WO2021235464A1 - 情報処理装置、情報処理プログラム、および情報処理方法 - Google Patents
情報処理装置、情報処理プログラム、および情報処理方法 Download PDFInfo
- Publication number
- WO2021235464A1 WO2021235464A1 PCT/JP2021/018895 JP2021018895W WO2021235464A1 WO 2021235464 A1 WO2021235464 A1 WO 2021235464A1 JP 2021018895 W JP2021018895 W JP 2021018895W WO 2021235464 A1 WO2021235464 A1 WO 2021235464A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- waste
- garbage
- information processing
- quality
- label
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F23—COMBUSTION APPARATUS; COMBUSTION PROCESSES
- F23G—CREMATION FURNACES; CONSUMING WASTE PRODUCTS BY COMBUSTION
- F23G5/00—Incineration of waste; Incinerator constructions; Details, accessories or control therefor
- F23G5/50—Control or safety arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/25—Colour; Spectral properties, i.e. comparison of effect of material on the light at two or more different wavelengths or wavelength bands
- G01N21/31—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry
- G01N21/35—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry using infrared light
- G01N21/3554—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry using infrared light for determining moisture content
Definitions
- This disclosure relates to an information processing device, an information processing program, and an information processing method.
- waste with a large amount of water such as kitchen waste, compacted waste located at the bottom of the waste pit, and sludge is low-quality waste with a low calorific value and causes unstable combustion. ing.
- a dust pit is imaged to obtain a spectral image of a water absorption band and a spectral image of a non-absorbent band of water, and the difference in skewness of the brightness value histogram of each spectral image is obtained as water content.
- a method of specifying the water content of the surface layer of waste has been proposed.
- the method using a spectroscopic image requires an infrared camera and an infrared irradiation device in consideration of the amount of light.
- the information processing device is A data acquisition unit that acquires measurement data from a laser-type level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage stored in the garbage pit with an infrared laser.
- An estimation unit that estimates and outputs a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired by the data acquisition unit as an input. To prepare for.
- the computer-readable recording medium non-temporarily records the following information processing program: The information processing program.
- Computer A data acquisition unit that acquires measurement data from a laser-type level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage stored in the garbage pit with an infrared laser.
- An estimation unit that estimates and outputs a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired by the data acquisition unit as an input.
- the information processing method is It is an information processing method executed by a computer.
- a step of estimating and outputting a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired from the laser level sensor as an input. including.
- FIG. 1 is a schematic view showing the configuration of a waste incinerator plant according to an embodiment.
- FIG. 2 is a block diagram showing a configuration of an information processing apparatus according to an embodiment.
- FIG. 3 is a flowchart showing an example of an information processing method by the information processing apparatus according to the embodiment.
- FIG. 4 is a diagram for explaining an example of the operation of the estimation unit.
- FIG. 5 is a schematic view showing the configuration of a waste incinerator plant according to a first modification of the embodiment.
- FIG. 6 is a schematic view showing the configuration of a waste incinerator plant according to a second modification of the embodiment.
- FIG. 7 is a schematic view showing the configuration of a waste incinerator plant according to a third modification of the embodiment.
- the information processing apparatus is A data acquisition unit that acquires measurement data from a laser-type level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage stored in the garbage pit with an infrared laser.
- An estimation unit that estimates and outputs a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired by the data acquisition unit as an input. To prepare for.
- a laser type level sensor that directly measures an infrared laser irradiated by itself as a light source is used, it is not necessary to prepare an infrared camera and an infrared irradiation device, respectively, which is economical. ..
- infrared rays are emitted from the infrared irradiation device as a light source, if the surface of the dust stored in the dust pit is uneven, a shadow will be created on the opposite side of the light source and a blind spot will be created, and the accurate amount of water will be obtained.
- the information processing apparatus is the information processing apparatus according to the first aspect.
- the laser level sensor irradiates the surface of the dust stored in the dust pit with an infrared laser and measures the reflection intensity and height of the surface of the dust.
- both the reflection intensity and the height of the surface of the garbage can be measured at the same time by the laser type level sensor, and it is necessary to separately install a height measuring device in order to measure the height of the surface of the garbage. It is economical because there is no such thing.
- more accurate estimation is possible by using a trained model to estimate the values that indicate the characteristics of the waste or the labels that classify the quality of the waste, using both the reflection intensity and the height of the surface of the waste as inputs. Is.
- the information processing device is the information processing device according to the first or second aspect.
- the estimation unit divides the measurement data on the surface of the waste acquired by the data acquisition unit into a plurality of blocks, inputs the divided measurement data into the trained model, and indicates a value or waste that indicates the characteristics of the waste.
- the label that classifies the quality of is estimated and output in block units.
- the information processing device is the information processing device according to any one of the first to third aspects. Based on the value indicating the characteristics of the waste estimated by the estimation unit or the label that classifies the quality of the waste, an operation instruction is sent to the crane control device that controls the crane that agitates or conveys the waste, or the waste is described. Instruction unit that sends operation instructions to the combustion control device that controls the combustion of Further prepare.
- the information processing device is the information processing device according to any one of the first to fourth aspects.
- the laser level sensor is installed in a crane girder.
- a 2D type laser level sensor that two-dimensionally measures the lower part of the sensor can measure the entire area in the garbage pit by measuring each time as the crane travels. Measurement is possible.
- the information processing device is the information processing device according to any one of the first to fifth aspects.
- the characteristics of the waste are at least one of weight, density, water content, and calorific value.
- the information processing device is the information processing device according to any one of the first to sixth aspects.
- the machine learning algorithm is at least one of the most probable classification method, Boltzmann machine, neural network, support vector machine, Bayesian network, sparse regression, decision tree, statistical estimation using random forest, reinforcement learning, and deep learning. It is one.
- the waste treatment plant according to the eighth aspect of the embodiment is A laser level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage stored in the garbage pit with an infrared laser,
- the information processing device according to any one of the first to seventh aspects and To prepare for.
- the information processing program is Computer, A data acquisition unit that acquires measurement data from a laser-type level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage stored in the garbage pit with an infrared laser. Using a trained model that machine-learns the relationship between the measured data on the surface of the waste acquired in the past by the data acquisition unit and the value indicating the characteristics of the waste or the label that classifies the quality of the waste, An estimation unit that estimates and outputs a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired by the data acquisition unit as an input. To function as.
- the information processing method is It is an information processing method executed by a computer.
- a step of estimating and outputting a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired from the laser level sensor as an input. including.
- the information processing apparatus is The measurement data of the surface of the garbage measured by the laser type level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage stored in the garbage pit with an infrared laser, or the value indicating the characteristics of the garbage. It is equipped with a teacher data generation unit that generates teacher data by associating labels that classify the quality of waste as correct answers.
- the information processing device is the information processing device according to the eleventh aspect. Further, a model construction unit for constructing a trained model by machine learning the teacher data generated by the teacher data generation unit is provided.
- the information processing apparatus is A data acquisition unit that acquires measurement data from a laser-type level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage thrown into the loading hopper with an infrared laser.
- An estimation unit that estimates and outputs a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired by the data acquisition unit as an input. To prepare for.
- a laser type level sensor that directly measures an infrared laser irradiated by itself as a light source is used, it is not necessary to prepare an infrared camera and an infrared irradiation device, respectively, which is economical. ..
- the infrared irradiation device is used as a light source to irradiate infrared rays, if the surface of the dust thrown into the throwing hopper is uneven, a shadow will be created on the opposite side of the light source and a blind spot will be created, and accurate moisture content will be measured.
- the infrared rays emitted by itself as a light source are used. Since a laser level sensor that directly measures the laser is used, there is no blind spot due to the shadow formed on the opposite side of the light source, and the value indicating the characteristics of the waste or the label that classifies the quality of the waste is estimated more accurately. can.
- the information processing apparatus is A data acquisition unit that is installed near the loading door and acquires measurement data from a laser level sensor that measures the reflection intensity of the surface of the garbage by irradiating the surface of the garbage carried out from the garbage loading vehicle, for example, a packer vehicle with an infrared laser.
- a trained model that machine-learns the relationship between the measured data on the surface of the waste acquired in the past by the data acquisition unit and the value indicating the characteristics of the waste or the label that classifies the quality of the waste
- An estimation unit that estimates and outputs a value indicating the characteristics of the waste or a label that classifies the quality of the waste by using the measurement data of the surface of the waste newly acquired by the data acquisition unit as an input. To prepare for.
- a laser type level sensor that directly measures an infrared laser irradiated by itself as a light source is used, it is not necessary to prepare an infrared camera and an infrared irradiation device, respectively, which is economical. ..
- the infrared irradiation device serves as a light source and infrared rays are emitted, if the surface of the garbage carried out from the garbage loading vehicle (for example, a packer vehicle) is uneven, a shadow is formed on the opposite side of the light source and a blind spot is created.
- the information processing apparatus is A data acquisition unit that acquires measurement data from a laser level sensor that measures the reflected intensity of the surface of the incinerated ash by irradiating the surface of the incinerated ash stored in the ash pit with an infrared laser.
- a trained model that machine-learns the relationship between the measured data on the surface of the incinerated ash acquired in the past by the data acquisition unit and the value indicating the characteristics of the incinerated ash or the label that classifies the quality of the incinerated ash.
- an estimation unit that estimates and outputs a value indicating the characteristics of the incineration ash or a label that classifies the quality of the ash by using the measurement data of the surface of the incineration ash newly acquired by the data acquisition unit as an input. To prepare for.
- a laser type level sensor that directly measures an infrared laser irradiated by itself as a light source is used, it is not necessary to prepare an infrared camera and an infrared irradiation device, respectively, which is economical. ..
- infrared rays are emitted from the infrared irradiation device as a light source, if the surface of the incinerated ash stored in the ash pit is uneven, a shadow will be created on the opposite side of the light source and a blind spot will be created, resulting in an accurate amount of water.
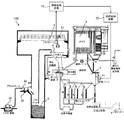
- FIG. 1 is a schematic diagram showing the configuration of a waste incinerator plant 100 according to an embodiment.
- a platform 21 in which a waste loading vehicle (for example, a packer vehicle) 22 for loading waste is stopped and a waste pit in which waste input from the platform 21 is stored are stored.
- a crane 5 that stirs and transports the garbage stored in the garbage pit 3 a loading hopper 4 into which the garbage transported by the crane 5 is loaded, and an incinerator that incinerates the waste loaded from the loading hopper 4.
- 1 is provided with an exhaust heat boiler 2 for recovering exhaust heat from exhaust gas generated in the incinerator 1, and an ash pit 7 for storing incinerated ash.
- the type of the incinerator 1 is not limited to the stoker furnace as shown in FIG.
- the waste incinerator 100 is provided with a crane control device 50 for controlling the operation of the crane 5 and a combustion control device 20 for controlling the combustion of waste in the incinerator 1.
- the garbage carried in while being loaded on the garbage loading vehicle (for example, a packer vehicle) 22 is thrown into the garbage pit 3 from the platform 21 near the loading door and stored in the garbage pit 3.
- the garbage stored in the garbage pit 3 is agitated by the crane 5, is conveyed to the charging hopper 4 by the crane 5, is charged into the incinerator 1 via the charging hopper 4, and is charged into the incinerator 1 inside. Is incinerated and processed.
- the waste incineration plant 100 includes a laser level sensor 6 that irradiates the surface of the waste stored in the waste pit 3 with an infrared laser to perform measurement, and a value or a value indicating the characteristics of the waste.
- An information processing device 10 for estimating a label that classifies the quality of waste is provided.
- the laser level sensor 6 is installed above the dust pit 3 and irradiates the surface of the dust stored in the dust pit 3 with an infrared laser to measure the reflection intensity on the surface of the dust.
- the laser level sensor 6 may irradiate the surface of the dust stored in the dust pit 3 with an infrared laser and simultaneously measure the reflection intensity and height (level) of the surface of the dust.
- the infrared laser means a laser beam whose center wavelength is in the near infrared wavelength range (700 to 2000 nm).
- the laser level sensor 6 preferably has a center wavelength of the infrared laser to be irradiated in the vicinity of 970 nm where a peak appears in the absorption spectrum of water in the near infrared wavelength region, in the vicinity of 1190 nm, in the vicinity of 1450 nm, or in the vicinity of 1940 nm.
- a plurality of laser level sensors 6 may be installed.
- the laser type level sensor 6 a LIDAR (Light Detection And Ringing) type sensor may be used.
- the laser level sensor 6 may be a 2D type that measures the lower part of the sensor two-dimensionally, or may be a 3D type that measures the lower part of the sensor three-dimensionally.
- the laser level sensor 6 is installed in a crane girder (a structure that suspends and moves the crane 5) in the illustrated example, but is not limited to this, and the ceiling or the upper side wall of the garbage pit 3 is not limited to this. May be set to.
- a crane girder a structure that suspends and moves the crane 5
- the ceiling or the upper side wall of the garbage pit 3 is not limited to this. May be set to.
- FIG. 2 is a block diagram showing the configuration of the information processing apparatus 10.
- the information processing device 10 is composed of one or a plurality of computers.
- the information processing apparatus 10 includes a communication unit 11, a control unit 12, and a storage unit 13. Each part is connected to each other so as to be able to communicate with each other via a bus.
- the communication unit 11 is a communication interface between each device of the laser type level sensor 6, the crane control device 50, and the combustion control device 20 and the information processing device 10.
- the communication unit 11 transmits / receives information between the laser level sensor 6, the crane control device 50, the combustion control device 20, and the information processing device 10.
- the storage unit 13 is a non-volatile data storage such as a hard disk or a flash memory. Various data handled by the control unit 12 are stored in the storage unit 13. Further, the storage unit 13 includes teacher data 13b generated by the teacher data generation unit 12d, which will be described later, a trained model 13a constructed by the model construction unit 12e, and measurement data 13c acquired by the data acquisition unit 12a. Is remembered.
- the control unit 12 is a control means for performing various processes of the information processing device 10. As shown in FIG. 2, the control unit 12 includes a data acquisition unit 12a, an estimation unit 12b, an instruction unit 12c, a teacher data generation unit 12d, and a model construction unit 12e. Each of these parts may be realized by the processor in the information processing apparatus 10 executing a predetermined program, or may be implemented by hardware.
- the data acquisition unit 12a acquires the reflection intensity (or reflection intensity and height) of the surface of the dust measured by the laser level sensor 6 as the measurement data 13c.
- the acquired measurement data 13c is stored in the storage unit 13.
- the teacher data generation unit 12d adds a value (1) indicating the characteristics of the dust in the region to the measurement data 13c (measurement data of a plurality of points included in one region) on the surface of the dust measured by the laser level sensor 6.
- the teacher data 13b is generated by associating the two values) or the label (one label) that classifies the quality of the waste as the correct answer.
- the generated teacher data 13b is stored in the storage unit 13.
- the characteristic of the waste may be, for example, at least one of the weight, density, water content, and calorific value of the waste.
- the weight and the density can be specified based on the operation history of the waste incinerator plant 100 when the waste measured by the laser type level sensor 6 is charged into the charging hopper 4.
- the amount of water and the amount of heat generated are specified based on the operation history of the waste incinerator 100 at the time considering the time lag that affects the combustion state after the waste measured by the laser level sensor 6 is charged into the charging hopper 4. obtain.
- the time lag from charging to the charging hopper 4 to affecting the combustion state may be appropriately determined based on an experiment, a simulation, or an operator's experience value.
- the label that classifies the quality of waste may be, for example, a label classified into three stages of ordinary waste, high-quality waste (that is, high-calorie waste), and low-quality waste (that is, low-calorie waste), or two stages. Alternatively, the label may be classified into four or more stages.
- the label that classifies the quality of the waste is specified based on the rule of thumb by the operator visually checking the captured image of the surface of the waste captured at the same time as the time when the measurement by the laser level sensor 6 was performed. obtain.
- the teacher data generation unit 12d divides the surface of the garbage stored in the garbage pit 3 into a plurality of blocks, and divides the surface of the garbage into a block-based measurement data 13c (measurement data of a plurality of points included in the block) of the garbage in the block.
- the teacher data 13b in block units may be generated by associating a value indicating characteristics (one value) or a label (one label) that classifies the quality of waste as a correct answer.
- the model building unit 12e constructs the trained model 13a by machine learning the teacher data 13b generated from 12d in the teacher data generation unit.
- the model building unit 12e may build a trained model 13a by machine learning the teacher data 13b in block units generated from 12d in the teacher data generation unit.
- the constructed trained model 13a (learned parameters for realizing the trained model 13a in the program structure) is stored in the storage unit 13.
- the machine learning algorithm is at least one of the most probable classification method, Boltzmann machine, neural network, support vector machine, Bayesian network, sparse regression, decision tree, statistical estimation using random forest, reinforcement learning, and deep learning. May be.
- the relationship between the input value and the output value is machine-learned by the above-mentioned machine learning algorithm to obtain the input value. Find the parameters that relate the output values.
- the model building unit 12e convolves a plurality of measurement data 13c included in the teacher data 13b of the block.
- the input value of the value indicating the characteristics of the waste corresponding to the block or the label that classifies the quality of the waste is used as the output value, and the relationship between the input value and the output value is determined by a method such as a gradient descent method or an error backpropagation method.
- a method such as a gradient descent method or an error backpropagation method.
- FIG. 4 is a diagram for explaining an example of the operation of the estimation unit 12b.
- the estimation unit 12b inputs the trained model 13a by inputting the measurement data (measurement data of a plurality of points included in one area) on the surface of the garbage newly acquired by the data acquisition unit 12a. It is used to estimate and output a value (one value) indicating the characteristics of the waste in the area or a label (one label) that classifies the quality of the waste.
- a value indicating the characteristics of the data in the block (one value) or a label categorizing the quality of the data (one label) may be estimated and output in block units.
- the estimation unit 12b estimates and outputs a value indicating the characteristics of the waste or a label classifying the quality of the waste for each address by associating each block divided in the waste pit 3 with the address allocation of the waste pit 3. It is also good.
- the instruction unit 12c gives an operation instruction to the crane control device 50 that controls the crane 5 that agitates or conveys the waste based on the value indicating the characteristic of the waste estimated by the estimation unit 12b or the label that classifies the quality of the waste.
- the operation instruction is transmitted to the combustion control device 20 that transmits or controls the combustion of waste.
- the indicating unit 12c determines the value of the waste stored in the waste pit 3 based on the value indicating the characteristic of the waste estimated by the estimation unit 12b or the label for classifying the quality of the waste. Make the characteristics or the quality of the waste uniform in each block, or the characteristics or the quality of the waste to be put into the incinerator 1 this time are close to the characteristics or the quality of the waste put into the incinerator 1 last time. As such, an operation instruction may be transmitted to the crane control device 50.
- the indicator 12c is grabbed by the crane 5 from the waste pit 3 to the input hopper 4 based on the value indicating the characteristics of the waste estimated in block units by the estimation unit 12b or the label for classifying the quality of the waste. Understand the characteristics or quality of the waste that is transported together, and control the combustion of the waste according to the characteristics or quality of the waste that is input together into the incinerator 1 via the input hopper 4 (for example). , Increase / decrease of combustion temperature, increase / decrease of combustion time, increase / decrease of air amount, increase / decrease of dust feed amount, increase / decrease of chemical spray amount) may be transmitted to the combustion control device 20. At this time, the time lag from the time of charging into the incinerator 1 to the time when the combustion state is affected may be appropriately determined based on an experiment, a simulation, and an operator's experience value.
- FIG. 3 is a flowchart showing an example of the information processing method.
- the teacher data generation unit 12d classifies the value indicating the characteristics of the waste or the quality of the waste into the measurement data 13c on the surface of the waste measured in the past by the laser type level sensor 6.
- the teacher data 13b is generated by associating the labels as correct answers (step S11).
- the generated teacher data 13b is stored in the storage unit 13.
- the model building unit 12e constructs the trained model 13a by machine learning the teacher data 13b generated from 12d in the teacher data generation unit (step S12).
- the constructed trained model 13a (learned parameters for realizing the trained model 13a in the program structure) is stored in the storage unit 13.
- the data acquisition unit 12a acquires the reflection intensity (or reflection intensity and height) of the surface of the dust newly measured by the laser level sensor 6 as the measurement data 13c (step S13).
- the acquired measurement data 13c is stored in the storage unit 13.
- the estimation unit 12b divides the measurement data on the surface of the garbage acquired by the data acquisition unit 12a into a plurality of blocks, inputs the measurement data of the divided block units into the trained model 13a, and inputs the measurement data of the divided blocks to the trained model 13a.
- a value indicating characteristics or a label that classifies the quality of waste is estimated and output in block units (step S14).
- the instruction unit 12c transmits an operation instruction to the crane control device 50 or the combustion control device 20 based on the value indicating the characteristics of the waste estimated in block units by the estimation unit 12b or the label for classifying the quality of the waste. (Step S15).
- the method using a spectroscopic image requires an infrared camera and an infrared irradiation device in consideration of the amount of light.
- the image is taken with a fixed camera, if there are cliffs or irregularities (that is, parts that are not exposed to light) in the dust pit, or if something other than dust such as a crane appears in the image. , That part becomes a blind spot, and it may not be possible to measure the amount of water accurately.
- the laser type level sensor 6 that directly measures the infrared laser irradiated by itself as a light source is used, it is necessary to prepare an infrared camera and an infrared irradiation device, respectively. Not economical. Further, when the infrared irradiation device serves as a light source and infrared rays are irradiated, if the surface of the dust stored in the dust pit 3 is uneven, a shadow is formed on the opposite side of the light source and a blind spot is formed, resulting in an accurate water content. In order to prevent shadows from being cast, it is necessary to install multiple infrared irradiation devices around the camera.
- the laser level sensor 6 that directly measures the infrared laser is used, there is no blind spot due to the shadow formed on the opposite side of the light source, and the value indicating the characteristics of the waste or the label that classifies the quality of the waste is better. It can be estimated accurately.
- both the reflection intensity and the height of the surface of the dust can be measured at the same time by the laser type level sensor 6, and a height measuring device is separately installed to measure the height of the surface of the dust. It is economical because there is no need to do it. In addition, more accurate estimation can be made by using the trained model 13a to estimate the values indicating the characteristics of the waste or the labels that classify the quality of the waste, using both the reflection intensity and the height of the surface of the waste as inputs. It is possible.
- the laser level sensor 6 is installed in the crane girder, even if it is a 2D type laser level sensor that two-dimensionally measures the lower part of the sensor, the crane 5 It is possible to measure the entire area in the garbage pit 3 by measuring each time according to the traveling of the crane.
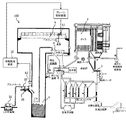
- FIG. 5 is a schematic diagram showing the configuration of the waste incinerator plant 100 according to the first modification.
- the laser type level sensor 61 is installed above the charging hopper 4 and irradiates the surface of the dust charged into the charging hopper 4 with an infrared laser to reflect the reflection intensity (or the surface of the dust) on the surface of the dust. Reflection intensity and height) are measured.
- the data acquisition unit 12a of the information processing apparatus 10 acquires the measurement data of the surface of the dust charged into the charging hopper 4 from the laser type level sensor 61.
- the estimation unit 12b has learned that the relationship between the measurement data on the surface of the waste acquired in the past by the data acquisition unit 12a and the value indicating the characteristics of the waste or the label that classifies the quality of the waste is machine-learned.
- the model 13a the measurement data on the surface of the waste newly acquired by the data acquisition unit 12a is used as an input, and a value indicating the characteristics of the waste or a label classifying the quality of the waste is estimated and output.
- the instruction unit 12c transmits an operation instruction to the combustion control device 20 based on the value indicating the characteristics of the waste estimated by the estimation unit 12b or the label for classifying the quality of the waste. This makes it possible to improve combustion control.
- FIG. 6 is a schematic diagram showing the configuration of the waste incinerator plant 100 according to the second modification.
- the laser type level sensor 62 is installed near the input door, and the surface of the garbage carried out from the garbage loading vehicle (for example, a packer vehicle) 22 is irradiated with an infrared laser to the surface of the garbage. Measure the reflection intensity (or reflection intensity and height).
- the data acquisition unit 12a of the information processing apparatus 10 acquires measurement data on the surface of the garbage carried out from the garbage carry-in vehicle (for example, a packer vehicle) 22 from the laser level sensor 62.
- the estimation unit 12b has learned that the relationship between the measurement data on the surface of the waste acquired in the past by the data acquisition unit 12a and the value indicating the characteristics of the waste or the label that classifies the quality of the waste is machine-learned.
- the model 13a the measurement data on the surface of the waste newly acquired by the data acquisition unit 12a is used as an input, and a value indicating the characteristics of the waste or a label classifying the quality of the waste is estimated and output.
- the instruction unit 12c transmits an operation instruction to the crane control device 50 based on a value indicating the characteristics of the waste estimated by the estimation unit 12b or a label for classifying the quality of the waste. This makes it possible to enhance the pit work in the waste pit 3. It can also be used to settle processing consignment costs according to the quality of waste (that is, the amount of water, etc.).
- FIG. 7 is a schematic diagram showing the configuration of the waste incinerator plant 100 according to the third modification.
- the laser level sensor 63 is installed above the ash pit 7, and the surface of the incinerator ash stored in the ash pit 7 is irradiated with an infrared laser to reflect the surface of the incinerator ash. Measure the intensity (or reflection intensity and height).
- the data acquisition unit 12a of the information processing apparatus 10 acquires measurement data on the surface of the incinerated ash stored in the ash pit 7 from the laser level sensor 63.
- the estimation unit 12b machine-learns the relationship between the measurement data on the surface of the incinerated ash acquired in the past by the data acquisition unit 12a and the value indicating the characteristics of the incinerated ash or the label that classifies the quality of the incinerated ash.
- the trained model 13a that has been trained, the measurement data of the surface of the incinerated ash newly acquired by the data acquisition unit 12a is used as an input to estimate the value indicating the characteristics of the incinerated ash or the label that classifies the quality of the incinerated ash. And output.
- the instruction unit 12c operates to an ash transport crane control device (not shown) installed in the ash pit 7 based on a value indicating the characteristics of the incinerator estimated by the estimation unit 12b or a label for classifying the quality of the incinerator ash. Send instructions. This makes it possible to enhance the pit work in the ash pit 7.
- the indicator 12c controls the amount of water sprayed in an ash extruder or ash unloading device (not shown) based on the value indicating the characteristics of the incinerator estimated by the estimation unit 12b or the label for classifying the quality of the incinerator. You may.
- the value indicating the characteristics of the incinerator ash may be, for example, the water content (moisture content).
- the label for classifying the quality of incinerator ash may be, for example, a label classified into two stages of high water content and low water content, or a label classified into three or more stages.
- the mode in which the laser level sensor is installed in the waste incineration plant has been described, but the laser type is described not only in the waste incineration plant but also on the ceiling of the fuel storage facility of, for example, a woody biomass power plant. Even if a level sensor is installed and the information processing device is configured to distinguish which part of the fuel is wet or dry based on the measurement data of the laser type level sensor and select the fuel to be input. good.
- a laser level sensor is installed on the ceiling of the fuel storage facility of a woody biomass power plant, and the surface of the fuel stored in the fuel storage facility is irradiated with an infrared laser to irradiate the surface of the fuel with an infrared laser to reflect the intensity (or) of the surface of the fuel. Reflection intensity and height) are measured.
- the data acquisition unit 12a of the information processing apparatus 10 acquires the measurement data of the surface of the fuel stored in the fuel storage facility from the laser type level sensor.
- the estimation unit 12b has learned that the relationship between the measured data on the surface of the fuel acquired in the past by the data acquisition unit 12a and the value indicating the characteristics of the fuel or the label that classifies the quality of the fuel is machine-learned.
- the model 13a the measurement data on the surface of the fuel newly acquired by the data acquisition unit 12a is used as an input, and a value indicating the characteristics of the fuel or a label classifying the quality of the fuel is estimated and output.
- the indicator 12c indicates which part of the fuel to the fuel transport means (not shown) installed in the fuel storage facility based on the value indicating the fuel characteristic estimated by the estimation unit 12b or the label for classifying the quality of the incinerator ash. Send an operation instruction as to whether or not to input.
- a part of the processing of the control unit 12 may be performed not on the information processing device 10 but on a cloud server different from the information processing device 10.
- a part of the storage unit 13 may be on a cloud server different from the information processing device 10 instead of the information processing device 10.
- the processing of the teacher data generation unit 12d may be executed on the cloud server to generate the teacher data 13b, or the processing of the model construction unit 12e may be executed on the cloud server to construct the trained model 13a. May be good.
- the processing of the estimation unit 12b may be executed on the cloud server by using the trained model 13a constructed on the cloud server, or the information processing apparatus 10 may perform the trained model 13a (learned parameter) on the cloud server.
- the processing of the estimation unit 12b may be executed by downloading from the cloud server and using this in the information processing apparatus 10.
- the control unit 12 may periodically monitor the estimation result of the estimation unit 12b and determine whether or not the trained model 13a needs to be reviewed and updated.
- control unit 12 determines whether the estimation result of the estimation unit 12b is normal or abnormal using the edge server, and when an abnormality is detected, the measurement data and the estimation result have a problem in the operation of the incinerator 1. To judge. When it is determined that there is an operational problem, the teacher data generation unit 12d newly assigns the teacher data 13b based on the label that classifies the quality of the waste reassigned by the skilled operator to the measurement data in which the abnormality is detected. Is prepared, and the model construction unit 12e learns the newly prepared teacher data 13b to generate the trained model 13a.
- the information processing apparatus 10 may be composed of one or a plurality of computers, but a program for realizing the information processing apparatus 10 on one or a plurality of computers and the program are non-temporarily provided.
- the recorded recording medium is also subject to protection in this case.
Landscapes
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Health & Medical Sciences (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Incineration Of Waste (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020089568A JP7535874B2 (ja) | 2020-05-22 | 2020-05-22 | 情報処理装置、情報処理プログラム、および情報処理方法 |
| JP2020-089568 | 2020-05-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021235464A1 true WO2021235464A1 (ja) | 2021-11-25 |
Family
ID=78707818
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/018895 Ceased WO2021235464A1 (ja) | 2020-05-22 | 2021-05-19 | 情報処理装置、情報処理プログラム、および情報処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7535874B2 (https=) |
| WO (1) | WO2021235464A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114445637A (zh) * | 2021-12-28 | 2022-05-06 | 盛视科技股份有限公司 | 垃圾分类模型训练方法、分类方法、装置及可读存储介质 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7616986B2 (ja) * | 2021-12-28 | 2025-01-17 | カナデビア株式会社 | 情報処理装置、制御内容決定方法、ごみ調整方法、制御内容予測モデルの生成方法、強化学習モデルの生成方法、制御内容決定プログラム、およびごみ調整プログラム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1048900A1 (de) * | 1999-04-28 | 2000-11-02 | ORFEUS Combustion Engineering GmbH | Verfahren und Vorrichtung zum Steuern der Verbrennung von Brennstoff mit variablem Heizwert |
| JP2006046680A (ja) * | 2004-07-30 | 2006-02-16 | Kawasaki Heavy Ind Ltd | 廃棄物処理設備の前処理装置および方法とそのプログラム |
| JP2008064361A (ja) * | 2006-09-06 | 2008-03-21 | Mitsubishi Heavy Ind Ltd | ストーカ式焼却炉及びその燃焼制御方法 |
| WO2019026551A1 (ja) * | 2017-07-31 | 2019-02-07 | 荏原環境プラント株式会社 | 廃棄物の質を推定する装置、システム、プログラム、方法、及びデータ構造 |
| JP2019148409A (ja) * | 2018-02-27 | 2019-09-05 | 株式会社タクマ | ごみの混合度評価システム |
| WO2020040110A1 (ja) * | 2018-08-23 | 2020-02-27 | 荏原環境プラント株式会社 | 情報処理装置、情報処理プログラム、および情報処理方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09178141A (ja) * | 1995-12-21 | 1997-07-11 | Kubota Corp | ゴミピットのクレーン制御装置 |
| JP6624451B2 (ja) | 2016-03-30 | 2019-12-25 | Jfeエンジニアリング株式会社 | 廃棄物処理炉装置 |
-
2020
- 2020-05-22 JP JP2020089568A patent/JP7535874B2/ja active Active
-
2021
- 2021-05-19 WO PCT/JP2021/018895 patent/WO2021235464A1/ja not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1048900A1 (de) * | 1999-04-28 | 2000-11-02 | ORFEUS Combustion Engineering GmbH | Verfahren und Vorrichtung zum Steuern der Verbrennung von Brennstoff mit variablem Heizwert |
| JP2006046680A (ja) * | 2004-07-30 | 2006-02-16 | Kawasaki Heavy Ind Ltd | 廃棄物処理設備の前処理装置および方法とそのプログラム |
| JP2008064361A (ja) * | 2006-09-06 | 2008-03-21 | Mitsubishi Heavy Ind Ltd | ストーカ式焼却炉及びその燃焼制御方法 |
| WO2019026551A1 (ja) * | 2017-07-31 | 2019-02-07 | 荏原環境プラント株式会社 | 廃棄物の質を推定する装置、システム、プログラム、方法、及びデータ構造 |
| JP2019148409A (ja) * | 2018-02-27 | 2019-09-05 | 株式会社タクマ | ごみの混合度評価システム |
| WO2020040110A1 (ja) * | 2018-08-23 | 2020-02-27 | 荏原環境プラント株式会社 | 情報処理装置、情報処理プログラム、および情報処理方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114445637A (zh) * | 2021-12-28 | 2022-05-06 | 盛视科技股份有限公司 | 垃圾分类模型训练方法、分类方法、装置及可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7535874B2 (ja) | 2024-08-19 |
| JP2021183891A (ja) | 2021-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2733556C1 (ru) | Устройство, система, запоминающее устройство, способ и структура данных для оценки состава отходов | |
| WO2021235464A1 (ja) | 情報処理装置、情報処理プログラム、および情報処理方法 | |
| JP7308016B2 (ja) | ごみ質推定システム及び方法、並びに、ごみ貯蔵設備 | |
| JP2024001337A (ja) | 情報処理装置、情報処理方法、および情報処理プログラム | |
| JP7391286B2 (ja) | 情報処理装置、情報処理方法、および情報処理プログラム | |
| KR20210038403A (ko) | 발열량 추정 방법, 발열량 추정 장치 및 쓰레기 저장 설비 | |
| WO2020040110A1 (ja) | 情報処理装置、情報処理プログラム、および情報処理方法 | |
| CN117836560A (zh) | 信息处理方法、信息处理装置及信息处理程序 | |
| JP7459582B2 (ja) | 管理装置、管理方法、およびプログラム | |
| JP6977119B1 (ja) | 推定システムおよび制御システム | |
| JP2021183891A5 (https=) | ||
| Liukkonen et al. | Adaptive soft sensor for fluidized bed quality: Applications to combustion of biomass | |
| CN120507995A (zh) | 一种垃圾处理发电的智能优化控制方法及电子设备 | |
| US20250299017A1 (en) | Method for Obtaining Domain-Informed ML/AI Model, Method for Analysing and/or Predicting Drive System and/or Drive Apparatus Behavior, Control Apparatus, Drive Application System, and Computer Program Product | |
| JPWO2020036082A1 (ja) | 検査装置、検査方法および検査プログラム | |
| JP7613327B2 (ja) | 情報処理装置、情報処理方法、プログラム、焼却管理システム、および焼却管理システムの運転方法 | |
| Young et al. | Multiobjective optimization of a port-of-entry inspection policy | |
| Carraturo et al. | An Ontology for Defect Detection in Metal Additive Manufacturing | |
| TW202403235A (zh) | 資訊處理裝置、資訊處理方法、及資訊處理程式 | |
| JP6899766B2 (ja) | 情報処理装置、および情報処理方法 | |
| CN118020085A (zh) | 食品污染预测装置、推理装置、机器学习装置、食品污染预测方法、推理方法及机器学习方法 | |
| CN115389714A (zh) | 垃圾焚烧产生so2和hcl的原始排放浓度预测方法、系统设备 | |
| JP7649190B2 (ja) | 予測装置、予測方法、予測プログラム、施設制御装置、施設制御方法、および制御プログラム | |
| JP7647461B2 (ja) | 情報処理装置、制御装置、プログラム、廃棄物処理施設、および廃棄物処理施設の運転方法 | |
| US20250073780A1 (en) | Sensor fusion with eddy current sensing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21808830 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21808830 Country of ref document: EP Kind code of ref document: A1 |