WO2022162861A1 - 乗員判定装置及び乗員判定方法 - Google Patents
乗員判定装置及び乗員判定方法 Download PDFInfo
- Publication number
- WO2022162861A1 WO2022162861A1 PCT/JP2021/003196 JP2021003196W WO2022162861A1 WO 2022162861 A1 WO2022162861 A1 WO 2022162861A1 JP 2021003196 W JP2021003196 W JP 2021003196W WO 2022162861 A1 WO2022162861 A1 WO 2022162861A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- occupant
- unit
- detection
- detection unit
- determination device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/0153—Passenger detection systems using field detection presence sensors
- B60R21/01534—Passenger detection systems using field detection presence sensors using electromagneticwaves, e.g. infrared
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/52—Discriminating between fixed and moving objects or between objects moving at different speeds
- G01S13/56—Discriminating between fixed and moving objects or between objects moving at different speeds for presence detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/50—Systems of measurement, based on relative movement of the target
- G01S15/52—Discriminating between fixed and moving objects or between objects moving at different speeds
- G01S15/523—Discriminating between fixed and moving objects or between objects moving at different speeds for presence detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
- G01S7/415—Identification of targets based on measurements of movement associated with the target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/539—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
- G01S7/417—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section involving the use of neural networks
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING SYSTEMS, e.g. PERSONAL CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/18—Status alarms
- G08B21/22—Status alarms responsive to presence or absence of persons
Definitions
- the present disclosure relates to an occupant determination device and an occupant determination method.
- the present disclosure has been made in view of the problems described above, and aims to provide a technique capable of improving the accuracy of determination of occupants in the interior of a vehicle.
- the occupant determination device includes an acquisition unit that acquires reflected waves generated by reflection of waves, which are radio waves or ultrasonic waves, in the interior of a vehicle, and based on the reflected waves acquired by the acquisition unit, A size detection unit that detects the size of a moving object, an occupant detection unit that detects whether or not an occupant is in the room based on a reflected wave acquired by the acquisition unit from reflected waves, and detection results of the size detection unit. and a control unit that determines whether a predetermined passenger is in the room based on the detection result of the passenger detection unit.
- FIG. 1 is a block diagram showing the configuration of an occupant determination device according to Embodiment 1;
- FIG. 4 is a diagram for explaining a size detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining an occupant detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining an occupant detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining an occupant detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining an occupant detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining an occupant detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining the position of an acquisition unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining a size detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining an occupant detection unit according to Embodiment 1;
- FIG. 4 is a diagram for explaining an
- FIG. 11 is a block diagram showing a hardware configuration of an occupant determination device according to another modified example
- FIG. 11 is a block diagram showing a hardware configuration of an occupant determination device according to another modified example
- FIG. 11 is a block diagram showing the configuration of a server according to another modified example
- FIG. 11 is a block diagram showing the configuration of a communication terminal according to another modified example
- FIG. 1 is a block diagram showing the configuration of an occupant determination device 1 according to the first embodiment.
- the occupant determination device 1 of FIG. 1 is a block diagram showing the configuration of an occupant determination device 1 according to the first embodiment.
- the occupant determination device 1 of FIG. 1 is a block diagram showing the configuration of an occupant determination device 1 according to the first embodiment.
- the acquisition unit 11 acquires reflected waves generated by reflection of waves in the interior of the vehicle.
- the wave motion of the acquisition unit 11 may be, for example, radio waves such as millimeter waves, or may be ultrasonic waves.
- the acquisition unit 11 may be, for example, a millimeter wave radar including a radar module having an array antenna for outputting and receiving waves, or an equivalent ultrasonic radar. In the first embodiment, the acquisition unit 11 is described as being a radar capable of outputting waves, but the acquisition unit 11 is not limited to this.
- the acquisition unit 11 acquires the reflected waves generated by the wave being reflected one or more times from various angles, thereby detecting the intensity of the reflected waves at various angles.
- the angle at which the acquisition unit 11 acquires the reflected wave will be described as an “acquisition angle”.
- the size detection unit 12 performs first detection for detecting the size of a moving object in the interior of the vehicle based on the reflected wave acquired by the acquisition unit 11 .
- Moving objects include, for example, moving occupants and moving cargo. A specific example of the size detection unit 12 will be described below.
- the size detection unit 12 extracts reflected waves having intensities equal to or greater than a threshold value from the reflected waves acquired by the acquisition unit 11 at various acquisition angles, and based on the intensities of the reflected waves extracted at various acquisition angles, A distance between the acquisition unit 11 and the moving object is obtained.
- the threshold here is set to, for example, the intensity of the wave reflected once.
- the size detection unit 12 generates a three-dimensional image with the acquisition unit 11 as a viewpoint based on the distances between the acquisition unit 11 and the moving object obtained for various acquisition angles.
- the size detection unit 12 detects the size of a moving object from a portion of the generated three-dimensional image that has a high passenger probability, which is the probability that a passenger exists.
- the cross-section of the vehicle seat is schematically indicated by two rectangles, and the high occupancy probability portion is set along the seat.
- a size detection unit 12 it is possible to detect the size and position of a moving object when the movement of the moving object is large. However, it is difficult for the size detection unit 12 to detect a moving object when the movement of the moving object in the room is small. It is difficult to distinguish whether it is a thing or a thing. In addition, since the size detection unit 12 performs detection using the wave that is reflected once, an area where the wave does not reach exists as a blind area in the detection of the size detection unit 12 .
- the occupant detection unit 13 in FIG. 1 detects the occupant of the vehicle based on the learning of the reflected waves (hereinafter sometimes referred to as “multiple reflected waves”) acquired by the acquisition unit 11 due to the waves being reflected multiple times. Detect whether or not the user is in the room. A specific example of the occupant detection unit 13 will be described below.
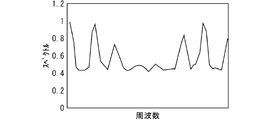
- the occupant detection unit 13 obtains the frequency spectrum of the multiple reflected waves.
- the frequency spectrum of the multiple reflected waves includes the spectrum of the Doppler frequency, etc., and reflects various motions of moving objects in the interior of the vehicle.
- 3 to 5 are diagrams showing examples of frequency spectra of multiple reflected waves.
- the frequency spectrum in FIG. 3 reflects the infant's breathing and limb movements
- the frequency spectrum in FIG. 4 reflects the shaking of the vehicle
- the frequency spectrum in FIG. 5 reflects the vibration of the smartphone that is the load. there is In this way, the frequency spectrum of the multiple reflected waves differs depending on the moving object.
- the occupant detection unit 13 detects whether or not the occupant is inside the vehicle based on the learning of the frequency spectrum of the multiple reflected waves.
- Machine learning for example, is used for learning.
- 6 and 7 are diagrams showing examples of learning results of the occupant detection unit 13. FIG. As the learning time or the number of learning times of the frequency spectrum of the moving object increases, the likelihood that there is an infant indoors increases in FIG. 6, and the likelihood that there is an indoor smartphone increases in FIG.
- the occupant detection unit 13 can detect the movement of the occupant that is smaller than the movement of the occupant that can be detected by the size detection unit 12 .
- the occupant detection unit 13 can detect the occupant both in the detection area of the size detection unit 12 and in the blind spot area. That is, the occupant detection unit 13 can detect whether or not there is an occupant in at least the blind spot area of the size detection unit 12 in the room.
- the blind spot area of the size detection unit 12 includes, for example, the area on the floor between the front and rear seats of the vehicle, the area above the child seat installed facing rearward, and the luggage compartment in the rear part of the interior of the vehicle. areas, etc. are assumed.
- the occupant detection unit 13 is not limited to the above. may be configured.
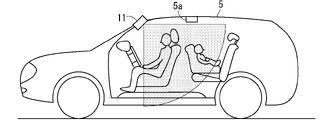
- the acquisition unit 11 is preferably provided in the upper part of the front part of the interior of the vehicle.
- the upper part of the front part of the interior of the vehicle is, for example, the overhead console of the vehicle and the upper part of the windshield of the vehicle.
- the acquisition unit 11 can receive reflected waves that reach a wide range in the room, so the blind spot area of the occupant detection unit 13 can be reduced.
- the traveling direction of the wave before reflection output from the acquisition unit 11 is set so as to avoid projections 5a on the ceiling 5 inside the vehicle, for example, opening and closing windows and switches of the sunroof of the vehicle. preferably.
- the acquisition unit 11 can receive reflected waves that reach a wide range in the room, so the blind spot area of the occupant detection unit 13 can be reduced.
- FIG. 8 shows that the direction of travel is provided to avoid the protrusion 5a in the cross section of the vehicle, the direction of travel in the plane (not shown) of the ceiling portion 5 of the vehicle is the same as that of the protrusion 5a. may be provided to avoid
- the control unit 14 in FIG. 1 determines whether a predetermined occupant is in the room based on the detection result of the size detection unit 12 and the detection result of the occupant detection unit 13 .
- Predetermined occupants include, for example, at least one of healthy adults, infants, and care recipients. A specific example of determination by the control unit 14 will be described below.
- control unit 14 determines that the size of the moving object is equal to or larger than the threshold based on the detection result of the size detection unit 12, regardless of the detection result of the occupant detection unit 13, the control unit 14 determines that the moving object is a healthy adult. judge.
- the control unit 14 determines that the moving object is an infant that wakes up and moves, or a moving object such as a PET bottle filled with water. It is judged to be a load. In this case, when the occupant detection unit 13 detects that the occupant is in the room, the control unit 14 determines that the moving infant is in the room, and the occupant detection unit 13 detects that the occupant is not in the room. If so, it is determined that there is a moving load in the room.
- the control unit 14 makes the above determination for each of the plurality of moving objects.
- the control unit 14 determines that either an infant or a person being assisted is present. Cases in which such a determination is made include cases in which either an infant or a care recipient whose movements are small due to sleep or the like are present in the detection area of the size detection unit 12, and an infant in the blind spot area of the size detection unit 12. It is assumed that there is one of the care receiver and the care recipient.
- the control unit 14 determines that the occupant is not in the room.
- the notification unit 21 associated with the vehicle notifies the user of the vehicle using display and sound, etc., and notifies the communication terminal of the user of the vehicle using wireless communication.
- the occupant determination device 1 does not include the notification unit 21
- the occupant determination device 1 may include the notification unit 21 .
- the notification unit 21 may or may not be provided in the vehicle.
- the control unit 14 controls the notification of the notification unit 21 based on the determination result.
- the timing of notification by the notification unit 21 is, for example, when the vehicle doors are locked, or when a predetermined time has passed since the vehicle doors were locked.
- the notification unit 21 notifies control off.
- the control unit 14 determines that at least one of the infant and the person being assisted is in the room, the control unit 14 controls the notification of the notification unit 21 to ON.
- FIG. 9 is a flow chart showing the operation of the occupant determination device 1 according to the first embodiment.
- step S1 it is determined whether or not the ignition of the vehicle has been turned on. If it is determined that the ignition has been turned on, the process proceeds to step S2, and if it is determined that the ignition has not been turned on, the process of step S1 is performed again.
- the acquisition unit 11 acquires the reflected wave.
- step S3 the control unit 14 determines whether the size detection unit 12 has detected a moving object. If it is determined that the size detection unit 12 has detected a moving object, the process proceeds to step S4, and if it is determined that the size detection unit 12 has not detected a moving object, the process proceeds to step S8.
- step S4 the control unit 14 determines whether or not the moving body includes a healthy adult based on the detection result of the size detection unit 12. If the moving body is determined to include a healthy adult, the process proceeds to step S7, and if the moving body is not determined to include a healthy adult, the process proceeds to step S5.
- step S5 the control unit 14 determines whether or not the occupant detection unit 13 has detected that the occupant is inside the vehicle.
- the occupant detection unit 13 detects that the occupant is in the room, it is determined that a moving infant is in the room, and the process proceeds to step S6. If it is not detected that the occupant is inside the cabin, it is determined that there is a moving load inside the cabin, and the process proceeds to step S7.
- step S6 the control unit 14 controls the notification of the notification unit 21 to ON. After that, the operation of FIG. 9 ends.
- step S7 the control unit 14 controls the notification of the notification unit 21 to be off. After that, the operation of FIG. 9 ends.
- step S8 the control unit 14 determines whether or not the occupant detection unit 13 has detected that the occupant is inside the vehicle. When the occupant detection unit 13 detects that the occupant is in the room, it is determined that either the infant or the person being assisted is present in either the detection area of the size detection unit 12 or the blind spot area, and the process is executed. Go to step S6. If it is not detected that the occupant is in the room, it is determined that the occupant is not in the room, and the process proceeds to step S7.
- the occupant determination device 1 includes the size detection unit 12 that detects the size of a moving object in the room based on the reflected wave acquired by the acquisition unit 11, Based on the occupant detection unit 13 that detects whether or not the occupant is in the room based on the learning of the reflected wave acquired by the acquisition unit 11, the detection result of the size detection unit 12, and the detection result of the occupant detection unit 13 and a control unit 14 for determining whether a predetermined occupant is in the room.
- the occupant in the blind spot area of the size detection unit 12 can be detected by the occupant detection unit 13, so it is possible to improve the accuracy of determining the presence or absence of the occupant.
- the type of occupant can also be determined.
- the notification unit 21 control to turn off notifications. Further, the control unit 14 determines that the moving object is an infant or a load based on the detection result of the size detection unit 12, and when the occupant detection unit 13 detects that the occupant is not in the room, the notification unit 21 notification is turned off. According to such a configuration, unnecessary notifications can be suppressed.
- the acquisition unit 11, the size detection unit 12, the occupant detection unit 13, and the control unit 14 shown in FIG. 1 are hereinafter referred to as "the acquisition unit 11 and the like".
- the acquisition unit 11 and the like are realized by the processing circuit 81 shown in FIG. That is, the processing circuit 81 includes an acquisition unit 11 that acquires reflected waves generated by reflection of waves, which are radio waves or ultrasonic waves, in the interior of the vehicle, and based on the reflected waves acquired by the acquisition unit 11, A size detection unit 12 for detecting the size of a moving object, an occupant detection unit 13 for detecting whether or not an occupant is in the room based on the reflected wave acquired by the acquisition unit 11 from reflected waves, and a size detection unit.
- a control unit 14 that determines whether or not a predetermined occupant is in the room.
- Dedicated hardware may be applied to the processing circuit 81, or a processor that executes a program stored in a memory may be applied.
- Processors include, for example, central processing units, processing units, arithmetic units, microprocessors, microcomputers, and DSPs (Digital Signal Processors).
- the processing circuit 81 may be, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC (Application Specific Integrated Circuit), an FPGA (Field Programmable Gate Array), or a combination of these.
- Each function of each unit such as the acquisition unit 11 may be realized by a circuit in which processing circuits are distributed, or the functions of each unit may be collectively realized by one processing circuit.
- the processing circuit 81 When the processing circuit 81 is a processor, the functions of the acquisition unit 11 and the like are realized by combining with software and the like.
- Software and the like correspond to, for example, software, firmware, or software and firmware.
- Software or the like is written as a program and stored in memory.
- a processor 82 applied to a processing circuit 81 reads out and executes a program stored in a memory 83 to realize the function of each section.
- a step of acquiring a reflected wave generated by reflection of a wave that is an electric wave or an ultrasonic wave in the interior of the vehicle and a step of performing a first detection of detecting the size of a moving object in the room, and a step of performing a second detection of detecting whether or not an occupant is in the room, based on the reflected wave obtained by reflecting the wave.
- a memory 83 is provided for In other words, it can be said that this program causes a computer to execute the procedures and methods of the acquisition unit 11 and the like.
- the memory 83 is, for example, a non-volatile or Volatile semiconductor memory, HDD (Hard Disk Drive), magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disc), their drive devices, etc., or any storage medium that will be used in the future.
- HDD Hard Disk Drive
- magnetic disk flexible disk
- optical disk compact disk
- mini disk mini disk
- DVD Digital Versatile Disc
- their drive devices etc., or any storage medium that will be used in the future.
- each function of the acquisition unit 11 and the like is realized by either hardware or software has been described above.
- the configuration is not limited to this, and a configuration in which a part of the acquisition unit 11 and the like is realized by dedicated hardware and another part is realized by software or the like may be employed.
- the function of the acquisition unit 11 is realized by a processing circuit 81 as dedicated hardware, an interface and a receiver, etc., and the processing circuit 81 as a processor 82 reads out the program stored in the memory 83 for the others. It is possible to realize the function by executing it.
- the processing circuit 81 can implement each of the functions described above by means of hardware, software, etc., or a combination thereof.
- the occupant determination device 1 described above includes a vehicle device such as a PND (Portable Navigation Device), a navigation device and a DMS (Driver Monitoring System), a communication terminal including a mobile terminal such as a mobile phone, a smartphone, and a tablet
- vehicle device such as a PND (Portable Navigation Device), a navigation device and a DMS (Driver Monitoring System)
- a communication terminal including a mobile terminal such as a mobile phone, a smartphone, and a tablet
- the present invention can also be applied to an occupant determination system constructed as a system by appropriately combining functions of an application installed in at least one of a vehicle device and a communication terminal and a server.
- each function or each component of the occupant determination device 1 described above may be arranged dispersedly in each device constituting the system, or may be centrally arranged in one of the devices. good.
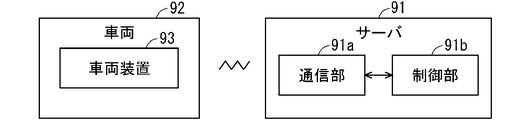
- FIG. 12 is a block diagram showing the configuration of the server 91 according to this modified example.
- a server 91 in FIG. 12 includes a communication unit 91a and a control unit 91b, and is capable of wireless communication with a vehicle device 93 such as a DMS device of a vehicle 92 .
- the communication unit 91a which is an acquisition unit, receives the reflected wave information acquired by the vehicle device 93 by performing wireless communication with the vehicle device 93.
- a processor (not shown) of the server 91 or the like executes a program stored in a memory (not shown) of the server 91 so that the control unit 91b is similar to the size detection unit 12, the occupant detection unit 13, and the control unit 14 in FIG. have a function. That is, the control unit 91b performs the first detection and the second detection, and determines whether a predetermined passenger is in the vehicle 92 based on the detection result of the first detection and the detection result of the second detection. . Then, the communication unit 91 a transmits the determination result of the control unit 91 b to the vehicle device 93 . According to the server 91 configured in this manner, the same effect as the occupant determination device 1 described in the first embodiment can be obtained.
- FIG. 13 is a block diagram showing the configuration of a communication terminal 96 according to this modified example.
- a communication terminal 96 of FIG. 13 includes a communication unit 96a similar to the communication unit 91a and a control unit 96b similar to the control unit 91b, and can perform wireless communication with a vehicle device 98 of a vehicle 97. ing.
- the communication terminal 96 for example, a portable terminal such as a mobile phone, a smart phone, or a tablet carried by the driver of the vehicle 97 is applied. According to the communication terminal 96 configured in this way, it is possible to obtain the same effects as those of the occupant determination device 1 described in the first embodiment.
- 1 occupant determination device 5 ceiling part, 5a projection, 11 acquisition part, 12 size detection part, 13 occupant detection part, 14 control part, 21 notification part.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Acoustics & Sound (AREA)
- Mechanical Engineering (AREA)
- Geophysics And Detection Of Objects (AREA)
- Emergency Alarm Devices (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/003196 WO2022162861A1 (ja) | 2021-01-29 | 2021-01-29 | 乗員判定装置及び乗員判定方法 |
| JP2022577941A JP7258260B2 (ja) | 2021-01-29 | 2021-01-29 | 乗員判定装置及び乗員判定方法 |
| DE112021005616.6T DE112021005616B4 (de) | 2021-01-29 | 2021-01-29 | Insassenbestimmungsvorrichtung |
| US18/036,256 US20230408679A1 (en) | 2021-01-29 | 2021-01-29 | Occupant determination apparatus and occupant determination method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/003196 WO2022162861A1 (ja) | 2021-01-29 | 2021-01-29 | 乗員判定装置及び乗員判定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022162861A1 true WO2022162861A1 (ja) | 2022-08-04 |
Family
ID=82652808
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/003196 Ceased WO2022162861A1 (ja) | 2021-01-29 | 2021-01-29 | 乗員判定装置及び乗員判定方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230408679A1 (https=) |
| JP (1) | JP7258260B2 (https=) |
| DE (1) | DE112021005616B4 (https=) |
| WO (1) | WO2022162861A1 (https=) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024121957A1 (ja) * | 2022-12-07 | 2024-06-13 | 三菱電機株式会社 | 生体検知装置、電波センサ、生体検知システム、および、生体検知方法 |
| WO2025262767A1 (ja) * | 2024-06-18 | 2025-12-26 | 三菱電機株式会社 | 警報制御装置および警報制御方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020136748A (ja) * | 2019-02-14 | 2020-08-31 | 日本電産モビリティ株式会社 | 乗員監視装置 |
| JP2020148757A (ja) * | 2019-03-11 | 2020-09-17 | パナソニックIpマネジメント株式会社 | レーダー装置および車両 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6442504B1 (en) * | 1995-06-07 | 2002-08-27 | Automotive Technologies International, Inc. | Apparatus and method for measuring weight of an object in a seat |
| US20090046538A1 (en) * | 1995-06-07 | 2009-02-19 | Automotive Technologies International, Inc. | Apparatus and method for Determining Presence of Objects in a Vehicle |
| US6330501B1 (en) * | 1995-06-07 | 2001-12-11 | Automotive Technologies International Inc. | Methods for identifying and classifying objects in a vehicle and methods for adjusting a vehicle component incorporating the same |
| JP2019123354A (ja) | 2018-01-16 | 2019-07-25 | 株式会社デンソー | 乗員検知装置 |
| US11543511B2 (en) | 2019-03-11 | 2023-01-03 | Panasonic Intellectual Property Management Co., Ltd. | Radar apparatus and vehicle |
| US11345415B2 (en) * | 2019-03-14 | 2022-05-31 | lEE INTERNATIONAL ELECTRONICS & ENGINEERING S.A. | Vehicle occupant detection |
| US12145596B2 (en) | 2020-05-20 | 2024-11-19 | Mitsubishi Electric Corporation | Cabin-inside detection device and cabin-inside detection method |
-
2021
- 2021-01-29 JP JP2022577941A patent/JP7258260B2/ja active Active
- 2021-01-29 WO PCT/JP2021/003196 patent/WO2022162861A1/ja not_active Ceased
- 2021-01-29 US US18/036,256 patent/US20230408679A1/en active Pending
- 2021-01-29 DE DE112021005616.6T patent/DE112021005616B4/de active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020136748A (ja) * | 2019-02-14 | 2020-08-31 | 日本電産モビリティ株式会社 | 乗員監視装置 |
| JP2020148757A (ja) * | 2019-03-11 | 2020-09-17 | パナソニックIpマネジメント株式会社 | レーダー装置および車両 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024121957A1 (ja) * | 2022-12-07 | 2024-06-13 | 三菱電機株式会社 | 生体検知装置、電波センサ、生体検知システム、および、生体検知方法 |
| JPWO2024121957A1 (https=) * | 2022-12-07 | 2024-06-13 | ||
| WO2025262767A1 (ja) * | 2024-06-18 | 2025-12-26 | 三菱電機株式会社 | 警報制御装置および警報制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112021005616T5 (de) | 2023-09-07 |
| JP7258260B2 (ja) | 2023-04-14 |
| US20230408679A1 (en) | 2023-12-21 |
| JPWO2022162861A1 (https=) | 2022-08-04 |
| DE112021005616B4 (de) | 2025-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11709242B2 (en) | Method for detecting a living being on a seat of a vehicle, detection arrangement and vehicle | |
| US10459080B1 (en) | Radar-based object detection for vehicles | |
| US12145596B2 (en) | Cabin-inside detection device and cabin-inside detection method | |
| JP2019168379A (ja) | 生体検知システム | |
| JP7258260B2 (ja) | 乗員判定装置及び乗員判定方法 | |
| CN110114246A (zh) | 3d飞行时间有源反射感测系统和方法 | |
| JP2020134184A (ja) | 乗員検出装置 | |
| JP7735565B2 (ja) | 車両搭乗者の身体部位を窓から出したことを検出する方法、装置及び車両 | |
| US20190135179A1 (en) | Vehicle and control method thereof | |
| WO2021240777A1 (ja) | 乗員検出装置および乗員検出方法 | |
| KR102882431B1 (ko) | 차량의 레이더 제어 장치 및 그 방법 | |
| US10422874B2 (en) | Method and system for spatial modeling of an interior of a vehicle | |
| JP6701739B2 (ja) | 車両制御装置 | |
| JP7552645B2 (ja) | 乗員検知装置及びプログラム | |
| US12376582B2 (en) | Mosquito repellent system and method for operating the same | |
| US12555392B2 (en) | Apparatus for detecting object in vehicle and method thereof | |
| WO2024028102A1 (en) | Method and system for detecting presence of life in a vehicle | |
| JP6645416B2 (ja) | 乗員検出装置、乗員検出システム、乗員検出方法 | |
| US11915574B2 (en) | Alert system to output alert about occupant left in vehicle | |
| US11673559B2 (en) | Disembarkation action determination device, vehicle, disembarkation action determination method, and non-transitory storage medium stored with program | |
| KR20240082864A (ko) | 후석 감지 장치 및 후석 감지 방법 | |
| JPWO2022162861A5 (https=) | ||
| JP7275409B2 (ja) | 乗員状態判定装置および乗員状態判定方法 | |
| Lupinska-Dubicka et al. | Vehicle passengers detection for onboard ecall-compliant devices | |
| JP7778250B2 (ja) | 置き去り判定システム、置き去り判定装置、および、置き去り判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21922877 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022577941 Country of ref document: JP Kind code of ref document: A |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21922877 Country of ref document: EP Kind code of ref document: A1 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 112021005616 Country of ref document: DE |