WO2023120526A1 - 手術支援システムおよび手術支援ロボット - Google Patents
手術支援システムおよび手術支援ロボット Download PDFInfo
- Publication number
- WO2023120526A1 WO2023120526A1 PCT/JP2022/046911 JP2022046911W WO2023120526A1 WO 2023120526 A1 WO2023120526 A1 WO 2023120526A1 JP 2022046911 W JP2022046911 W JP 2022046911W WO 2023120526 A1 WO2023120526 A1 WO 2023120526A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- arm
- surgical instrument
- robot arm
- robot
- support system
- Prior art date
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
Definitions
- FIG. 10 is a perspective view of an adapter and a surgical instrument according to one embodiment as seen from the Y2 direction side; It is a control block diagram of a surgical assistance robot according to one embodiment.
- FIG. 4 is a control block diagram of a robotic arm according to one embodiment;
- FIG. 4 illustrates a serial connection between a controller and a substrate according to one embodiment;
- FIG. 5 is a cross-sectional view taken along line 300-300 of FIG. 4;
- the surgical assistance robot 1 includes a medical cart 3 , a positioner 40 , an arm base 50 , a plurality of robot arms 60 and an arm manipulator 80 .
- an adapter 220 is attached to the connecting portion 4g arranged on the Y2 direction side of the surgical instrument 4.
- the connecting portion 4g is arranged in the housing 4h and attached to the robot arm 60 via the adapter 220.
- the servo motor M2 of the robot arm 60 is attached to the connecting portion 220b arranged on the Y2 direction side of the adapter 220.
- the surgical instrument 4 is attached to the connecting portion 220a arranged on the Y1 direction side of the adapter 220.
- An adapter 220 is attached to the connecting portion 76 arranged on the Y1 direction side of the servo motor M2.
- the robot arm 60 is covered by a drape 210 for use in clean areas.
- cleaning operations are performed in order to prevent the surgically incised portion and the medical equipment from being contaminated with pathogenic bacteria, foreign substances, and the like.
- a clean area and a contaminated area which is an area other than the clean area, are set.
- the surgical site is placed in a clean area.
- Surgical team members, including the operator, should ensure that only sterile objects are in the clean area during surgery, and should remove objects from contaminated areas when moving them into the clean area. should be sterilized.
- the substrate 140 is arranged on the second link portion 73 .
- the distance between the arm operating section 80 and the board 140 is relatively small, so that the influence of noise on the signal input from the arm operating section 80 to the board 140 can be reduced.
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- Surgery (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
この手術支援システム(100)は、ロボットアーム(60)またはアーム操作部(80)に配置され、アーム操作部(80)により受け付けられた信号が入力される基板(140)と、制御部(31a)とを備える。制御部(31a)と基板(140)との間は、第1配線(141)によりシリアル通信接続されている。
Description
本開示は、手術支援システムおよび手術支援ロボットに関する。
従来、手術支援システムが開示されている。特開2019-162427号公報には、手術用器具と、アームとを備えるロボットシステムが開示されている。手術用器具は、アームの先端に配置されている。アームから離間した位置には、操作部が配置されている。操作部には、ジョイスティックや操作ボタンが配置されている。操作者が操作部を操作することによって、アームが移動する。通常、操作部からの信号を伝達する配線は、ロボットシステムを制御する制御部に接続されている。配線は、ジョイスティックや操作ボタンの数の分だけ必要になる。
上記のように、操作部から制御部まで延びる配線が、ジョイスティックや操作ボタンの数の分だけ必要になる場合、操作部から制御部までの配線が太く重くなる上、屈曲負荷も増大するため、特にロボットアームの先端に操作部を配置する場合、構造体も駆動部も大型の物を選択せざるを得ず、小型化に影響を与える。このため、制御部まで延びる配線の数の削減が望まれている。
本開示は、上述の課題を解決するためになされたものであり、制御部まで延びる配線の数を削減することが可能な手術支援システムおよび手術支援ロボットを提供することである。
本開示の第1の局面による手術支援システムは、手術器具が取り付けられるロボットアームと、ロボットアームに取り付けられ、ロボットアームを操作するアーム操作部と、ロボットアームまたはアーム操作部に配置され、アーム操作部により受け付けられた信号が入力される基板と、制御部とを備え、制御部と基板との間は、第1配線によりシリアル通信接続されている。
本開示の第1の局面による手術支援システムでは、上記のように、アーム操作部により受け付けられた信号が入力される基板と、制御部との間は、第1配線によりシリアル通信接続されている。これにより、アーム操作部にジョイスティックや操作ボタンなどが配置されても、ジョイスティックや操作ボタンなどから延びる配線は基板に接続される一方、基板と制御部との間は、シリアル通信接続されている。その結果、ジョイスティックや操作ボタンなどを各々制御部に接続する場合に比べて配線の数を削減できる。
本開示の第2の局面による手術支援ロボットは、手術器具が取り付けられるロボットアームと、ロボットアームに取り付けられ、ロボットアームを操作するアーム操作部と、ロボットアームまたはアーム操作部に配置され、アーム操作部により受け付けられた信号が入力される基板と、制御部とを備え、制御部と基板との間は、配線によりシリアル通信接続されている。
本開示の第2の局面による手術支援ロボットでは、上記のように、アーム操作部により受け付けられた信号が入力される基板と、制御部との間は、配線によりシリアル通信接続されている。これにより、アーム操作部にジョイスティックや操作ボタンなどが配置されても、ジョイスティックや操作ボタンなどから延びる配線は基板に接続される一方、基板と制御部との間は、シリアル通信接続されている。その結果、ジョイスティックや操作ボタンなどを各々制御部に接続する場合に比べて配線の数を削減することが可能な手術支援ロボットを提供することができる。
本開示によれば、制御部まで延びる配線の数を削減できる。
(手術支援システムの構成)
図1~図14を参照して、本実施形態による手術支援システム100の構成について説明する。手術支援システム100は、手術支援ロボット1と、遠隔操作装置2とを備えている。
図1~図14を参照して、本実施形態による手術支援システム100の構成について説明する。手術支援システム100は、手術支援ロボット1と、遠隔操作装置2とを備えている。
手術支援ロボット1は、患者P側装置である。手術支援ロボット1は、医療用台車3を備えており、移動可能である。手術支援ロボット1は、手術室内に配置されている。遠隔操作装置2は、手術支援ロボット1を操作するための操作者側装置である。手術支援ロボット1から離間した位置に配置されており、手術支援ロボット1は、遠隔操作装置2により遠隔操作される。医師などの操作者は、手術支援ロボット1に所望の動作を行わせるための指令を遠隔操作装置2に入力する。遠隔操作装置2は、入力された指令を手術支援ロボット1に送信する。手術支援ロボット1は、受信した指令に基づいて動作する。手術支援ロボット1は、滅菌された滅菌野である手術室内に配置されている。
(手術支援ロボットの構成)
図1に示すように、手術支援ロボット1は、医療用台車3と、ポジショナ40と、アームベース50と、複数のロボットアーム60と、アーム操作部80と、を備えている。
図1に示すように、手術支援ロボット1は、医療用台車3と、ポジショナ40と、アームベース50と、複数のロボットアーム60と、アーム操作部80と、を備えている。
医療用台車3は、ポジショナ40を移動させる。医療用台車3は、入力装置33を含む。入力装置33は、主に施術前に手術の準備を行うために、ポジショナ40、アームベース50、および、複数のロボットアーム60の移動や姿勢の変更の操作を受け付ける。入力装置33には、表示部33aが設けられている。表示部33aは、たとえば、液晶パネルである。医療用台車3は、操作ハンドル34、スロットル34a、図11に示される、ジョイスティック34b、スタビライザ34cおよび電動シリンダ34dを含む。操作ハンドル34およびスロットル34aは、操作者による操舵を受け付ける。ジョイスティック34bは、ポジショナ40を移動するための操作を受け付ける。
図2に示すように、ポジショナ40は、たとえば、7軸多関節ロボットからなる。ポジショナ40は、医療用台車3上に配置されている。ポジショナ40は、アームベース50の位置を調整する。ポジショナ40は、アームベース50の位置を3次元に移動させる。
ポジショナ40は、ベース部41と、ベース部41に連結された複数のリンク部42とを含む。複数のリンク部42同士は、関節部43により連結されている。
アームベース50は、ポジショナ40の先端に取り付けられている。複数のロボットアーム60は、各々のロボットアーム60の基端が、アームベース50に取り付けられている。複数のロボットアーム60は、折り畳まれた収納姿勢をとることが可能である。アームベース50と、複数のロボットアーム60とは、滅菌ドレープにより覆われて使用される。また、ロボットアーム60は、手術器具4を支持する。
アームベース50には、図11に示される、ステータスインジケータ51およびアームステータスインジケータ52が配置されている。ステータスインジケータ51は、手術支援システム100の状態を表示する。アームステータスインジケータ52は、ロボットアーム60の状態を表示する。
図1に示すように、ロボットアーム60は、複数配置されている。具体的には、4つのロボットアーム60a、60b、60cおよび60dが配置されている。ロボットアーム60a、60b、60cおよび60dは、互いに同様の構成を有する。
図3に示すように、ロボットアーム60は、アーム部61と、第1リンク部72と、第2リンク部73と、並進移動機構部70とを含む。ロボットアーム60は、回転軸線としてのJT1~JT7軸線と、直動軸線としてのJ8軸線とを有する。JT1~JT7軸線は、アーム部61の関節部64の回転軸線である。また、JT7軸線は、第1リンク部72の回転軸線である。JT8軸線は、並進移動機構部70が、第2リンク部73を第1リンク部72に対してZ方向に沿って相対的に移動させる直動軸線である。すなわち、図12に示すサーボモータM1は、ロボットアーム60のJT1からJT7軸線毎に配置されている。サーボモータM3は、JT8軸線に対して配置されている。
アーム部61は、7軸多関節ロボットアームからなる。第1リンク部72は、アーム部61の先端に配置されている。第2リンク部73には、後述するアーム操作部80が取り付けられる。並進移動機構部70は、第1リンク部72と第2リンク部73との間に配置されている。第2リンク部73には、手術器具4を保持するホルダ71が配置されている。
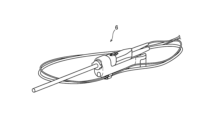
複数のロボットアーム60の各々の先端には、手術器具4が取り付けられている。手術器具4は、たとえば、取り換え可能なインストゥルメント、手術部位の画像を取り込むための内視鏡6などを含む。インストゥルメントとしての手術器具4は、被駆動ユニット4aと鉗子4bとを接続するシャフト4cを含む。被駆動ユニット4aと、シャフト4cと、鉗子4bとは、Z方向に沿って配置されている。
図1に示すように、複数のロボットアーム60のうちの一つの、たとえば、ロボットアーム60cの先端には内視鏡6が取り付けられ、残りの、たとえば、ロボットアーム60a、60bおよび60dの先端には、内視鏡6以外の手術器具4が取り付けられる。内視鏡6は、互いに隣り合うように配置されている4つのロボットアーム60のうちの、中央に配置される2つのロボットアーム60bおよび60cのうちのいずれかに取り付けられる。
(インストゥルメントの構成)
図3に示すように、インストゥルメントの先端には、たとえば、鉗子4bが設けられている。インストゥルメントの先端には、鉗子4b以外に、関節を有する器具として、ハサミ、グラスパー、ニードルホルダ、マイクロジセクター、ステーブルアプライヤー、タッカー、吸引洗浄ツール、スネアワイヤ、および、クリップアプライヤーなどが配置される。インストゥルメントの先端には、関節を有しない器具として、切断刃、焼灼プローブ、洗浄器、カテーテル、および、吸引オリフィスなどが配置される。
図3に示すように、インストゥルメントの先端には、たとえば、鉗子4bが設けられている。インストゥルメントの先端には、鉗子4b以外に、関節を有する器具として、ハサミ、グラスパー、ニードルホルダ、マイクロジセクター、ステーブルアプライヤー、タッカー、吸引洗浄ツール、スネアワイヤ、および、クリップアプライヤーなどが配置される。インストゥルメントの先端には、関節を有しない器具として、切断刃、焼灼プローブ、洗浄器、カテーテル、および、吸引オリフィスなどが配置される。
(アーム操作部の構成)
図4に示すように、アーム操作部80は、ロボットアーム60に取り付けられており、ロボットアーム60を操作する。具体的には、アーム操作部80は、第2リンク部73に取り付けられている。
図4に示すように、アーム操作部80は、ロボットアーム60に取り付けられており、ロボットアーム60を操作する。具体的には、アーム操作部80は、第2リンク部73に取り付けられている。
アーム操作部80は、イネーブルスイッチ81と、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86と、モード切替ボタン84と、モードインジケータ84aとを含む。
イネーブルスイッチ81は、ジョイスティック82およびリニアスイッチ83によるロボットアーム60の移動を許可または不許可とする。イネーブルスイッチ81は、看護師、助手などの操作者がアーム操作部80を把持して押下されることによりロボットアーム60による手術器具4の移動を許可する状態となる。
ジョイスティック82は、ロボットアーム60による手術器具4の移動を操作するための操作具である。ジョイスティック82は、ロボットアーム60の移動方向および移動速度を操作する。ジョイスティック82が倒された方向および倒された角度に応じて、ロボットアーム60が移動される。
リニアスイッチ83は、手術器具4の長手方向に沿った方向にロボットアーム60による手術器具4の移動を操作するためのスイッチである。リニアスイッチ83は、手術器具4を患者Pに挿入する方向に移動させるリニアスイッチ83aと、手術器具4を患者Pから離間するに方向に移動させるリニアスイッチ83bとを含む。リニアスイッチ83aとリニアスイッチ83bとは、共に、押しボタンスイッチからなる。
ピボットボタン85は、ロボットアーム60に取り付けられた手術器具4の移動の支点となるピボット位置PPを設定するためのボタンである。図5に示される内視鏡6または図6に示されるピボット位置設定器具7の先端が、図8に示す患者Pの体表面Sに挿入されたトロカールTの挿入位置に対応する位置まで移動された状態で、ピボットボタン85が押下されることによりピボット位置PPが設定され、図11に示す記憶部32に記憶される。ピボット位置PPの設定において、ピボット位置PPは、1つの点として設定され、ピボット位置PPの設定は、手術器具4の方向を設定するものではない。ピボット位置PPは、複数のロボットアーム60毎に個別に設定される。
図4に示すように、アジャストメントボタン86は、ロボットアーム60の位置を最適化するためのボタンである。内視鏡6が取り付けられたロボットアーム60に対するピボット位置PPの設定後、アジャストメントボタン86が押下されることにより、他のロボットアーム60およびアームベース50の位置が最適化される。
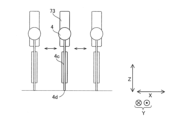
モード切替ボタン84は、手術器具4を図7に示す並進移動させるモードと図8に示す回転移動させるモードとを切り替えるためのボタンである。図7に示すように、ロボットアーム60を並進移動させるモードでは、手術器具4の先端4dが、X-Y平面上において移動するように、ロボットアーム60が移動される。図8に示すように、ロボットアーム60を回転移動させるモードでは、ピボット位置PPが設定されていない時は、鉗子4bを中心に回転移動し、ピボット位置PPが設定されている時は、ピボット位置PPを支点として手術器具4が回転移動するように、ロボットアーム60が移動される。なお、手術器具4のシャフト4cがトロカールTに挿入された状態で、手術器具4が回転移動される。モード切替ボタン84は、アーム操作部80のZ方向側の面に配置されている。
モードインジケータ84aは、切り替えられたモードを表示する。モードインジケータ84aの点灯は、回転移動モードを表し、消灯は、並進移動モードを表す。また、モードインジケータ84aは、ピボット位置PPが設定されたことを表示するピボット位置インジケータを兼ねている。モードインジケータ84aは、アーム操作部80のZ方向側の面に配置されている。
(手術器具、アダプタ、ドレープおよびアームの構成)
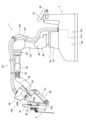
図9に示すように、手術器具4は、ロボットアーム60にアダプタ220を介して取り外し可能に接続される。アダプタ220は、ロボットアーム60のサーボモータM2と、手術器具4との間に配置される。アダプタ220は、ドレープ210を保持するためのドレープアダプタであり、手術のたびにユーザにより交換される。これにより、アダプタ220を利用してドレープ210を保持することができる。ドレープ210は、ロボットアーム60を覆うためのドレープであり、滅菌処理されている。アダプタ220は、ロボットアーム60との間にドレープ210を挟み込む。
図9に示すように、手術器具4は、ロボットアーム60にアダプタ220を介して取り外し可能に接続される。アダプタ220は、ロボットアーム60のサーボモータM2と、手術器具4との間に配置される。アダプタ220は、ドレープ210を保持するためのドレープアダプタであり、手術のたびにユーザにより交換される。これにより、アダプタ220を利用してドレープ210を保持することができる。ドレープ210は、ロボットアーム60を覆うためのドレープであり、滅菌処理されている。アダプタ220は、ロボットアーム60との間にドレープ210を挟み込む。
図10に示すように、手術器具4のY2方向側に配置された接続部4gには、アダプタ220が取り付けられる。接続部4gは、ハウジング4hに配置されており、アダプタ220を介してロボットアーム60に取り付けられる。アダプタ220のY2方向側に配置された接続部220bには、ロボットアーム60のサーボモータM2が取り付けられる。図9に示すように、アダプタ220のY1方向側に配置された接続部220aには、手術器具4が取り付けられる。サーボモータM2のY1方向側に配置された接続部76には、アダプタ220が取り付けられる。
図10に示すように、手術器具4は、手術器具4の情報を記憶する記憶部4kを含む。手術器具4の情報とは、たとえば、内視鏡6や鉗子4bなどの手術器具4の種類を示す情報である。
図9に示すように、ロボットアーム60は、清潔区域において使用されるため、ドレープ210により覆われる。ここで、手術室では、手術により切開した部分および医療機器が病原菌や異物などにより汚染されることを防ぐため、清潔操作が行われる。この清潔操作においては、清潔区域および清潔区域以外の区域である汚染区域が設定される。手術部位は、清潔区域に配置される。操作者を含む手術チームのメンバーは、手術中、清潔区域に殺菌されている物体のみが位置するよう配慮し、かつ、汚染区域に位置している物体を清潔区域に移動させる場合は、この物体に滅菌処理を施す。同様に、操作者を含む手術チームのメンバーがその手を汚染区域に位置させたときは、清潔区域に位置している物体に直接接触する前に、手の滅菌処理を行う。清潔区域において用いられる器具は、滅菌処理が行われる、または、滅菌処理されたドレープ210により覆われる。
ドレープ210は、ロボットアーム60を覆う本体部211と、サーボモータM2とアダプタ220との間に挟み込まれる取付部212と、を備えている。本体部211は、フィルム状に形成された可撓性フィルム部材からなる。可撓性フィルム部材は、熱可塑性ポリウレタンやポリエチレンなどの樹脂材料からなっている。本体部211には、ロボットアーム60のサーボモータM2とアダプタ220とが互いに係合可能なように、開口部が形成されている。本体部211には、取付部212が配置されている。取付部212は、樹脂成形部材からなる。樹脂成形部材は、ポリエチレンテレフタレートなどの樹脂材料からなる。取付部212は、本体部211に比べて硬く形成されている。取付部212は、サーボモータM2とアダプタ220とが互いに係合可能なように、開口部が形成されている。取付部212の開口部は、サーボモータM2とアダプタ220との係合する部分に対応するように設けられていてもよい。取付部212の開口部は、サーボモータM2とアダプタ220との複数の係合する部分に対応するように複数個設けられていてもよい。
図9に示すように、アダプタ220は、アダプタ本体部221と、アダプタ本体部221にY方向に延びる回転軸線周りに回転可能に保持された複数の駆動伝達部222とを有する。複数の駆動伝達部222は、アダプタ本体部221に回転軸線周りに回転可能に配置されている。駆動伝達部222は、図10に示す手術器具4の複数の被駆動部材4iに対応するように複数配置されている。駆動伝達部222は、ロボットアーム60からの駆動力を手術器具4の被駆動部材4iに伝達する。駆動伝達部222は、手術器具4の被駆動部材4iの嵌合凸部4jと嵌合する嵌合凹部222aを含んでいる。嵌合凹部222aは、駆動伝達部222のY1方向側の表面からY2方向側に向かって窪むように形成されている。
図10に示すように、駆動伝達部222は、サーボモータM2の嵌合凸部75aと嵌合する嵌合凹部222bを含んでいる。嵌合凹部222bは、駆動伝達部222のY2方向側の表面からY1方向側に向かって窪むように形成されている。
(遠隔操作装置)
図1に示すように、遠隔操作装置2は、たとえば、手術室の中または手術室の外に配置されている。遠隔操作装置2は、アーム121および操作ハンドル21を含む操作部120と、フットペダル22と、タッチパネル23と、モニタ24と、支持アーム25と、支持バー26とを含む。操作部120は、医師などの操作者が指令を入力するための操作用のハンドルを構成する。
図1に示すように、遠隔操作装置2は、たとえば、手術室の中または手術室の外に配置されている。遠隔操作装置2は、アーム121および操作ハンドル21を含む操作部120と、フットペダル22と、タッチパネル23と、モニタ24と、支持アーム25と、支持バー26とを含む。操作部120は、医師などの操作者が指令を入力するための操作用のハンドルを構成する。
操作ハンドル21は、手術器具4を操作するためのハンドルである。また、操作ハンドル21は、手術器具4に対する操作量を受け付ける。操作ハンドル21は、医師などの操作者から見て、左側に配置され、操作者の左手により操作される操作ハンドル21Lと、右側に配置され、操作者の右手により操作される操作ハンドル21Rと、を含んでいる。
図1に示すように、モニタ24は、内視鏡6によって取り込まれた画像を表示するためのスコープ型表示装置である。支持アーム25は、モニタ24の高さを医師などの操作者の顔の高さに合わせるようにモニタ24を支持する。タッチパネル23は、支持バー26に配置されている。モニタ24近傍に設けられたセンサにより操作者の頭部を検知することにより手術支援ロボット1は遠隔操作装置2による操作が可能になる。操作者は、モニタ24により患部を視認しながら、操作ハンドル21およびフットペダル22を操作する。これにより、遠隔操作装置2に指令が入力される。遠隔操作装置2に入力された指令は、手術支援ロボット1に送信される。
(制御系の構成)
図11に示すように、手術支援システム100は、制御装置130と、アーム制御部31aと、ポジショナ制御部31bと、操作制御部110とを備えている。
図11に示すように、手術支援システム100は、制御装置130と、アーム制御部31aと、ポジショナ制御部31bと、操作制御部110とを備えている。
本実施形態では、制御装置130は、医療用台車3の内部においてアーム制御部31aおよびポジショナ制御部31bと通信するように配置され、手術支援システム100の全体を制御する。具体的には、制御装置130は、アーム制御部31a、ポジショナ制御部31b、および、操作制御部110の各々と通信し、制御する。制御装置130と、アーム制御部31a、ポジショナ制御部31b、および、操作制御部110とは、LANなどによって接続されている。制御装置130、アーム制御部31aおよびポジショナ制御部31bは、医療用台車3の内部に配置されている。
アーム制御部31aは、複数のロボットアーム60ごとに配置されている。すなわち、医療用台車3の内部には、複数のロボットアーム60の数に対応した複数のアーム制御部31aが配置されている。
図11に示すように、入力装置33は、制御装置130にLANなどによって接続されている。ステータスインジケータ51、アームステータスインジケータ52、操作ハンドル34、スロットル34a、ジョイスティック34b、スタビライザ34cおよび電動シリンダ34dと、ポジショナ制御部31bとは、配線145によって、互いの情報を共有可能な通信ネットワークによりシリアル通信接続されている。なお、図11では、1つの配線145に、ステータスインジケータ51、アームステータスインジケータ52などの全てが接続されているように記載されているが、実際には、ステータスインジケータ51、アームステータスインジケータ52、操作ハンドル34、スロットル34a、ジョイスティック34b、スタビライザ34cおよび電動シリンダ34dごとに、配線145が配置されている。
図12に示すように、アーム部61には、複数の関節部64に対応するように、複数のサーボモータM1と、エンコーダE1と、減速機とが設けられている。エンコーダE1は、サーボモータM1の回転角を検出する。減速機は、サーボモータM1の回転を減速させてトルクを増大させる。サーボモータM1は、駆動部の一例である。エンコーダE1は、検知部の一例である。
医療用台車3の内部には、ロボットアーム60のサーボモータM1を制御するためのサーボ制御部C1がアーム制御部31aに隣接して配置されている。また、サーボ制御部C1には、サーボモータM1の回転角を検出するためのエンコーダE1が電気的に接続されている。
図12に示すように、第2リンク部73には、手術器具4の被駆動ユニット4aに配置された被駆動部材4iを回転させるためのサーボモータM2と、エンコーダE2と、減速機とが配置されている。エンコーダE2は、サーボモータM2の回転角を検出する。減速機は、サーボモータM2の回転を減速させてトルクを増大させる。また、医療用台車3には、手術器具4を駆動するサーボモータM2を制御するためのサーボ制御部C2が配置されている。サーボ制御部C2には、サーボモータM2の回転角を検出するためのエンコーダE2が電気的に接続されている。なお、サーボモータM2、エンコーダE2およびサーボ制御部C2は、各々複数配置されている。サーボモータM2は、駆動部の一例である。エンコーダE2は、検知部の一例である。
図12に示すように、並進移動機構部70には、手術器具4を並進移動させるためのサーボモータM3と、エンコーダE3と、減速機とが設けられている。エンコーダE3は、サーボモータM3の回転角を検出する。減速機は、サーボモータM3の回転を減速させてトルクを増大させる。また、医療用台車3には、手術器具4を並進移動するサーボモータM3を制御するためのサーボ制御部C3が配置されている。サーボ制御部C3には、サーボモータM3の回転角を検出するためのエンコーダE3が電気的に接続されている。サーボモータM3は、駆動部の一例である。エンコーダE3は、検知部の一例である。
図13に示すように、制御装置130は、アーム操作部80に受け付けられた操作に基づいてロボットアーム60を制御する。たとえば、制御装置130は、アーム操作部80のジョイスティック82に受け付けられた操作に基づいてロボットアーム60を制御する。具体的には、アーム制御部31aは、ジョイスティック82から入力された入力信号を制御装置130に出力する。制御装置130は受け取った入力信号と、エンコーダE1により検出された回転角とに基づいて位置指令を生成するとともに、アーム制御部31aを介して、位置指令をサーボ制御部C1に出力する。サーボ制御部C1は、アーム制御部31aから入力された位置指令と、エンコーダE1により検出された回転角とに基づいて、電流指令を生成するとともに、電流指令をサーボモータM1に出力する。これにより、ジョイスティック82に入力された動作指令に沿うように、ロボットアーム60が移動される。
また、制御装置130は、アーム操作部80のリニアスイッチ83からの入力信号に基づいてロボットアーム60を制御する。具体的には、アーム制御部31aは、リニアスイッチ83から入力された入力信号を制御装置130に出力する。制御装置130は受け取った入力信号と、エンコーダE1またはE3により検出された回転角とに基づいて位置指令を生成するとともに、アーム制御部31aを介して、位置指令をサーボ制御部C1またはC3に出力する。サーボ制御部C1またはC3は、アーム制御部31aから入力された位置指令と、エンコーダE1またはE3により検出された回転角とに基づいて、電流指令を生成するとともに、電流指令をサーボモータM1またはM3に出力する。これにより、リニアスイッチ83に入力された動作指令に沿うように、ロボットアーム60が移動される。
ここで、本実施形態では、図14に示すように、ロボットアーム60には、アーム操作部80により受け付けられた信号が入力される基板140が配置されている。アーム制御部31aと基板140との間は、第1配線141によりシリアル通信接続されている。基板140には、コネクタ140aやIC140bなどが配置されている。第1配線141は、1系統の伝送路からなる。アーム制御部31aと基板140との間は、アーム制御部31aと基板140との間において互いの情報を共有可能な通信ネットワークによりシリアル通信接続されている。第1配線141は、配線の一例である。
本実施形態では、図14に示すように、基板140は、第2リンク部73に配置されている。第2リンク部73には、アーム操作部80が接続されている。アーム操作部80から延びる複数のハーネス142が、基板140のコネクタ140aに接続されている。基板140から並進移動機構部70の内部に、フレキシブルプリント配線からなる第1配線141が延びている。
本実施形態では、図13に示すように、アーム制御部31aと基板140との間は、サーボモータM1、M2、およびM3の移動量を各々検知するエンコーダE1、E2およびE3とアーム制御部31aとの間の通信経路とは別個に、第1配線141によりシリアル通信接続されている。具体的には、エンコーダE1、E2およびE3と、アーム制御部31aとは、第2配線143によりシリアル通信接続されている。また、エンコーダE1、E2およびE3は、バス接続されている。また、エンコーダE1、E2およびE3は、各々、サーボ制御部C1、C2およびC3を介してアーム制御部31aに接続されている。
本実施形態では、図2に示すように、アーム制御部31aと基板140との間は、ロボットアーム60の内部およびポジショナ40の外部を介して、第1配線141によりシリアル通信接続されている。具体的は、基板140とアーム制御部31aとは、ロボットアーム60の内部、アームベース50の内部、および、ポジショナ40の外部に配置される管部材44の内部を介して、第1配線141により接続されている。管部材44は、電源線などが配置される管である。
本実施形態では、図2に示すように、アーム制御部31aと基板140とは、中継部144を介して、シリアル通信接続されている。中継部144は、中継部144aと中継部144bとを含む。中継部144aは、第1リンク部72に配置されており、基板140と中継部144aとの間は、フレキシブルプリント配線からなる第1配線141により接続されている。中継部144bは、ロボットアーム60とアームベース50との間に配置されており、中継部144a、中継部144bおよびアーム制御部31aの間は、アーム部61と、アームベース50と、管部材44との内部を介して、ケーブル配線からなる第1配線141により接続されている。具体的には、中継部144aおよび中継部144bはコネクタである。基板140から延びるフレキシブルプリント配線と中継部144bから延びるケーブル配線とは、中継部144aで接続されている。また、中継部144aから延びるケーブル配線とアーム制御部31aから延びるケーブル配線とは、中継部144bで接続されている。なお、中継部144aと中継部144bとは、ICなどを搭載した中継基板であっても良い。また、中継部144a、中継部144bおよびアーム制御部31aの間は、フレキシブルプリント配線により接続されても良い。また、中継部144は、医療用台車3の内部に配置されていてもよい。ここで、フレキシブルプリント配線は、FPC(Flexible Printed Circuit)のことである。また、ケーブル配線は、フレキシブルプリント配線以外の配線構造であり、例えば、ポリ塩化ビニル系樹脂、ポリエチレン系樹脂、ETFE(Ethylene Tetra Fluoro Ethylene)樹脂などの外皮で覆われたケーブルのことである。ケーブル配線は、ロボットケーブルと呼ばれることもある。なお、フレキシブルプリント配線として、FFC(Flexible Flat Cable)を用いても良い。
本実施形態では、図13に示すように、基板140には、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86と、により受け付けられた信号のうちの少なくとも1つが入力される。具体的には、基板140には、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86と、により受け付けられた信号の全てが入力される。ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86とは、各々、ハーネス142によって基板140のコネクタ140aに接続されている。ジョイスティック82からは、アナログ信号が送信される。リニアスイッチ83、ピボットボタン85、および、アジャストメントボタン86からは、デジタル信号が送信される。
本実施形態では、基板140には、モード切替ボタン84により受け付けられた信号が入力される。基板140からは、モードインジケータ84aに信号が出力される。モード切替ボタン84からは、デジタル信号が送信される。
本実施形態では、基板140には、手術器具4に配置された記憶部4kからの手術器具4の情報と、ロボットアーム60に手術器具4が取り付けられているか否かの情報と、ロボットアーム60に手術器具4を取り付けるためのアダプタ220が取り付けられているか否かの情報と、のうちの少なくとも1つが入力される。具体的には、基板140には、記憶部4kからの手術器具4の情報、手術器具4が取り付けられているか否かの情報、および、アダプタ220が取り付けられているか否かの情報の全てが入力される。図9に示すように、ロボットアーム60に手術器具4が取り付けられているか否かは、第2リンク部73に配置されるセンサ73aによって検知される。ロボットアーム60にアダプタ220が取り付けられているか否かは、第2リンク部73に配置されるセンサ73bによって検知される。
基板140には、アダプタ220の駆動伝達部222の嵌合凹部222aと、手術器具4の被駆動部材4iの嵌合凸部4jとが嵌合しているか否かの情報が入力される。嵌合凹部222aと嵌合凸部4jとが嵌合しているか否かは、第2リンク部73に配置されるセンサ73cによって検知される。
図11に示すように、ポジショナ制御部31bは、ポジショナ40および医療用台車3を制御する。ポジショナ40には、ポジショナ40の複数の関節部43に対応するように、サーボモータSMと、エンコーダENと、減速機が配置されている。ポジショナ40のサーボモータSMを制御するサーボ制御部SCは、医療用台車3に配置されている。医療用台車3には、医療用台車3の複数の前輪の各々を駆動するサーボモータSMと、エンコーダENと、減速機と、サーボ制御部SCと、ブレーキとが配置されている。
図11に示すように、操作制御部110は、遠隔操作装置2の本体に配置されている。操作制御部110は、操作部120を制御する。操作制御部110は、操作部120Lと操作部120Rとの各々に配置されている。操作部120には、操作部120の複数の関節部に対応するように、サーボモータSMと、エンコーダENと、減速機とが配置されている。操作部120のサーボモータSMを制御するサーボ制御部SCは、操作制御部110に隣接して遠隔操作装置2の本体に配置されている。
[本実施形態の効果]
アーム操作部80により受け付けられた信号が入力される基板140と、アーム制御部31aとの間は、第1配線141によりシリアル通信接続されている。これにより、アーム操作部80にジョイスティック82や操作ボタンなどが配置されても、ジョイスティック82や操作ボタンなどから延びるハーネス142は基板140に接続される一方、基板140とアーム制御部31aとの間は、シリアル通信接続されている。その結果、ジョイスティック82や操作ボタンなどを各々アーム制御部31aに接続する場合に比べて配線の数を削減できる。
アーム操作部80により受け付けられた信号が入力される基板140と、アーム制御部31aとの間は、第1配線141によりシリアル通信接続されている。これにより、アーム操作部80にジョイスティック82や操作ボタンなどが配置されても、ジョイスティック82や操作ボタンなどから延びるハーネス142は基板140に接続される一方、基板140とアーム制御部31aとの間は、シリアル通信接続されている。その結果、ジョイスティック82や操作ボタンなどを各々アーム制御部31aに接続する場合に比べて配線の数を削減できる。
アーム制御部31aと基板140との間は、サーボモータM1、M2およびM3の各々移動量を検知するエンコーダE1、E2およびE3とアーム制御部31aとの間の通信経路とは別個に、第1配線141によりシリアル通信接続されている。これにより、アーム操作部80とアーム制御部31aとの間の信号と、エンコーダE1、E2およびE3とアーム制御部31aとの間の信号とが干渉することを抑制できる。
エンコーダE1、E2およびE3とアーム制御部31aとは、第2配線143によりシリアル通信接続されている。これにより、複数のエンコーダE1、E2およびE3が配置されている場合でも、アーム操作部80からの信号と、各エンコーダからの信号とが干渉することを抑制しながらアーム制御部31aまで延びる配線の数を削減できる。
アーム制御部31aと基板140との間は、ロボットアーム60の内部を介して、シリアル通信接続されている。これにより、基板140とアーム制御部31aとの間は第1配線141によって接続されて配線の数が削減されているので、ロボットアーム60が大きくなることを抑制できる。
アーム制御部31aは、医療用台車3の内部に配置されており、アーム制御部31aと基板140との間は、ロボットアーム60の内部およびポジショナ40の外部を介して、第1配線141によりシリアル通信接続されている。これにより、ロボットアーム60の内部およびポジショナ40の外部を介する配線の数を削減できる。
制御装置130は、医療用台車3の内部においてアーム制御部31aと通信するように配置されている。これにより、制御装置130が医療用台車3の外部に配置される場合と異なり、手術支援システム100の構成が複雑になることを抑制できる。
アーム制御部31aと基板140とは、中継部144を介して、シリアル通信接続されている。これにより、互いに分離される部分に中継部144を配置することにより、分離される部分と配線とを一体的に分離することができる。その結果、手術支援システム100を容易に配線の繋ぎ変えなどの作業負担を軽減することができる。また、中継部144を介してシリアル通信接続する配線の種類を変更することができる。例えば、中継部144を介してケーブル配線とフレキシブルプリント配線とを接続することにより、可動部においてフレキシブルプリント配線を配置するようにすることができる。
基板140と中継部144aとの間は、フレキシブルプリント配線からなる第1配線141により接続されている。これにより、第2リンク部73と並進移動機構部70との間には、フレキシブルプリント配線からなる第1配線141が配置されるので、第1配線141が、Z方向に沿って相対的に直線移動する第2リンク部73と並進移動機構部70の移動の妨げになるのを抑制することができる。
基板140には、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86と、により受け付けられた信号のうちの少なくとも1つが入力される。これにより、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86とのうちの少なくとも1つがアーム操作部80に配置される場合において、アーム制御部31aまで延びる配線の数を削減できる。また、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86とのうちの複数がアーム操作部80に配置される場合、アーム操作部80から延びる配線の数が多くなるので、アーム制御部31aと基板140との間をシリアル通信接続することによりアーム制御部31aまで延びる配線の数を削減することは、特に有効である。
基板140には、モード切替ボタン84により受け付けられた信号が入力され、基板140からモードインジケータ84aに信号が出力される。これにより、アーム操作部80にモードインジケータ84aが配置され、基板140からモードインジケータ84aに信号が出力される場合において、アーム制御部31aまで延びる配線の数を削減できる。
基板140には、記憶部4kからの手術器具4の情報と、ロボットアーム60に手術器具4が取り付けられているか否かの情報と、ロボットアーム60に手術器具4を取り付けるためのアダプタ220が取り付けられているか否かの情報と、のうちの少なくとも1つが入力される。これにより、基板140に、手術器具4の情報と、手術器具4が取り付けられているか否かの情報と、アダプタ220が取り付けられているか否かの情報とのうちの少なくとも1つが入力される場合において、アーム制御部31aまで延びる配線の数を削減できる。
基板140は、第2リンク部73に配置されている。これにより、アーム操作部80と基板140との間の距離が比較的小さくなるので、アーム操作部80から基板140に入力される信号に対するノイズの影響を低減できる。
[変形例]
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本開示の範囲は、上記した実施形態の説明ではなく請求の範囲によって示され、さらに請求の範囲と均等の意味および範囲内でのすべての変更または変形例が含まれる。
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本開示の範囲は、上記した実施形態の説明ではなく請求の範囲によって示され、さらに請求の範囲と均等の意味および範囲内でのすべての変更または変形例が含まれる。
上記実施形態では、アーム制御部31aが医療用台車3に配置されている例を示したが、本開示はこれに限られない。たとえば、アーム制御部31aが、ロボットアーム60など、医療用台車3以外の部分に配置されていてもよい。
上記実施形態では、アーム操作部80が第2リンク部73に取り付けられている例を示したが、本開示はこれに限られない。たとえば、アーム操作部80が第2リンク部73以外のロボットアーム60の部分に取り付けられていてもよい。
上記実施形態では、基板140が第2リンク部73に配置されている例を示したが、本開示はこれに限られない。たとえば、基板140がアーム操作部80に配置されていてもよい。
上記実施形態では、エンコーダE1、E2およびE3と、アーム制御部31aとは、第2配線143によりシリアル通信接続されている例を示したが、本開示はこれに限られない。たとえば、エンコーダE1、E2およびE3と、アーム制御部31aとの間の通信方法が、シリアル通信以外の通信方法でもよい。
上記実施形態では、制御装置130が医療用台車3に配置されている例を示したが、本開示はこれに限られない。たとえば、制御装置130が、医療用台車3の外部に配置されていてもよい。
上記実施形態では、アーム制御部31aと基板140とが、中継部144を介して、シリアル通信接続されている例を示したが、本開示はこれに限られない。たとえば、アーム制御部31aと基板140とが、中継部144を介さずに直接接続されていてもよい。
上記実施形態では、基板140に、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86と、により受け付けられた信号の全てが入力される例を示したが、本開示はこれに限られない。たとえば、基板140に、ジョイスティック82と、リニアスイッチ83と、ピボットボタン85と、アジャストメントボタン86とのうちのいずれか1つ、または、全てではない複数の信号が入力されていてもよい。
また、上記実施形態では、ロボットアーム60が4つ設けられている例を示したが、本開示はこれに限られない。本開示では、ロボットアーム60の数は、少なくとも1つ以上設けられていれば他の任意の数であってもよい。
また、上記実施形態では、アーム部61およびポジショナ40が7軸多関節ロボットから構成されている例を示したが、本開示はこれに限られない。たとえば、アーム部61およびポジショナ40が7軸多関節ロボット以外の軸構成の多関節ロボットなどから構成されていてもよい。7軸多関節ロボット以外の軸構成とは、例えば、6軸や8軸である。
また、上記実施形態では、手術支援ロボット1が、医療用台車3と、ポジショナ40と、アームベース50とを備えている例を示したが、本開示はこれに限らない。たとえば、医療用台車3と、ポジショナ40と、アームベース50は必ずしも必要なく、手術支援ロボット1が、ロボットアーム60だけで構成されてもよい。
[態様]
上記した例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
上記した例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
(項目1)
手術器具が取り付けられるロボットアームと、
前記ロボットアームに取り付けられ、前記ロボットアームを操作するアーム操作部と、
前記ロボットアームまたは前記アーム操作部に配置され、前記アーム操作部により受け付けられた信号が入力される基板と、
制御部とを備え、
前記制御部と前記基板との間は、第1配線によりシリアル通信接続されている、手術支援システム。
手術器具が取り付けられるロボットアームと、
前記ロボットアームに取り付けられ、前記ロボットアームを操作するアーム操作部と、
前記ロボットアームまたは前記アーム操作部に配置され、前記アーム操作部により受け付けられた信号が入力される基板と、
制御部とを備え、
前記制御部と前記基板との間は、第1配線によりシリアル通信接続されている、手術支援システム。
(項目2)
前記ロボットアームは、関節部と、前記関節部に設けられる駆動部とを含み、
前記制御部と前記基板との間は、前記駆動部の移動量を検知する検知部と前記制御部との間の通信経路とは別個に、前記第1配線によりシリアル通信接続されている、項目1に記載の手術支援システム。
前記ロボットアームは、関節部と、前記関節部に設けられる駆動部とを含み、
前記制御部と前記基板との間は、前記駆動部の移動量を検知する検知部と前記制御部との間の通信経路とは別個に、前記第1配線によりシリアル通信接続されている、項目1に記載の手術支援システム。
(項目3)
前記検知部と前記制御部とは、第2配線によりシリアル通信接続されている、項目2に記載の手術支援システム。
前記検知部と前記制御部とは、第2配線によりシリアル通信接続されている、項目2に記載の手術支援システム。
(項目4)
前記制御部と前記基板との間は、前記ロボットアームの内部を介して、シリアル通信接続されている、項目1から項目3までのいずれか1項に記載の手術支援システム。
前記制御部と前記基板との間は、前記ロボットアームの内部を介して、シリアル通信接続されている、項目1から項目3までのいずれか1項に記載の手術支援システム。
(項目5)
前記ロボットアームが取り付けられるアームベースと、
前記アームベースの位置を調整するポジショナと、
前記ポジショナを移動させる医療用台車と、をさらに備え、
前記制御部は、前記医療用台車の内部に配置されており、
前記制御部と前記基板との間は、前記ロボットアームの内部および前記ポジショナの外部を介して、前記第1配線によりシリアル通信接続されている、項目4に記載の手術支援システム。
前記ロボットアームが取り付けられるアームベースと、
前記アームベースの位置を調整するポジショナと、
前記ポジショナを移動させる医療用台車と、をさらに備え、
前記制御部は、前記医療用台車の内部に配置されており、
前記制御部と前記基板との間は、前記ロボットアームの内部および前記ポジショナの外部を介して、前記第1配線によりシリアル通信接続されている、項目4に記載の手術支援システム。
(項目6)
前記医療用台車の内部において前記制御部と通信するように配置され、前記手術支援システムの全体を制御する制御装置をさらに備える、項目5に記載の手術支援システム。
前記医療用台車の内部において前記制御部と通信するように配置され、前記手術支援システムの全体を制御する制御装置をさらに備える、項目5に記載の手術支援システム。
(項目7)
前記制御部と前記基板とは、中継部を介して、シリアル通信接続されている、項目1から項目6までのいずれか1項に記載の手術支援システム。
前記制御部と前記基板とは、中継部を介して、シリアル通信接続されている、項目1から項目6までのいずれか1項に記載の手術支援システム。
(項目8)
前記制御部と前記中継部との間と、前記中継部と前記基板との間との少なくとも一方は、フレキシブルプリント配線からなる前記第1配線によりシリアル通信接続されている、項目7に記載の手術支援システム。
前記制御部と前記中継部との間と、前記中継部と前記基板との間との少なくとも一方は、フレキシブルプリント配線からなる前記第1配線によりシリアル通信接続されている、項目7に記載の手術支援システム。
(項目9)
前記ロボットアームは、
アーム部と、
前記アーム部の先端に配置される第1リンク部と、
前記アーム操作部が取り付けられる第2リンク部と、
前記第1リンク部に対して前記第2リンク部を並進移動させる並進移動機構部と、を含み、
前記中継部は、
前記第1リンク部に配置されている第1中継部を含み、
前記基板と前記第1中継部との間は、前記フレキシブルプリント配線からなる前記第1配線によりシリアル通信接続されている、項目8に記載の手術支援システム。
前記ロボットアームは、
アーム部と、
前記アーム部の先端に配置される第1リンク部と、
前記アーム操作部が取り付けられる第2リンク部と、
前記第1リンク部に対して前記第2リンク部を並進移動させる並進移動機構部と、を含み、
前記中継部は、
前記第1リンク部に配置されている第1中継部を含み、
前記基板と前記第1中継部との間は、前記フレキシブルプリント配線からなる前記第1配線によりシリアル通信接続されている、項目8に記載の手術支援システム。
(項目10)
前記ロボットアームが取り付けられるアームベースをさらに備え、
前記中継部は、
前記ロボットアームと前記アームベースとの間に配置されている第2中継部を含み、
前記第1中継部と前記第2中継部との間および前記第2中継部と前記制御部との間は、ケーブル配線からなる前記第1配線によりシリアル通信接続されている、項目9に記載の手術支援システム。
前記ロボットアームが取り付けられるアームベースをさらに備え、
前記中継部は、
前記ロボットアームと前記アームベースとの間に配置されている第2中継部を含み、
前記第1中継部と前記第2中継部との間および前記第2中継部と前記制御部との間は、ケーブル配線からなる前記第1配線によりシリアル通信接続されている、項目9に記載の手術支援システム。
(項目11)
前記アーム操作部は、
前記ロボットアームによる前記手術器具の移動を操作するためのジョイスティックと、
前記手術器具の長手方向に沿った方向に前記ロボットアームによる前記手術器具の移動を操作するためのリニアスイッチと、
前記ロボットアームに取り付けられた前記手術器具の移動の支点となるピボット位置を設定するためのピボットボタンと、
前記ロボットアームの位置を最適化するためのアジャストメントボタンと、のうちの少なくとも1つを含み、
前記基板には、前記ジョイスティックと、前記リニアスイッチと、前記ピボットボタンと、前記アジャストメントボタンと、により受け付けられた信号のうちの少なくとも1つが入力される、項目1から項目10までのいずれか1項に記載の手術支援システム。
前記アーム操作部は、
前記ロボットアームによる前記手術器具の移動を操作するためのジョイスティックと、
前記手術器具の長手方向に沿った方向に前記ロボットアームによる前記手術器具の移動を操作するためのリニアスイッチと、
前記ロボットアームに取り付けられた前記手術器具の移動の支点となるピボット位置を設定するためのピボットボタンと、
前記ロボットアームの位置を最適化するためのアジャストメントボタンと、のうちの少なくとも1つを含み、
前記基板には、前記ジョイスティックと、前記リニアスイッチと、前記ピボットボタンと、前記アジャストメントボタンと、により受け付けられた信号のうちの少なくとも1つが入力される、項目1から項目10までのいずれか1項に記載の手術支援システム。
(項目12)
前記アーム操作部は、
前記手術器具を並進移動させるモードと回転移動させるモードとを切り替えるモード切替ボタンと、
切り替えられたモードを表示するモードインジケータと、を含み、
前記基板には、前記モード切替ボタンにより受け付けられた信号が入力され、
前記基板から前記モードインジケータに信号が出力される、項目1から項目11までのいずれか1項に記載の手術支援システム。
前記アーム操作部は、
前記手術器具を並進移動させるモードと回転移動させるモードとを切り替えるモード切替ボタンと、
切り替えられたモードを表示するモードインジケータと、を含み、
前記基板には、前記モード切替ボタンにより受け付けられた信号が入力され、
前記基板から前記モードインジケータに信号が出力される、項目1から項目11までのいずれか1項に記載の手術支援システム。
(項目13)
前記手術器具は、前記手術器具の情報を記憶する記憶部を含み、
前記手術器具は、前記ロボットアームにアダプタを介して取り付けられており、
前記基板には、
前記記憶部からの前記手術器具の情報と、
前記ロボットアームに前記手術器具が取り付けられているか否かの情報と、
前記ロボットアームに前記手術器具を取り付けるための前記アダプタが取り付けられているか否かの情報と、のうちの少なくとも1つが入力される、項目1から項目12までのいずれか1項に記載の手術支援システム。
前記手術器具は、前記手術器具の情報を記憶する記憶部を含み、
前記手術器具は、前記ロボットアームにアダプタを介して取り付けられており、
前記基板には、
前記記憶部からの前記手術器具の情報と、
前記ロボットアームに前記手術器具が取り付けられているか否かの情報と、
前記ロボットアームに前記手術器具を取り付けるための前記アダプタが取り付けられているか否かの情報と、のうちの少なくとも1つが入力される、項目1から項目12までのいずれか1項に記載の手術支援システム。
(項目14)
前記ロボットアームは、
アーム部と、
前記アーム部の先端に配置される第1リンク部と、
前記アーム操作部が取り付けられる第2リンク部と、
前記第1リンク部に対して前記第2リンク部を並進移動させる並進移動機構部と、を含み、
前記基板は、前記第2リンク部に配置されている、項目1から項目13までのいずれか1項に記載の手術支援システム。
前記ロボットアームは、
アーム部と、
前記アーム部の先端に配置される第1リンク部と、
前記アーム操作部が取り付けられる第2リンク部と、
前記第1リンク部に対して前記第2リンク部を並進移動させる並進移動機構部と、を含み、
前記基板は、前記第2リンク部に配置されている、項目1から項目13までのいずれか1項に記載の手術支援システム。
(項目15)
手術器具が取り付けられるロボットアームと、
前記ロボットアームに取り付けられ、前記ロボットアームを操作するアーム操作部と、
前記ロボットアームまたは前記アーム操作部に配置され、前記アーム操作部により受け付けられた信号が入力される基板と、
制御部とを備え、
前記制御部と前記基板との間は、配線によりシリアル通信接続されている、手術支援ロボット。
手術器具が取り付けられるロボットアームと、
前記ロボットアームに取り付けられ、前記ロボットアームを操作するアーム操作部と、
前記ロボットアームまたは前記アーム操作部に配置され、前記アーム操作部により受け付けられた信号が入力される基板と、
制御部とを備え、
前記制御部と前記基板との間は、配線によりシリアル通信接続されている、手術支援ロボット。
Claims (15)
- 手術器具が取り付けられるロボットアームと、
前記ロボットアームに取り付けられ、前記ロボットアームを操作するアーム操作部と、
前記ロボットアームまたは前記アーム操作部に配置され、前記アーム操作部により受け付けられた信号が入力される基板と、
制御部とを備え、
前記制御部と前記基板との間は、第1配線によりシリアル通信接続されている、手術支援システム。 - 前記ロボットアームは、関節部と、前記関節部に設けられる駆動部とを含み、
前記制御部と前記基板との間は、前記駆動部の移動量を検知する検知部と前記制御部との間の通信経路とは別個に、前記第1配線によりシリアル通信接続されている、請求項1に記載の手術支援システム。 - 前記検知部と前記制御部とは、第2配線によりシリアル通信接続されている、請求項2に記載の手術支援システム。
- 前記制御部と前記基板との間は、前記ロボットアームの内部を介して、シリアル通信接続されている、請求項1に記載の手術支援システム。
- 前記ロボットアームが取り付けられるアームベースと、
前記アームベースの位置を調整するポジショナと、
前記ポジショナを移動させる医療用台車と、をさらに備え、
前記制御部は、前記医療用台車の内部に配置されており、
前記制御部と前記基板との間は、前記ロボットアームの内部および前記ポジショナの外部を介して、前記第1配線によりシリアル通信接続されている、請求項4に記載の手術支援システム。 - 前記医療用台車の内部において前記制御部と通信するように配置され、前記手術支援システムの全体を制御する制御装置をさらに備える、請求項5に記載の手術支援システム。
- 前記制御部と前記基板とは、中継部を介して、シリアル通信接続されている、請求項1に記載の手術支援システム。
- 前記制御部と前記中継部との間と、前記中継部と前記基板との間との少なくとも一方は、フレキシブルプリント配線からなる前記第1配線によりシリアル通信接続されている、請求項7に記載の手術支援システム。
- 前記ロボットアームは、
アーム部と、
前記アーム部の先端に配置される第1リンク部と、
前記アーム操作部が取り付けられる第2リンク部と、
前記第1リンク部に対して前記第2リンク部を並進移動させる並進移動機構部と、を含み、
前記中継部は、
前記第1リンク部に配置されている第1中継部を含み、
前記基板と前記第1中継部との間は、前記フレキシブルプリント配線からなる前記第1配線によりシリアル通信接続されている、請求項8に記載の手術支援システム。 - 前記ロボットアームが取り付けられるアームベースをさらに備え、
前記中継部は、
前記ロボットアームと前記アームベースとの間に配置されている第2中継部を含み、
前記第1中継部と前記第2中継部との間および前記第2中継部と前記制御部との間は、ケーブル配線からなる前記第1配線によりシリアル通信接続されている、請求項9に記載の手術支援システム。 - 前記アーム操作部は、
前記ロボットアームによる前記手術器具の移動を操作するためのジョイスティックと、
前記手術器具の長手方向に沿った方向に前記ロボットアームによる前記手術器具の移動を操作するためのリニアスイッチと、
前記ロボットアームに取り付けられた前記手術器具の移動の支点となるピボット位置を設定するためのピボットボタンと、
前記ロボットアームの位置を最適化するためのアジャストメントボタンと、のうちの少なくとも1つを含み、
前記基板には、前記ジョイスティックと、前記リニアスイッチと、前記ピボットボタンと、前記アジャストメントボタンと、により受け付けられた信号のうちの少なくとも1つが入力される、請求項1に記載の手術支援システム。 - 前記アーム操作部は、
前記手術器具を並進移動させるモードと回転移動させるモードとを切り替えるモード切替ボタンと、
切り替えられたモードを表示するモードインジケータと、を含み、
前記基板には、前記モード切替ボタンにより受け付けられた信号が入力され、
前記基板から前記モードインジケータに信号が出力される、請求項1に記載の手術支援システム。 - 前記手術器具は、前記手術器具の情報を記憶する記憶部を含み、
前記手術器具は、前記ロボットアームにアダプタを介して取り付けられており、
前記基板には、
前記記憶部からの前記手術器具の情報と、
前記ロボットアームに前記手術器具が取り付けられているか否かの情報と、
前記ロボットアームに前記手術器具を取り付けるための前記アダプタが取り付けられているか否かの情報と、のうちの少なくとも1つが入力される、請求項1に記載の手術支援システム。 - 前記ロボットアームは、
アーム部と、
前記アーム部の先端に配置される第1リンク部と、
前記アーム操作部が取り付けられる第2リンク部と、
前記第1リンク部に対して前記第2リンク部を並進移動させる並進移動機構部と、を含み、
前記基板は、前記第2リンク部に配置されている、請求項1に記載の手術支援システム。 - 手術器具が取り付けられるロボットアームと、
前記ロボットアームに取り付けられ、前記ロボットアームを操作するアーム操作部と、
前記ロボットアームまたは前記アーム操作部に配置され、前記アーム操作部により受け付けられた信号が入力される基板と、
制御部とを備え、
前記制御部と前記基板との間は、配線によりシリアル通信接続されている、手術支援ロボット。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-208662 | 2021-12-22 | ||
| JP2021208662 | 2021-12-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023120526A1 true WO2023120526A1 (ja) | 2023-06-29 |
Family
ID=86902525
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/046911 WO2023120526A1 (ja) | 2021-12-22 | 2022-12-20 | 手術支援システムおよび手術支援ロボット |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2023120526A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012192497A (ja) * | 2011-03-17 | 2012-10-11 | Denso Wave Inc | 多関節ロボット |
| JP2016064472A (ja) * | 2014-09-25 | 2016-04-28 | 上銀科技股▲分▼有限公司 | 関節式ロボットアームの手首構造 |
| JP2020103889A (ja) * | 2018-12-26 | 2020-07-09 | 川崎重工業株式会社 | 外科手術システムに使用されるマニピュレータアームおよび患者側システム |
| JP2021065405A (ja) * | 2019-10-23 | 2021-04-30 | 株式会社メディカロイド | 手術器具 |
| JP2021175500A (ja) * | 2020-04-28 | 2021-11-04 | 川崎重工業株式会社 | 手術支援ロボット |
-
2022
- 2022-12-20 WO PCT/JP2022/046911 patent/WO2023120526A1/ja unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012192497A (ja) * | 2011-03-17 | 2012-10-11 | Denso Wave Inc | 多関節ロボット |
| JP2016064472A (ja) * | 2014-09-25 | 2016-04-28 | 上銀科技股▲分▼有限公司 | 関節式ロボットアームの手首構造 |
| JP2020103889A (ja) * | 2018-12-26 | 2020-07-09 | 川崎重工業株式会社 | 外科手術システムに使用されるマニピュレータアームおよび患者側システム |
| JP2021065405A (ja) * | 2019-10-23 | 2021-04-30 | 株式会社メディカロイド | 手術器具 |
| JP2021175500A (ja) * | 2020-04-28 | 2021-11-04 | 川崎重工業株式会社 | 手術支援ロボット |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2987461B1 (en) | Multi-component telepresence system | |
| US8888764B2 (en) | Wireless communication in a robotic surgical system | |
| US11490972B2 (en) | Driver interface, robotic surgical system, and method of detecting attachment of drape to driver interface | |
| US20210330409A1 (en) | Surgical Robot and Method for Setting Pivot Position | |
| WO2023120526A1 (ja) | 手術支援システムおよび手術支援ロボット | |
| JP7105272B2 (ja) | 手術支援ロボットおよび手術支援ロボットシステム | |
| US20210330406A1 (en) | Surgical Robot | |
| WO2023120401A1 (ja) | 手術支援システムおよび操作者側装置 | |
| WO2022168510A1 (ja) | 手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法 | |
| WO2023090352A1 (ja) | 手術支援システムおよび手術支援システムの制御方法 | |
| WO2024101043A1 (ja) | 手術器具アダプタおよび手術支援ロボット | |
| JP7393383B2 (ja) | 手術支援ロボットおよび多関節ロボットの作動方法 | |
| WO2023120396A1 (ja) | 手術支援システム、手術支援ロボットおよび手術支援システムの制御方法 | |
| US20210322111A1 (en) | Interface and surgery assist robot | |
| US20240041548A1 (en) | Surgical robot and robotic surgical system | |
| JP2023061245A (ja) | 手術支援ロボット | |
| WO2023219143A1 (ja) | 手術支援システムおよび手術支援システムの制御方法 | |
| JP2024022287A (ja) | 手術支援ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22911228 Country of ref document: EP Kind code of ref document: A1 |