WO2021240792A1 - データ更新方法、データ更新装置及びプログラム - Google Patents
データ更新方法、データ更新装置及びプログラム Download PDFInfo
- Publication number
- WO2021240792A1 WO2021240792A1 PCT/JP2020/021364 JP2020021364W WO2021240792A1 WO 2021240792 A1 WO2021240792 A1 WO 2021240792A1 JP 2020021364 W JP2020021364 W JP 2020021364W WO 2021240792 A1 WO2021240792 A1 WO 2021240792A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- data
- point cloud
- tree structure
- region
- cloud data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
- G06T9/40—Tree coding, e.g. quadtree, octree
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
- G06T9/001—Model-based coding, e.g. wire frame
Definitions
- the present invention relates to a data update method, a data update device and a program.
- the three-dimensional measurement system measures the position of an object such as a structure (for example, a building) with a laser scanner or the like, and acquires point cloud data which is a set of three-dimensional position data.
- the 3D measurement system acquires the surface shape of the point cloud data. After that, it is possible to estimate the surface shape of the object based on the three-dimensional point cloud data acquired by the three-dimensional measurement system.
- measurement may be performed multiple times for the same measurement target area.
- a plurality of point cloud data related to the same measurement target area are generated.
- the same measurement target area may be measured by a plurality of devices, or may be measured a plurality of times from different directions.
- a plurality of point cloud data may be merged (superimposed).
- the same measurement target area may be periodically measured at different timings.
- the point cloud data in a part of the measurement target area may be replaced.
- a multi-layered ocree structure expressed by creating a cube that includes all the points existing in the point cloud data and recursively dividing the created cube into eight cubes is used.
- a coding technique for encoding three-dimensional point cloud data is known.
- PCC Point Cloud Compression
- MPEG Motion Picture Experts Group
- a reference coded block is generated according to the minimum value and the maximum value of the coordinates of the point cloud data, and the inside of the coded block is represented by an octree structure.
- the present invention provides a data update method, a data update device, and a program capable of facilitating processing in replacement of coded point cloud data and reducing the amount of calculation and the amount of memory used.
- the purpose is.
- One aspect of the present invention is a data update method in which a spatial region having point cloud data is divided and a plurality of divided spatial regions are represented by a tree structure, and the point cloud data to be divided is acquired.
- the acquisition step and the space area related to the point cloud data are probably a tree structure in which at least a part of the first divided space area is represented, and at least a part of the first divided space area.
- a maybe tree structure that includes, or is contained in at least a part of the first divided space area and represents at least a part of the second divided space area, is represented by a common maybe tree. It is a data update method having a division step for dividing the space area as described above.
- At least a part of the point group coded data in which the presence or absence of a point is expressed by a tree structure for each area where the area indicated by the point group data is divided is probably not decoded from the tree structure.
- It is a data update device to be replaced and the first acquisition unit that acquires the data of the replacement destination and the data of the replacement source that is the point group coding data of the divided area corresponding to the data to be replaced are acquired.
- One aspect of the present invention is a program for causing a computer to execute the above data update method.
- the whole block diagram of the 3D position measurement system 1 in 1st Embodiment of this invention The schematic diagram which shows the whole block defined by the information processing apparatus 10 in 1st Embodiment of this invention.
- the schematic diagram which shows the division process of the space area by the information processing apparatus 10 in the 1st Embodiment of this invention The schematic diagram which shows an example of the positional relationship of two point cloud data of an object to be merged.
- the flowchart which shows the coding process and the merge process by the information processing apparatus 10 in the 1st Embodiment of this invention The block diagram which shows the functional structure of the information processing apparatus 10 in the 1st Embodiment of this invention.
- the flowchart which shows the determination process of the tree structure area by the conventional information processing apparatus.
- the schematic diagram which shows the method of determining the tree structure region by the information processing apparatus 10 in the 2nd Embodiment of this invention.
- point cloud data refers to data indicating a set of coordinates in which a point exists in a predetermined spatial region.
- the point cloud data may further have attributes such as color information for each point.
- tree structure data refers to data in which the divided space including the measurement points in the space area is represented by an octree structure.
- encoded data refers to data in which the data of the octave tree structure is encoded (for example, arithmetically encoded).
- the octave structure adopted by Pcc described above will be described as an example, but the present invention shall be applied as long as it is a method in which the presence or absence of points in the spatial region is expressed by two or more branches. Is possible.
- FIG. 1 is an overall configuration diagram of the three-dimensional position measurement system 1 according to the first embodiment of the present invention.
- the three-dimensional measurement system 1 includes at least one mobile body (for example, two in FIG. 1) and an information processing apparatus 10.
- the mobile body 2 is, for example, an unmanned aerial vehicle (UAV) such as a drone, a manned aircraft, a vehicle, a robot, a ship, or the like.
- UAV unmanned aerial vehicle
- the information processing device 10 is a general-purpose computer such as a personal computer.
- the mobile body 2 is equipped with a point cloud data generation device 20.
- the point cloud data generation device 20 includes a distance measuring unit (not shown) and a position information acquisition unit (not shown).
- the ranging unit will be described as being a laser scanner.
- the ranging unit is not limited to the laser scanner.
- an electromagnetic wave (light, radio wave) having directivity other than laser light a distance measuring device that irradiates ultrasonic waves, or the like may be used.
- a handy type three-dimensional laser measuring device, stereo vision, a device capable of performing three-dimensional reconstruction from a moving image taken by a visible camera, or the like may be used as the distance measuring unit.
- a device in which a laser scanner and a visible camera or the like are combined may be used as the ranging unit.
- the point cloud data generation device 20 irradiates the laser beam toward the object to be measured ob at a constant elevation angle, and scans the laser beam in each direction of the irradiation.
- the object to be measured ob is, for example, a structure such as a building or a house, or a device installed in the area to be measured.
- the moving body 2 flies at a position where the point cloud data generation device 20 can irradiate the measurement target area including the measurement target area ob with the laser light and receive the reflected light.
- the scanning speed of the laser beam with respect to the measurement target area including the measurement target ob is generally the movement speed of the point cloud data generation device 20 (that is, the movement of the moving body 2 on which the point cloud data generation device 20 is mounted). It is a speed sufficiently faster than the speed). Therefore, a plurality of measurement points (intersections) obtained by one scanning can be roughly considered to be irradiated by laser light at the same time.
- the laser light is reflected at a measurement point on the surface of the measurement target ob existing in the measurement target area (that is, the intersection of the laser light and the surface of the measurement target ob), and the reflected light is the point group data generation device 20.
- the point cloud data generation device 20 measures the distance from the own device to the measurement point based on the phase difference between the irradiated laser light (irradiation light) and the reflected light.
- the point cloud data generation device 20 may be configured to calculate the distance from the own device to the measurement point based on the time from the irradiation of the laser beam to the reception of the reflected light.
- the point cloud data generation device 20 specifies the relative position (relative coordinates) of the measurement point with respect to the own device based on the measured distance and the azimuth angle in the irradiation direction of the laser beam.
- the point cloud data generation device 20 includes a position information acquisition unit (not shown).
- the position information acquisition unit is, for example, a GPS (Global Positioning System) receiver.
- the position information acquisition unit can acquire position information indicating the position and orientation of the point cloud data generation device 20 in the global coordinate system.
- the point cloud data generation device 20 can calculate the position (absolute coordinates) of the measurement point in the global coordinate system based on the position and attitude of the own device in the global coordinate system and the relative coordinates of the measurement point.
- the location information acquisition unit is not limited to the GPS receiver.
- the position information acquisition unit may be configured to include a device capable of directly measuring the current position of the point cloud data generation device 20, for example, a laser range finder, an ultrasonic range finder, a stereo vision, or the like.
- the location information acquisition unit may be configured to include SLAM (Simultaneous Localization and Mapping).
- the point cloud data generation device 20 generates three-dimensional point cloud data showing a set of absolute coordinates for each measurement point.
- the point cloud data generation device 20 generates, for example, three-dimensional point cloud data including tens of millions of measurement points in one measurement.
- the point cloud data generation device 20 is connected to the communication network N, for example, wirelessly.
- the point cloud data generation device 20 transmits the generated three-dimensional point cloud data to the information processing device 10 via the communication network N.
- the communication network N is, for example, the Internet, a dedicated line, or the like.
- the communication network N may be a wired network or a network in which wireless and wired are combined.
- the information processing device 10 acquires the three-dimensional point cloud data transmitted from the point cloud data generation device 20.
- the information processing apparatus 10 converts the acquired three-dimensional point cloud data into tree structure data, which will be described later. Further, the information processing apparatus 10 encodes the tree structure data into the coded data described later (for example, arithmetic coding).
- the information processing device 10 stores the coded data.
- the point cloud data generation device 20 generates a plurality of three-dimensional point cloud data by irradiating the measurement target area containing the same measurement target ob a plurality of times with laser light. Therefore, each measurement target region that is the target of measurement of the generated plurality of three-dimensional point cloud data includes a common spatial region. That is, the common spatial region includes at least the measurement target object ob and the spatial region in the vicinity of the measurement target object ob.
- one point cloud data generation device 20 generates a plurality of three-dimensional point cloud data by irradiating the same measurement target area with laser light from different directions while moving.
- the configuration is not limited to this.
- one point cloud data generator 20 irradiates the same object to be measured with laser light at different timings (for example, every few hours or every few days), thereby performing a plurality of three dimensions. It may be configured to generate point cloud data.
- a plurality of point cloud data generation devices 20 irradiate the same measurement target area with laser light (for example, simultaneously), and each of the plurality of point cloud data generation devices 20 generates three-dimensional point cloud data. It may be a configuration to be generated.
- the information processing device 10 acquires a plurality of three-dimensional point cloud data generated for a measurement target area including a common spatial area from the point cloud data generation device 20, respectively.
- the information processing apparatus 10 converts the plurality of three-dimensional point cloud data into tree structure data, which will be described later, and encodes the coded data, respectively.
- the information processing device 10 stores coded data based on a plurality of three-dimensional point cloud data, respectively.
- the information processing apparatus 10 performs replacement using a plurality of coded data generated for the measurement target area including the common spatial area.
- replacement is the (whole or partial) merging and part of multiple 3D point cloud data based on multiple coded data generated for the area to be measured, including a common spatial area. It is a process of replacing the three-dimensional point cloud data in the area of.
- the information processing device 10 acquires three-dimensional point cloud data from the point cloud data generation device 20.
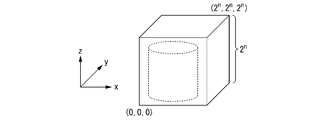
- the information processing apparatus 10 defines a spatial region of a cube (voxel) including the coordinates of all the measurement points indicated by the three-dimensional point cloud data.
- the defined spatial area may be a rectangular parallelepiped.
- the spatial area including the coordinates of all the measurement points indicated by the three-dimensional point cloud data is referred to as "whole block".
- FIG. 2 is a schematic diagram showing an entire block defined by the information processing apparatus 10 according to the first embodiment of the present invention.
- the three-dimensional point cloud data (coordinate data group of each measurement point) is shown in a cylindrical shape.
- each point in the three-dimensional point cloud data is data representing each measurement point having three coordinates (x, y, z).
- each coordinate is represented by a floating point or fixed point real number.
- each point of the three-dimensional point cloud data may include color information (RGB), normal vector information, and the like as additional information in addition to the coordinate values of (x, y, z).
- RGB color information
- the coordinate values of (x, y, z) of each point of the three-dimensional point cloud data are represented by fixed point numbers, and additional information other than the coordinate values. Will be described as not including.
- the information processing apparatus 10 translates the coordinates (x, y, z) of each measurement point included in the three-dimensional point cloud data, and the minimum value of the coordinates (x, y, z) of the entire block is (0, y, z). Adjust so that it becomes 0,0). Further, the information processing apparatus 10 has x ⁇ 2 n , y ⁇ 2 n , z ⁇ 2 n (here, n) at the coordinates (x, y, z) of all the measurement points included in the three-dimensional point cloud data. Is a natural number), and the maximum value of the coordinates (x, y, z) of the whole block is adjusted.
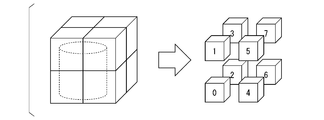
- the information processing apparatus 10 divides each side of the entire block into two, thereby dividing the space area into eight cubes (blocks).
- each of the divided spatial areas is referred to as a "partial block”.
- FIGS. 3 to 5 are schematic views showing a space region division process by the information processing apparatus 10 according to the first embodiment of the present invention. Also in FIGS. 3 and 4, in order to simplify the drawing, the three-dimensional point cloud data (coordinate data group of each measurement point) is shown in a cylindrical shape.
- the information processing apparatus 10 divides the entire block into eight partial blocks by dividing each side of the entire block containing all the three-dimensional point cloud data into two.
- each of the eight partial blocks is labeled from "0" to "7".
- the information processing apparatus 10 includes at least one point (that is, coordinate data of the measurement point) in each of the partially labeled "0" to "7" partial blocks. To judge.
- the information processing apparatus 10 further divides the partial block into eight partial blocks with respect to the partial block containing at least one point.
- the information processing apparatus 10 divides each side of the partial block to be divided into two, thereby dividing the partial block into eight smaller partial blocks.
- the information processing apparatus 10 does not divide a partial block that does not include a point.
- FIG. 4 shows the division process when points are included in the partial blocks labeled with “0” and “7” at least in FIG. Further, FIG. 4 shows a division process in the case where no point is included in the partial blocks labeled with “1”, “3”, “4”, “5”, and “6” at least in FIG. Represents.
- each node of the second layer or lower of the octave structure represents a partial block.
- the nodes represented by "0" and "7" represent the partial blocks labeled with the above-mentioned "0" and "7". Since the subblocks labeled with "0" and "7" are subblocks that have been further divided, the nodes indicated by "0" and "7” are further branched into eight nodes in the third layer, respectively. doing. Represents.
- the value of the node is f (1,1,0,0,0,0).
- 0) 3.
- the value of each node can be represented by a value from 0 to 255.
- the information processing apparatus 10 obtains encoded data by encoding the tree structure data (for example, arithmetic coding and the above-mentioned translation data may also be encoded).
- the information processing device 10 stores the coded data.
- the information processing apparatus 10 stores coded data based on a plurality of three-dimensional point cloud data generated for a measurement target region including a common spatial region. After that, the information processing apparatus 10 performs replacement using the plurality of coded data.
- the spatial region is expressed in two dimensions instead of three dimensions. Further, in order to make the explanation easy to understand, first, a replacement method using a conventional information processing apparatus will be described.
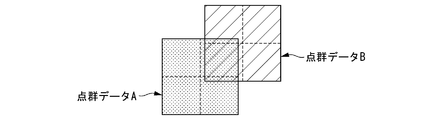
- FIG. 6 is a schematic diagram showing an example of the positional relationship between the two point cloud data to be merged.
- the two point cloud data to be merged are the point cloud data A and the point cloud data B.
- the point cloud data A and the point cloud data B are a set of coordinate data of measurement points existing in a measurement target area including a common spatial area. As shown in FIG. 6, the point cloud data A and the point cloud data B have overlapping regions, and the overlapping regions are the above-mentioned common spatial regions.
- the conventional information processing apparatus decodes a plurality of coded data (for example, coded data based on the point group data A and the point group data B shown in FIG. 6) generated for the measurement target area including the common spatial area.
- coded data for example, coded data based on the point group data A and the point group data B shown in FIG. 6
- each tree structure data for example, the tree structure data A shown in FIG. 7 and the tree structure data B shown in FIG. 8 are obtained.
- FIG. 7 is a diagram showing an example of tree structure data converted from the point cloud data A by a conventional information processing device.
- FIG. 8 is a diagram showing an example of tree structure data converted from the point cloud data B by the conventional information processing apparatus.
- the tree structure data A converted from the point cloud data A and the tree structure data B converted from the point cloud data B are each point cloud data (that is, a coordinate data group). Convert to point cloud data A and point cloud data B).
- the conventional information processing apparatus merges the point cloud data A and the point cloud data B, which are the coordinate data groups. Then, the conventional information processing apparatus obtains the merged coded data by converting the merged point cloud data into tree structure data again and then encoding the data.
- FIG. 9 is a flowchart showing a coding process and a merge process by a conventional information processing apparatus. This flowchart is started when the conventional information processing apparatus acquires the point cloud data (point cloud data A and point cloud data B) transmitted from the point cloud data generator.
- the conventional information processing device converts the point cloud data A into the tree structure data A (step S001a). Next, the conventional information processing apparatus converts the tree structure data A into the coded data A and stores it (step S002a). Further, the conventional information processing apparatus converts the point cloud data B into the tree structure data B (step S001b). Next, the conventional information processing apparatus converts the tree structure data B into the coded data B and stores it (step S002b).
- the above is the coding process by the conventional information processing device. After that, the following merge process is executed at any timing.
- the conventional information processing device arithmetically decodes the stored coded data A and converts it into tree structure data A (step S003a).
- the conventional information processing apparatus converts the tree structure data A into the point cloud data A (step S004a).
- the conventional information processing apparatus arithmetically decodes the stored coded data B and converts it into tree structure data B (step S003b).
- the conventional information processing apparatus converts the tree structure data B into the point cloud data B (step S004b).
- the conventional information processing apparatus generates the point cloud data C by merging the point cloud data A and the point cloud data B (step S005).
- the conventional information processing apparatus generates the tree structure data C from the point cloud data C (step S006).
- the conventional information processing apparatus generates the coded data C by arithmetically coding the tree structure data C (step S007). This completes the coding process and the merge process by the conventional information processing apparatus shown in the flowchart of FIG.
- the conventional information processing apparatus can merge a plurality of coded data generated for the measurement target area including the common spatial area.
- a plurality of encoded point cloud data are once decoded and the point cloud data (point cloud data (). It cannot be replaced unless it is restored to the coordinate data group).
- the amount of calculation in coding and decoding increases, and the device configuration becomes complicated.
- the replacement method by the information processing apparatus 10 in the first embodiment will be described.
- the two point cloud data to be merged are the same as the point cloud data A and the point cloud data B whose positional relationship with each other is shown in FIG. 6 as an example.
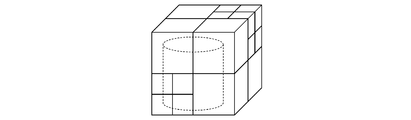
- the information processing apparatus 10 is a higher-level coded block in which the spatial area of the entire block based on the point cloud data A is one partial block, and all of the point cloud data B.
- a coded block (hereinafter referred to as "B'whole block as a spatial area for expressing the point cloud data B in a tree structure") is defined so as to include the point cloud data of.
- the whole block of B'as a spatial area for expressing the point cloud data B in a tree structure does not include each point of the point cloud data A, but includes only each point of the point cloud data B.
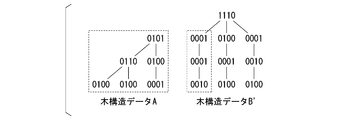
- the information processing device 10 converts the point cloud data A into the tree structure data A. Further, the information processing apparatus 10 converts the entire block of B'as a spatial area for expressing the point cloud data B in a tree structure into the tree structure data B'.
- FIG. 11 shows an example of the tree structure data A and the tree structure data B'converted by the information processing apparatus 10.
- the range within the dotted line of the tree structure data A and the tree structure data B'in FIG. 11 is a division of the entire B'block as a spatial area for expressing the point cloud data B shown in FIG. 10 in a tree structure 4 Of the three partial blocks, it corresponds to the lower left partial block (that is, the spatial area corresponding to the entire block of the point cloud data A).
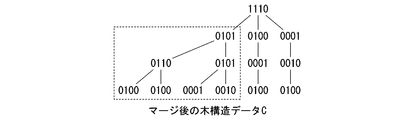
- the information processing apparatus 10 merges the range of the tree structure in the dotted line of the tree structure data A shown in FIG. 11 with the range of the tree structure in the dotted line of the tree structure data B'shown in FIG. Generate tree structure data C. Specifically, the information processing apparatus 10 calculates the logical sum for each layer for the range within the dotted line of both.
- FIG. 12 is a schematic diagram showing the tree structure data C generated by merging the tree structure data A and the tree structure data B'shown in FIG. 11.
- the information processing apparatus 10 in the present embodiment is a reference code commonly used among a plurality of point group data to be replaced so that the tree structure data can be added together.
- the conversion block is defined in advance.
- FIG. 13 is a flowchart showing a coding process and a merge process by the information processing apparatus 10 according to the first embodiment of the present invention.
- This flowchart is started when the information processing device 10 acquires the point cloud data (point cloud data A and point cloud data B) transmitted from the point cloud data generation device 20.
- the point cloud data B is acquired first and then corresponds to the point cloud data B. It may be designed to acquire the point cloud data (point cloud data A) expressing the spatial area to be used. The same applies to embodiments other than the present embodiment.
- the information processing apparatus 10 determines the tree structure region of the point cloud data A and the point cloud data B (step S101).
- the tree structure region of the point cloud data A and the point cloud data B is determined so that the reference coded blocks match.
- the information processing apparatus 10 converts the point cloud data A into the tree structure data A (step S102a).
- the information processing apparatus 10 converts the tree structure data A into the coded data A and stores it (step S103a).
- the information processing apparatus 10 converts the point cloud data B into the tree structure data B (step S102b).
- the information processing apparatus 10 converts the tree structure data B into the coded data B and stores it (step S103b).
- the above is the coding process by the information processing apparatus 10 in the first embodiment. After that, the following merge process is executed at any timing.
- the information processing apparatus 10 arithmetically decodes the stored coded data A and converts it into tree structure data A (step S104a). Further, the information processing apparatus 10 arithmetically decodes the stored coded data B and converts it into tree structure data B (step S104b). Next, the information processing apparatus 10 generates the tree structure data C by merging the tree structure data A and the tree structure data B (step S105). Next, the information processing apparatus 10 generates coded data C from the tree structure data C (step S106). This completes the coding process and the merge process by the information processing apparatus 10 in the first embodiment shown in the flowchart of FIG.
- the information processing apparatus 10 in the first embodiment can merge a plurality of coded data generated for a measurement target area including a common spatial area. Further, according to the information processing apparatus 10 in the first embodiment, when the coded point cloud data is replaced, the coded plurality of point cloud data are decoded into the tree structure data, respectively. It is replaced by tree structure data. That is, unlike the conventional information processing device described above, the information processing device 10 in the first embodiment needs to decode a plurality of encoded point cloud data into point cloud data which is a coordinate data group. No.
- the information processing apparatus 10 defines a common spatial area (higher than the entire block based on the point cloud data A) including both the point cloud data A and the point cloud data B, and the common spatial area is defined. This is to generate the tree structure data of the octal structure based on. This makes it possible to add up tree structure data.
- the information processing apparatus 10 in the present embodiment for example, in a state where the coded data of the point cloud data A already exists, at least a part of the point cloud data A is replaced by at least one part of the point cloud data B.
- This is effective when, for example, it becomes necessary to update (replace) the point cloud data for an unexpected spatial area, such as in such a situation.
- the information processing apparatus 10 in the first embodiment can facilitate the processing in the replacement of the coded point cloud data. As a result, an increase in the amount of calculation and an increase in the amount of memory used in coding and decoding are suppressed, and the device configuration is simplified.
- FIG. 14 is a block diagram showing a functional configuration of the information processing apparatus 10 according to the first embodiment of the present invention.
- the information processing apparatus 10 includes a coding processing unit 100, a storage unit 110, and a replacement processing unit 120.
- the coding processing unit 100 includes an acquisition unit 101, a region determination unit 102, a tree structure conversion unit 103, and a coding unit 104.
- the acquisition unit 101 acquires a plurality of three-dimensional point cloud data transmitted from the point cloud data generation device 20 for a measurement target area including a common spatial area.
- the area determination unit 102 determines the tree structure area of the plurality of three-dimensional point cloud data acquired by the acquisition unit 101, respectively. Each tree structure region is determined in a positional relationship so that the reference coding blocks match.
- the tree structure conversion unit 103 converts the plurality of three-dimensional point cloud data acquired by the acquisition unit 101 into tree structure data according to the tree structure region determined by the region determination unit 102.
- the coding unit 104 encodes (for example, arithmetically coded) a plurality of tree structure data converted by the tree structure conversion unit 103, respectively.
- the coding unit 104 records a plurality of coded data in the storage unit 110.
- the storage unit 110 stores encoded data in which a plurality of three-dimensional point cloud data generated for a measurement target area including a common spatial area are encoded. Further, the storage unit 110 stores the coded data replaced by the replacement unit 123, which will be described later.
- the storage unit 110 is, for example, a storage medium such as a RAM (RandomAccessMemory; readable / writable memory), a flash memory, an EEPROM (Electrically ErasableProgrammableReadOnlyMemory), and an HDD (HardDiskDrive), or a storage medium thereof. Consists of any combination.
- the replacement processing unit 120 includes an acquisition unit 121, a decoding unit 122, a replacement unit 123, and a coding unit 124.
- the acquisition unit 121 acquires the coded data in which the plurality of three-dimensional point cloud data generated for the measurement target area including the common spatial area recorded in the storage unit 110 by the coding unit 104 are encoded. ..
- the decoding unit 122 decodes (for example, arithmetically decodes) a plurality of coded data acquired by the acquisition unit 121, respectively, and obtains tree structure data corresponding to each coded data.
- the replacement unit 123 obtains the replaced tree structure data by performing replacement (for example, merging, replacement of some data, etc.) using the plurality of tree structure data obtained by the decoding unit 122.
- the coding unit 124 encodes (for example, arithmetically coded) the replaced tree structure data obtained by the replacement unit 123.
- the coding unit 104 records the replaced coded data in the storage unit 110.
- the coding unit 124 and the above-mentioned coding unit 104 may be functional units composed of common hardware resources or software resources.
- a plurality of three-dimensional point group data generated for a measurement target area including a common spatial area is acquired from the point group data generation device 20 and encoded. After that, the coded data was once recorded in the storage unit 110. After that, the information processing apparatus 10 was configured to take out a plurality of coded data from the storage unit 110 and replace them at an arbitrary timing.
- Such a configuration includes a plurality of 3s acquired from the point cloud data generation device 20, for example, when the three-dimensional point cloud data is partially updated at different timings (for example, periodically). It is suitable for cases where the acquisition timing of the dimension point cloud data is different.
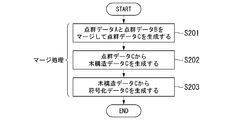
- FIG. 15 is a flowchart showing an example of a merge process in a conventional information processing apparatus. This flowchart is started when the conventional information processing apparatus acquires the point cloud data (point cloud data A and point cloud data B) transmitted from the point cloud data generator.
- the conventional information processing apparatus generates the point cloud data C by merging the point cloud data A and the point cloud data B (step S201). Next, the conventional information processing apparatus generates the tree structure data C from the point cloud data C (step S202). Next, the conventional information processing apparatus generates the coded data C by encoding the tree structure data C (step S203). This completes the merge process by the conventional information processing apparatus shown in the flowchart of FIG.
- FIG. 16 is a flowchart showing a merge process by the information processing apparatus 10 in the modified example of the first embodiment of the present invention. This flowchart is started when the information processing device 10 acquires the point cloud data (point cloud data A and point cloud data B) transmitted from the point cloud data generation device 20.
- the information processing apparatus 10 determines the tree structure region of the point cloud data A and the point cloud data B (step S301). The tree structure region of the point cloud data A and the point cloud data B is determined so that the reference coded blocks match. Next, the information processing apparatus 10 converts the point cloud data A into the tree structure data A (step S302a). Further, the information processing apparatus 10 converts the point cloud data B into the tree structure data B (step S302b). Next, the information processing apparatus 10 generates the tree structure data C by merging the tree structure data A and the tree structure data B (step S303). Next, the information processing apparatus 10 generates the coded data C by encoding the tree structure data C (step S304). This completes the merge process by the information processing apparatus 10 in the modified example of the first embodiment shown in the flowchart of FIG.
- FIG. 17 is a flowchart showing a determination process of a tree structure region by a conventional information processing apparatus.
- the tree structure region A of the point cloud data A is determined based on the minimum value and the maximum value of the (x, y, z) coordinates of the point cloud data A (step S401a).
- the conventional information processing apparatus converts the point cloud data A into the tree structure data A according to the tree structure region A (step S402a).
- the conventional information processing apparatus arithmetically encodes the tree structure data A and converts it into the coded data A (step S403a).
- the conventional information processing apparatus determines the tree structure region B of the point cloud data B based on the minimum value and the maximum value of the (x, y, z) coordinates of the point cloud data B (step S401b).
- the conventional information processing apparatus converts the point cloud data B into the tree structure data B according to the tree structure region B (step S402b).
- the conventional information processing apparatus arithmetically encodes the tree structure data B and converts it into the coded data B (step S403b). This completes the process of determining the tree structure region by the conventional information processing apparatus shown in the flowchart of FIG.
- the conventional information processing apparatus has, for each of a plurality of point cloud data, a coded block and a tree structure region based on the minimum value and the maximum value of the (x, y, z) coordinates of each point cloud data. Is defined for each point cloud data. Therefore, in the conventional information processing apparatus for determining the tree structure region, it is difficult to replace the tree structure data in the state of the tree structure data because the positions of the reference coded blocks do not match each other.
- FIG. 18 is a flowchart showing a determination process of a tree structure region by the information processing apparatus 10 in the first embodiment.
- the information processing apparatus 10 determines the tree structure region A of the point cloud data A based on the minimum and maximum values of the (x, y, z) coordinates of the point cloud data A (step S501a). Further, the information processing apparatus 10 determines the tree structure region B of the point cloud data B based on the minimum value and the maximum value of the (x, y, z) coordinates of the point cloud data B (step S501b).
- the information processing apparatus 10 includes the tree structure area A, and all the point groups of the point group data B are included.
- the tree structure region B'to be included is determined (step S503).
- the information processing apparatus 10 converts the point group data A and the point group data B into the tree structure data A and the tree structure data B'according to the tree structure area A and the tree structure area B'(step S504). ).
- the information processing apparatus 10 arithmetically encodes the tree structure data A and the tree structure data B'and converts them into the coded data A and the coded data B', respectively (step S505).
- the information processing apparatus 10 displays the point group data A and the point group data B in a tree structure. It is converted into the tree structure data A and the tree structure data B according to the area A and the tree structure area B (step S506).
- the information processing apparatus 10 arithmetically encodes the tree structure data A and the tree structure data B, and converts them into the coded data A and the coded data B (step S507). This completes the process of determining the tree structure region by the information processing apparatus 10 in the first embodiment shown in the flowchart of FIG.
- FIG. 19 is a schematic diagram showing a method of determining a tree structure region by the information processing apparatus 10 according to the second embodiment of the present invention. As shown in FIG. 19, the information processing apparatus 10 defines a tree structure region C including all the measurement points included in the point cloud data A and all the measurement points included in the point cloud data B. ..
- FIG. 20 is a flowchart showing a determination process of a tree structure region by the information processing apparatus 10 in the second embodiment.
- the information processing apparatus 10 determines the tree structure region A of the point cloud data A based on the minimum and maximum values of the (x, y, z) coordinates of the point cloud data A (step S601a). Further, the information processing apparatus 10 determines the tree structure region B of the point cloud data B based on the minimum value and the maximum value of the (x, y, z) coordinates of the point cloud data B (step S601b).
- step S602 when the tree structure area A and the tree structure area B do not match (step S602 ⁇ No), all the point clouds of the point cloud data A and all the point clouds of the point cloud data B are displayed. Determine the tree structure region C to be included. (Step S603).
- the information processing apparatus 10 converts the point cloud data A and the point cloud data B into the tree structure data A'and the tree structure data B', respectively, in accordance with the tree structure region C (step S604).
- step S604 Next, the information processing apparatus 10 arithmetically encodes the tree structure data A'and the tree structure data B', respectively, and converts them into coded data A'and coded data B'(step S605).
- step S602 when the tree structure area A and the tree structure area B match (step S602 ⁇ Yes), the information processing apparatus 10 displays the point group data A and the point group data B in the tree structure area A and the tree structure area. It is converted into the tree structure data A and the tree structure data B according to B (step S606). Next, the information processing apparatus 10 arithmetically encodes the tree structure data A and the tree structure data B, and converts them into the coded data A and the coded data B, respectively (step S607). This completes the process of determining the tree structure region by the information processing apparatus 10 in the second embodiment shown in the flowchart of FIG.
- both the point cloud data A and the point cloud data B are in a state where the point cloud data A and the point cloud data B are not encoded.
- the space area is divided so as to include, and the divided space area is expressed by an octree structure.
- the replacement can be performed without performing special processing (for example, processing for aligning the positions of the coded blocks) within the divided spatial area.
- the positional relationship of the plurality of point cloud data to be merged is the same as the positional relationship of the two point cloud data (point cloud data A and point cloud data B) shown in FIG. It is explained as.
- FIG. 21 is a schematic diagram showing a method of determining a tree structure region by the information processing apparatus 10 according to the third embodiment of the present invention.
- the information processing apparatus 10 has any of the vertices of the divided blocks (for example, partial blocks) of the tree structure region A as vertices, and includes all the measurement points included in the point cloud data B. Define the tree structure area B'.
- FIG. 22 is a flowchart showing a determination process of a tree structure region by the information processing apparatus 10 in the third embodiment.
- the information processing apparatus 10 determines the tree structure region A of the point cloud data A based on the minimum and maximum values of the (x, y, z) coordinates of the point cloud data A (step S701a). Further, the information processing apparatus 10 determines the tree structure region B of the point cloud data B based on the minimum value and the maximum value of the (x, y, z) coordinates of the point cloud data B (step S701b).
- step S702 when the tree structure area A and the tree structure area B do not match (step S702 / No), the information processing apparatus 10 sets any of the vertices of the divided blocks of the tree structure area A as the vertices, and sets the vertices as the vertices.
- the tree structure region B'including all the measurement points included in the point cloud data B is determined (step S703).
- the information processing apparatus 10 converts the point group data A and the point group data B into the tree structure data A and the tree structure data B'in accordance with the tree structure area A and the tree structure area B', respectively. (Step S704).
- the information processing apparatus 10 arithmetically encodes the tree structure data A and the tree structure data B', respectively, and converts them into the coded data A and the coded data B'(step S705).
- step S702 ⁇ Yes the information processing apparatus 10 displays the point group data A and the point group data B in the tree structure area A and the tree structure area. It is converted into the tree structure data A and the tree structure data B according to B (step S706).
- step S707 the information processing apparatus 10 arithmetically encodes the tree structure data A and the tree structure data B, and converts them into the coded data A and the coded data B, respectively (step S707). This completes the process of determining the tree structure region by the information processing apparatus 10 according to the third embodiment shown in the flowchart of FIG.
- the positional relationship of the plurality of point cloud data to be merged is a positional relationship such as the two point cloud data (point cloud data A and point cloud data B) shown in FIG. 23. It is explained as.
- the matter in which some areas represented by the two point cloud data overlap has been examined.
- a case where a part of the area represented by the two point cloud data does not overlap, but one block smaller than the whole block by one unit or more can contain both point cloud data will be examined.
- one unit may be referred to as the size of one block of the cube divided into eight, that is, the depth of the hierarchy.
- FIG. 24 is a schematic diagram showing a method of determining a tree structure region by the information processing apparatus 10 according to the fourth embodiment of the present invention.
- the information processing apparatus 10 generates a tree structure region C including a tree structure region A and including all measurement points included in the point cloud data B.
- the information processing apparatus 10 defines a tree structure region B'which has any of the vertices of the divided block (for example, a partial block) of the tree structure region C as a vertex and includes all the point cloud data B.
- FIG. 25 is a flowchart showing a determination process of a tree structure region by the information processing apparatus 10 in the fourth embodiment.
- the information processing apparatus 10 determines the tree structure region A of the point cloud data A based on the minimum and maximum values of the (x, y, z) coordinates of the point cloud data A (step S801a). Further, the information processing apparatus 10 determines the tree structure region B of the point cloud data B based on the minimum value and the maximum value of the (x, y, z) coordinates of the point cloud data B (step S801b).
- the information processing apparatus 10 includes the tree structure area A and all included in the point group data B.
- a tree structure region C including measurement points is generated.
- the information processing apparatus 10 uses any of the vertices of the divided blocks of the tree structure region C as vertices, and generates a tree structure region B'including all the measurement points included in the point cloud data B (step S803).
- the information processing apparatus 10 converts the point group data A and the point group data B into the tree structure data A and the tree structure data B'in accordance with the tree structure area A and the tree structure area B', respectively. (Step S804).
- the information processing apparatus 10 arithmetically encodes the tree structure data A and the tree structure data B', respectively, and converts them into the coded data A and the coded data B'(step S805).
- step S802 when the tree structure area A and the tree structure area B match (step S802 ⁇ Yes), the information processing apparatus 10 displays the point group data A and the point group data B in the tree structure area A and the tree structure area. It is converted into the tree structure data A and the tree structure data B according to B (step S806). Next, the information processing apparatus 10 arithmetically encodes the tree structure data A and the tree structure data B, and converts them into the coded data A and the coded data B, respectively (step S807). This completes the process of determining the tree structure region by the information processing apparatus 10 according to the fourth embodiment shown in the flowchart of FIG. 25.
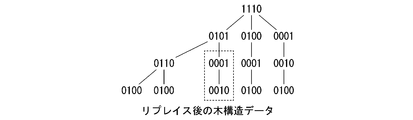
- FIG. 26 shows two tree structure data A and B'in which a part of the area to be represented is common. It is assumed that the tree structure data A and B'are encoded by the blocks arranged as described above. That is, the method of arranging the blocks is the same as that of the first embodiment. In addition, the area surrounded by the dotted line is regarded as a common area. It should be noted here that the common area is different from the first embodiment. Further, since the same example as that of the first embodiment is used, the method of arranging the blocks is described as the same as that of the first embodiment, but the same arrangement method as that of the other embodiments described above may be used. good.
- FIG. 27 shows the tree structure data after the replacement.
- the merging was performed, but in the present embodiment, it may be replaced with the data of the tree structure data B'.
- the error of the internal coordinates of the point cloud data and the accuracy between the point cloud data may be a gap.
- the method described in Non-Patent Document 2 can be used.
- the data updater is at least a part of the point cloud coded data in which the presence or absence of points is represented by a tree structure for each region where the region indicated by the point cloud data is divided. Is probably replaced without decoding from the tree structure.
- the data update device is the information processing device 10 in the embodiment
- the point cloud data is the three-dimensional point cloud data in the embodiment
- the area indicated by the point cloud data is the entire block in the embodiment and is divided.
- the regions are the partial blocks in the embodiment
- the points are the measurement points in the embodiment
- the maybe tree structure is the ocree structure in the embodiment
- the point cloud coded data is the tree in the embodiment. It is structural data.
- the data update device includes a first acquisition unit, a second acquisition unit, and a replacement unit.
- the first acquisition unit and the second acquisition unit are the acquisition unit 121 in the embodiment
- the replacement unit is the replacement unit 123 in the embodiment.
- the first acquisition unit acquires the data of the replacement destination.
- the replacement destination data is the point cloud data A in the embodiment.
- the second acquisition unit acquires the data of the replacement source which is the point cloud coded data of the divided area corresponding to the data to be replaced.
- the replacement destination data is the point cloud data B in the embodiment.
- the replacement unit replaces the data of the replacement source with the data of the replacement destination.
- the data update device may further include a subdivision unit.
- the subdivision unit is the region determination unit 102 in the embodiment.
- the subdivision unit includes a first area corresponding to the data of the replacement destination and a second area corresponding to the data of the replacement source, and divides an area larger than at least the second area as the first area. May be good.
- the first region is a spatial region in which the spatial region based on the tree structure region A and the spatial region based on the tree structure region B in the embodiment overlap, and the second region is included in the tree structure region B in the embodiment.
- the spatial region, which is larger than the second region is the spatial region based on the tree structure region B'in the embodiment.
- the subdivision unit may divide the area including the first area including the data of the replacement destination and the second area including the data of the replacement source.
- the first region is a spatial region based on the tree structure region A (FIG. 3) in the embodiment
- the second region is a spatial region based on the tree structure region B (FIG. 3) in the embodiment.
- the region larger than the second region is the spatial region based on the tree structure region C (in FIG. 3) in the embodiment.
- the subdivision portion includes a first region corresponding to the data of the replacement destination and a second region corresponding to the data of the replacement source, and is at least a third region larger than the second region and has a vertex.
- the third region that coincides with the apex of one region may be divided.
- the first region is a spatial region based on the tree structure region A (FIG. 4) in the embodiment
- the second region is a spatial region based on the tree structure region B (FIG. 4) in the embodiment.
- the third region is a spatial region based on the tree structure region B'(in FIG. 4) in the embodiment.
- the subdivision unit defines a third region that includes a first region corresponding to the data at the replacement destination and a second region corresponding to the data at the replacement source, and is at least larger than the second region, and a third region is defined.
- the fourth region which is a fourth region having any of the vertices of the divided regions as the vertices and includes the second region, may be divided.
- the first region is a spatial region based on the tree structure region A (FIG. 5) in the embodiment
- the second region is a spatial region based on the tree structure region B (FIG. 5) in the embodiment.
- the third region is a spatial region based on the tree structure region C (FIG. 5) in the embodiment
- the fourth region is a spatial region based on the tree structure region B'(FIG. 5) in the embodiment.
- the data update device divides the spatial area having the point cloud data, and the divided plurality of spatial areas are probably represented by a tree structure.
- the data update device is the information processing device 10 in the embodiment.
- the data update device includes an acquisition unit and a division unit.
- the acquisition unit is the acquisition unit 101 in the embodiment
- the division unit is the area determination unit 102 in the embodiment.
- the acquisition unit acquires the point cloud data to be divided.
- the point cloud data to be divided is the point cloud data A and the point cloud data B in the embodiment.
- the division portion includes, or includes, a space region related to the point cloud data, a probably tree structure in which at least a part of the first divided space area is represented, and at least a part of the first divided space area.
- a spatial area such that a maybe tree structure, which is contained in at least a part of the first divided spatial area and represents at least a part of the second divided spatial area, is represented by a common maybe tree. Is divided.
- the first divided spatial region is a partial block based on the point cloud data A or the point cloud data B in the embodiment
- the second divided spatial region is the point cloud data B or the point in the embodiment.
- It is a partial block based on the group data A
- the maybe tree structure is an ocree structure in the embodiment
- the common maybe tree is an octree when the positions of the reference coded blocks in the embodiment match each other. It is a tree.
- the information processing apparatus in each of the above-described embodiments and variations thereof can facilitate the processing in the replacement of the coded point cloud data.
- a part or all of the information processing apparatus 10 in each of the above-described embodiments may be realized by a computer.
- a program for realizing this function may be recorded on a computer-readable recording medium, and the program recorded on the recording medium may be read by a computer system and executed.
- the term "computer system” as used herein includes hardware such as an OS and peripheral devices.
- the "computer-readable recording medium” refers to a portable medium such as a flexible disk, a magneto-optical disk, a ROM, or a CD-ROM, and a storage device such as a hard disk built in a computer system.
- a "computer-readable recording medium” is a communication line for transmitting a program via a network such as the Internet or a communication line such as a telephone line, and dynamically holds the program for a short period of time. It may also include a program that holds a program for a certain period of time, such as a volatile memory inside a computer system that is a server or a client in that case. Further, the above program may be for realizing a part of the above-mentioned functions, and may be further realized for realizing the above-mentioned functions in combination with a program already recorded in the computer system. It may be realized by using a programmable logic device such as FPGA (Field Programmable Gate Array).
- FPGA Field Programmable Gate Array
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
- Image Generation (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Processing Or Creating Images (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/021364 WO2021240792A1 (ja) | 2020-05-29 | 2020-05-29 | データ更新方法、データ更新装置及びプログラム |
| US17/927,773 US20230245349A1 (en) | 2020-05-29 | 2020-05-29 | Data update method, data update apparatus and program |
| JP2022527450A JP7469701B2 (ja) | 2020-05-29 | 2020-05-29 | データ更新方法、データ更新装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/021364 WO2021240792A1 (ja) | 2020-05-29 | 2020-05-29 | データ更新方法、データ更新装置及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021240792A1 true WO2021240792A1 (ja) | 2021-12-02 |
Family
ID=78723216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/021364 Ceased WO2021240792A1 (ja) | 2020-05-29 | 2020-05-29 | データ更新方法、データ更新装置及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230245349A1 (https=) |
| JP (1) | JP7469701B2 (https=) |
| WO (1) | WO2021240792A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026053315A1 (ja) * | 2024-09-04 | 2026-03-12 | Ntt株式会社 | 情報処理装置、情報処理方法及びプログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018534881A (ja) * | 2016-01-22 | 2018-11-22 | 三菱電機株式会社 | 点群を圧縮する方法 |
| JP2019120927A (ja) * | 2017-12-29 | 2019-07-22 | バイドゥ オンライン ネットワーク テクノロジー (ベイジン) カンパニー リミテッド | グリッドマップを作成する方法及び装置 |
| US20200021856A1 (en) * | 2018-07-10 | 2020-01-16 | Apple Inc. | Hierarchical point cloud compression |
| WO2020075861A1 (ja) * | 2018-10-12 | 2020-04-16 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
| US20200132818A1 (en) * | 2018-10-25 | 2020-04-30 | Aeye, Inc. | Adaptive control of ladar systems using spatial index of prior ladar return data |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7282532B2 (ja) * | 2019-01-24 | 2023-05-29 | キヤノン株式会社 | 情報処理装置、情報処理方法、データ構造、及びプログラム |
| WO2020241207A1 (ja) * | 2019-05-27 | 2020-12-03 | 日本電気株式会社 | データ管理装置、制御方法、及び記憶媒体 |
| JP7319886B2 (ja) * | 2019-10-07 | 2023-08-02 | 株式会社日立ソリューションズ | 空中線抽出システム及び空中線抽出方法 |
| US20230243925A1 (en) * | 2020-05-29 | 2023-08-03 | Nippon Telegraph And Telephone Corporation | Noise judgment method, noise judgment device and program |
-
2020
- 2020-05-29 US US17/927,773 patent/US20230245349A1/en not_active Abandoned
- 2020-05-29 WO PCT/JP2020/021364 patent/WO2021240792A1/ja not_active Ceased
- 2020-05-29 JP JP2022527450A patent/JP7469701B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018534881A (ja) * | 2016-01-22 | 2018-11-22 | 三菱電機株式会社 | 点群を圧縮する方法 |
| JP2019120927A (ja) * | 2017-12-29 | 2019-07-22 | バイドゥ オンライン ネットワーク テクノロジー (ベイジン) カンパニー リミテッド | グリッドマップを作成する方法及び装置 |
| US20200021856A1 (en) * | 2018-07-10 | 2020-01-16 | Apple Inc. | Hierarchical point cloud compression |
| WO2020075861A1 (ja) * | 2018-10-12 | 2020-04-16 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
| US20200132818A1 (en) * | 2018-10-25 | 2020-04-30 | Aeye, Inc. | Adaptive control of ladar systems using spatial index of prior ladar return data |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026053315A1 (ja) * | 2024-09-04 | 2026-03-12 | Ntt株式会社 | 情報処理装置、情報処理方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230245349A1 (en) | 2023-08-03 |
| JP7469701B2 (ja) | 2024-04-17 |
| JPWO2021240792A1 (https=) | 2021-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113129439B (zh) | 实现协同3d地图数据融合平台的系统和方法及其虚拟世界系统 | |
| Mallios et al. | Scan matching SLAM in underwater environments | |
| EP3427008B1 (en) | Laser scanner with real-time, online ego-motion estimation | |
| Hebel et al. | Change detection in urban areas by object-based analysis and on-the-fly comparison of multi-view ALS data | |
| Wang et al. | Acoustic camera-based pose graph slam for dense 3-d mapping in underwater environments | |
| KR102753370B1 (ko) | 데이터세트 대응관계에 의해 정의된 전세계 좌표 프레임 | |
| KR20220166790A (ko) | 지오메트리 기반 포인트 클라우드 압축에서의 각도 및 방위각 모드들에 대한 레이저 각도들의 코딩 | |
| US10183398B2 (en) | Enhanced system and method for control of robotic devices | |
| EP3656138A1 (en) | Aligning measured signal data with slam localization data and uses thereof | |
| KR20220164702A (ko) | 지오메트리 기반 포인트 클라우드 압축에서의 각도 및 방위각 모드들에 대한 레이저 각도들의 코딩 | |
| JP2024501966A (ja) | ジオメトリコーディングのためのインターおよびイントラ予測のためのハイブリッド木コーディング | |
| TW202207710A (zh) | 用於幾何基礎的點雲壓縮(g-pcc)的經排序的鐳射角度 | |
| CN115661252A (zh) | 一种实时位姿估计方法、装置、电子设备以及存储介质 | |
| EP4446992A1 (en) | Three-dimensional data encoding method, three-dimensional data decoding method, three-dimensional data encoding device, and three-dimensional data decoding device | |
| Jung et al. | Multi-modal sonar mapping of offshore cable lines with an autonomous surface vehicle | |
| Razali et al. | A hybrid point cloud reality capture from terrestrial laser scanning and UAV-photogrammetry | |
| JP7469701B2 (ja) | データ更新方法、データ更新装置及びプログラム | |
| Xanthidis et al. | Towards multi-robot shipwreck mapping | |
| US12293554B2 (en) | Prediction for geometry point cloud compression | |
| TW202232953A (zh) | 用於幾何點雲壓縮的基於模型的預測 | |
| US20250225682A1 (en) | Prediction for geometry point cloud compression | |
| US20240185470A1 (en) | Decoding attribute values in geometry-based point cloud compression | |
| BR122024011216A2 (pt) | Modo azimutal e planar na compressão de nuvem de pontos geométricos | |
| Huang et al. | Three-Dimensional Motion Estimation of Multibeam Imaging Sonar | |
| CN121995526A (zh) | 一种面向水下小目标探测的三维综合底图构建方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20937318 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022527450 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20937318 Country of ref document: EP Kind code of ref document: A1 |