WO2022239600A1 - 情報処理装置、情報処理方法、及びプログラム - Google Patents
情報処理装置、情報処理方法、及びプログラム Download PDFInfo
- Publication number
- WO2022239600A1 WO2022239600A1 PCT/JP2022/017867 JP2022017867W WO2022239600A1 WO 2022239600 A1 WO2022239600 A1 WO 2022239600A1 JP 2022017867 W JP2022017867 W JP 2022017867W WO 2022239600 A1 WO2022239600 A1 WO 2022239600A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- point cloud
- cloud data
- segmented point
- sensor
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/04—Interpretation of pictures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4808—Evaluating distance, position or velocity data
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/579—Depth or shape recovery from multiple images from motion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
- G06T2207/10021—Stereoscopic video; Stereoscopic image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10032—Satellite or aerial image; Remote sensing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
Definitions
- Japanese Patent Application Laid-Open No. 2016-189184 describes that point cloud data is adjusted according to the posture of LiDAR. This adjustment of the point cloud data is performed when synthesizing the point cloud data before and after the posture change.
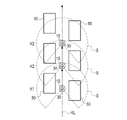
- the external sensor 32 emits a laser beam L in a visual field range S of, for example, 135 degrees left and right (270 degrees in total) and 15 degrees up and down (30 degrees in total) with respect to the traveling direction of the moving object 10 .
- the external sensor 32 emits the laser beam L over the entire visual field range S while changing the angle by 0.25 degrees in either the horizontal direction or the vertical direction, for example.
- the external sensor 32 repeatedly scans the visual field range S and outputs point cloud data for each scan.
- the point cloud data output by the external sensor 32 for each scan is hereinafter referred to as segmented point cloud data PG.
- the moving object 10 autonomously flies along a prescribed route while estimating its own position based on the data acquired by the external sensor 32 and the internal sensor 34 .
- the mobile body system 2 uses SLAM technology, for example, to simultaneously estimate the self-location of the mobile body 10 and create an environment map.
- the moving body 10 acquires and outputs segmented point cloud data PG1 to PG3 by the external sensor 32 at positions K1 to K3.
- Each point included in the segmented point cloud data PG1 to PG3 represents the position (three-dimensional coordinates) of the reflection point of the laser beam L by the structure 50 .
- the second sensor 32B extracts corresponding feature points U1 and U2 from a pair of image data PD1 and PD2.
- the second sensor 32B calculates the three-dimensional coordinates of the point P represented by the corresponding feature points U1 and U2 using the principle of triangulation based on the difference (parallax) between the extracted feature points U1 and U2. .
- Known algorithms such as SIFT, SURF, and AKAZE can be used to extract feature points.
- the second sensor 32B can measure the edge portion of the structure with high accuracy.
- the first sensor 32A cannot measure the edge portion of the structure with high accuracy.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Image Processing (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023520937A JP7753356B2 (ja) | 2021-05-11 | 2022-04-14 | 情報処理装置、情報処理方法、及びプログラム |
| DE112022001481.4T DE112022001481T5 (de) | 2021-05-11 | 2022-04-14 | Informationsverarbeitungsvorrichtung, informationsverarbeitungsverfahren und programm |
| CN202280032497.8A CN117280247A (zh) | 2021-05-11 | 2022-04-14 | 信息处理装置、信息处理方法及程序 |
| US18/493,800 US20240054612A1 (en) | 2021-05-11 | 2023-10-24 | Iinformation processing apparatus, information processing method, and program |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021080588 | 2021-05-11 | ||
| JP2021-080588 | 2021-05-11 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/493,800 Continuation US20240054612A1 (en) | 2021-05-11 | 2023-10-24 | Iinformation processing apparatus, information processing method, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022239600A1 true WO2022239600A1 (ja) | 2022-11-17 |
Family
ID=84028265
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/017867 Ceased WO2022239600A1 (ja) | 2021-05-11 | 2022-04-14 | 情報処理装置、情報処理方法、及びプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240054612A1 (https=) |
| JP (1) | JP7753356B2 (https=) |
| CN (1) | CN117280247A (https=) |
| DE (1) | DE112022001481T5 (https=) |
| WO (1) | WO2022239600A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7561683B2 (ja) * | 2021-05-13 | 2024-10-04 | 日立Astemo株式会社 | 地図生成・自己位置推定装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009174898A (ja) * | 2008-01-22 | 2009-08-06 | Toyota Motor Corp | 移動体および環境情報作成方法 |
| JP2014035702A (ja) * | 2012-08-09 | 2014-02-24 | Topcon Corp | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
| JP2016218694A (ja) * | 2015-05-19 | 2016-12-22 | 株式会社パスコ | 3次元モデル生成装置、3次元モデル生成方法、及びプログラム |
| WO2019044500A1 (ja) * | 2017-09-04 | 2019-03-07 | 日本電産株式会社 | 位置推定システム、および当該位置推定システムを備える移動体 |
| WO2019193642A1 (ja) * | 2018-04-03 | 2019-10-10 | 株式会社自律制御システム研究所 | 無人航空機用の自己位置推定装置及び自己位置推定方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6322960B2 (ja) * | 2013-02-01 | 2018-05-16 | 株式会社リコー | 慣性装置、方法及びプログラム |
| US9699639B2 (en) * | 2013-11-15 | 2017-07-04 | Sony Corporation | Information processing device, information processing method and program |
| US9715016B2 (en) | 2015-03-11 | 2017-07-25 | The Boeing Company | Real time multi dimensional image fusing |
| WO2018081328A1 (en) * | 2016-10-26 | 2018-05-03 | Ring Inc. | Customizable intrusion zones for audio/video recording and communication devices |
| US10677897B2 (en) * | 2017-04-14 | 2020-06-09 | Luminar Technologies, Inc. | Combining lidar and camera data |
| EP3836067A4 (en) * | 2018-08-10 | 2022-04-27 | Pioneer Corporation | DATA STRUCTURE, STORAGE MEDIA, STORAGE DEVICE AND RECEIVER |
| US11501490B2 (en) * | 2020-07-28 | 2022-11-15 | Toyota Research Institute, Inc. | Systems and methods for multi-resolution fusion of pseudo-LiDAR features |
-
2022
- 2022-04-14 WO PCT/JP2022/017867 patent/WO2022239600A1/ja not_active Ceased
- 2022-04-14 DE DE112022001481.4T patent/DE112022001481T5/de active Pending
- 2022-04-14 CN CN202280032497.8A patent/CN117280247A/zh active Pending
- 2022-04-14 JP JP2023520937A patent/JP7753356B2/ja active Active
-
2023
- 2023-10-24 US US18/493,800 patent/US20240054612A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009174898A (ja) * | 2008-01-22 | 2009-08-06 | Toyota Motor Corp | 移動体および環境情報作成方法 |
| JP2014035702A (ja) * | 2012-08-09 | 2014-02-24 | Topcon Corp | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
| JP2016218694A (ja) * | 2015-05-19 | 2016-12-22 | 株式会社パスコ | 3次元モデル生成装置、3次元モデル生成方法、及びプログラム |
| WO2019044500A1 (ja) * | 2017-09-04 | 2019-03-07 | 日本電産株式会社 | 位置推定システム、および当該位置推定システムを備える移動体 |
| WO2019193642A1 (ja) * | 2018-04-03 | 2019-10-10 | 株式会社自律制御システム研究所 | 無人航空機用の自己位置推定装置及び自己位置推定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112022001481T5 (de) | 2024-01-11 |
| JP7753356B2 (ja) | 2025-10-14 |
| JPWO2022239600A1 (https=) | 2022-11-17 |
| US20240054612A1 (en) | 2024-02-15 |
| CN117280247A (zh) | 2023-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6029446B2 (ja) | 自律飛行ロボット | |
| JP6195450B2 (ja) | 自律飛行ロボット | |
| JP5990453B2 (ja) | 自律移動ロボット | |
| KR102460225B1 (ko) | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 | |
| Loianno et al. | Cooperative localization and mapping of MAVs using RGB-D sensors | |
| JP6140458B2 (ja) | 自律移動ロボット | |
| JP6235213B2 (ja) | 自律飛行ロボット | |
| Queralta et al. | Fpga-based architecture for a low-cost 3d lidar design and implementation from multiple rotating 2d lidars with ros | |
| US11504608B2 (en) | 6DoF inside-out tracking game controller | |
| EP3346287A1 (en) | Motion detection device and three-dimensional shape measurement device using same | |
| JP6527726B2 (ja) | 自律移動ロボット | |
| JP6014484B2 (ja) | 自律移動ロボット | |
| US20210229810A1 (en) | Information processing device, flight control method, and flight control system | |
| JP2014123306A (ja) | 自律飛行ロボット | |
| JP6758068B2 (ja) | 自律移動ロボット | |
| JP6530212B2 (ja) | 自律移動ロボット | |
| JP7753356B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP2016181177A (ja) | 自律移動ロボット | |
| JP2021047744A (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| Stowers et al. | Optical flow for heading estimation of a quadrotor helicopter | |
| US12146964B2 (en) | Image processing method, image processing apparatus, and image processing program | |
| CN116952229A (zh) | 无人机定位方法、装置、系统和存储介质 | |
| WO2021117388A1 (ja) | 移動体、制御装置、及び撮像方法 | |
| HK1259865A1 (en) | Laser scanning system, laser scanning method, moving laser scanning system, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22807303 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE1 | Request for preliminary examination filed after expiration of 19th month from priority date (pct application filed from 20040101) | ||
| WWE | Wipo information: entry into national phase |
Ref document number: 202280032497.8 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023520937 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112022001481 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22807303 Country of ref document: EP Kind code of ref document: A1 |