WO2021166320A1 - 移動体の異常状態監視システム - Google Patents
移動体の異常状態監視システム Download PDFInfo
- Publication number
- WO2021166320A1 WO2021166320A1 PCT/JP2020/038633 JP2020038633W WO2021166320A1 WO 2021166320 A1 WO2021166320 A1 WO 2021166320A1 JP 2020038633 W JP2020038633 W JP 2020038633W WO 2021166320 A1 WO2021166320 A1 WO 2021166320A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- data
- moving body
- management device
- machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0027—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement involving a plurality of vehicles, e.g. fleet or convoy travelling
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/205—Remotely operated machines, e.g. unmanned vehicles
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2054—Fleet management
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/267—Diagnosing or detecting failure of vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B23/00—Testing or monitoring of control systems or parts thereof
- G05B23/02—Electric testing or monitoring
Definitions
- the present invention relates to an abnormal state monitoring system for a mobile body that can appropriately process information collected from a plurality of moving bodies.
- Patent Document 1 collects operation data of construction machines, which can efficiently collect operation data indicating failures and signs of construction machines by reducing the amount of stored information collected and accumulated without deteriorating the quality of information leading to maintenance. A device has been proposed.
- Patent Document 1 is a construction machine operation data collection device that is mounted on a construction machine and receives operation data composed of measurement values of a plurality of sensors indicating the operation status of the construction machine and stores the operation data in the operation data storage unit.
- the normal reference value storage unit that stores the normal reference value of each sensor in the operation data
- the deviation degree calculation unit that calculates the deviation degree of each sensor with respect to the normal reference value
- the deviation degree of each sensor calculated by the deviation degree calculation unit It is equipped with a storage sensor item dynamic identification unit that dynamically changes the sensor item of the operation data stored in the operation data storage unit according to the size of the storage sensor item, and the storage sensor item dynamic identification unit is the normal reference value of each sensor. It has a feature that the magnitude of the degree of divergence can be compared with each other, and the sensor items of the sensor having the largest degree of divergence can be selected in order and stored in the operation data storage unit.
- the present invention has been made to solve the above-mentioned problems, and provides an abnormal state monitoring system for a mobile body capable of appropriately processing information collected from a plurality of moving bodies (for example, construction machinery, field workers).
- the purpose is to do.
- the abnormal state monitoring system for a moving body of the present invention includes a management device that transmits instruction information to the moving body based on non-stationary information of the abnormal state transmitted from a plurality of moving bodies, and a moving body.
- a mobile body-side device provided on the body is provided, and the mobile body-side device determines whether or not the sensor information is abnormal, the communication means for communicating with the management device, the sensor information acquisition means for acquiring the sensor information of a plurality of sensors, and the sensor information.
- Control to create flag data including a flag indicating the abnormality level and status information indicating the abnormality state when the abnormality detecting means to be performed and the abnormality detecting means determine to be abnormal, and transmit the flag data to the management device. It is characterized by having means and. Other aspects of the present invention will be described in embodiments described below.
- an abnormal state monitoring system for a mobile body that can appropriately process information collected from a plurality of moving bodies.
- FIG. 1 is a diagram showing an outline of an abnormal state monitoring system 100 for a moving body according to an embodiment.
- FIG. 2 is a diagram showing a configuration of an abnormal state monitoring system for a moving body.
- the abnormal state monitoring system 100 for a mobile body is a management device 30 (remote) that monitors an unsteady state from a large number of construction machines operating in various parts of the world or a plurality of mobile bodies composed of people working at the construction site.
- a monitoring center) and a moving body side device 10 provided on the moving body are provided.
- the moving body side device 10 transmits the flag data 21 indicating the unsteady state described later to the management device 30 of the remote monitoring center.
- the management device 30 analyzes the flag data 21 and requests the moving body side device 10 for necessary sensing data.
- the moving body side device 10 transmits the requested sensing data to the management device 30, and the management device 30 transmits instruction information to the moving body side device 10 based on the flag data and the sensing data.
- the abnormal state monitoring system 100 for a moving body is provided with M sensors and N locations, and uses P type sensor information.
- M, N, and P mean the sensors provided in the unmanned construction machine shown in FIG. 1 and the sensors provided in the vicinity thereof.
- M, N, and P mean the sensors provided in the moving body side device 10 and the sensors provided around the sensors.
- the P type sensor include an image distance sensor, a voice sensor, a vibration sensor, a temperature sensor, and the like.
- the smart device possessed by the person may be equipped with sensors.
- an unmanned construction machine that autonomously travels at a construction site will be described.
- the unmanned construction machine constantly senses changes in the surrounding environment and changes in the self-state with multiple sensors while proceeding according to the programmed plan, and the output result from each sensor is set as a threshold value.
- the output result from each sensor is set as a threshold value.
- the state transitions from the steady state to the unsteady state.
- the flag data 21 is generated based on the output result from each sensor. Further, the generated flag data 21 is notified to the management device 30 via the network NW. After notifying the flag data 21, it waits for the reception of the instruction from the management device 30.
- the instructions from the management device 30 include an instruction by the process S1 and an instruction by the process S2, which will be described later.
- the unmanned construction machine that runs autonomously at the construction site was explained as a moving body, the same applies to the case of field workers.
- the field worker it is preferable that the field worker has (wears), a smart device, a smart watch, or the like having various sensors, a processing unit, or the like as the moving body side device 10.
- the management device 30 receives the flag data 21 as the process S1, it gives an instruction to acquire the necessary sensing data.
- the management device 30 receives the sensing data as the process S2
- the management device 30 analyzes the flag data and the sensing data, and gives the best response instruction to the unmanned construction machine at the construction site via the network NW according to the analysis result. Will be issued.
- the mobile body side device 10 has a processing unit 11 for monitoring the unsteady state of the mobile body, a storage unit 20, an external sensor 27, a communication unit 25 for communicating with the management device 30, and a plurality of internal sensors 26.
- the processing unit 11 includes a sensor information acquisition unit 12 (sensor information acquisition means) that acquires sensor information of a plurality of sensors 26 and 27, and an abnormality detection unit 13 (abnormality detection) that determines whether or not the sensor information is abnormal. Means) and when the abnormality detecting means determines that the abnormality is abnormal, the flag data 21 is created as the flag data 21 including the flag indicating the abnormality level and the state information indicating the abnormal state, and the flag data 21 is transmitted to the management device 30. It has an abnormality processing unit 14 (control means), a flag generation unit 15 for generating a flag, and the like.
- the storage unit 20 stores flag data 21, first aid determination table 22, and the like.
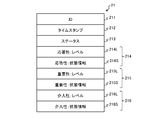
- FIG. 3 is a diagram showing an example of the data structure of the flag data 21.
- the flag data 21 includes an ID 211 for identifying the moving body side device 10 that generated the flag and the notification event, a time stamp 212 indicating the time when the flag data was generated, a status 213 indicating a steady / unsteady state, and an abnormal value from the sensor. It consists of responsiveness information 214, importance information 215, and intervening information 216 determined by.
- the responsiveness information 214, the importance information 215, and the interventional information 216 are composed of the flag levels of the respective information, levels 214L, 215L, and 216L, and the state information 214S, 215S, and 216S indicating the state of the level. There is.
- the responsiveness information 214 is information for determining whether or not there is an abnormality in a person (field worker) or whether or not it affects the person. If it is determined that there is an abnormality in a person or an effect on a person, the responsiveness level is set to "1". Next, it is determined whether or not the change in the surrounding environment or the state of the machine is rapid. If it is determined to be early, the responsiveness level is set to "2". In other cases, the responsiveness level is set to "3".
- Importance information 215 is information for determining whether or not it has a great influence on the surrounding environment. If it is judged that the influence is large, the importance level is set to "1". Next, it is determined whether or not it will lead to damage to unmanned construction machinery and equipment used. If it is determined to cause damage, the responsiveness level is set to "2". In other cases, the importance level is set to "3".
- Intervention information 216 is information for determining whether or not expert intervention is necessary even in remote instructions. If it is determined that expert intervention is required, the intervention level is set to "1". Next, it is determined whether artificial intelligence intervention is necessary. If deemed necessary, the intervention level is set to "2". Otherwise, the intervention level is set to "3".
- the management device 30 includes a processing unit 31, a storage unit 40, an input unit 45, a display unit 46, and a communication unit 47.
- the processing unit 31 has a priority determination unit 32 that determines the priority when receiving a plurality of flag data, a mobile body state monitoring unit 33 that monitors the state of the moving body and the surrounding environment, and the processing unit 31 for grasping the state of the moving body. It has a sensing data selection unit 34 that generates instruction information of the sensing data of the above, a sensing data analysis unit 35 that generates a correspondence instruction to a moving body, and the like.
- the display unit 46 is a display or the like, and displays the execution status and execution result of the process by the management device 30.
- the input unit 45 is a device for inputting an instruction to a computer such as a keyboard or a mouse, and inputs an instruction such as starting a program.
- the processing unit 31 is a central processing unit (CPU) and executes various programs stored in the storage unit 40 and the like.
- the communication unit 47 exchanges various data and commands with other devices via the network NW.
- the storage unit 40 contains an acquisition data determination table 41 to be acquired based on the flag data 21 from the mobile side device 10 used for the process S1, and an instruction determination table for giving a response instruction to the mobile side device 10 used for the process S2. 42, the flag data 21, the instruction content 43 based on the sensing data, the notification data 44 to the moving body, and the like are stored.
- FIG. 4 is a diagram showing an example of the data structure of the notification data 44 from the management device 30.
- the notification data 44 has a moving body side device 10 that generated the flag, an ID 441 for identifying the notification event, a time stamp 442 that is the time when the notification was generated, an instruction content 443, and the like.
- FIG. 5 is a diagram showing an example of the acquisition data determination table 41 in the process S1.
- the acquired data determination table 41 includes flag levels, state information, acquired data, and the like.
- the flag levels are the levels 214L, 215L, and 216L shown in FIG. 3, and the state information is the state information 214S, 215S, and 216S shown in FIG.
- the position coordinates / movement lines of the person, the image data of the person, the distance data of the person, and the temperature around the person are notified. Acquires humidity, machine position coordinates / movement lines, surrounding image data, surrounding distance data, ambient temperature and humidity, rainfall, machine sound, and machine temperature.
- intervention level of line 419 is "3" and the information that only first aid is given as the state information is notified, it is not necessary to acquire the sensing data.
- the level may be "1" and there may be a plurality of state information.
- FIG. 6 is a diagram showing an example of the instruction determination table 42 of the process S2.
- the instruction determination table 42 includes flag levels, state information, determination criteria, and the like.
- the flag levels are the levels 214L, 215L, and 216L shown in FIG. 3, and the state information is the state information 214S, 215S, and 216S shown in FIG.
- Judgment criteria are: if the degree of fatigue is 80% or more, a break of 1 hour or more is required. If the posture is crouched or collapsed, rescue is required. , A break of 1 hour or more is required, and if the temperature / humidity is 39 degrees / 90% for 1 hour, a break of 0.5 hours is required. Note that h is a unit of time.
- the closest prediction is made from the position coordinates / flow line of the person and the position coordinates / flow line of the machine. The distance and the estimated closest approach time are determined.
- the judgment standard is to stop the machine if the closest approach distance is 3 m / predicted time of 15 s, otherwise to give an alarm to a person, reduce the moving speed of the machine, and change the route.
- the responsiveness level of line 423 is "3" and the information of guerrilla rainstorm is notified as the state information, it is determined whether or not the activity can be continued from the rainfall amount and the rainfall status of the surrounding image data.
- the criterion is that if 500 mm / h continues for 0.5 h, the machine is stopped, and if 500 mm / h continues for 1 hour, the machine is retracted, based on the results of the rainfall meter and image recognition.
- the closest approach distance is determined from the position coordinates / flow line of the person and the position coordinates / flow line of the machine. Whether or not to save is determined from the surrounding image data and the surrounding distance data. The judgment criterion is that if the closest distance is 3 m, the machine is stopped, and if an unrecognized object or an object that should not be approached is detected as a result of image recognition of surrounding image data and distance data, it is judged that evacuation is necessary. do.
- a specific frequency that can predict the failure or deterioration of parts is detected from the sound of the machine, and the temperature is higher than expected. Detects where the temperature has reached the high temperature. As a criterion, if a specific frequency is detected as a result of machine sound analysis and continues for 1 minute, the machine is stopped, and as a result of temperature analysis, a part of 90 degrees or more is detected and continues for 1 minute. If so, stop the machine.
- a specific frequency is detected as a result of machine sound analysis, it is judged that maintenance is required, and if a part of 90 degrees or more is detected as a result of machine temperature analysis, it is judged that maintenance is required. If the continuous operation time is 50 hours or more, it is determined that maintenance is required, and the movement required time and the remaining operation time are calculated from the self-position, the surrounding image, and the distance data.
- the position coordinates / movement lines of the person, the image data of the person, the distance data of the person, and the temperature around the person are notified.
- Multiple abnormalities have occurred by experts based on humidity, machine position coordinates / movement lines, surrounding image data, surrounding distance data, ambient temperature and humidity, rainfall, machine noise, and machine temperature. Determine how to deal with the case. For example, it is a priority determination when a plurality of flags are generated at the same time, and an evacuation instruction when a person / machine evacuation destination / movement destination conflicts.
- the artificial intelligence When the intervention level of line 428 is "2" and the information that the artificial intelligence instruction is required is notified as the state information, the artificial intelligence performs emergency processing based on the same data group as when the intervention level is "1". Determine from the database how to deal with a single error that is not included in the list. For example, as a result of image recognition, it is a countermeasure method when an unknown object not on the list is recognized or when an abnormal sound having a frequency not on the list is detected.
- the effects of the abnormal state monitoring system 100 for mobile objects are as follows. (1) Since the size of the notification data (flag data 21 (see FIG. 3)) from the mobile device 10 to the management device 30 is small, even if a large number of notifications are simultaneously generated from a large number of bases, the management device 30 is used in real time. Can be notified to. (2) Since the urgency and importance are determined before the notification from the moving body side device 10 to the management device 30, the processing burden on the management device 30 side is small. In addition, the management device 30 can easily determine the priority and can handle a large number of moving objects.
- the moving body side device 10 When the moving body side device 10 detects the abnormal data, the moving body first executes the first aid measure, so that the response delay does not occur. (4) By combining sensing by a large number of sensors, the situation at the site can be accurately grasped. For example, in human sensing, by combining coordinates (position) with posture, movement, and vital information, the state of field workers (health, fatigue, safety of surrounding machines, and comfort of the work environment) can be achieved more accurately. ) Can be grasped. (5) By analyzing the detailed sensing data with the management device 30, it is possible to create an improvement measure with higher accuracy than the analysis with the moving body side device 10.
- FIG. 7 is a flowchart showing the overall processing of the abnormal state monitoring system 100 for the mobile body. This will be described with reference to FIGS. 2 and 3 as appropriate.
- the abnormality detection unit 13 of the moving body side device 10 determines whether or not the sensor information acquired by the sensor information acquisition unit 12 is non-stationary (whether or not it is abnormal) (process S10), and if it is not non-stationary. (Process S10, No), the process returns to process S10, and if it is unsteady (process S10, Yes), an emergency measure is executed (process S11).
- the first aid measures correspond based on the first aid determination table 22 stored in the storage unit 20.
- the abnormality processing unit 14 obtains the responsiveness information 214, the importance information 215, and the intervening information 216 shown in FIG. 3 via the flag generation unit 15 (process S13: flag generation process).
- the abnormality processing unit 14 notifies the management device 30 of the flag data 21 (see FIG. 3) (process S14).
- the abnormality processing unit 14 of the mobile body side device 10 receives an instruction from the management device 30 (process S15)
- the abnormality processing unit 14 executes the sensing data collection instruction process (process S16). Then, the abnormality processing unit 14 transmits the sensing data to the management device 30 (process S17).
- the abnormality processing unit 14 of the mobile body side device 10 receives an instruction from the management device 30 (process S18), the abnormality processing unit 14 executes the instruction process (process S19) and returns to the process S10.
- the mobile body condition monitoring unit 33 of the management device 30 receives the flag data 21 from the mobile body side device 10 (process S31), the item of data to be acquired shown in FIG. 5 via the sensing data selection unit 34. (Process S32), and instruct the mobile device 10 to acquire sensing data (Process S33).
- the mobile body condition monitoring unit 33 of the management device 30 receives the sensing data from the mobile body side device 10 (processing S34)
- the mobile body condition monitoring unit 33 issues a response instruction according to the determination criteria shown in FIG. 6 via the sensing data analysis unit 35.
- a corresponding instruction is given to the mobile body side device 10 (process S36).
- FIG. 8 is a flowchart showing a flag generation process (process S13) in the moving body side device 10. This will be described with reference to FIGS. 2 and 3 as appropriate.
- the flag generation unit 15 of the moving body side device 10 determines whether or not the person (worker) is abnormal or affects the person (process S131), and determines that the person is abnormal or has an influence on the person. (Process S131, Yes), the responsiveness level 214L is set to "1", the state information 214S is set (process S133), and the process proceeds to process S136. If it is determined that there is no abnormality in the person or no influence on the person (processes S131 and No), the flag generation unit 15 proceeds to the process S132.
- the flag generation unit 15 determines whether or not the change in the surrounding environment or the state of the machine is fast (change is large) (process S132), and if it is determined to be fast (process S132, Yes). , The responsiveness level 214L is set to "2", the state information 214S is set (process S134), and the process proceeds to process S136. If the change is not fast, in other cases (process S132, No), the flag generation unit 15 sets the responsiveness level 214L to "3", sets the state information 214S (process S135), and processes 136. Proceed to.
- the flag generation unit 15 determines whether or not it has a large influence on the surrounding environment (whether it destroys the environment) (process S136), and if it is determined that the influence is large (process S136, Yes), the importance level 215L. Is set to "1", the state information 215S is set (process S138), and the process proceeds to process S141. If it is not determined that the influence is large (process S136, No), the flag generation unit 15 proceeds to process S137.
- the flag generation unit 15 determines whether or not it leads to damage to the construction machine or the equipment used (process S137), and if it is determined to cause damage (process S137, Yes), it is of importance.
- the level 215L is set to "2"
- the state information 215S is set (process S139), and the process proceeds to process S141.
- the importance level 215L is set to "3”
- the state information 215S is set (process S140), and the process proceeds to process S141.
- the flag generation unit 15 determines whether or not it is OK only in the emergency processing (process S141), and if it is determined that it is OK only in the emergency processing (processing S141, Yes), the intervention level 216L is set to "" 3 ”is set, the state information 216S is set (process S143), and the flag generation process (process S13) is terminated. If the emergency process alone is not OK (processes S141 and No), the flag generation unit 15 proceeds to process S142.
- the flag generation unit 15 determines whether or not it is necessary to respond by artificial intelligence (process S142), and if it is determined that it is necessary to respond by artificial intelligence (process S142, Yes), the intervention level 216L is set to "2". Is set, the state information 216S is set (process S144), and the flag generation process (process S13) is terminated. If it is not necessary to deal with it by artificial intelligence (process S142, No), the flag generation unit 15 sets the intervention level 216L to "1", sets the state information 216S (process S145), and sets the flag generation process (process S145). Process S13) is terminated.
- FIG. 9 is a flowchart showing a priority determination process (process S32) of a plurality of flags on the management server. This will be described with reference to FIGS. 2 and 3 as appropriate.
- the priority determination process is more specifically shown for the processes S31 to S36 of the mobile body condition monitoring unit 33 shown in FIG. 7.
- the processes S31 and S34 of FIG. 7 correspond to the processes S328 of FIG. 9, and the processes S32 and S35 of FIG. 7 correspond to the processes S327 of FIG. Further, the processes S33 and S36 of FIG. 7 correspond to the processes S327 of FIG.
- the priority determination unit 32 of the management device 30 determines whether or not the reception queue sent from the moving body in each place remains (process S321), and if there is a reception queue (process S321, Yes), the flag data.
- a response deadline is generated from the time stamp 212 of 21 and the responsiveness level 214L (process S322), and the process returns to process S321.
- the priority determination unit 32 proceeds to process S323.
- the priority determination unit 32 sorts the receive queues in order of earliest response deadline (process S323), determines whether or not there is a remaining unprocessed receive queue (process S324), and has a remaining receive queue. If (process S324, Yes), the process proceeds to process S325, and if there is no receive queue (process S324, No), the process proceeds to process S328.
- the priority determination unit 32 takes out the head of the reception queue (process S325), analyzes the process S1 or process S2 (process S326), transmits instruction information to the moving body (process S327), and processes. Return to S324.
- the priority determination unit 32 determines whether or not the flag data 21 is received from the moving body side device 10, and if the flag data 21 is not received (process S328, No), returns to the process S328. , When the flag data 21 is received (process S328, Yes), the process returns to process S321.
- FIG. 10 is a flowchart showing a sensing data selection process (process S34) of process S1 in the management device 30. Refer to FIGS. 2 and 3 as appropriate.
- the sensing data selection unit 34 selects the sensing data required for analysis based on the acquired data determination table 41.
- the sensing data selection unit 34 determines whether or not the responsiveness level is "1" (process S341), and is notified that the responsiveness level is "1" and that the posture is slowly walking and the complexion is pale as state information. In this case (process S341, Yes), the position coordinates / movement lines of the person, the image data of the person, the distance data of the person, and the temperature and humidity around the person are selected as the acquired data (process S343). Proceed to process S346. When the responsiveness level is not "1" (processes S341 and No), the sensing data selection unit 34 proceeds to process S342.
- the sensing data selection unit 34 determines whether or not the responsiveness level is "2" (process S342), and when the responsiveness level is "2" and the information that the machine and the person are suddenly approaching is notified as the state information. (Process S342, Yes), the position coordinates / movement line of the person and the position coordinates / movement line of the machine are selected as the acquired data (process S344), and the process proceeds to process S346. When the responsiveness level is not "2" (process S342, No), the sensing data selection unit 34 proceeds to process S345.
- the sensing data selection unit 34 selects the rainfall amount and the surrounding image data as the acquired data, and performs the process S346. move on.
- the sensing data selection unit 34 determines whether or not the importance level is "1", and when the importance level is "1" and the information that the building is destroyed is notified as the state information (process S346). , Yes), as the acquired data, the position coordinates / movement lines of the person, the position coordinates / movement lines of the machine, the surrounding image data, and the surrounding distance data are selected (process S348), and the process proceeds to process S34B. If the importance level is not "1" (process S346, No), the sensing data selection unit 34 proceeds to process S347.
- the sensing data selection unit 34 selects the sound of the machine and the temperature of the machine as the acquired data (process S347, Yes). Process S349) and process S34B. If the importance level is not "2" (process S347, No), the sensing data selection unit 34 proceeds to process S34A.
- the sensing data selection unit 34 acquires the sound of the machine, the temperature of the machine, the continuous operation time, and the surroundings as the acquired data.
- the image data of the above, the surrounding distance data, the position coordinates of the machine, and the movement line are selected, and the process proceeds to process S34B.
- the sensing data selection unit 34 determines whether or not the intervention level is "1" or "2", and when information such as expert judgment required or artificial intelligence instruction required is notified as state information. (Processing S34B, Yes), as acquired data, human position coordinates / movement lines, human image data, human distance data, temperature and humidity around people, machine position coordinates / movement lines, surrounding image data, surroundings The distance data, ambient temperature and humidity, rainfall, machine sound, and machine temperature are selected (process S34C), and the sensing data selection process (process S34) of process S1 is completed. When the intervention level is not “1" or "2" (process S34B, No), the sensing data selection process (process S34) of process S1 is terminated.
- FIG. 11 is a flowchart showing the sensing data analysis process (process S35) of the process S2 in the management device 30. Refer to FIGS. 2 and 3 as appropriate.
- the sensing data selection unit 34 selects a corresponding instruction to the moving body based on the flag data 21, the sensing data, and the instruction determination table 42.
- the sensing data analysis unit 35 determines whether or not the moving body is a human (process S351), and if it is a human, analyzes the human coordinates from the acquired sensing data (process S353) and analyzes the posture motion (process S354). ), Vital is analyzed (process S355), the surrounding environment of the person is analyzed (process S356), instruction information is generated (process S357), and the sensing data analysis process (process S35) of process S2 is completed. When the moving body is not a human being (processes S351 and No), the sensing data analysis unit 35 proceeds to process S352.
- Vital is an abbreviation for vital signs. It is the most basic information about a patient's life, also translated as a vital sign. Specifically, it often refers to the pulse or heart rate, respiration (number), blood pressure, and body temperature, and from these numerical information, the current situation of a person is grasped and expressed.
- the sensing data analysis unit 35 starts from the position coordinates and movement lines of the person. , Judgment of walking speed, judgment of vital state such as complexion, pulse and fatigue from person's image data, judgment of posture and fatigue from person's distance data, work from temperature and humidity around person Determine the comfort of the environment.
- the judgment criteria are that if the degree of fatigue is 80% or more, a break of 1 hour or more is required, and if the posture is crouched or collapsed, the rescue is required, the flow line and walking speed are staggering, or the legs. If there is entanglement, a break of 1 hour or more is required, and if the temperature / humidity is 39 degrees / 90% for 1 hour, a break of 0.5 hours is required.
- the sensing data analysis unit 35 uses the position coordinates / movement lines of the person and the machine. The closest predicted distance and the closest predicted time are determined from the position coordinates and movement line of.
- the determination criterion is to stop the machine if the closest approach distance is 3 m / predicted time of 15 s, otherwise to give an alarm to a person, reduce the moving speed of the machine, and change the route. Is.
- the sensing data analysis unit 35 determines whether or not the activity can be continued from the rainfall amount and the rainfall status of the surrounding image data. do.
- the criterion is that if 500 mm / h continues for 0.5 h, the machine is stopped, and if 500 mm / h continues for 1 hour, the machine is retracted, based on the results of the rainfall meter and image recognition.
- the sensing data analysis unit 35 determines whether or not the moving body is an unmanned construction machine (process S352), and if it is an unmanned construction machine (process S352, Yes), analyzes the machine coordinates from the acquired sensing data (process S360). ), The surrounding environment is analyzed (process S361), the machine state is analyzed (process S362), instruction information is generated (process S363), and the sensing data analysis process (process S35) of process S2 is completed. When the moving body is not an unmanned construction machine (process S352, No), the sensing data analysis unit 35 proceeds to process S365.
- the sensing data analysis unit 35 is in charge of the position coordinates of the person, the movement line, and the position coordinates of the machine.
- the closest approach distance is determined from the movement line, and the necessity of saving is determined from the surrounding image data and the surrounding distance data.
- the sensing data analysis unit 35 identifies that the failure or deterioration of the part can be predicted from the sound of the machine. The frequency of is detected, and the part where the temperature reaches a higher temperature than expected is detected from the temperature.
- the criterion is that a specific frequency is detected as a result of the sound analysis of the machine, and if it continues for 1 minute, the machine is stopped, and as a result of the temperature analysis, a part of 90 degrees or more is detected. If it continues for 1 minute, the machine will be stopped.
- the sensing data analysis unit 35 identifies that the failure or deterioration of the part can be predicted from the sound of the machine. Detects the frequency of the machine, detects the part that has reached a higher temperature than expected from the temperature, judges the necessity of maintenance work from the continuous operation time, the surrounding image data and the surrounding distance data, and the position of the machine. Estimate the travel time from the current location to the maintenance location from the coordinates and movement lines.
- process S363 as a judgment criterion, if a specific frequency is detected as a result of machine sound analysis, it is determined that maintenance is required, and if a part of 90 degrees or higher is detected as a result of temperature analysis, maintenance is required. If the continuous operation time is 50 hours or more, it is determined that maintenance is required, and the movement required time and the remaining operating time are calculated from the self-position, the surrounding image, and the distance data.
- the sensing data analysis unit 35 analyzes the surrounding environment, generates instruction information (process S366), and ends the sensing data analysis process (process S35) of process S2.
- the sensing data analysis unit 35 performs the position coordinates / movement lines of the person, the image data of the person, and the person.
- Experts based on distance data, temperature and humidity around people, position coordinates and movement lines of machines, image data around them, distance data around them, temperature and humidity around people, rainfall, machine noise, and machine temperature. Determine how to deal with multiple abnormalities. For example, it is a priority determination when a plurality of flags are generated at the same time, and an evacuation instruction when a person / machine evacuation destination / movement destination conflicts.
- the sensing data analysis unit 35 determines how to deal with a single abnormality in which artificial intelligence is not included in the emergency processing list. For example, as a result of image recognition, it is a countermeasure method when an unknown object not on the list is recognized or when an abnormal sound having a frequency not on the list is detected.
- the sensing data analysis unit 35 does not need the determination process.
- FIG. 12 is a diagram showing instruction contents based on the flag data and sensing data of the process S2.
- the responsiveness level is "1" and the information that the posture is walking slowly and the complexion is pale is notified as the state information
- the walking speed is 2 km / h from the movement line and the distance data, and the walking speed is staggered. It is judged that the person is walking while walking, the vital state that the degree of fatigue is 90% is judged from the complexion, and the temperature and humidity are 37 degrees and 90%, so that the comfort of the working environment is judged to be uncomfortable, so a break of 1 hour or more is required. It becomes an instruction.
- Line 435 detects a specific frequency of 90 Hz from the sound of the machine for 1 minute or more when the importance level is "2" and the information of self-destruction is notified as the state information, and 90 degrees or more from the temperature. It is an instruction to stop the machine because it detects a place where the temperature reaches and continues for 1 minute or more.
- Line 436 detects a specific frequency (90 Hz), detects a part having a temperature of 90 degrees or higher, and continuously operates when the importance level is "3" and the information that maintenance is required is notified as the state information. Is 50 hours or more, and it is determined from the self-position, surrounding images, and distance data that the movement time is 2 hours and the remaining operating time is 6 hours. It will be an instruction.
- a specific frequency 90 Hz
- the artificial intelligence is based on the same data group as when the intervention level is "1". From the analysis result from the database of image data, it is determined that the unknown object is an abnormally intruding vehicle, so that the instruction is to stop the machine and warn the people and the abnormally intruding vehicle in the vicinity.
- Line 439 is instructed when the intervention level is "3" and the information that only first aid is notified as the state information.
- the abnormal state monitoring system 100 of the moving body includes a management device 30 that transmits instruction information to the moving body based on non-stationary information of the abnormal state transmitted from the plurality of moving bodies, and a moving body side device 10 provided in the moving body.
- the mobile body side device 10 includes a communication means (for example, a communication unit 25) that communicates with the management device 30, a sensor information acquisition means (for example, a sensor information acquisition unit 12) that acquires sensor information of a plurality of sensors, and a sensor.
- Anomaly detection means for example, abnormality detection unit 13 that determines whether or not the information is abnormal, and a flag indicating an abnormality level and status information indicating an abnormality state when the abnormality detection means determines that the information is abnormal. It has a control means (for example, an abnormality processing unit 14 and a flag generation unit 15) that is created as flag data 21 including the above and transmits the flag data to the management device.
- a control means for example, an abnormality processing unit 14 and a flag generation unit 15
- flag data 21 including the above and transmits the flag data to the management device.
- the management device 30 has a storage unit 40 that stores an acquisition data determination table 41 that associates the abnormality level with the state information and the acquisition data, and when the flag data 21 is received from the moving body side device 10, the abnormality level of the flag data 21 In response to this, an instruction to acquire necessary sensing data can be transmitted to the moving body side device 10.
- the management device 30 stores a coping method determination table for determining a coping method based on the abnormality level, the state information, and the sensing data in the storage unit 40, and when the sensing data is received from the mobile body side device 10, the coping method is dealt with. Based on the method determination table (for example, the instruction determination table 42), instruction information which is a coping method for the moving body can be transmitted to the moving body side device 10.
- the method determination table for example, the instruction determination table 42
- the flag data 21 includes responsive information for determining whether or not a person is abnormal or affects a person, importance information for determining whether or not the surrounding environment is significantly affected, and remote instructions. However, it has intervening information to determine whether expert intervention is required. As a result, the urgency and importance are determined before the notification from the moving body side device 10 to the management device 30, so that the processing burden on the management device 30 side is small. Further, the management device 30 has an effect that it is easy to determine the priority and can deal with a large number of moving objects.
- the moving body is not limited to the unmanned construction machine and the site worker at the construction site.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Alarm Systems (AREA)
- Testing And Monitoring For Control Systems (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080094773.4A CN115023676A (zh) | 2020-02-18 | 2020-10-13 | 移动体的异常状态监视系统 |
| US17/798,674 US20230107387A1 (en) | 2020-02-18 | 2020-10-13 | Abnormal state monitoring system for mobile body |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-025142 | 2020-02-18 | ||
| JP2020025142A JP2021131599A (ja) | 2020-02-18 | 2020-02-18 | 移動体の異常状態監視システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021166320A1 true WO2021166320A1 (ja) | 2021-08-26 |
Family
ID=77390630
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/038633 Ceased WO2021166320A1 (ja) | 2020-02-18 | 2020-10-13 | 移動体の異常状態監視システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230107387A1 (enExample) |
| JP (1) | JP2021131599A (enExample) |
| CN (1) | CN115023676A (enExample) |
| WO (1) | WO2021166320A1 (enExample) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7364080B2 (ja) * | 2020-06-29 | 2023-10-18 | 日本電信電話株式会社 | 状態検知装置、方法およびプログラム |
| JP7567639B2 (ja) * | 2021-04-21 | 2024-10-16 | トヨタ自動車株式会社 | ロボット制御システム、ロボット制御方法、及び、制御プログラム |
| WO2025234368A1 (ja) * | 2024-05-07 | 2025-11-13 | マクセル株式会社 | 測定端末、および測定システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014203166A (ja) * | 2013-04-02 | 2014-10-27 | 株式会社日立製作所 | プラント設備管理システムおよびプラント設備管理システムの制御方法 |
| WO2017130549A1 (ja) * | 2016-01-29 | 2017-08-03 | 日立Geニュークリア・エナジー株式会社 | プラント監視装置およびプログラム |
| JP2019159903A (ja) * | 2018-03-14 | 2019-09-19 | オムロン株式会社 | 異常検知システム、サポート装置およびモデル生成方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3382305A (en) * | 1954-10-29 | 1968-05-07 | Du Pont | Process for preparing oriented microfibers |
| CA2381674A1 (en) * | 2002-04-12 | 2003-10-12 | Layne Daniel Tucker | Method and apparatus for determining positioning of mobile machines relative to utility lines |
| AU2012341569B2 (en) * | 2011-11-21 | 2016-02-04 | Hitachi Construction Machinery Co., Ltd. | Device for collecting construction machine operation data |
| US20160051153A1 (en) * | 2014-08-25 | 2016-02-25 | Rayan Nabil M. Mously | Radio frequency identification (rfid) enabled wireless heart rate monitoring system |
| JP6234359B2 (ja) * | 2014-12-15 | 2017-11-22 | 日立建機株式会社 | 作業機械のオイル性状の診断システム |
| US20190224841A1 (en) * | 2018-01-24 | 2019-07-25 | Seismic Holdings, Inc. | Exosuit systems and methods for monitoring working safety and performance |
| CN109445363A (zh) * | 2018-12-21 | 2019-03-08 | 杭州睿兴栋宇建筑科技有限公司 | 一种基于异常检测算法的施工现场动态安全监测系统 |
| CN109751086A (zh) * | 2019-03-08 | 2019-05-14 | 李静娴 | 一种矿区安全监控系统 |
| US11650595B2 (en) * | 2019-07-30 | 2023-05-16 | Caterpillar Inc. | Worksite plan execution |
-
2020
- 2020-02-18 JP JP2020025142A patent/JP2021131599A/ja not_active Ceased
- 2020-10-13 WO PCT/JP2020/038633 patent/WO2021166320A1/ja not_active Ceased
- 2020-10-13 CN CN202080094773.4A patent/CN115023676A/zh active Pending
- 2020-10-13 US US17/798,674 patent/US20230107387A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014203166A (ja) * | 2013-04-02 | 2014-10-27 | 株式会社日立製作所 | プラント設備管理システムおよびプラント設備管理システムの制御方法 |
| WO2017130549A1 (ja) * | 2016-01-29 | 2017-08-03 | 日立Geニュークリア・エナジー株式会社 | プラント監視装置およびプログラム |
| JP2019159903A (ja) * | 2018-03-14 | 2019-09-19 | オムロン株式会社 | 異常検知システム、サポート装置およびモデル生成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230107387A1 (en) | 2023-04-06 |
| CN115023676A (zh) | 2022-09-06 |
| JP2021131599A (ja) | 2021-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021166320A1 (ja) | 移動体の異常状態監視システム | |
| CN111650919B (zh) | 多维度监测的自动扶梯故障预测与健康管理方法及系统 | |
| GB2601937A (en) | Method and system for managing a crane and/or construction site | |
| KR20210062963A (ko) | 건설 작업자 안전 모니터링 시스템 및 이의 제어 방법 | |
| KR102441522B1 (ko) | 공장설비 자율제어 및 작업 공정 시뮬레이션을 이용한 공장 안전 제어 방법 및 시스템 | |
| JP6481635B2 (ja) | 接触判定装置、制御装置、接触判定システム、接触判定方法及び接触判定プログラム | |
| JP7157727B2 (ja) | エレベーター安全作業管理システムおよびエレベーター安全作業管理装置 | |
| CN115097790A (zh) | 一种基于数字孪生技术的车间人员模型重建及安全防护系统 | |
| CN111331596A (zh) | 一种机器人自动轨迹校正方法及系统 | |
| CN112800900A (zh) | 一种基于视觉感知的矿山人员倒地检测方法 | |
| CN112850387A (zh) | 一种电梯状态采集与诊断系统及方法 | |
| CN119693206B (zh) | 一种用于智能安全帽的施工人员安全管控方法及系统 | |
| CN116749183A (zh) | 一种用于矿用巡检机器人远程控制的驱动系统及方法 | |
| CN119109708B (zh) | 基于管理云平台的工业物联网安全管理方法、系统和介质 | |
| KR101670412B1 (ko) | 작업현장의 아차사고 모니터링 시스템 및 이를 이용한 모니터링 방법 | |
| CN120450679A (zh) | 基于巡检机器人的城市轨道交通变电所运维方法及系统 | |
| US20240078625A1 (en) | Ai server providing worker safety control solution and operation method of ai system including the same | |
| US20230195086A1 (en) | Abnormal state monitoring system and abnormal state monitoring method | |
| CN111985717A (zh) | 安全预警方法、装置、安全预警设备及存储介质 | |
| WO2014047944A1 (en) | system and method for improving manufacturing production | |
| CN115702780A (zh) | 一种野生动物异常状态分析方法、系统、终端及介质 | |
| CN114475623A (zh) | 车辆的控制方法、装置、电子设备及存储介质 | |
| Jesi et al. | Advancements in Sensor Technology and Computer Vision for Enhanced Road Safety and Anomaly Detection using Machine Learning Approach | |
| JP7789541B2 (ja) | 異常状態監視システム及び異常状態監視方法 | |
| CN118781583B (zh) | 基于MoE模型的司机风险行为预测系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20919752 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20919752 Country of ref document: EP Kind code of ref document: A1 |