WO2023062665A1 - 支援システム、支援方法および支援プログラム - Google Patents
支援システム、支援方法および支援プログラム Download PDFInfo
- Publication number
- WO2023062665A1 WO2023062665A1 PCT/JP2021/037509 JP2021037509W WO2023062665A1 WO 2023062665 A1 WO2023062665 A1 WO 2023062665A1 JP 2021037509 W JP2021037509 W JP 2021037509W WO 2023062665 A1 WO2023062665 A1 WO 2023062665A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- cost function
- cost
- unit
- clustering
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/006—Indicating maintenance
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
Definitions
- the present invention relates to a support system, a support method, and a storage medium that stores a support program for assisting in grasping the intention of a user who operates a device.
- Patent Document 1 describes an intention feature quantity extraction device that extracts a feature quantity representing the intention of a subject.
- the device described in Patent Literature 1 extracts the weight of the explanatory variable learned based on the driving history of the subject as a feature quantity indicating the driving intention of the subject.
- an object of the present invention is to provide a support system, a support method, and a support program that can support the understanding of the user's intention estimated from the observation data of the device.
- the support system includes input means for receiving input of observation data observed accompanying operation of a device, and input of a cost function having factors of behavior intended by the operator of the device as explanatory variables;
- a learning means that generates a cost function and the weight of the explanatory variable of the generated cost function are extracted as feature values representing the operator's intentions, and the extracted feature values are extracted.
- a distribution map generating means for generating a distribution map in which information about the cost function is arranged at corresponding positions in a multidimensional space having explanatory variables as dimension axes.
- the support method receives an input of observation data observed accompanying the operation of a device, and an input of a cost function whose explanatory variables are the factors of the behavior intended by the operator of the device.
- a cost function is generated by inverse reinforcement learning using the method, the weight of the explanatory variable of the generated cost function is extracted as a feature value representing the operator's intention, and the explanatory variable is dimensioned according to the extracted feature value. It is characterized by generating a distribution map in which information about the cost function is arranged at corresponding positions on a multidimensional space as an axis.
- the support program provides a computer with an input of observation data observed accompanying the operation of a device, and an input of a cost function whose explanatory variables are the factors of the behavior intended by the operator of the device. Processing, learning processing to generate a cost function by inverse reinforcement learning using observed data, and extracting the weight of the explanatory variable of the generated cost function as a feature value representing the operator's intention, and extracting the extracted feature According to the quantity, a distribution map generation process is executed to generate a distribution map in which information about the cost function is arranged at a corresponding position in a multidimensional space having explanatory variables as dimension axes.
- FIG. 1 is a block diagram showing a configuration example of a first embodiment of a support system according to the present invention
- FIG. FIG. 4 is an explanatory diagram showing an example of observation data
- FIG. 5 is an explanatory diagram showing an example of learning processing
- FIG. 4 is an explanatory diagram showing an example of a distribution map
- It is explanatory drawing which shows the example which clustered each cost function.
- 4 is a flow chart showing an operation example of the support system of the first embodiment
- FIG. 4 is a block diagram showing a configuration example of a second embodiment of a support system according to the present invention
- FIG. 10 is an explanatory diagram showing an example of processing for changing feature amounts; 9 is a flow chart showing an operation example of the support system of the second embodiment; 1 is a block diagram showing an overview of a support system according to the invention; FIG. 1 is a schematic block diagram showing a configuration of a computer according to at least one embodiment; FIG.
- FIG. 1 is a block diagram showing a configuration example of a first embodiment of a support system according to the present invention.
- the support system 100 of this embodiment includes a storage unit 10, an input unit 20, a learning unit 30, a distribution diagram generation unit 40, a clustering unit 50, an identification unit 60, a scenario generation unit 70, and an output unit 80. and
- the storage unit 10 stores various types of information used for processing by the support system 100 of this embodiment.
- the storage unit 10 may store, for example, data used for learning by the learning unit 30, which will be described later, and a cost function generated as a result of learning.
- the storage unit 10 may store scenarios generated by the scenario generation unit 70 .
- the storage unit 10 is realized by, for example, a magnetic disk or the like.
- the input unit 20 receives input of information used for learning by the learning unit 30, which will be described later. Specifically, the input unit 20 receives input of data observed accompanying the operation of the device (hereinafter referred to as observation data).
- the observation data is not limited to the data observed as a result of operating the equipment, but also the data indicating the conditions under which the equipment is operated, the data indicating the conditions and events that led to the operation of the equipment, and the It includes data indicating information set in the device. For example, if the device is a vehicle, the observation data is driving data observed accompanying the driving of the vehicle.
- the method of obtaining the operation data and the contents of the operation data are arbitrary.
- the driving data for example, various data acquired by GPS (Global Positioning System) may be used.
- GPS Global Positioning System
- an image is captured while the vehicle is being driven (front image, rear image, etc.)
- various types of information that can be extracted from the image may be used as the driving data.
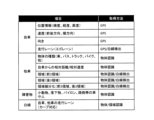
- FIG. 2 is an explanatory diagram showing an example of observation data.
- FIG. 2 illustrates driving data as a specific example of observation data.
- items of the own vehicle obtained from GPS include position information (latitude, longitude, altitude), speed (front-rear direction, lateral direction), direction, driving lane (ego lane), and the like.
- Items of other vehicles obtained by recognizing objects such as images include types of objects (cars, buses, trucks, motorcycles, etc.), relative distances and relative velocities to the own vehicle, obstacles, and the like.
- white line detection techniques may be used instead of or in conjunction with object recognition.
- the input unit 20 receives input of observation data, but the learning unit 30, which will be described later, may generate observation data from various types of input information.
- the input unit 20 accepts input of a cost function whose explanatory variable is the factor of the action intended by the operator of the device.
- This explanatory variable can be derived from observation data, and in the case of driving data, corresponds to each item illustrated in FIG. 2, for example.
- This explanatory variable is selected in advance by an engineer or the like, and a cost function using this explanatory variable is also predetermined.
- An example of the cost function is a function represented by a linear regression formula for each explanatory variable.
- the input unit 20 may also receive an input of the cost function and the constraint conditions of the cost function.
- the learning unit 30 learns the cost function based on observation data. More specifically, the learning unit 30 learns a cost function using factors of behavior intended by the operator as explanatory variables by inverse reinforcement learning using observation data. Note that the method by which the learning unit 30 performs inverse reinforcement learning is arbitrary.
- the learning unit 30 may generate the cost function using the inverse reinforcement learning method described in Patent Document 1, for example. For example, when the device is a vehicle, the learning unit 30 generates a cost function through inverse reinforcement learning using driving data as described above.
- the learning unit 30 may learn a cost function based on individual observation data, or may generate a cost function by inverse reinforcement learning using observation data groups classified by similar attributes or situations. good. Note that the learning unit 30 may generate the cost function using only one piece of observation data in which an attribute or situation is specified.
- the learning unit 30 may learn a cost function for each driving data group classified according to surrounding driving conditions (for example, cut-in, cut-out, etc.). By using the classified observation data or the observation data in which attributes or situations are specified, it becomes possible to easily grasp the operator's intention represented by the cost function.
- FIG. 3 is an explanatory diagram showing an example of learning processing.
- three observation data groups (driving data A, driving data B, and driving data C) are generated from driving data 101 obtained from actual driving, and cost functions 102, It shows that cost function 103 and cost function 104 have been generated.
- each cost function includes fuel consumption, inter-vehicle distance, field of view, road shape, and acceleration as explanatory variables, and the explanatory variable enclosed in a double frame has the largest weight. .
- the driver's intention changes for each driving data.
- the cost function 102 generated based on the driving data A indicates that the driver's intention is to focus on fuel efficiency
- the cost functions 103 and 104 indicate that the driver's intention is to focus on the field of view. . This makes it possible to grasp the driver's intention represented by each cost function.
- the distribution diagram generation unit 40 generates a distribution diagram in which the information on the generated cost function is arranged in a multidimensional space. Specifically, the distribution diagram generation unit 40 extracts the weight of the explanatory variable of the generated cost function as a feature quantity representing the intention of the operator. Then, the distribution diagram generation unit 40 generates a distribution diagram in which the information on the cost function is arranged at the position corresponding to the feature amount in the multidimensional space with the explanatory variable as the dimension axis, according to the extracted feature amount. .
- the distribution diagram generator 40 may generate a distribution diagram in which the cost functions themselves are arranged. Further, for example, when the cost function is generated using data classified according to attributes and situations, the distribution diagram generation unit 40 generates a distribution diagram in which information indicating attributes and situations is arranged as information about the cost function. may be created.
- the information about the cost function is not limited to the contents described above.
- the identification number that identifies the cost function the illustrated cost function illustrated in FIG. may be created.
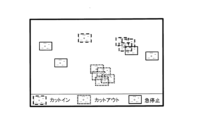
- FIG. 4 is an explanatory diagram showing an example of a distribution map.
- the distribution chart illustrated in FIG. 4 is a distribution chart in which the illustrated cost functions illustrated in FIG. 3 are arranged as information related to the cost functions. Specifically, in the example shown in FIG. 4, the cost functions indicating the driver's intention in the cut-out situation are arranged together, and the cost function indicating the driver's intention in the cut-in situation is It is shown that the cost function, which is clustered and indicates the driver's intention in a sudden stop situation, is distributed.
- the distribution diagram illustrated in FIG. 4 represents the outer frame of the information on the cost function in a manner that allows each situation to be identified.
- label information indicating the contents of each situation may be arranged close to the cost function.
- the clustering unit 50 clusters each cost function using information about the arranged cost functions. Specifically, the clustering unit 50 clusters each cost function based on the feature amount of the arranged cost function.
- the method by which the clustering unit 50 groups cost functions is not particularly limited, and any clustering method (non-hierarchical clustering, such as k-means) may be used.
- the clustering unit 50 may reflect the clustering results in the distribution map.
- the clustering unit 50 clusters the clustered cost function group by, for example, surrounding the perimeter of the information on the clustered cost functions, or by reflecting the straight lines and planes that separate the regions of the multidimensional space in the distribution map. You may enable it to specify.
- the distribution diagram generation unit 40 labels the conditions under which the observation data from which each cost function was generated was acquired, so that the user can grasp the intended content of the boundary surface reflected by the clustering unit 50. easier to do.
- FIG. 5 is an explanatory diagram showing an example of clustering each cost function in the distribution diagram illustrated in FIG. Specifically, FIG. 5 shows an example of a distribution diagram in which clustered cost functions are separated by straight lines. The example shown in FIG. 5, for example, shows that the cost function 105 indicative of driver intent in a cut-out situation exhibits different characteristics than the cost function indicative of driver intent in a similar situation.
- the identifying unit 60 identifies a predetermined characteristic cost function based on the clustering results. Specifically, the identifying unit 60 identifies typical cost functions and rare cost functions for each situation from the clustering results.
- the identifying unit 60 may, for example, identify the center of each cluster as a typical cost function. Specifically, for example, when a cluster includes a predetermined ratio or more of cost functions indicating similar situations, the specifying unit 60 selects the cost function corresponding to the center of the cluster as the user's typical cost function in that situation. It may be specified as a cost function that indicates intent. On the other hand, if the ratio of cost functions indicating a certain situation among the cost functions included in the cluster is less than a predetermined ratio, the specifying unit 60 changes the cost function to a cost function indicating the user's rare intention in that situation. may be specified.
- the identifying unit 60 selects which cluster among the cost functions included in the clusters whose classified number is less than a predetermined threshold, and the cost functions generated based on the manually created scenario (Functional Scenario).
- a cost function that does not belong to either may be identified as a cost function that indicates the user's rare intent.
- the identifying unit 60 may identify a cost function close to the boundary plane as illustrated in FIG. 5 as a cost function indicating the user's rare intention. That is, the identifying unit 60 may identify a cost function arranged within a predetermined distance from the cluster boundary as the cost function indicating the user's rare intention.
- the cost function is generated by inverse reinforcement learning using observational data groups classified by attribute or situation.
- the identifying unit 60 selects a cost function that is not included in the largest proportion of clusters among the cost functions created from the observation data group classified by the same attribute or situation as a cost indicating the user's rare intention. May be specified as a function.
- the specifying unit 60 may specify a cost function included in a cluster whose number included in the classified clusters is equal to or less than a predetermined number, as the cost function indicating the rare intention of the user.
- the cost functions specified by the specifying unit 60 are not limited to rare cost functions and typical cost functions.
- the identifying unit 60 may, for example, identify a cost function that meets predetermined conditions.
- the scenario generation unit 70 generates a device scenario using the specified cost function.
- the scenario of the device means, for example, the operation of the device estimated using the specified cost function, and is time-series data of the operation of the device that operates according to the user's operation.
- the scenario generation unit 70 may apply the identified cost function to the simulator to generate the device scenario, for example.
- the support system of this embodiment can be called a scenario creation support system.
- the output unit 80 outputs the distribution map generated by the distribution map generating unit 40 and the scenario generated by the scenario generating unit 70.
- the output unit 80 may, for example, display the distribution map on a display device (not shown), or store the generated scenario in the storage unit 10 .
- the input unit 20, the learning unit 30, the distribution map generation unit 40, the clustering unit 50, the identification unit 60, the scenario generation unit 70, and the output unit 80 are computer processors that operate according to a program (support program).
- a program support program
- CPU Central Processing Unit
- GPU Graphics Processing Unit
- the program is stored in the storage unit 10, the processor reads the program, and according to the program, the input unit 20, the learning unit 30, the distribution diagram generation unit 40, the clustering unit 50, the identification unit 60, the scenario generation unit 70, And it may operate as the output unit 80 .
- each function of the input unit 20, the learning unit 30, the distribution diagram generation unit 40, the clustering unit 50, the identification unit 60, the scenario generation unit 70, and the output unit 80 is provided in SaaS (Software as a Service) format. good too.
- the input unit 20, the learning unit 30, the distribution diagram generation unit 40, the clustering unit 50, the identification unit 60, the scenario generation unit 70, and the output unit 80 are each realized by dedicated hardware.
- part or all of each component of each device may be implemented by a general-purpose or dedicated circuit (circuitry), processor, etc., or a combination thereof. These may be composed of a single chip, or may be composed of multiple chips connected via a bus. A part or all of each component of each device may be implemented by a combination of the above-described circuits and the like and programs.
- the plurality of information processing devices, circuits, etc. may be centrally arranged or distributed.
- the information processing device, circuits, and the like may be implemented as a form in which each is connected via a communication network, such as a client-server system, a cloud computing system, or the like.
- FIG. 6 is a flow chart showing an operation example of the support system 100 of the first embodiment.
- the input unit 20 receives input of observation data and a cost function (step S11).
- the learning unit 30 generates a cost function by inverse reinforcement learning using observation data (step S12).
- the distribution diagram generation unit 40 extracts the weight of the explanatory variable of the generated cost function as a feature amount (step S13). Then, the distribution diagram generation unit 40 generates a distribution diagram in which information about the cost function is arranged at corresponding positions in the multidimensional space according to the extracted feature amount (step S14).
- the input unit 20 receives input of observation data and a cost function
- the learning unit 30 generates a cost function through inverse reinforcement learning using the observation data.
- the distribution diagram generation unit 40 extracts the weight of the explanatory variable of the generated cost function as a feature amount, and arranges information about the cost function at a corresponding position in the multidimensional space according to the extracted feature amount.
- FIG. 7 is a block diagram showing a configuration example of a second embodiment of a support system according to the present invention.
- the support system 200 of this embodiment includes a storage unit 10, an input unit 20, a learning unit 30, a distribution diagram generation unit 40, a clustering unit 50, an identification unit 60, a feature amount change unit 110, and a scenario generation unit.
- a unit 70 and an output unit 80 are provided.
- the support system 200 of the present embodiment differs from the first embodiment in that it further includes a feature amount changing unit 110 .
- Other configurations are the same as those of the first embodiment.
- the feature amount changing unit 110 changes the feature amount of the cost function specified by the specifying unit 60 .
- the feature quantity changing unit 110 changes the weight of each explanatory variable.
- the feature amount changing unit 110 may change, for example, weights (feature amounts) of explanatory variables other than the focused (emphasized) explanatory variable.
- feature amount changing section 110 may normalize the weight and change the feature amount other than the fuel consumption.
- the scenario generation unit 70 After that, the scenario generation unit 70 generates a device scenario using the cost function with the changed feature amount, which is the same as in the first embodiment. That is, the scenario generation unit 70 generates a device scenario using the cost function with the changed feature amount. In this way, it is possible to create a desired scenario from the cost function that indicates the intent of the operator of interest.
- FIG. 8 is an explanatory diagram showing an example of processing for changing feature amounts.
- the specifying unit 60 specifies a cost function that indicates the operator's intention to place importance on fuel consumption.
- a rare case cost function 105 may be identified.
- the feature amount changing unit 110 sets the weight of the fuel consumption to 1 by normalization, and appropriately changes the weights of the other explanatory variables.
- the feature amount changing unit 110 can change the weight in any manner, and examples thereof include a constant ratio, a constant interval, and up to the vicinity of the boundary value.
- the scenario generation unit 70 generates a scenario using the changed cost function. For example, by changing the feature quantity of the cost function for rare cases, it is possible to create many scenarios assuming rare cases.
- the input unit 20, the learning unit 30, the distribution map generation unit 40, the clustering unit 50, the identification unit 60, the feature amount change unit 110, the scenario generation unit 70, and the output unit 80 are programs (support programs ) by a computer processor operating in accordance with
- FIG. 9 is a flow chart showing an operation example of the support system 200 of the second embodiment.
- the processing from learning the cost function based on the observed data, extracting the feature amount, and generating the distribution map is the same as the processing from step S11 to step S14 illustrated in FIG.
- the clustering unit 50 clusters the cost functions based on the features of the arranged cost functions (step S21).
- the identifying unit 60 identifies a predetermined characteristic cost function based on the clustering result (step S22).
- the feature amount changing unit 110 changes the specified feature amount of the cost function (step S23).
- the scenario generation unit 70 generates a device scenario using the cost function with the changed feature amount (step S24).
- the output unit 80 outputs the generated scenario (step S25).
- the feature amount changing unit 110 changes the feature amount of the cost function specified by the specifying unit 60
- the scenario generation unit 70 changes the feature Generating equipment scenarios with the modified cost function. Therefore, in addition to the effects of the first embodiment, it is possible to create many scenarios assuming various cases based on the feature amount of interest.
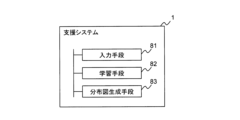
- FIG. 10 is a block diagram showing an overview of the support system according to the invention.
- the support system 1 according to the present invention inputs observation data observed accompanying the operation of equipment (for example, driving a vehicle), and inputs the factors of the behavior intended by the operator of the equipment (for example, the driver).
- An input means 81 (for example, an input unit 20) that receives an input of a cost function as an explanatory variable
- a learning means 82 (for example, a learning unit 30) that generates a cost function by inverse reinforcement learning using observation data, and a generation
- the weight of the explanatory variable of the obtained cost function is extracted as a feature quantity representing the intention of the operator, and the cost function is placed at the corresponding position in the multidimensional space with the explanatory variable as the dimension axis according to the extracted feature quantity.
- a distribution map generating means 83 (for example, the distribution map generating unit 40) for generating a distribution map in which information relating to is arranged.
- the support system 1 also includes clustering means (for example, a clustering unit 50) for clustering the arranged cost functions based on the feature amount of the cost functions, and a predetermined characteristic cost based on the clustering results.
- clustering means for example, a clustering unit 50
- a specifying means for example, the specifying unit 60
- the identifying means may identify a cost function included in a cluster whose classified number is less than a predetermined threshold, or a cost function that does not belong to any cluster. Such a configuration allows identifying cost functions that indicate rare intent.
- the identifying means may identify a cost function arranged within a predetermined distance from the cluster boundary. With such a configuration, rare cost functions away from the cluster center can be identified even if the cost functions exist within the same cluster.
- the learning means 82 may generate a cost function through inverse reinforcement learning using observation data groups classified by attribute or situation. Then, the identification means is a cost function that is not included in the largest proportion of the clusters among the cost functions created from the observation data group classified by the same attribute or situation, or the number included in the classified clusters is A cost function included in a predetermined number or less of clusters may be specified. With such a configuration, a cost function can be identified that indicates rare intent for each attribute or situation.
- the identifying means may identify a cost function corresponding to the center of the cluster. Such an arrangement makes it possible to specify a typical cost function.
- the cost function may be defined by a linear regression formula of explanatory variables.
- the support system 1 may also include scenario generation means (for example, the scenario generation unit 70) that generates a device scenario using the specified cost function.
- scenario generation means for example, the scenario generation unit 70
- the support system 1 may also include scenario generation means (for example, the scenario generation unit 70) that generates a device scenario using the specified cost function.
- the support system 1 may include feature amount changing means (for example, feature amount changing unit 110) that changes the feature amount of the cost function.
- the scenario generating means may generate the scenario of the device using the cost function with the changed feature amount.
- FIG. 11 is a schematic block diagram showing the configuration of a computer according to at least one embodiment.
- a computer 1000 comprises a processor 1001 , a main storage device 1002 , an auxiliary storage device 1003 and an interface 1004 .
- the support system 1 described above is implemented in a computer 1000.
- the operation of each processing unit described above is stored in the auxiliary storage device 1003 in the form of a program (support program).
- the processor 1001 reads out the program from the auxiliary storage device 1003, develops it in the main storage device 1002, and executes the above processing according to the program.
- the secondary storage device 1003 is an example of a non-transitory tangible medium.
- Other examples of non-transitory tangible media include magnetic disks, magneto-optical disks, CD-ROMs (Compact Disc Read-only memory), DVD-ROMs (Read-only memory), connected via interface 1004, A semiconductor memory etc. are mentioned.
- the computer 1000 receiving the distribution may develop the program in the main storage device 1002 and execute the above process.
- the program may be for realizing part of the functions described above.
- the program may be a so-called difference file (difference program) that implements the above-described functions in combination with another program already stored in the auxiliary storage device 1003 .
- Appendix 1 an input means for receiving input of observation data observed accompanying the operation of the device and input of a cost function whose explanatory variables are factors of behavior intended by the operator of the device; learning means for generating the cost function by inverse reinforcement learning using the observed data; The weight of the explanatory variable of the generated cost function is extracted as a feature quantity representing the intention of the operator, and corresponding to the extracted feature quantity in a multidimensional space with the explanatory variable as a dimension axis.
- a distribution map generating means for generating a distribution map in which the information related to the cost function is arranged at positions.
- Appendix 4 The support system according to Appendix 2 or Appendix 3, wherein the identifying means identifies cost functions arranged within a predetermined distance from the cluster boundary.
- the learning means generates a cost function by inverse reinforcement learning using an observation data group classified by attribute or situation,
- the identification means predetermines a cost function that is not included in the largest proportion of clusters, or the number of cost functions that are included in the classified clusters, among the cost functions created from the observation data group classified by the same attribute or situation. 5.
- Appendix 6 The support system according to Appendix 2, wherein the identifying means identifies a cost function corresponding to the center of the cluster.
- Appendix 7 The support system according to any one of Appendices 1 to 6, wherein the cost function is defined by a linear regression equation of explanatory variables.
- Appendix 8 The support system according to any one of Appendices 1 to 7, comprising scenario generation means for generating a scenario of the device using the specified cost function.
- Appendix 9 A feature amount changing means for changing the feature amount of the cost function, 9.
- a support method characterized by generating a distribution map in which information about the cost function is arranged at positions.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Data Mining & Analysis (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Artificial Intelligence (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
- Image Analysis (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023554097A JP7632675B2 (ja) | 2021-10-11 | 2021-10-11 | 支援システム、支援方法および支援プログラム |
| US18/692,480 US20240395075A1 (en) | 2021-10-11 | 2021-10-11 | Support system, support method, and support program |
| PCT/JP2021/037509 WO2023062665A1 (ja) | 2021-10-11 | 2021-10-11 | 支援システム、支援方法および支援プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/037509 WO2023062665A1 (ja) | 2021-10-11 | 2021-10-11 | 支援システム、支援方法および支援プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023062665A1 true WO2023062665A1 (ja) | 2023-04-20 |
Family
ID=85987632
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/037509 Ceased WO2023062665A1 (ja) | 2021-10-11 | 2021-10-11 | 支援システム、支援方法および支援プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20240395075A1 (https=) |
| JP (1) | JP7632675B2 (https=) |
| WO (1) | WO2023062665A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021134155B3 (de) * | 2021-12-21 | 2023-02-09 | Cariad Se | Verfahren und Prozessorschaltung zur Verbrauchsoptimierung von vollautomatisierten oder teilautomatisierten Fahrmanövern eines Kraftfahrzeugs sowie entsprechend ausgestattetes Kraftfahrzeug und System |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021130916A1 (ja) * | 2019-12-25 | 2021-07-01 | 日本電気株式会社 | 意図特徴量抽出装置、学習装置、方法およびプログラム |
-
2021
- 2021-10-11 US US18/692,480 patent/US20240395075A1/en active Pending
- 2021-10-11 WO PCT/JP2021/037509 patent/WO2023062665A1/ja not_active Ceased
- 2021-10-11 JP JP2023554097A patent/JP7632675B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021130916A1 (ja) * | 2019-12-25 | 2021-07-01 | 日本電気株式会社 | 意図特徴量抽出装置、学習装置、方法およびプログラム |
Non-Patent Citations (2)
| Title |
|---|
| IMAI, TAKUJI: "Using inverse reinforcement learning for imitation learning that understands the intentions of experts, NEC goes from a single decision-making problem to practical use.", NIKKEI ROBOTICS, no. 51, 1 October 2019 (2019-10-01), pages 22 - 26, XP009545275, ISSN: 2189-5783 * |
| ROSBACH SASCHA; JAMES VINIT; GROSJOHANN SIMON; HOMOCEANU SILVIU; ROTH STEFAN: "Driving with Style: Inverse Reinforcement Learning in General-Purpose Planning for Automated Driving", 2019 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS (IROS), IEEE, 3 November 2019 (2019-11-03), pages 2658 - 2665, XP033695776, DOI: 10.1109/IROS40897.2019.8968205 * |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240395075A1 (en) | 2024-11-28 |
| JPWO2023062665A1 (https=) | 2023-04-20 |
| JP7632675B2 (ja) | 2025-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN116529784B (zh) | 用于增加激光雷达数据的方法和系统 | |
| US20220048536A1 (en) | Method and device for testing a driver assistance system | |
| CN110502852B (zh) | 一种自动驾驶仿真测试场景的生成方法及生成系统 | |
| CN111488427B (zh) | 车辆交互方法、车辆交互系统、计算设备及存储介质 | |
| JP2025503714A (ja) | センサデータを自動的にアノテーションする方法およびシステム | |
| CN115017050A (zh) | 自动驾驶的测试场景生成系统及方法 | |
| JPWO2020129225A1 (ja) | 航海支援方法、航海支援装置および航海支援プログラム | |
| CN112269849A (zh) | 一种三维地图显示方法、系统、电子设备及存储介质 | |
| JP2023165587A (ja) | イメージセグメンテーションモデル学習方法およびシステム | |
| JP7632675B2 (ja) | 支援システム、支援方法および支援プログラム | |
| CN112749602A (zh) | 目标查询方法、装置、设备及存储介质 | |
| CN113946395A (zh) | 车机数据渲染方法、装置、电子设备以及存储介质 | |
| WO2020115903A1 (ja) | 学習装置、学習方法、および学習プログラム | |
| CN118068721A (zh) | 车辆仿真系统及使用其的智能驾驶仿真测试方法 | |
| CN114792421A (zh) | 一种面向复杂交通场景的字符识别方法、装置、设备和介质 | |
| CN115129594A (zh) | 测试场景处理方法、装置、电子设备和存储介质 | |
| CN109784129A (zh) | 信息输出方法和装置 | |
| US20230234603A1 (en) | Information processing system, information processing method, and program | |
| CN112434585A (zh) | 一种车道线的虚实识别方法、系统、电子设备及存储介质 | |
| CN118937949A (zh) | 用于车载芯片的性能评估方法、设备、介质和程序产品 | |
| CN118606169A (zh) | 场景泛化方法、场景泛化装置以及计算机存储介质 | |
| CN118568482A (zh) | 模型训练的方法、装置及存储介质 | |
| US12189033B2 (en) | Modeling foliage in a synthetic environment | |
| WO2022045001A1 (ja) | 走行試験パタン作成装置および方法 | |
| JP7837486B1 (ja) | 学習装置、識別装置、学習方法及び学習プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21960529 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023554097 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18692480 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21960529 Country of ref document: EP Kind code of ref document: A1 |