WO2023105926A1 - Structure d'articulation mobile et main robot comprenant une structure d'articulation mobile - Google Patents
Structure d'articulation mobile et main robot comprenant une structure d'articulation mobile Download PDFInfo
- Publication number
- WO2023105926A1 WO2023105926A1 PCT/JP2022/038499 JP2022038499W WO2023105926A1 WO 2023105926 A1 WO2023105926 A1 WO 2023105926A1 JP 2022038499 W JP2022038499 W JP 2022038499W WO 2023105926 A1 WO2023105926 A1 WO 2023105926A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- posture
- force
- bending
- joint
- opening
- Prior art date
Links
- 238000005452 bending Methods 0.000 claims abstract description 164
- 238000006243 chemical reaction Methods 0.000 claims abstract description 38
- 210000003811 finger Anatomy 0.000 claims description 134
- 210000000236 metacarpal bone Anatomy 0.000 claims description 39
- 210000003813 thumb Anatomy 0.000 claims description 30
- 238000006073 displacement reaction Methods 0.000 abstract description 10
- 230000036544 posture Effects 0.000 description 332
- 230000033001 locomotion Effects 0.000 description 14
- 210000000988 bone and bone Anatomy 0.000 description 13
- 210000004247 hand Anatomy 0.000 description 10
- 210000004932 little finger Anatomy 0.000 description 10
- 238000003780 insertion Methods 0.000 description 9
- 230000037431 insertion Effects 0.000 description 9
- 230000006835 compression Effects 0.000 description 6
- 238000007906 compression Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 239000012530 fluid Substances 0.000 description 2
- 241000203475 Neopanax arboreus Species 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000001145 finger joint Anatomy 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 210000004935 right thumb Anatomy 0.000 description 1
- 238000007665 sagging Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
Definitions
- the present invention relates to a joint such as a finger of a robot, in particular, a movable structure for a joint capable of rotating about two axes, and a robot hand equipped with a movable structure for the joint.
- robot hands Equipment called manipulators and robot hands with articulated fingers (hereinafter collectively referred to as robot hands) have been developed and used at manufacturing sites.
- robot hands imitating human hands have been proposed for use in artificial hands and, in recent years, as remote communication tools.
- the MP joints can be rotated about two axes, and individual fluid pressure cylinders are connected to each of them to control the fluid pressure of each MP joint. flexion/extension operation and opening/closing operation.
- the present invention has been made in view of the above problems, and an object of the present invention is to provide a movable structure of a robot joint capable of controlling rotation about two axes with a simple configuration, and a robot using the movable structure of the joint. It is to provide a hand.
- a joint movable structure including a first member and a second member is configured such that the second member rotates about a first rotation axis to assume a bent posture. It is displaceable to a position between the extended position and the closed position and the open position by rotating the second member about a second rotating shaft in a direction intersecting the first rotating shaft.
- One of the bending and stretching postures is the initial posture in the bending and stretching direction
- the other is the rotating posture in the bending and stretching direction
- one of the closed posture and the open posture is the initial posture in the opening and closing direction.
- the first elastic body is provided across the first member and the second member to apply a bending and stretching direction force, which is a force toward the bending and stretching direction initial posture side, to the joint.
- a second elastic body provided across the first member and the second member for applying an opening/closing direction force, which is a force toward the opening/closing direction initial posture side, to the joint, and a retraction toward the first member.
- a bending and stretching direction force acting linear member that acts on the joint to apply a force to the bending and stretching direction rotational posture side by applying a force to the joint; and a force conversion member that converts the force into a force for displacing it to the opening/closing direction rotational posture.
- the joint in a state where no external force acts is in the initial posture in the bending and stretching direction and the initial posture in the opening and closing direction.
- a bending-stretching direction force application linear member When force is applied to such a joint by a bending-stretching direction force application linear member, it is possible to displace the joint from the bending-stretching direction initial posture to the bending-stretching direction rotational posture.
- the retracting force of the bending and stretching direction force acting linear member is converted by the force conversion member into a force that displaces the joint to the opening/closing direction rotation posture, the joint is displaced from the opening/closing direction initial posture to the opening/closing direction rotation posture. That is, in this configuration, the retracting force of the bending and stretching direction force acting linear member can be used to displace the posture about the first rotation axis and to displace the posture about the second rotation axis.
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the opening and closing direction rotational posture is the open posture
- the bending and stretching direction force application linear member is an extension linear member that applies a force to the joint in the extension posture side
- a bending linear member is provided that causes the joint to generate a force toward the bending posture side by applying a withdrawal force toward the first member side.
- the initial posture in the bending and stretching direction is the posture in which the bending and stretching directions are rotated
- the initial posture in the opening and closing direction is the posture in which the bending and stretching directions are rotated
- the opening and closing direction rotational posture is the open posture
- the bending and stretching direction force application linear member is an extension linear member that applies a force to the joint in the extension posture side
- the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
- the joint since the bending direction force (force toward the bent posture side) and the closing direction force (force toward the closed posture side) by the second elastic body act on the joint, the external force is applied to the joint. Inactive joints are in a flexed and closed position. With respect to such a joint, the retraction force applied to the extension wire-shaped member becomes an extension direction force (force toward the extension posture side), and the joint can be displaced to the extension posture (bending and stretching direction rotation posture). Further, when a retracting force is applied to the stretchable member, the retracting force is converted into an opening direction force (force toward the open posture side) by the force conversion member. As a result, the joint can be displaced to the open posture (rotating posture in the opening/closing direction).
- the joint can be displaced to the open posture after starting to be displaced to the extended posture.
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the opening and closing direction rotation posture is the closed posture;
- the bending and stretching direction force applying linear member is a bending linear member that applies a force to the joint in the bending posture side;
- the force in the opening/closing direction of the second elastic body is smaller than the force in the bending/stretching direction of the first elastic body.
- the retracting force applied to the bent linear member becomes a force in the bending direction (force toward the bending posture), and the joint can be displaced to the bending posture (rotating posture in the bending and stretching direction). Furthermore, since the opening/closing direction force of the second elastic body is smaller than the bending/stretching direction force of the first elastic body, the joint can be displaced to the bent posture after starting to be displaced to the closed posture. Thus, with this configuration, it is possible to change the posture about the first rotation axis and the posture about the second rotation axis only by the retraction force of the bent linear member. , the order in which they start their displacement can also be controlled.
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the open position is the open position
- the opening/closing direction rotation position is the closed position
- the bending/stretching direction force applying linear member is an expanding linear member that applies a force to the joint in the extending position side
- the second A bending linear member that exerts a force toward the bending posture side on the joint by applying a withdrawal force toward the first member side, wherein the bending and stretching direction force of the first elastic body is applied to the second elastic body. is smaller than the opening and closing direction force of
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the open position is the open position
- the opening/closing direction rotation position is the closed position
- the bending/stretching direction force application linear member is a bending linear member that applies a force to the joint in the bending position side
- the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
- the joint can be displaced to the closed posture after starting to be displaced to the bent posture.
- the force conversion member is provided at the end of the second member on the first member side, and rotates around the second rotation axis. It is rotatable substantially integrally with the two members, and has an action point on which the retracting force of the bending and stretching direction force action linear member acts, and the action point is in the opening/closing direction rotational posture relative to the second pivot shaft. located on the side.
- the position of the action point of the bending and stretching direction force action line member on which the withdrawal force acts is displaced toward the opening and closing direction rotation posture side of the second rotation shaft.
- the retracting force of the shaped member can be converted into a turning force to the opening/closing direction turning posture.
- the force conversion member includes a guide surface that guides the bending and stretching direction force acting linear member, and the guide surface is located on the first member side.
- the point of action is the end of the guide surface on the side of the second member.
- the opening/closing position displacement force acting linear member tends to deform linearly.
- the force can be converted into a turning force to the opening/closing direction turning posture.
- the present invention also covers a robot hand having the above-described joint movable structure, and such a robot hand is a robot hand having a thumb structure and at least one finger structure.
- the thumb structure has the joint movable structure according to claim 5 or 6, the joint is a CM joint, and the second member is a metacarpal.
- the joint movable structure of claim 5 when used for the CM joint of the thumb structure, a retraction force is applied to the extension linear member of the thumb structure in the extended posture and the open posture. When actuated, the thumb structure assumes a closed position. As a result, the space for receiving the other's hand can be increased when the robot hand shakes the hand. Further, when the joint movable structure of claim 6 is used for the CM joint of the thumb structure, when the bending linear member is pulled, the CM joint of the thumb structure starts to be displaced to the bending posture and then to the closed posture. Displace. Since the movement of the CM joints is similar to the movement of handshake, the robot hand having this configuration can give a feeling of handshake with a human when handshake with a human.
- FIG. 2 is a cross-sectional view taken along the line VV in FIG. 1;
- FIG. 4 is a plan view showing opening and closing motions of fingers in Examples 1 and 2; It is a side view showing the flexion extension operation
- FIG. 11 is a bottom view showing opening and closing motions of a finger in Example 3; It is (a) an upper perspective view and (b) a lower perspective view of the thumb in Example 4.
- FIG. 9B is a cross-sectional view taken along the line XX in FIG. 9A;
- FIG. 9B is a cross-sectional view taken along line XI-XI in FIG. 9(a);
- FIG. 9B is a cross-sectional view taken along line XII-XII in FIG. 9(a).
- It is a perspective view of a robot hand.
- FIG. 4 is a perspective view of a robot hand in the middle of a handshake action;
- FIG. 4 is a perspective view of a robot hand in the middle of a handshake action;
- FIG. 4 is a perspective view of a robot hand in a handshake state;
- FIG. 1 is an upper perspective view of a finger other than the thumb of a robot hand having a joint movable structure according to the present invention, for example, a right index finger.
- the top in this description means the back side of the hand.
- a finger F includes a metacarpal bone 1 (an example of the first member in the present invention), a proximal phalanx 2 (an example of the second member in the present invention), a middle phalanx 3 and a distal phalanx 4 .
- the metacarpal bone 1 and the proximal phalanx 2 are arranged adjacent to each other in the longitudinal direction and connected to form an MP joint 91 (corresponding to the joint in the present invention).
- the proximal phalanx 2 is rotated with respect to the metacarpal 1 by a rotation axis A1 (an example of the first rotation axis in the present invention) and a rotation axis A2 (an example of the second rotation axis in the present invention). It is possible to rotate around two axes.
- the rotation axis A1 and the rotation axis A2 are orthogonal.
- the proximal phalanx 2 and the middle phalanx 3 are connected to form a PIP joint 92
- the middle phalanx 3 and the distal phalanx 4 are connected to form a DIP joint 93
- the PIP joint 92 and the DIP joint 93 are rotatable about the rotation axis A3 and the rotation axis A4, respectively.
- the MP joint 91, the PIP joint 92, and the DIP joint 93 are rotated around the rotation axes A1, A3, and A4, respectively, thereby displacing each joint to a posture between an extended posture and a bent posture. is possible. Further, by rotating the MP joint 91 around the rotation axis A2, the MP joint 91, that is, the finger F can be displaced to a posture between the closed posture and the open posture.
- the open posture/closed posture are postures in which the finger is separated from/approached to other fingers.
- a posture in which no external force other than a spring, which will be described later, is acting on the finger F is called an initial posture.
- the flexion/extension direction postures (one of the flexion posture and the extension posture) of the MP joint 91, the PIP joint 92, and the DIP joint 93 when no external force other than the springs is acting are referred to as the initial posture in the flexion/extension direction, and the initial posture in the flexion/extension direction.
- the posture displaced from (the other of the bending posture or the stretching posture) is referred to as the bending and stretching direction rotation posture
- the posture of the MP joint 91 in the opening and closing direction when no external force other than the spring acts (one of the open posture or the closed posture) is referred to as an opening/closing direction initial attitude
- an attitude displaced from the opening/closing direction initial attitude (the other of the opening attitude and the closing attitude) is referred to as an opening/closing direction rotation attitude.
- the finger F (MP joint 91) shown in FIG. 1 is in the opening-closing direction initial posture, and is displaced to the opening-closing direction rotation posture by rotating the proximal phalanx 2 counterclockwise around the rotation axis A2.
- the fingertip side is the front side
- the opposite side is the back side.
- the metacarpal 1 is a substantially rectangular parallelepiped having two bent portions (see FIG. 3), and a groove 11 is formed at the front end of the side surface on the side of the initial posture in the opening/closing direction (the front side of the drawing). Insertion passages 12 and 13 are formed from the front end surface to the rear end surface for inserting an extended linear member W1 and a bent linear member W2, which will be described later.
- the front end surface of the metacarpal bone 1 is composed of a first front end surface 1a and a second front end surface 1b.
- the first front end surface 1a is a plane whose normal direction is the same as the axial direction of the finger F.
- the second front end face 1b is a plane inclined so that the end on the opening/closing direction rotational position side (the upper side in FIG. 3) is retreated rearward.
- the proximal phalanx 2 is a longitudinally elongated plate-like member with a slight thickness in the width direction, and a front connecting piece 21 projecting forward is formed at the front end.
- a connection hole 21a is formed through the front connection piece 21 in the width direction, and a bearing (not shown) is fitted therein.
- a pair of rear connection pieces 22, 22 projecting rearward are formed at the rear end of the proximal phalanx 2.
- a connection hole 22a is also formed through the rear connection piece 22 in the width direction.
- a space S is formed between the pair of rear connection pieces 22 , 22 .
- a groove 2 a is formed in the front end of the upper surface of the proximal phalanx 2 .
- the middle phalanx 3 is a plate-shaped member that is shorter than the proximal phalanx 2 and slightly thicker in the width direction, and has a connecting piece 31 that protrudes forward at the front end.
- a connection hole 31a is formed through the connection piece 31 in the width direction, and a bearing (not shown) is fitted therein.
- the rear end of the middle phalanx 3 is formed with a notch 3d into which the front connecting piece 21 of the proximal phalanx 2 is fitted.
- a connection hole 3c is formed through the middle phalanx 3 in the width direction in the portion where the cut 3d is formed. Grooves 3a and 3b are formed in the front and rear ends of the upper surface of the middle phalanx 3, respectively.
- the distal phalanx 4 is a plate-like member having a length similar to that of the middle phalanx 3 and having a slight thickness in the width direction.
- the rear end of the distal phalanx 4 is formed with a notch 4c into which the connection piece 31 of the middle phalanx 3 is fitted.
- a connection hole 4b is formed in the portion of the distal phalanx 4 where the cut 4c is formed.
- a groove 4 a is formed at the rear end of the upper surface of the distal phalanx 4 .
- the force conversion member 5 is a member with a size that fits into the space S formed at the rear end of the proximal phalanx 2 .
- a base portion 53 a first projecting portion 51 projecting from the base portion 53 toward the opening/closing direction initial posture side (lower side in FIG. and a second projecting portion 52 projecting toward the dynamic posture side (upper side in FIG. 3).
- Connection holes 51a and 52a are formed in the side surfaces of the first projecting portion 51 and the second projecting portion 52, respectively, and bearings (not shown) are fitted therein.
- a groove 51b is formed in the rear end side surface of the first projecting portion 51.
- a connection hole 5a is formed in the upper surface of the base portion 53. As shown in FIG.
- the upper surface of the base portion 53 is higher than the upper surfaces of the first overhanging portion 51 and the second overhanging portion 52 to form a protruding portion 54 .
- a guide surface 54a is formed on the side surface of the protruding portion 54 on the opening/closing direction rotational posture side toward the rear from the intermediate position and is inclined toward the opening/closing direction initial posture side. The function of this guide surface 54a will be described later.
- the rear end surface of the force conversion member 5 is composed of a first rear end surface 5b formed on the opening/closing direction initial posture side and a second rear end surface 5c formed on the opening/closing direction rotational posture side.
- the first rear end surface 5b is a plane having a normal line in a direction that coincides with the axial direction of the finger F, and faces the first front end surface 1a of the metacarpal bone 1 when the MP joint 91 is in the initial posture in the opening/closing direction.
- the second rear end surface 5c is an arc-shaped surface in which the end portion on the opening/closing direction rotational posture side is retracted forward.
- the connecting member 6 is a substantially plate-like member for connecting the metacarpal bone 1 and the force converting member 5, and has a connecting hole 6a extending vertically through the front end thereof, into which a bearing (not shown) is fitted. is Further, screw holes 6b and 6c for screwing to the metacarpal bone 1 are formed on the rear end side.
- the forces that cause the joint to assume the extended and flexed postures are referred to as the extension direction force and the flexion direction force
- the forces that cause the MP joint 91 to assume the closed and open postures are the closed direction force and the open direction force. It is called directional force.
- a spring 81 (an example of the first elastic body in the present invention) is provided in the space formed between the first projecting portion 51 of the force conversion member 5, the projecting portion 54, and the proximal phalanx 2.
- the spring 81 applies a force to the MP joint 91 so that it assumes an initial posture in the bending and stretching directions.
- a spring 83 (an example of a second elastic body in the present invention) is provided in a space formed between the second projecting portion 52 and the protruding portion 54 of the force conversion member 5 and the proximal phalanx 2 .
- the spring 83 applies force to the MP joint 91 so as to assume the initial posture in the opening/closing direction.
- a spring 82 (an example of a second elastic body in the present invention) is provided across the groove 11 of the metacarpal bone 1 and the groove 51b of the force conversion member 5 to apply force to the initial posture of the MP joint 91 in the opening/closing direction. I am making it work.
- the springs 82 and 83 apply force to the MP joint 91 so as to set the initial posture in the opening/closing direction, but only one of them may be applied.
- a spring 84 is provided across the groove 2a of the proximal phalanx 2 and the groove 3b of the middle phalanx 3, and exerts a force to bring the PIP joint 92 into the initial posture in the bending and stretching directions.
- a spring 85 is provided across the groove 3a of the middle phalanx 3 and the groove 4a of the distal phalanx 4, and exerts a force to bring the DIP joint 93 into the initial posture in the bending and stretching directions.
- the posture of the finger F in this embodiment can be changed by the stretched linear member W1 and the bent linear member W2.
- the stretched wire member W1 and the bent wire member W2 those having flexibility and durability are desirable, and for example, metal wires, PE lines, and the like can be used.
- the finger F in this embodiment passes through the extension linear member W1 and the bending linear member W2, so that the proximal phalanx 2 and the middle phalanx 3 are positioned on top of each other.
- Insertion passages 2b and 3e and lower insertion passages 2c and 3f are formed in the lower part.
- a stretchable member W1 is inserted through these upper insertion passages 2b and 3e.
- the front end of the extension wire member W1 is fixed to the front side surface of the groove 4a of the distal phalanx 4.
- the rear end of the stretchable member W1 extends through the insertion passage 12 of the metacarpal bone 1 and is connected to an actuator (not shown).
- a bent linear member W2 is inserted through the lower insertion passages 2c and 3f.
- the front end of the bent linear member W2 is fixed to the front surface of a recess formed in the lower portion of the distal phalanx 4.
- the rear end of the bent linear member W2 extends through the insertion passage 13 of the metacarpal bone 1 and is connected to an actuator (not shown).
- the stretchable member W1 passes inside the springs 85 and 84 when passing through the grooves 4a, 3a, 3b and 2a.
- connection piece 31 of the middle phalanx 3 is inserted into the notch 4c of the distal phalanx 4 so that the axial centers of the connection hole 4b and the connection hole 31a are aligned, and the fixing shaft is inserted through the connection hole 31a and the connection hole 4b. is inserted. This allows the DIP joint 93 to be displaced between the flexion posture/extension posture.
- connection piece 21 of the proximal phalanx 2 is inserted into the notch 3d of the middle phalanx 3 so that the axial centers of the connection hole 3c and the connection hole 21a are aligned, and the connection hole 21a and the connection hole 3c are inserted.
- the fixed shaft is inserted through the This allows the PIP joint 92 to be displaced between the flexion/extension positions.
- the front end of the spring 82 is fixed near the front end of the groove 51 b of the force conversion member 5 .
- the force conversion member 5 is inserted into the space S at the rear end of the proximal phalanx 2 so that the axial centers of the connection hole 22a and the connection holes 51a and 52a are aligned, and the connection hole 51a and the connection holes 22a, and A fixed shaft is inserted through each of the connection hole 52a and the connection hole 22a. This allows the MP joint 91 to be displaced between the flexion posture/extension posture.
- the springs 81, 83, 84, 85 are fixed.
- connection member 6 is put over the force conversion member 5 so that the axial centers of the connection holes 6a and 5a are aligned, and a fixed shaft is inserted from the connection hole 6a to the connection hole 5a. Then, screws are inserted through the screw holes 6b and 6c of the fixing member 6 and screwed to the metacarpal bone 1. ⁇ Furthermore, the rear portion of the spring 82 is fitted into the groove 11 to fix the rear end. This allows the MP joint 91 to be displaced between the closed posture and the open posture.
- the finger F is the index finger of the right hand
- the initial posture of the finger F is the extended posture and the closed posture. That is, the opening/closing direction initial posture is the closed posture, and the opening/closing direction rotational posture is the open posture. Because of this initial posture, springs 81, 82, 84, and 85 are extension coil springs and spring 83 is a compression coil spring in this embodiment.
- the springs 81, 84, and 85 exert forces in the direction of extension so that the MP joint 91, the PIP joint 92, and the DIP joint 93 are in the extension posture, respectively, and the springs 82 and 83 are closed so that the MP joint is in the closed posture. It exerts a directional force.
- the magnitudes of the forces in the direction of extension of the springs 81, 84, and 85 are made different. Specifically, the extension direction force of the spring 85 is the smallest, and the extension direction force of the spring 81 is the largest.
- the magnitude of the extension direction force of each spring can be adjusted by the spring constant. For example, by varying the number of turns of each spring, it is possible to set the above-described relation between the magnitudes of the forces in the direction of extension.
- FIG. 6A and 6B are plan views of the finger F in the extended and closed posture and the finger in the extended and open posture, respectively.
- the finger F is the index finger of the right hand
- the posture in which the finger F is separated from the middle finger on the right side that is, the posture in which the proximal phalanx 2 is rotated counterclockwise in the figure with respect to the metacarpal bone 1 is the open posture.
- the spring and the connecting member 6 are omitted in this figure.
- the extension wire-like member W1 passes from the distal phalanx 4 through the middle phalanx 3 and the proximal phalanx 2 to the space S at the rear end of the proximal phalanx 2 .
- the position at which the stretchable member W1 exits into the space S is not the center in the width direction in a plan view, but the position displaced toward the open posture side (rotating posture side in the opening/closing direction, leftward in the drawing).
- the stretchable member W1 is led out into the space S at a position displaced from the rotation axis A2 to the open posture side, and then is attached to the side surface of the projecting portion 54 of the force conversion member 5 on the open posture side. It is guided rearward along the guide surface 54a and is further guided rearward and to the closed posture side along the guide surface 54a to be inserted through the insertion passage 12 of the metacarpal bone 1. As shown in FIG.
- the retraction force of the stretchable member W1 should be relaxed.
- the force in the closing direction is applied to the MP joint 91 by the springs 82 and 83, and the MP joint 91 is displaced to the closed posture.
- FIG. 7 shows the operation of displacing the finger F to the bending posture (rotating posture in the bending and stretching direction) in this embodiment.
- the spring, the stretched wire member W1, and the bent wire member W2 are omitted.
- the extension linear member W1 is loosened, and an actuator (not shown) is operated to apply a retraction force to the bending linear member W2.
- the springs 81, 84, and 85 have different forces in the extension direction, it is possible to shift the timing at which the joints start to be displaced to the bent posture. Specifically, from the state in which all joints are in the extension posture (Fig.
- the finger F in this embodiment starts to extend in the order of the MP joint 91, the PIP joint 92, and the DIP joint 93 when shifting from the bent and closed posture to the extended and open posture. Then, after all the joints are displaced to the extended posture, the MP joint 91 shifts to the open posture. Further, when the finger F shifts from the extended and open posture to the bent and closed posture, the DIP joint 93, the PIP joint 92, and the MP joint 91 start bending in this order after the MP joint 91 shifts to the closed posture. can be made That is, the joints of the finger F in this embodiment can be made to operate in the same order as the human finger joints.
- such motions of the finger F are controlled by the stretchable wire member W1 and the bent wire member W2.
- a withdrawal force is generated in the extension linear member W1
- a withdrawal force is generated in the bending linear member W2.
- the initial posture of the finger F is a bent posture and a closed posture, so-called "goo". That is, the opening/closing direction initial posture is the closed posture, and the opening/closing direction rotational posture is the open posture.
- springs 81, 83, 84, and 85 are compression coil springs and spring 82 is an extension coil spring in this embodiment. That is, the springs 81, 84, and 85 exert bending direction forces so that the MP joint 91, the PIP joint 92, and the DIP joint 93 are in the bending posture, respectively, and the springs 82 and 83 are closed so that the MP joint is in the closed posture. It exerts a directional force.
- the present embodiment also includes the bent linear member W2, the bent linear member W2 does not need to be provided because it plays an auxiliary role.
- the fingers F in this embodiment also have the bending direction force of the springs 81, 84, 85 in order to define the order of starting the extension/bending of the MP joint 91, the PIP joint 92, and the DIP joint 93. differing in size.
- the spring constants of the respective springs are set so that the force in the bending direction of the spring 85 is the largest and the force in the bending direction of the spring 81 is the smallest.
- the relationship between the magnitude of the force in the bending direction of the spring 81 and the magnitude of the force in the closing direction of the springs 82 and 83 is also defined.
- the force in the closing direction of the springs 82 and 83 is greater than the force in the bending direction of the spring 81 . Furthermore, the force in the closing direction of the springs 82 and 83 is set larger than the force in the bending direction of the spring 85 .
- the initial posture of the finger F in this embodiment is the bent posture and the closed posture (FIG. 7(d)).
- the tensile force of the extension wire member W1 (corresponding to the bending and stretching direction force acting linear member in the present invention) is strengthened while loosening the tensile force of the bending wire member W2.
- the force in the bending direction of the spring 81 is the smallest, so the MP joint 91 begins to extend first (FIG. 6(c)).
- the PIP joint 92 and the DIP joint 93 provided with a spring having a small bending direction force start to extend sequentially, and the finger F assumes an extended posture (rotating posture in the bending and stretching direction) (FIG. 7(b) ⁇ FIG. 7( a), FIG. 6(a)).
- the force in the closing direction of the springs 82 and 83 is overcome, and the proximal phalanx 2 rotates about the rotation axis A2 by the action described in the first embodiment. It rotates clockwise, and the MP joint 91, that is, the finger F assumes an open posture (rotating posture in the opening/closing direction) (FIG. 6(b)).
- the finger F in this embodiment can define the rotation order of each joint in the same manner as in the first embodiment.
- the initial posture of the finger F is an extended posture and an open posture, so-called "par". That is, the opening/closing direction initial posture is the open posture, and the opening/closing direction rotational posture is the closed posture.
- the configuration of the finger F in this embodiment differs from that in the first and second embodiments in the arrangement of the metacarpal bone 1 and the force conversion member 5 . Specifically, as shown in the bottom view of FIG. 8, in this embodiment, the metacarpal bone 1 and the force conversion member 5 are arranged upside down from the arrangement in the first and second embodiments. . That is, in this embodiment, the guide surface 54a is provided on the lower surface side.
- connection member 6 is the bent linear member W2 that is guided by the guide surface 54a.
- connection member 6 may be provided on the lower side along with such a layout change, but in that case, it is necessary to have a shape that does not hinder the bending of the connection member 6MP joint.
- the springs 82, 84, 85 are extension coil springs and the springs 81, 83 are compression coil springs because of the configuration and initial posture described above. That is, the springs 81, 84, and 85 exert force in the direction of extension so that the MP joint 91, the PIP joint 92, and the DIP joint 93 are in the extended posture, and the springs 82 and 83 open the MP joint in the open posture. It exerts a directional force.
- the stretchable member W1 is also provided in this embodiment, the stretchable member W1 does not have to be provided because it plays an auxiliary role.
- the spring 81 is arranged on the lower surface side in this embodiment, it may be arranged on the upper surface side as in the first and second embodiments. In that case, the shape may be modified so that a space for accommodating the spring 81 is formed on the upper surface side of the force conversion member 5 . In this case, the spring 81 becomes a tension coil spring.
- a bending linear member W2 (corresponding to a bending and stretching direction force application linear member in the present invention) fixed to the lower portion near the front end of the distal phalanx 4 extends from the distal phalanx 4 to the middle phalanx 3 and It passes through the lower part of the proximal phalanx 2 and exits into the space S at the rear end of the proximal phalanx 2 .
- the exit position of the bent linear member W2 to the space S is not the center in the width direction in the bottom view, but the position displaced toward the closed posture side (rotating posture side in the opening/closing direction, leftward in the drawing).
- the bent linear member W2 is drawn out into the space S at a position displaced from the rotation axis A2 toward the closed posture, and then extends to the side surface of the projecting portion 54 of the force conversion member 5 on the closed posture side. It is guided rearward along the guide surface 54a and is further guided rearward and to the open posture side along the guide surface 54a to be inserted through the insertion passage 13 of the metacarpal bone 1. As shown in FIG.
- the relationship between the magnitudes of the forces of the springs is defined. Specifically, among the springs 81, 84, and 85, the extension direction force of the spring 85 is set to be the smallest, and the extension direction force of the spring 81 is set to be the largest. Further, the magnitude of the force in the opening direction of the springs 82 and 83 is set smaller than the magnitude of the force in the extension direction of the spring 81 . Further, the magnitude of the force in the opening direction of the springs 82 and 83 is set smaller than the magnitude of the force in the extension direction of the spring 85 .
- the MP joint 91 is displaced (rotated) to the closed position before the MP joint 91, the PIP joint 92, and the DIP joint 93 are bent. begins.
- the proximal phalanx 2 rotates counterclockwise in the figure together with the force conversion member 5 about the rotation axis A2.
- the first rear end surface 5b of the proximal phalanx 2 abuts the second front end surface 1b of the metacarpal 1
- the free rotation of the proximal phalanx 2 is restricted, and the MP joint 91 assumes a closed posture (Fig. 8(b)).
- the DIP joint 93 first begins to bend (FIG. 7(b)), and then the PIP joint 92 (FIG. 7 ( c)), the MP joint 91 begins to bend (FIG. 7(d)), and all the joints assume a bending posture.
- the movement from the MP joint 91 to the PIP is performed opposite to the above operation.
- the joint 92 and the DIP joint 93 begin to extend in order (FIG. 7(d) ⁇ (c) ⁇ (b) ⁇ (a)), and finally the MP joint 91 is displaced to the open posture (FIG. 8(a) )).
- the finger F is displaced to the initial posture by the action of each spring without exerting a withdrawal force on the stretchable member W1.
- the magnitude of the force of the elastic body (spring) that exerts the force so as to assume the initial posture in the bending and stretching directions and the elastic body (spring) that exerts the force so as to assume the initial posture in the opening/closing direction
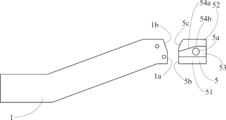
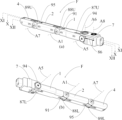
- the finger F includes a supporting bone 7 (an example of the first member in the present invention, corresponding to the great rhomboid bone of the human hand), a metacarpal bone 1 (an example of the second member in the present invention), a proximal phalanx 2 and a distal phalanx. 4.
- the supporting bone 7 and the metacarpal bone 1 are arranged adjacent to each other in the longitudinal direction and connected to form a CM joint 94 (corresponding to the joint in the present invention).
- the metacarpal bone 1 rotates with respect to the supporting bone 7 along a rotation axis A5 (an example of the first rotation axis in the present invention) and a rotation axis A6 (an example of the second rotation axis in the present invention). It is possible to rotate around two axes.
- the rotation axis A5 and the rotation axis A6 are perpendicular to each other.
- the metacarpal bone 1 and the proximal phalanx 2 are connected to form an MP joint 91
- the proximal phalanx 2 and the distal phalanx 4 are connected to form an IP joint 95 .
- the MP joint 91 and the IP joint 95 can rotate about the rotation axis A1 and the rotation axis A7, respectively.
- a spring 86 is provided on the side surface of the support bone 7 (left side surface in the drawing) to apply a force (opening/closing direction force) to the rear end of the metacarpal bone 1 .
- a spring 87U and a spring 87L are provided on the upper side and the lower side across the support bone 7 and the metacarpal bone 1.
- upper and lower springs 88U and 88L are provided across the metacarpal bone 1 and proximal phalanx 2
- upper and lower springs 89U and 89L are provided across the proximal phalanx 2 and distal phalanx 4. It is The initial postures of the finger F in this embodiment are the open posture and the extended posture.
- the opening/closing direction initial posture is the open posture
- the opening/closing direction rotational posture is the closed posture.
- the posture in which the metacarpal 1 rotates clockwise about the rotation axis A6 from the open posture of FIG. Therefore, the spring 86 is a tension coil spring that applies force to the metacarpal bone 1 toward the open posture side.
- springs 87U, 88U and 89U are extension coil springs
- springs 87L, 88L and 89L are compression coil springs.
- springs are provided on the upper and lower surfaces of the CM joint 94, MP joint 91 and IP joint 95, but springs may be provided on the upper side or the lower side to apply a force in the extension direction.
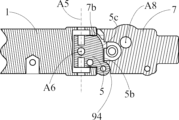
- FIG. 10 is a cross-sectional view taken along line XX in FIG. 9 near the CM joint 94.
- a force conversion member 5 is provided between the supporting bone 7 and the metacarpal bone 1 .
- the shape of the force conversion member 5 in this embodiment is slightly different from that in the above-described embodiments, the rear end surface is similarly formed on the opening/closing direction initial posture side (lower side in the figure), and and a second rear end surface 5c formed on the opening/closing direction rotation attitude side (upper side in the drawing).
- the first rear end face 5b is a plane having a normal line in a direction coinciding with the axial direction of the finger F, and the second rear end face 5c is in a rotational posture in the opening/closing direction.
- the side ends are arcuate surfaces that recede forward.
- the second rear end surface 5c of the force conversion member 5 abuts the second front end surface 7b of the supporting bone 7. contact, and further rotation is restricted.
- the second front end surface 7b is a plane having a normal line in a direction coinciding with the axial direction of the finger F.
- the flat surface may be inclined so that the end portion on the opening/closing direction rotational posture side (the upper side in FIG. 10) is retracted rearward.
- FIG. 11 is a cross-sectional view taken along line XI-XI in FIG.
- the force conversion member 5 has a projecting portion 54 formed on its upper side in the same manner as in the above-described embodiment.
- a guide surface 54a is formed on the side surface and is inclined rearward from the intermediate position toward the opening/closing direction initial posture side (open posture side). Also, the point that the front end portion 54b of the guide surface 54a functions as a point of action in the present invention is the same as in the above-described embodiment.
- the extension linear member W1 (corresponding to the bending and stretching direction force application linear member in the present invention) is arranged above the middle of the finger F, and the supporting bone 7 is in a slightly open posture (Fig. 11). middle left side), the slightly closed posture side (right side in the figure) of the guide surface 54a of the force conversion member 5, and the center of the metacarpal bone 1, the proximal phalanx 2, and the distal phalanx 4, and is fixed to the fingertip. ing. Therefore, when a retracting force is applied to the stretchable member W1 while the finger F is in the initial posture, the bent portion of the stretchable member W1 tends to straighten as described above.
- the stretchable member W1 abuts against the guide surface 54a of the force converting member 5, and the retracting force is converted into a clockwise rotating force about the rotating shaft A6.
- the metacarpal 1 rotates clockwise around the rotation axis A6, and the finger F is displaced to the closed posture.
- FIG. 12 is a cross-sectional view taken along line XII-XII in FIG.
- the bent linear member W2 is arranged below the middle of the finger F, and the support bone 7 is slightly closer to the closed posture side (right side in the figure). ). That is, the bent linear member W2 passes through the closed position side of the rotation axis A6. Further, the bent linear member W2 passes through substantially the middle of the metacarpal bone 1, the proximal phalanx 2, and the distal phalanx 4, and is fixed to the fingertip.
- the bent linear member W2 does not contact the guide surface 54a of the force conversion member 5, but a guide surface with which the bent linear member W2 contacts may be provided.
- the bending linear member W2 corresponds to the bending and stretching direction force acting linear member in the present invention. Even in this case, the same effect as described above can be obtained.
- each spring is set as follows. That is, when a retracting force is applied to the bending linear member W2, bending starts from the joint on the fingertip side, and then the finger F is displaced to the closed posture.
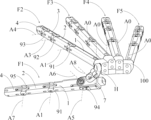
- the robot hand has a thumb F1 (corresponding to the thumb structure of the present invention), index finger F2, middle finger F3, ring finger F4 and little finger F5 (corresponding to the finger structure of the present invention).
- the thumb F1 is the same as the finger F shown in the fourth embodiment.
- the other fingers are slightly different in shape and construction from the above-described embodiment, but they are provided with a metacarpal bone 1, a proximal phalanx 2, a middle phalanx 3 and a distal phalanx 4, and an MP joint 91 and a PIP joint 92. and a DIP joint 93 are the same as in the above embodiment.
- the drawings in this embodiment show only the basic structure, and the springs and the like described in the above embodiments are omitted.
- the index finger F2, middle finger F3, ring finger F4 and little finger F5 are connected to the support 100 so as to be able to bend/extend and open and close.
- the same method as the connection between the metacarpal bone 1 and the proximal phalanx 2 in Examples 1 to 3 and the connection between the supporting bone 7 and the metacarpal bone 1 in Example 4 can be used.
- this connection uses the same method as the connection between the metacarpal bone 1 and the proximal phalanx 2 in the third embodiment.
- the initial postures of the index finger F2, the middle finger F3, the ring finger F4, and the little finger F5 are the extended and open posture, and by pulling the bent linear member W2 connected to each finger, each finger is displaced to the closed posture. Later, it is displaced to a bending posture.
- the direction of the closed posture of the index finger F2 and the middle finger F3 is clockwise in the drawing, and the direction of the closed posture of the ring finger F4 and the little finger F5 is counterclockwise in the drawing.
- the thumb F1 is connected to the support 100 via a hinge H. Note that the thumb F1 is rotatable with respect to the hinge H about the rotation axis A8.
- FIG. 13 shows the initial posture of the robot hand in this embodiment.
- the thumb F1, the index finger F2, the middle finger F3, the ring finger F4 and the little finger F5 are in the extended posture and the open posture.
- the extended linear member W1 connected to the thumb F1 and the bent linear member W2 connected to the thumb F1, index finger F2, middle finger F3, ring finger F4 and little finger F5 are retracted. exert force.
- the metacarpal bone 1 of the thumb F1 rotates clockwise about the rotation axis A6 with respect to the supporting bone 7, and the thumb F1 is displaced to the closed posture.
- the metacarpal bones 1 of the index finger F2 and the middle finger F3 rotate clockwise around the respective rotation axes A0 with respect to the support member 100, and the metacarpal bones 1 of the ring finger F4 and the little finger F5 rotate on the support member 100.
- they are rotated counterclockwise in the figure about the rotation axis A0, and the thumb F1, index finger F2, middle finger F3, and ring finger F4 are displaced to the closed posture.
- the robot hand in this state is shown in FIG.
- FIG. 15 shows the robot hand in this state.
- the thumb F1 rotates clockwise about the rotation axis A6 while maintaining the bent posture, and enters the closed posture. Displace.
- the thumb moves in this way, so when shaking hands with the robot hand of the present embodiment, it is possible to feel more human-like.
- the MP joint 91 can be in any posture in the opening/closing direction.
- the PIP joint 92 and the DIP joint 93 can be bent while the MP joint 91 is in the extended posture.
- the coil spring is used as the elastic body, but other springs such as leaf springs or elastic bodies other than springs may be used.
- the springs 81, 84, 85 are provided above the finger F, but they may be provided below the finger F.
- the spring 82 is provided on the side surface of the finger F on the opening/closing direction initial posture side, but may be provided on the side surface of the finger F on the opening/closing direction rotation posture side.
- the springs 82 and 83 are provided on the opening/closing direction initial attitude side and the opening/closing direction rotation attitude side with respect to the rotation axis A2, but these may be exchanged.
- the present invention can be applied to movable structures of robot joints, including joints at the base of fingers of robot hands.
- a movable structure By applying such a movable structure to the joints at the base of the fingers of the robot, it is possible to move from a clenched state (Goo shape) to an open state (Pa shape) or vice versa with a simple structure. be able to.
- Such robotic hands can also be used, for example, in remote communication systems.
- a robot hand having a movable joint structure according to the present invention and a monitor are installed at a point 1 where a user 1 is, and a hand movement such as a data glove is installed at a point 2 where a user 2 is. Install sensitive sensors and cameras.
- the image captured by the camera at the point 2 is displayed on the monitor at the point 1, and the user 1 can see the user 2 visually.
- a sensor senses the user's hand gripping motion
- the information is reflected in the motion of the robot hand at point 1, and the robot hand bends the joints of each finger F so as to grip the hand of user 1.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Prostheses (AREA)
Abstract
Structure d'articulation mobile comprenant un métacarpe (1) et une phalange proximale (2). La phalange proximale (2) peut se déplacer vers une position entre une position fléchie et une position déployée par rotation autour d'un axe de rotation (A1), et est capable de déplacement jusqu'à une position entre une position fermée et une position ouverte par rotation autour d'un axe de rotation (A2), qui se trouve dans un sens en intersection avec l'axe de rotation (A1). La structure d'articulation mobile est pourvue d'un ressort (81) qui exerce une force de sens de flexion/extension chevauchant le métacarpe (1) et la phalange proximale (2), et un ressort (82) qui exerce une force de sens d'ouverture/fermeture chevauchant le métacarpe (1) et la phalange proximale (2). En outre, la structure d'articulation mobile comprend : une force de sens de flexion/extension exerçant un élément linéaire qui génère une force sur le côté de position de rotation du sens de flexion/extension en exerçant une force de retrait sur le côté métacarpien (1) ; et un élément de conversion de force (5) qui convertit la force de retrait sur l'élément linéaire exerçant une force de sens de flexion/extension en une force qui déplace l'articulation vers une position de rotation de sens d'ouverture/fermeture.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023566119A JPWO2023105926A1 (fr) | 2021-12-06 | 2022-10-17 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021197422 | 2021-12-06 | ||
| JP2021-197422 | 2021-12-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023105926A1 true WO2023105926A1 (fr) | 2023-06-15 |
Family
ID=86730119
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/038499 WO2023105926A1 (fr) | 2021-12-06 | 2022-10-17 | Structure d'articulation mobile et main robot comprenant une structure d'articulation mobile |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2023105926A1 (fr) |
| WO (1) | WO2023105926A1 (fr) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62228391A (ja) * | 1986-03-31 | 1987-10-07 | 工業技術院長 | 人間類似型手掌機構 |
| WO2020105504A1 (fr) * | 2018-11-20 | 2020-05-28 | 株式会社メルティンMmi | Dispositif de main de robot |
-
2022
- 2022-10-17 JP JP2023566119A patent/JPWO2023105926A1/ja active Pending
- 2022-10-17 WO PCT/JP2022/038499 patent/WO2023105926A1/fr unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62228391A (ja) * | 1986-03-31 | 1987-10-07 | 工業技術院長 | 人間類似型手掌機構 |
| WO2020105504A1 (fr) * | 2018-11-20 | 2020-05-28 | 株式会社メルティンMmi | Dispositif de main de robot |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023105926A1 (fr) | 2023-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9126342B2 (en) | Self-adaptive mechanical finger and method | |
| CA2964199C (fr) | Doigt mecanique pour appareil de prehension | |
| Iberall | The nature of human prehension: Three dextrous hands in one | |
| US5762390A (en) | Underactuated mechanical finger with return actuation | |
| KR102067869B1 (ko) | 휴머노이드 로봇에 제공되도록 제작된 손의 작동 | |
| JP7009072B2 (ja) | 指機構およびこの指機構を組み込んだ人間型ハンド | |
| JP4643429B2 (ja) | ハンド装置 | |
| Ozawa et al. | Design and control of a three-fingered tendon-driven robotic hand with active and passive tendons | |
| US8840160B2 (en) | Mechanical finger | |
| KR20030029833A (ko) | 다리식 이동 로봇용 다관절 만곡 기구 및 다리식 이동 로봇 | |
| Makino et al. | Five-fingered hand with wide range of thumb using combination of machined springs and variable stiffness joints | |
| Hussain et al. | Design guidelines for a wearable robotic extra-finger | |
| WO2023105926A1 (fr) | Structure d'articulation mobile et main robot comprenant une structure d'articulation mobile | |
| KR20170101548A (ko) | 컴플라이언트 핑거유닛을 포함하는 로봇 핸드 어셈블리 | |
| CN114131644A (zh) | 机械手 | |
| KR20220144854A (ko) | 로봇 핸드 | |
| JP7141088B2 (ja) | 関節構造体及びロボットハンド | |
| KR102362574B1 (ko) | 로봇손 및 로봇손의 손가락 기구 | |
| US12090636B2 (en) | Robot hand device | |
| WO2022186033A1 (fr) | Main de robot pourvue d'un doigt articulé | |
| WO2023228540A1 (fr) | Main de robot | |
| CN115210050A (zh) | 机器人手 | |
| Rizk et al. | Grasp-stability analysis of a two-phalanx isotropic underactuated finger | |
| WO2021107150A1 (fr) | Mécanisme ayant une pluralité de doigts | |
| EP3878609B1 (fr) | Dispositif de main de robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22903860 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023566119 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |