WO2024142828A1 - Rotating action motion assessment method, system, and program - Google Patents
Rotating action motion assessment method, system, and program Download PDFInfo
- Publication number
- WO2024142828A1 WO2024142828A1 PCT/JP2023/043821 JP2023043821W WO2024142828A1 WO 2024142828 A1 WO2024142828 A1 WO 2024142828A1 JP 2023043821 W JP2023043821 W JP 2023043821W WO 2024142828 A1 WO2024142828 A1 WO 2024142828A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- coordinate system
- data
- coordinate data
- rotational
- center
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 26
- 230000009471 action Effects 0.000 title abstract description 10
- 230000001133 acceleration Effects 0.000 claims abstract description 49
- 238000011156 evaluation Methods 0.000 claims description 73
- 238000006243 chemical reaction Methods 0.000 claims description 26
- 238000006073 displacement reaction Methods 0.000 claims description 17
- 230000008569 process Effects 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 14
- 210000001503 joint Anatomy 0.000 description 13
- 239000013598 vector Substances 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 9
- 230000009466 transformation Effects 0.000 description 9
- 238000004458 analytical method Methods 0.000 description 8
- 210000000988 bone and bone Anatomy 0.000 description 7
- 238000004891 communication Methods 0.000 description 7
- 230000006378 damage Effects 0.000 description 7
- 208000027418 Wounds and injury Diseases 0.000 description 6
- 208000014674 injury Diseases 0.000 description 6
- 239000011295 pitch Substances 0.000 description 5
- 238000005259 measurement Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 210000003041 ligament Anatomy 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 235000009854 Cucurbita moschata Nutrition 0.000 description 1
- 240000001980 Cucurbita pepo Species 0.000 description 1
- 235000009852 Cucurbita pepo Nutrition 0.000 description 1
- 206010060820 Joint injury Diseases 0.000 description 1
- 208000018286 Shoulder injury Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000386 athletic effect Effects 0.000 description 1
- 210000000845 cartilage Anatomy 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000013075 data extraction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000009189 diving Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000001624 hip Anatomy 0.000 description 1
- 210000004394 hip joint Anatomy 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 235000020354 squash Nutrition 0.000 description 1
- 230000009182 swimming Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
Definitions
- the present invention relates to a method for evaluating exercise involving rotational motion, and more particularly to a method, system, and program for evaluating rotational motion involving rotational motion with an acceleration of 9.8 m/sec 2 or more.
- Patent Document 1 discloses a body movement analysis and visualization device.
- the three-dimensional movement measurement means generates time-series data of three-dimensional coordinate values of feature points of the body, etc. in three-dimensional space, i.e., movement data," it uses three-dimensional coordinate values of multiple predefined feature points in the human body, i.e., multiple individual, independent, fixed local coordinates (see Figure 7 in Patent Document 1). Then, optimization processing of each part is performed using a human body simulation.
- Patent Document 1 when multiple independent fixed local coordinates within the human body are used to perform optimization processing for each part in a human body simulation, this is excellent for evaluating the performance of the human body's movements as viewed from these multiple fixed local coordinates (for example, whether the pitching motion maximizes the ball's exit velocity), but it is not possible to evaluate it from the perspective of the load on the body.
- body movement is considered as a rigid model, so it is not possible to evaluate it from the perspective of the load on the body.
- JP 10-149445 A Patent Publication 2022-155115 Patent Publication 2010-14712
- the present invention aims to provide a rotational movement evaluation method , system, and program that can visualize and evaluate the physical load on the joints of the body, performance, etc. by relatively comparing the rotational coordinate system coordinate data of one's own rotational movement with the world coordinate system data of one's own rotational movement in a movement involving a rotational movement with an acceleration of 9.8 m/sec2 or more.
- the rotational movement motion evaluation method of the present invention is a rotational movement motion evaluation method that estimates and evaluates performance and/or physical load in exercise involving rotational movements with an acceleration of more than 9.8 m/ sec2 , and includes a rotational center definition step of defining a rotational center from at least one real rotation center and/or ideal rotation center obtained from a group of actual movements, rotational movements by skeletal estimation and motion capture, a step of obtaining world coordinate system coordinate data that is coordinate data of the world coordinate system in the rotational movement from the defined rotation center, a step of converting the world coordinate system coordinate data into rotating coordinate system local coordinate data that is local coordinate data of a rotating coordinate system with the rotational center within the human body as the origin in the rotational movement, and an evaluation step of relatively comparing and evaluating the values of two data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data of a predetermined position within the human body obtained from the same movement in the rotational movement.
- Figure 7 shows a diagram in which the spine of a person using his left arm to pitch a baseball towards us as a rotational motion is represented as a straight line NW, and the straight lines connecting the left shoulder LS and right shoulder RS of the person making the rotational motion, that is, the straight lines R1 and L1 connecting the left shoulder and right shoulder, are represented as straight lines LS and RS.
- a rotation center coordinate point C ( xc , yc , zc ) is found on the straight line NW shown in FIG. 7 and has the shortest distance from the straight lines LS and RS.
- the ideal rotation center coordinate point Ci shown in FIG. It is defined as:
- Rotation center coincidence rate (1) [Rate of coincidence between the center of rotation at maximum speed and the center of rotation at each time of rotational movement]
- the rotation center coincidence rate as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion, can be used to evaluate the performance of rotational motion (for example, pitching motion in baseball). By looking at this rotation center coincidence rate, it can be used to determine whether the body is shaking at the final acceleration of the rotational motion (for example, when the ball is released). If the center of rotation is shaking, energy is also used in the translational motion, which is thought to reduce efficiency.
- the motion mechanics of the pitcher's torso can be evaluated as being in the best state for rotational motion. Note that, if it is necessary to analyze a motion without information data on the spine, it is not possible to evaluate the efficiency of the mechanics by looking at the agreement rate between the ideal center of rotation and the real center of rotation. This is because the ideal rotation coordinates are substituted for the central coordinates of each data.
- information on the skeletal estimation during the rotation movements can be input using an application that performs skeletal estimation from a captured image of the actual movements.
- information on the motion capture during the rotation movements can be input using an application that performs motion capture from a captured image of the actual movements.
- the real center of rotation can be obtained from a group of actual movements, skeletal estimation, and rotational movements obtained by motion capture.
- the real center of rotation can be calculated from at least one of these groups, or can be automatically detected from at least one of these groups. Note that the real center of rotation can be obtained by combining any of these groups, for example, actual photographed images and skeletal estimation.
- Such information is input from the information input operation unit 24.
- the display unit 28 Based on the input information, the display unit 28 outputs the rotational movement exercise evaluation. All of this input to output can be done by a program. When using a program to do everything on the system, the only user information to be input is the ID (name, height, registration number, etc.), All of the steps from capturing the rotational motion ⁇ outputting a world coordinate system data group ⁇ detecting the center of rotation ⁇ converting to a rotational coordinate system ⁇ verification can be done automatically. Also, if the rotational motion is the motion of throwing a baseball, it is also possible to automatically define left-handed or right-handed throwing by detecting the direction in which the ball is thrown.
- a camera is set in the information input operation unit 24, then by inputting user information from the information input operation unit 24 and inputting an image from the information input operation unit 24, all of the steps from input to output of evaluation can be done automatically on the system.
- a rotational movement evaluation system 20 is shown, but with a similar configuration, by simply changing the program, it can also be made into a coordinate data conversion system for rotational movement that performs conversion of coordinate data in rotational movement.
- the second aspect of the program of the present invention is a program for making a computer function as each device in a coordinate data conversion system. That is, the second aspect of the program of the present invention makes a computer function as each device in a coordinate data conversion system in a rotational motion, including a rotational center definition device that defines a rotational center from at least one real rotational center and/or ideal rotational center obtained from a group of actual motion, skeletal estimation, and rotational motion by motion capture, a world coordinate system coordinate data acquisition device that obtains world coordinate system coordinate data, which is coordinate data of the world coordinate system that indicates the world coordinates of a predetermined position in the human body in the rotational motion for each time from the defined rotational center, a device that defines the center coordinate of the world coordinate system coordinate data for each time, a device that obtains orthogonal coordinate system data by matching one axis of an orthogonal coordinate system with a line segment connecting the center coordinate and a predetermined joint position, and a conversion device that converts the orthogonal coordinate system data into local coordinate
- the terminal device 32 and the server 30 are connected via the communication network 34, but it is also possible to input all programs into the terminal device 32 without using the communication network 34 and have the terminal device 32 function offline as a rotational motion evaluation system, or as a coordinate data conversion system.
- FIG. 16 shows a flowchart illustrating one embodiment of the rotational movement evaluation method in the rotational movement evaluation system 20 of the present invention.
- FIG. 16 shows a pattern in which a rotation center is defined from an actual rotation center using skeletal estimation.
- the computer processing is broadly divided into three parts: a part in which skeletal estimation is performed in the rotational movement evaluation system 20, an analysis part in which analysis is performed in the rotational movement evaluation system 20, and a display part in which the evaluation of the rotational movement is displayed in the rotational movement evaluation system 20.
- S108a ⁇ Body frame image insertion step> A body frame image is inserted.
- S107 body frame definition file reference step.
- the bone structure estimation video is displayed for reference.
- the next step includes a step of converting coordinate data from the world coordinate system to a rotating coordinate system, which is a characteristic step of the present invention.
- S108b ⁇ Three-dimensional coordinate-time data acquisition step [world coordinate system]> Time-based data of three-dimensional coordinates in the world coordinate system is acquired.
- S112 ⁇ Rotation center coordinate calculation step> The rotation center coordinate is calculated from the three-dimensional coordinate data in S108b.
- the rotation center coordinate calculation object skeleton definition file in the database is referenced in S111 (S111: rotation center coordinate calculation object skeleton definition file reference step).
- S114 ⁇ 3D coordinates/rotation center coordinates-time data acquisition step [world coordinate system]> Three-dimensional coordinate data in the world coordinate system is acquired for each time period.
- S116a ⁇ Unit Vector Calculation Step (During Rotation--Target Joint)> A unit vector of a joint that is an evaluation target during a rotational motion is calculated.
- S125 ⁇ Step for evaluating relative joint position (straight line matching rate) [rotating coordinate system]> The relative joint position (straight line matching rate) of the joint part to be evaluated in the rotating coordinate system is evaluated and displayed. This step can be provided as necessary. For example, in terms of the rotational motion of pitching, the linear matching rate between the line R1 from the spine to the right shoulder and the line L1 from the spine to the left shoulder shown in FIG. 7 can be evaluated, or the linear matching rate between the line R1 from the spine to the right shoulder and the line LA from the spine to the left arm can be evaluated. It can be evaluated that the higher the linear matching rate, the closer the rotational motion is to the ideal.
- S126 ⁇ Step of Drawing a Speed-Time Graph [Rotating Coordinate System]> A graph showing the speed of the joint part to be evaluated in the rotating coordinate system over time is drawn and displayed.
- S131 ⁇ Rotation center coordinate agreement rate [world coordinate system]> The agreement rate between the rotation center coordinates in the world coordinate system of the joint part to be evaluated and the ideal rotation center coordinates is evaluated and displayed. This step may be provided as necessary.
- the obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated.
- S135: ⁇ Relative comparison evaluation step> The obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated.
- this relative comparison for example, a graph showing the velocity in the rotating coordinate system of a predetermined position in the human body that is the evaluation target of S126, such as a joint, over time, is compared and evaluated with a graph showing the velocity in the world coordinate system of the joint that is the evaluation target of S132 over time.
- a maximum acceleration of a graph showing the acceleration in the rotating coordinate system of the joint part, which is the evaluation target of S127, for each time is relatively compared with a maximum acceleration of a graph showing the acceleration in the world coordinate system of a predetermined position in the human body, for example, a joint, which is the evaluation target of S133, for each time, and if the maximum acceleration in the rotating coordinate system is close to or greater than the maximum acceleration in the world coordinate system, it can be determined that the load on the joint part is large.
- a relative comparison is made between the areas of the graphs of the speeds shown for each time of the rotating coordinate system and the world coordinate system of a predetermined position in the human body, and if the area of the graph of the speeds shown for each time of the rotating coordinate system is close to or greater than the area of the graph of the speeds shown for each time of the world coordinate system, it can be determined that the load on the predetermined position in the human body, for example, a joint part, is large.
- the present invention is characterized by the fact that it does not compare data with that of others, but with one's own data. Therefore, although physical loads such as the load on joints caused by rotational movements vary from person to person, by comparing with one's own data, it is now possible to visualize, i.e., quantify, and evaluate physical loads, which was not possible before. Furthermore, in addition to evaluating physical loads such as the load on joints caused by rotational movements, the rotational movement motion evaluation system and rotational movement motion evaluation method of the present invention can also evaluate performance due to rotational movements by relatively comparing the data in the rotational coordinate system with the data in the world coordinate system.
- the center of rotation may be at least one real center of rotation obtained from the group of actual movements, skeletal estimation, and rotation movements by motion capture, and/or an ideal center of rotation may be used.
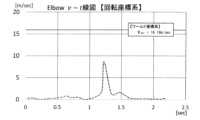
- Example 1 A left-handed pitcher A was actually asked to throw a baseball with his left arm, and a video of the left arm pitching was taken. The center of rotation was calculated based on skeletal estimation from the video. Then, the speed of the elbow in the left arm pitching motion was calculated for each time in the world coordinate system and the local rotating coordinate system.
- FIG. 17 shows a graph of the results in the world coordinate system. The maximum speed Vmax in the world coordinate system was 16.19 m/sec.
- FIG. 18 shows a graph of the results of the speed per time in the rotating coordinate system.
- the speed per time in the rotating coordinate system was 8.67 m/sec, even at the maximum speed Vmax, which is much slower than the maximum speed Vmax of the world coordinate system of 16.19 m/sec (53.55% when the maximum speed in the world coordinate system is 100%), and it can be determined that the load on the elbow in the left arm pitching motion is small. There is little possibility of injury even if such a pitching motion is continued.
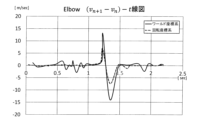
- 19 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relative to each other for the left arm's pitching motion.
- Example 2 Next, the center of rotation was calculated based on the skeleton estimation from a recorded video of right-handed pitcher B throwing a baseball with his right arm. Then, the velocity of the elbow in the pitching motion of the right arm was calculated for each time in the world coordinate system and the local rotating coordinate system.
- FIG. 21 shows a graph of the results in the world coordinate system. The maximum velocity Vmax in the world coordinate system was 16.21 m/sec.
- FIG. 22 shows a graph of the results of the velocity per time in the rotating coordinate system. In a relative comparison, the maximum velocity Vmax per time in the rotating coordinate system reached a value close to the Vmax of the world coordinate system of 16.21 m/sec, which was 16.03 m/sec (98.89% when the maximum velocity in the world coordinate system is 100%).
- the pitching motion places a large load on the elbow.
- 23 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relatively for the right arm during the pitching motion.
- the maximum acceleration in the rotating coordinate system exceeds the maximum acceleration in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is the joint in question.
- 24 shows the results of calculating and relatively comparing the displacement of the elbow in the world coordinate system and the local rotating coordinate system in relation to the elbow during the pitching motion of the right arm.
- the displacement of the elbow in the rotating coordinate system exceeds the displacement of the elbow in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is a joint part.
- the movement involving a rotational motion in sports using flying objects or sliding objects such as baseball, softball, soccer, tennis, golf, volleyball, basketball, cricket, hockey, rugby, American football, handball, water polo, bowling, lacrosse, table tennis, squash, badminton, ice hockey, etc.
- any movement involving a rotational motion such as dance or figure skating, etc.
- the movement involving a rotational motion of the present invention is included.
- any movement involving a rotational motion other than the above listed movements is included.
- the center of rotation of the body during the movement is somewhere on the spine, but in rotational movements in other sports, such as kicking a ball in soccer, the center of rotation is at the hip joint, etc.
- the center of rotation within the human body during movements involving rotational movements in this invention will differ depending on the type of movement, but the center of rotation within the human body can be defined according to the type of movement.
- the rotational coordinate system coordinate data of one's own rotational movement can be relatively compared with the world coordinate system data of one's own rotational movement, thereby visualizing and evaluating the physical load acting on the joints of the body, performance, etc.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Biomedical Technology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physiology (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Multimedia (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- General Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
To provide a rotating action motion assessment method, system, and program, that enables visualizing and assessing bodily loads placed on joints and so forth of the body, performance, and so forth, in motion involving rotating actions with an acceleration of 9.8 m/sec2 or higher, by relative comparison between rotational coordinate system coordinate data of own rotating actions and world coordinate system data of the own rotating actions. A rotating action motion assessment method according to the present invention includes a rotation center defining step for defining a center of rotation from an actual rotation center and/or an ideal rotation center, a step for obtaining world coordinate system coordinate data, a step for converting into rotation coordinate system local coordinate data that is local coordinate data in a rotation coordinate system of which the center of rotation within a human body in the rotating action is the origin, and an assessing step for assessing by performing relative comparison between values of two sets of data, which are the world coordinate system coordinate data of a predetermined position within the human body that is obtained from the same action in the rotating action, and the rotation coordinate system local coordinate data.
Description
本発明は、回転動作を伴う運動の評価方法に関し、特に9.8m/sec2以上の加速度の回転動作を伴う運動の回転動作運動評価方法及びシステム並びにプログラムに関する。
The present invention relates to a method for evaluating exercise involving rotational motion, and more particularly to a method, system, and program for evaluating rotational motion involving rotational motion with an acceleration of 9.8 m/sec 2 or more.
モーションキャプチャ、骨格推定等、運動を解析・評価を行う技術や手法が幅広く活用されている。
Technologies and methods for analyzing and evaluating movement, such as motion capture and skeletal estimation, are widely used.
特に、スポーツの領域においては、パフォーマンス評価においては非常に有用なツールとなっている。
In particular, in the field of sports, it has become a very useful tool for performance evaluation.
ただし、パフォーマンス評価には有用であるが、被験者の身体負荷については明確な指標がなく、例えば、野球においては、幼少期より投球数の制限を行っているが、肩や肘の故障が減らない状況である。
However, although it is useful for evaluating performance, it does not provide a clear indicator of the physical load on the subjects. For example, in baseball, the number of pitches thrown is limited from an early age, but the incidence of shoulder and elbow injuries has not decreased.
例えば、特許文献1には、身体動作解析可視化装置が開示されている。特許文献1では、段落[0010]に「3次元動作計測手段は、…3次元空間における身体等の特徴点の3次元座標値の時系列データすなわち動作データを生成する。」とあるように、人体内の複数の予め定義された特徴点における3次元座標値、即ち個々の独立した固定の複数の局所座標を使用している(特許文献1の図7参照)。そして、人体シミュレーションで各部位の最適化処理をしている。
For example, Patent Document 1 discloses a body movement analysis and visualization device. In Patent Document 1, as stated in paragraph [0010], "The three-dimensional movement measurement means generates time-series data of three-dimensional coordinate values of feature points of the body, etc. in three-dimensional space, i.e., movement data," it uses three-dimensional coordinate values of multiple predefined feature points in the human body, i.e., multiple individual, independent, fixed local coordinates (see Figure 7 in Patent Document 1). Then, optimization processing of each part is performed using a human body simulation.
しかし、特許文献1のように、人体内の個々の独立した固定の複数の局所座標を使用し、人体シミュレーションで各部位の最適化処理をする場合、それら固定の複数の局所座標から見た人体の動き等のパフォーマンス評価(例えば、ボールの射出速度が最高となる投球動作になっているか否か)をする場合には優れているものの、身体の負荷という観点から評価することはできなかった。
However, as in Patent Document 1, when multiple independent fixed local coordinates within the human body are used to perform optimization processing for each part in a human body simulation, this is excellent for evaluating the performance of the human body's movements as viewed from these multiple fixed local coordinates (for example, whether the pitching motion maximizes the ball's exit velocity), but it is not possible to evaluate it from the perspective of the load on the body.
従来の身体動作解析では、身体動作をリジットなモデルで考えているため、身体の負荷という観点から評価することができなかった。
In conventional body movement analysis, body movement is considered as a rigid model, so it is not possible to evaluate it from the perspective of the load on the body.
本発明者が鋭意研究を続けた結果、特に9.8m/sec2以上の加速度の回転動作を伴う運動において身体負荷が大きくなること、そして、かかる回転動作を回転座標系の原点(回転の中心座標という時間毎に唯一の局所座標)を基準とした運動として取り扱い、唯一の系ですべての関節の運動を自分自身の運動のワールド座標系のデータと相対比較し評価することで、身体負荷の程度を評価できることを見出し、本発明に到達した。
As a result of the inventor's intensive research, he discovered that physical load is particularly large in movements involving rotational movements with an acceleration of 9.8 m/sec2 or more , and that the degree of physical load can be evaluated by treating such rotational movements as movements based on the origin of a rotational coordinate system (the only local coordinate for each time, called the center coordinate of rotation) and evaluating the movements of all joints in a unique system by relative comparison with the data in the world coordinate system of one's own movement, thus arriving at the present invention.
即ち、本発明は、9.8m/sec2以上の加速度の回転動作を伴う運動において、自分の回転動作の回転座標系座標データと自分の回転動作のワールド座標系データとを相対比較することで、身体の関節等に生じる身体負荷やパフォーマンス等を可視化して評価できるようにした回転動作運動評価方法及びシステム並びにプログラムを提供することを目的とする。
In other words, the present invention aims to provide a rotational movement evaluation method , system, and program that can visualize and evaluate the physical load on the joints of the body, performance, etc. by relatively comparing the rotational coordinate system coordinate data of one's own rotational movement with the world coordinate system data of one's own rotational movement in a movement involving a rotational movement with an acceleration of 9.8 m/sec2 or more.
本発明の回転動作運動評価方法は、9.8m/sec2を超える加速度の回転動作を伴う運動におけるパフォーマンス及び/又は身体負荷を推定し評価する回転動作運動評価方法であって、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義工程と、前記定義された回転中心から前記回転動作でのワールド座標系の座標データであるワールド座標系座標データを得る工程と、前記ワールド座標系座標データを、前記回転動作における人体内の回転中心を原点とする回転座標系のローカル座標データである回転座標系ローカル座標データに変換する工程と、前記回転動作での同一の動作から得られた、人体内の所定位置の前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータの値を相対比較し評価する評価工程と、を含む、回転動作運動評価方法である。
The rotational movement motion evaluation method of the present invention is a rotational movement motion evaluation method that estimates and evaluates performance and/or physical load in exercise involving rotational movements with an acceleration of more than 9.8 m/ sec2 , and includes a rotational center definition step of defining a rotational center from at least one real rotation center and/or ideal rotation center obtained from a group of actual movements, rotational movements by skeletal estimation and motion capture, a step of obtaining world coordinate system coordinate data that is coordinate data of the world coordinate system in the rotational movement from the defined rotation center, a step of converting the world coordinate system coordinate data into rotating coordinate system local coordinate data that is local coordinate data of a rotating coordinate system with the rotational center within the human body as the origin in the rotational movement, and an evaluation step of relatively comparing and evaluating the values of two data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data of a predetermined position within the human body obtained from the same movement in the rotational movement.
前記ワールド座標系座標データが、人体内の所定位置のワールド座標を時間毎に示したワールド座標データであり、前記回転座標系ローカル座標データが、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データであるのが好適である。
It is preferable that the world coordinate system coordinate data is world coordinate data that indicates the world coordinates of a predetermined position inside the human body for each time, and the rotational coordinate system local coordinate data is local coordinate data that indicates the local coordinates of a predetermined position inside the human body for each time, with the center of rotation inside the human body as the origin during the rotational movement.
前記評価工程が、人体内の所定位置の時間毎に示した速度又は加速度で相対比較して評価する工程であるのが好適である。
It is preferable that the evaluation step is a step of evaluating by relative comparison the speed or acceleration shown for each time at a given position in the human body.
前記評価が身体負荷の評価であり、前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータが人体内の所定位置の時間毎に示した速度又は加速度に関するデータであり、前記回転座標系ローカル座標データの最大速度又は最大加速度が、前記ワールド座標系座標データの最大速度又は最大加速度、に対して、近しいか又はそれ以上である場合に、身体負荷が大きいと判定するのが好適である。
The evaluation is an evaluation of physical load, and the two data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data, are data relating to the speed or acceleration shown at each time at a specific position in the human body, and it is preferable to determine that the physical load is high when the maximum speed or maximum acceleration of the rotating coordinate system local coordinate data is close to or greater than the maximum speed or maximum acceleration of the world coordinate system coordinate data.
前記評価が身体負荷の評価であり、前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータが、人体内の所定位置の時間毎に示した速度のグラフの面積又は人体内の所定位置の変位に関するデータであり、前記回転座標系ローカル座標データの人体内の所定位置の時間毎に示した速度のグラフの面積又は人体内の所定位置の変位が、前記ワールド座標系座標データの人体内の所定位置の時間毎に示した速度のグラフの面積又は人体内の所定位置の変位、に対して、近しいか又はそれ以上である場合に、身体負荷が大きいと判定するのが好適である。
The evaluation is an evaluation of physical load, and the two pieces of data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data, are data relating to the area of a graph of velocity shown for each time at a specific position in the human body or the displacement of a specific position in the human body, and it is preferable to determine that the physical load is high when the area of the graph of velocity shown for each time at a specific position in the human body or the displacement of a specific position in the human body in the rotating coordinate system local coordinate data is close to or greater than the area of the graph of velocity shown for each time at a specific position in the human body or the displacement of a specific position in the human body in the world coordinate system coordinate data.
前記回転中心定義工程において、前記実在回転中心と前記理想回転中心との回転中心一致率を評価する工程と、を含むのが好適である。
The rotation center definition process preferably includes a process of evaluating the rotation center coincidence rate between the actual rotation center and the ideal rotation center.
本発明の回転動作運動における座標データの変換方法は、前記回転動作運動評価方法に用いられる、回転動作運動における座標データの変換方法であり、9.8m/sec2を超える加速度の回転動作を伴う運動において、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義工程と、前記定義された回転中心から前記回転動作での人体内の所定位置のワールド座標を時間毎に示したワールド座標系の座標データであるワールド座標系座標データを得る工程と、前記ワールド座標系座標データの中心座標を時間毎に定義する工程と、前記中心座標と所定の関節位置とを結ぶ線分に、直交座標系のうちの1軸を合致させて直交座標系データを得る工程と、前記直交座標系データを、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データに変換する工程と、を含む、回転動作運動における座標データの変換方法である。
The method for converting coordinate data in a rotational movement of the present invention is a method for converting coordinate data in a rotational movement used in the method for evaluating a rotational movement, and includes the steps of: a rotational center definition step of defining a rotational center from at least one real rotation center and/or an ideal rotation center obtained from a group of actual movements, rotational movements by skeletal estimation and motion capture, in a movement involving a rotational movement with an acceleration exceeding 9.8 m/sec2; a step of obtaining world coordinate system coordinate data, which is coordinate data of a world coordinate system showing the world coordinates of a predetermined position in the human body during the rotational movement for each time from the defined rotational center; a step of defining a center coordinate of the world coordinate system coordinate data for each time; a step of matching one axis of a Cartesian coordinate system with a line segment connecting the center coordinate and a predetermined joint position to obtain Cartesian coordinate system data; and a step of converting the Cartesian coordinate system data into local coordinate data showing the local coordinates of a predetermined position in the human body for each time, the local coordinates having the rotational center in the human body as the origin during the rotational movement.
本発明の回転動作運動評価システムは、9.8m/sec2を超える加速度の回転動作を伴う運動におけるパフォーマンス及び/又は身体負荷を推定し評価する回転動作運動評価システムであって、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義装置と、前記定義された回転中心から前記回転動作でのワールド座標系の座標データであるワールド座標系座標データを得るワールド座標系座標データ取得装置と、前記ワールド座標系座標データを、前記回転動作における人体内の回転中心を原点とする回転座標系のローカル座標データである回転座標系ローカル座標データに変換する変換装置と、前記回転動作での同一の動作から得られた、人体内の所定位置の前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータの値を相対比較する相対比較装置と、を含む、回転動作運動評価システムである。
The rotational movement motion evaluation system of the present invention is a rotational movement motion evaluation system that estimates and evaluates performance and/or physical load in exercise involving rotational movements with an acceleration of more than 9.8 m/ sec2 , and includes a rotational center definition device that defines a rotational center from at least one real rotation center and/or ideal rotation center obtained from a group of actual movements, rotational movements by skeletal estimation and motion capture, a world coordinate system coordinate data acquisition device that obtains world coordinate system coordinate data, which is coordinate data of the world coordinate system in the rotational movement from the defined rotation center, a conversion device that converts the world coordinate system coordinate data into rotating coordinate system local coordinate data, which is local coordinate data of a rotating coordinate system whose origin is the rotational center within the human body in the rotational movement, and a relative comparison device that relatively compares the values of two data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data of a predetermined position within the human body, obtained from the same movement in the rotational movement.
前記ワールド座標系座標データが、人体内の所定位置のワールド座標を時間毎に示したワールド座標データであり、前記回転座標系ローカル座標データが、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データであるのが好適である。
It is preferable that the world coordinate system coordinate data is world coordinate data that indicates the world coordinates of a predetermined position inside the human body for each time, and the rotational coordinate system local coordinate data is local coordinate data that indicates the local coordinates of a predetermined position inside the human body for each time, with the center of rotation inside the human body as the origin during the rotational movement.
前記評価が身体負荷の評価であり、前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータが人体内の所定位置の時間毎に示した速度に関するデータであり、前記回転座標系ローカル座標データの速度が前記ワールド座標系座標データの速度に近しいか又はそれ以上である場合に、身体負荷が大きいと判定されるようにするのが好適である。
The evaluation is an evaluation of physical load, and the two data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data, are data relating to the speed shown at each time at a specific position in the human body, and it is preferable that the physical load is determined to be high when the speed of the rotating coordinate system local coordinate data is close to or greater than the speed of the world coordinate system coordinate data.
本発明の回転動作運動における座標データの変換システムは、前記回転動作運動評価システムに用いられる、回転動作運動における座標データの変換システムであり、9.8m/sec2を超える加速度の回転動作を伴う運動において、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義装置と、前記定義された回転中心から前記回転動作での人体内の所定位置のワールド座標を時間毎に示したワールド座標系の座標データであるワールド座標系座標データを得るワールド座標系座標データ取得装置と、前記ワールド座標系座標データの中心座標を時間毎に定義する装置と、前記中心座標と所定の関節位置とを結ぶ線分に、直交座標系のうちの1軸を合致させて直交座標系データを得る装置と、前記直交座標系データを、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データに変換する変換装置と、を含む、回転動作運動における座標データの変換システムである。
The coordinate data conversion system for rotational movement of the present invention is a coordinate data conversion system for rotational movement used in the rotational movement evaluation system, and includes: a rotational center definition device that defines a rotational center from at least one real rotation center and/or ideal rotation center obtained from a group of actual movements, rotational movements by skeletal estimation and motion capture, in a movement involving rotational movements with an acceleration exceeding 9.8 m/sec2; a world coordinate system coordinate data acquisition device that obtains world coordinate system coordinate data, which is coordinate data of the world coordinate system that shows the world coordinates of a predetermined position within the human body during the rotational movement for each time from the defined rotational center; a device that defines the center coordinate of the world coordinate system coordinate data for each time; a device that obtains orthogonal coordinate system data by matching one axis of an orthogonal coordinate system with a line segment connecting the center coordinate and a predetermined joint position; and a conversion device that converts the orthogonal coordinate system data into local coordinate data that shows the local coordinates of a predetermined position within the human body for each time, with the rotational center within the human body as the origin during the rotational movement.
本発明のプログラムの第一の態様は、コンピュータを、前記回転動作運動評価システムにおける各装置として機能させるためのプログラムである。
The first aspect of the program of the present invention is a program for causing a computer to function as each device in the rotational motion evaluation system.
本発明のプログラムの第二の態様は、コンピュータを、前記回転動作運動における座標データの変換システムにおける各装置として機能させるためのプログラムである。
The second aspect of the program of the present invention is a program for causing a computer to function as each device in a coordinate data conversion system for the rotational motion.
本発明によれば、9.8m/sec2以上の加速度の回転動作を伴う運動において、自分の回転動作の回転座標系座標データと自分の回転動作のワールド座標系データとを相対比較することで、身体の関節等に生じる身体負荷やパフォーマンス等を可視化して評価できるようにした回転動作運動評価方法及びシステム並びにプログラムを提供することができるという著大な効果を奏する。
According to the present invention, in a movement involving a rotational movement with an acceleration of 9.8 m/sec2 or more , a rotational movement motion evaluation method, system, and program can be provided that can visualize and evaluate the physical load on the joints of the body, performance, etc. by relatively comparing the rotational coordinate system coordinate data of one's own rotational movement with the world coordinate system data of one's own rotational movement, thereby achieving the remarkable effect of providing the method, system, and program.
以下に本発明の実施の形態を説明するが、これら実施の形態は例示的に示されるもので、本発明の技術思想から逸脱しない限り種々の変形が可能なことはいうまでもない。図示において、同一部材は同一符号であらわされる。
The following describes embodiments of the present invention, but these embodiments are shown as examples, and it goes without saying that various modifications are possible without departing from the technical concept of the present invention. In the drawings, identical parts are represented by the same reference numerals.
9.8m/sec2以上の加速度の回転動作を伴う運動の例として、野球の投手の投球動作を考えてみる。野球の投手の肩や肘の故障に対する要因には、球数だけではなく、投球時の負荷もあるため、投球時の負荷を加味する必要がある。即ち、投球回数だけではなく、運動時の負荷(投球動作の負荷)を考慮する必要がある。
As an example of a movement involving a rotational movement with an acceleration of 9.8 m/sec2 or more , let us consider the pitching motion of a baseball pitcher. Since the factors that lead to injuries to the shoulders and elbows of baseball pitchers include not only the number of pitches but also the load placed on the pitcher, it is necessary to take into account the load placed on the pitcher. In other words, it is necessary to consider not only the number of pitches but also the load placed on the pitcher during exercise (the load placed on the pitching motion).
投手がたとえ一般的には故障しにくい正しいと思われるフォームで投げていても、それがその投手の腕や肩にとって、過剰な運動時の負荷がかかっているかどうかは、リジッドなモデルを想定してそのモデルがいくらお手本通りの投げ方になっているかどうかを分析しても解明できない。本発明では、人間の身体をセミリジッドなモデルと考え、回転動作を伴う運動時の関節の負荷を解明することに成功した。
Even if a pitcher is using what is generally considered to be a correct form that is less likely to cause injury, it is impossible to determine whether the exercise places excessive strain on the pitcher's arms and shoulders, even if one assumes a rigid model and analyzes whether the model is throwing exactly like the model. In this invention, the human body is considered as a semi-rigid model, and we have succeeded in elucidating the load on the joints during exercise that involves rotational movements.
<関節について>
図1に人間の関節の模式図を示す。図1(a)に示される骨10と骨12を繋ぐ関節14は、靭帯、軟骨や筋肉等で形成されており、力学的には弾性体と理解でき、セミリジットな部位である。関節が故障(怪我)する原因は、この弾性体に過度な応力(主に張力)がかかったためと考えられる。骨と骨を繋ぐ関節を弾性体と考えると、図1(b)に示されるような関節14が圧縮される方向の場合、骨同士が干渉するので、ポアソン比の限界以上に圧縮されない限り、圧縮では問題ないと考えられる。一方、図1(c)に示されるような関節14が引っ張られる方向の場合は問題であり、特に関節の周囲を取り巻いて関節を連結している靭帯が損傷する原因については、関節に過度な引張荷重が掛かることが原因と考えられる。 <About joints>
FIG. 1 shows a schematic diagram of a human joint. Thejoint 14 connecting the bones 10 and 12 shown in FIG. 1(a) is formed of ligaments, cartilage, muscles, etc., and can be understood as an elastic body mechanically, and is a semi-rigid part. It is believed that the cause of the joint failure (injury) is the application of excessive stress (mainly tension) to this elastic body. If the joint connecting the bones is considered to be an elastic body, when the joint 14 is compressed as shown in FIG. 1(b), the bones interfere with each other, so it is thought that compression is not a problem as long as it is not compressed beyond the limit of the Poisson's ratio. On the other hand, when the joint 14 is pulled as shown in FIG. 1(c), it is a problem, and it is thought that the cause of damage to the ligaments surrounding the joint and connecting it in particular is the application of excessive tensile load to the joint.
図1に人間の関節の模式図を示す。図1(a)に示される骨10と骨12を繋ぐ関節14は、靭帯、軟骨や筋肉等で形成されており、力学的には弾性体と理解でき、セミリジットな部位である。関節が故障(怪我)する原因は、この弾性体に過度な応力(主に張力)がかかったためと考えられる。骨と骨を繋ぐ関節を弾性体と考えると、図1(b)に示されるような関節14が圧縮される方向の場合、骨同士が干渉するので、ポアソン比の限界以上に圧縮されない限り、圧縮では問題ないと考えられる。一方、図1(c)に示されるような関節14が引っ張られる方向の場合は問題であり、特に関節の周囲を取り巻いて関節を連結している靭帯が損傷する原因については、関節に過度な引張荷重が掛かることが原因と考えられる。 <About joints>
FIG. 1 shows a schematic diagram of a human joint. The
1.<力積について>
力Fを時間tで積分すると、力積となる。下記においてmは質量、aは加速度、vは速度、nは負荷の回数(投手の場合;投球数)である。

ここで、miの変動が無い、若しくは無視できるとすると、


[Cは積分定数]
1. About impulse
The force F is integrated over time t to obtain the impulse. In the following equation, m is mass, a is acceleration, v is velocity, and n is the number of loads (in the case of a pitcher, the number of pitches).
Here, if there is no fluctuation in m i or it can be ignored,
[C is an integral constant]
力Fを時間tで積分すると、力積となる。下記においてmは質量、aは加速度、vは速度、nは負荷の回数(投手の場合;投球数)である。
The force F is integrated over time t to obtain the impulse. In the following equation, m is mass, a is acceleration, v is velocity, and n is the number of loads (in the case of a pitcher, the number of pitches).
2.<速度成分について>
上記より、運動中に質量mの変動が無い、もしくは変化量が無視できるとすると、時間毎の速度成分(v-t)で身体の負荷を評価することができることになる。 2. <About velocity components>
From the above, if we assume that there is no change in mass m during exercise, or that the amount of change can be ignored, then the load on the body can be evaluated using the time component of velocity (vt).
上記より、運動中に質量mの変動が無い、もしくは変化量が無視できるとすると、時間毎の速度成分(v-t)で身体の負荷を評価することができることになる。 2. <About velocity components>
From the above, if we assume that there is no change in mass m during exercise, or that the amount of change can be ignored, then the load on the body can be evaluated using the time component of velocity (vt).
3-1.<速度成分と力積の関係について>
[ワールド座標系モデル]
そして、速度成分を力積のパラメータととらえると、ワールド座標系の速度成分は、ワールド座標系(地球)に対する力積のパラメータと捉えることができると考えられる。即ち、ワールド座標系で見た地球に対する運動が、運動動作のパフォーマンスと考えられる。図2にワールド座標系と、後述するローカルの回転座標系のそれぞれの座標系シンボルを示す。 3-1. <Relationship between velocity components and impulse>
[World coordinate system model]
If we consider the velocity components as parameters of impulse, then we can consider the velocity components of the world coordinate system as parameters of impulse with respect to the world coordinate system (Earth). In other words, the movement with respect to the Earth as seen in the world coordinate system can be considered as the performance of the movement action. Figure 2 shows the coordinate system symbols of the world coordinate system and the local rotating coordinate system described later.
[ワールド座標系モデル]
そして、速度成分を力積のパラメータととらえると、ワールド座標系の速度成分は、ワールド座標系(地球)に対する力積のパラメータと捉えることができると考えられる。即ち、ワールド座標系で見た地球に対する運動が、運動動作のパフォーマンスと考えられる。図2にワールド座標系と、後述するローカルの回転座標系のそれぞれの座標系シンボルを示す。 3-1. <Relationship between velocity components and impulse>
[World coordinate system model]
If we consider the velocity components as parameters of impulse, then we can consider the velocity components of the world coordinate system as parameters of impulse with respect to the world coordinate system (Earth). In other words, the movement with respect to the Earth as seen in the world coordinate system can be considered as the performance of the movement action. Figure 2 shows the coordinate system symbols of the world coordinate system and the local rotating coordinate system described later.
[ワールド座標系:円軌道を逸脱しないモデル]
図3に示すように、任意の物体16が時間t1からt2の間に、位置Pos.1(座標:x1,y1,z1)から位置Pos.2(座標:x2,y2,z2)に、円軌道上を加速した場合、加速度a1,a2は、速度v2とv1の差分として表される。またその時の平均速度vは、

となる。図3中、符号18は円軌道の円の中心である。
[World coordinate system: model that does not deviate from a circular orbit]
As shown in Figure 3, when an arbitrary object 16 accelerates on a circular orbit from position Pos.1 (coordinates: x1 , y1 , z1 ) to position Pos.2 (coordinates: x2 , y2 , z2 ) between time t1 and t2 , the accelerations a1 and a2 are expressed as the difference between velocities v2 and v1 . The average velocity v at that time is expressed as follows:
In FIG. 3, reference numeral 18 denotes the center of the circular orbit.
図3に示すように、任意の物体16が時間t1からt2の間に、位置Pos.1(座標:x1,y1,z1)から位置Pos.2(座標:x2,y2,z2)に、円軌道上を加速した場合、加速度a1,a2は、速度v2とv1の差分として表される。またその時の平均速度vは、
As shown in Figure 3, when an arbitrary object 16 accelerates on a circular orbit from position Pos.1 (coordinates: x1 , y1 , z1 ) to position Pos.2 (coordinates: x2 , y2 , z2 ) between time t1 and t2 , the accelerations a1 and a2 are expressed as the difference between velocities v2 and v1 . The average velocity v at that time is expressed as follows:
[ワールド座標系:円軌道を逸脱するモデル]
一方、図4に示すように、別の任意の物体16が、円軌道を逸脱して加速した場合、加速度は円軌道を逸脱しないモデルと同様、速度ベクトルの差として表される。またその時の平均速度v'は、

となる。
[World coordinate system: model deviating from circular orbit]
On the other hand, as shown in FIG. 4, if another arbitrary object 16 deviates from the circular orbit and accelerates, the acceleration is expressed as the difference in velocity vectors, just like the model that does not deviate from the circular orbit. Also, the average velocity v' at that time is expressed as follows:
It becomes.
一方、図4に示すように、別の任意の物体16が、円軌道を逸脱して加速した場合、加速度は円軌道を逸脱しないモデルと同様、速度ベクトルの差として表される。またその時の平均速度v'は、
On the other hand, as shown in FIG. 4, if another arbitrary object 16 deviates from the circular orbit and accelerates, the acceleration is expressed as the difference in velocity vectors, just like the model that does not deviate from the circular orbit. Also, the average velocity v' at that time is expressed as follows:
このように、ワールド座標系で考えても、ワールド座標系から得られる平均速度から、その平均速度が「円軌道を逸脱したか否か」の判断を行うことはできない。なお、円軌道を逸脱しないモデルと円軌道を逸脱するモデルとが、同一の値(平均速度)を示す場合もある。
In this way, even when considering the world coordinate system, it is not possible to determine whether or not the average speed obtained from the world coordinate system has deviated from a circular orbit. Note that there are cases where a model that does not deviate from a circular orbit and a model that does deviate from a circular orbit show the same value (average speed).
3-2.<速度成分と力積の関係について>
[回転座標系モデル]
回転運動動作における回転軸は個人によっても異なるので、ワールド座標系で考えても、そのフォームがお手本通りかどうかしかわからない。しかし、速度成分を力積のパラメータととらえると、回転動作をする者の身体内の回転中心座標を定義した場合の回転座標系の速度成分は、回転座標系(身体;胴体)に対する力積のパラメータと捉えることができると考えられる。そして、身体に対する運動を身体負荷と考えることができる。 3-2. <Relationship between velocity components and impulse>
[Rotating coordinate system model]
Since the axis of rotation in rotational movements differs from person to person, even if we consider it in the world coordinate system, we can only tell whether the form is as shown in the example. However, if we consider the velocity component as an impulse parameter, the velocity component of the rotational coordinate system when the rotation center coordinates in the body of the person performing the rotational movement are defined can be considered as an impulse parameter for the rotational coordinate system (body; torso). And the movement of the body can be considered as a physical load.
[回転座標系モデル]
回転運動動作における回転軸は個人によっても異なるので、ワールド座標系で考えても、そのフォームがお手本通りかどうかしかわからない。しかし、速度成分を力積のパラメータととらえると、回転動作をする者の身体内の回転中心座標を定義した場合の回転座標系の速度成分は、回転座標系(身体;胴体)に対する力積のパラメータと捉えることができると考えられる。そして、身体に対する運動を身体負荷と考えることができる。 3-2. <Relationship between velocity components and impulse>
[Rotating coordinate system model]
Since the axis of rotation in rotational movements differs from person to person, even if we consider it in the world coordinate system, we can only tell whether the form is as shown in the example. However, if we consider the velocity component as an impulse parameter, the velocity component of the rotational coordinate system when the rotation center coordinates in the body of the person performing the rotational movement are defined can be considered as an impulse parameter for the rotational coordinate system (body; torso). And the movement of the body can be considered as a physical load.
[回転座標系:円軌道を逸脱しないモデル]
図5に示すように、任意の物体と関連付けられた物体(e.g. 肘に対する肩のように接続された物体)が存在し、連動して運動している場合、その関連付けられた物体と中心座標とを結ぶ線分と一つの軸を合致させることで、ローカルの回転座標系の座標に変換する。ローカルの回転座標系は、本明細書では単に「回転座標系」と呼ぶことがある。即ち、例えば、回転座標系ローカル座標データは、単に「回転座標系座標データ」と呼ぶことがある。 [Rotating coordinate system: model that does not deviate from a circular orbit]
As shown in Fig. 5, when an object associated with an arbitrary object (e.g., an object connected to an elbow like a shoulder) exists and moves in conjunction with the arbitrary object, the coordinates are converted into those of the local rotating coordinate system by matching a line segment connecting the associated object with the center coordinates with one axis. The local rotating coordinate system may be simply called a "rotating coordinate system" in this specification. That is, for example, the rotating coordinate system local coordinate data may be simply called "rotating coordinate system coordinate data".
図5に示すように、任意の物体と関連付けられた物体(e.g. 肘に対する肩のように接続された物体)が存在し、連動して運動している場合、その関連付けられた物体と中心座標とを結ぶ線分と一つの軸を合致させることで、ローカルの回転座標系の座標に変換する。ローカルの回転座標系は、本明細書では単に「回転座標系」と呼ぶことがある。即ち、例えば、回転座標系ローカル座標データは、単に「回転座標系座標データ」と呼ぶことがある。 [Rotating coordinate system: model that does not deviate from a circular orbit]
As shown in Fig. 5, when an object associated with an arbitrary object (e.g., an object connected to an elbow like a shoulder) exists and moves in conjunction with the arbitrary object, the coordinates are converted into those of the local rotating coordinate system by matching a line segment connecting the associated object with the center coordinates with one axis. The local rotating coordinate system may be simply called a "rotating coordinate system" in this specification. That is, for example, the rotating coordinate system local coordinate data may be simply called "rotating coordinate system coordinate data".
ワールド座標系のデータを回転座標系のデータに変換することで、回転座標系での平均速度の算出が可能となる。円軌道上を運動する物体の回転座標系での平均速度vRは、

となる。回転軸の回転方向と運動の回転方向が一致するため、v>vRとなる。(v>>vR)
回転座標系の速度はワールド座標系に対して遅くなるため、速度の差分も小さくなり、加速度も中心に向かう向心力に近くなり、関節に掛かる力も圧縮荷重成分が多くなる。 By converting the data in the world coordinate system into data in the rotating coordinate system, it is possible to calculate the average velocity in the rotating coordinate system. The average velocity vR in the rotating coordinate system of an object moving on a circular orbit is given by:
Since the direction of rotation of the axis of rotation and the direction of rotation of the motion are the same, v> vR . (v>> vR )
Because the speed of the rotating coordinate system is slower than that of the world coordinate system, the difference in speed is also smaller, the acceleration approaches a centripetal force toward the center, and the force acting on the joints has a larger compressive load component.
回転座標系の速度はワールド座標系に対して遅くなるため、速度の差分も小さくなり、加速度も中心に向かう向心力に近くなり、関節に掛かる力も圧縮荷重成分が多くなる。 By converting the data in the world coordinate system into data in the rotating coordinate system, it is possible to calculate the average velocity in the rotating coordinate system. The average velocity vR in the rotating coordinate system of an object moving on a circular orbit is given by:
Because the speed of the rotating coordinate system is slower than that of the world coordinate system, the difference in speed is also smaller, the acceleration approaches a centripetal force toward the center, and the force acting on the joints has a larger compressive load component.
[回転座標系:円軌道を逸脱するモデル]
図6に回転座標系の円軌道を逸脱するモデルを示す。図5と同様に、任意の物体と関連付けられた物体(e.g. 肘に対する肩のように接続された物体)が存在し、連動して運動している場合、その関連付けられた物体と中心座標とを結ぶ線分と一つの軸を合致させることで、回転座標系の座標に変換する。
円軌道を逸脱するモデルの回転座標系での平均速度は、

となる。
v'>vR'となる場合であっても、vR'/v'はvR/vよりも大きい値をとり、v'とvR'が近しい又はv'≦vR'となる場合は、円軌道を逸脱している可能性が大きいため、円軌道を逸脱していると判断することができる。「円軌道を逸脱している=過度な引張荷重が掛かっている」と考えられるため、回転動作における負荷の判定ができるのである。 [Rotating coordinate system: model deviating from circular orbit]
A model that deviates from the circular orbit of the rotating coordinate system is shown in Figure 6. As in Figure 5, when an object associated with an arbitrary object (e.g., an object connected to an elbow like a shoulder) exists and moves in conjunction with the object, the coordinates are converted to those of the rotating coordinate system by matching a line segment connecting the associated object and the center coordinate with one axis.
The average velocity of the model deviating from a circular orbit in the rotating coordinate system is
It becomes.
Even when v'> vR ', vR '/v' is greater than vR /v, and when v' and vR ' are close or v'≦ vR ', there is a high possibility that the circular orbit has deviated, so it can be determined that the circular orbit has deviated. Since it can be considered that "deviation from a circular orbit = excessive tensile load is being applied," it is possible to determine the load during rotational operation.
図6に回転座標系の円軌道を逸脱するモデルを示す。図5と同様に、任意の物体と関連付けられた物体(e.g. 肘に対する肩のように接続された物体)が存在し、連動して運動している場合、その関連付けられた物体と中心座標とを結ぶ線分と一つの軸を合致させることで、回転座標系の座標に変換する。
円軌道を逸脱するモデルの回転座標系での平均速度は、
v'>vR'となる場合であっても、vR'/v'はvR/vよりも大きい値をとり、v'とvR'が近しい又はv'≦vR'となる場合は、円軌道を逸脱している可能性が大きいため、円軌道を逸脱していると判断することができる。「円軌道を逸脱している=過度な引張荷重が掛かっている」と考えられるため、回転動作における負荷の判定ができるのである。 [Rotating coordinate system: model deviating from circular orbit]
A model that deviates from the circular orbit of the rotating coordinate system is shown in Figure 6. As in Figure 5, when an object associated with an arbitrary object (e.g., an object connected to an elbow like a shoulder) exists and moves in conjunction with the object, the coordinates are converted to those of the rotating coordinate system by matching a line segment connecting the associated object and the center coordinate with one axis.
The average velocity of the model deviating from a circular orbit in the rotating coordinate system is
Even when v'> vR ', vR '/v' is greater than vR /v, and when v' and vR ' are close or v'≦ vR ', there is a high possibility that the circular orbit has deviated, so it can be determined that the circular orbit has deviated. Since it can be considered that "deviation from a circular orbit = excessive tensile load is being applied," it is possible to determine the load during rotational operation.
4. このように、同一の運動から生成された、ワールド座標系とその運動者のローカルの回転座標系の二つの(力積)データは次元(単位系)が同じとなるので、相対比較が可能となる。
4. In this way, the two (impulse) data in the world coordinate system and the local rotating coordinate system of the mover, generated from the same movement, have the same dimensions (unit system), making relative comparison possible.
5. そして、同一の運動から生成した、その運動者のローカルの回転座標系の速度がワールド座標系の速度以上又は近しい場合は円軌道を逸脱した運動をしていると判定できるのである。その他にも、ワールド座標系とその運動者のローカルの回転座標系の二つの(力積)データを相対比較することで、色々な評価が可能となる。
5. If the speed of the local rotating coordinate system of the mover, generated from the same movement, is equal to or close to the speed in the world coordinate system, it can be determined that the movement deviates from a circular orbit. In addition, various evaluations can be made by relatively comparing the two (impulse) data of the world coordinate system and the mover's local rotating coordinate system.
[回転中心の算出]
回転座標系モデルにおける回転中心の算出の仕方を次に説明する。回転運動動作として左腕で野球のボールをこちらに向かって投球動作をしている者の背骨を直線NWとし、回転運動動作をしている者の左腕の肩LS及び右腕の肩RSを結ぶ直線、即ち左肩及び右肩を結ぶそれぞれの直線R1及び直線L1を、直線LS・RSとした図を図7に示す。
図7に示す直線NW上で、かつ直線LS・RSとの最短距離となる回転中心座標点C(xc,yc,zc)を求める。 [Calculate rotation center]
The method of calculating the center of rotation in the rotating coordinate system model will be explained next. Figure 7 shows a diagram in which the spine of a person using his left arm to pitch a baseball towards us as a rotational motion is represented as a straight line NW, and the straight lines connecting the left shoulder LS and right shoulder RS of the person making the rotational motion, that is, the straight lines R1 and L1 connecting the left shoulder and right shoulder, are represented as straight lines LS and RS.
A rotation center coordinate point C ( xc , yc , zc ) is found on the straight line NW shown in FIG. 7 and has the shortest distance from the straight lines LS and RS.
回転座標系モデルにおける回転中心の算出の仕方を次に説明する。回転運動動作として左腕で野球のボールをこちらに向かって投球動作をしている者の背骨を直線NWとし、回転運動動作をしている者の左腕の肩LS及び右腕の肩RSを結ぶ直線、即ち左肩及び右肩を結ぶそれぞれの直線R1及び直線L1を、直線LS・RSとした図を図7に示す。
図7に示す直線NW上で、かつ直線LS・RSとの最短距離となる回転中心座標点C(xc,yc,zc)を求める。 [Calculate rotation center]
The method of calculating the center of rotation in the rotating coordinate system model will be explained next. Figure 7 shows a diagram in which the spine of a person using his left arm to pitch a baseball towards us as a rotational motion is represented as a straight line NW, and the straight lines connecting the left shoulder LS and right shoulder RS of the person making the rotational motion, that is, the straight lines R1 and L1 connecting the left shoulder and right shoulder, are represented as straight lines LS and RS.
A rotation center coordinate point C ( xc , yc , zc ) is found on the straight line NW shown in FIG. 7 and has the shortest distance from the straight lines LS and RS.
直線LS・RSの単位ベクトル

を










Unit vector of straight line LS RS
of
このようにして、回転運動動作をしている者の背骨を直線NWとし、回転運動動作をしている者の左肩及び右肩を直線LS・RSとした場合の回転中心の点Cの座標が求まる。この背骨、左肩及び右肩の各部位の位置決め(すなわち上記の例であれば、直線NW、直線LS・RSの位置決め)にあたっては、実際の回転動作を撮影したものから位置決めをしてもよいし、回転動作を骨格推定やモーションキャプチャによる回転動作に置き換えたものを使用してもよい。骨格推定の例としては特許文献2に示すものがあり、モーションキャプチャの例としては特許文献3に示すものがあり、こういった技術を利用して背骨、左腕及び右腕といった回転動作の回転軸に関わる各部位の位置決めをすることができる。
In this way, the coordinates of point C, the center of rotation, are determined when the spine of the person performing the rotational movement is defined as the straight line NW, and the left and right shoulders of the person performing the rotational movement are defined as the straight lines LS and RS. When positioning each part of the spine, left and right shoulders (i.e., in the above example, positioning the straight line NW, and the straight lines LS and RS), positioning may be performed from a video of the actual rotational movement, or the rotational movement may be replaced with a rotational movement obtained by skeletal estimation or motion capture. An example of skeletal estimation is shown in Patent Document 2, and an example of motion capture is shown in Patent Document 3. Using these technologies, each part related to the axis of rotation of the rotational movement, such as the spine, left arm and right arm, can be positioned.
[ワールド座標系から回転軸座標系への変換]
次に、ワールド座標系から回転軸座標系への変換の仕方を次に説明する。回転運動動作として、左腕で野球のボールをこちらに向かって投球動作をしている者の背骨を直線NWとし、回転運動動作をしている者の左腕を直線LA、及び右肩をRSとした図を図8に示す。また、図8において、左腕の肩をLS(座標xL,yL,zL)、左腕の肘をLE(座標xE,yE,zE)とする。また、上述のようにして求めた左肩LSと右肩RSを結ぶ直線と最短距離をなす背骨上の点C座標(xC,yC,zC)を回転中心とする。この段階では座標はワールド座標系である。 [Transformation from world coordinate system to rotation axis coordinate system]
Next, a method of conversion from the world coordinate system to the rotation axis coordinate system will be explained. Fig. 8 shows a rotational motion in which the spine of a person pitching a baseball toward the viewer with his/her left arm is a straight line NW, the left arm of the person making the rotational motion is a straight line LA, and the right shoulder is RS. In Fig. 8, the shoulder of the left arm is LS (coordinates xL , yL , zL ), and the elbow of the left arm is LE (coordinates xE , yE , zE ). The center of rotation is the coordinates ( xC , yC , zC ) of point C on the spine that is the shortest distance from the straight line connecting the left shoulder LS and the right shoulder RS obtained as described above. At this stage, the coordinates are in the world coordinate system.
次に、ワールド座標系から回転軸座標系への変換の仕方を次に説明する。回転運動動作として、左腕で野球のボールをこちらに向かって投球動作をしている者の背骨を直線NWとし、回転運動動作をしている者の左腕を直線LA、及び右肩をRSとした図を図8に示す。また、図8において、左腕の肩をLS(座標xL,yL,zL)、左腕の肘をLE(座標xE,yE,zE)とする。また、上述のようにして求めた左肩LSと右肩RSを結ぶ直線と最短距離をなす背骨上の点C座標(xC,yC,zC)を回転中心とする。この段階では座標はワールド座標系である。 [Transformation from world coordinate system to rotation axis coordinate system]
Next, a method of conversion from the world coordinate system to the rotation axis coordinate system will be explained. Fig. 8 shows a rotational motion in which the spine of a person pitching a baseball toward the viewer with his/her left arm is a straight line NW, the left arm of the person making the rotational motion is a straight line LA, and the right shoulder is RS. In Fig. 8, the shoulder of the left arm is LS (coordinates xL , yL , zL ), and the elbow of the left arm is LE (coordinates xE , yE , zE ). The center of rotation is the coordinates ( xC , yC , zC ) of point C on the spine that is the shortest distance from the straight line connecting the left shoulder LS and the right shoulder RS obtained as described above. At this stage, the coordinates are in the world coordinate system.
次に、図9に示すように、回転軸座標系の座標原点を回転中心座標点Cに移動させ、左腕の肩LS及び左腕の肘LEの各部位の座標を変換する。

Next, as shown in FIG. 9, the coordinate origin of the rotation axis coordinate system is moved to the rotation center coordinate point C, and the coordinates of the shoulder LS and elbow LE of the left arm are transformed.
次に、回転中心座標点Cから左肩LSに向かうY軸回転用の単位ベクトルを求める(図10参照)。そして、単位ベクトルのオイラー角から変換行列式の三角関数を求める。

とおくと、Y軸回転変換の

となる。
Next, a unit vector for Y-axis rotation from the rotation center coordinate point C toward the left shoulder LS is obtained (see FIG. 10). Then, the trigonometric function of the transformation determinant is obtained from the Euler angles of the unit vector.
Then, the Y-axis rotation transformation
It becomes.
次に、Y軸を中心に求めた変換行列により回転させ、左腕の肩LS及び左腕の肘LEの各部位の座標を変換する(図11参照)。

Next, the coordinates of each part of the left arm's shoulder LS and left arm's elbow LE are transformed by rotating the body about the Y axis using the transformation matrix thus obtained (see FIG. 11).
次に、回転中心座標点Cから左肩LSに向かうZ軸回転用の単位ベクトルを求める(図12参照)。そして、単位ベクトルのオイラー角から変換行列式の三角関数を求める。

とおくと、Z軸回転変換の

となり、

となり、回転中心を原点とし、身体内で軸を固定した座標軸への変換が完了する。全ての記録を同一定義で変換することにより、回転座標系座標として取り扱うことが可能となる。
Next, a unit vector for Z-axis rotation from the rotation center coordinate point C toward the left shoulder LS is obtained (see FIG. 12). Then, the trigonometric function of the transformation determinant is obtained from the Euler angles of the unit vector.
Then, the Z-axis rotation transformation
And then,
This completes the transformation to a coordinate system with the center of rotation as the origin and the axes fixed within the body. By transforming all records with the same definition, it becomes possible to handle them as rotating coordinate systems.
Z軸を中心に求めた変換行列により回転させ、左腕の肩LS及び左腕の肘LEの各部位の座標を変換する。回転運動の中心座標と点LSを結ぶ直線とX軸が合致する(図13参照)。各部位毎に各時間ごとに上記変換を行い、測定データを回転座標系の座標群に変換する。
The coordinates of each part of the left arm, shoulder LS and elbow LE, are transformed by rotating around the Z axis using the transformation matrix obtained. The line connecting the center coordinate of the rotational movement and point LS coincides with the X axis (see Figure 13). The above transformation is performed for each part and each time, and the measurement data is transformed into a group of coordinates in the rotating coordinate system.
投球動作の例で言えば、首、腰、右肩、左肩、右肘、左肘のそれぞれの部位について、各時間ごとに上記変換を行い、測定データを回転座標系の座標群に変換する。
In the example of a pitching motion, the above conversion is performed for each part of the body at each time: the neck, waist, right shoulder, left shoulder, right elbow, and left elbow, and the measurement data is converted into a group of coordinates in a rotating coordinate system.
そして、回転座標系の座標群における各時間ごとの速度vを下記式に基づいて算出する。

[nは自然数]
Then, the velocity v for each time in the group of coordinates in the rotating coordinate system is calculated based on the following formula.
[n is a natural number]
上記では、実際の動作を撮影した動画データや、実際の動作に基づく骨格推定又は実際の動作に基づくモーションキャプチャなどの回転動作の場合についての回転中心の定義からの変換について説明した。上記説明での回転中心の定義は実際の回転動作に存在するいわば実在する回転中心である。
Above, we have explained the conversion from the definition of the center of rotation in the case of rotational movements such as video data of actual movements, skeletal estimation based on actual movements, or motion capture based on actual movements. The definition of the center of rotation in the above explanation is, so to speak, a real center of rotation that exists in actual rotational movements.
上記は、実際の回転動作に基づく実在する回転中心の説明をしたが、例えば、実際の動作に基づくモーションキャプチャの場合であっても、前記モーションキャプチャの種類によっては、回転動作をしている者の背骨の情報が出ないものがある。背骨の情報がないと、上記した背骨、左腕及び右腕の各部位の位置決めができない。
The above describes an actual center of rotation based on an actual rotational movement, but even in the case of motion capture based on actual movements, for example, depending on the type of motion capture, there are some cases where information about the spine of the person performing the rotational movement is not available. Without information about the spine, it is not possible to position each part of the spine, left arm, and right arm described above.
[理想回転中心]
このような背骨の情報がない場合であっても、理想回転中心を考えることで、回転中心を定義することが可能である。 [Ideal rotation center]
Even if such information about the spine is not available, it is possible to define the center of rotation by considering an ideal center of rotation.
このような背骨の情報がない場合であっても、理想回転中心を考えることで、回転中心を定義することが可能である。 [Ideal rotation center]
Even if such information about the spine is not available, it is possible to define the center of rotation by considering an ideal center of rotation.
図14に示す理想回転中心座標点Ciを、

と定義する。
The ideal rotation center coordinate point Ci shown in FIG.
It is defined as:
回転座標系モデルにおける回転中心の算出にあたっては、上記理想回転中心を使用することもできる。
The above ideal center of rotation can also be used to calculate the center of rotation in a rotating coordinate system model.
なお、最大速度近傍の理想回転中心と実際の回転中心の一致率を評価して、この時点でパフォーマンスの評価をすることもできる。
In addition, performance can be evaluated at this point by evaluating the degree of agreement between the ideal center of rotation and the actual center of rotation near the maximum speed.
[回転中心一致率]
図14に示すワールド座標系原点Oから回転中心座標点Cまでの距離を、

図14に示すワールド座標系原点Oから理想回転中心座標点Ciまでの距離を、

とすると、
回転中心座標点Cと理想回転中心座標点Ciとの中心座標一致率は、

となる。
[Rotation center coincidence rate]
The distance from the origin O of the world coordinate system to the rotation center coordinate point C shown in FIG.
The distance from the origin O of the world coordinate system to the ideal rotation center coordinate point Ci shown in FIG.
Then,
The center coordinate coincidence rate between the rotation center coordinate point C and the ideal rotation center coordinate point Ci is
It becomes.
図14に示すワールド座標系原点Oから回転中心座標点Cまでの距離を、
回転中心座標点Cと理想回転中心座標点Ciとの中心座標一致率は、
The distance from the origin O of the world coordinate system to the rotation center coordinate point C shown in FIG.
The center coordinate coincidence rate between the rotation center coordinate point C and the ideal rotation center coordinate point Ci is
回転中心一致率(1)
[最大速度発生時の回転中心と回転動作の時間毎の回転中心からみた回転中心一致率]
最大速度発生時の回転中心と回転動作の時間毎の回転中心からみた回転中心一致率は、回転動作(例えば野球の投球動作)のパフォーマンス評価に使うことができる。この回転中心一致率を見ることで、回転動作の最終加速時(例えばボールリリース時)に身体がぶれていないかを判断する為に使うことができる。回転中心がぶれていると、並進運動にもエネルギーが使われており効率が落ちると考えられるからである。この場合は、例えば野球の投球動作の場合であれば、肘もしくは手首の最大速度発生時(ボールリリース時)の回転中心を基準にして評価する。もし、実在回転中心の背骨のデータが無い場合は、各時間の中心座標に理想回転中心を代用することで、最大速度発生時の回転中心と回転動作における時間毎の回転中心からみた回転中心一致率をみることができる。即ち、最大速度発生時の回転中心と回転動作の時間毎の回転中心からみた回転中心一致率をみることで、実際の動作の効率の評価をすることができる。 Rotation center coincidence rate (1)
[Rate of coincidence between the center of rotation at maximum speed and the center of rotation at each time of rotational movement]
The rotation center coincidence rate, as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion, can be used to evaluate the performance of rotational motion (for example, pitching motion in baseball). By looking at this rotation center coincidence rate, it can be used to determine whether the body is shaking at the final acceleration of the rotational motion (for example, when the ball is released). If the center of rotation is shaking, energy is also used in the translational motion, which is thought to reduce efficiency. In this case, for example, in the case of pitching motion in baseball, the evaluation is based on the center of rotation at the time of maximum velocity of the elbow or wrist (when the ball is released). If there is no data on the spine of the actual rotation center, the rotation center coincidence rate, as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion, can be seen by substituting the ideal center of rotation for the central coordinates at each time. In other words, the efficiency of the actual motion can be evaluated by looking at the rotation center coincidence rate, as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion.
[最大速度発生時の回転中心と回転動作の時間毎の回転中心からみた回転中心一致率]
最大速度発生時の回転中心と回転動作の時間毎の回転中心からみた回転中心一致率は、回転動作(例えば野球の投球動作)のパフォーマンス評価に使うことができる。この回転中心一致率を見ることで、回転動作の最終加速時(例えばボールリリース時)に身体がぶれていないかを判断する為に使うことができる。回転中心がぶれていると、並進運動にもエネルギーが使われており効率が落ちると考えられるからである。この場合は、例えば野球の投球動作の場合であれば、肘もしくは手首の最大速度発生時(ボールリリース時)の回転中心を基準にして評価する。もし、実在回転中心の背骨のデータが無い場合は、各時間の中心座標に理想回転中心を代用することで、最大速度発生時の回転中心と回転動作における時間毎の回転中心からみた回転中心一致率をみることができる。即ち、最大速度発生時の回転中心と回転動作の時間毎の回転中心からみた回転中心一致率をみることで、実際の動作の効率の評価をすることができる。 Rotation center coincidence rate (1)
[Rate of coincidence between the center of rotation at maximum speed and the center of rotation at each time of rotational movement]
The rotation center coincidence rate, as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion, can be used to evaluate the performance of rotational motion (for example, pitching motion in baseball). By looking at this rotation center coincidence rate, it can be used to determine whether the body is shaking at the final acceleration of the rotational motion (for example, when the ball is released). If the center of rotation is shaking, energy is also used in the translational motion, which is thought to reduce efficiency. In this case, for example, in the case of pitching motion in baseball, the evaluation is based on the center of rotation at the time of maximum velocity of the elbow or wrist (when the ball is released). If there is no data on the spine of the actual rotation center, the rotation center coincidence rate, as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion, can be seen by substituting the ideal center of rotation for the central coordinates at each time. In other words, the efficiency of the actual motion can be evaluated by looking at the rotation center coincidence rate, as viewed from the center of rotation at the time of maximum velocity and the center of rotation at each time of rotational motion.
回転中心一致率(2)
[理想回転中心と実在回転中心との回転中心一致率]
また、例えば投球動作などの回転動作における胴体の回転を考えた場合、右肩と左肩を結んだ線の中点に回転中心があることが理想と考えられる。最大速度近傍の理想回転中心と実際の回転中心である実在回転中心の一致率を評価して、100%でなければ、まだその運動者(例えば投手)は、かかる回転運動の効率を向上できる余地があることになる。即ち、理想回転中心と実在回転中心との回転中心一致率をみることで、回転運動メカニクスの効率の評価をすることができる。統合すると、最大速度近傍の回転中心が理想回転中心であった場合、その投手の胴体の運動メカニクスは回転運動のベストな状態であると評価できる。なお、背骨の情報データのない運動を解析せざるを得ない場合は、上記した理想回転中心と実在回転中心との回転中心一致率をみてメカニクスの効率の評価はできない。各データの中心座標に理想回転座標を代用するためである。 Rotation center coincidence rate (2)
[Rate of agreement between ideal and actual rotation centers]
Also, when considering the rotation of the torso in a rotational motion such as pitching, it is considered ideal that the center of rotation is located at the midpoint of the line connecting the right shoulder and the left shoulder. If the agreement rate between the ideal center of rotation near the maximum speed and the real center of rotation, which is the actual center of rotation, is not 100%, the athlete (for example, a pitcher) still has room to improve the efficiency of the rotational motion. In other words, the efficiency of the rotational motion mechanics can be evaluated by looking at the agreement rate between the ideal center of rotation and the real center of rotation. In summary, if the center of rotation near the maximum speed is the ideal center of rotation, the motion mechanics of the pitcher's torso can be evaluated as being in the best state for rotational motion. Note that, if it is necessary to analyze a motion without information data on the spine, it is not possible to evaluate the efficiency of the mechanics by looking at the agreement rate between the ideal center of rotation and the real center of rotation. This is because the ideal rotation coordinates are substituted for the central coordinates of each data.
[理想回転中心と実在回転中心との回転中心一致率]
また、例えば投球動作などの回転動作における胴体の回転を考えた場合、右肩と左肩を結んだ線の中点に回転中心があることが理想と考えられる。最大速度近傍の理想回転中心と実際の回転中心である実在回転中心の一致率を評価して、100%でなければ、まだその運動者(例えば投手)は、かかる回転運動の効率を向上できる余地があることになる。即ち、理想回転中心と実在回転中心との回転中心一致率をみることで、回転運動メカニクスの効率の評価をすることができる。統合すると、最大速度近傍の回転中心が理想回転中心であった場合、その投手の胴体の運動メカニクスは回転運動のベストな状態であると評価できる。なお、背骨の情報データのない運動を解析せざるを得ない場合は、上記した理想回転中心と実在回転中心との回転中心一致率をみてメカニクスの効率の評価はできない。各データの中心座標に理想回転座標を代用するためである。 Rotation center coincidence rate (2)
[Rate of agreement between ideal and actual rotation centers]
Also, when considering the rotation of the torso in a rotational motion such as pitching, it is considered ideal that the center of rotation is located at the midpoint of the line connecting the right shoulder and the left shoulder. If the agreement rate between the ideal center of rotation near the maximum speed and the real center of rotation, which is the actual center of rotation, is not 100%, the athlete (for example, a pitcher) still has room to improve the efficiency of the rotational motion. In other words, the efficiency of the rotational motion mechanics can be evaluated by looking at the agreement rate between the ideal center of rotation and the real center of rotation. In summary, if the center of rotation near the maximum speed is the ideal center of rotation, the motion mechanics of the pitcher's torso can be evaluated as being in the best state for rotational motion. Note that, if it is necessary to analyze a motion without information data on the spine, it is not possible to evaluate the efficiency of the mechanics by looking at the agreement rate between the ideal center of rotation and the real center of rotation. This is because the ideal rotation coordinates are substituted for the central coordinates of each data.
次に、本発明の回転動作運動評価システムの一つの実施の形態を説明する。本発明の回転動作運動評価システムの一つの実施の形態のブロック図を図15に示す。
Next, an embodiment of the rotational motion evaluation system of the present invention will be described. A block diagram of an embodiment of the rotational motion evaluation system of the present invention is shown in Figure 15.
図15に示す一つの実施の形態の回転動作運動評価システム20は、サーバ30、端末装置32、通信ネットワーク34を含む構成とされている。記憶部22及び制御部26はサーバ30に格納されており、端末装置32とインターネットや社内LAN(Local Area Network)などの通信ネットワーク34で接続されている。
The rotational motion assessment system 20 of one embodiment shown in FIG. 15 includes a server 30, a terminal device 32, and a communication network 34. The memory unit 22 and the control unit 26 are stored in the server 30, and are connected to the terminal device 32 via a communication network 34 such as the Internet or an in-house LAN (Local Area Network).
端末装置32には、情報入力操作部24及び表示部28が備わっている。さらにまた、端末装置32には、入力部36、通信インターフェース38、RAM/ROM40、CPU(制御装置・演算装置)42、メモリ(主記憶装置)44、表示インターフェース46が備わっている。情報入力操作部24としては、キーボードやタッチパネルを適用でき、表示部28としては、例えば液晶ディスプレイを適用できる。端末装置32は、種々のコンピュータを使用することができるし、スマートフォンやタブレットといったモバイル端末型のコンピュータも使用することができる。
The terminal device 32 is equipped with an information input operation unit 24 and a display unit 28. Furthermore, the terminal device 32 is equipped with an input unit 36, a communication interface 38, RAM/ROM 40, a CPU (control device/arithmetic unit) 42, a memory (main storage device) 44, and a display interface 46. A keyboard or touch panel can be used as the information input operation unit 24, and an LCD display, for example, can be used as the display unit 28. The terminal device 32 can be various computers, and can also be a mobile terminal type computer such as a smartphone or tablet.
情報入力としては、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心を入力するか、又は理想回転中心を入力する。或いは、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心と理想回転中心を両方入力して回転中心を定義するようにしてもよい。前記実際の動作とは、実際の動作を動画撮影したものや、実際の動作を記録媒体に記録したもの、ライブビュー映像など、種々の実際の動作が含まれる。ここで、前記実際の動作の入力とは、例えば、実際の動作の撮影画像の入力である。実際の動作の撮影画像には、静止画も動画も含まれる。骨格推定による回転動作の入力としては、例えば実際の動作の撮影画像から骨格推定を行うアプリケーションを用いて、前記回転動作中の骨格推定の情報を入力できる。また、モーションキャプチャによる回転動作としては、例えば実際の動作の撮影画像からモーションキャプチャを行うアプリケーションを用いて、前記回転動作中のモーションキャプチャの情報を入力できる。これらは、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から実在回転中心を得ればよいもので、実在回転中心を得るにあたっては、それらの群の少なくとも一つから計算で算出することもできるし、或いはそれらの群の少なくとも一つから自動で検出したりすることもできる。なお、実在回転中心を得るにあたっては、それらの群のいずれか、例えば、実際の撮影画像や骨格推定を組み合わせて実在回転中心を得るようにしてもよい。かかる情報の入力は、情報入力操作部24から入力する。
As the information input, at least one real rotation center obtained from the group of actual movements, skeletal estimation, and rotation movements by motion capture is input, or an ideal rotation center is input. Alternatively, at least one real rotation center obtained from the group of actual movements, skeletal estimation, and rotation movements by motion capture and an ideal rotation center may be input to define the rotation center. The actual movements include various actual movements such as videos of actual movements, actual movements recorded on a recording medium, and live view images. Here, the input of the actual movements is, for example, the input of a captured image of the actual movements. The captured images of the actual movements include both still images and videos. As the input of rotation movements by skeletal estimation, for example, information on the skeletal estimation during the rotation movements can be input using an application that performs skeletal estimation from a captured image of the actual movements. Also, as the rotation movements by motion capture, for example, information on the motion capture during the rotation movements can be input using an application that performs motion capture from a captured image of the actual movements. The real center of rotation can be obtained from a group of actual movements, skeletal estimation, and rotational movements obtained by motion capture. The real center of rotation can be calculated from at least one of these groups, or can be automatically detected from at least one of these groups. Note that the real center of rotation can be obtained by combining any of these groups, for example, actual photographed images and skeletal estimation. Such information is input from the information input operation unit 24.
入力された情報に基づいて、表示部28からは回転動作運動評価が出力される。これら入力から出力まで全てプログラムで行うことが可能である。プログラムを用いて全てシステム上で行う場合、ユーザ情報の入力はID等(名前、身長、登録番号等)の入力のみで、
回転動作の撮影 → ワールド座標系データ群出力 → 回転中心検出 →回転座標系変換 → 検証
まで、全て自動で行うことができる。また、回転動作が野球のボールを投げる運動の場合、ボールを投げる方向等を検知して、左投げや右投げの定義なども自動で行うことも可能である。これらは、例えば、情報入力操作部24にカメラを設定しておけば、情報入力操作部24からユーザ情報を入力し、情報入力操作部24から画像を入力することで、入力から、評価の出力まで全てシステム上で、自動で行うことができる。
さらに、図示の例では、回転動作運動評価システム20の例を示したが、同様の構成で、プログラムを変更するだけで、回転動作運動における座標データの変換までを行う回転動作運動における座標データの変換システムとすることもできる。 Based on the input information, thedisplay unit 28 outputs the rotational movement exercise evaluation. All of this input to output can be done by a program. When using a program to do everything on the system, the only user information to be input is the ID (name, height, registration number, etc.),
All of the steps from capturing the rotational motion → outputting a world coordinate system data group → detecting the center of rotation → converting to a rotational coordinate system → verification can be done automatically. Also, if the rotational motion is the motion of throwing a baseball, it is also possible to automatically define left-handed or right-handed throwing by detecting the direction in which the ball is thrown. For example, if a camera is set in the informationinput operation unit 24, then by inputting user information from the information input operation unit 24 and inputting an image from the information input operation unit 24, all of the steps from input to output of evaluation can be done automatically on the system.
Furthermore, in the illustrated example, an example of a rotationalmovement evaluation system 20 is shown, but with a similar configuration, by simply changing the program, it can also be made into a coordinate data conversion system for rotational movement that performs conversion of coordinate data in rotational movement.
回転動作の撮影 → ワールド座標系データ群出力 → 回転中心検出 →回転座標系変換 → 検証
まで、全て自動で行うことができる。また、回転動作が野球のボールを投げる運動の場合、ボールを投げる方向等を検知して、左投げや右投げの定義なども自動で行うことも可能である。これらは、例えば、情報入力操作部24にカメラを設定しておけば、情報入力操作部24からユーザ情報を入力し、情報入力操作部24から画像を入力することで、入力から、評価の出力まで全てシステム上で、自動で行うことができる。
さらに、図示の例では、回転動作運動評価システム20の例を示したが、同様の構成で、プログラムを変更するだけで、回転動作運動における座標データの変換までを行う回転動作運動における座標データの変換システムとすることもできる。 Based on the input information, the
All of the steps from capturing the rotational motion → outputting a world coordinate system data group → detecting the center of rotation → converting to a rotational coordinate system → verification can be done automatically. Also, if the rotational motion is the motion of throwing a baseball, it is also possible to automatically define left-handed or right-handed throwing by detecting the direction in which the ball is thrown. For example, if a camera is set in the information
Furthermore, in the illustrated example, an example of a rotational
本発明のプログラムの第一の態様は、コンピュータを、回転動作運動評価システム20における各装置として機能させるためのプログラムである。即ち、本発明のプログラムの第一の態様は、コンピュータを、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義装置と、前記定義された回転中心から前記回転動作でのワールド座標系の座標データであるワールド座標系座標データを得るワールド座標系座標データ取得装置と、前記ワールド座標系座標データを、前記回転動作における人体内の回転中心を原点とする回転座標系のローカル座標データである回転座標系ローカル座標データに変換する変換装置と、前記回転動作での同一の動作から得られた、前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータの値を相対比較する相対比較装置と、を含む回転動作運動評価システムの各装置とそれぞれ機能させる。
The first aspect of the program of the present invention is a program for making a computer function as each device in a rotational motion evaluation system 20. That is, the first aspect of the program of the present invention makes a computer function as each device in a rotational motion evaluation system including a rotational center definition device that defines a rotational center from at least one real rotational center and/or ideal rotational center obtained from a group of actual movements, skeletal estimation, and rotational movements by motion capture, a world coordinate system coordinate data acquisition device that obtains world coordinate system coordinate data, which is coordinate data of the world coordinate system in the rotational movement from the defined rotational center, a conversion device that converts the world coordinate system coordinate data into rotational coordinate system local coordinate data, which is local coordinate data of a rotational coordinate system whose origin is the rotational center inside the human body in the rotational movement, and a relative comparison device that relatively compares the values of the two data, the world coordinate system coordinate data and the rotational coordinate system local coordinate data, obtained from the same movement in the rotational movement.
また、本発明のプログラムの第二の態様は、コンピュータを、座標データの変換システムにおける各装置として機能させるためのプログラムである。即ち、本発明のプログラムの第二の態様は、コンピュータを、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義装置と、前記定義された回転中心から前記回転動作での人体内の所定位置のワールド座標を時間毎に示したワールド座標系の座標データであるワールド座標系座標データを得るワールド座標系座標データ取得装置と、前記ワールド座標系座標データの中心座標を時間毎に定義する装置と、前記中心座標と所定の関節位置とを結ぶ線分に、直交座標系のうちの1軸を合致させて直交座標系データを得る装置と、前記直交座標系データを、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データに変換する変換装置と、を含む、回転動作運動における座標データの変換システムの各装置とそれぞれ機能させる。
The second aspect of the program of the present invention is a program for making a computer function as each device in a coordinate data conversion system. That is, the second aspect of the program of the present invention makes a computer function as each device in a coordinate data conversion system in a rotational motion, including a rotational center definition device that defines a rotational center from at least one real rotational center and/or ideal rotational center obtained from a group of actual motion, skeletal estimation, and rotational motion by motion capture, a world coordinate system coordinate data acquisition device that obtains world coordinate system coordinate data, which is coordinate data of the world coordinate system that indicates the world coordinates of a predetermined position in the human body in the rotational motion for each time from the defined rotational center, a device that defines the center coordinate of the world coordinate system coordinate data for each time, a device that obtains orthogonal coordinate system data by matching one axis of an orthogonal coordinate system with a line segment connecting the center coordinate and a predetermined joint position, and a conversion device that converts the orthogonal coordinate system data into local coordinate data that indicates the local coordinates of a predetermined position in the human body for each time, with the rotational center in the human body as the origin.
なお、図示例では、端末装置32とサーバ30とを通信ネットワーク34で接続した例を示したが、通信ネットワーク34を使用せずに、端末装置32に全てのプログラムを入力しておき、オフラインで、端末装置32を回転動作運動評価システムとして機能させたり、或いは、オフラインで、端末装置32を座標データの変換システムとして機能させたり、することも可能である。
In the illustrated example, the terminal device 32 and the server 30 are connected via the communication network 34, but it is also possible to input all programs into the terminal device 32 without using the communication network 34 and have the terminal device 32 function offline as a rotational motion evaluation system, or as a coordinate data conversion system.
本発明の回転動作運動評価システム20における回転動作運動評価方法の一つの実施の形態を示すフローチャートを図16に示す。図16では、骨格推定を使って実在回転中心から回転中心を定義するパターンを示している。そして、図16に示す例では、大きく分けて、回転動作運動評価システム20で骨格推定を行うパート、回転動作運動評価システム20で解析を行う解析パート、回転動作運動評価システム20で回転動作の評価を示す表示パート、というコンピュータ処理の3つのパートに分かれている。
FIG. 16 shows a flowchart illustrating one embodiment of the rotational movement evaluation method in the rotational movement evaluation system 20 of the present invention. FIG. 16 shows a pattern in which a rotation center is defined from an actual rotation center using skeletal estimation. In the example shown in FIG. 16, the computer processing is broadly divided into three parts: a part in which skeletal estimation is performed in the rotational movement evaluation system 20, an analysis part in which analysis is performed in the rotational movement evaluation system 20, and a display part in which the evaluation of the rotational movement is displayed in the rotational movement evaluation system 20.
図16のフローチャートにおける各ステップは下記の通りである。なお、図16のフローチャートはあくまでも一つの実施の形態であり、各ステップの順序やステップの削除や追加といった変更等はプログラムを変更することで可能であることは勿論である。
The steps in the flowchart in FIG. 16 are as follows. Note that the flowchart in FIG. 16 is merely one embodiment, and it goes without saying that changes such as the order of the steps or the deletion or addition of steps can be made by modifying the program.
[図16に記載のステップ(S)]
S100:<動画撮影ステップ> 実際の回転動作、例えば野球の投球動作の動画撮影が行われる。
S102:<骨格推定ステップ> S100で撮影した撮影データから骨格推定技術による骨格推定が行われる。骨格推定としては例えば、特許文献2に示されるような骨格推定技術の他、公知の種々の骨格推定技術を適用できる。
S104:<3次元座標検出ステップ> 回転動作における骨格推定から3次元座標を検出する。
S106:<3次元座標データ抽出ステップ> 検出された3次元座標データを抽出する。
S108a:<骨格イメージ挿入ステップ> 骨格イメージを挿入する。この時、S107でデータベースの骨格定義ファイルを参照する(S107:骨格定義ファイル参照ステップ)。
S110:<骨格推定動画ステップ> 骨格推定動画を表示する。ここでは、相対比較して評価するのではなく、骨格推定動画を表示して参考にする。 [Step (S) described in FIG. 16]
S100: <Video Recording Step> Video recording of an actual rotational motion, for example, a baseball pitching motion, is performed.
S102: <Skeletal Estimation Step> Skeletal estimation is performed using a skeletal estimation technique from the photographic data captured in S100. For example, the skeletal estimation technique disclosed in Japanese Patent Laid-Open No. 2003-233999 and various other known skeletal estimation techniques can be used for skeletal estimation.
S104: <Three-dimensional coordinate detection step> Three-dimensional coordinates are detected from the skeleton estimation in the rotational motion.
S106: <Three-dimensional coordinate data extraction step> The detected three-dimensional coordinate data is extracted.
S108a: <Body frame image insertion step> A body frame image is inserted. At this time, the body frame definition file in the database in S107 is referenced (S107: body frame definition file reference step).
S110: <Bone structure estimation video step> Displaying a bone structure estimation video Here, rather than performing evaluation through relative comparison, the bone structure estimation video is displayed for reference.
S100:<動画撮影ステップ> 実際の回転動作、例えば野球の投球動作の動画撮影が行われる。
S102:<骨格推定ステップ> S100で撮影した撮影データから骨格推定技術による骨格推定が行われる。骨格推定としては例えば、特許文献2に示されるような骨格推定技術の他、公知の種々の骨格推定技術を適用できる。
S104:<3次元座標検出ステップ> 回転動作における骨格推定から3次元座標を検出する。
S106:<3次元座標データ抽出ステップ> 検出された3次元座標データを抽出する。
S108a:<骨格イメージ挿入ステップ> 骨格イメージを挿入する。この時、S107でデータベースの骨格定義ファイルを参照する(S107:骨格定義ファイル参照ステップ)。
S110:<骨格推定動画ステップ> 骨格推定動画を表示する。ここでは、相対比較して評価するのではなく、骨格推定動画を表示して参考にする。 [Step (S) described in FIG. 16]
S100: <Video Recording Step> Video recording of an actual rotational motion, for example, a baseball pitching motion, is performed.
S102: <Skeletal Estimation Step> Skeletal estimation is performed using a skeletal estimation technique from the photographic data captured in S100. For example, the skeletal estimation technique disclosed in Japanese Patent Laid-Open No. 2003-233999 and various other known skeletal estimation techniques can be used for skeletal estimation.
S104: <Three-dimensional coordinate detection step> Three-dimensional coordinates are detected from the skeleton estimation in the rotational motion.
S106: <Three-dimensional coordinate data extraction step> The detected three-dimensional coordinate data is extracted.
S108a: <Body frame image insertion step> A body frame image is inserted. At this time, the body frame definition file in the database in S107 is referenced (S107: body frame definition file reference step).
S110: <Bone structure estimation video step> Displaying a bone structure estimation video Here, rather than performing evaluation through relative comparison, the bone structure estimation video is displayed for reference.
次からのステップでは、本発明の特徴的なステップであるワールド座標系から回転座標系への座標データの変換ステップを含む。
S108b:<3次元座標-時間データ取得ステップ[ワールド座標系]> ワールド座標系の3次元座標の時間毎データを取得する。
S112:<回転中心座標算出ステップ> S108bの3次元座標データから回転中心座標を算出する。この時、S111でデータベースの回転中心座標算出対象骨格定義ファイルを参照する(S111:回転中心座標算出対象骨格定義ファイル参照ステップ)。
S114:<3次元座標・回転中心座標-時間データ取得ステップ[ワールド座標系]>
ワールド座標系の3次元座標データの時間毎のデータを取得する。
S116a:<単位ベクトル算出ステップ(回転中-ターゲット関節)> 回転動作中の評価ターゲットとなる関節の単位ベクトルを算出する。
S118:<単位ベクトル及びオイラー角算出ステップ> 単位ベクトル及びオイラー角を算出する。
S120:<座標変換ステップ> 座標軸をワールド座標系から回転座標系へ変換する。
S122:<3次元座標-時間データ取得ステップ[回転座標系]> 時間毎の回転座標系の3次元座標データを取得する。
S124:<関節部位速度算出ステップ[回転座標系]> 関節部位の回転座標系での速度を算出する。
S125:<関節相対位置(直線一致率)評価ステップ[回転座標系]> 評価ターゲットとなる関節部位の回転座標系での関節相対位置(直線一致率)を評価して表示する。このステップは必要に応じて設けることができる。例えば、投球の回転動作でいえば、図7に示される背骨から右肩にかけての線R1と背骨から左肩にかけての線L1との直線一致率を評価したり、背骨から右肩にかけての線R1と背骨から左腕の線LAとの直線一致率を評価したり、することができる。これら直線一致率が高い方が、より理想に近い回転動作をしていると評価することができる。
S126:<速度-時間グラフ描画ステップ[回転座標系]> 評価ターゲットとなる関節部位の回転座標系での速度を時間毎に示したグラフを描画して表示する。
S127:<加速度-時間グラフ描画ステップ[回転座標系]> 評価ターゲットとなる関節部位の回転座標系での加速度を時間毎に示したグラフを描画して表示する。 The next step includes a step of converting coordinate data from the world coordinate system to a rotating coordinate system, which is a characteristic step of the present invention.
S108b: <Three-dimensional coordinate-time data acquisition step [world coordinate system]> Time-based data of three-dimensional coordinates in the world coordinate system is acquired.
S112: <Rotation center coordinate calculation step> The rotation center coordinate is calculated from the three-dimensional coordinate data in S108b. At this time, the rotation center coordinate calculation object skeleton definition file in the database is referenced in S111 (S111: rotation center coordinate calculation object skeleton definition file reference step).
S114: <3D coordinates/rotation center coordinates-time data acquisition step [world coordinate system]>
Three-dimensional coordinate data in the world coordinate system is acquired for each time period.
S116a: <Unit Vector Calculation Step (During Rotation--Target Joint)> A unit vector of a joint that is an evaluation target during a rotational motion is calculated.
S118: <Unit Vector and Euler Angle Calculation Step> A unit vector and an Euler angle are calculated.
S120: <Coordinate conversion step> The coordinate axes are converted from the world coordinate system to a rotating coordinate system.
S122: <Three-dimensional coordinate-time data acquisition step [rotating coordinate system]> Three-dimensional coordinate data in a rotating coordinate system for each time period is acquired.
S124: <Joint part velocity calculation step [rotating coordinate system]> The velocity of the joint part in the rotating coordinate system is calculated.
S125: <Step for evaluating relative joint position (straight line matching rate) [rotating coordinate system]> The relative joint position (straight line matching rate) of the joint part to be evaluated in the rotating coordinate system is evaluated and displayed. This step can be provided as necessary. For example, in terms of the rotational motion of pitching, the linear matching rate between the line R1 from the spine to the right shoulder and the line L1 from the spine to the left shoulder shown in FIG. 7 can be evaluated, or the linear matching rate between the line R1 from the spine to the right shoulder and the line LA from the spine to the left arm can be evaluated. It can be evaluated that the higher the linear matching rate, the closer the rotational motion is to the ideal.
S126: <Step of Drawing a Speed-Time Graph [Rotating Coordinate System]> A graph showing the speed of the joint part to be evaluated in the rotating coordinate system over time is drawn and displayed.
S127: <Acceleration-time graph drawing step [rotating coordinate system]> A graph showing the acceleration over time in the rotating coordinate system of the joint part that is the evaluation target is drawn and displayed.
S108b:<3次元座標-時間データ取得ステップ[ワールド座標系]> ワールド座標系の3次元座標の時間毎データを取得する。
S112:<回転中心座標算出ステップ> S108bの3次元座標データから回転中心座標を算出する。この時、S111でデータベースの回転中心座標算出対象骨格定義ファイルを参照する(S111:回転中心座標算出対象骨格定義ファイル参照ステップ)。
S114:<3次元座標・回転中心座標-時間データ取得ステップ[ワールド座標系]>
ワールド座標系の3次元座標データの時間毎のデータを取得する。
S116a:<単位ベクトル算出ステップ(回転中-ターゲット関節)> 回転動作中の評価ターゲットとなる関節の単位ベクトルを算出する。
S118:<単位ベクトル及びオイラー角算出ステップ> 単位ベクトル及びオイラー角を算出する。
S120:<座標変換ステップ> 座標軸をワールド座標系から回転座標系へ変換する。
S122:<3次元座標-時間データ取得ステップ[回転座標系]> 時間毎の回転座標系の3次元座標データを取得する。
S124:<関節部位速度算出ステップ[回転座標系]> 関節部位の回転座標系での速度を算出する。
S125:<関節相対位置(直線一致率)評価ステップ[回転座標系]> 評価ターゲットとなる関節部位の回転座標系での関節相対位置(直線一致率)を評価して表示する。このステップは必要に応じて設けることができる。例えば、投球の回転動作でいえば、図7に示される背骨から右肩にかけての線R1と背骨から左肩にかけての線L1との直線一致率を評価したり、背骨から右肩にかけての線R1と背骨から左腕の線LAとの直線一致率を評価したり、することができる。これら直線一致率が高い方が、より理想に近い回転動作をしていると評価することができる。
S126:<速度-時間グラフ描画ステップ[回転座標系]> 評価ターゲットとなる関節部位の回転座標系での速度を時間毎に示したグラフを描画して表示する。
S127:<加速度-時間グラフ描画ステップ[回転座標系]> 評価ターゲットとなる関節部位の回転座標系での加速度を時間毎に示したグラフを描画して表示する。 The next step includes a step of converting coordinate data from the world coordinate system to a rotating coordinate system, which is a characteristic step of the present invention.
S108b: <Three-dimensional coordinate-time data acquisition step [world coordinate system]> Time-based data of three-dimensional coordinates in the world coordinate system is acquired.
S112: <Rotation center coordinate calculation step> The rotation center coordinate is calculated from the three-dimensional coordinate data in S108b. At this time, the rotation center coordinate calculation object skeleton definition file in the database is referenced in S111 (S111: rotation center coordinate calculation object skeleton definition file reference step).
S114: <3D coordinates/rotation center coordinates-time data acquisition step [world coordinate system]>
Three-dimensional coordinate data in the world coordinate system is acquired for each time period.
S116a: <Unit Vector Calculation Step (During Rotation--Target Joint)> A unit vector of a joint that is an evaluation target during a rotational motion is calculated.
S118: <Unit Vector and Euler Angle Calculation Step> A unit vector and an Euler angle are calculated.
S120: <Coordinate conversion step> The coordinate axes are converted from the world coordinate system to a rotating coordinate system.
S122: <Three-dimensional coordinate-time data acquisition step [rotating coordinate system]> Three-dimensional coordinate data in a rotating coordinate system for each time period is acquired.
S124: <Joint part velocity calculation step [rotating coordinate system]> The velocity of the joint part in the rotating coordinate system is calculated.
S125: <Step for evaluating relative joint position (straight line matching rate) [rotating coordinate system]> The relative joint position (straight line matching rate) of the joint part to be evaluated in the rotating coordinate system is evaluated and displayed. This step can be provided as necessary. For example, in terms of the rotational motion of pitching, the linear matching rate between the line R1 from the spine to the right shoulder and the line L1 from the spine to the left shoulder shown in FIG. 7 can be evaluated, or the linear matching rate between the line R1 from the spine to the right shoulder and the line LA from the spine to the left arm can be evaluated. It can be evaluated that the higher the linear matching rate, the closer the rotational motion is to the ideal.
S126: <Step of Drawing a Speed-Time Graph [Rotating Coordinate System]> A graph showing the speed of the joint part to be evaluated in the rotating coordinate system over time is drawn and displayed.
S127: <Acceleration-time graph drawing step [rotating coordinate system]> A graph showing the acceleration over time in the rotating coordinate system of the joint part that is the evaluation target is drawn and displayed.
一方、回転座標系のローカル座標データと相対比較するためのワールド座標系データも次のステップのように取得しておく。
S116b:<関節部位速度算出ステップ[ワールド座標系]> 関節部位のワールド座標系での速度を算出する。
S128:<ターゲット関節のピーク速度(Vmax)算出ステップ[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系でのピーク速度(Vmax)を算出する。
S130:<理想回転中心算出[ワールド座標系]> 必要に応じて、理想回転中心座標を算出する。
S131:<回転中心座標一致率[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系での回転中心座標と理想回転中心座標との一致率を評価して表示する。このステップは必要に応じて設けるようにすればよい。
S132:<速度-時間グラフ描画ステップ[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系での速度を時間毎に示したグラフを描画して表示する。
S133:<加速度-時間グラフ描画ステップ[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系での加速度を時間毎に示したグラフを描画して表示する。 On the other hand, world coordinate system data for relative comparison with the local coordinate data of the rotating coordinate system is also acquired in the next step.
S116b: <Joint velocity calculation step [world coordinate system]> The velocity of the joint in the world coordinate system is calculated.
S128: <Step of calculating peak velocity (Vmax) of target joint [world coordinate system]> The peak velocity (Vmax) in the world coordinate system of the joint part that is the evaluation target is calculated.
S130: <Calculation of ideal rotation center [world coordinate system]> If necessary, the coordinates of the ideal rotation center are calculated.
S131: <Rotation center coordinate agreement rate [world coordinate system]> The agreement rate between the rotation center coordinates in the world coordinate system of the joint part to be evaluated and the ideal rotation center coordinates is evaluated and displayed. This step may be provided as necessary.
S132: <Step of Drawing a Speed-Time Graph [World Coordinate System]> A graph showing the speed of the joint portion to be evaluated in the world coordinate system over time is drawn and displayed.
S133: <Acceleration-time graph drawing step [world coordinate system]> A graph showing the acceleration of the joint part to be evaluated in the world coordinate system over time is drawn and displayed.
S116b:<関節部位速度算出ステップ[ワールド座標系]> 関節部位のワールド座標系での速度を算出する。
S128:<ターゲット関節のピーク速度(Vmax)算出ステップ[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系でのピーク速度(Vmax)を算出する。
S130:<理想回転中心算出[ワールド座標系]> 必要に応じて、理想回転中心座標を算出する。
S131:<回転中心座標一致率[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系での回転中心座標と理想回転中心座標との一致率を評価して表示する。このステップは必要に応じて設けるようにすればよい。
S132:<速度-時間グラフ描画ステップ[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系での速度を時間毎に示したグラフを描画して表示する。
S133:<加速度-時間グラフ描画ステップ[ワールド座標系]> 評価ターゲットとなる関節部位のワールド座標系での加速度を時間毎に示したグラフを描画して表示する。 On the other hand, world coordinate system data for relative comparison with the local coordinate data of the rotating coordinate system is also acquired in the next step.
S116b: <Joint velocity calculation step [world coordinate system]> The velocity of the joint in the world coordinate system is calculated.
S128: <Step of calculating peak velocity (Vmax) of target joint [world coordinate system]> The peak velocity (Vmax) in the world coordinate system of the joint part that is the evaluation target is calculated.
S130: <Calculation of ideal rotation center [world coordinate system]> If necessary, the coordinates of the ideal rotation center are calculated.
S131: <Rotation center coordinate agreement rate [world coordinate system]> The agreement rate between the rotation center coordinates in the world coordinate system of the joint part to be evaluated and the ideal rotation center coordinates is evaluated and displayed. This step may be provided as necessary.
S132: <Step of Drawing a Speed-Time Graph [World Coordinate System]> A graph showing the speed of the joint portion to be evaluated in the world coordinate system over time is drawn and displayed.
S133: <Acceleration-time graph drawing step [world coordinate system]> A graph showing the acceleration of the joint part to be evaluated in the world coordinate system over time is drawn and displayed.
次に、得られた回転座標系のローカル座標データとワールド座標系の座標データを相対比較し評価する。
S135:<相対比較評価ステップ> 得られた回転座標系のローカル座標データとワールド座標系の座標データを相対比較し評価する。この相対比較では、例えば、S126の評価ターゲットとなる人体内の所定位置、例えば関節部位の回転座標系での速度を時間毎に示したグラフと、S132の評価ターゲットとなる関節部位のワールド座標系での速度を時間毎に示したグラフとを相対比較し評価する。 Next, the obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated.
S135: <Relative comparison evaluation step> The obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated. In this relative comparison, for example, a graph showing the velocity in the rotating coordinate system of a predetermined position in the human body that is the evaluation target of S126, such as a joint, over time, is compared and evaluated with a graph showing the velocity in the world coordinate system of the joint that is the evaluation target of S132 over time.
S135:<相対比較評価ステップ> 得られた回転座標系のローカル座標データとワールド座標系の座標データを相対比較し評価する。この相対比較では、例えば、S126の評価ターゲットとなる人体内の所定位置、例えば関節部位の回転座標系での速度を時間毎に示したグラフと、S132の評価ターゲットとなる関節部位のワールド座標系での速度を時間毎に示したグラフとを相対比較し評価する。 Next, the obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated.
S135: <Relative comparison evaluation step> The obtained local coordinate data in the rotating coordinate system and the coordinate data in the world coordinate system are relatively compared and evaluated. In this relative comparison, for example, a graph showing the velocity in the rotating coordinate system of a predetermined position in the human body that is the evaluation target of S126, such as a joint, over time, is compared and evaluated with a graph showing the velocity in the world coordinate system of the joint that is the evaluation target of S132 over time.
回転座標系とワールド座標系の速度同士を相対比較して評価する基準としては、前記回転座標系ローカル座標データの最大速度が、前記ワールド座標系座標データの最大速度に対して、近しいか又はそれ以上である場合に、身体負荷が大きいと判定することができる。より具体的には、例えば、次のようなものである。
<評価:負荷が少ない>
評価ターゲットとなる関節部位のワールド座標系での最大速度を100%とすると、評価ターゲットとなる関節部位の回転座標系での最大速度が60%以下。
当該関節部位への負担は少なく、かかる投球動作を続けても故障しにくい投球動作である。
<評価:負荷が中程度>
評価ターゲットとなる関節部位のワールド座標系での最大速度を100%とすると、評価ターゲットとなる関節部位の回転座標系での最大速度が60%を超え80%以下。
当該関節部位への負担は相当程度発生していると考えられ、かかる投球動作を続けると注意が必要な投球動作である。
<評価:負荷大きい>
評価ターゲットとなる関節部位のワールド座標系での最大速度を100%とすると、評価ターゲットとなる関節部位の回転座標系での最大速度が80%を超えている。
当該関節部位への負担が大きく、かかる投球動作を続けると故障する可能性が大きい投球動作である。 As a criterion for evaluating the relative comparison between the velocities in the rotating coordinate system and the world coordinate system, if the maximum velocity of the rotating coordinate system local coordinate data is close to or greater than the maximum velocity of the world coordinate system coordinate data, it can be determined that the physical load is large.
<Evaluation: Low load>
If the maximum speed of the joint part that is the evaluation target in the world coordinate system is 100%, the maximum speed of the joint part that is the evaluation target in the rotational coordinate system is 60% or less.
This pitching motion places less strain on the joints, and is less likely to cause injury even if the pitching motion is continued.
<Evaluation: Medium load>
If the maximum speed of the joint part that is the evaluation target in the world coordinate system is 100%, the maximum speed of the joint part that is the evaluation target in the rotational coordinate system is more than 60% and is 80% or less.
It is believed that a considerable amount of strain is being placed on the joint in question, and caution is required if such a pitching motion is continued.
<Evaluation: Heavy load>
If the maximum speed of the joint part serving as the evaluation target in the world coordinate system is 100%, the maximum speed of the joint part serving as the evaluation target in the rotating coordinate system exceeds 80%.
This pitching motion places a great strain on the relevant joints, and there is a high possibility of injury if such a pitching motion is continued.
<評価:負荷が少ない>
評価ターゲットとなる関節部位のワールド座標系での最大速度を100%とすると、評価ターゲットとなる関節部位の回転座標系での最大速度が60%以下。
当該関節部位への負担は少なく、かかる投球動作を続けても故障しにくい投球動作である。
<評価:負荷が中程度>
評価ターゲットとなる関節部位のワールド座標系での最大速度を100%とすると、評価ターゲットとなる関節部位の回転座標系での最大速度が60%を超え80%以下。
当該関節部位への負担は相当程度発生していると考えられ、かかる投球動作を続けると注意が必要な投球動作である。
<評価:負荷大きい>
評価ターゲットとなる関節部位のワールド座標系での最大速度を100%とすると、評価ターゲットとなる関節部位の回転座標系での最大速度が80%を超えている。
当該関節部位への負担が大きく、かかる投球動作を続けると故障する可能性が大きい投球動作である。 As a criterion for evaluating the relative comparison between the velocities in the rotating coordinate system and the world coordinate system, if the maximum velocity of the rotating coordinate system local coordinate data is close to or greater than the maximum velocity of the world coordinate system coordinate data, it can be determined that the physical load is large.
<Evaluation: Low load>
If the maximum speed of the joint part that is the evaluation target in the world coordinate system is 100%, the maximum speed of the joint part that is the evaluation target in the rotational coordinate system is 60% or less.
This pitching motion places less strain on the joints, and is less likely to cause injury even if the pitching motion is continued.
<Evaluation: Medium load>
If the maximum speed of the joint part that is the evaluation target in the world coordinate system is 100%, the maximum speed of the joint part that is the evaluation target in the rotational coordinate system is more than 60% and is 80% or less.
It is believed that a considerable amount of strain is being placed on the joint in question, and caution is required if such a pitching motion is continued.
<Evaluation: Heavy load>
If the maximum speed of the joint part serving as the evaluation target in the world coordinate system is 100%, the maximum speed of the joint part serving as the evaluation target in the rotating coordinate system exceeds 80%.
This pitching motion places a great strain on the relevant joints, and there is a high possibility of injury if such a pitching motion is continued.
他にも、S135の相対比較評価ステップでは、例えば、S127の評価ターゲットとなる関節部位の回転座標系での加速度を時間毎に示したグラフの最大加速度と、S133の評価ターゲットとなる人体内の所定位置、例えば関節のワールド座標系での加速度を時間毎に示したグラフの最大加速度とを相対比較し、前記回転座標系の最大加速度が、前記ワールド座標系の最大加速度に対して、近しいか又はそれ以上である場合に、当該関節部位への負荷が大きいと判定することができる。その他にも、回転座標系とワールド座標系の人体内の所定位置の時間毎に示した速度のグラフの面積を相対比較して、前記回転座標系の時間毎に示した速度のグラフの面積が、前記ワールド座標系の時間毎に示した速度のグラフの面積に対して、近しいか又はそれ以上である場合に、当該人体内の所定位置、例えば関節部位への負荷が大きいと判定することができる。
また、回転座標系とワールド座標系の人体内の所定位置の変位を相対比較して、前記回転座標系の変位が、前記ワールド座標系の変位に対して、近しいか又はそれ以上である場合に、当該人体内の所定位置、例えば関節部位への負荷が大きいと判定することもできる。 In addition, in the relative comparison evaluation step of S135, for example, a maximum acceleration of a graph showing the acceleration in the rotating coordinate system of the joint part, which is the evaluation target of S127, for each time, is relatively compared with a maximum acceleration of a graph showing the acceleration in the world coordinate system of a predetermined position in the human body, for example, a joint, which is the evaluation target of S133, for each time, and if the maximum acceleration in the rotating coordinate system is close to or greater than the maximum acceleration in the world coordinate system, it can be determined that the load on the joint part is large. In addition, a relative comparison is made between the areas of the graphs of the speeds shown for each time of the rotating coordinate system and the world coordinate system of a predetermined position in the human body, and if the area of the graph of the speeds shown for each time of the rotating coordinate system is close to or greater than the area of the graph of the speeds shown for each time of the world coordinate system, it can be determined that the load on the predetermined position in the human body, for example, a joint part, is large.
In addition, by relatively comparing the displacement of a specific position within the human body in the rotating coordinate system and the world coordinate system, if the displacement in the rotating coordinate system is close to or greater than the displacement in the world coordinate system, it can be determined that the load on the specific position within the human body, such as a joint, is large.
また、回転座標系とワールド座標系の人体内の所定位置の変位を相対比較して、前記回転座標系の変位が、前記ワールド座標系の変位に対して、近しいか又はそれ以上である場合に、当該人体内の所定位置、例えば関節部位への負荷が大きいと判定することもできる。 In addition, in the relative comparison evaluation step of S135, for example, a maximum acceleration of a graph showing the acceleration in the rotating coordinate system of the joint part, which is the evaluation target of S127, for each time, is relatively compared with a maximum acceleration of a graph showing the acceleration in the world coordinate system of a predetermined position in the human body, for example, a joint, which is the evaluation target of S133, for each time, and if the maximum acceleration in the rotating coordinate system is close to or greater than the maximum acceleration in the world coordinate system, it can be determined that the load on the joint part is large. In addition, a relative comparison is made between the areas of the graphs of the speeds shown for each time of the rotating coordinate system and the world coordinate system of a predetermined position in the human body, and if the area of the graph of the speeds shown for each time of the rotating coordinate system is close to or greater than the area of the graph of the speeds shown for each time of the world coordinate system, it can be determined that the load on the predetermined position in the human body, for example, a joint part, is large.
In addition, by relatively comparing the displacement of a specific position within the human body in the rotating coordinate system and the world coordinate system, if the displacement in the rotating coordinate system is close to or greater than the displacement in the world coordinate system, it can be determined that the load on the specific position within the human body, such as a joint, is large.
本発明では、他人のデータと比べるのではなく、自分自身のデータと比べる点に特徴がある。このため、回転動作による関節の負荷などの身体負荷は個人差があるが、自分自身のデータと比べるため、いままでは、成しえなかった身体負荷を可視化、即ち数値化して、評価することが可能となったのである。また、本発明の回転動作運動評価システム及び回転動作運動評価方法は、回転動作による関節の負荷などの身体負荷の評価以外にも、前記回転座標系のデータと前記ワールド座標系のデータとを相対比較して、回転動作によるパフォーマンスを評価することもできる。
The present invention is characterized by the fact that it does not compare data with that of others, but with one's own data. Therefore, although physical loads such as the load on joints caused by rotational movements vary from person to person, by comparing with one's own data, it is now possible to visualize, i.e., quantify, and evaluate physical loads, which was not possible before. Furthermore, in addition to evaluating physical loads such as the load on joints caused by rotational movements, the rotational movement motion evaluation system and rotational movement motion evaluation method of the present invention can also evaluate performance due to rotational movements by relatively comparing the data in the rotational coordinate system with the data in the world coordinate system.
次に実施例を説明する。本発明では、回転中心は、実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心を使用してもよいし、及び/又は理想回転中心を使用しても良い。
Next, an embodiment will be described. In the present invention, the center of rotation may be at least one real center of rotation obtained from the group of actual movements, skeletal estimation, and rotation movements by motion capture, and/or an ideal center of rotation may be used.
(実施例1)
左投げの投手Aに、実際に左腕で野球のボールを投げてもらい、前記左腕で投球動作をする者を撮影した。かかる撮影動画から骨格推定に基づいて、回転中心を算出した。そして、左腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の速度を算出した。図17にワールド座標系の結果のグラフを示す。ワールド座標系の最大速度Vmaxは16.19m/secであった。図18に回転座標系の時間毎の速度の結果のグラフを示す。相対比較すると、回転座標系の時間毎の速度は、最大速度Vmaxでも前記ワールド座標系の最大速度Vmaxの16.19m/secよりもずっと遅い速度である8.67m/secであり(ワールド座標系での最大速度を100%とした場合、53.55%)、左腕の投球動作における肘への負荷は少ないと判断できる。かかる投球動作を続けても故障する可能性は少ない。
また、図19に、前記左腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の加速度を算出し、相対比較した結果を示す。前記回転座標系の最大加速度が、前記ワールド座標系の最大加速度に対して、近しくなっておらず、超えてもいないので、当該関節部位である肘への負荷は少ないと判断できる。
また、図20に、前記左腕の投球動作における肘について、ワールド座標系とローカルの回転座標系の肘に対する変位を算出し、相対比較した結果を示す。前記回転座標系の肘に対する変位が、前記ワールド座標系の肘に対する変位に対して、近しくなっておらず、超えてもいないので、当該関節部位である肘への負荷は少ないと判断できる。 Example 1
A left-handed pitcher A was actually asked to throw a baseball with his left arm, and a video of the left arm pitching was taken. The center of rotation was calculated based on skeletal estimation from the video. Then, the speed of the elbow in the left arm pitching motion was calculated for each time in the world coordinate system and the local rotating coordinate system. FIG. 17 shows a graph of the results in the world coordinate system. The maximum speed Vmax in the world coordinate system was 16.19 m/sec. FIG. 18 shows a graph of the results of the speed per time in the rotating coordinate system. In a relative comparison, the speed per time in the rotating coordinate system was 8.67 m/sec, even at the maximum speed Vmax, which is much slower than the maximum speed Vmax of the world coordinate system of 16.19 m/sec (53.55% when the maximum speed in the world coordinate system is 100%), and it can be determined that the load on the elbow in the left arm pitching motion is small. There is little possibility of injury even if such a pitching motion is continued.
19 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relative to each other for the left arm's pitching motion. Since the maximum acceleration of the rotating coordinate system is neither close to nor exceeds the maximum acceleration of the world coordinate system, it can be determined that the load on the elbow, which is the joint in question, is small.
20 shows the results of calculating and relatively comparing the displacement of the elbow in the world coordinate system and the local rotating coordinate system for the elbow during the pitching motion of the left arm. Since the displacement of the elbow in the rotating coordinate system is neither close to nor exceeds the displacement of the elbow in the world coordinate system, it can be determined that the load on the elbow, which is the joint in question, is small.
左投げの投手Aに、実際に左腕で野球のボールを投げてもらい、前記左腕で投球動作をする者を撮影した。かかる撮影動画から骨格推定に基づいて、回転中心を算出した。そして、左腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の速度を算出した。図17にワールド座標系の結果のグラフを示す。ワールド座標系の最大速度Vmaxは16.19m/secであった。図18に回転座標系の時間毎の速度の結果のグラフを示す。相対比較すると、回転座標系の時間毎の速度は、最大速度Vmaxでも前記ワールド座標系の最大速度Vmaxの16.19m/secよりもずっと遅い速度である8.67m/secであり(ワールド座標系での最大速度を100%とした場合、53.55%)、左腕の投球動作における肘への負荷は少ないと判断できる。かかる投球動作を続けても故障する可能性は少ない。
また、図19に、前記左腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の加速度を算出し、相対比較した結果を示す。前記回転座標系の最大加速度が、前記ワールド座標系の最大加速度に対して、近しくなっておらず、超えてもいないので、当該関節部位である肘への負荷は少ないと判断できる。
また、図20に、前記左腕の投球動作における肘について、ワールド座標系とローカルの回転座標系の肘に対する変位を算出し、相対比較した結果を示す。前記回転座標系の肘に対する変位が、前記ワールド座標系の肘に対する変位に対して、近しくなっておらず、超えてもいないので、当該関節部位である肘への負荷は少ないと判断できる。 Example 1
A left-handed pitcher A was actually asked to throw a baseball with his left arm, and a video of the left arm pitching was taken. The center of rotation was calculated based on skeletal estimation from the video. Then, the speed of the elbow in the left arm pitching motion was calculated for each time in the world coordinate system and the local rotating coordinate system. FIG. 17 shows a graph of the results in the world coordinate system. The maximum speed Vmax in the world coordinate system was 16.19 m/sec. FIG. 18 shows a graph of the results of the speed per time in the rotating coordinate system. In a relative comparison, the speed per time in the rotating coordinate system was 8.67 m/sec, even at the maximum speed Vmax, which is much slower than the maximum speed Vmax of the world coordinate system of 16.19 m/sec (53.55% when the maximum speed in the world coordinate system is 100%), and it can be determined that the load on the elbow in the left arm pitching motion is small. There is little possibility of injury even if such a pitching motion is continued.
19 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relative to each other for the left arm's pitching motion. Since the maximum acceleration of the rotating coordinate system is neither close to nor exceeds the maximum acceleration of the world coordinate system, it can be determined that the load on the elbow, which is the joint in question, is small.
20 shows the results of calculating and relatively comparing the displacement of the elbow in the world coordinate system and the local rotating coordinate system for the elbow during the pitching motion of the left arm. Since the displacement of the elbow in the rotating coordinate system is neither close to nor exceeds the displacement of the elbow in the world coordinate system, it can be determined that the load on the elbow, which is the joint in question, is small.
(実施例2)
次に、右投げの投手Bが、右腕で野球のボールを投げている録画映像から、骨格推定に基づいて、回転中心を算出した。そして、右腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の速度を算出した。図21にワールド座標系の結果のグラフを示す。ワールド座標系の最大速度Vmaxは16.21m/secであった。図22に回転座標系の時間毎の速度の結果のグラフを示す。相対比較すると、回転座標系の時間毎の速度の最大速度Vmaxは上記ワールド座標系のVmax 16.21m/secに近しい値に達しており、16.03m/secであった(ワールド座標系での最大速度を100%とした場合、98.89%)。このことから、かかる投球動作は肘への負荷が大きい投球動作であると判断できる。
また、図23に、前記右腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の加速度を算出し、相対比較した結果を示す。前記回転座標系の最大加速度が、前記ワールド座標系の最大加速度を超えており、当該関節部位である肘への負荷が大きい投球動作であると判断できる。
また、図24に、前記右腕の投球動作における肘について、ワールド座標系とローカルの回転座標系の肘に対する変位を算出し、相対比較した結果を示す。前記回転座標系の肘に対する変位が、前記ワールド座標系の肘に対する変位に対して超えており、当該関節部位である肘への負荷が大きい投球動作であると判断できる。 Example 2
Next, the center of rotation was calculated based on the skeleton estimation from a recorded video of right-handed pitcher B throwing a baseball with his right arm. Then, the velocity of the elbow in the pitching motion of the right arm was calculated for each time in the world coordinate system and the local rotating coordinate system. FIG. 21 shows a graph of the results in the world coordinate system. The maximum velocity Vmax in the world coordinate system was 16.21 m/sec. FIG. 22 shows a graph of the results of the velocity per time in the rotating coordinate system. In a relative comparison, the maximum velocity Vmax per time in the rotating coordinate system reached a value close to the Vmax of the world coordinate system of 16.21 m/sec, which was 16.03 m/sec (98.89% when the maximum velocity in the world coordinate system is 100%). From this, it can be determined that the pitching motion places a large load on the elbow.
23 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relatively for the right arm during the pitching motion. The maximum acceleration in the rotating coordinate system exceeds the maximum acceleration in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is the joint in question.
24 shows the results of calculating and relatively comparing the displacement of the elbow in the world coordinate system and the local rotating coordinate system in relation to the elbow during the pitching motion of the right arm. The displacement of the elbow in the rotating coordinate system exceeds the displacement of the elbow in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is a joint part.
次に、右投げの投手Bが、右腕で野球のボールを投げている録画映像から、骨格推定に基づいて、回転中心を算出した。そして、右腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の速度を算出した。図21にワールド座標系の結果のグラフを示す。ワールド座標系の最大速度Vmaxは16.21m/secであった。図22に回転座標系の時間毎の速度の結果のグラフを示す。相対比較すると、回転座標系の時間毎の速度の最大速度Vmaxは上記ワールド座標系のVmax 16.21m/secに近しい値に達しており、16.03m/secであった(ワールド座標系での最大速度を100%とした場合、98.89%)。このことから、かかる投球動作は肘への負荷が大きい投球動作であると判断できる。
また、図23に、前記右腕の投球動作における肘について、ワールド座標系とローカルの回転座標系のそれぞれ時間毎の加速度を算出し、相対比較した結果を示す。前記回転座標系の最大加速度が、前記ワールド座標系の最大加速度を超えており、当該関節部位である肘への負荷が大きい投球動作であると判断できる。
また、図24に、前記右腕の投球動作における肘について、ワールド座標系とローカルの回転座標系の肘に対する変位を算出し、相対比較した結果を示す。前記回転座標系の肘に対する変位が、前記ワールド座標系の肘に対する変位に対して超えており、当該関節部位である肘への負荷が大きい投球動作であると判断できる。 Example 2
Next, the center of rotation was calculated based on the skeleton estimation from a recorded video of right-handed pitcher B throwing a baseball with his right arm. Then, the velocity of the elbow in the pitching motion of the right arm was calculated for each time in the world coordinate system and the local rotating coordinate system. FIG. 21 shows a graph of the results in the world coordinate system. The maximum velocity Vmax in the world coordinate system was 16.21 m/sec. FIG. 22 shows a graph of the results of the velocity per time in the rotating coordinate system. In a relative comparison, the maximum velocity Vmax per time in the rotating coordinate system reached a value close to the Vmax of the world coordinate system of 16.21 m/sec, which was 16.03 m/sec (98.89% when the maximum velocity in the world coordinate system is 100%). From this, it can be determined that the pitching motion places a large load on the elbow.
23 shows the results of calculating the acceleration over time of the elbow in the world coordinate system and the local rotating coordinate system and comparing them relatively for the right arm during the pitching motion. The maximum acceleration in the rotating coordinate system exceeds the maximum acceleration in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is the joint in question.
24 shows the results of calculating and relatively comparing the displacement of the elbow in the world coordinate system and the local rotating coordinate system in relation to the elbow during the pitching motion of the right arm. The displacement of the elbow in the rotating coordinate system exceeds the displacement of the elbow in the world coordinate system, and it can be determined that this is a pitching motion that places a large load on the elbow, which is a joint part.
上記実施例では野球の投球の例を示した。本発明で言う9.8m/sec2を超える加速度の回転動作を伴う運動とは、ワールド座標系での9.8m/sec2を超える加速度の回転動作を伴う運動を指す。本発明における9.8m/sec2を超える加速度の回転動作を伴う運動には、9.8m/sec2を超える加速度の回転動作を伴う運動であればいずれも含まれる。例えば、野球、ソフトボール、サッカー、テニス、ゴルフ、バレーボール、バスケットボール、クリケット、ホッケー、ラグビー、アメリカンフットボール、ハンドボール、水球、ボウリング、ラクロス、卓球、スカッシュ、バドミントン、アイスホッケー等の飛翔体又は滑走体を扱うスポーツにおける回転動作を伴う運動等のほか、ダンスやフィギュアスケートといった回転動作を含む運動等のいずれも含まれる。また、陸上競技、水泳や飛び込み等の競技、体操競技、曲芸、エクササイズ等であっても9.8m/sec2を超える加速度の回転動作を伴う運動であれば、本発明の回転動作を伴う運動に含まれる。これら列記した運動以外にも、回転動作を伴う運動であればいずれも含まれるのは勿論である。
In the above embodiment, an example of pitching a baseball is shown. In the present invention, the movement involving a rotational motion with an acceleration of more than 9.8 m/sec 2 refers to a movement involving a rotational motion with an acceleration of more than 9.8 m/sec 2 in the world coordinate system. In the present invention, the movement involving a rotational motion with an acceleration of more than 9.8 m/sec 2 includes any movement involving a rotational motion with an acceleration of more than 9.8 m/sec 2. For example, the movement involving a rotational motion in sports using flying objects or sliding objects such as baseball, softball, soccer, tennis, golf, volleyball, basketball, cricket, hockey, rugby, American football, handball, water polo, bowling, lacrosse, table tennis, squash, badminton, ice hockey, etc., as well as any movement involving a rotational motion such as dance or figure skating, etc. are included. In addition, even if the movement involves a rotational motion with an acceleration of more than 9.8 m/sec 2 , even if the movement involves a rotational motion in athletics, swimming, diving, gymnastics, acrobatics, exercise, etc., the movement involving a rotational motion of the present invention is included. Of course, any movement involving a rotational motion other than the above listed movements is included.
野球の投球の場合には、運動における身体の回転中心は、背骨上のいずれかの場所になるが、他のスポーツにおける回転運動、例えばサッカーにおけるボールを蹴る動作では、股関節等に回転中心が来ることとなる。このように、本発明での回転動作を伴う運動における人体内の回転中心は、運動の種類によって、それぞれ異なったりするが、運動の種類に応じて、人体内の回転中心を定義すればよい。
When pitching a baseball, the center of rotation of the body during the movement is somewhere on the spine, but in rotational movements in other sports, such as kicking a ball in soccer, the center of rotation is at the hip joint, etc. In this way, the center of rotation within the human body during movements involving rotational movements in this invention will differ depending on the type of movement, but the center of rotation within the human body can be defined according to the type of movement.
本発明によれば、上述したような様々な9.8m/sec2以上の加速度の回転動作を伴う運動において、自分の回転動作の回転座標系座標データと自分の回転動作のワールド座標系データとを相対比較することで、身体の関節等に生じる身体負荷やパフォーマンス等を可視化して評価できるのである。
According to the present invention, in the above-mentioned various exercises involving rotational movements with an acceleration of 9.8 m/sec2 or more , the rotational coordinate system coordinate data of one's own rotational movement can be relatively compared with the world coordinate system data of one's own rotational movement, thereby visualizing and evaluating the physical load acting on the joints of the body, performance, etc.
10,12:骨、14:関節、16:任意の物体、18:中心、20:回転動作運動評価システム、22:記憶部、24:情報入力操作部、26:制御部、28:表示部、30:サーバ、32:端末装置、34:通信ネットワーク、36:入力部、38:通信インターフェース、40:RAM/ROM、42:CPU、44:メモリ、46:表示インターフェース。
10, 12: bones, 14: joints, 16: arbitrary object, 18: center, 20: rotational movement evaluation system, 22: memory unit, 24: information input operation unit, 26: control unit, 28: display unit, 30: server, 32: terminal device, 34: communication network, 36: input unit, 38: communication interface, 40: RAM/ROM, 42: CPU, 44: memory, 46: display interface.
Claims (13)
- 9.8m/sec2を超える加速度の回転動作を伴う運動におけるパフォーマンス及び/又は身体負荷を推定し評価する回転動作運動評価方法であって、
実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義工程と、
前記定義された回転中心から前記回転動作でのワールド座標系の座標データであるワールド座標系座標データを得る工程と、
前記ワールド座標系座標データを、前記回転動作における人体内の回転中心を原点とする回転座標系のローカル座標データである回転座標系ローカル座標データに変換する工程と、
前記回転動作での同一の動作から得られた、人体内の所定位置の前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータの値を相対比較し評価する評価工程と、
を含む、回転動作運動評価方法。 A rotational movement exercise evaluation method for estimating and evaluating performance and/or physical load in an exercise involving a rotational movement with an acceleration exceeding 9.8 m/ sec2 ,
A rotation center definition process for defining a rotation center from at least one real rotation center obtained from a group of an actual movement, a rotation movement by skeletal estimation, and a motion capture, and/or an ideal rotation center;
obtaining world coordinate system coordinate data, which is coordinate data in the world coordinate system during the rotational motion from the defined rotation center;
A step of converting the world coordinate system coordinate data into rotating coordinate system local coordinate data, which is local coordinate data of a rotating coordinate system having a rotation center within the human body as an origin during the rotational motion;
an evaluation step of relatively comparing and evaluating two data values of the world coordinate system coordinate data and the rotating coordinate system local coordinate data of a predetermined position in the human body obtained from the same rotational motion;
A rotational motion assessment method comprising: - 前記ワールド座標系座標データが、人体内の所定位置のワールド座標を時間毎に示したワールド座標データであり、
前記回転座標系ローカル座標データが、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データである、請求項1記載の回転動作運動評価方法。 the world coordinate system coordinate data is world coordinate data indicating world coordinates of a predetermined position in a human body for each time period,
2. The rotational motion evaluation method according to claim 1, wherein the rotating coordinate system local coordinate data is local coordinate data indicating local coordinates of a predetermined position within the human body for each time period, the local coordinates being taken as an origin at a center of rotation within the human body during the rotational motion. - 前記評価工程が、人体内の所定位置の時間毎に示した速度又は加速度で相対比較して評価する工程である、請求項1記載の回転動作運動評価方法。 The method for evaluating rotational motion according to claim 1, wherein the evaluation step is a step of evaluating by relative comparison the speed or acceleration shown for each time at a predetermined position in the human body.
- 前記評価が身体負荷の評価であり、
前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータが人体内の所定位置の時間毎に示した速度又は加速度に関するデータであり、
前記回転座標系ローカル座標データの最大速度又は最大加速度が、前記ワールド座標系座標データの最大速度又は最大加速度、に対して、近しいか又はそれ以上である場合に、身体負荷が大きいと判定する、請求項3記載の回転動作運動評価方法。 The evaluation is an evaluation of physical load,
The two pieces of data, the world coordinate system coordinate data and the rotation coordinate system local coordinate data, are data relating to a velocity or acceleration indicated for each time at a predetermined position in a human body,
4. The rotational motion assessment method according to claim 3, wherein the physical load is determined to be large when the maximum velocity or maximum acceleration of the rotating coordinate system local coordinate data is close to or greater than the maximum velocity or maximum acceleration of the world coordinate system coordinate data. - 前記評価が身体負荷の評価であり、
前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータが、人体内の所定位置の時間毎に示した速度のグラフの面積又は人体内の所定位置の変位に関するデータであり、
前記回転座標系ローカル座標データの人体内の所定位置の時間毎に示した速度のグラフの面積又は人体内の所定位置の変位が、
前記ワールド座標系座標データの人体内の所定位置の時間毎に示した速度のグラフの面積又は人体内の所定位置の変位、
に対して、近しいか又はそれ以上である場合に、身体負荷が大きいと判定する、請求項1記載の回転動作運動評価方法。 The evaluation is an evaluation of physical load,
the two pieces of data, the world coordinate system coordinate data and the rotating coordinate system local coordinate data, are data relating to an area of a velocity graph shown for each time at a predetermined position in the human body or data relating to a displacement of a predetermined position in the human body;
The area of a graph of the velocity of a predetermined position in the human body shown per time in the rotating coordinate system local coordinate data or the displacement of a predetermined position in the human body is
The area of a graph of the velocity of a predetermined position in the human body shown per time in the world coordinate system coordinate data or the displacement of a predetermined position in the human body,
2. The method of claim 1, wherein the physical load is determined to be large when the measured value is close to or greater than . - 前記回転中心定義工程において、前記実在回転中心と前記理想回転中心との回転中心一致率を評価する工程と、を含む、請求項1記載の回転動作運動評価方法。 The method for evaluating rotational motion as described in claim 1, further comprising a step of evaluating the rotational center coincidence rate between the actual rotational center and the ideal rotational center in the rotational center definition step.
- 請求項1記載の回転動作運動評価方法に用いられる、回転動作運動における座標データの変換方法であり、
9.8m/sec2を超える加速度の回転動作を伴う運動において、
実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義工程と、
前記定義された回転中心から前記回転動作での人体内の所定位置のワールド座標を時間毎に示したワールド座標系の座標データであるワールド座標系座標データを得る工程と、
前記ワールド座標系座標データの中心座標を時間毎に定義する工程と、
前記中心座標と所定の関節位置とを結ぶ線分に、直交座標系のうちの1軸を合致させて
直交座標系データを得る工程と、
前記直交座標系データを、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データに変換する工程と、
を含む、回転動作運動における座標データの変換方法。 A method for converting coordinate data in a rotational movement, which is used in the rotational movement evaluation method according to claim 1,
In motion involving rotational motion with an acceleration exceeding 9.8 m/ sec2 ,
A rotation center definition process for defining a rotation center from at least one real rotation center obtained from a group of an actual movement, a rotation movement by skeletal estimation, and a motion capture, and/or an ideal rotation center;
obtaining world coordinate system coordinate data which is coordinate data of a world coordinate system indicating the world coordinates of a predetermined position in the human body during the rotational movement from the defined rotation center for each time;
defining a center coordinate of the world coordinate system coordinate data for each time;
A step of obtaining orthogonal coordinate system data by matching one axis of the orthogonal coordinate system with a line segment connecting the center coordinate and a predetermined joint position;
converting the orthogonal coordinate system data into local coordinate data that indicates local coordinates of a predetermined position within the human body for each time period, the local coordinates being defined by a center of rotation within the human body during the rotational motion as an origin;
A method for converting coordinate data in a rotational motion, comprising: - 9.8m/sec2を超える加速度の回転動作を伴う運動におけるパフォーマンス及び/又は身体負荷を推定し評価する回転動作運動評価システムであって、
実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義装置と、
前記定義された回転中心から前記回転動作でのワールド座標系の座標データであるワールド座標系座標データを得るワールド座標系座標データ取得装置と、
前記ワールド座標系座標データを、前記回転動作における人体内の回転中心を原点とする回転座標系のローカル座標データである回転座標系ローカル座標データに変換する変換装置と、
前記回転動作での同一の動作から得られた、人体内の所定位置の前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータの値を相対比較する相対比較装置と、
を含む、回転動作運動評価システム。 A rotational movement exercise evaluation system that estimates and evaluates performance and/or physical load in exercise involving rotational movements with acceleration exceeding 9.8 m/ sec2 ,
A rotation center definition device that defines a rotation center from at least one real rotation center obtained from a group of an actual movement, a rotation movement by skeletal estimation, and a motion capture, and/or an ideal rotation center;
a world coordinate system coordinate data acquisition device for acquiring world coordinate system coordinate data, which is coordinate data in the world coordinate system during the rotational movement from the defined rotation center;
a conversion device for converting the world coordinate system coordinate data into rotating coordinate system local coordinate data, which is local coordinate data of a rotating coordinate system having an origin at a rotation center within the human body during the rotational motion;
a relative comparison device for relatively comparing two data values of the world coordinate system coordinate data and the rotating coordinate system local coordinate data of a predetermined position in the human body obtained by the same rotational motion;
A rotational motion assessment system comprising: - 前記ワールド座標系座標データが、人体内の所定位置のワールド座標を時間毎に示したワールド座標データであり、
前記回転座標系ローカル座標データが、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データである、請求項8記載の回転動作運動評価システム。 the world coordinate system coordinate data is world coordinate data indicating world coordinates of a predetermined position in a human body for each time period,
9. The rotational motion motion evaluation system according to claim 8, wherein the rotating coordinate system local coordinate data is local coordinate data indicating local coordinates of a predetermined position within the human body for each time period, the local coordinates being taken as an origin at a center of rotation within the human body during the rotational motion. - 前記評価が身体負荷の評価であり、
前記ワールド座標系座標データ及び前記回転座標系ローカル座標データの二つのデータが人体内の所定位置の時間毎に示した速度に関するデータであり、
前記回転座標系ローカル座標データの速度が前記ワールド座標系座標データの速度に近しいか又はそれ以上である場合に、身体負荷が大きいと判定されるようにした、請求項8記載の回転動作運動評価システム。 The evaluation is an evaluation of physical load,
The two pieces of data, the world coordinate system coordinate data and the rotational coordinate system local coordinate data, are data relating to a velocity of a predetermined position in a human body for each time period,
9. The rotational motion exercise evaluation system according to claim 8, wherein the physical load is determined to be large when the velocity of the rotational coordinate system local coordinate data is close to or greater than the velocity of the world coordinate system coordinate data. - 請求項8記載の回転動作運動評価システムに用いられる、回転動作運動における座標データの変換システムであり、
9.8m/sec2を超える加速度の回転動作を伴う運動において、
実際の動作、骨格推定及びモーションキャプチャによる回転動作の群から得られる少なくとも一つの実在回転中心、及び/又は理想回転中心から回転中心を定義する回転中心定義装置と、
前記定義された回転中心から前記回転動作での人体内の所定位置のワールド座標を時間毎に示したワールド座標系の座標データであるワールド座標系座標データを得るワールド座標系座標データ取得装置と、
前記ワールド座標系座標データの中心座標を時間毎に定義する装置と、
前記中心座標と所定の関節位置とを結ぶ線分に、直交座標系のうちの1軸を合致させて直交座標系データを得る装置と、
前記直交座標系データを、前記回転動作における人体内の回転中心を原点とする人体内の所定位置のローカル座標を時間毎に示したローカル座標データに変換する変換装置と、を含む、回転動作運動における座標データの変換システム。 A conversion system for converting coordinate data in a rotational movement, which is used in the rotational movement evaluation system according to claim 8,
In motion involving rotational motion with an acceleration exceeding 9.8 m/ sec2 ,
A rotation center definition device that defines a rotation center from at least one real rotation center obtained from a group of an actual movement, a rotation movement by skeletal estimation, and a motion capture, and/or an ideal rotation center;
a world coordinate system coordinate data acquisition device for acquiring world coordinate system coordinate data, which is coordinate data of a world coordinate system indicating the world coordinates of a predetermined position in the human body during the rotational movement from the defined rotation center for each time;
a device for defining the center coordinates of the world coordinate system coordinate data for each time;
a device for obtaining orthogonal coordinate system data by matching one axis of an orthogonal coordinate system with a line segment connecting the center coordinate and a predetermined joint position;
and a conversion device that converts the Cartesian coordinate system data into local coordinate data that indicates, for each time period, local coordinates of a predetermined position within the human body during the rotational motion, with the center of rotation within the human body as the origin. - コンピュータを、請求項8記載の回転動作運動評価システムにおける各装置として機能させるためのプログラム。 A program for causing a computer to function as each device in the rotational motion evaluation system described in claim 8.
- コンピュータを、請求項11記載の回転動作運動における座標データの変換システムにおける各装置として機能させるためのプログラム。 A program for causing a computer to function as each device in a coordinate data conversion system for rotational motion as described in claim 11.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-212108 | 2022-12-28 | ||
| JP2022212108 | 2022-12-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024142828A1 true WO2024142828A1 (en) | 2024-07-04 |
Family
ID=91717265
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/043821 WO2024142828A1 (en) | 2022-12-28 | 2023-12-07 | Rotating action motion assessment method, system, and program |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024142828A1 (en) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010014712A (en) * | 2008-06-30 | 2010-01-21 | Samsung Electronics Co Ltd | Motion capture device and motion capture method |
| JP2013138742A (en) * | 2011-12-29 | 2013-07-18 | Dunlop Sports Co Ltd | Diagnosing method of golf swing |
-
2023
- 2023-12-07 WO PCT/JP2023/043821 patent/WO2024142828A1/en unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010014712A (en) * | 2008-06-30 | 2010-01-21 | Samsung Electronics Co Ltd | Motion capture device and motion capture method |
| JP2013138742A (en) * | 2011-12-29 | 2013-07-18 | Dunlop Sports Co Ltd | Diagnosing method of golf swing |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11745055B2 (en) | Method and system for monitoring and feed-backing on execution of physical exercise routines | |
| US10456653B2 (en) | Swing quality measurement system | |
| US11833406B2 (en) | Swing quality measurement system | |
| US8175326B2 (en) | Automated scoring system for athletics | |
| US11798318B2 (en) | Detection of kinetic events and mechanical variables from uncalibrated video | |
| KR100772497B1 (en) | Golf clinic system and application method thereof | |
| JP5641222B2 (en) | Arithmetic processing device, motion analysis device, display method and program | |
| US11565163B2 (en) | Equipment fitting system that compares swing metrics | |
| Chun et al. | A sensor-aided self coaching model for uncocking improvement in golf swing | |
| Elaoud et al. | Skeleton-based comparison of throwing motion for handball players | |
| CN110751100A (en) | Auxiliary training method and system for stadium | |
| US20240248115A1 (en) | Method and system for analyzing an athletic throwing motion by an individual | |
| Kaichi et al. | Estimation of center of mass for sports scene using weighted visual hull | |
| US11577142B2 (en) | Swing analysis system that calculates a rotational profile | |
| WO2024142828A1 (en) | Rotating action motion assessment method, system, and program | |
| Kaichi et al. | Image-based center of mass estimation of the human body via 3D shape and kinematic structure | |
| Musha et al. | Reliability and validity of a deep learning algorithm based markerless motion capture system in measuring squats | |
| WO2021205843A1 (en) | Information processing device, information processing method, and imaging system | |
| Khan et al. | Weight Training Analysis of Sportsmen with Kinect Bioinformatics for Form Improvement | |
| Osawa et al. | Motion Matching Based on Pose Similarity Using Movement of Body Parts | |
| Haq et al. | 3-D Motion Analysis Of The Upper Body Of Cricket Batsman At The Execution Pull Shot | |
| Skublewska-Paszkowska | Motion Repeatability of Tennis Forehand Preparation Phase Without the Ball Using Three Dimensional Data | |
| Aihara et al. | Development of Monocular Vision-Based Tracking Method for Wheelchair Sports. | |
| Martinez et al. | Effect of Lower Extremities Position on Volleyball Attack Take-off Height | |
| WO2024057305A1 (en) | Kinematic analysis of events during playing of sports including feedback display |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23911609 Country of ref document: EP Kind code of ref document: A1 |