rotation of the body during the movement is somewhere on the spine, but in rotational movements in other sports, such as kicking a ball in soccer, the center of rotation is at the hip joint, etc.
- the center of rotation within the human body during movements involving rotational movements in this invention will differ depending on the type of movement, but the center of rotation within the human body can be defined according to the type of movement.
- the rotational coordinate system coordinate data of one's own rotational movement can be relatively compared with the world coordinate system data of one's own rotational movement, thereby visualizing and evaluating the physical load acting on the joints of the body, performance, etc.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Physiology (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geometry (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Physical Education & Sports Medicine (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020257021720A KR20250130310A (ko) | 2022-12-28 | 2023-12-07 | 회전 동작 운동 평가 방법, 시스템 및 프로그램 |
| US19/116,779 US20260102655A1 (en) | 2022-12-28 | 2023-12-07 | Rotating action motion assessment method, system, and program |
| JP2024562236A JP7607894B2 (ja) | 2022-12-28 | 2023-12-07 | 回転動作運動評価方法及びシステム並びにプログラム |
| MX2025007476A MX2025007476A (es) | 2022-12-28 | 2025-06-25 | Metodo, sistema y medio legible por computadora no transitorio para evaluacion de movimiento de accion de rotacion |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022212108 | 2022-12-28 | ||
| JP2022-212108 | 2022-12-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024142828A1 true WO2024142828A1 (ja) | 2024-07-04 |
Family
ID=91717265
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/043821 Ceased WO2024142828A1 (ja) | 2022-12-28 | 2023-12-07 | 回転動作運動評価方法及びシステム並びにプログラム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20260102655A1 (https=) |
| JP (1) | JP7607894B2 (https=) |
| KR (1) | KR20250130310A (https=) |
| MX (1) | MX2025007476A (https=) |
| TW (1) | TWI905605B (https=) |
| WO (1) | WO2024142828A1 (https=) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010014712A (ja) * | 2008-06-30 | 2010-01-21 | Samsung Electronics Co Ltd | モーションキャプチャー装置及びモーションキャプチャー方法 |
| JP2013138742A (ja) * | 2011-12-29 | 2013-07-18 | Dunlop Sports Co Ltd | ゴルフスイングの診断方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5935779B2 (ja) * | 2013-09-30 | 2016-06-15 | カシオ計算機株式会社 | 画像処理装置、画像処理方法及びプログラム |
| KR101703858B1 (ko) * | 2015-08-12 | 2017-02-22 | 주식회사 골프존 | 골프스윙영상 정보 제공 시스템, 골프스윙영상 정보 제공을 위한 카메라 장치 및 골프스윙영상 정보 제공방법 |
-
2023
- 2023-12-07 US US19/116,779 patent/US20260102655A1/en active Pending
- 2023-12-07 KR KR1020257021720A patent/KR20250130310A/ko active Pending
- 2023-12-07 WO PCT/JP2023/043821 patent/WO2024142828A1/ja not_active Ceased
- 2023-12-07 JP JP2024562236A patent/JP7607894B2/ja active Active
- 2023-12-25 TW TW112150572A patent/TWI905605B/zh active
-
2025
- 2025-06-25 MX MX2025007476A patent/MX2025007476A/es unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010014712A (ja) * | 2008-06-30 | 2010-01-21 | Samsung Electronics Co Ltd | モーションキャプチャー装置及びモーションキャプチャー方法 |
| JP2013138742A (ja) * | 2011-12-29 | 2013-07-18 | Dunlop Sports Co Ltd | ゴルフスイングの診断方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024142828A1 (https=) | 2024-07-04 |
| KR20250130310A (ko) | 2025-09-01 |
| US20260102655A1 (en) | 2026-04-16 |
| MX2025007476A (es) | 2025-07-01 |
| TWI905605B (zh) | 2025-11-21 |
| JP7607894B2 (ja) | 2025-01-06 |
| TW202444309A (zh) | 2024-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12260678B2 (en) | Detection of kinetic events and mechanical variables from uncalibrated video | |
| US11833406B2 (en) | Swing quality measurement system | |
| US12168168B2 (en) | Equipment fitting system that compares swing metrics | |
| US10456653B2 (en) | Swing quality measurement system | |
| US8175326B2 (en) | Automated scoring system for athletics | |
| KR100772497B1 (ko) | 골프 클리닉 시스템 및 그것의 운용방법 | |
| US11977095B2 (en) | Method and system for analyzing an athletic throwing motion by an individual | |
| Chun et al. | A sensor-aided self coaching model for uncocking improvement in golf swing | |
| US11577142B2 (en) | Swing analysis system that calculates a rotational profile | |
| Kaichi et al. | Estimation of center of mass for sports scene using weighted visual hull | |
| JP7607894B2 (ja) | 回転動作運動評価方法及びシステム並びにプログラム | |
| US20230126755A1 (en) | Information processing apparatus, information processing method, and imaging system | |
| Kaichi et al. | Image-based center of mass estimation of the human body via 3D shape and kinematic structure | |
| JP7851194B2 (ja) | 情報処理装置、情報処理方法、記憶媒体及びプログラム | |
| Musha et al. | Reliability and validity of a deep learning algorithm based markerless motion capture system in measuring squats | |
| WO2024057305A1 (en) | Kinematic analysis of events during playing of sports including feedback display | |
| Khan et al. | Weight training analysis of sportsmen with kinect bioinformatics for form improvement | |
| TWI805124B (zh) | 棒球投手疲勞分析與運動傷害診斷之虛擬實境系統 | |
| Liu et al. | A low-cost virtual coach for diagnosis and guidance in baseball/softball batting training | |
| Aihara et al. | Development of Monocular Vision-Based Tracking Method for Wheelchair Sports. | |
| Okubo et al. | Comparative Time-Series Analysis of Hip and Shoulder Rotation in Baseball Bat Swings | |
| Haq et al. | 3-D Motion Analysis Of The Upper Body Of Cricket Batsman At The Execution Pull Shot | |
| Skublewska-Paszkowska | Motion Repeatability of Tennis Forehand Preparation Phase Without the Ball Using Three Dimensional Data | |
| Martinez et al. | Effect of Lower Extremities Position on Volleyball Attack Take-off Height | |
| CN121545214A (zh) | 基于类点位浮差分析的运动员训练动作数据标准化方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23911609 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024562236 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 23911609 Country of ref document: EP Kind code of ref document: A1 |