WO2020250313A1 - 多角形検索方法 - Google Patents
多角形検索方法 Download PDFInfo
- Publication number
- WO2020250313A1 WO2020250313A1 PCT/JP2019/023152 JP2019023152W WO2020250313A1 WO 2020250313 A1 WO2020250313 A1 WO 2020250313A1 JP 2019023152 W JP2019023152 W JP 2019023152W WO 2020250313 A1 WO2020250313 A1 WO 2020250313A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- polygon
- area
- unit
- polygonal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/3867—Geometry of map features, e.g. shape points, polygons or for simplified maps
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
- G01C21/32—Structuring or formatting of map data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/587—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using geographical or spatial information, e.g. location
Definitions
- the present invention relates to a polygon search method.
- the map information is conventionally divided by a predefined rectangle (mesh) and specified by the rectangle.
- the spatiotemporal information of the automobiles existing in the area is acquired.
- a technique for searching spatiotemporal information as a one-dimensional bit string at high speed is disclosed (see Non-Patent Document 1).
- the present invention has been made in view of the above, and an object of the present invention is to search for spatiotemporal information with high accuracy.
- the polygon search method is a polygon search method executed by a polygon search device, and the polygon search device stores a storage unit.
- the storage unit is provided by converting a polygonal area in a predetermined unit area on a map into polygonal information represented by using the coordinates of the vertices of the polygonal area, and associating the polygonal information with the unit area.
- the conversion step to be stored in the polygon the specific step of specifying the spatiotemporal information including the position information corresponding to the coordinates in the predetermined unit area on the map, and the association with the unit area of the specified spatiotemporal information. It is characterized by including an extraction step of extracting spatiotemporal information including position information corresponding to the internal coordinates of the polygon area represented by the polygonal information.
- FIG. 1 is a schematic diagram illustrating a schematic configuration of the polygonal search device of the present embodiment.
- FIG. 2 is a diagram illustrating a data structure of map information.
- FIG. 3 is a diagram illustrating a data structure of polygon information.
- FIG. 4 is a diagram illustrating a data structure of spatiotemporal information.
- FIG. 5 is a diagram for explaining the processing of the conversion unit.
- FIG. 6 is a flowchart showing a polygon search processing procedure.
- FIG. 7 is a diagram showing an example of a computer that executes a polygon search program.
- FIG. 1 is a schematic diagram illustrating a schematic configuration of the polygonal search device of the present embodiment.
- the polygonal search device 10 of the present embodiment is realized by a general-purpose computer such as a personal computer, and includes an input unit 11, an output unit 12, a communication control unit 13, a storage unit 14, and a control unit 15. Be prepared.
- the input unit 11 is realized by using an input device such as a keyboard or a mouse, and inputs various instruction information such as processing start to the control unit 15 in response to an input operation by the operator.
- the output unit 12 is realized by a display device such as a liquid crystal display, a printing device such as a printer, or the like. For example, the output unit 12 displays the result of the polygon search process described later.
- the communication control unit 13 is realized by a NIC (Network Interface Card) or the like, and controls communication between an external device and the control unit 15 via a telecommunication line such as a LAN (Local Area Network) or the Internet.
- a NIC Network Interface Card
- the communication control unit 13 controls communication between the control unit 15 and a management device or the like that manages map information, spatiotemporal information, etc., which will be described later.
- the storage unit 14 is realized by a semiconductor memory element such as a RAM (Random Access Memory) or a flash memory (Flash Memory), or a storage device such as a hard disk or an optical disk.
- the storage unit 14 stores in advance a processing program for operating the polygon search device 10, data used during execution of the processing program, and the like, or temporarily stores each time the processing is performed.
- the storage unit 14 may be configured to communicate with the control unit 15 via the communication control unit 13.
- the storage unit 14 stores map information 14a, polygon information 14b, spatiotemporal information 14c, and the like. These pieces of information are collected or generated and stored in the storage unit 14 prior to the polygonal search process described later.
- the acquisition unit 15a collects the map information 14a from a management device or the like that manages the map information, and stores the map information 14a in the storage unit 14. Further, the acquisition unit 15a collects the spatiotemporal information 14c from the management device or the like that manages the spatiotemporal information output from the sensor or the like, and stores the spatiotemporal information 14c in the storage unit 14. Further, the conversion unit 15b, which will be described later, generates the polygon information 14b and stores it in the storage unit 14.
- the map information 14a includes the coordinates of the representative points of the polygonal area on the map.
- the map information 14a includes the coordinates of the center point of the polygonal area on the road, and is information expressing the shape of the road on the map by a list of coordinates of the center of the road, the road width, and the like.
- FIG. 2 is a diagram illustrating the data structure of the map information 14a.
- FIG. 2 illustrates map information 14a showing the shape of the road.
- the map information 14a representing the shape of the road includes a road center coordinate list, a road width, and the number of lanes.
- the road center coordinate list is a list of coordinates of the road center.
- the coordinates of the road center point are (0.5, 1.7), (1.2, 1.4), etc.
- the road shape is 5 m in width and the number of lanes is 3. Is expressed.
- the polygon information 14b is information representing a polygon area in a predetermined unit area on a map using the coordinates of the vertices of the polygon area, and is generated by a conversion unit 15b described later and corresponds to the unit area. It is the attached information.
- FIG. 3 is a diagram illustrating the data structure of the polygon information 14b.
- the polygon vertex list and the spatial mesh are associated with each other.
- the polygonal vertex list is a set of coordinates of the vertices of the polygonal area on the map.
- the coordinates of the vertices of the polygonal area such as (0.2, 1.3) and (1.2, 1.4) are listed.
- the spatial mesh is information for identifying a rectangular unit area defined on a map (hereinafter, referred to as a mesh ID), and mesh number 10 is exemplified in FIG.
- the spatiotemporal information 14c is information such as a sensor value including position information and time information, and is, for example, information indicating a traveling position of an automobile.
- the spatiotemporal information is a one-dimensional bit string including position information and time information.
- FIG. 4 is a diagram illustrating the data structure of the spatiotemporal information 14c.
- the spatiotemporal information 14c illustrated in FIG. 4 includes a data unit such as a time as time information, a longitude and latitude as position information, and a sensor value.
- Figure 4 shows the spatiotemporal information 14c represented by a one-dimensional bit string of the time "2019/1/1 10:15:30", the longitude "27.1984 °", the latitude "-15.2958 °", and the data part "data1". Is illustrated.
- the control unit 15 is realized by using a CPU (Central Processing Unit) or the like, and executes a processing program stored in a memory. As a result, the control unit 15 functions as an acquisition unit 15a, a conversion unit 15b, a specific unit 15c, and an extraction unit 15d, as illustrated in FIG. It should be noted that these functional parts may be implemented in different hardware, respectively or in part. Further, the control unit 15 may include other functional units.
- CPU Central Processing Unit
- the acquisition unit 15a collects the map information 14a from the management device or the like that manages the map information via the input unit 11 or the communication control unit 13, and stores the map information 14a in the storage unit 14. Further, the acquisition unit 15a collects the spatiotemporal information 14c from the management device or the like that manages the spatiotemporal information output from the sensor or the like via the input unit 11 or the communication control unit 13, and stores the spatiotemporal information 14c in the storage unit 14.
- the acquisition unit 15a may transfer such information to the conversion unit 15b or the specific unit 15c, which will be described later, without storing the information in the storage unit 14.
- the conversion unit 15b converts the polygonal area in the predetermined unit area on the map into the polygonal information 14b represented by using the coordinates of the vertices of the polygonal area, and associates the polygonal information with the unit area. Is stored in the storage unit 14.
- the conversion unit 15b converts the map information 14a including the coordinates of the representative points of the polygon area into the polygon information 14b representing the polygon area.
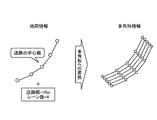
- FIG. 5 is a diagram for explaining the processing of the conversion unit 15b.
- the conversion unit 15b refers to the map information 14a, connects the coordinates of the center of the road to specify the center line of the road, and uses the road width and the number of lanes to represent the road. Identify the coordinates of the vertices in the polygonal area.
- FIG. 5 exemplifies polygon information in which four polygonal areas representing each of the four lanes on the road are represented by coordinates of vertices.
- the conversion unit 15b represents the polygonal area in the unit area for each rectangular unit area identified by the mesh ID defined on the map as a set of coordinates of the vertices of the polygonal area, and the polygonal information 14b. Is converted to, and is stored in the storage unit 14 in association with the mesh ID.
- the conversion unit 15b may transfer the polygon information 14b to the extraction unit 15d, which will be described later, without storing the polygon information 14b in the storage unit 14.
- the identification unit 15c specifies the spatiotemporal information 14c including the position information corresponding to the coordinates in the predetermined unit area on the map. Specifically, the specific unit 15c searches and specifies the spatiotemporal information 14c including the position information corresponding to the coordinates in the unit area for each mesh ID.
- the extraction unit 15d includes the position information corresponding to the coordinates inside the polygonal area represented by the polygonal information 14b associated with the unit area among the spatiotemporal information 14c specified by the specific unit 15c.
- the spatial information 14c is extracted.
- the extraction unit 15d refers to the polygon information 14b for each mesh ID, and among the spatiotemporal information 14c specified by the specific unit 15c, the one corresponding to the inside of the polygon area in the unit area. Is extracted.
- the extraction unit 15d extracts the spatiotemporal information 14c including the position information corresponding to the coordinates inside the polygon area represented by the polygon information by using the graphic calculation information.
- the extraction unit 15d applies, for example, PIP (Points In Polygon) processing using a graphic calculation library, and the coordinates on the map of the spatiotemporal information 14c are polygons represented by polygon information. Determine if it is inside the area.
- the extraction unit 15d outputs the extracted spatiotemporal information 14c to, for example, the output unit 12 or an application such as automatic driving or route guidance.
- the user can detect the spatiotemporal information in the polygonal area with high accuracy among the spatiotemporal information in the rectangular unit area defined on the map.
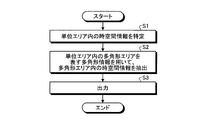
- FIG. 6 is a flowchart showing a polygon search processing procedure.
- the flowchart of FIG. 6 is started, for example, at the timing when the user inputs an operation instructing the start.
- the conversion unit 15b uses the coordinates of the vertices of the polygonal area for the polygonal area in the rectangular unit area identified by the mesh ID defined on the map. It is converted into the polygon information 14b represented by. For example, the conversion unit 15b uses the map information 14a including the coordinates of the representative points of the polygon area to convert it into the polygon information 14b representing the polygon area. Further, the conversion unit 15b stores the converted polygonal information 14b in the storage unit 14 in association with the mesh ID of the unit area.
- the specific unit 15c specifies the spatiotemporal information 14c including the position information corresponding to the coordinates in the predetermined unit area on the map (step S1). Specifically, regarding the spatiotemporal information 14c collected by the acquisition unit 15a, the specific unit 15c searches and specifies the spatiotemporal information 14c including the position information corresponding to the coordinates in the unit area for each mesh ID.
- the extraction unit 15d has the position information corresponding to the coordinates inside the polygonal area represented by the polygonal information 14b associated with the unit area among the spatiotemporal information 14c specified by the specific unit 15c.
- the spatiotemporal information 14c including the above is extracted (step S2).
- the extraction unit 15d refers to the polygon information 14b for each mesh ID, and among the spatiotemporal information 14c specified by the specific unit 15c, the one corresponding to the inside of the polygon area in the unit area. Is extracted.
- the extraction unit 15e outputs the extracted spatio-temporal information 14c to the output unit 12 and applications such as automatic driving and route guidance (step S3). As a result, a series of polygon search processes is completed.
- the conversion unit 15b represents the polygon area in the predetermined unit area on the map by using the coordinates of the vertices of the polygon area. It is converted into polygonal information 14b, and the polygonal information 14b is associated with the unit area and stored in the storage unit 14. Specifically, the conversion unit 15b converts the map information 14a including the coordinates of the representative points of the polygon area into the polygon information 14b representing the polygon area.
- the specific unit 15c specifies the spatiotemporal information 14c including the position information corresponding to the coordinates in the predetermined unit area on the map.
- the extraction unit 15d includes the spatiotemporal information including the position information corresponding to the coordinates inside the polygonal area represented by the polygonal information 14b associated with the unit area among the specified spatiotemporal information 14c. Extract 14c. Specifically, the extraction unit 15d uses the graphic calculation information to extract the spatiotemporal information 14c including the position information corresponding to the coordinates inside the polygon area represented by the polygon information 14b.
- the polygon search device 10 can further detect the spatiotemporal information in the polygonal area among the spatiotemporal information in the rectangular unit area defined on the map. For example, it is possible to detect a car existing on a specific road. As described above, according to the polygon search process of the polygon search device 10, it is possible to search the spatiotemporal information with high accuracy.
- the spatiotemporal information 14c is a one-dimensional bit string including position information and time information. As a result, in the polygon search process, it is possible to search for spatiotemporal information at a higher speed.
- the polygon search device 10 can be implemented by installing a polygon search program that executes the above-mentioned polygon search process as package software or online software on a desired computer.
- the information processing device can function as the polygon search device 10.
- the information processing device referred to here includes a desktop type or notebook type personal computer.
- the information processing device includes a smartphone, a mobile communication terminal such as a mobile phone and a PHS (Personal Handyphone System), and a slate terminal such as a PDA (Personal Digital Assistant).
- a mobile communication terminal such as a mobile phone and a PHS (Personal Handyphone System)
- a slate terminal such as a PDA (Personal Digital Assistant).
- the function of the polygonal search device 10 may be implemented in the cloud server.
- FIG. 7 is a diagram showing an example of a computer that executes a polygon search program.
- the computer 1000 has, for example, a memory 1010, a CPU 1020, a hard disk drive interface 1030, a disk drive interface 1040, a serial port interface 1050, a video adapter 1060, and a network interface 1070. Each of these parts is connected by a bus 1080.
- the memory 1010 includes a ROM (Read Only Memory) 1011 and a RAM 1012.
- the ROM 1011 stores, for example, a boot program such as a BIOS (Basic Input Output System).
- BIOS Basic Input Output System
- the hard disk drive interface 1030 is connected to the hard disk drive 1031.
- the disk drive interface 1040 is connected to the disk drive 1041.
- a removable storage medium such as a magnetic disk or an optical disk is inserted into the disk drive 1041.
- a mouse 1051 and a keyboard 1052 are connected to the serial port interface 1050.
- a display 1061 is connected to the video adapter 1060.
- the hard disk drive 1031 stores, for example, the OS 1091, the application program 1092, the program module 1093, and the program data 1094. Each piece of information described in the above embodiment is stored in, for example, the hard disk drive 1031 or the memory 1010.
- the polygonal search program is stored in the hard disk drive 1031 as, for example, a program module 1093 in which a command executed by the computer 1000 is described.
- the program module 1093 in which each process executed by the polygonal search device 10 described in the above embodiment is described is stored in the hard disk drive 1031.
- the data used for information processing by the polygonal search program is stored as program data 1094 in, for example, the hard disk drive 1031.
- the CPU 1020 reads the program module 1093 and the program data 1094 stored in the hard disk drive 1031 into the RAM 1012 as needed, and executes each of the above-described procedures.
- the program module 1093 and program data 1094 related to the polygonal search program are not limited to the case where they are stored in the hard disk drive 1031. For example, they are stored in a removable storage medium and are stored by the CPU 1020 via the disk drive 1041 or the like. It may be read out. Alternatively, the program module 1093 and the program data 1094 related to the polygonal search program are stored in another computer connected via a network such as LAN or WAN (Wide Area Network), and read by the CPU 1020 via the network interface 1070. It may be issued.
- LAN Local Area Network
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Geometry (AREA)
- Theoretical Computer Science (AREA)
- Library & Information Science (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- General Engineering & Computer Science (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
- Navigation (AREA)
- Processing Or Creating Images (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/023152 WO2020250313A1 (ja) | 2019-06-11 | 2019-06-11 | 多角形検索方法 |
| US17/617,312 US12372375B2 (en) | 2019-06-11 | 2019-06-11 | Polygon search method |
| EP19932253.8A EP3971524B1 (en) | 2019-06-11 | 2019-06-11 | Polygon lookup method |
| JP2021525449A JP7359207B2 (ja) | 2019-06-11 | 2019-06-11 | 多角形検索方法 |
| CN201980097334.6A CN113939711B (zh) | 2019-06-11 | 2019-06-11 | 多边形检索方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/023152 WO2020250313A1 (ja) | 2019-06-11 | 2019-06-11 | 多角形検索方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020250313A1 true WO2020250313A1 (ja) | 2020-12-17 |
Family
ID=73781680
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/023152 Ceased WO2020250313A1 (ja) | 2019-06-11 | 2019-06-11 | 多角形検索方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12372375B2 (https=) |
| EP (1) | EP3971524B1 (https=) |
| JP (1) | JP7359207B2 (https=) |
| CN (1) | CN113939711B (https=) |
| WO (1) | WO2020250313A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115329319B (zh) * | 2022-08-31 | 2023-05-19 | 重庆市规划和自然资源信息中心 | 一种基于ElasticSearch技术的空间算子搜寻系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03148800A (ja) * | 1989-07-04 | 1991-06-25 | Philips Gloeilampenfab:Nv | 車両航法データの表示方法と航法システムおよび航法システムを具える車両 |
| JPH09292254A (ja) * | 1996-04-26 | 1997-11-11 | Matsushita Electric Ind Co Ltd | 走行位置表示装置 |
| JP2011169631A (ja) * | 2010-02-16 | 2011-09-01 | Nomura Research Institute Ltd | 情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1168046C (zh) * | 1999-01-25 | 2004-09-22 | 善邻股份有限公司 | 道路地图制作、显示装置和方法 |
| US6581005B2 (en) * | 2000-11-30 | 2003-06-17 | Nissan Motor Co., Ltd. | Vehicle position calculation apparatus and method |
| JP5000965B2 (ja) * | 2006-09-29 | 2012-08-15 | ヤフー株式会社 | エリア情報提供方法 |
| JP4502335B2 (ja) * | 2007-03-30 | 2010-07-14 | 株式会社ナビタイムジャパン | 地図表示システム、端末装置、地図表示サーバ及び地図表示方法 |
| US9406229B2 (en) | 2009-11-12 | 2016-08-02 | Gm Global Technology Operations, Llc | Travel lane advisor |
| US20170089717A1 (en) * | 2015-09-29 | 2017-03-30 | Garmin Switzerland Gmbh | Use of road lane data to improve traffic probe accuracy |
| US10762776B2 (en) * | 2016-12-21 | 2020-09-01 | Here Global B.V. | Method, apparatus, and computer program product for determining vehicle lane speed patterns based on received probe data |
| JP6742931B2 (ja) * | 2017-02-16 | 2020-08-19 | 株式会社日立製作所 | 地図データ、地図データ作成装置、地図データ作成プログラム、地図データ使用装置、地図データ使用プログラム |
| US11362833B2 (en) * | 2019-09-30 | 2022-06-14 | Here Global B.V. | Method, apparatus, and system for embedding information into probe data |
-
2019
- 2019-06-11 JP JP2021525449A patent/JP7359207B2/ja active Active
- 2019-06-11 WO PCT/JP2019/023152 patent/WO2020250313A1/ja not_active Ceased
- 2019-06-11 EP EP19932253.8A patent/EP3971524B1/en active Active
- 2019-06-11 CN CN201980097334.6A patent/CN113939711B/zh active Active
- 2019-06-11 US US17/617,312 patent/US12372375B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03148800A (ja) * | 1989-07-04 | 1991-06-25 | Philips Gloeilampenfab:Nv | 車両航法データの表示方法と航法システムおよび航法システムを具える車両 |
| JPH09292254A (ja) * | 1996-04-26 | 1997-11-11 | Matsushita Electric Ind Co Ltd | 走行位置表示装置 |
| JP2011169631A (ja) * | 2010-02-16 | 2011-09-01 | Nomura Research Institute Ltd | 情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置 |
Non-Patent Citations (1)
| Title |
|---|
| "STCode: The Text Encoding Algorithm for Latitude/Longitude/Time", May 2014, SPRINGER |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020250313A1 (https=) | 2020-12-17 |
| EP3971524A4 (en) | 2023-01-04 |
| CN113939711B (zh) | 2024-12-20 |
| EP3971524B1 (en) | 2025-05-14 |
| JP7359207B2 (ja) | 2023-10-11 |
| US20220252423A1 (en) | 2022-08-11 |
| EP3971524A1 (en) | 2022-03-23 |
| US12372375B2 (en) | 2025-07-29 |
| CN113939711A (zh) | 2022-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10628136B2 (en) | Internet of things (IoT) application development | |
| CN113112509B (zh) | 图像分割模型训练方法、装置、计算机设备和存储介质 | |
| CN111125283B (zh) | 电子地图构建方法、装置、计算机设备和存储介质 | |
| US11734799B2 (en) | Point cloud feature enhancement and apparatus, computer device and storage medium | |
| CN115496698A (zh) | 动态渲染方法、装置、设备及存储介质 | |
| CN114972910A (zh) | 图文识别模型的训练方法、装置、电子设备及存储介质 | |
| US20230040195A1 (en) | Three-dimensional point cloud identification device, learning device, three-dimensional point cloud identification method, learning method and program | |
| CN118882625A (zh) | 基于大模型的地图构建方法、车辆控制方法、装置、电子设备、存储介质及程序产品 | |
| CN114625746A (zh) | 地图关联方法、装置、电子设备、计算机程序产品 | |
| JP7359207B2 (ja) | 多角形検索方法 | |
| US20230160719A1 (en) | Management device, management method, and management program | |
| US11347820B2 (en) | Facilitating identification of an intended country associated with a query | |
| CN112988932B (zh) | 高精地图标注方法、装置、设备、可读存储介质及产品 | |
| US12140448B2 (en) | Generation device, generation method, and generation program | |
| CN105677843A (zh) | 一种自动获取宗地四至属性的方法 | |
| CN114111813A (zh) | 高精地图元素更新方法、装置、电子设备及存储介质 | |
| CN120677510A (zh) | 图像内文本检测方法及装置 | |
| CN114170282B (zh) | 点云融合方法、装置、电子设备和介质 | |
| CN114136305B (zh) | 多图层地图的创建方法、系统、设备及计算机可读存储介质 | |
| CN114166231A (zh) | 众包数据采集方法、装置、设备、存储介质以及程序产品 | |
| CN114863300A (zh) | 一种最短路径生成方法及装置 | |
| CN114201568A (zh) | 信息处理方法、生成方法、装置、电子设备以及存储介质 | |
| CN115638799A (zh) | 高精地图更新方法、装置、电子设备及介质 | |
| JPWO2020250313A5 (https=) | ||
| CN115615443B (zh) | 高精地图数据处理方法、装置、电子设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19932253 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021525449 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019932253 Country of ref document: EP Effective date: 20211213 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 2019932253 Country of ref document: EP |
|
| WWG | Wipo information: grant in national office |
Ref document number: 17617312 Country of ref document: US |