WO2020009172A1 - カメラ - Google Patents
カメラ Download PDFInfo
- Publication number
- WO2020009172A1 WO2020009172A1 PCT/JP2019/026541 JP2019026541W WO2020009172A1 WO 2020009172 A1 WO2020009172 A1 WO 2020009172A1 JP 2019026541 W JP2019026541 W JP 2019026541W WO 2020009172 A1 WO2020009172 A1 WO 2020009172A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- imaging
- image
- base line
- line length
- optical system
- Prior art date
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 189
- 230000003287 optical effect Effects 0.000 claims abstract description 71
- 238000012545 processing Methods 0.000 description 39
- 238000004891 communication Methods 0.000 description 21
- 238000004364 calculation method Methods 0.000 description 13
- 238000001514 detection method Methods 0.000 description 13
- 238000005516 engineering process Methods 0.000 description 10
- 238000012937 correction Methods 0.000 description 7
- 238000000034 method Methods 0.000 description 7
- 238000005259 measurement Methods 0.000 description 5
- QNRATNLHPGXHMA-XZHTYLCXSA-N (r)-(6-ethoxyquinolin-4-yl)-[(2s,4s,5r)-5-ethyl-1-azabicyclo[2.2.2]octan-2-yl]methanol;hydrochloride Chemical compound Cl.C([C@H]([C@H](C1)CC)C2)CN1[C@@H]2[C@H](O)C1=CC=NC2=CC=C(OCC)C=C21 QNRATNLHPGXHMA-XZHTYLCXSA-N 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 102100034112 Alkyldihydroxyacetonephosphate synthase, peroxisomal Human genes 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000013135 deep learning Methods 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000001537 neural effect Effects 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
Definitions
- the present technology relates to a camera, and more particularly, to a camera that can capture a stereo image.
- Patent Document 1 describes a camera that captures a stereo image (left-eye image and right-eye image) with a configuration having a single image sensor.
- Japanese Patent Application Laid-Open No. H11-163873 discloses that when capturing a stereo image (a left-eye image and a right-eye image) with a configuration having a single image sensor, the left-eye image and the right-eye image are captured in different areas on the imaging surface of the image sensor. Is described.
- the distance can be obtained with higher resolution as the base line length when capturing a stereo image is longer, and furthermore, when the base line length is made longer, the common area of the left eye image and the right eye image Is narrowed, and parallax cannot be obtained in a short-distance area (for example, see Patent Document 3).
- the purpose of the present technology is to make it possible to obtain distance with high resolution and obtain parallax in a short-distance region.
- the concept of this technology is An image sensor; A first imaging optical system that forms a left-eye image according to a first base line length on a first region of an imaging surface of the imaging element; A second imaging optical system that forms a right-eye image corresponding to the first base line length on a second region of an imaging surface of the imaging element; A third imaging optical system that forms a left-eye image according to a second baseline length shorter than the first baseline length on a third region of the imaging surface of the imaging element; The camera includes a fourth imaging optical system that forms a right-eye image according to the second base line length on a fourth region of an imaging surface of the imaging element.
- the camera includes an imaging element and first to fourth imaging optical systems.
- the first imaging optical system forms an image of the left eye corresponding to the first base line length in a first region of the imaging surface of the imaging device
- the second imaging optical system forms a second image of the imaging surface of the imaging device.
- the right eye image according to the first base line length is formed in the region of.
- the third imaging optical system forms an image of the left eye corresponding to the second base line length in a third region of the imaging surface of the imaging device
- the fourth imaging optical system forms an image of the imaging surface of the imaging device.
- the right eye image according to the second base line length is formed in the fourth area.
- the second base line length is shorter than the first base line length.
- each of the first to fourth imaging optical systems may include a rhomboid prism.
- the rhomboid prisms included in the first to fourth imaging optical systems are arranged such that the emission surfaces are in contact with the first to fourth regions of the imaging surface of the imaging device. You may be.
- a light-blocking member may be provided in an outer surface area corresponding to at least the reflection surface on the emission surface side of each of the rhomboid prisms included in the first to fourth imaging optical systems.
- the first to fourth regions of the imaging surface of the imaging device may be regions obtained by dividing the imaging surface into a cross-shaped shape.
- a stereo image (a left-eye image and a right-eye image) when the base line length is relatively long is obtained by imaging using the first region and the second region of the imaging surface of the imaging device.
- the distance can be obtained with high resolution
- a stereo image (left-eye image) when the base line length is relatively short by imaging with the third and fourth regions of the imaging surface of the imaging device , Right-eye image).
- the common area of the left-eye image and the right-eye image is widened, and it is possible to obtain parallax in a short-distance area.
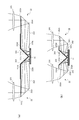
- FIG. 3 is a diagram for explaining an optical path and the like in each of first to fourth imaging optical systems. It is a figure which shows the width
- FIG. 4 is a block diagram illustrating a configuration example of a processing unit that performs an object recognition process and a distance measurement process to a recognized object in an image processing circuit.
- Embodiment> [camera] 1 and 2 show a configuration example of a camera 10 as an embodiment.
- FIG. 1 is a schematic perspective view of the camera 10
- FIG. 2 is a schematic front view of the camera 10.
- the camera 10 includes the imaging element 11, the first imaging optical system 21, the second imaging optical system 22, the third imaging optical system 23, and the fourth imaging optical system 24.
- the image sensor (imager) 11 is an individual image sensor such as a CCD (Charged-coupled devices) image sensor or a CMOS (Complementary metal-oxide-semiconductor) image sensor.
- the image pickup device 11 has its image pickup surface 111 divided into a plurality of regions, and different images are picked up in the respective regions.
- the imaging surface 111 is divided into a first area 111a, a second area 111b, a third area 111c, and a fourth area 111d in a cross-shaped manner, and these four areas are different from each other. Images are taken simultaneously.
- the first imaging optical system 21 includes an imaging lens 211 and a rhomboid prism (rhombic prism) 212.
- the rhomboid prism 212 is arranged such that its emission surface 212b contacts the first area 111a of the imaging surface 111 of the imaging device 11.
- the imaging lens 211 is arranged at a position facing the incident surface 212a of the rhomboid prism 212.
- a light shielding member 213 is provided at least on the outer surface area of the reflection surface 212d corresponding to the emission surface 212b of the rhomboid prism 212.
- the light-blocking member 213 is provided on the rhomboid prism 212 by attaching a light-blocking sheet or applying a light-blocking paint.
- the reason why the light shielding member 213 is provided in this way is to suppress the influence of light incident from the outer surface region. The same applies to the light-blocking members provided in other rhomboid prisms described below.
- the second imaging optical system 22 includes an imaging lens 221 and a rhomboid prism (rhombic prism) 222.
- the rhomboid prism 222 is arranged such that its emission surface 222b is in contact with the second region 111b of the imaging surface 111 of the imaging device 11.
- the rhomboid prism 222 is continuous with the above-described rhomboid prism 212 of the first imaging optical system 21 on the same straight line.
- the imaging lens 221 is arranged at a position facing the incident surface 222a of the rhomboid prism 222.
- a light-blocking member 223 is provided at least on the outer surface area of the reflection surface 222d corresponding to the emission surface 222b of the rhomboid prism 222.
- the first imaging optical system 21 forms the left-eye image corresponding to the first base line length L1 on the first area 111a of the imaging surface 111 of the imaging element 11.
- the light from the subject incident on the imaging lens 211 is incident from the incident surface 212a of the rhomboid prism 212, is reflected by the reflecting surface 212c, and is thereafter reflected by the reflecting surface 212c.
- the light is reflected from the emission surface 212d, is emitted from the emission surface 212b, reaches the first region 111a of the imaging surface 111 of the imaging device 11, and forms a left-eye image corresponding to the first base line length L1 on the first region 111a. Imaged.
- the second imaging optical system 22 forms the right-eye image according to the first base line length L1 on the second area 111b of the imaging surface 111 of the imaging element 11.
- the light from the subject incident on the imaging lens 221 is incident from the incident surface 222a of the rhomboid prism 222, is reflected on the reflecting surface 222c, and is thereafter reflected by the reflecting surface 222c.
- the light is reflected at 222d, is emitted from the emission surface 222b, reaches the second region 111b of the imaging surface 111 of the imaging device 11, and the right eye image according to the first base line length L1 is formed on the second region 111b. Imaged.
- the first base line length L1 is the distance between the optical axes of the imaging lenses 211 and 221 as shown in FIG.
- the first base length L1 is determined by the lengths of the Lomboid prism 212 of the first imaging optical system 21 and the Lomboid prism 222 of the second imaging optical system 22.
- the first base line length L1 can be adjusted by changing the lengths of the Lomboid prism 212 of the first imaging optical system 21 and the Lomboid prism 222 of the second imaging optical system 22.
- the third imaging optical system 23 includes an imaging lens 231 and a rhomboid prism (rhombic prism) 232.
- the rhomboid prism 232 is arranged such that its emission surface 232b contacts the third region 111c of the imaging surface 111 of the imaging device 11. In this case, the rhomboid prism 232 is in a state of being arranged adjacent to the above-described rhomboid prism 212 of the first imaging optical system 21.
- the imaging lens 231 is arranged at a position facing the entrance surface 232a of the rhomboid prism 232.
- a light-blocking member 233 is provided on at least the outer surface area of the reflection surface 232d corresponding to the emission surface 232b of the rhomboid prism 232.
- the fourth imaging optical system 24 includes an imaging lens 241 and a rhomboid prism (rhombic prism) 242.
- the rhomboid prism 242 is arranged such that its emission surface 242b contacts the fourth region 111d of the imaging surface 111 of the imaging device 11.
- the rhomboid prism 242 becomes continuous with the above-described rhomboid prism 232 of the third imaging optical system 23 on the same straight line, and the rhomboid prism 222 of the second imaging optical system 22 described above. And a state in which they are adjacent to each other.
- the imaging lens 241 is disposed at a position facing the incident surface 242a of the rhomboid prism 242.
- a light-blocking member 243 is provided at least on the outer surface area of the reflection surface 242d corresponding to the emission surface 242b of the rhomboid prism 242.
- the third imaging optical system 23 forms the left-eye image corresponding to the second base line length L2 on the third area 111c of the imaging surface 111 of the imaging element 11.
- the second base line length L2 is set shorter than the above-described first base line length L1.
- the light from the subject incident on the imaging lens 231 is incident on the incident surface 232a of the rhomboid prism 232, is reflected on the reflecting surface 232c, and is further reflected thereafter.
- the light is reflected by the light exit surface 232d, is emitted from the light exit surface 232b, reaches the third region 111c of the image pickup surface 111 of the image pickup device 11, and the left region image corresponding to the second base line length L2 is formed on the third region 111c. Imaged.
- the fourth imaging optical system 24 forms the right-eye image corresponding to the second base line length L2 on the fourth area 111d of the imaging surface 111 of the imaging element 11.
- light from the subject incident on the imaging lens 241 is incident on the incident surface 242a of the rhomboid prism 242, is reflected on the reflecting surface 242c, and is thereafter reflected on the reflecting surface 242c.
- the light is reflected by the light exit surface 242d, is emitted from the light exit surface 242b, reaches the fourth region 111d of the image pickup surface 111 of the image pickup device 11, and the right eye image according to the second base line length L2 is formed in the fourth region 111d.
- Imaged
- the second base line length L2 is a distance between the optical axes of the imaging lenses 231, 241 as shown in FIG.
- the second base line length L2 is determined by the lengths of the Lomboid prism 232 of the third imaging optical system 23 and the Lomboid prism 242 of the fourth imaging optical system 24.
- the second base line length L2 can be adjusted by changing the lengths of the Lomboid prism 232 of the third imaging optical system 23 and the Lomboid prism 242 of the fourth imaging optical system 24.
- a stereo image (left image) when the base line length is relatively short is obtained by imaging the third area 111 c and the fourth area 111 d of the imaging surface 111 of the imaging element 11.
- Eye image, right-eye image and in this case, the common area of the left-eye image and the right-eye image is widened, and it is possible to obtain parallax in a short-distance area.
- FIG. 4A shows a left-eye image captured by the first imaging optical system 21 in the first region 111 a of the imaging device 11 and a second region 111 b of the imaging device 11 by the second imaging optical system 22.
- the imaging area of the right eye image to be imaged is shown.
- the first base line length L1 is relatively long, the common area of the left-eye image and the right-eye image is narrowed, and it is difficult to obtain parallax in a short-distance area.
- FIG. 5B shows an image of the left-eye image IFL and the right-eye image IFR when the subject as shown in FIG. 5A is imaged at the first base line length L1.
- FIG. 4B shows a left-eye image captured by the third imaging optical system 23 in the third region 111 c of the imaging device 11 and a fourth image of the imaging device 11 by the fourth imaging optical system 24.
- 4 shows an imaging region of a right-eye image captured in an area 111d.
- the second base line length L2 is relatively short, the common area of the left-eye image and the right-eye image is widened, and parallax can be obtained in a short-distance area.
- FIG. 5C shows an image of the left-eye image INL and the right-eye image INR when the subject as shown in FIG. 5A is imaged with the second base line length L2.
- FIG. 6 shows a configuration example of the vehicle control system 300.
- This vehicle control system 300 includes the camera 10 shown in FIG. 1, and the components are interconnected via a CAN bus.
- the vehicle-mounted camera 100 is disposed, for example, near the rearview mirror inside the windshield of the vehicle, and captures an image in front of the vehicle in the traveling direction.
- the image captured by the on-vehicle camera 100 is basically used for the purpose of sensing, and image processing such as image recognition is applied to the captured image, and a white line (lane) of a road, a traffic light, a road sign, an oncoming vehicle, a host vehicle It is assumed that nearby pedestrians are detected.
- the image captured by the on-vehicle camera 100 may be used for viewing purposes, and the image may be displayed in the vehicle interior.
- the vehicle camera 100 includes an imaging optical system 101, an imaging device 102, an image processing circuit 103, and a communication processing circuit 104.
- the camera 10 shown in FIG. 1 corresponds to the imaging optical system 101 and the imaging device 102.
- the image sensor 102 outputs the captured image signal to the image processing circuit 103 by, for example, serial communication.
- the image processing circuit 103 is configured by, for example, an ECU (Electronic Control Unit). In the image processing circuit 103, image processing, recognition processing, and distance measurement processing are performed based on the captured image signal.
- Image processing performed in the image processing circuit 103 includes processing such as AE (Automatic Exposure: automatic exposure control), AWB (Auto White Balance: automatic white balance adjustment), and HDR (High Dynamic Range: high dynamic range synthesis). Can be mentioned. However, these image processes can be performed on the image sensor 102 side.
- the recognition processing performed in the image processing circuit 103 includes detection of a white line (lane) of a road (Lane Detection), detection of a pedestrian (Pedestrian Detection), detection of a nearby vehicle (Vehicle Detection), and headlights for turning on an oncoming vehicle. Detection (Headlight Detection), detection of lighting of the brake light of the preceding vehicle (Automatic Emergency Breaking), signal recognition (Traffic Sign Recognition), etc. are performed.
- FIG. 7 shows an example of the configuration of the processing unit 130 that performs the object recognition process and the distance measurement process to the recognized object in the image processing circuit 103.
- the processing unit 130 includes an image division unit 131, a distortion correction unit 132, a parallax calculation unit 133, an object recognition unit 134, and a distance calculation unit 135.
- the image division unit 131 is supplied with a captured image signal obtained by the image sensor 102 (corresponding to the image sensor 11 in FIG. 1).
- the captured image signal includes the image signal Sfl of the left-eye image FL related to the first base line length L1 obtained from the first region 111a of the imaging surface 111, and includes the image signal Sfl of the second region 111b of the imaging surface 111.
- the obtained image signal Sfr of the right eye image FR related to the first base line length L1 is obtained.
- the captured image signal includes the image signal Snl of the left eye image NL relating to the second base line length L2 obtained from the third region 111c of the imaging surface 111, and the fourth region of the imaging surface 111.
- the image signal Snr of the right eye image NR related to the second base line length L2 obtained from 111d is included.
- the image dividing unit 131 extracts and outputs each of the image signal Sfl, the image signal Sfr, the image signal Snl, and the image signal Snr from the captured image signal.
- the captured image signal is an image signal of 4K resolution
- the image signal Sfl, the image signal Sfr, the image signal Snl, and the image signal Snr Are image signals of 2K (HD) resolution.
- the image signal Sfl, the image signal Sfr, the image signal Snl, and the image signal Snr output from the image division unit 131 are supplied to the distortion correction unit 132.
- the distortion correction unit 132 corrects the distortion of the optical system, and corrects the parallelism between the pair of the image signal Sfl and the image signal Sfr and the pair of the image signal Snl and the image signal Snr. This correction is a correction for converting each pair into an ideal parallelized stereo image signal obtained when two pinhole cameras are mounted in parallel.
- the image signal Sfl, the image signal Sfr, the image signal Snl, and the image signal Snr whose distortion has been corrected by the distortion correction unit 132 are supplied to the parallax calculation unit 133.
- the parallax calculation unit 133 generates a first parallax map DMf related to the first base line length L1 from the image signal Sfl and the image signal Sfr. In this case, for example, by using the image signal Sfl as a reference image and performing a matching process with the image signal Sfr for each pixel to obtain disparity information, the first disparity map DMf is generated.
- the parallax calculation unit 133 generates a second parallax map DMn related to the second base line length L2 from the image signal Snl and the image signal Snr.
- the second disparity map DMn is generated.
- the image signal Sfl and the image signal Snl whose distortion has been corrected by the distortion correction unit 132 are supplied to the object recognition unit 134.
- the object recognizing unit 134 recognizes objects (pedestrians, surrounding vehicles, etc.) based on the image signal Sfl related to the first base line length L1 using a known object recognition technology, and determines the type of each recognized object.
- the information TYf and the position information PSf in the image are output as a recognition result.
- the object recognizing unit 134 recognizes objects (pedestrians, surrounding vehicles, and the like) based on the image signal Snl relating to the second base line length L2 using a well-known object recognition technology, and recognizes each recognized object.
- Information TYn indicating the type and position information PSn in the image are output as a recognition result.
- the distance calculation unit 135 includes a first parallax map DMf related to the first base line length L1 generated by the parallax calculation unit 133 and an image signal Sfl related to the first base line length L1 obtained by the object recognition unit 134. Position information PSf in the image of each object recognized based on the information is supplied. The distance calculation unit 135 calculates the distance to each object and outputs distance information DSf. In this case, for each recognized object, the distance calculation unit 135 acquires the disparity corresponding to the object from the first disparity map DMf with reference to the position information PSf in the image of the object, and uses the disparity. Then, the distance to the object is calculated from the principle of triangulation as is conventionally known.
- the distance calculation unit 135 includes a second parallax map DMn related to the second base line length L2 generated by the parallax calculation unit 133 and an image signal related to the second base line length L2 obtained by the object recognition unit 134. Position information PSn in the image of each object recognized based on Snl is supplied. The distance calculation unit 135 calculates the distance to each object and outputs distance information DSn. In this case, the distance calculation unit 135 acquires, for each recognized object, the disparity corresponding to the object from the second disparity map DMn with reference to the position information PSn in the image of the object, and uses the disparity. Then, the distance to the object is calculated from the principle of triangulation as is well known in the art.
- the processing unit 130 recognizes an object (a pedestrian, a nearby vehicle, or the like) from the image signal Sfl related to the first base line length L1, and the information TYf indicating the type of each recognized object and the position in the image. Information PSf and distance information DSf indicating the distance to each recognized object are obtained.
- the processing unit 130 also recognizes objects (pedestrians, nearby vehicles, and the like) from the image signal Snl relating to the second base line length L2, and information TYn indicating the type of each recognized object and position information in the image. PSn and distance information DSn indicating the distance to each recognized object are obtained.
- the communication processing circuit 104 is constituted by, for example, an MCU (Micro Control Unit).
- the communication processing circuit 104 is an interface with the CAN communication in the control system 300, and performs format conversion between a signal format in the CAN communication and a signal format inside the vehicle-mounted camera 100.
- the above detection and recognition results by the image processing circuit 103 are transmitted to the vehicle control system 300 via the communication processing circuit 104.
- the communication processing unit (Communication Unit) 301 on the vehicle control system 300 performs transmission and reception of data in inter-vehicle communication, inter-vehicle communication, road-to-vehicle communication, and communication with the in-vehicle camera 100.
- the communication processing unit 301 also performs exchange with a server (not shown). It is assumed that the communication processing unit 301 can apply various types of wireless communication.
- the automatic driving control unit (Self Driving ECU) 302 is an ECU including a CPU (Central Processing Unit), an ISP (Image Signal Processor), a GPU (Graphic Processing Unit), and the like, and controls the automatic driving of the vehicle.
- the result of image recognition of the image captured by the on-board camera 100 by the GPU can be sent to the server via the communication processing unit 301, and the learning result can be received by executing deep learning by a server such as a deep neural net. .
- the driving assistance control unit (ADAS @ ECU) 303 can transmit and receive signals to and from each component of the vehicle via CAN communication.
- the driving support control unit 303 generates a control signal for controlling each component of the vehicle in accordance with the driving operation of the driver, the recognition result of the captured image by the vehicle-mounted camera 100, and the like, and sends the control signal via CAN communication.
- the steering 304, the head lamp 305, the brake 306, the engine 307, and the motor 308 are components of the vehicle that are controlled by the automatic driving control unit 302 and the driving support control unit 303. However, it should be understood that there are other components of the vehicle that can be controlled, other than those shown in FIG.
- the driving support control unit 303 when the driving support control unit 303 detects that the own vehicle is about to deviate from the white line based on the image recognition of the image captured by the on-board camera 100, it drives an EPS (Electronic Power Steering) motor for the steering 304. To send a control signal.
- the driving support control unit 303 detects the presence or absence of the headlight of the oncoming vehicle by recognizing the image captured by the on-board camera 100, and switches between the high beam and the low beam of the headlamp 305. Alternatively, a high beam is emitted so as to avoid oncoming vehicles.
- the image processing circuit 103 in the in-vehicle camera 100 may output only recognized sensing information, that is, a detection result by image recognition, instead of outputting the image information itself as the recognition processing. Some sensing information is illustrated below.
- FCW Forward Collision Warning
- AEB Automatic Emergency Breaking
- LDW Vehicle Detection for FCW / AEB -Lane Departure Warning
- TJP Traffic Jam Pilot
- controlling the vehicle speed according to the presence or absence of a preceding vehicle controlling the vehicle speed by recognizing a road sign related to the speed limit, controlling the vehicle speed by recognizing the road sign at the entrance or exit of the highway, Automatically decelerates when the vehicle approaches a curve.
- LKA Lik Keeping Aid
- VOACC Adaptive Cruise Control
- VTSR Traffic Sign Recognition
- IHC -Intelligent Head Ramp Control
- the present technology can be applied to cameras mounted on various mobile devices such as ships, aircrafts, and mobile robots in addition to cars.
- the present technology may have the following configurations.
- each of the first to fourth imaging optical systems includes a rhomboid prism.
- the rhomboid prisms included in the first to fourth imaging optical systems are respectively arranged such that an emission surface comes into contact with the first to fourth regions of the imaging surface of the imaging device.
- the camera according to (2) The camera according to (2).
- a light-blocking member is provided in at least an outer surface area of each of the rhomboid prisms included in the first to fourth imaging optical systems corresponding to the reflection surface on the emission surface side.
- the first to fourth regions on the imaging surface of the imaging device are regions obtained by dividing the imaging surface into a cross-shaped cross. Any of the above (1) to (4) Camera described.
- Imaging surface 111a first area 111b: second area 111c: third area 111d: fourth area 211, 21, 21, 231, 241: imaging Lenses 212, 222, 232, 242... Lomboid prisms 212a, 222a, 232a, 242a.
- 242c, 242d Reflecting surface 213, 223, 233, 243: Light shielding member 100: In-vehicle camera 101: Imaging optical system 102: Imaging element 1 3 image processing circuit 104 communication processing circuit 131 image dividing unit 132 distortion correcting unit 133 parallax calculating unit 134 object recognizing unit 135 distance calculating unit 300 ... Vehicle control system 301 ... Communication processing unit 302 ... Automatic driving control unit 303 ... Driving support control unit 304 ... Steering 305 ... Head lamp 306 ... Brake 307 ... Engine 308 ⁇ ⁇ ⁇ Motor
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
高分解能で距離を求めることと近距離の領域で視差を求めることを両立可能とする。 カメラは、撮像素子と、第1から第4の撮像光学系を備える。第1の撮像光学系は、撮像素子の撮像面の第1の領域に第1の基線長に係る左眼画像を結像する。第2の撮像光学系は、撮像素子の撮像面の第2の領域に第1の基線長に係る右眼画像を結像する。また、第3の撮像光学系は、撮像素子の撮像面の第3の領域に第2の基線長に係る左眼画像を結像する。第4の撮像光学系は、撮像素子の撮像面の第4の領域に第2の基線長に係る右眼画像を結像する。第2の基線長は、第1の基線長より短い。
Description
本技術は、カメラに関し、詳しくは、ステレオ画像の撮像が可能なカメラに関する。
例えば、特許文献1には、単一の撮像素子を持つ構成でステレオ画像(左眼画像、右眼画像)を撮像するカメラが記載されている。また、特許文献2には、単一の撮像素子を持つ構成でステレオ画像(左眼画像、右眼画像)を撮像する際に、左眼画像と右眼画像を撮像素子の撮像面の異なる領域に結像させることが記載されている。
また、従来、ステレオ画像を撮像する際の基線長が長いほど高分解能で距離を求めることができることと、さらに、このように基線長を長くした場合には左眼画像と右眼画像の共通領域が狭くなり、近距離の領域で視差を求めることができなくなること、が知られている(例えば、特許文献3参照)。
本技術の目的は、高分解能で距離を求めることと近距離の領域で視差を求めることを両立可能とすることにある。
本技術の概念は、
撮像素子と、
上記撮像素子の撮像面の第1の領域に第1の基線長に係る左眼画像を結像させる第1の撮像光学系と、
上記撮像素子の撮像面の第2の領域に上記第1の基線長に係る右眼画像を結像させる第2の撮像光学系と、
上記撮像素子の撮像面の第3の領域に上記第1の基線長より短い第2の基線長に係る左眼画像を結像させる第3の撮像光学系と、
上記撮像素子の撮像面の第4の領域に上記第2の基線長に係る右眼画像を結像させる第4の撮像光学系を備える
カメラにある。
撮像素子と、
上記撮像素子の撮像面の第1の領域に第1の基線長に係る左眼画像を結像させる第1の撮像光学系と、
上記撮像素子の撮像面の第2の領域に上記第1の基線長に係る右眼画像を結像させる第2の撮像光学系と、
上記撮像素子の撮像面の第3の領域に上記第1の基線長より短い第2の基線長に係る左眼画像を結像させる第3の撮像光学系と、
上記撮像素子の撮像面の第4の領域に上記第2の基線長に係る右眼画像を結像させる第4の撮像光学系を備える
カメラにある。
本技術において、カメラは、撮像素子と、第1から第4の撮像光学系を備えている。第1の撮像光学系により、撮像素子の撮像面の第1の領域に第1の基線長に係る左眼画像が結像され、第2の撮像光学系により、撮像素子の撮像面の第2の領域に第1の基線長に係る右眼画像が結像される。また、第3の撮像光学系により、撮像素子の撮像面の第3の領域に第2の基線長に係る左眼画像が結像され、第4の撮像光学系により、撮像素子の撮像面の第4の領域に第2の基線長に係る右眼画像が結像される。ここで、第2の基線長は、第1の基線長より短くされる。
例えば、第1から第4の撮像光学系のそれぞれはロンボイドプリズムを含む、ようにされてもよい。この場合、例えば、第1から第4の撮像光学系に含まれるロンボイドプリズムは、それぞれ、出射面が撮像素子の撮像面の第1から第4の領域に当接するように配置される、ようにされてもよい。この場合、例えば、第1から第4の撮像光学系に含まれるロンボイドプリズムのそれぞれの少なくとも出射面側の反射面に対応した外面領域に遮光部材が設けられる、ようにされてもよい。また、例えば、撮像素子の撮像面の第1から第4の領域は、その撮像面が田の字状に分割されて得られた領域である、ようにされてもよい。
このように本技術においては、撮像素子の撮像面の第1の領域および第2の領域による撮像によって、基線長を比較的長くした場合のステレオ画像(左眼画像、右眼画像)を得ることができ、高分解能で距離を求めることが可能となり、また、撮像素子の撮像面の第3の領域および第4の領域による撮像によって、基線長を比較的短くした場合のステレオ画像(左眼画像、右眼画像)を得ることができ、この場合左眼画像と右眼画像の共通領域が広くなり、近距離の領域で視差を求めることが可能となる。
本技術によれば、高分解能で距離を求めることと近距離の領域で視差を求めることを両立できる。なお、ここに記載された効果は必ずしも限定されるものではなく、本開示中に記載されたいずれかの効果であってもよい。
以下、発明を実施するための形態(以下、「実施の形態」とする)について説明する。なお、説明は以下の順序で行う。
1.実施の形態
2.変形例
1.実施の形態
2.変形例
<1.実施の形態>
[カメラ]
図1、図2は、実施の形態としてのカメラ10の構成例を示している。図1は、カメラ10の概略的な斜視図を示し、図2は、カメラ10の概略的な正面図を示している。
[カメラ]
図1、図2は、実施の形態としてのカメラ10の構成例を示している。図1は、カメラ10の概略的な斜視図を示し、図2は、カメラ10の概略的な正面図を示している。
カメラ10は、撮像素子11と、第1の撮像光学系21と、第2の撮像光学系22と、第3の撮像光学系23と、第4の撮像光学系24を備えている。撮像素子(イメージャ)11は、例えば、CCD(Charged-coupled devices)イメージセンサやCMOS(Complementary metal-oxide-semiconductor)イメージセンサなどの個体撮像素子である。
この撮像素子11は、その撮像面111が複数の領域に分割され、それぞれの領域で異なる画像が撮像される。この実施の形態においては、撮像面111が田の字状に第1の領域111a、第2の領域111b、第3の領域111c、第4の領域111dに分割され、これら4つの領域でそれぞれ異なる画像が同時に撮像される。
第1の撮像光学系21は、撮像レンズ211と、ロンボイドプリズム(菱形プリズム)212を含む構成とされている。ロンボイドプリズム212は、その出射面212bが撮像素子11の撮像面111の第1の領域111aに当接するように配置されている。また、撮像レンズ211は、ロンボイドプリズム212の入射面212aに対向した位置に配置されている。
ロンボイドプリズム212の少なくとも出射面212bに対応した反射面212dの外面領域に遮光部材213が設けられている。この場合、ロンボイドプリズム212に対して、遮光シートの貼り付けや遮光塗料の塗布などによって、遮光部材213が設けられる。このように遮光部材213を設けるのは、この外面領域から入射する光による影響を抑制するためである。以下に述べる、他のロンボイドプリズムに設けられる遮光部材に関しても同様の理由による。
第2の撮像光学系22は、撮像レンズ221と、ロンボイドプリズム(菱形プリズム)222を含む構成とされている。ロンボイドプリズム222は、その出射面222bが撮像素子11の撮像面111の第2の領域111bに当接するように配置されている。この場合、ロンボイドプリズム222は、上述した第1の撮像光学系21のロンボイドプリズム212とは同一直線上で連続した状態となる。
また、撮像レンズ221は、ロンボイドプリズム222の入射面222aに対向した位置に配置されている。ロンボイドプリズム222の少なくとも出射面222bに対応した反射面222dの外面領域に遮光部材223が設けられている。
第1の撮像光学系21は、第1の基線長L1に係る左眼画像を、撮像素子11の撮像面111の第1の領域111aに結像させる。この場合、図3(a)に示すように、撮像レンズ211に入射される被写体からの光は、ロンボイドプリズム212の入射面212aから入射して反射面212cで反射され、さらにその後に反射面212dで反射され、出射面212bから出射されて、撮像素子11の撮像面111の第1の領域111aに到達し、この第1の領域111aに第1の基線長L1に係る左眼画像が結像される。
第2の撮像光学系22は、第1の基線長L1に係る右眼画像を、撮像素子11の撮像面111の第2の領域111bに結像させる。この場合、図3(a)に示すように、撮像レンズ221に入射される被写体からの光は、ロンボイドプリズム222の入射面222aから入射して反射面222cで反射され、さらにその後に反射面222dで反射され、出射面222bから出射されて、撮像素子11の撮像面111の第2の領域111bに到達し、この第2の領域111bに第1の基線長L1に係る右眼画像が結像される。
ここで、第1の基線長L1は、図2に示すように、撮像レンズ211,221の光軸間の距離となる。この第1の基線長L1は、第1の撮像光学系21のロンボイドプリズム212と第2の撮像光学系22のロンボイドプリズム222の長さによって決まる。換言すれば、この第1の基線長L1は、第1の撮像光学系21のロンボイドプリズム212と第2の撮像光学系22のロンボイドプリズム222の長さを変更することで、調整できる。
第3の撮像光学系23は、撮像レンズ231と、ロンボイドプリズム(菱形プリズム)232を含む構成とされている。ロンボイドプリズム232は、その出射面232bが撮像素子11の撮像面111の第3の領域111cに当接するように配置されている。この場合、ロンボイドプリズム232は、上述した第1の撮像光学系21のロンボイドプリズム212と隣接して並んだ状態となる。また、撮像レンズ231は、ロンボイドプリズム232の入射面232aに対向した位置に配置されている。ロンボイドプリズム232の少なくとも出射面232bに対応した反射面232dの外面領域に遮光部材233が設けられている。
第4の撮像光学系24は、撮像レンズ241と、ロンボイドプリズム(菱形プリズム)242を含む構成とされている。ロンボイドプリズム242は、その出射面242bが撮像素子11の撮像面111の第4の領域111dに当接するように配置されている。ここで、ロンボイドプリズム242は、上述した第3の撮像光学系23のロンボイドプリズム232とは同一直線上で連続した状態となると共に、上述した第2の撮像光学系22のロンボイドプリズム222と隣接して並んだ状態となる。
また、撮像レンズ241は、ロンボイドプリズム242の入射面242aに対向した位置に配置されている。ロンボイドプリズム242の少なくとも出射面242bに対応した反射面242dの外面領域に遮光部材243が設けられている。
第3の撮像光学系23は、第2の基線長L2に係る左眼画像を、撮像素子11の撮像面111の第3の領域111cに結像させる。ここで、第2の基線長L2は、上述した第1の基線長L1より短く設定されている。この場合、図3(b)に示すように、撮像レンズ231に入射される被写体からの光は、ロンボイドプリズム232の入射面232aから入射して反射面232cで反射され、さらにその後に反射面232dで反射され、出射面232bから出射されて、撮像素子11の撮像面111の第3の領域111cに到達し、この第3の領域111cに第2の基線長L2に係る左眼画像が結像される。
第4の撮像光学系24は、第2の基線長L2に係る右眼画像を、撮像素子11の撮像面111の第4の領域111dに結像させる。この場合、図3(b)に示すように、撮像レンズ241に入射される被写体からの光は、ロンボイドプリズム242の入射面242aから入射して反射面242cで反射され、さらにその後に反射面242dで反射され、出射面242bから出射されて、撮像素子11の撮像面111の第4の領域111dに到達し、この第4の領域111dに第2の基線長L2に係る右眼画像が結像される。
ここで、第2の基線長L2は、図2に示すように、撮像レンズ231,241の光軸間の距離となる。この第2の基線長L2は、第3の撮像光学系23のロンボイドプリズム232と第4の撮像光学系24のロンボイドプリズム242の長さによって決まる。換言すれば、この第2の基線長L2は、第3の撮像光学系23のロンボイドプリズム232と第4の撮像光学系24のロンボイドプリズム242の長さを変更することで、調整できる。
以上説明したように、図1、図2に示すカメラ10においては、撮像素子11の撮像面111の第1の領域111aおよび第2の領域111bによる撮像によって、基線長を比較的長くした場合のステレオ画像(左眼画像、右眼画像)を得ることができ、高分解能で距離を求めることが可能となる。
また、図1、図2に示すカメラ10においては、撮像素子11の撮像面111の第3の領域111cおよび第4の領域111dによる撮像によって、基線長を比較的短くした場合のステレオ画像(左眼画像、右眼画像)を得ることができ、この場合左眼画像と右眼画像の共通領域が広くなり、近距離の領域で視差を求めることが可能となる。
図4(a)は、第1の撮像光学系21により撮像素子11の第1の領域111aで撮像される左眼画像と第2の撮像光学系22により撮像素子11の第2の領域111bで撮像される右眼画像の撮像領域を示している。この場合、第1の基線長L1が比較的長いことから、左眼画像と右眼画像の共通領域が狭くなり、近距離の領域で視差を求めることが難しくなる。図5(b)は、図5(a)のような被写体を第1の基線長L1で撮像した場合における左眼画像IFLと右眼画像IFRのイメージを示している。
これに対して、図4(b)は、第3の撮像光学系23により撮像素子11の第3の領域111cで撮像される左眼画像と第4の撮像光学系24により撮像素子11の第4の領域111dで撮像される右眼画像の撮像領域を示している。この場合、第2の基線長L2が比較的短いことから、左眼画像と右眼画像の共通領域が広くなり、近距離の領域で視差を求めることが可能となる。図5(c)は、図5(a)のような被写体を第2の基線長L2で撮像した場合における左眼画像INLと右眼画像INRのイメージを示している。
「車両制御システム」
図6は、車両制御システム300の構成例を示している。この車両制御システム300は、図1に示したカメラ10を含み、各部はCANバスを介して相互接続されている。
図6は、車両制御システム300の構成例を示している。この車両制御システム300は、図1に示したカメラ10を含み、各部はCANバスを介して相互接続されている。
車載カメラ100は、例えば車両のウインドシールドの内側のルームミラーの近傍に配置され、車両進行方向の前方を撮像する。車載カメラ100の撮像画像は、基本的にセンシング目的に使用され、撮像画像に対して画像認識などの画像処理を適用して、道路の白線(レーン)や信号機、道路標識、対向車、自車両周辺の歩行者などを検出することを想定している。ただし、車載カメラ100の撮像画像をビューイング目的にも使用し、車室内で画像を表示するようにしてもよい。
車載カメラ100は、撮像光学系101と、撮像素子102と、画像処理回路103と、通信処理回路104を備えている。図1に示したカメラ10は、撮像光学系101および撮像素子102の部分に対応する。
撮像素子102は、撮像画像信号を、例えばシリアル通信により画像処理回路103に出力する。画像処理回路103は、例えばECU(Electronic Control Unit)で構成される。画像処理回路103内では、撮像画像信号に基づき、画像処理や認識処理、さらには測距処理を実施する。
画像処理回路103内で実施する画像処理として、AE(Automatic Exposure:自動露出制御)、AWB(Auto White Balance:自動ホワイト・バランス調整)、HDR(High Dynamic Range:ハイダイナミックレンジ合成)などの処理を挙げることができる。ただし、これらの画像処理は撮像素子102側で行なうようにすることもできる。
また、画像処理回路103内で実施する認識処理として、道路の白線(レーン)検出(Lane Detection)、歩行者検出(Pedestrian Detection)、周辺車両の検出(Vehicle Detection)、対向車両が点灯するヘッドライトの検出(Headlight Detection)、先行車両のブレーキライトの点灯検出(Automatic Emergency Breaking)、信号機認識(Traffic Sign Recognition)などを行なう。
また、画像処理回路103内で実施する測距処理として、上述したように認識処理で認識された物体(歩行者や周辺車両など)までの距離測定などを行う。
図7は、画像処理回路103における物体認識処理と認識された物体までの距離測定処理を行う処理部130の構成例を示している。この処理部130は、画像分割部131と、歪補正部132と、視差算出部133と、物体認識部134と、距離演算部135を有している。
画像分割部131には、撮像素子102(図1の撮像素子11に対応)で得られた撮像画像信号が供給される。この撮像画像信号には、撮像面111の第1の領域111aから得られる第1の基線長L1に係る左眼画像FLの画像信号Sflが含まれると共に、撮像面111の第2の領域111bから得られる第1の基線長L1に係る右眼画像FRの画像信号Sfrが含まれる。
また、この撮像画像信号には、撮像面111の第3の領域111cから得られる第2の基線長L2に係る左眼画像NLの画像信号Snlが含まれると共に、撮像面111の第4の領域111dから得られる第2の基線長L2に係る右眼画像NRの画像信号Snrが含まれる。
画像分割部131は、撮像画像信号から、画像信号Sfl、画像信号Sfr、画像信号Snlおよび画像信号Snrのそれぞれを抽出して出力する。ここで、例えば、撮像素子102(撮像素子11)が4K解像度の撮像素子である場合、撮像画像信号は4K解像度の画像信号であり、画像信号Sfl、画像信号Sfr、画像信号Snlおよび画像信号Snrのそれぞれは2K(HD)解像度の画像信号である。
画像分割部131から出力される画像信号Sfl、画像信号Sfr、画像信号Snlおよび画像信号Snrは、歪補正部132に供給される。歪補正部132は、光学系の歪を補正して、画像信号Sflおよび画像信号Sfrのペアと画像信号Snlおよび画像信号Snrのペアのそれぞれのペア間の平行化を補正する。この補正は、それぞれのペアを、2つのピンホールカメラが平行に取り付けられたときに得られる理想的な平行化ステレオ画像信号に変換する補正である。
歪補正部132で歪補正された画像信号Sfl、画像信号Sfr、画像信号Snlおよび画像信号Snrは、視差算出部133に供給される。視差算出部133は、画像信号Sflおよび画像信号Sfrから第1の基線長L1に係る第1の視差マップDMfを生成する。この場合、例えば、画像信号Sflを基準画像として、画素毎に、画像信号Sfrとの間のマッチング処理を行って視差情報を得ることで、第1の視差マップDMfが生成される。
また、視差算出部133は、画像信号Snlおよび画像信号Snrから第2の基線長L2に係る第2の視差マップDMnを生成する。この場合、例えば、画像信号Snlを基準画像として、画素毎に、画像信号Snrとの間のマッチング処理を行って視差情報を得ることで、第2の視差マップDMnが生成される。
歪補正部132で歪補正された画像信号Sflおよび画像信号Snlは、物体認識部134に供給される。物体認識部134は、第1の基線長L1に係る画像信号Sflに基づいて、周知の物体認識技術を用いて、物体(歩行者や周辺車両など)を認識し、認識した各物体の種類を示す情報TYfと画像内の位置情報PSfを認識結果として出力する。また、物体認識部134は、第2の基線長L2に係る画像信号Snlに基づいて、周知の物体認識技術を用いて、物体(歩行者や周辺車両など)を認識し、認識した各物体の種類を示す情報TYnと画像内の位置情報PSnを認識結果として出力する。
距離演算部135には、視差算出部133で生成された第1の基線長L1に係る第1の視差マップDMfと物体認識部134で得られた第1の基線長L1に係る画像信号Sflに基づいて認識された各物体の画像内の位置情報PSfが供給される。距離演算部135は、各物体までの距離を算出して距離情報DSfを出力する。この場合、距離演算部135は、認識された物体毎に、その物体の画像内の位置情報PSfを参照して第1の視差マップDMfからその物体に対応した視差を取得し、その視差を用いて従来周知のように三角測量の原理からその物体までの距離を算出する。
また、距離演算部135には、視差算出部133で生成された第2の基線長L2に係る第2の視差マップDMnと物体認識部134で得られた第2の基線長L2に係る画像信号Snlに基づいて認識された各物体の画像内の位置情報PSnが供給される。距離演算部135は、各物体までの距離を算出して距離情報DSnを出力する。この場合、距離演算部135は、認識された物体毎に、その物体の画像内の位置情報PSnを参照して第2の視差マップDMnからその物体に対応した視差を取得し、その視差を用いて従来周知のように三角測量の原理からその物体までの距離を算出する。
このように、処理部130では、第1の基線長L1に係る画像信号Sflから物体(歩行者や周辺車両など)が認識され、認識された各物体の種類を示す情報TYfと画像内の位置情報PSf、さらに認識された各物体までの距離を示す距離情報DSfが得られる。また、この処理部130では、第2の基線長L2に係る画像信号Snlから物体(歩行者や周辺車両など)が認識され、認識された各物体の種類を示す情報TYnと画像内の位置情報PSn、さらに認識された各物体までの距離を示す距離情報DSnが得られる。
図6に戻って、通信処理回路104は、例えばMCU(Micro Control Unit)で構成される。通信処理回路104は、制御システム300におけるCAN通信とのインターフェースであり、CAN通信における信号形式と車載カメラ100内部の信号形式との形式変換を行なう。画像処理回路103による上記の各検出・認識結果は、通信処理回路104を介して、車両の制御システム300へ送出される。
車両の制御システム300側の通信処理部(Communication Unit)301は、車車間通信、歩車間通信、路車間通信、さらには車載カメラ100との通信において、データの送受信を担う。通信処理部301は、さらにサーバー(図示しない)とのやり取りも行なう。通信処理部301は各種の無線通信を適用可能であるものとする。
自動運転制御部(Self Driving ECU)302は、CPU(Central Processing Unit)、ISP(Image Signal Processor)、GPU(Graphic Processing Unit)などで構成されるECUであり、車両の自動運転を司る。例えば、車載カメラ100による撮像画像をGPUで画像認識した結果を、通信処理部301を介してサーバーに送り、ディープ・ニューラル・ネットなどサーバーによるディープ・ラーニングを実行して学習結果を受け取ることもできる。
運転支援制御部(ADAS ECU)303は、CAN通信を介して車両の各コンポーネントと信号の送受信を行なうことができる。運転支援制御部303は、ドライバーの運転操作や、車載カメラ100による撮像画像の認識結果などに応じて、車両の各コンポーネントを制御するための制御信号を生成して、CAN通信を介して送る。
ステアリング304、ヘッドランプ305、ブレーキ306、エンジン307、並びにモーター308は、自動運転制御部302や運転支援制御部303による制御対象となる車両のコンポーネントである。但し、図6に示した以外にも、制御対象となり得る車両のコンポーネントが存在するものと理解されたい。
例えば、運転支援制御部303は、車載カメラ100の撮像画像の画像認識により、自車両が白線から逸脱しそうになったことを検出すると、ステアリング304に対して、EPS(Electronic Power Steering)モーターを駆動するための制御信号を送出する。また、運転支援制御部303は、車載カメラ100の撮像画像の画像認識により、対向車のヘッドライトの有無を検知して、ヘッドランプ305のハイビームとロービームの切り替えを行なう。または、対向車を避けるようなハイビームを照射させる。
車載カメラ100内の画像処理回路103は、認識処理として、画像情報そのものを出力するのではなく、認識したセンシング情報すなわち画像認識による検出結果のみを出力するようにしてもよい。幾つかのセンシング情報を以下に例示しておく。
・Pedestrian Detection for Forward Collision Warning(FCW):自車両前方の歩行者との衝突までの時間を複数出力する。
・Automatic Emergency Breaking(AEB):先行車両のブレーキライトの点灯を検出する。
・Vehicle Detection for FCW/AEB
・Lane Departure Warning(LDW):エッジ検出によりレーンを検出する。レーンの他、路肩や縁石も検出することができる。但し、ウィンカー作動中は警告しない。
・Traffic Jam Pilot(TJP):ミリ波レーダーとの融合により実現する。例えば、先行車両の存在有無に応じて車速を制御したり、制限速度に関する道路標識を認識して車速を制御したり、高速道路の入口や出口の道路標識で認識して車速を制御したり、自車両がカーブに差し掛かったときに自動で減速したりする。
・Lane Keeping Aid(LKA):TJPで実施される。
・Vision Only Adaptive Cruise Control(VOACC):TJPで実施される。
・Vision Only Traffic Sign Recognition(VOTSR):TJPで実施される。高速道路の入口と出口を道路標識(例えば、「自動車専用道路」という標識を識別)を認識して判別する。高速道路では、速度制限に関する道路標識を認識して、車速を自動制御する。
・Intelligent Head Ramp Control(IHC):対向車のヘッドライトの有無を検知して、自車両のヘッドランプのハイビームとロービームの切り替えを行なう。また、先行車両のテールランプの有無を検出して、自車両のヘッドランプのハイビームとロービームの切り替えを行なう。また、光源が左右どちらのレーンにあるかを判別して、対向車や先行車両を避けるようなハイビームを照射させる。
・Automatic Emergency Breaking(AEB):先行車両のブレーキライトの点灯を検出する。
・Vehicle Detection for FCW/AEB
・Lane Departure Warning(LDW):エッジ検出によりレーンを検出する。レーンの他、路肩や縁石も検出することができる。但し、ウィンカー作動中は警告しない。
・Traffic Jam Pilot(TJP):ミリ波レーダーとの融合により実現する。例えば、先行車両の存在有無に応じて車速を制御したり、制限速度に関する道路標識を認識して車速を制御したり、高速道路の入口や出口の道路標識で認識して車速を制御したり、自車両がカーブに差し掛かったときに自動で減速したりする。
・Lane Keeping Aid(LKA):TJPで実施される。
・Vision Only Adaptive Cruise Control(VOACC):TJPで実施される。
・Vision Only Traffic Sign Recognition(VOTSR):TJPで実施される。高速道路の入口と出口を道路標識(例えば、「自動車専用道路」という標識を識別)を認識して判別する。高速道路では、速度制限に関する道路標識を認識して、車速を自動制御する。
・Intelligent Head Ramp Control(IHC):対向車のヘッドライトの有無を検知して、自車両のヘッドランプのハイビームとロービームの切り替えを行なう。また、先行車両のテールランプの有無を検出して、自車両のヘッドランプのハイビームとロービームの切り替えを行なう。また、光源が左右どちらのレーンにあるかを判別して、対向車や先行車両を避けるようなハイビームを照射させる。
<2.変形例>
なお、上述実施の形態においては、本技術をカメラは、車の他に船舶、航空機、移動ロボットなどさまざまな移動体装置に搭載するカメラにも適用することができる。
なお、上述実施の形態においては、本技術をカメラは、車の他に船舶、航空機、移動ロボットなどさまざまな移動体装置に搭載するカメラにも適用することができる。
また、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
また、本技術は、以下のような構成を取ることもできる。
(1)撮像素子と、
上記撮像素子の撮像面の第1の領域に第1の基線長に係る左眼画像を結像させる第1の撮像光学系と、
上記撮像素子の撮像面の第2の領域に上記第1の基線長に係る右眼画像を結像させる第2の撮像光学系と、
上記撮像素子の撮像面の第3の領域に上記第1の基線長より短い第2の基線長に係る左眼画像を結像させる第3の撮像光学系と、
上記撮像素子の撮像面の第4の領域に上記第2の基線長に係る右眼画像を結像させる第4の撮像光学系を備える
カメラ。
(2)上記第1から第4の撮像光学系のそれぞれはロンボイドプリズムを含む
前記(1)に記載のカメラ。
(3)上記第1から第4の撮像光学系に含まれるロンボイドプリズムは、それぞれ、出射面が上記撮像素子の撮像面の上記第1から第4の領域に当接するように配置される
前記(2)に記載のカメラ。
(4)上記第1から第4の撮像光学系に含まれるロンボイドプリズムのそれぞれの少なくとも上記出射面側の反射面に対応した外面領域に遮光部材が設けられる
前記(3)に記載のカメラ。
(5)上記撮像素子の撮像面の上記第1から第4の領域は、該撮像面が田の字状に分割されて得られた領域である
前記(1)から(4)のいずれかに記載のカメラ。
(1)撮像素子と、
上記撮像素子の撮像面の第1の領域に第1の基線長に係る左眼画像を結像させる第1の撮像光学系と、
上記撮像素子の撮像面の第2の領域に上記第1の基線長に係る右眼画像を結像させる第2の撮像光学系と、
上記撮像素子の撮像面の第3の領域に上記第1の基線長より短い第2の基線長に係る左眼画像を結像させる第3の撮像光学系と、
上記撮像素子の撮像面の第4の領域に上記第2の基線長に係る右眼画像を結像させる第4の撮像光学系を備える
カメラ。
(2)上記第1から第4の撮像光学系のそれぞれはロンボイドプリズムを含む
前記(1)に記載のカメラ。
(3)上記第1から第4の撮像光学系に含まれるロンボイドプリズムは、それぞれ、出射面が上記撮像素子の撮像面の上記第1から第4の領域に当接するように配置される
前記(2)に記載のカメラ。
(4)上記第1から第4の撮像光学系に含まれるロンボイドプリズムのそれぞれの少なくとも上記出射面側の反射面に対応した外面領域に遮光部材が設けられる
前記(3)に記載のカメラ。
(5)上記撮像素子の撮像面の上記第1から第4の領域は、該撮像面が田の字状に分割されて得られた領域である
前記(1)から(4)のいずれかに記載のカメラ。
10・・・カメラ
11・・・撮像素子
21・・・第1の撮像光学系
22・・・第2の撮像光学系
23・・・第3の撮像光学系
24・・・第4の撮像光学系
111・・・撮像面
111a・・・第1の領域
111b・・・第2の領域
111c・・・第3の領域
111d・・・第4の領域
211,221,231,241・・・撮像レンズ
212,222,232,242・・・ロンボイドプリズム
212a,222a,232a,242a・・・入射面
212b,222b,232b,242b・・・出射面
212c,212d,222c,222d,232c,232d,242c,242d・・・反射面
213,223,233,243・・・遮光部材
100・・・車載カメラ
101・・・撮像光学系
102・・・撮像素子
103・・・画像処理回路
104・・・通信処理回路
131・・・画像分割部
132・・・歪補正部
133・・・視差算出部
134・・・物体認識部
135・・・距離算出部
300・・・車両制御システム
301・・・通信処理部
302・・・自動運転制御部
303・・・運転支援制御部
304・・・ステアリング
305・・・ヘッドランプ
306・・・ブレーキ
307・・・エンジン
308・・・モーター
11・・・撮像素子
21・・・第1の撮像光学系
22・・・第2の撮像光学系
23・・・第3の撮像光学系
24・・・第4の撮像光学系
111・・・撮像面
111a・・・第1の領域
111b・・・第2の領域
111c・・・第3の領域
111d・・・第4の領域
211,221,231,241・・・撮像レンズ
212,222,232,242・・・ロンボイドプリズム
212a,222a,232a,242a・・・入射面
212b,222b,232b,242b・・・出射面
212c,212d,222c,222d,232c,232d,242c,242d・・・反射面
213,223,233,243・・・遮光部材
100・・・車載カメラ
101・・・撮像光学系
102・・・撮像素子
103・・・画像処理回路
104・・・通信処理回路
131・・・画像分割部
132・・・歪補正部
133・・・視差算出部
134・・・物体認識部
135・・・距離算出部
300・・・車両制御システム
301・・・通信処理部
302・・・自動運転制御部
303・・・運転支援制御部
304・・・ステアリング
305・・・ヘッドランプ
306・・・ブレーキ
307・・・エンジン
308・・・モーター
Claims (5)
- 撮像素子と、
上記撮像素子の撮像面の第1の領域に第1の基線長に係る左眼画像を結像させる第1の撮像光学系と、
上記撮像素子の撮像面の第2の領域に上記第1の基線長に係る右眼画像を結像させる第2の撮像光学系と、
上記撮像素子の撮像面の第3の領域に上記第1の基線長より短い第2の基線長に係る左眼画像を結像させる第3の撮像光学系と、
上記撮像素子の撮像面の第4の領域に上記第2の基線長に係る右眼画像を結像させる第4の撮像光学系を備える
カメラ。 - 上記第1から第4の撮像光学系のそれぞれはロンボイドプリズムを含む
請求項1に記載のカメラ。 - 上記第1から第4の撮像光学系に含まれるロンボイドプリズムは、それぞれ、出射面が上記撮像素子の撮像面の上記第1から第4の領域に当接するように配置される
請求項2に記載のカメラ。 - 上記第1から第4の撮像光学系に含まれるロンボイドプリズムのそれぞれの少なくとも上記出射面側の反射面に対応した外面領域に遮光部材が設けられる
請求項3に記載のカメラ。 - 上記撮像素子の撮像面の上記第1から第4の領域は、該撮像面が田の字状に分割されて得られた領域である
請求項1に記載のカメラ。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018128156 | 2018-07-05 | ||
| JP2018-128156 | 2018-07-05 | ||
| JP2018-158488 | 2018-08-27 | ||
| JP2018158488A JP2020013096A (ja) | 2018-07-05 | 2018-08-27 | カメラ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020009172A1 true WO2020009172A1 (ja) | 2020-01-09 |
Family
ID=69060853
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/026541 WO2020009172A1 (ja) | 2018-07-05 | 2019-07-03 | カメラ |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2020009172A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112887534A (zh) * | 2021-01-14 | 2021-06-01 | 维沃移动通信有限公司 | 电子设备及其控制方法和控制装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001222083A (ja) * | 2000-02-07 | 2001-08-17 | Canon Inc | 撮像装置、撮像装置の制御方法、及び制御方法が記載されたプログラムをコンピュータに供給する媒体 |
| JP2010243463A (ja) * | 2009-04-10 | 2010-10-28 | Ricoh Co Ltd | ステレオカメラ装置及び車外監視装置 |
| JP2012220848A (ja) * | 2011-04-12 | 2012-11-12 | Nikon Corp | 撮像装置及びレンズ装置 |
-
2019
- 2019-07-03 WO PCT/JP2019/026541 patent/WO2020009172A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001222083A (ja) * | 2000-02-07 | 2001-08-17 | Canon Inc | 撮像装置、撮像装置の制御方法、及び制御方法が記載されたプログラムをコンピュータに供給する媒体 |
| JP2010243463A (ja) * | 2009-04-10 | 2010-10-28 | Ricoh Co Ltd | ステレオカメラ装置及び車外監視装置 |
| JP2012220848A (ja) * | 2011-04-12 | 2012-11-12 | Nikon Corp | 撮像装置及びレンズ装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112887534A (zh) * | 2021-01-14 | 2021-06-01 | 维沃移动通信有限公司 | 电子设备及其控制方法和控制装置 |
| US12055978B2 (en) | 2021-01-14 | 2024-08-06 | Vivo Mobile Communication Co., Ltd. | Electronic device, control method thereof and control apparatus thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10746874B2 (en) | Ranging module, ranging system, and method of controlling ranging module | |
| CN107615749B (zh) | 信号处理装置和成像装置 | |
| JP5680573B2 (ja) | 車両の走行環境認識装置 | |
| US10331963B2 (en) | Camera apparatus and in-vehicle system capturing images for vehicle tasks | |
| US11539868B2 (en) | Imaging system and vehicle window used for the same | |
| CN110603458B (zh) | 光学传感器和电子设备 | |
| WO2017145945A1 (ja) | ステレオカメラ装置、車両および視差算出方法 | |
| US10848660B2 (en) | Imaging apparatus, imaging module, and control method of imaging apparatus | |
| JP2020136958A (ja) | イベント信号検出センサ及び制御方法 | |
| JP2009146217A (ja) | ステレオカメラ装置 | |
| US10882464B2 (en) | Vehicle-mounted camera, vehicle-mounted camera apparatus, and method of supporting vehicle-mounted camera | |
| US10750085B2 (en) | Camera device for capturing a surrounding area of a driver's own vehicle and method for providing a driver assistance function | |
| CN110073652B (zh) | 成像装置以及控制成像装置的方法 | |
| EP3667413A1 (en) | Stereo image processing device | |
| JP6699344B2 (ja) | 逆走車検出装置、逆走車検出方法 | |
| WO2020009172A1 (ja) | カメラ | |
| JP2017129543A (ja) | ステレオカメラ装置及び車両 | |
| EP2674893A2 (en) | Travelable area recognition system, travelable area recognition method, travelable area recognition program executed on the travelable area recognition system, and recording medium storing travelable area recognition program | |
| JP2013250694A (ja) | 画像処理装置 | |
| US20210291750A1 (en) | Vehicle-mounted camera and drive control system using vehicle-mounted camera | |
| CN115179863A (zh) | 移动体的控制装置及控制方法、存储介质以及车辆 | |
| JP2020013096A (ja) | カメラ | |
| CN113661700B (zh) | 成像装置与成像方法 | |
| JP4900377B2 (ja) | 画像処理装置 | |
| JP2013161187A (ja) | 物体認識装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19830555 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19830555 Country of ref document: EP Kind code of ref document: A1 |