WO2023176039A1 - 機器診断装置及び機器診断システム - Google Patents
機器診断装置及び機器診断システム Download PDFInfo
- Publication number
- WO2023176039A1 WO2023176039A1 PCT/JP2022/042020 JP2022042020W WO2023176039A1 WO 2023176039 A1 WO2023176039 A1 WO 2023176039A1 JP 2022042020 W JP2022042020 W JP 2022042020W WO 2023176039 A1 WO2023176039 A1 WO 2023176039A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- earth leakage
- operation mode
- sensor
- leakage sensor
- load
- Prior art date
Links
- 238000003745 diagnosis Methods 0.000 claims abstract description 125
- 238000001514 detection method Methods 0.000 claims abstract description 121
- 230000005856 abnormality Effects 0.000 claims abstract description 117
- 230000005284 excitation Effects 0.000 claims description 64
- 230000035945 sensitivity Effects 0.000 claims description 31
- 238000005259 measurement Methods 0.000 claims description 24
- 238000009434 installation Methods 0.000 claims description 20
- 230000002159 abnormal effect Effects 0.000 claims description 8
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 claims description 4
- 239000000779 smoke Substances 0.000 claims description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 4
- 230000002093 peripheral effect Effects 0.000 abstract 1
- 238000012544 monitoring process Methods 0.000 description 37
- 238000010586 diagram Methods 0.000 description 34
- 238000012545 processing Methods 0.000 description 32
- 230000004907 flux Effects 0.000 description 29
- 230000004048 modification Effects 0.000 description 29
- 238000012986 modification Methods 0.000 description 29
- 230000008859 change Effects 0.000 description 22
- 238000009413 insulation Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 7
- 230000006866 deterioration Effects 0.000 description 6
- 230000035699 permeability Effects 0.000 description 6
- 230000006378 damage Effects 0.000 description 5
- 229920006395 saturated elastomer Polymers 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 238000013473 artificial intelligence Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 238000001228 spectrum Methods 0.000 description 4
- 239000000284 extract Substances 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000035882 stress Effects 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 240000006829 Ficus sundaica Species 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/50—Testing of electric apparatus, lines, cables or components for short-circuits, continuity, leakage current or incorrect line connections
- G01R31/52—Testing for short-circuits, leakage current or ground faults
Definitions
- the present disclosure relates to a device diagnostic device and a device diagnostic system.
- Load devices for example, electric motors, etc.
- load equipment When load equipment is used for a long period of time, insulation deterioration due to aging of insulating members, failure and damage of parts, etc. occur.
- a leakage current (hereinafter also referred to as "earth leakage”) flows through a location where insulation has deteriorated, it may cause an electric shock to the human body or cause a leakage sensor installed between the power supply and the load equipment (for example, an earth leakage breaker or This may cause the earth leakage relay to operate.
- a leakage sensor installed between the power supply and the load equipment (for example, an earth leakage breaker or This may cause the earth leakage relay to operate.
- the load equipment for example, an earth leakage breaker or This may cause the earth leakage relay to operate.
- a component failure or damage it takes time to perform unexpected work (specifically, arranging replacement parts, replacing parts, etc.). Therefore, there is a need for more sophisticated diagnostic equipment for load equipment.
- a zero-phase current transformer (ZCT) mounted on an earth leakage breaker or earth leakage relay is used to measure leakage current due to insulation deterioration.
- ZCT zero-phase current transformer
- a system is known that performs insulation monitoring based on voltage information and leakage information in an electric path connecting a power source and a load device (see, for example, Patent Document 1).
- An earth leakage sensor equipped with a zero-phase current transformer is, for example, a so-called passive type sensor, and measures earth leakage based on a load resistance connected to both ends of a coil wound around a magnetic core. Furthermore, in recent years, active type sensors that apply the flux gate method to detect changes in magnetic fields have also been used as leakage sensors (for example, see Patent Document 2).
- Patent Document 3 a configuration has been proposed that increases diagnostic accuracy based on signals output from a plurality of different types of sensors. Furthermore, there is also known a device that detects deterioration of load equipment and determines the presence or absence of component failure or damage based on the frequency spectrum of current detected by a current sensor (see, for example, Patent Documents 4 and 5). . Furthermore, there is also known a device that determines the presence or absence of a failure or damage in a component of a load device based on the detection result of a vibration sensor provided in the load device (for example, see Patent Document 6).
- JP 2019-109192 (see Figure 1) Special Publication No. 2013-539538 (see Figure 2) Japanese Patent Application Publication No. 2019-135455 (see Figure 5) International Publication No. 2018/087885 (see Figure 1) JP 2017-181437 (see Figure 4) JP 2021-144054 (see Figure 1)
- the detection sensitivity of an earth leakage sensor varies depending on the purpose and application of insulation monitoring, but in general, the detection sensitivity is a fixed value. Therefore, it is difficult to diagnose various events including insulation monitoring using one earth leakage sensor. Although it is possible to change the detection sensitivity by adjusting the gain of an amplifier provided after the earth leakage breaker, it is difficult to change the detection sensitivity under normal operating conditions. Further, the method of passing a test current through the leakage sensor as in Patent Document 1 is also difficult because the detection sensitivity must be changed frequently under normal operating conditions.
- the present disclosure has been made to solve the above problems, and aims to provide a device diagnostic device and a device diagnostic system that are low cost, easy to diagnose load devices, and have high reliability in the diagnosis. purpose.
- a device diagnostic device is a device diagnostic device that diagnoses a load device driven by electric power supplied from a power supply unit through an electric path, and includes a detection signal with a waveform corresponding to a current leaking from the electric path.
- an earth leakage sensor that outputs a current leakage sensor; an equipment status acquisition unit that acquires an equipment status that is at least one of the status of the load equipment or the surrounding environment of the load equipment; an operation mode determination unit that determines an operation mode of the earth leakage sensor to an operation mode for normal earth leakage detection or an operation mode for abnormality diagnosis; and an operation mode determination unit that operates the earth leakage sensor in the operation mode determined by the operation mode determination unit.
- an earth leakage sensor drive unit that performs the diagnosis based on the detection signal output from the earth leakage sensor and the status signal output from the device status acquisition unit, and the operation mode determination unit If the device state satisfies a predetermined switching condition when the earth leakage sensor is operating in the normal operation mode for earth leakage detection, the operation mode of the earth leakage sensor is changed to the abnormality diagnosis operation mode. Switch to mode.
- a device diagnostic system includes the device diagnostic device described above and a server that communicates with the device diagnostic device via a network, and the server cooperates with the diagnostic unit described above.
- the system is characterized by diagnosing load equipment that has been loaded.
- a device diagnosis device and a device diagnosis system that are low cost, easy to diagnose a load device, and have high reliability of the diagnosis.
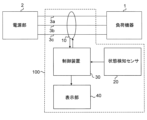
- FIG. 1 is a configuration diagram showing the configuration of a device diagnostic device according to Embodiment 1.
- FIG. FIG. 2 is a perspective view showing an example of the configuration of the earth leakage sensor shown in FIG. 1.
- FIG. FIG. 3 is a diagram showing an example of the arrangement of the earth leakage sensor shown in FIG. 2 on a power line.
- (A) is a BH curve of the magnetic core shown in FIGS. 2 and 3.
- (B) is a graph showing the waveform of the excitation magnetic field in the magnetic core when the current value of the zero-phase current is 0.
- C is a graph showing the time change of the magnetic flux passing through the magnetic core when the current value of the zero-phase current is 0.
- (D) is a graph showing the waveform of the voltage output from the detection coil when the current value of the zero-phase current is 0.
- (A) is a BH curve of the magnetic core shown in FIGS. 2 and 3.
- (B) is a graph showing the waveform of the excitation magnetic field in the magnetic core when the current value of the zero-phase current is not 0.
- (C) is a graph showing the time change of the magnetic flux passing through the magnetic core when the current value of the zero-phase current is not 0.
- (D) is a graph showing the waveform of the voltage output from the detection coil when the current value of the zero-phase current is not 0.
- 2 is a block diagram showing the configuration of a control device shown in FIG. 1.
- FIG. 2 is a block diagram showing the configuration of a device diagnostic device according to a modification of the first embodiment.
- FIG. 2 is a block diagram showing the configuration of a device diagnostic device according to a second embodiment.
- FIG. 3 is a block diagram showing another example of the configuration of the device diagnostic device according to the second embodiment.
- FIG. 7 is a diagram illustrating an example of an operation sequence of an earth leakage sensor of the device diagnostic device according to Embodiment 2; FIG.
- FIG. 3 is a block diagram showing the configuration of a device diagnosis system according to a third embodiment.
- FIG. 3 is a block diagram showing another example of the configuration of the device diagnostic system according to Embodiment 3.
- FIG. 7 is a block diagram showing the configuration of a device diagnosis system according to a modification of the third embodiment.
- FIG. 12 is a block diagram showing another example of the configuration of the device diagnosis system according to a modification of the third embodiment.
- FIG. 7 is a block diagram showing another example of the configuration of the device diagnosis system according to the fourth embodiment.
- FIG. 7 is a block diagram showing another example of the configuration of the device diagnosis system according to the fourth embodiment.
- FIG. 7 is a block diagram showing the configuration of a device diagnosis system according to a modification of the fourth embodiment.
- FIG. 7 is a block diagram showing another example of the configuration of the device diagnosis system according to a modification of the fourth embodiment.
- FIG. 1 is a configuration diagram showing the configuration of a device diagnostic apparatus 100 according to the first embodiment.
- the device diagnostic device 100 is a device that diagnoses a load device 1 driven by electric power supplied from a power supply section 2.
- the device diagnostic device 100 is an abnormality diagnostic device that diagnoses the presence or absence of an abnormality in the load device 1.
- Embodiment 1 a case where the load device 1 is driven by three-phase AC power will be described as an example.
- three-phase AC power is supplied to the load device 1 through a plurality of (for example, three or four) electric wire cables 3a, 3b, and 3c as electric circuits.
- the number of electric wires connecting the power supply section 2 and the load device 1 is two or three.
- the ground wire, earth wire, and neutral wire of the power supply section 2 may be connected to the load device 1.
- the load device 1 is, for example, an electric motor, an industrial device or an industrial machine including the electric motor, a commercial electric device, an IT (Information Technology) device, an OA (Office Automation) device, a household electric device, or a lighting device.
- Embodiment 1 will be described using an example in which the load device 1 is an electric motor.
- the device diagnostic device 100 includes one earth leakage sensor 10, a state detection sensor 20 as a device state acquisition section, a control device 30 as a control section, and a display section 40 as a notification section.
- FIG. 2 is a perspective view showing an example of the configuration of the earth leakage sensor 10 shown in FIG. 1.
- the earth leakage sensor 10 outputs a detection signal having a waveform (the sum of the currents flowing through each of the electric wire cables 3a to 3c) corresponding to the current flowing through the electric wire cables 3a to 3c. That is, if the sum of the currents flowing through each of the electric wire cables 3a to 3c does not become zero, it means that a leakage occurs in the electric circuit.
- the earth leakage sensor 10 is a so-called active type sensor.
- the leakage sensor 10 is, for example, a current sensor to which a fluxgate type magnetic sensor is applied.
- the earth leakage sensor 10 has a cylindrical magnetic core 11 as an iron core, an excitation coil 12 as a first coil, and a detection coil 13 as a second coil.
- the excitation coil 12 and the detection coil 13 are wound around the magnetic core 11 .
- the sensor drive signal is, for example, an alternating current signal.
- an alternating current hereinafter also referred to as "excitation current”
- the magnetic core 11 is periodically magnetically saturated.
- the detection coil 13 outputs a signal indicating the induced electromotive force generated when an excitation current flows through the excitation coil 12 as a detection signal.
- the earth leakage sensor 10 may be any other sensor as long as it operates based on a sensor drive signal output from the earth leakage sensor drive unit 31 (see FIG. 6).
- the earth leakage sensor 10 may be a current sensor using a highly sensitive magnetic sensor or a magnetic sensor device, or a current sensor using an optical fiber.
- FIG. 3 is a diagram showing an example of the arrangement of the earth leakage sensor 10 shown in FIG. 2 on the electric wire cables 3a to 3c.
- the earth leakage sensor 10 is arranged such that the electric wire cables 3a to 3c penetrate the hollow portion 11a of the magnetic core 11.
- the leakage sensor 10 detects a zero-phase current that is the sum of three-phase currents flowing through the wire cables 3a to 3c.
- the zero-sequence current is equivalent to the leakage current Ia flowing from the electric wire cables 3a to 3c and the load device 1 to the ground 9 via insulation resistance and stray capacitance.
- FIG. 3 shows an example in which the leakage current Ia flows from the load device 1 to the ground 9.
- the zero-sequence current will be described with the symbol I d attached thereto.
- the excitation coil 12 and the detection coil 13 are wound around a part of the magnetic core 11, and the number of turns of the excitation coil 12 is greater than the number of turns of the detection coil 13.
- An example is shown.
- the excitation coil 12 and the detection coil 13 may be evenly wound around the entire circumference of the magnetic core 11 in order to suppress uneven winding and fluctuations in output due to external magnetic fields.
- the number of turns of each of the excitation coil 12 and the detection coil 13 is not limited to the number of turns shown in FIGS. 2 and 3.
- the number of turns of the detection coil 13 may be greater than the number of turns of the excitation coil 12, or the number of turns of the excitation coil 12 may be the same as the number of turns of the detection coil 13.
- the excitation coil 12 and the detection coil 13 are wound directly around the magnetic core 11, but they are not wound around the outer surface of the resin case in which the magnetic core 11 is sealed. It's okay. This can prevent the characteristics of the magnetic core 11 from deteriorating due to winding stress, which is stress generated in the magnetic core 11 when the excitation coil 12 and the detection coil 13 are wound.
- the excitation coil 12 and the detection coil 13 are magnetically coupled via the magnetic core 11, the excitation coil 12 and the detection coil 13 may be coupled to the magnetic core 11 as a single coil. good.
- the earth leakage sensor 10 may be a clamp opening/closing type earth leakage sensor in which the cylindrical magnetic core 11 is provided with an opening/closing function.
- the earth leakage sensor 10 is connected to an earth leakage sensor drive section 31 and a first signal collection section 32 shown in FIG. 6, which will be described later. Specifically, the excitation coil 12 of the earth leakage sensor 10 is connected to the earth leakage sensor drive section 31, and the detection coil 13 is connected to the first signal collection section 32.
- FIG. 4(A) is a BH curve showing the magnetic characteristics of the magnetic core 11 shown in FIGS. 2 and 3.
- the vertical axis indicates the magnitude of the magnetic flux density B
- the horizontal axis indicates the excitation magnetic field (hereinafter referred to as "AC magnetic field H") generated when an excitation current (AC current) flows through the excitation coil 12. ).
- AC magnetic field H the excitation magnetic field generated when an excitation current (AC current) flows through the excitation coil 12.
- FIG. 4(B) is a graph showing a waveform W11 of the alternating current magnetic field H in the magnetic core 11 when the current value of the zero-sequence current Id is 0.
- the waveform W11 of the alternating current magnetic field H exhibits a positive-negative symmetrical waveform. Note that, when the number of turns of the exciting coil 12 is N 1 , the exciting current is I, and the average radius of the magnetic core 11 is r, the alternating current magnetic field H is expressed by the following equation (1).
- FIG. 4C is a graph W12 showing a temporal change in the magnetic flux ⁇ passing through the magnetic core 11 when the current value of the zero-phase current I d is 0.
- FIGS. 4A and 4C when the magnetic flux density B of the magnetic core 11 is saturated, the time change in the magnetic flux ⁇ is zero.
- FIG. 4(C) when the current value of the zero-phase current I d is 0, the magnetic flux ⁇ is negative in the period t 1 in which the time change is 0 when the magnetic flux ⁇ is positive. It is the same as the period t1 in which the time change is 0.
- the output voltage indicating the induced electromotive force generated in the detection coil 13 (see Figures 2 and 3) is set to V, and the number of turns of the detection coil 13 is set to N2 .
- the output voltage V is expressed by the following equation (2) according to Faraday's law of electromagnetic induction.
- the cross-sectional area S of the magnetic core 11 is a constant. Furthermore, when the magnetic permeability of the magnetic core 11 is ⁇ , the magnetic flux density B is the product of the magnetic permeability ⁇ and the alternating current magnetic field H, so equation (2) can be transformed into the following equation (3). .
- ⁇ 0 represents the magnetic permeability of vacuum
- ⁇ r represents the relative magnetic permeability of the magnetic core 11 .
- the vacuum magnetic permeability ⁇ 0 is, for example, 4 ⁇ 10 ⁇ 7 (H/m).
- the output voltage V is proportional to the time change of the magnetic flux ⁇ .
- the magnetic flux ⁇ is the product of the magnetic flux density B and the cross-sectional area S of the magnetic core 11, and since the cross-sectional area S is a constant, the output voltage V according to the time change of the magnetic flux density B can be obtained.
- FIG. 4(D) is a graph showing a waveform W13 of the output voltage V when the current value of the zero-phase current Id is 0.
- FIGS. 4(A), (C), and (D) when the time change of magnetic flux density B is 0, that is, when magnetic flux density B is saturated, the output voltage V is also 0. .
- the BH curve of the magnetic core 11 is symmetrical to the origin, so the period at which the output voltage V becomes 0 is twice the frequency of the alternating magnetic field H. Repeated.
- FIG. 4(A) the BH curve of the magnetic core 11 is symmetrical to the origin, so the period at which the output voltage V becomes 0 is twice the frequency of the alternating magnetic field H. Repeated.
- the interval t2 in which the output voltage V is 0 when the change in the magnetic flux ⁇ is positive is the interval t2 in which the output voltage V is 0 when the change in the magnetic flux ⁇ is negative. It is the same as the interval t2 .
- FIG. 5(A) is a graph showing the BH curve of the magnetic core 11 shown in FIGS. 2 and 3.
- the vertical axis indicates the magnitude of the magnetic flux density B
- the horizontal axis indicates the magnitude of the excitation magnetic field Hs .
- the excitation magnetic field H s is the sum of the alternating current magnetic field H generated when an excitation current flows through the excitation coil 12 and the excitation magnetic field H d described above.
- the magnetic core 11 has a magnetic flux density when the excitation magnetic field H s is set to the saturation magnetic field H 0 , ⁇ H 0 , as in FIG. 4(A). B becomes saturated.
- FIG. 5(B) is a graph showing a waveform W21 of the excitation magnetic field Hs applied to the magnetic core 11 when the current value of the zero-phase current Id is not zero.
- the zero-phase current I d is a direct current
- the excitation magnetic field H d generated by the direct current is superimposed on the alternating current magnetic field H as a direct current bias magnetic field. Therefore, as shown in FIG. 5(B), the waveform W21 of the excitation magnetic field Hs has an asymmetrical waveform.
- FIG. 5(C) is a graph W22 showing a temporal change in the magnetic flux ⁇ passing through the magnetic core 11 when the current value of the zero-phase current I d is not zero.
- the period t3 in which the time change is 0 when the magnetic flux ⁇ is positive is the period t3 when the magnetic flux ⁇ is negative. It is different from the period t4 in which the time change of is 0. This is because the waveform W21 of the excitation magnetic field Hs shown in FIG. 5 shows an asymmetric waveform of positive and negative.
- FIG. 5(D) is a graph showing a waveform W23 of the output voltage V generated in the detection coil 13 when the current value of the zero-phase current Id is not zero.
- the interval at which the output voltage V is 0 is not constant.
- the interval t5 shown in FIG. 5(D) in which the output voltage V is 0 when the change in the magnetic flux ⁇ is positive is the interval t5 when the output voltage V is 0 when the change in the magnetic flux ⁇ is negative.
- the interval t is longer than 6 .
- the change in the output voltage V shown in FIG. 5(D) is obtained at a period twice the frequency f of the excitation magnetic field Hs . Therefore, by extracting only the component (i.e., the second harmonic component) V2f corresponding to twice the frequency f of the excitation magnetic field Hs from the waveform W23 of the output voltage V shown in FIG. 5(D), The zero-sequence current I d (ie, leakage current), which is the current to be measured, can be calculated. Note that a lock-in amplifier that is synchronized with the control of the excitation magnetic field H s may be used to extract the second harmonic component V 2f .
- a bandpass filter constructed by an analog circuit or a digital filter constructed by a digital circuit may be used for extraction of the second harmonic component V 2f .
- a specific frequency component calculated by Fourier calculation may be extracted as a second harmonic component V 2f using a microcomputer.
- n is an integer of 1 or more.
- Equation (6) f indicates the frequency of the excitation magnetic field H s , H 0 indicates the saturation magnetic field of the magnetic core 11, and H m indicates the maximum value of the excitation magnetic field H s .
- the second harmonic component V 2f of the output voltage V c is proportional to the zero-sequence current I d . Furthermore, as shown in equations (7) and (8), the second harmonic component V 2f is determined by the frequency f of the excitation magnetic field H s , the number of turns N 2 of the detection coil 13, and the maximum value of the excitation magnetic field H s . It depends on H m , the saturation magnetic field H 0 of the magnetic core 11 , the relative magnetic permeability ⁇ r of the magnetic core 11 , the cross-sectional area S of the magnetic core 11 , and the like.
- equation (8) we have explained the case where the waveform of the excitation magnetic field Hs is a triangular wave as an example, but even if the waveform of the excitation magnetic field Hs is a sine wave, the coefficients are different, but the second harmonic is The parameters on which the wave component V 2f depends are the same.
- the zero-sequence current I d is a direct current current, but by adjusting the sampling conditions, even if the zero-sequence current I d is an alternating current, it can be calculated. can do.
- the sampling conditions include making the frequency of the excitation magnetic field H s more than twice the frequency of the zero-sequence current I d .
- the state detection sensor 20 acquires a physical quantity indicating the state of the load device 1 .
- the state detection sensor 20 is, for example, a vibration sensor that measures vibrations of the load device 1.
- the state detection sensor 20 may be a temperature sensor or an infrared sensor that measures the temperature of the load device 1.
- the temperature sensor or infrared sensor detects an overheated region of the load device 1.
- the state detection sensor 20 may be a motion sensor that detects movement of the load device 1.
- the state detection sensor 20 may be an electromagnetic wave sensor that detects the presence or absence of discharge in the load device 1.
- the electromagnetic wave sensor detects electromagnetic wave noise generated by discharge, for example, by having a coil or a magnetic sensor.
- the state detection sensor 20 may be an abnormal noise sensor (for example, a microphone) that detects abnormal noise (also referred to as "strange noise") when the load device 1 is operating.
- the state detection sensor 20 may be a water leakage sensor that detects the presence or absence of water leakage in the load device 1 or an oil leakage sensor that detects the presence or absence of oil leakage in the load device 1.
- the state detection sensor 20 may be a smoke sensor that detects the presence or absence of smoke in the load device 1. Note that the state detection sensor 20 may be arranged in any manner as long as it can directly or indirectly detect the state of the load device 1.
- the state detection sensor 20 as the equipment state acquisition unit may be a noise meter that detects the presence or absence of electromagnetic noise related to EMC (Electromagnetic Compatibility) in the outputs of the load equipment 1 and the power supply unit.
- the noise meter has a coil or an antenna (dipole antenna, Yagi antenna (registered trademark)) that matches the frequency of the noise, so that noise increases due to deterioration of various filters installed in the output of the load device 1 and the power supply section. and detects EMC-related electromagnetic noise propagating in space.
- the noise meter may have the function of a voltage reader that can read high frequencies.
- FIG. 6 is a block diagram showing the configuration of the control device 30 according to the first embodiment.
- the control device 30 includes an earth leakage sensor drive section 31, a first signal collection section 32, and a first signal processing section 33.
- the earth leakage sensor drive unit 31 controls the current value of the excitation current that is applied to the excitation coil 12 (see FIGS. 2 and 3), the frequency f of the excitation current, and the waveform of the excitation current. Note that the earth leakage sensor drive section 31 may control at least one of the current value of the exciting current, the frequency f of the exciting current, and the waveform of the exciting current.
- the first signal collection unit 32 is a signal input unit into which a signal indicating the output voltage output from the detection coil 13 (hereinafter also referred to as a “detection signal”) is input.
- the first signal collection unit 32 may acquire the detection signal output from the earth leakage sensor 10 in a desired signal form. For example, if the detection signal is an analog signal, the first signal collection unit 32 may convert the analog signal into a digital signal.
- the first signal processing section 33 extracts the second harmonic component of the detected voltage signal based on the detected voltage signal stored in the first signal collecting section 32 and the driving conditions of the earth leakage sensor 10 .
- the first signal processing section 33 needs to be driven according to the frequency f of the excitation current output from the leakage sensor driving section 31.
- the magnitude of the sensor output corresponding to the zero-sequence current detected by the earth leakage sensor 10 (see FIG. 1) (i.e., (current detection sensitivity) and the frequency band of the detectable zero-sequence current can be adjusted. That is, the measurement dynamic range of the leakage sensor 10 can be adjusted.
- the first signal processing unit 33 may directly measure the time change of the output voltage V c shown in FIG. You can also measure it.
- the control device 30 further includes a second signal collection section 34 and a second signal processing section 35.
- the second signal collection unit 34 is a signal input unit into which a status signal indicating the status of the load device 1 output from the status detection sensor 20 (hereinafter also referred to as "equipment status signal") is input.
- the second signal collection unit 34 may acquire the signal output from the state detection sensor 20 in a desired signal format.
- the second signal collection unit 34 may, for example, convert an analog signal output from the state detection sensor 20 into a digital signal.
- the second signal processing unit 35 extracts feature quantities from the device state signal stored in the second signal collection unit 34. For example, the second signal processing unit 35 calculates the amplitude value or effective value of the waveform of the output signal. Further, the second signal processing unit 35 may calculate a value exceeding a predetermined threshold value as a feature quantity. Furthermore, the second signal processing unit 35 may calculate the feature amount by analyzing the frequency spectrum or main frequency components.
- the current value of the leakage current flowing through the electric wire cables 3a to 3c may increase or decrease. Furthermore, the rated sensitivity current for leakage current for monitoring insulation for human body protection and fire prevention may not be able to capture changes in leakage current in response to changes in the state of load equipment 1.
- the rated sensitivity current differs depending on the purpose of insulation monitoring using the earth leakage sensor 10 or the use of the earth leakage sensor 10. For example, when the purpose of insulation monitoring is to protect the human body, a rated sensitivity current of 5 mA or 30 mA is used. Further, the current range in which the earth leakage sensor 10 performs the interrupting operation differs depending on the rating of the earth leakage sensor 10. For example, if the rated sensitivity current is 5mA, it is specified to operate within the operating current range of 4mA to 6mA, and if the rated sensitivity current is 30mA, it is specified to operate within the operating current range of 15mA to 30mA. is determined, the sensitivity of the earth leakage sensor 10 is a fixed value.
- the sensitivity can be adjusted by adjusting the gain of the amplification amplifier installed after the earth leakage sensor using the sensitivity adjustment trimmer or sensitivity adjustment dial provided on the earth leakage sensor, but under normal operating conditions, the sensitivity may be adjusted frequently. It is difficult to adjust the sensitivity to
- control device 30 further includes an operation mode determining section 36 and an abnormality determining section 37 as a diagnostic section.
- the operation mode determining unit 36 changes the operation mode of the earth leakage sensor 10 to an operation mode for earth leakage detection, which is a normal operation mode, or an operation mode for abnormality diagnosis, based on the equipment status signal output from the status detection sensor 20. decide.
- the operation mode determination unit 36 determines (sets) the operation mode of the earth leakage sensor 10 based on the feature amount of the device status signal provided via the second signal collection unit 34 and the second signal processing unit 35. .
- the operation mode determining section 36 outputs an operation mode setting signal indicating the determined operation mode to the leakage sensor driving section 31.
- the earth leakage sensor drive unit 31 sets at least one of the current value of the excitation current flowing through the excitation coil 12 (see FIGS.
- the earth leakage sensor drive unit 31 operates the earth leakage sensor 10 in the operation mode determined by the operation mode determination unit 36.
- the operating mode for detecting earth leakage during normal operation is also referred to as "normal monitoring mode", and the operating mode for abnormality diagnosis is also referred to as “abnormality diagnosis mode”.
- the "normal monitoring mode” is a mode in which the operating status of the load equipment 1 during normal times is monitored.
- the "abnormality diagnosis mode” is a mode in which the measurement dynamic range of the leakage sensor 4 is adjusted to measure the leakage current in order to diagnose the load device 1 for abnormality.
- the measurement dynamic range refers to the current detection sensitivity and frequency band of the earth leakage sensor 10.
- the measurement dynamic range of the "abnormality diagnosis mode" is wider than the measurement dynamic range of the "normal monitoring mode”.
- the measurement dynamic range when the operation mode is the "normal monitoring mode" is the first dynamic range for normal monitoring.
- detection sensitivity is low and the frequency band is narrow.
- the rated current may be set to 300 mA and the frequency may be set to 50 Hz/60 Hz.
- the measurement dynamic range when the operation mode is the "abnormality diagnosis mode" is the second dynamic range for earth leakage detection.
- the second dynamic range has high detection sensitivity and a wide frequency band.
- the second dynamic range may be set to have a rated current of 10 mA and a frequency of DC to 10 kHz.
- the earth leakage sensor drive unit 31 controls the sensor drive signal output to the excitation coil 12 (see FIG. 2).
- the measurement dynamic range of the leakage sensor 10 is set to the above-mentioned "first dynamic range.”
- the first signal processing section 33 detects the current value of the zero-sequence current based on the output signal of the detection coil 13 provided from the first signal collection section 32.
- the abnormality determination unit 37 determines whether or not there is an abnormality in the load device 1 based on the current value of the abnormal current.
- the earth leakage sensor drive unit 31 controls the sensor drive signal output to the excitation coil 12 (see FIG. 2) to detect the earth leakage.
- the measurement dynamic range of the sensor 10 is set to the above-mentioned "second dynamic range.”
- the first signal processing section 33 may extract only a specific frequency component by synchronizing the output signal of the detection coil 13 and the sensor drive signal provided from the first signal collecting section 32.
- the operation mode determining unit 36 adjusts the measurement dynamic range of the earth leakage sensor 10 by adjusting the current detection sensitivity of the earth leakage sensor 10, for example.
- the operation mode determining unit 36 may adjust the measurement dynamic range of the earth leakage sensor 10 by adjusting the frequency band of the earth leakage sensor 10. Furthermore, the operation mode determining unit 36 may adjust the measurement dynamic range of the earth leakage sensor 10 by adjusting both the current detection sensitivity and the frequency band of the earth leakage sensor 10.
- the operation mode determination unit 36 outputs a signal indicating the determination result, specifically, a signal indicating the determination result of whether or not to switch the operation mode, to the abnormality determination unit 37.
- the abnormality determination section 37 Based on the signal output from the first signal processing section 33, the signal output from the second signal processing section 35, and the signal indicating the determination result output from the operation mode determining section 36, the abnormality determination section 37 The presence or absence of an abnormality in the load device 1 is determined. In this manner, the abnormality determination unit 37 diagnoses whether or not there is an abnormality in the load device 1 based on information output from a plurality of different types of sensors. Therefore, the reliability of diagnosis by the device diagnostic device 100 can be improved. In this way, in the device diagnostic device 100, the leakage sensor 10 and the state detection sensor 20 are linked to determine whether or not there is an abnormality in the load device 1.
- the display unit 40 reports the result of the diagnosis by the abnormality determining unit 37 (that is, the result of the determination as to the presence or absence of an abnormality).
- the display unit 40 is, for example, a display that displays information indicating the determination result.
- the device diagnostic device 100 may include a safety device such as a circuit breaker, a relay, or a warning buzzer as a notification section instead of the display section 40. In this manner, the device diagnostic apparatus 100 may notify the user of the determination result in the abnormality determining section 37 by means corresponding to the operating method of the load device 1 after the abnormality diagnosis.
- each component of the device diagnostic device 100 may be either wired or wireless.
- the device diagnostic device 100 is not limited to a single state detection sensor 20, and may include a plurality of state detection sensors 20.
- the device diagnostic device 100 may include a plurality of state detection sensors 20 of different types.
- an inverter control device may be provided between the load device 1 and the power supply section 2 shown in FIG. Thereby, the device diagnostic device 100 can be applied to an electric circuit in which the frequency of three-phase alternating current can be varied. Further, the device diagnostic device 100 can be applied to an electrical circuit through which a direct current flows because the power supply section 2 is a direct current power source such as a solar cell or a fuel cell.
- FIG. 7(A) is a diagram schematically showing the hardware configuration of the device diagnostic device 100.
- the control device 30 of the device diagnostic device 100 includes, for example, a memory 30a as a storage device that stores programs as software, and an information processing system that implements the programs stored in the memory 30a.
- the processor 30b can be implemented as a unit (for example, by a computer).
- a leakage sensor 10, a state detection sensor 20, and a display unit 40 are connected to the processor 30b via a bus 30d.
- some of the components of the control device 30 may be realized by a memory 30a shown in FIG. 7(A) and a processor 30b that executes a program. Further, the control device 30 may be realized by an electric circuit.
- FIG. 7(B) is a diagram schematically showing another example of the hardware configuration of the device diagnostic device 100.
- the control device 30 may be realized using a processing circuit 30c as dedicated hardware such as a single circuit or a composite circuit. In this case, the functions of the control device 30 are realized by the processing circuit 30c.
- FIG. 8 is a flowchart showing the operation of the device diagnostic apparatus 100 according to the first embodiment. An example in which the operation mode of the earth leakage sensor 10 is switched from "normal monitoring mode” to "abnormality diagnosis mode" will be described below.
- step ST1 the earth leakage sensor drive section 31 sets the operation mode of the earth leakage sensor 10 to "normal monitoring mode.”
- step ST2 the operation mode determining unit 36 sets the measurement dynamic range of the leakage sensor 10 to the first dynamic range described above.
- step ST3 the state detection sensor 20 acquires an equipment state signal that is a signal indicating the state of the load equipment 1.
- step ST4 the second signal processing unit 35 performs signal processing (for example, conversion into a digital signal) on the device status signal provided from the status detection sensor 20.
- step ST5 the operation mode determining unit 36 determines whether the device status signal provided from the second signal processing unit 35 satisfies a predetermined switching condition.
- the operation mode determination unit 36 advances the process to step ST6.
- the operation mode determining unit 36 When the state detection sensor 20 is a vibration sensor, the operation mode determining unit 36 generates a signal corresponding to the vibration generated in the load device 1, that is, a signal corresponding to the amplitude of the speed (unit: m/s) of the load device 1. can be obtained.
- the operation mode determining unit 36 switches the operation mode of the earth leakage sensor 10 based on the signal output from the vibration sensor. For example, the operation mode determining unit 36 determines that the switching condition is satisfied when the amplitude of the signal is equal to or greater than a predetermined threshold Th, and switches the operation mode of the earth leakage sensor 10 to the "abnormality diagnosis mode". .
- the vibration sensor may detect the displacement (unit: m) or acceleration (unit: m/s 2 ) of the load device 1, and the operation mode determining unit 36 detects the displacement (or acceleration) of the load device 1. ) and the threshold Th, the operation mode of the earth leakage sensor 10 may be switched.
- the operation mode determining unit 36 compares a voltage value of 1/2 or 1/3 of the rated voltage of the earth leakage sensor 10 with the threshold Th. You can.
- the operation mode determining unit 36 is provided with a signal corresponding to the abnormal noise generated in the load device 1.
- the operation mode determining unit 36 obtains a frequency spectrum by, for example, performing frequency analysis on the signal output from the abnormal noise sensor. For example, the operation mode determining unit 36 determines that the switching condition is satisfied when the amplitude value at a specific frequency of the frequency spectrum is equal to or higher than the threshold Th, and switches the operation mode of the earth leakage sensor 10 to the "abnormality diagnosis mode". .
- the operation mode determining unit 36 may switch the operation mode of the earth leakage sensor 10 based on a specific frequency band or a plurality of frequencies.
- the operation mode determining unit 36 determines the above-mentioned It is determined that the switching conditions are not satisfied, and the process proceeds to step ST8. At this time, the operation mode determining unit 36 maintains the operation mode of the earth leakage sensor 10 in the normal monitoring mode.
- step ST6 the earth leakage sensor drive section 31 switches the operation mode of the earth leakage sensor 10 from the "normal monitoring mode” to the "abnormality diagnosis mode".
- step ST7 the operation mode determining unit 36 changes the measurement dynamic range of the earth leakage sensor 10 to the second dynamic range described above.
- step ST8 the leakage sensor 10 detects the current value of the current leaking from the electric wire cables 3a to 3c.
- step ST9 the first signal processing section 33 performs signal processing (for example, conversion into a digital signal) on the detection signal having a waveform corresponding to the current leaking from the electric wire cables 3a to 3c provided from the earth leakage sensor 10. etc.).
- signal processing for example, conversion into a digital signal
- step ST10 the abnormality determining unit 37 determines whether the load equipment 1 Determine whether an abnormality has occurred.
- the abnormality determination unit 37 determines whether or not an abnormality has occurred in the load device 1 (hereinafter also referred to as "abnormality determination") based on time series data output from each of the earth leakage sensor 10 and the state detection sensor 20. I do.
- the abnormality determination unit 37 determines whether an abnormality has occurred in the load device 1 by comparing the amplitude value of the signal waveform as time-series data output from each sensor with a threshold value. Specifically, when both the amplitude value of the signal waveform output from the earth leakage sensor 10 and the amplitude value of the signal waveform output from the state detection sensor 20 exceed a threshold value, the abnormality determination unit 37 determines that the load device 1 , it is determined that an abnormality has occurred.
- the abnormality determination unit 37 may determine whether an abnormality has occurred in the load device 1 by comparing the S/N ratio of each signal output from the leakage sensor 10 and the state detection sensor 20. For example, if it is easier to determine an abnormality based on the detection signal output from the earth leakage sensor 10 than the equipment status signal output from the status detection sensor 20, the abnormality determination unit 37 Abnormality determination may be performed by prioritizing the detection results, such as by weighting the detection results. Note that when the abnormality determination unit 37 performs abnormality determination based on the above-mentioned time series data, the abnormality determination unit 37 may perform frequency analysis processing on the time series data, and the time series data may include a signal indicating a feature amount. You may perform processing to analyze whether or not it is.
- the abnormality determination unit 37 is based on the detection signal of the earth leakage sensor 10 provided from the first signal collection unit 32 and the sensor drive signal (current value of exciting current, etc.) provided from the earth leakage sensor drive unit 31. , generate time series data of leakage current.
- the abnormality determining unit 37 determines whether there is an abnormality in the load device 1 based on two types of time series data, that is, time series data of earth leakage current and time series data of the state detection signal provided from the second signal processing unit 35. Determine whether or not this occurs.
- time series refers to a series in which values obtained by periodically measuring over time are arranged or arranged.
- step ST11 the display unit 40 displays the determination result of the abnormality determination unit 37.
- the device diagnostic device 100 includes the earth leakage sensor 10 and the state detection sensor 20 that acquires the state of the load device 1. Further, if the state of the load device 1 satisfies the switching condition while the earth leakage sensor 10 is operating in the normal monitoring mode, the operation mode determination unit 36 of the equipment diagnosis device 100 changes the operation mode of the earth leakage sensor 10 to the abnormality diagnosis mode. Switch to operating mode. Thereby, it is not necessary to frequently change the detection sensitivity of the earth leakage sensor 10 under normal operating conditions of the load device 1, so that the load device 1 can be easily diagnosed.
- monitoring of the presence or absence of electrical leakage in the load device 1 during normal operation and abnormality diagnosis for the load device 1 can be performed by adjusting the measurement dynamic range of one electrical leakage sensor 10. Therefore, since it is not necessary to provide a plurality of leakage sensors 10 with different detection sensitivities, it is possible to provide a low-cost device diagnostic device 100.
- the device diagnostic device 100 diagnoses the load device 1 based on the detection signal output from the leakage sensor 10 and the device status signal output from the status detection sensor 20. Thereby, it is possible to diagnose whether an abnormality has occurred in the load device 1 based on signals output from a plurality of types of sensors. Therefore, a highly reliable device diagnostic device 100 can be provided. Therefore, it is possible to provide a device diagnostic device 100 that is low cost, allows easy diagnosis of the load device 1, and has high reliability of the diagnosis.
- FIG. 9 is a block diagram showing the configuration of a device diagnostic apparatus 100A according to a modification of the first embodiment.
- the device diagnostic device 100A according to the modification of the first embodiment is different from the device diagnostic device 100 according to the first embodiment in that it includes a surrounding environment information acquisition section 20A as a device state acquisition section instead of the state detection sensor 20. It differs from In other respects, the device diagnostic device 100A according to the modification of the first embodiment is the same as the device diagnostic device 100 according to the first embodiment. Therefore, in the following description, reference will be made to FIG.
- the device diagnostic device 100A includes an earth leakage sensor 10, a surrounding environment information acquisition unit 20A as a device status acquisition unit, a control device 30, and a display unit 40.
- the surrounding environment information acquisition unit 20A detects surrounding environment information indicating the state of the surrounding environment of the load device 1 (see FIG. 1).
- the surrounding environment information includes, for example, at least one of the following: weather at the installation location where the load device 1 is installed, rainfall at the installation location, illuminance at the installation location, wind speed at the installation location, temperature at the installation location, and humidity at the installation location. include.
- the "installation location” includes the vicinity of the location where the load device 1 is installed.
- the surrounding environment information acquisition unit 20A is, for example, a rainfall sensor that detects the amount of rainfall at the installation location of the load device 1.
- the surrounding environment information acquisition unit 20A may be an illuminance sensor that detects the illuminance at the installation location of the load device 1, or may be a wind speed sensor that detects the wind speed at the installation location.
- the surrounding environment information acquisition unit 20A may be a temperature sensor that detects the temperature at the installation location, or a humidity sensor that detects the humidity at the installation location.
- the surrounding environment information acquisition unit 20A may, for example, access a server of a weather information providing service and acquire weather information indicating the weather at the installation location of the load device 1.
- the surrounding environment information acquisition unit 20A inputs a surrounding environment signal as a status signal indicating the surrounding environment of the load device 1 to the second signal collection unit 34. Note that the surrounding environment information acquisition unit 20A may be arranged in any manner as long as the surrounding environment of the load device 1 can be detected directly or indirectly.
- the operation mode determining unit 36 of the control device 30 determines whether the surrounding environment of the load device 1 satisfies a predetermined switching condition while the earth leakage sensor 10 is operating in the normal monitoring mode. , the operation mode of the earth leakage sensor 10 is switched to the operation mode for abnormality diagnosis. In other words, when the surrounding environment of the load device 1 satisfies the switching conditions, the operation mode determining unit 36 switches the measurement dynamic range of the earth leakage sensor 10 to the second dynamic range with high detection sensitivity.
- the operating mode determining unit 36 can also switch the measurement dynamic range of the earth leakage sensor 10 to a dynamic range with a wide frequency band. Further, when the surrounding environment of the load device 1 satisfies the operating mode switching conditions, the operating mode determining unit 36 can switch the measurement dynamic range of the earth leakage sensor 10 to a dynamic range with high detection sensitivity and a wide frequency band. .
- the abnormality determination unit 37 determines an abnormality in the load device 1 based on the time series data output from each of the earth leakage sensor 10 and the surrounding environment information acquisition unit 20A. Specifically, if the amplitude value of the signal waveform output from the earth leakage sensor 10 exceeds a threshold value and the surrounding environment information output from the surrounding environment information acquisition unit 20A satisfies predetermined conditions, an abnormality is detected. The determining unit 37 determines that an abnormality has occurred in the load device 1.
- the device diagnostic device 100A includes the earth leakage sensor 10, the surrounding environment information acquisition section 20A that obtains the surrounding environment of the load device 1, and the operation mode determining section 36.
- the operation mode determining unit 36 switches the operation mode of the earth leakage sensor 10 to an operation mode for abnormality diagnosis when the surrounding environment of the load device 1 satisfies the switching conditions.
- monitoring of the presence or absence of electrical leakage in the load device 1 during normal operation and abnormality diagnosis for the load device 1 can be performed by adjusting the measurement dynamic range of one electrical leakage sensor 10. Therefore, since it is not necessary to provide a plurality of leakage sensors 10 with different detection sensitivities, it is possible to provide a low-cost device diagnostic device 100A.
- the device diagnostic device 100A detects the load device 1 based on the detection signal output from the earth leakage sensor 10 and the surrounding environment signal output from the surrounding environment information acquisition unit 20A. Make a diagnosis. Thereby, it is possible to diagnose whether an abnormality has occurred in the load device 1 based on signals output from a plurality of types of sensors. Therefore, a highly reliable device diagnostic device 100A can be provided. Therefore, it is possible to provide a device diagnostic device 100A that is low cost, easy to diagnose the load device 1, and has high reliability of the diagnosis.
- FIG. 10 is a block diagram showing the configuration of device diagnostic device 200 according to the second embodiment.
- the operation mode determination unit of the device diagnosis device 200 according to the second embodiment is different from the device diagnosis device 100 according to the first embodiment in that the operation mode determination unit is an operation sequence determination unit 236 that determines an operation sequence indicating the order of the operation modes. do.
- the device diagnostic device 200 according to the second embodiment is the same as the device diagnostic device 100 according to the first embodiment. Therefore, in the following description, reference will be made to FIG.
- the device diagnostic device 200 includes an earth leakage sensor 10, a state detection sensor 20, a control device 230, and a display section 40.
- the control device 230 includes an earth leakage sensor drive section 31, a first signal collection section 32, a first signal processing section 33, a second signal collection section 34, a second signal processing section 35, and an operation sequence. It has a determining section 236 and an abnormality determining section 37.
- the operation sequence determination unit 236 determines the operation sequence of the earth leakage sensor 10 based on the equipment status signal indicating the status of the load equipment 1 (see FIG. 1) provided from the status detection sensor 20 via the second signal processing unit 35. decide.
- FIG. 11 is a block diagram showing another example of the configuration of the device diagnostic device 200A according to the second embodiment.
- the device diagnostic device 200A may include the surrounding environment information acquisition section 20A shown in FIG. 9 described above instead of the state detection sensor 20.
- the operation sequence determination section 236 may determine the operation sequence of the earth leakage sensor 10 based on the surrounding environment information provided from the surrounding environment information acquisition section 20A.
- FIG. 12 is a diagram showing an example of the operation sequences A to D of the earth leakage sensor 10 of the device diagnostic device 200 according to the second embodiment.
- "Operation sequence A" shown in FIG. 12 is a sequence in which two types of operation modes, a normal monitoring mode and an abnormality diagnosis mode, are executed alternately. Specifically, in the operation sequence A, when the state of the load device 1 (or the surrounding environment of the load device 1) satisfies the operation mode switching condition, the normal monitoring mode is switched to the abnormality monitoring mode. Then, when the state of the load device 1 (or the surrounding environment of the load device 1) no longer satisfies the operating mode switching conditions, the abnormality monitoring mode is switched to the normal monitoring mode.
- Operaation sequence B is a sequence that repeats "normal monitoring mode + abnormality diagnosis mode".
- Normal monitoring mode + abnormality diagnosis mode is a mode in which the normal monitoring mode and the abnormality diagnosis mode are executed simultaneously.
- “Operation sequence C” is a sequence in which the earth leakage sensor 10 is operated in the order of three types of operation modes: "normal monitoring mode”, “first abnormality diagnosis mode", and “second abnormality diagnosis mode”.
- the "first abnormality diagnosis mode” is an abnormality diagnosis mode in which the earth leakage sensor 10 is operated in the first measurement dynamic range.
- the “second abnormality diagnosis mode” is an abnormality diagnosis mode in which the earth leakage sensor 10 is operated in the second measurement dynamic range.
- the operation sequence determining unit 236 switches from the normal monitoring mode to the first abnormality diagnosis mode, from the first abnormality diagnosis mode to the second abnormality diagnosis mode, Switching from the second abnormality diagnosis mode to the normal monitoring mode is performed in order.
- the leakage sensor 10 operates in two types of abnormality diagnosis modes with different measurement dynamic ranges to detect the presence or absence of leakage in the electric wire cables 3a to 3c (see FIG. 2). This makes it easier to analyze the correlation between the device status signal (or surrounding environment information) and the detection signal output from the leakage sensor 10.
- the reliability of the device diagnostic devices 200 and 200A can be improved.
- “Operation sequence D” is a sequence that alternately executes two types of operation modes: "normal monitoring mode + first abnormality diagnosis mode” and "normal monitoring mode + second abnormality diagnosis mode".
- Normal monitoring mode + first abnormality diagnosis mode is a mode in which the normal monitoring mode and the above-described first abnormality diagnosis mode are executed simultaneously.
- normal monitoring mode + second abnormality diagnosis mode is a mode in which the normal monitoring mode and the above-mentioned second abnormality diagnosis mode are executed simultaneously.
- the number of types of operation modes that constitute the operation sequence of the earth leakage sensor 10 may be more than three types. In this way, in the second embodiment, the earth leakage sensor 10 operates in one set of two types of operation modes or three or more types of operation modes.
- the operation sequence determination unit 236 of the device diagnostic device 200 operates the earth leakage sensor 10 based on the detection result of the state detection sensor 20 and the environmental information indicating the usage environment of the load device 1. Determine the sequence. As a result, it is possible to execute a plurality of diagnostic modes, and therefore the amount of information regarding determination of abnormality diagnosis of the load device 1 can be increased. Therefore, the reliability of the device diagnostic devices 200, 200A can be improved.
- FIG. 13 is a block diagram showing the configuration of a device diagnosis system 350 according to the third embodiment.
- components that are the same as or correspond to those shown in FIGS. 1 and 6 are given the same reference numerals as those shown in FIGS. 1 and 6.
- Embodiment 3 differs from Embodiment 1 in that a server 50 communicating with device diagnostic apparatus 100 cooperates with an abnormality determination section 37 and an operation mode determination section 36.
- the third embodiment is the same as the first embodiment.
- the device diagnostic system 350 includes a device diagnostic device 100 and a server 50 that is an external server.
- the server 50 communicates with the device diagnostic device 100 via the network.
- the server 50 is, for example, a cloud server.
- the server 50 cooperates (cooperates) with the abnormality determination unit 37 to diagnose the load device 1. Further, the server 50 cooperates (cooperates) with the operation mode determination unit 36 to determine the operation mode of the earth leakage sensor 10 . Thereby, the switching conditions by the operation mode determining unit 36 can be updated based on the determination result by the abnormality determining unit 37.
- the provision of the server 50 into which information in various fields is input makes it easier to diagnose the load device 1 (see FIG. 1). By increasing the amount of information, the reliability of diagnosis of the load device 1 can be improved. Further, the server 50 can improve the reliability of diagnosis of the load device 1 by analyzing the correlation between the state detection sensor 20 and the leakage sensor 10 using artificial intelligence or the like.
- FIG. 14 is a block diagram showing another example of the configuration of the device diagnosis system 350 according to the third embodiment.
- the device diagnostic system 350 may be configured by the device diagnostic device 100A according to a modification of the first embodiment and the server 50.
- the server 50 may utilize artificial intelligence or the like to analyze the correlation between the surrounding environment information acquisition unit 20A and the leakage sensor 10.
- the device diagnostic system 350 includes the device diagnostic device 100 and the server 50 that communicates with the device diagnostic devices 100 and 100A via the network, and the server 50 includes an abnormality determination unit. 37 to diagnose the load device 1.
- the reliability of diagnosis of the load device 1 can be improved. Therefore, it is possible to provide a device diagnosis system 350 that is low cost, allows easy diagnosis of the load device 1, and has high reliability of the diagnosis.
- the server 50 determines the operation mode of the earth leakage sensor 10 in cooperation with the operation mode determination unit 36. Thereby, the operating mode switching condition by the operating mode determining unit 36 can be updated based on the determination result by the abnormality determining unit 37.
- FIG. 15 is a block diagram showing the configuration of a device diagnosis system 350A according to a modification of the third embodiment.
- components that are the same as or correspond to those shown in FIG. 10 are given the same reference numerals as those shown in FIG.
- a device diagnosis system 350A according to a modification of the third embodiment differs from the device diagnosis system 350 according to the third embodiment in that it is configured by the device diagnosis device 200 according to the second embodiment and a server 50. .
- the device diagnosis system 350A according to the modification of the third embodiment is the same as the device diagnosis system 350 according to the third embodiment.
- the device diagnostic system 350A includes a device diagnostic device 200 and a server 50.
- the server 50 communicates with the device diagnostic device 200 via the network.
- the server 50 cooperates (cooperates) with the operation sequence determination unit 236 to determine the operation sequence of the earth leakage sensor 10 .
- the operating sequence switching conditions by the operating sequence determining unit 236 can be updated based on the determination result by the abnormality determining unit 37.
- FIG. 16 is a block diagram showing another example of the configuration of a device diagnosis system 350A according to a modification of the third embodiment.
- the device diagnostic system 350A may be configured by the device diagnostic device 200A shown in FIG. 11 described above and the server 50.
- the server 50 determines the operation sequence of the earth leakage sensor 10 in cooperation with the operation sequence determination unit 236. Thereby, the operating sequence switching conditions by the operating sequence determining unit 236 can be updated based on the determination result by the abnormality determining unit 37.
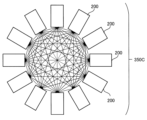
- FIG. 17 is a block diagram showing the configuration of a device diagnosis system 350B according to the fourth embodiment.
- 17 includes components that are the same as or correspond to the components shown in FIGS. 1 and 6, and the components are designated by the same reference numerals as those shown in FIGS. 1 and 6.
- Embodiment 4 is implemented in that a plurality of device diagnostic devices 100 mutually configure a network, and the plurality of device diagnostic devices 100 linked via the network determine the operations of the abnormality determination unit 37 and the operation mode determination unit 36. It is different from forms 1 and 3.
- the fourth embodiment is the same as the first and third embodiments.
- the plurality of device diagnostic devices 100 constitute the device diagnostic device 100 and a plurality of other device diagnostic device groups that communicate with the device diagnostic device 100 via a network.
- the device diagnostic system 350B includes a plurality of device diagnostic devices 100.
- the plurality of device diagnostic devices 100 communicate with each device diagnostic device 100 via a network.
- the network is, for example, a wireless network such as a mesh network.
- Each device diagnostic device 100 on the network diagnoses the load device 1 in cooperation (cooperation) with the abnormality determination unit 37 of the specific device diagnostic device 100. Similarly, each device diagnosis device 100 on the network determines the operation mode of the earth leakage sensor 10 in cooperation with the operation mode determining unit 36 of a specific device diagnosis device. Thereby, the switching conditions by the operation mode determining unit 36 can be updated based on the determination result by the abnormality determining unit 37.
- the load device 1 compared to a configuration without a network (stand-alone configuration), by utilizing the information of each device diagnostic device 100 into which information in various fields is input, the load device 1 (see FIG. 1) By increasing the amount of information for diagnosis, the reliability of diagnosis of the load device 1 can be improved.
- the reliability of the diagnosis of the load device 1 can be improved by analyzing the correlation between the condition detection sensor 20 and the earth leakage sensor 10 by utilizing artificial intelligence through distributed processing in each device diagnosis device 100 on the network. can be increased. Note that, after the diagnosis and analysis of the specific device diagnosis device 100 are completed, one of the plurality of device diagnosis devices 100 on the network is designated as the specific device diagnosis device 100, and the diagnosis and analysis are performed sequentially.
- FIG. 18 is a block diagram showing another example of the configuration of the device diagnosis system 350B according to the fourth embodiment.
- the device diagnostic system 350 may be configured by a device diagnostic device 100A (shown in FIGS. 9 and 14) according to a modification of the first embodiment.
- the correlation between the surrounding environment information acquisition unit 20A and the earth leakage sensor 10 may be analyzed by utilizing artificial intelligence or the like through distributed processing in each device diagnostic device 100A on the network.
- a plurality of device diagnostic devices 100 and 100A communicate via the network, and a plurality of device diagnostic devices 100 and 100A communicate with a specific device diagnostic device 100.
- 100A to diagnose the load device 1 in cooperation with the abnormality determination unit 37 of the load device 100A.
- the reliability of diagnosis of the load device 1 can be improved, and the system can be serverless. Therefore, it is possible to provide a device diagnosis system 350B that is low cost, can eliminate system failures caused by a single failure of a server, and can easily diagnose the load device 1 and has high reliability of the diagnosis.
- the plurality of device diagnostic devices 100, 100A determine the operating mode of the earth leakage sensor 10 in cooperation with the operation mode determining unit 36 of the specific device diagnostic device 100, 100A. Thereby, the operating mode switching condition by the operating mode determining unit 36 can be updated based on the determination result by the abnormality determining unit 37.
- FIG. 19 is a block diagram showing the configuration of a device diagnosis system 350C according to a modification of the fourth embodiment. 19 includes components that are the same as or correspond to those shown in FIG. 10, and these components are given the same reference numerals as those shown in FIG. 10.
- a device diagnostic system 350C according to a modification of the fourth embodiment differs from the device diagnostic system 350B according to the fourth embodiment in that it is configured by a plurality of device diagnostic devices 200 according to the second embodiment.
- the device diagnosis system 350C according to the modification of the fourth embodiment is the same as the device diagnosis system 350B according to the fourth embodiment.
- the device diagnostic system 350C includes a plurality of device diagnostic devices 200.
- the plurality of device diagnostic devices 200 communicate with each device diagnostic device 200 via a network.
- Each device diagnosis device 200 on the network determines the operation sequence of the earth leakage sensor 10 in cooperation with the operation sequence determination unit 236 of the specific device diagnosis device 200. Thereby, the operating sequence switching conditions by the operating sequence determining unit 236 can be updated based on the determination result by the abnormality determining unit 37.
- FIG. 20 is a block diagram showing another example of the configuration of a device diagnosis system 350C according to a modification of the fourth embodiment.
- the device diagnostic system 350C may be configured by the device diagnostic device 200A (shown in FIGS. 11 and 16) shown in FIG. 11 described above.
- a plurality of device diagnostic devices 200, 200A communicate via the network, and a plurality of device diagnostic devices 200, 200A communicate with each other via a specific device diagnostic device 200, 200A.
- the operation sequence of the earth leakage sensor 10 is determined in cooperation with the operation sequence determination unit 236. Thereby, the operating sequence switching conditions by the operating sequence determining unit 236 can be updated based on the determination result by the abnormality determining unit 37.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Testing Of Short-Circuits, Discontinuities, Leakage, Or Incorrect Line Connections (AREA)
Abstract
機器診断装置(100)は、漏電センサ(10)と、負荷機器(1)の状態又は負荷機器(1)の周辺環境の少なくとも一方である機器状態を取得する機器状態取得部(20)と、機器状態取得部(20)から出力される状態信号に基づいて漏電センサ(10)の動作モードを、通常時の漏電検出用の動作モード又は異常診断用の動作モードに決定する動作モード決定部(36)と、漏電センサ駆動部(31)と、漏電センサ(10)から出力される検出信号と機器状態取得部(20)から出力される状態信号とに基づいて負荷機器(1)の診断を行う診断部(37)とを有し、動作モード決定部(36)は、機器状態が切替条件を満たす場合、漏電センサ(10)の動作モードを異常診断用の動作モードに切り替える。
Description
本開示は、機器診断装置及び機器診断システムに関する。
電源から供給される電力によって駆動する負荷機器(例えば、電動機など)が、広く普及している。負荷機器が長期間使用された場合、絶縁部材の経年劣化による絶縁劣化、部品の故障及び損傷などが発生する。
絶縁劣化が生じた箇所に漏洩電流(以下、「漏電」とも呼ぶ。)が流れると、人体への感電の発生又は電源と負荷機器との間に設けられた漏電センサ(例えば、漏電遮断器又は漏電リレー)が作動する要因となる。この場合、緊急の点検又は安全確保のために、負荷機器への電力の供給を停止して、漏電の発生原因及び漏電の発生箇所を特定する必要がある。また、部品の故障及び損傷が発生した場合には、突発的な作業(具体的には、交換部品の手配及び部品の交換作業など)にも時間を要する。そのため、負荷機器の診断装置の高度化が求められている。
一般的に、絶縁劣化に伴う漏洩電流の測定には、漏電遮断器又は漏電リレーに搭載された零相変流器(ZCT:Zero-phase Current Transfomer)が用いられる。また、電源と負荷機器とを繋ぐ電路における電圧情報及び漏電情報に基づいて絶縁監視を行うシステムが知られている(例えば、特許文献1を参照)。
零相変流器を搭載した漏電センサは、例えば、いわゆるパッシブ方式のセンサであり、磁性体コアに巻き付けられたコイルの両端に接続された負荷抵抗に基づいて漏電を計測する。また、近年では、漏電センサとして、磁場の変化を検出するフラックスゲート法を応用したアクティブ方式のセンサも用いられている(例えば、特許文献2を参照)。
また、電力設備における絶縁劣化を検出するために、種類の異なる複数のセンサから出力される信号に基づいて診断精度を高める構成が提案されている(例えば、特許文献3を参照)。また、電流センサによって検出された電流の周波数スペクトルに基づいて、負荷機器の劣化の検出及び部品の故障又は損傷の有無を判定する装置も知られている(例えば、特許文献4及び5を参照)。更に、負荷機器に備えられた振動センサの検出結果に基づいて当該負荷機器の部品における故障又は損傷の有無を判定する装置も知られている(例えば、特許文献6を参照)。
負荷機器の絶縁劣化及び負荷機器の部品の故障又は損傷など、様々な判定を1つのセンサによって計測することは容易ではないため、センサ・フュージョンの技術の重要性が高まっている。漏電センサの検出感度は絶縁監視を行う目的及び用途に応じて異なるが、一般的に、検出感度は固定値である。そのため、1つの漏電センサによって、絶縁監視を含む様々な事象を診断することは困難である。漏電遮断器の後段に設けられた増幅アンプのゲインを調整することで検出感度を変更する方法も考えられるが、通常の運転状況下において検出感度を変更することは困難である。また、特許文献1のように漏電センサにテスト電流を流す方法も、通常の運転状況下において検出感度を頻繁に変えることになるため、困難である。
また、特許文献3のように、検出感度が異なる複数の漏電センサを装置に配置する場合、コストが増大する。更に、負荷機器の異常と漏電センサの出力信号との相関関係が判明していない場合にも、漏電センサの個数を増加させる必要があり、コストが増大する。また、当該相関関係のデータベースを作る場合にもコストが増大する。
本開示は、上記課題を解決するためになされたものであり、低コストであって、負荷機器の診断が容易で且つ当該診断の信頼性が高い機器診断装置及び機器診断システムを提供することを目的とする。
本開示の一態様に係る機器診断装置は、電源部から電路を通して供給される電力によって駆動する負荷機器の診断を行う機器診断装置であって、前記電路から漏洩する電流に応じた波形の検出信号を出力する漏電センサと、前記負荷機器の状態又は前記負荷機器の周辺環境の少なくとも一方である機器状態を取得する機器状態取得部と、前記機器状態取得部から出力される状態信号に基づいて前記漏電センサの動作モードを、通常時の漏電検出用の動作モード又は異常診断用の動作モードに決定する動作モード決定部と、前記漏電センサを前記動作モード決定部によって決定された前記動作モードで動作させる漏電センサ駆動部と、前記漏電センサから出力される前記検出信号と前記機器状態取得部から出力される前記状態信号とに基づいて前記診断を行う診断部とを有し、前記動作モード決定部は、前記漏電センサが前記通常時の漏電検出用の動作モードで動作しているときに前記機器状態が予め定められた切替条件を満たす場合、前記漏電センサの動作モードを前記異常診断用の動作モードに切り替える。
本開示の他の態様に係る機器診断システムは、上述した機器診断装置と、ネットワークを介して前記機器診断装置と通信するサーバとを有し、前記サーバは、上述した診断部と連携して上述した負荷機器の診断を行うことを特徴とする。
本開示によれば、低コストであって、負荷機器の診断が容易で且つ当該診断の信頼性が高い機器診断装置及び機器診断システムを提供することができる。
以下に、本開示の実施の形態に係る機器診断装置及び機器診断システムを、図面を参照しながら説明する。以下の実施の形態は、例にすぎず、実施の形態を適宜組み合わせること及び各実施の形態を適宜変更することが可能である。
《実施の形態1》
〈機器診断装置100の構成〉
図1は、実施の形態1に係る機器診断装置100の構成を示す構成図である。図1に示されるように、機器診断装置100は、電源部2から供給される電力によって駆動する負荷機器1の診断を行う装置である。機器診断装置100は、負荷機器1における異常の有無を診断する異常診断装置である。
〈機器診断装置100の構成〉
図1は、実施の形態1に係る機器診断装置100の構成を示す構成図である。図1に示されるように、機器診断装置100は、電源部2から供給される電力によって駆動する負荷機器1の診断を行う装置である。機器診断装置100は、負荷機器1における異常の有無を診断する異常診断装置である。
実施の形態1では、負荷機器1が三相交流電力によって駆動される場合を例にして説明する。この場合、負荷機器1には、電路としての複数(例えば、3本又は4本)の電線ケーブル3a、3b、3cを通して三相交流電力が供給される。なお、負荷機器1が単相交流電力によって駆動される場合、電源部2と負荷機器1とを繋ぐ電線の数は、2本又は3本である。また、電源部2のグランド線、アース線及び中性線は、負荷機器1と結線されていてもよい。
負荷機器1は、例えば、電動機、当該電動機を有する産業機器若しくは産業機械、業務用電気機器、IT(Information Technology)機器、OA(Office Automation)機器、家庭用電気機器又は照明機器などである。実施の形態1では、負荷機器1が電動機である場合を例にして説明する。
機器診断装置100は、1つの漏電センサ10と、機器状態取得部としての状態検知センサ20と、制御部としての制御装置30と、報知部としての表示部40とを有する。
〈漏電センサ10の構成〉
図2は、図1に示される漏電センサ10の構成の一例を示す斜視図である。漏電センサ10は、電線ケーブル3a~3cに流れる電流に応じた波形(各電線ケーブル3a~3cに流れる電流を総和したもの)の検出信号を出力する。すなわち、各電線ケーブル3a~3cに流れる電流の総和が零にならない場合には、電路において漏電が発生していることを意味する。漏電センサ10は、いわゆるアクティブ方式のセンサである。漏電センサ10は、例えば、フラックスゲート型磁気センサを応用した電流センサである。
図2は、図1に示される漏電センサ10の構成の一例を示す斜視図である。漏電センサ10は、電線ケーブル3a~3cに流れる電流に応じた波形(各電線ケーブル3a~3cに流れる電流を総和したもの)の検出信号を出力する。すなわち、各電線ケーブル3a~3cに流れる電流の総和が零にならない場合には、電路において漏電が発生していることを意味する。漏電センサ10は、いわゆるアクティブ方式のセンサである。漏電センサ10は、例えば、フラックスゲート型磁気センサを応用した電流センサである。
漏電センサ10は、鉄心部としての円筒状の磁性体コア11と、第1のコイルとしての励磁コイル12と、第2のコイルとしての検出コイル13とを有する。励磁コイル12及び検出コイル13は、磁性体コア11に巻き付けられている。
励磁コイル12には、後述する図6に示される漏電センサ駆動部31から出力されるセンサ駆動信号が印加される。センサ駆動信号は、例えば、交流電流信号である。駆動電流としての交流電流(以下、「励磁電流」とも呼ぶ。)が励磁コイル12に流れることで、磁性体コア11が周期的に磁気飽和する。検出コイル13は、励磁コイル12に励磁電流が流れたときに発生する誘導起電力を示す信号を検出信号として出力する。なお、漏電センサ10は、漏電センサ駆動部31(図6参照)から出力されるセンサ駆動信号に基づいて動作するセンサであれば、他のセンサであってもよい。例えば、漏電センサ10は、高感度磁気センサ又は磁気センサデバイスを用いた電流センサ、光ファイバを利用した電流センサであってもよい。
図3は、図2に示される漏電センサ10の電線ケーブル3a~3c上における配置の一例を示す図である。図3に示されるように、漏電センサ10は、電線ケーブル3a~3cが磁性体コア11の中空部11aを貫通するように配置されている。漏電センサ10は、電線ケーブル3a~3cに流れる三相電流を総和した零相電流を検出する。ここで、零相電流とは、電線ケーブル3a~3c及び負荷機器1から絶縁抵抗及び浮遊容量を介してアース9に流れる漏洩電流Iaと等価である。なお、図3では、漏洩電流Iaが負荷機器1からアース9に流れる例が示されている。また、以下の説明では、零相電流に符号Idを付して説明する。
図2及び3では、説明の理解を容易にするために、励磁コイル12及び検出コイル13が磁性体コア11の一部に巻き付けられており、励磁コイル12の巻数が検出コイル13の巻数より多い例が示されている。なお、巻きムラ及び外部磁界による出力の変動を抑制するために、励磁コイル12及び検出コイル13は、磁性体コア11の全周に均等に巻き付けられていてもよい。また、励磁コイル12及び検出コイル13のそれぞれの巻数についても、図2及び3に示される巻数に限定されない。例えば、検出コイル13の巻数が励磁コイル12の巻数より多くてもよく、励磁コイル12の巻数は検出コイル13の巻数と同じであってもよい。
また、図2及び3に示す例では、励磁コイル12及び検出コイル13は、磁性体コア11に直接巻き付けられているが、磁性体コア11が封入された樹脂製のケースの外面に巻き付けられていてもよい。これにより、励磁コイル12及び検出コイル13の巻き付け時に磁性体コア11に生じる応力である巻線応力によって、磁性体コア11の特性が劣化することを防止できる。また、励磁コイル12と検出コイル13とは、磁性体コア11を介して磁気的に結合しているが、励磁コイル12及び検出コイル13を単一のコイルとして磁性体コア11に結合してもよい。更に、漏電センサ10は、円筒状の磁性体コア11に開閉機能が設けられた、クランプ開閉型漏電センサであってもよい。
漏電センサ10は、後述する図6に示される漏電センサ駆動部31及び第1の信号収集部32に接続されている。具体的には、漏電センサ10の励磁コイル12が漏電センサ駆動部31に接続され、検出コイル13が第1の信号収集部32に接続されている。
〈漏電センサ10の動作原理〉
次に、漏電センサ10の動作原理について説明する。まず、図4(A)から(D)を用いて、零相電流Idの電流値が0である場合の漏電センサ10の動作原理について説明する。図4(A)は、図2及び3に示される磁性体コア11の磁気特性を示すB-H曲線である。図4(A)において、縦軸は、磁束密度Bの大きさを示し、横軸は、励磁コイル12に励磁電流(交流電流)が流れたときに発生する励磁磁界(以下、「交流磁界H」とも呼ぶ。)の大きさを示す。図4(A)に示されるように、磁性体コア11では、交流磁界Hの大きさが飽和磁界H0、-H0に達した場合、磁束密度Bが飽和する。
次に、漏電センサ10の動作原理について説明する。まず、図4(A)から(D)を用いて、零相電流Idの電流値が0である場合の漏電センサ10の動作原理について説明する。図4(A)は、図2及び3に示される磁性体コア11の磁気特性を示すB-H曲線である。図4(A)において、縦軸は、磁束密度Bの大きさを示し、横軸は、励磁コイル12に励磁電流(交流電流)が流れたときに発生する励磁磁界(以下、「交流磁界H」とも呼ぶ。)の大きさを示す。図4(A)に示されるように、磁性体コア11では、交流磁界Hの大きさが飽和磁界H0、-H0に達した場合、磁束密度Bが飽和する。
図4(B)は、零相電流Idの電流値が0である場合の磁性体コア11における交流磁界Hの波形W11を示すグラフである。図2及び3に示される励磁コイル12に三角波形状の励磁電流が通電された場合、交流磁界Hの波形W11は、正負対称の波形を示す。なお、励磁コイル12の巻数をN1、励磁電流をI、磁性体コア11の平均半径をrとしたとき、交流磁界Hは、以下の式(1)によって表される。
ここで、磁性体コア11の断面積をS、磁性体コア11を通過する磁束をφとしたとき、磁束φは、磁束密度Bと断面積Sとの積である。図4(C)は、零相電流Idの電流値が0である場合の磁性体コア11を通過する磁束φの時間変化を示すグラフW12である。図4(A)及び(C)に示されるように、磁性体コア11の磁束密度Bが飽和しているときに、磁束φの時間変化は0である。図4(C)に示されるように、零相電流Idの電流値が0である場合、磁束φが正であるときの時間変化が0である周期t1は、磁束φが負であるときの時間変化が0である周期t1と同じである。
次に、零相電流Idの電流値が0であるときに、検出コイル13(図2及び3参照)に生じる誘導起電力を示す出力電圧をV、検出コイル13の巻数をN2としたとき、出力電圧Vは、ファラデーの電磁誘導の法則に従って、以下の式(2)によって表される。
ここで、磁性体コア11の断面積Sは定数である。また、磁性体コア11の透磁率をμとしたとき、磁束密度Bは透磁率μと交流磁界Hとの積であるため、式(2)を以下の式(3)に変形することができる。
式(3)において、μ0は真空の透磁率を示し、μrは磁性体コア11の比透磁率を示す。実施の形態1では、真空の透磁率μ0は、例えば、4π×10-7(H/m)である。上述した式(2)に示されるように、出力電圧Vは、磁束φの時間変化に比例する。磁束φは磁束密度Bと磁性体コア11の断面積Sとの積であり、当該断面積Sは定数であるため、磁束密度Bの時間変化に応じた出力電圧Vが得られる。
図4(D)は、零相電流Idの電流値が0である場合の出力電圧Vの波形W13を示すグラフである。図4(A)、(C)及び(D)に示されるように、磁束密度Bの時間変化が0である場合、すなわち、磁束密度Bが飽和しているとき、出力電圧Vも0である。図4(A)に示されるように、磁性体コア11のB-H曲線は原点対称の曲線であるため、出力電圧Vが0となる周期は、交流磁界Hの周波数の2倍の周期で繰り返される。図4(D)に示されるように、磁束φの変化が正であるときの出力電圧Vが0である間隔t2は、磁束φの変化が負であるときの出力電圧Vが0である間隔t2と同じである。
次に、図5(A)から(D)を用いて、零相電流Idの電流値が0でない場合の漏電センサ10の動作原理について説明する。以下の説明において、零相電流Idによって、磁性体コア11(図2及び3を参照)に発生する励磁磁界をHdとする。励磁磁界Hdは、アンペールの法則に従って、以下の式(4)によって表される。式(4)において、rは、磁性体コア11の平均半径を示す。
図5(A)は、図2及び3に示される磁性体コア11のB-H曲線を示すグラフである。図5(A)において、縦軸は、磁束密度Bの大きさを示し、横軸は、励磁磁界Hsの大きさを示す。励磁磁界Hsは、励磁コイル12に励磁電流が流れたときに発生する交流磁界Hと、上述した励磁磁界Hdとの和である。零相電流Idの電流値が0でない場合、磁性体コア11は、図4(A)と同様に、励磁磁界Hsの大きさが飽和磁界H0、-H0にした場合、磁束密度Bが飽和する。
図5(B)は、零相電流Idの電流値が0でない場合の磁性体コア11に印加される励磁磁界Hsの波形W21を示すグラフである。ここで、零相電流Idが直流電流である場合、当該直流電流によって発生した励磁磁界Hdは、直流のバイアス磁界として、交流磁界Hに重畳される。そのため、図5(B)に示されるように、励磁磁界Hsの波形W21は、正負非対称の波形を示す。
図5(C)は、零相電流Idの電流値が0でない場合の磁性体コア11を通過する磁束φの時間変化を示すグラフW22である。図5(C)に示されるように、零相電流Idの電流値が0でない場合、磁束φが正であるときの時間変化が0である周期t3は、磁束φが負であるときの時間変化が0である周期t4と異なる。これは、図5に示される励磁磁界Hsの波形W21は、正負非対称の波形を示すためである。
図5(D)は、零相電流Idの電流値が0でないときの検出コイル13に生じる出力電圧Vの波形W23を示すグラフである。図5(D)に示されるように、零相電流Idの電流値が0でないとき、出力電圧Vが0である間隔は一定ではない。具体的には、図5(D)に示される磁束φの変化が正であるときの出力電圧Vが0である間隔t5は、磁束φの変化が負であるときの出力電圧Vが0である間隔t6より長い。
図5(D)に示される出力電圧Vの変化は、励磁磁界Hsの周波数fの2倍の周期で得られる。よって、図5(D)に示される出力電圧Vの波形W23から励磁磁界Hsの周波数fの2倍に相当する成分(すなわち、第2次高調波成分)V2fのみを抽出することによって、被測定電流である零相電流Id(すなわち、漏洩電流)を算出することができる。なお、第2次高調波成分V2fの抽出には、励磁磁界Hsの制御と同期するロックインアンプが用いられてもよい。また、第2次高調波成分V2fの抽出には、アナログ回路によって構築されたバンドパスフィルタ、デジタル回路によって構築されたデジタルフィルタであってもよい。また、マイクロコンピュータを用いることでフーリエ演算によって算出された特定の周波数成分を第2次高調波成分V2fとして抽出してもよい。
次に、零相電流Idと検出コイル13に生じる出力電圧Vとの関係について説明する。図5(D)に示される出力電圧Vの波形W23についてフーリエ級数展開を行うと以下の式(5)が得られる。式(5)において、nは、1以上の整数である。

式(5)において、nが偶数であるとき、フーリエ係数a0=0であり、フーリエ係数an=0である。また、出力電圧Vcの第n次高調波成分Vnfは、以下の式(6)によって表される。

式(6)において、fは励磁磁界Hsの周波数を示し、H0は磁性体コア11の飽和磁界を示し、Hmは励磁磁界Hsの最大値を示す。式(6)にn=2を代入すると、以下の式(7)が算出される。

上述した式(4)を式(7)に代入することによって、以下の式(8)が得られる。

式(8)に示されるように、出力電圧Vcの第2次高調波成分V2fは、零相電流Idに比例する。また、式(7)及び(8)に示されるように、第2次高調波成分V2fは、励磁磁界Hsの周波数f、検出コイル13の巻き数N2、励磁磁界Hsの最大値Hm、磁性体コア11の飽和磁界H0、磁性体コア11の比透磁率μr及び磁性体コア11の断面積Sなどに依存する。
式(8)の算出にあたって、励磁磁界Hsの波形が三角波である場合を例にして説明したが、励磁磁界Hsの波形が正弦波であっても、係数は異なるが、第2次高調波成分V2fが依存するパラメータは同じである。また、式(8)の算出にあたって、零相電流Idが直流電流である場合を例にして説明したが、サンプリング条件を調整することで、零相電流Idが交流電流であっても算出することができる。当該サンプリング条件は、励磁磁界Hsの周波数を零相電流Idの周波数に対して2倍以上にする等である。
〈状態検知センサ20の構成〉
次に、上述した図1に示される状態検知センサ20の構成について説明する。状態検知センサ20は、負荷機器1の状態を示す物理量を取得する。状態検知センサ20は、例えば、負荷機器1の振動を測定する振動センサである。なお、状態検知センサ20は、負荷機器1の温度を測定する温度センサ又は赤外線センサであってもよい。当該温度センサ又は赤外線センサは、負荷機器1の過熱領域を検出する。また、状態検知センサ20は、負荷機器1の動きを検出するモーションセンサであってもよい。
次に、上述した図1に示される状態検知センサ20の構成について説明する。状態検知センサ20は、負荷機器1の状態を示す物理量を取得する。状態検知センサ20は、例えば、負荷機器1の振動を測定する振動センサである。なお、状態検知センサ20は、負荷機器1の温度を測定する温度センサ又は赤外線センサであってもよい。当該温度センサ又は赤外線センサは、負荷機器1の過熱領域を検出する。また、状態検知センサ20は、負荷機器1の動きを検出するモーションセンサであってもよい。
また、状態検知センサ20は、負荷機器1における放電の有無を検出する電磁波センサであってもよい。当該電磁波センサは、例えば、コイル又は磁気センサを有することで、放電によって発生する電磁波ノイズを検出する。また、状態検知センサ20は、負荷機器1の動作時の異音(「変音」とも呼ぶ。)を検出する異音センサ(例えば、マイク)であってもよい。また、状態検知センサ20は、負荷機器1における漏水の有無を検出する漏水センサ又は負荷機器1における漏油の有無を検出する漏油センサであってもよい。また、状態検知センサ20は、負荷機器1における発煙の有無を検出する発煙センサであってもよい。なお、状態検知センサ20は、負荷機器1の状態を直接的又は間接的に検出可能であれば、任意の方法で配置されていればよい。
また、機器状態取得部としての状態検知センサ20は、負荷機器1及び電源部の出力におけるEMC(Electromagnetic Compatibility)に関連する電磁ノイズ放出の有無を検出するノイズ計であってもよい。当該ノイズ計は、例えば、コイル又はノイズの周波数に合わせたアンテナ(ダイポールアンテナ、八木アンテナ(登録商標))を有することで、負荷機器1及び電源部の出力に搭載された各種フィルタの劣化により増大し、空間中を伝搬するEMC関連の電磁ノイズを検出する。また、電源、信号、グランドライン(配線)を介してもEMC関連の電磁ノイズは伝搬するため、ノイズ計は高周波の読みとりに対応した電圧読取器の機能を有するものであってもよい。
〈制御装置30の構成〉
次に、制御装置30の構成について説明する。図6は、実施の形態1に係る制御装置30の構成を示すブロック図である。図6に示されるように、制御装置30は、漏電センサ駆動部31と、第1の信号収集部32と、第1の信号処理部33とを有する。
次に、制御装置30の構成について説明する。図6は、実施の形態1に係る制御装置30の構成を示すブロック図である。図6に示されるように、制御装置30は、漏電センサ駆動部31と、第1の信号収集部32と、第1の信号処理部33とを有する。
漏電センサ駆動部31は、励磁コイル12(図2及び3参照)に通電する励磁電流の電流値、励磁電流の周波数f及び励磁電流の波形を制御する。なお、漏電センサ駆動部31は、励磁電流の電流値、励磁電流の周波数f及び励磁電流の波形の少なくとも1つを制御してもよい。
第1の信号収集部32は、検出コイル13から出力される出力電圧を示す信号(以下、「検出信号」とも呼ぶ。)が入力される信号入力部である。第1の信号収集部32は、漏電センサ10から出力される検出信号を、所望の信号形態で取得してもよい。例えば、検出信号がアナログ信号である場合、第1の信号収集部32は、当該アナログ信号をデジタル信号に変換してもよい。
第1の信号処理部33は、第1の信号収集部32に記憶された検出電圧信号及び漏電センサ10の駆動条件に基づいて、検出電圧信号の第2次高調波成分を抽出する。第1の信号処理部33は、漏電センサ駆動部31から出力される励磁電流の周波数fに応じて駆動させる必要がある。このように、漏電センサ駆動部31と第1の信号処理部33とを同期させることで、漏電センサ10(図1参照)によって検出された零相電流に対応するセンサ出力の大きさ(すなわち、電流検出感度)及び検出可能な零相電流の周波数帯域を調整することができる。すなわち、漏電センサ10の計測ダイナミックレンジを調整することができる。なお、第1の信号処理部33は、上述した図5(D)に示される出力電圧Vcの時間変化を直接測定してもよいし、磁性体コア11が磁気飽和に至るまでの時間を計測してもよい。
制御装置30は、第2の信号収集部34と、第2の信号処理部35とを更に有する。
第2の信号収集部34は、状態検知センサ20から出力される負荷機器1の状態を示す状態信号(以下、「機器状態信号」とも呼ぶ。)が入力される信号入力部である。第2の信号収集部34は、状態検知センサ20から出力される信号を所望の信号形態で取得してもよい。第2の信号収集部34は、例えば、状態検知センサ20から出力されるアナログ信号をデジタル信号に変換してもよい。
第2の信号処理部35は、第2の信号収集部34に記憶された機器状態信号から特徴量を抽出する。例えば、第2の信号処理部35は、出力信号の波形の振幅値又は実効値を算出する。また、第2の信号処理部35は、予め定められた閾値を超えている値を特徴量として算出してもよい。更に、第2の信号処理部35は、周波数スペクトル又は主要周波数成分の分析によって特徴量を算出してもよい。
ここで、負荷機器1の状態に応じて、電線ケーブル3a~3cを流れる漏洩電流の電流値が増減する場合がある。また、人体の保護及び火災防止などの絶縁監視を行うために漏洩電流の定格感度電流では、負荷機器1の状態の変化に応じた漏洩電流の変化をとらえられない場合がある。
具体的には、漏電センサ10を用いて絶縁監視を行う目的又は漏電センサ10の用途に応じて、定格感度電流が異なる。例えば、絶縁監視を行う目的が人体保護である場合、定格感度電流は5mA又は30mAが用いられる。また、漏電センサ10の定格に応じて、漏電センサ10が遮断動作を行う電流範囲が異なる。例えば、定格感度電流が5mAである場合には、4mAから6mAまでの動作電流範囲内で、定格感度電流が30mAである場合には、15mAから30mAまでの動作電流範囲内で動作するように規格が定められているため、漏電センサ10の感度は固定値である。なお、漏電センサに備えられた感度調整トリマ又は感度調整ダイヤルによって、漏電センサの後段に設けられた増幅アンプのゲインを調整することで感度を調整できる場合もあるが、通常の運転状況下で頻繁に感度を調整することは困難である。
実施の形態1では、制御装置30は、動作モード決定部36と、診断部としての異常判定部37とを更に有する。
動作モード決定部36は、状態検知センサ20から出力される機器状態信号に基づいて漏電センサ10の動作モードを、通常時の動作モードである漏電検出用の動作モード又は異常診断用の動作モードに決定する。動作モード決定部36は、第2の信号収集部34及び第2の信号処理部35を介して提供される機器状態信号の特徴量に基づいて、漏電センサ10の動作モードを決定(設定)する。動作モード決定部36は、決定された動作モードを示す動作モード設定信号を漏電センサ駆動部31に出力する。漏電センサ駆動部31は、当該動作モード設定信号に基づいて、励磁コイル12(図2及び3参照)に通電する励磁電流の電流値、励磁電流の周波数f及び励磁電流の波形の少なくとも1つを制御する。これにより、漏電センサ駆動部31は、漏電センサ10を、動作モード決定部36によって決定された動作モードで動作させる。
以下の説明において、通常時の漏電検出用の動作モードを「通常監視モード」、異常診断用の動作モードを「異常診断モード」とも呼ぶ。「通常監視モード」とは、負荷機器1の通常時の運転状況を監視するモードである。「異常診断モード」とは、負荷機器1の異常診断を行うために、漏電センサ4の計測ダイナミックレンジを調整して漏電電流を計測するモードである。ここで、計測ダイナミックレンジとは、漏電センサ10の電流検出感度及び周波数帯域を言う。「異常診断モード」の計測ダイナミックレンジは、「通常監視モード」の計測ダイナミックレンジより広い。
次に、動作モード決定部36が、動作モードに応じて漏電センサ10のダイナミックレンジを調整する一例について説明する。動作モードが「通常監視モード」であるときの計測ダイナミックレンジは、通常監視用の第1のダイナミックレンジである。第1のダイナミックレンジでは、検出感度が低く、周波数帯域が狭いダイナミックレンジである。例えば、第1のダイナミックレンジでは、定格電流300mA、周波数50Hz/60Hzのように設定されてもよい。
動作モードが「異常診断モード」であるときの計測ダイナミックレンジは、漏電検出用の第2のダイナミックレンジである。第2のダイナミックレンジでは、検出感度が高く、周波数帯域が広いダイナミックレンジである。例えば、第2のダイナミックレンジでは、定格電流10mA、DC~周波数10kHzのように設定されてもよい。
動作モード決定部36が、漏電センサ10の動作モードを「通常監視モード」に設定した場合、漏電センサ駆動部31は励磁コイル12(図2参照)に出力するセンサ駆動信号を制御することで、漏電センサ10の計測ダイナミックレンジを上述した「第1のダイナミックレンジ」に設定する。このとき、第1の信号処理部33は、第1の信号収集部32から提供される検出コイル13の出力信号に基づいて零相電流の電流値を検出する。異常判定部37は、異常電流の電流値に基づいて負荷機器1の異常の有無を判定する。
動作モード決定部36が漏電センサ10の動作モードを「異常診断モード」に切り替えた場合、漏電センサ駆動部31は励磁コイル12(図2参照)に出力するセンサ駆動信号を制御することで、漏電センサ10の計測ダイナミックレンジを上述した「第2のダイナミックレンジ」に設定する。このとき、第1の信号処理部33は、第1の信号収集部32から提供される検出コイル13の出力信号とセンサ駆動信号とを同期させて特定の周波数成分のみを抽出してもよい。動作モード決定部36は、例えば、漏電センサ10の電流検出感度を調整することで、漏電センサ10の計測ダイナミックレンジを調整する。また、動作モード決定部36は、漏電センサ10の周波数帯域を調整することで、漏電センサ10の計測ダイナミックレンジを調整してもよい。更に、動作モード決定部36は、漏電センサ10の電流検出感度及び周波数帯域の両方を調整することで、漏電センサ10の計測ダイナミックレンジを調整してもよい。
動作モード決定部36は、判定結果を示す信号、具体的には、動作モードの切り替えの有無の判定結果を示す信号を異常判定部37に出力する。
異常判定部37は、第1の信号処理部33から出力される信号、第2の信号処理部35から出力される信号及び動作モード決定部36から出力される判定結果を示す信号に基づいて、負荷機器1における異常の有無を判定する。このように、異常判定部37は、種類の異なる複数のセンサから出力される情報に基づいて負荷機器1の異常の有無を診断する。よって、機器診断装置100の診断の信頼性を高めることができる。このように、機器診断装置100では、負荷機器1の異常の有無の判定にあたって、漏電センサ10と状態検知センサ20とが連動している。
〈表示部40の構成〉
次に、図1に戻って、表示部40の構成について説明する。表示部40は、異常判定部37における診断の結果(すなわち、異常の有無についての判定の結果)を報知する。表示部40は、例えば、当該判定結果を示す情報を表示するディスプレイなどである。なお、機器診断装置100は、表示部40の代わりに、遮断器、リレー、警告ブザーなどの保安機器を報知部として有していてもよい。このように、機器診断装置100は、異常診断後の負荷機器1の運用方法に対応する手段によって、異常判定部37における判定結果をユーザに報知すればよい。
次に、図1に戻って、表示部40の構成について説明する。表示部40は、異常判定部37における診断の結果(すなわち、異常の有無についての判定の結果)を報知する。表示部40は、例えば、当該判定結果を示す情報を表示するディスプレイなどである。なお、機器診断装置100は、表示部40の代わりに、遮断器、リレー、警告ブザーなどの保安機器を報知部として有していてもよい。このように、機器診断装置100は、異常診断後の負荷機器1の運用方法に対応する手段によって、異常判定部37における判定結果をユーザに報知すればよい。
なお、図1及び6では、機器診断装置100の各構成要素の接続形態は、有線及び無線のいずれであってもよい。また、機器診断装置100は、単一の状態検知センサ20に限られず、複数の状態検知センサ20を有していてもよい。また、機器診断装置100は、種類の異なる複数の状態検知センサ20を有していてもよい。また、図1に示される負荷機器1と電源部2との間には、インバータ制御機器が設けられていてもよい。これにより、機器診断装置100を、三相交流の周波数を可変できる電路に適用することができる。また、機器診断装置100を、電源部2が太陽電池又は燃料電池などの直流電源であることで直流電流が流れる電路に適用することができる。
〈ハードウェア構成〉
次に、機器診断装置100のハードウェア構成について説明する。図7(A)は、機器診断装置100のハードウェア構成を概略的に示す図である。図7(A)に示されるように、機器診断装置100の制御装置30は、例えば、ソフトウェアとしてのプログラムを格納する記憶装置としてのメモリ30aと、メモリ30aに格納されたプログラムを実現する情報処理部としてのプロセッサ30bとを用いて(例えば、コンピュータによって)実現することができる。プロセッサ30bには、漏電センサ10、状態検知センサ20及び表示部40が、バス30dを介して接続されている。なお、制御装置30の構成要素の一部が、図7(A)に示されるメモリ30aと、プログラムを実行するプロセッサ30bとによって実現されてもよい。また、制御装置30は、電気回路によって実現されてもよい。
次に、機器診断装置100のハードウェア構成について説明する。図7(A)は、機器診断装置100のハードウェア構成を概略的に示す図である。図7(A)に示されるように、機器診断装置100の制御装置30は、例えば、ソフトウェアとしてのプログラムを格納する記憶装置としてのメモリ30aと、メモリ30aに格納されたプログラムを実現する情報処理部としてのプロセッサ30bとを用いて(例えば、コンピュータによって)実現することができる。プロセッサ30bには、漏電センサ10、状態検知センサ20及び表示部40が、バス30dを介して接続されている。なお、制御装置30の構成要素の一部が、図7(A)に示されるメモリ30aと、プログラムを実行するプロセッサ30bとによって実現されてもよい。また、制御装置30は、電気回路によって実現されてもよい。
図7(B)は、機器診断装置100のハードウェア構成の他の例を概略的に示す図である。図7(B)に示されるように、制御装置30は、単一回路又は複合回路等の専用のハードウェアとしての処理回路30cを用いて実現されていてもよい。この場合、制御装置30の機能は、処理回路30cによって実現される。
〈動作〉
次に、実施の形態1に係る機器診断装置100の動作について説明する。図8は、実施の形態1に係る機器診断装置100の動作を示すフローチャートである。以下では、漏電センサ10の動作モードを、「通常監視モード」から「異常診断モード」に切り替える例を説明する。
次に、実施の形態1に係る機器診断装置100の動作について説明する。図8は、実施の形態1に係る機器診断装置100の動作を示すフローチャートである。以下では、漏電センサ10の動作モードを、「通常監視モード」から「異常診断モード」に切り替える例を説明する。
先ず、ステップST1において、漏電センサ駆動部31は、漏電センサ10の動作モードを「通常監視モード」に設定する。
ステップST2において、動作モード決定部36は、漏電センサ10の計測ダイナミックレンジを、上述した第1のダイナミックレンジに設定する。
ステップST3において、状態検知センサ20は、負荷機器1の状態を示す信号である機器状態信号を取得する。
ステップST4において、第2の信号処理部35は、状態検知センサ20から提供される機器状態信号に対して、信号処理(例えば、デジタル信号への変換など)を行う。
ステップST5において、動作モード決定部36は、第2の信号処理部35から提供される機器状態信号が予め定められた切替条件を満たすか否かを判定する。動作モード決定部36は、切替条件を満たすと判定した場合(つまり、ステップST5において、判定がYesである場合)、処理をステップST6に進める。
状態検知センサ20が振動センサである場合、動作モード決定部36は、負荷機器1で発生した振動に応じた信号、すなわち、負荷機器1の速度(単位:m/s)の振幅に応じた信号を取得することができる。動作モード決定部36は、振動センサから出力される信号に基づいて漏電センサ10の動作モードを切り替える。例えば、動作モード決定部36は、信号の振幅の大きさが予め定められた閾値Th以上である場合に切替条件を満たすと判断して、漏電センサ10の動作モードを「異常診断モード」に切り替える。なお、振動センサは、負荷機器1の変位量(単位:m)又は加速度(単位:m/s2)を検出してもよく、動作モード決定部36は当該負荷機器1の変位量(又は加速度)と閾値Thとを比較することで、漏電センサ10の動作モードを切り替えてもよい。なお、動作モード決定部36は、漏電センサ10から出力される検出信号を電気信号として評価する場合、漏電センサ10の定格電圧の1/2又は1/3の電圧値と閾値Thとを比較してもよい。
また、状態検知センサ20が異音センサである場合、動作モード決定部36は、負荷機器1で発生した異音に応じた信号が提供される。動作モード決定部36は、例えば、異音センサから出力される信号に対して周波数解析を行うことで周波数スペクトルを取得する。動作モード決定部36は、例えば、当該周波数スペクトルの特定の周波数における振幅値が閾値Th以上である場合に切替条件を満たすと判断して、漏電センサ10の動作モードを「異常診断モード」に切り替える。なお、動作モード決定部36は、特定の周波数帯又は複数の周波数に基づいて漏電センサ10の動作モードを切り替えてもよい。
一方、動作モード決定部36は、負荷機器1で発生した振動又は音に応じた信号の振幅が予め定められた閾値Th未満である場合(すなわち、ステップST6において判定がNoである場合)、上記切替条件を満たさないと判断して、処理をステップST8に進める。このとき、動作モード決定部36は、漏電センサ10の動作モードを通常監視モードに維持する。
ステップST6において、漏電センサ駆動部31は、漏電センサ10の動作モードを、「通常監視モード」から「異常診断モード」に切り替える。
ステップST7において、動作モード決定部36は、漏電センサ10の計測ダイナミックレンジを、上述した第2のダイナミックレンジに変更する。
ステップST8において、漏電センサ10は、電線ケーブル3a~3cから漏洩する電流の電流値を検出する。
ステップST9において、第1の信号処理部33は、漏電センサ10から提供される電線ケーブル3a~3cから漏洩する電流に応じた波形の検出信号に対して、信号処理(例えば、デジタル信号への変換など)を行う。
ステップST10において、異常判定部37は、第1の信号処理部33から提供される漏電センサ10の検出信号及び第2の信号処理部35から提供される機器状態信号に基づいて、負荷機器1における異常の発生の有無を判定する。
異常判定部37は、漏電センサ10及び状態検知センサ20の各々から出力される時系列データに基づいて、負荷機器1における異常の発生の有無についての判定(以下、「異常判定」とも呼ぶ。)を行う。実施の形態1では、異常判定部37は、各センサから出力される時系列データとしての信号波形の振幅値と閾値とを比較することで、負荷機器1における異常の発生の有無を判定する。具体的には、漏電センサ10から出力される信号波形の振幅値及び状態検知センサ20から出力される信号波形の振幅値の両方が閾値を超えている場合、異常判定部37は、負荷機器1において、異常が発生していると判断する。
また、異常判定部37は、漏電センサ10及び状態検知センサ20から出力される各信号のS/N比を比較することによって、負荷機器1における異常の発生の有無を判定してもよい。例えば、状態検知センサ20から出力される機器状態信号よりも漏電センサ10から出力される検出信号に基づいて異常判定が行い易い場合、異常判定部37は、漏電センサ10及び状態検知センサ20の各検出結果に重み付けを行うなど、当該検出結果に優先順位を付けることで異常判定を行ってもよい。なお、異常判定部37は、上述した時系列データに基づいて異常判定を行う場合、当該時系列データに対して周波数解析処理を行ってもよく、当該時系列データが特徴量を示す信号を含んでいるか否かを分析する処理を行ってもよい。
そして、異常判定部37は、第1の信号収集部32から提供される漏電センサ10の検出信号と漏電センサ駆動部31から提供されるセンサ駆動信号(励磁電流の電流値など)とに基づいて、漏電電流の時系列データを生成する。異常判定部37は、2種類の時系列データ、すなわち、漏電電流の時系列データと第2の信号処理部35から提供される状態検知信号の時系列データとに基づいて、負荷機器1における異常の発生の有無を判定する。ここで、「時系列」とは、時間の経過に従って定期的に計測して得た値を整理又は配列した系列のことである。
ステップST11において、表示部40は、異常判定部37の判定結果を表示する。
〈実施の形態1の効果〉
以上に説明した実施の形態1によれば、機器診断装置100は、漏電センサ10と、負荷機器1の状態を取得する状態検知センサ20とを有する。また、機器診断装置100の動作モード決定部36は、漏電センサ10が通常監視モードで動作しているときに負荷機器1の状態が切替条件を満たす場合、漏電センサ10の動作モードを異常診断用の動作モードに切り替える。これにより、負荷機器1の通常の運転状況下で漏電センサ10の検出感度を頻繁に変更する必要がないため、負荷機器1の診断を容易に行うことができる。言い換えれば、負荷機器1の通常時の漏電の有無の監視と負荷機器1についての異常診断を、1つの漏電センサ10の計測ダイナミックレンジを調整することで実施することができる。よって、検出感度の異なる複数の漏電センサ10を備える必要がないため、低コストの機器診断装置100を提供することができる。
以上に説明した実施の形態1によれば、機器診断装置100は、漏電センサ10と、負荷機器1の状態を取得する状態検知センサ20とを有する。また、機器診断装置100の動作モード決定部36は、漏電センサ10が通常監視モードで動作しているときに負荷機器1の状態が切替条件を満たす場合、漏電センサ10の動作モードを異常診断用の動作モードに切り替える。これにより、負荷機器1の通常の運転状況下で漏電センサ10の検出感度を頻繁に変更する必要がないため、負荷機器1の診断を容易に行うことができる。言い換えれば、負荷機器1の通常時の漏電の有無の監視と負荷機器1についての異常診断を、1つの漏電センサ10の計測ダイナミックレンジを調整することで実施することができる。よって、検出感度の異なる複数の漏電センサ10を備える必要がないため、低コストの機器診断装置100を提供することができる。
また、実施の形態1によれば、機器診断装置100は、漏電センサ10から出力される検出信号と状態検知センサ20から出力される機器状態信号とに基づいて負荷機器1の診断を行う。これにより、複数の種類のセンサから出力される信号に基づいて負荷機器1における異常の発生の有無を診断することができる。よって、信頼性の高い機器診断装置100を提供することができる。したがって、低コストであって、負荷機器1の診断が容易で且つ当該診断の信頼性が高い機器診断装置100を提供することができる。
《実施の形態1の変形例》
図9は、実施の形態1の変形例に係る機器診断装置100Aの構成を示すブロック図である。実施の形態1の変形例に係る機器診断装置100Aは、状態検知センサ20の代わりに、機器状態取得部としての周辺環境情報取得部20Aを有する点で、実施の形態1に係る機器診断装置100と相違する。これ以外の点については、実施の形態1の変形例に係る機器診断装置100Aは、実施の形態1に係る機器診断装置100と同じである。そのため、以下の説明では、図1を参照する。
図9は、実施の形態1の変形例に係る機器診断装置100Aの構成を示すブロック図である。実施の形態1の変形例に係る機器診断装置100Aは、状態検知センサ20の代わりに、機器状態取得部としての周辺環境情報取得部20Aを有する点で、実施の形態1に係る機器診断装置100と相違する。これ以外の点については、実施の形態1の変形例に係る機器診断装置100Aは、実施の形態1に係る機器診断装置100と同じである。そのため、以下の説明では、図1を参照する。
図9に示されるように、機器診断装置100Aは、漏電センサ10と、機器状態取得部としての周辺環境情報取得部20Aと、制御装置30と、表示部40とを有する。
周辺環境情報取得部20Aは、負荷機器1(図1を参照)の周辺環境の状態を示す周辺環境情報を検知する。周辺環境情報は、例えば、負荷機器1が設置される設置場所における天候、設置場所における雨量、設置場所における照度、設置場所における風速、設置場所における温度及び設置場所における湿度のうちの少なくとも1つを含む。なお、「設置場所」とは、負荷機器1が設置される場所の周辺を含む。
周辺環境情報取得部20Aは、例えば、負荷機器1の設置場所における降雨量を検出する降雨センサである。周辺環境情報取得部20Aは、負荷機器1の設置場所における照度を検出する照度センサであってもよく、当該設置場所における風速を検出する風速センサであってもよい。また、周辺環境情報取得部20Aは、当該設置場所における温度を検出する温度センサであってもよく、当該設置場所における湿度を検出する湿度センサなどである。また、周辺環境情報取得部20Aは、例えば、気象情報提供サービスのサーバにアクセスして、負荷機器1の設置場所における天候を示す天候情報を取得してもよい。周辺環境情報取得部20Aは、負荷機器1の周辺環境を示す状態信号としての周辺環境信号を、第2の信号収集部34に入力する。なお、周辺環境情報取得部20Aは、負荷機器1の周辺環境を直接的又は間接的に検出可能であれば、任意の方法で配置されていればよい。
負荷機器1の周辺環境は、負荷機器1の運転状況と連動していないが、外的要因として負荷機器1の動作に影響を及ぼす場合がある。実施の形態1の変形例では、制御装置30の動作モード決定部36は、漏電センサ10が通常監視モードで動作しているときに負荷機器1の周辺環境が予め定められた切替条件を満たす場合、漏電センサ10の動作モードを異常診断用の動作モードに切り替える。言い換えれば、動作モード決定部36は、負荷機器1の周辺環境が切替条件を満たす場合、漏電センサ10の計測ダイナミックレンジを、上述した検出感度の高い第2のダイナミックレンジに切り替える。なお、負荷機器1の周辺環境が動作モードの切替条件を満たす場合、動作モード決定部36は、漏電センサ10の計測ダイナミックレンジを、周波数帯域の広いダイナミックレンジに切り替えることもできる。また、負荷機器1の周辺環境が動作モードの切替条件を満たす場合、動作モード決定部36は、漏電センサ10の計測ダイナミックレンジを、検出感度が高く且つ周波数帯域の広いダイナミックレンジに切り替えることもできる。
異常判定部37は、漏電センサ10及び周辺環境情報取得部20Aの各々から出力される時系列データに基づいて、負荷機器1における異常判定を行う。具体的には、漏電センサ10から出力される信号波形の振幅値が閾値を超えていて且つ周辺環境情報取得部20Aから出力される周辺環境情報が予め定められた条件を満たしている場合、異常判定部37は、負荷機器1において、異常が発生していると判断する。
〈実施の形態1の変形例の効果〉
以上に説明した実施の形態1の変形例によれば、機器診断装置100Aは、漏電センサ10と、負荷機器1の周辺環境を取得する周辺環境情報取得部20Aと、動作モード決定部36とを有する。動作モード決定部36は、負荷機器1の周辺環境が切替条件を満たす場合、漏電センサ10の動作モードを異常診断用の動作モードに切り替える。これにより、負荷機器1の通常の運転状況下で漏電センサ10の検出感度を頻繁に変更する必要がないため、負荷機器1の診断を容易に行うことができる。言い換えれば、負荷機器1の通常時の漏電の有無の監視と負荷機器1についての異常診断を、1つの漏電センサ10の計測ダイナミックレンジを調整することで実施することができる。よって、検出感度の異なる複数の漏電センサ10を備える必要がないため、低コストの機器診断装置100Aを提供することができる。
以上に説明した実施の形態1の変形例によれば、機器診断装置100Aは、漏電センサ10と、負荷機器1の周辺環境を取得する周辺環境情報取得部20Aと、動作モード決定部36とを有する。動作モード決定部36は、負荷機器1の周辺環境が切替条件を満たす場合、漏電センサ10の動作モードを異常診断用の動作モードに切り替える。これにより、負荷機器1の通常の運転状況下で漏電センサ10の検出感度を頻繁に変更する必要がないため、負荷機器1の診断を容易に行うことができる。言い換えれば、負荷機器1の通常時の漏電の有無の監視と負荷機器1についての異常診断を、1つの漏電センサ10の計測ダイナミックレンジを調整することで実施することができる。よって、検出感度の異なる複数の漏電センサ10を備える必要がないため、低コストの機器診断装置100Aを提供することができる。
また、実施の形態1の変形例によれば、機器診断装置100Aは、漏電センサ10から出力される検出信号と周辺環境情報取得部20Aから出力される周辺環境信号とに基づいて負荷機器1の診断を行う。これにより、複数の種類のセンサから出力される信号に基づいて負荷機器1における異常の発生の有無を診断することができる。よって、信頼性の高い機器診断装置100Aを提供することができる。したがって、低コストであって、負荷機器1の診断が容易で且つ当該診断の信頼性が高い機器診断装置100Aを提供することができる。
《実施の形態2》
図10は、実施の形態2に係る機器診断装置200の構成を示すブロック図である。図10において、図1及び6に示される構成要素と同一又は対応する構成要素には、図1及び6に示される符号と同じ符号が付される。実施の形態2に係る機器診断装置200の動作モード決定部は、動作モードの順序を示す動作シーケンスを決定する動作シーケンス決定部236である点で、実施の形態1に係る機器診断装置100と相違する。これ以外の点については、実施の形態2に係る機器診断装置200は、実施の形態1に係る機器診断装置100と同じである。そのため、以下の説明では、図1を参照する。
図10は、実施の形態2に係る機器診断装置200の構成を示すブロック図である。図10において、図1及び6に示される構成要素と同一又は対応する構成要素には、図1及び6に示される符号と同じ符号が付される。実施の形態2に係る機器診断装置200の動作モード決定部は、動作モードの順序を示す動作シーケンスを決定する動作シーケンス決定部236である点で、実施の形態1に係る機器診断装置100と相違する。これ以外の点については、実施の形態2に係る機器診断装置200は、実施の形態1に係る機器診断装置100と同じである。そのため、以下の説明では、図1を参照する。
図10に示されるように、機器診断装置200は、漏電センサ10と、状態検知センサ20と、制御装置230と、表示部40とを有する。
制御装置230は、漏電センサ駆動部31と、第1の信号収集部32と、第1の信号処理部33と、第2の信号収集部34と、第2の信号処理部35と、動作シーケンス決定部236と、異常判定部37とを有する。
動作シーケンス決定部236は、状態検知センサ20から第2の信号処理部35を介して提供される負荷機器1(図1参照)の状態を示す機器状態信号に基づいて漏電センサ10の動作シーケンスを決定する。
図11は、実施の形態2に係る機器診断装置200Aの構成の他の例を示すブロック図である。図11に示されるように、機器診断装置200Aは、状態検知センサ20の代わりに、上述した図9に示される周辺環境情報取得部20Aを有していてもよい。この場合、動作シーケンス決定部236は、周辺環境情報取得部20Aから提供される周辺環境情報に基づいて漏電センサ10の動作シーケンスを決定してもよい。
図12は、実施の形態2に係る機器診断装置200の漏電センサ10の動作シーケンスA~Dの一例を示す図である。図12に示される「動作シーケンスA」は、2種類の動作モードである通常監視モード及び異常診断モードを交互に実行するシーケンスである。具体的には、動作シーケンスAでは、負荷機器1の状態(又は、負荷機器1の周辺環境)が動作モードの切替条件を満たす場合、通常監視モードから異常監視モードへの切り替えが行われる。そして、負荷機器1の状態(又は、負荷機器1の周辺環境)が動作モードの切替条件を満たさなくなった場合、異常監視モードから通常監視モードへの切り替えが行われる。
「動作シーケンスB」は、「通常監視モード+異常診断モード」を繰り返す実行するシーケンスである。「通常監視モード+異常診断モード」とは、通常監視モードと異常診断モードを同時に実行するモードである。
「動作シーケンスC」は、3種類の動作モードである「通常監視モード」、「第1の異常診断モード」及び「第2の異常診断モード」の順に、漏電センサ10を動作するシーケンスである。「第1の異常診断モード」とは、第1の計測ダイナミックレンジで漏電センサ10を動作する異常診断モードである。「第2の異常診断モード」とは、第2の計測ダイナミックレンジで漏電センサ10を動作する異常診断モードである。
動作シーケンス決定部236は、負荷機器1の状態が切替条件を満たす場合、通常監視モードから第1の異常診断モードへの切り替え、第1の異常診断モードから第2の異常診断モードへの切り替え、第2の異常診断モードから通常監視モードへの切り替えを順に行う。このように、動作シーケンスCでは、漏電センサ10が計測ダイナミックレンジの異なる2種類の異常診断モードで動作することによって、電線ケーブル3a~3c(図2参照)における漏電の有無を検出する。これにより、機器状態信号(又は、周辺環境情報)と漏電センサ10から出力される検出信号との相関関係を分析し易くなる。また、負荷機器1における異常の有無を判定するにあたって、漏電センサ10から出力される検出信号の情報量が増えるため、機器診断装置200、200Aの信頼性を高めることができる。
「動作シーケンスD」は、2種類の動作モードである「通常監視モード+第1の異常診断モード」及び「通常監視モード+第2の異常診断モード」を交互に実行するシーケンスである。「通常監視モード+第1の異常診断モード」とは、通常監視モードと上述した第1の異常診断モードを同時に実行するモードである。また、「通常監視モード+第2の異常診断モード」とは、通常監視モードと上述した第2の異常診断モードを同時に実行するモードである。なお、漏電センサ10の動作シーケンスを構成する動作モードの種類は、3種類より多くてもよい。このように、実施の形態2では、2種類の動作モード又は3種類以上の動作モードが1セットとなることで、漏電センサ10が動作する。
〈実施の形態2の効果〉
以上に説明した実施の形態2によれば、機器診断装置200の動作シーケンス決定部236は、状態検知センサ20における検出結果及び負荷機器1の使用環境を示す環境情報に基づいて漏電センサ10の動作シーケンスを判定する。これにより、診断モードを複数実行することができるため、負荷機器1の異常診断の判定についての情報量を増やすことができる。よって、機器診断装置200、200Aの信頼性を高めることができる。
以上に説明した実施の形態2によれば、機器診断装置200の動作シーケンス決定部236は、状態検知センサ20における検出結果及び負荷機器1の使用環境を示す環境情報に基づいて漏電センサ10の動作シーケンスを判定する。これにより、診断モードを複数実行することができるため、負荷機器1の異常診断の判定についての情報量を増やすことができる。よって、機器診断装置200、200Aの信頼性を高めることができる。
《実施の形態3》
図13は、実施の形態3に係る機器診断システム350の構成を示すブロック図である。図13において、図1及び6に示される構成要素と同一又は対応する構成要素には、図1及び6に示される符号と同じ符号が付される。実施の形態3は、機器診断装置100と通信するサーバ50が異常判定部37及び動作モード決定部36と連携する点で、実施の形態1と相違する。これ以外の点については、実施の形態3は、実施の形態1と同じである。
図13は、実施の形態3に係る機器診断システム350の構成を示すブロック図である。図13において、図1及び6に示される構成要素と同一又は対応する構成要素には、図1及び6に示される符号と同じ符号が付される。実施の形態3は、機器診断装置100と通信するサーバ50が異常判定部37及び動作モード決定部36と連携する点で、実施の形態1と相違する。これ以外の点については、実施の形態3は、実施の形態1と同じである。
図13に示されるように、機器診断システム350は、機器診断装置100と、外部サーバであるサーバ50とを備える。サーバ50は、ネットワークを介して機器診断装置100と通信する。サーバ50は、例えば、クラウドサーバである。
サーバ50は、異常判定部37と連携(共働)して負荷機器1の診断を行う。また、サーバ50は、動作モード決定部36と連携(共働)して漏電センサ10の動作モードを決定する。これにより、異常判定部37における判定結果に基づいて動作モード決定部36による切替条件を更新することができる。また、サーバ50を有しない構成(スタンドアローン型の構成)と比較して、様々なフィールドにおける情報が入力されるサーバ50を備えていることで、負荷機器1(図1参照)の診断にあたっての情報量が増えることにより、負荷機器1の診断の信頼性を高めることができる。更に、サーバ50は、人工知能などを活用して、状態検知センサ20と漏電センサ10との相関関係を分析することで、負荷機器1の診断の信頼性を高めることができる。
図14は、実施の形態3に係る機器診断システム350の構成の他の例を示すブロック図である。図14に示されるように、機器診断システム350は、実施の形態1の変形例に係る機器診断装置100Aとサーバ50とによって構成されていてもよい。このとき、サーバ50は、人工知能などを活用して、周辺環境情報取得部20Aと漏電センサ10との相関関係を分析してもよい。
〈実施の形態3の効果〉
以上に説明した実施の形態3によれば、機器診断システム350は、機器診断装置100と、ネットワークを介して機器診断装置100、100Aと通信するサーバ50とを備え、サーバ50は、異常判定部37と連携して負荷機器1の診断を行う。これにより、負荷機器1の診断の信頼性を高めることができる。したがって、低コストであって、負荷機器1の診断が容易で且つ当該診断の信頼性が高い機器診断システム350を提供することができる。
以上に説明した実施の形態3によれば、機器診断システム350は、機器診断装置100と、ネットワークを介して機器診断装置100、100Aと通信するサーバ50とを備え、サーバ50は、異常判定部37と連携して負荷機器1の診断を行う。これにより、負荷機器1の診断の信頼性を高めることができる。したがって、低コストであって、負荷機器1の診断が容易で且つ当該診断の信頼性が高い機器診断システム350を提供することができる。
また、実施の形態3によれば、サーバ50は、動作モード決定部36と連携して漏電センサ10の動作モードを決定する。これにより、異常判定部37における判定結果に基づいて動作モード決定部36による動作モードの切替条件を更新することができる。
《実施の形態3の変形例》
図15は、実施の形態3の変形例に係る機器診断システム350Aの構成を示すブロック図である。図15において、図10に示される構成要素と同一又は対応する構成要素には、図10に示される符号と同じ符号が付される。実施の形態3の変形例に係る機器診断システム350Aは、実施の形態2に係る機器診断装置200とサーバ50とによって構成されている点で、実施の形態3に係る機器診断システム350と相違する。これ以外の点については、実施の形態3の変形例に係る機器診断システム350Aは、実施の形態3に係る機器診断システム350と同じである。
図15は、実施の形態3の変形例に係る機器診断システム350Aの構成を示すブロック図である。図15において、図10に示される構成要素と同一又は対応する構成要素には、図10に示される符号と同じ符号が付される。実施の形態3の変形例に係る機器診断システム350Aは、実施の形態2に係る機器診断装置200とサーバ50とによって構成されている点で、実施の形態3に係る機器診断システム350と相違する。これ以外の点については、実施の形態3の変形例に係る機器診断システム350Aは、実施の形態3に係る機器診断システム350と同じである。
図15に示されるように、機器診断システム350Aは、機器診断装置200と、サーバ50とを備える。サーバ50は、ネットワークを介して機器診断装置200と通信する。サーバ50は、動作シーケンス決定部236と連携(共働)して漏電センサ10の動作シーケンスを決定する。これにより、異常判定部37における判定結果に基づいて動作シーケンス決定部236による動作シーケンスの切替条件を更新することができる。
図16は、実施の形態3の変形例に係る機器診断システム350Aの構成の他の例を示すブロック図である。図16に示されるように、機器診断システム350Aは、上述した図11に示される機器診断装置200Aとサーバ50とによって構成されていてもよい。
〈実施の形態3の変形例の効果〉
以上に説明した実施の形態3の変形例によれば、サーバ50は、動作シーケンス決定部236と連携して漏電センサ10の動作シーケンスを決定する。これにより、異常判定部37における判定結果に基づいて動作シーケンス決定部236による動作シーケンスの切替条件を更新することができる。
以上に説明した実施の形態3の変形例によれば、サーバ50は、動作シーケンス決定部236と連携して漏電センサ10の動作シーケンスを決定する。これにより、異常判定部37における判定結果に基づいて動作シーケンス決定部236による動作シーケンスの切替条件を更新することができる。
《実施の形態4》
図17は、実施の形態4に係る機器診断システム350Bの構成を示すブロック図である。図17において、図1及び6に示される構成要素と同一又は対応する構成要素が含まれ、その構成要素には図1及び6に示される符号と同じ符号が付される。実施の形態4は、複数の機器診断装置100が互いにネットワークを構成し、ネットワークを介して連携した複数の機器診断装置100が異常判定部37及び動作モード決定部36の動作を決定づける点で、実施の形態1、3と相違する。これ以外の点については、実施の形態4は、実施の形態1、3と同じである。複数の機器診断装置100によって、機器診断装置100とネットワークを介して機器診断装置100と通信する複数の別の機器診断装置群とが構成される。
図17は、実施の形態4に係る機器診断システム350Bの構成を示すブロック図である。図17において、図1及び6に示される構成要素と同一又は対応する構成要素が含まれ、その構成要素には図1及び6に示される符号と同じ符号が付される。実施の形態4は、複数の機器診断装置100が互いにネットワークを構成し、ネットワークを介して連携した複数の機器診断装置100が異常判定部37及び動作モード決定部36の動作を決定づける点で、実施の形態1、3と相違する。これ以外の点については、実施の形態4は、実施の形態1、3と同じである。複数の機器診断装置100によって、機器診断装置100とネットワークを介して機器診断装置100と通信する複数の別の機器診断装置群とが構成される。
図17に示されるように、機器診断システム350Bは、複数の機器診断装置100を備える。複数の機器診断装置100は、ネットワークを介して各機器診断装置100と通信する。ネットワークは、例えば、メッシュネットワークなどの無線ネットワークである。
ネットワーク上の各機器診断装置100は、特定の機器診断装置100の異常判定部37と連携(共働)して負荷機器1の診断を行う。また、同様にネットワーク上の各機器診断装置100は、特定の機器診断装置の動作モード決定部36と連携(共働)して漏電センサ10の動作モードを決定する。これにより、異常判定部37における判定結果に基づいて動作モード決定部36による切替条件を更新することができる。また、ネットワークを有しない構成(スタンドアローン型の構成)と比較して、様々なフィールドにおける情報が入力される各機器診断装置100の情報を活用することで、負荷機器1(図1参照)の診断にあたっての情報量が増えることにより、負荷機器1の診断の信頼性を高めることができる。更に、ネットワーク上の各機器診断装置100での分散処理による人工知能などを活用して、状態検知センサ20と漏電センサ10との相関関係を分析することで、負荷機器1の診断の信頼性を高めることができる。なお、特定の機器診断装置100の診断、分析終了後は、ネットワーク上の複数の機器診断装置100のうち一台を特定の機器診断装置100として、順次診断、分析を実行していく。
図18は、実施の形態4に係る機器診断システム350Bの構成の他の例を示すブロック図である。図18に示されるように、機器診断システム350は、実施の形態1の変形例に係る機器診断装置100A(図9及び図14に示される)によって構成されていてもよい。このとき、ネットワーク上の各機器診断装置100Aでの分散処理による人工知能などを活用して、周辺環境情報取得部20Aと漏電センサ10との相関関係を分析してもよい。
〈実施の形態4の効果〉
以上に説明した実施の形態4によれば、機器診断システム350Bは、複数の機器診断装置100、100Aがネットワークを介して通信を行い、複数の機器診断装置100、100Aが特定の機器診断装置100、100Aの異常判定部37と連携して負荷機器1の診断を行う。これにより、負荷機器1の診断の信頼性を高めることができ、また、サーバレス化できる。したがって、低コスト、サーバといった単一故障によるシステム障害の排除が可能であって、負荷機器1の診断が容易で且つ当該診断の信頼性が高い機器診断システム350Bを提供することができる。
以上に説明した実施の形態4によれば、機器診断システム350Bは、複数の機器診断装置100、100Aがネットワークを介して通信を行い、複数の機器診断装置100、100Aが特定の機器診断装置100、100Aの異常判定部37と連携して負荷機器1の診断を行う。これにより、負荷機器1の診断の信頼性を高めることができ、また、サーバレス化できる。したがって、低コスト、サーバといった単一故障によるシステム障害の排除が可能であって、負荷機器1の診断が容易で且つ当該診断の信頼性が高い機器診断システム350Bを提供することができる。
また、実施の形態4によれば、複数の機器診断装置100、100Aが特定の機器診断装置100、100Aの動作モード決定部36と連携して漏電センサ10の動作モードを決定する。これにより、異常判定部37における判定結果に基づいて動作モード決定部36による動作モードの切替条件を更新することができる。
《実施の形態4の変形例》
図19は、実施の形態4の変形例に係る機器診断システム350Cの構成を示すブロック図である。図19において、図10に示される構成要素と同一又は対応する構成要素が含まれ、その構成要素には、図10に示される符号と同じ符号が付される。実施の形態4の変形例に係る機器診断システム350Cは、実施の形態2に係る複数の機器診断装置200によって構成されている点で、実施の形態4に係る機器診断システム350Bと相違する。これ以外の点については、実施の形態4の変形例に係る機器診断システム350Cは、実施の形態4に係る機器診断システム350Bと同じである。
図19は、実施の形態4の変形例に係る機器診断システム350Cの構成を示すブロック図である。図19において、図10に示される構成要素と同一又は対応する構成要素が含まれ、その構成要素には、図10に示される符号と同じ符号が付される。実施の形態4の変形例に係る機器診断システム350Cは、実施の形態2に係る複数の機器診断装置200によって構成されている点で、実施の形態4に係る機器診断システム350Bと相違する。これ以外の点については、実施の形態4の変形例に係る機器診断システム350Cは、実施の形態4に係る機器診断システム350Bと同じである。
図19に示されるように、機器診断システム350Cは、複数の機器診断装置200を備える。複数の機器診断装置200は、ネットワークを介して各機器診断装置200と通信する。ネットワーク上の各機器診断装置200は、特定の機器診断装置200の動作シーケンス決定部236と連携(共働)して漏電センサ10の動作シーケンスを決定する。これにより、異常判定部37における判定結果に基づいて動作シーケンス決定部236による動作シーケンスの切替条件を更新することができる。
図20は、実施の形態4の変形例に係る機器診断システム350Cの構成の他の例を示すブロック図である。図20に示されるように、機器診断システム350Cは、上述した図11に示される機器診断装置200A(図11及び図16に示される)によって構成されていてもよい。
〈実施の形態4の変形例の効果〉
以上に説明した実施の形態4の変形例によれば、複数の機器診断装置200、200Aがネットワークを介して通信を行い、複数の機器診断装置200、200Aが特定の機器診断装置200、200Aの動作シーケンス決定部236と連携して漏電センサ10の動作シーケンスを決定する。これにより、異常判定部37における判定結果に基づいて動作シーケンス決定部236による動作シーケンスの切替条件を更新することができる。
以上に説明した実施の形態4の変形例によれば、複数の機器診断装置200、200Aがネットワークを介して通信を行い、複数の機器診断装置200、200Aが特定の機器診断装置200、200Aの動作シーケンス決定部236と連携して漏電センサ10の動作シーケンスを決定する。これにより、異常判定部37における判定結果に基づいて動作シーケンス決定部236による動作シーケンスの切替条件を更新することができる。
1 負荷機器、 2 電源部、 3a、3b、3c 電線ケーブル、 9 アース、 10 漏電センサ、 11 磁性体コア、 11a 中空部、 12 励磁コイル、 13 検出コイル、 20 状態検知センサ、 20A 周辺環境情報取得部、 30、30A、230 制御装置、 31 漏電センサ駆動部、 32 第1の信号収集部、 33 第1の信号処理部、 34 第2の信号収集部、 35 第2の信号処理部、 36 動作モード決定部、 37 異常判定部、 50 サーバ、 100、100A、200、200A 機器診断装置、 236 動作シーケンス決定部、 350、350A、350B、350C 機器診断システム。
Claims (16)
- 電源部から電路を通して供給される電力によって駆動する負荷機器の診断を行う機器診断装置であって、
前記電路から漏洩する電流に応じた波形の検出信号を出力する漏電センサと、
前記負荷機器の状態又は前記負荷機器の周辺環境の少なくとも一方である機器状態を取得する機器状態取得部と、
前記機器状態取得部から出力される状態信号に基づいて前記漏電センサの動作モードを、通常時の漏電検出用の動作モード又は異常診断用の動作モードに決定する動作モード決定部と、
前記漏電センサを前記動作モード決定部によって決定された前記動作モードで動作させる漏電センサ駆動部と、
前記漏電センサから出力される前記検出信号と前記機器状態取得部から出力される前記状態信号とに基づいて前記診断を行う診断部と
を有し、
前記動作モード決定部は、前記漏電センサが前記通常時の漏電検出用の動作モードで動作しているときに前記機器状態が予め定められた切替条件を満たす場合、前記漏電センサの動作モードを前記異常診断用の動作モードに切り替える、
ことを特徴とする機器診断装置。 - 前記漏電センサが前記異常診断用の動作モードで動作するときの電流検出感度は、前記漏電センサが前記通常時の漏電検出用の動作モードで動作するときの電流検出感度より高い、
ことを特徴とする請求項1に記載の機器診断装置。 - 前記漏電センサが前記異常診断用の動作モードで動作するときの周波数帯域は、前記漏電センサが前記通常時の漏電検出用の動作モードで動作するときの周波数帯域より広い、
ことを特徴とする請求項1又は2に記載の機器診断装置。 - 前記機器状態取得部は、前記負荷機器で発生した振動又は音に応じた信号を前記状態信号として出力し、
前記動作モード決定部は、前記信号の振幅が予め定められた閾値以上である場合に前記切替条件を満たすと判断して、前記漏電センサの動作モードを前記異常診断用の動作モードに切り替える、
ことを特徴とする請求項1から3のいずれか1項に記載の機器診断装置。 - 前記動作モード決定部は、前記信号の振幅が前記閾値未満である場合に前記切替条件を満たさないと判断して、前記漏電センサの動作モードを前記通常時の漏電検出用の動作モードに維持する、
ことを特徴とする請求項4に記載の機器診断装置。 - 前記機器状態取得部は、前記負荷機器の振動を測定する振動センサ、前記負荷機器の温度を測定する温度センサ又は赤外線センサ、前記負荷機器の動きを検出するモーションセンサ、前記負荷機器の動作時の異音を検出する異音センサ、前記負荷機器における放電の有無を検出する電磁波センサ、前記負荷機器における漏水の有無を検出する漏水センサ、及び前記負荷機器における漏油の有無を検出する漏油センサ及び前記負荷機器における発煙の有無を検出する発煙センサのうちの少なくとも1つを有する、
ことを特徴とする請求項1から5のいずれか1項に記載の機器診断装置。 - 前記機器状態取得部は、前記負荷機器の電気ノイズまたは電磁気ノイズを測定するノイズ計である、
ことを特徴とする請求項1から5のいずれか1項に記載の機器診断装置。 - 前記機器状態取得部によって取得される前記負荷機器の周辺環境は、前記負荷機器が設置される設置場所における天候、前記設置場所における雨量、前記設置場所における照度、前記設置場所における風速、前記設置場所における温度及び前記設置場所における湿度のうちの少なくとも1つを含む、
ことを特徴とする請求項1から7のいずれか1項に記載の機器診断装置。 - 前記異常診断用の動作モードは、第1の計測ダイナミックレンジで動作する第1の異常診断モードと、第2の計測ダイナミックレンジで動作する第2の異常診断モードとを有し、
前記動作モード決定部は、前記切替条件を満たす場合、前記通常時の漏電検出用の動作モードから前記第1の異常診断モードへの切り替え、前記第1の異常診断モードから前記第2の異常診断モードへの切り替え、前記第2の異常診断モードから前記通常時の漏電検出用の動作モードへの切り替えを順に行う、
ことを特徴とする請求項1から8のいずれか1項に記載の機器診断装置。 - 前記漏電センサは、
鉄心部と、
前記鉄心部に巻き付けられていて且つ前記漏電センサ駆動部から印加される駆動電流である励磁電流が流れる第1のコイルと、
前記鉄心部に巻き付けられていて且つ前記励磁電流によって発生する誘導起電力を示す信号を前記検出信号として出力する第2のコイルと
を有する、
ことを特徴とする請求項1から9のいずれか1項に記載の機器診断装置。 - 前記漏電センサ駆動部は、前記励磁電流の電流値、前記励磁電流の周波数及び前記励磁電流の波形の少なくとも1つを制御することで、前記漏電センサを、前記動作モード決定部によって決定された動作モードで動作させる、
ことを特徴とする請求項10に記載の機器診断装置。 - 前記診断部における前記診断の結果を報知する報知部を更に有する、
ことを特徴とする請求項1から11のいずれか1項に記載の機器診断装置。 - 請求項1から12のいずれか1項に記載の前記機器診断装置と、
ネットワークを介して前記機器診断装置と通信するサーバと
を有し、
前記サーバは、前記診断部と連携して前記負荷機器の前記診断を行う、
ことを特徴とする機器診断システム。 - 前記サーバは、前記動作モード決定部と連携して前記漏電センサの動作モードを決定する、
請求項13に記載の機器診断システム。 - 請求項1から12のいずれか1項に記載の前記機器診断装置と、
ネットワークを介して前記機器診断装置と通信する複数の別の機器診断装置群と
を有し、
前記機器診断装置群は、個々の前記診断部を連携して前記負荷機器の前記診断を行う、
ことを特徴とする機器診断システム。 - 前記機器診断装置群は、前記動作モード決定部と連携して前記漏電センサの動作モードを決定する、
請求項15に記載の機器診断システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024507500A JPWO2023176039A1 (ja) | 2022-03-17 | 2022-11-11 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022042713 | 2022-03-17 | ||
| JP2022-042713 | 2022-03-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023176039A1 true WO2023176039A1 (ja) | 2023-09-21 |
Family
ID=88023204
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/042020 WO2023176039A1 (ja) | 2022-03-17 | 2022-11-11 | 機器診断装置及び機器診断システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2023176039A1 (ja) |
| WO (1) | WO2023176039A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61138178A (ja) * | 1984-12-11 | 1986-06-25 | Tokyo Gas Co Ltd | 地絡検出装置 |
| JPH11311653A (ja) * | 1998-04-28 | 1999-11-09 | Micron Kk | 漏電電流検出器 |
| JP2010213400A (ja) * | 2009-03-09 | 2010-09-24 | Tsuru Gakuen | 需要家構内の電力系統における地絡事故原因判定装置 |
| JP2012200052A (ja) * | 2011-03-18 | 2012-10-18 | Panasonic Corp | 漏電判定装置 |
| WO2018158910A1 (ja) * | 2017-03-02 | 2018-09-07 | 株式会社日立製作所 | 診断装置および診断方法 |
| JP2019109192A (ja) * | 2017-12-20 | 2019-07-04 | 株式会社日立産機システム | 絶縁監視装置および絶縁監視システム |
| WO2019193743A1 (ja) * | 2018-04-06 | 2019-10-10 | 三菱電機株式会社 | 漏電検出装置および漏電遮断器 |
-
2022
- 2022-11-11 WO PCT/JP2022/042020 patent/WO2023176039A1/ja active Application Filing
- 2022-11-11 JP JP2024507500A patent/JPWO2023176039A1/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61138178A (ja) * | 1984-12-11 | 1986-06-25 | Tokyo Gas Co Ltd | 地絡検出装置 |
| JPH11311653A (ja) * | 1998-04-28 | 1999-11-09 | Micron Kk | 漏電電流検出器 |
| JP2010213400A (ja) * | 2009-03-09 | 2010-09-24 | Tsuru Gakuen | 需要家構内の電力系統における地絡事故原因判定装置 |
| JP2012200052A (ja) * | 2011-03-18 | 2012-10-18 | Panasonic Corp | 漏電判定装置 |
| WO2018158910A1 (ja) * | 2017-03-02 | 2018-09-07 | 株式会社日立製作所 | 診断装置および診断方法 |
| JP2019109192A (ja) * | 2017-12-20 | 2019-07-04 | 株式会社日立産機システム | 絶縁監視装置および絶縁監視システム |
| WO2019193743A1 (ja) * | 2018-04-06 | 2019-10-10 | 三菱電機株式会社 | 漏電検出装置および漏電遮断器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023176039A1 (ja) | 2023-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2946139C (en) | Smart sensor network for power grid health monitoring | |
| AU695413B2 (en) | Monitoring of internal partial discharges on a power transformer | |
| US9910093B2 (en) | Generator neutral ground monitoring device utilizing direct current component measurement and analysis | |
| CN101208845B (zh) | 故障电流分析器和具有故障电流检测功能的装置 | |
| US7081760B2 (en) | Method of diagnosing a broken bar fault in an induction motor | |
| US11041915B2 (en) | Disturbance detecting current sensor | |
| US20150276823A1 (en) | Method For Detecting A Fault Condition In An Electrical Machine | |
| CN103148928B (zh) | 基于机电量关联分析的发电机定子端部绕组劣化诊断方法 | |
| JPWO2014156386A1 (ja) | 電動機の診断装置および開閉装置 | |
| US11243267B2 (en) | Ground-wall insulation aging monitoring and locating method for converter transformer | |
| CN102624325A (zh) | 具有电流传感器的扼流器 | |
| CN109283433A (zh) | 一种针对局部放电和接地环流的电缆联合检测装置及方法 | |
| EP3073634B1 (en) | A method for determining the operating status of a spring charging motor for a lv or mv switching apparatus and a diagnostic system implementing said method | |
| Goktas et al. | Separation of induction motor rotor faults and low frequency load oscillations through the radial leakage flux | |
| WO2023176039A1 (ja) | 機器診断装置及び機器診断システム | |
| CN106908688B (zh) | 一种便携式电力变压器绕组故障实时诊断设备 | |
| CN102650654A (zh) | 一种电力变压器铁芯、夹件接地电流监测装置运行性能在线测评方法 | |
| CN110058117B (zh) | 一种基于外包封振动分布的电抗器匝间短路故障检测方法 | |
| JPH0670665B2 (ja) | 非接触電界磁界センサ | |
| JP2016206054A (ja) | 漏電検出装置及び漏電検出方法 | |
| CN118829895A (zh) | 设备诊断装置和设备诊断系统 | |
| JPH09101340A (ja) | 配電系統の間欠地絡位置標定方法と絶縁劣化監視方法 | |
| JPH04220573A (ja) | 低圧系統活線絶縁劣化監視方法 | |
| CN221926472U (zh) | 便携式电力变压器铁芯接地双电流检测装置 | |
| CN112736835B (zh) | 剩余电流保护装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22932302 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024507500 Country of ref document: JP |