WO2023105926A1 - Movable joint structure and robot hand comprising movable joint structure - Google Patents
Movable joint structure and robot hand comprising movable joint structure Download PDFInfo
- Publication number
- WO2023105926A1 WO2023105926A1 PCT/JP2022/038499 JP2022038499W WO2023105926A1 WO 2023105926 A1 WO2023105926 A1 WO 2023105926A1 JP 2022038499 W JP2022038499 W JP 2022038499W WO 2023105926 A1 WO2023105926 A1 WO 2023105926A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- posture
- force
- bending
- joint
- opening
- Prior art date
Links
- 238000005452 bending Methods 0.000 claims abstract description 164
- 238000006243 chemical reaction Methods 0.000 claims abstract description 38
- 210000003811 finger Anatomy 0.000 claims description 134
- 210000000236 metacarpal bone Anatomy 0.000 claims description 39
- 210000003813 thumb Anatomy 0.000 claims description 30
- 238000006073 displacement reaction Methods 0.000 abstract description 10
- 230000036544 posture Effects 0.000 description 332
- 230000033001 locomotion Effects 0.000 description 14
- 210000000988 bone and bone Anatomy 0.000 description 13
- 210000004247 hand Anatomy 0.000 description 10
- 210000004932 little finger Anatomy 0.000 description 10
- 238000003780 insertion Methods 0.000 description 9
- 230000037431 insertion Effects 0.000 description 9
- 230000006835 compression Effects 0.000 description 6
- 238000007906 compression Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 239000012530 fluid Substances 0.000 description 2
- 241000203475 Neopanax arboreus Species 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000001145 finger joint Anatomy 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 210000004935 right thumb Anatomy 0.000 description 1
- 238000007665 sagging Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
Definitions
- the present invention relates to a joint such as a finger of a robot, in particular, a movable structure for a joint capable of rotating about two axes, and a robot hand equipped with a movable structure for the joint.
- robot hands Equipment called manipulators and robot hands with articulated fingers (hereinafter collectively referred to as robot hands) have been developed and used at manufacturing sites.
- robot hands imitating human hands have been proposed for use in artificial hands and, in recent years, as remote communication tools.
- the MP joints can be rotated about two axes, and individual fluid pressure cylinders are connected to each of them to control the fluid pressure of each MP joint. flexion/extension operation and opening/closing operation.
- the present invention has been made in view of the above problems, and an object of the present invention is to provide a movable structure of a robot joint capable of controlling rotation about two axes with a simple configuration, and a robot using the movable structure of the joint. It is to provide a hand.
- a joint movable structure including a first member and a second member is configured such that the second member rotates about a first rotation axis to assume a bent posture. It is displaceable to a position between the extended position and the closed position and the open position by rotating the second member about a second rotating shaft in a direction intersecting the first rotating shaft.
- One of the bending and stretching postures is the initial posture in the bending and stretching direction
- the other is the rotating posture in the bending and stretching direction
- one of the closed posture and the open posture is the initial posture in the opening and closing direction.
- the first elastic body is provided across the first member and the second member to apply a bending and stretching direction force, which is a force toward the bending and stretching direction initial posture side, to the joint.
- a second elastic body provided across the first member and the second member for applying an opening/closing direction force, which is a force toward the opening/closing direction initial posture side, to the joint, and a retraction toward the first member.
- a bending and stretching direction force acting linear member that acts on the joint to apply a force to the bending and stretching direction rotational posture side by applying a force to the joint; and a force conversion member that converts the force into a force for displacing it to the opening/closing direction rotational posture.
- the joint in a state where no external force acts is in the initial posture in the bending and stretching direction and the initial posture in the opening and closing direction.
- a bending-stretching direction force application linear member When force is applied to such a joint by a bending-stretching direction force application linear member, it is possible to displace the joint from the bending-stretching direction initial posture to the bending-stretching direction rotational posture.
- the retracting force of the bending and stretching direction force acting linear member is converted by the force conversion member into a force that displaces the joint to the opening/closing direction rotation posture, the joint is displaced from the opening/closing direction initial posture to the opening/closing direction rotation posture. That is, in this configuration, the retracting force of the bending and stretching direction force acting linear member can be used to displace the posture about the first rotation axis and to displace the posture about the second rotation axis.
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the opening and closing direction rotational posture is the open posture
- the bending and stretching direction force application linear member is an extension linear member that applies a force to the joint in the extension posture side
- a bending linear member is provided that causes the joint to generate a force toward the bending posture side by applying a withdrawal force toward the first member side.
- the initial posture in the bending and stretching direction is the posture in which the bending and stretching directions are rotated
- the initial posture in the opening and closing direction is the posture in which the bending and stretching directions are rotated
- the opening and closing direction rotational posture is the open posture
- the bending and stretching direction force application linear member is an extension linear member that applies a force to the joint in the extension posture side
- the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
- the joint since the bending direction force (force toward the bent posture side) and the closing direction force (force toward the closed posture side) by the second elastic body act on the joint, the external force is applied to the joint. Inactive joints are in a flexed and closed position. With respect to such a joint, the retraction force applied to the extension wire-shaped member becomes an extension direction force (force toward the extension posture side), and the joint can be displaced to the extension posture (bending and stretching direction rotation posture). Further, when a retracting force is applied to the stretchable member, the retracting force is converted into an opening direction force (force toward the open posture side) by the force conversion member. As a result, the joint can be displaced to the open posture (rotating posture in the opening/closing direction).
- the joint can be displaced to the open posture after starting to be displaced to the extended posture.
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the opening and closing direction rotation posture is the closed posture;
- the bending and stretching direction force applying linear member is a bending linear member that applies a force to the joint in the bending posture side;
- the force in the opening/closing direction of the second elastic body is smaller than the force in the bending/stretching direction of the first elastic body.
- the retracting force applied to the bent linear member becomes a force in the bending direction (force toward the bending posture), and the joint can be displaced to the bending posture (rotating posture in the bending and stretching direction). Furthermore, since the opening/closing direction force of the second elastic body is smaller than the bending/stretching direction force of the first elastic body, the joint can be displaced to the bent posture after starting to be displaced to the closed posture. Thus, with this configuration, it is possible to change the posture about the first rotation axis and the posture about the second rotation axis only by the retraction force of the bent linear member. , the order in which they start their displacement can also be controlled.
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the open position is the open position
- the opening/closing direction rotation position is the closed position
- the bending/stretching direction force applying linear member is an expanding linear member that applies a force to the joint in the extending position side
- the second A bending linear member that exerts a force toward the bending posture side on the joint by applying a withdrawal force toward the first member side, wherein the bending and stretching direction force of the first elastic body is applied to the second elastic body. is smaller than the opening and closing direction force of
- the initial posture in the bending and stretching direction is the stretching posture
- the rotating posture in the bending and stretching direction is the bending posture
- the initial posture in the opening and closing direction is the posture.
- the open position is the open position
- the opening/closing direction rotation position is the closed position
- the bending/stretching direction force application linear member is a bending linear member that applies a force to the joint in the bending position side
- the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
- the joint can be displaced to the closed posture after starting to be displaced to the bent posture.
- the force conversion member is provided at the end of the second member on the first member side, and rotates around the second rotation axis. It is rotatable substantially integrally with the two members, and has an action point on which the retracting force of the bending and stretching direction force action linear member acts, and the action point is in the opening/closing direction rotational posture relative to the second pivot shaft. located on the side.
- the position of the action point of the bending and stretching direction force action line member on which the withdrawal force acts is displaced toward the opening and closing direction rotation posture side of the second rotation shaft.
- the retracting force of the shaped member can be converted into a turning force to the opening/closing direction turning posture.
- the force conversion member includes a guide surface that guides the bending and stretching direction force acting linear member, and the guide surface is located on the first member side.
- the point of action is the end of the guide surface on the side of the second member.
- the opening/closing position displacement force acting linear member tends to deform linearly.
- the force can be converted into a turning force to the opening/closing direction turning posture.
- the present invention also covers a robot hand having the above-described joint movable structure, and such a robot hand is a robot hand having a thumb structure and at least one finger structure.
- the thumb structure has the joint movable structure according to claim 5 or 6, the joint is a CM joint, and the second member is a metacarpal.
- the joint movable structure of claim 5 when used for the CM joint of the thumb structure, a retraction force is applied to the extension linear member of the thumb structure in the extended posture and the open posture. When actuated, the thumb structure assumes a closed position. As a result, the space for receiving the other's hand can be increased when the robot hand shakes the hand. Further, when the joint movable structure of claim 6 is used for the CM joint of the thumb structure, when the bending linear member is pulled, the CM joint of the thumb structure starts to be displaced to the bending posture and then to the closed posture. Displace. Since the movement of the CM joints is similar to the movement of handshake, the robot hand having this configuration can give a feeling of handshake with a human when handshake with a human.
- FIG. 2 is a cross-sectional view taken along the line VV in FIG. 1;
- FIG. 4 is a plan view showing opening and closing motions of fingers in Examples 1 and 2; It is a side view showing the flexion extension operation
- FIG. 11 is a bottom view showing opening and closing motions of a finger in Example 3; It is (a) an upper perspective view and (b) a lower perspective view of the thumb in Example 4.
- FIG. 9B is a cross-sectional view taken along the line XX in FIG. 9A;
- FIG. 9B is a cross-sectional view taken along line XI-XI in FIG. 9(a);
- FIG. 9B is a cross-sectional view taken along line XII-XII in FIG. 9(a).
- It is a perspective view of a robot hand.
- FIG. 4 is a perspective view of a robot hand in the middle of a handshake action;
- FIG. 4 is a perspective view of a robot hand in the middle of a handshake action;
- FIG. 4 is a perspective view of a robot hand in a handshake state;
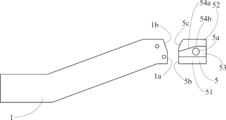
- FIG. 1 is an upper perspective view of a finger other than the thumb of a robot hand having a joint movable structure according to the present invention, for example, a right index finger.
- the top in this description means the back side of the hand.
- a finger F includes a metacarpal bone 1 (an example of the first member in the present invention), a proximal phalanx 2 (an example of the second member in the present invention), a middle phalanx 3 and a distal phalanx 4 .
- the metacarpal bone 1 and the proximal phalanx 2 are arranged adjacent to each other in the longitudinal direction and connected to form an MP joint 91 (corresponding to the joint in the present invention).
- the proximal phalanx 2 is rotated with respect to the metacarpal 1 by a rotation axis A1 (an example of the first rotation axis in the present invention) and a rotation axis A2 (an example of the second rotation axis in the present invention). It is possible to rotate around two axes.
- the rotation axis A1 and the rotation axis A2 are orthogonal.
- the proximal phalanx 2 and the middle phalanx 3 are connected to form a PIP joint 92
- the middle phalanx 3 and the distal phalanx 4 are connected to form a DIP joint 93
- the PIP joint 92 and the DIP joint 93 are rotatable about the rotation axis A3 and the rotation axis A4, respectively.
- the MP joint 91, the PIP joint 92, and the DIP joint 93 are rotated around the rotation axes A1, A3, and A4, respectively, thereby displacing each joint to a posture between an extended posture and a bent posture. is possible. Further, by rotating the MP joint 91 around the rotation axis A2, the MP joint 91, that is, the finger F can be displaced to a posture between the closed posture and the open posture.
- the open posture/closed posture are postures in which the finger is separated from/approached to other fingers.
- a posture in which no external force other than a spring, which will be described later, is acting on the finger F is called an initial posture.
- the flexion/extension direction postures (one of the flexion posture and the extension posture) of the MP joint 91, the PIP joint 92, and the DIP joint 93 when no external force other than the springs is acting are referred to as the initial posture in the flexion/extension direction, and the initial posture in the flexion/extension direction.
- the posture displaced from (the other of the bending posture or the stretching posture) is referred to as the bending and stretching direction rotation posture
- the posture of the MP joint 91 in the opening and closing direction when no external force other than the spring acts (one of the open posture or the closed posture) is referred to as an opening/closing direction initial attitude
- an attitude displaced from the opening/closing direction initial attitude (the other of the opening attitude and the closing attitude) is referred to as an opening/closing direction rotation attitude.
- the finger F (MP joint 91) shown in FIG. 1 is in the opening-closing direction initial posture, and is displaced to the opening-closing direction rotation posture by rotating the proximal phalanx 2 counterclockwise around the rotation axis A2.
- the fingertip side is the front side
- the opposite side is the back side.
- the metacarpal 1 is a substantially rectangular parallelepiped having two bent portions (see FIG. 3), and a groove 11 is formed at the front end of the side surface on the side of the initial posture in the opening/closing direction (the front side of the drawing). Insertion passages 12 and 13 are formed from the front end surface to the rear end surface for inserting an extended linear member W1 and a bent linear member W2, which will be described later.
- the front end surface of the metacarpal bone 1 is composed of a first front end surface 1a and a second front end surface 1b.
- the first front end surface 1a is a plane whose normal direction is the same as the axial direction of the finger F.
- the second front end face 1b is a plane inclined so that the end on the opening/closing direction rotational position side (the upper side in FIG. 3) is retreated rearward.
- the proximal phalanx 2 is a longitudinally elongated plate-like member with a slight thickness in the width direction, and a front connecting piece 21 projecting forward is formed at the front end.
- a connection hole 21a is formed through the front connection piece 21 in the width direction, and a bearing (not shown) is fitted therein.
- a pair of rear connection pieces 22, 22 projecting rearward are formed at the rear end of the proximal phalanx 2.
- a connection hole 22a is also formed through the rear connection piece 22 in the width direction.
- a space S is formed between the pair of rear connection pieces 22 , 22 .
- a groove 2 a is formed in the front end of the upper surface of the proximal phalanx 2 .
- the middle phalanx 3 is a plate-shaped member that is shorter than the proximal phalanx 2 and slightly thicker in the width direction, and has a connecting piece 31 that protrudes forward at the front end.
- a connection hole 31a is formed through the connection piece 31 in the width direction, and a bearing (not shown) is fitted therein.
- the rear end of the middle phalanx 3 is formed with a notch 3d into which the front connecting piece 21 of the proximal phalanx 2 is fitted.
- a connection hole 3c is formed through the middle phalanx 3 in the width direction in the portion where the cut 3d is formed. Grooves 3a and 3b are formed in the front and rear ends of the upper surface of the middle phalanx 3, respectively.
- the distal phalanx 4 is a plate-like member having a length similar to that of the middle phalanx 3 and having a slight thickness in the width direction.
- the rear end of the distal phalanx 4 is formed with a notch 4c into which the connection piece 31 of the middle phalanx 3 is fitted.
- a connection hole 4b is formed in the portion of the distal phalanx 4 where the cut 4c is formed.
- a groove 4 a is formed at the rear end of the upper surface of the distal phalanx 4 .
- the force conversion member 5 is a member with a size that fits into the space S formed at the rear end of the proximal phalanx 2 .
- a base portion 53 a first projecting portion 51 projecting from the base portion 53 toward the opening/closing direction initial posture side (lower side in FIG. and a second projecting portion 52 projecting toward the dynamic posture side (upper side in FIG. 3).
- Connection holes 51a and 52a are formed in the side surfaces of the first projecting portion 51 and the second projecting portion 52, respectively, and bearings (not shown) are fitted therein.
- a groove 51b is formed in the rear end side surface of the first projecting portion 51.
- a connection hole 5a is formed in the upper surface of the base portion 53. As shown in FIG.
- the upper surface of the base portion 53 is higher than the upper surfaces of the first overhanging portion 51 and the second overhanging portion 52 to form a protruding portion 54 .
- a guide surface 54a is formed on the side surface of the protruding portion 54 on the opening/closing direction rotational posture side toward the rear from the intermediate position and is inclined toward the opening/closing direction initial posture side. The function of this guide surface 54a will be described later.
- the rear end surface of the force conversion member 5 is composed of a first rear end surface 5b formed on the opening/closing direction initial posture side and a second rear end surface 5c formed on the opening/closing direction rotational posture side.
- the first rear end surface 5b is a plane having a normal line in a direction that coincides with the axial direction of the finger F, and faces the first front end surface 1a of the metacarpal bone 1 when the MP joint 91 is in the initial posture in the opening/closing direction.
- the second rear end surface 5c is an arc-shaped surface in which the end portion on the opening/closing direction rotational posture side is retracted forward.
- the connecting member 6 is a substantially plate-like member for connecting the metacarpal bone 1 and the force converting member 5, and has a connecting hole 6a extending vertically through the front end thereof, into which a bearing (not shown) is fitted. is Further, screw holes 6b and 6c for screwing to the metacarpal bone 1 are formed on the rear end side.
- the forces that cause the joint to assume the extended and flexed postures are referred to as the extension direction force and the flexion direction force
- the forces that cause the MP joint 91 to assume the closed and open postures are the closed direction force and the open direction force. It is called directional force.
- a spring 81 (an example of the first elastic body in the present invention) is provided in the space formed between the first projecting portion 51 of the force conversion member 5, the projecting portion 54, and the proximal phalanx 2.
- the spring 81 applies a force to the MP joint 91 so that it assumes an initial posture in the bending and stretching directions.
- a spring 83 (an example of a second elastic body in the present invention) is provided in a space formed between the second projecting portion 52 and the protruding portion 54 of the force conversion member 5 and the proximal phalanx 2 .
- the spring 83 applies force to the MP joint 91 so as to assume the initial posture in the opening/closing direction.
- a spring 82 (an example of a second elastic body in the present invention) is provided across the groove 11 of the metacarpal bone 1 and the groove 51b of the force conversion member 5 to apply force to the initial posture of the MP joint 91 in the opening/closing direction. I am making it work.
- the springs 82 and 83 apply force to the MP joint 91 so as to set the initial posture in the opening/closing direction, but only one of them may be applied.
- a spring 84 is provided across the groove 2a of the proximal phalanx 2 and the groove 3b of the middle phalanx 3, and exerts a force to bring the PIP joint 92 into the initial posture in the bending and stretching directions.
- a spring 85 is provided across the groove 3a of the middle phalanx 3 and the groove 4a of the distal phalanx 4, and exerts a force to bring the DIP joint 93 into the initial posture in the bending and stretching directions.
- the posture of the finger F in this embodiment can be changed by the stretched linear member W1 and the bent linear member W2.
- the stretched wire member W1 and the bent wire member W2 those having flexibility and durability are desirable, and for example, metal wires, PE lines, and the like can be used.
- the finger F in this embodiment passes through the extension linear member W1 and the bending linear member W2, so that the proximal phalanx 2 and the middle phalanx 3 are positioned on top of each other.
- Insertion passages 2b and 3e and lower insertion passages 2c and 3f are formed in the lower part.
- a stretchable member W1 is inserted through these upper insertion passages 2b and 3e.
- the front end of the extension wire member W1 is fixed to the front side surface of the groove 4a of the distal phalanx 4.
- the rear end of the stretchable member W1 extends through the insertion passage 12 of the metacarpal bone 1 and is connected to an actuator (not shown).
- a bent linear member W2 is inserted through the lower insertion passages 2c and 3f.
- the front end of the bent linear member W2 is fixed to the front surface of a recess formed in the lower portion of the distal phalanx 4.
- the rear end of the bent linear member W2 extends through the insertion passage 13 of the metacarpal bone 1 and is connected to an actuator (not shown).
- the stretchable member W1 passes inside the springs 85 and 84 when passing through the grooves 4a, 3a, 3b and 2a.
- connection piece 31 of the middle phalanx 3 is inserted into the notch 4c of the distal phalanx 4 so that the axial centers of the connection hole 4b and the connection hole 31a are aligned, and the fixing shaft is inserted through the connection hole 31a and the connection hole 4b. is inserted. This allows the DIP joint 93 to be displaced between the flexion posture/extension posture.
- connection piece 21 of the proximal phalanx 2 is inserted into the notch 3d of the middle phalanx 3 so that the axial centers of the connection hole 3c and the connection hole 21a are aligned, and the connection hole 21a and the connection hole 3c are inserted.
- the fixed shaft is inserted through the This allows the PIP joint 92 to be displaced between the flexion/extension positions.
- the front end of the spring 82 is fixed near the front end of the groove 51 b of the force conversion member 5 .
- the force conversion member 5 is inserted into the space S at the rear end of the proximal phalanx 2 so that the axial centers of the connection hole 22a and the connection holes 51a and 52a are aligned, and the connection hole 51a and the connection holes 22a, and A fixed shaft is inserted through each of the connection hole 52a and the connection hole 22a. This allows the MP joint 91 to be displaced between the flexion posture/extension posture.
- the springs 81, 83, 84, 85 are fixed.
- connection member 6 is put over the force conversion member 5 so that the axial centers of the connection holes 6a and 5a are aligned, and a fixed shaft is inserted from the connection hole 6a to the connection hole 5a. Then, screws are inserted through the screw holes 6b and 6c of the fixing member 6 and screwed to the metacarpal bone 1. ⁇ Furthermore, the rear portion of the spring 82 is fitted into the groove 11 to fix the rear end. This allows the MP joint 91 to be displaced between the closed posture and the open posture.
- the finger F is the index finger of the right hand
- the initial posture of the finger F is the extended posture and the closed posture. That is, the opening/closing direction initial posture is the closed posture, and the opening/closing direction rotational posture is the open posture. Because of this initial posture, springs 81, 82, 84, and 85 are extension coil springs and spring 83 is a compression coil spring in this embodiment.
- the springs 81, 84, and 85 exert forces in the direction of extension so that the MP joint 91, the PIP joint 92, and the DIP joint 93 are in the extension posture, respectively, and the springs 82 and 83 are closed so that the MP joint is in the closed posture. It exerts a directional force.
- the magnitudes of the forces in the direction of extension of the springs 81, 84, and 85 are made different. Specifically, the extension direction force of the spring 85 is the smallest, and the extension direction force of the spring 81 is the largest.
- the magnitude of the extension direction force of each spring can be adjusted by the spring constant. For example, by varying the number of turns of each spring, it is possible to set the above-described relation between the magnitudes of the forces in the direction of extension.
- FIG. 6A and 6B are plan views of the finger F in the extended and closed posture and the finger in the extended and open posture, respectively.
- the finger F is the index finger of the right hand
- the posture in which the finger F is separated from the middle finger on the right side that is, the posture in which the proximal phalanx 2 is rotated counterclockwise in the figure with respect to the metacarpal bone 1 is the open posture.
- the spring and the connecting member 6 are omitted in this figure.
- the extension wire-like member W1 passes from the distal phalanx 4 through the middle phalanx 3 and the proximal phalanx 2 to the space S at the rear end of the proximal phalanx 2 .
- the position at which the stretchable member W1 exits into the space S is not the center in the width direction in a plan view, but the position displaced toward the open posture side (rotating posture side in the opening/closing direction, leftward in the drawing).
- the stretchable member W1 is led out into the space S at a position displaced from the rotation axis A2 to the open posture side, and then is attached to the side surface of the projecting portion 54 of the force conversion member 5 on the open posture side. It is guided rearward along the guide surface 54a and is further guided rearward and to the closed posture side along the guide surface 54a to be inserted through the insertion passage 12 of the metacarpal bone 1. As shown in FIG.
- the retraction force of the stretchable member W1 should be relaxed.
- the force in the closing direction is applied to the MP joint 91 by the springs 82 and 83, and the MP joint 91 is displaced to the closed posture.
- FIG. 7 shows the operation of displacing the finger F to the bending posture (rotating posture in the bending and stretching direction) in this embodiment.
- the spring, the stretched wire member W1, and the bent wire member W2 are omitted.
- the extension linear member W1 is loosened, and an actuator (not shown) is operated to apply a retraction force to the bending linear member W2.
- the springs 81, 84, and 85 have different forces in the extension direction, it is possible to shift the timing at which the joints start to be displaced to the bent posture. Specifically, from the state in which all joints are in the extension posture (Fig.
- the finger F in this embodiment starts to extend in the order of the MP joint 91, the PIP joint 92, and the DIP joint 93 when shifting from the bent and closed posture to the extended and open posture. Then, after all the joints are displaced to the extended posture, the MP joint 91 shifts to the open posture. Further, when the finger F shifts from the extended and open posture to the bent and closed posture, the DIP joint 93, the PIP joint 92, and the MP joint 91 start bending in this order after the MP joint 91 shifts to the closed posture. can be made That is, the joints of the finger F in this embodiment can be made to operate in the same order as the human finger joints.
- such motions of the finger F are controlled by the stretchable wire member W1 and the bent wire member W2.
- a withdrawal force is generated in the extension linear member W1
- a withdrawal force is generated in the bending linear member W2.
- the initial posture of the finger F is a bent posture and a closed posture, so-called "goo". That is, the opening/closing direction initial posture is the closed posture, and the opening/closing direction rotational posture is the open posture.
- springs 81, 83, 84, and 85 are compression coil springs and spring 82 is an extension coil spring in this embodiment. That is, the springs 81, 84, and 85 exert bending direction forces so that the MP joint 91, the PIP joint 92, and the DIP joint 93 are in the bending posture, respectively, and the springs 82 and 83 are closed so that the MP joint is in the closed posture. It exerts a directional force.
- the present embodiment also includes the bent linear member W2, the bent linear member W2 does not need to be provided because it plays an auxiliary role.
- the fingers F in this embodiment also have the bending direction force of the springs 81, 84, 85 in order to define the order of starting the extension/bending of the MP joint 91, the PIP joint 92, and the DIP joint 93. differing in size.
- the spring constants of the respective springs are set so that the force in the bending direction of the spring 85 is the largest and the force in the bending direction of the spring 81 is the smallest.
- the relationship between the magnitude of the force in the bending direction of the spring 81 and the magnitude of the force in the closing direction of the springs 82 and 83 is also defined.
- the force in the closing direction of the springs 82 and 83 is greater than the force in the bending direction of the spring 81 . Furthermore, the force in the closing direction of the springs 82 and 83 is set larger than the force in the bending direction of the spring 85 .
- the initial posture of the finger F in this embodiment is the bent posture and the closed posture (FIG. 7(d)).
- the tensile force of the extension wire member W1 (corresponding to the bending and stretching direction force acting linear member in the present invention) is strengthened while loosening the tensile force of the bending wire member W2.
- the force in the bending direction of the spring 81 is the smallest, so the MP joint 91 begins to extend first (FIG. 6(c)).
- the PIP joint 92 and the DIP joint 93 provided with a spring having a small bending direction force start to extend sequentially, and the finger F assumes an extended posture (rotating posture in the bending and stretching direction) (FIG. 7(b) ⁇ FIG. 7( a), FIG. 6(a)).
- the force in the closing direction of the springs 82 and 83 is overcome, and the proximal phalanx 2 rotates about the rotation axis A2 by the action described in the first embodiment. It rotates clockwise, and the MP joint 91, that is, the finger F assumes an open posture (rotating posture in the opening/closing direction) (FIG. 6(b)).
- the finger F in this embodiment can define the rotation order of each joint in the same manner as in the first embodiment.
- the initial posture of the finger F is an extended posture and an open posture, so-called "par". That is, the opening/closing direction initial posture is the open posture, and the opening/closing direction rotational posture is the closed posture.
- the configuration of the finger F in this embodiment differs from that in the first and second embodiments in the arrangement of the metacarpal bone 1 and the force conversion member 5 . Specifically, as shown in the bottom view of FIG. 8, in this embodiment, the metacarpal bone 1 and the force conversion member 5 are arranged upside down from the arrangement in the first and second embodiments. . That is, in this embodiment, the guide surface 54a is provided on the lower surface side.
- connection member 6 is the bent linear member W2 that is guided by the guide surface 54a.
- connection member 6 may be provided on the lower side along with such a layout change, but in that case, it is necessary to have a shape that does not hinder the bending of the connection member 6MP joint.
- the springs 82, 84, 85 are extension coil springs and the springs 81, 83 are compression coil springs because of the configuration and initial posture described above. That is, the springs 81, 84, and 85 exert force in the direction of extension so that the MP joint 91, the PIP joint 92, and the DIP joint 93 are in the extended posture, and the springs 82 and 83 open the MP joint in the open posture. It exerts a directional force.
- the stretchable member W1 is also provided in this embodiment, the stretchable member W1 does not have to be provided because it plays an auxiliary role.
- the spring 81 is arranged on the lower surface side in this embodiment, it may be arranged on the upper surface side as in the first and second embodiments. In that case, the shape may be modified so that a space for accommodating the spring 81 is formed on the upper surface side of the force conversion member 5 . In this case, the spring 81 becomes a tension coil spring.
- a bending linear member W2 (corresponding to a bending and stretching direction force application linear member in the present invention) fixed to the lower portion near the front end of the distal phalanx 4 extends from the distal phalanx 4 to the middle phalanx 3 and It passes through the lower part of the proximal phalanx 2 and exits into the space S at the rear end of the proximal phalanx 2 .
- the exit position of the bent linear member W2 to the space S is not the center in the width direction in the bottom view, but the position displaced toward the closed posture side (rotating posture side in the opening/closing direction, leftward in the drawing).
- the bent linear member W2 is drawn out into the space S at a position displaced from the rotation axis A2 toward the closed posture, and then extends to the side surface of the projecting portion 54 of the force conversion member 5 on the closed posture side. It is guided rearward along the guide surface 54a and is further guided rearward and to the open posture side along the guide surface 54a to be inserted through the insertion passage 13 of the metacarpal bone 1. As shown in FIG.
- the relationship between the magnitudes of the forces of the springs is defined. Specifically, among the springs 81, 84, and 85, the extension direction force of the spring 85 is set to be the smallest, and the extension direction force of the spring 81 is set to be the largest. Further, the magnitude of the force in the opening direction of the springs 82 and 83 is set smaller than the magnitude of the force in the extension direction of the spring 81 . Further, the magnitude of the force in the opening direction of the springs 82 and 83 is set smaller than the magnitude of the force in the extension direction of the spring 85 .
- the MP joint 91 is displaced (rotated) to the closed position before the MP joint 91, the PIP joint 92, and the DIP joint 93 are bent. begins.
- the proximal phalanx 2 rotates counterclockwise in the figure together with the force conversion member 5 about the rotation axis A2.
- the first rear end surface 5b of the proximal phalanx 2 abuts the second front end surface 1b of the metacarpal 1
- the free rotation of the proximal phalanx 2 is restricted, and the MP joint 91 assumes a closed posture (Fig. 8(b)).
- the DIP joint 93 first begins to bend (FIG. 7(b)), and then the PIP joint 92 (FIG. 7 ( c)), the MP joint 91 begins to bend (FIG. 7(d)), and all the joints assume a bending posture.
- the movement from the MP joint 91 to the PIP is performed opposite to the above operation.
- the joint 92 and the DIP joint 93 begin to extend in order (FIG. 7(d) ⁇ (c) ⁇ (b) ⁇ (a)), and finally the MP joint 91 is displaced to the open posture (FIG. 8(a) )).
- the finger F is displaced to the initial posture by the action of each spring without exerting a withdrawal force on the stretchable member W1.
- the magnitude of the force of the elastic body (spring) that exerts the force so as to assume the initial posture in the bending and stretching directions and the elastic body (spring) that exerts the force so as to assume the initial posture in the opening/closing direction
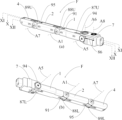
- the finger F includes a supporting bone 7 (an example of the first member in the present invention, corresponding to the great rhomboid bone of the human hand), a metacarpal bone 1 (an example of the second member in the present invention), a proximal phalanx 2 and a distal phalanx. 4.
- the supporting bone 7 and the metacarpal bone 1 are arranged adjacent to each other in the longitudinal direction and connected to form a CM joint 94 (corresponding to the joint in the present invention).
- the metacarpal bone 1 rotates with respect to the supporting bone 7 along a rotation axis A5 (an example of the first rotation axis in the present invention) and a rotation axis A6 (an example of the second rotation axis in the present invention). It is possible to rotate around two axes.
- the rotation axis A5 and the rotation axis A6 are perpendicular to each other.
- the metacarpal bone 1 and the proximal phalanx 2 are connected to form an MP joint 91
- the proximal phalanx 2 and the distal phalanx 4 are connected to form an IP joint 95 .
- the MP joint 91 and the IP joint 95 can rotate about the rotation axis A1 and the rotation axis A7, respectively.
- a spring 86 is provided on the side surface of the support bone 7 (left side surface in the drawing) to apply a force (opening/closing direction force) to the rear end of the metacarpal bone 1 .
- a spring 87U and a spring 87L are provided on the upper side and the lower side across the support bone 7 and the metacarpal bone 1.
- upper and lower springs 88U and 88L are provided across the metacarpal bone 1 and proximal phalanx 2
- upper and lower springs 89U and 89L are provided across the proximal phalanx 2 and distal phalanx 4. It is The initial postures of the finger F in this embodiment are the open posture and the extended posture.
- the opening/closing direction initial posture is the open posture
- the opening/closing direction rotational posture is the closed posture.
- the posture in which the metacarpal 1 rotates clockwise about the rotation axis A6 from the open posture of FIG. Therefore, the spring 86 is a tension coil spring that applies force to the metacarpal bone 1 toward the open posture side.
- springs 87U, 88U and 89U are extension coil springs
- springs 87L, 88L and 89L are compression coil springs.
- springs are provided on the upper and lower surfaces of the CM joint 94, MP joint 91 and IP joint 95, but springs may be provided on the upper side or the lower side to apply a force in the extension direction.
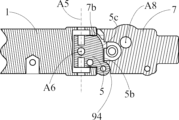
- FIG. 10 is a cross-sectional view taken along line XX in FIG. 9 near the CM joint 94.
- a force conversion member 5 is provided between the supporting bone 7 and the metacarpal bone 1 .
- the shape of the force conversion member 5 in this embodiment is slightly different from that in the above-described embodiments, the rear end surface is similarly formed on the opening/closing direction initial posture side (lower side in the figure), and and a second rear end surface 5c formed on the opening/closing direction rotation attitude side (upper side in the drawing).
- the first rear end face 5b is a plane having a normal line in a direction coinciding with the axial direction of the finger F, and the second rear end face 5c is in a rotational posture in the opening/closing direction.
- the side ends are arcuate surfaces that recede forward.
- the second rear end surface 5c of the force conversion member 5 abuts the second front end surface 7b of the supporting bone 7. contact, and further rotation is restricted.
- the second front end surface 7b is a plane having a normal line in a direction coinciding with the axial direction of the finger F.
- the flat surface may be inclined so that the end portion on the opening/closing direction rotational posture side (the upper side in FIG. 10) is retracted rearward.
- FIG. 11 is a cross-sectional view taken along line XI-XI in FIG.
- the force conversion member 5 has a projecting portion 54 formed on its upper side in the same manner as in the above-described embodiment.
- a guide surface 54a is formed on the side surface and is inclined rearward from the intermediate position toward the opening/closing direction initial posture side (open posture side). Also, the point that the front end portion 54b of the guide surface 54a functions as a point of action in the present invention is the same as in the above-described embodiment.
- the extension linear member W1 (corresponding to the bending and stretching direction force application linear member in the present invention) is arranged above the middle of the finger F, and the supporting bone 7 is in a slightly open posture (Fig. 11). middle left side), the slightly closed posture side (right side in the figure) of the guide surface 54a of the force conversion member 5, and the center of the metacarpal bone 1, the proximal phalanx 2, and the distal phalanx 4, and is fixed to the fingertip. ing. Therefore, when a retracting force is applied to the stretchable member W1 while the finger F is in the initial posture, the bent portion of the stretchable member W1 tends to straighten as described above.
- the stretchable member W1 abuts against the guide surface 54a of the force converting member 5, and the retracting force is converted into a clockwise rotating force about the rotating shaft A6.
- the metacarpal 1 rotates clockwise around the rotation axis A6, and the finger F is displaced to the closed posture.
- FIG. 12 is a cross-sectional view taken along line XII-XII in FIG.
- the bent linear member W2 is arranged below the middle of the finger F, and the support bone 7 is slightly closer to the closed posture side (right side in the figure). ). That is, the bent linear member W2 passes through the closed position side of the rotation axis A6. Further, the bent linear member W2 passes through substantially the middle of the metacarpal bone 1, the proximal phalanx 2, and the distal phalanx 4, and is fixed to the fingertip.
- the bent linear member W2 does not contact the guide surface 54a of the force conversion member 5, but a guide surface with which the bent linear member W2 contacts may be provided.
- the bending linear member W2 corresponds to the bending and stretching direction force acting linear member in the present invention. Even in this case, the same effect as described above can be obtained.
- each spring is set as follows. That is, when a retracting force is applied to the bending linear member W2, bending starts from the joint on the fingertip side, and then the finger F is displaced to the closed posture.
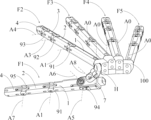
- the robot hand has a thumb F1 (corresponding to the thumb structure of the present invention), index finger F2, middle finger F3, ring finger F4 and little finger F5 (corresponding to the finger structure of the present invention).
- the thumb F1 is the same as the finger F shown in the fourth embodiment.
- the other fingers are slightly different in shape and construction from the above-described embodiment, but they are provided with a metacarpal bone 1, a proximal phalanx 2, a middle phalanx 3 and a distal phalanx 4, and an MP joint 91 and a PIP joint 92. and a DIP joint 93 are the same as in the above embodiment.
- the drawings in this embodiment show only the basic structure, and the springs and the like described in the above embodiments are omitted.
- the index finger F2, middle finger F3, ring finger F4 and little finger F5 are connected to the support 100 so as to be able to bend/extend and open and close.
- the same method as the connection between the metacarpal bone 1 and the proximal phalanx 2 in Examples 1 to 3 and the connection between the supporting bone 7 and the metacarpal bone 1 in Example 4 can be used.
- this connection uses the same method as the connection between the metacarpal bone 1 and the proximal phalanx 2 in the third embodiment.
- the initial postures of the index finger F2, the middle finger F3, the ring finger F4, and the little finger F5 are the extended and open posture, and by pulling the bent linear member W2 connected to each finger, each finger is displaced to the closed posture. Later, it is displaced to a bending posture.
- the direction of the closed posture of the index finger F2 and the middle finger F3 is clockwise in the drawing, and the direction of the closed posture of the ring finger F4 and the little finger F5 is counterclockwise in the drawing.
- the thumb F1 is connected to the support 100 via a hinge H. Note that the thumb F1 is rotatable with respect to the hinge H about the rotation axis A8.
- FIG. 13 shows the initial posture of the robot hand in this embodiment.
- the thumb F1, the index finger F2, the middle finger F3, the ring finger F4 and the little finger F5 are in the extended posture and the open posture.
- the extended linear member W1 connected to the thumb F1 and the bent linear member W2 connected to the thumb F1, index finger F2, middle finger F3, ring finger F4 and little finger F5 are retracted. exert force.
- the metacarpal bone 1 of the thumb F1 rotates clockwise about the rotation axis A6 with respect to the supporting bone 7, and the thumb F1 is displaced to the closed posture.
- the metacarpal bones 1 of the index finger F2 and the middle finger F3 rotate clockwise around the respective rotation axes A0 with respect to the support member 100, and the metacarpal bones 1 of the ring finger F4 and the little finger F5 rotate on the support member 100.
- they are rotated counterclockwise in the figure about the rotation axis A0, and the thumb F1, index finger F2, middle finger F3, and ring finger F4 are displaced to the closed posture.
- the robot hand in this state is shown in FIG.
- FIG. 15 shows the robot hand in this state.
- the thumb F1 rotates clockwise about the rotation axis A6 while maintaining the bent posture, and enters the closed posture. Displace.
- the thumb moves in this way, so when shaking hands with the robot hand of the present embodiment, it is possible to feel more human-like.
- the MP joint 91 can be in any posture in the opening/closing direction.
- the PIP joint 92 and the DIP joint 93 can be bent while the MP joint 91 is in the extended posture.
- the coil spring is used as the elastic body, but other springs such as leaf springs or elastic bodies other than springs may be used.
- the springs 81, 84, 85 are provided above the finger F, but they may be provided below the finger F.
- the spring 82 is provided on the side surface of the finger F on the opening/closing direction initial posture side, but may be provided on the side surface of the finger F on the opening/closing direction rotation posture side.
- the springs 82 and 83 are provided on the opening/closing direction initial attitude side and the opening/closing direction rotation attitude side with respect to the rotation axis A2, but these may be exchanged.
- the present invention can be applied to movable structures of robot joints, including joints at the base of fingers of robot hands.
- a movable structure By applying such a movable structure to the joints at the base of the fingers of the robot, it is possible to move from a clenched state (Goo shape) to an open state (Pa shape) or vice versa with a simple structure. be able to.
- Such robotic hands can also be used, for example, in remote communication systems.
- a robot hand having a movable joint structure according to the present invention and a monitor are installed at a point 1 where a user 1 is, and a hand movement such as a data glove is installed at a point 2 where a user 2 is. Install sensitive sensors and cameras.
- the image captured by the camera at the point 2 is displayed on the monitor at the point 1, and the user 1 can see the user 2 visually.
- a sensor senses the user's hand gripping motion
- the information is reflected in the motion of the robot hand at point 1, and the robot hand bends the joints of each finger F so as to grip the hand of user 1.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Prostheses (AREA)
Abstract
Description
本発明は、ロボットの指等の関節、特に、2軸回りの回動が可能な関節の可動構造およびその関節の可動構造を備えたロボットハンドに関する。 The present invention relates to a joint such as a finger of a robot, in particular, a movable structure for a joint capable of rotating about two axes, and a robot hand equipped with a movable structure for the joint.
多関節指を備えたマニピュレータやロボットハンド等(以下、ロボットハンドと総称する)と呼ばれる機器が開発され、製造現場等で使用されている。特に、人間の手を模したロボットハンドは、義手への使用や、近年では遠隔コミュニケーションツールとしての使用も提案されている。 Equipment called manipulators and robot hands with articulated fingers (hereinafter collectively referred to as robot hands) have been developed and used at manufacturing sites. In particular, robot hands imitating human hands have been proposed for use in artificial hands and, in recent years, as remote communication tools.
人間の手は、各々の指の屈曲/伸展動作だけでなく、指の開閉(指どうしの離間/近接)をも行うことができるため、人間の手を模したロボットハンドを上述のような用途に適用する場合にはこのような動きが必要となる。例えば、特許文献1の人型ロボットハンドでは、中手節に2つの1自由度を有するジョイントを直交するように配置し、それぞれのジョイントを異なる動力により作動させ、中手節の屈曲/伸展動作と開閉動作とを可能としている。
Since the human hand can not only flex and extend each finger, but also open and close the fingers (separate/approach the fingers), a robot hand that mimics the human hand can be used for the above-mentioned applications. Such a movement is necessary when applying to For example, in the humanoid robot hand of
また、特許文献2の5指型ハンド装置では、MP関節を2軸回りの回動を可能とし、それぞれに対して個別の流体圧シリンダを接続し、それぞれの流体圧を制御することによりMP関節の屈曲/伸展動作と開閉動作とを可能としている。
In addition, in the five-finger type hand device of
上述の特許文献1、2の技術では、関節を2軸回りに自由に回動させることができる。しかしながら、いずれも各々の回動軸周りの回動を個別に制御しているため、構造が複雑化し、装置が大型化するおそれがある。なお、いずれも装置の小型化を目的としているが、使用用途によっては十分な小型化を図れないおそれがある。
With the techniques of
本発明は上記課題に鑑みてなされたものであり、その目的は、簡易な構成で、2軸周りの回動を制御することができるロボット関節の可動構造およびその関節の可動構造を用いたロボットハンドを提供することにある。 SUMMARY OF THE INVENTION The present invention has been made in view of the above problems, and an object of the present invention is to provide a movable structure of a robot joint capable of controlling rotation about two axes with a simple configuration, and a robot using the movable structure of the joint. It is to provide a hand.
上記課題を解決するために、本発明に係る、第1部材と第2部材とを備えた関節の可動構造は、前記第2部材が第1回動軸周りに回動することにより屈曲姿勢と伸展姿勢との間の姿勢に変位可能であるとともに、前記第2部材が前記第1回動軸に交差する方向の第2回動軸周りに回動することにより閉姿勢と開姿勢との間の姿勢に変位可能であり、前記屈曲姿勢と前記伸展姿勢との一方を屈伸方向初期姿勢とし、他方を屈伸方向回動姿勢とするとともに、前記閉姿勢と前記開姿勢との一方を開閉方向初期姿勢とし、他方を開閉方向回動姿勢とし、前記第1部材と前記第2部材とにわたって設けられ、前記関節に前記屈伸方向初期姿勢側への力である屈伸方向力を作用させる第1弾性体と、前記第1部材と前記第2部材とにわたって設けられ、前記関節に前記開閉方向初期姿勢側への力である開閉方向力を作用させる第2弾性体と、前記第1部材側への引退力を作用させることにより、前記関節に前記屈伸方向回動姿勢側への力を作用させる屈伸方向力作用線状部材と、前記屈伸方向力作用線状部材に対する前記引退力を、前記関節を前記開閉方向回動姿勢に変位させる力に変換する力変換部材と、を備えている。 In order to solve the above problems, a joint movable structure including a first member and a second member according to the present invention is configured such that the second member rotates about a first rotation axis to assume a bent posture. It is displaceable to a position between the extended position and the closed position and the open position by rotating the second member about a second rotating shaft in a direction intersecting the first rotating shaft. One of the bending and stretching postures is the initial posture in the bending and stretching direction, the other is the rotating posture in the bending and stretching direction, and one of the closed posture and the open posture is the initial posture in the opening and closing direction. and the other is in an opening/closing direction rotation posture, and the first elastic body is provided across the first member and the second member to apply a bending and stretching direction force, which is a force toward the bending and stretching direction initial posture side, to the joint. and a second elastic body provided across the first member and the second member for applying an opening/closing direction force, which is a force toward the opening/closing direction initial posture side, to the joint, and a retraction toward the first member. a bending and stretching direction force acting linear member that acts on the joint to apply a force to the bending and stretching direction rotational posture side by applying a force to the joint; and a force conversion member that converts the force into a force for displacing it to the opening/closing direction rotational posture.
この構成では、関節には屈伸方向力と開閉方向力とが作用しているため、外力が作用していない状態の関節は屈伸方向初期姿勢かつ開閉方向初期姿勢となっている。このような関節に対して、屈伸方向力作用線状部材によって力を作用させると屈伸方向初期姿勢から屈伸方向回動姿勢に変位させることができる。また、屈伸方向力作用線状部材の引退力は力変換部材によって関節を開閉方向回動姿勢に変位させる力に変換されるため、関節は開閉方向初期姿勢から開閉方向回動姿勢に変位する。すなわち、この構成では、屈伸方向力作用線状部材による引退力で、第1回動軸回りの姿勢の変位と、第2回動軸周りの姿勢の変位と、を行うことができる。 In this configuration, since the bending and stretching direction force and the opening and closing direction force act on the joint, the joint in a state where no external force acts is in the initial posture in the bending and stretching direction and the initial posture in the opening and closing direction. When force is applied to such a joint by a bending-stretching direction force application linear member, it is possible to displace the joint from the bending-stretching direction initial posture to the bending-stretching direction rotational posture. In addition, since the retracting force of the bending and stretching direction force acting linear member is converted by the force conversion member into a force that displaces the joint to the opening/closing direction rotation posture, the joint is displaced from the opening/closing direction initial posture to the opening/closing direction rotation posture. That is, in this configuration, the retracting force of the bending and stretching direction force acting linear member can be used to displace the posture about the first rotation axis and to displace the posture about the second rotation axis.
本発明に係る関節の可動構造の好適な実施形態の一つでは、前記屈伸方向初期姿勢は前記伸展姿勢であり、前記屈伸方向回動姿勢は前記屈曲姿勢であり、前記開閉方向初期姿勢は前記閉姿勢であり、前記開閉方向回動姿勢は前記開姿勢であり、前記屈伸方向力作用線状部材は、前記関節に前記伸展姿勢側への力を作用させる伸展線状部材であり、前記第1部材側への引退力を作用させることにより、前記関節に前記屈曲姿勢側への力を生じさせる屈曲線状部材を備えている。 In one preferred embodiment of the joint movable structure according to the present invention, the initial posture in the bending and stretching direction is the stretching posture, the rotating posture in the bending and stretching direction is the bending posture, and the initial posture in the opening and closing direction is the posture. the opening and closing direction rotational posture is the open posture; the bending and stretching direction force application linear member is an extension linear member that applies a force to the joint in the extension posture side; A bending linear member is provided that causes the joint to generate a force toward the bending posture side by applying a withdrawal force toward the first member side.
この構成では、関節には第1弾性体による伸展方向力(伸展姿勢側への力)と第2弾性体による閉方向力(閉姿勢側への力)とが作用しているため、外力が作用していない状態の関節は伸展姿勢かつ閉姿勢となっている。このような関節に対して、屈曲線状部材によって屈曲力を作用させて屈曲姿勢とした状態から、伸展線状部材によって伸展姿勢に変位させることができる。さらに伸展線状部材に引退力を与えると、その引退力は力変換部材によって開方向力(開姿勢側への力)に変換される。これにより、関節は開姿勢(開閉方向回動姿勢)に変位することができる。このように、この構成では、屈曲線状部材の引退力によって屈曲姿勢かつ閉姿勢となった関節を、伸展線状部材による引退力のみで、伸展姿勢かつ開姿勢に変位させることができる。 In this configuration, since the extension direction force (force toward the extension posture side) by the first elastic body and the closing direction force (force toward the closed posture side) by the second elastic body act on the joint, external force is applied to the joint. Inactive joints are in an extended and closed position. Such a joint can be displaced from a state in which a bending force is applied by a bending linear member to a bent posture to an extended posture by an extension linear member. Further, when a retracting force is applied to the stretchable member, the retracting force is converted into an opening direction force (force toward the open posture side) by the force converting member. As a result, the joint can be displaced to the open posture (rotating posture in the opening/closing direction). In this way, with this configuration, the joint, which is in the bent and closed posture due to the retracting force of the bending linear member, can be displaced to the extended and open posture only by the retracting force of the extending linear member.
本発明に係る関節の可動構造の好適な実施形態の一つでは、前記屈伸方向初期姿勢は前記屈曲姿勢であり、前記屈伸方向回動姿勢は前記伸展姿勢であり、前記開閉方向初期姿勢は前記閉姿勢であり、前記開閉方向回動姿勢は前記開姿勢であり、前記屈伸方向力作用線状部材は、前記関節に前記伸展姿勢側への力を作用させる伸展線状部材であり、前記第1弾性体の前記屈伸方向力は、前記第2弾性体の開閉方向力よりも小さい。 In one preferred embodiment of the joint movable structure according to the present invention, the initial posture in the bending and stretching direction is the posture in which the bending and stretching directions are rotated, and the initial posture in the opening and closing direction is the posture in which the bending and stretching directions are rotated. the opening and closing direction rotational posture is the open posture; the bending and stretching direction force application linear member is an extension linear member that applies a force to the joint in the extension posture side; The force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
この構成では、関節には第1弾性体による屈曲方向力(屈曲姿勢側への力)と第2弾性体による閉方向力(閉姿勢側への力)とが作用しているため、外力が作用していない状態の関節は屈曲姿勢かつ閉姿勢となっている。このような関節に対して、伸展線状部材に与えられた引退力は伸展方向力(伸展姿勢側への力)となり、関節を伸展姿勢(屈伸方向回動姿勢)に変位させることができる。さらに伸展線状部材に引退力を与えると、その引退力は力変換部材によって開方向力(開姿勢側への力)に変換される。これにより、関節は開姿勢(開閉方向回動姿勢)に変位することができる。さらに、第1弾性体の屈伸方向力が第2弾性体の開閉方向力よりも小さくなっているため、関節が、伸展姿勢に変位を開始した後に、開姿勢に変位させることができる。このように、この構成では、伸展線状部材による引退力のみで、第1回動軸回りの姿勢の変位と、第2回動軸周りの姿勢の変位と、を行うことができ、さらには、その変位を開始する順序をも制御することができる。 In this configuration, since the bending direction force (force toward the bent posture side) and the closing direction force (force toward the closed posture side) by the second elastic body act on the joint, the external force is applied to the joint. Inactive joints are in a flexed and closed position. With respect to such a joint, the retraction force applied to the extension wire-shaped member becomes an extension direction force (force toward the extension posture side), and the joint can be displaced to the extension posture (bending and stretching direction rotation posture). Further, when a retracting force is applied to the stretchable member, the retracting force is converted into an opening direction force (force toward the open posture side) by the force conversion member. As a result, the joint can be displaced to the open posture (rotating posture in the opening/closing direction). Furthermore, since the bending and stretching direction force of the first elastic body is smaller than the opening and closing direction force of the second elastic body, the joint can be displaced to the open posture after starting to be displaced to the extended posture. Thus, with this configuration, it is possible to change the posture about the first rotation axis and the posture about the second rotation axis only by the retraction force of the stretchable member, and furthermore, , the order in which they start their displacement can also be controlled.
本発明に係る関節の可動構造の好適な実施形態の一つでは、前記屈伸方向初期姿勢は前記伸展姿勢であり、前記屈伸方向回動姿勢は前記屈曲姿勢であり、前記開閉方向初期姿勢は前記開姿勢であり、前記開閉方向回動姿勢は前記閉姿勢であり、前記屈伸方向力作用線状部材は、前記関節に前記屈曲姿勢側への力を作用させる屈曲線状部材であり、前記第2弾性体の前記開閉方向力は、前記第1弾性体の前記屈伸方向力よりも小さい。 In one preferred embodiment of the joint movable structure according to the present invention, the initial posture in the bending and stretching direction is the stretching posture, the rotating posture in the bending and stretching direction is the bending posture, and the initial posture in the opening and closing direction is the posture. the opening and closing direction rotation posture is the closed posture; the bending and stretching direction force applying linear member is a bending linear member that applies a force to the joint in the bending posture side; The force in the opening/closing direction of the second elastic body is smaller than the force in the bending/stretching direction of the first elastic body.
この構成では、関節には第1弾性体による伸展方向力(伸展姿勢側への力)と第2弾性体による開方向力(開姿勢側への力)とが作用しているため、外力が作用していない状態の関節は伸展姿勢かつ開姿勢となっている。このような関節に対して、屈曲線状部材に引退力を与えると、その引退力は力変換部材によって閉方向力(閉姿勢側への力)に変換される。これにより、関節は閉姿勢(開閉方向回動姿勢)に変位することができる。また、屈曲線状部材に与えられた引退力は屈曲方向力(屈曲姿勢側への力)となり、関節を屈曲姿勢(屈伸方向回動姿勢)に変位させることができる。さらに、第2弾性体の開閉方向力は、第1弾性体の屈伸方向力よりも小さくなっているため、関節が、閉姿勢に変位を開始した後に、屈曲姿勢に変位させることができる。このように、この構成では、屈曲線状部材による引退力のみで、第1回動軸回りの姿勢の変位と、第2回動軸周りの姿勢の変位と、を行うことができ、さらには、その変位を開始する順序をも制御することができる。 In this configuration, since the extension direction force (force toward the extension posture side) by the first elastic body and the opening direction force (force toward the open posture side) by the second elastic body act on the joint, external force is applied to the joint. Inactive joints are in an extended and open position. When a retraction force is applied to the bent linear member for such a joint, the retraction force is converted into a closing direction force (a force toward the closed posture side) by the force conversion member. As a result, the joint can be displaced to the closed posture (rotating posture in the opening/closing direction). Further, the retracting force applied to the bent linear member becomes a force in the bending direction (force toward the bending posture), and the joint can be displaced to the bending posture (rotating posture in the bending and stretching direction). Furthermore, since the opening/closing direction force of the second elastic body is smaller than the bending/stretching direction force of the first elastic body, the joint can be displaced to the bent posture after starting to be displaced to the closed posture. Thus, with this configuration, it is possible to change the posture about the first rotation axis and the posture about the second rotation axis only by the retraction force of the bent linear member. , the order in which they start their displacement can also be controlled.
本発明に係る関節の可動構造の好適な実施形態の一つでは、前記屈伸方向初期姿勢は前記伸展姿勢であり、前記屈伸方向回動姿勢は前記屈曲姿勢であり、前記開閉方向初期姿勢は前記開姿勢であり、前記開閉方向回動姿勢は前記閉姿勢であり、前記屈伸方向力作用線状部材は、前記関節に前記伸展姿勢側への力を作用させる伸展線状部材であり、前記第1部材側への引退力を作用させることにより、前記関節に前記屈曲姿勢側への力を生じさせる屈曲線状部材を備え、前記第1弾性体の前記屈伸方向力は、前記第2弾性体の開閉方向力よりも小さい。 In one preferred embodiment of the joint movable structure according to the present invention, the initial posture in the bending and stretching direction is the stretching posture, the rotating posture in the bending and stretching direction is the bending posture, and the initial posture in the opening and closing direction is the posture. The open position is the open position, the opening/closing direction rotation position is the closed position, the bending/stretching direction force applying linear member is an expanding linear member that applies a force to the joint in the extending position side, and the second A bending linear member that exerts a force toward the bending posture side on the joint by applying a withdrawal force toward the first member side, wherein the bending and stretching direction force of the first elastic body is applied to the second elastic body. is smaller than the opening and closing direction force of
この構成では、関節には第1弾性体による伸展方向力(伸展姿勢側への力)と第2弾性体による開方向力(開姿勢側への力)とが作用しているため、外力が作用していない状態の関節は伸展姿勢かつ開姿勢となっている。このような関節に対して、伸展線状部材に引退力を与えると、その引退力は力変換部材によって閉方向力(閉姿勢側への力)に変換される。これにより、関節は閉姿勢(開閉方向回動姿勢)に変位することができる。関節が屈曲姿勢かつ閉姿勢にある状態から伸展姿勢かつ開姿勢に変位させる際には、第1弾性体の屈伸方向力は、第2弾性体の開閉方向力よりも小さくなっているため、開姿勢に変位を開始した後に、伸展姿勢に変位させることができる。このように、この構成では、伸展線状部材による引退力のみで、第1回動軸回りの姿勢の変位と、第2回動軸周りの姿勢の変位と、を行うことができ、さらには、その変位を開始する順序をも制御することができる。 In this configuration, since the extension direction force (force toward the extension posture side) by the first elastic body and the opening direction force (force toward the open posture side) by the second elastic body act on the joint, external force is applied to the joint. Inactive joints are in an extended and open position. When a retraction force is applied to such a joint to the stretchable member, the retraction force is converted into a closing direction force (toward the closed posture side) by the force conversion member. As a result, the joint can be displaced to the closed posture (rotating posture in the opening/closing direction). When the joint is displaced from the bent and closed posture to the extended and opened posture, the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body. After starting the displacement to the posture, it can be displaced to the extension posture. Thus, with this configuration, it is possible to change the posture about the first rotation axis and the posture about the second rotation axis only by the retraction force of the stretchable member, and furthermore, , the order in which they start their displacement can also be controlled.
本発明に係る関節の可動構造の好適な実施形態の一つでは、前記屈伸方向初期姿勢は前記伸展姿勢であり、前記屈伸方向回動姿勢は前記屈曲姿勢であり、前記開閉方向初期姿勢は前記開姿勢であり、前記開閉方向回動姿勢は前記閉姿勢であり、前記屈伸方向力作用線状部材は、前記関節に前記屈曲姿勢側への力を作用させる屈曲線状部材であり、記第1弾性体の前記屈伸方向力は、前記第2弾性体の開閉方向力よりも小さい。 In one preferred embodiment of the joint movable structure according to the present invention, the initial posture in the bending and stretching direction is the stretching posture, the rotating posture in the bending and stretching direction is the bending posture, and the initial posture in the opening and closing direction is the posture. The open position is the open position, the opening/closing direction rotation position is the closed position, the bending/stretching direction force application linear member is a bending linear member that applies a force to the joint in the bending position side, and The force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
この構成では、関節には第1弾性体による伸展方向力(伸展姿勢側への力)と第2弾性体による開方向力(開姿勢側への力)とが作用しているため、外力が作用していない状態の関節は伸展姿勢かつ開姿勢となっている。このような関節に対して、屈曲線状部材に引退力を与えると、関節を屈曲姿勢(屈伸方向回動姿勢)に変位させることができる。また、その引退力は力変換部材によって閉方向力(閉姿勢側への力)に変換される。これにより、関節は閉姿勢(開閉方向回動姿勢)に変位することができる。さらに、第1弾性体の屈伸方向力は、第2弾性体の開閉方向力よりも小さくなっているため、関節が、屈曲姿勢に変位を開始した後に、閉姿勢に変位させることができる。このように、この構成では、屈曲線状部材による引退力のみで、第1回動軸回りの姿勢の変位と、第2回動軸周りの姿勢の変位と、を行うことができ、さらには、その変位を開始する順序をも制御することができる。 In this configuration, since the extension direction force (force toward the extension posture side) by the first elastic body and the opening direction force (force toward the open posture side) by the second elastic body act on the joint, external force is applied to the joint. Inactive joints are in an extended and open position. When a retraction force is applied to such a joint to the bending linear member, the joint can be displaced to a bending posture (rotating posture in the bending and stretching directions). Further, the retracting force is converted into a closing direction force (a force toward the closed posture side) by a force converting member. As a result, the joint can be displaced to the closed posture (rotating posture in the opening/closing direction). Furthermore, since the bending and stretching direction force of the first elastic body is smaller than the opening and closing direction force of the second elastic body, the joint can be displaced to the closed posture after starting to be displaced to the bent posture. Thus, with this configuration, it is possible to change the posture about the first rotation axis and the posture about the second rotation axis only by the retraction force of the bent linear member. , the order in which they start their displacement can also be controlled.
本発明に係る関節の可動構造の好適な実施形態の一つでは、前記力変換部材は、前記第2部材の前記第1部材側端部に設けられ、前記第2回動軸回りに前記第2部材と略一体的に回動可能であり、前記屈伸方向力作用線状部材の引退力が作用する作用点を備え、前記作用点は、前記第2回動軸よりも開閉方向回動姿勢側に位置している。 In one of the preferred embodiments of the joint movable structure according to the present invention, the force conversion member is provided at the end of the second member on the first member side, and rotates around the second rotation axis. It is rotatable substantially integrally with the two members, and has an action point on which the retracting force of the bending and stretching direction force action linear member acts, and the action point is in the opening/closing direction rotational posture relative to the second pivot shaft. located on the side.
この構成では、屈伸方向力作用線状部材の引退力が作用する作用点の位置を第2回動軸よりも開閉方向回動姿勢側に変位させるという簡易な構成で、開閉姿勢変位力作用線状部材の引退力を開閉方向回動姿勢への回動力に変換することができる。 In this configuration, the position of the action point of the bending and stretching direction force action line member on which the withdrawal force acts is displaced toward the opening and closing direction rotation posture side of the second rotation shaft. The retracting force of the shaped member can be converted into a turning force to the opening/closing direction turning posture.
本発明に係る関節の可動構造の好適な実施形態の一つでは、前記力変換部材は、前記屈伸方向力作用線状部材を案内するガイド面を備え、前記ガイド面は、前記第1部材側ほど開閉方向初期姿勢側に傾斜し、前記作用点は前記ガイド面の前記第2部材側の端部である。 In one of the preferred embodiments of the joint movable structure according to the present invention, the force conversion member includes a guide surface that guides the bending and stretching direction force acting linear member, and the guide surface is located on the first member side. The point of action is the end of the guide surface on the side of the second member.
この構成では、ガイド面の前端部(作用点)で屈曲した屈伸方向力作用線状部材に対して引退力を加えた際に、開閉姿勢変位力作用線状部材が直線状に変形しようとする力を開閉方向回動姿勢への回動力に変換することができる。 In this configuration, when a retracting force is applied to the bending and stretching direction force acting linear member bent at the front end (action point) of the guide surface, the opening/closing position displacement force acting linear member tends to deform linearly. The force can be converted into a turning force to the opening/closing direction turning posture.
さらに、本発明は上述の関節の可動構造を備えたロボットハンドをも権利対象としており、そのようなロボットハンドは、親指構造体と、少なくとも1つの指構造体と、を備えたロボットハンドであって、前記親指構造体は、請求項5または6記載の関節の可動構造を備え、前記関節はCM関節であり、前記第2部材は中手骨である。
Furthermore, the present invention also covers a robot hand having the above-described joint movable structure, and such a robot hand is a robot hand having a thumb structure and at least one finger structure. Further, the thumb structure has the joint movable structure according to
この構成のロボットハンドでは、親指構造体のCM関節に請求項5の関節の可動構造を用いた場合には、伸展姿勢かつ開姿勢にある親指構造体の伸展線状部材に対して引退力を作用させると、親指構造体は閉姿勢となる。これにより、このロボットハンドを握手させる際に相手の手の受け入れる空間を大きくすることができる。また、親指構造体のCM関節に請求項6の関節の可動構造を用いた場合には、屈曲線状部材を引くと、親指構造体のCM関節が屈曲姿勢に変位を開始した後に閉姿勢に変位する。このようなCM関節の動きは握手をした際の動作に近似しているため、この構成のロボットハンドを用いて人間と握手した際に人間と握手したような感覚を与えることができる。
In the robot hand of this configuration, when the joint movable structure of
以下に図面を用いて、本発明に係る関節の可動構造を説明する。図1は、本発明に係る関節の可動構造を有するロボットハンドの親指以外の指、例えば、右手の人差し指の上方斜視図である。なお、本説明における上とは手の甲側を意味する。指Fは、中手骨1(本発明における第1部材の例),基節骨2(本発明における第2部材の例),中節骨3および末節骨4を備えている。中手骨1と基節骨2とは長手方向において隣接するように配置され、MP関節91(本発明における関節に相当)を形成するように接続されている。MP関節91では、基節骨2は中手骨1に対して回動軸A1(本発明における第1回動軸の例)と回動軸A2(本発明における第2回動軸の例)との2軸回りに回動が可能となっている。なお、本実施形態では、回動軸A1と回動軸A2とは直交している。また、基節骨2と中節骨3とはPIP関節92を形成するように接続され、中節骨3と末節骨4とはDIP関節93を形成するように接続されている。PIP関節92およびDIP関節93はそれぞれ回動軸A3および回動軸A4周りに回動が可能となっている。
The movable structure of the joint according to the present invention will be described below using the drawings. FIG. 1 is an upper perspective view of a finger other than the thumb of a robot hand having a joint movable structure according to the present invention, for example, a right index finger. In addition, the top in this description means the back side of the hand. A finger F includes a metacarpal bone 1 (an example of the first member in the present invention), a proximal phalanx 2 (an example of the second member in the present invention), a
この指Fでは、MP関節91,PIP関節92,DIP関節93をそれぞれ回動軸A1,A3,A4周りに回動させることにより各関節を伸展姿勢と屈曲姿勢との間の姿勢に変位させることが可能となっている。また、MP関節91を回動軸A2周りに回動させることにより、MP関節91、すなわち、指Fを閉姿勢と開姿勢との間の姿勢に変位させることが可能となっている。ここで、開姿勢/閉姿勢とは他の指と離間/近接した姿勢である。 In this finger F, the MP joint 91, the PIP joint 92, and the DIP joint 93 are rotated around the rotation axes A1, A3, and A4, respectively, thereby displacing each joint to a posture between an extended posture and a bent posture. is possible. Further, by rotating the MP joint 91 around the rotation axis A2, the MP joint 91, that is, the finger F can be displaced to a posture between the closed posture and the open posture. Here, the open posture/closed posture are postures in which the finger is separated from/approached to other fingers.
以下の説明では、指Fに対して後述するバネ以外の外力が作用していない状態の姿勢を初期姿勢と称する。特に、バネ以外の外力が作用していないときのMP関節91,PIP関節92,DIP関節93の屈曲/伸展方向の姿勢(屈曲姿勢または伸展姿勢の一方)を屈伸方向初期姿勢、屈伸方向初期姿勢から変位した姿勢(屈曲姿勢または伸展姿勢の他方)を屈伸方向回動姿勢と称し、バネ以外の外力が作用していないときのMP関節91の開閉方向の姿勢(開姿勢または閉姿勢の一方)を開閉方向初期姿勢、開閉方向初期姿勢から変位した姿勢(開姿勢または閉姿勢の他方)を開閉方向回動姿勢と称する。図1に示した指F(MP関節91)は開閉方向初期姿勢となっており、基節骨2が回動軸A2周りに反時計回りに回動することによって開閉方向回動姿勢に変位する。また、指先側を前、反対側を後ろとして説明する。
In the following description, a posture in which no external force other than a spring, which will be described later, is acting on the finger F is called an initial posture. In particular, the flexion/extension direction postures (one of the flexion posture and the extension posture) of the MP joint 91, the PIP joint 92, and the DIP joint 93 when no external force other than the springs is acting are referred to as the initial posture in the flexion/extension direction, and the initial posture in the flexion/extension direction. The posture displaced from (the other of the bending posture or the stretching posture) is referred to as the bending and stretching direction rotation posture, and the posture of the MP joint 91 in the opening and closing direction when no external force other than the spring acts (one of the open posture or the closed posture) is referred to as an opening/closing direction initial attitude, and an attitude displaced from the opening/closing direction initial attitude (the other of the opening attitude and the closing attitude) is referred to as an opening/closing direction rotation attitude. The finger F (MP joint 91) shown in FIG. 1 is in the opening-closing direction initial posture, and is displaced to the opening-closing direction rotation posture by rotating the
例えば、このような構成の指Fを備えたロボットハンドにおいて、全ての指の全ての関節を屈曲姿勢とし、全ての指を閉姿勢とすれば「グー」の形状とすることができる。反対に、全ての指の全ての関節を伸展姿勢とし、全ての指を開姿勢とすれば「パー」の形状とすることができる。なお、以下の説明において、指Fが伸展姿勢または屈曲姿勢にあるとは、全ての関節が伸展姿勢または屈曲姿勢にあることを意味し、指Fが開姿勢または閉姿勢にあるとは、MP関節91が開姿勢または閉姿勢にあることを意味する。 For example, in a robot hand having fingers F with such a configuration, if all joints of all fingers are in a bent posture and all fingers are in a closed posture, a "goo" shape can be obtained. Conversely, if all joints of all fingers are in the extended posture and all fingers are in the open posture, a "par" shape can be obtained. Note that, in the following description, that the finger F is in the extended or flexed posture means that all joints are in the extended or flexed posture, and that the finger F is in the open or closed posture means that the MP It means that the joint 91 is in an open posture or a closed posture.
次に、図2の分解斜視図を用いて指Fを構成する各々の部材を説明する。中手骨1は2箇所の屈曲部を有する略直方体であり(図3参照)、開閉方向初期姿勢側(図面手前側)の側面の前端には溝11が形成されている。また、前端面から後端面にわたって後述する伸展線状部材W1,屈曲線状部材W2を挿通するための挿通路12,13が形成されている。また、図3に示すように、中手骨1の前端面は第1前端面1aと第2前端面1bとから構成されている。第1前端面1aは、その法線方向が指Fの軸心方向と同一である平面である。一方、第2前端面1bは、開閉方向回動姿勢側(図3における上側)の端部が後方に引退するように傾斜した平面となっている。
Next, each member constituting the finger F will be described using the exploded perspective view of FIG. The
基節骨2は、幅方向に少し厚みがある前後に細長い板状部材であり、前端には前方に突出する前部接続片21が形成されている。この前部接続片21には幅方向に貫通する接続孔21aが形成されており、図示しないベアリングがはめ込まれている。一方、基節骨2の後端には後方に突出する1対の後部接続片22,22が形成されている。後部接続片22にも幅方向に貫通する接続孔22aが形成されている。この1対の後部接続片22,22の間には空間Sが形成されている。また、基節骨2の上面前端には溝2aが形成されている。
The
中節骨3は、基節骨2よりも短い、幅方向に少し厚みがある板状部材であり、前端には前方に突出する接続片31が形成されている。この接続片31には幅方向に貫通する接続孔31aが形成されており、図示しないベアリングがはめ込まれている。一方、中節骨3の後端には、基節骨2の前部接続片21が嵌入する切り込み3dが形成されている。中節骨3のこの切り込み3dが形成された部分には、幅方向に貫通する接続孔3cが形成されている。また、中節骨3の上面の前端と後端とにはそれぞれ溝3a,3bが形成されている。
The
末節骨4は、中節骨3と同程度の長さの幅方向に少し厚みがある板状部材である。末節骨4の後端には、中節骨3の接続片31が嵌入する切り込み4cが形成されている。末節骨4のこの切り込み4cが形成された部分には、幅方向に貫通する接続孔4bが形成されている。また、末節骨4の上面の後端には溝4aが形成されている。
The
力変換部材5は、基節骨2の後端に形成された空間Sに嵌まり込む大きさの部材である。具体的には、図3および図4に示すように、基部53と、基部53から開閉方向初期姿勢側(図3における下側)に張り出した第1張り出し部51と、基部53から開閉方向回動姿勢側(図3における上側)に張り出した第2張り出し部52と、から構成されている。第1張り出し部51および第2張り出し部52の側面にはそれぞれ接続穴51a,52aが形成され、図示しないベアリングがはめ込まれている。また、第1張り出し部51の後端側側面には溝51bが形成されている。一方、基部53の上面には接続穴5aが形成されている。
The
基部53の上面は第1張り出し部51および第2張り出し部52の上面よりも高くなっており、突出部54を形成している。この突出部54の開閉方向回動姿勢側の側面は、中間位置から後方に向けて、開閉方向初期姿勢側に傾斜するガイド面54aが形成されている。このガイド面54aの機能については後述する。
The upper surface of the
力変換部材5の後端面は、開閉方向初期姿勢側に形成された第1後端面5bと、開閉方向回動姿勢側に形成された第2後端面5cとから構成されている。第1後端面5bは、指Fの軸心方向と一致する方向の法線を有する平面であり、MP関節91が開閉方向初期姿勢のときに中手骨1の第1前端面1aに正対している。一方、第2後端面5cは、開閉方向回動姿勢側の端部が前方に向けて引退する円弧状面となっている。
The rear end surface of the
接続部材6は、中手骨1と力変換部材5とを接続するための略板状部材であり、前端側には上下方向に貫通する接続孔6aが形成されており、図示しないベアリングがはめ込まれている。また、後端側には中手骨1にネジ止めするためのネジ孔6b,6cが形成されている。
The connecting
この指Fには、MP関節91,PIP関節92,DIP関節93が屈伸方向初期姿勢となるような力を作用させるバネと、MP関節91が開閉方向初期姿勢となるような力を作用させるバネと、が後述するように設けられている。なお、以下の説明では、関節が伸展姿勢、屈曲姿勢となるような力を伸展方向力、屈曲方向力と称し、MP関節91が閉姿勢、開姿勢となるような力を閉方向力、開方向力と称する。 A spring that applies a force to the finger F so that the MP joint 91, the PIP joint 92, and the DIP joint 93 assume the initial posture in the bending and stretching direction, and a spring that applies a force to cause the MP joint 91 to assume the initial posture in the opening/closing direction. and are provided as described later. In the following description, the forces that cause the joint to assume the extended and flexed postures are referred to as the extension direction force and the flexion direction force, and the forces that cause the MP joint 91 to assume the closed and open postures are the closed direction force and the open direction force. It is called directional force.
力変換部材5の第1張り出し部51と突出部54と基節骨2との間に形成された空間にはバネ81(本発明における第1弾性体の例)が設けられている。このバネ81はMP関節91が屈伸方向初期姿勢となる力を作用させている。一方、力変換部材5の第2張り出し部52と突出部54と基節骨2との間に形成された空間にはバネ83(本発明における第2弾性体の例)が設けられている。このバネ83はMP関節91が開閉方向初期姿勢となる力を作用させている。また、中手骨1の溝11と力変換部材5の溝51bとにわたってバネ82(本発明における第2弾性体の例)が設けられており、MP関節91が開閉方向初期姿勢となる力を作用させている。なお、本実施形態では、バネ82とバネ83とが、MP関節91が開閉方向初期姿勢となる力を作用させているが、どちらか一方のみとしても構わない。
A spring 81 (an example of the first elastic body in the present invention) is provided in the space formed between the first projecting
基節骨2の溝2aと中節骨3の溝3bとにわたってバネ84が設けられており、PIP関節92が屈伸方向初期姿勢となる力を作用させている。また、中節骨3の溝3aと末節骨4の溝4aとにわたってバネ85が設けられており、DIP関節93が屈伸方向初期姿勢となる力を作用させている。
A
本実施形態おける指Fは、伸展線状部材W1と屈曲線状部材W2とによって姿勢を変更することができる。伸展線状部材W1,屈曲線状部材W2としては、柔軟性と耐久性を有するものが望ましく、例えば、金属製ワイヤーやPEライン等を用いることができる。 The posture of the finger F in this embodiment can be changed by the stretched linear member W1 and the bent linear member W2. As the stretched wire member W1 and the bent wire member W2, those having flexibility and durability are desirable, and for example, metal wires, PE lines, and the like can be used.
図5に示すように、本実施形態における指Fは、このような伸展線状部材W1,屈曲線状部材W2を挿通するために、基節骨2、中節骨3はそれぞれの上部に上部挿通路2b,3e、下部に下部挿通路2c,3fが形成されている。これらの上部挿通路2b,3eには伸展線状部材W1が挿通されている。伸展線状部材W1の前端は末節骨4の溝4aの前側面に固定されている。また、伸展線状部材W1の後端は中手骨1の挿通路12を介して延出し、図示しないアクチュエータに接続されている。一方、下部挿通路2c,3fには屈曲線状部材W2が挿通されている。屈曲線状部材W2の前端は末節骨4の下部に形成された凹部の前方面に固定されている。また、屈曲線状部材W2の後端は中手骨1の挿通路13を介して延出し、図示しないアクチュエータに接続されている。伸展線状部材W1は、溝4a,3a,3b,2aを通る際は、バネ85,84の内部を通っている。このように伸展線状部材W1を配置することにより、関節位置における伸展線状部材W1の保護とたるみの防止を図ることができる。なお、図5では、中手骨1、接続部材6、バネ84,85は省略している。
As shown in FIG. 5, the finger F in this embodiment passes through the extension linear member W1 and the bending linear member W2, so that the
次に、図1,図2を参照してこのような部材を備えた指Fの組み立てについて説明する。ただし、組み立て順序は適宜変更可能である。先ず、接続孔4bと接続孔31aとの軸心とが一致するように、末節骨4の切り込み4cに中節骨3の接続片31を貫入させ、接続孔31aと接続孔4bとにわたって固定軸を挿通する。これにより、DIP関節93の屈曲姿勢/伸展姿勢間の変位が可能となる。
Next, assembly of the finger F provided with such members will be described with reference to FIGS. 1 and 2. FIG. However, the assembly order can be changed as appropriate. First, the
同様に、接続孔3cと接続孔21aとの軸心とが一致するように、中節骨3の切り込み3dに基節骨2の前部接続片21を貫入させ、接続孔21aと接続孔3cとにわたって固定軸を挿通する。これにより、PIP関節92の屈曲姿勢/伸展姿勢間の変位が可能となる。
Similarly, the
次に、バネ82の前端を力変換部材5の溝51bの前端近傍に固定する。そして、接続孔22aと接続穴51aおよび52aとの軸心とが一致するように、力変換部材5を基節骨2の後端の空間Sに貫入させ、接続穴51aと接続孔22a、および接続穴52aと接続孔22a、のそれぞれにわたって固定軸を挿入する。これにより、MP関節91の屈曲姿勢/伸展姿勢間の変位が可能となる。そして、上述したように、バネ81,83,84,85を固定する。
Next, the front end of the
さらに、接続部材6を、接続孔6aと接続穴5aとの軸心が一致するように、力変換部材5に被せ、接続孔6aから接続穴5aにわたって固定軸を挿入する。そして、固定部材6のネジ孔6b,6cにネジを挿通し、中手骨1にネジ止めする。さらに、バネ82の後部を溝11に嵌め込み、後端を固定する。これにより、MP関節91の閉姿勢/開姿勢間の変位が可能となる。
Further, the
図6,7用いて本実施例における指Fの動作を説明する。本実施例では、指Fは右手人差し指であり、指Fの初期姿勢は伸展姿勢かつ閉姿勢である。すなわち、開閉方向初期姿勢は閉姿勢であり、開閉方向回動姿勢は開姿勢である。このような初期姿勢であるため、本実施例では、バネ81,82,84,85は引張コイルバネであり、バネ83は圧縮コイルバネである。すなわち、バネ81,84,85はそれぞれMP関節91,PIP関節92,DIP関節93が伸展姿勢となるように伸展方向力を作用させ、バネ82,83はMP関節が閉姿勢となるように閉方向力を作用させている。
The motion of the finger F in this embodiment will be described with reference to FIGS. In this embodiment, the finger F is the index finger of the right hand, and the initial posture of the finger F is the extended posture and the closed posture. That is, the opening/closing direction initial posture is the closed posture, and the opening/closing direction rotational posture is the open posture. Because of this initial posture, springs 81, 82, 84, and 85 are extension coil springs and
本実施例では、バネ81,84,85の伸展方向力の大きさを異ならせている。具体的には、バネ85の伸展方向力が最も小さく、バネ81の伸展方向力が最も大きくなっている。なお、各バネの伸展方向力の大きさはバネ定数によって調整することができる。例えば、各々のバネの巻数を異ならせることにより、上述の伸展方向力の大きさの関係を設定することができる。
In this embodiment, the magnitudes of the forces in the direction of extension of the
このように構成され、伸展姿勢かつ閉姿勢にある指Fを、伸展姿勢かつ開姿勢(開閉方向回動姿勢)に変位させるためには、屈曲線状部材W2に引退力を作用させない状態で、伸展線状部材W1(本発明における屈伸方向力作用線状部材に相当)に引退力を作用させる。その際の動作を図6に示している。図6(a)および(b)はそれぞれ、伸展姿勢かつ閉姿勢にある指F、伸展姿勢かつ開姿勢にある指の平面図である。上述したように、指Fは右手人差し指であるため、右側にある中指から離間した姿勢、すなわち、基節骨2が中手骨1に対して図中反時計回りに回動した姿勢が開姿勢である。なお、この図ではバネおよび接続部材6は省略している。
In order to displace the finger F in the extended and closed posture to the extended and open posture (rotational posture in the opening/closing direction), the retracting force is not applied to the bent linear member W2. A retracting force is applied to the extension wire member W1 (corresponding to the bending and stretching direction force applying wire member in the present invention). The operation at that time is shown in FIG. 6A and 6B are plan views of the finger F in the extended and closed posture and the finger in the extended and open posture, respectively. As described above, since the finger F is the index finger of the right hand, the posture in which the finger F is separated from the middle finger on the right side, that is, the posture in which the
図6(a)に示すように、伸展線状部材W1は末節骨4から中節骨3および基節骨2を通って基節骨2の後端部の空間Sへと抜け出ている。図に示すように、伸展線状部材W1の空間Sへの抜け出し位置は、平面視における幅方向の中央ではなく、開姿勢側(開閉方向回動姿勢側、図面左方向)に変位した位置となっている。より具体的には、伸展線状部材W1は、回動軸A2から開姿勢側に変位した位置で空間Sへと導出された後、力変換部材5の突出部54の開姿勢側の側面に沿って後方に案内され、さらに、ガイド面54aに沿って後方かつ閉姿勢側に案内されて中手骨1の挿通路12に挿通されている。
As shown in FIG. 6( a ), the extension wire-like member W1 passes from the
図示しないアクチュエータを作動させてこのように配された伸展線状部材W1に引退力を作用させると、DIP関節93,PIP関節92,MP関節91には伸展方向力が作用するが、これらの関節は既に伸展姿勢にあるため、ほぼ姿勢の変更はなく、伸展姿勢は維持される。さらに伸展線状部材W1に引退力を作用させると、空間S内で屈曲していた伸展線状部材W1が直線状になろうとする。そのため、伸展線状部材W1に作用している引退力は、ガイド面54aの前端部54b(本発明における作用点の例)よりも前側に部分では、前端部54bを支点とする開姿勢側への回転力に変換される。この回転力は基節骨2に対して開方向力として伝達され、その開方向力がバネ82,83の閉方向力に打ち勝つと、基節骨2は中手骨1に対して回動軸A2を中心として図中反時計回りに回動し、MP関節91は開姿勢へと変位する(図6(b))。なお、力変換部材5は基節骨2とともに回動する。このとき、力変換部材5の第2後端面5cが円弧状に形成されているため、第2後端面5cが中手骨1の前端面に接触することによる力変換部材5の回動の阻害を回避することができる。そして、基節骨2の後端面が中手骨1の第2前端面1bに当接すると、基節骨2のさらなら回転が規制され、MP関節91は開姿勢となる。
When an actuator (not shown) is actuated to apply a retraction force to the extension wire member W1 arranged in this way, a force in the direction of extension acts on the DIP joint 93, the PIP joint 92, and the MP joint 91. Since the is already in an extended posture, there is almost no change in posture and the extended posture is maintained. Further, when a retracting force is applied to the stretchable member W1, the stretchable member W1 bent in the space S tries to straighten. Therefore, the retracting force acting on the stretchable member W1 moves toward the open position with the
一方、開姿勢にある指Fを閉姿勢に変位させるためには、伸展線状部材W1の引退力を緩めればよい。これにより、MP関節91にはバネ82,83による閉方向力が作用し、閉姿勢へと変位する。
On the other hand, in order to displace the finger F from the open posture to the closed posture, the retraction force of the stretchable member W1 should be relaxed. As a result, the force in the closing direction is applied to the MP joint 91 by the
また、本実施例における指Fを屈曲姿勢(屈伸方向回動姿勢)に変位させる際の動作を図7に示している。なお、この図では、バネ,伸展線状部材W1,屈曲線状部材W2は省略している。指Fの関節を屈曲させる際には、伸展線状部材W1を緩めた状態で、図示しないアクチュエータを作動させて屈曲線状部材W2に引退力を作用させる。上述したように、バネ81,84,85の伸展方向力が異なっているため、関節が屈曲姿勢への変位を開始するタイミングをずらすことができる。具体的には、全ての関節が伸展姿勢となっている状態(図7(a))から、先ず、伸展方向力が最も小さいバネ85が配されているDIP関節93が屈曲し始め(図7(b))、さらに順次、PIP関節92(図7(c))、MP関節91が屈曲し始める(図7(d))。なお、指Fが屈曲する際には、バネ81,83の閉方向力によってMP関節91は閉姿勢を保っている。また、MP関節91が屈曲する際には、基節骨2は中手骨1に対して回動軸A1周りに回動するが、力変換部材5は回動軸A1周りには回動しない。
Also, FIG. 7 shows the operation of displacing the finger F to the bending posture (rotating posture in the bending and stretching direction) in this embodiment. In addition, in this figure, the spring, the stretched wire member W1, and the bent wire member W2 are omitted. When bending the joint of the finger F, the extension linear member W1 is loosened, and an actuator (not shown) is operated to apply a retraction force to the bending linear member W2. As described above, since the
全ての関節が屈曲姿勢にある状態から、全ての関節を伸展姿勢に変位させる際には、屈曲線状部材W2の引退力を緩めればよい。このとき、伸展線状部材W1に引退力を付与しなくとも、バネ81,84,85の伸展方向力によって各関節は伸展姿勢となるが、その後にMP関節91を開姿勢に変位させることを考慮して、伸展線状部材W1に引退力を付与しておくことが望ましい。なお、指Fが伸展姿勢に変位する際には、屈曲姿勢への変位とは反対に、MP関節91からPIP関節92、DIP関節93と順に伸展し始める(図7(d)→(c)→(b)→(a))。そして、全ての関節が伸展姿勢となった後に、さらにワイヤーW1に引退力を作用させると、MP関節91は上述したように開姿勢となる。
When displacing all the joints from the bent posture to the extended posture, the retraction force of the bent linear member W2 should be relaxed. At this time, even if the retraction force is not applied to the extension wire member W1, each joint will be in the extension posture due to the extension direction force of the
このように、本実施例における指Fは、屈曲姿勢かつ閉姿勢から伸展姿勢かつ開姿勢に移行する際にはMP関節91,PIP関節92,DIP関節93の順に伸展が開始される。そして、全ての関節が伸展姿勢に変位した後にMP関節91が開姿勢へと移行する。また、指Fが伸展姿勢かつ開姿勢から屈曲姿勢かつ閉姿勢に移行する際には、MP関節91が閉姿勢に移行した後に、DIP関節93,PIP関節92,MP関節91の順に屈曲を開始させることができる。すなわち、本実施例における指Fの各関節は、人間の指の関節の動作順と同じとすることができる。 Thus, the finger F in this embodiment starts to extend in the order of the MP joint 91, the PIP joint 92, and the DIP joint 93 when shifting from the bent and closed posture to the extended and open posture. Then, after all the joints are displaced to the extended posture, the MP joint 91 shifts to the open posture. Further, when the finger F shifts from the extended and open posture to the bent and closed posture, the DIP joint 93, the PIP joint 92, and the MP joint 91 start bending in this order after the MP joint 91 shifts to the closed posture. can be made That is, the joints of the finger F in this embodiment can be made to operate in the same order as the human finger joints.
本実施例では、指Fのこのような動作は伸展線状部材W1と屈曲線状部材W2とにより制御しているが、例えば、伸展線状部材W1と屈曲線状部材W2とを一つのロータリー型のアクチュエータに接続し、第1の方向に回転した際には伸展線状部材W1に引退力が生じ、第1の方向の反対方向に回転したした際には屈曲線状部材W2に引退力が生じるようにしておけば、一つのアクチュエータで上述の動作を制御することができる。 In this embodiment, such motions of the finger F are controlled by the stretchable wire member W1 and the bent wire member W2. When connected to the actuator of the mold and rotated in the first direction, a withdrawal force is generated in the extension linear member W1, and when rotated in the opposite direction to the first direction, a withdrawal force is generated in the bending linear member W2. is generated, the above operation can be controlled by one actuator.
本実施例では、指Fの初期姿勢は屈曲姿勢かつ閉姿勢、いわゆる「グー」ある。すなわち、開閉方向初期姿勢は閉姿勢であり、開閉方向回動姿勢は開姿勢である。このような初期姿勢であるため、本実施例では、バネ81,83,84,85は圧縮コイルバネであり、バネ82は引張コイルバネである。すなわち、バネ81,84,85はそれぞれMP関節91,PIP関節92,DIP関節93が屈曲姿勢となるように屈曲方向力を作用させ、バネ82,83はMP関節が閉姿勢となるように閉方向力を作用させている。なお、本実施例でも屈曲線状部材W2を備えているが、補助的な役割であるため、屈曲線状部材W2を設けなくとも構わない。
In this embodiment, the initial posture of the finger F is a bent posture and a closed posture, so-called "goo". That is, the opening/closing direction initial posture is the closed posture, and the opening/closing direction rotational posture is the open posture. Because of this initial posture, springs 81, 83, 84, and 85 are compression coil springs and
本実施例における指Fも実施例1と同様に、MP関節91,PIP関節92,DIP関節93の伸展/屈曲を開始する順序を規定するために、バネ81,84,85の屈曲方向力の大きさを異ならせている。具体的には、バネ85の屈曲方向力が最も大きく、バネ81の屈曲方向力が最も小さくなるようそれぞれのバネのバネ定数が設定されている。また、本実施例では、バネ81の屈曲方向力の大きさとバネ82およびバネ83の閉方向力の大きさとの関係も規定されている。具体的には、バネ81の屈曲方向力よりもバネ82とバネ83との閉方向力の方が大きくなっている。さらには、バネ82とバネ83との閉方向力はバネ85の屈曲方向力よりも大きく設定されている。
As in the first embodiment, the fingers F in this embodiment also have the bending direction force of the
本実施例における指Fの動作を、図6,7を用いて説明する。先ず、上述したように、本実施例における指Fの初期姿勢は屈曲姿勢かつ閉姿勢である(図7(d))。この姿勢から、屈曲線状部材W2の引張力を緩めながら、伸展線状部材W1(本発明における屈伸方向力作用線状部材に相当)の引張力を強めてゆく。すると、バネ81,84,85,82のうちでバネ81の屈曲方向力が最も小さいため、最初にMP関節91が伸展を始める(図6(c))。そして、順次、屈曲方向力が小さいバネが設けられたPIP関節92,DIP関節93が伸展を始め、指Fは伸展姿勢(屈伸方向回動姿勢)となる(図7(b)→図7(a),図6(a))。そして、さらに伸展線状部材W1の引張力を強めると、バネ82およびバネ83の閉方向力に打ち勝ち、実施例1で説明した作用によって基節骨2が回動軸A2を中心として図中反時計回りに回動し、MP関節91、すなわち、指Fは開姿勢(開閉方向回動姿勢)となる(図6(b))。
The motion of the finger F in this embodiment will be explained using FIGS. First, as described above, the initial posture of the finger F in this embodiment is the bent posture and the closed posture (FIG. 7(d)). From this posture, the tensile force of the extension wire member W1 (corresponding to the bending and stretching direction force acting linear member in the present invention) is strengthened while loosening the tensile force of the bending wire member W2. Then, among the
また、指Fを伸展姿勢かつ開姿勢から初期姿勢である屈曲姿勢かつ閉姿勢に変位させる際には、伸展線状部材W1の引退力を緩め、屈曲線状部材W2に引退力を作用させる。これにより、上述とは反対の順序で各関節が閉姿勢および屈曲姿勢へと変位してゆく。なお、本実施例では、屈曲線状部材W2に引退力を作用させなくとも、各バネの作用によって指Fは初期姿勢へと変位する。 Further, when displacing the finger F from the extended and open posture to the initial posture of the bent and closed posture, the retracting force of the extending linear member W1 is relaxed and the retracting force is applied to the bent linear member W2. As a result, each joint is displaced to the closed posture and the bent posture in the order opposite to that described above. It should be noted that, in this embodiment, the finger F is displaced to the initial posture by the action of each spring without exerting a withdrawal force on the bent linear member W2.
このように、本実施例における指Fは、上述のようにバネの強さ(バネ定数)を設定することにより、実施例1と同様に各関節の回動順序を規定することができる。 In this way, by setting the strength of the spring (spring constant) as described above, the finger F in this embodiment can define the rotation order of each joint in the same manner as in the first embodiment.
本実施例では、指Fの初期姿勢は伸展姿勢かつ開姿勢、いわゆる「パー」である。すなわち、開閉方向初期姿勢は開姿勢であり、開閉方向回動姿勢は閉姿勢である。また、本実施例における指Fの構成は、中手骨1および力変換部材5の配置が実施例1,2とは異なっている。具体的には、図8の底面図に示すように、本実施例では、中手骨1および力変換部材5を、実施例1,2の配置とは上下が反転するように配置している。すなわち、本実施例ではガイド面54aが下面側に設けられている。さらに、ガイド面54aに案内されるのが屈曲線状部材W2である点においても実施例1,2とは異なっている。なお、このような配置変更に伴って接続部材6も下方側に設けても構わないが、その場合には接続部材6MP関節の屈曲を阻害しない形状とする必要がある。
In this embodiment, the initial posture of the finger F is an extended posture and an open posture, so-called "par". That is, the opening/closing direction initial posture is the open posture, and the opening/closing direction rotational posture is the closed posture. Further, the configuration of the finger F in this embodiment differs from that in the first and second embodiments in the arrangement of the
本実施例では、上述した構成および初期姿勢であるため、バネ82,84,85は引張コイルバネであり、バネ81,83は圧縮コイルバネである。すなわち、バネ81,84,85はそれぞれMP関節91,PIP関節92,DIP関節93が伸展姿勢となるように伸展方向力を作用させ、バネ82,83はMP関節が開姿勢となるように開方向力を作用させている。なお、本実施例でも伸展線状部材W1を備えているが、補助的な役割であるため、伸展線状部材W1を設けなくとも構わない。なお、本実施例では、バネ81が下面側に配置されているが、実施例1,2と同様に上面側に配置しても構わない。その場合、力変換部材5の上面側にバネ81を収容する空間が形成されるように形状を改変すればよい。この場合、バネ81は引張コイルバネとなる。
In this embodiment, the
図8に示すように、末節骨4の前端部近傍の下部に固定された屈曲線状部材W2(本発明における屈伸方向力作用線状部材に相当)は、末節骨4から中節骨3および基節骨2の下部を通って基節骨2の後端部の空間Sへと抜け出ている。図に示すように、屈曲線状部材W2の空間Sへの抜け出し位置は、底面視における幅方向の中央ではなく、閉姿勢側(開閉方向回動姿勢側、図面左方向)に変位した位置となっている。より具体的には、屈曲線状部材W2は、回動軸A2から閉姿勢側に変位した位置で空間Sへと導出された後、力変換部材5の突出部54の閉姿勢側の側面に沿って後方に案内され、さらに、ガイド面54aに沿って後方かつ開姿勢側に案内されて中手骨1の挿通路13に挿通されている。
As shown in FIG. 8, a bending linear member W2 (corresponding to a bending and stretching direction force application linear member in the present invention) fixed to the lower portion near the front end of the
本実施例においても各バネの力の大きさの関係が規定されている。具体的には、バネ81,84,85のうち、バネ85の伸展方向力が最も小さく、バネ81の伸展方向力が最も大きく設定されている。また、バネ81の伸展方向力の大きさよりも、バネ82とバネ83との開方向力の大きさの方が小さくく設定されている。また、バネ82とバネ83との開方向力の大きさは、バネ85の伸展方向力の大きさよりも小さく設定されている。
Also in this embodiment, the relationship between the magnitudes of the forces of the springs is defined. Specifically, among the
図7,8を用いて本実施例における指Fの動作を説明する。初期姿勢(図7(a),図8(a))から屈曲姿勢(屈伸方向回動姿勢)かつ閉姿勢(開閉方向回動姿勢)とする際には伸展線状部材W1を緩め、屈曲線状部材をW2に引退力を作用させてゆく。そうすると、MP関節91,PIP関節92,DIP関節93には屈曲方向への力が作用する。また、MP関節91には実施例1で説明したのと同様の作用により、閉方向への力が作用する。上述したように、バネ82とバネ83との閉方向力が最も小さいため、MP関節91,PIP関節92,DIP関節93の屈曲よりも先にMP関節91の閉姿勢への変位(回動)が始まる。このとき、基節骨2は力変換部材5とともに回動軸A2を中心として図中反時計周りに回動する。そして、基節骨2の第1後端面5bが中手骨1の第2前端面1bに当接すると、基節骨2のさらなら回転が規制され、MP関節91は閉姿勢となる(図8(b))。
The motion of the finger F in this embodiment will be described with reference to FIGS. When changing from the initial posture (Figs. 7(a) and 8(a)) to the bending posture (rotating posture in the bending and stretching direction) and the closed posture (rotating posture in the opening and closing direction), the stretchable member W1 is loosened and the bending line A retracting force is applied to W2 by the like member. Then, force acts on the MP joint 91, the PIP joint 92, and the DIP joint 93 in the bending direction. Further, a force in the closing direction acts on the MP joint 91 by the same action as described in the first embodiment. As described above, since the force in the closing direction of the
さらに、屈曲線状部材W2の引退力を強めてゆくと、実施例1と同様に、先ず、DIP関節93が屈曲し始め(図7(b))、さらに順次、PIP関節92(図7(c))、MP関節91が屈曲し始め(図7(d))、全ての関節が屈曲姿勢となる。 Further, when the retracting force of the bending linear member W2 is increased, the DIP joint 93 first begins to bend (FIG. 7(b)), and then the PIP joint 92 (FIG. 7 ( c)), the MP joint 91 begins to bend (FIG. 7(d)), and all the joints assume a bending posture.
指Fが屈曲かつ閉姿勢にある状態から屈曲線状部材W2の引退力を弱めながら、伸展線状部材W1の引退力を強めてゆくと、上述の動作とは反対に、MP関節91からPIP関節92、DIP関節93と順に伸展し始め(図7(d)→(c)→(b)→(a))、最後にMP関節91が開姿勢へと変位してゆく(図8(a))。なお、本実施例では、伸展線状部材W1に引退力を作用させなくとも、各バネの作用によって指Fは初期姿勢へと変位する。 When the retraction force of the extension linear member W1 is strengthened while weakening the retraction force of the bending linear member W2 from the state in which the finger F is in the bent and closed posture, the movement from the MP joint 91 to the PIP is performed opposite to the above operation. The joint 92 and the DIP joint 93 begin to extend in order (FIG. 7(d)→(c)→(b)→(a)), and finally the MP joint 91 is displaced to the open posture (FIG. 8(a) )). In this embodiment, the finger F is displaced to the initial posture by the action of each spring without exerting a withdrawal force on the stretchable member W1.
このように、本発明に係る関節の可動構造では、屈伸方向初期姿勢となるよう力を作用させる弾性体(バネ)の力の大きさと、開閉方向初期姿勢となるよう力を作用させる弾性体(バネ)の力の大きさとの関係を規定することにより、関節が屈伸方向回動姿勢に変位を開始するタイミングと開閉方向回動姿勢に変位を開始するタイミングとを制御することができる。また、上述したような力変換部材5を用いることにより、関節の2方向の回動を1本の線状部材(ワイヤー)で制御することができる。
As described above, in the movable structure of the joint according to the present invention, the magnitude of the force of the elastic body (spring) that exerts the force so as to assume the initial posture in the bending and stretching directions, and the elastic body (spring) that exerts the force so as to assume the initial posture in the opening/closing direction By defining the relationship between the force of the spring and the magnitude of the force, it is possible to control the timing at which the joint starts to be displaced to the bending and stretching direction rotational posture and the timing to start the joint to be displaced to the opening and closing direction rotational posture. Further, by using the
図9(a),(b)は、本発明に係る関節の可動構造を有するロボットハンドの右手の親指Fの上方斜視図および下方斜視図である。指Fは、支持骨7(本発明における第1部材の例、人間の手の大菱形骨に相当),中手骨1(本発明における第2部材の例),基節骨2および末節骨4を備えている。支持骨7と中手骨1とは長手方向において隣接するように配置され、CM関節94(本発明における関節に相当)を形成するように接続されている。CM関節94では、中手骨1は支持骨7に対して回動軸A5(本発明における第1回動軸の例)と回動軸A6(本発明における第2回動軸の例)との2軸回りの回動が可能となっている。なお、本実施例では、回動軸A5と回動軸A6とは直交している。また、中手骨1と基節骨2とはMP関節91を形成するように接続され、基節骨2と末節骨4とはIP関節95を形成するように接続されている。MP関節91およびIP関節95はそれぞれ回動軸A1および回動軸A7周りの回動が可能となっている。
9(a) and (b) are an upper perspective view and a lower perspective view of a right thumb F of a robot hand having a joint movable structure according to the present invention. The finger F includes a supporting bone 7 (an example of the first member in the present invention, corresponding to the great rhomboid bone of the human hand), a metacarpal bone 1 (an example of the second member in the present invention), a
支持骨7の側面(図中左側面)には、中手骨1の後端に力(開閉方向力)を作用させるバネ86が設けられている。また、支持骨7と中手骨1とにわたって上側および下側にバネ87Uおよびバネ87Lが設けられている。同様に、中手骨1と基節骨2とにわたって上側および下側にバネ88Uおよびバネ88Lが設けられ、基節骨2と末節骨4とにわたって上側および下側にバネ89Uおよびバネ89Lが設けられている。本実施例における指Fの初期姿勢は開姿勢および伸展姿勢である。すなわち、開閉方向初期姿勢は開姿勢であり、開閉方向回動姿勢は閉姿勢である。中手骨1が支持骨7に対して図9(a)の開姿勢から回動軸A6を中心として時計回りに回動した姿勢が閉姿勢(開閉方向回動姿勢)である。そのため、バネ86は中手骨1に対して開姿勢側への力を作用させる引張コイルばねである。また、CM関節94,MP関節91およびIP関節95には伸展方向力を作用させる必要があるため、バネ87U,88U,89Uは引張コイルバネ、バネ87L,88L,89Lは圧縮コイルバネである。なお、本実施例ではCM関節94,MP関節91およびIP関節95の上面および下面にバネを設けたが、上側または下側に伸展方向力を作用させるバネを設けても構わない。
A
図10は、CM関節94近傍の図9におけるX-X断面図である。本実施例では、支持骨7と中手骨1との間に力変換部材5が設けられている。本実施例における力変換部材5は、上述の実施例におけるものと若干形状は異なるが、後端面は同様に開閉方向初期姿勢側(図中下側)に形成された第1後端面5bと、開閉方向回動姿勢側(図中上側)に形成された第2後端面5cとから構成されている。また、上述の実施例におけるものと同様に、第1後端面5bは、指Fの軸心方向と一致する方向の法線を有する平面であり、第2後端面5cは、開閉方向回動姿勢側の端部が前方に向けて引退する円弧状面となっている。
FIG. 10 is a cross-sectional view taken along line XX in FIG. 9 near the CM joint 94. FIG. In this embodiment, a
この指Fが閉姿勢に変位、すなわち回動軸A6を中心として時計回りに回動した際には、力変換部材5の第2後端面5cが、支持骨7の第2前端面7bに当接し、それ以上の回動が規制される。なお、本実施例では、第2前端面7bは指Fの軸心方向と一致する方向の法線を有する平面であるが、上述の実施例における中手骨1の第2前端面1bと同様に、開閉方向回動姿勢側(図10における上側)の端部が後方に引退するように傾斜した平面としても構わない。
When the finger F is displaced to the closed posture, that is, rotated clockwise about the rotation axis A6, the second
図11は、図9におけるXI-XI断面図である。図に示すように、力変換部材5は、上述の実施例におけるものと同様に、その上側に突出部54が形成されており、突出部54の開閉方向回動姿勢側(閉姿勢側)の側面には、中間位置から後方に向けて、開閉方向初期姿勢側(開姿勢側)に傾斜するガイド面54aが形成されている。また、このガイド面54aの前端部54bが本発明における作用点として機能する点も上述の実施例におけるものと同様である。
FIG. 11 is a cross-sectional view taken along line XI-XI in FIG. As shown in the figure, the
図11に示すように、伸展線状部材W1(本発明における屈伸方向力作用線状部材に相当)は指Fの真ん中よりも上方に配置されており、支持骨7ではやや開姿勢側(図中左側)を通り、力変換部材5のガイド面54aの若干閉姿勢側(図中右側)を通って中手骨1,基節骨2,末節骨4のほぼ真ん中を通り、指先に固定されている。そのため、指Fが初期姿勢にある状態で伸展線状部材W1に引退力を作用させると、上述したように、伸展線状部材W1の屈曲部分が直線状になろうとする。このとき、伸展線状部材W1は力変換部材5のガイド面54aに当接し、引退力は回動軸A6を中心とする時計回りの回動力に変換される。これにより、中手骨1は回動軸A6を中心として時計回りに回動し、指Fは閉姿勢に変位する。
As shown in FIG. 11, the extension linear member W1 (corresponding to the bending and stretching direction force application linear member in the present invention) is arranged above the middle of the finger F, and the supporting
図12は、図9におけるXII-XII断面図である。図に示すように、屈曲線状部材W2は指Fの真ん中よりも下方に配置されており、支持骨7ではやや閉姿勢側(図中右側)から力変換部材5閉姿勢側(図中右側)を通っている。すなわち屈曲線状部材W2は回動軸A6よりも閉姿勢側を通っている。また、屈曲線状部材W2は中手骨1,基節骨2,末節骨4ではほぼ真ん中を通り、指先に固定されている。このように、屈曲線状部材W2が回動軸A6よりも閉姿勢側を通っているため、屈曲線状部材W2に引退力が作用すると、屈曲線状部材W2の屈曲部分が直線状になろうとする際に、回動軸A6を中心とする時計周りの回動力が生じる。これにより、中手骨1は回動軸A6を中心として時計回りに回動し、指Fは閉姿勢に変位する。
FIG. 12 is a cross-sectional view taken along line XII-XII in FIG. As shown in the figure, the bent linear member W2 is arranged below the middle of the finger F, and the
本実施例では屈曲線状部材W2は力変換部材5のガイド面54aには当接しないが、屈曲線状部材W2が当接するガイド面を設けても構わない。この場合、屈曲線状部材W2は本発明における屈伸方向力作用線状部材に相当する。この場合であっても、上述と同様の作用効果を奏する。
In this embodiment, the bent linear member W2 does not contact the
本実施例では、屈曲線状部材W2に引退力を作用させた際に、IP関節95の屈曲、MP関節91の屈曲、CM関節94の屈曲、CM関節94の閉姿勢への変位が順に生じるように各々のバネの強さを設定している。すなわち、屈曲線状部材W2に引退力を作用させると、指先側の関節から屈曲が開始され、その後、指Fは閉姿勢に変位する。 In this embodiment, when a withdrawal force is applied to the bending linear member W2, bending of the IP joint 95, bending of the MP joint 91, bending of the CM joint 94, and displacement of the CM joint 94 to the closed posture occur in order. The strength of each spring is set as follows. That is, when a retracting force is applied to the bending linear member W2, bending starts from the joint on the fingertip side, and then the finger F is displaced to the closed posture.
ここでは、上述した指F、特に、実施例4における指Fを用いたロボットハンドの実施例を示す。図13に示すように、ロボットハンドは、親指F1(本発明における親指構造体に相当)、人差し指F2,中指F3,薬指F4および小指F5(本発明における指構造体に相当)を備えている。親指F1は実施例4で示した指Fと同じである。一方、他の指は上述した実施例とは形状や構成が若干異なっているが、中手骨1,基節骨2,中節骨3および末節骨4を備え、MP関節91,PIP関節92およびDIP関節93が形成されている点は上述の実施例におけるものと同様である。なお、本実施例で示す図では基本的な構造のみを示し、上述の実施例で説明したバネ等は省略している。
Here, an example of a robot hand using the finger F described above, particularly the finger F in Example 4 is shown. As shown in FIG. 13, the robot hand has a thumb F1 (corresponding to the thumb structure of the present invention), index finger F2, middle finger F3, ring finger F4 and little finger F5 (corresponding to the finger structure of the present invention). The thumb F1 is the same as the finger F shown in the fourth embodiment. On the other hand, the other fingers are slightly different in shape and construction from the above-described embodiment, but they are provided with a
人差し指F2,中指F3,薬指F4および小指F5は支持体100に屈曲/伸展および開閉可能に接続されている。なお、この接続は、実施例1から3における、中手骨1と基節骨2との接続や実施例4における支持骨7と中手骨1との接続と同様の方法を用いることができるが、当然ながら他の方法を用いることもできる。本実施例では、この接続は実施例3における中手骨1と基節骨2との接続と同様の方法を用いている。すなわち、人差し指F2,中指F3,薬指F4および小指F5の初期姿勢は伸展かつ開姿勢であり、各々の指に接続された屈曲線状部材W2を引くことにより、各々の指は閉姿勢に変位した後に屈曲姿勢に変位する。なお、人差し指F2と中指F3との閉姿勢方向は図中時計回りであり、薬指F4と小指F5との閉姿勢方向は図中反時計回りである。
The index finger F2, middle finger F3, ring finger F4 and little finger F5 are connected to the
一方、親指F1は支持体100に対してヒンジHを介して接続されている。なお、親指F1はヒンジHに対して回動軸A8を中心として回動可能となっている。
On the other hand, the thumb F1 is connected to the
次に、このロボットハンドを用いて握手する際の動作を説明する。図13は本実施例におけるロボットハンドの初期姿勢である。具体的には、親指F1、人差し指F2,中指F3,薬指F4および小指F5は伸展姿勢かつ開姿勢である。この初期姿勢にあるロボットハンドに対して、親指F1に接続されている伸展線状部材W1と親指F1、人差し指F2,中指F3,薬指F4および小指F5に接続されている屈曲線状部材W2に引退力を作用させる。すると、上述したように、親指F1の中手骨1は支持骨7に対して回動軸A6を中心として図中時計回りに回動し、親指F1は閉姿勢に変位する。一方、人差し指F2および中指F3の中手骨1は支持部材100に対して各々の回動軸A0を中心として時計回りに回動し、薬指F4および小指F5の中手骨1は支持部材100に対して各々の回動軸A0を中心として図中反時計回りに回動し、親指F1、人差し指F2,中指F3,薬指F4は閉姿勢に変位する。この状態のロボットハンドを図14に示している。握手する際の初期動作として、親指F1をこのような閉姿勢に変位させることにより、相手の手が入り込むための空間を大きくし、手を握りやすくしている。
Next, we will explain the action of shaking hands using this robot hand. FIG. 13 shows the initial posture of the robot hand in this embodiment. Specifically, the thumb F1, the index finger F2, the middle finger F3, the ring finger F4 and the little finger F5 are in the extended posture and the open posture. With respect to the robot hand in this initial posture, the extended linear member W1 connected to the thumb F1 and the bent linear member W2 connected to the thumb F1, index finger F2, middle finger F3, ring finger F4 and little finger F5 are retracted. exert force. Then, as described above, the
そして、ロボットハンドの手の平と相手の手の平とを合わせ、人差し指F2,中指F3,薬指F4および小指F5に接続されている屈曲線状部材W2にさらに引退力を作用させる。これにより、人差し指F2,中指F3,薬指F4および小指F5のMP関節91,PIP関節92およびDIP関節93は屈曲し、これらの指は屈曲姿勢に変位する。また、親指F1の伸展線状部材W1の引退力を解除するとともに、屈曲線状部材W2に引退力を作用させる。これにより、親指F1は先ず開姿勢に復帰した後、CM関節94,MP関節91およびIP関節95が屈曲し、屈曲姿勢に変位する。この状態のロボットハンドを図15に示している。 Then, the palm of the robot hand and the palm of the opponent's hand are brought together, and a retracting force is further applied to the bent linear member W2 connected to the index finger F2, middle finger F3, ring finger F4 and little finger F5. As a result, the MP joint 91, PIP joint 92 and DIP joint 93 of the index finger F2, the middle finger F3, the ring finger F4 and the little finger F5 are bent, and these fingers are displaced to the bent posture. In addition, the withdrawal force of the extension linear member W1 of the thumb F1 is released, and the withdrawal force is applied to the bending linear member W2. As a result, the thumb F1 first returns to the open posture, then the CM joint 94, the MP joint 91, and the IP joint 95 are bent and displaced to the bent posture. FIG. 15 shows the robot hand in this state.
さらに親指F1の屈曲線状部材W2に引退力を作用させると、図16に示すように、親指F1は屈曲姿勢のまま回動軸A6を中心として図中時計回りに回動し、閉姿勢に変位する。人間が強く握手した際には親指はこのような動きとなるため、本実施例のロボットハンドと握手した際には、より人間らしさを感じることができる。 Further, when a retracting force is applied to the bent linear member W2 of the thumb F1, as shown in FIG. 16, the thumb F1 rotates clockwise about the rotation axis A6 while maintaining the bent posture, and enters the closed posture. Displace. When a human handshakes strongly, the thumb moves in this way, so when shaking hands with the robot hand of the present embodiment, it is possible to feel more human-like.
〔別実施形態〕
(1)実施例1,2において伸展線状部材W1を末節骨4に接続したが、伸展線状部材W1を基節骨2や中節骨3に接続しても構わない。同様に、実施例3において屈曲線状部材W2を末節骨4に接続したが、屈曲線状部材W2を基節骨2や中節骨3に接続しても構わない。これらの場合、伸展線状部材W1や屈曲線状部材の接続位置よりも指先側に位置する関節(PIP関節92および/またはDIP関節93)はそれぞれの関節に設けられたバネ84および/または85の作用によって伸展/屈曲させることができる。なお、実施例1において伸展線状部材W1を基節骨2に接続し、伸展線状部材W1と屈曲線状部材W2とを異なるアクチュエータに接続すると、MP関節91が開閉方向のいかなる姿勢であっても、MP関節91を伸展姿勢とした状態でPIP関節92およびDIP関節93を屈曲させることができる。
[Another embodiment]
(1) In Examples 1 and 2, the extension wire member W1 was connected to the
(2)上述の実施形態では、弾性体としてコイルバネを用いたが、板バネ等の他のバネや、バネ以外の弾性体を用いても構わない。 (2) In the above embodiments, the coil spring is used as the elastic body, but other springs such as leaf springs or elastic bodies other than springs may be used.
(3)上述の実施形態では、バネ81,84,85を指Fの上側に設けたが、指Fの下側に設けても構わない。また、バネ82は指Fの開閉方向初期姿勢側の側面に設けたが、指Fの開閉方向回動姿勢側の側面に設けて構わない。さらに、バネ82,83を、回動軸A2を挟んでそれぞれ開閉方向初期姿勢側、開閉方向回動姿勢側に設けたが、これらを入れ替えても構わない。ただし、これらのように配置位置を変更する場合には、圧縮コイルバネは引張コイルバネに、引張コイルバネは圧縮コイルバネに変更する必要がある。
(3) In the above embodiment, the
(4)本発明の目的を達する限りにおいて、上述の実施形態は適宜変更可能であり、また実施例どうしの組み合わせも可能である。 (4) As long as the object of the present invention is achieved, the above embodiments can be modified as appropriate, and combinations of the embodiments are also possible.
本発明は、ロボットハンドの指の付け根の関節をはじめとするロボット関節の可動構造に適用することができる。このような可動構造をロボットの指の付け根の関節に適用することにより、簡易な構造で手を握った状態(グーの形状)から開いた状態(パーの形状)、または、その反対に動作させることができる。このようなロボットハンドは、例えば、遠隔コミュニケーションシステムにも用いることができる。このような遠隔コミュニケーションシステムでは、例えば、ユーザ1がいる地点1に本発明に係る関節の可動構造を有するロボットハンドとモニタを設置し、ユーザ2がいる地点2にデータグローブ等の手の動きを感知できるセンサとカメラとを設置する。地点2のカメラによって撮影された映像は地点1のモニタに表示され、ユーザ1はユーザ2を視認することができる。また、地点2において、センサによってユーザ2の手を握る動作を感知するとその情報は地点1のロボットハンドの動作に反映され、ロボットハンドはユーザ1の手を握るように各指Fの関節を屈曲させる。このような遠隔コミュニケーションシステムを用いることにより擬似的な身体の接触が可能となり、物理的に離れた場所にいるにも関わらず親近感を高めることができる。上述したように、本発明に係る関節の可動構造を採用した遠隔コミュニケーションシステムでは、指の付け根の関節を開閉させることができるため、いわゆる恋人つなぎや握手が可能となる。
The present invention can be applied to movable structures of robot joints, including joints at the base of fingers of robot hands. By applying such a movable structure to the joints at the base of the fingers of the robot, it is possible to move from a clenched state (Goo shape) to an open state (Pa shape) or vice versa with a simple structure. be able to. Such robotic hands can also be used, for example, in remote communication systems. In such a remote communication system, for example, a robot hand having a movable joint structure according to the present invention and a monitor are installed at a
A1:回動軸(第1回動軸)
A2:回動軸(第2回動軸)
A5:回動軸(第1回動軸)
A6:回動軸(第2回動軸)
F:指
F1:親指(親指構造体)
F2:人差し指(指構造体)
F3:中指(指構造体)
F4:薬指(指構造体)
F5:小指(指構造体)
W1:伸展線状部材(屈伸方向力作用線状部材)
W2:屈曲線状部材(屈伸方向力作用線状部材)
1:中手骨(第1部材,第2部材)
2:基節骨(第2部材)
3:中節骨
4:末節骨
5:力変換部材
54a:ガイド面
54b:前端部(作用点)
7:支持骨(第1部材)
8:バネ
81:バネ(第1弾性体)
82:バネ(第2弾性体)
83:バネ(第2弾性体)
86:バネ(第2弾性体)
87U:バネ(第1弾性体)
87L:バネ(第1弾性体)
91:MP関節(関節)
92:PIP関節
93:DIP関節
94:CM関節(関節)
95:IP関節
A1: Rotating shaft (first rotating shaft)
A2: Rotation shaft (second rotation shaft)
A5: Rotating shaft (first rotating shaft)
A6: Rotating shaft (second rotating shaft)
F: finger F1: thumb (thumb structure)
F2: index finger (finger structure)
F3: middle finger (finger structure)
F4: ring finger (finger structure)
F5: little finger (finger structure)
W1: Extension wire member (bending and stretching direction force acting wire member)
W2: Bending linear member (bending and stretching direction force acting linear member)
1: Metacarpal bone (first member, second member)
2: Proximal phalanx (second member)
3: middle phalanx
4: distal phalanx 5: force conversion member
54a:
7: Supporting bone (first member)
8: Spring 81: Spring (first elastic body)
82: Spring (second elastic body)
83: Spring (second elastic body)
86: Spring (second elastic body)
87U: Spring (first elastic body)
87L: Spring (first elastic body)
91: MP joint (joint)
92: PIP joint 93: DIP joint 94: CM joint (joint)
95: IP joint
Claims (9)
前記第2部材が第1回動軸周りに回動することにより屈曲姿勢と伸展姿勢との間の姿勢に変位可能であるとともに、前記第2部材が前記第1回動軸に交差する方向の第2回動軸周りに回動することにより閉姿勢と開姿勢との間の姿勢に変位可能な関節の可動構造において、
前記屈曲姿勢と前記伸展姿勢との一方を屈伸方向初期姿勢とし、他方を屈伸方向回動姿勢とするとともに、前記閉姿勢と前記開姿勢との一方を開閉方向初期姿勢とし、他方を開閉方向回動姿勢とし、
前記第1部材と前記第2部材とにわたって設けられ、前記関節に前記屈伸方向初期姿勢側への力である屈伸方向力を作用させる第1弾性体と、
前記第1部材と前記第2部材とにわたって設けられ、前記関節に前記開閉方向初期姿勢側への力である開閉方向力を作用させる第2弾性体と、
前記第1部材側への引退力を作用させることにより、前記関節に前記屈伸方向回動姿勢側への力を作用させる屈伸方向力作用線状部材と、
前記屈伸方向力作用線状部材に対する前記引退力を、前記関節を前記開閉方向回動姿勢に変位させる力に変換する力変換部材と、を備えている関節の可動構造。 A joint movable structure comprising a first member and a second member,
By rotating the second member around the first rotating shaft, the second member can be displaced to a posture between a bending posture and an extended posture, and the second member can move in a direction intersecting the first rotating shaft. In a movable structure of a joint that can be displaced to a posture between a closed posture and an open posture by rotating around a second rotation axis,
One of the bending posture and the extension posture is defined as an initial posture in the bending and stretching direction, and the other is defined as a rotating posture in the bending and stretching direction. as a dynamic posture,
a first elastic body that is provided across the first member and the second member and applies a bending-stretching direction force, which is a force toward the bending-stretching direction initial posture side, to the joint;
a second elastic body that is provided across the first member and the second member and applies an opening/closing direction force, which is a force toward the opening/closing direction initial posture side, to the joint;
a bending and stretching direction force acting linear member that applies a force toward the bending and stretching direction rotational posture side to the joint by applying a retraction force toward the first member;
and a force conversion member that converts the retraction force applied to the bending and stretching direction force acting linear member into a force that displaces the joint to the opening and closing direction rotational posture.
前記屈伸方向回動姿勢は前記屈曲姿勢であり、
前記開閉方向初期姿勢は前記閉姿勢であり、
前記開閉方向回動姿勢は前記開姿勢であり、
前記屈伸方向力作用線状部材は、前記関節に前記伸展姿勢側への力を作用させる伸展線状部材であり、
前記第1部材側への引退力を作用させることにより、前記関節に前記屈曲姿勢側への力を生じさせる屈曲線状部材を備えている請求項1記載の関節の可動構造。 The initial posture in the bending and stretching direction is the stretching posture,
The bending and stretching direction rotation posture is the bending posture,
the initial posture in the opening/closing direction is the closed posture;
The opening/closing direction rotation posture is the open posture,
The bending and stretching direction force application linear member is an extension linear member that exerts a force on the joint toward the extension posture side,
2. The joint movable structure according to claim 1, further comprising a bent linear member that exerts a force on the joint toward the bent position by applying a retraction force toward the first member.
前記屈伸方向回動姿勢は前記伸展姿勢であり、
前記開閉方向初期姿勢は前記閉姿勢であり、
前記開閉方向回動姿勢は前記開姿勢であり、
前記屈伸方向力作用線状部材は、前記関節に前記伸展姿勢側への力を作用させる伸展線状部材であり、
前記第1弾性体の前記屈伸方向力は、前記第2弾性体の開閉方向力よりも小さい請求項1記載の関節の可動構造。 The bending and stretching direction initial posture is the bending posture,
The bending and stretching direction rotation posture is the stretching posture,
the initial posture in the opening/closing direction is the closed posture;
The opening/closing direction rotation posture is the open posture,
The bending and stretching direction force application linear member is an extension linear member that exerts a force on the joint toward the extension posture side,
2. The joint movable structure according to claim 1, wherein the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
前記屈伸方向回動姿勢は前記屈曲姿勢であり、
前記開閉方向初期姿勢は前記開姿勢であり、
前記開閉方向回動姿勢は前記閉姿勢であり、
前記屈伸方向力作用線状部材は、前記関節に前記屈曲姿勢側への力を作用させる屈曲線状部材であり、
前記第2弾性体の前記開閉方向力は、前記第1弾性体の前記屈伸方向力よりも小さい請求項1記載の関節の可動構造。 The initial posture in the bending and stretching direction is the stretching posture,
The bending and stretching direction rotation posture is the bending posture,
The opening/closing direction initial posture is the open posture,
The opening/closing direction rotation posture is the closing posture,
The bending and stretching direction force applying linear member is a bending linear member that applies a force to the joint in the bending posture side,
2. The joint movable structure according to claim 1, wherein the force in the opening and closing direction of the second elastic body is smaller than the force in the bending and stretching direction of the first elastic body.
前記屈伸方向回動姿勢は前記屈曲姿勢であり、
前記開閉方向初期姿勢は前記開姿勢であり、
前記開閉方向回動姿勢は前記閉姿勢であり、
前記屈伸方向力作用線状部材は、前記関節に前記伸展姿勢側への力を作用させる伸展線状部材であり、
前記第1部材側への引退力を作用させることにより、前記関節に前記屈曲姿勢側への力を生じさせる屈曲線状部材を備え、
前記第1弾性体の前記屈伸方向力は、前記第2弾性体の開閉方向力よりも小さい請求項1記載の関節の可動構造。 The initial posture in the bending and stretching direction is the stretching posture,
The bending and stretching direction rotation posture is the bending posture,
The opening/closing direction initial posture is the open posture,
The opening/closing direction rotation posture is the closing posture,
The bending and stretching direction force application linear member is an extension linear member that exerts a force on the joint toward the extension posture side,
a bending linear member that exerts a force toward the bending posture side on the joint by applying a retraction force toward the first member;
2. The joint movable structure according to claim 1, wherein the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
前記屈伸方向回動姿勢は前記屈曲姿勢であり、
前記開閉方向初期姿勢は前記開姿勢であり、
前記開閉方向回動姿勢は前記閉姿勢であり、
前記屈伸方向力作用線状部材は、前記関節に前記屈曲姿勢側への力を作用させる屈曲線状部材であり、
前記第1弾性体の前記屈伸方向力は、前記第2弾性体の開閉方向力よりも小さい請求項1記載の関節の可動構造。 The initial posture in the bending and stretching direction is the stretching posture,
The bending and stretching direction rotation posture is the bending posture,
The opening/closing direction initial posture is the open posture,
The opening/closing direction rotation posture is the closing posture,
The bending and stretching direction force applying linear member is a bending linear member that applies a force to the joint in the bending posture side,
2. The joint movable structure according to claim 1, wherein the force in the bending and stretching direction of the first elastic body is smaller than the force in the opening and closing direction of the second elastic body.
前記第2部材の前記第1部材側端部に設けられ、
前記第2回動軸回りに前記第2部材と略一体的に回動可能であり、
前記屈伸方向力作用線状部材の引退力が作用する作用点を備え、
前記作用点は、前記第2回動軸よりも開閉方向回動姿勢側に位置している請求項1から6のいずれか一項に記載の関節の可動構造。 The force conversion member is
provided at the end of the second member on the side of the first member,
rotatable about the second rotating shaft substantially integrally with the second member;
comprising an action point on which the retraction force of the bending and stretching direction force action linear member acts,
The movable structure of the joint according to any one of claims 1 to 6, wherein the point of action is located on the side of the opening/closing direction rotation attitude with respect to the second rotation shaft.
前記ガイド面は、前記第1部材側ほど開閉方向初期姿勢側に傾斜し、
前記作用点は前記ガイド面の前記第2部材側の端部である請求項7記載の関節の可動構造。 the force conversion member has a guide surface that guides the linear force acting member in the bending and stretching directions,
the guide surface is inclined toward the opening/closing direction initial posture side toward the first member;
8. The joint movable structure according to claim 7, wherein the point of action is the end of the guide surface on the side of the second member.
前記親指構造体は、請求項5または6記載の関節の可動構造を備え、
前記関節はCM関節であり、
前記第2部材は中手骨であるロボットハンド。
A robotic hand comprising a thumb structure and at least one finger structure,
The thumb structure comprises the joint movable structure according to claim 5 or 6,
the joint is a CM joint;
The robot hand, wherein the second member is a metacarpal bone.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023566119A JPWO2023105926A1 (en) | 2021-12-06 | 2022-10-17 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021197422 | 2021-12-06 | ||
| JP2021-197422 | 2021-12-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023105926A1 true WO2023105926A1 (en) | 2023-06-15 |
Family
ID=86730119
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/038499 WO2023105926A1 (en) | 2021-12-06 | 2022-10-17 | Movable joint structure and robot hand comprising movable joint structure |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2023105926A1 (en) |
| WO (1) | WO2023105926A1 (en) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62228391A (en) * | 1986-03-31 | 1987-10-07 | 工業技術院長 | Human resemblance type hand-palm mechanism |
| WO2020105504A1 (en) * | 2018-11-20 | 2020-05-28 | 株式会社メルティンMmi | Robot hand device |
-
2022
- 2022-10-17 WO PCT/JP2022/038499 patent/WO2023105926A1/en active Application Filing
- 2022-10-17 JP JP2023566119A patent/JPWO2023105926A1/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62228391A (en) * | 1986-03-31 | 1987-10-07 | 工業技術院長 | Human resemblance type hand-palm mechanism |
| WO2020105504A1 (en) * | 2018-11-20 | 2020-05-28 | 株式会社メルティンMmi | Robot hand device |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023105926A1 (en) | 2023-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9126342B2 (en) | Self-adaptive mechanical finger and method | |
| JP7402882B2 (en) | Robotic end effector with rear-supported actuator mechanism | |
| CA2964199C (en) | Mechanical finger for grasping apparatus | |
| US5762390A (en) | Underactuated mechanical finger with return actuation | |
| JP7009072B2 (en) | Finger mechanism and humanoid hand incorporating this finger mechanism | |
| JP2017503668A (en) | Hand movement intended to be installed on a humanoid robot | |
| JP4643429B2 (en) | Hand device | |
| JP2003117873A5 (en) | ||
| US8840160B2 (en) | Mechanical finger | |
| KR20030029833A (en) | Articulated bending mechanism for legged mobile robot, and legged mobile robot | |
| US12090636B2 (en) | Robot hand device | |
| CN115151388A (en) | Robot hand | |
| WO2023105926A1 (en) | Movable joint structure and robot hand comprising movable joint structure | |
| CN114131644A (en) | Mechanical arm | |
| CN118952264A (en) | Finger mechanism and robot | |
| JP7620566B2 (en) | Multi-fingered mechanism and device | |
| WO2019216293A1 (en) | Joint structure and robot hand | |
| KR102362574B1 (en) | Robot hand and finger device of robot hand | |
| JP6936031B2 (en) | Finger mechanism and hand incorporating this finger mechanism | |
| WO2022186033A1 (en) | Robot hand provided with articulated finger | |
| CN115151387A (en) | robotic hand | |
| US20230029226A1 (en) | Spherical Dexterous Hand for Object Grasping and Within-Hand Manipulation | |
| CN115210050A (en) | Robot hand | |
| JP4892257B2 (en) | Gripping device | |
| WO2023228540A1 (en) | Robot hand |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22903860 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023566119 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22903860 Country of ref document: EP Kind code of ref document: A1 |