WO2021251277A1 - 移動距離算出方法 - Google Patents
移動距離算出方法 Download PDFInfo
- Publication number
- WO2021251277A1 WO2021251277A1 PCT/JP2021/021265 JP2021021265W WO2021251277A1 WO 2021251277 A1 WO2021251277 A1 WO 2021251277A1 JP 2021021265 W JP2021021265 W JP 2021021265W WO 2021251277 A1 WO2021251277 A1 WO 2021251277A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- distance
- speed
- acceleration
- correction
- information terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H31/00—Artificial respiration by a force applied to the chest; Heart stimulation, e.g. heart massage
- A61H31/004—Heart stimulation
- A61H31/005—Heart stimulation with feedback for the user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0048—Detecting, measuring or recording by applying mechanical forces or stimuli
- A61B5/0053—Detecting, measuring or recording by applying mechanical forces or stimuli by applying pressure, e.g. compression, indentation, palpation, grasping, gauging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
- A61B5/1122—Determining geometric values, e.g. centre of rotation or angular range of movement of movement trajectories
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H31/00—Artificial respiration by a force applied to the chest; Heart stimulation, e.g. heart massage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2505/00—Evaluating, monitoring or diagnosing in the context of a particular type of medical care
- A61B2505/01—Emergency care
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1126—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb using a particular sensing technique
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5084—Acceleration sensors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a three-dimensional [3D] space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
Definitions
- the present invention relates to a method for calculating the distance traveled, and is suitable for application to, for example, in the cardioPulmonary Resuscitation (CPR) method, in which an appropriate compression depth or the like is guided by an information processing device such as a smartphone when performing chest compressions. It is a thing.
- CPR cardioPulmonary Resuscitation
- Non-Patent Document 1 regarding cardiopulmonary resuscitation, the one-month survival rate of patients with cardiopulmonary resuscitation decreases sharply after 10 minutes after cardiopulmonary resuscitation, and chest compressions alone occur. It has been reported that when performing cardiopulmonary resuscitation, the physical limit is reached in 5 to 6 minutes.
- the treatment start time and appropriate treatment have a great influence on the survival rate of patients with cardiopulmonary arrest.
- a patient's cardiopulmonary arrest occurs, it is very important to ensure blood circulation without delay by a cardiac massage that repeatedly compresses the patient's chest before medical treatment with an AED (Automated External Defibrillator). It is also said that this cardiac massage determines the survival rate of the patient.
- AED Automatic External Defibrillator
- Non-Patent Document 2 when performing cardiac massage for an adult cardiopulmonary arrest patient, the compression depth, which is the moving distance of the body surface when compressing the chest, should be within the range of 5 to 6 [cm]. It is explained that the frequency (tempo) should be within the range of 100 to 120 times / minute.
- the general public who are non-medical personnel, often do not have the knowledge to properly perform cardiac massage for cardiopulmonary resuscitation.
- CPR meters are only allowed to be used by healthcare professionals and trained people, and because of their high price, they are installed in very limited places such as alongside AEDs. Therefore, it is difficult for the general public to use it widely.
- a heart massage is repeatedly performed with a smartphone executing a predetermined application program sandwiched between the patient's chest and the rescuer's hand.
- the smartphone calculates the movement distance by performing arithmetic processing such as integration based on the acceleration value obtained from the acceleration sensor, and also calculates the period from the interval between the appearing peaks, and this movement distance and period. Notify the rescuer of information about such things. This allows the smartphone to guide the rescuer to perform cardiac massage at the appropriate compression depth and cycle.
- the accelerometer mounted on the smartphone will detect the acceleration including the gravitational acceleration. Then, for example, the accuracy of the calculated movement distance of the smartphone is significantly reduced, and when the acceleration caused by the movement by the cardiac massage is smaller than the gravitational acceleration, the peak does not appear in the movement distance and the cycle detection accuracy is also improved. There was a risk of problems such as deterioration.
- the present invention has been made in consideration of the above points, and an object of the present invention is to propose a moving distance calculation method capable of calculating a moving distance with high accuracy based on the acceleration obtained from an acceleration sensor.
- an acquisition step of acquiring acceleration from an acceleration sensor when a plurality of reciprocating movements are performed, and a gravity correction value corresponding to gravity acceleration are used.
- a gravity correction step that performs gravity correction processing on acceleration a first integration step that performs integration processing on acceleration that has undergone gravity correction processing to calculate speed, and a first integration process that performs integration processing on speed to calculate distance.
- Two integration steps and feature points corresponding to the start point and end point of the outward trip in the round-trip movement are extracted from the distance, respectively, and based on the difference value of the distance between the start point and the end point, the outward trip in the round-trip movement
- a movement distance calculation step for calculating the movement distance is provided.
- the movement of the information processing system having the first information processing device attached to the arm of the user and the second information processing device for communication connection with the first information processing device. It is a distance calculation method, and uses an acquisition step to acquire acceleration from an acceleration sensor when multiple reciprocating movements are performed by the first information processing device, and a gravity correction value corresponding to gravity acceleration, with respect to acceleration.
- a gravity correction step that performs gravity correction processing
- a first integration step that performs integration processing on acceleration that has undergone gravity correction processing to calculate speed
- a second integration that performs integration processing on speed to calculate distance.
- the feature points corresponding to the start point and the end point of the outward trip in the round-trip movement are extracted, respectively, and the movement distance of the outward trip in the round-trip movement is based on the difference value of the distance between the start point and the end point.
- a moving distance calculation step for calculating the above is provided, and a transmission step for transmitting the acceleration, speed, distance or moving distance from the first information processing apparatus to the second information processing apparatus is further provided.
- the present invention by performing gravity correction processing on acceleration, a component corresponding to gravity can be removed from the acceleration. Thereby, the present invention can make a change corresponding to the reciprocating movement appear in the speed obtained by integrating the acceleration and the distance obtained by further integrating the acceleration without being buried in the component corresponding to the gravitational acceleration. And the travel distance can be calculated appropriately.
- the present invention it is possible to realize a moving distance calculation method capable of calculating a moving distance with high accuracy based on the acceleration obtained from the acceleration sensor.
- the mobile information terminal 1 is, for example, a smartphone, in which various parts are incorporated in a housing 2 formed in a flat rectangular parallelepiped shape and in front of the housing 2.
- the touch panel 3 is incorporated.
- the mobile information terminal 1 also incorporates a speaker 4 that emits sound, a microphone 5 that converts sound into an electric signal, and the like.
- the portable information terminal 1 is a so-called information processing device, and inside the portable information terminal 1, a control unit 11, a storage unit 12, a communication unit 13, and a timekeeping unit 14 via a bus 10, as shown in FIG. 2 in a schematic circuit configuration. ,
- the operation unit 15, the display unit 16, the voice conversion processing unit 17, the acceleration sensor 18, and the like are connected.
- the control unit 11 has a CPU (Central Processing Unit) 21, a ROM (Read Only Memory) 22, a RAM (Random Access Memory) 23, and the like.
- the CPU 21 reads various programs such as an operating system and various applications from the ROM 22 and the storage unit 12, and executes the CPU 21 while using the RAM 23 as a work area.
- the control unit 11 executes various processes and controls the mobile information terminal 1 in an integrated manner.
- the storage unit 12 is, for example, a flash memory and stores various programs, data, and the like.
- the communication unit 13 establishes a communication connection with a base station (not shown) in accordance with a mobile communication standard called, for example, 4G (4th Generation) or 5G (5th Generation), and transmits / receives various information.
- the communication unit 13 is also a wireless LAN interface compliant with standards such as IEEE (Institute of Electrical and Electronics Engineers) 802.11a / b / g / n / ac, and is referred to as a base station (also referred to as a master unit) (not shown). Send and receive various information between.
- the timekeeping unit 14 measures the time.
- the operation unit 15 is a touch sensor that is a part of the touch panel 3, detects contact with a user's fingertip or the like, and supplies information about the position or the like to the control unit 11 as an operation input of the user.
- the display unit 16 is a liquid crystal display panel that is a part of the touch panel 3, and displays various screens including various characters, figures, and the like based on the control of the control unit 11. Incidentally, the display unit 16 displays and updates the screen at a frame rate of, for example, 30 frames per second.
- the voice conversion processing unit 17 is a part that performs mutual conversion processing between voice data and voice signals and various processing related to voice signals or voice data, and is connected to the speaker 4 and the microphone 5 described above.
- the voice conversion processing unit 17 converts the voice data supplied from the control unit 11 into a voice signal and supplies the voice data to the speaker 4, so that the voice is emitted from the speaker 4.
- the voice conversion processing unit 17 converts the voice signal generated by collecting the surrounding voice by the microphone 5 into voice data, and supplies this to the control unit 11.
- the acceleration sensor 18 detects acceleration and generates and outputs a detection signal having a voltage corresponding to the magnitude of the acceleration. That is, the acceleration sensor 18 outputs the acceleration as an analog value.
- the velocity can be obtained by integrating the acceleration, and the distance traveled can be obtained by integrating this velocity.
- a gravitational acceleration of about 1 G (about 9.8 [m / s 2 ]) has already been applied to the accelerometer. Therefore, the acceleration detected by this acceleration sensor includes a component due to gravity as noise of a DC component.
- the acceleration obtained by the acceleration sensor 18 of the mobile information terminal 1 is represented as a graph when cardiopulmonary resuscitation is performed, as shown in FIG. 3A, it is about -9.8 [m / s 2 ], that is, -1G.
- the waveform fluctuates around the vicinity. Since this acceleration contains a component of gravitational acceleration, it is centered around -1G, not near 0.
- the acceleration shown in FIG. 3A is a value obtained when the chest of the doll prepared for the training of cardiopulmonary resuscitation is repeatedly pressed by a special jig (not shown). Is. Unless otherwise specified, the subsequent waveforms also represent the acceleration obtained when the doll's chest is repeatedly pressed by this jig, and various values obtained based on the acceleration. Further, in FIG. 3A, according to the contents described in Non-Patent Document 2, the compression distance (that is, the compression depth) is 55 [mm], and the frequency is 110 times per minute, that is, 110 [rpm]. This is the waveform when the compression operation is repeated.
- the acceleration is obtained by integrating the acceleration.
- the speed and the distance obtained by further integrating the speed have waveforms as shown in FIGS. 3B and 3C, for example.
- the calculated speed and distance hardly show the feature of periodically changing according to the reciprocating movement in the vertical direction accompanying the compression operation.
- the start point and the end point of the outward path in the reciprocating motion cannot be appropriately detected from the waveform shown in FIG. 3C, and it is extremely difficult to calculate the compression depth and the period.
- the velocity value and the moving distance are calculated after removing the components caused by the gravitational acceleration.
- the storage unit 12 instructs the control unit 11 to start a predetermined cardiopulmonary resuscitation program ( (Not shown) is read as an application program and executed.
- control unit 11 when the control unit 11 starts the cardiopulmonary resuscitation program, it performs a predetermined initialization process, preparation process, and the like, and then reads and executes the travel distance calculation program as a subroutine. As shown in FIG. 4, the control unit 11 forms a plurality of functional blocks such as an acceleration acquisition unit 31, a gravity correction processing unit 32, an integration processing unit 33, a feature point extraction unit 34, and a moving distance calculation unit 35. do.
- the acceleration acquisition unit 31 acquires the acceleration value from the acceleration sensor 18. At this time, the acceleration acquisition unit 31 converts the analog value output from the acceleration sensor 18 into a digital value by a predetermined A / D (Analog / Digital) converter (not shown), thereby accelerating the digital. To get.
- the gravity correction processing unit 32 removes the component of the gravitational acceleration by correcting the acceleration value.
- the integration processing unit 33 calculates the velocity value by performing the first integration processing on the acceleration value, and further calculates the distance by performing the second integration processing.
- the feature point extraction unit 34 extracts a point (hereinafter referred to as a feature point) representing a value having a feature such as a maximum value or a minimum value (hereinafter referred to as a feature value) from the waveform of the distance.
- the moving distance calculation unit 35 calculates the moving distance in one compression operation based on the feature value.
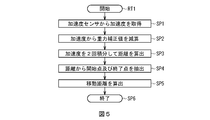
- control unit 11 When the control unit 11 forms these functional blocks, it starts the moving distance calculation processing procedure RT1 shown in FIG. 5 and moves to the first step SP1.
- control unit 11 converts the analog acceleration obtained from the acceleration sensor 18 into a digital acceleration by a predetermined A / D converter (not shown) by the acceleration acquisition unit 31 (FIG. 4). Acquire and move to the next step SP2.
- the acceleration obtained from the acceleration sensor 18 does not include gravitational acceleration, various noises, or the like, the acceleration is applied in a situation where the portable information terminal 1 is placed on the patient's chest and the compression operation is repeated. Will draw a waveform that fluctuates positively and negatively with each compression operation cycle centered on approximately 0 [m / s 2].
- the actual acceleration includes components such as gravitational acceleration and various noises (hereinafter referred to as drift components), as shown in FIG. 6A similar to FIG. 3A, 0 [m / s]. The value deviates from 2], specifically, it fluctuates around -9.8 [m / s 2].
- the A / D converter converts the analog acceleration into a digital acceleration at a predetermined sampling frequency (for example, 200 [Hz]). That is, the converted digital acceleration is a value for each predetermined sampling period (for example, 1/200 [s]).
- step SP2 the control unit 11 subtracts the gravity correction value from the acceleration as the gravity correction processing by the gravity correction processing unit 32 (FIG. 4), and moves to the next step SP3.
- This gravity correction value is a standard gravity acceleration value (9.80665 [m / s 2 ], so-called 1G), and is stored in the storage unit 12 in advance. Therefore, the control unit 11 can substantially remove the component of the gravitational acceleration included in the acceleration by subtracting the gravity correction value from the acceleration. As a result, the corrected acceleration becomes a waveform that fluctuates positively and negatively around 0 [m / s 2 ], for example, as shown in FIG. 6B.
- step SP3 the control unit 11 calculates the velocity by first performing an integral process (first time) on the acceleration by the integral process unit 33 (FIG. 4).
- first time an integral process
- FIG. 6C the velocity obtained at this time has a waveform that fluctuates substantially periodically from the vicinity of 10 [m / s] to the vicinity of 20 [m / s].
- the control unit 11 calculates the distance by performing the integration processing (second time) on the speed by the integration processing unit 33, and moves to the next step SP4.
- the distance obtained at this time has a waveform that fluctuates substantially periodically from the vicinity of 0 [mm] to the vicinity of ⁇ 55 [mm].
- step SP4 the control unit 11 identifies the start point and the end point of the immediately preceding compression operation by extracting the feature points representing the feature values in the distance waveform by the feature point extraction unit 34 (FIG. 4).
- the next step is SP5. Specifically, the feature point extraction unit 34 extracts the feature point that appeared as the minimum value at the end and uses it as the end point, and extracts the feature point that appears as the maximum value immediately before that and uses it as the start point. After storing the timing in the storage unit 12, the process proceeds to the next step SP5.
- the feature point extraction unit 34 minimizes the distance at the time when the value of the distance changes from decreasing to increasing with the passage of time, in other words, when the sign of the velocity obtained by differentiating the distance with time changes from negative to positive. Consider it as a point. Further, the feature point extraction unit 34 sets the maximum point at the time when the value of the distance changes from increasing to decreasing with the passage of time, in other words, when the sign of the velocity obtained by differentiating the distance with time changes from positive to negative. Consider it as.
- the feature point extraction unit 34 uses the point P1A, which is the minimum value that appeared last, as the end point, and the point P1B, which is the maximum value that appears immediately before that, as the end point. Is the starting point.
- step SP5 the control unit 11 calculates the movement distance from the start point to the end point by calculating the difference value of the distance between the start point and the end point by the movement distance calculation unit 35 (FIG. 4). do. After that, the control unit 11 moves to the next step SP6 and ends the moving distance calculation processing procedure RT1.
- control unit 11 can also calculate a cycle, which is the time required for one compression operation, based on the time difference between the start point extracted last and the start point extracted immediately before that. After that, the control unit 11 returns to the original cardiopulmonary resuscitation program and notifies the rescuer by displaying the travel distance as the compression depth on the display unit 16 (FIG. 2) together with the cycle.
- a cycle which is the time required for one compression operation
- the mobile information terminal 1 performs a gravity correction process of subtracting a gravity correction value from the acceleration acquired from the acceleration sensor 18 in the movement distance calculation program executed as a subroutine of the cardiopulmonary resuscitation program. And remove the component of gravitational acceleration. After that, the mobile information terminal 1 calculates the distance by performing integral processing twice for this acceleration, calculates the moving distance by extracting the start point and the end point, and performs the compression operation immediately before this. The compression depth in.
- the mobile information terminal 1 can calculate an accurate moving distance based on the acceleration obtained from the built-in acceleration sensor 18. As a result, the mobile information terminal 1 displays this moving distance as the compression depth on the display unit 16, so that the rescuer performing the cardiac massage can recognize the compression depth in the immediately preceding compression motion as a numerical value, which is appropriate. It can be modified to the compression depth.
- the mobile information terminal 1 is installed only in a limited place as described above by using the value of the acceleration obtained from the acceleration sensor 18 built in the widely used smartphone. It can realize the same function as the non-CPR meter.
- the mobile information terminal 1 can support the rescuer performing the cardiac massage to obtain the optimum chest compression depth and cycle (that is, compression frequency) recommended in Non-Patent Document 2.
- the mobile information terminal 1 functions as an auxiliary device for assisting cardiac massage when a general person without specialized knowledge or experience faces a patient with cardiopulmonary arrest on a daily basis, so that an appropriate cardiac massage can be performed. Is possible.
- the compression depth in each compression operation can be calculated accurately. can.
- a smartphone such as a mobile information terminal 1
- a smartphone equipped with a sensor for detecting other physical quantities for example, a barometric pressure sensor
- a barometric pressure sensor for example, a barometric pressure sensor
- the sampling frequency differs between the barometric pressure sensor and the acceleration sensor, various conversion processes and correction processes are required, which may lead to an increase in processing load and a decrease in accuracy.
- the mobile information terminal 1 has a gravity correction value (that is, a gravity correction value) stored in advance from the acceleration value obtained from the acceleration sensor 18 without using another sensor in the gravity correction process. It is corrected by subtracting the standard gravitational acceleration). Therefore, the portable information terminal 1 can satisfactorily remove the component of gravitational acceleration by an extremely simple calculation without requiring another sensor.
- a gravity correction value that is, a gravity correction value
- the portable information terminal 1 performs gravity correction processing on the acceleration acquired from the acceleration sensor 18 to remove the component of gravitational acceleration, and performs the distance by two integration processing. Calculate and calculate the moving distance from the extracted start point and end point to obtain the compression depth. As a result, the portable information terminal 1 can make the rescuer performing the cardiac massage recognize the compression depth in the immediately preceding compression operation and correct the compression depth to be appropriate.
- the mobile information terminal 201 (FIGS. 1 and 2) according to the second embodiment has a control unit 211 and storage instead of the control unit 11 and the storage unit 12 as compared with the mobile information terminal 1 according to the first embodiment. Although different in that it has a portion 212, the other points are similarly configured.
- the control unit 211 has a CPU 21, a ROM 22, a RAM 23, and the like, as in the first embodiment, and is adapted to read and execute various programs from the storage unit 212.
- the storage unit 212 stores a movement distance calculation program that is partially different from that of the first embodiment.
- the component of the gravitational acceleration is removed by subtracting the gravity correction value from the value of the acceleration obtained by the acceleration sensor 18.
- the speed and the distance can be calculated with extremely high accuracy.
- the value of gravitational acceleration fluctuates slightly depending on the date and time and place. That is, as in the mobile information terminal 1 according to the first embodiment, the component of the gravitational acceleration may not be completely removed from the acceleration obtained by the acceleration sensor 18 only by performing the gravity correction process. In this case, in the mobile information terminal 1, for example, as shown in FIG. 7, the maximum value and the minimum value do not sufficiently appear in the waveform of the distance, and there is a possibility that the travel distance cannot be calculated appropriately.
- the moving distance calculation program is partially different from that of the first embodiment, and in addition to the gravity correction process for acceleration, the tilt correction process for speed (details will be described later). To do).
- the control unit 211 of the mobile information terminal 201 internally forms a plurality of functional blocks as shown in FIG. 8 corresponding to FIG. 4 when the travel distance calculation program is read from the storage unit 212 and executed. .. Specifically, the control unit 211 forms the same acceleration acquisition unit 31, gravity correction processing unit 32, integration processing unit 33, feature point extraction unit 34, and moving distance calculation unit 35 as in the first embodiment. Therefore, the speed inclination correction unit 236 is formed.
- the speed gradient correction unit 236 is adapted to correct the inclination when the velocity waveform tends to be inclined, that is, when the velocity tends to increase or decrease with the passage of time (). Details will be described later).
- control unit 211 When the control unit 211 forms these functional blocks, it starts the movement distance calculation processing procedure RT20 shown in FIG. 5 and corresponds to FIG. 9, and moves to the first step SP201.
- steps SP201 and SP202 the control unit 211 performs the same processing as steps SP1 and SP2 of the moving distance calculation processing procedure RT1 (FIG. 5) according to the first embodiment, respectively.
- the control unit 211 subtracts the gravity correction value from the acceleration shown in FIG. 11A similar to FIG. 6A to obtain the acceleration shown in FIG. 11B similar to FIG. 6B, and then moves to the next step SP203.
- step SP203 the control unit 211 calculates the speed by performing one integration process with respect to the acceleration by the integration processing unit 33 (FIG. 8), and moves to the next step SP204.
- the velocity obtained at this time is a waveform that fluctuates substantially periodically from the vicinity of 10 [m / s] to the vicinity of 20 [m / s], as shown in FIG. 11C, which is the same as that of FIG. 6C, for example. .. Further, a maximum value and a minimum value appear periodically in the waveform of this velocity.
- step SP204 the control unit 211 performs speed inclination correction processing.
- the basic policy of the speed inclination correction processing will be described.
- the components remaining unremoved by the correction processing by the gravitational correction value are included in the underlying acceleration. May be included.
- the velocity is corrected based on the velocity difference and the time difference between the two maximum values, focusing on two consecutive times and the period of the maximum values periodically appearing in the velocity waveform.
- the speed inclination correction coefficient of was calculated, and the speed was corrected using this.
- control unit 211 starts the speed inclination correction processing procedure RT21 shown in FIG. 10 as a subroutine, and moves to step SP211.
- step SP21 the control unit 211 first extracts, from the feature points appearing in the velocity waveform (FIG. 11C), the feature points representing the most recent two consecutive maximum values by the feature point extraction unit 34 (FIG. 8). Then, the process proceeds to the next step SP212 as the start feature point and the end feature point in the order in which they appear. For convenience of explanation, these are also referred to as a speed start feature point and a speed end feature point, respectively.
- the feature point extraction unit 34 extracts the time point at which the speed changes from the increase to the decrease as the maximum value, as in the case of extracting the maximum value and the minimum value of the distance in the first embodiment. Specifically, the feature point extraction unit 34 sets the maximum value at the time when the sign of the acceleration obtained by differentiating the velocity changes from positive to negative. For example, if the current time is 3 [s] in FIG. 11C, the feature point extraction unit 34 sets the points P2A and the points P2B, which are the most recent two consecutive maximum values, as the start feature point and the end, respectively, in the order of appearance. It is a feature point.
- step SP212 the control unit 211 calculates the difference in speed and time between the start feature point and the end feature point as the speed difference and the time difference by the speed tilt correction unit 236 (FIG. 8), respectively, and in the next step SP213. Move. In step SP213, the control unit 211 calculates the speed inclination correction coefficient representing the ratio of the speed to the time by dividing the speed difference by the time difference by the speed inclination correction unit 236 (FIG. 8), and moves to the next step SP214. ..
- step SP214 the control unit 211 calculates the speed correction value for each speed in each sampling cycle from the start feature point to the end feature point by the speed gradient correction unit 236 (FIG. 8), and moves to the next step SP215. .. Specifically, the control unit 211 multiplies the elapsed time from the start feature point to each sampling cycle by the speed gradient correction coefficient to obtain the velocity correction value (hereinafter, also referred to as the velocity gradient correction value) in each sampling cycle. calculate.
- the velocity gradient correction value hereinafter, also referred to as the velocity gradient correction value
- step SP215 the control unit 211 subtracts the speed correction value for each sampling cycle from each speed between the start feature point and the end feature point by the speed gradient correction unit 236 (FIG. 8), thereby causing the speed. To correct. At this time, the speed inclination correction unit 236 also subtracts the speed at the start feature point from each speed between the start feature point and the end feature point.
- the corrected speed has the same value as the speed of the start feature point and the end feature point, and the increase or decrease of the speed due to the drift component is eliminated.
- the corrected speed is 0 [m / s] at both the start feature point and the end feature point.
- control unit 211 moves to the next step SP216, ends the speed inclination correction processing procedure RT21, returns to the step SP204 in the original movement distance calculation processing procedure RT20 (FIG. 9), and moves to the next step SP205.
- step SP205 the control unit 211 calculates the distance by performing one integration process with respect to the speed by the integration processing unit 33 (FIG. 8), and moves to the next step SP206.
- the distance obtained at this time has a waveform that fluctuates substantially periodically from the vicinity of 0 [mm] to the vicinity of ⁇ 55 [mm], for example, as shown in FIG. 12 corresponding to FIG. 6D.
- control unit 211 performs the same processing as steps SP4 and SP5 of the moving distance calculation processing procedure RT1 (FIG. 5) according to the first embodiment, respectively.
- the control unit 211 identifies the start point and the end point of the immediately preceding compression operation, respectively, and further calculates the moving distance from the start point to the end point.
- the control unit 211 moves to the next step SP208 and ends the moving distance calculation processing procedure RT20.
- the mobile information terminal 201 performs gravity correction processing on the acceleration acquired from the acceleration sensor 18 in the moving distance calculation program, and further, the speed gradient with respect to the speed obtained by integrating the acceleration. After performing the correction process, it is integrated again to calculate the distance. After that, the mobile information terminal 201 calculates the moving distance by extracting the start point and the end point from this distance, and uses this as the compression depth in the immediately preceding compression operation, as in the first embodiment.
- the mobile information terminal 201 calculates a moving distance with higher accuracy than that of the first embodiment by performing a two-step correction process based on the acceleration obtained from the built-in acceleration sensor 18. Can be done. As a result, the mobile information terminal 201 displays the movement distance as the compression depth on the display unit 16 as in the first embodiment, so that the rescuer performing the cardiac massage is compressed in the immediately preceding compression operation.
- the depth can be recognized as a numerical value and corrected so that the compression depth is appropriate.
- the mobile information terminal 201 can sufficiently remove the residual portion of the drift component that could not be completely removed by the gravity correction process similar to that of the first embodiment by the speed inclination correction process, and the first embodiment can be sufficiently removed.
- the accuracy of distance calculation can be significantly improved compared to the form.
- the mobile information terminal 201 has two consecutive maximum values appearing in the velocity waveform as a start feature point and an end feature point, and in a period of about 0.5 [s] between the two.
- the drift component remaining in the acceleration that was the basis of the drift component was regarded as constant, and it was treated as increasing or decreasing at a constant inclination angle at the velocity.
- the mobile information terminal 201 can satisfactorily correct the portion corresponding to the drift component while significantly reducing the arithmetic processing as compared with the case where the drift component is treated as a constantly fluctuating value.
- the mobile information terminal 201 which is a smartphone, can calculate a highly accurate distance by effectively removing the drift component within the range in which the arithmetic processing capability of the control unit 211 enables real-time arithmetic processing. can.
- the mobile information terminal 201 is placed on the chest of a stationary patient when the rescuer performs a compression motion, and is generally constant downward by the rescuer's hand.
- the compression operation is repeatedly performed in the cycle of the above and so as to have a substantially constant compression depth.
- the acceleration obtained from the acceleration sensor 18 originally represents a waveform that fluctuates substantially periodically, and the integrated speed is positive or negative around 0 [m / s]. It represents a waveform that fluctuates in the direction of, and the integrated distance represents a waveform that periodically reciprocates in the-direction starting from 0 [mm].
- the mobile information terminal 201 according to the second embodiment can exert the same effect as that of the first embodiment.
- the mobile information terminal 201 performs gravity correction processing on the acceleration acquired from the acceleration sensor 18, calculates the speed by integration processing, and then performs speed inclination correction processing. Further, the distance is calculated by the integration process, and the moving distance is calculated from the extracted start point and end point to obtain the compression depth.
- the portable information terminal 201 can make the rescuer performing the cardiac massage recognize the highly accurate compression depth in the immediately preceding compression operation and correct the compression depth to be appropriate.
- the mobile information terminal 301 (FIGS. 1 and 2) according to the third embodiment has a control unit 311 and storage instead of the control unit 11 and the storage unit 12 as compared with the mobile information terminal 1 according to the first embodiment. Although different in that it has a portion 312, the other points are similarly configured.
- the control unit 311 has a CPU 21, a ROM 22, a RAM 23, and the like, as in the first and second embodiments, and is adapted to read and execute various programs from the storage unit 312. However, the storage unit 312 stores a movement distance calculation program that is partially different from the first and second embodiments.
- the drift component may not be completely removed only by the correction by the gravity correction value and the speed inclination correction processing.
- the maximum value and the minimum value do not sufficiently appear in the waveform of the distance, and there is a possibility that the moving distance cannot be calculated appropriately.
- the moving distance calculation program is partially different from the second embodiment, and the correction process using the gravity correction value for acceleration and the speed inclination correction for speed are performed.
- the center correction processing for the speed (details will be described later) is performed.
- control unit 311 of the mobile information terminal 301 reads out the movement distance calculation program from the storage unit 312 and executes it, a plurality of functional blocks as shown in FIG. 14 corresponding to FIG. 8 and the like are internally formed. do. Specifically, the control unit 311 forms an acceleration acquisition unit 31, a gravity correction processing unit 32, an integration processing unit 33, a feature point extraction unit 34, and a moving distance calculation unit 35, which are the same as those in the first embodiment. In addition to forming the speed inclination correction unit 236 similar to that of the second embodiment, the center correction unit 337 is formed.
- the center correction unit 337 corrects it so as to match it with almost 0 [m / s]. (Details will be described later).
- control unit 311 When the control unit 311 forms these functional blocks, the control unit 311 starts the movement distance calculation processing procedure RT30 shown in FIG. 15 corresponding to FIG. 9 and the like, and moves to the first step SP301. In steps SP301 to SP304, the control unit 311 performs the same processing as steps SP201 to SP204 of the moving distance calculation processing procedure RT20 (FIG. 9) according to the second embodiment, and moves to the next step SP305. As a result, the control unit 311 subtracts the gravity correction value from the acceleration shown in FIG. 17A to obtain the acceleration shown in FIG. 17B, integrates the acceleration to calculate the speed shown in FIG. The speed shown in 17D is used.
- step SP305 the control unit 311 performs center correction processing.
- the velocity obtained by the processing up to step SP304 is corrected so that the intermediate value between the maximum value and the minimum value of the velocity is 0 [m / s], although the gravitational acceleration component and the drift component are satisfactorily removed. Then, it becomes possible to make the start point and the end point in the compression operation more apparent at the distance after the integration.
- control unit 311 starts the center correction processing procedure RT31 shown in FIG. 16 as a subroutine, and moves to step SP311.
- control unit 311 first extracts the latest minimum value among the feature points appearing in the velocity waveform (FIG. 17D) by the feature point extraction unit 34 (FIG. 14), stores the value, and stores the next minimum value. Move to step SP312.
- the feature point extraction unit 34 extracts the time point at which the velocity changes from decreasing to increasing as the minimum value, as in the case of extracting the minimum value of the velocity in the first embodiment. That is, the feature point extraction unit 34 sets the velocity at the time when the sign of the acceleration obtained by differentiating the velocity is switched from negative to positive as the minimum value.
- step SP312 the control unit 311 subsequently uses the feature point extraction unit 34 (FIG. 14) to extract the maximum value that appears immediately before the minimum value extracted in step SP311 among the feature points appearing in the velocity waveform (FIG. 17D). Then, the value is stored, and the process proceeds to the next step SP313.
- the feature point extraction unit 34 extracts the velocity at the time when the velocity changes from decreasing to increasing, specifically, at the time when the sign of the acceleration obtained by differentiating the velocity changes from positive to negative, as a maximum value. For example, if the current time is 3 [s] in FIG. 17D, the feature point extraction unit 34 extracts the point P3A, which is the latest minimum value, and the point P3B, which is the maximum value that appears immediately before that.
- step SP313 the control unit 311 calculates an intermediate value between the maximum value and the minimum value by the center correction unit 337 (FIG. 14), and moves to the next step SP314 with this as the center correction value.
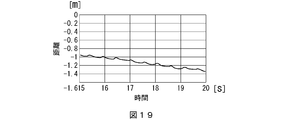
- step SP314 the control unit 311 continuously corrects the speed by subtracting the center correction value from the speed by the center correction unit 337 (FIG. 14). As a result, as shown in FIG. 18A, the center value of the velocity becomes 0 [m / s]. After that, the control unit 311 moves to the next step SP315, ends the center correction processing procedure RT31, returns to the step SP305 in the original movement distance calculation processing procedure RT30 (FIG. 15), and moves to the next step SP306.
- control unit 311 performs the same processing as in steps SP205 to SP207 of the moving distance calculation processing procedure RT20 (FIG. 9) according to the second embodiment in steps SP306 to SP308.
- the control unit 311 calculates the distance as shown in FIG. 18B, specifies the start point and the end point of the immediately preceding compression operation, respectively, and further calculates the moving distance from the start point to the end point. do.
- the control unit 311 moves to the next step SP309 and ends the moving distance calculation processing procedure RT30.
- the mobile information terminal 301 subtracts the gravity correction value from the acceleration acquired from the acceleration sensor 18 in the moving distance calculation program, and further, the speed gradient with respect to the integrated speed. Perform correction processing. Subsequently, the mobile information terminal 301 adjusts the center value of the maximum value and the minimum value to 0 [m / s] by performing the center correction process for this speed. After that, the mobile information terminal 301 calculates the moving distance by extracting the start point and the end point from this distance, and uses this as the compression depth in the immediately preceding compression operation, as in the second embodiment.
- the mobile information terminal 301 obtains a moving distance with higher accuracy than that of the first and second embodiments by undergoing a three-step correction process based on the acceleration obtained from the built-in acceleration sensor 18. Can be calculated. As a result, the mobile information terminal 301 displays the movement distance as the compression depth on the display unit 16 as in the first and second embodiments, so that the rescuer performing the cardiac massage is compressed immediately before.
- the compression depth in operation can be recognized as a numerical value and corrected so as to be an appropriate compression depth.
- the mobile information terminal 301 performs the same correction process with the gravity correction value as in the first embodiment and the same speed inclination correction process as in the second embodiment, and then sets the center value of the speed to 0 [m].
- the accuracy of specifying the start point and the end point of the compression operation can be significantly improved based on the distance obtained by integrating this.
- the mobile information terminal 301 according to the third embodiment can exert the same effects as those of the first and second embodiments.
- the mobile information terminal 301 subtracts the gravity correction value from the acceleration acquired from the acceleration sensor 18, calculates the acceleration by the integration process, and then performs the speed tilt correction process and the center. The correction process is performed, the distance is further calculated by the integral process, and the moving distance is calculated from the extracted start point and end point to obtain the compression depth.
- the mobile information terminal 301 can make the rescuer performing the cardiac massage recognize the highly accurate compression depth in the immediately preceding compression operation and correct the compression depth to be appropriate.
- the mobile information terminal 401 (FIGS. 1 and 2) according to the fourth embodiment has a control unit 411 and storage instead of the control unit 11 and the storage unit 12 as compared with the mobile information terminal 1 according to the first embodiment. Although different in that it has a portion 412, the other points are similarly configured.
- the control unit 411 has a CPU 21, a ROM 22, a RAM 23, and the like, as in the first and second embodiments, and is adapted to read and execute various programs from the storage unit 412.
- the storage unit 412 stores a movement distance calculation program that is partially different from the first, second, and third embodiments.
- the value of gravitational acceleration slightly fluctuates depending on the date and time and place. Therefore, even if the correction by the gravity correction value, the speed inclination correction processing, and the center correction processing are performed, the drift component may not be completely removed.
- the position should return to a certain position (that is, the distance) for each compression operation, but every time the compression operation is repeated, the pressure operation is repeated. The distance keeps decreasing or increasing, and the waveform is tilted. That is, at this time, the accuracy of the calculated distance is lowered in the mobile information terminal 301, and there is a possibility that the moving distance cannot be calculated appropriately.
- the moving distance calculation program is partially different from the third embodiment, and the correction process using the gravity correction value for the acceleration and the speed inclination correction for the speed are performed.
- the distance inclination correction processing (details will be described later) for the distance is performed.
- the control unit 411 of the mobile information terminal 401 reads out the movement distance calculation program from the storage unit 412 and executes it, a plurality of functional blocks as shown in FIG. 20 corresponding to FIG. 14 and the like are internally formed. do. Specifically, the control unit 411 forms an acceleration acquisition unit 31, a gravity correction processing unit 32, an integration processing unit 33, a feature point extraction unit 34, and a moving distance calculation unit 35, which are the same as those in the first embodiment. A speed inclination correction unit 236 similar to that of the second embodiment is formed, and a center correction unit 337 similar to that of the third embodiment is further formed. In addition to this, the control unit 411 forms the distance inclination correction unit 438. The distance inclination correction unit 438 corrects the inclination when the waveform of the distance tends to be inclined due to the influence of the speed drift component, that is, when the distance increases or decreases with the passage of time. (Details will be described later).
- control unit 411 When the control unit 411 forms these functional blocks, the control unit 411 starts the movement distance calculation processing procedure RT40 shown in FIG. 21 and corresponds to FIG. 15 and the like, and moves to the first step SP401. In steps SP401 to SP406, the control unit 411 performs the same processing as steps SP301 to SP306 of the moving distance calculation processing procedure RT30 (FIG. 15) according to the third embodiment, and moves to the next step SP307.
- control unit 411 subtracts the gravity correction value from the acceleration shown in FIG. 23A to obtain the acceleration shown in FIG. 23B, and then integrates the acceleration to calculate the velocity shown in FIG. 23C. Subsequently, the control unit 411 performs speed inclination correction processing on this speed to obtain the speed shown in FIG. 23D, further performs center correction processing to obtain the speed shown in FIG. 24A, and then integrates this to obtain the distance shown in FIG. 24B. Is calculated.
- step SP407 the control unit 411 performs the distance inclination correction process.
- This distance inclination correction process corrects the distance by performing the same process as the speed inclination correction process described in the second embodiment for the distance.
- control unit 411 starts the distance inclination correction processing procedure RT41 shown in FIG. 22 as a subroutine, and moves to step SP411.
- step SP411 the control unit 411 first extracts the most recent two consecutive maximum values of the feature points appearing in the distance waveform (FIG. 24B) by the feature point extraction unit 34 (FIG. 20), and in the order of appearance. Each of them is referred to as a start feature point and an end feature point (hereinafter, each is also referred to as a distance start feature point and a distance end feature point), and the process proceeds to the next step SP412.
- the feature point extraction unit 34 is the same as the case where the maximum value of the velocity is extracted in the second embodiment, the speed at the time when the distance changes from the increase to the decrease, specifically, the code of the acceleration obtained by differentiating the velocity.
- the speed at which is switched from positive to negative is extracted as a maximum value. For example, if the current time is 3 [s] in FIG. 24B, the feature point extraction unit 34 sets the points P4A and the points P4B, which are the most recent two consecutive maximum values, as the start feature point and the end, respectively, in the order of appearance. It is a feature point.
- step SP412 the control unit 411 calculates the difference in distance and time between the start feature point and the end feature point as the distance difference and the time difference, respectively, by the distance inclination correction unit 438 (FIG. 20), and in the next step SP413.
- step SP413 the control unit 411 calculates the distance inclination correction coefficient representing the ratio of the distance to the time by dividing the distance difference by the time difference by the distance inclination correction unit 438 (FIG. 20), and moves to the next step SP414. .
- step SP414 the control unit 411 uses the distance tilt correction unit 438 (FIG. 20) to correct the distance for each distance in each sampling cycle from the start feature point to the end feature point (hereinafter, this is the tilt correction value or the distance tilt). (Also called a correction value) is calculated, and the process proceeds to the next step SP415. Specifically, the control unit 411 calculates the distance correction value in each sampling cycle by multiplying the elapsed time from the start feature point to each sampling cycle by the distance slope correction coefficient.
- step SP415 the control unit 411 subtracts the distance correction value for each sampling cycle from each distance between the start feature point and the end feature point by the distance tilt correction unit 438 (FIG. 20), thereby causing the distance. To correct. At this time, the distance inclination correction unit 438 also subtracts the distance at the start feature point from each distance between the start feature point and the end feature point.
- the corrected distance has the same value as the distance between the start feature point and the end feature point, and the increase or decrease in the distance due to the velocity drift component is eliminated. ..
- the corrected distance is 0 [m] at both the start feature point and the end feature point.
- control unit 411 moves to the next step SP416 to end the distance inclination correction processing procedure RT41, returns to the step SP407 in the original moving distance calculation processing procedure RT40 (FIG. 21), and moves to the next step SP408.
- control unit 411 performs the same processing as steps SP307 and SP308 of the moving distance calculation processing procedure RT30 (FIG. 15) according to the third embodiment in steps SP408 and SP409, respectively.
- the control unit 411 identifies the start point and the end point of the immediately preceding compression operation, respectively, based on the distance shown in FIG. 24C, and calculates the moving distance from the start point to the end point. After that, the control unit 411 moves to the next step SP410 and ends the moving distance calculation processing procedure RT40.
- the compression operation is performed by using a dedicated jig (not shown) with a compression depth of 55 [mm] and a frequency of 110 [rpm].
- the waveform of the acceleration obtained from the acceleration sensor 18 and the velocity and the distance obtained based on the acceleration are shown.
- the rescuer trains the cardiopulmonary resuscitation on the training doll instead of the jig
- the acceleration obtained from the acceleration sensor 18 and various waveforms of the velocity and the distance obtained based on the acceleration are obtained. 25 and 26, respectively, corresponding to FIGS. 23 and 24. From FIGS. 25 and 26, it can be seen that the mobile information terminal 401 can finally obtain a waveform with a good distance even in the treatment by the actual cardiopulmonary resuscitation method, and can calculate the moving distance with high accuracy.
- the mobile information terminal 401 subtracts the gravity correction value from the acceleration acquired from the acceleration sensor 18 in the moving distance calculation program, and further, the speed gradient with respect to the integrated speed. Performs correction processing and center correction processing. Subsequently, the mobile information terminal 401 removes the influence of the speed drift component by performing the distance inclination correction process on the distance obtained by integrating the speed. After that, the mobile information terminal 401 calculates the moving distance by extracting the start point and the end point from this distance, and uses this as the compression depth in the immediately preceding compression operation, as in the third embodiment.
- the mobile information terminal 401 is more accurate than the first, second, and third embodiments by undergoing four-step correction processing based on the acceleration obtained from the built-in acceleration sensor 18. A good travel distance can be calculated. As a result, the mobile information terminal 401 displays the travel distance as the compression depth on the display unit 16 as in the first, second, and third embodiments, so that the rescuer performing the cardiac massage can receive it.
- the compression depth in the immediately preceding compression operation can be recognized as a numerical value and corrected so as to be an appropriate compression depth.
- the mobile information terminal 401 sufficiently removes the speed drift component that could not be completely removed by the correction process using the gravity correction value, the speed inclination correction process, and the center correction process, which are the same as those in the third embodiment, by the distance inclination correction process. This makes it possible to significantly improve the accuracy of distance calculation as compared with the third embodiment.
- the mobile information terminal 401 uses two consecutive maximum values appearing in the distance waveform as the start feature point and the end feature point, as in the speed tilt correction process in the second embodiment. .. Then, the mobile information terminal 401 considers the velocity drift component contained in the underlying velocity to be constant in about 0.5 seconds between the two, and increases or decreases at a constant tilt angle at a distance. I tried to treat it as if it were.
- the mobile information terminal 401 corresponds to the speed drift component while significantly reducing the arithmetic processing as compared with the case where the speed drift component is treated as a constantly fluctuating value, as in the second embodiment.
- the part can be corrected well.
- the mobile information terminal 401 which is a smartphone, effectively suppresses the speed drift component within the range in which the arithmetic processing capacity of the control unit 411 enables real-time arithmetic processing, as in the second embodiment. It is possible to calculate the removed, highly accurate distance.
- the mobile information terminal 401 when the compression operation is performed by a jig based on the acceleration obtained when the rescuer performs the compression operation (FIG. 23). And FIG. 24), the degree of difference in the waveform for each compression operation is larger. Since the mobile information terminal 401 mainly performs various correction processing based on the value of the acceleration obtained in the immediately preceding compression operation, if the waveforms of each compression operation are significantly different, the correction processing can be performed satisfactorily. There is a risk that it will disappear.
- the mobile information terminal 401 finally obtains the distance (even if it is based on the acceleration obtained when the rescuer performs the compression operation).
- the waveform of FIG. 26C it returns to the vicinity of 0 [mm] for each compression operation, and the compression depth, which is the movement distance of each, can be calculated accurately. That is, even if the waveform in each compression operation is slightly different depending on the rescuer, the mobile information terminal 401 is subjected to four-step correction processing based on the acceleration value in the immediately preceding compression operation, such as gravitational acceleration. Unnecessary components can be satisfactorily removed.
- the mobile information terminal 401 according to the fourth embodiment can exert the same effects as those of the first, second and third embodiments.
- the mobile information terminal 401 subtracts the gravity correction value from the acceleration acquired from the acceleration sensor 18, calculates the acceleration by the integration process, and then performs the speed tilt correction process and the center. The correction process is performed, and the distance is calculated by the integral process. Subsequently, the mobile information terminal 401 performs distance inclination correction processing on this distance, and then calculates the moving distance from the extracted start point and end point to obtain the compression depth. As a result, the portable information terminal 401 can make the rescuer performing the cardiac massage recognize the highly accurate compression depth in the immediately preceding compression operation and correct the compression depth to be appropriate.
- the mobile information terminal 501 according to the fifth embodiment has a control unit 511 and a storage unit in place of the control unit 11 and the storage unit 12 as compared with the mobile information terminal 1 according to the first embodiment. Although different in that it has a portion 512, the other points are similarly configured.
- the control unit 511 has a CPU 21, a ROM 22, a RAM 23, and the like, as in the first and second embodiments, and is adapted to read and execute various programs from the storage unit 512.
- the storage unit 512 stores a moving distance calculation program that is partially different from the first to fourth embodiments.
- the value of gravitational acceleration slightly fluctuates depending on the date and time and place. That is, in the portable information terminal 501, the value of the acceleration obtained by the acceleration sensor 18 includes a component caused by gravitational acceleration or the like, as in the case described in the second embodiment. Therefore, in the portable information terminal 501, in the stationary state before the compression operation is started, the acceleration obtained from the acceleration sensor 18 is corrected by the gravity correction value as in the first embodiment.
- the speed is calculated by performing the integration process, the speed does not become 0 [m / s], and there is a possibility of drawing a waveform that increases or decreases, for example, as shown in FIG. 27.
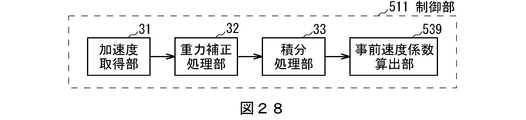
- the pre-speed coefficient calculation process in the previous stage, the pre-velocity coefficient is calculated based on the slope of the speed obtained in the stationary state before the compression operation is started.
- the mobile information terminal 501 internally forms a plurality of functional blocks as shown in FIG. 28, which corresponds to FIG. 4, when the pre-speed coefficient calculation program is read from the storage unit 512 and executed.
- the control unit 511 forms a pre-speed coefficient calculation unit 539 in addition to the acceleration acquisition unit 31, the gravity correction processing unit 32, and the integration processing unit 33, which are the same as those in the first embodiment.
- the pre-velocity coefficient calculation unit 539 has a configuration partially similar to the speed inclination correction unit 236 (FIG. 8) according to the second embodiment, and when the velocity waveform tends to be inclined, that is, the time. When the speed tends to increase or decrease with the passage of time, the pre-velocity coefficient based on this inclination is calculated (details will be described later).
- control unit 511 When the control unit 511 forms these functional blocks, the control unit 511 starts the pre-speed coefficient calculation processing procedure RT50 shown in FIG. 29 and corresponds to FIG. 9, and moves to the first step SP501.
- step SP501 the control unit 511 displays a message such as "Preparation processing is performed. Please keep the smartphone stationary for a while.” On the display unit 16 (FIG. 2), so that the rescuer can receive the mobile information terminal 501. Is urged to stand still for a while, and the next step is to move to SP502.
- control unit 511 performs the same processing as steps SP201 to SP203 of the moving distance calculation processing procedure RT20 (FIG. 9) according to the second embodiment, and moves to the next step SP505.
- step SP505 the control unit 511 uses the pre-speed coefficient calculation unit 539 to set the tilt end point 1 [s] before the current time point and the tilt start point 1 [s] before the current time based on the speed. Set and move to the next step SP506.
- step SP506 the control unit 511 calculates the difference in speed and time between the inclination start point and the inclination end point as the speed difference and the time difference by the advance speed coefficient calculation unit 539 (FIG. 26), respectively, and in the next step SP507. Move to.
- step SP507 the control unit 511 calculates the pre-speed coefficient representing the ratio of the speed to the time by dividing the speed difference by the time difference by the pre-speed coefficient calculation unit 539 (FIG. 26), and stores this in the storage unit 512. The memory is stored, and the process proceeds to the next step SP508.
- step SP508 the control unit 511 displays a message such as "The preparation process has been completed. Please start the compression operation" on the display unit 16 (FIG. 2), thereby causing the rescuer to perform the compression operation. Encourage them to start. After that, the control unit 511 moves to the next step SP509 and ends the pre-speed coefficient calculation processing procedure RT50.
- a correction processing using the pre-speed coefficient is performed by a processing similar to the moving distance calculation processing procedure RT30 (FIG. 15) according to the third embodiment, and then the center correction processing is performed. And the distance inclination correction process is performed, and the moving distance is calculated.
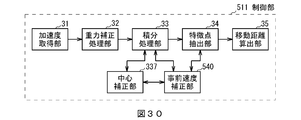
- the control unit 511 reads the movement distance calculation program from the storage unit 512 and executes it, as shown in FIG. 30 corresponding to FIG. 20, a plurality of functional blocks are formed inside. At this time, the control unit 511 is added to the acceleration acquisition unit 31, the gravity correction processing unit 32, the integration processing unit 33, the feature point extraction unit 34, the moving distance calculation unit 35, and the center correction unit 337, which are the same as those in the third embodiment. Therefore, a pre-speed correction unit 540 is formed in place of the speed inclination correction unit 236. Of these, the pre-speed correction unit 540 calculates the pre-speed correction value based on the pre-speed coefficient and the elapsed time, and corrects the speed using this.
- control unit 511 When the control unit 511 forms these functional blocks, it starts the moving distance calculation processing procedure RT51 shown in FIG. 31 and moves to step SP511.
- the control unit 511 performs the same processing as in steps SP301 to SP303 (FIG. 15) in steps SP511 to SP513, and moves to the next step SP514.
- step SP514 the control unit 511 calculates the pre-speed correction value by the pre-speed correction unit 540, and moves to the next step SP515. Specifically, the pre-speed correction unit 540 reads the pre-speed coefficient from the storage unit 512, and acquires the elapsed time since the start of the compression operation by the time measuring unit 14 (FIG. 2). Next, the pre-speed correction unit 540 calculates the pre-speed correction value by multiplying this elapsed time by the pre-speed coefficient.
- step SP515 the control unit 511 corrects the speed by subtracting the pre-speed correction value from the speed by the pre-speed correction unit 540, and moves to the next step SP516.
- the control unit 511 performs the same processing as in steps SP305 to SP308 (FIG. 15) in steps SP516 to SP519, and then moves to the next step SP520 to end the moving distance calculation processing procedure RT51.
- the mobile information terminal 501 can sufficiently remove the residual portion of the drift component that could not be completely removed by the correction process based on the gravity correction value by the pre-speed correction process, as in the third embodiment.
- the accuracy of calculating the distance can be significantly improved as compared with the first embodiment.
- the mobile information terminal 501 calculates the pre-speed coefficient before the start of the compression operation, it is possible to reduce the arithmetic processing to be performed after the start of the compression operation as compared with the third embodiment.
- the moving distance can be calculated at an appropriate timing without delay from the compression operation.
- the mobile information terminal 601 (FIGS. 1 and 2) according to the sixth embodiment has a control unit 611 and storage instead of the control unit 11 and the storage unit 12 as compared with the mobile information terminal 1 according to the first embodiment. Although different in that it has a portion 612, the other points are similarly configured.
- the control unit 611 has a CPU 21, a ROM 22, a RAM 23, and the like, as in the first embodiment, and is adapted to read and execute various programs from the storage unit 512.
- the storage unit 512 stores a moving distance calculation program that is partially different from the first to fifth embodiments.
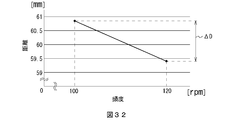
- the acceleration sensor 18 (FIG. 2) has a structure in which a predetermined sensor is suspended by a plurality of elastic bodies. Therefore, the accelerometer 18 has characteristics according to frequency (so-called frequency characteristics) in reciprocating motion.
- the compression depth is set to 60 [mm]
- the frequency is set to 100 [rpm]
- the frequency is set to 120 [rpm].
- the compression depth was calculated after performing various correction processes based on the acceleration obtained from the acceleration sensor 18 in the same manner as in the embodiment of the above. Then, as shown in FIG. 32, the distance ⁇ D (about 1.4 [mm]) between the calculated compression depth values is between the case of 100 [rpm] and the case of 120 [rpm]. There was a difference. This means that there is an error of about 1 [%] or more in each of the positive and negative directions with respect to the actual compression depth of 60 [mm].
- the compression operation is performed at a predetermined frequency for a predetermined movement distance by using a jig, and the movement distance calculated at this time and the specified movement distance are set.
- the ratio was stored as a calibration coefficient, and the same distance to be calculated in the subsequent compression operation was multiplied by this calibration coefficient for calibration.
- the term “calibration” is used here because the value calculated when the portable information terminal 601 is regarded as a "measuring device for measuring a moving distance" is accurately defined by a jig. This is because the process of correcting to match the moving distance corresponds to so-called calibration.
- the mobile information terminal 601 is configured to perform two processes such as a calibration coefficient calculation process and a calibration coefficient application process.
- the compression depth is calculated by performing a compression operation with a jig, and the calibration coefficient is calculated based on the ratio between the obtained calculation result and the actual compression depth.
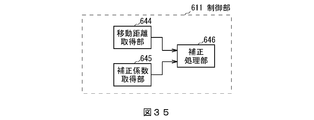
- the control unit 611 of the mobile information terminal 601 receives a predetermined operation instruction via the operation unit 15 (FIG. 2)
- the calibration coefficient calculation program is read from the storage unit 612 and executed, as shown in FIG. 33.
- a plurality of functional blocks are formed inside.
- the control unit 611 forms a correction movement distance calculation unit 641, an average calculation unit 642, and a calibration coefficient calculation unit 643.
- the corrected movement distance calculation unit 641 has all the functional blocks (FIG. 20) in the fourth embodiment, and is obtained from the acceleration sensor 18 by the same method as in the fourth embodiment.
- the distance is calculated after performing various correction processes based on the acceleration.
- the average calculation unit 642 calculates the average moving distance, which is the average value of the plurality of moving distances.
- the calibration coefficient calculation unit 643 calculates the correction coefficient based on the set compression depth and the average moving distance.
- step SP601 the control unit 611 causes the correction movement distance calculation unit 641 to perform the compression operation a plurality of times (for example, 10 times or more) by the jig, and at this time, the movement distance is calculated based on the acceleration obtained from the acceleration sensor 18. Each of them is calculated and stored in the storage unit 612, and the process proceeds to the next step SP602.
- the acceleration, speed and distance and the moving distance obtained here will also be referred to as a calibration acceleration, a calibration speed, a calibration distance and a calibration moving distance, respectively.
- the gravity correction process performed at this time is also referred to as a calibration gravity correction process.
- the predetermined compression depth value (55 [mm]) and the predetermined frequency value (110 [rpm]) are the compression depth and the compression depth described in Non-Patent Document 2. It is the median value or a value close to this in the appropriate range of frequency.
- the mobile information terminal 601 performs correction processing for the acceleration value and the speed and distance obtained by integrating the acceleration value according to the moving distance calculation processing procedure RT40 (FIG. 21) according to the fourth embodiment. After doing so, calculate the travel distance for each.
- step SP602 the control unit 611 calculates the average value of the calculated moving distances by the average calculation unit 642 to obtain the average moving distance, and moves to the next step SP603.
- the average moving distance calculated at this time is a value including a certain error with respect to the specified compression depth of 55 [mm] due to the frequency characteristic of the acceleration sensor 18.
- step SP603 the control unit 611 calculates the calibration coefficient by dividing the specified compression depth of 55 [mm] by the arithmetic mean distance by the calibration coefficient calculation unit 643, and stores this in the storage unit 612. After that, the control unit 611 moves to the next step SP604 and ends the calibration coefficient calculation processing procedure RT60.
- the control unit 611 first calculates the movement distance by executing the movement distance calculation processing procedure RT40 (FIG. 21) as a subroutine as in the fourth embodiment, and stores this movement distance in the storage unit 612.
- the control unit 611 reads the calibration coefficient application program from the storage unit 612 and executes it, as shown in FIG. 35, the control unit 611 forms a plurality of functional blocks internally. At this time, the control unit 611 forms a moving distance acquisition unit 644, a calibration coefficient acquisition unit 645, and a calibration processing unit 646. Of these, the moving distance acquisition unit 644 reads out the moving distance from the storage unit 612 and acquires it. The calibration coefficient acquisition unit 645 reads and acquires the calibration coefficient from the storage unit 612. The calibration processing unit 646 performs calibration processing for the moving distance by multiplying the moving distance by a calibration coefficient.
- step SP611 the control unit 611 reads the movement distance and the correction coefficient from the storage unit 612 by the movement distance acquisition unit 644 and the calibration coefficient acquisition unit 645, respectively, and moves to the next step SP612.
- step SP612 the control unit 611 calculates the calibrated movement distance by multiplying the movement distance by the calibration coefficient by the calibration processing unit 646, and stores this in the storage unit 612. After that, the control unit 611 moves to the next step SP613 and ends the calibration coefficient application processing procedure RT61.
- the portable information terminal 601 calculates the calibration coefficient in advance based on the acceleration obtained when the compression operation is performed using the jig, and is obtained by the acceleration sensor 18 in the subsequent actual compression operation.
- the calibration process is performed by multiplying the travel distance calculated based on the acceleration by this calibration coefficient.
- the portable information terminal 601 can calibrate the error according to the frequency characteristic of the acceleration sensor 18.
- Non-Patent Document 2 the appropriate range of the described compression depth is described as 50 [mm] to 60 [mm], and the appropriate range of frequency is described as 100 [rpm] to 120 [rpm]. Has been done.
- the mobile information terminal 601 sets the specified compression depth to 55 [mm], which is the median value of the above range, and the specified frequency is the median value of the above range in the calibration coefficient calculation process in the previous stage. It was set to 110 [rpm].
- the mobile information terminal 601 can calculate the moving distance with extremely high accuracy if the compression depth is near the center of the above range and the frequency is near the center of the range in the compression operation of the rescuer. Further, the mobile information terminal 601 should suppress the error between positive and negative to about 0.5 [%] at the maximum even if the moving distance and frequency are near the boundary value in the above range in the compression operation of the rescuer. Can be done.
- the mobile information terminal 601 when calculating the calibration coefficient, applied various correction processes similar to those in the fourth embodiment, and calculated the calculated average distance using the obtained travel distance. Therefore, the mobile information terminal 601 applies this calibration coefficient to the travel distance calculated by applying various correction processes similar to those of the fourth embodiment in the actual compression operation performed thereafter. , Extremely accurate calibration processing can be performed.
- the information processing system 700 is composed of a mobile information terminal 701 and an arm-worn information terminal 751.
- the mobile information terminal 701 as the second information processing device replaces the control unit 11, the storage unit 12, and the communication unit 13 as compared with the mobile information terminal 1 according to the first embodiment.
- the other points are similarly configured.
- the control unit 711 has a CPU 21, a ROM 22, a RAM 23, and the like, as in the first to sixth embodiments, and is adapted to read and execute various programs from the storage unit 712.
- the storage unit 712 stores a moving distance calculation program that is partially different from the first to sixth embodiments.
- the communication unit 713 conforms to mobile communication standards called 4G and 5G and wireless LAN standards such as IEEE802.11a / b / g / n / ac / ax, as in the first to sixth embodiments. Wireless communication is possible. In addition to this, the communication unit 713 can also perform wireless communication conforming to a standard such as BLE (Bluetooth (registered trademark) Low Energy).
- BLE Bluetooth (registered trademark) Low Energy
- the arm-worn information terminal 751 as the first information processing device is a so-called smart watch having a shape similar to that of a general wristwatch, as shown in FIG. 37, and is flat.
- the band 756 is attached to the housing 752 formed in a rectangular parallelepiped shape.
- Various parts are incorporated in the housing 752, a touch panel 753 is incorporated in the front surface thereof, and a speaker 754, a microphone 755, and the like are also incorporated in the housing 752.
- the arm-worn information terminal 751 is a so-called information processing device like the portable information terminal 701 and the like, and inside the arm-worn information terminal 751 via a bus 710 as shown in FIG. 38 corresponding to FIG. 2 as a schematic circuit configuration.
- a control unit 761, a storage unit 762, a communication unit 763, a timekeeping unit 764, an operation unit 765, a display unit 766, a voice conversion processing unit 767, an acceleration sensor 768, and the like are connected. That is, the arm-worn information terminal 751 has a circuit configuration similar to that of the portable information terminal 701 and the like.
- the control unit 761 is configured in the same manner as the control unit 711 (FIG. 2) of the mobile information terminal 701, and has a CPU 771, a ROM 772, a RAM 773, and the like.
- the CPU 771 reads various programs such as an operating system and various applications from the ROM 772 and the storage unit 762, and executes the CPU 773 while using the RAM 773 as a work area.
- the control unit 761 executes various processes and comprehensively controls the arm-worn information terminal 751.
- the storage unit 762 is, for example, a flash memory and stores various programs, data, and the like.
- the communication unit 763 is used for mobile communication such as 4G and 5G, and various communication standards such as wireless LAN and BLE that comply with the standards such as IEEE802.11a / b / g / n / ac / ax.
- Various information is transmitted and received wirelessly by a compliant method.
- the timekeeping unit 764, the operation unit 765, the display unit 766, the voice conversion processing unit 767, and the acceleration sensor 768 are the timekeeping unit 14, the operation unit 15, the display unit 16, the voice conversion processing unit 17, and the acceleration sensor 18 (FIG. 2), respectively. It is configured in the same way.
- the arm-worn information terminal 751 has a sufficiently small volume as compared with the mobile information terminal 701, so that the battery capacity is also sufficiently small. Therefore, the control unit 761 of the arm-worn information terminal 751 has a lower computing power than the control unit 711 of the mobile information terminal 701, thereby suppressing power consumption.
- the moving distance is calculated based on the value of the acceleration obtained by the acceleration sensor 18 of the mobile information terminal 1.
- the moving distance is calculated in the mobile information terminal 701 based on the acceleration obtained by the acceleration sensor 768 of the arm-worn information terminal 751.
- control unit 761 of the arm-worn information terminal 751 internally forms a plurality of functional blocks as shown in FIG. 39 corresponding to FIG. 4 and the like when the acceleration detection program is read from the storage unit 762 and executed. do. Further, the control unit 711 of the mobile information terminal 701 forms a plurality of functional blocks as shown in FIG. 39 inside when the moving distance calculation program is read from the storage unit 712 and executed.
- control unit 761 of the arm-mounted information terminal 751 forms the acceleration acquisition unit 31 similar to the control unit 11 and the like in the first embodiment, and also forms the data transmission unit 781. Further, the control unit 711 of the mobile information terminal 701 forms the gravity correction processing unit 32, the integration processing unit 33, the feature point extraction unit 34, and the moving distance calculation unit 35, which are the same as those in the first embodiment.
- a data receiving unit 782 and a vector synthesis processing unit 783 are formed. The specific operation of each functional block will be described later.
- step SP701 the control unit 761 performs the same processing as step SP1 of the moving distance calculation processing procedure RT1 (FIG. 5) according to the first embodiment, and moves to the next step SP702.
- the acceleration acquisition unit 31 (FIG. 39) acquires a three-dimensional analog acceleration value from the acceleration sensor 768 of the arm-mounted information terminal 751 and converts each into a digital value to obtain a three-dimensional vector (3D vector (FIG. 39).
- the digital acceleration vector represented by ⁇ X, ⁇ Y, ⁇ Z) is acquired.
- step SP702 the control unit 761 transmits the acceleration vector obtained by the acceleration acquisition unit 31 as transmission data by the data transmission unit 781 (FIG. 39) to the mobile information terminal 701 by BLE.
- the data transmission unit 781 generates transmission data by causing the communication unit 763 (FIG. 38) to perform a predetermined modulation process or the like on the acceleration vector, and causes the communication unit 763 to transmit the transmission data by BLE.
- the control unit 761 moves to the next step SP703 and ends the acceleration detection processing procedure RT70.
- step SP711 the control unit 711 extracts the original acceleration vector from the transmission data received by BLE by the data reception unit 782 (FIG. 39), and moves to the next step SP712. Specifically, the data receiving unit 782 restores the original acceleration vector by performing a predetermined demodulation process or the like on the received data in the communication unit 713 (FIG. 2), and supplies this to the vector synthesis processing unit 783.
- step SP712 the control unit 711 calculates the acceleration value, which is a scalar value corresponding to the magnitude of the acceleration vector, based on the acceleration vector, which is a three-dimensional vector value, by the vector synthesis processing unit 783, and next Move to step SP713.
- the vector synthesis processing unit 783 calculates the acceleration value ⁇ by performing arithmetic processing according to the following equation (1).
- control unit 711 performs the same processing as in steps SP2 to SP5 of the moving distance calculation processing procedure RT1 (FIG. 5) according to the first embodiment in steps SP713 to SP716, and moves to the next step SP717.
- the distance calculation processing procedure RT71 is terminated.
- the information processing system 700 detects a three-dimensional acceleration vector by the arm-mounted information terminal 751 mounted on the user's arm, and uses the obtained data as a portable information terminal. Send to 701.
- the mobile information terminal 701 receives the data, converts the three-dimensional acceleration vector into an acceleration value which is a scalar value, performs gravity correction processing, two integration processing, and the like, and extracts a start point and an end point. By doing so, the moving distance is calculated, and this is used as the compression depth in the immediately preceding compression operation.
- the mobile information terminal 701 displays this moving distance as the compression depth on the display unit 16, so that the rescuer performing the cardiac massage can recognize the compression depth in the immediately preceding compression motion as a numerical value, which is appropriate. It can be modified to the compression depth.
- the acceleration can be detected by the arm-worn information terminal 751, so that the portable information terminal 701 is used for the patient's chest and the rescuer.
- the portable information terminal 701 can be installed in a place where the rescuer can easily see it without having to pinch it between the hands of the rescuer. Therefore, in the information processing system 700, the rescuer can easily visually recognize the display unit 16 (that is, the touch panel 3) of the portable information terminal 701 on which the latest compression depth, cycle, and the like are displayed.
- the processing capacity of the arm-worn information terminal 751 is lower than that of the mobile information terminal 701, and the battery capacity is also smaller. Based on this, in the information processing system 700, the arm-worn information terminal 751 performs only extremely small processing until the three-dimensional acceleration vector is detected and transmitted, and other arithmetic processing and the like are performed on the portable information terminal 701. I tried to do it. As a result, in the information processing system 700, the arm-worn information terminal 751 is not subjected to an excessive processing load, and the reduction in the operable time can be suppressed to a small extent.
- the moving distance is displayed as the compression depth on the display unit 16 (FIG. 2) of the mobile information terminal 701 together with the cycle. Therefore, in the information processing system 700, the power consumption of the arm-mounted information terminal 751 can be suppressed as compared with the case where the movement distance or the like is displayed on the display unit 766 (FIG. 38) of the arm-mounted information terminal 751. Further, the display unit 16 (that is, the touch panel 3) of the stationary portable information terminal 701 can be easily visually recognized.
- the information processing system 700 according to the seventh embodiment can exert the same effect as that of the first embodiment.
- the information processing system 700 acquires the acceleration by the acceleration sensor 768 of the arm-worn information terminal 751, and performs gravity correction processing on the acceleration in the mobile information terminal 701.
- the distance is calculated by two integration processes, and the moving distance is calculated from the extracted start point and end point to obtain the compression depth.
- the information processing system 700 can make the rescuer performing the cardiac massage recognize the highly accurate compression depth in the immediately preceding compression operation and correct the compression depth to be appropriate.
- the information processing system 800 (FIG. 37) according to the eighth embodiment has a mobile information terminal 801 and an arm corresponding to the mobile information terminal 701 and the arm-worn information terminal 751 of the information processing system 700 according to the seventh embodiment, respectively. It is composed of a wearable information terminal 851. As shown in FIG. 2, the mobile information terminal 801 has a control unit 811 and a storage unit 812 that replace the control unit 711, the storage unit 712, and the communication unit 713, as compared with the mobile information terminal 701 according to the seventh embodiment. And, although it differs in that it has a communication unit 813, other points are similarly configured.
- the control unit 811 has a CPU 21, a ROM 22, a RAM 23, and the like, as in the seventh embodiment, and is adapted to read and execute various programs from the storage unit 812. However, the storage unit 812 stores a movement distance calculation program that is partially different from that of the seventh embodiment. Similar to the seventh embodiment, the communication unit 813 is used for mobile communication such as 4G and 5G, and various communication such as wireless LAN and BLE compliant with standards such as IEEE802.11a / b / g / n / ac / ax. Various information is transmitted and received wirelessly by a method that conforms to the standard.
- the arm-mounted information terminal 851 (FIG. 37) has a control unit 861 and a storage unit 862 instead of the control unit 761 and the storage unit 762 as compared with the arm-mounted information terminal 751 according to the seventh embodiment.
- the control unit 861 and a storage unit 862 instead of the control unit 761 and the storage unit 762 as compared with the arm-mounted information terminal 751 according to the seventh embodiment.
- control unit 861 has a CPU 771, a ROM 772, a RAM 773, and the like, and various programs are read from the storage unit 862 and the like and executed.
- control unit 861 is configured to execute an acceleration detection program that is partially different from that of the seventh embodiment.
- the movement distance is calculated in the mobile information terminal 801 based on the acceleration obtained by the acceleration sensor 768 of the arm-worn information terminal 851. ing.
- control unit 861 of the arm-worn information terminal 851 internally forms a plurality of functional blocks as shown in FIG. 41 corresponding to FIG. 39 when the acceleration detection program is read from the storage unit 862 and executed. .. Further, the control unit 811 of the mobile information terminal 801 forms a plurality of functional blocks as shown in FIG. 41 inside when the moving distance calculation program is read from the storage unit 812 and executed.
- control unit 861 of the arm-worn information terminal 851 has a configuration in which the vector synthesis processing unit 783 is added as compared with the seventh embodiment.
- control unit 811 of the mobile information terminal 801 has a configuration in which the vector synthesis processing unit 783 is omitted as compared with the seventh embodiment. That is, in the eighth embodiment, as compared with the seventh embodiment, the vector synthesis processing unit 783 seems to have moved from the mobile information terminal 701 (801) side to the arm-worn information terminal 751 (851) side. It is composed.
- step SP801 the control unit 861 performs the same processing as step SP701 of the acceleration detection processing procedure RT70 (FIG. 39) according to the seventh embodiment, acquires a three-dimensional acceleration vector, and moves to the next step SP802. ..
- step SP802 the control unit 861 uses the vector synthesis processing unit 783 as a scalar value according to the above equation (1) based on the acceleration vector which is a three-dimensional vector value, as in step SP712 of the movement distance calculation processing procedure RT71. A certain acceleration value is calculated, and the process proceeds to the next step SP803.
- step SP803 the control unit 861 transmits transmission data to the mobile information terminal 701 by BLE, as in step SP702 of the acceleration detection processing procedure RT70 (FIG. 39).
- the control unit 861 uses the acceleration value, which is a scalar value calculated by the vector synthesis processing unit 783, as transmission data.
- the control unit 861 moves to the next step SP804 and ends the acceleration detection processing procedure RT70.
- step SP811 the control unit 811 extracts the original acceleration value from the transmission data received by the BLE by the data reception unit 782 (FIG. 41), and moves to the next step SP812.
- the control unit 811 performs the same processing as steps SP713 to SP716 of the moving distance calculation processing procedure RT71 (FIG. 39) in steps SP812 to SP815, moves to the next step SP816, and ends the moving distance calculation processing procedure RT81.
- the information processing system 800 detects a three-dimensional acceleration vector by the arm-worn information terminal 851 mounted on the user's arm, as in the seventh embodiment. , This is converted into an acceleration value which is a scalar value and transmitted to the portable information terminal 801.
- the mobile information terminal 801 performs gravity correction processing, two integration processing, etc. on the received acceleration value, calculates the moving distance by extracting the start point and the end point, and uses this in the immediately preceding compression operation.
- the compression depth is a three-dimensional acceleration vector by the arm-worn information terminal 851 mounted on the user's arm.
- the accuracy of the portable information terminal 801 is based on the acceleration obtained from the acceleration sensor 768 of the arm-mounted information terminal 851 mounted on the user's arm. It is possible to calculate a good travel distance. As a result, the mobile information terminal 801 displays this moving distance as the compression depth on the display unit 16, so that the rescuer performing the cardiac massage can recognize the compression depth in the immediately preceding compression motion as a numerical value, which is appropriate. It can be modified to the compression depth.
- the arm-worn information terminal 851 converts a three-dimensional acceleration vector into an acceleration value and then transmits it to the mobile information terminal 801. Therefore, in the information processing system 800, the capacity of data transmitted from the arm-worn information terminal 851 to the mobile information terminal 801 can be reduced, and the time required to finally complete the calculation of the travel distance can be shortened.
- the information processing system 800 according to the eighth embodiment can exert the same effect as that of the seventh embodiment.
- the information processing system 800 acquires the acceleration by the acceleration sensor 768 of the arm-worn information terminal 851, and performs gravity correction processing on the acceleration in the mobile information terminal 801.
- the distance is calculated by two integration processes, and the moving distance is calculated from the extracted start point and end point to obtain the compression depth.
- the information processing system 800 can make the rescuer performing the cardiac massage recognize the highly accurate compression depth in the immediately preceding compression operation and correct the compression depth to be appropriate.
- the gravity correction value used for correcting the acceleration is the value of the standard gravity acceleration (9.80665 [m / s 2 ])
- the present invention is not limited to this, and for example, the value of the acceleration detected by the acceleration sensor 18 in the stationary state before the start of the compression operation (hereinafter, this is also referred to as the gravitational acceleration at rest) is referred to as the gravitational acceleration at this place at this time.
- Various other values may be regarded as gravity correction values, such as being regarded as gravity correction values. The same applies to the second to eighth embodiments.
- the speed difference between the two is defined as the start feature point and the end feature point at the points where the two maximum values appear continuously in the velocity waveform.
- the case of calculating the velocity inclination correction coefficient based on the time difference has been described.
- the present invention is not limited to this, and for example, in the velocity waveform, points having two maximum values separated so as to sandwich one or more maximum values between them are set as a start feature point and an end feature point, or a velocity waveform.
- Select two characteristic points that repeatedly appear in the velocity waveform such as the start feature point and the end feature point, which are the points that appear twice in succession, and the start feature point and the end feature point. It may be. The same applies to the third to sixth embodiments.
- the speed difference between the two is defined as the start feature point and the end feature point at the points (or other characteristic points) where the two maximum values appear in the velocity waveform.
- the case where the speed tilt correction process for calculating the speed tilt correction coefficient based on the time difference is performed has been described.
- the present invention is not limited to this, and for example, a point (or a characteristic point) having two maximum values appearing in an acceleration waveform is set as a start feature point and an end feature point, and is based on the difference in acceleration and the time difference between the two.
- the acceleration inclination correction process for calculating the acceleration inclination correction coefficient may be performed. The same applies to the third to sixth embodiments.
- the present invention is not limited to this, and for example, the median value between the average maximum value, which is the average of a plurality of maximum values in the latest plurality of cycles, and the average minimum value, which is the average of a plurality of minimum values, may be used as the center value.
- a value having the same positive and negative areas that is, the absolute value of the integrated value
- the center value may be calculated or determined by various methods and corrected so as to match 0 [m / s]. The same applies to the fourth to sixth embodiments.
- step SP211 of the speed slope correction process (FIG. 10) attention is paid to the slope of the speed, that is, the value obtained by differentiating the speed V with respect to time t (dV / dt).
- the feature point may be the point where the slope of the speed is maximized for each time range corresponding to the compression operation.
- the distance difference between the two is defined as the start feature point and the end feature point, which are the points at which the maximum values appear twice in succession in the distance waveform.
- the case of calculating the distance inclination correction coefficient based on the time difference has been described.
- the present invention is not limited to this, and for example, in the waveform of a distance, points having two maximum values separated so as to sandwich one or more maximum values between them are set as a start feature point and an end feature point, or, for example, a distance.
- Select two characteristic points that repeatedly appear in the distance waveform such as the start feature point and the end feature point that have two minimum values that appear consecutively in the waveform, and select the start feature point and end feature. It may be a point.
- the sixth embodiment select two characteristic points that repeatedly appear in the distance waveform, such as the start feature point and the end feature point that have two minimum values that appear consecutively in the waveform, and select the start feature point and end feature. It may be a point. The same applies to the sixth embodiment.
- the distance inclination correction process is performed after the gravity correction process, the speed inclination correction process and the center correction process are performed has been described.
- the present invention is not limited to this, and for example, the distance inclination correction process may be performed while only the gravity correction process is performed, or the gravity correction process and the speed inclination correction process are performed. The same applies to the sixth embodiment.
- the tilt end point and the tilt start point are set respectively based on the speed calculated based on the acceleration, and the static speed tilt correction coefficient is calculated, and the static speed is calculated in the compression operation.
- the case where the speed is corrected by using the inclination correction coefficient has been described.
- the present invention is not limited to this, for example, based on the acceleration obtained from the acceleration sensor 18 in a stationary state (hereinafter, this is also referred to as a pre-acceleration), the acceleration before 1 [s] and 1 [s] before the present time.
- the average value of the above may be calculated to be an acceleration correction value, and the acceleration may be corrected by using this acceleration correction value in the compression operation.
- the velocity waveform between the inclination start point and the inclination end point may be regarded as a linear line of velocity with respect to time, and the approximate inclination calculated by arithmetic processing such as the least squares method may be used as the pre-velocity coefficient. ..
- the tilt end point is 1 [s] before the current time, and the tilt start point is further 1 [s] before this.
- the pre-speed coefficient may be calculated by setting various time points as the inclination end point and the inclination start point.
- the moving distance is calculated by setting the specified compression depth to 55 [mm] and the specified frequency to 110 [rpm] when performing the compression operation using the jig.
- the specified compression depth may be set to various values such as 57 [mm] and 53 [mm]
- the specified frequency may be set to various values such as 105 [rpm] and 115 [rpm]. May be.
- the value may be any value within an appropriate range described in Non-Patent Document 2, and even more preferably a value close to the median value.
- the correction movement distance calculation unit 641 (FIG. 31) has four types of correction processes (gravity correction process, as in the fourth embodiment).
- the case of performing speed inclination correction processing, center correction processing, and distance inclination correction processing) has been described.
- the present invention is not limited to this, and a part of each correction process other than the gravity correction process may be omitted.
- the acceleration acquisition unit 31 is provided on the arm-worn information terminal 751 side, and the vector synthesis processing unit 783 and the gravity correction processing unit 32 or later are provided on the mobile information terminal 701 side.
- the case where each functional block is provided has been described.
- the acceleration acquisition unit 31 and the vector synthesis processing unit 783 are provided on the arm-worn information terminal 851 side, and each function after the gravity correction processing unit 32 is provided on the mobile information terminal 801 side. The case of providing a block was described.
- each function block up to the gravity correction processing unit 32 is provided on the arm-mounted information terminal side, and each function block after the integration processing unit 33 is provided on the mobile information terminal side.
- the allocation of each functional block on the type information terminal side and the mobile information terminal side may be changed as appropriate.
- the display unit 766 displays a display that periodically changes in accordance with the cycle of 110 [rpm], which is the specified frequency of the compression operation. Or, periodic notification may be performed according to the cycle, such as outputting a periodic sound from the speaker 754. Further, these notifications may be made on the mobile information terminal 701. Further, when the arm-worn information terminal 751 is provided with a vibrator, the vibrator may be operated in accordance with a cycle of 110 [rpm], which is a predetermined frequency of compression operation. However, in this case, it is desirable to perform a correction process on the value of the acceleration detected by the acceleration sensor 768 so as to eliminate the influence of the vibrator. The same applies to the eighth embodiment.
- the present invention is not limited to this, and may be based on various other communication methods such as a wireless LAN conforming to a standard such as IEEE802.11a / b / g / n / ac / ax, or mobile communication such as 4G or 5G. Transmission data may be transmitted and received. The same applies to the eighth embodiment.
- the movement distance is displayed on the display unit 16 (FIG. 2) together with the cycle as the compression depth by the cardiopulmonary resuscitation program.
- the present invention is not limited to this, and is displayed as a multi-step state such as "shallow”, “appropriate” and “deep” with respect to the compression depth, and “slow”, “appropriate” and “fast” with respect to frequency. It may be notified by displaying it as a state of a plurality of stages as described above, or it may be displayed as a graphical display such as a level meter.
- notifications are not limited to display, and may be notified by voice (human voice, sound effect, etc.), for example, or may be notified as vibration by a vibrator (not shown) built in the mobile information terminal 1. Further, these may be combined as appropriate. Further, the timing of notification is not limited to each compression operation, but may be various timings such as every predetermined number of times or every predetermined time.
- the acceleration acquisition unit 31 and the like (FIG. 4) of the control unit 11 are formed as a functional block by software.
- the present invention is not limited to this, and at least a part of the acceleration acquisition unit 31 and the like may be configured as a hardware circuit. The same applies to the second to eighth embodiments.
- various application programs such as a cardiopulmonary resuscitation program and a travel distance calculation program are stored in the storage unit 12 (FIG. 2) in advance, and the application is read out and executed to determine the travel distance.
- the case of performing calculation processing etc. was described.
- the present invention is not limited to this, and various application programs may be acquired from an external server or the like (not shown) via the communication unit 13, and executed.
- various application programs may be read and executed from a storage medium such as a detachable memory card.
- the travel distance calculation process or the like may be executed by executing the application program acquired through various means. The same applies to the second to eighth embodiments.
- the present invention is not limited to this, and the present invention may be applied to, for example, a tablet terminal, a portable game machine, a wristwatch-type terminal device called a smart watch, or various information processing devices incorporating an acceleration sensor.
- the compression operation may be performed with the information processing device sandwiched between the patient's chest and the rescuer's hand. The same applies to the second to eighth embodiments.
- the present invention is not limited to each of the above-described embodiments and other embodiments. That is, the present invention has an applicable scope to an embodiment in which each of the above-described embodiments and a part or all of the above-mentioned other embodiments are arbitrarily combined, and an embodiment in which a part is extracted. Is.
- the present invention can be used, for example, when a rescuer performs cardiopulmonary resuscitation on a patient.
- Preliminary speed correction unit 641 ... Corrected movement distance calculation unit, 642 ... Average calculation unit, 643 ... Calibration coefficient calculation unit , 644 ... Travel distance acquisition unit, 645 ... Calibration coefficient acquisition unit, 646 ... Calibration processing unit, 781 ... Data transmission unit, 782 ... Data reception unit, 783 ... Vector synthesis processing unit.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Cardiology (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Physics & Mathematics (AREA)
- Epidemiology (AREA)
- Rehabilitation Therapy (AREA)
- Physical Education & Sports Medicine (AREA)
- Pain & Pain Management (AREA)
- Pulmonology (AREA)
- Emergency Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Geometry (AREA)
- Physiology (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- General Physics & Mathematics (AREA)
- Percussion Or Vibration Massage (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022530527A JP7678593B2 (ja) | 2020-06-09 | 2021-06-03 | 移動距離算出方法 |
| US18/000,993 US20230233403A1 (en) | 2020-06-09 | 2021-06-03 | Moving distance calculation method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-100350 | 2020-06-09 | ||
| JP2020100350 | 2020-06-09 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021251277A1 true WO2021251277A1 (ja) | 2021-12-16 |
Family
ID=78846143
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/021265 Ceased WO2021251277A1 (ja) | 2020-06-09 | 2021-06-03 | 移動距離算出方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230233403A1 (https=) |
| JP (1) | JP7678593B2 (https=) |
| WO (1) | WO2021251277A1 (https=) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12508472B2 (en) * | 2020-06-17 | 2025-12-30 | FitForm Technologies Inc. | Tracking three-dimensional motion during an activity |
| CN119519723B (zh) * | 2021-07-08 | 2025-10-17 | 华为技术有限公司 | 数据压缩方法、装置、计算设备及存储系统 |
| DE102022122203B3 (de) * | 2022-09-01 | 2023-12-07 | Canon Production Printing Holding B.V. | Verfahren zum Vorhersagen eines Wartungszustandes einer Druckmaschine |
| CN117797029A (zh) * | 2023-12-25 | 2024-04-02 | 深圳市安保医疗科技股份有限公司 | Cpr参数检测方法、装置、计算机设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0875442A (ja) * | 1994-09-02 | 1996-03-22 | Murata Mfg Co Ltd | 簡易型測長機 |
| JPH11110118A (ja) * | 1997-10-06 | 1999-04-23 | Ricoh Co Ltd | ペン型入力装置 |
| JP2005046609A (ja) * | 2003-06-27 | 2005-02-24 | Zoll Medical Corp | Cpr時の胸部圧迫効果向上のための方法及び装置 |
| JP2013138918A (ja) * | 2002-10-25 | 2013-07-18 | Zoll Circulation Inc | 心肺蘇生中の胸部圧迫深度を決定するシステム |
-
2021
- 2021-06-03 JP JP2022530527A patent/JP7678593B2/ja active Active
- 2021-06-03 US US18/000,993 patent/US20230233403A1/en active Pending
- 2021-06-03 WO PCT/JP2021/021265 patent/WO2021251277A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0875442A (ja) * | 1994-09-02 | 1996-03-22 | Murata Mfg Co Ltd | 簡易型測長機 |
| JPH11110118A (ja) * | 1997-10-06 | 1999-04-23 | Ricoh Co Ltd | ペン型入力装置 |
| JP2013138918A (ja) * | 2002-10-25 | 2013-07-18 | Zoll Circulation Inc | 心肺蘇生中の胸部圧迫深度を決定するシステム |
| JP2005046609A (ja) * | 2003-06-27 | 2005-02-24 | Zoll Medical Corp | Cpr時の胸部圧迫効果向上のための方法及び装置 |
Non-Patent Citations (2)
| Title |
|---|
| AMEMIYA, TOMOHIRO ET AL.: "Motion Estimation and Instruction for Chest Compression CPR using a Smart Phone", IEICE TECHNICAL REPORT, vol. 112, no. 336, 29 November 2012 (2012-11-29), pages 35 - 39 * |
| YAMAMOTO, KODAI ET AL.: "Development of the place teaching system for cardiopulmonary resuscitation using a wearable senso r", PROCEEDINGS OF MULTIMEDIA, DISTRIBUTED, COOPERATIVE, AND MOBILE (DICOMO 2015) SYMPOSIUM, vol. 2015, no. 1, 21 July 2015 (2015-07-21), pages 809 - 817 * |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230233403A1 (en) | 2023-07-27 |
| JP7678593B2 (ja) | 2025-05-16 |
| JPWO2021251277A1 (https=) | 2021-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021251277A1 (ja) | 移動距離算出方法 | |
| US11589756B2 (en) | Processing impedance signals for breath detection | |
| CN106999757B (zh) | 用于训练用户的正确跑步的方法和系统 | |
| US9801587B2 (en) | Heart rate monitor with time varying linear filtering | |
| US10390762B2 (en) | Physiological metric estimation rise and fall limiting | |
| US10134307B2 (en) | Software application for a portable device for CPR guidance using augmented reality | |
| CN104135917B (zh) | 脉搏计 | |
| US20170042762A1 (en) | Hand mounted cpr chest compression monitor | |
| CN104027103A (zh) | 生物体信息检测装置以及脉搏计 | |
| CN107708538B (zh) | 稳健心率估计 | |
| WO2015152921A1 (en) | Calibration of a primary pedometer device using a secondary pedometer device | |
| JP2018047218A (ja) | 人の姿勢バランスを決定するための方法およびシステム | |
| JP2018513722A5 (https=) | ||
| CN109788920B (zh) | 信息处理设备、信息处理方法以及程序 | |
| CN108697331A (zh) | 用于提取心率信息的设备和方法 | |
| JP2017033301A (ja) | 情報処理装置及びプログラム | |
| EP3547903B1 (en) | Compression depth calculating device | |
| JP6115329B2 (ja) | 生体情報処理装置および生体情報処理方法 | |
| KR20200068254A (ko) | 휴대용 심폐 소생기 및 심폐 소생술 제공방법 | |
| JP6510327B2 (ja) | 移動運動解析装置、移動運動解析システム、およびプログラム | |
| JP6089056B2 (ja) | 運動状態解析システムとその方法、装置及びプログラム | |
| JP2023552571A (ja) | 人の精神的ストレスを検出するためのストレス検出装置、システム及び方法 | |
| JP2016182164A (ja) | 生体信号処理装置、生体信号処理プログラム、生体信号処理プログラムを記録したコンピュータ読み取り可能な記録媒体、生体信号処理方法 | |
| KR20190088847A (ko) | 전자 장치에서 혈압 보정 시점을 결정하기 위한 장치 및 방법 | |
| JP7247811B2 (ja) | リハビリ支援システム、リハビリ支援方法、およびリハビリ支援プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21822702 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022530527 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21822702 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21822702 Country of ref document: EP Kind code of ref document: A1 |