WO2020196744A1 - Motor control device, motor control method, and motor unit - Google Patents
Motor control device, motor control method, and motor unit Download PDFInfo
- Publication number
- WO2020196744A1 WO2020196744A1 PCT/JP2020/013643 JP2020013643W WO2020196744A1 WO 2020196744 A1 WO2020196744 A1 WO 2020196744A1 JP 2020013643 W JP2020013643 W JP 2020013643W WO 2020196744 A1 WO2020196744 A1 WO 2020196744A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- energization
- phase
- motor
- duty
- signal
- Prior art date
Links
Images

















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60J—WINDOWS, WINDSCREENS, NON-FIXED ROOFS, DOORS, OR SIMILAR DEVICES FOR VEHICLES; REMOVABLE EXTERNAL PROTECTIVE COVERINGS SPECIALLY ADAPTED FOR VEHICLES
- B60J7/00—Non-fixed roofs; Roofs with movable panels, e.g. rotary sunroofs
- B60J7/02—Non-fixed roofs; Roofs with movable panels, e.g. rotary sunroofs of sliding type, e.g. comprising guide shoes
- B60J7/04—Non-fixed roofs; Roofs with movable panels, e.g. rotary sunroofs of sliding type, e.g. comprising guide shoes with rigid plate-like element or elements, e.g. open roofs with harmonica-type folding rigid panels
- B60J7/057—Driving or actuating arrangements e.g. manually operated levers or knobs
- B60J7/0573—Driving or actuating arrangements e.g. manually operated levers or knobs power driven arrangements, e.g. electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/04—Wipers or the like, e.g. scrapers
- B60S1/06—Wipers or the like, e.g. scrapers characterised by the drive
- B60S1/08—Wipers or the like, e.g. scrapers characterised by the drive electrically driven
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/15—Controlling commutation time
- H02P6/153—Controlling commutation time wherein the commutation is advanced from position signals phase in function of the speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/04—Wipers or the like, e.g. scrapers
- B60S1/06—Wipers or the like, e.g. scrapers characterised by the drive
- B60S1/16—Means for transmitting drive
- B60S1/166—Means for transmitting drive characterised by the combination of a motor-reduction unit and a mechanism for converting rotary into oscillatory movement
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2209/00—Indexing scheme relating to controlling arrangements characterised by the waveform of the supplied voltage or current
- H02P2209/07—Trapezoidal waveform
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2209/00—Indexing scheme relating to controlling arrangements characterised by the waveform of the supplied voltage or current
- H02P2209/11—Sinusoidal waveform
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2209/00—Indexing scheme relating to controlling arrangements characterised by the waveform of the supplied voltage or current
- H02P2209/13—Different type of waveforms depending on the mode of operation
Definitions
- the present invention relates to a motor control device, a motor control method, and a motor unit.
- a wiper motor (brushless motor) has been used as a drive source for swinging the wiper arm in a wiper device mounted on a vehicle.
- the wiper device swings the wiper arm within a predetermined range on the windshield to wipe off dust and raindrops adhering to the windshield.
- the wiper device has a low speed (Lo) operation mode in which the wiper blade is operated at a low speed by driving the wiper motor at a low speed and a high speed (Hi) operation mode in which the wiper blade is operated at a high speed by driving the wiper motor at a high speed.
- Lo low speed
- Hi high speed
- the drive control for energizing the brushless motor is a rectangular wave drive in the low-speed operation mode and an advance / wide-angle energization drive in the high-speed operation mode.
- the advance angle / wide-angle energization drive refers to a drive in which the energization angle is made larger than that of the rectangular wave drive in the low-speed operation mode and the brushless motor is energized at the timing of the advance angle.
- the drive control for energizing the brushless motor is a sine wave drive control in the low-speed operation mode and an advance / wide-angle energization drive in the high-speed operation mode.
- the operating noise of the brushless motor in the low speed operation mode can be reduced (silenced) as compared with the control of the wiper device described in Patent Document 1. (See paragraphs [0037], [0048] and [0056] of Patent Document 2).
- the present invention has been made in consideration of the above circumstances, and flexible motor control can be performed while considering at least one of reduction of current consumption and improvement of motor output.
- the main purpose is to provide a motor control device, a motor control method and a motor unit.
- one aspect of the present invention is a motor control device for controlling a brushless motor including a rotor and three-phase armature coils of U-phase, V-phase, and W-phase, and the rotor.
- the position detection unit that detects the rotation position, the first control mode, and the second control mode can be selected.
- the first control mode the first is performed at the energization timing according to the rotation position of the rotor.
- the second control mode a control unit that outputs a drive signal to the inverter and outputs a second drive signal to the inverter at an energization timing corresponding to the rotation position of the rotor, and in the first control mode.
- the inverter that outputs the first energization signal as the applied voltage to the three-phase armature coil and outputs the second energization signal as the applied voltage to the three-phase armature coil in the second control mode.
- the duty value when the duty of the applied voltage is the same for any two of the three phases is larger in the second control mode than in the first control mode. It is a control device.
- flexible motor control can be performed while considering at least one of reduction of current consumption and improvement of motor output.
- the brushless motor in the high-speed operation mode (second control mode), the brushless motor is driven in a sine wave by inputting the second energization signal. It is possible to suppress the operating noise of the brushless motor.
- the motor control device of this embodiment controls a brushless motor that swings the wiper arm. Then, in the low output mode (first control mode) in which the output of the brushless motor is low, the motor control device energizes the brushless motor by a sine wave (first energization signal) in which harmonics are superimposed on the sine wave. In the high output mode (second control mode), which has a higher output than the low output mode, the brushless motor is energized by a sine wave (second energization signal) in which the first energization signal is a wide-angle trapezoidal wave.
- first control mode in which the output of the brushless motor is low
- the motor control device energizes the brushless motor by a sine wave (first energization signal) in which harmonics are superimposed on the sine wave.
- second control mode which has a higher output than the low output mode
- the brushless motor is energized by a sine wave (second energization signal) in which the first energization signal is
- FIG. 1 is a diagram showing an example of a schematic configuration showing a windshield 11 of a vehicle 10 equipped with a wiper device 12 provided with a motor control device according to the present embodiment.
- the vehicle 10 includes a windshield 11 and a wiper device 12.
- the wiper device 12 wipes the windshield 11.
- the wiper device 12 includes wiper arms 14, 16, wiper blades 17, 18, a motor unit 19, and a power transmission mechanism 20.
- the wiper arm 14 swings around the pivot shaft 13.
- the wiper arm 16 swings around the pivot shaft 15.
- the wiper blade 17 is attached to the free end of the wiper arm 14.
- the wiper blade 18 is attached to the free end of the wiper arm 16.
- the motor unit 19 drives the wiper arms 14 and 16.
- the power of the motor unit 19 is individually transmitted to the wiper arms 14 and 16 via the power transmission mechanism 20 composed of levers, links and the like.
- FIG. 2 is a diagram showing an example of the appearance of the motor unit 19 in the present embodiment.
- FIG. 3 is a bottom view of the motor unit 19 shown in FIG. 2 with the undercover 28 removed.
- the appearance of the motor unit 19 is mainly composed of the case 23 and the frame 24.
- the case 23 has a bottomed cylindrical shape.
- the frame 24 has a hollow shape.
- the frame 24 and the case 23 are fixed by a fastening member (not shown).
- the motor unit 19 includes a brushless motor 30, a rotor shaft 22a, an opening 24a, a worm wheel 25, an output shaft 26, a reduction mechanism 27, an undercover 28, a control board 29, a sensor magnet 38, and a motor control.
- the device 33 is provided.
- the brushless motor 30 swings the wiper arms 14 and 16 based on the control instruction of the motor control device 33.
- the brushless motor 30 is a three-phase four-pole brushless motor.
- the brushless motor 30 includes a stator 21 and a rotor (rotor) 22.
- the stator 21 is fixed to the inner circumference of the case 23.
- the stator 21 includes three-phase armature coils 21u, 21v, 21w.
- the stator 21 is wound with armature coils 21u, 21v, 21w.
- the three-phase armature coils 21u, 21v, 21w are connected by a delta connection connected at the neutral point at one end.
- the connection is not limited to the delta connection and may be a Y connection.
- the brushless motor 30 is a motor in which each armature coil 21u, 21v, 21w functions as both a positive electrode and a negative electrode.
- the rotor 22 is provided inside the stator 21.
- the rotor 22 includes a rotor shaft 22a and a four-pole permanent magnet 22b attached to the rotor shaft 22a.
- a plurality of bearings (not shown) are provided in the case 23, and the rotor shaft 22a is rotatably supported by the plurality of bearings.
- the rotor 22 has an inner rotor type structure arranged inside the stator 21, but may have an outer rotor type structure in which the rotor 22 is arranged outside the stator 21.
- a reduction mechanism 27 is formed on the outer periphery of a portion of the rotor shaft 22a arranged in the frame 24.
- the speed reduction mechanism 27 includes a worm 22c and a gear 25a.
- the worm 22c is provided on the outer circumference of the rotor shaft 22a arranged in the frame 24.
- the gear 25a is formed on the outer periphery of the worm wheel 25 provided in the frame 24.
- the gear 25a is meshed with the worm 22c.
- the worm wheel 25 is configured to rotate integrally with the output shaft 26.
- the speed reduction mechanism 27 lowers the rotation speed (output rotation speed) of the output shaft 26 to the rotation speed (input rotation speed) of the rotor 22.
- a shaft hole (not shown) is provided in the upper portion of the frame 24. The end of the output shaft 26 opposite to the fixed end of the worm wheel 25 is exposed to the outside through the shaft hole of the frame 24.
- a power transmission mechanism 20 is connected to a portion of the output shaft 26 exposed to the outside of the frame 24.
- the opening 24a is provided in a portion of the frame 24 opposite to the shaft hole.
- the opening 24a is formed to attach the worm wheel 25 or the like inside the frame 24.
- the undercover 28 is provided so as to close the opening 24a.
- the undercover 28 has a tray shape.
- the control board 29 is provided in a space surrounded by the undercover 28 and the frame 24. As shown in FIG. 2, for example, the control board 29 is attached to the undercover 28.
- the control board 29 is provided with a motor control device 33 that controls the brushless motor 30.
- the sensor magnet 38 is provided at a position of the rotor shaft 22a arranged in the frame 24.
- the sensor magnet 38 rotates integrally with the rotor shaft 22a.
- the sensor magnet 38 is magnetized so that the north and south poles are alternately arranged along the circumferential direction of the rotor shaft 22a.
- FIG. 4 is a diagram showing an example of a schematic configuration of the control system of the wiper device 12 in the present embodiment.
- the wiper device 12 includes a wiper switch 37, a rotation angle detection unit 39, a vehicle speed sensor 40, and a motor control device 33.
- the wiper switch 37 is provided in the vehicle interior of the vehicle 10.
- the wiper switch 37 is a switch that swings the wiper arms 14 and 16.
- the wiper switch 37 has a low-speed operation mode in which the wiper arms 14 and 16 are operated at a low speed (for example, a preset speed), a high-speed operation mode in which the wiper arms 14 and 16 are operated at a higher speed than the low-speed operation mode, and the wiper arms 14 and 16. It is possible to switch to each mode of the stop mode for stopping the swing operation.
- the wiper switch 37 is operated by the driver to output an operation signal indicating the operation to the motor control device 33.
- the driver can switch the wiping speed of the wiper arms 14 and 16 by operating the wiper switch 37 based on conditions such as the amount of rainfall and the amount of snowfall.
- the driver can select a low-speed operation mode in which the wiper arms 14 and 16 are operated at a predetermined low speed by operating the wiper switch 37.
- the wiper switch 37 outputs a low-speed operation mode signal indicating the low-speed operation mode to the motor control device 33 as an operation signal based on the operation of selecting the low-speed operation mode by the driver.
- the driver can select a high-speed operation mode in which the wiper switches 37 are operated to operate the wiper arms 14 and 16 at a speed higher than the above-mentioned low speed when the amount of rainfall or snowfall is large.
- the wiper switch 37 outputs the high-speed operation mode signal indicating the high-speed operation mode to the motor control device 33 as an operation signal based on the operation of selecting the high-speed operation mode by the driver.
- the wiper switch 37 uses the stop mode signal indicating the stop mode as an operation signal to the motor control device 33. Output to.
- the vehicle speed sensor 40 is provided in the vehicle 10.
- the vehicle speed sensor 40 measures the traveling speed (hereinafter, referred to as “vehicle speed”) V of the vehicle 10.
- vehicle speed the traveling speed of the vehicle 10.
- the vehicle speed sensor 40 outputs the measured vehicle speed V of the vehicle 10 to the motor control device 33.
- the rotation angle detection unit 39 detects a signal corresponding to the rotation of the rotor 22.
- the rotation angle detection unit 39 is provided with three Hall ICs and is provided at positions magnetically 120 degrees from each other with respect to the rotor shaft 22a. When the rotor 22 rotates, these three Hall ICs output pulse signals that are 120 degrees out of phase with each other to the motor control device 33. That is, the rotation angle detection unit 39 generates a pulse signal based on the change in the magnetic poles of the sensor magnet 38 as the rotor 22 rotates, and outputs the pulse signal to the motor control device 33.
- the motor control device 33 includes an inverter 52 and a control unit 54.
- the inverter 52 includes six switching elements 52a to 52f connected by a three-phase bridge, and diodes 53a to 53f connected in antiparallel between the collectors and emitters of the switching elements 52a to 52f.
- Each of the switching elements 52a to 52f is, for example, a FET (Field Effect Transistor) or an IGBT (Insulated Gate Bipolar Transistor).
- Each gate of the six bridge-connected switching elements 52a to 52f is connected to the control unit 54.
- the drain or source (collector or emitter) of the switching elements 52a to 52f is connected to the delta-connected armature coils 21u, 21v, 21w. More specifically, the neutral point 55a, which is the connection point between the source of the switching element 52a and the drain of the switching element 52d, is connected to the connection point 21a of the armature coil 21w and the armature coil 21u. The neutral point 55b, which is the connection point between the source of the switching element 52b and the drain of the switching element 52e, is connected to the connection point 21b of the armature coil 21w and the armature coil 21v.
- the neutral point 55c which is the connection point between the source of the switching element 52c and the drain of the switching element 52f, is connected to the connection point 21c of the armature coil 21v and the armature coil 21u.
- the six switching elements 52a to 52f perform a switching operation based on the drive signal (gate signal) output from the control unit 54, and the power supply voltage of the DC power supply 51 applied to the inverter 52 is set to three phases.
- an AC voltage of (U phase, V phase, W phase) it is supplied as an energization signal to the armature coils 21u, 21v, 21w.
- the control unit 54 determines the rotation position of the rotor 22 based on the pulse signal supplied from the rotation angle detection unit 39. Further, the control unit 54 detects the rotation speed of the rotor 22 based on the pulse signal. Then, the control unit 54 drives the brushless motor 30 in a sine wave in a low output mode in which the output of the brushless motor 30 is low. That is, by outputting the first drive signal to the inverter 52, the control unit 54 energizes the armature coils 21u, 21v, 21w by the sine wave (first energization signal) in which harmonics are superimposed on the sine wave. , The rotor 22 is rotationally driven.
- the first drive signal corresponds to the first energization signal.
- control unit 54 outputs the first drive signal as an instruction signal for controlling the inverter 52. Then, the inverter 52 drives each of the three phases in a sine wave by the first energization signal based on the instruction signal (details will be described later with reference to FIG. 6).
- the control unit 54 outputs the second drive signal to the inverter 52 in the high output mode in which the output is higher than the low output mode, so that the armature coils 21u, 21v, 21w and the first energization signal are wide-angle trapezoidal.
- the rotor 22 is rotationally driven by energizing with a waved sine wave (second energization signal).
- the second drive signal corresponds to the second energization signal. That is, the control unit 54 outputs the second drive signal as an instruction signal for controlling the inverter 52. Then, the inverter 52 drives each of the three phases in a sine wave by the second energization signal based on the instruction signal (details will be described later with reference to FIG. 7).
- FIG. 5 is a diagram showing an example of a schematic configuration of the control unit 54 in the present embodiment.
- the control unit 54 includes a position detection unit 61, a load determination unit 62, a mode determination unit 63, and a drive control unit 64.
- the position detection unit 61 detects the rotation position of the rotor 22 based on the pulse signal supplied from the rotation angle detection unit 39.
- the position detection unit 61 outputs the detected rotation position of the rotor 22 to the drive control unit 64.
- the load determination unit 62 determines whether or not the vehicle speed V measured by the vehicle speed sensor 40 exceeds a preset predetermined value Vth.
- the load determination unit 62 determines that the load of the brushless motor 30 is a high load when the vehicle speed V measured by the vehicle speed sensor 40 exceeds a predetermined value Vth.
- the load determination unit 62 outputs a high load signal indicating the determination result to the mode determination unit 63. This is because when the vehicle speed V of the vehicle 10 increases, the air volume of the vehicle 10 to the windshield 11 increases, and the movement of the wiper blades 17 and 18 that wipe the windshield 11 is hindered.
- the brushless motor 30 needs to swing the wiper arms 14 and 16 at high output. Therefore, when the vehicle speed V exceeds the predetermined value Vth, the control unit 54 shifts from the low output mode to the high output mode to generate a large torque for the brushless motor 30, and the position detection unit 61 detects it.
- the rotation speed of the brushless motor 30 is increased by controlling the advance angle at a predetermined electric angle with reference to the rotation position of the rotor 22.
- the load determination unit 62 is a predetermined value calculated from a predetermined value of the rotation speed of the rotor 22 and the current value of the brushless motor 30 detected based on the pulse signal supplied from the rotation angle detection unit 39, or both. Determines whether or not exceeds a preset predetermined value.
- the load determination unit 62 has a predetermined value calculated from the rotation speed of the rotor 22 and / or the current value of the brushless motor 30 detected based on the pulse signal supplied from the rotation angle detection unit 39. When the preset value exceeds a preset value, it is determined that the load of the brushless motor 30 is high.
- the load determination unit 62 determines that the load of the brushless motor 30 is a high load
- the load determination unit 62 outputs a high load signal indicating the determination result to the mode determination unit 63. This is because changes in conditions such as changes in rainfall occur, resistance to movement of the wiper blades 17 and 18 on the windshield 11 (wiping surface) of the vehicle 10 increases, and movement of the wiper blades 17 and 18 is hindered. Is. In this case, the brushless motor 30 needs to swing the wiper arms 14 and 16 at high output.
- the control unit 54 increases from the low output mode to the high value.
- the brushless motor is controlled at a predetermined electric angle based on the rotation position of the rotor 22 detected by the position detection unit 61. Increase the number of revolutions of 30.
- the mode determination unit 63 determines whether the brushless motor 30 is driven in the low output mode, the high output mode, or the brushless motor 30 is stopped. When the mode determination unit 63 acquires the low-speed operation mode signal from the wiper switch 37, it determines that the brushless motor 30 is driven in the low output mode, and outputs a low output mode signal indicating the low output mode to the drive control unit 64. .. When the high-speed operation mode signal is acquired from the wiper switch 37, the mode determination unit 63 determines that the brushless motor 30 is driven in the high output mode, and outputs a high output mode signal indicating the high output mode to the drive control unit 64. .. Further, the mode determination unit 63 determines that the brushless motor 30 is driven in the high output mode when the high load signal is acquired from the load determination unit 62, and transmits the high output mode signal indicating the high output mode to the drive control unit 64. Output.
- the mode determination unit 63 determines to stop the drive of the brushless motor 30, and outputs a stop signal indicating the stop of the drive of the brushless motor 30 to the drive control unit 64. ..
- the drive control unit 64 includes a first drive control unit 641 and a second drive control unit 642.
- the drive control unit 64 executes the third harmonic energization drive of the brushless motor 30 by the first drive control unit 641.
- FIG. 6 is a timing chart showing the energization timings of the U, V, and W phases by the first drive control unit 641 in the present embodiment.
- the angle from 0 ° to 360 ° shown on the horizontal axis of FIG. 6 is an electric angle representing an energization period within one cycle of the first energization signal.
- FET_DUTY [%] shown on the vertical axis represents the duty of the applied voltage applied to each phase.
- the first energization signal represents the applied voltage of each of the three phases in which the third harmonic is superimposed on the sine wave. That is, in the first control mode, the inverter 52 is the first energization timing indicating the energization timing of each of the three phases in which the third harmonic is superimposed on the sine wave at the energization timing according to the rotation position of the rotor. It outputs a signal and drives each of the three phases of the brushless motor in a sine wave.
- the drive control for energizing the brushless motor 30 by the first energization signal may be referred to as a third harmonic energization drive.
- the first drive control unit 641 outputs the first drive signal to the inverter 52 at the energization timing corresponding to the rotation position of the rotor 22 detected by the position detection unit 61, so that the first drive control unit 641 can contact the inverter 52.
- a first energization signal for driving the brushless motor 30 by energizing the third harmonic is generated.
- the first energization signal has a waveform in which a third harmonic is superimposed on a sine wave (hereinafter, referred to as a third harmonic superimposed wave).
- the duty (peak voltage) of the applied voltage at the peak of the waveform is about 100% (97 to 99%) in a certain section, and the duty of the applied voltage at the valley is about 0% (1 to 1 to). 3%).
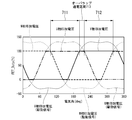
- 7A to 7D are timing charts showing the energization timings of the U, V, and W phases by the second drive control unit 642 in the present embodiment.
- the angles from 0 ° to 360 ° shown on the horizontal axis of FIGS. 7A to 7D are electric angles representing the energization period within one cycle of the second energization signal.
- FET_DUTY [%] shown on the vertical axis represents the duty of the applied voltage applied to each phase.
- the second energization signal is the energization timing according to the rotation position of the rotor 22 (rotor), and only the duty of the applied voltage of the first phase out of the three phases is the duty. Between the normal energization section where the duty is 100% and the normal energization section where only the duty of the applied voltage of the second phase is 100%, the duty of the applied voltage of the first phase and the second phase is 100%. It is a signal including an overlap energization section which becomes a duty (described later with reference to FIGS. 7A to 7D). For example, in the first energization signal shown in FIG.
- the section is set as an overlap energization section (voltage value overlapping section) in which the applied voltages of both the W phase and the U phase are also 100% duty.
- the overlap energization section is also set between the other phases (between the U phase and the V phase and between the V phase and the W phase).
- the second energization signal includes only the energization section (normal energization section 731) in which only the duty of the applied voltage of the V phase of the three phases is 100% and the duty of the applied voltage of the W phase.
- the second energization signal includes only the energization section (normal energization section 751) in which only the duty of the applied voltage of the W phase of the three phases is 100% and the duty of the applied voltage of the U phase.
- the second energization signal is 100% only in the normal energization section in which only the duty of the applied voltage of the first phase of the three phases is 100% and the duty of the applied voltage of the second phase. It has been described that the signal includes an overlapping energization section in which the duty of the applied voltage of the first phase and the second phase is 100% of the duty of the normal energization section.
- the second energization signal is the energization section (normal energization section 701) in which only the duty of the applied voltage of the U phase is 0% of the three phases and the applied voltage of the V phase.
- energization section 703 overlap energization section 703 in which the duty of the applied voltage of the U phase and the V phase is both 0% between the energization section (normal energization section 702) in which only the duty is 0%.
- the second energization signal only the energization section (normal energization section) in which only the duty of the applied voltage of the V phase is 0% and the duty of the applied voltage of the W phase are 0%.
- energized section overlap energized section between the energized section (normal energized section) and the duty of the applied voltage of the V phase and the W phase is 0%.
- the second energization signal includes an energization section in which only the duty of the applied voltage of the W phase is 0% (normal energization section) and an energization section in which only the duty of the applied voltage of the U phase is 0% (normally). There is an energized section (overlapping energized section) between the energized section) and the duty of the applied voltage of the W phase and the U phase is 0%.
- the drive control for energizing the brushless motor 30 by the second energization signal may be referred to as a wide-angle trapezoidal wave energization drive.
- the second drive control unit 642 outputs the second drive signal to the inverter 52 at the energization timing corresponding to the rotation position of the rotor 22 detected by the position detection unit 61, so that the second drive control unit 642 can transmit the second drive signal to the inverter 52.
- a second energization signal for driving the brushless motor 30 with a wide-angle trapezoidal wave energization is generated.
- driving the brushless motor 30 with a wide-angle trapezoidal wave energization significantly improves the output characteristics of the motor as compared with driving the brushless motor 30 with a third harmonic energization in the low output mode. This is because (hereinafter referred to as purpose 1). Further, in the high output mode, driving the brushless motor 30 with a wide-angle trapezoidal wave energization is different from driving the brushless motor 30 with a rectangular wave (wide-angle energization drive in Patent Documents 1 and 2) in the high output mode. This is because it is possible to suppress the operating noise (hereinafter referred to as the purpose 2).
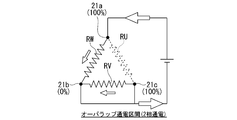
- FIG. 8 is a diagram for explaining the principle of improving the output characteristics of the motor by providing the overlap energization section in the second energization signal.
- the resistor RW, resistor RU, and resistor RV shown in FIG. 8 are circuits composed of switching elements 52a to 52f of the inverter 52 and three-phase armature coils 21u, 21v, and 21w, respectively (referred to as a resistor circuit). It shall indicate the reference resistance in. Further, the size of the arrow shown in FIG. 8 is proportional to the size of the value of the current applied to each phase.
- FIG. 8A is a circuit diagram in an energized state near an electric angle of 180 ° in FIG. 7D (reference numeral 800a in FIG. 7D).
- the duty of the W phase applied voltage is 100% at the connection point 21a
- the duty of the V phase applied voltage is 0% at the connection point 21b
- the duty of the U phase applied voltage is at the connection point 21c. It is energized at 50%.
- FIG. 8A when driving in the normal energization section (three-phase energization) in the high output mode, all three phases are energized, so that the resistance Ra between terminals in the resistance circuit is the resistance RW (resistance).
- Ra 2R / 3 according to the following equation.
- R The resistance Ra between terminals in the resistance circuit means a resistance value between the positive electrode terminal and the negative electrode terminal of the DC power supply 51 shown in FIG.
- the current flowing through the resistor RW is the series resistance of the resistor RU and the resistor RV. It is larger than the flowing current.
- FIG. 8B is a circuit diagram in an energized state in the vicinity of an electric angle of 210 ° in FIG. 7A (reference numeral 800b in FIG. 7A).
- the inter-terminal resistance Rb in the resistance circuit means a resistance value between the positive electrode terminal and the negative electrode terminal of the DC power supply 51 shown in FIG.
- a current flows through the resistor RW and the resistor RV, but almost no current flows through the resistor RU.
- an applied voltage of 100% duty is applied to the connection point 21a and the connection point 21c, and an applied voltage of 0% duty is applied to the connection point 21b. Therefore, the connection point 21a and the connection point 21c have the same potential, and no current flows between the connection point 21a and the connection point 21c.
- connection point 21a and the connection point 21b and the potential difference between the connection point 21c and the connection point 21b become equal, and the current flowing between the connection point 21a and the connection point 21b and the connection point The current flowing between the 21c and the connection point 21b becomes equal.
- the magnitude of the current flowing through the resistor RW and the magnitude of the current flowing through the resistor RV are almost the same, but the current hardly flows through the resistor RU, and the brushless motor 30 affects the resistance value of the resistor RU. I will not receive it.
- the circuit to be energized changes from 3 phase to 2 phase, and the resistance calculation result changes from 2R / 3 to R / 2, so that the motor internal resistance is changed to (2R / 3).
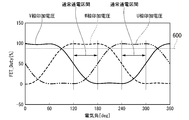
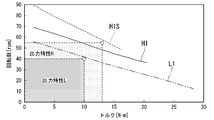
- FIG. 9 is a diagram showing the motor characteristics of the brushless motor 30 in the third harmonic energization drive and the wide-angle trapezoidal wave energization drive in the present embodiment.
- L1 shows the motor characteristics of the third harmonic energization drive.
- H1 shows the motor characteristics of the wide-angle trapezoidal wave energization drive.
- H1S shows the motor characteristics of a wide-angle trapezoidal wave + "advance angle> 0 °" energized drive.
- the wide-angle trapezoidal wave + "advance angle> 0 °" energization drive outputs a second energization signal at an energization timing in which a predetermined electric angle is advanced with reference to the rotation position of the rotor 22, and the brushless motor Wide-angle trapezoidal wave energization drive that drives each of the three phases with a sine wave.
- the region indicated by the output characteristic L indicates the motor characteristics in the one-wiping cycle required in the low-speed operation mode at a low vehicle speed.
- the region indicated by the output characteristic H indicates the motor characteristics in the one-wiping cycle required for the high-speed operation mode during high-speed running. As shown in FIG.
- the drive control unit 64 can satisfy the motor characteristics in the one-wiping cycle required in the low-speed operation mode by performing the third-order harmonic energization drive in the low output mode. Further, the drive control unit 64 executes wide-angle trapezoidal wave energization drive when the mode shifts from the low output mode to the high output mode. That is, the drive control unit 64 reduces the rotation speed of the brushless motor 30 by the wide-angle trapezoidal wave energization drive and the wide-angle trapezoidal wave + "advance angle> 0 °" energization drive as compared with the third harmonic energization drive in the low output mode.
- the drive control unit 64 satisfies the motor characteristics in the one-wiping cycle required in the high-speed operation mode by performing wide-angle trapezoidal wave energization drive or wide-angle trapezoidal wave + "advance angle> 0 °" energization drive. be able to.
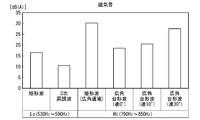
- FIG. 10 and 11 are diagrams showing the characteristics of the operating noise of the brushless motor 30 in the drive control used in the low output mode or the high output mode.
- FIG. 10 shows that the drive control of the brushless motor 30 is performed by the following six drive controls (1st to 6th drive controls) in the low (Lo) output mode or the high (Hi) output mode to obtain the rotation frequency of the rotor 22.
- the corresponding operating sound is FFT (Fast) in the frequency band (0 to 15 KHz). Fourier Transform) It shows the A (Over All) value.
- O The A value is a value used when simply evaluating whether the sound is noisy or quiet without paying attention to the frequency characteristics.
- FIG. 10 shows that the drive control of the brushless motor 30 is performed by the following six drive controls (1st to 6th drive controls) in the low (Lo) output mode or the high (Hi) output mode to obtain the rotation frequency of the rotor 22.
- the corresponding operating sound is FFT (Fast) in the frequency band (0 to
- the drive control of the brushless motor 30 is performed by the following six drive controls (first to sixth drive controls) in the low output mode or the high output mode, and the operating sound corresponding to the rotation frequency of the rotor 22.
- the magnetic sound is measured when the rotation frequency of the rotor 22 is 530 Hz to 590 Hz (Lo output mode) or when the rotation frequency is 790 Hz to 850 Hz (Hi output mode).
- the first drive control is a drive control performed by a rectangular wave drive in the low output mode, and corresponds to the rectangular wave drive of Patent Document 1.
- the second drive control is a drive control performed by a third harmonic drive (sine wave drive) in the low output mode, and is supported by Patent Document 2 and the sine wave drive of the present embodiment.
- the third drive control is a drive control performed by rectangular wave energization (wide-angle energization) in the high output mode, and corresponds to the rectangular wave drive of Patent Document 2.
- the fourth drive control is a drive control performed by a wide-angle trapezoidal wave energization drive (sine wave drive) in the high output mode, and corresponds to the sine wave drive of the present embodiment.
- the fifth drive control is a drive control performed by a wide-angle trapezoidal wave + energization drive (sine wave drive) of "advance angle 10 °" in the high output mode, and corresponds to the sine wave drive of the present embodiment.
- the sixth drive control is a drive control performed by a wide-angle trapezoidal wave + energization drive (sine wave drive) of "advance angle 30 °" in the high output mode, and corresponds to the sine wave drive of the present embodiment.
- the drive control is performed by the wide-angle trapezoidal wave energization drive in the high output mode, and the drive control is performed by the square wave energization (wide-angle energization) in the high output mode (square wave energization of Patent Document 2). (Wide-angle energization)), the operating noise can be suppressed. That is, it can be said that the above object 2 has been achieved.
- the drive control unit 64 When the drive control unit 64 acquires a stop signal from the mode determination unit 63, the drive control unit 64 stops the drive of the brushless motor 30 by the first drive control unit 641 or the second drive control unit 642. That is, when the drive control unit 64 acquires the stop signal from the mode determination unit 63, the drive control unit 64 stops the drive of the brushless motor 30 and stops the swinging operation of the wiper arms 14 and 16.
- the inverter 52 generates a second energization signal in the high output mode.
- the duty of the applied voltage applied from the inverter 52 to each phase of the armature coils 21u, 21v, 21w is set to FET_Duty [%], and the control unit 54 (second drive control unit 642) applies to the inverter 52.
- the duty indicated by the command value of the applied voltage applied to each phase by the inverter 52 included in the output instruction signal is expressed as Software_Duty [%].
- the motor control device 33 has a FET_Duty of about 100% at the peak of the third harmonic superimposed wave and a FET_Duty of about 0% at the valley, as shown in FIG. It is set.
- the second energization signal is a wide-angle trapezoidal wave. That is, in the second energization signal, in the waveform in which the amplitude of the first energization signal is changed to a value larger than 50% in FET_Duty, the energization section in which FET_Duty is 100% or more has FET_Duty of 100% and FET_Duty.
- the energized section of 0% or less is a waveform with FET_Duty set to 0%.
- the motor control device 33 has a FET_Duty value larger than 100% in the peak of the third harmonic superimposed wave (for example, a duty exceeding 100% and a range of up to about 130%).
- the duty is set to be less than 0% in the valley (for example, the duty is less than 0% and any duty in the range up to about -30%). .
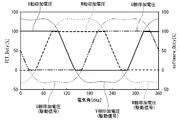
- FIG. 12 is a timing chart showing the energization timings of the U, V, and W phases by the second drive control unit 642 in the present embodiment.
- FIG. 13 is a timing chart showing variations of the software (software) in the present embodiment.
- the angles from 0 ° to 360 ° shown on the horizontal axes of FIGS. 12 and 13 are electric angles representing the energization period within one cycle of the second energization signal as in FIGS. 7A to 7D.
- the first vertical axis (the vertical axis on the left side in the figure) represents FET_Duty [%].
- the second vertical axis (vertical axis on the right side in the figure) represents software_Duty [%].
- FIG. 12 is recognized by the software (software) used when the inverter 52 performs the control operation by the command of the control unit 54 and the FET that applies the applied voltage to each of the U, V, and W phases.
- An example is shown when the scales are different.
- FET_Duty [%] 80 to 100%
- FET_Duty [%] 100 to 130%
- the apparent FET_Duty [%] (duty of the applied voltage actually applied to each phase) is It is 100% as shown by the thick line in FIG.
- FIG. 13 shows an example in which the software (software) used when the inverter 52 performs the control operation by the command of the control unit 54 is capable of outputting 100% or more of the duty.
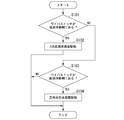
- FIG. 14 is a diagram illustrating a processing flow of the control unit 54 in the present embodiment.
- FIG. 15 is a diagram illustrating a modified example of FIG. 14 in the present embodiment.
- the control unit 54 determines whether or not the wiper switch 37 has been operated by the driver on the low-speed operation side (step S101). For example, when the control unit 54 acquires the low-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the low-speed operation side. When the wiper switch 37 is operated to the low-speed operation side by the driver, the control unit 54 drives the brushless motor 30 to energize the third harmonic (step S102).
- the control unit 54 determines whether or not the wiper switch 37 is operated on the high speed operation side (step S103). For example, when the control unit 54 acquires the high-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the high-speed operation side.
- the control unit 54 drives the brushless motor 30 with a wide-angle trapezoidal wave energization when the wiper switch 37 is operated to the high-speed operation side by the driver (step S104).
- the processing flow of the control unit 54 in the present embodiment shown in FIG. 14 may be the processing flow of the control unit 54 shown in FIG.
- the control unit 54 determines whether or not the wiper switch 37 has been operated by the driver on the low-speed operation side (step S201). For example, when the control unit 54 acquires the low-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the low-speed operation side. The control unit 54 determines whether or not the high output mode is necessary when the wiper switch 37 is operated to the low speed operation side by the driver (step S202). When the control unit 54 determines that the high output mode is not necessary, the control unit 54 drives the brushless motor 30 to energize the third harmonic (step S203).
- the control unit 54 determines whether or not the wiper switch 37 is operated on the high speed operation side (step S204). For example, when the control unit 54 acquires the high-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the high-speed operation side. The control unit 54 determines whether or not the high output mode is necessary when the wiper switch 37 is operated by the driver to the high-speed operation side (step S205). When the control unit 54 determines that the high output mode is necessary, the control unit 54 drives the brushless motor 30 by energizing a wide-angle trapezoidal wave (step S206).
- control unit 54 determines that the wiper switch 37 has been operated to the low speed operation side in the process of step S201 and determines that the high output mode is necessary in the process of step S202
- the control unit 54 causes the brushless motor 30 to have a wide-angle trapezoidal wave. Energized drive.
- the brushless motor 30 is tertiary. Harmonic energization drive.
- control unit 54 can appropriately switch between the low output mode and the high output mode regardless of whether the wiper switch 37 is on the low speed operation side or the high speed operation side. This makes it possible to respond to changes in the external environment such as changes in rainfall and changes in the conditions on the windshield 11 (wiping surface) due to changes in vehicle speed.
- the motor control device 33 drives the brushless motor 30 to energize the third harmonic in the low output mode in which the output of the brushless motor 30 is low, and the output is higher than the low output mode in the high output mode.
- the brushless motor 30 is energized by a wide-angle trapezoidal wave energization drive.
- the motor control device 33 is driven by the third harmonic energization drive in the frequently used low-speed operation mode, so that the operation noise is more efficient than the rectangular wave energization control described in Patent Document 1. It can be reduced (see FIG. 11).
- the motor control device 33 is driven by wide-angle trapezoidal wave energization to further improve the motor characteristics as compared with the sine wave drive in the low-speed operation mode, and is required in the high-speed operation mode.
- the motor characteristics to be achieved can be satisfied (see FIG. 9).
- the rectangular wave energization control (wide-angle energization drive) described in Patent Document 2 it is possible to efficiently reduce the operating noise (see FIG. 11).
- the motor unit 19 including the brushless motor 30 which is a brushless wiper motor for swinging the wiper arm and the motor control device 33 has been described. It may be a motor unit composed of the following brushless motor and motor control device.
- a brushless motor which is a brushless sunroof motor that opens and closes the roof panel provided on the roof of the vehicle, and a motor control to which the switching control in the present embodiment is applied according to when the vehicle is stopped (low load) and when the vehicle is running (high load).
- a sunroof motor unit consisting of a device.
- the brushless motor which is a brushless power seat motor that drives the vehicle seat, and the fine adjustment of the seat position (seat position, angle adjustment) perform energization drive by the first energization signal (applied voltage), and the seat position is significantly changed (seat position, angle adjustment).
- a power seat consisting of a motor control device that performs energization drive by a second energization signal (applied voltage) and controls switching between both energizations. Motor unit.
- a brushless motor which is a brushless fan motor used as a drive source for a radiator cooling device of a vehicle, and a brushless motor, which corresponds to variable speed, are driven by a first energization signal and a second energization signal to control switching between both energizations.
- a fan motor unit consisting of a motor control device to perform.
- Power slide door motor unit A brushless power slide door motor used as an electric motor for opening and closing the sliding door of a vehicle, and a motor control device that performs energization drive by a first energization signal and a second energization signal and controls switching between both energizations. Power slide door motor unit composed of.
- the sunroof unit includes a sunroof and a sunroof operator that opens and closes the sunroof.
- the control unit 54 acquires an operation signal corresponding to the operation of the sunroof operator from the sunroof operator, and opens and closes the sunroof according to the acquired operation signal.
- the sunroof operator may be, for example, a switch that specifies which operation of opening / closing is performed, or an operation panel such as a touch panel.
- FIG. 16 is a diagram illustrating a modified example of the processing flow of the control unit 54 when the motor unit 19 is applied to the sunroof unit.
- the control unit 54 acquires an operation signal from the sunroof operator, and the acquired operation signal is an operation signal for performing a tilt-up operation or an operation signal for performing a close operation. Whether or not it is determined (step S301).
- the control unit 54 drives the brushless motor 30 with a wide-angle trapezoidal wave energization for the tilt-up operation or the close operation. (Step S302).
- the operation signal indicates a tilt-up operation
- the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the tilt-up operation.
- the operation signal indicates a close operation
- the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation.
- the tilt-up operation is, for example, an operation in which the sunroof is tilted upward to open
- the closing operation is an operation in which the sunroof is closed.
- step S301 when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S301-NO), the control unit 54 determines that the operation signal is an operation signal for performing a tilt-down operation or open. It is determined whether the operation signal is to be operated (step S303). When the operation signal is an operation signal for performing a tilt-down operation or an operation signal for performing an open operation (step S303-YES), the control unit 54 performs a tilt-down operation or an open operation to drive the motor unit 19 to a third harmonic energization. (Step S304).
- the control unit 54 performs the tilt-down operation by driving the motor unit 19 to energize the third harmonic.
- the control unit 54 performs an open operation by driving the motor unit 19 with a third harmonic energization.
- the tilt-down operation is an operation of closing the sunroof by returning the tilt of the tilted-up sunroof to its original position
- an open operation is an operation of opening the sunroof by moving it to a fully open position.
- step S303 when the operation signal is not the operation signal for tilting down operation or the operation signal for opening operation (step S303-NO), the control unit 54 has made an unexpected operation input, such as failure or emergency. It is determined that the drive is stopped or the like, and the drive is stopped (step S305). As described above, the control unit 54 performs the wide-angle trapezoidal wave energization drive in the tilt-up operation or the close operation, and performs the third harmonic energization drive in the tilt-down operation or the open operation.
- the motor unit 19 can be smoothly operated even in such a situation.
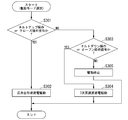
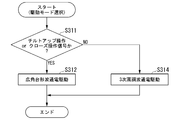
- FIG. 17 is a diagram illustrating a modified example of the processing flow of the control unit 54 when the motor unit 19 is applied to the sunroof unit.
- the control unit 54 acquires an operation signal from the sunroof operator, and whether the acquired operation signal is an operation signal for tilting up operation or an operation signal for closing operation. It is determined whether or not (step S311).
- the control unit 54 drives the brushless motor 30 with a wide-angle trapezoidal wave energization for the tilt-up operation or the close operation. (Step S312).
- the control unit 54 performs the tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization.
- the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation.
- step S311 when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S311-NO), the control unit 54 performs an operation according to the operation content to the motor unit 19. This is executed by driving the third harmonic energization (step S314).
- step S3114 there are only four types of operation contents, “tilt up”, “close”, “chilled down”, and “open”, and when accepting any operation input among them, it is determined as NO in step S311. If this is the case, either "tilt down” or "open” operation may be executed. Therefore, the control unit 54 can perform a tilt-down operation or an open operation by performing a third-order harmonic energization drive when the operation is determined to be NO in step S311.
- FIG. 18 is a diagram illustrating a modified example of the processing flow of the control unit 54 when the motor unit 19 is applied to the sunroof unit.
- the control unit 54 acquires an operation signal from the sunroof operator, and whether the acquired operation signal is an operation signal for tilting up operation or an operation signal for closing operation. It is determined whether or not (step S321).
- the control unit 54 detects the vehicle speed or the load of the brushless motor 30 of the motor unit 19, and uses the detection result as a result. Based on this, it is determined whether or not the high output mode is required (step S322). In this determination, for example, it is determined whether or not the vehicle speed exceeds the vehicle speed reference value, or whether or not the load of the brushless motor 30 exceeds the load reference value. This determination may be made based on only one of them.
- the vehicle speed reference value and the load reference value may be stored in advance in a storage device inside or outside the control unit 54, and may be referred to.
- the control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S322-YES), and tilts.
- the up operation or the close operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S322).
- the control unit 54 performs the tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization.
- the operation signal indicates a close operation
- the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation.
- the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S322-NO).
- the tilt-up operation or the close operation is executed by driving the brushless motor 30 to energize the third harmonic (step S326).
- the control unit 54 performs the tilt-up operation by driving the motor unit 19 to energize the third harmonic.
- the motor unit 19 is driven to energize the third harmonic to perform the close operation.
- step S321 when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S321-NO), the control unit 54 determines that the operation signal is an operation signal for performing a tilt-down operation or open. It is determined whether the operation signal is to be operated (step S324). When the operation signal is an operation signal for tilting down operation or an operation signal for performing open operation (step S324-YES), the vehicle speed or the load of the brushless motor 30 of the motor unit 19 is detected, and a high output is obtained based on the detection result. It is determined whether or not the mode is in a required state (step S325).
- the control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S325-YES), and tilts.
- the down operation or the open operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S323).
- the control unit 54 performs the tilt-down operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization.
- the operation signal indicates an open operation
- the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the open operation.
- the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S325-NO). , The control unit 54 executes the tilt-down operation or the open operation by driving the motor unit 19 to energize the third harmonic (step S326). As a result, when the operation signal indicates a tilt-down operation, the control unit 54 performs the tilt-down operation by driving the motor unit 19 to energize the third harmonic. When the operation signal indicates an open operation, the control unit 54 performs an open operation by driving the motor unit 19 with a third harmonic energization.
- step S324 when the operation signal is not an operation signal for performing a tilt-down operation or an operation signal for performing an open operation (step S324-NO), the control unit 54 has made an unexpected operation input, such as a failure or an emergency. It is determined that the drive is stopped or the like, and the drive is stopped (step S325). As described above, the control unit 54 can drive the motor unit 19 by the third harmonic energization drive if the high output mode is not required even when the tilt-up operation or the close operation is performed. Further, the control unit 54 can perform wide-angle trapezoidal wave energization drive if a high output mode is required even in the tilt-down operation or the open operation.
- FIG. 19 is a diagram illustrating a modified example of the processing flow of the control unit 54 when the motor unit 19 is applied to the sunroof unit.
- the control unit 54 acquires an operation signal from the sunroof operator, and whether the acquired operation signal is an operation signal for tilting up operation or an operation signal for closing operation. It is determined whether or not (step S331).
- the control unit 54 detects the vehicle speed or the load of the brushless motor 30 of the motor unit 19, and uses the detection result as a result. Based on this, it is determined whether or not the high output mode is required (step S332). In this determination, for example, it is determined whether or not the vehicle speed exceeds the vehicle speed reference value, or whether or not the load of the brushless motor 30 exceeds the load reference value. This determination may be made based on only one of them.
- the vehicle speed reference value and the load reference value may be stored in advance in a storage device inside or outside the control unit 54, and may be referred to.
- the control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S332-YES), and tilts.
- the up operation or the close operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S333).
- the control unit 54 performs the tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization.
- the operation signal indicates a close operation
- the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation.
- the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S332-NO).
- the tilt-up operation or the close operation is executed by driving the brushless motor 30 to energize the third harmonic (step S335).
- the control unit 54 performs the tilt-up operation by driving the motor unit 19 to energize the third harmonic.
- the motor unit 19 is driven to energize the third harmonic to perform the close operation.
- the third harmonic energization drive even in the tilt-up operation and the close operation, if it is not necessary to be in the high output mode, it can be driven by the third harmonic energization drive.
- step S331 when the operation signal is not an operation signal for tilting up operation or an operation signal for closing operation (step S331-NO), the control unit 54 applies the vehicle speed or the load of the brushless motor 30 of the motor unit 19. It is detected, and based on the detection result, it is determined whether or not the high output mode is required (step S334).
- the control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S334-YES), and tilts.
- the down operation or the open operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S333).
- the control unit 54 performs the tilt-down operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization.
- the control unit 54 performs an open operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization.
- the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S334-NO). , The control unit 54 executes the tilt-down operation or the open operation by driving the motor unit 19 to energize the third harmonic (step S326). As a result, when the operation signal indicates a tilt-down operation, the control unit 54 performs the tilt-down operation by driving the motor unit 19 to energize the third harmonic. When the operation signal indicates an open operation, the control unit 54 performs an open operation by driving the motor unit 19 with a third harmonic energization. According to this modification, when the control unit 54 determines NO in step S331, it is not necessary to perform the determination step as to whether it is the tilt-down operation or the open operation shown in step S324 of FIG.
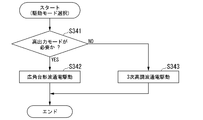
- FIG. 20 is a diagram illustrating a modified example of the processing flow of the control unit 54 when the motor unit 19 is applied to the sunroof unit.
- the control unit 54 acquires an operation signal from the sunroof operator, detects the vehicle speed or the load of the brushless motor 30 of the motor unit 19, and outputs a high output based on the detection result. It is determined whether or not the mode is in a required state (step S341). In this determination, for example, it is determined whether or not the vehicle speed exceeds the vehicle speed reference value, or whether or not the load of the brushless motor 30 exceeds the load reference value. This determination may be made based on only one of them.
- the vehicle speed reference value and the load reference value may be stored in advance in a storage device inside or outside the control unit 54, and may be referred to.
- the control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S341-YES), and operates.
- the operation corresponding to the signal is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S342).
- the control unit 54 performs a tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization, and when the operation signal indicates a close operation, the motor unit 19 Is driven by a wide-angle trapezoidal wave energization to perform a closing operation.
- the control unit 54 performs a tilt-down operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization, and when the operation signal indicates an open operation, the motor unit 19 Is driven by a wide-angle trapezoidal wave energization to perform open operation.
- the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S341-NO). , The operation according to the operation signal is executed by driving the brushless motor 30 to energize the third harmonic (step S343).
- the control unit 54 performs a tilt-up operation by driving the motor unit 19 by energizing the third harmonic, and when the operation signal indicates a close operation, the motor unit The closing operation is performed by driving 19 with a third harmonic energization.
- the control unit 54 when the operation signal indicates a tilt-down operation, the control unit 54 performs a tilt-down operation by driving the motor unit 19 to energize the third harmonic, and when the operation signal indicates an open operation, the motor unit 54 performs a tilt-down operation.
- the open operation is performed by driving 19 with a third harmonic energization.
- the control unit 54 energizes the wide-angle trapezoidal wave based on the determination result of whether or not the high output mode is required, not the type of the operation content in which the sunroof operator is operated by the driver. It is possible to decide whether to perform the drive or the third harmonic energization drive. On top of that, the sunroof can be controlled according to the operation content.
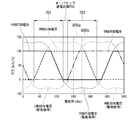
- FIGS. 21A to 21C are diagrams showing the results of experiments on the operation of the motor unit 19.
- the angles from 0 ° to 360 ° shown on the horizontal axis of FIGS. 21A to 21C are electric angles representing the energization period within one cycle of the second energization signal.
- FET_Duty [%] shown on the vertical axis represents the applied voltage applied to each phase.
- FIG. 21A is a timing chart showing the energization timings of the U, V, and W phases by the second drive control unit 642 in the present embodiment.
- 21A shows the waveform of the second energization signal, which is the applied voltage of each of the three phases in which the third harmonic is superimposed on the sine wave, and the energization section in which FET_Duty [%] is 100% or more.
- the waveform when the wide-angle trapezoidal wave is energized so that (hereinafter referred to as 100% energization angle) (reference numeral 215) is 110 ° is shown.
- the applied voltage is applied to any two of the three phases of U phase, V phase, and W phase (at least one of V phase and W phase, W phase and U phase, and U phase and V phase).
- the duty value when the duty is the same is about 90% (reference numeral 210).
- any two phases (V phase and W phase, W phase and U phase, U phase) of the three phases of U phase, V phase, and W phase are used. And at least one of the V phases), the duty value when the duty of the applied voltage becomes the same is about 80% (reference numeral 600). Therefore, the duty value when the duty of the applied voltage becomes the same is larger in the second energization signal (second control mode) than in the first energization signal (first control mode).
- FIG. 21B is a timing chart showing the energization timings of the U, V, and W phases by the second drive control unit 642 in the present embodiment.
- FIG. 21B shows the waveform of the second energization signal, and shows the waveform when the wide-angle trapezoidal wave energization drive is performed so that the 100% energization angle (reference numeral 216) is 130 °.
- the application is applied to any two of the three phases of the U phase, the V phase, and the W phase (at least one of the V phase and the W phase, the W phase and the U phase, and the U phase and the V phase).
- the duty value when the voltage duty is the same is about 100% (reference numeral 211).
- the duty value when the duty of the applied voltage is the same for any two of the three phases is about 80%.
- the duty value when the duty of the applied voltage is the same for any two of the three phases is about 100%. Therefore, the duty value when the duty of the applied voltage becomes the same is larger in the second energization signal (second control mode) than in the first energization signal (first control mode).
- FIG. 21C is a timing chart showing the energization timings of the U, V, and W phases by the second drive control unit 642 in the present embodiment.
- FIG. 21C shows the waveform of the second energization signal, and shows the waveform when the wide-angle trapezoidal wave energization drive is performed so that the 100% energization angle (reference numeral 217) is 155 °.
- the second energization signal has an overlap energization section.
- the application is applied to any two of the three phases of the U phase, the V phase, and the W phase (at least one of the V phase and the W phase, the W phase and the U phase, and the U phase and the V phase).
- the duty value when the voltage duty becomes the same is about 120% (reference numeral 212), and the apparent FET_Duty [%] of the two phases are both 100% in the overlap energization section.
- the duty value when the applied voltage duty is the same for any two of the three phases is about 80.
- the duty value when the duty of the applied voltage is the same for any two of the three phases is about 120%. Is. Therefore, the duty value when the duty of the applied voltage becomes the same is the second energization signal (first energization signal) rather than the first energization signal (first control mode) even when the energization angle is expanded to 155 °. 2 control mode) is larger.
- control unit 54 drives the second energization signal so that the current consumption and the motor output have a target balance when the 100% energization angle is controlled in the range of 110 ° to 155 °. It becomes possible. For example, when the current consumption is preferentially controlled among the current consumption and the motor output, the 100% energization angle may be set to a value closer to 110 ° in the range of 110 ° to 155 °, and 110 °. When set to, the current consumption can be further reduced. On the other hand, when controlling the current consumption and the motor output with priority given to improving the motor output, the 100% energization angle may be set to a value closer to 155 ° in the range of 110 ° to 155 °. Well, when it is set to 155 °, the motor output can be further improved.
- FIG. 22 is a diagram showing the relationship between the current consumption and the 100% energization angle in the second energization signal.
- the vertical axis represents the current consumption and the horizontal axis represents the 100% energization angle.
- the current consumption was the smallest when the 100% energization angle was set to 110 °.
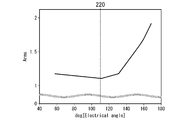
- FIG. 23 is a diagram showing the relationship between the rotation speed of the motor and the 100% energization angle when the 100% energization angle is set to 155 ° in the second energization signal.
- the vertical axis represents the rotation speed of the motor
- the horizontal axis represents the 100% energization angle.
- the rotation speed of the motor became the largest, that is, the motor output became the largest when the 100% energization angle was set to 155 °.
- the rotation speed of the motor increases as it approaches 155 °, the rotation speed becomes the largest at 155 °, and the rotation speed decreases when it exceeds 155 °.
- the retarding wave causes a drag torque (a force that tries to rotate the rotor in the opposite direction), so that the rotation speed is lower than the peak value.
- the motor control device 33 determines the rotation position of the rotor 22 based on the pulse signal supplied from the rotation angle detection unit 39, but the present invention is not limited to this.
- the motor control device 33 may determine the rotation position of the rotor 22 based on the induced voltage generated in each armature coil 21u, 21v, 21w according to the rotation of the rotor 22. This eliminates the need for the rotation angle detection unit 39 that detects the rotation position of the rotor 22, so that the number of parts and the manufacturing cost of the brushless motor 30 can be reduced.
- the wiper device 12 may include an output shaft sensor that detects at least one of the rotation speed and the absolute position of the output shaft 26.
- the absolute position is the rotation angle of the output shaft 26 with respect to the reference position.
- the reference position may be set at any position within the range of 360 degrees.
- the motor control device 33 may determine the rotation position of the rotor 22 based on the detection signal from the output shaft sensor.
- the wiper device 12 is not limited to the windshield 11 of the vehicle 10, and may wipe the rear glass. Further, the wiper device 12 may have a structure in which the wiper arms 14 and 16 swing around the output shaft 26 as a fulcrum.
- the wiper device 12 may be configured to drive the two wiper arms 14 and 16 by different brushless motors.
- the brushless motor 30 of the present embodiment may be a motor having an IPM (Interior Permanent Magnet) structure or a motor having an SPM (Surface Permanent Magnet) structure.
- the mode selected by the wiper switch 37 is not limited to two types of the low-speed operation mode and the high-speed operation mode, and may be three or more types.
- the mode selected by the wiper switch 37 may be three types, a low speed operation mode, a medium speed operation mode, and a high speed operation mode.
- the rotation speed of the rotor 22 in the medium speed operation mode is higher than the rotation speed of the rotor 22 in the low speed wiping mode, and is lower than the rotation speed of the rotor 22 in the high speed operation mode.
- the motor control device 33 may perform a third harmonic energization drive on the brushless motor 30 or a wide-angle trapezoidal wave energization drive.
- a third harmonic energization drive on the brushless motor 30 or a wide-angle trapezoidal wave energization drive.
- the wide-angle trapezoidal wave energization drive or the wide-angle trapezoidal wave + "advance angle>0" ° ” The energization drive may be performed.
- the operation mode may be changed based on the detection result from the raindrop sensor instead of the wiper switch 37.
- a raindrop sensor has a function of detecting a rainfall situation around a vehicle and is attached to the vehicle. Based on the detection result from the raindrop sensor, the low-speed operation mode may be set when the rainfall is less than the reference value, and the high-speed operation mode may be switched when the rainfall exceeds the reference value. Further, by providing three reference values for rainfall, it may be possible to switch to one of three types: low-speed operation mode, medium-speed operation mode, and high-speed operation mode.
- the control unit 54 in the above-described embodiment may be realized by a computer.
- a program for realizing this function may be recorded on a computer-readable recording medium, and the program recorded on the recording medium may be read by a computer system and executed.
- the term "computer system” as used herein includes hardware such as an OS and peripheral devices.
- the "computer-readable recording medium” refers to a portable medium such as a flexible disk, a magneto-optical disk, a ROM, or a CD-ROM, or a storage device such as a hard disk built in a computer system.
- a "computer-readable recording medium” is a communication line for transmitting a program via a network such as the Internet or a communication line such as a telephone line, and dynamically holds the program for a short period of time. It may also include a program that holds a program for a certain period of time, such as a volatile memory inside a computer system that serves as a server or a client in that case. Further, the above program may be for realizing a part of the above-mentioned functions, and may be further realized for realizing the above-mentioned functions in combination with a program already recorded in the computer system. It may be realized by using a programmable logic device such as FPGA (Field Programmable Gate Array).
- FPGA Field Programmable Gate Array
- the load determination unit 62 detects when the vehicle speed V measured by the vehicle speed sensor 40 exceeds a predetermined value Vth or is based on a pulse signal supplied from the rotation angle detection unit 39.
- the rotation speed or the predetermined value of the rotor 22 exceeds the preset predetermined value, it is determined that the load of the brushless motor 30 is high, but the load is not limited to this.
- the rotation speed (rotation speed) of the rotor 22 is set from the preset target rotation speed (target rotation speed). It will decrease (shift).
- the control unit 54 increases the Duty value within the range of the low output mode in order to match the rotation speed (rotation speed) of the rotor 22 with the preset target rotation speed (target rotation speed). Then, when the control unit 54 recognizes that the duty value exceeds a predetermined threshold value, the mode may shift from the low output mode to the high output mode.
Abstract
A motor control device for controlling a brushless motor comprising a rotor and a three-phase armature coil, said motor control device comprising: a position detection unit, which detects the rotational position of the rotor; a control unit (54), which, in a first or second control mode, outputs a first or second drive signal to an inverter (52) at a current-supply time based on the rotational position of the rotor; and the inverter (52), which outputs a first or second current-supply signal to the three-phase armature coil when the first or second drive signal is input, wherein for any two of the three phases, a duty value when the duty of the applied voltages is the same is larger in the second control mode than in the first control mode.
Description
本発明は、モータ制御装置、モータ制御方法及びモータユニットに関する。
The present invention relates to a motor control device, a motor control method, and a motor unit.
従来から、車両に搭載されるワイパ装置には、ワイパアームを揺動させるための駆動源としてワイパモータ(ブラシレスモータ)が用いられている。ワイパ装置は、ワイパモータを駆動することで、ワイパアームをフロントガラス上における所定の範囲内で揺動動作させ、フロントガラスに付着した埃や雨滴等を払拭する。
Conventionally, a wiper motor (brushless motor) has been used as a drive source for swinging the wiper arm in a wiper device mounted on a vehicle. By driving the wiper motor, the wiper device swings the wiper arm within a predetermined range on the windshield to wipe off dust and raindrops adhering to the windshield.
一般に、ワイパ装置は、ワイパモータを低速で駆動することでワイパブレードを低速で動作させる低速(Lo)作動モードと、ワイパモータを高速で駆動することでワイパブレードを高速で動作させる高速(Hi)作動モードと、を備える(例えば、特許文献1、特許文献2を参照)。
Generally, the wiper device has a low speed (Lo) operation mode in which the wiper blade is operated at a low speed by driving the wiper motor at a low speed and a high speed (Hi) operation mode in which the wiper blade is operated at a high speed by driving the wiper motor at a high speed. (See, for example, Patent Document 1 and Patent Document 2).
特許文献1に記載のワイパ装置では、ブラシレスモータに通電する駆動制御を、低速作動モードにおいては、矩形波駆動とし、高速作動モードにおいては、進角・広角通電駆動としている。
なお、進角・広角通電駆動とは、低速作動モードにおける矩形波駆動よりも通電角を大きくし、進角させたタイミングでブラシレスモータに通電する駆動を言う。 In the wiper device described inPatent Document 1, the drive control for energizing the brushless motor is a rectangular wave drive in the low-speed operation mode and an advance / wide-angle energization drive in the high-speed operation mode.
The advance angle / wide-angle energization drive refers to a drive in which the energization angle is made larger than that of the rectangular wave drive in the low-speed operation mode and the brushless motor is energized at the timing of the advance angle.
なお、進角・広角通電駆動とは、低速作動モードにおける矩形波駆動よりも通電角を大きくし、進角させたタイミングでブラシレスモータに通電する駆動を言う。 In the wiper device described in
The advance angle / wide-angle energization drive refers to a drive in which the energization angle is made larger than that of the rectangular wave drive in the low-speed operation mode and the brushless motor is energized at the timing of the advance angle.
また、特許文献2に記載のワイパ装置では、ブラシレスモータに通電する駆動制御を、低速作動モードにおいては、正弦波駆動制御とし、高速作動モードにおいては、進角・広角通電駆動としている。
これにより、特許文献2に記載のワイパ装置の制御では、特許文献1に記載のワイパ装置の制御に比べて、低速作動モードにおけるブラシレスモータの作動音を低減(静音化)することが可能となっている(特許文献2の段落[0037]、[0048]および[0056]参照)。 Further, in the wiper device described inPatent Document 2, the drive control for energizing the brushless motor is a sine wave drive control in the low-speed operation mode and an advance / wide-angle energization drive in the high-speed operation mode.
As a result, in the control of the wiper device described inPatent Document 2, the operating noise of the brushless motor in the low speed operation mode can be reduced (silenced) as compared with the control of the wiper device described in Patent Document 1. (See paragraphs [0037], [0048] and [0056] of Patent Document 2).
これにより、特許文献2に記載のワイパ装置の制御では、特許文献1に記載のワイパ装置の制御に比べて、低速作動モードにおけるブラシレスモータの作動音を低減(静音化)することが可能となっている(特許文献2の段落[0037]、[0048]および[0056]参照)。 Further, in the wiper device described in
As a result, in the control of the wiper device described in
しかしながら、ワイパ装置などの車両用電装装置では、消費電流の低減やモータ出力の向上などを考慮し柔軟にモータ制御をすることが望ましい。
However, in vehicle electrical equipment such as wiper equipment, it is desirable to flexibly control the motor in consideration of reduction of current consumption and improvement of motor output.
本発明は、上記事情を考慮してなされたものであり、消費電流の低減とモータ出力の向上との少なくともいずれか一方を考慮しつつ、柔軟なモータ制御をすることができる。モータ制御装置、モータ制御方法及びモータユニットを提供することを主要な目的とする。
The present invention has been made in consideration of the above circumstances, and flexible motor control can be performed while considering at least one of reduction of current consumption and improvement of motor output. The main purpose is to provide a motor control device, a motor control method and a motor unit.
上記課題を解決するため、本発明の一態様は、回転子およびU相、V相、W相の3相の電機子コイルを備えるブラシレスモータを制御するモータ制御装置であって、前記回転子の回転位置を検出する位置検出部と、第1の制御モードと第2の制御モードとを選択可能であり、前記第1の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで第1駆動信号をインバータに出力し、前記第2の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで第2駆動信号を前記インバータに出力する制御部と、前記第1の制御モードにおいて、前記3相の電機子コイルへの印加電圧として第1通電信号を出力し、前記第2の制御モードにおいて、前記3相の電機子コイルへの印加電圧として第2通電信号を出力する前記インバータと、を備え、前記3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、前記第1の制御モードよりも前記第2の制御モードの方が大きいモータ制御装置である。
In order to solve the above problems, one aspect of the present invention is a motor control device for controlling a brushless motor including a rotor and three-phase armature coils of U-phase, V-phase, and W-phase, and the rotor. The position detection unit that detects the rotation position, the first control mode, and the second control mode can be selected. In the first control mode, the first is performed at the energization timing according to the rotation position of the rotor. In the second control mode, a control unit that outputs a drive signal to the inverter and outputs a second drive signal to the inverter at an energization timing corresponding to the rotation position of the rotor, and in the first control mode. With the inverter that outputs the first energization signal as the applied voltage to the three-phase armature coil and outputs the second energization signal as the applied voltage to the three-phase armature coil in the second control mode. , And the duty value when the duty of the applied voltage is the same for any two of the three phases is larger in the second control mode than in the first control mode. It is a control device.
本発明によれば、消費電流の低減とモータ出力の向上との少なくともいずれか一方を考慮しつつ、柔軟なモータ制御をすることができる。
また、本発明の他の一実施態様によれば、高速作動モード(第2の制御モード)において、第2通電信号が入力されることにより、ブラシレスモータを正弦波駆動するので、高速作動モードにおけるブラシレスモータの作動音を抑制することが可能になる。 According to the present invention, flexible motor control can be performed while considering at least one of reduction of current consumption and improvement of motor output.
Further, according to another embodiment of the present invention, in the high-speed operation mode (second control mode), the brushless motor is driven in a sine wave by inputting the second energization signal. It is possible to suppress the operating noise of the brushless motor.
また、本発明の他の一実施態様によれば、高速作動モード(第2の制御モード)において、第2通電信号が入力されることにより、ブラシレスモータを正弦波駆動するので、高速作動モードにおけるブラシレスモータの作動音を抑制することが可能になる。 According to the present invention, flexible motor control can be performed while considering at least one of reduction of current consumption and improvement of motor output.
Further, according to another embodiment of the present invention, in the high-speed operation mode (second control mode), the brushless motor is driven in a sine wave by inputting the second energization signal. It is possible to suppress the operating noise of the brushless motor.
以下、発明の実施の形態を通じて本発明の態様を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。なお、図面において、同一又は類似の部分には同一の符号を付して、重複する説明を省く場合がある。
Hereinafter, aspects of the present invention will be described through embodiments of the invention, but the following embodiments do not limit inventions within the scope of claims. Also, not all combinations of features described in the embodiments are essential to the means of solving the invention. In the drawings, the same or similar parts may be designated by the same reference numerals to omit duplicate explanations.
本実施形態のモータ制御装置は、ワイパアームを揺動動作させるブラシレスモータを制御する。そして、モータ制御装置は、ブラシレスモータの出力が低い低出力モード(第1の制御モード)においては、ブラシレスモータを正弦波に高調波を重畳させた正弦波(第1通電信号)により通電し、低出力モードよりも出力が高い高出力モード(第2の制御モード)においては、ブラシレスモータを、第1通電信号を広角台形波にした正弦波(第2通電信号)により通電する。以下に、本実施形態におけるモータ制御装置について、図を用いて説明する。
The motor control device of this embodiment controls a brushless motor that swings the wiper arm. Then, in the low output mode (first control mode) in which the output of the brushless motor is low, the motor control device energizes the brushless motor by a sine wave (first energization signal) in which harmonics are superimposed on the sine wave. In the high output mode (second control mode), which has a higher output than the low output mode, the brushless motor is energized by a sine wave (second energization signal) in which the first energization signal is a wide-angle trapezoidal wave. Hereinafter, the motor control device according to the present embodiment will be described with reference to the drawings.
図1は、本実施形態におけるモータ制御装置を備えたワイパ装置12を搭載した車両10のフロントガラス11を示す概略構成の一例を示す図である。
図1に示すように、車両10は、フロントガラス11及びワイパ装置12を備える。
ワイパ装置12は、フロントガラス11を払拭する。
ワイパ装置12は、ワイパアーム14,16、ワイパブレード17,18、モータユニット19及び動力伝達機構20を備える。
ワイパアーム14は、ピボット軸13を中心として揺動する。ワイパアーム16は、ピボット軸15を中心として揺動する。
ワイパブレード17は、ワイパアーム14の自由端に取り付けられている。ワイパブレード18は、ワイパアーム16の自由端に取り付けられている。
モータユニット19は、ワイパアーム14,16を駆動する。本実施形態では、モータユニット19の動力は、レバー、リンク等により構成された動力伝達機構20を経由して、ワイパアーム14,16に個別に伝達される。 FIG. 1 is a diagram showing an example of a schematic configuration showing awindshield 11 of a vehicle 10 equipped with a wiper device 12 provided with a motor control device according to the present embodiment.
As shown in FIG. 1, thevehicle 10 includes a windshield 11 and a wiper device 12.
Thewiper device 12 wipes the windshield 11.
Thewiper device 12 includes wiper arms 14, 16, wiper blades 17, 18, a motor unit 19, and a power transmission mechanism 20.
Thewiper arm 14 swings around the pivot shaft 13. The wiper arm 16 swings around the pivot shaft 15.
Thewiper blade 17 is attached to the free end of the wiper arm 14. The wiper blade 18 is attached to the free end of the wiper arm 16.
Themotor unit 19 drives the wiper arms 14 and 16. In the present embodiment, the power of the motor unit 19 is individually transmitted to the wiper arms 14 and 16 via the power transmission mechanism 20 composed of levers, links and the like.
図1に示すように、車両10は、フロントガラス11及びワイパ装置12を備える。
ワイパ装置12は、フロントガラス11を払拭する。
ワイパ装置12は、ワイパアーム14,16、ワイパブレード17,18、モータユニット19及び動力伝達機構20を備える。
ワイパアーム14は、ピボット軸13を中心として揺動する。ワイパアーム16は、ピボット軸15を中心として揺動する。
ワイパブレード17は、ワイパアーム14の自由端に取り付けられている。ワイパブレード18は、ワイパアーム16の自由端に取り付けられている。
モータユニット19は、ワイパアーム14,16を駆動する。本実施形態では、モータユニット19の動力は、レバー、リンク等により構成された動力伝達機構20を経由して、ワイパアーム14,16に個別に伝達される。 FIG. 1 is a diagram showing an example of a schematic configuration showing a
As shown in FIG. 1, the
The
The
The
The
The
図2は、本実施形態におけるモータユニット19の外観の一例を示す図である。図3は、図2に示すモータユニット19のアンダーカバー28が取り外された状態の底面図である。
図2に示すように、モータユニット19の外観は、主としてケース23及びフレーム24によって構成される。
ケース23は、有底円筒形状を備えている。フレーム24は、中空の形状を備えている。フレーム24とケース23とは、図示しない締結部材により固定されている。 FIG. 2 is a diagram showing an example of the appearance of themotor unit 19 in the present embodiment. FIG. 3 is a bottom view of the motor unit 19 shown in FIG. 2 with the undercover 28 removed.
As shown in FIG. 2, the appearance of themotor unit 19 is mainly composed of the case 23 and the frame 24.
Thecase 23 has a bottomed cylindrical shape. The frame 24 has a hollow shape. The frame 24 and the case 23 are fixed by a fastening member (not shown).
図2に示すように、モータユニット19の外観は、主としてケース23及びフレーム24によって構成される。
ケース23は、有底円筒形状を備えている。フレーム24は、中空の形状を備えている。フレーム24とケース23とは、図示しない締結部材により固定されている。 FIG. 2 is a diagram showing an example of the appearance of the
As shown in FIG. 2, the appearance of the
The
図3に示すように、モータユニット19は、ブラシレスモータ30、ロータ軸22a、開口部24a、ウォームホイール25、出力軸26、減速機構27、アンダーカバー28、制御基板29、センサマグネット38及びモータ制御装置33を備える。
As shown in FIG. 3, the motor unit 19 includes a brushless motor 30, a rotor shaft 22a, an opening 24a, a worm wheel 25, an output shaft 26, a reduction mechanism 27, an undercover 28, a control board 29, a sensor magnet 38, and a motor control. The device 33 is provided.
ブラシレスモータ30は、モータ制御装置33の制御指示に基づいてワイパアーム14,16を揺動動作させる。
例えば、ブラシレスモータ30は、3相4極形であるブラシレスモータである。
ブラシレスモータ30は、ステータ21及びロータ(回転子)22を備える。
ステータ21は、ケース23の内周に固定されている。ステータ21は、3相の電機子コイル21u,21v,21wを備える。ステータ21は、その電機子コイル21u,21v,21wが巻装されている。例えば、3相の電機子コイル21u,21v,21wは、一端の中性点で接続されるデルタ結線により接続される。ただし、デルタ結線に限らず、Y結線であってもよい。また、ブラシレスモータ30は、各電機子コイル21u,21v,21wが、正極及び負極の両方として機能するモータである。 Thebrushless motor 30 swings the wiper arms 14 and 16 based on the control instruction of the motor control device 33.
For example, thebrushless motor 30 is a three-phase four-pole brushless motor.
Thebrushless motor 30 includes a stator 21 and a rotor (rotor) 22.
Thestator 21 is fixed to the inner circumference of the case 23. The stator 21 includes three- phase armature coils 21u, 21v, 21w. The stator 21 is wound with armature coils 21u, 21v, 21w. For example, the three- phase armature coils 21u, 21v, 21w are connected by a delta connection connected at the neutral point at one end. However, the connection is not limited to the delta connection and may be a Y connection. Further, the brushless motor 30 is a motor in which each armature coil 21u, 21v, 21w functions as both a positive electrode and a negative electrode.
例えば、ブラシレスモータ30は、3相4極形であるブラシレスモータである。
ブラシレスモータ30は、ステータ21及びロータ(回転子)22を備える。
ステータ21は、ケース23の内周に固定されている。ステータ21は、3相の電機子コイル21u,21v,21wを備える。ステータ21は、その電機子コイル21u,21v,21wが巻装されている。例えば、3相の電機子コイル21u,21v,21wは、一端の中性点で接続されるデルタ結線により接続される。ただし、デルタ結線に限らず、Y結線であってもよい。また、ブラシレスモータ30は、各電機子コイル21u,21v,21wが、正極及び負極の両方として機能するモータである。 The
For example, the
The
The
例えば、ロータ22は、ステータ21の内側に設けられている。ロータ22は、ロータ軸22aと、ロータ軸22aに取り付けた4極の永久磁石22bとを備える。ケース23内には複数の軸受(不図示)が設けられており、ロータ軸22aは、複数の軸受により回転可能に支持されている。
なお、図3に示すようにロータ22は、ステータ21の内側に配置されたインナロータ形の構造であるが、ロータ22がステータ21の外側に配置されたアウターロータ形の構造であってもよい。 For example, therotor 22 is provided inside the stator 21. The rotor 22 includes a rotor shaft 22a and a four-pole permanent magnet 22b attached to the rotor shaft 22a. A plurality of bearings (not shown) are provided in the case 23, and the rotor shaft 22a is rotatably supported by the plurality of bearings.
As shown in FIG. 3, therotor 22 has an inner rotor type structure arranged inside the stator 21, but may have an outer rotor type structure in which the rotor 22 is arranged outside the stator 21.
なお、図3に示すようにロータ22は、ステータ21の内側に配置されたインナロータ形の構造であるが、ロータ22がステータ21の外側に配置されたアウターロータ形の構造であってもよい。 For example, the
As shown in FIG. 3, the
ロータ軸22aは、長さ方向の略半分がケース23の内部に配置されており、残りの略半分がフレーム24内に配置されている。
ロータ軸22aのうちフレーム24内に配置された部分の外周には、減速機構27が形成されている。減速機構27は、ウォーム22c及びギヤ25aを備える。
ウォーム22cは、フレーム24内に配置されたロータ軸22aの外周に設けられている。ギヤ25aは、フレーム24内に設けられたウォームホイール25の外周に形成されている。ギヤ25aは、ウォーム22cと噛合されている。 About half of therotor shaft 22a in the length direction is arranged inside the case 23, and the other about half is arranged inside the frame 24.
Areduction mechanism 27 is formed on the outer periphery of a portion of the rotor shaft 22a arranged in the frame 24. The speed reduction mechanism 27 includes a worm 22c and a gear 25a.
Theworm 22c is provided on the outer circumference of the rotor shaft 22a arranged in the frame 24. The gear 25a is formed on the outer periphery of the worm wheel 25 provided in the frame 24. The gear 25a is meshed with the worm 22c.
ロータ軸22aのうちフレーム24内に配置された部分の外周には、減速機構27が形成されている。減速機構27は、ウォーム22c及びギヤ25aを備える。
ウォーム22cは、フレーム24内に配置されたロータ軸22aの外周に設けられている。ギヤ25aは、フレーム24内に設けられたウォームホイール25の外周に形成されている。ギヤ25aは、ウォーム22cと噛合されている。 About half of the
A
The
ウォームホイール25は、出力軸26と一体回転するように構成されている。減速機構27は、ロータ22の動力を出力軸26に伝達する際に、ロータ22の回転数(入力回転数)よりも出力軸26の回転数(出力回転数)を低くする。また、図2において、フレーム24の上部には、図示しない軸孔が設けられている。出力軸26におけるウォームホイール25が固定された端部に対して反対側の端部は、フレーム24の軸孔を経由して外部に露出している。出力軸26におけるフレーム24の外部に露出した部分には、図1に示すように動力伝達機構20が連結されている。
The worm wheel 25 is configured to rotate integrally with the output shaft 26. When transmitting the power of the rotor 22 to the output shaft 26, the speed reduction mechanism 27 lowers the rotation speed (output rotation speed) of the output shaft 26 to the rotation speed (input rotation speed) of the rotor 22. Further, in FIG. 2, a shaft hole (not shown) is provided in the upper portion of the frame 24. The end of the output shaft 26 opposite to the fixed end of the worm wheel 25 is exposed to the outside through the shaft hole of the frame 24. As shown in FIG. 1, a power transmission mechanism 20 is connected to a portion of the output shaft 26 exposed to the outside of the frame 24.
開口部24aは、フレーム24における軸孔の反対側の部分に設けられている。開口部24aは、フレーム24の内部にウォームホイール25等を取り付けるために形成されたものである。アンダーカバー28は、開口部24aを塞ぐように設けられている。アンダーカバー28はトレイ形状を備えている。
制御基板29は、アンダーカバー28とフレーム24とにより取り囲まれた空間に設けられている。図2に示すように、例えば、制御基板29はアンダーカバー28に取り付けられる。この制御基板29には、ブラシレスモータ30を制御するモータ制御装置33が設けられている。 Theopening 24a is provided in a portion of the frame 24 opposite to the shaft hole. The opening 24a is formed to attach the worm wheel 25 or the like inside the frame 24. The undercover 28 is provided so as to close the opening 24a. The undercover 28 has a tray shape.
Thecontrol board 29 is provided in a space surrounded by the undercover 28 and the frame 24. As shown in FIG. 2, for example, the control board 29 is attached to the undercover 28. The control board 29 is provided with a motor control device 33 that controls the brushless motor 30.
制御基板29は、アンダーカバー28とフレーム24とにより取り囲まれた空間に設けられている。図2に示すように、例えば、制御基板29はアンダーカバー28に取り付けられる。この制御基板29には、ブラシレスモータ30を制御するモータ制御装置33が設けられている。 The
The
センサマグネット38は、ロータ軸22aのうちフレーム24内に配置された箇所に設けられている。センサマグネット38は、ロータ軸22aと一体回転する。センサマグネット38は、ロータ軸22aの円周方向に沿って、N極とS極とが交互に並ぶように着磁されている。
The sensor magnet 38 is provided at a position of the rotor shaft 22a arranged in the frame 24. The sensor magnet 38 rotates integrally with the rotor shaft 22a. The sensor magnet 38 is magnetized so that the north and south poles are alternately arranged along the circumferential direction of the rotor shaft 22a.
以下に、本実施形態におけるモータ制御装置33について、図面を用いて説明する。
図4は、本実施形態におけるワイパ装置12の制御系の概略構成の一例を示す図である。ワイパ装置12は、ワイパスイッチ37、回転角検出部39、車速センサ40及びモータ制御装置33を備える。 Themotor control device 33 according to the present embodiment will be described below with reference to the drawings.
FIG. 4 is a diagram showing an example of a schematic configuration of the control system of thewiper device 12 in the present embodiment. The wiper device 12 includes a wiper switch 37, a rotation angle detection unit 39, a vehicle speed sensor 40, and a motor control device 33.
図4は、本実施形態におけるワイパ装置12の制御系の概略構成の一例を示す図である。ワイパ装置12は、ワイパスイッチ37、回転角検出部39、車速センサ40及びモータ制御装置33を備える。 The
FIG. 4 is a diagram showing an example of a schematic configuration of the control system of the
ワイパスイッチ37は、車両10の車室内に備えられている。
ワイパスイッチ37は、ワイパアーム14,16を揺動動作させるスイッチである。
ワイパスイッチ37は、ワイパアーム14,16を低速(例えば、予め設定された速度)で動作させる低速作動モード、ワイパアーム14,16を低速作動モードより高速で動作させる高速作動モード、及びワイパアーム14,16の揺動動作を停止させる停止モードの各モードに切り換え可能である。 Thewiper switch 37 is provided in the vehicle interior of the vehicle 10.
Thewiper switch 37 is a switch that swings the wiper arms 14 and 16.
Thewiper switch 37 has a low-speed operation mode in which the wiper arms 14 and 16 are operated at a low speed (for example, a preset speed), a high-speed operation mode in which the wiper arms 14 and 16 are operated at a higher speed than the low-speed operation mode, and the wiper arms 14 and 16. It is possible to switch to each mode of the stop mode for stopping the swing operation.
ワイパスイッチ37は、ワイパアーム14,16を揺動動作させるスイッチである。
ワイパスイッチ37は、ワイパアーム14,16を低速(例えば、予め設定された速度)で動作させる低速作動モード、ワイパアーム14,16を低速作動モードより高速で動作させる高速作動モード、及びワイパアーム14,16の揺動動作を停止させる停止モードの各モードに切り換え可能である。 The
The
The
ワイパスイッチ37は、運転者により操作されることで、その操作を示す操作信号をモータ制御装置33に出力する。例えば、運転者は、降雨量、降雪量等の条件に基づいて、ワイパスイッチ37を操作することでワイパアーム14,16の払拭速度を切り替えることができる。運転者は、降雨量、降雪量が少ないとき、ワイパスイッチ37を操作することでワイパアーム14,16を予め定められた低速で動作させる低速作動モードを選択することができる。この場合、ワイパスイッチ37は、運転者による、低速作動モードを選択する操作に基づいて、低速作動モードを示す低速作動モード信号を操作信号としてモータ制御装置33に出力する。
The wiper switch 37 is operated by the driver to output an operation signal indicating the operation to the motor control device 33. For example, the driver can switch the wiping speed of the wiper arms 14 and 16 by operating the wiper switch 37 based on conditions such as the amount of rainfall and the amount of snowfall. When the amount of rainfall and the amount of snowfall are small, the driver can select a low-speed operation mode in which the wiper arms 14 and 16 are operated at a predetermined low speed by operating the wiper switch 37. In this case, the wiper switch 37 outputs a low-speed operation mode signal indicating the low-speed operation mode to the motor control device 33 as an operation signal based on the operation of selecting the low-speed operation mode by the driver.
一方、運転者は、降雨量、降雪量が多いとき、ワイパスイッチ37を操作して、ワイパアーム14,16を、上記の低速よりも高速で動作させる高速作動モードを選択することができる。この場合、ワイパスイッチ37は、運転者による、高速作動モードを選択する操作に基づいて、高速作動モードを示す高速作動モード信号を操作信号としてモータ制御装置33に出力する。
On the other hand, the driver can select a high-speed operation mode in which the wiper switches 37 are operated to operate the wiper arms 14 and 16 at a speed higher than the above-mentioned low speed when the amount of rainfall or snowfall is large. In this case, the wiper switch 37 outputs the high-speed operation mode signal indicating the high-speed operation mode to the motor control device 33 as an operation signal based on the operation of selecting the high-speed operation mode by the driver.
また、運転者によりワイパスイッチ37に対してワイパアーム14,16の揺動動作を停止させる操作が行われた場合に、ワイパスイッチ37は、停止モードを示す停止モード信号を操作信号としてモータ制御装置33に出力する。
Further, when the driver performs an operation to stop the swinging operation of the wiper arms 14 and 16 with respect to the wiper switch 37, the wiper switch 37 uses the stop mode signal indicating the stop mode as an operation signal to the motor control device 33. Output to.
車速センサ40は、車両10に設けられている。車速センサ40は、車両10の走行速度(以下、「車速」という。)Vを計測する。車速センサ40は、計測した車両10の車速Vをモータ制御装置33に出力する。
The vehicle speed sensor 40 is provided in the vehicle 10. The vehicle speed sensor 40 measures the traveling speed (hereinafter, referred to as “vehicle speed”) V of the vehicle 10. The vehicle speed sensor 40 outputs the measured vehicle speed V of the vehicle 10 to the motor control device 33.
回転角検出部39は、ロータ22の回転に応じた信号を検出する。例えば、回転角検出部39は、3つのホールICを備え、ロータ軸22aを中心として磁気的に互いに120度となる位置に設けられている。これらの3つのホールICは、ロータ22が回転すると、それぞれ互いに120度位相のずれたパルス信号をモータ制御装置33に対して出力する。すなわち、回転角検出部39は、ロータ22の回転に伴い、センサマグネット38の磁極の変化に基づいたパルス信号を発生し、モータ制御装置33に出力する。
The rotation angle detection unit 39 detects a signal corresponding to the rotation of the rotor 22. For example, the rotation angle detection unit 39 is provided with three Hall ICs and is provided at positions magnetically 120 degrees from each other with respect to the rotor shaft 22a. When the rotor 22 rotates, these three Hall ICs output pulse signals that are 120 degrees out of phase with each other to the motor control device 33. That is, the rotation angle detection unit 39 generates a pulse signal based on the change in the magnetic poles of the sensor magnet 38 as the rotor 22 rotates, and outputs the pulse signal to the motor control device 33.
モータ制御装置33は、インバータ52及び制御部54を備える。
インバータ52は、3相ブリッジ接続された6個のスイッチング素子52a~52fと、各スイッチング素子52a~52fのそれぞれのコレクタ-エミッタ間に逆並列に接続されたダイオード53a~53fとを備える。各スイッチング素子52a~52fは、例えば、FET(Field Effect Transistor;電界効果トランジスタ)、又はIGBT(Insulated Gate Bipolar Transistor;絶縁ゲートバイポーラトランジスタ)である。ブリッジ接続された6個のスイッチング素子52a~52fの各ゲートは制御部54に接続される。 Themotor control device 33 includes an inverter 52 and a control unit 54.
Theinverter 52 includes six switching elements 52a to 52f connected by a three-phase bridge, and diodes 53a to 53f connected in antiparallel between the collectors and emitters of the switching elements 52a to 52f. Each of the switching elements 52a to 52f is, for example, a FET (Field Effect Transistor) or an IGBT (Insulated Gate Bipolar Transistor). Each gate of the six bridge-connected switching elements 52a to 52f is connected to the control unit 54.
インバータ52は、3相ブリッジ接続された6個のスイッチング素子52a~52fと、各スイッチング素子52a~52fのそれぞれのコレクタ-エミッタ間に逆並列に接続されたダイオード53a~53fとを備える。各スイッチング素子52a~52fは、例えば、FET(Field Effect Transistor;電界効果トランジスタ)、又はIGBT(Insulated Gate Bipolar Transistor;絶縁ゲートバイポーラトランジスタ)である。ブリッジ接続された6個のスイッチング素子52a~52fの各ゲートは制御部54に接続される。 The
The
スイッチング素子52a~52fのドレインまたはソース(コレクタまたはエミッタ)は、デルタ結線された電機子コイル21u,21v,21wに接続される。
より具体的に、スイッチング素子52aのソースとスイッチング素子52dのドレインとの接続点である中性点55aは、電機子コイル21wと電機子コイル21uの接続点21aに接続される。スイッチング素子52bのソースとスイッチング素子52eのドレインとの接続点である中性点55bは、電機子コイル21wと電機子コイル21vの接続点21bに接続される。スイッチング素子52cのソースとスイッチング素子52fのドレインとの接続点である中性点55cは、電機子コイル21vと電機子コイル21uの接続点21cに接続される。
これにより、6個のスイッチング素子52a~52fは、制御部54から出力される駆動信号(ゲート信号)に基づいてスイッチング動作を行い、インバータ52に印加される直流電源51の電源電圧を、3相(U相、V相、W相)の交流電圧として、電機子コイル21u,21v,21wに通電信号として供給する。 The drain or source (collector or emitter) of theswitching elements 52a to 52f is connected to the delta-connected armature coils 21u, 21v, 21w.
More specifically, theneutral point 55a, which is the connection point between the source of the switching element 52a and the drain of the switching element 52d, is connected to the connection point 21a of the armature coil 21w and the armature coil 21u. The neutral point 55b, which is the connection point between the source of the switching element 52b and the drain of the switching element 52e, is connected to the connection point 21b of the armature coil 21w and the armature coil 21v. The neutral point 55c, which is the connection point between the source of the switching element 52c and the drain of the switching element 52f, is connected to the connection point 21c of the armature coil 21v and the armature coil 21u.
As a result, the sixswitching elements 52a to 52f perform a switching operation based on the drive signal (gate signal) output from the control unit 54, and the power supply voltage of the DC power supply 51 applied to the inverter 52 is set to three phases. As an AC voltage of (U phase, V phase, W phase), it is supplied as an energization signal to the armature coils 21u, 21v, 21w.
より具体的に、スイッチング素子52aのソースとスイッチング素子52dのドレインとの接続点である中性点55aは、電機子コイル21wと電機子コイル21uの接続点21aに接続される。スイッチング素子52bのソースとスイッチング素子52eのドレインとの接続点である中性点55bは、電機子コイル21wと電機子コイル21vの接続点21bに接続される。スイッチング素子52cのソースとスイッチング素子52fのドレインとの接続点である中性点55cは、電機子コイル21vと電機子コイル21uの接続点21cに接続される。
これにより、6個のスイッチング素子52a~52fは、制御部54から出力される駆動信号(ゲート信号)に基づいてスイッチング動作を行い、インバータ52に印加される直流電源51の電源電圧を、3相(U相、V相、W相)の交流電圧として、電機子コイル21u,21v,21wに通電信号として供給する。 The drain or source (collector or emitter) of the
More specifically, the
As a result, the six
制御部54は、回転角検出部39から供給されるパルス信号に基づいて、ロータ22の回転位置を決定する。また、制御部54は、パルス信号に基づいて、ロータ22の回転数を検出する。そして、制御部54は、ブラシレスモータ30の出力が低い低出力モードにおいて、ブラシレスモータ30を正弦波駆動する。
すなわち、制御部54は、第1駆動信号をインバータ52に出力することで、電機子コイル21u,21v,21wを、正弦波に高調波を重畳させた正弦波(第1通電信号)により通電し、ロータ22を回転駆動する。ここで、本実施形態においては、第1駆動信号は、第1通電信号に対応する。すなわち、制御部54は、第1駆動信号を、インバータ52を制御する指示信号として出力する。そして、インバータ52は、当該指示信号に基づいて、第1通電信号により3相各相を正弦波駆動する(詳細については、図6を用いて後述する)。 Thecontrol unit 54 determines the rotation position of the rotor 22 based on the pulse signal supplied from the rotation angle detection unit 39. Further, the control unit 54 detects the rotation speed of the rotor 22 based on the pulse signal. Then, the control unit 54 drives the brushless motor 30 in a sine wave in a low output mode in which the output of the brushless motor 30 is low.
That is, by outputting the first drive signal to theinverter 52, the control unit 54 energizes the armature coils 21u, 21v, 21w by the sine wave (first energization signal) in which harmonics are superimposed on the sine wave. , The rotor 22 is rotationally driven. Here, in the present embodiment, the first drive signal corresponds to the first energization signal. That is, the control unit 54 outputs the first drive signal as an instruction signal for controlling the inverter 52. Then, the inverter 52 drives each of the three phases in a sine wave by the first energization signal based on the instruction signal (details will be described later with reference to FIG. 6).
すなわち、制御部54は、第1駆動信号をインバータ52に出力することで、電機子コイル21u,21v,21wを、正弦波に高調波を重畳させた正弦波(第1通電信号)により通電し、ロータ22を回転駆動する。ここで、本実施形態においては、第1駆動信号は、第1通電信号に対応する。すなわち、制御部54は、第1駆動信号を、インバータ52を制御する指示信号として出力する。そして、インバータ52は、当該指示信号に基づいて、第1通電信号により3相各相を正弦波駆動する(詳細については、図6を用いて後述する)。 The
That is, by outputting the first drive signal to the
一方、制御部54は、低出力モードよりも出力が高い高出力モードにおいて、第2駆動信号をインバータ52に出力することで、電機子コイル21u,21v,21wを、第1通電信号を広角台形波にした正弦波(第2通電信号)により通電し、ロータ22を回転駆動する。ここで、本実施形態においては、第2駆動信号は、第2通電信号に対応する。すなわち、制御部54は、第2駆動信号を、インバータ52を制御する指示信号として出力する。そして、インバータ52は、当該指示信号に基づいて、第2通電信号により3相各相を正弦波駆動する(詳細については、図7を用いて後述する)。
On the other hand, the control unit 54 outputs the second drive signal to the inverter 52 in the high output mode in which the output is higher than the low output mode, so that the armature coils 21u, 21v, 21w and the first energization signal are wide-angle trapezoidal. The rotor 22 is rotationally driven by energizing with a waved sine wave (second energization signal). Here, in the present embodiment, the second drive signal corresponds to the second energization signal. That is, the control unit 54 outputs the second drive signal as an instruction signal for controlling the inverter 52. Then, the inverter 52 drives each of the three phases in a sine wave by the second energization signal based on the instruction signal (details will be described later with reference to FIG. 7).
以下に、本実施形態における制御部54について、図5を用いて説明する。
図5は、本実施形態における制御部54の概略構成の一例を示す図である。
制御部54は、位置検出部61、負荷判定部62、モード判定部63及び駆動制御部64を備える。 Thecontrol unit 54 in the present embodiment will be described below with reference to FIG.
FIG. 5 is a diagram showing an example of a schematic configuration of thecontrol unit 54 in the present embodiment.
Thecontrol unit 54 includes a position detection unit 61, a load determination unit 62, a mode determination unit 63, and a drive control unit 64.
図5は、本実施形態における制御部54の概略構成の一例を示す図である。
制御部54は、位置検出部61、負荷判定部62、モード判定部63及び駆動制御部64を備える。 The
FIG. 5 is a diagram showing an example of a schematic configuration of the
The
位置検出部61は、回転角検出部39から供給されるパルス信号に基づいて、ロータ22の回転位置を検出する。位置検出部61は、検出したロータ22の回転位置を駆動制御部64に出力する。
The position detection unit 61 detects the rotation position of the rotor 22 based on the pulse signal supplied from the rotation angle detection unit 39. The position detection unit 61 outputs the detected rotation position of the rotor 22 to the drive control unit 64.
負荷判定部62は、車速センサ40が計測した車速Vが予め設定された所定値Vthを超えたか否かを判定する。負荷判定部62は、車速センサ40が計測した車速Vが所定値Vthを超えた場合に、ブラシレスモータ30の負荷が高負荷であると判定する。負荷判定部62は、ブラシレスモータ30の負荷が高負荷であると判定した場合に、その判定結果を示す高負荷信号をモード判定部63に出力する。これは、車両10の車速Vが上がると、車両10のフロントガラス11への風量が増大し、フロントガラス11上を払拭するワイパブレード17,18の動きが妨げられるためである。この場合には、ブラシレスモータ30は高出力でワイパアーム14,16を揺動動作させる必要がある。したがって、制御部54は、車速Vが所定値Vthを超えた場合、低出力モードから高出力モードに移行することで、ブラシレスモータ30に対して大きなトルクを発生させるとともに、位置検出部61が検出したロータ22の回転位置を基準として所定の電気角で進角制御を行うことでブラシレスモータ30の回転数を上昇させる。
The load determination unit 62 determines whether or not the vehicle speed V measured by the vehicle speed sensor 40 exceeds a preset predetermined value Vth. The load determination unit 62 determines that the load of the brushless motor 30 is a high load when the vehicle speed V measured by the vehicle speed sensor 40 exceeds a predetermined value Vth. When the load determination unit 62 determines that the load of the brushless motor 30 is a high load, the load determination unit 62 outputs a high load signal indicating the determination result to the mode determination unit 63. This is because when the vehicle speed V of the vehicle 10 increases, the air volume of the vehicle 10 to the windshield 11 increases, and the movement of the wiper blades 17 and 18 that wipe the windshield 11 is hindered. In this case, the brushless motor 30 needs to swing the wiper arms 14 and 16 at high output. Therefore, when the vehicle speed V exceeds the predetermined value Vth, the control unit 54 shifts from the low output mode to the high output mode to generate a large torque for the brushless motor 30, and the position detection unit 61 detects it. The rotation speed of the brushless motor 30 is increased by controlling the advance angle at a predetermined electric angle with reference to the rotation position of the rotor 22.
また、負荷判定部62は、回転角検出部39から供給されるパルス信号に基づいて検出されるロータ22の回転数またはブラシレスモータ30の電流値の所定値、もしくはその両方から算出される所定値が、予め設定された所定値を超えたか否かを判定する。負荷判定部62は、回転角検出部39から供給されるパルス信号に基づいて検出されるロータ22の回転数またはブラシレスモータ30の電流値の所定値、もしくはその両方から算出される所定値が、予め設定された所定値を超えた場合に、ブラシレスモータ30の負荷が高負荷であると判定する。負荷判定部62は、ブラシレスモータ30の負荷が高負荷であると判定した場合に、その判定結果を示す高負荷信号をモード判定部63に出力する。これは、雨量の変化などの状況変化が起こり、車両10のフロントガラス11(払拭面)上におけるワイパブレード17,18の動きへの抵抗が増加し、ワイパブレード17、18の動きが妨げられるためである。この場合には、ブラシレスモータ30は高出力でワイパアーム14,16を揺動動作させる必要がある。したがって、制御部54は、ロータ22の回転数またはブラシレスモータ30の電流値の所定値、もしくはその両方から算出される所定値が、予め設定された所定値を超えた場合、低出力モードから高出力モードに移行することで、ブラシレスモータ30に対して大きなトルクを発生させるとともに、位置検出部61が検出したロータ22の回転位置を基準として所定の電気角で進角制御を行うことでブラシレスモータ30の回転数を上昇させる。
Further, the load determination unit 62 is a predetermined value calculated from a predetermined value of the rotation speed of the rotor 22 and the current value of the brushless motor 30 detected based on the pulse signal supplied from the rotation angle detection unit 39, or both. Determines whether or not exceeds a preset predetermined value. The load determination unit 62 has a predetermined value calculated from the rotation speed of the rotor 22 and / or the current value of the brushless motor 30 detected based on the pulse signal supplied from the rotation angle detection unit 39. When the preset value exceeds a preset value, it is determined that the load of the brushless motor 30 is high. When the load determination unit 62 determines that the load of the brushless motor 30 is a high load, the load determination unit 62 outputs a high load signal indicating the determination result to the mode determination unit 63. This is because changes in conditions such as changes in rainfall occur, resistance to movement of the wiper blades 17 and 18 on the windshield 11 (wiping surface) of the vehicle 10 increases, and movement of the wiper blades 17 and 18 is hindered. Is. In this case, the brushless motor 30 needs to swing the wiper arms 14 and 16 at high output. Therefore, when the predetermined value calculated from the predetermined value of the rotation speed of the rotor 22 and / or the current value of the brushless motor 30 exceeds the preset predetermined value, the control unit 54 increases from the low output mode to the high value. By shifting to the output mode, a large torque is generated for the brushless motor 30, and the brushless motor is controlled at a predetermined electric angle based on the rotation position of the rotor 22 detected by the position detection unit 61. Increase the number of revolutions of 30.
モード判定部63は、ブラシレスモータ30を低出力モードで駆動するか、高出力モードで駆動するか、又はブラシレスモータ30の駆動を停止するかのいずれかであるかを判定する。
モード判定部63は、ワイパスイッチ37から低速作動モード信号を取得した場合に、ブラシレスモータ30を低出力モードで駆動すると判定し、低出力モードを示す低出力モード信号を駆動制御部64に出力する。
モード判定部63は、ワイパスイッチ37から高速作動モード信号を取得した場合に、ブラシレスモータ30を高出力モードで駆動すると判定し、高出力モードを示す高出力モード信号を駆動制御部64に出力する。また、モード判定部63は、負荷判定部62から高負荷信号を取得した場合に、ブラシレスモータ30を高出力モードで駆動すると判定し、高出力モードを示す高出力モード信号を駆動制御部64に出力する。 Themode determination unit 63 determines whether the brushless motor 30 is driven in the low output mode, the high output mode, or the brushless motor 30 is stopped.
When themode determination unit 63 acquires the low-speed operation mode signal from the wiper switch 37, it determines that the brushless motor 30 is driven in the low output mode, and outputs a low output mode signal indicating the low output mode to the drive control unit 64. ..
When the high-speed operation mode signal is acquired from thewiper switch 37, the mode determination unit 63 determines that the brushless motor 30 is driven in the high output mode, and outputs a high output mode signal indicating the high output mode to the drive control unit 64. .. Further, the mode determination unit 63 determines that the brushless motor 30 is driven in the high output mode when the high load signal is acquired from the load determination unit 62, and transmits the high output mode signal indicating the high output mode to the drive control unit 64. Output.
モード判定部63は、ワイパスイッチ37から低速作動モード信号を取得した場合に、ブラシレスモータ30を低出力モードで駆動すると判定し、低出力モードを示す低出力モード信号を駆動制御部64に出力する。
モード判定部63は、ワイパスイッチ37から高速作動モード信号を取得した場合に、ブラシレスモータ30を高出力モードで駆動すると判定し、高出力モードを示す高出力モード信号を駆動制御部64に出力する。また、モード判定部63は、負荷判定部62から高負荷信号を取得した場合に、ブラシレスモータ30を高出力モードで駆動すると判定し、高出力モードを示す高出力モード信号を駆動制御部64に出力する。 The
When the
When the high-speed operation mode signal is acquired from the
モード判定部63は、ワイパスイッチ37から停止モード信号を取得した場合に、ブラシレスモータ30の駆動を停止させる判定をし、ブラシレスモータ30の駆動の停止を示す停止信号を駆動制御部64に出力する。
When the mode determination unit 63 acquires the stop mode signal from the wiper switch 37, the mode determination unit 63 determines to stop the drive of the brushless motor 30, and outputs a stop signal indicating the stop of the drive of the brushless motor 30 to the drive control unit 64. ..
駆動制御部64は、第1駆動制御部641及び第2駆動制御部642を備える。
駆動制御部64は、モード判定部63から低出力モード信号を取得した場合には、第1駆動制御部641によるブラシレスモータ30の3次高調波通電駆動を実行する。
図6は、本実施形態における第1駆動制御部641によるU、V、W各相の通電タイミングを示すタイミングチャートである。
図6の横軸に示す0°~360°の角度は、第1通電信号の1周期内における通電期間を表す電気角である。また、縦軸に示すFET_DUTY[%]は、各相へ印加する印加電圧のデューティを表す。
ここで、図6に示すように、第1通電信号は、正弦波に3次高調波が重畳された3相の各相の印加電圧を表している。
すなわち、インバータ52は、第1の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで、正弦波に3次高調波が重畳された3相の各相の通電タイミングを表す第1通電信号を出力し、ブラシレスモータの3相の各相を正弦波駆動する。
以下の説明において、第1通電信号により、ブラシレスモータ30に通電する駆動制御を3次高調波通電駆動と称する場合がある。
このように、第1駆動制御部641は、位置検出部61により検出されたロータ22の回転位置に応じた通電タイミングで第1駆動信号をインバータ52に出力することで、インバータ52に対して、ブラシレスモータ30を3次高調波通電駆動するための第1通電信号を発生させる。
図6に示すように、第1通電信号は正弦波に3次高調波が重畳された波形(以下、3次高調波重畳波と言う)を有する。3次高調波重畳波は、その波形の山における印加電圧のデューティ(ピーク電圧)が一定区間約100%(97~99%)となり、谷における印加電圧のデューティが一定区間約0%(1~3%)となる。さらに、第1通電信号において、W相の印加電圧のデューティのみが約100%(97~99%)である通常通電区間と、U相の印加電圧のデューティのみが約100%である通常通電区間との間の区間は、U相、V相およびW相の印加電圧がピーク電圧(97~99%)未満である。なお、図示を省略したが、第1通電信号の1周期内における通電期間において、V相の印加電圧のデューティのみが約100%(97~99%)である通常通電区間も存在する。 Thedrive control unit 64 includes a first drive control unit 641 and a second drive control unit 642.
When thedrive control unit 64 acquires the low output mode signal from the mode determination unit 63, the drive control unit 64 executes the third harmonic energization drive of the brushless motor 30 by the first drive control unit 641.
FIG. 6 is a timing chart showing the energization timings of the U, V, and W phases by the firstdrive control unit 641 in the present embodiment.
The angle from 0 ° to 360 ° shown on the horizontal axis of FIG. 6 is an electric angle representing an energization period within one cycle of the first energization signal. Further, FET_DUTY [%] shown on the vertical axis represents the duty of the applied voltage applied to each phase.
Here, as shown in FIG. 6, the first energization signal represents the applied voltage of each of the three phases in which the third harmonic is superimposed on the sine wave.
That is, in the first control mode, theinverter 52 is the first energization timing indicating the energization timing of each of the three phases in which the third harmonic is superimposed on the sine wave at the energization timing according to the rotation position of the rotor. It outputs a signal and drives each of the three phases of the brushless motor in a sine wave.
In the following description, the drive control for energizing thebrushless motor 30 by the first energization signal may be referred to as a third harmonic energization drive.
In this way, the firstdrive control unit 641 outputs the first drive signal to the inverter 52 at the energization timing corresponding to the rotation position of the rotor 22 detected by the position detection unit 61, so that the first drive control unit 641 can contact the inverter 52. A first energization signal for driving the brushless motor 30 by energizing the third harmonic is generated.
As shown in FIG. 6, the first energization signal has a waveform in which a third harmonic is superimposed on a sine wave (hereinafter, referred to as a third harmonic superimposed wave). In the third harmonic superimposed wave, the duty (peak voltage) of the applied voltage at the peak of the waveform is about 100% (97 to 99%) in a certain section, and the duty of the applied voltage at the valley is about 0% (1 to 1 to). 3%). Further, in the first energization signal, the normal energization section in which only the duty of the applied voltage of the W phase is about 100% (97 to 99%) and the normal energization section in which only the duty of the applied voltage of the U phase is about 100%. In the section between and, the applied voltage of the U phase, the V phase and the W phase is less than the peak voltage (97 to 99%). Although not shown, there is also a normal energization section in which only the duty of the applied voltage of the V phase is about 100% (97 to 99%) during the energization period within one cycle of the first energization signal.
駆動制御部64は、モード判定部63から低出力モード信号を取得した場合には、第1駆動制御部641によるブラシレスモータ30の3次高調波通電駆動を実行する。
図6は、本実施形態における第1駆動制御部641によるU、V、W各相の通電タイミングを示すタイミングチャートである。
図6の横軸に示す0°~360°の角度は、第1通電信号の1周期内における通電期間を表す電気角である。また、縦軸に示すFET_DUTY[%]は、各相へ印加する印加電圧のデューティを表す。
ここで、図6に示すように、第1通電信号は、正弦波に3次高調波が重畳された3相の各相の印加電圧を表している。
すなわち、インバータ52は、第1の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで、正弦波に3次高調波が重畳された3相の各相の通電タイミングを表す第1通電信号を出力し、ブラシレスモータの3相の各相を正弦波駆動する。
以下の説明において、第1通電信号により、ブラシレスモータ30に通電する駆動制御を3次高調波通電駆動と称する場合がある。
このように、第1駆動制御部641は、位置検出部61により検出されたロータ22の回転位置に応じた通電タイミングで第1駆動信号をインバータ52に出力することで、インバータ52に対して、ブラシレスモータ30を3次高調波通電駆動するための第1通電信号を発生させる。
図6に示すように、第1通電信号は正弦波に3次高調波が重畳された波形(以下、3次高調波重畳波と言う)を有する。3次高調波重畳波は、その波形の山における印加電圧のデューティ(ピーク電圧)が一定区間約100%(97~99%)となり、谷における印加電圧のデューティが一定区間約0%(1~3%)となる。さらに、第1通電信号において、W相の印加電圧のデューティのみが約100%(97~99%)である通常通電区間と、U相の印加電圧のデューティのみが約100%である通常通電区間との間の区間は、U相、V相およびW相の印加電圧がピーク電圧(97~99%)未満である。なお、図示を省略したが、第1通電信号の1周期内における通電期間において、V相の印加電圧のデューティのみが約100%(97~99%)である通常通電区間も存在する。 The
When the
FIG. 6 is a timing chart showing the energization timings of the U, V, and W phases by the first
The angle from 0 ° to 360 ° shown on the horizontal axis of FIG. 6 is an electric angle representing an energization period within one cycle of the first energization signal. Further, FET_DUTY [%] shown on the vertical axis represents the duty of the applied voltage applied to each phase.
Here, as shown in FIG. 6, the first energization signal represents the applied voltage of each of the three phases in which the third harmonic is superimposed on the sine wave.
That is, in the first control mode, the
In the following description, the drive control for energizing the
In this way, the first
As shown in FIG. 6, the first energization signal has a waveform in which a third harmonic is superimposed on a sine wave (hereinafter, referred to as a third harmonic superimposed wave). In the third harmonic superimposed wave, the duty (peak voltage) of the applied voltage at the peak of the waveform is about 100% (97 to 99%) in a certain section, and the duty of the applied voltage at the valley is about 0% (1 to 1 to). 3%). Further, in the first energization signal, the normal energization section in which only the duty of the applied voltage of the W phase is about 100% (97 to 99%) and the normal energization section in which only the duty of the applied voltage of the U phase is about 100%. In the section between and, the applied voltage of the U phase, the V phase and the W phase is less than the peak voltage (97 to 99%). Although not shown, there is also a normal energization section in which only the duty of the applied voltage of the V phase is about 100% (97 to 99%) during the energization period within one cycle of the first energization signal.
一方、駆動制御部64は、モード判定部63から高出力モード信号を取得した場合には、第2駆動制御部642によるブラシレスモータ30の広角台形波通電駆動を実行する。
図7Aから図7Dは、本実施形態における第2駆動制御部642によるU、V、W各相の通電タイミングを示すタイミングチャートである。
図7Aから図7Dの横軸に示す0°~360°の角度は、第2通電信号の1周期内における通電期間を表す電気角である。また、縦軸に示すFET_DUTY[%]は、各相へ印加する印加電圧のデューティを表す。
ここで、図7Aから図7Dに示すように、第2通電信号は、ロータ22(回転子)の回転位置に応じた通電タイミングで、3相のうち第1の相の印加電圧のデューティのみが100%となる通常通電区間と第2の相の印加電圧のデューティのみが100%となる通常通電区間との間に、第1の相及び第2の相の印加電圧のデューティが共に100%のデューティとなるオーバラップ通電区間を備えた信号である(図7Aから図7Dを用いて後述する)。
例えば、図6に示す第1通電信号において、W相の印加電圧のデューティが約100%である通常通電区間と、図6に示すU相の印加電圧のデューティが約100%である通常通電区間との間の区間は、図6においては、3相のうちいずれの相も印加電圧が約100%未満である。当該区間を、第2通電信号においては、W相とU相の両方の相の印加電圧も100%のデューティとなるオーバラップ通電区間(電圧値重複区間)と設定する。また、図7に示すように、他の相の間(U相とV相との間、V相とW相との間)もオーバラップ通電区間と設定する。これにより、第1通電信号から第2通電信号を生成することが可能である。また、第1通電信号に対応する第1駆動信号から、第2通電信号に対応する第2駆動信号を生成することも可能となる。
ここで、図7Aから図7Dを参照し、第2通電信号について説明する。この図7Aから図7Dについては、第2通電信号における時系列で連続する波形のうち、ある一区間を注目した場合の波形を示す。 On the other hand, when thedrive control unit 64 acquires the high output mode signal from the mode determination unit 63, the drive control unit 64 executes the wide-angle trapezoidal wave energization drive of the brushless motor 30 by the second drive control unit 642.
7A to 7D are timing charts showing the energization timings of the U, V, and W phases by the seconddrive control unit 642 in the present embodiment.
The angles from 0 ° to 360 ° shown on the horizontal axis of FIGS. 7A to 7D are electric angles representing the energization period within one cycle of the second energization signal. Further, FET_DUTY [%] shown on the vertical axis represents the duty of the applied voltage applied to each phase.
Here, as shown in FIGS. 7A to 7D, the second energization signal is the energization timing according to the rotation position of the rotor 22 (rotor), and only the duty of the applied voltage of the first phase out of the three phases is the duty. Between the normal energization section where the duty is 100% and the normal energization section where only the duty of the applied voltage of the second phase is 100%, the duty of the applied voltage of the first phase and the second phase is 100%. It is a signal including an overlap energization section which becomes a duty (described later with reference to FIGS. 7A to 7D).
For example, in the first energization signal shown in FIG. 6, the normal energization section in which the duty of the applied voltage of the W phase is about 100% and the normal energization section in which the duty of the applied voltage of the U phase shown in FIG. 6 is about 100%. In the section between and, in FIG. 6, the applied voltage of any of the three phases is less than about 100%. In the second energization signal, the section is set as an overlap energization section (voltage value overlapping section) in which the applied voltages of both the W phase and the U phase are also 100% duty. Further, as shown in FIG. 7, the overlap energization section is also set between the other phases (between the U phase and the V phase and between the V phase and the W phase). This makes it possible to generate a second energization signal from the first energization signal. It is also possible to generate a second drive signal corresponding to the second energization signal from the first drive signal corresponding to the first energization signal.
Here, the second energization signal will be described with reference to FIGS. 7A to 7D. 7A to 7D show waveforms when one section of the time-series continuous waveforms in the second energization signal is focused on.
図7Aから図7Dは、本実施形態における第2駆動制御部642によるU、V、W各相の通電タイミングを示すタイミングチャートである。
図7Aから図7Dの横軸に示す0°~360°の角度は、第2通電信号の1周期内における通電期間を表す電気角である。また、縦軸に示すFET_DUTY[%]は、各相へ印加する印加電圧のデューティを表す。
ここで、図7Aから図7Dに示すように、第2通電信号は、ロータ22(回転子)の回転位置に応じた通電タイミングで、3相のうち第1の相の印加電圧のデューティのみが100%となる通常通電区間と第2の相の印加電圧のデューティのみが100%となる通常通電区間との間に、第1の相及び第2の相の印加電圧のデューティが共に100%のデューティとなるオーバラップ通電区間を備えた信号である(図7Aから図7Dを用いて後述する)。
例えば、図6に示す第1通電信号において、W相の印加電圧のデューティが約100%である通常通電区間と、図6に示すU相の印加電圧のデューティが約100%である通常通電区間との間の区間は、図6においては、3相のうちいずれの相も印加電圧が約100%未満である。当該区間を、第2通電信号においては、W相とU相の両方の相の印加電圧も100%のデューティとなるオーバラップ通電区間(電圧値重複区間)と設定する。また、図7に示すように、他の相の間(U相とV相との間、V相とW相との間)もオーバラップ通電区間と設定する。これにより、第1通電信号から第2通電信号を生成することが可能である。また、第1通電信号に対応する第1駆動信号から、第2通電信号に対応する第2駆動信号を生成することも可能となる。
ここで、図7Aから図7Dを参照し、第2通電信号について説明する。この図7Aから図7Dについては、第2通電信号における時系列で連続する波形のうち、ある一区間を注目した場合の波形を示す。 On the other hand, when the
7A to 7D are timing charts showing the energization timings of the U, V, and W phases by the second
The angles from 0 ° to 360 ° shown on the horizontal axis of FIGS. 7A to 7D are electric angles representing the energization period within one cycle of the second energization signal. Further, FET_DUTY [%] shown on the vertical axis represents the duty of the applied voltage applied to each phase.
Here, as shown in FIGS. 7A to 7D, the second energization signal is the energization timing according to the rotation position of the rotor 22 (rotor), and only the duty of the applied voltage of the first phase out of the three phases is the duty. Between the normal energization section where the duty is 100% and the normal energization section where only the duty of the applied voltage of the second phase is 100%, the duty of the applied voltage of the first phase and the second phase is 100%. It is a signal including an overlap energization section which becomes a duty (described later with reference to FIGS. 7A to 7D).
For example, in the first energization signal shown in FIG. 6, the normal energization section in which the duty of the applied voltage of the W phase is about 100% and the normal energization section in which the duty of the applied voltage of the U phase shown in FIG. 6 is about 100%. In the section between and, in FIG. 6, the applied voltage of any of the three phases is less than about 100%. In the second energization signal, the section is set as an overlap energization section (voltage value overlapping section) in which the applied voltages of both the W phase and the U phase are also 100% duty. Further, as shown in FIG. 7, the overlap energization section is also set between the other phases (between the U phase and the V phase and between the V phase and the W phase). This makes it possible to generate a second energization signal from the first energization signal. It is also possible to generate a second drive signal corresponding to the second energization signal from the first drive signal corresponding to the first energization signal.
Here, the second energization signal will be described with reference to FIGS. 7A to 7D. 7A to 7D show waveforms when one section of the time-series continuous waveforms in the second energization signal is focused on.
図7Aに示すように、第2通電信号は、3相のうちのU相の印加電圧のデューティのみが100%となる通電区間(通常通電区間711)とV相の印加電圧のデューティのみが100%となる通電区間(通常通電区間712)との間に、U相および前記V相の印加電圧のデューティが共に100%のデューティとなる通電区間(オーバラップ通電区間713)を有する。
また、図7Bに示すように、第2通電信号は、3相のうちのV相の印加電圧のデューティのみが100%となる通電区間(通常通電区間731)とW相の印加電圧のデューティのみが100%となる通電区間(通常通電区間732)との間に、V相およびW相の印加電圧のデューティが共に100%となる通電区間(オーバラップ通電区間733)を有する。
また、図7Cに示すように、第2通電信号は、3相のうちのW相の印加電圧のデューティのみが100%となる通電区間(通常通電区間751)とU相の印加電圧のデューティのみが100%となる通電区間(通常通電区間752)との間に、W相およびV相の印加電圧のデューティが共に100%となる通電区間(オーバラップ通電区間753)を有する。
図7Aから図7Cでは、第2通電信号は、3相のうち第1の相の印加電圧のデューティのみが100%となる通常通電区間と第2の相の印加電圧のデューティのみが100%となる通常通電区間との間に、第1の相及び第2の相の印加電圧のデューティが共に100%のデューティとなるオーバラップ通電区間を備えた信号である点、説明した。これを言い換えると、第2通電信号は、3相のうち第1の相の印加電圧のデューティのみが0%となる通常通電区間と第2の相の印加電圧のデューティのみが0%となる通常通電区間との間に、第1の相及び第2の相の印加電圧のデューティが共に0%のデューティとなるオーバラップ通電区間を備えた信号であるともいえる。
具体的には、図7Dに示すように、第2通電信号は、3相のうちU相の印加電圧のデューティのみが0%となる通電区間(通常通電区間701)とV相の印加電圧のデューティのみが0%となる通電区間(通常通電区間702)との間に、U相およびV相の印加電圧のデューティが共に0%のデューティとなる通電区間(オーバラップ通電区間703)を有する。図示を省略するが、第2通電信号は、3相のうちV相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)とW相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)との間に、V相およびW相の印加電圧のデューティが共に0%のデューティとなる通電区間(オーバラップ通電区間)を有する。また、第2通電信号は、3相のうちW相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)とU相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)との間に、W相およびU相の印加電圧のデューティが共に0%のデューティとなる通電区間(オーバラップ通電区間)を有する。
以下の説明において、第2通電信号により、ブラシレスモータ30に通電する駆動制御を広角台形波通電駆動と称する場合がある。
このように、第2駆動制御部642は、位置検出部61により検出されたロータ22の回転位置に応じた通電タイミングで第2駆動信号をインバータ52に出力することで、インバータ52に対して、ブラシレスモータ30を広角台形波通電駆動するための第2通電信号を発生させる。 As shown in FIG. 7A, in the second energization signal, only the energization section (normal energization section 711) in which only the duty of the applied voltage of the U phase of the three phases is 100% and the duty of the applied voltage of the V phase are 100. There is an energization section (overlap energization section 713) in which the duty of the applied voltage of the U phase and the V phase is 100% of the duty of the energization section (normal energization section 712).
Further, as shown in FIG. 7B, the second energization signal includes only the energization section (normal energization section 731) in which only the duty of the applied voltage of the V phase of the three phases is 100% and the duty of the applied voltage of the W phase. There is an energized section (overlapping energized section 733) in which both the duty of the applied voltage of the V phase and the W phase is 100% with the energized section (normal energized section 732) in which is 100%.
Further, as shown in FIG. 7C, the second energization signal includes only the energization section (normal energization section 751) in which only the duty of the applied voltage of the W phase of the three phases is 100% and the duty of the applied voltage of the U phase. There is an energized section (overlapping energized section 753) in which both the duty of the applied voltage of the W phase and the V phase is 100% between the energized section (normal energized section 752) in which is 100%.
In FIGS. 7A to 7C, the second energization signal is 100% only in the normal energization section in which only the duty of the applied voltage of the first phase of the three phases is 100% and the duty of the applied voltage of the second phase. It has been described that the signal includes an overlapping energization section in which the duty of the applied voltage of the first phase and the second phase is 100% of the duty of the normal energization section. In other words, in the second energization signal, only the duty of the applied voltage of the first phase of the three phases is 0%, and the duty of the applied voltage of the second phase is 0%. It can be said that the signal is provided with an overlapping energized section in which the duty of the applied voltage of the first phase and the second phase is both 0% between the energized section.
Specifically, as shown in FIG. 7D, the second energization signal is the energization section (normal energization section 701) in which only the duty of the applied voltage of the U phase is 0% of the three phases and the applied voltage of the V phase. There is an energization section (overlap energization section 703) in which the duty of the applied voltage of the U phase and the V phase is both 0% between the energization section (normal energization section 702) in which only the duty is 0%. Although not shown, in the second energization signal, only the energization section (normal energization section) in which only the duty of the applied voltage of the V phase is 0% and the duty of the applied voltage of the W phase are 0%. There is an energized section (overlap energized section) between the energized section (normal energized section) and the duty of the applied voltage of the V phase and the W phase is 0%. The second energization signal includes an energization section in which only the duty of the applied voltage of the W phase is 0% (normal energization section) and an energization section in which only the duty of the applied voltage of the U phase is 0% (normally). There is an energized section (overlapping energized section) between the energized section) and the duty of the applied voltage of the W phase and the U phase is 0%.
In the following description, the drive control for energizing thebrushless motor 30 by the second energization signal may be referred to as a wide-angle trapezoidal wave energization drive.
In this way, the seconddrive control unit 642 outputs the second drive signal to the inverter 52 at the energization timing corresponding to the rotation position of the rotor 22 detected by the position detection unit 61, so that the second drive control unit 642 can transmit the second drive signal to the inverter 52. A second energization signal for driving the brushless motor 30 with a wide-angle trapezoidal wave energization is generated.
また、図7Bに示すように、第2通電信号は、3相のうちのV相の印加電圧のデューティのみが100%となる通電区間(通常通電区間731)とW相の印加電圧のデューティのみが100%となる通電区間(通常通電区間732)との間に、V相およびW相の印加電圧のデューティが共に100%となる通電区間(オーバラップ通電区間733)を有する。
また、図7Cに示すように、第2通電信号は、3相のうちのW相の印加電圧のデューティのみが100%となる通電区間(通常通電区間751)とU相の印加電圧のデューティのみが100%となる通電区間(通常通電区間752)との間に、W相およびV相の印加電圧のデューティが共に100%となる通電区間(オーバラップ通電区間753)を有する。
図7Aから図7Cでは、第2通電信号は、3相のうち第1の相の印加電圧のデューティのみが100%となる通常通電区間と第2の相の印加電圧のデューティのみが100%となる通常通電区間との間に、第1の相及び第2の相の印加電圧のデューティが共に100%のデューティとなるオーバラップ通電区間を備えた信号である点、説明した。これを言い換えると、第2通電信号は、3相のうち第1の相の印加電圧のデューティのみが0%となる通常通電区間と第2の相の印加電圧のデューティのみが0%となる通常通電区間との間に、第1の相及び第2の相の印加電圧のデューティが共に0%のデューティとなるオーバラップ通電区間を備えた信号であるともいえる。
具体的には、図7Dに示すように、第2通電信号は、3相のうちU相の印加電圧のデューティのみが0%となる通電区間(通常通電区間701)とV相の印加電圧のデューティのみが0%となる通電区間(通常通電区間702)との間に、U相およびV相の印加電圧のデューティが共に0%のデューティとなる通電区間(オーバラップ通電区間703)を有する。図示を省略するが、第2通電信号は、3相のうちV相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)とW相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)との間に、V相およびW相の印加電圧のデューティが共に0%のデューティとなる通電区間(オーバラップ通電区間)を有する。また、第2通電信号は、3相のうちW相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)とU相の印加電圧のデューティのみが0%となる通電区間(通常通電区間)との間に、W相およびU相の印加電圧のデューティが共に0%のデューティとなる通電区間(オーバラップ通電区間)を有する。
以下の説明において、第2通電信号により、ブラシレスモータ30に通電する駆動制御を広角台形波通電駆動と称する場合がある。
このように、第2駆動制御部642は、位置検出部61により検出されたロータ22の回転位置に応じた通電タイミングで第2駆動信号をインバータ52に出力することで、インバータ52に対して、ブラシレスモータ30を広角台形波通電駆動するための第2通電信号を発生させる。 As shown in FIG. 7A, in the second energization signal, only the energization section (normal energization section 711) in which only the duty of the applied voltage of the U phase of the three phases is 100% and the duty of the applied voltage of the V phase are 100. There is an energization section (overlap energization section 713) in which the duty of the applied voltage of the U phase and the V phase is 100% of the duty of the energization section (normal energization section 712).
Further, as shown in FIG. 7B, the second energization signal includes only the energization section (normal energization section 731) in which only the duty of the applied voltage of the V phase of the three phases is 100% and the duty of the applied voltage of the W phase. There is an energized section (overlapping energized section 733) in which both the duty of the applied voltage of the V phase and the W phase is 100% with the energized section (normal energized section 732) in which is 100%.
Further, as shown in FIG. 7C, the second energization signal includes only the energization section (normal energization section 751) in which only the duty of the applied voltage of the W phase of the three phases is 100% and the duty of the applied voltage of the U phase. There is an energized section (overlapping energized section 753) in which both the duty of the applied voltage of the W phase and the V phase is 100% between the energized section (normal energized section 752) in which is 100%.
In FIGS. 7A to 7C, the second energization signal is 100% only in the normal energization section in which only the duty of the applied voltage of the first phase of the three phases is 100% and the duty of the applied voltage of the second phase. It has been described that the signal includes an overlapping energization section in which the duty of the applied voltage of the first phase and the second phase is 100% of the duty of the normal energization section. In other words, in the second energization signal, only the duty of the applied voltage of the first phase of the three phases is 0%, and the duty of the applied voltage of the second phase is 0%. It can be said that the signal is provided with an overlapping energized section in which the duty of the applied voltage of the first phase and the second phase is both 0% between the energized section.
Specifically, as shown in FIG. 7D, the second energization signal is the energization section (normal energization section 701) in which only the duty of the applied voltage of the U phase is 0% of the three phases and the applied voltage of the V phase. There is an energization section (overlap energization section 703) in which the duty of the applied voltage of the U phase and the V phase is both 0% between the energization section (normal energization section 702) in which only the duty is 0%. Although not shown, in the second energization signal, only the energization section (normal energization section) in which only the duty of the applied voltage of the V phase is 0% and the duty of the applied voltage of the W phase are 0%. There is an energized section (overlap energized section) between the energized section (normal energized section) and the duty of the applied voltage of the V phase and the W phase is 0%. The second energization signal includes an energization section in which only the duty of the applied voltage of the W phase is 0% (normal energization section) and an energization section in which only the duty of the applied voltage of the U phase is 0% (normally). There is an energized section (overlapping energized section) between the energized section) and the duty of the applied voltage of the W phase and the U phase is 0%.
In the following description, the drive control for energizing the
In this way, the second
また、高出力モードにおいて、ブラシレスモータ30を広角台形波通電駆動することは、低出力モードにおいて、ブラシレスモータ30を3次高調波通電駆動することに対して、モータの出力特性を大幅に改善するためである(以下、目的1と言う)。また、高出力モードにおいて、ブラシレスモータ30を広角台形波通電駆動することは、高出力モードにおいて、ブラシレスモータ30を矩形波駆動(特許文献1及び特許文献2における広角通電駆動)することに対して、作動音を抑制することを可能とするためである(以下、目的2と言う)。
Further, in the high output mode, driving the brushless motor 30 with a wide-angle trapezoidal wave energization significantly improves the output characteristics of the motor as compared with driving the brushless motor 30 with a third harmonic energization in the low output mode. This is because (hereinafter referred to as purpose 1). Further, in the high output mode, driving the brushless motor 30 with a wide-angle trapezoidal wave energization is different from driving the brushless motor 30 with a rectangular wave (wide-angle energization drive in Patent Documents 1 and 2) in the high output mode. This is because it is possible to suppress the operating noise (hereinafter referred to as the purpose 2).
以下に、目的1及び目的2を達成するために、高出力モードにおいて、ブラシレスモータ30を広角台形波通電駆動することとした理由について、図8を用いて説明する。
図8は、第2通電信号にオーバラップ通電区間を設けることにより、モータの出力特性が向上する原理について説明するための図である。なお、図8に記す抵抗RW、抵抗RU、抵抗RVは、それぞれ、インバータ52の各スイッチング素子52a~52fおよび3相の電機子コイル21u、21v,21wから構成される回路(抵抗回路とよぶ)における基準抵抗を示すものとする。また、図8に記す矢印の大きさは、各相への印加電流の値の大きさに比例している。 Hereinafter, the reason why thebrushless motor 30 is driven by the wide-angle trapezoidal wave energization in the high output mode in order to achieve the objectives 1 and 2 will be described with reference to FIG.
FIG. 8 is a diagram for explaining the principle of improving the output characteristics of the motor by providing the overlap energization section in the second energization signal. The resistor RW, resistor RU, and resistor RV shown in FIG. 8 are circuits composed of switchingelements 52a to 52f of the inverter 52 and three- phase armature coils 21u, 21v, and 21w, respectively (referred to as a resistor circuit). It shall indicate the reference resistance in. Further, the size of the arrow shown in FIG. 8 is proportional to the size of the value of the current applied to each phase.
図8は、第2通電信号にオーバラップ通電区間を設けることにより、モータの出力特性が向上する原理について説明するための図である。なお、図8に記す抵抗RW、抵抗RU、抵抗RVは、それぞれ、インバータ52の各スイッチング素子52a~52fおよび3相の電機子コイル21u、21v,21wから構成される回路(抵抗回路とよぶ)における基準抵抗を示すものとする。また、図8に記す矢印の大きさは、各相への印加電流の値の大きさに比例している。 Hereinafter, the reason why the
FIG. 8 is a diagram for explaining the principle of improving the output characteristics of the motor by providing the overlap energization section in the second energization signal. The resistor RW, resistor RU, and resistor RV shown in FIG. 8 are circuits composed of switching
図8Aは、図7Dの電気角180°付近(図7D符号800a)の通電状態における回路図である。通電角180°付近においては、接続点21aにはW相印加電圧のデューティが100%、接続点21bにはV相印加電圧のデューティが0%、接続点21cにはU相印加電圧のデューティが50%にて通電されている。
図8Aに示すように、高出力モードのおける通常通電区間(3相通電)に駆動している際は、3相全てに通電されるため、抵抗回路における端子間抵抗Raは、抵抗RW(抵抗値R)と、抵抗RUと抵抗RVとの直列抵抗(抵抗値2R)とが、並列に配置された構成となるため、以下の式によりRa=2R/3となる。
Ra=R×2R/(R+2R)=(2/3)R
なお、抵抗回路における端子間抵抗Raとは、図4に示す直流電源51の正極端子と負極端子との間の抵抗値をいう。
ここでは、抵抗RWに流れる電流と、抵抗RUと抵抗RVとの直列抵抗とに流れる電流の大きさを比較すると、抵抗RWに流れる電流の方が、抵抗RUと抵抗RVとの直列抵抗とに流れる電流よりも大きい。 FIG. 8A is a circuit diagram in an energized state near an electric angle of 180 ° in FIG. 7D (reference numeral 800a in FIG. 7D). In the vicinity of the energization angle of 180 °, the duty of the W phase applied voltage is 100% at the connection point 21a, the duty of the V phase applied voltage is 0% at the connection point 21b, and the duty of the U phase applied voltage is at the connection point 21c. It is energized at 50%.
As shown in FIG. 8A, when driving in the normal energization section (three-phase energization) in the high output mode, all three phases are energized, so that the resistance Ra between terminals in the resistance circuit is the resistance RW (resistance). Since the value R) and the series resistance (resistance value 2R) of the resistor RU and the resistor RV are arranged in parallel, Ra = 2R / 3 according to the following equation.
Ra = R × 2R / (R + 2R) = (2/3) R
The resistance Ra between terminals in the resistance circuit means a resistance value between the positive electrode terminal and the negative electrode terminal of theDC power supply 51 shown in FIG.
Here, comparing the magnitude of the current flowing through the resistor RW and the current flowing through the series resistance of the resistor RU and the resistor RV, the current flowing through the resistor RW is the series resistance of the resistor RU and the resistor RV. It is larger than the flowing current.
図8Aに示すように、高出力モードのおける通常通電区間(3相通電)に駆動している際は、3相全てに通電されるため、抵抗回路における端子間抵抗Raは、抵抗RW(抵抗値R)と、抵抗RUと抵抗RVとの直列抵抗(抵抗値2R)とが、並列に配置された構成となるため、以下の式によりRa=2R/3となる。
Ra=R×2R/(R+2R)=(2/3)R
なお、抵抗回路における端子間抵抗Raとは、図4に示す直流電源51の正極端子と負極端子との間の抵抗値をいう。
ここでは、抵抗RWに流れる電流と、抵抗RUと抵抗RVとの直列抵抗とに流れる電流の大きさを比較すると、抵抗RWに流れる電流の方が、抵抗RUと抵抗RVとの直列抵抗とに流れる電流よりも大きい。 FIG. 8A is a circuit diagram in an energized state near an electric angle of 180 ° in FIG. 7D (
As shown in FIG. 8A, when driving in the normal energization section (three-phase energization) in the high output mode, all three phases are energized, so that the resistance Ra between terminals in the resistance circuit is the resistance RW (resistance). Since the value R) and the series resistance (resistance value 2R) of the resistor RU and the resistor RV are arranged in parallel, Ra = 2R / 3 according to the following equation.
Ra = R × 2R / (R + 2R) = (2/3) R
The resistance Ra between terminals in the resistance circuit means a resistance value between the positive electrode terminal and the negative electrode terminal of the
Here, comparing the magnitude of the current flowing through the resistor RW and the current flowing through the series resistance of the resistor RU and the resistor RV, the current flowing through the resistor RW is the series resistance of the resistor RU and the resistor RV. It is larger than the flowing current.
図8Bは、図7Aの電気角210°付近(図7A符号800b)の通電状態における回路図である。
一方、図8(b)に示すように、高出力モードのおけるオーバラップ通電区間(2相通電)に駆動している際は、2相に通電されるため、抵抗回路における端子間抵抗Rbは、抵抗RW(抵抗値R)と、抵抗RU(抵抗値R)とが、並列に配置された構成となるため、以下の式によりRb=R/2となる。
Rb=R×R/(R+R)=(1/2)R
なお、抵抗回路における端子間抵抗Rbとは、図4に示す直流電源51の正極端子と負極端子との間の抵抗値をいう。
ここでは、抵抗RWと抵抗RVとには電流が流れるが、抵抗RUには電流がほぼ流れない。言い換えると、接続点21aと接続点21cとにデューティ100%の印加電圧が印加され、かつ、接続点21bにデューティ0%の印加電圧が印加される。そのため、接続点21aと接続点21cは同電位となり、接続点21aと接続点21cとの間には電流が流れなくなる。また、接続点21aと接続点21bとの間の電位差と、接続点21cと接続点21bとの間の電位差とが等しくなり、接続点21aと接続点21bとの間に流れる電流と、接続点21cと接続点21bとの間に流れる電流とが等しくなる。その結果、抵抗RWに流れる電流の大きさと抵抗RVに流れる電流の大きさは、ほぼ同じであるが、抵抗RUには電流がほぼ流れなくなり、ブラシレスモータ30は抵抗RUの抵抗値としての影響を受けなくなる。 FIG. 8B is a circuit diagram in an energized state in the vicinity of an electric angle of 210 ° in FIG. 7A (reference numeral 800b in FIG. 7A).
On the other hand, as shown in FIG. 8B, when driving in the overlap energization section (two-phase energization) in the high output mode, the two phases are energized, so that the resistance Rb between terminals in the resistance circuit becomes Since the resistance RW (resistance value R) and the resistance RU (resistance value R) are arranged in parallel, Rb = R / 2 according to the following equation.
Rb = R × R / (R + R) = (1/2) R
The inter-terminal resistance Rb in the resistance circuit means a resistance value between the positive electrode terminal and the negative electrode terminal of theDC power supply 51 shown in FIG.
Here, a current flows through the resistor RW and the resistor RV, but almost no current flows through the resistor RU. In other words, an applied voltage of 100% duty is applied to theconnection point 21a and the connection point 21c, and an applied voltage of 0% duty is applied to the connection point 21b. Therefore, the connection point 21a and the connection point 21c have the same potential, and no current flows between the connection point 21a and the connection point 21c. Further, the potential difference between the connection point 21a and the connection point 21b and the potential difference between the connection point 21c and the connection point 21b become equal, and the current flowing between the connection point 21a and the connection point 21b and the connection point The current flowing between the 21c and the connection point 21b becomes equal. As a result, the magnitude of the current flowing through the resistor RW and the magnitude of the current flowing through the resistor RV are almost the same, but the current hardly flows through the resistor RU, and the brushless motor 30 affects the resistance value of the resistor RU. I will not receive it.
一方、図8(b)に示すように、高出力モードのおけるオーバラップ通電区間(2相通電)に駆動している際は、2相に通電されるため、抵抗回路における端子間抵抗Rbは、抵抗RW(抵抗値R)と、抵抗RU(抵抗値R)とが、並列に配置された構成となるため、以下の式によりRb=R/2となる。
Rb=R×R/(R+R)=(1/2)R
なお、抵抗回路における端子間抵抗Rbとは、図4に示す直流電源51の正極端子と負極端子との間の抵抗値をいう。
ここでは、抵抗RWと抵抗RVとには電流が流れるが、抵抗RUには電流がほぼ流れない。言い換えると、接続点21aと接続点21cとにデューティ100%の印加電圧が印加され、かつ、接続点21bにデューティ0%の印加電圧が印加される。そのため、接続点21aと接続点21cは同電位となり、接続点21aと接続点21cとの間には電流が流れなくなる。また、接続点21aと接続点21bとの間の電位差と、接続点21cと接続点21bとの間の電位差とが等しくなり、接続点21aと接続点21bとの間に流れる電流と、接続点21cと接続点21bとの間に流れる電流とが等しくなる。その結果、抵抗RWに流れる電流の大きさと抵抗RVに流れる電流の大きさは、ほぼ同じであるが、抵抗RUには電流がほぼ流れなくなり、ブラシレスモータ30は抵抗RUの抵抗値としての影響を受けなくなる。 FIG. 8B is a circuit diagram in an energized state in the vicinity of an electric angle of 210 ° in FIG. 7A (reference numeral 800b in FIG. 7A).
On the other hand, as shown in FIG. 8B, when driving in the overlap energization section (two-phase energization) in the high output mode, the two phases are energized, so that the resistance Rb between terminals in the resistance circuit becomes Since the resistance RW (resistance value R) and the resistance RU (resistance value R) are arranged in parallel, Rb = R / 2 according to the following equation.
Rb = R × R / (R + R) = (1/2) R
The inter-terminal resistance Rb in the resistance circuit means a resistance value between the positive electrode terminal and the negative electrode terminal of the
Here, a current flows through the resistor RW and the resistor RV, but almost no current flows through the resistor RU. In other words, an applied voltage of 100% duty is applied to the
このように、オーバラップ通電区間に切り替えることで、通電される回路が3相から2相となり、抵抗計算結果が2R/3からR/2になることで、モータ内部抵抗を、(2R/3-R/2)/(2R/3)=1/4=25%低減することが可能となる。
つまり、モータ内部抵抗が下がることで、銅損低減の効果によりモータの出力特性が向上する。 In this way, by switching to the overlap energization section, the circuit to be energized changes from 3 phase to 2 phase, and the resistance calculation result changes from 2R / 3 to R / 2, so that the motor internal resistance is changed to (2R / 3). -R / 2) / (2R / 3) = 1/4 = 25% can be reduced.
That is, by lowering the internal resistance of the motor, the output characteristics of the motor are improved due to the effect of reducing copper loss.
つまり、モータ内部抵抗が下がることで、銅損低減の効果によりモータの出力特性が向上する。 In this way, by switching to the overlap energization section, the circuit to be energized changes from 3 phase to 2 phase, and the resistance calculation result changes from 2R / 3 to R / 2, so that the motor internal resistance is changed to (2R / 3). -R / 2) / (2R / 3) = 1/4 = 25% can be reduced.
That is, by lowering the internal resistance of the motor, the output characteristics of the motor are improved due to the effect of reducing copper loss.
図9は、本実施形態における3次高調波通電駆動及び広角台形波通電駆動におけるブラシレスモータ30のモータ特性を示す図である。
図9において、L1は、3次高調波通電駆動のモータ特性を示す。また、H1は広角台形波通電駆動のモータ特性を示す。また、H1Sは、広角台形波+「進角>0°」通電駆動のモータ特性を示す。ここで、広角台形波+「進角>0°」通電駆動とは、ロータ22の回転位置を基準として所定の電気角だけ進角させた通電タイミングで第2通電信号を出力し、ブラシレスモータの3相の各相を正弦波駆動する広角台形波通電駆動をいう。
また、出力特性Lで示した領域は低い車速の低速作動モードにおいて要求される一払拭周期でのモータ特性を示す。また、出力特性Hで示した領域は高速走行時の高速作動モードに要求される一払拭周期でのモータ特性を示す。
図9に示すように、駆動制御部64は、低出力モードにおいて、3次高調波通電駆動を行うことで、低速作動モードで要求される一払拭周期でのモータ特性を満足することができる。
また、駆動制御部64は、低出力モードから高出力モードに移行した場合には、広角台形波通電駆動を実行する。すなわち、駆動制御部64は、低出力モードにおける3次高調波通電駆動に比べて、広角台形波通電駆動および広角台形波+「進角>0°」通電駆動により、ブラシレスモータ30の回転数を上昇させるとともに、回転数の上昇によるトルクの低下を防止し、高トルクを発生させることができる。すなわち、上記目的1が達成されたと言える。また、駆動制御部64は、広角台形波通電駆動またはおよび広角台形波+「進角>0°」通電駆動を行うことで、高速作動モードで要求される一払拭周期でのモータ特性を満足することができる。 FIG. 9 is a diagram showing the motor characteristics of thebrushless motor 30 in the third harmonic energization drive and the wide-angle trapezoidal wave energization drive in the present embodiment.
In FIG. 9, L1 shows the motor characteristics of the third harmonic energization drive. Further, H1 shows the motor characteristics of the wide-angle trapezoidal wave energization drive. Further, H1S shows the motor characteristics of a wide-angle trapezoidal wave + "advance angle> 0 °" energized drive. Here, the wide-angle trapezoidal wave + "advance angle> 0 °" energization drive outputs a second energization signal at an energization timing in which a predetermined electric angle is advanced with reference to the rotation position of therotor 22, and the brushless motor Wide-angle trapezoidal wave energization drive that drives each of the three phases with a sine wave.
Further, the region indicated by the output characteristic L indicates the motor characteristics in the one-wiping cycle required in the low-speed operation mode at a low vehicle speed. Further, the region indicated by the output characteristic H indicates the motor characteristics in the one-wiping cycle required for the high-speed operation mode during high-speed running.
As shown in FIG. 9, thedrive control unit 64 can satisfy the motor characteristics in the one-wiping cycle required in the low-speed operation mode by performing the third-order harmonic energization drive in the low output mode.
Further, thedrive control unit 64 executes wide-angle trapezoidal wave energization drive when the mode shifts from the low output mode to the high output mode. That is, the drive control unit 64 reduces the rotation speed of the brushless motor 30 by the wide-angle trapezoidal wave energization drive and the wide-angle trapezoidal wave + "advance angle> 0 °" energization drive as compared with the third harmonic energization drive in the low output mode. In addition to increasing the torque, it is possible to prevent a decrease in torque due to an increase in the number of revolutions and generate a high torque. That is, it can be said that the above object 1 has been achieved. Further, the drive control unit 64 satisfies the motor characteristics in the one-wiping cycle required in the high-speed operation mode by performing wide-angle trapezoidal wave energization drive or wide-angle trapezoidal wave + "advance angle> 0 °" energization drive. be able to.
図9において、L1は、3次高調波通電駆動のモータ特性を示す。また、H1は広角台形波通電駆動のモータ特性を示す。また、H1Sは、広角台形波+「進角>0°」通電駆動のモータ特性を示す。ここで、広角台形波+「進角>0°」通電駆動とは、ロータ22の回転位置を基準として所定の電気角だけ進角させた通電タイミングで第2通電信号を出力し、ブラシレスモータの3相の各相を正弦波駆動する広角台形波通電駆動をいう。
また、出力特性Lで示した領域は低い車速の低速作動モードにおいて要求される一払拭周期でのモータ特性を示す。また、出力特性Hで示した領域は高速走行時の高速作動モードに要求される一払拭周期でのモータ特性を示す。
図9に示すように、駆動制御部64は、低出力モードにおいて、3次高調波通電駆動を行うことで、低速作動モードで要求される一払拭周期でのモータ特性を満足することができる。
また、駆動制御部64は、低出力モードから高出力モードに移行した場合には、広角台形波通電駆動を実行する。すなわち、駆動制御部64は、低出力モードにおける3次高調波通電駆動に比べて、広角台形波通電駆動および広角台形波+「進角>0°」通電駆動により、ブラシレスモータ30の回転数を上昇させるとともに、回転数の上昇によるトルクの低下を防止し、高トルクを発生させることができる。すなわち、上記目的1が達成されたと言える。また、駆動制御部64は、広角台形波通電駆動またはおよび広角台形波+「進角>0°」通電駆動を行うことで、高速作動モードで要求される一払拭周期でのモータ特性を満足することができる。 FIG. 9 is a diagram showing the motor characteristics of the
In FIG. 9, L1 shows the motor characteristics of the third harmonic energization drive. Further, H1 shows the motor characteristics of the wide-angle trapezoidal wave energization drive. Further, H1S shows the motor characteristics of a wide-angle trapezoidal wave + "advance angle> 0 °" energized drive. Here, the wide-angle trapezoidal wave + "advance angle> 0 °" energization drive outputs a second energization signal at an energization timing in which a predetermined electric angle is advanced with reference to the rotation position of the
Further, the region indicated by the output characteristic L indicates the motor characteristics in the one-wiping cycle required in the low-speed operation mode at a low vehicle speed. Further, the region indicated by the output characteristic H indicates the motor characteristics in the one-wiping cycle required for the high-speed operation mode during high-speed running.
As shown in FIG. 9, the
Further, the
図10、図11は、低出力モードまたは高出力モードに用いる駆動制御におけるブラシレスモータ30の作動音の特性を示す図である。
図10は、ブラシレスモータ30の駆動制御を、低(Lo)出力モードまたは高(Hi)出力モードにおいて、下記6つの駆動制御(第1~第6駆動制御)で行い、ロータ22の回転周波数に対応する作動音を、周波数帯域(0~15KHz)においてFFT(Fast
Fourier Transform:高速フーリエ変換)したO.A(Over All:オーバーオール)値を示している。ここで、O.A値とは、周波数特性に注目せずに、単に音がうるさいとか静かであるとかを評価する際に用いられる値である。
また、図11は、ブラシレスモータ30の駆動制御を、低出力モードまたは高出力モードにおいて、下記6つの駆動制御(第1~第6駆動制御)で行い、ロータ22の回転周波数に対応する作動音である磁気音を、ロータ22の回転周波数が530Hz~590Hzのとき(Lo出力モード)、または790Hz~850Hzのとき(Hi出力モード)に測定した値を示している。 10 and 11 are diagrams showing the characteristics of the operating noise of thebrushless motor 30 in the drive control used in the low output mode or the high output mode.
FIG. 10 shows that the drive control of thebrushless motor 30 is performed by the following six drive controls (1st to 6th drive controls) in the low (Lo) output mode or the high (Hi) output mode to obtain the rotation frequency of the rotor 22. The corresponding operating sound is FFT (Fast) in the frequency band (0 to 15 KHz).
Fourier Transform) It shows the A (Over All) value. Here, O. The A value is a value used when simply evaluating whether the sound is noisy or quiet without paying attention to the frequency characteristics.
Further, FIG. 11 shows that the drive control of thebrushless motor 30 is performed by the following six drive controls (first to sixth drive controls) in the low output mode or the high output mode, and the operating sound corresponding to the rotation frequency of the rotor 22. The magnetic sound is measured when the rotation frequency of the rotor 22 is 530 Hz to 590 Hz (Lo output mode) or when the rotation frequency is 790 Hz to 850 Hz (Hi output mode).
図10は、ブラシレスモータ30の駆動制御を、低(Lo)出力モードまたは高(Hi)出力モードにおいて、下記6つの駆動制御(第1~第6駆動制御)で行い、ロータ22の回転周波数に対応する作動音を、周波数帯域(0~15KHz)においてFFT(Fast
Fourier Transform:高速フーリエ変換)したO.A(Over All:オーバーオール)値を示している。ここで、O.A値とは、周波数特性に注目せずに、単に音がうるさいとか静かであるとかを評価する際に用いられる値である。
また、図11は、ブラシレスモータ30の駆動制御を、低出力モードまたは高出力モードにおいて、下記6つの駆動制御(第1~第6駆動制御)で行い、ロータ22の回転周波数に対応する作動音である磁気音を、ロータ22の回転周波数が530Hz~590Hzのとき(Lo出力モード)、または790Hz~850Hzのとき(Hi出力モード)に測定した値を示している。 10 and 11 are diagrams showing the characteristics of the operating noise of the
FIG. 10 shows that the drive control of the
Fourier Transform) It shows the A (Over All) value. Here, O. The A value is a value used when simply evaluating whether the sound is noisy or quiet without paying attention to the frequency characteristics.
Further, FIG. 11 shows that the drive control of the
(第1駆動制御)
第1駆動制御は、低出力モードにおいて、矩形波駆動で行う駆動制御であって、特許文献1の矩形波駆動が対応する。
(第2駆動制御)
第2駆動制御は、低出力モードにおいて、3次高調波駆動(正弦波駆動)で行う駆動制御であって、特許文献2および本実施形態の正弦波駆動が対応する。
(第3駆動制御)
第3駆動制御は、高出力モードにおいて、矩形波通電(広角通電)で行う駆動制御であって、特許文献2の矩形波駆動が対応する。
(第4駆動制御)
第4駆動制御は、高出力モードにおいて、広角台形波通電駆動(正弦波駆動)で行う駆動制御であって、本実施形態の正弦波駆動が対応する。
(第5駆動制御)
第5駆動制御は、高出力モードにおいて、広角台形波+「進角10°」の通電駆動(正弦波駆動)で行う駆動制御であって、本実施形態の正弦波駆動が対応する。
(第6駆動制御)
第6駆動制御は、高出力モードにおいて、広角台形波+「進角30°」の通電駆動(正弦波駆動)で行う駆動制御であって、本実施形態の正弦波駆動が対応する。 (1st drive control)
The first drive control is a drive control performed by a rectangular wave drive in the low output mode, and corresponds to the rectangular wave drive ofPatent Document 1.
(Second drive control)
The second drive control is a drive control performed by a third harmonic drive (sine wave drive) in the low output mode, and is supported byPatent Document 2 and the sine wave drive of the present embodiment.
(Third drive control)
The third drive control is a drive control performed by rectangular wave energization (wide-angle energization) in the high output mode, and corresponds to the rectangular wave drive ofPatent Document 2.
(4th drive control)
The fourth drive control is a drive control performed by a wide-angle trapezoidal wave energization drive (sine wave drive) in the high output mode, and corresponds to the sine wave drive of the present embodiment.
(Fifth drive control)
The fifth drive control is a drive control performed by a wide-angle trapezoidal wave + energization drive (sine wave drive) of "advance angle 10 °" in the high output mode, and corresponds to the sine wave drive of the present embodiment.
(6th drive control)
The sixth drive control is a drive control performed by a wide-angle trapezoidal wave + energization drive (sine wave drive) of "advance angle 30 °" in the high output mode, and corresponds to the sine wave drive of the present embodiment.
第1駆動制御は、低出力モードにおいて、矩形波駆動で行う駆動制御であって、特許文献1の矩形波駆動が対応する。
(第2駆動制御)
第2駆動制御は、低出力モードにおいて、3次高調波駆動(正弦波駆動)で行う駆動制御であって、特許文献2および本実施形態の正弦波駆動が対応する。
(第3駆動制御)
第3駆動制御は、高出力モードにおいて、矩形波通電(広角通電)で行う駆動制御であって、特許文献2の矩形波駆動が対応する。
(第4駆動制御)
第4駆動制御は、高出力モードにおいて、広角台形波通電駆動(正弦波駆動)で行う駆動制御であって、本実施形態の正弦波駆動が対応する。
(第5駆動制御)
第5駆動制御は、高出力モードにおいて、広角台形波+「進角10°」の通電駆動(正弦波駆動)で行う駆動制御であって、本実施形態の正弦波駆動が対応する。
(第6駆動制御)
第6駆動制御は、高出力モードにおいて、広角台形波+「進角30°」の通電駆動(正弦波駆動)で行う駆動制御であって、本実施形態の正弦波駆動が対応する。 (1st drive control)
The first drive control is a drive control performed by a rectangular wave drive in the low output mode, and corresponds to the rectangular wave drive of
(Second drive control)
The second drive control is a drive control performed by a third harmonic drive (sine wave drive) in the low output mode, and is supported by
(Third drive control)
The third drive control is a drive control performed by rectangular wave energization (wide-angle energization) in the high output mode, and corresponds to the rectangular wave drive of
(4th drive control)
The fourth drive control is a drive control performed by a wide-angle trapezoidal wave energization drive (sine wave drive) in the high output mode, and corresponds to the sine wave drive of the present embodiment.
(Fifth drive control)
The fifth drive control is a drive control performed by a wide-angle trapezoidal wave + energization drive (sine wave drive) of "
(6th drive control)
The sixth drive control is a drive control performed by a wide-angle trapezoidal wave + energization drive (sine wave drive) of "
図10、図11に示すように、低出力モードにおいては、O.A値、磁気音ともに、第1駆動制御より第2駆動制御の方が、作動音は抑制されていることがわかる。
また、高出力モードにおいては、第3駆動制御より第4~6駆動制御の方が、作動音は抑制されていることがわかる。
すなわち、特許文献2であった「低速作動モードにおけるブラシレスモータの作動音と、高速作動モードにおけるブラシレスモータの作動音との間で、音圧差が大きく、高速作動モードにおけるブラシレスモータの音圧が、低速作動モードにおけるブラシレスモータの音圧に比べ、極端に大きいといった」問題を解決できている。つまり、本実施形態においては、高出力モードにおいて、広角台形波通電駆動で駆動制御を行うことにより、高出力モードにおいて、矩形波通電(広角通電)で行う駆動制御(特許文献2の矩形波通電(広角通電))に対して作動音を抑制することができている。すなわち、上記目的2が達成されたと言える。 As shown in FIGS. 10 and 11, in the low output mode, O.D. It can be seen that both the A value and the magnetic sound are suppressed in the second drive control than in the first drive control.
Further, in the high output mode, it can be seen that the operating noise is suppressed in the 4th to 6th drive controls rather than the 3rd drive control.
That is, the sound pressure difference between the operating sound of the brushless motor in the low-speed operation mode and the operating sound of the brushless motor in the high-speed operation mode is large, and the sound pressure of the brushless motor in the high-speed operation mode is the same as inPatent Document 2. The problem of "extremely high sound pressure compared to the sound pressure of a brushless motor in low-speed operation mode" has been solved. That is, in the present embodiment, the drive control is performed by the wide-angle trapezoidal wave energization drive in the high output mode, and the drive control is performed by the square wave energization (wide-angle energization) in the high output mode (square wave energization of Patent Document 2). (Wide-angle energization)), the operating noise can be suppressed. That is, it can be said that the above object 2 has been achieved.
また、高出力モードにおいては、第3駆動制御より第4~6駆動制御の方が、作動音は抑制されていることがわかる。
すなわち、特許文献2であった「低速作動モードにおけるブラシレスモータの作動音と、高速作動モードにおけるブラシレスモータの作動音との間で、音圧差が大きく、高速作動モードにおけるブラシレスモータの音圧が、低速作動モードにおけるブラシレスモータの音圧に比べ、極端に大きいといった」問題を解決できている。つまり、本実施形態においては、高出力モードにおいて、広角台形波通電駆動で駆動制御を行うことにより、高出力モードにおいて、矩形波通電(広角通電)で行う駆動制御(特許文献2の矩形波通電(広角通電))に対して作動音を抑制することができている。すなわち、上記目的2が達成されたと言える。 As shown in FIGS. 10 and 11, in the low output mode, O.D. It can be seen that both the A value and the magnetic sound are suppressed in the second drive control than in the first drive control.
Further, in the high output mode, it can be seen that the operating noise is suppressed in the 4th to 6th drive controls rather than the 3rd drive control.
That is, the sound pressure difference between the operating sound of the brushless motor in the low-speed operation mode and the operating sound of the brushless motor in the high-speed operation mode is large, and the sound pressure of the brushless motor in the high-speed operation mode is the same as in
なお、駆動制御部64は、モード判定部63から停止信号を取得した場合には、第1駆動制御部641又は第2駆動制御部642によるブラシレスモータ30の駆動を停止する。すなわち、駆動制御部64は、モード判定部63から停止信号を取得した場合には、ブラシレスモータ30の駆動を停止し、ワイパアーム14,16の揺動動作を停止させる。
When the drive control unit 64 acquires a stop signal from the mode determination unit 63, the drive control unit 64 stops the drive of the brushless motor 30 by the first drive control unit 641 or the second drive control unit 642. That is, when the drive control unit 64 acquires the stop signal from the mode determination unit 63, the drive control unit 64 stops the drive of the brushless motor 30 and stops the swinging operation of the wiper arms 14 and 16.
次に、高出力モードにおいてインバータ52が第2通電信号を生成する方法について説明する。以下の説明において、インバータ52から電機子コイル21u,21v,21wの各相に印加する印加電圧のデューティをFET_Duty [%]とし、制御部54(第2駆動制御部642)からインバータ52に対して出力する指示信号に含まれる、インバータ52が各相へ印加する印加電圧の指令値が示すデューティをSoftware_Duty[%]と表現する。
先述の通り、モータ制御装置33は、低出力モードの場合、図6に示すように、3次高調波重畳波の山においてFET_Dutyが約100%となり、谷においてFET_Dutyが約0%となるように設定されている。
図7Aから図7Dに示すように、高出力モードにおいて、第2通電信号は広角台形波である。つまり、第2通電信号は、第1通電信号の振幅をFET_Dutyにおける50%よりも大きな値に変化させた波形において、FET_Dutyが100%以上となる通電区間はFET_Dutyを100%とし、かつ、FET_Dutyが0%以下となる通電区間はFET_Dutyを0%とした波形である。
言い換えると、モータ制御装置33は、高出力モードの場合、3次高調波重畳波の山においてFET_Dutyが100%よりも大きな値(例えば、100%を超えるデューティであって、130%程度までの範囲のいずれかのデューティ)となり、谷においてFET_Dutyが0%未満の値(例えば、0%を下回るデューティであって、-30%程度までの範囲のいずれかのデューティ)となるように設定されている。実際には、インバータ52が物理的に出力可能な印加電圧の最大値はFET_Duty=100%に対応する印加電圧であり、最小値はFET_Duty=0%に対応する印加電圧である。よって、インバータ52は、FET_Dutyが100%よりも大きな値に設定されている通電区間において、FET_Duty=100%に対応する印加電圧を出力する。また、インバータ52は、FET_Dutyが0%未満の値に設定されている通電区間において、FET_Duty=0%に対応する印加電圧を出力する。これにより、3次高調波重畳波の山および谷の付近で、印加電圧が一定値となる区間が生じ、広角台形波を生成することができる。
これを、図12および図13を用いて説明する。 Next, a method in which theinverter 52 generates a second energization signal in the high output mode will be described. In the following description, the duty of the applied voltage applied from the inverter 52 to each phase of the armature coils 21u, 21v, 21w is set to FET_Duty [%], and the control unit 54 (second drive control unit 642) applies to the inverter 52. The duty indicated by the command value of the applied voltage applied to each phase by the inverter 52 included in the output instruction signal is expressed as Software_Duty [%].
As described above, in the low output mode, themotor control device 33 has a FET_Duty of about 100% at the peak of the third harmonic superimposed wave and a FET_Duty of about 0% at the valley, as shown in FIG. It is set.
As shown in FIGS. 7A to 7D, in the high output mode, the second energization signal is a wide-angle trapezoidal wave. That is, in the second energization signal, in the waveform in which the amplitude of the first energization signal is changed to a value larger than 50% in FET_Duty, the energization section in which FET_Duty is 100% or more has FET_Duty of 100% and FET_Duty. The energized section of 0% or less is a waveform with FET_Duty set to 0%.
In other words, in the high output mode, themotor control device 33 has a FET_Duty value larger than 100% in the peak of the third harmonic superimposed wave (for example, a duty exceeding 100% and a range of up to about 130%). The duty is set to be less than 0% in the valley (for example, the duty is less than 0% and any duty in the range up to about -30%). .. Actually, the maximum value of the applied voltage that can be physically output by the inverter 52 is the applied voltage corresponding to FET_Duty = 100%, and the minimum value is the applied voltage corresponding to FET_Duty = 0%. Therefore, the inverter 52 outputs the applied voltage corresponding to FET_Duty = 100% in the energized section in which FET_Duty is set to a value larger than 100%. Further, the inverter 52 outputs an applied voltage corresponding to FET_Duty = 0% in the energized section in which FET_Duty is set to a value less than 0%. As a result, a section in which the applied voltage becomes a constant value is generated in the vicinity of the peaks and valleys of the third harmonic superimposed wave, and a wide-angle trapezoidal wave can be generated.
This will be described with reference to FIGS. 12 and 13.
先述の通り、モータ制御装置33は、低出力モードの場合、図6に示すように、3次高調波重畳波の山においてFET_Dutyが約100%となり、谷においてFET_Dutyが約0%となるように設定されている。
図7Aから図7Dに示すように、高出力モードにおいて、第2通電信号は広角台形波である。つまり、第2通電信号は、第1通電信号の振幅をFET_Dutyにおける50%よりも大きな値に変化させた波形において、FET_Dutyが100%以上となる通電区間はFET_Dutyを100%とし、かつ、FET_Dutyが0%以下となる通電区間はFET_Dutyを0%とした波形である。
言い換えると、モータ制御装置33は、高出力モードの場合、3次高調波重畳波の山においてFET_Dutyが100%よりも大きな値(例えば、100%を超えるデューティであって、130%程度までの範囲のいずれかのデューティ)となり、谷においてFET_Dutyが0%未満の値(例えば、0%を下回るデューティであって、-30%程度までの範囲のいずれかのデューティ)となるように設定されている。実際には、インバータ52が物理的に出力可能な印加電圧の最大値はFET_Duty=100%に対応する印加電圧であり、最小値はFET_Duty=0%に対応する印加電圧である。よって、インバータ52は、FET_Dutyが100%よりも大きな値に設定されている通電区間において、FET_Duty=100%に対応する印加電圧を出力する。また、インバータ52は、FET_Dutyが0%未満の値に設定されている通電区間において、FET_Duty=0%に対応する印加電圧を出力する。これにより、3次高調波重畳波の山および谷の付近で、印加電圧が一定値となる区間が生じ、広角台形波を生成することができる。
これを、図12および図13を用いて説明する。 Next, a method in which the
As described above, in the low output mode, the
As shown in FIGS. 7A to 7D, in the high output mode, the second energization signal is a wide-angle trapezoidal wave. That is, in the second energization signal, in the waveform in which the amplitude of the first energization signal is changed to a value larger than 50% in FET_Duty, the energization section in which FET_Duty is 100% or more has FET_Duty of 100% and FET_Duty. The energized section of 0% or less is a waveform with FET_Duty set to 0%.
In other words, in the high output mode, the
This will be described with reference to FIGS. 12 and 13.
図12は、本実施形態における第2駆動制御部642によるU、V、W各相の通電タイミングを示すタイミングチャートである。図13は、本実施形態におけるソフトウエア(software)のバリエーションを示すタイミングチャートである。
図12、図13の横軸に示す0°~360°の角度は、図7Aから図7Dと同様に第2通電信号の1周期内における通電期間を表す電気角である。また、第1縦軸(図中の左側の縦軸)はFET_Duty[%]を表す。また、第2縦軸(図中の右側の縦軸)はsoftware_Duty[%]を表す。 FIG. 12 is a timing chart showing the energization timings of the U, V, and W phases by the seconddrive control unit 642 in the present embodiment. FIG. 13 is a timing chart showing variations of the software (software) in the present embodiment.
The angles from 0 ° to 360 ° shown on the horizontal axes of FIGS. 12 and 13 are electric angles representing the energization period within one cycle of the second energization signal as in FIGS. 7A to 7D. The first vertical axis (the vertical axis on the left side in the figure) represents FET_Duty [%]. The second vertical axis (vertical axis on the right side in the figure) represents software_Duty [%].
図12、図13の横軸に示す0°~360°の角度は、図7Aから図7Dと同様に第2通電信号の1周期内における通電期間を表す電気角である。また、第1縦軸(図中の左側の縦軸)はFET_Duty[%]を表す。また、第2縦軸(図中の右側の縦軸)はsoftware_Duty[%]を表す。 FIG. 12 is a timing chart showing the energization timings of the U, V, and W phases by the second
The angles from 0 ° to 360 ° shown on the horizontal axes of FIGS. 12 and 13 are electric angles representing the energization period within one cycle of the second energization signal as in FIGS. 7A to 7D. The first vertical axis (the vertical axis on the left side in the figure) represents FET_Duty [%]. The second vertical axis (vertical axis on the right side in the figure) represents software_Duty [%].
ここで、図12は、制御部54の指令によりインバータ52が制御動作を行う際に用いるソフトウエア(software)とU、V、W各相へ印加電圧を印加するFETとにおいて、それぞれが認識するスケールを異ならしている場合の実施例を示している。software_Duty[%]=80~100%のとき、FET_Duty[%]=100~130%となっているが、見かけ上のFET_Duty[%](実際に各相に印加される印加電圧のデューティ)は、図12中の太線で記載されるように100%となっている。
また、図13は、制御部54の指令によりインバータ52が制御動作を行う際に用いるソフトウエア(software)をDuty100%以上の出力が可能なものとした場合の実施例を示している。software_Duty[%]=100~130%のとき、FET_Duty[%]=100~130%となっているが、見かけ上のFET_Duty[%](実際に各相に印加される印加電圧のデューティ)は、図13中の太線で記載されるように100%となっている。 Here, FIG. 12 is recognized by the software (software) used when theinverter 52 performs the control operation by the command of the control unit 54 and the FET that applies the applied voltage to each of the U, V, and W phases. An example is shown when the scales are different. When software_Duty [%] = 80 to 100%, FET_Duty [%] = 100 to 130%, but the apparent FET_Duty [%] (duty of the applied voltage actually applied to each phase) is It is 100% as shown by the thick line in FIG.
Further, FIG. 13 shows an example in which the software (software) used when theinverter 52 performs the control operation by the command of the control unit 54 is capable of outputting 100% or more of the duty. When software_Duty [%] = 100 to 130%, FET_Duty [%] = 100 to 130%, but the apparent FET_Duty [%] (duty of the applied voltage actually applied to each phase) is As shown by the thick line in FIG. 13, it is 100%.
また、図13は、制御部54の指令によりインバータ52が制御動作を行う際に用いるソフトウエア(software)をDuty100%以上の出力が可能なものとした場合の実施例を示している。software_Duty[%]=100~130%のとき、FET_Duty[%]=100~130%となっているが、見かけ上のFET_Duty[%](実際に各相に印加される印加電圧のデューティ)は、図13中の太線で記載されるように100%となっている。 Here, FIG. 12 is recognized by the software (software) used when the
Further, FIG. 13 shows an example in which the software (software) used when the
以下に、本実施形態における制御部54の処理の流れについて、図14および図15を用いて説明する。図14は、本実施形態における制御部54の処理の流れについて説明する図である。図15は、本実施形態における図14の変形例を説明する図である。
制御部54は、運転者によりワイパスイッチ37が低速作動側に操作されたか否かを判定する(ステップS101)。例えば、制御部54は、ワイパスイッチ37から低速作動モード信号を取得した場合に、ワイパスイッチ37が低速作動側に操作されたと判定する。制御部54は、運転者によりワイパスイッチ37が低速作動側に操作された場合、ブラシレスモータ30を3次高調波通電駆動する(ステップS102)。 The processing flow of thecontrol unit 54 in the present embodiment will be described below with reference to FIGS. 14 and 15. FIG. 14 is a diagram illustrating a processing flow of the control unit 54 in the present embodiment. FIG. 15 is a diagram illustrating a modified example of FIG. 14 in the present embodiment.
Thecontrol unit 54 determines whether or not the wiper switch 37 has been operated by the driver on the low-speed operation side (step S101). For example, when the control unit 54 acquires the low-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the low-speed operation side. When the wiper switch 37 is operated to the low-speed operation side by the driver, the control unit 54 drives the brushless motor 30 to energize the third harmonic (step S102).
制御部54は、運転者によりワイパスイッチ37が低速作動側に操作されたか否かを判定する(ステップS101)。例えば、制御部54は、ワイパスイッチ37から低速作動モード信号を取得した場合に、ワイパスイッチ37が低速作動側に操作されたと判定する。制御部54は、運転者によりワイパスイッチ37が低速作動側に操作された場合、ブラシレスモータ30を3次高調波通電駆動する(ステップS102)。 The processing flow of the
The
一方、制御部54は、運転者によりワイパスイッチ37が低速作動側に操作されていない場合、ワイパスイッチ37が高速作動側に操作されたか否かを判定する(ステップS103)。例えば、制御部54は、ワイパスイッチ37から高速作動モード信号を取得した場合に、ワイパスイッチ37が高速作動側に操作されたと判定する。制御部54は、運転者によりワイパスイッチ37が高速作動側に操作された場合、ブラシレスモータ30を広角台形波通電駆動する(ステップS104)。
On the other hand, when the wiper switch 37 is not operated by the driver on the low speed operation side, the control unit 54 determines whether or not the wiper switch 37 is operated on the high speed operation side (step S103). For example, when the control unit 54 acquires the high-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the high-speed operation side. The control unit 54 drives the brushless motor 30 with a wide-angle trapezoidal wave energization when the wiper switch 37 is operated to the high-speed operation side by the driver (step S104).
また、図14に示した本実施形態における制御部54の処理の流れを、図15に示す制御部54の処理の流れとしてもよい。
制御部54は、運転者によりワイパスイッチ37が低速作動側に操作されたか否かを判定する(ステップS201)。例えば、制御部54は、ワイパスイッチ37から低速作動モード信号を取得した場合に、ワイパスイッチ37が低速作動側に操作されたと判定する。制御部54は、運転者によりワイパスイッチ37が低速作動側に操作された場合、高出力モードが必要か否かを判定する(ステップS202)。制御部54は、高出力モードが必要ないと判定した場合に、ブラシレスモータ30を3次高調波通電駆動する(ステップS203)。 Further, the processing flow of thecontrol unit 54 in the present embodiment shown in FIG. 14 may be the processing flow of the control unit 54 shown in FIG.
Thecontrol unit 54 determines whether or not the wiper switch 37 has been operated by the driver on the low-speed operation side (step S201). For example, when the control unit 54 acquires the low-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the low-speed operation side. The control unit 54 determines whether or not the high output mode is necessary when the wiper switch 37 is operated to the low speed operation side by the driver (step S202). When the control unit 54 determines that the high output mode is not necessary, the control unit 54 drives the brushless motor 30 to energize the third harmonic (step S203).
制御部54は、運転者によりワイパスイッチ37が低速作動側に操作されたか否かを判定する(ステップS201)。例えば、制御部54は、ワイパスイッチ37から低速作動モード信号を取得した場合に、ワイパスイッチ37が低速作動側に操作されたと判定する。制御部54は、運転者によりワイパスイッチ37が低速作動側に操作された場合、高出力モードが必要か否かを判定する(ステップS202)。制御部54は、高出力モードが必要ないと判定した場合に、ブラシレスモータ30を3次高調波通電駆動する(ステップS203)。 Further, the processing flow of the
The
一方、制御部54は、運転者によりワイパスイッチ37が低速作動側に操作されていない場合、ワイパスイッチ37が高速作動側に操作されたか否かを判定する(ステップS204)。例えば、制御部54は、ワイパスイッチ37から高速作動モード信号を取得した場合に、ワイパスイッチ37が高速作動側に操作されたと判定する。制御部54は、運転者によりワイパスイッチ37が高速作動側に操作された場合、高出力モードが必要か否かを判定する(ステップS205)。制御部54は、高出力モードが必要と判定した場合に、ブラシレスモータ30を広角台形波通電駆動する(ステップS206)。
On the other hand, when the wiper switch 37 is not operated by the driver on the low speed operation side, the control unit 54 determines whether or not the wiper switch 37 is operated on the high speed operation side (step S204). For example, when the control unit 54 acquires the high-speed operation mode signal from the wiper switch 37, the control unit 54 determines that the wiper switch 37 has been operated to the high-speed operation side. The control unit 54 determines whether or not the high output mode is necessary when the wiper switch 37 is operated by the driver to the high-speed operation side (step S205). When the control unit 54 determines that the high output mode is necessary, the control unit 54 drives the brushless motor 30 by energizing a wide-angle trapezoidal wave (step S206).
さらに、制御部54は、ステップS201の処理においてワイパスイッチ37が低速作動側に操作されたと判定し、且つステップS202の処理において高出力モードが必要と判定した場合に、ブラシレスモータ30を広角台形波通電駆動する。また、制御部54は、ステップS204の処理においてワイパスイッチ37が高速作動側に操作されたと判定し、且つステップS205の処理において高出力モードが必要ないと判定した場合に、ブラシレスモータ30を3次高調波通電駆動する。
Further, when the control unit 54 determines that the wiper switch 37 has been operated to the low speed operation side in the process of step S201 and determines that the high output mode is necessary in the process of step S202, the control unit 54 causes the brushless motor 30 to have a wide-angle trapezoidal wave. Energized drive. Further, when the control unit 54 determines that the wiper switch 37 has been operated to the high-speed operation side in the process of step S204 and determines that the high output mode is not required in the process of step S205, the brushless motor 30 is tertiary. Harmonic energization drive.
このような構成とすることで、ワイパスイッチ37が低速作動側にあるか高速作動側にあるかによらず、制御部54によって低出力モードと高出力モードとを適宜切替えることができる。これにより、雨量の変化などの外部環境の変化や車速の変化などによるフロントガラス11(払拭面)上の状況変化へ対応することが可能となる。
With such a configuration, the control unit 54 can appropriately switch between the low output mode and the high output mode regardless of whether the wiper switch 37 is on the low speed operation side or the high speed operation side. This makes it possible to respond to changes in the external environment such as changes in rainfall and changes in the conditions on the windshield 11 (wiping surface) due to changes in vehicle speed.
上述したように本実施形態において、モータ制御装置33は、ブラシレスモータ30の出力が低い低出力モードにおいて、ブラシレスモータ30を3次高調波通電駆動し、低出力モードよりも出力が高い高出力モードにおいて、ブラシレスモータ30を広角台形波通電駆動により通電する。このように、モータ制御装置33は、使用頻度の高い低速作動モードにおいて、3次高調波通電駆動することで、特許文献1記載の矩形波通電制御と比較して、効率良く、且つ作動音を低減することが可能となる(図11参照)。
また、高い特性が必要な高速作動モードにおいては、モータ制御装置33は、広角台形波通電駆動することで、低速作動モードにおける正弦波駆動と比較してよりモータ特性を上げ、高速作動モードで要求されるモータ特性を満足することができる(図9参照)。さらに、特許文献2記載の矩形波通電制御(広角通電駆動)と比較して、効率良く、且つ作動音を低減することが可能となる(図11参照)。 As described above, in the present embodiment, themotor control device 33 drives the brushless motor 30 to energize the third harmonic in the low output mode in which the output of the brushless motor 30 is low, and the output is higher than the low output mode in the high output mode. The brushless motor 30 is energized by a wide-angle trapezoidal wave energization drive. As described above, the motor control device 33 is driven by the third harmonic energization drive in the frequently used low-speed operation mode, so that the operation noise is more efficient than the rectangular wave energization control described in Patent Document 1. It can be reduced (see FIG. 11).
Further, in the high-speed operation mode in which high characteristics are required, themotor control device 33 is driven by wide-angle trapezoidal wave energization to further improve the motor characteristics as compared with the sine wave drive in the low-speed operation mode, and is required in the high-speed operation mode. The motor characteristics to be achieved can be satisfied (see FIG. 9). Further, as compared with the rectangular wave energization control (wide-angle energization drive) described in Patent Document 2, it is possible to efficiently reduce the operating noise (see FIG. 11).
また、高い特性が必要な高速作動モードにおいては、モータ制御装置33は、広角台形波通電駆動することで、低速作動モードにおける正弦波駆動と比較してよりモータ特性を上げ、高速作動モードで要求されるモータ特性を満足することができる(図9参照)。さらに、特許文献2記載の矩形波通電制御(広角通電駆動)と比較して、効率良く、且つ作動音を低減することが可能となる(図11参照)。 As described above, in the present embodiment, the
Further, in the high-speed operation mode in which high characteristics are required, the
上記実施形態においては、ワイパアームを揺動動作させるブラシレスワイパーモータであるブラシレスモータ30と、モータ制御装置33と、を備えるモータユニット19について述べた。以下のようなブラシレスモータおよびモータ制御装置から構成されるモータユニットであってもよい。
(サンルーフモータユニット)
車両のルーフに設けられるルーフパネルを開閉駆動するブラシレスサンルーフモータであるブラシレスモータと、車両停止時(低負荷)と走行時(高負荷)に合わせて、本実施形態における切り替え制御を適用したモータ制御装置とから構成されるサンルーフモータユニット。
(パワーシートモータユニット)
車両シートを駆動するブラシレスパワーシートモータであるブラシレスモータと、シート位置の微調整(座席の位置、角度調整)では第1の通電信号(印加電圧)による通電駆動を行い、シート位置の大幅変更(後部座席への搭乗時、車両衝突時のサブマリン効果防止)等では、第2の通電信号(印加電圧)による通電駆動を行い、両通電の切り替え制御を行うモータ制御装置とから構成されるパワーシートモータユニット。
(ファンモータユニット)
車両のラジエター冷却装置の駆動源として用いられるブラシレスファンモータであるブラシレスモータと、速度可変に対応して、第1の通電信号および第2の通電信号による通電駆動を行い、両通電の切り替え制御を行うモータ制御装置とから構成されるファンモータユニット。
(パワースライドドアモータユニット)
車両のスライドドアを開閉する電動モータとして用いられるブラシレスパワースライドドアモータであるブラシレスモータと、第1の通電信号および第2の通電信号による通電駆動を行い、両通電の切り替え制御を行うモータ制御装置とから構成されるパワースライドドアモータユニット。 In the above embodiment, themotor unit 19 including the brushless motor 30 which is a brushless wiper motor for swinging the wiper arm and the motor control device 33 has been described. It may be a motor unit composed of the following brushless motor and motor control device.
(Sunroof motor unit)
A brushless motor, which is a brushless sunroof motor that opens and closes the roof panel provided on the roof of the vehicle, and a motor control to which the switching control in the present embodiment is applied according to when the vehicle is stopped (low load) and when the vehicle is running (high load). A sunroof motor unit consisting of a device.
(Power seat motor unit)
The brushless motor, which is a brushless power seat motor that drives the vehicle seat, and the fine adjustment of the seat position (seat position, angle adjustment) perform energization drive by the first energization signal (applied voltage), and the seat position is significantly changed (seat position, angle adjustment). When boarding the rear seat or preventing the submarine effect in the event of a vehicle collision), a power seat consisting of a motor control device that performs energization drive by a second energization signal (applied voltage) and controls switching between both energizations. Motor unit.
(Fan motor unit)
A brushless motor, which is a brushless fan motor used as a drive source for a radiator cooling device of a vehicle, and a brushless motor, which corresponds to variable speed, are driven by a first energization signal and a second energization signal to control switching between both energizations. A fan motor unit consisting of a motor control device to perform.
(Power slide door motor unit)
A brushless power slide door motor used as an electric motor for opening and closing the sliding door of a vehicle, and a motor control device that performs energization drive by a first energization signal and a second energization signal and controls switching between both energizations. Power slide door motor unit composed of.
(サンルーフモータユニット)
車両のルーフに設けられるルーフパネルを開閉駆動するブラシレスサンルーフモータであるブラシレスモータと、車両停止時(低負荷)と走行時(高負荷)に合わせて、本実施形態における切り替え制御を適用したモータ制御装置とから構成されるサンルーフモータユニット。
(パワーシートモータユニット)
車両シートを駆動するブラシレスパワーシートモータであるブラシレスモータと、シート位置の微調整(座席の位置、角度調整)では第1の通電信号(印加電圧)による通電駆動を行い、シート位置の大幅変更(後部座席への搭乗時、車両衝突時のサブマリン効果防止)等では、第2の通電信号(印加電圧)による通電駆動を行い、両通電の切り替え制御を行うモータ制御装置とから構成されるパワーシートモータユニット。
(ファンモータユニット)
車両のラジエター冷却装置の駆動源として用いられるブラシレスファンモータであるブラシレスモータと、速度可変に対応して、第1の通電信号および第2の通電信号による通電駆動を行い、両通電の切り替え制御を行うモータ制御装置とから構成されるファンモータユニット。
(パワースライドドアモータユニット)
車両のスライドドアを開閉する電動モータとして用いられるブラシレスパワースライドドアモータであるブラシレスモータと、第1の通電信号および第2の通電信号による通電駆動を行い、両通電の切り替え制御を行うモータ制御装置とから構成されるパワースライドドアモータユニット。 In the above embodiment, the
(Sunroof motor unit)
A brushless motor, which is a brushless sunroof motor that opens and closes the roof panel provided on the roof of the vehicle, and a motor control to which the switching control in the present embodiment is applied according to when the vehicle is stopped (low load) and when the vehicle is running (high load). A sunroof motor unit consisting of a device.
(Power seat motor unit)
The brushless motor, which is a brushless power seat motor that drives the vehicle seat, and the fine adjustment of the seat position (seat position, angle adjustment) perform energization drive by the first energization signal (applied voltage), and the seat position is significantly changed (seat position, angle adjustment). When boarding the rear seat or preventing the submarine effect in the event of a vehicle collision), a power seat consisting of a motor control device that performs energization drive by a second energization signal (applied voltage) and controls switching between both energizations. Motor unit.
(Fan motor unit)
A brushless motor, which is a brushless fan motor used as a drive source for a radiator cooling device of a vehicle, and a brushless motor, which corresponds to variable speed, are driven by a first energization signal and a second energization signal to control switching between both energizations. A fan motor unit consisting of a motor control device to perform.
(Power slide door motor unit)
A brushless power slide door motor used as an electric motor for opening and closing the sliding door of a vehicle, and a motor control device that performs energization drive by a first energization signal and a second energization signal and controls switching between both energizations. Power slide door motor unit composed of.
ここで、上述のモータユニット19をサンルーフユニットに適用した場合における制御部54の処理の流れの変形例について、図16から図20を用いて説明する。ここでは、サンルーフの制御を行うための構成に関する概略構成図の説明は省略するが、図4、図5における「ワイパスイッチ37」を「サンルーフ操作子」に置き換えたものに相当する。サンルーフユニットには、サンルーフと、サンルーフを開閉するサンルーフ操作子とが含まれる。制御部54は、このサンルーフ操作子が操作されたことに応じた操作信号を当該サンルーフ操作子から取得し、取得した操作信号に応じて、サンルーフの開閉を行う。サンルーフ操作子は、例えば、開閉のいずれの動作を行うか指定するスイッチであってもよいし、タッチパネル等の操作パネルであってもよい。
Here, a modified example of the processing flow of the control unit 54 when the above-mentioned motor unit 19 is applied to the sunroof unit will be described with reference to FIGS. 16 to 20. Although the description of the schematic configuration diagram regarding the configuration for controlling the sunroof is omitted here, it corresponds to the one in which the "wiper switch 37" in FIGS. 4 and 5 is replaced with the "sunroof operator". The sunroof unit includes a sunroof and a sunroof operator that opens and closes the sunroof. The control unit 54 acquires an operation signal corresponding to the operation of the sunroof operator from the sunroof operator, and opens and closes the sunroof according to the acquired operation signal. The sunroof operator may be, for example, a switch that specifies which operation of opening / closing is performed, or an operation panel such as a touch panel.
図16は、モータユニット19をサンルーフユニットに適用した場合における制御部54の処理の流れの変形例を説明する図である。
制御部54は、例えば運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS301)。 FIG. 16 is a diagram illustrating a modified example of the processing flow of thecontrol unit 54 when the motor unit 19 is applied to the sunroof unit.
For example, when the sunroof operator is operated by the driver, thecontrol unit 54 acquires an operation signal from the sunroof operator, and the acquired operation signal is an operation signal for performing a tilt-up operation or an operation signal for performing a close operation. Whether or not it is determined (step S301).
制御部54は、例えば運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS301)。 FIG. 16 is a diagram illustrating a modified example of the processing flow of the
For example, when the sunroof operator is operated by the driver, the
制御部54は、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号である場合(ステップS301-YES)、チルトアップ動作またはクローズ動作を、ブラシレスモータ30を広角台形波通電駆動することで実行する(ステップS302)。これにより、操作信号がチルトアップ操作を示す場合には、モータユニット19を広角台形波通電駆動することでチルトアップ動作を行う。また、操作信号がクローズ操作を示す場合には、モータユニット19を広角台形波通電駆動することでクローズ動作を行う。なお、チルトアップ動作は、例えば、サンルーフが上方向に傾いて開く動作であり、クローズ動作は、サンルーフを閉じる動作である。
When the operation signal is an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S301-YES), the control unit 54 drives the brushless motor 30 with a wide-angle trapezoidal wave energization for the tilt-up operation or the close operation. (Step S302). As a result, when the operation signal indicates a tilt-up operation, the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the tilt-up operation. When the operation signal indicates a close operation, the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation. The tilt-up operation is, for example, an operation in which the sunroof is tilted upward to open, and the closing operation is an operation in which the sunroof is closed.
一方、ステップS301において、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号ではない場合(ステップS301-NO)、制御部54は、操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号であるかを判定する(ステップS303)。
操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号である場合(ステップS303-YES)、制御部54は、チルトダウン動作またはオープン動作を、モータユニット19を3次高調波通電駆動することで実行する(ステップS304)。これにより、操作信号がチルトダウン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでチルトダウン動作を行う。また、操作信号がオープン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでオープン動作を行う。チルトダウン操作は、チルトアップされたサンルーフの傾きを元に戻すことでサンルーフを閉じる動作であり、オープン操作は、サンルーフを全開位置まで移動させることで開く動作である。 On the other hand, in step S301, when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S301-NO), thecontrol unit 54 determines that the operation signal is an operation signal for performing a tilt-down operation or open. It is determined whether the operation signal is to be operated (step S303).
When the operation signal is an operation signal for performing a tilt-down operation or an operation signal for performing an open operation (step S303-YES), thecontrol unit 54 performs a tilt-down operation or an open operation to drive the motor unit 19 to a third harmonic energization. (Step S304). As a result, when the operation signal indicates a tilt-down operation, the control unit 54 performs the tilt-down operation by driving the motor unit 19 to energize the third harmonic. When the operation signal indicates an open operation, the control unit 54 performs an open operation by driving the motor unit 19 with a third harmonic energization. The tilt-down operation is an operation of closing the sunroof by returning the tilt of the tilted-up sunroof to its original position, and an open operation is an operation of opening the sunroof by moving it to a fully open position.
操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号である場合(ステップS303-YES)、制御部54は、チルトダウン動作またはオープン動作を、モータユニット19を3次高調波通電駆動することで実行する(ステップS304)。これにより、操作信号がチルトダウン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでチルトダウン動作を行う。また、操作信号がオープン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでオープン動作を行う。チルトダウン操作は、チルトアップされたサンルーフの傾きを元に戻すことでサンルーフを閉じる動作であり、オープン操作は、サンルーフを全開位置まで移動させることで開く動作である。 On the other hand, in step S301, when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S301-NO), the
When the operation signal is an operation signal for performing a tilt-down operation or an operation signal for performing an open operation (step S303-YES), the
一方、ステップS303において、操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号ではない場合(ステップS303-NO)、制御部54は、想定外の操作入力がなされた、故障、緊急停止等のいずれかであると判定し、駆動を停止する(ステップS305)。
このように、制御部54は、チルトアップ動作またはクローズ動作においては、広角台形波通電駆動を行い、チルトダウン動作またはオープン動作である場合には、3次高調波通電駆動を行うようにした。これにより、車両の走行時において、チルトダウン動作やオープン動作を行う場合に比べて、チルトアップ動作やクローズ動作を行う場合には、風圧のため、チルトダウンやサンルーフを閉じる動作がしにくいが、広角台形波通電駆動を行うことで、このような状況であっても、円滑にモータユニット19を動作させることができる。 On the other hand, in step S303, when the operation signal is not the operation signal for tilting down operation or the operation signal for opening operation (step S303-NO), thecontrol unit 54 has made an unexpected operation input, such as failure or emergency. It is determined that the drive is stopped or the like, and the drive is stopped (step S305).
As described above, thecontrol unit 54 performs the wide-angle trapezoidal wave energization drive in the tilt-up operation or the close operation, and performs the third harmonic energization drive in the tilt-down operation or the open operation. As a result, when the vehicle is running, it is difficult to tilt down or close the sunroof due to wind pressure when performing the tilt-up operation or the closing operation, as compared with the case where the tilt-down operation or the opening operation is performed. By performing the wide-angle trapezoidal wave energization drive, the motor unit 19 can be smoothly operated even in such a situation.
このように、制御部54は、チルトアップ動作またはクローズ動作においては、広角台形波通電駆動を行い、チルトダウン動作またはオープン動作である場合には、3次高調波通電駆動を行うようにした。これにより、車両の走行時において、チルトダウン動作やオープン動作を行う場合に比べて、チルトアップ動作やクローズ動作を行う場合には、風圧のため、チルトダウンやサンルーフを閉じる動作がしにくいが、広角台形波通電駆動を行うことで、このような状況であっても、円滑にモータユニット19を動作させることができる。 On the other hand, in step S303, when the operation signal is not the operation signal for tilting down operation or the operation signal for opening operation (step S303-NO), the
As described above, the
図17は、モータユニット19をサンルーフユニットに適用した場合における制御部54の処理の流れの変形例を説明する図である。
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS311)。 FIG. 17 is a diagram illustrating a modified example of the processing flow of thecontrol unit 54 when the motor unit 19 is applied to the sunroof unit.
When the sunroof operator is operated by the driver, thecontrol unit 54 acquires an operation signal from the sunroof operator, and whether the acquired operation signal is an operation signal for tilting up operation or an operation signal for closing operation. It is determined whether or not (step S311).
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS311)。 FIG. 17 is a diagram illustrating a modified example of the processing flow of the
When the sunroof operator is operated by the driver, the
制御部54は、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号である場合(ステップS311-YES)、チルトアップ動作またはクローズ動作を、ブラシレスモータ30を広角台形波通電駆動することで実行する(ステップS312)。これにより、操作信号がチルトアップ操作を示す場合、制御部54は、モータユニット19を広角台形波通電駆動することでチルトアップ動作を行う。また、操作信号がクローズ操作を示す場合には、モータユニット19を広角台形波通電駆動することでクローズ動作を行う。
一方、ステップS311において、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号ではない場合(ステップS311-NO)、制御部54は、操作内容に応じた動作を、モータユニット19を3次高調波通電駆動することで実行する(ステップS314)。ここでは操作内容は、「チルトアップ」、「クローズ」、「チルドダウン」、「オープン」の4種類のみであり、その中のいずれかの操作入力を受け付ける場合には、ステップS311においてNOと判定された場合には、「チルトダウン」、「オープン」のいずれかの動作を実行すればよいことになる。そのため、制御部54は、ステップS311においてNOと判定された場合に行う動作は、3次高調波通電駆動をすることで、チルトダウン動作またはオープン動作を行うことができる。 When the operation signal is an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S311-YES), thecontrol unit 54 drives the brushless motor 30 with a wide-angle trapezoidal wave energization for the tilt-up operation or the close operation. (Step S312). As a result, when the operation signal indicates a tilt-up operation, the control unit 54 performs the tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization. When the operation signal indicates a close operation, the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation.
On the other hand, in step S311 when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S311-NO), thecontrol unit 54 performs an operation according to the operation content to the motor unit 19. This is executed by driving the third harmonic energization (step S314). Here, there are only four types of operation contents, "tilt up", "close", "chilled down", and "open", and when accepting any operation input among them, it is determined as NO in step S311. If this is the case, either "tilt down" or "open" operation may be executed. Therefore, the control unit 54 can perform a tilt-down operation or an open operation by performing a third-order harmonic energization drive when the operation is determined to be NO in step S311.
一方、ステップS311において、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号ではない場合(ステップS311-NO)、制御部54は、操作内容に応じた動作を、モータユニット19を3次高調波通電駆動することで実行する(ステップS314)。ここでは操作内容は、「チルトアップ」、「クローズ」、「チルドダウン」、「オープン」の4種類のみであり、その中のいずれかの操作入力を受け付ける場合には、ステップS311においてNOと判定された場合には、「チルトダウン」、「オープン」のいずれかの動作を実行すればよいことになる。そのため、制御部54は、ステップS311においてNOと判定された場合に行う動作は、3次高調波通電駆動をすることで、チルトダウン動作またはオープン動作を行うことができる。 When the operation signal is an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S311-YES), the
On the other hand, in step S311 when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S311-NO), the
図18は、モータユニット19をサンルーフユニットに適用した場合における制御部54の処理の流れの変形例を説明する図である。
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS321)。 FIG. 18 is a diagram illustrating a modified example of the processing flow of thecontrol unit 54 when the motor unit 19 is applied to the sunroof unit.
When the sunroof operator is operated by the driver, thecontrol unit 54 acquires an operation signal from the sunroof operator, and whether the acquired operation signal is an operation signal for tilting up operation or an operation signal for closing operation. It is determined whether or not (step S321).
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS321)。 FIG. 18 is a diagram illustrating a modified example of the processing flow of the
When the sunroof operator is operated by the driver, the
制御部54は、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号である場合(ステップS321-YES)、車速またはモータユニット19のブラシレスモータ30の負荷を検出し、検出結果に基づいて、高出力モードが必要な状態であるか否かを判定する(ステップS322)。この判定は、例えば、車速が車速基準値を超えているか否か、あるいは、ブラシレスモータ30の負荷が負荷基準値を超えているか否かを判定する。この判定は、どちらか一方のみに基づいて判定してもよい。車速基準値や負荷基準値は、例えば、制御部54の内部または外部の記憶装置に予め記憶しておくようにし、これを参照するようにしてもよい。
When the operation signal is an operation signal for tilting up operation or an operation signal for closing operation (step S321-YES), the control unit 54 detects the vehicle speed or the load of the brushless motor 30 of the motor unit 19, and uses the detection result as a result. Based on this, it is determined whether or not the high output mode is required (step S322). In this determination, for example, it is determined whether or not the vehicle speed exceeds the vehicle speed reference value, or whether or not the load of the brushless motor 30 exceeds the load reference value. This determination may be made based on only one of them. The vehicle speed reference value and the load reference value may be stored in advance in a storage device inside or outside the control unit 54, and may be referred to.
制御部54は、車速が車速基準値を超えている場合、またはブラシレスモータ30の負荷が負荷基準値を超えている場合、高出力モードが必要であると判定し(ステップS322-YES)、チルトアップ動作またはクローズ動作を、ブラシレスモータ30を広角台形波通電駆動することで実行する(ステップS322)。これにより、操作信号がチルトアップ操作を示す場合、制御部54は、モータユニット19を広角台形波通電駆動することでチルトアップ動作を行う。また、操作信号がクローズ操作を示す場合には、モータユニット19を広角台形波通電駆動することでクローズ動作を行う。
The control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S322-YES), and tilts. The up operation or the close operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S322). As a result, when the operation signal indicates a tilt-up operation, the control unit 54 performs the tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization. When the operation signal indicates a close operation, the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation.
一方、制御部54は、車速が車速基準値を超えていない場合、またはブラシレスモータ30の負荷が負荷基準値を超えていない場合、高出力モードが必要ではないと判定し(ステップS322-NO)、チルトアップ動作またはクローズ動作を、ブラシレスモータ30を3次高調波通電駆動することで実行する(ステップS326)。これにより、操作信号がチルトアップ操作を示す場合、制御部54は、モータユニット19を3次高調波通電駆動することでチルトアップ動作を行う。また、操作信号がクローズ操作を示す場合には、モータユニット19を3次高調波通電駆動することでクローズ動作を行う。これにより、チルトアップ動作やクローズ動作であっても、高出力モードである必要がない状況であれば、3次高調波通電駆動にて駆動することができる。
On the other hand, the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S322-NO). , The tilt-up operation or the close operation is executed by driving the brushless motor 30 to energize the third harmonic (step S326). As a result, when the operation signal indicates a tilt-up operation, the control unit 54 performs the tilt-up operation by driving the motor unit 19 to energize the third harmonic. When the operation signal indicates a close operation, the motor unit 19 is driven to energize the third harmonic to perform the close operation. As a result, even in the tilt-up operation and the close operation, if it is not necessary to be in the high output mode, it can be driven by the third harmonic energization drive.
一方、ステップS321において、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号ではない場合(ステップS321-NO)、制御部54は、操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号であるかを判定する(ステップS324)。
操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号である場合(ステップS324-YES)、車速またはモータユニット19のブラシレスモータ30の負荷を検出し、検出結果に基づいて、高出力モードが必要な状態であるか否かを判定する(ステップS325)。 On the other hand, in step S321, when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S321-NO), thecontrol unit 54 determines that the operation signal is an operation signal for performing a tilt-down operation or open. It is determined whether the operation signal is to be operated (step S324).
When the operation signal is an operation signal for tilting down operation or an operation signal for performing open operation (step S324-YES), the vehicle speed or the load of thebrushless motor 30 of the motor unit 19 is detected, and a high output is obtained based on the detection result. It is determined whether or not the mode is in a required state (step S325).
操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号である場合(ステップS324-YES)、車速またはモータユニット19のブラシレスモータ30の負荷を検出し、検出結果に基づいて、高出力モードが必要な状態であるか否かを判定する(ステップS325)。 On the other hand, in step S321, when the operation signal is not an operation signal for performing a tilt-up operation or an operation signal for performing a close operation (step S321-NO), the
When the operation signal is an operation signal for tilting down operation or an operation signal for performing open operation (step S324-YES), the vehicle speed or the load of the
制御部54は、車速が車速基準値を超えている場合、またはブラシレスモータ30の負荷が負荷基準値を超えている場合、高出力モードが必要であると判定し(ステップS325-YES)、チルトダウン動作またはオープン動作を、ブラシレスモータ30を広角台形波通電駆動することで実行する(ステップS323)。これにより、操作信号がチルトダウン操作を示す場合、制御部54は、モータユニット19を広角台形波通電駆動することでチルトダウン動作を行う。また、操作信号がオープン操作を示す場合には、モータユニット19を広角台形波通電駆動することでオープン動作を行う。
The control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S325-YES), and tilts. The down operation or the open operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S323). As a result, when the operation signal indicates a tilt-down operation, the control unit 54 performs the tilt-down operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization. When the operation signal indicates an open operation, the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the open operation.
一方、制御部54は、車速が車速基準値を超えていない場合、またはブラシレスモータ30の負荷が負荷基準値を超えていない場合、高出力モードが必要ではないと判定し(ステップS325-NO)、制御部54は、チルトダウン動作またはオープン動作を、モータユニット19を3次高調波通電駆動することで実行する(ステップS326)。これにより、操作信号がチルトダウン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでチルトダウン動作を行う。また、操作信号がオープン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでオープン動作を行う。
On the other hand, the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S325-NO). , The control unit 54 executes the tilt-down operation or the open operation by driving the motor unit 19 to energize the third harmonic (step S326). As a result, when the operation signal indicates a tilt-down operation, the control unit 54 performs the tilt-down operation by driving the motor unit 19 to energize the third harmonic. When the operation signal indicates an open operation, the control unit 54 performs an open operation by driving the motor unit 19 with a third harmonic energization.
一方、ステップS324において、操作信号がチルトダウン操作をする操作信号またはオープン操作をする操作信号ではない場合(ステップS324-NO)、制御部54は、想定外の操作入力がなされた、故障、緊急停止等のいずれかであると判定し、駆動を停止する(ステップS325)。
このように、制御部54は、チルトアップ動作またはクローズ動作を行う場合であっても、高出力モードが必要でなければ、3次高調波通電駆動にてモータユニット19を駆動することができる。また、制御部54は、チルトダウン動作またはオープン動作であっても、高出力モードが必要であれば、広角台形波通電駆動を行うことができる。 On the other hand, in step S324, when the operation signal is not an operation signal for performing a tilt-down operation or an operation signal for performing an open operation (step S324-NO), thecontrol unit 54 has made an unexpected operation input, such as a failure or an emergency. It is determined that the drive is stopped or the like, and the drive is stopped (step S325).
As described above, thecontrol unit 54 can drive the motor unit 19 by the third harmonic energization drive if the high output mode is not required even when the tilt-up operation or the close operation is performed. Further, the control unit 54 can perform wide-angle trapezoidal wave energization drive if a high output mode is required even in the tilt-down operation or the open operation.
このように、制御部54は、チルトアップ動作またはクローズ動作を行う場合であっても、高出力モードが必要でなければ、3次高調波通電駆動にてモータユニット19を駆動することができる。また、制御部54は、チルトダウン動作またはオープン動作であっても、高出力モードが必要であれば、広角台形波通電駆動を行うことができる。 On the other hand, in step S324, when the operation signal is not an operation signal for performing a tilt-down operation or an operation signal for performing an open operation (step S324-NO), the
As described above, the
図19は、モータユニット19をサンルーフユニットに適用した場合における制御部54の処理の流れの変形例を説明する図である。
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS331)。 FIG. 19 is a diagram illustrating a modified example of the processing flow of thecontrol unit 54 when the motor unit 19 is applied to the sunroof unit.
When the sunroof operator is operated by the driver, thecontrol unit 54 acquires an operation signal from the sunroof operator, and whether the acquired operation signal is an operation signal for tilting up operation or an operation signal for closing operation. It is determined whether or not (step S331).
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、取得した操作信号が、チルトアップ操作をする操作信号またはクローズ操作をする操作信号であるか否かを判定する(ステップS331)。 FIG. 19 is a diagram illustrating a modified example of the processing flow of the
When the sunroof operator is operated by the driver, the
制御部54は、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号である場合(ステップS331-YES)、車速またはモータユニット19のブラシレスモータ30の負荷を検出し、検出結果に基づいて、高出力モードが必要な状態であるか否かを判定する(ステップS332)。この判定は、例えば、車速が車速基準値を超えているか否か、あるいは、ブラシレスモータ30の負荷が負荷基準値を超えているか否かを判定する。この判定は、どちらか一方のみに基づいて判定してもよい。車速基準値や負荷基準値は、例えば、制御部54の内部または外部の記憶装置に予め記憶しておくようにし、これを参照するようにしてもよい。
When the operation signal is an operation signal for tilting up operation or an operation signal for closing operation (step S331-YES), the control unit 54 detects the vehicle speed or the load of the brushless motor 30 of the motor unit 19, and uses the detection result as a result. Based on this, it is determined whether or not the high output mode is required (step S332). In this determination, for example, it is determined whether or not the vehicle speed exceeds the vehicle speed reference value, or whether or not the load of the brushless motor 30 exceeds the load reference value. This determination may be made based on only one of them. The vehicle speed reference value and the load reference value may be stored in advance in a storage device inside or outside the control unit 54, and may be referred to.
制御部54は、車速が車速基準値を超えている場合、またはブラシレスモータ30の負荷が負荷基準値を超えている場合、高出力モードが必要であると判定し(ステップS332-YES)、チルトアップ動作またはクローズ動作を、ブラシレスモータ30を広角台形波通電駆動することで実行する(ステップS333)。これにより、操作信号がチルトアップ操作を示す場合、制御部54は、モータユニット19を広角台形波通電駆動することでチルトアップ動作を行う。また、操作信号がクローズ操作を示す場合には、モータユニット19を広角台形波通電駆動することでクローズ動作を行う。
The control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S332-YES), and tilts. The up operation or the close operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S333). As a result, when the operation signal indicates a tilt-up operation, the control unit 54 performs the tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization. When the operation signal indicates a close operation, the motor unit 19 is driven by a wide-angle trapezoidal wave energization to perform the close operation.
一方、制御部54は、車速が車速基準値を超えていない場合、またはブラシレスモータ30の負荷が負荷基準値を超えていない場合、高出力モードが必要ではないと判定し(ステップS332-NO)、チルトアップ動作またはクローズ動作を、ブラシレスモータ30を3次高調波通電駆動することで実行する(ステップS335)。これにより、操作信号がチルトアップ操作を示す場合、制御部54は、モータユニット19を3次高調波通電駆動することでチルトアップ動作を行う。また、操作信号がクローズ操作を示す場合には、モータユニット19を3次高調波通電駆動することでクローズ動作を行う。これにより、チルトアップ動作やクローズ動作であっても、高出力モードである必要がない状況であれば、3次高調波通電駆動にて駆動することができる。
On the other hand, the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S332-NO). , The tilt-up operation or the close operation is executed by driving the brushless motor 30 to energize the third harmonic (step S335). As a result, when the operation signal indicates a tilt-up operation, the control unit 54 performs the tilt-up operation by driving the motor unit 19 to energize the third harmonic. When the operation signal indicates a close operation, the motor unit 19 is driven to energize the third harmonic to perform the close operation. As a result, even in the tilt-up operation and the close operation, if it is not necessary to be in the high output mode, it can be driven by the third harmonic energization drive.
一方、ステップS331において、操作信号がチルトアップ操作をする操作信号またはクローズ操作をする操作信号ではない場合(ステップS331-NO)、制御部54は、車速またはモータユニット19のブラシレスモータ30の負荷を検出し、検出結果に基づいて、高出力モードが必要な状態であるか否かを判定する(ステップS334)。制御部54は、車速が車速基準値を超えている場合、またはブラシレスモータ30の負荷が負荷基準値を超えている場合、高出力モードが必要であると判定し(ステップS334-YES)、チルトダウン動作またはオープン動作を、ブラシレスモータ30を広角台形波通電駆動することで実行する(ステップS333)。これにより、操作信号がチルトダウン操作を示す場合、制御部54は、モータユニット19を広角台形波通電駆動することでチルトダウン動作を行う。また、操作信号がオープン操作を示す場合、制御部54は、モータユニット19を広角台形波通電駆動することでオープン動作を行う。
On the other hand, in step S331, when the operation signal is not an operation signal for tilting up operation or an operation signal for closing operation (step S331-NO), the control unit 54 applies the vehicle speed or the load of the brushless motor 30 of the motor unit 19. It is detected, and based on the detection result, it is determined whether or not the high output mode is required (step S334). The control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S334-YES), and tilts. The down operation or the open operation is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S333). As a result, when the operation signal indicates a tilt-down operation, the control unit 54 performs the tilt-down operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization. When the operation signal indicates an open operation, the control unit 54 performs an open operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization.
一方、制御部54は、車速が車速基準値を超えていない場合、またはブラシレスモータ30の負荷が負荷基準値を超えていない場合、高出力モードが必要ではないと判定し(ステップS334-NO)、制御部54は、チルトダウン動作またはオープン動作を、モータユニット19を3次高調波通電駆動することで実行する(ステップS326)。これにより、操作信号がチルトダウン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでチルトダウン動作を行う。また、操作信号がオープン操作を示す場合には、制御部54は、モータユニット19を3次高調波通電駆動することでオープン動作を行う。
この変形例によれば、制御部54は、ステップS331においてNOと判定された場合には、図18のステップS324に示すチルトダウン操作またはオープン操作のいずれであるか判定ステップを行う必要がない。 On the other hand, thecontrol unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S334-NO). , The control unit 54 executes the tilt-down operation or the open operation by driving the motor unit 19 to energize the third harmonic (step S326). As a result, when the operation signal indicates a tilt-down operation, the control unit 54 performs the tilt-down operation by driving the motor unit 19 to energize the third harmonic. When the operation signal indicates an open operation, the control unit 54 performs an open operation by driving the motor unit 19 with a third harmonic energization.
According to this modification, when thecontrol unit 54 determines NO in step S331, it is not necessary to perform the determination step as to whether it is the tilt-down operation or the open operation shown in step S324 of FIG.
この変形例によれば、制御部54は、ステップS331においてNOと判定された場合には、図18のステップS324に示すチルトダウン操作またはオープン操作のいずれであるか判定ステップを行う必要がない。 On the other hand, the
According to this modification, when the
図20は、モータユニット19をサンルーフユニットに適用した場合における制御部54の処理の流れの変形例を説明する図である。
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、車速またはモータユニット19のブラシレスモータ30の負荷を検出し、検出結果に基づいて、高出力モードが必要な状態であるか否かを判定する(ステップS341)。この判定は、例えば、車速が車速基準値を超えているか否か、あるいは、ブラシレスモータ30の負荷が負荷基準値を超えているか否かを判定する。この判定は、どちらか一方のみに基づいて判定してもよい。車速基準値や負荷基準値は、例えば、制御部54の内部または外部の記憶装置に予め記憶しておくようにし、これを参照するようにしてもよい。 FIG. 20 is a diagram illustrating a modified example of the processing flow of thecontrol unit 54 when the motor unit 19 is applied to the sunroof unit.
When the sunroof operator is operated by the driver, thecontrol unit 54 acquires an operation signal from the sunroof operator, detects the vehicle speed or the load of the brushless motor 30 of the motor unit 19, and outputs a high output based on the detection result. It is determined whether or not the mode is in a required state (step S341). In this determination, for example, it is determined whether or not the vehicle speed exceeds the vehicle speed reference value, or whether or not the load of the brushless motor 30 exceeds the load reference value. This determination may be made based on only one of them. The vehicle speed reference value and the load reference value may be stored in advance in a storage device inside or outside the control unit 54, and may be referred to.
制御部54は、運転者によってサンルーフ操作子が操作されると、サンルーフ操作子から操作信号を取得し、車速またはモータユニット19のブラシレスモータ30の負荷を検出し、検出結果に基づいて、高出力モードが必要な状態であるか否かを判定する(ステップS341)。この判定は、例えば、車速が車速基準値を超えているか否か、あるいは、ブラシレスモータ30の負荷が負荷基準値を超えているか否かを判定する。この判定は、どちらか一方のみに基づいて判定してもよい。車速基準値や負荷基準値は、例えば、制御部54の内部または外部の記憶装置に予め記憶しておくようにし、これを参照するようにしてもよい。 FIG. 20 is a diagram illustrating a modified example of the processing flow of the
When the sunroof operator is operated by the driver, the
制御部54は、車速が車速基準値を超えている場合、またはブラシレスモータ30の負荷が負荷基準値を超えている場合、高出力モードが必要であると判定し(ステップS341-YES)、操作信号に応じた動作を、ブラシレスモータ30を広角台形波通電駆動することで実行する(ステップS342)。これにより、操作信号がチルトアップ操作を示す場合、制御部54は、モータユニット19を広角台形波通電駆動することでチルトアップ動作を行い、操作信号がクローズ操作を示す場合には、モータユニット19を広角台形波通電駆動することでクローズ動作を行う。また、制御部54は、操作信号が、チルトダウン操作を示す場合、モータユニット19を広角台形波通電駆動することでチルトダウン動作を行い、操作信号がオープン操作を示す場合には、モータユニット19を広角台形波通電駆動することでオープン動作を行う。
The control unit 54 determines that the high output mode is necessary when the vehicle speed exceeds the vehicle speed reference value, or when the load of the brushless motor 30 exceeds the load reference value (step S341-YES), and operates. The operation corresponding to the signal is executed by driving the brushless motor 30 with a wide-angle trapezoidal wave energization (step S342). As a result, when the operation signal indicates a tilt-up operation, the control unit 54 performs a tilt-up operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization, and when the operation signal indicates a close operation, the motor unit 19 Is driven by a wide-angle trapezoidal wave energization to perform a closing operation. Further, when the operation signal indicates a tilt-down operation, the control unit 54 performs a tilt-down operation by driving the motor unit 19 with a wide-angle trapezoidal wave energization, and when the operation signal indicates an open operation, the motor unit 19 Is driven by a wide-angle trapezoidal wave energization to perform open operation.
一方、制御部54は、車速が車速基準値を超えていない場合、またはブラシレスモータ30の負荷が負荷基準値を超えていない場合、高出力モードが必要ではないと判定し(ステップS341-NO)、操作信号に応じた動作を、ブラシレスモータ30を3次高調波通電駆動することで実行する(ステップS343)。これにより、操作信号がチルトアップ操作を示す場合、制御部54は、モータユニット19を3次高調波通電駆動することでチルトアップ動作を行い、操作信号がクローズ操作を示す場合には、モータユニット19を3次高調波通電駆動することでクローズ動作を行う。また、制御部54は、操作信号が、チルトダウン操作を示す場合、モータユニット19を3次高調波通電駆動することでチルトダウン動作を行い、操作信号がオープン操作を示す場合には、モータユニット19を3次高調波通電駆動することでオープン動作を行う。
On the other hand, the control unit 54 determines that the high output mode is not necessary when the vehicle speed does not exceed the vehicle speed reference value or when the load of the brushless motor 30 does not exceed the load reference value (step S341-NO). , The operation according to the operation signal is executed by driving the brushless motor 30 to energize the third harmonic (step S343). As a result, when the operation signal indicates a tilt-up operation, the control unit 54 performs a tilt-up operation by driving the motor unit 19 by energizing the third harmonic, and when the operation signal indicates a close operation, the motor unit The closing operation is performed by driving 19 with a third harmonic energization. Further, when the operation signal indicates a tilt-down operation, the control unit 54 performs a tilt-down operation by driving the motor unit 19 to energize the third harmonic, and when the operation signal indicates an open operation, the motor unit 54 performs a tilt-down operation. The open operation is performed by driving 19 with a third harmonic energization.
この変形例によれば、制御部54は、運転者によってサンルーフ操作子が操作された操作内容の種別ではなく、高出力モードが必要であるか否かの判定結果に基づいて、広角台形波通電駆動を行うか、3次高調波通電駆動を行うかを決めることができる。その上で、サンルーフを操作内容に応じて制御することができる。
According to this modification, the control unit 54 energizes the wide-angle trapezoidal wave based on the determination result of whether or not the high output mode is required, not the type of the operation content in which the sunroof operator is operated by the driver. It is possible to decide whether to perform the drive or the third harmonic energization drive. On top of that, the sunroof can be controlled according to the operation content.
図21A~図21Cは、モータユニット19の動作を実験した結果を示す図である。
図21Aから図21Cの横軸に示す0°~360°の角度は、第2通電信号の1周期内における通電期間を表す電気角である。また、縦軸に示すFET_Duty[%]は、各相へ印加する印加電圧を表す。
図21Aは、本実施形態における第2駆動制御部642によるU、V、W各相の通電タイミングを示すタイミングチャートである。
図21Aでは、第2通電信号の波形を表しており、正弦波に3次高調波が重畳された3相の各相の印加電圧であって、FET_Duty[%]が100%以上となる通電区間(以下、100%通電角という)(符号215)が110°となるように広角台形波通電駆動した場合の波形が示されている。ここでは、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約90%(符号210)である。
ここで、図6に示すように、第1通電信号において、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約80%(符号600)である。よって、印加電圧のデューティが同じになるときのデューティの値は、第1通電信号(第1の制御モード)よりも第2通電信号(第2の制御モード)の方が大きい。 21A to 21C are diagrams showing the results of experiments on the operation of themotor unit 19.
The angles from 0 ° to 360 ° shown on the horizontal axis of FIGS. 21A to 21C are electric angles representing the energization period within one cycle of the second energization signal. Further, FET_Duty [%] shown on the vertical axis represents the applied voltage applied to each phase.
FIG. 21A is a timing chart showing the energization timings of the U, V, and W phases by the seconddrive control unit 642 in the present embodiment.
FIG. 21A shows the waveform of the second energization signal, which is the applied voltage of each of the three phases in which the third harmonic is superimposed on the sine wave, and the energization section in which FET_Duty [%] is 100% or more. The waveform when the wide-angle trapezoidal wave is energized so that (hereinafter referred to as 100% energization angle) (reference numeral 215) is 110 ° is shown. Here, the applied voltage is applied to any two of the three phases of U phase, V phase, and W phase (at least one of V phase and W phase, W phase and U phase, and U phase and V phase). The duty value when the duty is the same is about 90% (reference numeral 210).
Here, as shown in FIG. 6, in the first energization signal, any two phases (V phase and W phase, W phase and U phase, U phase) of the three phases of U phase, V phase, and W phase are used. And at least one of the V phases), the duty value when the duty of the applied voltage becomes the same is about 80% (reference numeral 600). Therefore, the duty value when the duty of the applied voltage becomes the same is larger in the second energization signal (second control mode) than in the first energization signal (first control mode).
図21Aから図21Cの横軸に示す0°~360°の角度は、第2通電信号の1周期内における通電期間を表す電気角である。また、縦軸に示すFET_Duty[%]は、各相へ印加する印加電圧を表す。
図21Aは、本実施形態における第2駆動制御部642によるU、V、W各相の通電タイミングを示すタイミングチャートである。
図21Aでは、第2通電信号の波形を表しており、正弦波に3次高調波が重畳された3相の各相の印加電圧であって、FET_Duty[%]が100%以上となる通電区間(以下、100%通電角という)(符号215)が110°となるように広角台形波通電駆動した場合の波形が示されている。ここでは、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約90%(符号210)である。
ここで、図6に示すように、第1通電信号において、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約80%(符号600)である。よって、印加電圧のデューティが同じになるときのデューティの値は、第1通電信号(第1の制御モード)よりも第2通電信号(第2の制御モード)の方が大きい。 21A to 21C are diagrams showing the results of experiments on the operation of the
The angles from 0 ° to 360 ° shown on the horizontal axis of FIGS. 21A to 21C are electric angles representing the energization period within one cycle of the second energization signal. Further, FET_Duty [%] shown on the vertical axis represents the applied voltage applied to each phase.
FIG. 21A is a timing chart showing the energization timings of the U, V, and W phases by the second
FIG. 21A shows the waveform of the second energization signal, which is the applied voltage of each of the three phases in which the third harmonic is superimposed on the sine wave, and the energization section in which FET_Duty [%] is 100% or more. The waveform when the wide-angle trapezoidal wave is energized so that (hereinafter referred to as 100% energization angle) (reference numeral 215) is 110 ° is shown. Here, the applied voltage is applied to any two of the three phases of U phase, V phase, and W phase (at least one of V phase and W phase, W phase and U phase, and U phase and V phase). The duty value when the duty is the same is about 90% (reference numeral 210).
Here, as shown in FIG. 6, in the first energization signal, any two phases (V phase and W phase, W phase and U phase, U phase) of the three phases of U phase, V phase, and W phase are used. And at least one of the V phases), the duty value when the duty of the applied voltage becomes the same is about 80% (reference numeral 600). Therefore, the duty value when the duty of the applied voltage becomes the same is larger in the second energization signal (second control mode) than in the first energization signal (first control mode).
図21Bは、本実施形態における第2駆動制御部642によるU、V、W各相の通電タイミングを示すタイミングチャートである。
ここで、図21Bでは、第2通電信号の波形を表しており、100%通電角(符号216)が130°となるように広角台形波通電駆動した場合の波形が示されている。また、ここでは、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約100%(符号211)である。
そのため、図6に示す第1通電信号(第1の制御モード)では、3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、約80%であるのに対して、第2通電信号(第2の制御モード)では、3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、約100%である。よって、印加電圧のデューティが同じになるときのデューティの値は、第1通電信号(第1の制御モード)よりも第2通電信号(第2の制御モード)の方が大きい。 FIG. 21B is a timing chart showing the energization timings of the U, V, and W phases by the seconddrive control unit 642 in the present embodiment.
Here, FIG. 21B shows the waveform of the second energization signal, and shows the waveform when the wide-angle trapezoidal wave energization drive is performed so that the 100% energization angle (reference numeral 216) is 130 °. Further, here, the application is applied to any two of the three phases of the U phase, the V phase, and the W phase (at least one of the V phase and the W phase, the W phase and the U phase, and the U phase and the V phase). The duty value when the voltage duty is the same is about 100% (reference numeral 211).
Therefore, in the first energization signal (first control mode) shown in FIG. 6, the duty value when the duty of the applied voltage is the same for any two of the three phases is about 80%. On the other hand, in the second energization signal (second control mode), the duty value when the duty of the applied voltage is the same for any two of the three phases is about 100%. Therefore, the duty value when the duty of the applied voltage becomes the same is larger in the second energization signal (second control mode) than in the first energization signal (first control mode).
ここで、図21Bでは、第2通電信号の波形を表しており、100%通電角(符号216)が130°となるように広角台形波通電駆動した場合の波形が示されている。また、ここでは、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約100%(符号211)である。
そのため、図6に示す第1通電信号(第1の制御モード)では、3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、約80%であるのに対して、第2通電信号(第2の制御モード)では、3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、約100%である。よって、印加電圧のデューティが同じになるときのデューティの値は、第1通電信号(第1の制御モード)よりも第2通電信号(第2の制御モード)の方が大きい。 FIG. 21B is a timing chart showing the energization timings of the U, V, and W phases by the second
Here, FIG. 21B shows the waveform of the second energization signal, and shows the waveform when the wide-angle trapezoidal wave energization drive is performed so that the 100% energization angle (reference numeral 216) is 130 °. Further, here, the application is applied to any two of the three phases of the U phase, the V phase, and the W phase (at least one of the V phase and the W phase, the W phase and the U phase, and the U phase and the V phase). The duty value when the voltage duty is the same is about 100% (reference numeral 211).
Therefore, in the first energization signal (first control mode) shown in FIG. 6, the duty value when the duty of the applied voltage is the same for any two of the three phases is about 80%. On the other hand, in the second energization signal (second control mode), the duty value when the duty of the applied voltage is the same for any two of the three phases is about 100%. Therefore, the duty value when the duty of the applied voltage becomes the same is larger in the second energization signal (second control mode) than in the first energization signal (first control mode).
図21Cは、本実施形態における第2駆動制御部642によるU、V、W各相の通電タイミングを示すタイミングチャートである。
ここで、図21Cでは、第2通電信号の波形を表しており、100%通電角(符号217)が155°となるように広角台形波通電駆動した場合の波形が示されている。第2通電信号は、オーバラップ通電区間を有する。また、ここでは、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約120%(符号212)であり、オーバラップ通電区間において、2つの相の見かけ上のFET_Duty[%]が共に100%になっている。 FIG. 21C is a timing chart showing the energization timings of the U, V, and W phases by the seconddrive control unit 642 in the present embodiment.
Here, FIG. 21C shows the waveform of the second energization signal, and shows the waveform when the wide-angle trapezoidal wave energization drive is performed so that the 100% energization angle (reference numeral 217) is 155 °. The second energization signal has an overlap energization section. Further, here, the application is applied to any two of the three phases of the U phase, the V phase, and the W phase (at least one of the V phase and the W phase, the W phase and the U phase, and the U phase and the V phase). The duty value when the voltage duty becomes the same is about 120% (reference numeral 212), and the apparent FET_Duty [%] of the two phases are both 100% in the overlap energization section.
ここで、図21Cでは、第2通電信号の波形を表しており、100%通電角(符号217)が155°となるように広角台形波通電駆動した場合の波形が示されている。第2通電信号は、オーバラップ通電区間を有する。また、ここでは、U相、V相、W相の3相のうち、いずれか2つの相(V相とW相、W相とU相、U相とV相の少なくともいずれか)について、印加電圧のデューティが同じになるときのデューティ値は、約120%(符号212)であり、オーバラップ通電区間において、2つの相の見かけ上のFET_Duty[%]が共に100%になっている。 FIG. 21C is a timing chart showing the energization timings of the U, V, and W phases by the second
Here, FIG. 21C shows the waveform of the second energization signal, and shows the waveform when the wide-angle trapezoidal wave energization drive is performed so that the 100% energization angle (reference numeral 217) is 155 °. The second energization signal has an overlap energization section. Further, here, the application is applied to any two of the three phases of the U phase, the V phase, and the W phase (at least one of the V phase and the W phase, the W phase and the U phase, and the U phase and the V phase). The duty value when the voltage duty becomes the same is about 120% (reference numeral 212), and the apparent FET_Duty [%] of the two phases are both 100% in the overlap energization section.
図21Cにおいても、図6に示す第1通電信号(第1の制御モード)では、3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、約80%であるのに対して、第2通電信号(第2の制御モード)では、3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、約120%である。よって、印加電圧のデューティが同じになるときのデューティの値は、通電角を155°まで拡大した場合であっても、第1通電信号(第1の制御モード)よりも第2通電信号(第2の制御モード)の方が大きい。
Also in FIG. 21C, in the first energization signal (first control mode) shown in FIG. 6, the duty value when the applied voltage duty is the same for any two of the three phases is about 80. In contrast, in the second energization signal (second control mode), the duty value when the duty of the applied voltage is the same for any two of the three phases is about 120%. Is. Therefore, the duty value when the duty of the applied voltage becomes the same is the second energization signal (first energization signal) rather than the first energization signal (first control mode) even when the energization angle is expanded to 155 °. 2 control mode) is larger.
また、制御部54は、第2通電信号について、100%通電角を110°~155°の範囲で制御した場合には、消費電流とモータ出力とについて、目標とするバランスとなるように駆動させることが可能となる。例えば、消費電流とモータ出力とのうち、消費電流を優先して制御する場合には、100%通電角を110°から155°の範囲のうち、110°により近い値にすればよく、110°にした場合には、消費電流をより低減することができる。一方、消費電流とモータ出力とのうち、モータ出力を向上させることを優先して制御する場合には、100%通電角を110°から155°の範囲のうち、155°により近い値にすればよく、155°にした場合には、モータ出力をより向上させることができる。
Further, the control unit 54 drives the second energization signal so that the current consumption and the motor output have a target balance when the 100% energization angle is controlled in the range of 110 ° to 155 °. It becomes possible. For example, when the current consumption is preferentially controlled among the current consumption and the motor output, the 100% energization angle may be set to a value closer to 110 ° in the range of 110 ° to 155 °, and 110 °. When set to, the current consumption can be further reduced. On the other hand, when controlling the current consumption and the motor output with priority given to improving the motor output, the 100% energization angle may be set to a value closer to 155 ° in the range of 110 ° to 155 °. Well, when it is set to 155 °, the motor output can be further improved.
図22は、第2通電信号における、消費電流と100%通電角の関係を示す図である。この図において、縦軸が消費電流を表し、横軸が100%通電角を示す。ここでは、符号220に示すように、100%通電角を110°にした場合に、消費電流が最も小さくなることが確認できた。
図23は、第2通電信号において100%通電角を155°にした場合における、モータの回転数と100%通電角の関係を示す図である。この図において、縦軸がモータの回転数を表し、横軸が100%通電角を示す。ここでは、符号230に示すように、100%通電角を155°にした場合に、モータの回転数が最も大きくなる、すなわちモータ出力が最も大きくなることが確認できた。
100%通電角を110°から大きくしていくと、155°に近づくにつれてモータの回転数が上がっていき、155°の時に回転数が最も大きくなり、155°を超えると回転数が下がる。これは、100%通電角を大きくしていくことで、第1通電信号に対して進角する波が増えるが、155°を超えると、進角する波の影響よりも、遅角する波の影響が大きくなるためである。よって、遅角する波がひきずりトルク(ロータを逆方向に回そうとする力)を引き起こすため、回転数がピーク値よりも低下する。 FIG. 22 is a diagram showing the relationship between the current consumption and the 100% energization angle in the second energization signal. In this figure, the vertical axis represents the current consumption and the horizontal axis represents the 100% energization angle. Here, as shown byreference numeral 220, it was confirmed that the current consumption was the smallest when the 100% energization angle was set to 110 °.
FIG. 23 is a diagram showing the relationship between the rotation speed of the motor and the 100% energization angle when the 100% energization angle is set to 155 ° in the second energization signal. In this figure, the vertical axis represents the rotation speed of the motor, and the horizontal axis represents the 100% energization angle. Here, as shown byreference numeral 230, it was confirmed that the rotation speed of the motor became the largest, that is, the motor output became the largest when the 100% energization angle was set to 155 °.
When the 100% energization angle is increased from 110 °, the rotation speed of the motor increases as it approaches 155 °, the rotation speed becomes the largest at 155 °, and the rotation speed decreases when it exceeds 155 °. This is because by increasing the energization angle by 100%, the number of waves advancing with respect to the first energization signal increases, but when it exceeds 155 °, the wave that retards more than the effect of the advancing wave. This is because the impact will be large. Therefore, the retarding wave causes a drag torque (a force that tries to rotate the rotor in the opposite direction), so that the rotation speed is lower than the peak value.
図23は、第2通電信号において100%通電角を155°にした場合における、モータの回転数と100%通電角の関係を示す図である。この図において、縦軸がモータの回転数を表し、横軸が100%通電角を示す。ここでは、符号230に示すように、100%通電角を155°にした場合に、モータの回転数が最も大きくなる、すなわちモータ出力が最も大きくなることが確認できた。
100%通電角を110°から大きくしていくと、155°に近づくにつれてモータの回転数が上がっていき、155°の時に回転数が最も大きくなり、155°を超えると回転数が下がる。これは、100%通電角を大きくしていくことで、第1通電信号に対して進角する波が増えるが、155°を超えると、進角する波の影響よりも、遅角する波の影響が大きくなるためである。よって、遅角する波がひきずりトルク(ロータを逆方向に回そうとする力)を引き起こすため、回転数がピーク値よりも低下する。 FIG. 22 is a diagram showing the relationship between the current consumption and the 100% energization angle in the second energization signal. In this figure, the vertical axis represents the current consumption and the horizontal axis represents the 100% energization angle. Here, as shown by
FIG. 23 is a diagram showing the relationship between the rotation speed of the motor and the 100% energization angle when the 100% energization angle is set to 155 ° in the second energization signal. In this figure, the vertical axis represents the rotation speed of the motor, and the horizontal axis represents the 100% energization angle. Here, as shown by
When the 100% energization angle is increased from 110 °, the rotation speed of the motor increases as it approaches 155 °, the rotation speed becomes the largest at 155 °, and the rotation speed decreases when it exceeds 155 °. This is because by increasing the energization angle by 100%, the number of waves advancing with respect to the first energization signal increases, but when it exceeds 155 °, the wave that retards more than the effect of the advancing wave. This is because the impact will be large. Therefore, the retarding wave causes a drag torque (a force that tries to rotate the rotor in the opposite direction), so that the rotation speed is lower than the peak value.
また、上述の実施形態において、モータ制御装置33は、回転角検出部39から供給されるパルス信号に基づいて、ロータ22の回転位置を決定したが、これに限定されない。例えば、モータ制御装置33は、ロータ22の回転に応じて各電機子コイル21u,21v,21wに発生する誘起電圧に基づいて、ロータ22の回転位置を決定してもよい。これにより、ロータ22の回転位置を検出する回転角検出部39が不要となるため、ブラシレスモータ30の部品点数及び製造コストを低減することができる。
Further, in the above-described embodiment, the motor control device 33 determines the rotation position of the rotor 22 based on the pulse signal supplied from the rotation angle detection unit 39, but the present invention is not limited to this. For example, the motor control device 33 may determine the rotation position of the rotor 22 based on the induced voltage generated in each armature coil 21u, 21v, 21w according to the rotation of the rotor 22. This eliminates the need for the rotation angle detection unit 39 that detects the rotation position of the rotor 22, so that the number of parts and the manufacturing cost of the brushless motor 30 can be reduced.
また、上述の実施形態において、ワイパ装置12は、出力軸26の回転数又は絶対位置の少なくとも一方を検出する出力軸センサを備えてもよい。絶対位置とは、基準位置に対する出力軸26の回転角度である。基準位置は、360度の範囲内のうち、任意の位置に定めればよい。モータ制御装置33は、この出力軸センサからの検出信号に基づいてロータ22の回転位置を決定してもよい。
Further, in the above-described embodiment, the wiper device 12 may include an output shaft sensor that detects at least one of the rotation speed and the absolute position of the output shaft 26. The absolute position is the rotation angle of the output shaft 26 with respect to the reference position. The reference position may be set at any position within the range of 360 degrees. The motor control device 33 may determine the rotation position of the rotor 22 based on the detection signal from the output shaft sensor.
また、上述の実施形態において、ワイパ装置12は、車両10のフロントガラス11に限らずリヤガラスを払拭するものであってもよい。また、ワイパ装置12は、出力軸26を支点としてワイパアーム14,16が揺動する構造でもよい。
Further, in the above-described embodiment, the wiper device 12 is not limited to the windshield 11 of the vehicle 10, and may wipe the rear glass. Further, the wiper device 12 may have a structure in which the wiper arms 14 and 16 swing around the output shaft 26 as a fulcrum.
また、上述の実施形態において、ワイパ装置12は、2本のワイパアーム14,16を、それぞれ異なるブラシレスモータにより駆動する構成であってもよい。また、本実施形態のブラシレスモータ30は、IPM(Interior Permanent Magnet)構造のモータであってもよいし、SPM(Surface Permanent Magnet)構造のモータであってもよい。
Further, in the above-described embodiment, the wiper device 12 may be configured to drive the two wiper arms 14 and 16 by different brushless motors. Further, the brushless motor 30 of the present embodiment may be a motor having an IPM (Interior Permanent Magnet) structure or a motor having an SPM (Surface Permanent Magnet) structure.
また、上述の実施形態において、ワイパスイッチ37により選択されるモードは、低速作動モード及び高速作動モードの2種類に限らず、3種類以上あってもよい。例えば、ワイパスイッチ37により選択されるモードは、低速作動モード、中速作動モード、高速作動モードの3種類あってもよい。ここで、中速作動モードにおけるロータ22の回転数は、低速払拭モードにおけるロータ22の回転数よりも高く、高速作動モードにおけるロータ22の回転数よりも低い。例えば、ワイパスイッチ37により中速作動モードが選択された場合、モータ制御装置33は、ブラシレスモータ30に対して3次高調波通電駆動を行ってもよいし、広角台形波通電駆動を行ってもよい。
また、高速作動モード、中速作動モードおよび低速作動モードに限らず、ブラシレスモータ30にかかる負荷が高いと判断されたときに、広角台形波通電駆動、あるいは、広角台形波+「進角>0°」通電駆動を行うようにしてもよい。つまり、ワイパスイッチ37により選択されるモードによらず、モード判定部63への高負荷信号の取得が行われた際に広角台形波通電駆動、あるいは、広角台形波+「進角>0°」通電駆動を行うことが可能である。 Further, in the above-described embodiment, the mode selected by thewiper switch 37 is not limited to two types of the low-speed operation mode and the high-speed operation mode, and may be three or more types. For example, the mode selected by the wiper switch 37 may be three types, a low speed operation mode, a medium speed operation mode, and a high speed operation mode. Here, the rotation speed of the rotor 22 in the medium speed operation mode is higher than the rotation speed of the rotor 22 in the low speed wiping mode, and is lower than the rotation speed of the rotor 22 in the high speed operation mode. For example, when the medium speed operation mode is selected by the wiper switch 37, the motor control device 33 may perform a third harmonic energization drive on the brushless motor 30 or a wide-angle trapezoidal wave energization drive. Good.
Further, not limited to the high-speed operation mode, the medium-speed operation mode, and the low-speed operation mode, when it is determined that the load applied to thebrushless motor 30 is high, the wide-angle trapezoidal wave energization drive or the wide-angle trapezoidal wave + "advance angle>0" ° ”The energization drive may be performed. That is, regardless of the mode selected by the wiper switch 37, when the high load signal is acquired to the mode determination unit 63, the wide-angle trapezoidal wave energization drive or the wide-angle trapezoidal wave + "advance angle> 0 °" It is possible to perform energization drive.
また、高速作動モード、中速作動モードおよび低速作動モードに限らず、ブラシレスモータ30にかかる負荷が高いと判断されたときに、広角台形波通電駆動、あるいは、広角台形波+「進角>0°」通電駆動を行うようにしてもよい。つまり、ワイパスイッチ37により選択されるモードによらず、モード判定部63への高負荷信号の取得が行われた際に広角台形波通電駆動、あるいは、広角台形波+「進角>0°」通電駆動を行うことが可能である。 Further, in the above-described embodiment, the mode selected by the
Further, not limited to the high-speed operation mode, the medium-speed operation mode, and the low-speed operation mode, when it is determined that the load applied to the
また、ワイパスイッチ37の切り替えに応じて作動モードを選択する場合について説明したが、作動モードの切り替えは、ワイパスイッチ37ではなく、雨滴センサからの検出結果に基づいて切り替えるようにしてもよい。例えば、雨滴センサは、車両周囲に降雨状況を検出する機能を有し、車両に取り付けられる。この雨滴センサからの検出結果に基づいて、雨量が基準値未満の場合に低速作動モードにし、雨量が基準値を超える場合に高速作動モードに切り替えるようにしてもよい。また、雨量の基準値を3つ設けることで、低速作動モード、中速作動モード、高速作動モードの3種類のうちいずれかに切り替えるようにしてもよい。
Further, although the case where the operation mode is selected according to the change of the wiper switch 37 has been described, the operation mode may be changed based on the detection result from the raindrop sensor instead of the wiper switch 37. For example, a raindrop sensor has a function of detecting a rainfall situation around a vehicle and is attached to the vehicle. Based on the detection result from the raindrop sensor, the low-speed operation mode may be set when the rainfall is less than the reference value, and the high-speed operation mode may be switched when the rainfall exceeds the reference value. Further, by providing three reference values for rainfall, it may be possible to switch to one of three types: low-speed operation mode, medium-speed operation mode, and high-speed operation mode.
上述した実施形態における制御部54をコンピュータで実現するようにしてもよい。その場合、この機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することによって実現してもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD-ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含んでもよい。また上記プログラムは、前述した機能の一部を実現するためのものであってもよく、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよく、FPGA(Field Programmable Gate Array)等のプログラマブルロジックデバイスを用いて実現されるものであってもよい。
The control unit 54 in the above-described embodiment may be realized by a computer. In that case, a program for realizing this function may be recorded on a computer-readable recording medium, and the program recorded on the recording medium may be read by a computer system and executed. The term "computer system" as used herein includes hardware such as an OS and peripheral devices. Further, the "computer-readable recording medium" refers to a portable medium such as a flexible disk, a magneto-optical disk, a ROM, or a CD-ROM, or a storage device such as a hard disk built in a computer system. Further, a "computer-readable recording medium" is a communication line for transmitting a program via a network such as the Internet or a communication line such as a telephone line, and dynamically holds the program for a short period of time. It may also include a program that holds a program for a certain period of time, such as a volatile memory inside a computer system that serves as a server or a client in that case. Further, the above program may be for realizing a part of the above-mentioned functions, and may be further realized for realizing the above-mentioned functions in combination with a program already recorded in the computer system. It may be realized by using a programmable logic device such as FPGA (Field Programmable Gate Array).
また、上述の実施形態において、負荷判定部62は、車速センサ40により計測される車速Vが所定値Vthを超えた場合や、回転角検出部39から供給されるパルス信号に基づいて検出されるロータ22の回転数または所定値が、予め設定された所定値を超えた場合に、ブラシレスモータ30の負荷が高負荷であると判定したが、これに限定されない。例えば、低出力モードでの動作中にブラシレスモータ30の動作に対し外力による抵抗値が増加した場合、ロータ22の回転速度(回転数)は、予め設定された目標回転速度(目標回転数)から低下する(ずれる)ことになる。このとき、制御部54は、ロータ22の回転速度(回転数)を予め設定された目標回転速度(目標回転数)に合わせるために、低出力モードの範囲内でDuty値を増加させる。そして、そのDuty値が所定の閾値を超えたことを制御部54が認識した場合、低出力モードから高出力モードに移行するとしてもよい。
Further, in the above-described embodiment, the load determination unit 62 detects when the vehicle speed V measured by the vehicle speed sensor 40 exceeds a predetermined value Vth or is based on a pulse signal supplied from the rotation angle detection unit 39. When the rotation speed or the predetermined value of the rotor 22 exceeds the preset predetermined value, it is determined that the load of the brushless motor 30 is high, but the load is not limited to this. For example, when the resistance value due to an external force increases with respect to the operation of the brushless motor 30 during the operation in the low output mode, the rotation speed (rotation speed) of the rotor 22 is set from the preset target rotation speed (target rotation speed). It will decrease (shift). At this time, the control unit 54 increases the Duty value within the range of the low output mode in order to match the rotation speed (rotation speed) of the rotor 22 with the preset target rotation speed (target rotation speed). Then, when the control unit 54 recognizes that the duty value exceeds a predetermined threshold value, the mode may shift from the low output mode to the high output mode.
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
Although the embodiments of the present invention have been described in detail with reference to the drawings, the specific configuration is not limited to this embodiment, and includes designs and the like within a range that does not deviate from the gist of the present invention.
11 フロントガラス
12 ワイパ装置
19 モータユニット
21u,21v,21w 3相の電機子コイル
22 ロータ(回転子)
52 インバータ
54 制御部
61 位置検出部
62 負荷判定部
63 モード判定部
64 駆動制御部
641 第1駆動制御部
642 第2駆動制御部 11Windshield 12 Wiper device 19 Motor unit 21u, 21v, 21w Three-phase armature coil 22 Rotor (rotor)
52Inverter 54 Control unit 61 Position detection unit 62 Load determination unit 63 Mode determination unit 64 Drive control unit 641 First drive control unit 642 Second drive control unit
12 ワイパ装置
19 モータユニット
21u,21v,21w 3相の電機子コイル
22 ロータ(回転子)
52 インバータ
54 制御部
61 位置検出部
62 負荷判定部
63 モード判定部
64 駆動制御部
641 第1駆動制御部
642 第2駆動制御部 11
52
Claims (8)
- 回転子およびU相、V相、W相の3相の電機子コイルを備えるブラシレスモータを制御するモータ制御装置であって、
前記回転子の回転位置を検出する位置検出部と、
第1の制御モードと第2の制御モードとを選択可能であり、
前記第1の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで第1駆動信号をインバータに出力し、
前記第2の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで第2駆動信号を前記インバータに出力する制御部と、
前記第1の制御モードにおいて、前記3相の電機子コイルへの印加電圧として第1通電信号を出力し、
前記第2の制御モードにおいて、前記3相の電機子コイルへの印加電圧として第2通電信号を出力する前記インバータと、
を備え、
前記3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、前記第1の制御モードよりも前記第2の制御モードの方が大きい
モータ制御装置。 A motor control device that controls a brushless motor including a rotor and three-phase armature coils of U-phase, V-phase, and W-phase.
A position detection unit that detects the rotation position of the rotor, and
The first control mode and the second control mode can be selected.
In the first control mode, the first drive signal is output to the inverter at the energization timing according to the rotation position of the rotor.
In the second control mode, a control unit that outputs a second drive signal to the inverter at an energization timing according to the rotation position of the rotor.
In the first control mode, a first energization signal is output as a voltage applied to the three-phase armature coil.
In the second control mode, the inverter that outputs a second energization signal as a voltage applied to the three-phase armature coil, and the inverter.
With
A motor control device in which the duty value when the duty of the applied voltage becomes the same for any two of the three phases is larger in the second control mode than in the first control mode. - 前記第1通電信号は、
正弦波に3次高調波が重畳された波形を有し、
前記第2通電信号は、
正弦波に3次高調波が重畳された波形において、
前記3相のうちの前記U相の印加電圧のデューティのみが100%となる通電区間と前記V相の印加電圧のデューティのみが100%となる通電区間との間に、前記U相および前記V相の印加電圧のデューティが共に100%のデューティとなる通電区間と、
前記3相のうちの前記V相の印加電圧のデューティのみが100%となる通電区間と前記W相の印加電圧のデューティのみが100%となる通電区間との間に、前記V相および前記W相の印加電圧のデューティが共に100%となる通電区間と、
前記3相のうちの前記W相の印加電圧のデューティのみが100%となる通電区間と前記U相の印加電圧のデューティのみが100%となる通電区間との間に、前記W相および前記V相の印加電圧のデューティが共に100%となる通電区間と、
を備えた波形を有する、
を備える請求項1に記載のモータ制御装置。 The first energization signal is
It has a waveform in which a third harmonic is superimposed on a sine wave.
The second energization signal is
In a waveform in which a third harmonic is superimposed on a sine wave
Of the three phases, the U phase and the V are between an energized section in which only the duty of the applied voltage of the U phase is 100% and an energized section in which only the duty of the applied voltage of the V phase is 100%. The energized section where the duty of the applied voltage of the phase is 100%, and
The V phase and the W are between an energized section in which only the duty of the applied voltage of the V phase of the three phases is 100% and an energized section in which only the duty of the applied voltage of the W phase is 100%. The energized section where the duty of the applied voltage of the phase is 100%, and
The W phase and the V are between the energized section in which only the duty of the applied voltage of the W phase of the three phases is 100% and the energized section in which only the duty of the applied voltage of the U phase is 100%. The energized section where the duty of the applied voltage of the phase is 100%, and
Has a waveform with
The motor control device according to claim 1. - 前記第2の制御モードにおいて、
前記制御部は、前記回転子の回転位置を基準として、前記第1の制御モードにおける進角よりも大きな電気角だけ進角させた通電タイミングで、前記第2駆動信号を前記インバータに出力する、
請求項1または請求項2に記載のモータ制御装置。 In the second control mode
The control unit outputs the second drive signal to the inverter at an energization timing in which an electric angle larger than the advance angle in the first control mode is advanced with reference to the rotation position of the rotor.
The motor control device according to claim 1 or 2. - 前記第2通電信号は、前記第1通電信号の振幅を前記電機子コイルへの印加電圧のデューティにおける50%よりも大きな値に変化させた波形において、印加電圧のデューティが100%以上となる通電区間は印加電圧のデューティを100%とし、かつ、印加電圧のデューティが0%以下となる通電区間は印加電圧のデューティを0%とした波形である
請求項1から請求項3のいずれか1項に記載のモータ制御装置。 The second energization signal is an energization in which the duty of the applied voltage is 100% or more in a waveform in which the amplitude of the first energization signal is changed to a value larger than 50% of the duty of the applied voltage to the armature coil. The section is a waveform in which the duty of the applied voltage is 100% and the duty of the applied voltage is 0% or less, and the energized section is a waveform in which the duty of the applied voltage is 0%. Any one of claims 1 to 3. The motor control device according to. - 前記制御部は、前記3相のうち少なくとも1相の印加電圧のデューティが100%以上となる通電区間が110°から155°の範囲となるように通電する
請求項1から請求項4のいずれか1項に記載のモータ制御装置。 Any one of claims 1 to 4, wherein the control unit energizes so that the energization section in which the duty of the applied voltage of at least one of the three phases is 100% or more is in the range of 110 ° to 155 °. The motor control device according to item 1. - 回転子およびU相、V相、W相の3相の電機子コイルを備えるブラシレスモータを制御するモータ制御装置におけるモータ制御方法であって、
前記モータ制御装置は、
前記回転子の回転位置を検出する位置検出部と、
第1の制御モードと第2の制御モードとを選択可能であり、
前記第1の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで第1駆動信号をインバータに出力し、
前記第2の制御モードにおいて、前記回転子の回転位置に応じた通電タイミングで第2駆動信号を前記インバータに出力する制御部と、
前記第1の制御モードにおいて、前記3相の電機子コイルへの印加電圧として第1通電信号を出力し、
前記第2の制御モードにおいて、前記3相の電機子コイルへの印加電圧として第2通電信号を出力する前記インバータと、
を備え、
前記制御部は、前記3相のうちいずれか2つの相について、印加電圧のデューティが同じになるときのデューティの値が、前記第1の制御モードよりも前記第2の制御モードの方が大きくなるように制御する
モータ制御方法。 A motor control method in a motor control device that controls a rotor and a brushless motor including a U-phase, V-phase, and W-phase three-phase armature coil.
The motor control device is
A position detection unit that detects the rotation position of the rotor, and
The first control mode and the second control mode can be selected.
In the first control mode, the first drive signal is output to the inverter at the energization timing according to the rotation position of the rotor.
In the second control mode, a control unit that outputs a second drive signal to the inverter at an energization timing according to the rotation position of the rotor.
In the first control mode, a first energization signal is output as a voltage applied to the three-phase armature coil.
In the second control mode, the inverter that outputs a second energization signal as a voltage applied to the three-phase armature coil, and the inverter.
With
In the control unit, the duty value when the duty of the applied voltage is the same for any two of the three phases is larger in the second control mode than in the first control mode. A motor control method that controls the voltage. - ワイパアームを揺動動作させるブラシレスワイパーモータであるブラシレスモータと、
請求項1から請求項5のいずれか1項に記載のモータ制御装置と、
を備えるモータユニット。 A brushless motor, which is a brushless wiper motor that swings the wiper arm,
The motor control device according to any one of claims 1 to 5.
Motor unit with. - ルーフパネルを開閉動作させるブラシレスサンルーフモータと、
請求項1から請求項5のいずれか1項に記載のモータ制御装置と、
を備えるモータユニット。 A brushless sunroof motor that opens and closes the roof panel,
The motor control device according to any one of claims 1 to 5.
Motor unit with.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021509581A JP7462613B2 (en) | 2019-03-26 | 2020-03-26 | MOTOR CONTROL DEVICE, MOTOR CONTROL METHOD, AND MOTOR UNIT |
| US17/442,576 US20220190756A1 (en) | 2019-03-26 | 2020-03-26 | Motor control device, motor control method, and motor unit |
| EP20778234.3A EP3952101A4 (en) | 2019-03-26 | 2020-03-26 | Motor control device, motor control method, and motor unit |
| CN202080022237.3A CN113615068A (en) | 2019-03-26 | 2020-03-26 | Motor control device, motor control method, and motor unit |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-059243 | 2019-03-26 | ||
| JP2019059243 | 2019-03-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020196744A1 true WO2020196744A1 (en) | 2020-10-01 |
Family
ID=72611041
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/013643 WO2020196744A1 (en) | 2019-03-26 | 2020-03-26 | Motor control device, motor control method, and motor unit |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220190756A1 (en) |
| EP (1) | EP3952101A4 (en) |
| JP (1) | JP7462613B2 (en) |
| CN (1) | CN113615068A (en) |
| WO (1) | WO2020196744A1 (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003274623A (en) * | 2002-03-14 | 2003-09-26 | Mitsuba Corp | Brushless motor and control method therefor |
| JP2006223097A (en) * | 2006-04-21 | 2006-08-24 | Mitsubishi Electric Corp | Permanent magnet motor, control method for permanent magnet motor, control device for permanent magnet motor, compressor, and refrigeration/air-conditioning device |
| JP2014195389A (en) | 2013-02-26 | 2014-10-09 | Mitsuba Corp | Brushless motor and wiper device |
| JP2015033278A (en) * | 2013-08-06 | 2015-02-16 | ローム株式会社 | Motor drive unit |
| WO2017159214A1 (en) | 2016-03-16 | 2017-09-21 | 株式会社ミツバ | Motor control device and motor unit |
| JP2019004075A (en) * | 2017-06-16 | 2019-01-10 | 東京エレクトロン株式会社 | Manufacturing method of magnetoresistive element |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9660559B2 (en) * | 2012-04-16 | 2017-05-23 | Mitsuba Corporation | Brushless motor and wiper apparatus |
| US9698722B2 (en) * | 2015-06-19 | 2017-07-04 | Deere & Company | Method and inverter with thermal management for controlling an electric machine |
| JP6852587B2 (en) * | 2017-06-20 | 2021-03-31 | 株式会社デンソー | Vehicle wiper device |
| JP6921687B2 (en) * | 2017-08-31 | 2021-08-18 | 株式会社ミツバ | Wiper device |
-
2020
- 2020-03-26 US US17/442,576 patent/US20220190756A1/en active Pending
- 2020-03-26 EP EP20778234.3A patent/EP3952101A4/en active Pending
- 2020-03-26 WO PCT/JP2020/013643 patent/WO2020196744A1/en unknown
- 2020-03-26 CN CN202080022237.3A patent/CN113615068A/en active Pending
- 2020-03-26 JP JP2021509581A patent/JP7462613B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003274623A (en) * | 2002-03-14 | 2003-09-26 | Mitsuba Corp | Brushless motor and control method therefor |
| JP2006223097A (en) * | 2006-04-21 | 2006-08-24 | Mitsubishi Electric Corp | Permanent magnet motor, control method for permanent magnet motor, control device for permanent magnet motor, compressor, and refrigeration/air-conditioning device |
| JP2014195389A (en) | 2013-02-26 | 2014-10-09 | Mitsuba Corp | Brushless motor and wiper device |
| JP2015033278A (en) * | 2013-08-06 | 2015-02-16 | ローム株式会社 | Motor drive unit |
| WO2017159214A1 (en) | 2016-03-16 | 2017-09-21 | 株式会社ミツバ | Motor control device and motor unit |
| JP2019004075A (en) * | 2017-06-16 | 2019-01-10 | 東京エレクトロン株式会社 | Manufacturing method of magnetoresistive element |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3952101A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220190756A1 (en) | 2022-06-16 |
| JP7462613B2 (en) | 2024-04-05 |
| JPWO2020196744A1 (en) | 2020-10-01 |
| CN113615068A (en) | 2021-11-05 |
| EP3952101A4 (en) | 2022-04-20 |
| EP3952101A1 (en) | 2022-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017159214A1 (en) | Motor control device and motor unit | |
| EP2738052B1 (en) | Motor control device | |
| WO2020066266A1 (en) | Driving device for rotary electric machine | |
| JP6852587B2 (en) | Vehicle wiper device | |
| WO2020196744A1 (en) | Motor control device, motor control method, and motor unit | |
| JP2015168273A (en) | wiper control device | |
| JP2015126547A (en) | Brushless motor and wiper device | |
| JP6658783B2 (en) | Wiper control device | |
| JP2015196464A (en) | wiper control device | |
| JP6077771B2 (en) | Wiper device | |
| US11716038B2 (en) | Motor control device, motor unit, and motor control method | |
| JP2018090129A (en) | Wiper device | |
| JP6838842B2 (en) | Wiper device | |
| JP6859728B2 (en) | Wiper device | |
| WO2022239584A1 (en) | Vehicular wiper device and method of controlling vehicular wiper device | |
| JP6593215B2 (en) | Wiper control device | |
| JP2018134959A (en) | Wiper device | |
| JP6294430B2 (en) | Wiper device | |
| JP2023158666A (en) | wiper control device | |
| JP2019043158A (en) | Wiper device | |
| JP4455275B2 (en) | Multiple inverter motor controller | |
| JP2023103512A (en) | Motor unit and motor control method | |
| JP2023156089A (en) | wiper control device | |
| WO2008075532A1 (en) | Inverter device and its control method | |
| JP2019043159A (en) | Wiper device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20778234 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021509581 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020778234 Country of ref document: EP Effective date: 20211026 |