WO2022259665A1 - Procédé de positionnement, programme, et système de positionnement - Google Patents
Procédé de positionnement, programme, et système de positionnement Download PDFInfo
- Publication number
- WO2022259665A1 WO2022259665A1 PCT/JP2022/010615 JP2022010615W WO2022259665A1 WO 2022259665 A1 WO2022259665 A1 WO 2022259665A1 JP 2022010615 W JP2022010615 W JP 2022010615W WO 2022259665 A1 WO2022259665 A1 WO 2022259665A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- scanner
- value
- average value
- scanners
- rssi
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 96
- 230000002159 abnormal effect Effects 0.000 claims abstract description 95
- 238000004891 communication Methods 0.000 description 38
- 238000012986 modification Methods 0.000 description 19
- 230000004048 modification Effects 0.000 description 19
- 238000012545 processing Methods 0.000 description 19
- 230000015654 memory Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 238000005259 measurement Methods 0.000 description 8
- 239000000284 extract Substances 0.000 description 4
- 230000010354 integration Effects 0.000 description 3
- 238000010295 mobile communication Methods 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
Definitions
- the present disclosure relates generally to positioning methods, programs and positioning systems, and more particularly to positioning methods, programs and positioning systems for determining the position of a beacon terminal.
- the location detection system described in Patent Document 1 has a predetermined area in which the location of the mobile communication device (beacon terminal) can be detected. Therefore, the range of radio wave intensity (range from the lower limit to the upper limit) at the reception point of the reference signal wirelessly communicated between the mobile communication device and the fixed communication device is determined theoretically. Therefore, the administrator of the position detection system presets a range from a value obtained by subtracting a margin value from the lower limit of the range of theoretical values of radio wave intensity to a value obtained by adding a margin value to the upper limit as an effective range.
- the position of the mobile communication device is calculated by excluding fixed communication devices whose radio wave intensity becomes an abnormal value due to the influence of multipath or the like.
- An object of the present disclosure is to provide a positioning method, a program, and a positioning system that can improve the positioning accuracy of beacon terminals.
- a positioning method is a positioning method for determining the position of the beacon terminal based on the RSSI of the beacon signal transmitted from the beacon terminal.
- the positioning method includes obtaining an RSSI of the beacon signal at each of a plurality of scanners receiving the beacon signal. Further, the positioning method includes a difference between an instantaneous RSSI value of a target scanner among the plurality of scanners at a predetermined point in time and an average RSSI value of a predetermined target scanner among the plurality of scanners over a predetermined period. is a value outside the predetermined range, a determination step of determining that the instantaneous value of the RSSI of the scanner of interest at the predetermined time point is an abnormal value. Further, the positioning method includes the step of obtaining the position of the beacon terminal based on two or more RSSIs excluding the RSSI determined to be the abnormal value in the determining step.
- a positioning method is a positioning method for determining the position of the beacon terminal based on the RSSI of the beacon signal transmitted from the beacon terminal.
- the positioning method includes obtaining an RSSI of the beacon signal at each of a plurality of scanners receiving the beacon signal. Further, in the positioning method, when all of a plurality of conditions including a first condition, a second condition, and a third condition are satisfied, the instantaneous value of the RSSI at a predetermined point in time of the scanner of interest among the plurality of scanners is an abnormal value. It includes a determination step of determining that Further, the positioning method includes the step of obtaining the position of the beacon terminal based on two or more RSSIs excluding the RSSI determined to be the abnormal value in the determining step.
- the first condition is that a value obtained by subtracting a first average value of a predetermined target scanner among the plurality of scanners from the instantaneous value of the RSSI of the target scanner at the predetermined time is greater than a threshold. be.
- the first average value is an average RSSI value for a first period before or including the predetermined time point.
- the second condition is that the first average value for the scanner of interest is smaller than a second average value, which is the average value of RSSI in a second period preceding the first period.
- the third condition is that the first average value is greater than the second average value with respect to the scanner having the largest first average value among the plurality of scanners.
- a program according to one aspect of the present disclosure is a program for causing one or more processors to execute the positioning method according to any one of the above aspects.
- a positioning system is a positioning system that determines the position of a beacon terminal based on the RSSI of a beacon signal transmitted from the beacon terminal.
- the positioning system includes an acquisition unit that acquires the RSSI of the beacon signal in each of a plurality of scanners that receive the beacon signal. Further, the positioning system is configured to calculate a difference between an instantaneous RSSI value of a target scanner among the plurality of scanners at a predetermined point in time and an average RSSI value of a predetermined target scanner among the plurality of scanners over a predetermined period of time. is outside a predetermined range, the determination unit determines that the instantaneous value of the RSSI of the scanner of interest at the predetermined time point is an abnormal value. Further, the positioning system includes a positioning unit that obtains the position of the beacon terminal based on two or more RSSIs excluding the RSSI determined to be the abnormal value by the determining unit.
- a positioning system is a positioning system that determines the position of the beacon terminal based on the RSSI of the beacon signal transmitted from the beacon terminal.
- the positioning system includes an acquisition unit that acquires the RSSI of the beacon signal in each of a plurality of scanners that receive the beacon signal. Further, the positioning system, when all of a plurality of conditions including a first condition, a second condition, and a third condition are satisfied, sets the instantaneous value of the RSSI of the scanner of interest at a predetermined time point among the plurality of scanners to an abnormal value. It includes a determination unit that determines.
- the positioning system includes a positioning unit that obtains the position of the beacon terminal based on two or more RSSIs excluding the RSSI determined to be the abnormal value by the determining unit.
- the first condition is that a value obtained by subtracting a first average value of a predetermined target scanner among the plurality of scanners from the instantaneous value of the RSSI of the target scanner at the predetermined time is greater than a threshold. be.
- the first average value is an average RSSI value for a first period before or including the predetermined time point.
- the second condition is that the first average value for the scanner of interest is smaller than a second average value, which is the average value of RSSI in a second period preceding the first period.
- the third condition is that the first average value is greater than the second average value with respect to the scanner having the largest first average value among the plurality of scanners.
- FIG. 1 is a block diagram of a system for implementing a positioning method according to Embodiment 1.
- FIG. FIG. 2 is a schematic plan view of a space to which the above positioning method is applied.
- FIG. 3 is a graph showing RSSI measurement results in the above positioning method.
- FIG. 4 is a flow chart showing the positioning method of the same.
- FIG. 5 is a graph showing RSSI measurement results in the positioning method according to the second embodiment.
- FIG. 6 is a flow chart showing the positioning method of the same.
- FIGS. 1 and 2 assume a facility in which a plurality of scanners 4 are installed. A plurality of scanners 4 are installed, for example, on the ceiling of the facility. In FIG. 2, the positions of the scanners 4 are indicated by black circles.
- Facilities include, for example, office buildings, factories, commercial complexes, libraries, art galleries, museums, amusement facilities, theme parks, parks, airports, train stations, ballparks, hotels, hospitals and residences.
- the facility may be, for example, a mobile object such as a ship or a railway vehicle.
- a plurality of users who use the facility each carry a beacon terminal 5.
- the positioning system 1 is used with at least one beacon terminal 5 and multiple scanners 4 .
- Beacon terminal 5 is a communication terminal like a smart phone, for example.
- the beacon terminal 5 is not limited to a smart phone, and may be a tablet-type mobile terminal or a terminal dedicated to the positioning system 1 such as a tag.
- the beacon terminal 5 may be owned by the user or may be borrowed. In FIG. 1, only one beacon terminal 5 is illustrated.
- Identification information is assigned to each beacon terminal 5, and the positioning system 1 distinguishes between a plurality of beacon terminals 5 based on the identification information.
- the beacon terminal 5 transmits a beacon signal.
- Each of the multiple scanners 4 receives the beacon signal and measures the received signal strength indication (RSSI). Basically, the greater the distance between the beacon terminal 5 and the scanner 4, the smaller the RSSI.
- the positioning system 1 obtains the distance between each of the plurality of scanners 4 and the beacon terminal 5 based on the RSSI of each of the plurality of scanners 4 , thereby obtaining the position of the beacon terminal 5 .
- RSSI may vary due to interference and reflection of radio waves as beacon signals. For example, even though a certain scanner 4 is far away from the beacon terminal 5, the RSSI may momentarily increase. Alternatively, even though a certain scanner 4 is sufficiently close to the beacon terminal 5, the RSSI may momentarily decrease. Variation in RSSI can cause a decrease in positioning accuracy of the beacon terminal 5 . Therefore, the positioning system 1 of the present embodiment determines the instantaneously increased or decreased RSSI value as an abnormal value, and obtains the position of the beacon terminal 5 based on two or more RSSIs excluding the RSSI determined to be an abnormal value. . Thereby, the positioning accuracy can be improved.
- the positioning system 1 of this embodiment is a positioning system that obtains the position of the beacon terminal 5 based on the RSSI of the beacon signal transmitted from the beacon terminal 5 .
- the positioning system 1 includes an acquisition unit 21 that acquires the RSSI of the beacon signal in each of the multiple scanners 4 that receive the beacon signal. Furthermore, the positioning system 1 obtains the instantaneous value of the RSSI at a predetermined point in time for the scanner 4 of interest among the plurality of scanners 4 and the average RSSI value for a predetermined period of time for a predetermined target scanner among the plurality of scanners 4.
- a judgment unit 22 is provided for judging that the instantaneous value of the RSSI of the scanner 4 of interest at a prescribed point in time is an abnormal value if the difference is out of the prescribed range.
- the positioning system 1 includes a positioning unit 23 that obtains the position of the beacon terminal 5 based on two or more RSSIs excluding the RSSI determined to be an abnormal value by the determination unit 22 .
- the positioning method of this embodiment is realized by the positioning system 1.
- the positioning method is a positioning method for obtaining the position of the beacon terminal 5 based on the RSSI of the beacon signal transmitted from the beacon terminal 5 .
- the positioning method includes obtaining the RSSI of the beacon signal at each of the plurality of scanners 4 that receive the beacon signal. Furthermore, the positioning method is based on the difference between the instantaneous value of the RSSI at a predetermined point in time for the scanner 4 of interest among the plurality of scanners 4 and the average value of the RSSI for a predetermined period of time for a predetermined target scanner among the plurality of scanners 4.
- the positioning method includes a step of determining the position of the beacon terminal 5 based on two or more RSSIs excluding the RSSI determined to be an abnormal value in the determining step.
- the positioning accuracy of the beacon terminal 5 can be improved compared to the case where the position of the beacon terminal 5 is obtained based on a plurality of RSSIs including an RSSI that is an abnormal value.
- Each of the positioning system 1, the scanner 4 and the beacon terminal 5 includes a computer system having one or more processors and memories. At least part of the functions of each of the positioning system 1, the scanner 4, and the beacon terminal 5 are realized by the processor of the computer system executing the program recorded in the memory of the computer system.
- the program may be recorded in a memory, provided through an electric communication line such as the Internet, or recorded in a non-temporary recording medium such as a memory card and provided.
- the positioning system 1 has a processing unit 2, a first communication unit 31, and a storage unit 32.
- the scanner 4 has a first communication section 41 , a second communication section 42 , a storage section 43 and a processing section 44 .
- the beacon terminal 5 has a first communication section 51 , a second communication section 52 , a storage section 53 and a processing section 54 .
- the positioning system 1 , the scanner 4 and the beacon terminal 5 can communicate with each other via the first communication units 31 , 41 and 51 . That is, the "first communication unit” referred to in the present disclosure can communicate with other "first communication units". “Communicable” as used in the present disclosure means that a signal can be sent and received directly or indirectly via a network, a repeater, or the like, by an appropriate communication method such as wired communication or wireless communication.
- the beacon terminal 5 is a device carried by the user, the first communication unit 51 of the beacon terminal 5 uses wireless communication as a communication method.
- the communication method of the "first communication unit” is, for example, a communication method conforming to the Ethernet (registered trademark) standard, or WiFi (registered trademark).
- the second communication unit 42 of the scanner 4 and the second communication unit 52 of the beacon terminal 5 are used to measure the position of the beacon terminal 5 .
- the second communication units 42 and 52 have communication functions for wireless communication using radio waves.
- the communication method of the second communication units 42 and 52 is, for example, Bluetooth (registered trademark) Low Energy, or WiFi (registered trademark).
- the second communication unit 52 of the beacon terminal 5 transmits a beacon signal, which is a radio signal.
- a beacon signal is a radio signal called an advertisement packet, for example.
- the second communication unit 52 wirelessly transmits beacon signals at predetermined time intervals and with predetermined transmission power.
- the second communication section 42 of the scanner 4 receives the beacon signal transmitted from the second communication section 52 .
- the beacon signal contains identification information of the beacon terminal 5 .
- the identification information is, for example, Bluetooth (registered trademark) Device Address.
- the scanner 4 receives the beacon signal transmitted from the beacon terminal 5 at the second communication unit 42 .
- the storage unit 53 of the beacon terminal 5 stores information about the beacon terminal 5 .
- Information about the beacon terminal includes identification information of the beacon terminal 5, for example.
- the processing unit 54 of the beacon terminal 5 performs overall control of the beacon terminal 5.
- Scanner A plurality of scanners 4 are arranged in a matrix (see FIG. 2).
- the multiple scanners 4 are arranged at regular intervals.
- the storage unit 43 of the scanner 4 stores information about the scanner 4.
- the information about the scanner 4 includes identification information of the scanner 4, for example.
- the processing unit 44 of the scanner 4 obtains the RSSI of the beacon signal received by the second communication unit 42 of the scanner 4. Also, the processing unit 44 performs overall control of the scanner 4 .
- the positioning system 1 is, for example, a server computer.
- the positioning system 1 may be installed inside a facility where a plurality of scanners 4 are installed, or may be installed outside the facility.
- the storage unit 32 of the positioning system 1 stores position information and identification information of multiple scanners 4 .
- the position information and identification information of the plurality of scanners 4 are registered in the positioning system 1 by, for example, an administrator of the facility when the plurality of scanners 4 are installed in the facility.
- the position information and identification information of the plurality of scanners 4 are transmitted from the plurality of scanners 4 to the positioning system 1, for example.
- the positional information of the multiple scanners 4 includes information on the distances between the multiple scanners 4 .
- the processing unit 2 of the positioning system 1 includes a computer system having one or more processors and memory.
- the functions of the processing unit 2 are realized by the processor of the computer system executing a program recorded in the memory of the computer system. That is, the positioning system 1 includes one or more processors for executing the positioning method of this embodiment.
- the program of this embodiment is a program for causing one or more processors to execute the positioning method of this embodiment.
- the processing unit 2 has an acquisition unit 21, a determination unit 22, and a positioning unit 23.
- the acquisition unit 21, the determination unit 22, and the positioning unit 23 merely represent functions realized by the processing unit 2, and do not necessarily represent actual configurations.
- the acquisition unit 21 acquires the RSSI of the beacon signal from each of the multiple scanners 4 . More specifically, the acquisition unit 21 acquires RSSI via the first communication unit 31 . In addition, the acquisition unit 21 acquires the identification information of the beacon terminal 5 corresponding to the RSSI and the identification information of the scanner 4 corresponding to the RSSI together with the RSSI. In addition, when a certain scanner 4 receives a beacon signal transmitted from a certain beacon terminal 5 and measures the RSSI, the "beacon terminal 5 corresponding to the RSSI" is the certain beacon terminal 5, The “scanner 4 corresponding to RSSI” is the scanner 4 described above.
- the determination unit 22 determines whether the RSSI measured by each scanner 4 is an abnormal value.
- the positioning unit 23 obtains the position of the beacon terminal 5 based on multiple RSSIs measured by multiple scanners 4 .
- the positioning unit 23 obtains the position of the beacon terminal 5 based on the RSSI other than the RSSI determined to be an abnormal value by the determination unit 22 .
- the twenty-five scanners 4 installed in the room are marked with A to Y symbols to distinguish the twenty-five scanners 4 .
- the scanner 4 marked with the symbol “A” is referred to as the "A” scanner 4.
- the scanners 4 to which the symbols "B” to "Y” are added are also referred to together with the symbols "B" to "Y.”
- measuring the RSSI for a predetermined number of samples at a certain time is not limited to simultaneously measuring the RSSI for the predetermined number of samples, and is a short time compared to the interval between the time and the next time (for example, 0.05 seconds), the RSSI of a predetermined number of samples may be sequentially measured.
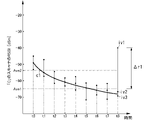
- FIG. 3 shows an example of the RSSI measurement result of the "C" scanner 4.
- Each dot in FIG. 3 represents an instantaneous RSSI value.
- a curve c1 is a theoretical value of RSSI calculated from the distance d between the scanner 4 of “C” and the beacon terminal 5 .
- the relationship between the distance d and the theoretical value of RSSI is expressed by [Equation 1].
- Tpower is the RSSI measured by the scanner 4 of "C” that received the beacon signal when the beacon terminal 5 transmitted the beacon signal at a place 1 m away from the scanner 4 of "C”. Tpower is pre-stored in the storage unit 32 of the positioning system 1 .
- the determination unit 22 of the processing unit 2 extracts the instantaneous value of the RSSI at a predetermined point in time of the scanner 4 of interest among the plurality of scanners 4 .
- the scanner 4 of interest is the scanner 4 of "C”.
- a predetermined point in time is defined as a point in time t8. Time t8 is the time closest to the present. That is, the predetermined time is the time when the latest RSSI is measured.
- the determination unit 22 extracts instantaneous values iv1, iv2, and iv3 (see FIG. 3) of the RSSI of the scanner 4 at "C" at time t8.
- the determination unit 22 also calculates an average RSSI value Ave1 (see FIG. 3) for a predetermined period of time for a predetermined target scanner among the plurality of scanners 4 .
- the target scanner is the scanner 4 of "C”. That is, the target scanner is the "scanner of interest 4".
- the predetermined period is assumed to be the period from time t4 to time t7. That is, the predetermined period is a period before the predetermined time t8. More specifically, the predetermined period is a period including the measurement time point (time point t7) immediately before the predetermined time point t8.
- the determination unit 22 calculates the average RSSI value Ave1 for a predetermined period of time for a predetermined target scanner among the plurality of scanners 4 . That is, the determination unit 22 calculates the average value Ave1 of 12 RSSIs including three RSSIs at time t4, three RSSIs at time t5, three RSSIs at time t6, and three RSSIs at time t7.
- the determination unit 22 determines whether each of the extracted instantaneous values iv1, iv2, and iv3 is an abnormal value. More specifically, if the difference between the instantaneous value and the average value Ave1 is outside the predetermined range, the determination unit 22 determines the instantaneous value to be an abnormal value. For example, the determination unit 22 obtains a value obtained by subtracting the average value Ave1 from the instantaneous value as the difference between the instantaneous value and the average value Ave1. In FIG. 3, the difference ⁇ r1 between the instantaneous value iv1 and the average value Ave1 is approximately 25 [dBm].
- the predetermined range is a range including 0.
- the upper limit value and lower limit value of the predetermined range are pre-stored in the storage unit 32 (see FIG. 1) of the positioning system 1 .
- the predetermined range is assumed to be from -20 [dBm] to 20 [dBm]. Since the difference ⁇ r1 between the instantaneous value iv1 and the average value Ave1 is outside the predetermined range, the determination unit 22 determines the instantaneous value iv1 to be an abnormal value. On the other hand, for the instantaneous values iv2 and iv3, since the difference from the average value Ave1 is within the predetermined range, the determination unit 22 determines that the instantaneous values iv2 and iv3 are not abnormal values (normal values). .
- the upper limit and lower limit of the predetermined range are determined in advance based on the amount of movement of the beacon terminal 5 assumed from the interval between the predetermined period and the predetermined time t8. For example, it is assumed that the user possessing the beacon terminal 5 moves a maximum of 8m between the time point in the middle of the predetermined period and the predetermined time point t8.
- the upper limit of the predetermined range is determined by the amount of change obtained by [Formula 1], that is, the amount of change in RSSI when the distance between the scanner 4 and the beacon terminal 5 changes by 8 m.
- the lower limit is determined to be -1 times the upper limit.
- the determination unit 22 sequentially designates the scanners 4 other than the scanner 4 of "C” as “scanners 4 of interest", and determines whether or not the instantaneous RSSI value at time t8 is an abnormal value.
- the positioning unit 23 (see FIG. 1) of the positioning system 1 obtains the position of the beacon terminal 5 based on two or more RSSIs excluding the RSSI determined to be an abnormal value. More specifically, the positioning unit 23 obtains the distance d between each of the plurality of scanners 4 and the beacon terminal 5 by [Formula 2].
- RSSI_ave in [Equation 2] is the average RSSI value excluding the RSSI determined to be an abnormal value.
- the RSSI_ave at the time t8 of the scanner 4 of "C” is the average value of the instantaneous values iv2 and iv3 of the instantaneous values iv1, iv2 and iv3 excluding the abnormal value.
- the positioning unit 23 performs three-point positioning using, for example, the position information of the plurality of scanners 4 and the distance d between each of the plurality of scanners 4 and the beacon terminal 5, so that the beacon terminal 5 find the position of
- the positioning system 1 treats an instantaneous RSSI value that deviates significantly from the average RSSI value Ave1 of the target scanner for a predetermined period as an abnormal value and does not use it for positioning the beacon terminal 5 .
- the positioning system 1 treats an instantaneous RSSI value that deviates significantly from the average RSSI value Ave1 of the target scanner for a predetermined period as an abnormal value and does not use it for positioning the beacon terminal 5 .
- the above positioning method is shown as a flow chart in FIG. Note that the flowchart shown in FIG. 4 is merely an example of the positioning method according to the present disclosure, and the order of processing may be changed as appropriate, and processing may be added or omitted as appropriate.
- each scanner 4 measures RSSI.
- the measured RSSI is sequentially acquired by the acquisition unit 21 of the positioning system 1 .
- the determination unit 22 selects the scanner 4 of interest. For example, the determination unit 22 first selects the “A” scanner 4 . After returning from step ST5 to step ST2, the determination unit 22 selects another scanner 4. FIG. Steps ST2 to ST5 are repeated until all scanners 4 are selected.
- step ST3 the determining unit 22 obtains a value obtained by subtracting the average value Ave1 of the RSSI of the scanner 4 in a predetermined period from the RSSI at the predetermined time t8 of the scanner 4 of interest, that is, the latest RSSI. Ask for If this value is out of the predetermined range, the determination unit 22 determines that the latest RSSI is an abnormal value (step ST4).
- the determination unit 22 determines whether or not the instantaneous value of RSSI is an abnormal value through steps ST2 to ST4. determine whether That is, the determination unit 22 determines whether or not the instantaneous RSSI values of all the scanners 4 at the predetermined time t8 are abnormal values. After that, the positioning unit 23 obtains the position of the beacon terminal 5 from two or more RSSIs excluding the RSSI determined to be an abnormal value (step ST6).
- each scanner 4 measures RSSI (step ST1). Similarly, the determination unit 22 determines whether or not the new RSSI is an abnormal value.
- the determination unit 22 determines the instantaneous value iv1 to be an abnormal value when the difference ⁇ r1 between the instantaneous value iv1 and the average value Ave1 is outside the predetermined range.
- the predetermined range may have only one of the upper limit and the lower limit. That is, the determination unit 22 may determine the instantaneous value iv1 to be an abnormal value only when the difference ⁇ r1 is greater than the upper limit value, or may determine the instantaneous value iv1 to be an abnormal value only when the difference ⁇ r1 is less than the lower limit value. You can judge.
- the target scanner is the scanner 4 of interest.
- the target scanner may be the scanner 4 having the largest RSSI average value for the predetermined period among the plurality of scanners 4 .
- the determination unit 22 obtains the average value of the RSSI for a predetermined period for each of the plurality of scanners 4, identifies the scanner 4 with the largest average value, and selects the scanner 4 as the target scanner. For example, if the predetermined period is from time t4 to time t7, the scanner 4 with the largest RSSI average value for the predetermined period among the plurality of (25) scanners 4 shown in FIG. There is a high possibility that the scanner 4 located near the beacon terminal 5 (for example, the scanner 4 of "M" or "R”) will be detected.
- the predetermined period is a time point before the predetermined time point t8.
- the predetermined period of time may include the predetermined point in time t8.
- the predetermined period may be a time after the predetermined time t8.
- the determination unit 22 determines whether or not the instantaneous value of the RSSI at the past predetermined time t8 is an abnormal value.
- each of the plurality of scanners 4 measures RSSI three times at each time point t0 to t8.
- the number of times of measurement at each time point t0 to t8 may be once, twice, or four times or more.
- the length of the predetermined period may be different from that of the first embodiment.
- At least one of the plurality of scanners 4 and one or more beacon terminals 5 may be included in the positioning system 1 configuration.
- greater than or equal to includes both the case where the two values are equal and the case where one of the two values exceeds the other.
- the term “greater than or equal to” as used herein may be synonymous with “greater than” which includes only the case where one of the two values exceeds the other. That is, whether the two values are equal can be arbitrarily changed depending on the setting of the reference value, etc., so there is no technical difference between “greater than” and “greater than”.
- less than may be synonymous with “less than”.
- the positioning system 1 in the present disclosure includes a computer system.
- a computer system is mainly composed of a processor and a memory as hardware. At least part of the function of the positioning system 1 in the present disclosure is realized by the processor executing a program recorded in the memory of the computer system.
- the program may be recorded in advance in the memory of the computer system, may be provided through an electric communication line, or may be recorded in a non-temporary recording medium such as a computer system-readable memory card, optical disk, or hard disk drive. may be provided.
- a processor in a computer system consists of one or more electronic circuits, including semiconductor integrated circuits (ICs) or large scale integrated circuits (LSIs).
- Integrated circuits such as ICs or LSIs are called differently depending on the degree of integration, and include integrated circuits called system LSI, VLSI (Very Large Scale Integration), or ULSI (Ultra Large Scale Integration).
- FPGAs Field-Programmable Gate Arrays
- a plurality of electronic circuits may be integrated into one chip, or may be distributed over a plurality of chips.
- a plurality of chips may be integrated in one device, or may be distributed in a plurality of devices.
- a computer system includes a microcontroller having one or more processors and one or more memories. Accordingly, the microcontroller also consists of one or more electronic circuits including semiconductor integrated circuits or large scale integrated circuits.
- the positioning system 1 it is not an essential configuration of the positioning system 1 that a plurality of functions in the positioning system 1 are integrated into one device, and the components of the positioning system 1 are provided dispersedly in a plurality of devices. good too. Furthermore, at least part of the functions of the positioning system 1, for example, at least part of the functions of the determination unit 22, may be realized by the cloud (cloud computing) or the like.
- Embodiment 2 will be described below. Configurations similar to those of the first embodiment are denoted by the same reference numerals, and descriptions thereof are omitted.
- the configurations of the positioning system 1, the beacon terminal 5 and the scanner 4 are the same as in the first embodiment.
- the processing in the determination unit 22 of the positioning system 1 differs between the first embodiment and the second embodiment.
- the determination unit 22 determines that the RSSI instantaneous value at a predetermined point in time of the scanner 4 of interest among the plurality of scanners 4 is an abnormal value.
- the determination unit 22 determines the instantaneous value of the RSSI at a predetermined point in time of the scanner 4 of interest among the plurality of scanners 4 to be an abnormal value when all of the plurality of conditions are satisfied.
- the predetermined condition is the difference between the instantaneous value of the RSSI of the target scanner 4 out of the plurality of scanners 4 at a predetermined point in time and the average value of the RSSI of the predetermined target scanner out of the plurality of scanners 4 over a predetermined period.
- the plurality of conditions include a first condition, a second condition and a third condition
- the first condition is an example of the predetermined condition.
- the determination unit 22 of the first and second embodiments sets the instantaneous value of the RSSI of the scanner 4 of interest at a predetermined time point among the plurality of scanners 4 to an abnormal value.
- the one or more conditions are a plurality of conditions.
- the positioning system 1 of this embodiment is a positioning system that obtains the position of the beacon terminal 5 based on the RSSI of the beacon signal transmitted from the beacon terminal 5 .
- the positioning system 1 includes an acquisition unit 21 that acquires the RSSI of the beacon signal in each of the multiple scanners 4 that receive the beacon signal. Further, the positioning system 1 detects that the instantaneous value of the RSSI at a predetermined time point of the scanner 4 of interest among the plurality of scanners 4 is abnormal when all of the plurality of conditions including the first condition, the second condition, and the third condition are satisfied.
- a judgment unit 22 for judging the value is provided.
- the positioning system 1 includes a positioning unit 23 that obtains the position of the beacon terminal 5 based on two or more RSSIs excluding the RSSI determined to be an abnormal value by the determination unit 22 .
- the first condition is that a value obtained by subtracting a first average value of a predetermined target scanner among the plurality of scanners 4 from an instantaneous value of RSSI at a predetermined point in time of the scanner 4 of interest is greater than a threshold.
- the first average value is the average value of RSSI in the first period.
- the first period is a period before the predetermined point in time or a period including the predetermined point in time.
- the second condition is that, for the scanner 4 of interest, the first average value is smaller than the second average value of the RSSI in the second period preceding the first period.
- the third condition is that the first average value of the scanner 4 having the largest first average value among the plurality of scanners 4 is greater than the second average value.
- the positioning method of this embodiment is a positioning method for determining the position of the beacon terminal 5 based on the RSSI of the beacon signal transmitted from the beacon terminal 5.
- the positioning method includes obtaining the RSSI of the beacon signal at each of the plurality of scanners 4 that receive the beacon signal. Furthermore, in the positioning method, when all of a plurality of conditions including the first condition, the second condition, and the third condition are satisfied, the instantaneous value of the RSSI at a predetermined point in time of the scanner 4 of interest among the plurality of scanners 4 is an abnormal value. It includes a determination step of determining that Furthermore, the positioning method includes a step of determining the position of the beacon terminal 5 based on two or more RSSIs excluding the RSSI determined to be an abnormal value in the determining step.
- the first condition is that a value obtained by subtracting a first average value of a predetermined target scanner among the plurality of scanners 4 from an instantaneous value of RSSI at a predetermined point in time of the scanner 4 of interest is greater than a threshold.
- the first average value is the average value of RSSI in the first period.
- the first period is a period before the predetermined point in time or a period including the predetermined point in time.
- the second condition is that, for the scanner 4 of interest, the first average value is smaller than the second average value of the RSSI in the second period preceding the first period.
- the third condition is that the first average value of the scanner 4 having the largest first average value among the plurality of scanners 4 is greater than the second average value.
- FIG. 3 shows an example of RSSI measurement results for the scanner 4 of "C”.
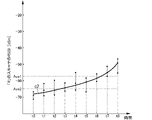
- FIG. 5 shows an example of RSSI measurement results for the “R” scanner 4 .
- Curve c2 in FIG. 5 is the theoretical value of RSSI calculated from the distance d between scanner 4 of “R” and beacon terminal 5 .
- the determination unit 22 extracts the instantaneous value of the RSSI at a predetermined point in time of the scanner 4 of interest among the plurality of scanners 4 .
- the scanner 4 of interest is the scanner 4 of "C”.
- a predetermined point in time is defined as a point in time t8.
- the determination unit 22 extracts instantaneous values iv1, iv2, and iv3 (see FIG. 3) of the RSSI of the scanner 4 at "C" at time t8.
- the determination unit 22 also calculates a first average value Ave1 (see FIG. 3), which is the average value of the RSSI in the first period for a predetermined target scanner among the plurality of scanners 4 .
- the first average value Ave1 matches the "average value Ave1" of the first embodiment.
- the target scanner is the scanner 4 of "C”. That is, the target scanner is the "scanner of interest 4".
- a first period is defined as a period from time t4 to time t7. That is, the first period is a period including the measurement time (time t7) immediately before the predetermined time t8.
- the determination unit 22 calculates a second average value Ave2 (see FIG. 3), which is the average value of the RSSI in the second period of the scanner 4 of interest (the "C" scanner 4).
- the second period is a period before the first period. That the second period is a period before the first period means that the starting point of the second period (time point t0) is before the starting point of the first period (time point t4), and It means that the end point (time point t3) is earlier than the end point (time point t7) of the first period.
- the second period is the period from time t0 to time t3. That is, in the present embodiment, the end point of the second period is before the start point of the first period. Note that the end point of the second period may be after the start point of the first period.
- the determination unit 22 calculates individual first average values Ave1 for the plurality of scanners 4 . Then, the scanner 4 having the largest first average value Ave1 is specified among the plurality of scanners 4, and the second average value Ave2 (see FIG. 5) of this scanner 4 is calculated. Here, it is assumed that the scanner 4 having the largest first average value Ave1 among the plurality of scanners 4 is the "R" scanner 4 .
- the determination unit 22 determines whether or not each of the instantaneous values iv1, iv2, and iv3 of the scanner 4 of interest at a predetermined time t8 is an abnormal value. More specifically, the determination unit 22 determines that the corresponding instantaneous value is an abnormal value when all of the plurality of conditions including the first condition, the second condition, and the third condition are satisfied. The determination unit 22 determines that the corresponding instantaneous value is not an abnormal value (is a normal value) when at least one of a plurality of conditions is not satisfied. In this embodiment, the multiple conditions consist of only the first condition, the second condition, and the third condition.
- the first condition is that the value obtained by subtracting the first average value Ave1 of the target scanner (scanner 4 of "C") from the instantaneous value of RSSI at predetermined time t8 of the scanner 4 of interest (scanner 4 of "C") is , is greater than a threshold.
- the threshold is greater than 0, for example.
- the first condition is the same as the abnormal value determination condition (predetermined condition) when the predetermined range has only the upper limit value out of the upper limit value and the lower limit value in the first embodiment.
- the threshold is set to 20 [dBm].
- the second condition is that the first average value Ave1 is smaller than the second average value Ave2 for the scanner 4 of interest (the "C” scanner 4). That is, basically, the second condition is a condition that is satisfied when the beacon terminal 5 moves away from the focused scanner 4 during the second period to the first period. In FIG. 3, the second condition is satisfied in the scanner 4 of interest (the "C" scanner 4).
- the third condition is that the first average value Ave1 is greater than the second average value Ave2 for the scanner 4 ("R" scanner 4) having the largest first average value Ave1 among the plurality of scanners 4 . That is, basically, the third condition is a condition that is satisfied when the beacon terminal 5 approaches the scanner 4 with the largest first average value Ave1 during the period from the second period to the first period. In FIG. 5, the third condition is satisfied in the scanner 4 having the largest first average value Ave1 (“R” scanner 4).
- the determination unit 22 determines that the RSSI instantaneous value iv1 at the predetermined time t8 of the scanner 4 of interest (scanner 4 of "C") is an abnormal value. Since the instantaneous values iv2 and iv3 do not satisfy the first condition, they are determined to be non-abnormal values (normal values).
- the determination of abnormal values in this embodiment will be qualitatively explained. Based on the second condition and the third condition, it is determined that the beacon terminal 5 moved away from the “C” scanner 4 and approached the “R” scanner 4 during the period from the second period to the first period. In spite of this, it is determined by the first condition that the instantaneous value iv1 of the scanner 4 for "C" has become a large value. In such a case, the determination unit 22 determines the instantaneous value iv1 to be an abnormal value.
- the determination unit 22 sequentially designates the scanners 4 other than the scanner 4 of "C” as “scanners 4 of interest", and determines whether or not the instantaneous RSSI value at time t8 is an abnormal value.
- the positioning unit 23 (see FIG. 1) of the positioning system 1 obtains the position of the beacon terminal 5 based on two or more RSSIs excluding the RSSI determined to be an abnormal value. That is, as in the first embodiment, the positioning unit 23 obtains the distance d between each of the plurality of scanners 4 and the beacon terminal 5 by [Formula 2]. Furthermore, the positioning unit 23 performs three-point positioning using, for example, the position information of the plurality of scanners 4 and the distance d between each of the plurality of scanners 4 and the beacon terminal 5, so that the beacon terminal 5 find the position of
- the positioning accuracy of the beacon terminal 5 can be improved as compared with the case where the position of the beacon terminal 5 is obtained based on a plurality of RSSIs including an abnormal RSSI. can be done. Moreover, it can be determined whether the beacon terminal 5 has moved according to the second condition and the third condition. That is, only when the beacon terminal 5 moves, it is possible to determine whether an abnormal value has occurred due to movement. Therefore, the amount of processing in the determination unit 22 of the positioning system 1 can be reduced.
- the above positioning method is shown as a flow chart in FIG. Note that the flowchart shown in FIG. 6 is merely an example of the positioning method according to the present disclosure, and the order of processing may be changed as appropriate, and processing may be added or omitted as appropriate.
- each scanner 4 measures RSSI.
- the measured RSSI is sequentially acquired by the acquisition unit 21 of the positioning system 1 .
- the determination unit 22 selects the scanner 4 of interest. For example, the determination unit 22 first selects the “A” scanner 4 . After returning from step ST27 to step ST22, the determination unit 22 selects another scanner 4. FIG. Steps ST22 to ST27 are repeated until all scanners 4 are selected.
- step ST23 the determination unit 22 obtains a value obtained by subtracting the first average value Ave1 of the scanner 4 of interest from the RSSI of the scanner 4 of interest at a predetermined time t8, that is, the latest RSSI. If this value is greater than the threshold, the process proceeds to step ST24. On the other hand, when this value is equal to or less than the threshold, the determination unit 22 determines that the latest RSSI is a normal value.
- the determination unit 22 determines whether or not the first average value Ave1 of the scanner 4 of interest is smaller than the second average value Ave2. When the first average value Ave1 is smaller than the second average value Ave2, the process proceeds to step ST25. On the other hand, when the first average value Ave1 is greater than or equal to the second average value Ave2, the determination unit 22 determines that the latest RSSI is a normal value.
- step ST25 the determination unit 22 determines whether or not the first average value Ave1 of the scanner 4 having the largest first average value Ave1 is greater than the second average value Ave2.
- the determination section 22 determines that the latest RSSI is an abnormal value (step ST26).
- the determination unit 22 determines that the latest RSSI is normal.
- the determination unit 22 determines whether or not the instantaneous RSSI value is an abnormal value through steps ST22 to ST26. determine whether After that, the positioning unit 23 obtains the position of the beacon terminal 5 from two or more RSSIs excluding the RSSI determined to be an abnormal value (step ST28).
- each scanner 4 measures RSSI (step ST21). Similarly, the determination unit 22 determines whether or not the new RSSI is an abnormal value.
- the positioning system 1 includes one or more processors (processing units 2) for executing the positioning method.
- a program according to one aspect is a program for causing one or more processors to execute the positioning method of the second embodiment.
- the plurality of conditions for determining an abnormal value further include a fourth condition in addition to the first, second and third conditions.
- the fourth condition is that the value obtained by subtracting the first average value Ave1 of the scanner 4 having the largest first average value Ave1 among the plurality of scanners 4 from the second average value Ave2 of the scanner 4 of interest is greater than a predetermined value. This is the condition.
- the predetermined value is greater than 0.
- the scanner 4 of interest be the scanner 4 of "C". Assume that the scanner 4 having the largest first average value Ave1 among the plurality of scanners 4 is the scanner 4 of "R”. 3 and 5, the value obtained by subtracting the first average value Ave1 of the "R” scanner 4 from the second average value Ave2 of the "C” scanner 4 is about 5 [dBm].
- the first average value Ave1 for the “R” scanner 4 is the largest first average value
- the first average value Ave1 for the “C” scanner 4 is equal to the “R” scanner 4 is smaller than the first average value Ave1 of .
- the first condition when it is determined that the instantaneous value of the scanner 4 of "C" is large, the determining unit 22 determines that the instantaneous value is an abnormal value.
- the plurality of conditions for determining an abnormal value are such that the value obtained by subtracting the first average value Ave1 from the second average value Ave2 is , is greater than the comparison value.
- the comparison value is greater than zero.
- the plurality of conditions for determining an abnormal value are the scanner 4 having the largest first average value Ave1 among the plurality of scanners 4 (for example, the “R” scanner 4).
- a sixth condition is included that the value obtained by subtracting the second average value Ave2 from the average value Ave1 is greater than the reference value. Reference values are greater than zero.
- the value obtained by subtracting the first average value Ave1 from the second average value Ave2 changes according to the amount of movement of the beacon terminal 5 from the second period to the first period.
- the value obtained by subtracting the second average value Ave2 from the first average value Ave1 is Change. That is, in Modification 2, an abnormal value determination is made only when the amount of movement of the beacon terminal 5 is equal to or greater than a certain amount.
- the plurality of conditions for determining an abnormal value may not include one of the fifth condition and the sixth condition.
- the target scanner is the scanner 4 with the largest first average value Ave1 among the plurality of scanners 4 .
- the first condition is satisfied when the difference between the first average value Ave1 of the scanner 4 and the instantaneous value of the scanner 4 of interest is greater than the threshold.
- the distance between the scanner 4 having the largest first average value Ave1 among the plurality of scanners 4 and the scanner 4 having the largest second average value Ave2 among the plurality of scanners 4 is The process may further include determining a threshold based on.
- the determination unit 22 calculates the distance based on the coordinates of each of the two scanners 4 .
- the above distance corresponds to the amount of movement of the beacon terminal 5 from the second period to the first period. If the effects of interference, reflection, etc. of radio waves are not considered, the greater the distance, the smaller the instantaneous value of the scanner 4 of interest. Therefore, for example, the larger the distance, the smaller the threshold may be.
- the scanner 4 of interest may be the scanner 4 with the largest second average value Ave2 among the plurality of scanners 4 .
- Ave2 the largest second average value
- the first period is a point in time before the predetermined point in time t8.
- the first time period may include the predetermined point in time t8.
- the lengths of the first period and the second period may be different from those in the second embodiment. Also, the length of the first period and the length of the second period may be different from each other.
- the plurality of conditions for determining an abnormal value are the scanner 4 having the largest first average value Ave1 among the plurality of scanners 4 and the scanner 4 having the largest second average value Ave2 among the plurality of scanners 4. may further include a seventh condition that the distance of is greater than a predetermined value. Based on the coordinates of each of the two scanners 4, the distance is calculated.
- the positioning method is a positioning method for determining the position of the beacon terminal (5) based on the RSSI of the beacon signal transmitted from the beacon terminal (5).
- the positioning method includes obtaining the RSSI of the beacon signal at each of a plurality of scanners (4) receiving the beacon signal. Further, the positioning method includes an instantaneous value of RSSI at a predetermined point in time for a scanner (4) of interest among the plurality of scanners (4), and an RSSI for a predetermined period of a predetermined target scanner among the plurality of scanners (4).
- the positioning method includes the step of determining the position of the beacon terminal (5) based on two or more RSSIs excluding the RSSI determined to be an outlier in the determining step.
- the predetermined period is a period before the predetermined point in time.
- the target scanner is the focused scanner (4).
- abnormal values can be found from changes in the RSSI of the scanner (4) of interest.
- the target scanner is the scanner (4) having the largest RSSI average value (Ave1) for the predetermined period among the plurality of scanners (4). is.
- an abnormal value can be found by comparing the RSSI of the scanner (4) of interest and the RSSI of the target scanner.
- the positioning method according to the fifth aspect is a positioning method for determining the position of the beacon terminal (5) based on the RSSI of the beacon signal transmitted from the beacon terminal (5).
- the positioning method includes obtaining the RSSI of the beacon signal at each of a plurality of scanners (4) receiving the beacon signal. Furthermore, in the positioning method, when a plurality of conditions including the first condition, the second condition and the third condition are all satisfied, the instantaneous RSSI of the scanner (4) of interest among the plurality of scanners (4) at a predetermined time is A decision step of determining the value as an outlier is included.
- the positioning method includes the step of determining the position of the beacon terminal (5) based on two or more RSSIs excluding the RSSI determined to be an outlier in the determining step.
- the first condition is that the value obtained by subtracting the first average value (Ave1) of a predetermined target scanner among the plurality of scanners (4) from the instantaneous value of the RSSI at a predetermined point in time of the scanner (4) of interest is higher than the threshold.
- the condition is that it is large.
- the first average value (Ave1) is the average value of RSSI for a first period before or including a predetermined point in time.
- the second condition is that for the scanner (4) of interest, the first average value (Ave1) is less than the second average value (Ave2) of the RSSI for the second period prior to the first period. It is a condition.
- the third condition is that the first average value (Ave1) is greater than the second average value (Ave2) with respect to the scanner (4) having the largest first average value (Ave1) among the plurality of scanners (4). be.
- the beacon terminal (5) it is possible to improve the positioning accuracy of the beacon terminal (5) compared to the case of obtaining the position of the beacon terminal (5) based on a plurality of RSSIs including an abnormal RSSI.
- the plurality of conditions are obtained by converting the second average value (Ave2) of the scanner (4) of interest from the first average value (Ave2) of the plurality of scanners (4). It further includes the condition that the value obtained by subtracting the first average value (Ave1) of the scanner (4) having the largest value (Ave1) is greater than a predetermined value greater than zero.
- the plurality of conditions is the second average value (Ave2) minus the first average value (Ave1) for the scanner (4) of interest. contains the condition that the value is greater than the comparison value, which is greater than zero.
- abnormal values can be found from the RSSI that changes due to the movement of the beacon terminal (5).
- the plurality of conditions is the scanner (4) having the largest first average value (Ave1) ( Regarding 4), include the condition that the value obtained by subtracting the second average value (Ave2) from the first average value (Ave1) is greater than a reference value greater than zero.
- abnormal values can be found from the RSSI that changes due to the movement of the beacon terminal (5).
- the plurality of conditions is the scanner (4) having the largest first average value (Ave1) ( 4) and the scanner (4) having the largest second average value (Ave2) among the plurality of scanners (4) is greater than a predetermined value.
- abnormal values can be found from the RSSI that changes due to the movement of the beacon terminal (5).
- the scanner (4) of interest has the highest second average value (Ave2) among the plurality of scanners (4).
- the target scanner is the focused scanner (4).
- abnormal values can be found from changes in the RSSI of the scanner (4) of interest.
- the target scanner is the scanner (4 ).
- an abnormal value can be found by comparing the RSSI of the scanner (4) of interest and the RSSI of the target scanner.
- Configurations other than the first aspect or the fifth aspect are not essential configurations for the positioning method of the present disclosure, and can be omitted as appropriate.
- a program according to a thirteenth aspect is a program for causing one or more processors to execute the positioning method according to any one of the first to twelfth aspects.
- the positioning system (1) is a positioning system that obtains the position of the beacon terminal (5) based on the RSSI of the beacon signal transmitted from the beacon terminal (5).
- a positioning system (1) comprises an acquisition unit (21) for acquiring an RSSI of a beacon signal in each of a plurality of scanners (4) that receive beacon signals. Furthermore, the positioning system (1) provides the instantaneous value of the RSSI at a predetermined point in time for a scanner (4) of interest among the plurality of scanners (4) and the predetermined period for a predetermined target scanner among the plurality of scanners (4).
- the positioning system (1) includes a positioning unit (23) that determines the position of the beacon terminal (5) based on two or more RSSIs excluding the RSSI determined to be an abnormal value by the determination unit (22).
- the positioning system (1) is a positioning system that obtains the position of the beacon terminal (5) based on the RSSI of the beacon signal transmitted from the beacon terminal (5).
- a positioning system (1) comprises an acquisition unit (21) for acquiring an RSSI of a beacon signal in each of a plurality of scanners (4) that receive beacon signals. Further, the positioning system (1), when all of the plurality of conditions including the first condition, the second condition and the third condition are satisfied, the positioning system (1) of the scanner (4) of interest among the plurality of scanners (4) at a predetermined time point.
- a judgment unit (22) for judging an instantaneous value of RSSI as an abnormal value is provided.
- the positioning system (1) includes a positioning unit (23) that determines the position of the beacon terminal (5) based on two or more RSSIs excluding the RSSI determined to be an abnormal value by the determination unit (22).
- the first condition is that the value obtained by subtracting the first average value (Ave1) of a predetermined target scanner among the plurality of scanners (4) from the instantaneous value of the RSSI at a predetermined point in time of the scanner (4) of interest is higher than the threshold.
- the condition is that it is large.
- the first average value (Ave1) is the average value of RSSI for a first period before or including a predetermined point in time.
- the second condition is that for the scanner (4) of interest, the first average value (Ave1) is less than the second average value (Ave2), which is the average value of the RSSI for the second period prior to the first period. It is a condition.
- the third condition is that the first average value (Ave1) is greater than the second average value (Ave2) with respect to the scanner (4) having the largest first average value (Ave1) among the plurality of scanners (4). be.
- various configurations (including modifications) of the positioning system (1) according to each embodiment are embodied in a positioning method, a (computer) program, or a non-temporary recording medium recording the program. It is possible.
- positioning system 4 scanner 5 beacon terminal 21 acquisition unit 22 determination unit 23 positioning unit Ave1 average value, first average value Ave2 second average value
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
L'objet de la présente invention est d'améliorer la précision de positionnement d'un terminal de balise. Ce procédé de positionnement consiste en une étape destinée à acquérir des RSSI de signaux de balises respectifs d'une pluralité d'analyseurs (4) qui reçoivent des signaux de balises. En outre, le procédé de positionnement consiste en une étape de détermination lors de laquelle si la différence entre une valeur instantanée de RSSI à un instant prédéfini d'un analyseur (4) d'intérêt parmi la pluralité d'analyseurs (4), et la valeur moyenne de RSSI durant une période prédéfinie d'un analyseur cible prédéfini parmi la pluralité d'analyseurs (4), est une valeur qui est à l'extérieur d'une plage prédéfinie, une valeur instantanée de RSSI à l'instant prédéfini de l'analyseur (4) d'intérêt est déterminée comme étant une valeur anormale. De plus, le procédé de positionnement consiste en une étape destinée à trouver la position du terminal de balise (5) sur la base de deux RSSI ou plus desquels la RSSI déterminée comme étant une valeur anormale lors de l'étape de détermination a été retirée.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023527515A JPWO2022259665A1 (fr) | 2021-06-10 | 2022-03-10 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-097580 | 2021-06-10 | ||
| JP2021097580 | 2021-06-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022259665A1 true WO2022259665A1 (fr) | 2022-12-15 |
Family
ID=84425780
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/010615 WO2022259665A1 (fr) | 2021-06-10 | 2022-03-10 | Procédé de positionnement, programme, et système de positionnement |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2022259665A1 (fr) |
| WO (1) | WO2022259665A1 (fr) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130260693A1 (en) * | 2012-03-27 | 2013-10-03 | Microsoft Corporation | Proximate beacon identification |
| JP2017009368A (ja) * | 2015-06-19 | 2017-01-12 | 忠信 藩 | 測位方法、測位システム |
| JP2017227531A (ja) * | 2016-06-22 | 2017-12-28 | 株式会社ベイビッグ | 検知システム及び検知方法 |
-
2022
- 2022-03-10 JP JP2023527515A patent/JPWO2022259665A1/ja active Pending
- 2022-03-10 WO PCT/JP2022/010615 patent/WO2022259665A1/fr active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130260693A1 (en) * | 2012-03-27 | 2013-10-03 | Microsoft Corporation | Proximate beacon identification |
| JP2017009368A (ja) * | 2015-06-19 | 2017-01-12 | 忠信 藩 | 測位方法、測位システム |
| JP2017227531A (ja) * | 2016-06-22 | 2017-12-28 | 株式会社ベイビッグ | 検知システム及び検知方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022259665A1 (fr) | 2022-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI510112B (zh) | 能夠執行增強指紋映射和位置識別的無線通訊裝置 | |
| US8195201B2 (en) | Radio positioning system and coordinate configuring method | |
| US10182306B2 (en) | Device and method for determining disposition of a plurality of radio apparatuses | |
| EP1231478A1 (fr) | Procédé et dispositif de calcul d' une position | |
| JP2005536944A (ja) | 無線ローカルエリアネットワークにおける所在位置の検知方法およびシステム | |
| JP2005176386A (ja) | モバイル機器 | |
| CN109068272B (zh) | 相似用户识别方法、装置、设备及可读存储介质 | |
| CN104661303B (zh) | 用于确定无线局域网设备位置的系统和方法 | |
| JP5171943B2 (ja) | Rfidシステムにおけるタグ衝突防止のための最適のフレームサイズを決定する方法 | |
| WO2011014375A2 (fr) | Diversité dantenne pour un système et un procédé de poursuite sans fil | |
| JP5127807B2 (ja) | 無線測位システム、無線測位方法、及び、プログラム | |
| US20190313363A1 (en) | Method for identifying line of sight path and wireless device | |
| CN112188614B (zh) | 一种室内定位方法及设备 | |
| KR20190044821A (ko) | LoRa망 내 태그의 효율적인 위치를 측정하는 시스템 및 방법 | |
| CN110650517A (zh) | 一种基于识别遮挡的uwb定位标签节电方案 | |
| WO2022259665A1 (fr) | Procédé de positionnement, programme, et système de positionnement | |
| US11940548B2 (en) | Estimation and identification device and estimation and identification system | |
| US11576113B2 (en) | Communication apparatus, access point management apparatus, selective communication connection method, and non-transitory computer readable medium | |
| CN112543421A (zh) | 一种定位方法、装置、设备及存储介质 | |
| CN110392387B (zh) | 无线信号的角度测量方法和设备 | |
| JPWO2006011208A1 (ja) | 無線通信制御装置および無線通信システム | |
| Maneerat et al. | Robust floor determination algorithm for indoor wireless localization systems under reference node failure | |
| CN118159862A (zh) | 信息处理系统、信息处理装置、信息处理方法、信息处理程序、空调设备以及照明装置 | |
| JP7411885B2 (ja) | 位置推定方法、位置推定プログラム、および移動無線装置 | |
| JP7627898B2 (ja) | 測位方法、プログラム及び測位システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22819855 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023527515 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22819855 Country of ref document: EP Kind code of ref document: A1 |