WO2023073936A1 - 信号処理システムおよび信号処理方法 - Google Patents
信号処理システムおよび信号処理方法 Download PDFInfo
- Publication number
- WO2023073936A1 WO2023073936A1 PCT/JP2021/040046 JP2021040046W WO2023073936A1 WO 2023073936 A1 WO2023073936 A1 WO 2023073936A1 JP 2021040046 W JP2021040046 W JP 2021040046W WO 2023073936 A1 WO2023073936 A1 WO 2023073936A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sar image
- sar
- analyzed
- simulated
- signal processing
- Prior art date
Links
- 238000012545 processing Methods 0.000 title claims abstract description 151
- 238000003672 processing method Methods 0.000 title claims description 5
- 238000003384 imaging method Methods 0.000 claims abstract description 57
- 230000008859 change Effects 0.000 claims description 117
- 238000001514 detection method Methods 0.000 claims description 111
- 238000000034 method Methods 0.000 description 42
- 230000008569 process Effects 0.000 description 26
- 238000010586 diagram Methods 0.000 description 20
- 230000006870 function Effects 0.000 description 16
- 238000005516 engineering process Methods 0.000 description 12
- 238000003325 tomography Methods 0.000 description 11
- 239000013598 vector Substances 0.000 description 10
- 230000001427 coherent effect Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000010365 information processing Effects 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000010191 image analysis Methods 0.000 description 3
- 230000015654 memory Effects 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
- G01S13/9021—SAR image post-processing techniques
- G01S13/9023—SAR image post-processing techniques combined with interferometric techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
- G01S13/9021—SAR image post-processing techniques
- G01S13/9027—Pattern recognition for feature extraction
Definitions
- the present invention relates to a signal processing system, a signal processing method and a signal processing program.
- Patent Documents 1 to 4 describe change detection technology using SAR images.
- US Pat. No. 5,900,003 describes a computer-implemented method for determining coherence between composite images having phase and amplitude components.
- Patent Document 2 describes a method of processing SAR image data including multiple frames for each of multiple image shapes.
- Patent Document 3 also describes a method and apparatus for detecting at least one target in an image in which the image includes a set of pixels having a size assigned to each pixel.
- Patent Document 4 describes a disaster countermeasures support method for accurately, quickly and systematically planning countermeasures, activities, etc. during emergency response after a disaster and restoration/reconstruction.
- a synthetic aperture radar mounted on an artificial satellite photographs the ground surface of a photographing target during normal times before a disaster occurs, and acquires radar image data.
- the disaster countermeasure support method described in Patent Document 4 captures images of the ground surface to be captured within days shorter than the number of days of return orbit after the occurrence of a disaster, and compares them with radar image data during normal operation to quickly Try to understand the damage situation.
- Patent Documents 1 to 4 A technology that detects changes from the steady state by using the complex correlation coefficient between a complex image that indicates the steady state according to the shooting conditions of the SAR image to be analyzed and the SAR image that is to be analyzed. , are not described in Patent Documents 1 to 4.
- the disaster countermeasure support method described in Patent Document 4 uses only the reflection intensity of the reflected wave. That is, the techniques described in Patent Documents 1 to 4 cannot correctly detect changes from the steady state.
- one object of the present invention is to provide a signal processing system, a signal processing method, and a signal processing program that can correctly detect changes from a steady state.
- the signal processing system is a three-dimensional data having reflection intensity information and phase information at a three-dimensional position in a steady state reconstructed using observed SAR images taken by SAR. It is characterized by including generating means for generating a simulated SAR image, which is a complex image showing a steady state suitable for the imaging conditions of the SAR image to be analyzed, using the information and the imaging conditions of the SAR image to be analyzed. and
- the SAR area is a three-dimensional data having reflection intensity information and phase information at a three-dimensional position in a steady state reconstructed using the captured SAR image.
- a computer generates a simulated SAR image, which is a complex image representing a steady state suitable for the shooting conditions of the SAR image to be analyzed, using the information and the shooting conditions of the SAR image to be analyzed. do.
- the signal processing program according to the present invention is stored in a computer with data having reflection intensity information and phase information at three-dimensional positions in a steady state reconstructed using observed SAR images captured by SAR.
- the generation process is executed to generate a simulated SAR image, which is a complex image showing a steady state suitable for the imaging conditions of the SAR image to be analyzed. It is characterized by
- FIG. 4 is an explanatory diagram showing the relationship between the coherence value and the reflection intensity/phase correlation between SAR images
- FIG. 2 is an explanatory diagram showing an example of a SAR satellite photographing a building
- FIG. 4 is an explanatory diagram showing an example of a layover phenomenon that occurs in SAR images
- 1 is a block diagram showing a configuration example of a signal processing system according to a first embodiment of the present invention
- FIG. 4 is an explanatory diagram showing an example of a method of estimating a complex reflection intensity distribution in a pixel corresponding to an azimuth-range position (x ⁇ ) in SAR tomography by the three-dimensional information reconstruction unit 110;
- FIG. 4 is a flow chart showing the operation of signal processing by the signal processing system 100 of the first embodiment; 4 is a flowchart showing operations of three-dimensional information reconstruction processing by the three-dimensional information reconstruction unit 110 of the first embodiment; 4 is a flowchart showing the operation of simulated SAR image generation processing by the simulated SAR image generator 120 of the first embodiment; It is a block diagram which shows the structural example of the signal processing system of the 2nd Embodiment of this invention.
- FIG. 7 is an explanatory diagram showing a specific example of first change detection processing by a first change detection unit 130; 9 is a flowchart showing signal processing operations performed by the signal processing system 101 of the second embodiment.
- FIG. 10 is a flowchart showing the operation of first change detection processing by the first change detection unit 130 of the second embodiment
- FIG. 11 is a block diagram showing a configuration example of a signal processing system according to a third embodiment of the present invention
- FIG. 10 is a flowchart showing signal processing operations performed by the signal processing system 102 of the third embodiment.
- FIG. 14 is a flowchart showing the operation of second change detection processing by a second change detection unit 140 of the third embodiment
- FIG. 1 is an explanatory diagram showing a hardware configuration example of a signal processing system according to the present invention
- FIG. 1 is a block diagram showing an overview of a signal processing system according to the present invention;
- the technology described above is realized by selecting or generating image data indicating a steady state from image data accumulated in the past and detecting changes in the image to be analyzed.
- a SAR (Synthetic Aperture Radar) image is a complex image that has reflection intensity information and phase information of the irradiated microwave for each pixel.
- Coherent change detection technology is one of the change detection technologies for complex images.
- Coherent change detection technology is a technology that can detect minute changes from the steady state based on the level of the complex correlation coefficient (coherence), which indicates the degree of similarity between images.
- Coherence which is a complex correlation coefficient between SAR images, is an index that indicates "correlation of intensity and phase in a local region" between SAR images.
- Fig. 1 is an explanatory diagram showing the relationship between the coherence value and the correlation of reflection intensity and phase between SAR images. As shown in FIG. 1, when the coherence value is high, both the similarity of reflection intensity and the similarity of phase between SAR images are high. That is, there is little change between SAR images.
- the coherence value is an index that is more sensitive to changes in the phase than to changes in the reflection intensity of the reflected wave. As shown in FIG. 1, the coherence value is lower when the phase similarity is lower than the reflection intensity similarity. Coherent change detection technology can also catch reflector swapping.
- the problem to be solved by the present invention is to generate a complex image showing a steady state suitable for SAR image analysis.
- SAR images observed by SAR satellites orbiting the earth have different shooting conditions (for example, the position of the satellite at the time of observation) for each observation. Therefore, even when observing the same steady state, the SAR images obtained for each observation are different. In particular, in areas with buildings with height differences, such as urban areas, the phase information changes greatly for each observation. Therefore, if a complex image showing a steady state according to each imaging condition cannot be generated, changes in the image due to differences in the imaging conditions will be interpreted as changes that occur within the area to be analyzed, which can lead to false detections. .
- FIG. 2 is an explanatory diagram showing an example of a SAR satellite photographing a building.
- SAR satellites are artificial satellites equipped with SAR.
- Observations 1 and 2 shown in FIG. 2 have different shooting conditions. Observation 1 and observation 2 differ in the amount of phase change that depends on the height of the building. Therefore, even in the same steady state, the observed SAR images have different phases.
- FIG. 3 is an explanatory diagram showing an example of the layover phenomenon that occurs in SAR images.
- a two-dimensional image (SAR image) of overlapping buildings and houses is captured, as shown in Figure 3.
- a region where the building and the house overlap in the two-dimensional image shown in FIG. 3 is a layover region where signals received from a plurality of reflectors overlap.
- a layover area is an area in which it is difficult to extract information on individual buildings because information on multiple buildings overlaps.
- the phase of the SAR image obtained for each observation also depends on the reflection intensity of the overlapping buildings. Since the degree of overlapping of buildings differs under different imaging conditions, the observed SAR images have different phases even in the same steady state.
- phase information other than coherence values there is a method of extracting phase information from SAR images as real values and using the obtained real values to obtain correlation.
- FIG. 4 is a block diagram showing a configuration example of the signal processing system according to the first embodiment of the present invention.
- the signal processing system 100 of this embodiment generates a simulated SAR image from a group of accumulated observed SAR images.
- the simulated SAR image of this embodiment uses the reconstructed three-dimensional information of the analysis target area (data having reflection intensity information and phase information at each three-dimensional position in the steady state) as the analysis target.
- a two-dimensional image simulating the reflection intensity and phase information expected to be observed under the same imaging conditions as the SAR image to be analyzed. means complex image.
- the SAR image to be analyzed is the image obtained by capturing by the SAR satellite, and is the SAR image to which change detection is applied. That is, the simulated SAR image is a complex image showing a steady state suitable for the shooting conditions of the SAR image to be analyzed.
- the signal processing system 100 includes a three-dimensional information reconstruction unit 110 and a simulated SAR image generation unit 120. Also, as shown in FIG. 4, the signal processing system 100 is communicably connected to the SAR image storage unit 200 .
- the signal processing system 100 may include only the simulated SAR image generation unit 120.
- the SAR image storage unit 200 has a function of storing one or more observed SAR images. Note that the SAR image storage unit 200 may be included in the signal processing system 100 .
- the observed SAR image group accumulated in the SAR image storage unit 200 is input to the three-dimensional information reconstruction unit 110 .
- the input observation SAR image contains the position of the SAR satellite at the time of observation, the coordinates of the area to be analyzed, the information of the shooting conditions that indicate the resolution, etc., and the reflection intensity information and phase information of the irradiated microwave are pixelated. is a complex image with each Note that the three-dimensional information reconstruction unit 110 includes not only the observed SAR images in which the steady state is observed, but also the observed SAR images in which there is a change from the steady state in the area to be analyzed. good too.
- the three-dimensional information reconstruction unit 110 has a function of reconstructing and outputting three-dimensional information of an area to be analyzed (data having reflection intensity information and phase information at each three-dimensional position in a steady state). have.
- the three-dimensional information output by the three-dimensional information reconstruction unit 110 may be a three-dimensional complex reflection intensity distribution having reflection intensity and phase information, or may be a three-dimensional complex reflection intensity distribution having reflection intensity and phase information. It may be three-dimensional point cloud data, which is a set of points having points.
- the three-dimensional information to be output may have information such as temperature and displacement in addition to the information on the reflection intensity and phase.
- SAR tomography is a method for reconstructing 3D information in the 3D information reconstruction unit 110 .
- SAR tomography is a method of estimating the complex reflection intensity distribution in the elevation direction for each pixel using multiple observed SAR images.
- the elevation direction represents the direction perpendicular to the azimuth-range plane (the plane formed by the traveling direction and line-of-sight direction of the SAR satellite).
- FIG. 5 is an explanatory diagram showing an example of a method of estimating the complex reflection intensity distribution at a pixel corresponding to the azimuth-range position (x ⁇ ) in SAR tomography by the three-dimensional information reconstruction unit 110.
- FIG. 5 is an explanatory diagram showing an example of a method of estimating the complex reflection intensity distribution at a pixel corresponding to the azimuth-range position (x ⁇ ) in SAR tomography by the three-dimensional information reconstruction unit 110.
- the direction perpendicular to direction s in FIG. 5 represents the azimuth-range plane.
- the azimuth-range position (x ⁇ ) is the intersection of the axis indicating the elevation direction and the axis indicating the line-of-sight direction of the satellite in FIG.
- the 3D information reconstruction unit 110 estimates, for each pixel, a complex reflection intensity distribution that indicates the height, reflection intensity, and phase of buildings that constantly exist over the observation period. do.
- a three-dimensional complex reflection intensity distribution is generated by combining the complex reflection intensity obtained for each pixel for all pixels in the area to be analyzed. be done.
- observation SAR image group is input to the 3D information reconstruction unit 110 in order to reconstruct a 3D steady state using SAR tomography or the like, multiple images taken from slightly different orbits are required. This is because observation SAR images of
- N represents the total number of observations and is an integer greater than one.
- the first to N-th observations shown in FIG. 5 correspond to the synthetic aperture in the elevation direction.
- the relational expression between the received signal (complex signal) recorded at the pixel corresponding to the azimuth-range position (x ⁇ ) and the complex reflection intensity distribution at that pixel in the nth observation (where 1 ⁇ n ⁇ N) is , is given by the following equation (1).
- g obs (x ⁇ ,n) in equation (1) represents the received signal (complex signal) recorded in the pixel corresponding to the azimuth-range position (x ⁇ ).
- r ⁇ (x ⁇ , n) in equation (1) represents the steering vector at the pixel corresponding to the azimuth-range position (x ⁇ ).
- ⁇ ⁇ (x ⁇ ,n) in equation (1) represents the complex reflection intensity distribution at the pixel corresponding to the azimuth-range position (x ⁇ ).
- a steering vector is obtained from the imaging conditions.
- the steering vector r ⁇ (x ⁇ ,n) is represented by the following equation (2).
- k n in equation (2) represents a phase-altitude conversion coefficient (a coefficient for converting between phase and altitude).
- the steering vector may be expressed by a formula other than formula (2). For example, a steering vector that considers the effects of air temperature and displacement may be used.
- j in equation (2) represents an imaginary unit.
- ⁇ in the formula (2) represents the circular constant.
- a relational expression such as Equation (1) is determined for each of the 1st to Nth observations.
- the three-dimensional information reconstruction unit 110 solves an optimization problem using a plurality of observation data (received signals) and a steering vector, so that a pixel corresponding to the azimuth-range position (x ⁇ ) constantly exists Obtain the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) of the building.
- the three-dimensional information reconstructing unit 110 determines the complex reflection intensity distribution so that N times of observation data in which an area including a building or the like is photographed and N times of steering vectors match each other, thereby reconstructing the structure. , we obtain the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ).
- the lower part of FIG. 5 shows the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) of the constantly existing building at the pixel corresponding to the azimuth-range position (x ⁇ ) obtained by the three-dimensional information reconstruction unit 110 .
- is shown.
- corresponds to the reflection intensity on the vertical axis shown in FIG.
- the horizontal axis shown in FIG. 5 indicates the elevation position.
- the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) of the constantly existing building at the pixel corresponding to the azimuth-range position (x ⁇ ) shown in FIG . house) and s l3 (building) show high values. That is, the received signal at the position x ⁇ is a signal in which the complex reflection intensities at the elevation positions sl1 , sl2 , and sl3 are superimposed. Expressed more precisely, the received signal at position x ⁇ corresponds to the result of the Fourier transform of the complex reflection intensity distribution in the elevation direction.
- the three-dimensional information reconstruction unit 110 analyzes the complex reflection intensity distribution for each pixel obtained by solving the optimization problem. A three-dimensional complex reflection intensity distribution combined for all pixels is output as three-dimensional information.
- the three-dimensional information reconstruction unit 110 is not limited to the three-dimensional complex reflection intensity distribution as described above. It may be output as dimensional information.
- the simulated SAR image generation unit 120 receives the three-dimensional information reconstructed by the three-dimensional information reconstruction unit 110 (data having reflection intensity information and phase information at each three-dimensional position in a steady state). be.
- the three-dimensional information input to the simulated SAR image generation unit 120 may include information such as temperature and displacement in addition to information on reflection intensity and phase.
- the simulated SAR image generation unit 120 also receives the imaging conditions for one or more SAR images to be analyzed.
- the one or more SAR images to be analyzed may be one or more observed SAR images selected from the group of observed SAR images accumulated in the SAR image storage unit 200, or one newly acquired SAR image. It may be one or more observed SAR images.
- the plurality of SAR images to be analyzed may be a plurality of observed SAR images in which accumulated observed SAR images and acquired observed SAR images are mixed.
- the shooting conditions of the SAR image to be analyzed input to the simulated SAR image generation unit 120 are not limited to the shooting conditions of the observed SAR image used to reconstruct the three-dimensional information in the three-dimensional information reconstruction unit 110. , may be the imaging conditions in one or more newly acquired observation SAR images.
- the imaging conditions input to the simulated SAR image generation unit 120 are the position of the SAR satellite at the time of observation, the coordinates of the area to be analyzed, the resolution, and so on.
- the imaging conditions to be input may be the imaging conditions of the observed SAR images accumulated in the SAR image storage unit 200, or may be the imaging conditions of the newly acquired observed SAR images.
- the simulated SAR image generation unit 120 generates reconstructed three-dimensional information (data having reflection intensity information and phase information at each three-dimensional position in a steady state) and SAR images (groups) to be analyzed. It has a function of performing pseudo-observation using shooting conditions. Specifically, the simulated SAR image generation unit 120 generates a simulated SAR image, which is a complex image representing a steady state suitable for the imaging conditions of the SAR image (group) to be analyzed.
- the simulated SAR image generation unit 120 performs simulated observation for each imaging condition of the SAR image (group) to be analyzed. After performing one or more simulated observations, the simulated SAR image generator 120 outputs simulated SAR images (groups) corresponding to each of the obtained one or more imaging conditions.
- the signal processing system 100 of the present embodiment uses data having reflection intensity and phase information at each three-dimensional position in a steady state, that is, three-dimensional information, the imaging conditions of the SAR image (group) to be analyzed A simulated SAR image can be generated, which is a complex image showing the steady state adjusted to .
- the three-dimensional information reconstruction unit 110 of the signal processing system 100 calculates three-dimensional information using an observed SAR image in which a region is captured by SAR.
- the simulated SAR image generation unit 120 of the signal processing system 100 generates reflection intensity information and phase information at a three-dimensional position in a steady state reconstructed using an observed SAR image captured by SAR. Using the three-dimensional information, which is the data having the .
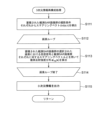
- FIG. 6 is a flow chart showing operation of signal processing by the signal processing system 100 of the first embodiment.
- the three-dimensional information reconstruction unit 110 of the signal processing system 100 executes three-dimensional information reconstruction processing (step S110).
- the 3D information reconstruction process is a process of reconstructing the 3D information of the area to be analyzed based on the accumulated observation SAR image group.
- the simulated SAR image generation unit 120 of the signal processing system 100 executes simulated SAR image generation processing (step S120).
- the simulated SAR image generation process is based on the imaging conditions of the SAR images (groups) to be analyzed and the reconstructed 3D information, and is observed under the same imaging conditions as the SAR images (groups) to be analyzed. This process generates simulated SAR image(s), which is an image(s) in which a simulated received signal is recorded.
- the signal processing system 100 After executing the simulated SAR image generation processing, the signal processing system 100 terminates the signal processing.
- FIG. 7 is a flow chart showing the operation of the three-dimensional information reconstruction processing by the three-dimensional information reconstruction unit 110 of the first embodiment.
- the three-dimensional information reconstruction unit 110 derives a steering vector r ⁇ (x ⁇ , n) from each imaging condition of the accumulated observation SAR image group (step S111).
- the three-dimensional information reconstruction unit 110 selects one pixel for which the complex reflection intensity distribution has not yet been calculated, among the pixels of the accumulated observed SAR image group. That is, the pixel loop is entered (step S112).
- the three-dimensional information reconstruction unit 110 uses the received signal at the selected pixel of the accumulated observed SAR image group and the steering vector for each observed SAR image group to reconstruct the complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ).
- a complex reflection intensity distribution ⁇ bg ⁇ (x ⁇ ) is calculated for the selected pixel corresponding to the position x ⁇ .
- the three-dimensional information reconstruction unit 110 repeats the process of step S113 while there are pixels for which the complex reflection intensity distribution has not been calculated among the pixels of the accumulated observation SAR image group.
- the three-dimensional information reconstruction unit 110 exits the pixel loop (step S114).
- the three-dimensional information reconstruction unit 110 exits the pixel loop, the three-dimensional information of the target area is reconstructed.
- the three-dimensional information reconstruction unit 110 After passing through the pixel loop, the three-dimensional information reconstruction unit 110 transforms the calculated three-dimensional complex reflection intensity distribution into data having information on the reflection intensity and phase at each three-dimensional position in the steady state, that is, three-dimensional Output as information.
- the three-dimensional information to be output may be the three-dimensional complex reflection intensity distribution as described above, or may be three-dimensional point cloud data, which is a set of points having reflection intensity and phase information (step S115).
- the 3D information reconstruction unit 110 ends the 3D information reconstruction processing.
- FIG. 8 is a flow chart showing the operation of simulated SAR image generation processing by the simulated SAR image generator 120 of the first embodiment.
- the simulated SAR image generator 120 derives a steering vector r ⁇ (x ⁇ , n) from each imaging condition of all input SAR images (groups) to be analyzed (step S121).
- the simulated SAR image generation unit 120 selects one imaging condition for which a simulated SAR image has not yet been generated from among the input imaging conditions of the SAR image (group) to be analyzed. In other words, the imaging condition loop is entered (step S122).
- the simulated SAR image generation unit 120 selects one pixel for which the simulated complex signal has not yet been calculated, among the pixels of the observed SAR image (group) corresponding to the selected imaging conditions. That is, the pixel loop is entered (step S123).
- the simulated SAR image generation unit 120 generates the selected pixels A simulated complex signal g sim (x ⁇ ,n) at the position x ⁇ corresponding to is calculated (step S124).
- the simulated SAR image generator 120 calculates a simulated complex signal according to, for example, the following equation (3).
- the simulated SAR image generator 120 may calculate the simulated complex signal according to a formula other than formula (3).
- the simulated complex signal g sim (x ⁇ ,n) at the position x ⁇ which is expected to be captured under the shooting conditions of the n-th SAR image, is calculated.
- the simulated SAR image generation unit 120 repeats the process of step S124 while there are pixels for which simulated complex signals have not been calculated among the pixels of the observed SAR image corresponding to the selected imaging conditions.
- the simulated SAR image generator 120 exits the pixel loop (step S125).
- the simulated SAR image generation unit 120 repeats the processing of steps S123 to S125 while there is an imaging condition in which no simulated SAR image is generated among the imaging conditions of the input SAR image (group) to be analyzed. .
- the simulated SAR image generator 120 exits the imaging condition loop (step S126).
- step S124 is executed for all positions under all imaging conditions of the input SAR image (group) to be analyzed, and the target area is of simulated SAR images are generated.
- the simulated SAR image generation unit 120 After exiting the imaging condition loop, the simulated SAR image generation unit 120 outputs a simulated SAR image, which is a complex image representing a steady state suitable for the imaging conditions of the input SAR image to be analyzed.
- the simulated SAR image generation unit 120 When the imaging conditions of the SAR image group to be analyzed are input, the simulated SAR image generation unit 120 generates a simulated complex image representing a steady state suitable for each imaging condition of the input SAR image group to be analyzed.
- a SAR image group is output (step S127). After outputting the simulated SAR image(s), the simulated SAR image generator 120 ends the simulated SAR image generation process.
- the three-dimensional information reconstruction unit 110 of the signal processing system 100 of the present embodiment based on the accumulated observation SAR image group, the reflection intensity and phase information at each three-dimensional position in the steady state of the area to be analyzed. , i.e., three-dimensional information.
- the simulated SAR image generator 120 also generates a simulated SAR image (group) based on the imaging conditions of the SAR image (group) to be analyzed and the reconstructed three-dimensional information.
- An advantage of using SAR tomography is that a simulated complex signal representing the reflection intensity and phase of each overlapping reflector is recorded in the simulated SAR image. Even if a DEM (Digital Elevation Model) or the like is used, it is difficult to generate a simulated complex signal that accurately indicates the reflection intensity and phase of each overlapping reflector. Therefore, users who perform coherent change detection using the generated simulated SAR images can robustly detect changes even in layover regions.
- DEM Digital Elevation Model
- the three-dimensional information reconstruction unit 110 uses SAR tomography as means for calculating three-dimensional information.
- the three-dimensional information reconstructing unit 110 may use, other than SAR tomography, other means capable of reproducing reflection intensity and phase as means for calculating three-dimensional information.
- FIG. 9 is a block diagram showing a configuration example of a signal processing system according to the second embodiment of the present invention.
- the signal processing system 101 includes a three-dimensional information reconstruction unit 110, a simulated SAR image generation unit 120, and a first change detection unit . Also, as shown in FIG. 9, the signal processing system 101 is communicably connected to the SAR image storage unit 200 .
- the functions of the three-dimensional information reconstruction unit 110 and the simulated SAR image generation unit 120 of this embodiment are the same as those of the first embodiment.
- the first change detection unit 130 receives simulated SAR images (groups) corresponding to all imaging conditions of the SAR images (groups) to be analyzed input to the simulated SAR image generation unit 120. is input from Also, the SAR image (group) to be analyzed is input to the first change detection unit 130 .
- the SAR image(s) to be analyzed contain the received signal, which provides reflected intensity and phase information.
- the first change detection unit 130 detects the value calculated by correlation processing using the phase information of the simulated SAR image and the phase information of the SAR image to be analyzed, or the determination result of the presence or absence of change by threshold processing. It has a function to output as
- the correlation only needs to represent the degree of similarity between the SAR image to be analyzed and the simulated SAR image (hereinafter referred to as "similarity").
- the similarity is, for example, the distance between multiple images.
- the degree of similarity may be represented by an index other than the distance between multiple images.
- correlation the degree of similarity is hereinafter referred to as correlation.
- FIG. 10 is an explanatory diagram showing a specific example of the first change detection processing by the first change detection unit 130.
- the three-dimensional information reconstruction unit 110 receives the observation SAR image group accumulated in the SAR image storage unit 200 and reconstructs three-dimensional information. Next, the 3D information reconstruction unit 110 outputs the reconstructed 3D information.
- the simulated SAR image generation unit 120 receives the shooting conditions of the SAR image to be analyzed and the reconstructed three-dimensional information.
- the simulated SAR image generation unit 120 uses the input imaging conditions to generate a complex image representing a steady state, that is, a simulated SAR image, in accordance with each imaging condition.
- the first change detection unit 130 of the present embodiment receives the SAR image to be analyzed input to the simulated SAR image generation unit 120 and the simulated SAR image generated by the simulated SAR image generation unit 120.
- the first change detection unit 130 detects whether or not there is a change from the steady state between the input SAR image to be analyzed and the simulated SAR image.
- the first change detection unit 130 calculates the coherence value ⁇ (x ⁇ ) at each position x ⁇ of the SAR image to be analyzed and the simulated SAR image. As described above, the calculated coherence value will be high if there is no change from the steady state. Also, if there is a change from the steady state, the calculated coherence value will be low.
- the first change detection unit 130 two-dimensionally plots the coherence value ⁇ (x ⁇ ) obtained at each position x ⁇ , for example.
- the SAR image to be analyzed includes a portion that has changed from the steady state, the changed portion is detected as a decrease in coherence value.
- the first change detection unit 130 can also identify the change detection location in the layover area. Note that the dashed frame in the change detection result shown in FIG. 10 corresponds to the layover area.
- the first change detection unit 130 may output the value itself calculated by the correlation processing using the phase information, or may output the determination result of the presence or absence of change by threshold processing.
- the first change detection unit 130 of the signal processing system 101 compares the SAR image to be analyzed with the simulated SAR image to detect changes occurring in the area of the SAR image to be analyzed. do.
- the detection means detects a change by calculating the degree of similarity between the SAR image to be analyzed and the simulated SAR image.
- the first change detection unit 130 may use the phase information indicated by the SAR image to be analyzed and the phase information indicated by the simulated SAR image to calculate the degree of similarity.
- the degree of similarity may be a coherence value.
- FIG. 11 is a flow chart showing operation of signal processing by the signal processing system 101 of the second embodiment.
- the three-dimensional information reconstruction unit 110 of the signal processing system 101 executes three-dimensional information reconstruction processing (step S210).
- the three-dimensional information reconstruction processing in step S210 is the same as the three-dimensional information reconstruction processing in step S110.
- step S220 the simulated SAR image generation unit 120 of the signal processing system 101 executes simulated SAR image generation processing.
- the simulated SAR image generation processing in step S220 is similar to the simulated SAR image generation processing in step S120.
- the first change detection process is a process of detecting a change by executing a correlation process using phase information.
- the signal processing system 101 After executing the first change detection process, the signal processing system 101 terminates signal processing.
- FIG. 12 is a flow chart showing the operation of the first change detection process by the first change detection section 130 of the second embodiment.
- the first change detection unit 130 selects one pixel for which the correlation has not yet been calculated among the pixels of the simulated SAR image. That is, the pixel loop is entered (step S231).
- the first change detection unit 130 calculates the correlation at selected pixels between the SAR image to be analyzed and the simulated SAR image generated under the same imaging conditions as the SAR image to be analyzed (step S232). .
- the first change detection unit 130 generates the complex signal gobs (x ⁇ ,n) in the selected pixel of the SAR image to be analyzed under the same shooting conditions as the SAR image to be analyzed. Then, the phase information is used to calculate the correlation with the simulated complex signal g sim (x ⁇ ,n) at the selected pixel of the simulated SAR image.
- the first change detection unit 130 may employ the coherence value obtained by the following equation (4) for the correlation to be calculated.
- first change detection section 130 may employ a value calculated by correlation processing using phase information.
- the first change detection unit 130 repeats the process of step S232 while there are pixels for which the correlation has not been calculated among the pixels of the simulated SAR image. When the correlations of all pixels of the simulated SAR image have been calculated, the first change detection unit 130 exits the pixel loop (step S233).
- the first change detection unit 130 After exiting the pixel loop, the first change detection unit 130 outputs detection results including a plurality of calculated correlations (step S234). After outputting the detection result, first change detection section 130 ends the first change detection process.
- the first change detection unit 130 When the simulated SAR image group is input, the first change detection unit 130 performs the first change detection process of step S230 for each input simulated SAR image.
- the first change detection unit 130 of the signal processing system 101 of the present embodiment detects the correlation between the SAR image to be analyzed and the simulated SAR image generated under the same photographing conditions as the SAR image to be analyzed. Calculate using information. By referring to the correlation calculated using the phase information, the user can easily detect changes from the steady state. Further, the first change detection unit 130 calculates the correlation between the simulated SAR image and the SAR image to be analyzed, so that the user can robustly detect changes even in the layover area.
- the first change detection unit 130 detects the correlation between the multiple SAR images to be analyzed and the corresponding simulated SAR images, respectively. By calculating, each change can be detected as a change from the steady state.
- the first change detection unit 130 displays the plurality of change detection results in chronological order when a plurality of change detection results are obtained as described above, the user can easily identify each change detection point and each change detection time. can be specified.
- FIG. 13 is a block diagram showing a configuration example of a signal processing system according to the third embodiment of the invention.
- the signal processing system 102 includes a three-dimensional information reconstruction unit 110, a simulated SAR image generation unit 120, and a second change detection unit 140. Also, as shown in FIG. 13, the signal processing system 102 is communicably connected to the SAR image storage unit 200 .
- the functions of the three-dimensional information reconstruction unit 110 and the simulated SAR image generation unit 120 of this embodiment are the same as those of the first embodiment.
- the imaging conditions of the SAR image group to be analyzed are input to the simulated SAR image generation unit 120 .
- the simulated SAR image generator 120 also outputs a simulated SAR image group corresponding to all imaging conditions of the SAR image group to be analyzed input to the simulated SAR image generator 120 .
- the second change detection unit 140 receives, from the simulated SAR image generation unit 120, a simulated SAR image group corresponding to all shooting conditions of the SAR image group to be analyzed input to the simulated SAR image generation unit 120. . Also, a group of SAR images to be analyzed is input to the second change detection unit 140 .
- the SAR image to be analyzed contains the received signal that indicates the information of the reflection intensity and phase.
- the second change detection unit 140 performs correlation processing using phase information for each pair of a SAR image to be analyzed and a simulated SAR image corresponding to the SAR image to be analyzed, and calculates A statistic obtained from the obtained values or a determination result of whether or not there is a change by threshold processing is output as a detection result.
- Statistics obtained from each value calculated for each pair by performing correlation processing using phase information for each pair of SAR image to be analyzed and simulated SAR image corresponding to the SAR image to be analyzed The quantity may be, for example, an average value or median value of values calculated by correlation processing using phase information.
- the simulated SAR image generation unit 120 of the signal processing system 102 generates simulated SAR images for each of the shooting conditions of a plurality of SAR images to be analyzed.
- second change detection section 140 calculates the degree of similarity across a plurality of pairs for each pair of the SAR image to be analyzed and the simulated SAR image. The degree of change is used to detect changes.
- the signal processing system 102 of the present embodiment may include a first change detection section 130 that further has the function of the second change detection section 140 instead of the second change detection section 140 .
- FIG. 14 is a flow chart showing operation of signal processing by the signal processing system 102 of the third embodiment.
- step S310 the 3D information reconstruction unit 110 of the signal processing system 102 executes 3D information reconstruction processing.
- the three-dimensional information reconstruction processing in step S310 is the same as the three-dimensional information reconstruction processing in step S110.
- step S320 the simulated SAR image generation unit 120 of the signal processing system 102 executes simulated SAR image generation processing.
- the simulated SAR image generation processing in step S320 is similar to the simulated SAR image generation processing in step S120.
- the second change detection process is a process of detecting a change by executing correlation processing using phase information a plurality of times and using statistics obtained from a plurality of calculated correlations.
- the signal processing system 102 After executing the second change detection process, the signal processing system 102 terminates signal processing.
- step S330 which is a sub-process constituting the signal processing shown in FIG. 14, will be described with reference to FIG.
- FIG. 15 is a flow chart showing the operation of the second change detection process by the second change detection section 140 of the third embodiment.
- the second change detection unit 140 calculates the correlation between the SAR image group to be analyzed and the simulated SAR image group generated under the same imaging conditions as those of the SAR image group to be analyzed (step S331). ). For example, the second change detection unit 140 performs correlation processing using phase information multiple times for each pair of the SAR image to be analyzed and the simulated SAR image.
- the second change detection unit 140 performs correlation processing using phase information for each pair of the SAR image to be analyzed and the simulated SAR image corresponding to the SAR image to be analyzed, and performs correlation processing for each pair.
- a statistic obtained from each value calculated for is calculated (step S332).
- the second change detection unit 140 calculates a statistic such as an average from the plurality of correlations calculated in step S331.
- the second change detection unit 140 outputs detection results including the calculated statistics (step S333). After outputting the detection result, second change detection section 140 ends the second change detection process.
- the second change detection unit 140 of the signal processing system 102 of the present embodiment performs correlation processing using phase information for each pair of a SAR image to be analyzed and a simulated SAR image corresponding to the SAR image to be analyzed. , and outputs the statistic itself obtained from each value calculated for each pair, or the result of determining whether or not there is a change by performing a threshold decision on the statistic.
- the use of statistics improves the robustness of change detection because it allows the evaluation of not only the high or low value of a single correlation, but also the difference of each correlation from a typical (eg, mean) value.
- the signal processing systems 101 and 102 of each embodiment are used to detect changes that occur in urban areas without the need for people to go there directly. Signal processing systems 101-102 are also utilized to quickly detect when and where changes occur in areas that are regularly monitored.
- the signal processing systems 101 and 102 of each embodiment will be applied to surveillance of military bases and cities in areas of concern from the viewpoint of security. The reason is that users of the signal processing systems 101 and 102 can quickly detect the appearance of an aircraft or vehicle in the surveillance area simply by comparing the SAR image to be analyzed with the simulated SAR image.
- the three-dimensional information estimated by the three-dimensional information reconstruction unit 110 by SAR tomography may be stored in a server or the like. Once the three-dimensional information has been pre-stored in a server or the like, a user of the signal processing systems 100-102 can generate a simulated SAR image for the area in which changes are to be detected. That is, it is not necessary for the user to reconstruct the three-dimensional information by himself/herself.
- the output of the first change detection unit 130 is added to the machine learning, the position of the object given to the teacher data is changed to the first It is limited to the output area of 1 change detection section 130 . That is, the range of annotation is narrowed, and the cost required for learning is reduced.
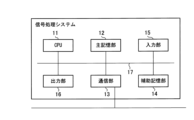
- FIG. 16 is an explanatory diagram showing a hardware configuration example of the signal processing system according to the present invention.
- the signal processing system shown in FIG. 16 includes a CPU (Central Processing Unit) 11, a main storage section 12, a communication section 13, and an auxiliary storage section . It also has an input unit 15 for user operation, and an output unit 16 for presenting the processing result or the progress of the processing content to the user.
- CPU Central Processing Unit
- the signal processing system is realized by software by the CPU 11 shown in FIG. 16 executing a program that provides the functions of each component.
- the CPU 11 loads the program stored in the auxiliary storage unit 14 into the main storage unit 12 and executes it to control the operation of the signal processing system, thereby realizing each function by software.
- the signal processing system shown in FIG. 16 may include a DSP (Digital Signal Processor) instead of the CPU 11.
- the signal processing system shown in FIG. 16 may include both the CPU 11 and the DSP.
- the main storage unit 12 is used as a data work area and a data temporary save area.
- the main storage unit 12 is, for example, a RAM (Random Access Memory).
- the communication unit 13 has a function of inputting data to and outputting data from peripheral devices via a wired network or a wireless network (information communication network).
- the auxiliary storage unit 14 is a non-temporary tangible storage medium.
- Non-temporary tangible storage media include, for example, magnetic disks, magneto-optical disks, CD-ROMs (Compact Disk Read Only Memory), DVD-ROMs (Digital Versatile Disk Read Only Memory), and semiconductor memories.
- the input unit 15 has a function of inputting data and processing instructions.
- the input unit 15 is, for example, an input device such as a keyboard or mouse.
- the output unit 16 has a function of outputting data.
- the output unit 16 is, for example, a display device such as a liquid crystal display device, or a printing device such as a printer.
- each component is connected to the system bus 17 in the signal processing system.
- the auxiliary storage unit 14 stores programs for realizing the three-dimensional information reconstruction unit 110 and the simulated SAR image generation unit 120.
- the signal processing system 100 may be implemented with, for example, a circuit containing hardware components such as LSI (Large Scale Integration) that implements the functions shown in FIG.
- LSI Large Scale Integration
- the auxiliary storage unit 14 stores programs for realizing the three-dimensional information reconstruction unit 110, the simulated SAR image generation unit 120, and the first change detection unit 130. are doing.
- the signal processing system 101 may be implemented with, for example, a circuit containing hardware components such as an LSI that implements the functions shown in FIG.
- the auxiliary storage unit 14 stores programs for realizing the three-dimensional information reconstruction unit 110, the simulated SAR image generation unit 120, and the second change detection unit 140. are doing.
- the signal processing system 102 may be implemented with a circuit containing hardware components such as an LSI that implements the functions shown in FIG. 13, for example.
- the signal processing systems 100 to 102 may be realized by hardware that does not include computer functions using elements such as CPUs.
- part or all of each component may be implemented by general-purpose circuitry, dedicated circuitry, processors, etc., or combinations thereof. These may be composed of a single chip (for example, the LSI described above), or may be composed of a plurality of chips connected via a bus. A part or all of each component may be implemented by a combination of the above-described circuit or the like and a program.
- constituent elements of the signal processing systems 100 to 102 may be composed of one or more information processing devices each having an arithmetic unit and a storage unit.
- the plurality of information processing devices, circuits, etc. may be centrally arranged or distributed.
- the information processing device, circuits, and the like may be implemented as a client-and-server system, a cloud computing system, or the like, each of which is connected via a communication network.
- FIG. 17 is a block diagram showing an overview of the signal processing system according to the present invention.
- the signal processing system 20 according to the present invention is a data having reflection intensity information and phase information at a three-dimensional position in a steady state reconstructed using observed SAR images taken by SAR.
- a generation means 21 (for example, includes a simulated SAR image generator 120).
- the signal processing system can detect changes from the steady state based on the phase information.
- the signal processing system 20 may also include calculation means (for example, the three-dimensional information reconstruction unit 110) that calculates three-dimensional information using the observed SAR image.
- calculation means for example, the three-dimensional information reconstruction unit 110
- the signal processing system can reconstruct 3D information using the observed SAR images.
- the signal processing system 20 compares the SAR image to be analyzed with the simulated SAR image, thereby detecting a change occurring in the region in the SAR image to be analyzed (for example, the first change detection 130).
- the signal processing system can detect changes from the steady state using the complex correlation coefficient between SAR images.
- the detection means may detect changes by calculating the degree of similarity between the SAR image to be analyzed and the simulated SAR image. Further, the detecting means may use phase information indicated by the SAR image to be analyzed and phase information indicated by the simulated SAR image to calculate the degree of similarity. Also, the degree of similarity may be a coherence value.
- the signal processing system can detect changes from the steady state using the coherence value obtained from the set of the SAR image to be analyzed and the simulated SAR image.
- the generation means 21 generates a simulated SAR image for each of the shooting conditions of a plurality of SAR images to be analyzed, and the detection means, for each set of the SAR image to be analyzed and the simulated SAR image, A degree of similarity may be calculated over a plurality of sets, and a change may be detected using the plurality of degrees of similarity calculated.
- the signal processing system can detect changes from the steady state using multiple complex correlation coefficients obtained from multiple sets of SAR images to be analyzed and simulated SAR images.
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Description
[構成の説明]
以下、本発明の第1の実施形態を図面を参照して説明する。図4は、本発明の第1の実施形態の信号処理システムの構成例を示すブロック図である。


以下、本実施形態の信号処理システム100の模擬SAR 画像を生成する動作を図6を参照して説明する。図6は、第1の実施形態の信号処理システム100による信号処理の動作を示すフローチャートである。

本実施形態の信号処理システム100の3次元情報再構成部110は、蓄積された観測SAR 画像群を基に、解析対象とする領域の定常状態での各3次元位置における反射強度と位相の情報を有するデータ、すなわち3次元情報を再構成する。また、模擬SAR 画像生成部120は、解析対象とするSAR 画像(群)の撮影条件と再構成された3次元情報とを基に、模擬SAR 画像(群)を生成する。
[構成の説明]
次に、本発明の第2の実施形態を、図面を参照して説明する。図9は、本発明の第2の実施形態の信号処理システムの構成例を示すブロック図である。
以下、本実施形態の信号処理システム101の変化検知箇所を特定する動作を図11を参照して説明する。図11は、第2の実施形態の信号処理システム101による信号処理の動作を示すフローチャートである。

本実施形態の信号処理システム101の第1変化検知部130は、解析対象とするSAR 画像と、解析対象とするSAR 画像と同一の撮影条件で生成された模擬SAR 画像との相関を、位相の情報を用いて算出する。位相の情報を用いて算出された相関を参照することによって、利用者は、定常状態からの変化を容易に検知できる。また、第1変化検知部130が模擬SAR 画像と解析対象とするSAR 画像との相関を算出することによって、利用者は、レイオーバ領域に対しても頑健に変化を検知できる。
[構成の説明]
次に、本発明の第3の実施形態を、図面を参照して説明する。図13は、本発明の第3の実施形態の信号処理システムの構成例を示すブロック図である。
以下、本実施形態の信号処理システム102の変化検知箇所を特定する動作を図14を参照して説明する。図14は、第3の実施形態の信号処理システム102による信号処理の動作を示すフローチャートである。
本実施形態の信号処理システム102の第2変化検知部140は、解析対象とするSAR 画像と、解析対象とするSAR 画像に対応した模擬SAR 画像との組ごとに位相の情報を用いた相関処理を行い、それぞれの組ごとに算出された各値から得られる統計量そのもの、または統計量を閾値判定することによって変化の有無が判定された結果を出力する。統計量が利用されると、単一の相関の値の高低だけでなく典型値(例えば、平均値)からの各相関の差分も評価可能になるため、変化検知の頑健性が向上する。
12 主記憶部
13 通信部
14 補助記憶部
15 入力部
16 出力部
17 システムバス
20、100、101、102 信号処理システム
21 生成手段
110 3次元情報再構成部
120 模擬SAR画像生成部
130 第1変化検知部
140 第2変化検知部
200 SAR画像記憶部
Claims (9)
- 合成開口レーダ(SAR )によって領域が、撮影された観測SAR 画像を用いて再構成された定常状態での3次元位置における反射強度の情報と位相の情報とを有するデータである3次元情報と、解析対象とするSAR 画像の撮影条件とを用いて、前記解析対象とするSAR 画像の撮影条件に適した前記定常状態を示す複素画像である模擬SAR 画像を生成する生成手段を含む
ことを特徴とする信号処理システム。 - 前記観測SAR 画像を用いて前記3次元情報を算出する算出手段を含む
請求項1記載の信号処理システム。 - 前記解析対象とするSAR 画像と、前記模擬SAR 画像とを比較することによって、前記解析対象とするSAR 画像における領域に生じた変化を検知する検知手段を含む
請求項1または請求項2記載の信号処理システム。 - 前記検知手段は、前記解析対象とするSAR 画像と、前記模擬SAR 画像とが類似している程度を算出することによって前記変化を検知する
請求項3記載の信号処理システム。 - 前記検知手段は、前記解析対象とするSAR 画像が示す位相の情報と、前記模擬SAR 画像が示す位相の情報とを用いて、前記類似している程度を算出する
請求項4記載の信号処理システム。 - 前記類似している程度は、コヒーレンス値である
請求項5記載の信号処理システム。 - 前記生成手段は、
複数の前記解析対象とするSAR 画像の撮影条件各々に対して前記模擬SAR 画像を生成し、
前記検知手段は、
前記解析対象とするSAR 画像と、前記模擬SAR 画像との組ごとに、複数の組に亘って前記類似している程度をそれぞれ算出し、
算出された複数の前記類似している程度を用いて前記変化を検知する
請求項4から請求項6のうちのいずれか1項に記載の信号処理システム。 - 合成開口レーダ(SAR )によって領域が、撮影された観測SAR 画像を用いて再構成された定常状態での3次元位置における反射強度の情報と位相の情報とを有するデータである3次元情報と、解析対象とするSAR 画像の撮影条件とを用いて、前記解析対象とするSAR 画像の撮影条件に適した前記定常状態を示す複素画像である模擬SAR 画像を、コンピュータが生成する
ことを特徴とする信号処理方法。 - 合成開口レーダ(SAR )によって領域が、撮影された観測SAR 画像を用いて再構成された定常状態での3次元位置における反射強度の情報と位相の情報とを有するデータである3次元情報と、解析対象とするSAR 画像の撮影条件とを用いて、前記解析対象とするSAR 画像の撮影条件に適した前記定常状態を示す複素画像である模擬SAR 画像を生成する
信号処理プログラム
を記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/040046 WO2023073936A1 (ja) | 2021-10-29 | 2021-10-29 | 信号処理システムおよび信号処理方法 |
| EP21962477.2A EP4425215A1 (en) | 2021-10-29 | 2021-10-29 | Signal processing system and signal processing method |
| JP2023556041A JPWO2023073936A1 (ja) | 2021-10-29 | 2021-10-29 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/040046 WO2023073936A1 (ja) | 2021-10-29 | 2021-10-29 | 信号処理システムおよび信号処理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023073936A1 true WO2023073936A1 (ja) | 2023-05-04 |
Family
ID=86157662
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/040046 WO2023073936A1 (ja) | 2021-10-29 | 2021-10-29 | 信号処理システムおよび信号処理方法 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4425215A1 (ja) |
| JP (1) | JPWO2023073936A1 (ja) |
| WO (1) | WO2023073936A1 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008016153A1 (fr) | 2006-08-03 | 2008-02-07 | Pasco Corporation | procédé de prise en charge de contre-mesures pour une catastrophe |
| JP2008185375A (ja) * | 2007-01-29 | 2008-08-14 | Mitsubishi Electric Corp | Sar画像の3d形状算出装置及びsar画像の歪補正装置 |
| JP2009187440A (ja) * | 2008-02-08 | 2009-08-20 | Mitsubishi Space Software Kk | 観測画像補正装置、観測画像補正プログラムおよび観測画像補正方法 |
| JP2016057092A (ja) * | 2014-09-05 | 2016-04-21 | 国立研究開発法人情報通信研究機構 | Sar図からの立体地形図形成方法 |
| GB2553284A (en) | 2016-08-23 | 2018-03-07 | Thales Holdings Uk Plc | Multilook coherent change detection |
| EP3540462A1 (en) | 2018-03-14 | 2019-09-18 | Elta Systems Ltd. | Coherence change detection techniques |
| US10571560B2 (en) | 2015-09-21 | 2020-02-25 | Saab Ab | Detecting objects in images |
| CN112099006A (zh) * | 2020-09-15 | 2020-12-18 | 中山大学 | 一种合成孔径雷达相对定位误差校正方法、系统及装置 |
-
2021
- 2021-10-29 WO PCT/JP2021/040046 patent/WO2023073936A1/ja active Application Filing
- 2021-10-29 JP JP2023556041A patent/JPWO2023073936A1/ja active Pending
- 2021-10-29 EP EP21962477.2A patent/EP4425215A1/en active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008016153A1 (fr) | 2006-08-03 | 2008-02-07 | Pasco Corporation | procédé de prise en charge de contre-mesures pour une catastrophe |
| JP2008185375A (ja) * | 2007-01-29 | 2008-08-14 | Mitsubishi Electric Corp | Sar画像の3d形状算出装置及びsar画像の歪補正装置 |
| JP2009187440A (ja) * | 2008-02-08 | 2009-08-20 | Mitsubishi Space Software Kk | 観測画像補正装置、観測画像補正プログラムおよび観測画像補正方法 |
| JP2016057092A (ja) * | 2014-09-05 | 2016-04-21 | 国立研究開発法人情報通信研究機構 | Sar図からの立体地形図形成方法 |
| US10571560B2 (en) | 2015-09-21 | 2020-02-25 | Saab Ab | Detecting objects in images |
| GB2553284A (en) | 2016-08-23 | 2018-03-07 | Thales Holdings Uk Plc | Multilook coherent change detection |
| EP3540462A1 (en) | 2018-03-14 | 2019-09-18 | Elta Systems Ltd. | Coherence change detection techniques |
| CN112099006A (zh) * | 2020-09-15 | 2020-12-18 | 中山大学 | 一种合成孔径雷达相对定位误差校正方法、系统及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023073936A1 (ja) | 2023-05-04 |
| EP4425215A1 (en) | 2024-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9207318B2 (en) | Damage proxy map from interferometric synthetic aperture radar coherence | |
| Brunner et al. | Building height retrieval from VHR SAR imagery based on an iterative simulation and matching technique | |
| Ahn et al. | Efficient automated glacier surface velocity measurement from repeat images using multi-image/multichip and null exclusion feature tracking | |
| JP4129879B2 (ja) | 画像解析装置、画像解析方法及びプログラム | |
| KR20110120317A (ko) | 3d 포인트 클라우드 데이터를 2d 전자광학 영상 데이터로 등록 | |
| Pepe et al. | New advances of the extended minimum cost flow phase unwrapping algorithm for SBAS-DInSAR analysis at full spatial resolution | |
| JP2017215306A (ja) | 変位検出装置および変位検出方法 | |
| WO2008016153A1 (fr) | procédé de prise en charge de contre-mesures pour une catastrophe | |
| US11841421B2 (en) | Synthetic aperture radar image analysis system, synthetic aperture radar image analysis method, and synthetic aperture radar image analysis program | |
| Nota et al. | Improving UAV-SfM time-series accuracy by co-alignment and contributions of ground control or RTK positioning | |
| JP2021056008A (ja) | 地すべり領域検出装置及びプログラム | |
| Lei et al. | Detection of forest disturbance with spaceborne repeat-pass SAR interferometry | |
| Long et al. | Object detection research of SAR image using improved faster region-based convolutional neural network | |
| Zhang et al. | Reduction of atmospheric effects on InSAR observations through incorporation of GACOS and PCA into small baseline subset InSAR | |
| Hewitt et al. | LiDAR-Based map relative localization performance analysis for landing on Europa | |
| ESTOQUE et al. | < Original Papers> Validating ALOS PRISM DSM-derived surface feature height: Implications for urban volume estimation | |
| Chen et al. | A novel method for inverting coseismic 3D surface deformation using InSAR considering the weight influence of the spatial distribution of GNSS points | |
| Pham et al. | Sparsity optimization method for slow-moving landslides detection in satellite image time-series | |
| WO2023073936A1 (ja) | 信号処理システムおよび信号処理方法 | |
| Guillet et al. | Camera orientation, calibration and inverse perspective with uncertainties: a Bayesian method applied to area estimation from diverse photographs | |
| WO2023233656A1 (ja) | 信号処理装置および信号処理方法 | |
| Archambault et al. | Unsupervised learning of sea surface height interpolation from multi-variate simulated satellite observations | |
| US20210223389A1 (en) | Synthetic aperture radar signal analysis device, synthetic aperture radar signal analysis method, and synthetic aperture radar signal analysis program | |
| US20240077605A1 (en) | Change detection device and change detection method | |
| US11776148B1 (en) | Multi-view height estimation from satellite images |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21962477 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023556041 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2021962477 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021962477 Country of ref document: EP Effective date: 20240529 |