WO2023120526A1 - 手術支援システムおよび手術支援ロボット - Google Patents
手術支援システムおよび手術支援ロボット Download PDFInfo
- Publication number
- WO2023120526A1 WO2023120526A1 PCT/JP2022/046911 JP2022046911W WO2023120526A1 WO 2023120526 A1 WO2023120526 A1 WO 2023120526A1 JP 2022046911 W JP2022046911 W JP 2022046911W WO 2023120526 A1 WO2023120526 A1 WO 2023120526A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- arm
- surgical instrument
- robot arm
- robot
- support system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/98—Identification means for patients or instruments, e.g. tags using electromagnetic means, e.g. transponders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2059—Mechanical position encoders
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
- A61B2034/256—User interfaces for surgical systems having a database of accessory information, e.g. including context sensitive help or scientific articles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/742—Joysticks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/743—Keyboards
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/744—Mouse
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/32—Surgical robots operating autonomously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/13—Trolleys, e.g. carts
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45117—Medical, radio surgery manipulator
Definitions
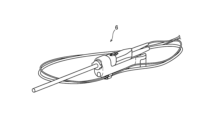
- FIG. 10 is a perspective view of an adapter and a surgical instrument according to one embodiment as seen from the Y2 direction side; It is a control block diagram of a surgical assistance robot according to one embodiment.
- FIG. 4 is a control block diagram of a robotic arm according to one embodiment;
- FIG. 4 illustrates a serial connection between a controller and a substrate according to one embodiment;
- FIG. 5 is a cross-sectional view taken along line 300-300 of FIG. 4;
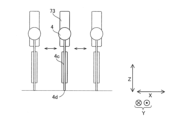
- the surgical assistance robot 1 includes a medical cart 3 , a positioner 40 , an arm base 50 , a plurality of robot arms 60 and an arm manipulator 80 .
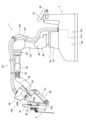
- an adapter 220 is attached to the connecting portion 4g arranged on the Y2 direction side of the surgical instrument 4.
- the connecting portion 4g is arranged in the housing 4h and attached to the robot arm 60 via the adapter 220.
- the servo motor M2 of the robot arm 60 is attached to the connecting portion 220b arranged on the Y2 direction side of the adapter 220.
- the surgical instrument 4 is attached to the connecting portion 220a arranged on the Y1 direction side of the adapter 220.
- An adapter 220 is attached to the connecting portion 76 arranged on the Y1 direction side of the servo motor M2.
- the robot arm 60 is covered by a drape 210 for use in clean areas.
- cleaning operations are performed in order to prevent the surgically incised portion and the medical equipment from being contaminated with pathogenic bacteria, foreign substances, and the like.
- a clean area and a contaminated area which is an area other than the clean area, are set.
- the surgical site is placed in a clean area.
- Surgical team members, including the operator, should ensure that only sterile objects are in the clean area during surgery, and should remove objects from contaminated areas when moving them into the clean area. should be sterilized.
- the substrate 140 is arranged on the second link portion 73 .
- the distance between the arm operating section 80 and the board 140 is relatively small, so that the influence of noise on the signal input from the arm operating section 80 to the board 140 can be reduced.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Electromagnetism (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/721,218 US20250057615A1 (en) | 2021-12-22 | 2022-12-20 | Robotic surgical system and surgical robot |
| JP2023569462A JP7848238B2 (ja) | 2021-12-22 | 2022-12-20 | 手術支援システムおよび手術支援ロボット |
| EP22911228.9A EP4454593A4 (en) | 2021-12-22 | 2022-12-20 | Surgery assisting system and surgery assisting robot |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-208662 | 2021-12-22 | ||
| JP2021208662 | 2021-12-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023120526A1 true WO2023120526A1 (ja) | 2023-06-29 |
Family
ID=86902525
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/046911 Ceased WO2023120526A1 (ja) | 2021-12-22 | 2022-12-20 | 手術支援システムおよび手術支援ロボット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250057615A1 (https=) |
| EP (1) | EP4454593A4 (https=) |
| JP (1) | JP7848238B2 (https=) |
| WO (1) | WO2023120526A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024036816A (ja) * | 2022-09-06 | 2024-03-18 | 川崎重工業株式会社 | 手術支援システムおよび操作装置の制御方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012192497A (ja) * | 2011-03-17 | 2012-10-11 | Denso Wave Inc | 多関節ロボット |
| JP2016064472A (ja) * | 2014-09-25 | 2016-04-28 | 上銀科技股▲分▼有限公司 | 関節式ロボットアームの手首構造 |
| JP2019162427A (ja) | 2011-06-02 | 2019-09-26 | メドロボティクス コーポレイション | ロボットシステム、ロボットシステムのユーザインタフェース、ロボットシステムを制御するためのヒューマンインタフェース装置、およびロボットシステムを制御する方法 |
| JP2020103889A (ja) * | 2018-12-26 | 2020-07-09 | 川崎重工業株式会社 | 外科手術システムに使用されるマニピュレータアームおよび患者側システム |
| JP2021065405A (ja) * | 2019-10-23 | 2021-04-30 | 株式会社メディカロイド | 手術器具 |
| JP2021175500A (ja) * | 2020-04-28 | 2021-11-04 | 川崎重工業株式会社 | 手術支援ロボット |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3395508A1 (en) | 2005-06-30 | 2018-10-31 | Intuitive Surgical Operations Inc. | Indicator for tool state communication in multi-arm robotic telesurgery |
| US9895813B2 (en) * | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| JP2015085454A (ja) * | 2013-10-31 | 2015-05-07 | セイコーエプソン株式会社 | ロボット |
| US11369443B2 (en) * | 2019-06-27 | 2022-06-28 | Cilag Gmbh International | Method of using a surgical modular robotic assembly |
| JP7171647B2 (ja) | 2020-04-28 | 2022-11-15 | 川崎重工業株式会社 | 手術支援ロボット、ピボット位置設定方法および外科手術システム |
| JP7559073B2 (ja) * | 2020-09-03 | 2024-10-01 | 川崎重工業株式会社 | 基板搬送ロボットシステム |
-
2022
- 2022-12-20 JP JP2023569462A patent/JP7848238B2/ja active Active
- 2022-12-20 WO PCT/JP2022/046911 patent/WO2023120526A1/ja not_active Ceased
- 2022-12-20 EP EP22911228.9A patent/EP4454593A4/en active Pending
- 2022-12-20 US US18/721,218 patent/US20250057615A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012192497A (ja) * | 2011-03-17 | 2012-10-11 | Denso Wave Inc | 多関節ロボット |
| JP2019162427A (ja) | 2011-06-02 | 2019-09-26 | メドロボティクス コーポレイション | ロボットシステム、ロボットシステムのユーザインタフェース、ロボットシステムを制御するためのヒューマンインタフェース装置、およびロボットシステムを制御する方法 |
| JP2016064472A (ja) * | 2014-09-25 | 2016-04-28 | 上銀科技股▲分▼有限公司 | 関節式ロボットアームの手首構造 |
| JP2020103889A (ja) * | 2018-12-26 | 2020-07-09 | 川崎重工業株式会社 | 外科手術システムに使用されるマニピュレータアームおよび患者側システム |
| JP2021065405A (ja) * | 2019-10-23 | 2021-04-30 | 株式会社メディカロイド | 手術器具 |
| JP2021175500A (ja) * | 2020-04-28 | 2021-11-04 | 川崎重工業株式会社 | 手術支援ロボット |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4454593A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023120526A1 (https=) | 2023-06-29 |
| EP4454593A4 (en) | 2025-04-23 |
| US20250057615A1 (en) | 2025-02-20 |
| JP7848238B2 (ja) | 2026-04-20 |
| EP4454593A1 (en) | 2024-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2987461B1 (en) | Multi-component telepresence system | |
| CN101242788B (zh) | 外科手术附件夹具及系统 | |
| US11490972B2 (en) | Driver interface, robotic surgical system, and method of detecting attachment of drape to driver interface | |
| US20260001236A1 (en) | Robotic surgical system and method for controlling robotic surgical system | |
| JP7848238B2 (ja) | 手術支援システムおよび手術支援ロボット | |
| JP7105272B2 (ja) | 手術支援ロボットおよび手術支援ロボットシステム | |
| US20220370158A1 (en) | Surgical robot and operation method for articulated robot | |
| US12053249B2 (en) | Interface and surgery assist robot | |
| WO2023090352A1 (ja) | 手術支援システムおよび手術支援システムの制御方法 | |
| US20250381001A1 (en) | Robotic surgical system | |
| JP7700271B2 (ja) | 手術支援システムおよび操作者側装置 | |
| JP7768724B2 (ja) | 手術支援ロボット | |
| US20250302559A1 (en) | Surgical robot, robotic surgical system, control method for surgical robot, and storage medium | |
| JP2024069899A (ja) | 手術器具アダプタおよび手術支援ロボット | |
| WO2022168510A1 (ja) | 手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法 | |
| WO2023120396A1 (ja) | 手術支援システム、手術支援ロボットおよび手術支援システムの制御方法 | |
| JP2024022305A (ja) | 手術支援ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22911228 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023569462 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18721218 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022911228 Country of ref document: EP Effective date: 20240722 |