WO2021261150A1 - 情報処理装置、その作動方法及び作動プログラム - Google Patents
情報処理装置、その作動方法及び作動プログラム Download PDFInfo
- Publication number
- WO2021261150A1 WO2021261150A1 PCT/JP2021/019680 JP2021019680W WO2021261150A1 WO 2021261150 A1 WO2021261150 A1 WO 2021261150A1 JP 2021019680 W JP2021019680 W JP 2021019680W WO 2021261150 A1 WO2021261150 A1 WO 2021261150A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- reconstructed
- local area
- information processing
- reconstruction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/73—Deblurring; Sharpening
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/04—Processes or apparatus for producing holograms
- G03H1/0443—Digital holography, i.e. recording holograms with digital recording means
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/04—Processes or apparatus for producing holograms
- G03H1/08—Synthesising holograms, i.e. holograms synthesized from objects or objects from holograms
- G03H1/0866—Digital holographic imaging, i.e. synthesizing holobjects from holograms
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/0005—Adaptation of holography to specific applications
- G03H2001/005—Adaptation of holography to specific applications in microscopy, e.g. digital holographic microscope [DHM]
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/04—Processes or apparatus for producing holograms
- G03H1/0443—Digital holography, i.e. recording holograms with digital recording means
- G03H2001/0447—In-line recording arrangement
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/04—Processes or apparatus for producing holograms
- G03H1/08—Synthesising holograms, i.e. holograms synthesized from objects or objects from holograms
- G03H1/0866—Digital holographic imaging, i.e. synthesizing holobjects from holograms
- G03H2001/0883—Reconstruction aspect, e.g. numerical focusing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10141—Special mode during image acquisition
- G06T2207/10148—Varying focus
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20092—Interactive image processing based on input by user
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30024—Cell structures in vitro; Tissue sections in vitro
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30168—Image quality inspection
Definitions
- the technology of the present disclosure relates to an information processing device, an operation method thereof, and an operation program.
- So-called lens-free digital holography which eliminates optical system components, is known in order to reduce the size of a device that captures images of small objects to be observed such as cells.
- digital holography an object to be observed is imaged using a light source that emits coherent light such as laser light, and one interference fringe image obtained by the imaging is reconstructed to reconstruct an image at an arbitrary reconstructed position. Can be generated.
- the reconstruction position which is the distance from the image pickup sensor to the light source, is used as a parameter.
- the reconstructed position is a position corresponding to the focal length described in Patent Document 1.
- Patent Document 1 in order to shorten the search time for the in-focus position, the observation target object is specified in the reconstructed image, the search range is limited to the local region where the specified observation target object exists, and the focus is set. It has been proposed to search for a location.
- Patent Document 1 In the technique described in Patent Document 1, the object to be observed is specified based on the reconstructed image. Therefore, in order to specify the object to be observed, it is necessary to temporarily set the reconstructed position and generate it as a primary reconstructed image. There is. Since this primary reconstructed image is a reconstructed image generated at a reconstructed position irrelevant to the in-focus position and has poor image quality, it is difficult to properly identify a region including an object to be observed. Therefore, in Patent Document 1, a filtering process is performed in order to improve the image quality of the primary reconstructed image. When such a filtering process is performed, the calculation load becomes large and the search efficiency decreases.
- the information processing apparatus of the present disclosure is an information processing apparatus that reconstructs an original image including an interference fringe image of at least one observation target object, and includes at least one processor.
- Local area information acquisition processing that acquires local area information that represents a local area including an interference fringe image in the original image
- reconstruction processing that generates a reconstructed image while changing the reconstructed position with respect to the local area.
- Focusing position detection processing that detects the in-focus position where the sharpness is maximized by calculating the sharpness of the reconstructed image each time the reconstructed image is generated by the processing, and reconstruction at the in-focus position.
- the optimum reconstruction image output process for outputting the image as the optimum reconstruction image is executed.
- the processor executes reconstruction processing, focusing position detection processing, and optimum reconstruction image output processing for each of the local areas. Is preferable.
- the processor executes the whole image generation process of generating the whole image by arranging the optimum reconstructed image for each local area output by the optimal reconstructed image output process in the reference image.
- the reference image is an original image, and it is preferable that the processor generates the entire image by arranging the optimum reconstructed image in the corresponding local region in the original image in the whole image generation process.
- the processor preferably generates a reconstructed image based on the imaging conditions in which the original image was captured.
- the imaging conditions include the wavelength of the irradiation light irradiating the object to be observed.
- the imaging conditions include the position of the object to be observed.
- the processor starts the change of the reconstruction position from the initial position in the reconstruction process, and stops the change of the reconstruction position when one focus position is detected in the focus position detection process, thereby performing the reconstruction process. It is preferable to finish.
- the processor starts the change of the reconstruction position from the initial position in the reconstruction process and ends the reconstruction process when the reconstruction position reaches the final position.
- the processor When the processor detects a plurality of in-focus positions for one local area in the in-focus position detection process, the processor outputs a plurality of optimum reconstructed images for one local area in the optimum reconstructed image output process. Is preferable.
- the processor acquires the local area information based on the user's setting operation in the local area information acquisition process.
- the processor acquires the local area information by performing image analysis based on the original image in the local area information acquisition process.
- the method of operating the information processing apparatus of the present disclosure is a method of operating an information processing apparatus that reconstructs an original image including an interference fringe image of at least one observation target object, and is a local region including the interference fringe image in the original image.
- the local area information acquisition process that acquires the local area information that represents Focusing position detection processing that detects the focusing position where the sharpness is maximized by calculating the sharpness of the constituent image, and optimal reconstruction that outputs the reconstructed image at the focusing position as the optimal reconstructed image. Includes image output processing.
- the operation program of the present disclosure is an operation program that causes a computer to execute a process of reconstructing an original image including an interference fringe image of at least one observation target object, and represents a local region including the interference fringe image in the original image.
- the local area information acquisition process for acquiring local area information
- the reconstruction process for generating a reconstructed image while changing the reconstructed position for the local area, and the reconstructed image each time the reconstructed image is generated by the reconstructed process.
- Focusing position detection processing that detects the focusing position where the sharpness is maximized by calculating the sharpness of, and optimal reconstruction image output that outputs the reconstructed image at the focusing position as the optimal reconstructed image. Let the computer perform the processing.
- an information processing device capable of improving the search efficiency of the in-focus position, an operation method thereof, and an operation program.
- FIG. 1 shows an example of the configuration of the digital holography system 2.
- the digital holography system 2 includes an information processing device 10 and an image pickup device 11.
- An image pickup device 11 is connected to the information processing device 10.
- the culture vessel 13 of the cells 12 is inserted into the image pickup apparatus 11.
- the cell 12 is an example of an "observation target object" according to the technique of the present disclosure.
- the information processing device 10 is, for example, a desktop type personal computer.
- a display 5, a keyboard 6, a mouse 7, and the like are connected to the information processing apparatus 10.
- the keyboard 6 and the mouse 7 constitute an input device 8 for the user to input information.
- the input device 8 also includes a touch panel and the like.
- FIG. 2 shows an example of the configuration of the image pickup apparatus 11.
- the image pickup apparatus 11 has a light source 20, a stage 21, and an image pickup sensor 22.
- the light source 20 is, for example, a laser diode.
- the light source 20 may be configured by combining a light emitting diode and a pinhole.
- the stage 21 has a translucent property, and the culture vessel 13 is placed on the stage 21.
- the light source 20 irradiates the irradiation light 23 toward the culture vessel 13 placed on the stage 21.
- the irradiation light 23 is coherent light.
- the irradiation light 23 is incident on the culture vessel 13, passes through the culture vessel 13 and the stage 21, and then is incident on the image pickup surface 22A of the image pickup sensor 22.
- the Z direction indicated by the arrow is the irradiation direction of the irradiation light 23.
- the image sensor 22 is composed of, for example, a monochrome CMOS (Complementary Metal Oxide Semiconductor) type image sensor.
- CMOS Complementary Metal Oxide Semiconductor
- the image pickup operation of the image pickup sensor 22 is controlled by the information processing device 10.
- the image pickup sensor 22 is arranged so that the image pickup surface 22A is orthogonal to the Z direction.
- FIG. 3 shows an example of the configuration of the image pickup sensor 22.
- the image pickup sensor 22 has a plurality of pixels 22B arranged on the image pickup surface 22A.
- the pixel 22B is a photoelectric conversion element that outputs a pixel signal according to the amount of incident light by photoelectrically converting the incident light.
- Pixels 22B are arranged at equal pitches along the X and Y directions.
- the array of pixels 22B is a so-called square array.
- the X direction is a direction orthogonal to the Z direction.
- the Y direction is a direction orthogonal to the X direction and the Z direction.
- the pixels 22B are arranged in the X direction at the first arrangement pitch ⁇ x and are arranged in the Y direction at the second arrangement pitch ⁇ y.
- the image pickup sensor 22 captures the light incident on the image pickup surface 22A and outputs image data composed of pixel signals output from each of the pixels 22B. In the following, it is simply said to output an image.
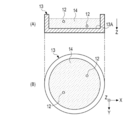
- FIG. 4 shows an example of the culture vessel 13.
- FIG. 4A is a cross-sectional view of the culture vessel 13 cut along a plane parallel to the Z direction.
- FIG. 4B is a plan view of the culture vessel 13 as viewed from the Z direction.
- the culture container 13 is a container having a circular outer shape in a plan view, and for example, a medium solution 14 containing cells 12 is injected.
- the medium solution 14 injected into the culture vessel 13 may contain a plurality of cells 12.
- the irradiation light 23 is incident on the culture vessel 13, and the irradiation light 23 is diffracted by the cells 12, so that an interference fringe image reflecting the shape of the cells 12 is generated.
- the interference fringe image is also referred to as a hologram image.
- FIG. 5 shows how the cell 12 generates the interference fringe image 33.
- a part of the irradiation light 23 incident on the culture vessel 13 is diffracted by the cells 12. That is, the irradiation light 23 is divided into a diffracted light 30 diffracted by the cells 12 and a transmitted light 31 that is not diffracted by the cells 12 and passes through the culture vessel 13.
- the transmitted light 31 is a plane wave.
- the diffracted light 30 and the transmitted light 31 pass through the bottom surface 13A of the culture container 13 and enter the image pickup surface 22A of the image pickup sensor 22.
- the diffracted light 30 and the transmitted light 31 interfere with each other to generate an interference fringe image 33.
- the interference fringe image 33 is composed of a bright portion 36 and a dark portion 38.
- the interference fringe image 33 shows the bright portion 36 and the dark portion 38 as circles, respectively, but the shape of the interference fringe image 33 changes depending on the shape and internal structure of the cell 12.
- the image pickup sensor 22 captures an optical image including the interference fringe image 33 formed on the image pickup surface 22A, and outputs an original image OP (see FIG. 8) including the interference fringe image 33.
- FIGS. 6 and 7 show the wavefronts of the diffracted light 30 and the transmitted light 31.
- FIG. 6 shows the wavefront when the diffracted light 30 and the transmitted light 31 strengthen each other.
- FIG. 7 shows the wavefront when the diffracted light 30 and the transmitted light 31 weaken each other.
- the solid line indicates the wavefront with the maximum amplitude of the diffracted light 30 and the transmitted light 31.
- the broken line indicates the wavefront with the minimum amplitude of the diffracted light 30 and the transmitted light 31.
- the white spot 35 shown on the image pickup surface 22A is a portion where the wavefronts of the diffracted light 30 and the transmitted light 31 are aligned and strengthened.
- the portion of the white spot 35 corresponds to the bright portion 36 (see FIG. 5) of the interference fringe image 33.
- the black spot 37 shown on the image pickup surface 22A is a portion where the wavefronts of the diffracted light 30 and the transmitted light 31 are deviated by half a wavelength and weaken each other.
- the portion of the black dot 37 corresponds to the dark portion 38 (see FIG. 5) of the interference fringe image 33.
- FIG. 8 shows an example of the original image OP output from the image pickup sensor 22.
- the original image OP shown in FIG. 8 illustrates the case where two cells 12 are present in the culture vessel 13 (see FIG. 4).
- the original image OP includes two interference fringe images 33 generated by the irradiation light 23 incident on the culture vessel 13 being diffracted by each cell 12.
- FIG. 9 shows an example of the hardware configuration of the information processing apparatus 10.
- the information processing device 10 includes a CPU (Central Processing Unit) 40, a storage device 41, and a communication unit 42, which are interconnected via a bus line 43. Further, the display 5 and the input device 8 described above are connected to the bus line 43.
- a CPU Central Processing Unit
- the CPU 40 is an arithmetic unit that realizes various functions by reading the operation program 41A stored in the storage device 41 and various data (not shown) and executing processing.
- the CPU 40 is an example of a processor according to the technique of the present disclosure.
- the storage device 41 includes, for example, a RAM (RandomAccessMemory), a ROM (ReadOnlyMemory), a storage device, or the like.
- the RAM is, for example, a volatile memory used as a work area or the like.
- the ROM is, for example, a non-volatile memory such as an operation program 41A and a flash memory that holds various data.
- the storage device is, for example, an HDD (Hard Disk Drive) or an SSD (Solid State Drive).
- the storage stores an OS (Operating System), an application program, image data, various data, and the like.
- the communication unit 42 is a network interface that controls transmission of various information via a network such as LAN (Local Area Network) or WAN (Wide Area Network).
- the information processing device 10 is connected to the image pickup device 11 via the communication unit 42.
- the display 5 displays various screens.
- the information processing device 10 receives input of an operation instruction from the input device 8 through various screens.
- FIG. 10 shows an example of the functional configuration of the information processing apparatus 10.
- the function of the information processing apparatus 10 is realized by the CPU 40 executing a process based on the operation program 41A.
- the CPU 40 includes an image pickup control unit 50, an original image acquisition unit 51, a local area information acquisition unit 52, a reconstruction image generation unit 53, a focusing position detection unit 54, and an optimum reconstruction image output unit 55.
- the whole image generation unit 56, and the display control unit 57 are configured.
- the image pickup control unit 50 controls the operation of the image pickup device 11. Specifically, the image pickup control unit 50 controls the operation of generating the irradiation light 23 by the light source 20 and the image pickup operation of the image pickup sensor 22. Hereinafter, the operation of generating the irradiation light 23 by the light source 20 and the image pickup operation of the image pickup sensor 22 are collectively referred to as an image pickup operation of the image pickup apparatus 11.
- the image pickup control unit 50 causes the image pickup device 11 to perform an image pickup operation based on the operation signal input from the input device 8.
- the original image acquisition unit 51 acquires the original image OP (see FIG. 8) output as a result of the image pickup device 11 imaging the culture vessel 13.
- the original image acquisition unit 51 stores the acquired original image OP in the storage device 41.
- the local area information acquisition unit 52 acquires the local area information 52A representing the local area including the area including the interference fringe image 33 based on the original image OP stored in the storage device 41. For example, as shown in FIG. 11, the local area information acquisition unit 52 performs image analysis on the original image OP to obtain a rectangular local area LA including the interference fringe image 33 for each interference fringe image 33. To detect. The local area information acquisition unit 52 generates local area information 52A indicating the position and size of the detected local area LA. The local area information acquisition unit 52 inputs the acquired local area information 52A to the reconstruction image generation unit 53.
- the local area information acquisition unit 52 is not limited to image analysis, and may detect the local area LA by image recognition processing using a technique such as machine learning.
- the reconstructed image generation unit 53 generates the reconstructed image RP while changing the reconstructed position with respect to the local area LA of the original image OP based on the local area information 52A.
- the reconstructed image generation unit 53 includes a local image extraction unit 53A and a calculation unit 53B.
- the local image extraction unit 53A extracts a local image LP by cutting out a portion corresponding to the local region LA from the original image OP stored in the storage device 41, and inputs the extracted local image LP to the calculation unit 53B.
- the local image extraction unit 53A extracts the local image LP for each local area LA and inputs the local image LP to the calculation unit 53B.
- the calculation unit 53B generates a reconstructed image RP by performing a calculation based on the local image LP input from the local image extraction unit 53A.
- the calculation unit 53B generates a reconstructed image RP each time the reconstructed position P is changed while changing the reconstructed position P by a constant value.
- the reconstruction position P is a position (so-called depth position) represented by a distance d from the image pickup surface 22A of the image pickup sensor 22 toward the light source 20.
- the calculation unit 53B performs reconstruction processing based on, for example, the Fresnel conversion formulas represented by the following formulas (1) to (3).
- I (x, y) represents a local image LP.
- x represents the coordinates of the pixel 22B (see FIG. 3) of the image pickup sensor 22 with respect to the X direction.
- y represents the coordinates of the pixel 22B with respect to the Y direction.
- ⁇ x is the above-mentioned first arrangement pitch
- ⁇ y is the above-mentioned second arrangement pitch (see FIG. 3).
- ⁇ is the wavelength of the irradiation light 23.
- ⁇ (m, n) is a complex amplitude image in which the local image LP is Fresnel-transformed.
- m 1,2,3, ... Nx-1
- n 1,2,3, ... Ny-1.
- Nx represents the number of arrangements of the pixels 22B in the X direction in the local region LA from which the local image LP is extracted.
- Ny represents the number of arrangements of the pixels 22B in the Y direction in the local region LA from which the local image LP is extracted.
- a 0 (m, n) is an intensity distribution image representing the intensity component of the complex amplitude image ⁇ (m, n).
- ⁇ 0 (m, n) is a phase distribution image representing the phase component of the complex amplitude image ⁇ (m, n).
- the calculation unit 53B obtains the complex amplitude image ⁇ (m, n) by applying the local image LP to the formula (1), and obtains the obtained complex amplitude image ⁇ (m, n) in the formula (2) or the formula (2). By applying to 3), the intensity distribution image A 0 (m, n) or the phase distribution image ⁇ 0 (m, n) is obtained. The calculation unit 53B obtains one of the intensity distribution image A 0 (m, n) and the phase distribution image ⁇ 0 (m, n) and outputs it as a reconstructed image RP.
- the calculation unit 53B outputs the phase distribution image ⁇ 0 (m, n) as the reconstructed image RP.
- the phase distribution image ⁇ 0 (m, n) is an image showing the refractive index distribution of the object to be observed. Since the cell 12 which is the observation target object in the present embodiment is translucent, most of the irradiation light 23 is not absorbed by the cell 12, but is transmitted or diffracted. The statue hardly appears. Therefore, in the present embodiment, it is preferable to use the phase distribution image ⁇ 0 (m, n) as the reconstructed image RP.
- the wavelength ⁇ of the irradiation light 23 is included in, for example, the image pickup condition 11A supplied from the image pickup apparatus 11.
- the calculation unit 53B performs the calculation of the equation (1) using the value of the wavelength ⁇ included in the imaging condition 11A. Further, the calculation unit 53B obtains the complex amplitude image ⁇ (m, n) by performing the calculation of the equation (1) while changing the distance d corresponding to the reconstruction position P by a constant value, and obtains the complex amplitude image.
- ⁇ (m, n) is applied to Eq. (2) or Eq. (3).
- the reconstruction image generation unit 53 starts the change of the reconstruction position P from the initial position Pi, and sets the reconstruction position P to a constant value ⁇ P from the initial position Pi toward the final position Pf. Repeat the generation of the reconstructed image RP while changing it one by one.
- the initial position Pi and the final position Pf are preferably set so as to correspond to the lower limit and the upper limit of the range in which the cell 12 which is the observation target object exists in the Z direction.
- the initial position Pi is set to the vicinity of the bottom surface 13A of the culture vessel 13.
- the final position Pf is set to the vicinity of the upper end surface 13B (see FIG. 12) of the culture vessel 13.
- the change of the reconstruction position P corresponds to the change of the distance d in the equation (1).
- the reconstruction image generation unit 53 Each time the reconstructed image generation unit 53 generates the reconstructed image RP, the reconstructed image RP is output and stored in the storage device 41.
- the reconstruction image generation unit 53 receives the stop instruction 54A from the focusing position detection unit 54 described later, the reconstruction image generation unit 53 stops the change of the reconstruction position P.
- the reconstruction image generation unit 53 performs the above reconstruction processing for each of the local image LPs input from the local image extraction unit 53A.
- the reconstruction image generation unit 53 is not limited to the method using the Fresnel conversion formula, and may perform the reconstruction processing by a Fourier iterative phase retrieval method or the like.
- FIG. 14 shows an example of the flow of the reconstruction process S1 by the reconstruction image generation unit 53.
- the reconstructed image generation unit 53 acquires the image pickup condition 11A including the value of the wavelength ⁇ from the image pickup apparatus 11 (step S10).
- the reconstructed image generation unit 53 acquires the local area information 52A from the local area information acquisition unit 52 (step S11).
- the local area information 52A includes a plurality of local area LAs as shown in FIG.
- the reconstructed image generation unit 53 uses the local image extraction unit 53A to localize the local area LA from one of the plurality of local area LAs included in the local area information 52A based on the original image OP.
- Image LP is extracted (step S12).
- the reconstructed image generation unit 53 sets the reconstructed position P as the initial position Pi, and reconstructs the local image LP extracted by the local image extraction unit 53A by the calculation unit 53B to obtain the reconstructed image RP.
- the reconstructed image RP is a phase distribution image ⁇ 0 (m, n). The value of the wavelength ⁇ included in the imaging condition 11A acquired in step S10 is used to generate the reconstructed image RP.
- the reconstructed image generation unit 53 outputs the reconstructed image RP generated by the calculation unit 53B (step S14).
- the reconstructed image RP output from the reconstructed image generation unit 53 is stored in the storage device 41, and the focusing position detection unit 54 performs the focusing position detection process described later.
- the in-focus position detection unit 54 detects the in-focus position based on the reconstructed image RP input from the reconstructed image generation unit 53
- the in-focus position detection unit 54 issues a stop instruction 54A (see FIG. 12) to the reconstructed image generation unit 53. Send to.
- the reconstructed image generation unit 53 determines whether or not the stop instruction 54A has been received from the in-focus position detection unit 54 (step S15).
- the reconstruction image generation unit 53 changes the reconstruction position P by a constant value ⁇ P (step S16), and returns the process to step S13. ..
- the calculation unit 53B reconstructs the local image LP using the changed reconstruction position P, so that a new reconstruction image RP is generated. The processes from step S13 to step S16 are repeated until the determination is affirmed in step S15.
- the reconstructed local image LP is a plurality of local region LAs included in the local region information 52A. It is determined whether or not it corresponds to the final local region LA (step S16). That is, in step S16, the reconstruction image generation unit 53 determines whether or not the reconstruction has been performed for all of the plurality of local region LAs included in the local region information 52A.
- step S17 NO
- the process returns to step S12.
- step S12 the local image LP is extracted from the local region LA that has not been reconstructed from the plurality of local region LAs included in the local region information 52A. After that, in step S13, the same reconstruction as described above is performed.
- step S12 The processing from step S12 to step S17 is repeated until the determination is affirmed in step S17.
- the reconstructed image generation unit 53 determines that the reconstructed local image LP is the final local region LA (step S17: YES)
- the reconstructed image generation unit 53 ends a series of reconstructed processing S1.
- the focusing position detection unit 54 obtains the sharpness of each of the reconstructed image RPs output from the reconstructed image generation unit 53 and stored in the storage device 41, and the sharpness is maximized. Search for the configuration position P (that is, the in-focus position).
- the in-focus position detection unit 54 inputs the in-focus position information 54B representing the detected in-focus position to the optimum reconstruction image output unit 55.
- the in-focus position detection unit 54 calculates, for example, the contrast value of the reconstructed image RP as sharpness.
- the in-focus position detection unit 54 may use a value obtained by evaluating the spread of the image of the cell 12 in the reconstructed image RP by a cross-sectional profile or the like as the sharpness. Further, the in-focus position detection unit 54 may obtain the sharpness by performing frequency analysis by Fourier analysis or the like.
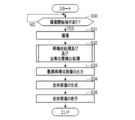
- FIG. 15 shows an example of the flow of the in-focus position detection process S2 by the in-focus position detection unit 54.
- the in-focus position detection unit 54 acquires one reconstructed image RP output from the reconstructed image generation unit 53 and stored in the storage device 41 (step S20).
- the in-focus position detection unit 54 calculates the sharpness of the acquired reconstructed image RP (step S21).
- step S22 determines whether or not the calculated sharpness has reached the maximum.
- step S22 determines that the sharpness has not reached the maximum (step S22: NO)
- the process returns to step S20.
- step S20 the focusing position detection unit 54 again acquires one reconstructed image RP output from the reconstructed image generation unit 53 and stored in the storage device 41. The processing from step S20 to step S22 is repeated until the determination is affirmed in step S22.
- step S22 When the in-focus position detection unit 54 determines that the calculated sharpness has reached the maximum (step S22: YES), the in-focus position detection unit 54 detects the reconstructed position P in which the sharpness is maximized as the in-focus position and focuses. Focus position information 54B is output (step S23). Then, the in-focus position detection unit 54 transmits the above-mentioned stop instruction 54A to the reconstruction image generation unit 53 (step S24). This completes the series of focusing position detection processes S2.
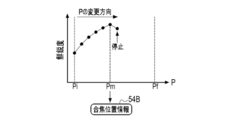
- FIG. 16 shows an example of the focus position search process.
- the in-focus position detection unit 54 determines the peak sharpness by, for example, a so-called mountain climbing method. Each time the in-focus position detection unit 54 calculates the sharpness, the calculated sharpness is plotted in association with the reconstructed position P. The sharpness increases as the reconstruction position P approaches the in-focus position Pm, and decreases after the in-focus position Pm. When the in-focus position detection unit 54 detects that the sharpness has changed from an increase to a decrease, the in-focus position detection unit 54 detects the previous reconstructed position P as the in-focus position Pm.
- the in-focus position Pm corresponds to the depth position of the cell 12 which is the object to be observed.
- the in-focus position detection unit 54 detects that the sharpness has changed from an increase to a decrease, the above-mentioned stop instruction 54A is transmitted to the reconstructed image generation unit 53.
- the optimum reconstructed image output unit 55 is at the in-focus position from the plurality of reconstructed image RPs stored in the storage device 41 based on the in-focus position information 54B input from the in-focus position detection unit 54.
- the reconstructed image RP is acquired and output as the optimum reconstructed image BP.
- the optimum reconstructed image BP output from the optimum reconstructed image output unit 55 is stored in the storage device 41.
- FIG. 17 shows an example of the optimum reconstruction image output processing by the optimum reconstruction image output unit 55.
- the optimum reconstructed image output unit 55 focuses on each of the plurality of local regions LA in one original image OP from the plurality of reconstructed image RPs based on the focusing position information 54B.
- the reconstructed image RP corresponding to the position is acquired and output as the optimum reconstructed image BP. Therefore, the optimum reconstructed image BP corresponding to the depth position of the cell 12 in the local region LA can be obtained for each local region LA.
- the whole image generation unit 56 generates the whole image WP by arranging the optimum reconstructed image BP in the reference image for each local area LA.
- the whole image generation unit 56 uses the original image OP as the reference image.
- the whole image generation unit 56 stores the generated whole image WP in the storage device 41.
- FIG. 18 shows an example of the whole image generation processing by the whole image generation unit 56.
- the whole image generation unit 56 acquires the optimum reconstructed image BP and the original image OP from the storage device 41, and arranges the optimum reconstructed image BP in the corresponding local region LA in the original image OP. By (that is, replacing the image in the local region LA), the whole image WP is generated.
- the display control unit 57 displays the entire image WP stored in the storage device 41 on the display 5.
- the user places the culture vessel 13 on the stage 21 and then operates the input device 8 to give an instruction to start imaging.
- the image pickup control unit 50 in the information processing apparatus 10 determines whether or not an image pickup start instruction has been given (step S30), and if it is determined that an image pickup start instruction has been given, causes the image pickup device 11 to perform an image pickup operation (step). S31).
- the image pickup apparatus 11 inputs the original image OP obtained by imaging into the information processing apparatus 10.
- Step S32 includes the reconstruction process S1 shown in FIG. 14 and the in-focus position detection process S2 shown in FIG.
- the optimally reconstructed image output unit 55 outputs the reconstructed image RP corresponding to the in-focus position for each local region LA as the optimal reconstructed image BP (step S33).
- the whole image generation unit 56 generates the whole image WP using the original image OP and the optimum reconstructed image BP (step S34).
- the whole image WP generated by the whole image generation unit 56 is displayed on the display 5 by the display control unit 57.
- the reconstruction process and the in-focus position detection process are performed on the local region LA including the interference fringe image 33 in the original image OP, so that the in-focus position search efficiency is improved.
- the local area information acquisition unit 52 acquires the local area information 52A by performing image analysis, image recognition processing, or the like on the original image OP.
- the local area information acquisition unit 52 acquires the local area information 52A based on the user's setting operation using the input device 8.
- FIG. 20 shows the local area information acquisition process according to the first modification.
- the original image OP is displayed on the display 5.
- the display 5 displays a cursor 7A that moves in response to an operation of the mouse 7 (see FIG. 1) included in the input device 8.
- the user can set the local region LA so as to include the interference fringe image 33 in the original image OP.
- the user sets a local region LA for each of the interference fringe images 33 in the original image OP.
- the local area information acquisition unit 52 acquires the information representing the local area LA set by using the input device 8 as the local area information 52A, and inputs the information to the reconstructed image generation unit 53.
- the processing of the reconstructed image generation unit 53 and the like are the same as those in the above embodiment.
- the reconstructed image generation unit 53 generates the reconstructed image RP while changing the reconstructed position P from the initial position Pi, and when the in-focus position is detected by the in-focus position detection unit 54, the reconstructed image RP is regenerated.
- the reconfiguration process is completed by stopping the change of the configuration position P.
- the reconstructed image generation unit 53 does not stop the change of the reconstructed position P when the in-focus position is detected by the in-focus position detection unit 54, and the reconstructed image generation unit 53 does not stop the change of the reconstructed position.
- the reconstruction process is performed until P reaches the final position Pf from the initial position Pi. Therefore, in this modification, when the in-focus position detection unit 54 detects the in-focus position, the above-mentioned stop instruction 54A is not transmitted.
- FIG. 21 shows the reconstruction process S1A according to the second modification.
- the reconstruction process S1A according to this modification is the reconstruction process S1 shown in FIG. 14 in which the step S15 for determining the presence / absence of a stop instruction is performed to determine whether or not the reconstruction position P has reached the final position Pf. The only difference is the change to step S40.
- the steps representing the same processing contents as those in FIG. 14 are designated by the same reference numerals.
- the reconstructed image generation unit 53 outputs the reconstructed image RP in step S14, and then determines whether or not the reconstructed position P is the final position Pf (step S40).
- the reconstruction image generation unit 53 determines that the reconstruction position P is not the final position Pf (step S40: NO)
- the process shifts to step S16.
- the reconstruction image generation unit 53 determines that the reconstruction position P is the final position Pf (step S40: YES)
- the process shifts to step S17.
- FIG. 22 shows the in-focus position detection process S2A according to the second modification.
- the in-focus position detection process S2A according to this modification is the in-focus position detection process S2 shown in FIG. The only difference is that it is changed to step S50 for determining.
- the steps representing the same processing contents as those in FIG. 15 are designated by the same reference numerals.
- the in-focus position detection unit 54 outputs the in-focus position information 54B in step S23, and then determines whether or not the reconstructed position P is the final position Pf (step S50).
- the focusing position detection unit 54 determines that the reconstruction position P is not the final position Pf (step S50: NO)
- the process shifts to step S20.
- the focusing position detection unit 54 determines that the reconstruction position P is the final position Pf (step S50: YES)
- the process is terminated.
- the in-focus position detection unit 54 may use the determination result by the reconstructed image generation unit 53 without making the determination regarding the final position Pf by itself.
- FIG. 23 shows the search process of the in-focus position according to the second modification.
- the reconstruction position P is changed from the initial position Pi to the final position Pf regardless of whether or not the focusing position is detected. Therefore, the focusing position Pm which is the reconstruction position P where the sharpness is maximized. May be detected more than once.
- FIG. 23 shows an example in which two focusing positions Pm are detected. For example, when two cells 12 overlap in the depth direction, two focusing positions Pm are detected (see FIG. 24). As described above, in this modification, a plurality of in-focus positions Pm may be detected for one local region LA.
- the optimum reconstruction image output unit 55 outputs a plurality of optimum reconstruction image BPs for one local region LA. ..
- the whole image generation unit 56 may generate the whole image WP by using each of the plurality of optimum reconstructed image BPs, for example.
- FIG. 24 shows an example in which two cells 12 overlap in the depth direction (Z direction) in the culture vessel 13.
- FIG. 24A is a cross-sectional view of the culture vessel 13 cut along a plane parallel to the Z direction.
- FIG. 24B is a plan view of the culture vessel 13 as viewed from the Z direction.
- the optimum reconstruction image BP corresponding to each cell 12 is performed. Can be generated.
- this modification is not limited to the culture vessel 13 as shown in FIG. 24, and is also effective when the microchannel having a layered structure in which a plurality of microchannels used for cell culture are laminated is targeted for imaging. ..
- the optimum reconstructed image BP corresponding to the cells flowing in each microchannel can be generated.
- the local region LA is set so as to include the interference fringe image 33 in the original image OP.
- each divided region formed by dividing the original image OP is referred to as a local region LA.
- FIG. 25 shows the local region LA according to the third modification.
- the reconstruction processing and the focusing region detection processing similar to those of the above embodiment or the second modification are performed for each local region LA. Will be done.
- the size of the local area LA may be determined according to the size of the assumed object to be observed. For example, the smaller the size of the assumed observation target object, the smaller the size of the local region LA. Further, when the local area LA is small, the number of local area LAs becomes large, the reconstruction process and the in-focus area detection process take time, and the processing load of the CPU 40 or the like increases. The size of the local region LA may be determined accordingly.
- the whole image generation unit 56 replaces all the local area LAs with the optimum reconstructed image BP corresponding to each local area LA without using the reference image such as the original image OP, so that the whole image WP Can be generated.
- This modification is particularly effective when a large number of observation target objects are reflected in the original image OP and it is difficult to individually set a local region LA for each observation target object.
- the phase distribution image ⁇ 0 (m, n) obtained by the equation (3) is used as the reconstructed image RP, but the present invention is not limited to this, and the intensity distribution image A 0 (m, n) obtained by the equation (2) is not limited to this.
- the object to be observed has a thickness such as a cell population (so-called colony)
- an image appears in the intensity distribution , so it is preferable to use the intensity distribution image A0 (m, n) as the reconstructed image RP.
- the input device 8 may allow the user to select which of the phase distribution image ⁇ 0 (m, n) and the intensity distribution image A 0 (m, n) is used as the reconstructed image RP. As a result, the user can select the optimum reconstructed image RP according to the object to be observed.
- the imaging condition 11A includes the wavelength ⁇ of the irradiation light 23, but the imaging condition 11A may include the position of the observation target object in the Z direction.
- the digital holography system 2 relates to a technique called lens-free imaging, in which the image pickup apparatus 11 is not provided with an optical lens.
- the technique of the present disclosure is not limited to lens-free imaging, and can be applied to digital holography in general (for example, when reference light is used).
- the hardware configuration of the computer constituting the information processing device 10 can be modified in various ways.
- the information processing apparatus 10 can be configured by a plurality of computers separated as hardware for the purpose of improving processing capacity and reliability.
- the hardware configuration of the computer of the information processing apparatus 10 can be appropriately changed according to the required performance such as processing capacity, safety, and reliability. Further, not only the hardware but also the application program such as the operation program 41A can be duplicated for the purpose of ensuring safety and reliability, or can be distributed and stored in a plurality of storage devices. ..
- the image pickup control unit 50 the original image acquisition unit 51, the local area information acquisition unit 52, the reconstructed image generation unit 53, the in-focus position detection unit 54, the optimum reconstructed image output unit 55, and the entire image generation.
- various processors processors shown below can be used.
- the CPU 40 which is a general-purpose processor that executes software (operation program 41A) and functions as various processing units, after manufacturing an FPGA (Field Programmable Gate Array) or the like.
- Dedicated processor with a circuit configuration designed exclusively for executing specific processing such as programmable logic device (PLD), ASIC (Application Specific Integrated Circuit), which is a processor whose circuit configuration can be changed. Includes electrical circuits and the like.
- One processing unit may be composed of one of these various processors, or may be a combination of two or more processors of the same type or different types (for example, a combination of a plurality of FPGAs and / or a CPU). It may be configured in combination with FPGA). Further, a plurality of processing units may be configured by one processor.
- one processor is configured by a combination of one or more CPUs and software, as represented by a computer such as a client and a server.
- the processor functions as a plurality of processing units.
- SoC System On Chip
- the various processing units are configured by using one or more of the above-mentioned various processors as a hardware-like structure.
- an electric circuit in which circuit elements such as semiconductor elements are combined can be used.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Quality & Reliability (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Optics & Photonics (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Holo Graphy (AREA)
- Studio Devices (AREA)
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21827861.2A EP4175282B1 (en) | 2020-06-25 | 2021-05-24 | Information processing device, operation method for same, and operation program for same |
| JP2022532427A JP7364796B2 (ja) | 2020-06-25 | 2021-05-24 | 情報処理装置、その作動方法及び作動プログラム |
| US18/068,874 US20230121438A1 (en) | 2020-06-25 | 2022-12-20 | Information processing device, and operation method and operation program thereof |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020109802 | 2020-06-25 | ||
| JP2020-109802 | 2020-06-25 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/068,874 Continuation US20230121438A1 (en) | 2020-06-25 | 2022-12-20 | Information processing device, and operation method and operation program thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021261150A1 true WO2021261150A1 (ja) | 2021-12-30 |
Family
ID=79282537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/019680 Ceased WO2021261150A1 (ja) | 2020-06-25 | 2021-05-24 | 情報処理装置、その作動方法及び作動プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230121438A1 (https=) |
| EP (1) | EP4175282B1 (https=) |
| JP (1) | JP7364796B2 (https=) |
| WO (1) | WO2021261150A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024171582A1 (ja) * | 2023-02-17 | 2024-08-22 | 浜松ホトニクス株式会社 | 観察装置および観察方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170168285A1 (en) * | 2015-12-14 | 2017-06-15 | The Regents Of The University Of California | Systems and methods for image reconstruction |
| JP2017168602A (ja) | 2016-03-15 | 2017-09-21 | 富士電機株式会社 | 半導体装置および半導体装置の製造方法 |
| WO2018158810A1 (ja) * | 2017-02-28 | 2018-09-07 | 株式会社島津製作所 | 細胞観察装置 |
| WO2019180810A1 (ja) * | 2018-03-20 | 2019-09-26 | 株式会社島津製作所 | 細胞観察装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101349540B (zh) * | 2007-07-18 | 2011-06-29 | 财团法人工业技术研究院 | 影像调整方法及影像撷取装置 |
-
2021
- 2021-05-24 EP EP21827861.2A patent/EP4175282B1/en active Active
- 2021-05-24 JP JP2022532427A patent/JP7364796B2/ja active Active
- 2021-05-24 WO PCT/JP2021/019680 patent/WO2021261150A1/ja not_active Ceased
-
2022
- 2022-12-20 US US18/068,874 patent/US20230121438A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170168285A1 (en) * | 2015-12-14 | 2017-06-15 | The Regents Of The University Of California | Systems and methods for image reconstruction |
| JP2017168602A (ja) | 2016-03-15 | 2017-09-21 | 富士電機株式会社 | 半導体装置および半導体装置の製造方法 |
| WO2018158810A1 (ja) * | 2017-02-28 | 2018-09-07 | 株式会社島津製作所 | 細胞観察装置 |
| WO2019180810A1 (ja) * | 2018-03-20 | 2019-09-26 | 株式会社島津製作所 | 細胞観察装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4175282A4 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024171582A1 (ja) * | 2023-02-17 | 2024-08-22 | 浜松ホトニクス株式会社 | 観察装置および観察方法 |
| JP2024117323A (ja) * | 2023-02-17 | 2024-08-29 | 浜松ホトニクス株式会社 | 観察装置および観察方法 |
| JP7554859B2 (ja) | 2023-02-17 | 2024-09-20 | 浜松ホトニクス株式会社 | 観察装置および観察方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7364796B2 (ja) | 2023-10-18 |
| EP4175282A1 (en) | 2023-05-03 |
| EP4175282B1 (en) | 2025-12-10 |
| EP4175282A4 (en) | 2023-11-22 |
| US20230121438A1 (en) | 2023-04-20 |
| JPWO2021261150A1 (https=) | 2021-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6490219B2 (ja) | デジタルホログラフィにおけるオートフォーカスシステムおよびオートフォーカス方法 | |
| US8988520B2 (en) | Method and apparatus for improving depth of field (DOF) in microscopy | |
| US11378521B2 (en) | Optical condition determination system and optical condition determination method | |
| CN105335950A (zh) | 图像处理方法和图像处理装置 | |
| US10330913B2 (en) | Method and device for imaging an object | |
| Lu et al. | Invalid phase values removal method for absolute phase recovery | |
| Weng et al. | Integration of robust filters and phase unwrapping algorithms for image reconstruction of objects containing height discontinuities | |
| JP7397196B2 (ja) | 情報処理装置、その作動方法及び作動プログラム | |
| JP7364796B2 (ja) | 情報処理装置、その作動方法及び作動プログラム | |
| Tang et al. | Autofocusing and image fusion for multi-focus plankton imaging by digital holographic microscopy | |
| JP7404533B2 (ja) | 撮像システム及び撮像装置 | |
| Glaser et al. | RadioGAN–Translations between different radio surveys with generative adversarial networks | |
| Xu et al. | Numerical and experimental study of partial coherence for near-field and far-field ptychography | |
| TWI862591B (zh) | 半導體檢查裝置及半導體檢查方法 | |
| KR102924417B1 (ko) | 편광 조명을 이용한 단일 영상 기반 퓨리에 타이코그래피 이미징 장치 및 방법 | |
| Liu et al. | End-to-end physics-informed multi-branch GAN for enhanced DoFP polarization image reconstruction | |
| CN113936197B (zh) | 一种基于视觉显著性对图像进行目标检测的方法和系统 | |
| WO2011138882A1 (ja) | テンプレートマッチング処理装置およびテンプレートマッチング処理プログラム | |
| Hu et al. | Multi-slice ptychographic imaging with multistage coarse-to-fine reconstruction | |
| JP2023090091A (ja) | 波面計測装置及び波面計測方法 | |
| CN114485457B (zh) | 基于二值正交光栅的深度信息检测系统及方法 | |
| WO2020059642A1 (ja) | 観察装置、観察方法及び観察システム | |
| CN119002212B (zh) | 一种基于区域分割和二分法的数字全息聚焦方法和系统 | |
| JP7604972B2 (ja) | 検査装置、検査システムおよびプログラム | |
| Chen et al. | Reconstruction method based on the Hilbert fractal curve recovery sequence in a Fourier ptychography microscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21827861 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022532427 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021827861 Country of ref document: EP Effective date: 20230125 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 2021827861 Country of ref document: EP |