WO2022071395A1 - タイヤ試験装置 - Google Patents
タイヤ試験装置 Download PDFInfo
- Publication number
- WO2022071395A1 WO2022071395A1 PCT/JP2021/035867 JP2021035867W WO2022071395A1 WO 2022071395 A1 WO2022071395 A1 WO 2022071395A1 JP 2021035867 W JP2021035867 W JP 2021035867W WO 2022071395 A1 WO2022071395 A1 WO 2022071395A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- test
- carriage
- tire
- road surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/007—Wheeled or endless-tracked vehicles
- G01M17/02—Tyres
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/007—Wheeled or endless-tracked vehicles
- G01M17/02—Tyres
- G01M17/022—Tyres the tyre co-operating with rotatable rolls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60C—VEHICLE TYRES; TYRE INFLATION; TYRE CHANGING; CONNECTING VALVES TO INFLATABLE ELASTIC BODIES IN GENERAL; DEVICES OR ARRANGEMENTS RELATED TO TYRES
- B60C19/00—Tyre parts or constructions not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60C—VEHICLE TYRES; TYRE INFLATION; TYRE CHANGING; CONNECTING VALVES TO INFLATABLE ELASTIC BODIES IN GENERAL; DEVICES OR ARRANGEMENTS RELATED TO TYRES
- B60C25/00—Apparatus or tools adapted for mounting, removing or inspecting tyres
- B60C25/002—Inspecting tyres
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/007—Wheeled or endless-tracked vehicles
- G01M17/013—Wheels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/007—Wheeled or endless-tracked vehicles
- G01M17/02—Tyres
- G01M17/021—Tyre supporting devices, e.g. chucks
Definitions
- the present invention relates to a tire test device.
- Tests to evaluate the performance of tires include road tests conducted by mounting test tires on the wheel rims of dedicated test vehicles and running on actual road surfaces, and indoor tests conducted using test equipment installed indoors. There is a (tabletop test). The bench test is superior in repeatability as compared with the road test.
- Patent Document 1 describes an example of a test device used for a tabletop test of a tire.
- the test apparatus described in Patent Document 1 is provided with a rotating drum provided with a simulated road surface on the outer peripheral surface, and the test tire and the drum are rotated in a state where the test tire is in contact with the simulated road surface to perform a test.
- the present invention has been made in view of the above circumstances, and an object of the present invention is to provide a tire test apparatus capable of performing a bench test on various road surface conditions.
- the road surface is provided with a carriage that rotatably holds the test wheel on which the test tire is mounted and can travel along the road surface with the test tire in contact with the road surface.
- the carriage is provided with an axle portion that rotatably supports the test wheel and an alignment portion that can adjust the wheel alignment of the test wheel by changing the direction of the axle portion, and the alignment portion adjusts the height of the axle portion.
- a load adjustment unit that can adjust the load applied to the test wheel by changing it is provided, and the load adjustment unit is a linear guide that guides the vertical movement of the first movable frame and the first movable frame that are supported so as to be movable up and down.
- a tire test device including a first drive unit that drives the first movable frame up and down.
- the linear guide includes a rail and a first traveling portion capable of traveling on the rail, and one of the rail and the first traveling portion is fixed to the first movable frame. May be.
- the carriage may be configured to include a main frame having a hut-shaped alignment mechanism support portion for accommodating the alignment portion.
- the other of the rail and the first traveling portion may be fixed to the alignment mechanism support portion.
- the alignment unit includes a camber adjustment unit that can adjust the camber angle of the test wheel, and the camber adjustment unit is rotatably supported around the E ⁇ axis parallel to the traveling direction of the carriage. It may be configured to include a second movable frame and a ⁇ drive unit that rotationally drives the second movable frame around the E ⁇ axis.
- the camber adjusting unit includes a columnar first pivot arranged coaxially with the E ⁇ axis and a first bearing that rotatably supports the first pivot, and includes the first pivot and the first pivot.
- One of the first bearings may be fixed to the second movable frame.
- the other of the first pivot and the first bearing may be fixed to the first movable frame.
- the camber adjusting unit may be configured to include a curved guide for guiding the rotation of the second movable frame.
- the curved guide includes an arcuate curved rail arranged concentrically with the E ⁇ axis and a second traveling portion capable of traveling on the rail, and the curved rail and the second traveling portion. One of them may be fixed to the second movable frame.
- the alignment unit includes a slip angle adjusting unit capable of adjusting the slip angle of the test wheel, and the slip angle adjusting unit is aligned with the E ⁇ axis and the E ⁇ axis, which are the rotation axes of the test wheel.
- the configuration may include a third movable frame rotatably supported around an orthogonal E ⁇ axis, and a ⁇ drive unit that is rotationally driven around the third movable frame E ⁇ axis.
- the slip angle adjusting unit includes a columnar second pivot arranged coaxially with the E ⁇ axis and a second bearing that rotatably supports the second pivot, and the second pivot. And one of the second bearings may be fixed to the third movable frame.
- the axle includes a spindle, a third bearing that rotatably supports the spindle, and a wheel hub coaxially attached to the tip of the spindle to which a test wheel is attached. It may be configured.
- a guide mechanism for guiding the movement of the carriage in the traveling direction includes a rail extending in the traveling direction of the carriage and a runner fixed to the carriage and capable of traveling on the rail.
- the runner comprises a roller that can roll on a rail and a bearing that rotatably supports the roller, and the bearing is a rolling bearing with a rolling element that rolls on a circular orbit. May be good.
- the runner includes a plurality of rollers, the first roller capable of rolling on the upper surface of the head of the rail and the second roller capable of rolling on the lower surface of the head of the rail.
- a roller and a third roller capable of rolling on the side surface of the head of the rail.
- a plurality of rollers are grouped into a plurality of sets, and a plurality of sets of rollers are arranged in the traveling direction of the carriage, and the first roller, the second roller, and the third roller are arranged, respectively.
- the runner comprises a frame mounted on the carriage and a plurality of rods supported by the frame, and the bearings are fitted to the inner ring fitted to the rod and the inner peripheral surface of the roller.
- It may be configured to include the outer ring and a plurality of rolling elements interposed between the outer peripheral surface of the inner ring and the inner peripheral surface of the outer ring.
- a plurality of guide mechanisms including a first guide mechanism and a second guide mechanism in which rails are arranged in parallel with each other are provided, and each of the first guide mechanism and the second guide mechanism is provided. At least one of the second roller and the third roller may be arranged between the rails of the first guide mechanism and the second guide mechanism.
- the rails of the first guide mechanism and the second guide mechanism are provided with a plurality of guide mechanisms including a first guide mechanism and a second guide mechanism in which rails are arranged in parallel with each other.
- a road surface portion having a road surface may be provided, and at least a part of the road surface portion may be composed of a replaceable road surface unit.
- the road surface portion includes a base and a pavement portion provided on the base and a road surface is formed on the surface thereof, and at least a part of the pavement portion is composed of at least one road surface unit. It may be a pavement.
- the road surface portion includes a main body portion having a base material and a pavement portion provided on the base material and having a road surface formed on the surface thereof, and at least a part of the main body portion is at least one. It may be configured as a road surface unit.
- the road surface portion may be configured to include a frame portion that forms a tank together with the base.
- the road surface may be configured to be a simulated road surface formed of a material different from the road surface of the actual road.
- the above tire test apparatus may be configured to include a drive system for driving the test wheel and the carriage.
- the drive system may be configured to include a carriage driving means for driving the carriage at a predetermined speed with respect to the road surface.
- the drive system may be configured to include a test wheel driving means for driving the test wheels.
- the test wheel driving means may be configured to drive the test wheel at a rotation speed corresponding to a predetermined speed.
- the drive system may be configured to include a first power generation means for generating power used for driving a carriage and a test wheel.
- the drive system may be configured to include a power distribution means for distributing the power generated by the first power generation means to the carriage drive means and the test wheel drive means.
- the drive system may be configured to include a first winding transmission mechanism for transmitting the power generated by the first power generating means.
- the first winding transmission mechanism is a drive pulley coupled to the output shaft of the first power generating means, a driven pulley held by the carriage and connected to the test wheel, a drive pulley and a driven pulley.
- a first portion and a second winding mediating node comprising a first winding mediating node hung on a pulley, wherein the first winding mediating node is stretched in the traveling direction of the carriage and driven in opposite directions to each other. It may have a portion, pass through a driven pulley in the first portion, and be fixed to the carriage in the second portion.
- the drive system is connected to the first winding transmission mechanism to transmit at least a part of the power transmitted by the first winding transmission mechanism to the drive wheels. It may be configured to include.
- the driven pulley may be coupled to the input shaft of the secondary power transmission unit.
- the drive system comprises a pair of first power generation means, and the first winding transmission mechanism is coupled to the output shafts of the pair of first power generation means, respectively.
- the first winding mediation node may form a loop and be hung on a pair of drive pulleys and a driven pulley.
- the first winding mediation node may be a toothed belt having a core wire of a steel wire.
- the first winding mediation node may be configured to be a toothed belt having a carbon core wire.
- the above tire test apparatus may be configured to include a base to which rails are attached.
- the test wheel driving means may be configured to include a second power generating means for generating power for rotationally driving the test wheels.
- the test wheel driving means may be configured to include a power coupling means for coupling the power generated by the first power generating means and the second power generating means.
- the first power generating means includes the first motor installed on the base
- the second power generating means includes the second motor installed on the carriage. May be.
- the test wheel driving means changes the phase of the rotary motion supply means for supplying the rotary motion of the rotation speed corresponding to the speed of the carriage and the rotary motion supplied from the rotary motion supply means. It may be configured to include a torque applying means for applying a predetermined torque to the test wheel.
- the rotary motion supply means may be provided with a first motor installed on the base, and the torque applying means may be provided with a second motor installed on the carriage.
- the torque applying means may be configured to include a power coupling means for coupling the power generated by the first motor and the power generated by the second motor.
- the torque applying means includes a rotating frame to which a second motor is attached and rotationally driven by the power generated by the first motor, and a shaft driven by the second motor.
- the shaft and the rotating frame may be arranged concentrically.
- the torque applying means includes a pair of bearing portions that rotatably support the rotating frame, and the rotating frame has a tubular shape, and a motor accommodating portion accommodating a second motor and a motor accommodating portion. It has a pair of shaft parts with a diameter smaller than that of the motor accommodating part, which are provided on both sides in the axial direction across the part, and is rotatably supported by a pair of bearing parts in the pair of shaft parts.
- the secondary power transmission unit connects the second shaft driven by the torque applying means, the bearing that rotatably supports the second shaft, and the second shaft and the spindle. It may be configured to include a sliding constant velocity joint.
- the test wheel drive means is installed on the carriage and the primary power transmission unit that transmits the power supplied from the rotary motion supply means, and is connected to the primary power transmission unit to be connected to the primary power transmission unit.
- the primary power transmission unit is equipped with a first winding transmission mechanism, and the first winding transmission mechanism is capable of traveling the carriage.
- the secondary power transmission unit is provided with a second winding transmission mechanism, and the second winding transmission mechanism is a drive pulley coupled with a movable pulley of the first winding transmission mechanism, and torque.
- the configuration may include a driven pulley coupled to the rotating frame of the granting means, a drive pulley of the second winding transmission mechanism, and a second winding mediation node hung on the driven pulley.
- the secondary power transmission unit is provided with a rotatably supported spindle, and the spindle is configured so that the test wheel can be coaxially attached to and detached from the tip portion thereof, and the force applied to the test wheel can be detected. It may be configured to be equipped with a force sensor.
- the carriage slides in a direction perpendicular to the road surface with respect to the main frame, a swivel frame capable of turning around a vertical line perpendicular to the road surface with respect to the main frame, and a main frame.
- a possible slide frame may be provided, and the spindle may be supported by the main frame via the swivel frame and the slide frame.
- the carriage may be configured to include a curved guideway that guides turning around the vertical line of the turning frame and a linear guideway that guides the movement of the slide frame in the vertical direction.
- the slide frame may be configured to rotatably support the spindle around a horizontal axis perpendicular to both the center line and the vertical line of the spindle.
- the carriage may be configured to include a load adjusting unit capable of adjusting the load applied to the test wheel by moving the slide frame in the vertical direction.
- the carriage may be configured to include a slip angle adjusting portion capable of adjusting the slip angle of the test wheel with respect to the road surface by turning the turning frame around a vertical line.
- the spindle may be rotationally moved around a horizontal axis to include a camber adjusting unit capable of adjusting the camber of the test wheel with respect to the road surface.
- a load detection unit for detecting the load distribution received by the tire tread of the test wheel may be provided on the upper surface of the road surface portion.
- the load detection unit may be configured to include a plurality of load detection modules arranged in a grid pattern in the traveling direction of the carriage and the axial direction of the test wheel.
- each load detection module may be configured to include a 3-component force sensor.
- the above tire test device is provided with a measuring means for measuring the load distribution based on the detection result by the load detecting unit, and the measuring means receives the radial force and the tangent line on the tire tread based on the detection result of the 3-component force sensor. It may be configured to calculate the force and the lateral force.
- the above tire test apparatus may be configured to include a storage means for storing the detected load distribution.
- a means for acquiring the traveling position of the test wheel in the traveling direction of the carriage is provided, and the storage means determines the detected load distribution and the traveling position of the test wheel when the load distribution is detected. It may be configured to store in association with each other.
- a means for acquiring the rotation position of the test wheel is provided, and the storage means stores the detected load distribution in association with the rotation position of the test wheel when the load distribution is detected. It may be configured.
- the storage means may be configured to store the load distribution detected at the same timing and the force applied to the test wheel in association with each other.
- a means for calculating the relative position of the load detection module based on the running position of the test wheel may be provided, and the measured value of the load distribution with respect to the relative position may be calculated.
- the measured value of the load distribution is calculated by detecting the load distribution multiple times while traveling the carriage and averaging the detection results of the multiple load distributions for each relative position. May be good.
- the measured value of the load distribution may be calculated by regression analysis.
- one set of measurement is performed by the load detector by traveling in one direction of the carriage, and the measured value of the load distribution is calculated based on the result of the measurement of multiple sets by the load detector. May be good.
- the above tire test apparatus may be configured to include means for changing the position of the load detection unit in the axial direction of the test wheel.
- the above tire test device may be configured to include means for changing the position of the load detecting unit in the traveling direction.
- the tabletop test of the tire can be performed under various road surface conditions.
- FIG. 13 is a cross-sectional view taken along the line AA of FIG.
- FIG. 13 is a cross-sectional view taken along the line BB of FIG. 13 is a cross-sectional view taken along the line CC of FIG.
- FIG. 19 is a view taken along the line AA of FIG. FIG.
- FIG. 19 is a view taken along the line BB in FIG.
- FIG. 19 is a view taken along the line CC of FIG.
- FIG. 19 is a view taken along the line DD of FIG.
- It is a figure which shows the schematic structure of the spindle part. It is a cross-sectional view of a road surface portion. It is a cross-sectional view of a modification of a road surface portion. It is a top view near the load detection part of the road surface part. It is a side view near the load detection part of the road surface part. It is a front view of the load detection part. It is a side view of the load detection part. It is a top view of the load detection part.
- FIG. 1 A flowchart showing a procedure for acquiring a load distribution applied to a tire tread. It is a flowchart which shows the procedure of load profile calculation. It is a top view which shows the arrangement relation of the rotation axis of a load detection module and a test wheel. This is a display example of the load profile. It is a block diagram which shows the schematic structure of a control system.
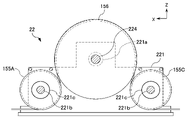
- 1 to 3 are a right side view, a plan view, and a rear view of the tire test apparatus 1 according to the embodiment of the present invention, in order.
- 4 and 5 are an enlarged right side view and a plan view of the main part of the tire test apparatus 1 in order.
- the direction from right to left is defined as the X-axis direction
- the direction from top to bottom is defined as the Y-axis direction
- the direction perpendicular to the paper surface from the back to the front is defined as the Z-axis direction.
- the X-axis direction and the Y-axis direction are horizontal directions orthogonal to each other, and the Z-axis direction is a vertical direction.
- each direction of front-back, left-right, and up-down is defined as each direction when the carriage 20 faces the traveling direction (X-axis positive direction).
- the positive direction of the X-axis is called the front
- the negative direction of the X-axis is the back
- the positive direction of the Y-axis is the left
- the negative direction of the Y-axis is the right
- the positive direction of the Z-axis is the top
- the negative direction of the Z-axis is the bottom.
- the side surface on the right side is the right side surface
- the side surface on the left side is the left side surface
- the tire test device 1 includes a track portion 10 elongated in the X-axis direction, a road surface portion 60, and a carriage 20 capable of traveling on the track portion 10 in the X-axis direction.
- the road surface portion 60 is placed on the left side portion of the base frame 11 (hereinafter abbreviated as “base 11”) of the track portion 10.
- base 11 On the upper surface of the road surface portion 60, a road surface 63a on which the test tire T mounted on the carriage 20 touches the ground is provided.
- the road surface portion 60 is detachably attached to the base 11 of the track portion 10 so that the road surface portion 60 can be replaced according to the test conditions.
- the base 11 of the track portion 10 and the frame 61 of the road surface portion 60 may be integrated by, for example, welding. Further, the road surface portion 60 may be installed directly on the foundation F (FIG. 3) to completely separate the road surface portion 60 from the track portion 10.
- a pair of bollards 13 are provided at the front end portion of the track portion 10 adjacent to the drive portions 14LB and 14RB described later.
- the bollard 13 is a device that collides with the carriage 20 and forcibly stops the carriage 20 when the carriage 20 overruns.
- Each bollard 13 is provided with a pair of hydraulic shock absorbers that mitigate the impact generated in the event of a collision with the carriage 20.
- a test wheel W (that is, a wheel rim Wr on which the test tire T is mounted) is attached to the carriage 20. During the test, the carriage 20 travels with the test wheel W in contact with the road surface 63a, and the test wheel W rolls on the road surface 63a.
- the track portion 10 includes a plurality of (three in the illustrated embodiment) guide mechanisms 12A, 12B, and 12C for guiding the movement of the carriage 20 in the X-axis direction.
- the guide mechanisms 12A, 12B and 12C are installed at the left end portion of the track portion 10, the central portion in the width direction (that is, the Y-axis direction), and the right end portion, respectively.
- FIG. 6 is a right side view of the guide mechanism 12A.
- 7 and 8 are cross-sectional views of the guide mechanisms 12A and 12B, respectively. Since the guide mechanism 12C is configured symmetrically with the guide mechanism 12A, detailed description of the guide mechanism 12C will be omitted.
- Each of the guide mechanisms 12A, 12B and 12C has one rail 121 forming a track extending in the X-axis direction and one or more traveling portions 122A (two in the illustrated embodiment) capable of traveling on the rail 121. (FIG. 7), 122B (FIG. 8) or 122C (not shown, configured symmetrically with the traveling portion 122A of the guide mechanism 12A). As shown in FIG. 6 for the traveling portion 122A, one of the two traveling portions 122A, 122B and 122C is attached to the front end portion of the bottom surface of the carriage 20, and the other is attached to the rear end portion. ..
- the rail 121 is laid on the base 11 of the track portion 10. Further, the traveling portions 122A, 122B and 122C are attached to the lower surface of the main frame 21 of the carriage 20.
- the rail 121 is a flat bottom rail having a head portion 121h, a bottom portion 121f wider than the head portion 121h, and a narrow abdomen 121w connecting the head portion 121h and the bottom portion 121f.
- the rail 121 of this embodiment is, for example, a Japanese Industrial Standard.
- Heat-treated rails conforming to JIS E 1120: 2007 (for example, heat-treated rails) 50N-HH340) with additional machining.
- the heat-treated rail is a rail for railways whose head is heat-treated to improve wear resistance.
- the traveling portion 122A of the guide mechanism 12A includes a frame 123 long in the X-axis direction attached to the lower surface of the main frame 21 of the carriage 20 and a plurality of roller units 128A attached to the frame 123.
- the roller unit 128A comprises three rods 124a, 124b and 124c attached to the frame 123 and three roller assemblies 125a, 125b and 125c attached to the rods 124a, 124b and 124c, respectively.
- the three roller assemblies 125a, 125b and 125c of each roller unit 128A are arranged at the same position in the X-axis direction.
- the plurality of roller units 128A are arranged at predetermined intervals in the X-axis direction.
- roller assembly 125b and 125c have the same configuration as the roller assembly 125a (however, the roller assembly 125c is different in size from the roller assembly 125a), the roller assembly is representative of these. 125a will be described and duplicate description of the roller assemblies 125b and 125c will be omitted.
- the roller assembly 125a includes a roller 126a that rolls on the rail 121 and a pair of bearings 127a that rotatably support the roller 126a.
- the bearing 127a is a rolling bearing, and a ball bearing is used in the illustrated embodiment.
- the outer peripheral surface 126ap of the roller 126a is formed in a cylindrical surface shape, but is a curved surface having a curvature in the rotation axis direction (that is, even in the vertical cross section including the rotation axis shown in FIG. 7).
- a spherical surface centered on the center point 126ag of the roller 126a may be used.
- the bearing 127a of the roller assembly 125a is, for example, a single row radial bearing.
- the bearing 127a includes an inner ring 127a1 fitted to the rod 124a, an outer ring 127a3 fitted to the inner peripheral surface of the roller 126a, and a ball 127a2 which is a plurality of rolling elements interposed between the inner ring 127a1 and the outer ring 127a3.
- the ball 127a2 rolls on a circular orbit determined by a pair of annular grooves formed on the outer peripheral surface of the inner ring 127a1 and the inner peripheral surface of the outer ring 127a3, respectively.
- the roller assembly 125a is arranged so that the outer peripheral surface 126ap comes into contact with the head upper surface (top surface) 121a of the rail 121 and rolls on the head upper surface 121a as the carriage 20 travels.
- the roller assembly 125b is arranged so that the outer peripheral surface 126bp comes into contact with one of the head lower surface 121b of the rail 121 and rolls on the head lower surface 121b.
- the roller assembly 125c is arranged so that the outer peripheral surface 126cp comes into contact with one of the head side surfaces 121c of the rail 121 and rolls on the head side surface 121c.
- the rail 121 changes the shape of the head upper surface 121a, the head lower surface 121b, and the head side surface 121c, which come into contact with the roller assemblies 125a, 125b, and 125c, respectively, to a flat surface, and improves surface accuracy such as flatness and parallelism. Additional machining (for example, grinding, polishing, etc.) is applied to enhance it.
- the guide mechanism 12A and the guide mechanism 12C attached to the left and right ends of the carriage 20 are symmetrically configured. That is, the guide mechanism 12C is the same as the guide mechanism 12A arranged in the opposite direction (that is, rotated 180 degrees around the vertical axis).
- the traveling portion 122B of the guide mechanism 12B includes a frame 123 attached to the lower surface of the main frame 21 of the carriage 20 and a plurality of roller units 128B attached to the frame 123.
- the roller unit 128B comprises two rods 124a and 124b and two roller assemblies 125a and 125b. Further, the rod 124b and the roller assembly 125b are arranged on the left side of the rail 121 in the traveling portion 122A of the guide mechanism 12A, whereas they are arranged on the right side of the rail 121 in the traveling portion 122B of the guide mechanism 12B. ..
- the traveling portion 122B of the guide mechanism 12B is arranged in the opposite direction to the left and right, omitting the roller assembly 125c and the rod 124c from the traveling portion 122A of the guide mechanism 12A described above.
- the traveling portion 122B of the guide mechanism 12B may include the roller assembly 125c and the rod 124c.
- the roller assemblies 125b and 125c of the guide mechanism 12A arranged on the left side of the rail 121 prevent the carriage 20 from moving to the right (Y-axis negative direction) with respect to the rail 121. Further, the carriage 20 is moved to the left (Y-axis positive direction) with respect to the rail 121 by the roller assembly 125b of the guide mechanism 12B and the roller assemblies 125b and 125c of the guide mechanism 12C arranged on the right side of the rail 121. Is blocked. Therefore, the carriage 20 is prevented from moving in the Y-axis direction with respect to the rail 121.
- roller assembly 125b of the guide mechanisms 12A, 12B and 12C prevents the carriage 20 from moving upward (Z-axis positive direction) with respect to the rail 121. In this way, by preventing the carriage 20 from moving in the Y-axis direction and the Z-axis positive direction with respect to the rail 121, the derailment of the carriage 20 from the rail 121 is prevented.
- the traveling unit 122B (FIG. 8) is arranged in the opposite direction to the traveling unit 122A (FIG. 7), but the traveling unit 122B may be arranged in the same left-right direction as the traveling unit 122A. Similarly, the traveling unit 122C and the traveling unit 122A may be arranged in the same direction on the left and right sides. However, any two of the traveling unit 122A, the traveling unit 122B, and the traveling unit 122C are arranged in opposite directions to each other (that is, the roller assemblies 125b and 125c are arranged on the left and right opposite sides with respect to the rail 121).
- At least two traveling portions 122A, 122B or 122C arranged in opposite directions to prevent the carriage 20 from moving left and right (in the Y-axis direction) include the roller assembly 125c and the rod 124. good.
- At least one traveling portion 122A, 122B or 122C may be provided with the roller assembly 125b and the rod 124b in order to prevent the carriage 20 from moving upward (Z-axis positive direction).
- the roller assembly 125b can be used instead of the roller assembly 125c.
- the rail 121 of the guide mechanism 12 may be one in which a plurality of short rail members are connected.
- the seam 121j of the rail 121 is not perpendicular to the length direction (X-axis direction) of the rail 121, but diagonally in a plan view (that is, the seam 121j is in the ZX plane).
- it may be formed so as to be tilted at a certain angle ⁇ .
- roller assemblies 125b and 125c are placed on the right side).
- the end faces of the two rail members to be connected may be brought into contact with each other, or a predetermined gap may be provided between the end faces and the two rail members may be brought into contact with each other.
- the end faces of the two rail members to be connected are merely abutted and not joined, but the rail member is formed at the joint 121j by welding or brazing or the like. It may be joined.
- a guideway type circulation type linear bearing (so-called linear guide) can also be used instead of the guide mechanisms 12A, 12B and 12C of the present embodiment.
- the circulation type linear bearing has an oval track (that is, a passage through which the rolling element rolls) in which adjacent ends of two parallel straight tracks are connected by a semicircular orbit.
- a linear bearing having such an oval orbit is run at a high speed (for example, at a speed of 10 km / h or more)
- a sudden centrifugal force is applied to the rolling element.
- an impact load is applied to the rolling element and the rolling surface of the curved track
- the rolling element and the rolling surface are rapidly worn or damaged. Therefore, when the carriage 20 is run at high speed, there is a problem that the life of the linear bearing is shortened or damaged.
- the bearings 127a to 127c used in the guide mechanisms 12A, 12B and 12C of the present embodiment always travel on a circular orbit having a constant curvature, the centrifugal force acting on the rolling element suddenly fluctuates (that is,). Impact load) does not occur. Therefore, for example, even if the rollers 126a to c are rotated at a high peripheral speed exceeding 60 km / h, the life of the bearings 127a to 127 is not significantly reduced or damaged. Therefore, by configuring the guide mechanisms 12A to C using rolling bearings having a circular orbit in which the curvature of the orbit of the rolling element is constant, the carriage 20 travels at high speed (for example, traveling at a speed of 10 km / h or more). Will be possible. By adopting the guide mechanisms 12A, 12B and 12C described above, the tire test device 1 of the present embodiment enables the carriage 20 to travel at a speed exceeding 85 km / h.
- the tire test device 1 includes a drive system DS that drives the carriage 20 and the test wheel W.
- FIG. 10 is a block diagram showing a schematic logical configuration of the drive system DS.
- FIG. 11 is a diagram showing a schematic mechanical configuration of a main part of the drive system DS.
- the arrow indicates a transmission path of mechanical power (hereinafter, simply referred to as “power”).
- the drive system DS includes an activation unit AS that generates power, and a transmission unit TS that transmits the power generated by the activation unit AS to the carriage 20 and the test wheel W to be driven.
- the drive system DS together with the test wheel W and the road surface portion 60, constitutes a power circulation system.
- the activation unit AS includes two pairs of left and right drive units 14 (first activation means) attached to the track portion 10 and a torque applying device 30 (second activation means) attached to the carriage 20.
- the drive unit 14 is mainly used for controlling the traveling speed of the carriage 20 and the rotation speed of the test wheel W
- the torque applying device 30 is mainly used for controlling the torque applied to the test wheel W.
- the transmission unit TS is a first transmission unit TS1 that transmits the power generated by the drive unit 14 to the carriage 20, and a second transmission unit that takes out a part of the power transmitted by the first transmission unit TS1 and transmits it to the torque applying device 30. It includes TS2 and a third transmission unit TS3 that transmits the power output from the torque applying device 30 to the test wheel W.
- the torque applying device 30 also constitutes a part of the transmission unit TS.
- the two pairs of drive units 14 are on the base 11 of the track unit 10. It is installed near the four corners.
- the drive portions 14LA and 14RA are arranged at the rear end portion of the track portion 10, and the drive portions 14LB and 14RB are arranged at the front end portion of the track portion 10.
- the drive units 14RA and 14RB on the right side have a function as a carriage driving means for driving and traveling the carriage 20, and a test wheel for rotationally driving the test wheel W at a rotation speed corresponding to the traveling speed of the carriage 20. It also has a function as a driving means (rotational speed imparting means).
- the drive units 14LA and 14LB on the left side have a function as a carriage driving means.
- the first transmission unit TS1 includes a pair of a belt mechanism 15 (15L, 15R) and a driven unit (first driven unit 22 and second driven unit 23).
- the belt mechanism 15L on the left side is driven by a pair of drive units 14LA and 14LB on the left side
- the belt mechanism 15R on the right side is driven by a pair of drive units 14RA and 14RB on the right side.
- the first driven portion 22 and the second driven portion 23 are attached to the main frame 21 of the carriage 20.
- the first driven portion 22 is connected to the belt mechanism 15R on the right side
- the second driven portion 23 is connected to the belt mechanism 15L on the left side.
- FIG. 12 is a diagram showing a schematic structure of a drive unit 14 and a drive pulley unit 150 of the belt mechanism 15.
- FIG. 13 is a plan view of the first driven portion 22.
- 14, 15 and 16 are, in order, a cross-sectional view taken along the line AA, a cross-sectional view taken along the line BB, and a cross-sectional view taken along the line CC of FIG.
- FIG. 17 is a cross-sectional view showing a schematic structure of the second driven portion 23.
- Each belt mechanism 15 (15L, 15R) has a pair of drive pulley portions 150, a belt 151 (151L, 151R), and three driven pulleys 155A, 155C and 156 held by the first driven portion 22 (FIG. 14). ) Or three driven pulleys 155A, 155B and 155C (FIG. 17) held by the second driven portion 23, and a pair of belt clamps 157 (FIG. 3) for fixing both ends of the belt 151 to the main frame 21 of the carriage 20. , FIG. 5).
- the drive pulley section 150 is installed on the base 11 of the track section 10 and connected to the corresponding drive section 14.
- the belt 151R is wound around the drive pulleys (152A, 152B) of the pair of drive pulley portions 150 and the three driven pulleys 155A, 156 and 155C.
- the belt 151L is wound around the drive pulleys (152A, 152B) of the pair of drive pulley portions 150 and the three driven pulleys 155A, 155B and 155C.
- the drive unit 14 includes a motor 141 (first motor) and a belt mechanism 142.
- the motor 141 has, for example, an inertial moment of 0.01 kg ⁇ m 2 or less (more preferably 0.008 kg ⁇ m 2 or less) and a rated output of 3 kW to 60 kW (more practically, 7 kW to 37 kW). ) Is an ultra-low inertia and high output type AC servo motor. By using such an ultra-low inertia and high output motor 141, it becomes possible to accelerate the carriage 20 to the maximum speed (for example, 240 km) of the test tire T in a short mileage (for example, 20 to 50 m). ..
- the motor 141 may be a motor in which the rotating portion has a moment of inertia of a standard size. Further, the motor 141 may be another type of electric motor capable of speed control, such as a so-called inverter motor in which an inverter is used for drive control.
- the belt mechanism 142 includes a drive pulley 142a attached to the shaft 141b of the motor 141, a driven pulley 142c, and a belt 142b wound around the drive pulley 142a and the driven pulley 142c.
- the belt 142b is, for example, a toothed belt having the same configuration as the belt 151 described later.
- the type of the belt 142b may be different from that of the belt 151.
- the belt mechanism 142 has a reduction ratio larger than 1 because the pitch circle diameter of the driven pulley 142c is larger (that is, the number of teeth is larger) than that of the drive pulley 142a. Therefore, the rotation output from the motor 141 is decelerated by the belt mechanism 142.
- the reduction ratio of the belt mechanism 142 may be 1 or less.
- a speed reducer may be provided in the drive unit 14 in place of (or in addition to) the belt mechanism 142.
- the shaft 153 described later of the belt mechanism 15 may be directly connected to the shaft 141b of the motor 141 without providing the belt mechanism 142 or the speed reducer.
- a drive pulley unit 150 of the belt mechanism 15 is arranged adjacent to the drive unit 14.
- the drive pulley portion 150 includes a pair of bearing portions 154, a shaft 153 rotatably supported by a pair of bearing portions 154, and a drive pulley 152 attached to the shaft 153.
- the driven pulley 142c of the belt mechanism 142 is also attached to the shaft 153, and the output of the drive unit 14 is transmitted to the belt 151 wound around the drive pulley 152 via the shaft 153 and the drive pulley 152.
- Belt 151 is a toothed belt having a core wire of a steel wire.
- a belt having a core wire formed of so-called super fibers such as carbon fiber, aramid fiber, and ultra-high molecular weight polyethylene fiber may be used.
- the carriage 20 is driven at a high acceleration by using a motor having a relatively low output (or a high driving force / braking force is applied to the test wheel W).
- the tire test device 1 can be miniaturized. Further, when a motor having the same output is used, the performance of the tire test device 1 is improved (specifically, the acceleration performance is improved) by using a lightweight belt 151 having a core wire formed of so-called super fiber. ) Is possible.
- each belt 151 As shown in FIGS. 3 to 5, both ends of each belt 151 are fixed to the main frame 21 of the carriage 20 by the respective belts 151. As a result, each belt 151 forms a loop via the carriage 20. When each belt mechanism 15 operates, the carriage 20 is pulled by each belt 151 and travels in the X-axis direction.
- the belt 151 is fixed to the carriage 20 by the belt clamp 157 on the lower side of the loop, and the belt mechanism 15 and the first driven portion 22 or the second driven portion 23 are connected on the upper side of the loop.
- the belt clamp 157 having a relatively low height below the first driven portion 22 or the second driven portion 23, the height of the belt mechanism 15 can be lowered.
- the belt 151 may be fixed to the carriage 20 on the upper side of the loop.
- a pair of drive pulleys 152 (152A, 152B) of the belt mechanism 15 are arranged with a travelable area of the carriage 20 in between and held on the base 11 (ie,).
- a fixed pulley whose center of gravity is fixed with respect to the base 11.
- the driven pulleys 155 (155A, 155B, 155C) and 156 held by the first driven portion 22 or the second driven portion 23 are movable pulleys that can move in the X-axis direction together with the carriage 20.
- the pair of drive units 14LA and 14LB [14RA and 14RB] are driven in the same phase. Further, the drive units 14LA and 14LB on the left side and the drive units 14RA and 14RB on the right side are arranged in opposite directions and are driven in opposite phases to each other.
- the effective diameter that is, the pitch circle diameter
- the pitch circle diameter or the number of teeth of the driven pulley 156 (FIG. 14) held by the first driven portion 22 is larger (for example, twice) than that of the driven pulley 152 and the driven pulley 155.
- the carriage 20 includes a main frame 21, a first driven portion 22, a second driven portion 23, a belt mechanism 24, a belt mechanism 25, a transmission shaft portion 26, a brake device 27, a brake device 28, and torque. It includes a granting device 30, an alignment unit 40, and a spindle unit 50 (axle unit).
- the second transmission unit TS2 is configured by the first driven unit 22 and the belt mechanism 24.
- the belt mechanism 25, the transmission shaft portion 26, and the spindle portion 50 constitute the third transmission portion TS3.
- the spindle portion 50 includes a rotatably supported spindle 52.
- the spindle 52 is a shaft (that is, an axle) to which the test wheel W is coaxially attached to one end thereof (that is, so as to share the center line), and the test wheel together with the spindle 52 is driven by the power output from the torque applying device 30. W is rotationally driven.
- the alignment unit 40 is a mechanical unit capable of adjusting the wheel alignment (alignment adjustment) of the test wheel W by changing the direction of the spindle unit 50.
- the first driven portion 22 includes a main body portion 221, a bearing portion 222, a bearing portion 223, a shaft 224, a drive gear 225, a shaft 226, and a driven gear 227.
- the main body portion 221 includes two rods 221b extending in the Y-axis direction and a pair of bearings 221c in which an inner ring is fitted with each rod 221b.
- the driven pulleys 155A and 155C of the belt mechanism 15R are fitted to the outer ring of each bearing 221c, respectively. With this configuration, the driven pulleys 155A and 155C of the belt mechanism 15R are rotatably supported by the main body portion 221.
- the main body portion 221 includes a bearing 221a.
- the bearing portion 222 includes a pair of bearings 222a and 222b arranged one above the other.
- the bearing portion 223 includes a pair of bearings 223a and 223b arranged one above the other.
- the shaft 224 is rotatably supported by a bearing 221a at one end in the length direction, a bearing 223a at the other end, and a bearing 222a at the middle.
- a driven pulley 156 of the belt mechanism 15R and a drive gear 225 are attached to the shaft 224.
- the shaft 226 is shorter than the shaft 224 and is rotatably supported by a bearing 222b at one end in the length direction and by a bearing 223b at the other end.
- a driven gear 227 that meshes with the drive gear 225 and a drive pulley 241 of the belt mechanism 24 are attached to the shaft 226.
- the driven pulley 156 (belt mechanism 15R) and the drive pulley 241 (belt mechanism 24) are connected via the first driven portion 22.
- Part of the power transmitted by the belt mechanism 15R is transmitted to the shaft 224 via the driven pulley 156, then to the shaft 226 via the drive gear 225 and the driven gear 227, and further via the drive pulley 241. Is transmitted to the belt mechanism 24.
- the power transmitted to the belt mechanism 24 is used to drive the test wheel W.
- the first driven portion 22 on the right side and the driven pulley 156 (and the driven pulleys 155A, 155C) rotatably supported by the first driven portion 22 take out a part of the power from the belt mechanism 15R and belt the belt. It has a function of supplying to the mechanism 24.
- the remaining part of the power transmitted by the belt mechanism 15R is transmitted to the main frame 21 of the carriage 20 to which the belt 151 is fixed by the belt clamp 157, and is used for driving the carriage 20.
- the belt mechanism 15R on the right side constitutes a part of the means for driving the carriage 20 (carriage driving means) and also a part of the means for driving the test wheel W (test wheel driving means). Further, the belt mechanism 15R on the right side, together with the first driven unit 22 on the right side, uses the power generated by the drive units 14RA and 14RB as the power used to drive the carriage 20 and the power used to drive the test wheel W. It functions as a means of distribution (power distribution means).
- the belt mechanism 15R of the present embodiment has a reduction ratio larger than 1 because the pitch circle diameter of the driven pulley 156 on the output side is larger than that of the drive pulley 152 on the input side.
- the present invention is not limited to this configuration, and the pitch circle diameter of the driven pulley 156 may be equal to or greater than the pitch circle diameter of the drive pulley 152, and the reduction ratio of the belt mechanism 15R may be 1 or less.
- the first driven portion includes the drive gear 225 and the driven gear 227 to reverse the rotation direction of the power.
- the second driven portion 23 (main body portion 231) includes three rods 231b extending in the Y-axis direction and three bearings 231c whose inner ring is fitted with each rod 231b. ..
- the three rods 231b are arranged at equal intervals in the X-axis direction.
- the central rod 231b is arranged at a position higher than the remaining two rods 231b, but all the rods 231b may be arranged at the same height.
- each bearing 231c is fitted with three driven pulleys 155 of the belt mechanism 15L (driven pulleys 155A, 155B and 155C in order from the front). With this configuration, the driven pulleys 155A, 155B and 155C of the belt mechanism 15L are rotatably supported by the second driven portion 23.
- the belt 151 of the belt mechanism 15 is divided into an upper portion 151a and a lower portion 151b by being folded back by the drive pulleys 152A and 152B.
- the upper portion 151a and the lower portion 151b are respectively stretched in the traveling direction of the carriage 20 and driven in opposite directions to each other.
- the lower portion 151b of the belt 151 fixed to the carriage 20 is driven in the traveling direction of the carriage together with the carriage 20, and the upper portion 151a is driven in the opposite direction to the carriage 20 and the lower portion 151b. Will be done.
- the driven pulleys 155 and 156 attached to the carriage 20 are wound around the upper portion 151a of the belt 151 traveling in the opposite direction to the carriage 20 and driven by the upper portion 151a.
- a part of the power transmitted by the belt mechanism 15R on the right side is transmitted to the torque applying device 30 by the second transmission unit TS2, and further, the test wheel is further transmitted by the third transmission unit TS3. It is transmitted to W and used to drive the test wheel W.
- the second transmission unit TS2 includes the first driven unit 22 and the belt mechanism 24, and the third transmission unit TS3 includes the belt mechanism 25, the transmission shaft unit 26, and the spindle unit 50.
- the rest of the power transmitted by the right belt mechanism 15R is transmitted to the mainframe 21 of the carriage 20 to which the tip of the belt 151 is fixed by the belt clamp 157 and used to drive the carriage 20. Will be done.
- the belt mechanism 15R and the first driven portion 22 configured as described above enable the belt 151 to drive both the carriage 20 and the test wheel W.
- the second driven portion 23 on the left side has a configuration for taking out a part of the power transmitted by the belt mechanism 15L and transmitting it to the second transmission portion TS2 provided on the carriage 20 (specifically, the bearing portion). It differs from the first driven portion 22 on the right side in that it does not have 222, 223, a shaft 224, 226, a drive gear 225, and a driven gear 227).
- the second driven portion 23 on the left side is not an essential component, by providing the second driven portion 23 on the left side, the forces received by the carriage 20 from the left and right belt mechanisms 15L and 15R are balanced, and the carriage 20 travels. Stabilizes.
- the carriage 20 and the test wheel W are driven by using the power transmitted by the common power transmission device (that is, the belt mechanism 15R).
- the test wheel W can always be rotationally driven at a peripheral speed (rotational speed) corresponding to the traveling speed of the carriage 20.
- the test wheel in order to reduce the operating amount (that is, power consumption) of the torque applying device 30, when the torque applying device 30 is not operating, the test wheel has substantially the same peripheral speed as the traveling speed of the carriage 20. W is configured to be rotationally driven.
- the belt mechanism 24 includes a drive pulley 241 attached to the shaft 226 (FIG. 16) of the first driven portion 22 described above, and a driven pulley 242 attached to the shaft portion 314 (FIG. 18) of the torque applying device 30 described later.
- a belt 243 wound around a drive pulley 241 and a driven pulley 242 is provided.
- the belt 243 is, for example, a toothed belt having the same configuration as the belt 151 described above.
- the type of belt 243 may be different from that of belt 151.
- FIG. 18 is a diagram showing the structure of the torque applying device 30.
- the torque applying device 30 generates a torque applied to the test wheel W, and outputs this torque in addition to the rotational motion transmitted by the belt mechanism 24.
- the torque applying device 30 applies torque to the test wheel W by changing the phase of the rotational motion transmitted by the belt mechanism 24 (that is, a driving force or a driving force between the road surface 63a and the test wheel W). It can give braking force).
- the torque applying device 30 functions as a second starting means for generating power for driving the test wheel W, and also functions as a power and torque applying device generated by the motor 141 (first motor) of the driving unit 14 (first starting means). It also functions as a power coupling means for coupling the power generated by the motor 32 (second motor) described later in 30.
- the torque applying device 30 By incorporating the torque applying device 30 into the drive system DS, the power source for controlling the rotation speed of the test wheel W (drive units 14RA, 14RB) and the power source for controlling the torque (motor 32 described later) are used. It becomes possible to divide the roles. As a result, it becomes possible to use a power source having a smaller capacity and to control the rotation speed and torque applied to the test wheel W with higher accuracy. Further, by incorporating the torque applying device 30 into the carriage 20, the load applied to the belt mechanism 15R is reduced, so that the belt mechanism 15R can be downsized (for example, the number of toothed belts used can be reduced) and the load capacity can be increased. Allows the use of lower components.
- the torque applying device 30 includes a rotary frame 31, a motor 32 (second motor) mounted in the rotary frame 31, a speed reducer 33 and a shaft 34, and three bearing portions 351 that rotatably support the rotary frame 31. It includes 352 and 353, a slip ring portion 37, and a rotary encoder 38 that detects the number of rotations of the rotating frame 31.
- the motor 32 has a moment of inertia of the rotating portion of 0.01 kgm 2 or less (more preferably 0.008 kg m 2 or less) and a rated output of 3 kW to 60 kW (more practically).
- a moment of inertia of the rotating portion of 0.01 kgm 2 or less (more preferably 0.008 kg m 2 or less) and a rated output of 3 kW to 60 kW (more practically).
- the rotating frame 31 has a substantially cylindrical first cylinder portion 311 (motor accommodating portion), a second cylinder portion 312 (connecting cylinder), a third cylinder portion 313, and a diameter smaller than that of the first cylinder portion 311. It has substantially cylindrical shaft portions 314 and 315.
- a shaft portion 314 is coaxially coupled to one end portion (right end portion in FIG. 18) of the first cylinder portion 311 via a second cylinder portion 312 and a third cylinder portion 313.
- a shaft portion 315 is coaxially coupled to the other end portion (left end portion in FIG. 18) of the first cylinder portion 311.
- the shaft portion 314 is rotatably supported by bearing portions 351 and 353, and the shaft portion 315 is rotatably supported by bearing portions 352.
- the motor 32 is housed in the hollow portion of the first cylinder portion 311.
- the shaft 321 is arranged coaxially with the rotating frame 31, and the motor case 320 (that is, the stator) is fixed to the first cylinder portion 311 by a plurality of stud bolts 323.
- the speed reducer 33 is arranged in the hollow portion of the second cylinder portion 312 and the third cylinder portion 313.
- the shaft 321 of the motor 32 is connected to the input shaft 332 of the speed reducer 33, and the shaft 34 is connected to the output shaft 333.
- a flange 312a projecting to the outer periphery is formed at one end of the second cylinder portion 312 (the right end portion in FIG. 18). At the other end of the second tubular portion 312 (the left end portion in FIG. 18), a flange 312b projecting to the outer periphery and an inner flange 312c projecting to the inner circumference are formed.
- the flange 320a of the motor 32 is fixed to the inner flange 312c of the second cylinder portion 312.
- the gear case 331 of the speed reducer 33 is fixed to one end of the second cylinder portion 312 (that is, the base of the flange 312a). That is, the motor case 320 of the motor 32 and the gear case 331 of the speed reducer 33 are connected with high rigidity via a second cylindrical portion 312 which is a single short cylindrical member.
- a flange 315a having the same diameter as the first cylinder portion 311 is formed at the base of the shaft portion 315, and one end of the first cylinder portion 311 is fixed to the outer peripheral portion of the flange 315a. Further, the flange 320b of the motor 32 is fixed to the flange 315a of the first cylinder portion 311. Since the motor 32 is fixed to the rotating frame 31 at both ends and the center of the motor case 320 in the length direction, it is supported with high rigidity.
- a flange 314a having the same diameter as the third cylinder portion 313 is formed at the base of the shaft portion 314, and one end of the third cylinder portion 313 is fixed to the outer peripheral portion of the flange 314a. Further, the other end of the third cylinder portion 313 is fixed to the outer peripheral portion of the flange 312a of the second cylinder portion 312.
- the shaft portion 314 is rotatably supported by the bearing portion 351 near the flange 314a on the root side and by the bearing portion 353 at the tip portion.
- a driven pulley 242 of the belt mechanism 24 is arranged between the bearing portion 351 and the bearing portion 353, and is coaxially attached to the outer periphery of the shaft portion 314.
- the rotating portion of the torque applying device 30 is rotationally driven by the power transmitted by the belt mechanism 24. That is, the shaft portion 314 (rotating frame 31) is the input shaft of the torque applying device 30.
- a pair of bearings 314b are provided on the inner circumference of both ends of the shaft portion 314 (that is, the portion supported by the bearing portion 351 or the bearing portion 353).
- the shaft 34 is passed through a hollow portion of the shaft portion 314 and is rotatably supported by a pair of bearings 314b.
- the tip of the shaft 34 protrudes outward from the tip of the shaft portion 314.
- a drive pulley 251 of the belt mechanism 25 is coaxially attached to the tip of the shaft 34 protruding from the shaft portion 314, and the belt mechanism 25 is driven by the power output from the shaft 34. That is, the shaft 34 is the output shaft of the torque applying device 30.
- the torque output from the motor 32 is amplified by the speed reducer 33 and transmitted to the shaft 34.
- the rotation output from the shaft 34 to the belt mechanism 25 is obtained by superimposing the torque generated by the motor 32 and the speed reducer 33 on the rotation of the rotating frame 31 driven by the belt mechanism 24.
- the torque applying device 30 adds the torque generated by the torque applying device 30 to the rotational motion transmitted to the shaft portion 315 of the rotating frame 31 which is the input shaft, and outputs the torque from the shaft 34 which is the output shaft.
- the slip ring portion 37 includes a plurality of pairs of slip rings 371, a brush 372, a support tube 373, a bearing portion 374, a support column 375, and a support arm 376.
- the support tube 373 is coaxially connected to the shaft portion 315 of the rotating frame 31.
- the tip of the support tube 373 is rotatably supported by the bearing portion 374.
- the support arm 376 is arranged in parallel with the support tube 373, one end thereof is fixed to the support column 375 arranged on the rotating frame 31 side, and the other end is fixed to the frame of the bearing portion 374.
- a plurality of slip rings 371 are arranged at regular intervals in the axial direction and attached to the outer periphery of the support tube 373.
- the plurality of brushes 372 are arranged so as to face each other and come into contact with the outer peripheral surface of the corresponding slip ring 371, and are attached to the support arm 376.
- a lead wire (not shown) is connected to each slip ring 371.
- the lead wire is passed through the hollow portion of the support tube 373 and is drawn out to the hollow portion of the shaft portion 315 of the rotating frame 31.
- the cable 325 of the motor 32 is passed through the hollow portion of the shaft portion 315, and a plurality of wires included in the cable 325 are connected to the lead wire of the corresponding slip ring 371.
- the brush 372 is connected to the driver 32a (FIG. 38). That is, the motor 32 and the driver 32a are connected via the slip ring portion 37.
- the rotary encoder 38 is attached to the bearing portion 374 of the slip ring portion 37. Further, a support tube 373 that rotates integrally with the rotating frame 31 is connected to the input shaft of the rotary encoder 38.
- the belt mechanism 25 has a drive pulley 251 attached to the output shaft (shaft 34) of the torque applying device 30 and a driven drive attached to the input shaft (transmission shaft 261) of the transmission shaft portion 26.
- the pulley 252, the drive pulley 251 and the belt 253 wound around the driven pulley 252 are provided, and the power output from the torque applying device 30 is transmitted to the transmission shaft portion 26.
- the belt 253 is, for example, a toothed belt having the same configuration as the belt 151 described above.
- the type of belt 253 may be different from that of belt 151.
- the transmission shaft portion 26 includes a transmission shaft 261, a pair of bearing portions 262 that rotatably support the transmission shaft 261, a disc brake 263, a sliding constant velocity joint 265, a transmission shaft 266, and a transmission shaft 266. It is equipped with a bearing 267 that rotatably supports it.
- the disc brake 263 includes a disc rotor 263a attached to the transmission shaft 261 and a caliper 263b that applies friction to the disc rotor 263a to perform braking.
- the transmission shaft 261 has a driven pulley 252 of the belt mechanism 25 attached to one end thereof, and one end of a sliding constant velocity joint 265 is connected to the other end via a disc rotor 263a.
- the other end of the sliding constant velocity joint 265 is connected to the spindle 52 via a transmission shaft 266.
- the sliding constant velocity joint 265 is configured to be able to smoothly transmit rotation without rotation fluctuation regardless of the operating angle (that is, the angle formed by the input shaft and the output shaft). Further, the length (transmission distance) of the slide type constant velocity joint 265 in the axial direction is also variable.
- the angle and position of the spindle 52 to which the test wheel W is attached are variably supported by the alignment portion 40.
- the slide type constant velocity joint 265 By connecting the transmission shaft 261 and the spindle 52 via the slide type constant velocity joint 265, even if the angle or position of the spindle 52 changes, the slide type constant velocity joint 265 can flexibly follow this change. can. Therefore, a large strain is not applied to the spindle 52 and the transmission shaft 261, and the power is smoothly transmitted.
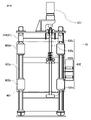
- FIG. 19 is a diagram showing a schematic structure of the alignment unit 40.
- FIGS. 20, 21, 22, and 23 are, in order, AA arrow view, BB arrow view, CC arrow view, and DD arrow view of FIG.
- the alignment unit 40 includes a load adjusting unit 42, a camber adjusting unit 44, and a slip angle adjusting unit 46.
- the load adjusting unit 42 changes the height of the spindle 52 and the test wheel W attached to the spindle 52 (more specifically, the distance from the road surface 63a to the center C of the test wheel W), thereby changing the test wheel W. It is a mechanism for adjusting the load applied to the road surface (vertical load received from the road surface 63a).
- the load adjusting unit 42 includes an elevating frame 421 (first movable frame) that can move up and down (Z-axis direction) with respect to the base 11, and a plurality of load adjusting units 42 that guide the up and down movement of the elevating frame 421 (in the illustrated embodiment). It includes two pairs of linear guides 422 and one or more (one pair in the illustrated embodiment) Z-axis drive unit 43 that drives the elevating frame 421 up and down.
- a hut-shaped (or eastern-style) alignment mechanism support portion 214 for accommodating the alignment portion 40 is provided on the left side of the main frame 21 of the carriage 20, a hut-shaped (or eastern-style) alignment mechanism support portion 214 for accommodating the alignment portion 40 is provided.
- the elevating frame 421 is housed in the alignment mechanism support portion 214.
- the linear guide 422 includes a rail 422a extending vertically and one or more (two in the illustrated embodiment) traveling portions 422b capable of traveling on the rail 422a. One of the rail 422a and the traveling portion 422b of each linear guide 422 is attached to the alignment mechanism support portion 214, and the other is attached to the elevating frame 421.
- the Z-axis drive unit 43 (first drive unit) includes a motor 431 and a ball screw 432 (motion converter) that converts the rotational motion of the motor 431 into a linear motion in the Z-axis direction.
- the ball screw 432 includes a screw shaft 432a connected to the shaft of the motor 431, a nut 432b that meshes with the screw shaft 432a, and bearings 432c and 432d that rotatably support the screw shaft 432a.
- the motor 431 and the two bearings 432c and 432d are attached to the alignment mechanism support portion 214, and the nut 432b is attached to the elevating frame 421.
- the elevating frame 421 moves up and down together with the nut 432b.
- the test wheel W moves up and down via the camber adjusting section 44, the slip angle adjusting section 46, and the spindle section 50 supported by the elevating frame 421, and the drive amount of the ball screw 432 (that is, the height of the test wheel W). ) Is applied to the test wheel W.
- the screw shaft 432a is directly connected to the motor 431, but the motor 431 and the screw shaft 432a may be connected via a speed reducer or a gear device for reducing the rotation of, for example, a worm gear.
- the feed screw mechanism is used as the motion converter in this embodiment, another type of motion converter capable of converting rotary motion into linear motion may be used.
- the motor 431 of this embodiment is a servo motor, another type of motor capable of controlling the operating amount may be used as the motor 431.
- the camber adjusting unit 44 is a mechanism for adjusting the camber angle, which is the inclination of the test wheel W with respect to the road surface, by turning the spindle 52 around the E ⁇ axis (the axis extending back and forth through the center C of the test wheel W). ..
- the camber adjusting unit 44 includes a ⁇ -rotating frame 441 (second movable frame) that can rotate around the E ⁇ -axis, a pair of bearings 442 that rotatably support the ⁇ -rotating frame 441, and rotation of the ⁇ -rotating frame 441. It is provided with a pair of curved guides 443 for guiding the two, and a pair of left and right ⁇ drive units 45 (second drive units) for rotationally driving the ⁇ rotation frame 441.
- the ⁇ -rotating frame 441 and the elevating frame 421 of the present embodiment have a portal shape ( ⁇ shape) when viewed in the Y-axis direction.
- the ⁇ -rotating frame 441 is housed in the cavity of the ⁇ -shaped elevating frame 421.
- Cylindrical pivots 441a are provided on the front surface and the back surface of the ⁇ -rotating frame 441 so as to project outward (that is, in a direction away from the test wheel W) coaxially with the E ⁇ axis, respectively.
- Each pivot 441a is rotatably supported by a pair of bearings 442 attached to the elevating frame 421.
- the ⁇ -rotating frame 441 is rotatably supported around the E ⁇ -axis with the pivot 441a as a support axis.
- the bearing 442 may be attached to the ⁇ -rotating frame 441, and the pivot 441a may be attached to the elevating frame 421.
- the shapes of the ⁇ -rotating frame 441 and the elevating frame 421 are not limited to the shapes of the present embodiment, and may be any shape having a hollow portion capable of accommodating the spindle portion 50 and the like.
- the curve guide 443 includes an arcuate curved rail 443a arranged concentrically with the E ⁇ axis and one or more (two in the illustrated embodiment) traveling portions 443b capable of traveling on the curved rail 443a. There is. One of the curved rail 443a and the traveling portion 443b is attached to the elevating frame 421, and the other is attached to the ⁇ rotating frame 441.
- the ⁇ drive unit 45 includes a pair of spur gears 453 attached to the front and back of the ⁇ rotating frame 441, a pair of pinions 452 that mesh with each spur gear 453, and a pair of motors 451 that drive each pinion 452.
- the spur gear 453 may be attached to the elevating frame 421, and the motor 451 may be attached to the ⁇ rotating frame 441.
- the spur gear 453 is a segment gear formed in an arc shape centered on the E ⁇ axis (that is, coaxial with the E ⁇ axis). Although the spur gear 453 is an internal gear in the illustrated embodiment, it may be an external gear.
- the motor 451 is attached to the elevating frame 421, and the pinion 452 is coupled to the shaft 451s of the motor 451.
- the motor 451 of the present embodiment is a servo motor, another type of motor capable of controlling the operating amount may be used as the motor 451.
- the slip angle adjusting unit 46 changes the direction around the E ⁇ axis (the axis extending vertically through the center C of the test wheel W) of the spindle 52, so that the test wheel W with respect to the traveling direction (X axis direction) of the carriage 20 (More specifically, it is a mechanism for adjusting the slip angle, which is the inclination of the wheel center surface perpendicular to the axle).
- the slip angle adjusting unit 46 includes a ⁇ -rotating frame 461 (third movable frame) that can rotate around the E ⁇ axis, a bearing 462 that rotatably supports the ⁇ -rotating frame 461, and a bearing 462.
- a ⁇ drive unit 47 that rotationally drives the ⁇ rotation frame 461 is provided.
- the ⁇ -rotating frame 461 is housed in a cavity of a portal-shaped ( ⁇ -shaped) ⁇ -rotating frame 441 when viewed in the Y-axis direction.
- a pivot 461a projecting coaxially with the E ⁇ axis is provided on the upper surface of the ⁇ rotation frame 461.
- the pivot 461a is rotatably supported by a bearing 462 attached to the top plate of the ⁇ -rotating frame 441.
- the ⁇ rotation frame 461 is rotatably supported around the E ⁇ axis with the pivot 461a as a support axis.
- the ⁇ drive unit 47 rotationally drives a spur gear 473 attached to the ⁇ rotation frame 461, one or more (a pair in the illustrated embodiment) pinions 452 that mesh with the spur gear 473, and each pinion 452. It comprises one or more (a pair in the illustrated embodiment) motors 471.
- the spur gear 473 is coaxially coupled to the pivot 461a.
- the motor 471 is attached to the ⁇ -rotating frame 441, and the pinion 452 is attached to the shaft of the motor 471.
- FIG. 24 is a diagram showing a schematic structure of the spindle portion 50 (wheel support portion).
- the spindle portion 50 is attached to the lower end portion of the ⁇ rotation frame 461.
- the spindle portion 50 includes a frame 51 fixed to the ⁇ rotating frame 461, a plurality of bearings 53 attached to the frame 51 (a pair in the illustrated embodiment), and a spindle 52 rotatably supported by the bearing 53.
- a 6-component force sensor 54 for detecting a force applied to the test wheel W and a wheel hub 55 coaxially attached to the tip of the spindle 52 via the 6-component force sensor 54 are provided.
- the 6-component force sensor 54 includes a plurality of piezoelectric elements (not shown).
- the wheel rim Wr (FIG. 1) of the test wheel W is attached to the wheel hub 55.
- the transmission shaft 266 of the transmission shaft portion 26 is connected to the end of the spindle 52.
- the transmission shaft 266 is rotatably supported by a bearing 267 attached to the frame 51 of the spindle portion 50.
- the alignment unit 40 tests three axes, E ⁇ axis, E ⁇ axis, and E ⁇ axis, so that the position of the test wheel W does not move even if the camber angle ( ⁇ angle) or slip angle ( ⁇ angle) is changed. It is configured to intersect at one point of the center C of the ring W.
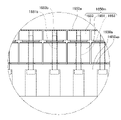
- FIG. 25 is a cross-sectional view of the road surface portion 60.
- the road surface portion 60 includes a frame 61 and a main body portion 60a supported by the frame 61.
- the main body 60a includes a base 62 and a pavement 63 held on the base 62.
- On the upper surface of the base 62 a recess 621 extending in the extension direction of the road surface portion 60 (that is, the X-axis direction which is the traveling direction of the carriage 20) is formed.
- the pavement portion 63 is formed, for example, by filling the recess 621 with a simulated pavement material described later and curing it.
- a road surface 63a on which the test wheel W touches the ground is formed on the upper surface of the pavement portion 63.
- the main body 60a is composed of a main body unit 600a which is a road surface unit (an replaceable structure including at least a part of the road surface 63a), and is detachably mounted on the frame 61. ..
- the road surface unit is not limited to the form in which the main body portion 60a is unitized as in the present embodiment (referred to as “main body portion unit”), but is referred to as a form in which only the pavement portion 63 is unitized (referred to as “paving portion unit”). ) And the entire road surface 60 including the frame 61 can be unitized (referred to as “road surface unit”).
- the main body 60a of the present embodiment is composed of a plurality of main body units 600a obtained by dividing the main body 60a in the extension direction of the road surface 60, and can be exchanged in units of the main body units 600a.
- the entire main body 60a may be formed as a single replaceable road surface unit.
- the road surface portion 60 By configuring the road surface portion 60 from a road surface unit such as a main body unit 600a as in the present embodiment, it is possible to replace at least a part of the road surface 63a by exchanging the road surface unit.
- the type of the pavement portion 63 may be changed for each main body unit 600a so that the friction coefficient of the road surface 63a changes in the extension direction of the road surface portion 60, for example.
- the lower surface of the base 62 is provided with a concave portion 622 that fits with the convex portion 612 provided on the upper surface of the frame 61.
- the main body unit 600a is placed on the frame 61 so that the convex portion 612 and the concave portion 622 are fitted, and the main body unit 600a is fixed by fixing means (not shown) such as a bolt or a cam lever. Is detachably mounted on the frame 61.
- the frame 61 is also formed of a plurality of frame units 610 in which the frame 61 is divided in the extension direction of the road surface portion 60, and can be exchanged in units of the frame units 610.
- the frame unit 610 and the main body unit 600a are formed to have the same length, and can be replaced in units of the road surface unit 600 in which the main body unit 600a is attached to the frame unit 610.
- the pavement portion 63 may be configured to be detachable from the base 62.
- the pavement portion 63 may be configured from a plurality of pavement portion units 630 obtained by dividing the pavement portion 63 in the extension direction of the road surface portion 60, and the pavement portion 63 may be exchangeable in units of the pavement portion unit 630.
- the frame unit 610, the base unit 620 and the pavement unit 630 may be assembled to manufacture the road surface unit 600, and the road surface unit 600 may be exchangeable.
- a plurality of road surface unit 600s are connected to form the road surface 60.
- the road surface unit 60 can be extended or shortened by adding or deleting the road surface unit 600. Further, by making the plurality of road surface units have the same structure, it becomes possible to efficiently manufacture the road surface portion 60.
- the track portion 10 is also divided into a plurality of track portion units 100 in the extension direction.
- the track unit 10 can be extended or shortened by adding or deleting the track unit 100.
- the track unit 100 is formed to have the same length as the road surface unit 600. Therefore, the lengths of the track portion 10 and the road surface portion 60 can be made uniform.
- the road surface unit 60 and the track unit 10 may be extended, shortened, or partially replaced by a unit of a composite unit in which the track unit 100 and the road surface unit 600 are integrated.
- a simulated pavement simulating an asphalt paved road (that is, the influence of the amount of tire wear on the tire is similar to that of an actual asphalt paved road) is formed. ing.
- the simulated pavement for example, ceramics having excellent wear resistance such as silicon carbide and alumina are crushed (further polished and etched as necessary), and the aggregate is made of, for example, urethane resin or epoxy resin. It is formed by molding and curing a simulated pavement material to which a binder has been added. By using such a simulated pavement material, a simulated road surface having excellent durability and stable road surface condition (that is, stable wear amount of the test tire T and the like) can be obtained.
- the amount of tire wear can be adjusted, for example, by adjusting the particle size of the aggregate, the amount of the binder added, and the like.
- the simulated pavement of the present embodiment has a single-layer structure, but for example, a simulated pavement in which a plurality of layers formed of different materials are laminated in the thickness direction may be used. Further, for example, a simulated pavement simulating paving stone pavement, brick pavement, concrete pavement, etc. may be used by adjusting the type and particle size of the aggregate, the type and blending amount of the binder, and the like.
- the road surface 63a may be formed so that the damage given to the tire is larger (or smaller) than the actual road surface.
- the pavement portion 63 may be formed from an actual pavement material (for example, an asphalt mixture used for the surface layer of asphalt pavement). Further, not only the outermost layer forming the road surface but also the pavement portion 63 that reproduces or imitates the actual pavement up to the lower layer structure may be used.
- an actual pavement material for example, an asphalt mixture used for the surface layer of asphalt pavement.
- the tire test device 1 of the present embodiment is a foreign substance (for example, water, snow, muddy water, soil, sand, gravel, oil, or a model thereof) that affects the performance of the tire because the road surface 63a does not move during the test. Etc.) can be sprinkled on the road surface 63a and the test can be performed. For example, a wet braking test can be performed by performing the test in a state where water is sprinkled on the road surface 63a.
- a foreign substance for example, water, snow, muddy water, soil, sand, gravel, oil, or a model thereof
- FIG. 26 is a cross-sectional view of the road surface portion 60A, which is a modified example of the road surface portion 60.
- the road surface portion 60A includes a frame portion 67 attached to the base 62.
- the frame portion 67 is watertightly joined to the base 62 by caulking or the like, and forms a tank 68 together with the base 62 and the pavement portion 63.
- Foreign matter for example, water, gravel, soil, fallen leaves, etc.
- the frame portion 67 of this modification is attached to the upper surface of the base 62, the frame portion 67 may be attached to the side surface of the base 62. Further, the frame portion 67 may be attached to the upper surface of the pavement portion 63.
- the road surface portion 60A is provided with a temperature adjusting means 64 capable of adjusting the temperature of the road surface 63a.
- the temperature adjusting means 64 of this modification has a flow path 64a embedded in the base 62, a temperature sensor 64b for detecting the temperature of the road surface 63a, and a temperature adjusting device 64c (FIG. 38).
- the temperature sensor 64b is a non-contact temperature sensor such as a contact type temperature sensor using a thermocouple or a thermistor or an infrared sensor.
- the temperature adjusting device 64c is connected to the control unit 72 and adjusts the temperature of the road surface 63a to the set temperature based on the command from the control unit 72.
- the temperature adjusting device 64c adjusts the temperature of the heat medium (for example, water containing oil or antifreeze) based on the detection result of the temperature sensor 64b, and sends the heat medium to the flow path 64a.
- the road surface 63a can be adjusted to a predetermined temperature by flowing a heat medium whose temperature has been adjusted by the temperature adjusting device through the flow path 64a. Further, in order to stabilize the temperature of the road surface 63a and increase the heat utilization efficiency, the surface of the base 62 is covered with the heat insulating material 69.
- the temperature adjusting means 64 can adjust the temperature of the road surface 63a in a wide range from a low temperature (for example, ⁇ 40 ° C.) to a high temperature (for example, 80 ° C.).
- a frozen road surface can be formed by storing water in the tank 68 and setting the set temperature of the road surface 63a below the freezing point. That is, the on-ice braking test can be performed by using the road surface portion 60A of this modified example. Further, a braking test on snow can be performed with snow in the tank 68.
- the flow path 64a is formed so as to meander in the basement 62 in parallel with the road surface 63a at equal intervals. Further, the base 62 is divided into a plurality of sections (base unit 620) in the extension direction, and individual flow paths 64a are provided in each section. With this configuration, it becomes possible to adjust the entire road surface 63a to a more uniform temperature.
- the load detection unit 165 is a component that can detect the load distribution applied to the tire tread.
- FIGS. 29-31 are a front view, a right side view, and a plan view of the load detection unit 165 in order.
- a recess 60p elongated in the Y-axis direction is formed on the upper surface of the main body portion 60a of the road surface portion 60.
- the load detection unit 165 is housed in the recess 60p and is fixed to the bottom surface of the recess 60p.
- the load detection unit 165 includes a fixed frame 1658, a movable frame 1659, a pair of linear guides 1654, a sensor array unit 1650, a moving unit 1655, and a sensor position detection unit 1656.
- the movable frame 1659 is movably supported in the Y-axis direction (that is, the width direction of the road surface portion 60) by a pair of linear guides 1654.
- the sensor array unit 1650 is attached to the upper surface of the movable frame 1659. Details of the sensor array unit 1650 will be described later.
- FIG. 32 is a plan view showing a state in which the movable portion of the load detection unit 165 (that is, the movable frame 1659 and the sensor array unit 1650) is removed.
- the fixed frame 1658 comprises a substantially rectangular base plate 1658a and a pair of rail supports 1658b fixed to the top surface of the base plate 1658a.
- the pair of rail support portions 1658b are arranged with an interval in the X-axis direction with the length direction facing the Y-axis direction.
- the linear guide 1654 includes a rail 1654a extending in the Y-axis direction and a plurality of (three in this embodiment) carriages 1654b (hereinafter referred to as "runner 1654b") capable of traveling on the rail 1654a.
- the rail 1654a is attached to the upper surface of the rail support portion 1658b. Further, the runner 1654b is attached to the lower surface of the movable frame 1659.
- the linear guide 1654 guides the movement of the movable frame 1659 in the Y-axis direction.
- the moving unit 1655 is arranged between a pair of rail support portions 1658b and a linear guide 1654.
- the moving unit 1655 includes a motor 1655m and a ball screw 1655b.
- the ball screw 1655b includes a screw shaft 1655ba, a nut 1655bb, a bearing portion 1655bc, and a bearing portion 1655bd.
- the motor 1655m of the present embodiment is a servo motor, another type of motor capable of controlling the operating amount may be used as the motor 1655m.
- the screw shaft 1655ba is rotatably supported at both ends by a pair of bearing portions 1655bc and 1655bd. Further, one end of the screw shaft 1655ba is connected to the shaft of the motor 1655m.
- the nut 1655bb that meshes with the screw shaft 1655ba is attached to the lower surface of the movable frame 1659.
- the sensor position detection unit 1656 includes a movable arm 1656a, a plurality of (three in this embodiment) proximity sensors 1656c, and a sensor mounting unit 1656b.
- the end of the movable arm 1656a is fixed to the movable frame 1659, and the movable arm 1656a can move in the Y-axis direction together with the movable frame 1659.
- the sensor mounting portion 1656b is mounted on the fixed frame 1658.
- the plurality of proximity sensors 1656c are arranged at intervals (for example, evenly spaced) in the Y-axis direction with the detection surface 1656cf facing in the positive direction of the X-axis, and are attached to the sensor mounting portion 1656b.
- a proximity portion 1656ap close to the proximity sensor 1656c is formed.
- the proximity portion 1656ap is formed by bending the tip portion of the movable arm 1656a into a crank shape.
- the proximity portion 1656ap is arranged at the same height as the detection surface 1656cf of the plurality of proximity sensors 1656c. Further, the detection surfaces 1656cf of the plurality of proximity sensors 1656c are arranged at intervals within the movable range in the Y-axis direction of the proximity portion 1656ap.
- FIG. 33 is an enlarged view of the region E surrounded by the alternate long and short dash line in FIG. 29.
- the sensor array unit 1650 includes a frame 1650a and a plurality of (150 in this embodiment) load detection modules 1650m.
- a recess 1650ap long in the Y-axis direction is formed in the center of the upper surface of the frame 1650a.
- a plurality of load detection modules 1650 m are housed in the recess 1650 ap and fixed to the bottom surface of the recess 1650 ap.
- a plurality of load detection modules 1650 m are arranged at equal intervals (for example, with almost no gap) in a grid point shape in two directions of the X-axis direction and the Y-axis direction.
- 150 load detection modules 1650 m are arranged in 5 rows in the X-axis direction and 30 rows in the Y-axis direction.
- the load detection module 1650m is provided with a 3-component force sensor 1651, a pavement portion 1652, and a bolt 1653.
- the 3-component force sensor 1651 is a cylindrical piezoelectric element whose central axis faces the Z-axis direction.
- the pavement portion 1652 is, for example, a rectangular parallelepiped member having the same lengths in the X-axis direction and the Y-axis direction, which is formed of the same simulated pavement material or pavement material as the pavement portion 63.
- the shapes of the 3-component force sensor 1651 and the pavement portion 1652 are not limited to these shapes.
- the shape of the 3-component force sensor 1651 may be a rectangular parallelepiped shape
- the shape of the pavement portion 1652 may be a columnar shape.
- a hole 1651b penetrating in the Z-axis direction is formed in the center of the columnar 3-component force sensor 1651. Further, a bolt hole 1652b extending in the Z-axis direction is formed in the center of the pavement portion 1652.
- the load detection module 1650m is integrated and fixed to the frame 1650a by a bolt 1653 that is passed through the hole 1651b of the 3 component force sensor 1651 and screwed into the bolt hole 1652b of the pavement portion 1652.
- the upper surface of the pavement portion 1652 is horizontally arranged at the same height to form the road surface 1652a.
- the regions in the X-axis and Y-axis directions in which the load detection modules 1650 m are arranged are the detection regions of the sensor array unit 1650.
- the width (that is, the length in the Y-axis direction) Ly (FIG. 31) of the detection region of the sensor array unit 1650 is sufficiently wider than the tread width of the test tire T, and the total tire tread width of the test tire T is the road surface 1652a. Can be grounded to.
- the three-component force sensor 1651 detects the following three types of forces f R , f T , and f L applied to the road surface 1652a of each load detection module 1650 m (that is, applied to the tire tread surface). a) Radial force f R b) Tangent force f T c) Lateral force f L
- the load detection unit 165 By using the load detection unit 165, it is possible to detect the distribution of the force received by the road surface from the tire tread of the test tire T (that is, the force applied to the tire tread) and its time change.
- FIG. 38 is a block diagram showing a schematic configuration of the control system 1a of the tire test device 1.
- the control system 1a includes a control unit 72 that controls the operation of the entire device, a measurement unit 74 that performs various measurements, and an interface unit 76 that performs input / output to / from the outside.
- the control unit 72 includes the motor 141 of each drive unit 14, the motor 32 of the torque applying device 30, the motor 431 of the load adjustment unit 42, the motor 451 of the camber adjustment unit, the motor 471 of the slip angle adjustment unit 46, and the movement unit 1655.
- the motor 1655m is connected via the drivers 141a, 32a, 431a, 451a, 471a and 1655a, respectively.
- a temperature adjusting device 64c is connected to the control unit 72.
- the control unit 72 and the drivers 141a, 32a, 431a, 451a and 471a are communicably connected by an optical fiber, and high-speed feedback control is possible between the control unit 72 and each driver. This enables more accurate (high resolution and high accuracy on the time axis) synchronous control.
- a 6-component force sensor 54 of the spindle unit 50, a 3-component force sensor 1651 of the load detection unit 165, and a proximity sensor 1656c of the sensor position detection unit 1656 are connected to the measurement unit 74 via amplifiers 54a, 1651a, and 1656ca, respectively. ing.
- the signals from the 6-component force sensor 54, the 3-component force sensor 1651 and the proximity sensor 1656c are amplified by the amplifiers 54a, 1651a and 1656ca, respectively, and then converted into digital signals by the measuring unit 74, whereby measurement data is generated. To.
- the measurement data is input to the control unit 72.
- FIG. 38 only one of the three component force sensor 1651, the amplifier 1651a, the proximity sensor 1656c, and the amplifier 1656ca is shown.
- phase information detected by the rotary encoder RE built in each of the motors 141, 32, 431, 451, 471 and 1655 m is input to the control unit 72 via the drivers 141a, 32a, 451a, 471a and 1655a, respectively. ..
- the interface unit 76 is, for example, a user interface for inputting / outputting to / from a user, a network interface for connecting to various networks such as LAN (Local Area Network), and a USB (Universal Serial) for connecting to an external device. It is equipped with one or more of various communication interfaces such as Bus) and GPIB (General Purpose Interface Bus).
- the user interface includes, for example, various operation switches, displays, various display devices such as LCD (liquid crystal display), various pointing devices such as mice and touch pads, touch screens, video cameras, printers, scanners, buzzers, and speakers. Includes one or more of various input / output devices such as microphones, memory card readers / writers, etc.
- the control unit 72 can drive the carriage 20 at a predetermined speed by synchronously controlling the drive of the motor 141 of each drive unit 14 based on the speed setting data input via the interface unit 76. ..
- all four drive units 14 are driven in the same phase (more accurately, the left drive units 14LA and 14LB and the right drive units 14RA and 14RB are in opposite phase [reverse rotation]. Driven).
- control unit 72 controls the drive of the motor 32 of the torque applying device 30 based on the setting data of the front-rear force (braking force or driving force) to be applied to the test tire T acquired via the interface unit 76.
- a predetermined front-rear force can be applied to the test tire T.
- control unit 72 may apply a predetermined torque to the test wheel W by controlling the torque applying device 30 based on the torque setting data (or the acceleration setting data) instead of the front-rear force setting data. can.
- the control unit 72 controls the drive unit 14 that causes the carriage 20 to travel at a predetermined traveling speed (at the same time, rotates the test tire T at substantially the same peripheral speed as the traveling speed), and causes the test tire T to have a front-rear force (or torque).
- the control of the torque applying device 30 for giving the tire can be performed synchronously based on the synchronization signal.
- the waveform of the torque generated in the torque applying device 30 includes basic waveforms such as a sine wave, a sine half wave (half sine wave), a sawtooth wave (sawtooth wave), a triangular wave, and a trapezoidal wave, as well as measured in a road test.
- a front-back force (or torque) waveform, a front-back force (or torque) waveform obtained by simulation calculation, or any other synthetic waveform (for example, a waveform generated by a function generator or the like) can be used.
- the traveling speed of the carriage 20 in addition to the basic waveform, the waveform of the wheel rotation speed measured in the road test and the waveform of the speed change obtained by the simulation calculation.
- any other synthetic waveform eg, a waveform generated by a function generator or the like.
- the procedure for changing the position of the sensor array unit 1650 in the Y-axis direction by the moving unit 1655 will be described.
- the sensor array unit 1650 is arranged at a position where the proximity portion 1656ap of the movable arm 1656a faces the detection surface 1656cf of the central proximity sensor 1656c.
- the control unit 72 causes the driver to move the sensor array unit 1650 in the Y-axis positive direction.
- a counterclockwise rotation command is transmitted to the 1655a.
- the driver 1655a Upon receiving the counterclockwise rotation command, the driver 1655a supplies the motor 1655m with a driving current for counterclockwise rotation.
- the motor 1655m is driven counterclockwise by the drive current, the screw shaft 1655ba rotates counterclockwise together with the shaft of the motor 1655m, and the sensor array unit 1650 moves in the positive direction of the Y axis together with the nut 1655bb and the movable frame 1659. ..
- the proximity portion 1656ap of the movable arm 1656a moves away from the detection surface 1656cf of the central proximity sensor 1656c, and the central proximity sensor 1656c does not detect the proximity.
- the proximity portion 1656ap of the movable arm 1656a reaches a position facing the detection surface 1656cf of the proximity sensor 1656c on the left (Y-axis positive direction side).
- the proximity sensor 1656c on the left detects proximity and outputs a proximity signal indicating proximity detection.
- the measurement unit 74 which has received the proximity signal via the amplifier 1656ca, notifies the control unit 72 that the sensor array unit 1650 has reached the fixed position on the left side.
- the control unit 72 Upon receiving the notification from the measurement unit 74, the control unit 72 transmits a drive stop command to the driver 1655a.
- the driver 1655a stops supplying the drive current to the motor 1655m.
- the rotation of the shaft of the motor 1655 m and the screw shaft 1655ba is stopped, the nut 1655bb and the sensor array unit 1650 are also stopped, and the movement of the sensor array unit 1650 is completed.
- the length Ly (FIG. 31) of the detection region of the sensor array unit 1650 in the Y-axis direction can be shortened, and the number of load detection modules 1650 m required for load distribution measurement can be reduced. It will be possible to reduce the cost required for manufacturing and maintenance of the sensor array unit 1650.
- FIG. 34 is a flowchart showing the procedure of the method of acquiring the load distribution applied to the tire tread.
- the control unit 72 When the power switch of the tire test device 1 is turned on, the control unit 72 first performs the initialization process S1. As shown in FIG. 1, in the initial state, the carriage 20 is arranged at the initial position (initial traveling position) PX0 set near the end in the negative direction of the X-axis of the movable range. Further, the elevating frame 421 (FIG. 19) is arranged at the initial position PZ0 set near the upper end, for example, of the movable range. At the initial position P Z0 , the test wheel W rises from the road surface 63a, and the test wheel W can be attached / detached and the alignment can be adjusted. Further, the camber adjustment unit 44 and the slip angle adjustment unit 46 adjust the camber angle and the slip angle to the set values, respectively.
- the motor 32 of the torque applying device 30 is driven, the rotation position ⁇ W of the test wheel W moves to the initial rotation position ⁇ W0 , and the initialization process S1 is completed.
- the rotation position ⁇ H of the torque applying device 30 itself (that is, the rotation frame 31) is determined by the traveling position PX of the carriage 20.
- the torque applying device 30 is always arranged at the initial rotation position ⁇ H0 in the initial state.
- the first measurement set S5 is performed.
- the motor 141 of each drive unit 14 is driven, the carriage 20 travels at a set traveling speed, and the test wheel W rotates at substantially the same peripheral speed as the traveling speed of the carriage 20. Further, the motor 32 of the torque applying device 30 is driven, and the torque set in the test wheel W is applied.
- the time interval for detection by the 3-component force sensor 1651 and the 6-component force sensor 54 is appropriately set according to the test conditions (for example, the traveling speed of the carriage 20 and the required test accuracy).
- the traveling position PX of the carriage 20 and the rotation position ⁇ W of the test wheel W are calculated at predetermined time intervals (for example, the same time interval as the detection by the 3 component force sensor 1651).
- the traveling position PX of the carriage 20 is calculated from the detection result of the rotary encoder RE (FIG. 38) built in the motor 141 of the drive unit 14, the reduction ratio of the belt mechanism 142, and the pitch circle diameter of the drive pulley 152 of the belt mechanism 15. Will be done.
- the traveling position PX of the carriage 20 is defined as the position of the rotation axis Ay of the test wheel W in the traveling direction (X-axis direction) of the carriage 20.
- the rotation position ⁇ W of the test wheel W is calculated based on the detection results of the rotary encoder 38 of the torque applying device 30 and the rotary encoder RE built in the motor 32. Specifically, the rotation position ⁇ W of the test wheel W is the rotation position ⁇ M of the shaft 321 of the motor 32 detected by the rotary encoder RE of the motor 32 (however, the initial rotation position ⁇ M0 in the initial state is 0 [rad]. ] And the reduction ratio of the speed reducer 33 (that is, the rotation position ⁇ S of the shaft 34 with respect to the rotation frame 31) is the rotation position of the rotation frame 31 of the torque applying device 30 detected by the rotary encoder 38. Calculated by adding to ⁇ H.
- a detection means such as a rotary encoder for detecting the rotation position ⁇ T of the output from the torque applying device 30 (for example, the rotation position of the spindle 52 and the transmission shafts 261 and 266) is provided, and the test wheel W is provided with the detection means. It may be configured to directly detect the rotation position ⁇ W.
- the detection results of the 3-component force sensor 1651 and the 6-component force sensor 54 are the detection results of the rotary encoder RE built in the motor 141 of the drive unit 14 detected at the same timing (that is, the traveling position PX of the carriage 20) and the detection results. It is accessible by the storage device 721 of the control unit 72 (or the control unit 72 such as the server 77 connected to the control unit 72 via a LAN, for example, in association with the detection result of the rotation position ⁇ W of the test wheel W. It is stored in the storage means). As for the detection result by the 3-component force sensor 1651, only the period during which the test wheel W passes through the sensor array unit 1650 and a predetermined period before and after the period may be recorded. As a result, the amount of data to be stored can be reduced.
- the load adjusting unit 42 raises the test wheel W to a height at which the test wheel W rises from the road surface 63a (for example, the same height as the initial state) (S6). Then, the drive unit 14 is driven, and the carriage 20 moves to the initial position PX0 (S7).
- the angle width ⁇ W is, for example, the central angle ⁇ C1 of the test wheel W corresponding to the length Lx (FIG. 30) of the detection region of the sensor array unit 1650 in the X-axis direction (that is, the test wheel W rolls the distance Lx).
- Rotation angle ⁇ C1 The value is set to the following.
- the angle width ⁇ W is set to the same value as the central angle ⁇ C2 of the test wheel W corresponding to the arrangement interval ⁇ (FIG. 30) of the load detection module 1650 m, or a value slightly smaller than the central angle ⁇ C2 .
- angle width ⁇ W may be set to, for example, a value obtained by dividing 2 ⁇ by a specified number of times n. In this case, the entire circumference of the test wheel W is measured by the n-time measurement set.
- FIG. 35 is a flowchart showing the procedure of the load profile calculation S10.
- the load profile calculation S10 is a process of calculating the load profile data based on the measurement results acquired by the n-time measurement set S5.
- the load profile data is data in which the values of three types of forces applied to the tire (that is, radial force f R , tangential force f T , and lateral force f L ) are associated with the plane coordinates on the road surface.
- the coordinates of each load detection module 1650 m are calculated (S101).
- the coordinates of the point at the center of the upper surface of the load detection module 1650 m are defined as the coordinates of the load detection module 1650 m.
- FIG. 36 is a diagram showing the positional relationship between the load detection module 1650 m and the rotation axis Ay of the test wheel W.
- 150 load detection modules 1650 m are arranged in 5 rows in the X-axis direction and 30 rows in the Y-axis direction.
- the column number in the X-axis direction of the load detection module 1650 m is p
- the column number in the Y-axis direction is q
- the arrangement of the load detection module 1650 m is a pair of positive integers [p, q] (hereinafter). It is represented by "address [p, q]").
- the (x, y) coordinate system is a two-dimensional Cartesian coordinate system parallel to the (X, Y) coordinate system, whose origin is the center of the upper surface of the load detection module 1650 m arranged at the address [3, 1]. That is, the xy plane is a plane on which the road surfaces 63a and 1652a of the road surface portion 60 are arranged. Further, in the present embodiment, the origin of the (x, y) coordinate system (that is, the position of the load detection module 1650 m at the address [3, 1]) is defined as the position of the sensor array unit 1650.
- the coordinates with the fixed point as the origin are referred to as absolute coordinates
- the coordinates with the movable point as the origin are referred to as relative coordinates.
- the absolute coordinates of each load detection module 1650 m are calculated.
- coordinate x Ay PX -SX however, PX: X coordinate of the traveling position PX (rotation axis Ay) of the test wheel W SX: X coordinate of the origin of the (x, y) coordinate system
- the coordinates of the rotation axis Ay of the test wheel W are converted from the XY coordinate system to the xy coordinate system.
- the relative position (relative coordinates) of the load detection module 1650 m with reference to the traveling position PX (rotation axis Ay) of the test wheel W is calculated (S103).
- the relative coordinates (x r , y r ) of the load detection module 1650 m are calculated by the following equation.
- the load profile data of the coordinates relative to the rotation axis Ay is acquired.
- the load profile data may be calculated as an approximate curved surface obtained by regression analysis (for example, curved surface fitting such as the least squares method).
- the load profile data may be calculated in consideration of the rotation position ⁇ W of the test wheel W (that is, for each rotation position ⁇ W ). Further, in this case, the load profile data may be further calculated including the symmetry around the rotation axis Ay of the tread pattern of the test tire T. Specifically, the load profile data may be calculated for each rotation position ⁇ W having the same phase in the period in the circumferential direction of the tread pattern.
- the measurement is performed for only one round of the test wheel W by the n-time measurement set, but the measurement set may be further increased to perform the measurement for a plurality of rounds.
- the rotation position ⁇ W of the test wheel W at the initial position PX 0 is changed by the central angle ⁇ C2 of the test wheel W corresponding to the arrangement interval ⁇ of the load detection module 1650 m, and a plurality of measurement sets are performed. Therefore, the resolution of the load profile data in the x-axis direction is about the arrangement interval ⁇ of the load detection module 1650 m.
- the substantial resolution in the x-axis direction can be obtained from the arrangement interval ⁇ of the load detection module 1650 m. Can also be finely divided. For example, when the measurement set is repeated while changing the rotation position ⁇ W by 1 / m of the central angle ⁇ C2 (where m is a natural number), the actual resolution in the x-axis direction is reduced to about ⁇ / m. be able to.
- the length Lx (FIG. 30) of the detection region of the sensor array unit 1650 in the X-axis direction is shorter than the length of the tire tread in the X-axis direction. Therefore, it is not possible to acquire the entire load distribution of the tire tread only by rolling the test wheel W on the sensor array unit 1650 once.
- a method is adopted in which the load distribution on the tire tread is measured in a plurality of times while shifting the rotation position ⁇ W of the test wheel W when rolling on the sensor array unit 1650. This makes it possible to shorten the length of the detection region of the sensor array unit 1650 in the X-axis direction and reduce the number of load detection modules 1650 m required for measuring the load distribution. It is possible to reduce the cost required for maintenance.
- the substantial resolution in the y-axis direction can be reduced.
- a motor capable of position control for example, a servo motor, a stepping motor, or the like
- the substantial resolution in the y-axis direction can be reduced to about 1 mm.
- FIG. 37 is a display example of the load profile image.
- 37 (a) is a load profile image of a tangential force f T
- FIG. 37 (b) is a lateral force f L
- FIG. 37 (c) is a load profile image of a radial force f R.
- the load profile image shown in FIG. 37 is obtained by converting the value of the force at each position ( xr , yr ) into lightness.
- the form of the load profile image is not limited to that of the present embodiment, and may be another form such as a three-dimensional CG image.
- an embodiment of the present application also includes a configuration such as an embodiment, which is exemplified in the present specification, and / or a configuration in which a configuration such as an embodiment, which is obvious to those skilled in the art from the description in the present specification, is appropriately combined. ..
- the tire test device 1 includes two belt mechanisms 15 in the above embodiment, but may be configured to include one or three or more belt mechanisms 15.
- the belt mechanism 15 is driven by the power generated by the pair of drive units 14, but may be driven by one or more drive units 14.
- a toothed belt and a toothed pulley are used for each of the belt mechanisms 15, 24, 25, but for one or more of the belt mechanisms, a flat belt, a V-belt, or a width is used instead of the toothed belt.
- a V-ribbed belt having a plurality of V-shaped ribs arranged in a direction may be used.
- a general-purpose belt having a core wire made by twisting glass fibers may be used.
- another type of winding transmission mechanism such as a chain transmission mechanism or a wire transmission mechanism, or another type of power transmission mechanism such as a ball screw mechanism, a gear transmission mechanism or a hydraulic mechanism is used instead of each belt mechanism.
- another type of winding transmission mechanism such as a chain transmission mechanism or a wire transmission mechanism, or another type of power transmission mechanism such as a ball screw mechanism, a gear transmission mechanism or a hydraulic mechanism is used. You may.
- the power for driving the carriage 20 and the power for driving the test wheel W are supplied by the common drive unit 14 and transmitted by the common belt mechanism 15, according to the present invention. It is not limited to this configuration.
- the power for driving the carriage 20 and the power for driving the test wheel W may be generated by individual drive units and transmitted by individual power transmission means (for example, individual belt mechanisms).
- individual power transmission means for example, individual belt mechanisms.
- the mechanism for driving the carriage 20 (carriage driving means) and a part of the mechanism for driving the test wheel W (test wheel driving means) (driving unit 14 and belt mechanism 15) are shared.
- a simple drive system and control system have been realized.
- the commonality of the carriage drive means and the test wheel drive means (particularly, the common drive unit 14) is driven by introducing a torque applying device 30 and separating the power source of the speed control and the torque control of the test wheel W. This is possible because the addition carried by the unit 14 is reduced.
- the right drive units 14RA and 14RB serve as the carriage drive means and the rotary motion supply means
- the left drive units 14LA and 14LB function as the carriage drive means.
- the present invention has been adopted. Is not limited to this configuration.
- the drive units 14LA and 14LB on the left side may serve as the carriage driving means and the rotary motion supply means
- the drive units 14RA and 14RB on the right side may function as the carriage driving means.
- both the drive units 14LA and 14LB on the left side and the drive units 14RA and 14RB on the right side may be configured to serve as both the carriage drive means and the rotary motion supply means.
- a total of two shafts 223B of the first driven portion 22 and 22L are connected (in other words, replaced with one long shaft 223B connecting the left and right first driven portions 22 and 22L). It will be realized.
- the tire is longer than the length Lx of the detection region of the sensor array unit 1650 in the X-axis direction. It enables the measurement of the load profile of the tread.
- the rotation position ⁇ W of the test wheel W at the initial position P Z0 is not changed for each measurement set, and the length is higher than the length Lx. Allows measurement of load profiles on long tire treads.
- the means capable of changing the position of the sensor array unit 1650 in the X-axis direction can be configured by, for example, a position-controllable motor and a feed screw mechanism (for example, a ball screw mechanism), similarly to the moving unit 1655.
- the rod 124a and the like are supported by a pair of single row bearings 127a and the like, but the present invention is not limited to this configuration, and for example, one or more.
- the rod may be supported by double-row or single-row bearings.
- the heat-treated rail is used in the guide mechanism 12 of the track portion 10, but the present invention is not limited to this configuration, for example, a normal rail (JIS E 1101: 2001) or a light rail (JIS E). 1103: 1993) may be used. Further, not limited to the flat bottom rail, rails having other shapes such as double-headed rails, cow-headed rails, and bridge rails may be used.
- the motor 141 (AC servo motor) is used for the drive unit 14, but the present invention is not limited to this configuration. Even if another type of motor capable of speed control or position control (for example, a DC servo motor or a so-called inverter motor that combines an inverter circuit and an AC motor or a brushless motor) is used instead of the AC servo motor. good.
- the motors 32, 451 and 461 which are AC servomotors, are used for the torque applying device 30, the load adjusting unit 42 and the slip angle adjusting unit 46, respectively, but the present invention is not limited to this configuration. ..
- the AC servo motor instead of the AC servo motor, another type of motor capable of position control (for example, DC servo motor, stepping motor, etc.) may be used.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Tires In General (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180067381.3A CN116368361A (zh) | 2020-09-30 | 2021-09-29 | 轮胎测试装置 |
| KR1020237014571A KR20230082032A (ko) | 2020-09-30 | 2021-09-29 | 타이어 시험 장치 |
| ES21875695T ES3053072T3 (en) | 2020-09-30 | 2021-09-29 | Tire testing apparatus |
| EP21875695.5A EP4224137B1 (en) | 2020-09-30 | 2021-09-29 | Tire testing apparatus |
| US18/182,433 US20230213411A1 (en) | 2020-09-30 | 2023-03-13 | Tire testing device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020166577A JP7644950B2 (ja) | 2020-09-30 | 2020-09-30 | タイヤ試験装置 |
| JP2020-166577 | 2020-09-30 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/182,433 Continuation-In-Part US20230213411A1 (en) | 2020-09-30 | 2023-03-13 | Tire testing device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022071395A1 true WO2022071395A1 (ja) | 2022-04-07 |
Family
ID=80950622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/035867 Ceased WO2022071395A1 (ja) | 2020-09-30 | 2021-09-29 | タイヤ試験装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20230213411A1 (https=) |
| EP (1) | EP4224137B1 (https=) |
| JP (1) | JP7644950B2 (https=) |
| KR (1) | KR20230082032A (https=) |
| CN (1) | CN116368361A (https=) |
| ES (1) | ES3053072T3 (https=) |
| TW (1) | TW202215017A (https=) |
| WO (1) | WO2022071395A1 (https=) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117330334A (zh) * | 2018-04-20 | 2024-01-02 | 国际计测器株式会社 | 轮胎测试装置 |
| JP7458051B2 (ja) | 2019-10-25 | 2024-03-29 | 国際計測器株式会社 | タイヤ試験装置 |
| DE102019216750A1 (de) * | 2019-10-30 | 2021-05-06 | Zf Friedrichshafen Ag | Prüfstand |
| DE102020211025A1 (de) * | 2020-09-02 | 2022-03-03 | Zf Friedrichshafen Ag | Kupplungsmodul für einen Antriebsstrangprüfstand, Abtriebsmodul und Antriebsstrangprüfstand |
| CN116929799B (zh) * | 2023-06-07 | 2025-10-10 | 青岛森麒麟轮胎股份有限公司 | 一种轮胎弯道侧偏实验设备及测试方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007522467A (ja) * | 2004-02-11 | 2007-08-09 | エアバス・フランス | 可動式タイヤ試験機およびそのための方法 |
| JP2009180715A (ja) * | 2008-02-01 | 2009-08-13 | Kobe Steel Ltd | タイヤ試験装置及びタイヤ試験方法 |
| JP2013156087A (ja) * | 2012-01-27 | 2013-08-15 | Bridgestone Corp | タイヤ試験装置 |
| JP2015072215A (ja) | 2013-10-03 | 2015-04-16 | 株式会社ブリヂストン | タイヤ試験装置およびタイヤ試験方法 |
| JP2016080414A (ja) * | 2014-10-10 | 2016-05-16 | 国際計測器株式会社 | タイヤ路上試験装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019026733A1 (ja) * | 2017-08-03 | 2019-02-07 | 国際計測器株式会社 | タイヤ試験方法、タイヤ試験装置及び散布装置 |
| JP6660497B2 (ja) * | 2019-02-19 | 2020-03-11 | 国際計測器株式会社 | タイヤ路上試験装置 |
-
2020
- 2020-09-30 JP JP2020166577A patent/JP7644950B2/ja active Active
-
2021
- 2021-09-28 TW TW110136005A patent/TW202215017A/zh unknown
- 2021-09-29 WO PCT/JP2021/035867 patent/WO2022071395A1/ja not_active Ceased
- 2021-09-29 CN CN202180067381.3A patent/CN116368361A/zh active Pending
- 2021-09-29 ES ES21875695T patent/ES3053072T3/es active Active
- 2021-09-29 EP EP21875695.5A patent/EP4224137B1/en active Active
- 2021-09-29 KR KR1020237014571A patent/KR20230082032A/ko active Pending
-
2023
- 2023-03-13 US US18/182,433 patent/US20230213411A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007522467A (ja) * | 2004-02-11 | 2007-08-09 | エアバス・フランス | 可動式タイヤ試験機およびそのための方法 |
| JP2009180715A (ja) * | 2008-02-01 | 2009-08-13 | Kobe Steel Ltd | タイヤ試験装置及びタイヤ試験方法 |
| JP2013156087A (ja) * | 2012-01-27 | 2013-08-15 | Bridgestone Corp | タイヤ試験装置 |
| JP2015072215A (ja) | 2013-10-03 | 2015-04-16 | 株式会社ブリヂストン | タイヤ試験装置およびタイヤ試験方法 |
| JP2016080414A (ja) * | 2014-10-10 | 2016-05-16 | 国際計測器株式会社 | タイヤ路上試験装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4224137A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4224137A1 (en) | 2023-08-09 |
| CN116368361A (zh) | 2023-06-30 |
| KR20230082032A (ko) | 2023-06-08 |
| US20230213411A1 (en) | 2023-07-06 |
| ES3053072T3 (en) | 2026-01-19 |
| EP4224137B1 (en) | 2025-10-29 |
| JP2022058016A (ja) | 2022-04-11 |
| TW202215017A (zh) | 2022-04-16 |
| EP4224137A4 (en) | 2024-10-16 |
| JP7644950B2 (ja) | 2025-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7618280B2 (ja) | タイヤ試験装置 | |
| JP7730198B2 (ja) | タイヤ試験装置 | |
| WO2022071395A1 (ja) | タイヤ試験装置 | |
| WO2023058777A1 (ja) | タイヤ試験方法、タイヤ試験システムおよびプログラム | |
| RU2836068C1 (ru) | Устройство для испытаний шин | |
| RU2819633C1 (ru) | Устройство для испытаний шин |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21875695 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE1 | Request for preliminary examination filed after expiration of 19th month from priority date (pct application filed from 20040101) | ||
| WWE | Wipo information: entry into national phase |
Ref document number: 202317022608 Country of ref document: IN |
|
| ENP | Entry into the national phase |
Ref document number: 20237014571 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021875695 Country of ref document: EP Effective date: 20230502 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 2023111016 Country of ref document: RU |
|
| WWG | Wipo information: grant in national office |
Ref document number: 2021875695 Country of ref document: EP |