WO2019117228A1 - Image processing system, inspection system, image processing method, and program - Google Patents
Image processing system, inspection system, image processing method, and program Download PDFInfo
- Publication number
- WO2019117228A1 WO2019117228A1 PCT/JP2018/045791 JP2018045791W WO2019117228A1 WO 2019117228 A1 WO2019117228 A1 WO 2019117228A1 JP 2018045791 W JP2018045791 W JP 2018045791W WO 2019117228 A1 WO2019117228 A1 WO 2019117228A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- light emission
- solar battery
- battery cell
- image processing
- Prior art date
Links
- 238000007689 inspection Methods 0.000 title claims abstract description 141
- 238000012545 processing Methods 0.000 title claims abstract description 131
- 238000003672 processing method Methods 0.000 title claims abstract description 20
- 230000005540 biological transmission Effects 0.000 claims abstract description 92
- 230000005284 excitation Effects 0.000 claims abstract description 17
- 238000003384 imaging method Methods 0.000 claims description 75
- 238000012937 correction Methods 0.000 claims description 60
- 238000005424 photoluminescence Methods 0.000 claims description 60
- 238000013528 artificial neural network Methods 0.000 claims description 25
- 238000003776 cleavage reaction Methods 0.000 claims description 22
- 230000007017 scission Effects 0.000 claims description 22
- 238000005286 illumination Methods 0.000 claims description 20
- 238000000034 method Methods 0.000 claims description 19
- 230000008569 process Effects 0.000 claims description 19
- 238000005401 electroluminescence Methods 0.000 claims description 12
- 238000013135 deep learning Methods 0.000 claims description 10
- 238000004020 luminiscence type Methods 0.000 claims description 9
- 238000010801 machine learning Methods 0.000 claims description 6
- 238000005530 etching Methods 0.000 abstract description 18
- 230000005855 radiation Effects 0.000 abstract 1
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 11
- 230000006870 function Effects 0.000 description 10
- 238000005299 abrasion Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000012706 support-vector machine Methods 0.000 description 5
- 239000013078 crystal Substances 0.000 description 4
- 239000000284 extract Substances 0.000 description 4
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 4
- 238000011176 pooling Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000000605 extraction Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- 238000013527 convolutional neural network Methods 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 2
- 239000012466 permeate Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 229910021417 amorphous silicon Inorganic materials 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 125000005842 heteroatom Chemical group 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 238000000275 quality assurance Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S50/00—Monitoring or testing of PV systems, e.g. load balancing or fault identification
- H02S50/10—Testing of PV devices, e.g. of PV modules or single PV cells
- H02S50/15—Testing of PV devices, e.g. of PV modules or single PV cells using optical means, e.g. using electroluminescence
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
Definitions
- the present disclosure relates to an image processing system, an inspection system, an image processing method, and a program. More particularly, the present disclosure relates to an image processing system, an inspection system, an image processing method, and a program for inspecting a crack of a solar cell based on an image of the solar cell.
- the inspection apparatus of Patent Document 1 captures an image by transmitting an infrared ray transmitted to the back surface of the polycrystalline silicon wafer and an image reflected by the infrared light irradiated to the front surface of the polycrystalline silicon wafer, and captures the transmitted light The image data by and the image data by the reflected light are compared. Then, the inspection apparatus determines the presence or absence of the internal crack of the polycrystalline silicon wafer based on the comparison result of the image data by the transmitted light and the image data by the reflected light.
- etching unevenness of a silicon wafer may be erroneously determined to be a crack in some cases, and improvement in crack detection accuracy has been desired.
- the present disclosure is an image processing system and inspection system capable of accurately determining a crack of a solar battery cell based on a captured image of a solar battery cell and accurately distinguishing the crack and other elements such as etching unevenness.
- An object of the present invention is to provide an image processing method and program.
- An image processing system is an image processing system for inspecting a crack of the solar battery cell based on an image of the solar battery cell.
- the image processing system includes a first acquisition unit, a second acquisition unit, and an image processing apparatus.
- the first acquisition unit acquires information of a transmission image which is an image of the solar battery cell by transmitted light transmitted through the solar battery cell.
- the second acquisition unit acquires information of a light emission image which is an image of the solar battery cell by the light emission of the solar battery cell.
- the image processing apparatus receives the information of the transmission image and each information of the light emission image and performs image processing to determine whether the crack is generated in the solar battery cell.
- An inspection system includes an imaging unit, a first illumination device, a light emission generation device, and the above-described image processing system.
- the imaging unit images a solar battery cell.
- the first lighting device emits illumination light to the solar battery cell to generate transmission light in which the illumination light is transmitted through the solar battery cell.
- the light emitting device causes the solar cell to emit light.
- the imaging unit receives the transmitted light, outputs information of a transmitted image to the image processing system, receives the light emission, and outputs information of a light emission image to the image processing system.
- An image processing method is an image processing method for inspecting a crack of the solar battery cell based on an image of the solar battery cell.
- the image processing method includes an acquisition step and an image processing step.
- the acquiring step acquires information of a transmission image which is an image of the solar battery cell by transmitted light which has been transmitted through the solar battery cell, and information of a light emission image which is an image of the solar battery cell by light emission of the solar battery cell To get
- the image processing step receives the information of the transmission image and each information of the light emission image and performs image processing to determine whether the crack is generated in the solar battery cell.
- a program according to an aspect of the present disclosure causes a computer system to execute the above-described image processing method.
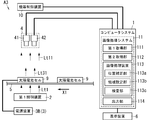
- FIG. 1 is a block diagram showing the configuration of an inspection system provided with the image processing system of the embodiment.
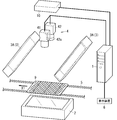
- FIG. 2 is a schematic view showing the inspection system of the same.
- FIG. 3 is a plan view showing the light receiving surface of the above solar cell.
- FIG. 4 is a view showing a crack area of the above solar cell.
- FIG. 5A is a view showing a gray-scale image (transmission image, PL light emission image) of the solar battery cell of the above.
- FIG. 5B is a view showing a binary image obtained by binarizing the grayscale image of the same.
- FIG. 6 is a view showing a corrected gray-scale image (corrected transmission image, corrected PL light emission image) after position correction of the same.
- FIG. 7 is a diagram showing a setting example of candidate areas and inspection areas in the corrected gray-scale image of the same.
- FIG. 8A is a diagram showing a setting example of an inspection area in the corrected transmission image of the same as above.
- FIG. 8B is a diagram showing a setting example of an inspection area in the corrected PL light emission image of the same as above.
- FIG. 9 is a schematic view showing the neural network of the same.
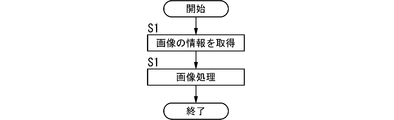
- FIG. 10 is a flow chart showing an image processing method of the same.
- FIG. 11 is a block diagram showing another configuration of the inspection system of the same.
- FIG. 12 is a block diagram showing another configuration of the inspection system of the same.
- the inspection system of a solar battery cell described below includes an image processing system that extracts a crack occurring in an inspection target by image processing technology using a computer.
- the inspection object is a single crystal material formed in a plate shape, and in particular, a solar battery cell in which single crystal silicon is stacked is assumed.
- the photovoltaic cell used as a test object has regularity in the direction which a crack produces, it is not essential that it is single-crystal material.
- FIG. 1 shows a block configuration of an inspection system A1 of the present embodiment.
- FIG. 2 shows a schematic configuration of the inspection system A1.
- the inspection system A1 mainly includes a computer system 1, a first illumination device 2, a light emission generation device 3 (second illumination device 3A), and an imaging unit 4.
- the inspection system A1 preferably further includes a transport device 5, a display device 6, and a device control device 10. And inspection system A1 performs a crack inspection of photovoltaic cell 9 as a defect inspection of photovoltaic cell 9.
- the solar battery cell 9 is a cell that constitutes a solar battery module. As shown in FIG. 3, the solar battery cell 9 is formed in a square plate shape (for example, a square shape having one side of about 125 mm). For the solar battery cell 9, for example, a hetero junction with intrinsic thin-layer (HIT) (registered trademark) solar cell is used. In the HIT solar cell, an amorphous silicon layer is formed on both sides of a single crystal silicon layer.
- the light receiving surface 91 of the solar battery cell 9 has a bluish color. Furthermore, on the light receiving surface 91 of the solar battery cell 9, a plurality of bus bar electrodes 92 are linearly formed in the vertical direction (vertical direction in FIG.
- the bus bar electrode 92 and the finger electrode 93 are wirings which flow a current generated by sunlight, and are formed of silver paste or aluminum paste or the like, and the surface has a silver color.
- the location of the crack becomes dark.
- the cracks generated in the single crystal silicon layer have regularity in the direction in which the cracks are generated, and are generated linearly and only in a certain direction. Therefore, in a defect inspection that determines the presence or absence of a crack using a gray image obtained by imaging the solar battery cell 9, in general, the presence or absence of a crack is determined based on the gray value of the pixel, the direction, and the sharpness of the line. .
- the solar battery cell 9 of the present embodiment is provided with a single crystal silicon layer, there is a high possibility that a crack is generated in the direction of cleavage of the single crystal silicon layer inside the solar battery cell 9.
- the single crystal silicon layer of the solar battery cell 9 is as thin as 500 ⁇ m or less in thickness dimension, and the crack inspection is effective from the viewpoint of quality assurance.
- the photovoltaic cell 9 determined that the crack has arisen is classified into inferior goods.
- Cleavage refers to a state in which a crystal such as a single crystal silicon layer is broken along one of the crystallographic directions (plane directions of cleavage planes).
- the direction of cleavage is the surface direction of the cleavage surface, and is the direction in which the crack extends.
- a mineral having multiple cleavage planes has multiple cleavage directions, and cracks develop along at least one of the multiple cleavage directions.
- FIG. 4 is an enlarged view of a part of the light receiving surface 91 of the solar battery cell 9.
- the crack 8 is generated in the solar battery cell 9, and the crack 8 extends along the cleavage direction of the single crystal silicon layer.
- the crack 8 has a linear shape, and the direction in which the crack 8 extends is approximately 45 degrees (or 225 degrees) with respect to the direction (horizontal direction) in which the finger electrode 93 extends in a plane parallel to the light receiving surface 91 (first Direction), or an angle of 135 degrees (or 315 degrees) (second direction) is likely to be made.
- the area where the crack 8 is imaged (crack area) is also linear like the crack 8 and the direction in which the crack area extends is approximately 45 degrees (or 225 degrees) with respect to the horizontal direction Or the possibility of forming an angle of 135 degrees (or 315 degrees) is high. That is, the direction in which the gray value changes can be used as the information for determining the crack area.
- the solar battery cell 9 is moved by the transport device 5 below the second lighting device 3A and the imaging unit 4 and above the first lighting device 2 in the forward direction X1 from the rear to the first lighting, as shown in FIG.
- Each lighting process by the device 2 and the second lighting device 3A and an imaging process by the imaging unit 4 are performed.
- the conveying device 5 is configured of, for example, a belt conveyor device.
- the conveying device 5 includes a motor, a pulley, a conveyor belt, and the like, and the rotational driving force of the motor is transmitted to the conveyor belt via the pulley and the like.
- the solar cells 9 placed on the conveyor belt advance in the traveling direction X1 and temporarily stop at a predetermined inspection position (immediately below the imaging unit 4), and after a crack inspection is performed, the traveling direction X1 And the next photovoltaic cell 9 is temporarily stopped at the inspection position.
- the light receiving surface 91 of the solar cells 9 mounted on the conveyor belt is directed upward. Further, the upper and lower sides of the transfer device 5 are arranged such that illumination light of the first illumination device 2 disposed below the transfer device 5 is irradiated from below to the solar battery cells 9 stopped at the inspection position. An opening communicating with the direction is provided.
- the solar cell 9 may be fixed, and the first lighting device 2, the second lighting device 3A, and the imaging unit 4 may move in the traveling direction X1 (or in the opposite direction to the traveling direction X1).
- And inspection system A1 performs the following inspection processing to photovoltaic cell 9 which stopped at the inspection position.
- the first lighting device 2 is disposed below the transport device 5.
- the first lighting device 2 emits illumination light Lt1 from below to the solar battery cell 9 stopped at the inspection position.
- illumination light Lt1 which injected into the lower surface of the photovoltaic cell 9 permeate
- the first lighting device 2 is a light source for generating the transmitted light Lt11 which is the light transmitted through the solar battery cell 9.
- the wavelength of the illumination light Lt1 is preferably in the range of 900-1300 nm at which the efficiency of transmission through the solar battery cell 9 is relatively high. In the present embodiment, the wavelength of the illumination light Lt1 is 950 nm, and the illumination light Lt1 corresponds to near infrared light.
- the wavelength of the transmitted light Lt11 is equal to the wavelength of the illumination light Lt1.
- the second lighting device 3 ⁇ / b> A is an embodiment of the light emission generation device 3 that causes the solar cell 9 to emit light.
- the second lighting device 3 ⁇ / b> A is disposed above the transport device 5.
- the second lighting device 3A emits excitation light Lt2 from above to the solar battery cell 9 stopped at the inspection position.
- the solar battery cell 9 irradiated with the excitation light Lt2 emits light by photoluminescence (PL) to emit a light emission Lt21. That is, the second lighting device 3A is a light source for causing the solar battery cell 9 to emit PL light to generate the light emission Lt21.
- the wavelength of the excitation light Lt2 is 630 nm, and the excitation light Lt2 corresponds to red light.
- the wavelength of light emission Lt21 due to PL light emission of the solar battery cell 9 substantially falls within the range of 1000-1100 nm.
- FIG. 2 is equipped with one 1st illuminating device 2 and two 2nd illuminating devices 3A, each number of the 1st illuminating devices 2 and 2nd illuminating devices 3A is Not limited to a specific number.
- the imaging unit 4 includes a first imaging device 41, a second imaging device 42, and a filter 42a.
- the first imaging device 41 and the second imaging device 42 are respectively disposed above the transport device 5.
- the first imaging device 41 and the second imaging device 42 respectively image the light receiving surface 91 of the solar battery cell 9 stopped at the inspection position from above.
- the filter 42 a is provided in the second imaging device 42.
- the filter 42 a attenuates the excitation light Lt 2 and passes the light emission Lt 21.
- the filter 42 a according to the present embodiment attenuates light having a wavelength of less than 900 nm and transmits light having a wavelength of 900 nm or more.
- the 2nd imaging device 42 light-receives the light which passed the filter 42a, and images it.
- the second imaging device 42 can increase the light reception amount of the light emission Lt 21 by the filter 42 a compared to the light reception amount of the excitation light Lt 2.
- each of the 1st imaging device 41 and the 2nd imaging device 42 is a camera which images a black-and-white still picture, and is arrange
- Each of the images captured by the first imaging device 41 and the second imaging device 42 is a grayscale image in which the grayscale level is set to, for example, 256 levels.
- the first imaging device 41 outputs the information of the gray-scale image to the computer system 1 as the information of the transmission image.
- the second imaging device 42 outputs the gray scale image information to the computer system 1 as the PL light emission image information.
- Each of the first imaging device 41 and the second imaging device 42 may be a camera that captures a color image.
- the operations of the first lighting device 2, the second lighting device 3A, the first imaging device 41, the second imaging device 42, and the transport device 5 are controlled by the device control device 10.
- the device control device 10 moves the solar battery cell 9 to be inspected in the X1 direction to the predetermined inspection position. Then, the device control device 10 causes the first imaging device 41 to image the light receiving surface 91 of the solar battery cell 9 when the first lighting device 2 is turned on and the second lighting device 3A is turned off. In this case, the first imaging device 41 receives the transmitted light Lt11 to generate information of a gray image, and outputs the information of the gray image by the transmitted light Lt11 to the computer system 1 as information of a transmitted image.
- the device control device 10 causes the second imaging device 42 to image the light receiving surface 91 of the solar battery cell 9 when the first lighting device 2 is turned off and the second lighting device 3A is turned on.
- the second imaging device 42 receives the light emission Lt21 to generate information of the gray scale image, and outputs the information of the gray scale image by the light emission Lt21 to the computer system 1 as the information of the PL light emission image (light emission image) Do.
- the computer system 1 monitors each operation of the first lighting device 2, the second lighting device 3A, the first imaging device 41, and the second imaging device 42 by the device control device 10, and transmits information of a transmission image and PL light emission image. Receive information
- the computer system 1 may have the function of the device control apparatus 10.
- the computer system 1 executes an image processing program to perform image processing on information on a transmission image and information on a PL emission image. Furthermore, it is preferable that the computer system 1 executes a program for image processing to perform a crack inspection of the solar battery cell 9 using the information of the transmission image and the information of the PL light emission image.
- the computer system 1 mainly includes a processor and memory as hardware.
- the processor executes the program (program for image processing) recorded in the memory (non-transitory recording medium) of the computer system 1 to realize the function of the image processing system 11 described later in the present disclosure.
- the program may be pre-recorded in the memory of the computer system 1, but may be provided through a telecommunication line, or may be non-transitory recording such as a memory card, an optical disc, a hard disk drive, etc. readable by the computer system 1. It may be recorded on a medium and provided.
- the processor of the computer system 1 is configured of one or more electronic circuits including a semiconductor integrated circuit (IC) or a large scale integrated circuit (LSI).
- the plurality of electronic circuits may be integrated into one chip or may be distributed to a plurality of chips.
- the plurality of chips may be integrated into one device or may be distributed to a plurality of devices.
- the computer system 1 functions as an image processing system 11 by executing a program for image processing.
- the image processing system 11 includes a first acquisition unit 111, a second acquisition unit 112, an image processing device 113, and an output unit 114, and determines whether or not the crack 8 is generated in the solar battery cell 9 to be inspected. Do.
- the first acquisition unit 111 receives the information of the transmission image from the first imaging device 41.
- the second acquisition unit 112 receives the information of the PL light emission image from the second imaging device 42.
- the image processing apparatus 113 receives the information of the transmission image from the first acquisition unit 111, and receives the information of the PL light emission image from the second acquisition unit 112.
- the image processing apparatus 113 includes a position correction unit 113a, an area setting unit 113b, and an inspection unit 113c.
- the position correction unit 113a performs position correction processing on each of the transmission image and the PL light emission image.
- the position correction process is respectively performed on the transmission image and the PL light emission image in the virtual two-dimensional space generated by the computer system 1.
- coordinate conversion processing is performed so that each direction of the region where the solar battery cells 9 appear in the transmission image and the region where the solar battery cells 9 appear in the PL light emission image becomes the reference direction. Is done.
- amendment of the grayscale image G1 shown to FIG. The process will be described. That is, reading gray-scale image G1 in the following description as a transmission image corresponds to position correction processing of a transmission image, and reading gray-scale image G1 as a PL light emission image corresponds to position correction processing of a PL light emission image.
- the solar battery cell 9 is shown in the gray image G1, and in the gray image G1, the region where the solar battery cell 9 is shown is taken as a cell region 71.
- the cell area 71 has a substantially rectangular shape as in the solar battery cell 9.
- the position correction unit 113 a extracts the positions of the four corners of the cell area 71 from the gray-scale image G1 of the solar battery cell 9.
- the position correction unit 113a performs differentiation processing or binarization processing on the grayscale image G1 to extract the cell area 71 in the grayscale image G1. Then, the position correction unit 113a arranges four points P1, P2, P3, and P4 for position correction at positions of four corners of the cell area 71, respectively.
- the position correction unit 113a uses a binary image G2 (see FIG. 5B) obtained by binarizing the gray value of each pixel of the gray image G1 so that the four sides surrounding the outer periphery of the cell area 71 can be easily extracted.
- the positions of four points P1, P2, P3 and P4 are determined.
- Points P1, P2, P3 and P4 are two sides parallel to finger electrode 93 among four sides surrounding the outer periphery of cell area 72 (an area corresponding to cell area 71 of gray image G1) in binary image G2. These are intersections obtained by extending two sides orthogonal to the finger electrode 93.
- the position correction unit 113a When the position correction unit 113a extracts the coordinates of four points P1, P2, P3, and P4 in the binary image G2, the four points P1, P2, P3, and P4 in the grayscale image G1 are the same as the binary image G2. Arrange at each coordinate. Then, the position correction unit 113a performs coordinate conversion of each pixel in the grayscale image G1 such that a quadrangle having four points P1, P2, P3, and P4 of the grayscale image G1 as the apex points in the reference direction. At this time, the position correction unit 113a matches one or more predetermined ones of the four points P1, P2, P3, and P4 of the grayscale image G1 with the reference coordinates.
- the cell area 71 in the transmission image can be oriented in the reference direction.
- the position correction process performed on the gray image G1 described above is performed on the PL light emission image, so that the cell region 71 in the PL light emission image can be oriented in the reference direction.
- the imaging region of the finger electrode 93 extends along the 0 ° direction or the 180 ° direction of the two-dimensional space. In this way, coordinate conversion processing is performed.
- the cell regions 71 of the transmission image and the cell regions 71 of the PL light emission image face the same predetermined direction, which will be described later by the region setting unit 113 b as compared with the case where the position correction processing is not performed.
- the accuracy of the extraction process of the candidate area 80 and the inspection area 81 is improved.
- the cell region in the transmission image in the virtual two-dimensional space 71 and the coordinates of the cell area 71 in the PL light emission image match (almost match).
- the position correction unit 113a generates the corrected gray-scale image G3 shown in FIG. 6 by performing the above-described position correction process on the gray-scale image G1.
- the corrected gray image G3 corresponds to a corrected transmission image.
- the corrected grayscale image G3 corresponds to a corrected PL light emission image.
- the area setting unit 113b performs a sharpening process on the corrected gray-scale image G3 (corrected transmission image and corrected PL light emission image) to determine a candidate area 80 in which a crack may occur, and further surrounds the candidate area 80.
- the inspection area 81 is determined.
- the direction in which the candidate region 80 extends in the corrected gray-scale image G3 is the direction of 45 degrees (225 degrees) or 135 degrees (315 degrees) in a virtual two-dimensional space . Therefore, the area setting unit 113b evaluates the direction in which the gray value in the corrected gray-scale image G3 changes, and extracts the candidate area 80 extending in the direction of 45 degrees or 135 degrees in the virtual two-dimensional space.
- the region setting unit 113 b uses a two-dimensional wavelet filter, preferably a two-dimensional Gabor filter, in order to evaluate the direction in which the gray value changes.
- the two-dimensional Gabor filter is a spatial filter that uses a kernel represented by a Gabor function.
- the Gabor function is a product of a harmonic function represented by a sine function and a cosine function and a Gaussian function. Therefore, the Gabor filter includes an angle (angle parameter) in the parameter.
- the kernel of the Gabor filter is n pixels ⁇ n pixels, and n is selected in an appropriate range of about 5 or more and 256 or less.
- the Gabor filter When the Gabor filter is applied to the corrected gray-scale image G3, a two-dimensional Gabor filter is superimposed on part of the corrected gray-scale image G3.
- the gray-scale value of the corrected gray-scale image G3 is multiplied by the signal value of the Gabor filter for each pixel, and the Gabor filter and the corrected gray-scale image G3 overlap.
- the sum of the multiplied values for all the pixels in the area is determined.
- the sum of the multiplication values obtained in this manner becomes the pixel value at the center of the kernel. That is, convolution of the gray-scale image by the Gabor filter is performed. Therefore, it is desirable that the value of n that determines the size of the kernel is an odd number.
- the signal value after the convolution operation becomes a large value. If the signal value after the convolution operation is regarded as the response of the Gabor filter, it can be said that the response of the Gabor filter becomes strong when the change of the gray value in the corrected gray-scale image G3 and the parameter of the Gabor filter have a predetermined relationship.
- the area setting unit 113b scans the Gabor filter whose angle parameter is set at 45 degrees and 135 degrees in the corrected gray-scale image G3 after position correction, and performs convolution calculation by the Gabor function for each position where the Gabor filter is overlapped. . That is, the area setting unit 113b performs Gabor wavelet transform on the corrected gray-scale image G3. In the corrected gray-scale image G3 on which Gabor wavelet transformation has been performed, a region representing extension in the direction of 45 degrees or 135 degrees is emphasized by the change in gray value.
- the kernel of the Gabor filter used by the region setting unit 113b is smaller than the corrected gray-scale image G3.
- the area setting unit 113 b uses, for example, a Gabor filter having a size of about 41 pixels ⁇ 41 pixels.
- the cleavage direction of single crystal silicon is 45 degrees or 135 degrees with respect to the horizontal direction. Therefore, the Gabor filter angle parameters are set to 45 degrees and 135 degrees. As a result, the change of the gray value in the corrected gray image G3 becomes large in the direction orthogonal to the direction of cleavage.
- the distance for moving the Gabor filter once is set smaller than the number of pixels on one side of the Gabor filter.
- the distance for moving the Gabor filter once may be at least one pixel. As the distance for moving the Gabor filter once increases, the time required for scanning decreases, but the probability of missing a candidate area increases. Therefore, the distance by which the Gabor filter is moved once is appropriately determined by the relationship between time and accuracy.
- the region setting unit 113b further performs at least one of binarization processing and differentiation processing on the corrected gray-scale image G3 subjected to Gabor wavelet transform to generate a sharpened image.
- a region representing extension in the direction of 45 degrees or 135 degrees is further emphasized as a candidate region of a crack due to a change in gray value.
- FIG. 7 shows a part of a sharpened image G4 (binary image) in which the corrected gray-scale image G3 is subjected to Gabor wavelet transformation and then binarized.
- a pixel of a dark pixel or a bright pixel which is a candidate for a crack extending in the 45.degree. Groups are highlighted as candidate regions 80.
- a plurality of candidate areas 80 may exist.
- the region setting unit 113b sets a circumscribed rectangle D1 (see FIG. 7) circumscribing the candidate region 80 in the sharpened image G4.
- the circumscribed rectangle D1 circumscribing the candidate area 80 is set to have sides parallel to the 0 degree (or 180 degree) direction and the 90 degree (or 270 degree) direction of the two-dimensional space in the sharpened image G4. . Not all the pixels constituting the candidate area 80 are connected, but there may be a gap of several pixels between the pixels.
- the region setting unit 113b applies the circumscribed rectangle D1 in the sharpened image G4 to the corrected gray-scale image G3 (corrected transmission image and corrected PL light emission image). That is, the area setting unit 113b sets the coordinates at which the circumscribed rectangle D1 is located in the sharpened image G4 and the coordinates at which the circumscribed rectangle D1 is located in the corrected grayscale image G3 as the same coordinates. Then, the area setting unit 113b sets an area within the circumscribed rectangle D1 in the corrected gray-scale image G3 as the inspection area 81.
- the corrected gray-scale image G3 is a corrected transmission image
- an inspection area 81 is set in the corrected transmission image.
- the corrected gray-scale image G3 is a corrected PL light emission image
- an inspection area 81 is set in the corrected PL light emission image. Then, the corrected transmission image in which the inspection area 81 is set and the corrected PL light emission image in which the inspection area 81 is set are delivered to the inspection unit 113c.
- the inspection unit 113c executes a recognition algorithm on the inspection area 81 of the corrected transmission image and the inspection area 81 of the correction PL light emission image to determine whether or not the crack 8 is generated in the solar cell 9 to be inspected. Determine
- FIG. 8A shows a part of the corrected transmission image G3a as the corrected gray-scale image G3.
- the candidate area 80a is shown in the cell area 71a (an area corresponding to the cell area 71 of the gray-scale image G1).
- An inspection area 81a to be included is set.
- FIG. 8B shows a part of the corrected PL light-emitting image G3b as the corrected gray-scale image G3.
- the candidate area 80b is shown in the cell area 71b (an area corresponding to the cell area 71 of the gray-scale image G1).
- An inspection area 81 b including the above is set.
- the corrected transmission image G3a and the corrected PL light emission image G3b etching unevenness of the solar battery cell 9, etching pattern, abrasion marks of the surface film, dirt, and the like are respectively reflected as noise.
- the noise concentration and the noise density such as the distribution are different from each other.
- etching unevenness of the solar battery cell 9 and noise due to the etching pattern are likely to be captured.
- noise due to abrasion marks on the surface film is likely to appear.
- the inspection unit 113c determines whether or not the crack 8 is generated in the solar battery cell 9 using the corrected transmission image G3a and the correction PL light emission image G3b having different noise densities.
- the inspection unit 113c can improve the determination accuracy of the crack inspection as compared to the prior art by using or complementing the features of the corrected transmission image G3a and the corrected PL light emission image G3b. That is, based on the captured image of the solar battery cell 9, the inspection unit 113c can accurately determine the crack 8 of the solar battery cell 9, and can accurately distinguish the crack 8 from other elements (noises). Other factors include uneven etching, etched patterns, scratches on the surface film, and dirt.
- the inspection unit 113c preferably executes a recognition algorithm constructed by machine learning, in particular, deep learning.
- a recognition algorithm constructed by deep learning a transmission image and a PL light emission image of the solar battery cell 9 in which a crack 8 is generated using a neural network of a multilayer structure in advance, the solar battery cell 9 in which the crack 8 is not generated. It is constructed by deep learning in which each data such as transmission image and PL emission image is used as a learning model.
- the inspection unit 113c is implemented with a neural network NN1 shown in FIG.
- information of the corrected transmission image G3a in which the inspection area 81a is set and the corrected PL light emission image G3b in which the inspection area 81b is set is input to the neural network NN1. Therefore, the inspection unit 113c has a simpler configuration than when a plurality of neural networks are mounted.
- the neural network NN1 is a convolutional neural network (Convolutional Neural Network) including convolutional layers 101 and 102, pooling layers 103 and 104, a coupling layer 105, an inception module 106, a coupling layer 107, and a total coupling layer 108.
- Convolutional Neural Network Convolutional Neural Network
- the convolution layer 101 is a convolution filter which receives the information of the corrected transmission image G3a in which the inspection region 81a is set, and performs a convolution operation of the inspection region 81a of the correction transmission image G3a and the image patch representing the feature of the crack 8. .
- the result of the convolution operation by the convolution layer 101 is output from the convolution layer 101 as data of the same size as the inspection area 81 a.
- the convolution layer 102 is a convolution filter that receives the corrected PL light emission image G3b in which the inspection area 81b is set, and performs a convolution operation of the inspection area 81b of the corrected PL light emission image G3b and the image patch representing the feature of the crack 8. .
- the result of the convolution operation by the convolution layer 102 is output from the convolution layer 102 as data of the same size as the inspection area 81 b.
- the pooling layer 103 reduces the data output by the convolutional layer 101
- the pooling layer 104 reduces the data output by the convolutional layer 102.
- the bonding layer 105 delivers each output of the pooling layers 103 and 104 to the inception module 106.
- the inception module 106 a plurality of convolution filters are provided in parallel, and each of the plurality of convolution filters performs a convolution operation.
- Bonding layer 107 delivers each output of inception module 106 to all bonding layers 108.
- the candidate areas 80a and 80b reflected in the inspection areas 81a and 81b correspond to the cracks 8 of the solar cells 9 based on the respective outputs of the inception module 106 (ie, solar cells It is determined whether or not the crack 8 is generated in the cell 9).
- the image processing system 11 includes an output unit 114.
- the output unit 114 outputs image data including an image of the solar battery cell 9 in which the location of the candidate area 80 corresponding to the crack 8 is indicated, and each information such as the determination process, as a result of the crack inspection. Are output to the display device 6.
- the display device 6 displays the result of the crack inspection based on the received image data.
- the display device 6 is any one of a liquid crystal display, an organic EL display EL: Electroluminescence), a CRT (Cathode Ray Tube), and the like.
- the inspection unit 113c receives each information of the first neural network to which the information of the corrected transmission image G3a in which the inspection area 81a is set is input and the correction PL light emission image G3b in which the inspection area 81b is set.
- a neural network may be provided.
- the inspection unit 113c has a final determination unit that creates and outputs one determination result based on the determination result of the first neural network and the determination result of the second neural network.
- the final determination unit may be a neural network or an arithmetic unit that performs a logical operation of two inputs.
- the inspection unit 113c may be implemented with a support vector machine (SVM).
- SVM support vector machine
- the support vector machine receives the information of the corrected transmission image G3a in which the inspection area 81a is set and the correction transmission image G3b in which the inspection area 81b is set. Then, the support vector machine determines whether the candidate areas 80 a and 80 b correspond to the cracks 8 of the solar battery cell 9.
- the inspection unit 113c obtains in advance each feature amount of the corrected transmission image G3a in which the inspection region 81a is set and the correction transmission image G3b in which the inspection region 81b is set, and inputs these feature amounts to the support vector machine. Is preferred.
- the first acquisition unit 111 receives the information of the transmission image from the first imaging device 41.
- the second acquisition unit 112 receives the information of the PL light emission image from the second imaging device 42. That is, the image processing system 11 receives the information of the transmission image and the information of the PL emission image (step S1). Then, the image processing system 11 executes image processing by the above-described image processing apparatus 113 (the position correction unit 113a, the area setting unit 113b, and the inspection unit 113c) (step S2).
- the imaging unit 4 may be configured to include the second imaging device 42 and the filter 42 a and not include the first imaging device 41.
- the filter 42a transmits the transmitted light Lt11 and the light emission Lt21 and attenuates the excitation light Lt2.
- the inspection system A2 can reduce the number of imaging devices as compared with the inspection system A1, and can achieve cost reduction and simplification of the system configuration.
- the power supply device 3B is provided as another form of the light emission generator 3 which makes light emission of the photovoltaic cell 9 occur.
- the power supply device 3 ⁇ / b> B supplies power to the solar battery cells 9 to flow forward current in the solar battery cells 9.
- the solar battery cell 9 to which the forward current is supplied emits light by electroluminescence (EL) to emit light emission Lt 31. That is, the power supply device 3B causes the solar battery cell 9 to emit light to generate the light emission Lt31.
- EL electroluminescence
- the device control device 10 controls the transport device 5 to move the solar battery cell 9 to be inspected in the X1 direction to the predetermined inspection position. Then, when the first lighting device 2 is turned off, the device control device 10 causes the power supply device 3B to supply power to the solar battery cell 9, and causes the second imaging device 42 to receive the light receiving surface 91 of the solar battery cell 9. Take an image. In this case, the second imaging device 42 receives the light emission Lt31 and generates information of a gray scale image, and outputs the information of the gray scale image by the light emission Lt31 to the computer system 1 as information of an EL light emission image (light emission image) Do.
- the inspection system A3 does not have to include the filter 42a (see FIG. 1).
- the computer system 1 performs image processing on the information on the EL light emission image as in the case of the information on the PL light emission image described above.
- the content of the image processing performed on the information of the EL light emission image is the same as the content of the image processing performed on the information of the PL light emission image, and thus the description thereof is omitted.
- inspection system A3 can also distinguish crack 8 of photovoltaic cell 9 accurately based on the image pick-up picture of photovoltaic cell 9. Then, the inspection system A3 can accurately distinguish the crack 8 from other elements (noise) such as etching unevenness, etching patterns, abrasion marks of the surface film, and dirt.
- elements such as etching unevenness, etching patterns, abrasion marks of the surface film, and dirt.
- the image processing system (11) is an image processing system for inspecting a crack (8) of a solar cell (9) based on an image of the solar cell (9). is there.
- the image processing system (11) includes a first acquisition unit (111), a second acquisition unit (112), and an image processing apparatus (113).
- the first acquisition unit (111) acquires information of a transmission image (grayscale image G1) which is an image of the solar battery cell (9) by the transmitted light (Lt11) transmitted through the solar battery cell (9).
- the second acquisition unit (112) acquires information of a light emission image (grayscale image G1) that is an image of the solar battery cell (9) by the light emission (Lt21 or Lt31) of the solar battery cell (9).
- the image processing apparatus (113) receives the information of the transmission image and the respective information of the light emission image and performs image processing to determine whether or not a crack (8) has occurred in the solar battery cell (9).
- the image processing system (11) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). Then, the image processing system (11) can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks of the surface film, dirt and the like.
- the light emission image is captured by the solar battery cell (9) emitting light by irradiation of the excitation light (Lt2). It is preferable that the obtained PL light emission image (grayscale image G1).
- the image processing system (11) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). And an image processing system (11) can distinguish a crack (8) and other elements with sufficient accuracy.
- the light emitting image is an EL from which a solar battery cell (9) emitting light is supplied by being supplied with current. It is preferable that it is a luminescent image (grayscale image G1).
- the image processing system (11) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). And an image processing system (11) can distinguish a crack (8) and other elements with sufficient accuracy.
- the transmission image and the light emission image are gray-scale images, respectively.
- the image processing apparatus (113) preferably includes a position correction unit (113a), an area setting unit (113b), and an inspection unit (113c).
- the position correction unit (113a) the cell region (71) in which the solar battery cell (9) is shown in the transmission image, and the cell region (71) in which the solar battery cell (9) is shown in the light emission image are each specified.
- a position correction process is performed to correct the transmission image and the light emission image so as to face in the direction.
- the position correction unit (113a) corrects the corrected transmission image (G3a), which is a transmission image subjected to position correction processing, and the corrected light emission image (for example, a correction PL light emission image G3b), which is a light emission image subjected to position correction processing.
- Generate The area setting unit (113b) generates information of an inspection area (81a, 81b) in which it is estimated that the crack (8) appears in the corrected transmission image (G3a) and the correction emission image.
- the inspection unit (113c) determines whether or not a crack (8) has occurred in the solar battery cell (9) based on the corrected transmission image (G3a) and the correction light emission image in which the inspection regions (81a, 81b) are respectively set Determine
- the predetermined direction in the position correction process is a reference direction.
- the reference direction is one predetermined direction in a virtual two-dimensional space in which a transmission image and a light emission image are generated.
- the inspection area (81a, 81b) by the area setting unit (113b) is compared with the case where the position correction processing is not performed.
- the accuracy of the extraction process of 81 b) is improved.
- the inspection accuracy by the inspection unit (113c) is also improved.
- the inspection unit (113c) corrects the transmission image (G3a) in which the inspection areas (81a, 81b) are set. It is preferable to determine whether or not a crack (8) has occurred in the solar battery cell (9) by executing a recognition algorithm constructed by machine learning on the corrected light emission image.
- the image processing system (11) further improves the accuracy of the crack inspection process by executing the recognition algorithm constructed by machine learning.
- the machine learning is preferably deep learning.
- an inspection part (113c) has a neural network (NN1) which performs a recognition algorithm constructed by deep learning.
- the image processing system (11) further improves the accuracy of the crack inspection process by executing the recognition algorithm constructed by deep learning.
- the neural network (NN1) has two convolutional layers (101, 102). Two convolutional layers (101, 102) are input with the respective information of the corrected transmission image (G3a) and the correction emission image in which the inspection regions (81a, 81b) are respectively set.
- the image processing system (11) has a simple configuration as compared with the case of using two neural networks to which the corrected transmission image (G3a) and the corrected light emission image are respectively input.
- the region setting unit (113b) performs correction by performing a sharpening process. It is preferable to extract an inspection area (81a, 81b) from the transmission image (G3a) and the corrected light emission image.
- the sharpening process emphasizes an edge extending along the cleavage direction of the solar battery cell (9) in each of the corrected transmission image (G3a) and the corrected light emission image.
- the direction of cleavage is the surface direction of the cleavage plane of the solar battery cell (9).
- the direction of cleavage is the direction in which the cracks of the solar cell (9) extend.
- the direction of cleavage is one or more edges (two in the present embodiment) of one or more cleavage planes of the solar battery 9 on one surface (the light receiving surface in the present embodiment) of the solar battery cell (9).
- (Edge) is the direction in which it extends.
- the direction of cleavage includes at least one direction of 45 degrees, 225 degrees, 135 degrees, and 315 degrees with respect to one direction.
- the image processing system (11) can accurately detect the edge extending along the cleavage direction of the solar battery cell (9) by the sharpening process, and the extraction accuracy of the inspection area (81a, 81b) is also improved. .
- the cleavage directions of the solar battery cell (9) are first directions (0 degree direction or 180 degrees) orthogonal to each other It is preferable that the direction is the second direction (90 degrees direction or 270 degrees direction).
- the image processing system (11) can inspect the crack (8) of the solar battery cell (9) using a single crystal material such as single crystal silicon with high accuracy.
- the area setting unit (113b) preferably performs the sharpening process using a wavelet filter in the eighth or ninth aspect.
- the image processing system (11) can detect the candidate area (80) with high accuracy.
- An inspection system (A1, A2, A3) includes an imaging unit (4), a first illumination device (2), a light emission generation device (3), and And an image processing system (11) according to any one of the ten aspects.
- An imaging unit (4) images a solar cell (9).
- the first lighting device (2) applies illumination light (Lt1) to the solar battery cell (9) to generate transmission light (Lt11) in which the illumination light (Lt1) is transmitted through the solar battery cell (9).
- the light emission generation device (3) (the second lighting device 3A or the power supply device 3B) generates the light emission (Lt21 or Lt31) of the solar battery cell (9).
- the imaging unit (4) receives the transmitted light (Lt11), outputs the information of the transmitted image to the image processing system (11), receives the light emission, and receives the information of the light emission image to the image processing system (11). Output.
- the inspection system (A1, A2, A3) can accurately determine the crack (8) of the solar cell (9) based on the captured image of the solar cell (9).
- the inspection system (A1, A2, A3) can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks on the surface film, dirt, and the like.
- the light emission generation device (3) irradiates the solar battery cell (9) with excitation light (Lt2). It is preferable that it is a 2nd illuminating device (3A) which produces light emission (Lt21) of a photovoltaic cell by photoluminescence.
- the luminescence image is a PL luminescence image.
- the inspection system (A1, A2) can accurately determine the crack (8) of the solar cell (9) based on the captured image of the solar cell (9). And an inspection system (A1, A2) can distinguish a crack (8) and other elements with sufficient accuracy.
- the imaging unit (4) includes the first imaging device (41), the filter (42a), and the second imaging device according to the twelfth aspect. It is preferable to have (42).
- the first imaging device (41) receives the transmitted light (Lt11) and outputs information of the transmitted image to the image processing system (11).
- the filter (42 a) passes the light emission (Lt 21) and attenuates the excitation light (Lt 2).
- the second imaging device (42) receives the light emission (Lt21) through the filter (42a) and outputs the information of the PL light emission image to the image processing system (11).
- the inspection system (A1) can be provided with the first imaging device (41) suitable for capturing a transmission image and the second imaging device (42) suitable for capturing a PL light emission image, the inspection system (A1) can achieve high image quality. A captured image can be generated.
- the imaging unit (4) includes one imaging device (42), transmitted light (Lt11), and light emission (Lt21). And a filter (42a) for attenuating the excitation light (Lt2).
- the imaging device (42) receives the transmitted light (Lt11) through the filter (42a), outputs information of the transmitted image to the image processing system (11), and emits light (Lt21) through the filter (42a). The light is received and information of the PL emission image is output to the image processing system (11).
- the inspection system (A2) can achieve cost reduction and simplification of the system configuration.
- the light emission generating device (3) supplies power to the solar battery cell (9), and the solar battery is electroluminescent. It is preferable that it is a power supply device (3B) which produces light emission (Lt31) of a cell (9).
- the luminescence image is an EL luminescence image.
- the inspection system (A3) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). And an inspection system (A3) can distinguish a crack (8) and other elements with sufficient accuracy.
- the image processing method of the 16th aspect which concerns on embodiment is an image processing method for test
- the image processing method includes an acquisition step (S1) and an image processing step (S2).
- An acquisition step (S1) acquires the information of the transmitted image (grayscale image G1) which is an image of the photovoltaic cell (9) by the transmitted light (Lt11) which permeate
- an acquisition step (S1) acquires the information of the light emission image (grayscale image G1) which is an image of the photovoltaic cell (9) by light emission (Lt21 or Lt31) of a photovoltaic cell (9).
- the image processing step (S2) receives the information of the transmission image and the respective information of the light emission image and performs image processing to determine whether or not a crack (8) is generated in the solar battery cell (9).
- the above-mentioned image processing method can discriminate crack (8) of a photovoltaic cell (9) accurately based on an image pick-up picture of a photovoltaic cell (9). Then, the image processing method can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks of the surface film, dirt and the like.
- the program according to the seventeenth aspect relates to the computer system (1) to execute the image processing method according to the sixteenth aspect.
- the above-mentioned program can judge crack (8) of a photovoltaic cell (9) accurately based on an image pick-up picture of a photovoltaic cell (9). Then, the program can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks of the surface film, dirt, and the like.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Abstract
The present disclosure addresses the problem of providing an image processing system, an inspection system, an image processing method, and a program with which it is possible to precisely assess cracks in a solar battery cell and to precisely distinguish between cracks and other elements such as unevenness in etching. The image processing system (11) according to the present disclosure is provided with a first acquisition unit (111), a second acquisition unit (112), and an image processing device (113). The first acquisition unit (111) acquires information about a transmission image, which is an image of a solar battery cell (9) created by transmitted light (Lt11) that is transmitted through the solar battery cell (9). The second acquisition unit (112) acquires information about a PL light emission image, which is an image of the solar battery cell (9) formed of emitted light (Lt21) from the solar battery cell (9) that is produced by the radiation of excitation light (Lt2). The image processing device (113) receives the information about the transmission image and the information about the PL light emission image and performs image processing to thereby determine whether a crack has formed in the solar battery cell (9).
Description
本開示は、画像処理システム、検査システム、画像処理方法、及びプログラムに関する。本開示は、より詳しくは、太陽電池セルの画像に基づいて太陽電池セルのクラックを検査するための画像処理システム、検査システム、画像処理方法、及びプログラムに関する。
The present disclosure relates to an image processing system, an inspection system, an image processing method, and a program. More particularly, the present disclosure relates to an image processing system, an inspection system, an image processing method, and a program for inspecting a crack of a solar cell based on an image of the solar cell.
従来、多結晶シリコンウエハのクラック検査を行うために、種々の検査装置が提案されている。
Heretofore, various inspection apparatuses have been proposed to inspect a crack in a polycrystalline silicon wafer.
特許文献1の検査装置は、多結晶シリコンウエハの裏面に照射された赤外線の透過光による画像、及び多結晶シリコンウエハの表面に照射された赤外線の反射光による画像を撮像し、撮像した透過光による画像データと反射光による画像データとを比較する。そして、検査装置は、透過光による画像データと反射光による画像データとの比較結果により、多結晶シリコンウエハの内部クラックの有無を判定する。
The inspection apparatus of Patent Document 1 captures an image by transmitting an infrared ray transmitted to the back surface of the polycrystalline silicon wafer and an image reflected by the infrared light irradiated to the front surface of the polycrystalline silicon wafer, and captures the transmitted light The image data by and the image data by the reflected light are compared. Then, the inspection apparatus determines the presence or absence of the internal crack of the polycrystalline silicon wafer based on the comparison result of the image data by the transmitted light and the image data by the reflected light.
従来の検査装置では、シリコンウエハ(太陽電池セル)のエッチングむらなどの他の要素をクラックであると誤って判定する場合があり、クラックの検出精度の向上が求められていた。
In the conventional inspection apparatus, other elements such as etching unevenness of a silicon wafer (solar battery cell) may be erroneously determined to be a crack in some cases, and improvement in crack detection accuracy has been desired.
本開示は、太陽電池セルの撮像画像に基づいて、太陽電池セルのクラックを精度よく判別し、クラックとエッチングむらなどの他の要素とを精度よく区別することができる画像処理システム、検査システム、画像処理方法、及びプログラムを提供することを目的する。
The present disclosure is an image processing system and inspection system capable of accurately determining a crack of a solar battery cell based on a captured image of a solar battery cell and accurately distinguishing the crack and other elements such as etching unevenness, An object of the present invention is to provide an image processing method and program.
本開示に係る一形態の画像処理システムは、太陽電池セルの画像に基づいて前記太陽電池セルのクラックを検査するための画像処理システムである。前記画像処理システムは、第1取得部と、第2取得部と、画像処理装置と、を備える。前記第1取得部は、前記太陽電池セルを透過した透過光による前記太陽電池セルの画像である透過画像の情報を取得する。第2取得部は、前記太陽電池セルの発光による前記太陽電池セルの画像である発光画像の情報を取得する。前記画像処理装置は、前記透過画像の情報及び前記発光画像の各情報を受け取って画像処理を行うことで、前記太陽電池セルに前記クラックが生じているか否かを判定する。
An image processing system according to an embodiment of the present disclosure is an image processing system for inspecting a crack of the solar battery cell based on an image of the solar battery cell. The image processing system includes a first acquisition unit, a second acquisition unit, and an image processing apparatus. The first acquisition unit acquires information of a transmission image which is an image of the solar battery cell by transmitted light transmitted through the solar battery cell. The second acquisition unit acquires information of a light emission image which is an image of the solar battery cell by the light emission of the solar battery cell. The image processing apparatus receives the information of the transmission image and each information of the light emission image and performs image processing to determine whether the crack is generated in the solar battery cell.
本開示に係る一形態の検査システムは、撮像ユニットと、第1照明装置と、発光発生装置と、上述の画像処理システムと、を備える。前記撮像ユニットは、太陽電池セルを撮像する。前記第1照明装置は、前記太陽電池セルに照明光を照射して、前記照明光が前記太陽電池セルを透過した透過光を生成する。前記発光発生装置は、前記太陽電池セルの発光を生じさせる。前記撮像ユニットは、前記透過光を受光して透過画像の情報を前記画像処理システムへ出力し、前記発光を受光して発光画像の情報を前記画像処理システムへ出力する。
An inspection system according to an aspect of the present disclosure includes an imaging unit, a first illumination device, a light emission generation device, and the above-described image processing system. The imaging unit images a solar battery cell. The first lighting device emits illumination light to the solar battery cell to generate transmission light in which the illumination light is transmitted through the solar battery cell. The light emitting device causes the solar cell to emit light. The imaging unit receives the transmitted light, outputs information of a transmitted image to the image processing system, receives the light emission, and outputs information of a light emission image to the image processing system.
本開示に係る一形態の画像処理方法は、太陽電池セルの画像に基づいて前記太陽電池セルのクラックを検査するための画像処理方法である。前記画像処理方法は、取得ステップと、画像処理ステップと、を備える。前記取得ステップは、前記太陽電池セルを透過した透過光による前記太陽電池セルの画像である透過画像の情報を取得し、前記太陽電池セルの発光による前記太陽電池セルの画像である発光画像の情報を取得する。前記画像処理ステップは、前記透過画像の情報及び前記発光画像の各情報を受け取って画像処理を行うことで、前記太陽電池セルに前記クラックが生じているか否かを判定する。
An image processing method according to an aspect according to the present disclosure is an image processing method for inspecting a crack of the solar battery cell based on an image of the solar battery cell. The image processing method includes an acquisition step and an image processing step. The acquiring step acquires information of a transmission image which is an image of the solar battery cell by transmitted light which has been transmitted through the solar battery cell, and information of a light emission image which is an image of the solar battery cell by light emission of the solar battery cell To get The image processing step receives the information of the transmission image and each information of the light emission image and performs image processing to determine whether the crack is generated in the solar battery cell.
本開示に係る一形態のプログラムは、コンピュータシステムに、上述の画像処理方法を実行させる。
A program according to an aspect of the present disclosure causes a computer system to execute the above-described image processing method.
以下に説明する太陽電池セルの検査システムは、コンピュータを用いた画像処理技術により、検査対象に生じているクラックを抽出する画像処理システムを備える。検査対象は、板状に形成された単結晶材料であって、とくに単結晶シリコンが積層された太陽電池セルを想定している。なお、検査対象となる太陽電池セルは、クラックが生じる方向に規則性があれば、単結晶材料であることは必須ではない。
The inspection system of a solar battery cell described below includes an image processing system that extracts a crack occurring in an inspection target by image processing technology using a computer. The inspection object is a single crystal material formed in a plate shape, and in particular, a solar battery cell in which single crystal silicon is stacked is assumed. In addition, if the photovoltaic cell used as a test object has regularity in the direction which a crack produces, it is not essential that it is single-crystal material.
図1は、本実施形態の検査システムA1のブロック構成を示す。図2は、検査システムA1の概略構成を示す。検査システムA1は、コンピュータシステム1、第1照明装置2、発光発生装置3(第2照明装置3A)、及び撮像ユニット4を主構成として備える。検査システムA1は、搬送装置5、表示装置6、及び機器制御装置10をさらに備えることが好ましい。そして、検査システムA1は、太陽電池セル9の欠陥検査として、太陽電池セル9のクラック検査を行う。
FIG. 1 shows a block configuration of an inspection system A1 of the present embodiment. FIG. 2 shows a schematic configuration of the inspection system A1. The inspection system A1 mainly includes a computer system 1, a first illumination device 2, a light emission generation device 3 (second illumination device 3A), and an imaging unit 4. The inspection system A1 preferably further includes a transport device 5, a display device 6, and a device control device 10. And inspection system A1 performs a crack inspection of photovoltaic cell 9 as a defect inspection of photovoltaic cell 9.
太陽電池セル9は、太陽電池モジュールを構成するセルである。太陽電池セル9は、図3に示すように、四角の板状(例えば、一辺が約125mmの正方形状)に形成されている。太陽電池セル9には、例えばHIT(Heterojunction with Intrinsic Thin-layer)(登録商標)太陽電池が用いられる。HIT太陽電池は、単結晶シリコン層の両面にアモルファスシリコン層が形成されている。太陽電池セル9の受光面91は、青系統色である。さらに、太陽電池セル9の受光面91には、複数のバスバー電極92が垂直方向(図3の上下方向)に直線的に形成され、複数のフィンガ電極93が水平方向(図3の左右方向)に直線的に形成されている。垂直方向に形成された複数のバスバー電極92は、水平方向に並んでいる。水平方向に形成された複数のフィンガ電極93は、垂直方向に並んでいる。バスバー電極92及びフィンガ電極93は、太陽光によって生成された電流を流す配線であり、銀ペーストまたはアルミニウムペーストなどで形成されており、表面は銀色となる。
The solar battery cell 9 is a cell that constitutes a solar battery module. As shown in FIG. 3, the solar battery cell 9 is formed in a square plate shape (for example, a square shape having one side of about 125 mm). For the solar battery cell 9, for example, a hetero junction with intrinsic thin-layer (HIT) (registered trademark) solar cell is used. In the HIT solar cell, an amorphous silicon layer is formed on both sides of a single crystal silicon layer. The light receiving surface 91 of the solar battery cell 9 has a bluish color. Furthermore, on the light receiving surface 91 of the solar battery cell 9, a plurality of bus bar electrodes 92 are linearly formed in the vertical direction (vertical direction in FIG. 3), and a plurality of finger electrodes 93 are horizontal direction (horizontal direction in FIG. 3) It is formed linearly. The plurality of bus bar electrodes 92 formed in the vertical direction are aligned in the horizontal direction. The plurality of finger electrodes 93 formed in the horizontal direction are aligned in the vertical direction. The bus bar electrode 92 and the finger electrode 93 are wirings which flow a current generated by sunlight, and are formed of silver paste or aluminum paste or the like, and the surface has a silver color.
一般に、太陽電池セル9にクラックが発生している場合、クラックの箇所は暗くなる。また、太陽電池セル9が単結晶シリコン層を具備する場合、単結晶シリコン層に発生するクラックは、クラックが生じる方向に規則性があり、直線状に一定方向にのみ発生する。そこで、太陽電池セル9を撮像した濃淡画像を用いてクラックの有無を判定する欠陥検査では、一般に、画素の濃淡値、方向、及び線のシャープ度合などに基づいて、クラックの有無が判定される。
Generally, when a crack is generated in the solar battery cell 9, the location of the crack becomes dark. In addition, when the solar battery cell 9 includes a single crystal silicon layer, the cracks generated in the single crystal silicon layer have regularity in the direction in which the cracks are generated, and are generated linearly and only in a certain direction. Therefore, in a defect inspection that determines the presence or absence of a crack using a gray image obtained by imaging the solar battery cell 9, in general, the presence or absence of a crack is determined based on the gray value of the pixel, the direction, and the sharpness of the line. .
本実施形態の太陽電池セル9は単結晶シリコン層を備えているから、太陽電池セル9の内部で単結晶シリコン層のへき開の方向にクラックを生じる可能性が高い。特に、太陽電池セル9の単結晶シリコン層は、厚み寸法が500[μm]以下と薄く、クラック検査は品質保証の観点から有効である。そして、クラックが生じていると判定された太陽電池セル9は、不良品に分類される。なお、へき開とは、結晶学的方向(へき開面の面方向)の一つに沿って単結晶シリコン層などの結晶が割れること又は状態である。また、へき開の方向とは、へき開面の面方向であり、クラックが延びる方向である。例えば、複数のへき開面を有する鉱物は複数のへき開の方向を有し、複数のへき開の方向の少なくとも1つに沿ってクラックが生じる。
Since the solar battery cell 9 of the present embodiment is provided with a single crystal silicon layer, there is a high possibility that a crack is generated in the direction of cleavage of the single crystal silicon layer inside the solar battery cell 9. In particular, the single crystal silicon layer of the solar battery cell 9 is as thin as 500 μm or less in thickness dimension, and the crack inspection is effective from the viewpoint of quality assurance. And the photovoltaic cell 9 determined that the crack has arisen is classified into inferior goods. Cleavage refers to a state in which a crystal such as a single crystal silicon layer is broken along one of the crystallographic directions (plane directions of cleavage planes). Moreover, the direction of cleavage is the surface direction of the cleavage surface, and is the direction in which the crack extends. For example, a mineral having multiple cleavage planes has multiple cleavage directions, and cracks develop along at least one of the multiple cleavage directions.
図4は、太陽電池セル9の受光面91の一部を拡大している。図4では、太陽電池セル9にクラック8が発生しており、クラック8は、単結晶シリコン層のへき開の方向に沿って延びている。クラック8は、直線形状であり、クラック8が延びる方向は、受光面91に平行な面内において、フィンガ電極93が延びる方向(水平方向)に対してほぼ45度(あるいは225度)(第1方向)、または135度(あるいは315度)(第2方向)の角度をなす可能性が高い。したがって、撮像画像において、クラック8が撮像されている領域(クラック領域)も、クラック8と同様に直線形状であり、クラック領域が延びる方向は、水平方向に対してほぼ45度(あるいは225度)または135度(あるいは315度)の角度をなす可能性が高くなる。すなわち、クラック領域を判別するための情報として、濃淡値が変化する方向を用いることができる。
FIG. 4 is an enlarged view of a part of the light receiving surface 91 of the solar battery cell 9. In FIG. 4, the crack 8 is generated in the solar battery cell 9, and the crack 8 extends along the cleavage direction of the single crystal silicon layer. The crack 8 has a linear shape, and the direction in which the crack 8 extends is approximately 45 degrees (or 225 degrees) with respect to the direction (horizontal direction) in which the finger electrode 93 extends in a plane parallel to the light receiving surface 91 (first Direction), or an angle of 135 degrees (or 315 degrees) (second direction) is likely to be made. Therefore, in the captured image, the area where the crack 8 is imaged (crack area) is also linear like the crack 8 and the direction in which the crack area extends is approximately 45 degrees (or 225 degrees) with respect to the horizontal direction Or the possibility of forming an angle of 135 degrees (or 315 degrees) is high. That is, the direction in which the gray value changes can be used as the information for determining the crack area.
まず、太陽電池セル9は、搬送装置5によって、第2照明装置3A及び撮像ユニット4の下方、並びに第1照明装置2の上方を、後方から前方に向かう進行方向X1に移動し、第1照明装置2及び第2照明装置3Aによる各照明処理、撮像ユニット4による撮像処理が行われる。
First, the solar battery cell 9 is moved by the transport device 5 below the second lighting device 3A and the imaging unit 4 and above the first lighting device 2 in the forward direction X1 from the rear to the first lighting, as shown in FIG. Each lighting process by the device 2 and the second lighting device 3A and an imaging process by the imaging unit 4 are performed.
搬送装置5は、例えばベルトコンベア装置で構成されている。搬送装置5は、モータ、プーリ、及びコンベアベルトなどを備えており、モータの回転駆動力がプーリなどを介してコンベアベルトに伝達される。コンベアベルト上に載置された太陽電池セル9は、進行方向X1に進み、予め決められた検査位置(撮像ユニット4の直下)で一旦停止して、クラック検査が行われた後に、進行方向X1に進み、次の太陽電池セル9が検査位置で一旦停止する。コンベアベルト上に載置された太陽電池セル9の受光面91は上方向を向いている。また、搬送装置5の下方に配置されている第1照明装置2の照明光が、検査位置に停止している太陽電池セル9に対して下方から照射されるように、搬送装置5には上下方向に連通する開口が設けられている。
The conveying device 5 is configured of, for example, a belt conveyor device. The conveying device 5 includes a motor, a pulley, a conveyor belt, and the like, and the rotational driving force of the motor is transmitted to the conveyor belt via the pulley and the like. The solar cells 9 placed on the conveyor belt advance in the traveling direction X1 and temporarily stop at a predetermined inspection position (immediately below the imaging unit 4), and after a crack inspection is performed, the traveling direction X1 And the next photovoltaic cell 9 is temporarily stopped at the inspection position. The light receiving surface 91 of the solar cells 9 mounted on the conveyor belt is directed upward. Further, the upper and lower sides of the transfer device 5 are arranged such that illumination light of the first illumination device 2 disposed below the transfer device 5 is irradiated from below to the solar battery cells 9 stopped at the inspection position. An opening communicating with the direction is provided.
また、太陽電池セル9が固定されて、第1照明装置2、第2照明装置3A、及び撮像ユニット4が進行方向X1(あるいは進行方向X1の逆方向)に移動する構成でもよい。
Alternatively, the solar cell 9 may be fixed, and the first lighting device 2, the second lighting device 3A, and the imaging unit 4 may move in the traveling direction X1 (or in the opposite direction to the traveling direction X1).
そして、検査システムA1は、検査位置に停止した太陽電池セル9に対して、以下の検査処理を実行する。
And inspection system A1 performs the following inspection processing to photovoltaic cell 9 which stopped at the inspection position.
まず、第1照明装置2は、搬送装置5の下方に配置されている。第1照明装置2は、検査位置に停止している太陽電池セル9に対して下方から照明光Lt1を照射する。そして、太陽電池セル9の下面に入射した照明光Lt1は、太陽電池セル9内を透過して、太陽電池セル9の受光面91から透過光Lt11として上方へ出射する。すなわち、第1照明装置2は、太陽電池セル9を透過した光である透過光Lt11を生成するための光源である。照明光Lt1の波長は、太陽電池セル9内を透過する効率が比較的高くなる900-1300nmの範囲内であることが好ましい。本実施形態では、照明光Lt1の波長は950nmであり、照明光Lt1は近赤外線に相当する。なお、透過光Lt11の波長は、照明光Lt1の波長と等しくなる。
First, the first lighting device 2 is disposed below the transport device 5. The first lighting device 2 emits illumination light Lt1 from below to the solar battery cell 9 stopped at the inspection position. And illumination light Lt1 which injected into the lower surface of the photovoltaic cell 9 permeate | transmits the inside of the photovoltaic cell 9, and radiate | emits upwards from the light-receiving surface 91 of the photovoltaic cell 9 as the transmitted light Lt11. That is, the first lighting device 2 is a light source for generating the transmitted light Lt11 which is the light transmitted through the solar battery cell 9. The wavelength of the illumination light Lt1 is preferably in the range of 900-1300 nm at which the efficiency of transmission through the solar battery cell 9 is relatively high. In the present embodiment, the wavelength of the illumination light Lt1 is 950 nm, and the illumination light Lt1 corresponds to near infrared light. The wavelength of the transmitted light Lt11 is equal to the wavelength of the illumination light Lt1.
第2照明装置3Aは、太陽電池セル9の発光を生じさせる発光発生装置3の一形態である。第2照明装置3Aは、搬送装置5の上方に配置されている。第2照明装置3Aは、検査位置に停止している太陽電池セル9に対して上方から励起光Lt2を照射する。そして、励起光Lt2を照射された太陽電池セル9は、フォトルミネッセンス(Photoluminescence:PL)によって光を放出し、発光Lt21を発する。すなわち、第2照明装置3Aは、太陽電池セル9をPL発光させて、発光Lt21を生成するための光源である。本実施形態において、励起光Lt2の波長は630nmであり、励起光Lt2は赤色光に相当する。そして、太陽電池セル9のPL発光による発光Lt21の波長は、1000-1100nmの範囲内にほぼ収まる。
The second lighting device 3 </ b> A is an embodiment of the light emission generation device 3 that causes the solar cell 9 to emit light. The second lighting device 3 </ b> A is disposed above the transport device 5. The second lighting device 3A emits excitation light Lt2 from above to the solar battery cell 9 stopped at the inspection position. Then, the solar battery cell 9 irradiated with the excitation light Lt2 emits light by photoluminescence (PL) to emit a light emission Lt21. That is, the second lighting device 3A is a light source for causing the solar battery cell 9 to emit PL light to generate the light emission Lt21. In the present embodiment, the wavelength of the excitation light Lt2 is 630 nm, and the excitation light Lt2 corresponds to red light. The wavelength of light emission Lt21 due to PL light emission of the solar battery cell 9 substantially falls within the range of 1000-1100 nm.
なお、図1、図2の検査システムA1は、1つの第1照明装置2、及び2つの第2照明装置3Aを備えているが、第1照明装置2及び第2照明装置3Aの各台数は、特定の数に限定されない。
In addition, although inspection system A1 of FIG. 1, FIG. 2 is equipped with one 1st illuminating device 2 and two 2nd illuminating devices 3A, each number of the 1st illuminating devices 2 and 2nd illuminating devices 3A is Not limited to a specific number.
撮像ユニット4は、第1撮像装置41、第2撮像装置42、及びフィルタ42aを備える。第1撮像装置41及び第2撮像装置42は、搬送装置5の上方にそれぞれ配置されている。第1撮像装置41及び第2撮像装置42は、検査位置に停止している太陽電池セル9の受光面91を上方からそれぞれ撮像する。フィルタ42aは第2撮像装置42に設けられている。フィルタ42aは、励起光Lt2を減衰させ、発光Lt21を通過させる。例えば、本実施形態のフィルタ42aは、波長が900nm未満の光を減衰させ、波長が900nm以上の光を通過させる。そして、第2撮像装置42は、フィルタ42aを通過した光を受光して撮像する。第2撮像装置42は、フィルタ42aによって、励起光Lt2の受光量に比べて発光Lt21の受光量を多くすることができる。
The imaging unit 4 includes a first imaging device 41, a second imaging device 42, and a filter 42a. The first imaging device 41 and the second imaging device 42 are respectively disposed above the transport device 5. The first imaging device 41 and the second imaging device 42 respectively image the light receiving surface 91 of the solar battery cell 9 stopped at the inspection position from above. The filter 42 a is provided in the second imaging device 42. The filter 42 a attenuates the excitation light Lt 2 and passes the light emission Lt 21. For example, the filter 42 a according to the present embodiment attenuates light having a wavelength of less than 900 nm and transmits light having a wavelength of 900 nm or more. And the 2nd imaging device 42 light-receives the light which passed the filter 42a, and images it. The second imaging device 42 can increase the light reception amount of the light emission Lt 21 by the filter 42 a compared to the light reception amount of the excitation light Lt 2.
そして、第1撮像装置41及び第2撮像装置42のそれぞれは、白黒の静止画を撮像するカメラであり、1つの太陽電池セル9の全体を撮像範囲内に収めるように配置されている。第1撮像装置41及び第2撮像装置42が撮像した各画像は、濃淡レベルが例えば256段階に設定された濃淡画像である。第1撮像装置41は、濃淡画像の情報を、透過画像の情報としてコンピュータシステム1へ出力する。第2撮像装置42は、濃淡画像の情報を、PL発光画像の情報としてコンピュータシステム1へ出力する。なお、第1撮像装置41及び第2撮像装置42のそれぞれは、カラー画像を撮像するカメラであってもよい。
And each of the 1st imaging device 41 and the 2nd imaging device 42 is a camera which images a black-and-white still picture, and is arrange | positioned so that the whole of one photovoltaic cell 9 may be stored in an imaging range. Each of the images captured by the first imaging device 41 and the second imaging device 42 is a grayscale image in which the grayscale level is set to, for example, 256 levels. The first imaging device 41 outputs the information of the gray-scale image to the computer system 1 as the information of the transmission image. The second imaging device 42 outputs the gray scale image information to the computer system 1 as the PL light emission image information. Each of the first imaging device 41 and the second imaging device 42 may be a camera that captures a color image.
第1照明装置2、第2照明装置3A、第1撮像装置41、第2撮像装置42、及び搬送装置5の各動作は、機器制御装置10によって制御される。
The operations of the first lighting device 2, the second lighting device 3A, the first imaging device 41, the second imaging device 42, and the transport device 5 are controlled by the device control device 10.
具体的に、機器制御装置10は、搬送装置5を制御することで、検査対象となる太陽電池セル9をX1方向に移動させて、所定の検査位置にまで移動させる。そして、機器制御装置10は、第1照明装置2を点灯させ、第2照明装置3Aを消灯させているときに、第1撮像装置41に太陽電池セル9の受光面91を撮像させる。この場合、第1撮像装置41は、透過光Lt11を受光して濃淡画像の情報を生成しており、透過光Lt11による濃淡画像の情報を、透過画像の情報としてコンピュータシステム1へ出力する。
Specifically, by controlling the transport device 5, the device control device 10 moves the solar battery cell 9 to be inspected in the X1 direction to the predetermined inspection position. Then, the device control device 10 causes the first imaging device 41 to image the light receiving surface 91 of the solar battery cell 9 when the first lighting device 2 is turned on and the second lighting device 3A is turned off. In this case, the first imaging device 41 receives the transmitted light Lt11 to generate information of a gray image, and outputs the information of the gray image by the transmitted light Lt11 to the computer system 1 as information of a transmitted image.
また、機器制御装置10は、第1照明装置2を消灯させ、第2照明装置3Aを点灯させているときに、第2撮像装置42に太陽電池セル9の受光面91を撮像させる。この場合、第2撮像装置42は、発光Lt21を受光して濃淡画像の情報を生成しており、発光Lt21による濃淡画像の情報を、PL発光画像(発光画像)の情報としてコンピュータシステム1へ出力する。
The device control device 10 causes the second imaging device 42 to image the light receiving surface 91 of the solar battery cell 9 when the first lighting device 2 is turned off and the second lighting device 3A is turned on. In this case, the second imaging device 42 receives the light emission Lt21 to generate information of the gray scale image, and outputs the information of the gray scale image by the light emission Lt21 to the computer system 1 as the information of the PL light emission image (light emission image) Do.
コンピュータシステム1は、機器制御装置10による第1照明装置2、第2照明装置3A、第1撮像装置41、及び第2撮像装置42の各動作を監視し、透過画像の情報及びPL発光画像の情報を受け取る。なお、コンピュータシステム1が、機器制御装置10の機能を有していてもよい。
The computer system 1 monitors each operation of the first lighting device 2, the second lighting device 3A, the first imaging device 41, and the second imaging device 42 by the device control device 10, and transmits information of a transmission image and PL light emission image. Receive information The computer system 1 may have the function of the device control apparatus 10.
コンピュータシステム1は、画像処理用のプログラムを実行することで、透過画像の情報及びPL発光画像の情報に対して、画像処理を施す。さらに、コンピュータシステム1は、画像処理用のプログラムを実行することで、透過画像の情報及びPL発光画像の情報を用いて太陽電池セル9のクラック検査を行うことが好ましい。
The computer system 1 executes an image processing program to perform image processing on information on a transmission image and information on a PL emission image. Furthermore, it is preferable that the computer system 1 executes a program for image processing to perform a crack inspection of the solar battery cell 9 using the information of the transmission image and the information of the PL light emission image.
コンピュータシステム1は、ハードウェアとしてのプロセッサ及びメモリを主構成とする。コンピュータシステム1のメモリ(非一時的記録媒体)に記録されたプログラム(画像処理用のプログラム)をプロセッサが実行することによって、本開示における後述の画像処理システム11の機能が実現される。プログラムは、コンピュータシステム1のメモリに予め記録されていてもよいが、電気通信回線を通じて提供されてもよいし、コンピュータシステム1で読み取り可能なメモリカード、光学ディスク、ハードディスクドライブ等の非一時的記録媒体に記録されて提供されてもよい。コンピュータシステム1のプロセッサは、半導体集積回路(IC)又は大規模集積回路(LSI)を含む1乃至複数の電子回路で構成される。複数の電子回路は、1つのチップに集約されていてもよいし、複数のチップに分散して設けられていてもよい。複数のチップは、1つの装置に集約されていてもよいし、複数の装置に分散して設けられていてもよい。
The computer system 1 mainly includes a processor and memory as hardware. The processor executes the program (program for image processing) recorded in the memory (non-transitory recording medium) of the computer system 1 to realize the function of the image processing system 11 described later in the present disclosure. The program may be pre-recorded in the memory of the computer system 1, but may be provided through a telecommunication line, or may be non-transitory recording such as a memory card, an optical disc, a hard disk drive, etc. readable by the computer system 1. It may be recorded on a medium and provided. The processor of the computer system 1 is configured of one or more electronic circuits including a semiconductor integrated circuit (IC) or a large scale integrated circuit (LSI). The plurality of electronic circuits may be integrated into one chip or may be distributed to a plurality of chips. The plurality of chips may be integrated into one device or may be distributed to a plurality of devices.
そして、コンピュータシステム1は、画像処理用のプログラムを実行することで画像処理システム11として機能する。
The computer system 1 functions as an image processing system 11 by executing a program for image processing.
画像処理システム11は、第1取得部111、第2取得部112、画像処理装置113、及び出力部114を備えており、検査対象の太陽電池セル9にクラック8が生じているか否かを判定する。
The image processing system 11 includes a first acquisition unit 111, a second acquisition unit 112, an image processing device 113, and an output unit 114, and determines whether or not the crack 8 is generated in the solar battery cell 9 to be inspected. Do.
まず、第1取得部111は、第1撮像装置41から透過画像の情報を受け取る。第2取得部112は、第2撮像装置42からPL発光画像の情報を受け取る。そして、画像処理装置113は、第1取得部111から透過画像の情報を受け取り、第2取得部112からPL発光画像の情報を受け取る。
First, the first acquisition unit 111 receives the information of the transmission image from the first imaging device 41. The second acquisition unit 112 receives the information of the PL light emission image from the second imaging device 42. Then, the image processing apparatus 113 receives the information of the transmission image from the first acquisition unit 111, and receives the information of the PL light emission image from the second acquisition unit 112.
画像処理装置113は、位置補正部113a、領域設定部113b、及び検査部113cを備える。
The image processing apparatus 113 includes a position correction unit 113a, an area setting unit 113b, and an inspection unit 113c.
位置補正部113aは、透過画像及びPL発光画像のそれぞれについて、位置補正処理を行う。位置補正処理は、コンピュータシステム1が生成した仮想的な二次元空間における透過画像及びPL発光画像に対してそれぞれ施される。本実施形態の位置補正処理では、透過画像において太陽電池セル9が写っている領域、及びPL発光画像において太陽電池セル9が写っている領域の各向きが基準方向になるように、座標変換処理が行われる。なお、透過画像及びPL発光画像の各位置補正処理の内容は同一であるので、以下の説明では、透過画像及びPL発光画像のそれぞれの位置補正処理として、図5Aに示す濃淡画像G1の位置補正処理について説明する。つまり、以下の説明における濃淡画像G1を透過画像と読み替えれば、透過画像の位置補正処理に相当し、濃淡画像G1をPL発光画像と読み替えれば、PL発光画像の位置補正処理に相当する。
The position correction unit 113a performs position correction processing on each of the transmission image and the PL light emission image. The position correction process is respectively performed on the transmission image and the PL light emission image in the virtual two-dimensional space generated by the computer system 1. In the position correction processing of the present embodiment, coordinate conversion processing is performed so that each direction of the region where the solar battery cells 9 appear in the transmission image and the region where the solar battery cells 9 appear in the PL light emission image becomes the reference direction. Is done. In addition, since the content of each position correction | amendment processing of a permeation | transmission image and PL light emission image is the same, in the following description, position correction | amendment of the grayscale image G1 shown to FIG. The process will be described. That is, reading gray-scale image G1 in the following description as a transmission image corresponds to position correction processing of a transmission image, and reading gray-scale image G1 as a PL light emission image corresponds to position correction processing of a PL light emission image.
濃淡画像G1には、太陽電池セル9が写っており、濃淡画像G1において、太陽電池セル9が写っている領域をセル領域71とする。セル領域71は、太陽電池セル9と同様に、ほぼ四角形状になる。
The solar battery cell 9 is shown in the gray image G1, and in the gray image G1, the region where the solar battery cell 9 is shown is taken as a cell region 71. The cell area 71 has a substantially rectangular shape as in the solar battery cell 9.
位置補正部113aは、太陽電池セル9の濃淡画像G1からセル領域71の四隅の位置を抽出する。位置補正部113aは、濃淡画像G1に対して微分処理または二値化処理を施して、濃淡画像G1内のセル領域71を抽出する。そして、位置補正部113aは、セル領域71の四隅の位置に位置補正用の4個の点P1、P2、P3、P4をそれぞれ配置する。
The position correction unit 113 a extracts the positions of the four corners of the cell area 71 from the gray-scale image G1 of the solar battery cell 9. The position correction unit 113a performs differentiation processing or binarization processing on the grayscale image G1 to extract the cell area 71 in the grayscale image G1. Then, the position correction unit 113a arranges four points P1, P2, P3, and P4 for position correction at positions of four corners of the cell area 71, respectively.
例えば、位置補正部113aは、セル領域71の外周を囲む4辺を抽出しやすいように、濃淡画像G1の各画素の濃淡値を2値化した2値画像G2(図5B参照)を用いて4個の点P1、P2、P3、P4の位置を定める。点P1、P2、P3、P4は、2値画像G2におけるセル領域72(濃淡画像G1のセル領域71に対応する領域)の外周を囲む4辺のうちのフィンガ電極93と平行である2辺と、フィンガ電極93に直交する2辺とを延長して求めた交点である。位置補正部113aは、2値画像G2において4個の点P1、P2、P3、P4の座標を抽出すると、濃淡画像G1において4個の点P1、P2、P3、P4を2値画像G2と同じそれぞれの座標に配置する。そして、位置補正部113aは、濃淡画像G1の4個の点P1、P2、P3、P4を頂点とする四角形が基準方向を向くように、濃淡画像G1内の各画素の座標変換を行う。このとき、位置補正部113aは、濃淡画像G1の4個の点P1、P2、P3、P4のうち予め決められた1つ以上の点を、基準座標に一致させる。
For example, the position correction unit 113a uses a binary image G2 (see FIG. 5B) obtained by binarizing the gray value of each pixel of the gray image G1 so that the four sides surrounding the outer periphery of the cell area 71 can be easily extracted. The positions of four points P1, P2, P3 and P4 are determined. Points P1, P2, P3 and P4 are two sides parallel to finger electrode 93 among four sides surrounding the outer periphery of cell area 72 (an area corresponding to cell area 71 of gray image G1) in binary image G2. These are intersections obtained by extending two sides orthogonal to the finger electrode 93. When the position correction unit 113a extracts the coordinates of four points P1, P2, P3, and P4 in the binary image G2, the four points P1, P2, P3, and P4 in the grayscale image G1 are the same as the binary image G2. Arrange at each coordinate. Then, the position correction unit 113a performs coordinate conversion of each pixel in the grayscale image G1 such that a quadrangle having four points P1, P2, P3, and P4 of the grayscale image G1 as the apex points in the reference direction. At this time, the position correction unit 113a matches one or more predetermined ones of the four points P1, P2, P3, and P4 of the grayscale image G1 with the reference coordinates.
上述の濃淡画像G1に施された位置補正処理が透過画像に施されることで、透過画像におけるセル領域71を基準方向に向けることができる。また、上述の濃淡画像G1に施された位置補正処理がPL発光画像に施されることで、PL発光画像におけるセル領域71を基準方向に向けることができる。言い換えると、位置補正部113aは、仮想的な2次元空間に透過画像及びPL発光画像を生成した場合に、2次元空間の0°方向または180度方向に沿ってフィンガ電極93の撮像領域が延びるように、座標変換処理を行う。この結果、透過画像のセル領域71及びPL発光画像のセル領域71の各向きは同一の所定方向を向いており、位置補正処理が行われなかった場合に比べて、領域設定部113bによる後述の候補領域80及び検査領域81の抽出処理の精度が向上する。
By subjecting the transmission image to the position correction processing applied to the gray image G1, the cell area 71 in the transmission image can be oriented in the reference direction. In addition, the position correction process performed on the gray image G1 described above is performed on the PL light emission image, so that the cell region 71 in the PL light emission image can be oriented in the reference direction. In other words, when the position correction unit 113a generates the transmission image and the PL light emission image in the virtual two-dimensional space, the imaging region of the finger electrode 93 extends along the 0 ° direction or the 180 ° direction of the two-dimensional space. In this way, coordinate conversion processing is performed. As a result, the cell regions 71 of the transmission image and the cell regions 71 of the PL light emission image face the same predetermined direction, which will be described later by the region setting unit 113 b as compared with the case where the position correction processing is not performed. The accuracy of the extraction process of the candidate area 80 and the inspection area 81 is improved.
また、太陽電池セル9に対する第1撮像装置41の相対位置と、太陽電池セル9に対する第2撮像装置42の相対位置とが異なっていても、仮想的な二次元空間における透過画像内のセル領域71及びPL発光画像内のセル領域71の各座標が一致(ほぼ一致)する。
Further, even if the relative position of the first imaging device 41 to the solar battery cell 9 and the relative position of the second imaging device 42 to the solar battery cell 9 are different, the cell region in the transmission image in the virtual two-dimensional space 71 and the coordinates of the cell area 71 in the PL light emission image match (almost match).
位置補正部113aは、上述の位置補正処理を濃淡画像G1に施すことによって、図6に示す補正濃淡画像G3を生成する。なお、濃淡画像G1が透過画像である場合、補正濃淡画像G3は補正透過画像に相当する。濃淡画像G1がPL発光画像である場合、補正濃淡画像G3は補正PL発光画像に相当する。
The position correction unit 113a generates the corrected gray-scale image G3 shown in FIG. 6 by performing the above-described position correction process on the gray-scale image G1. When the gray image G1 is a transmission image, the corrected gray image G3 corresponds to a corrected transmission image. When the grayscale image G1 is a PL light emission image, the corrected grayscale image G3 corresponds to a corrected PL light emission image.
領域設定部113bは、補正濃淡画像G3(補正透過画像及び補正PL発光画像)に鮮鋭化処理を施すことで、クラックが生じている可能性がある候補領域80を定め、さらに候補領域80を囲む検査領域81を定める。
The area setting unit 113b performs a sharpening process on the corrected gray-scale image G3 (corrected transmission image and corrected PL light emission image) to determine a candidate area 80 in which a crack may occur, and further surrounds the candidate area 80. The inspection area 81 is determined.
太陽電池セル9にクラック8が生じている場合、補正濃淡画像G3において候補領域80が延びる方向は、仮想的な二次元空間における45度(225度)あるいは135度(315度)の方向になる。そこで、領域設定部113bは、補正濃淡画像G3内の濃淡値が変化する方向を評価して、仮想的な二次元空間において45度あるいは135度の方向に延びている候補領域80を抽出する。領域設定部113bは、濃淡値が変化する方向を評価するために、2次元のウェーブレット(Wavelet)フィルタ、好ましくは2次元のガボール(Gabor)フィルタを用いている。
When cracks 8 occur in the solar battery cell 9, the direction in which the candidate region 80 extends in the corrected gray-scale image G3 is the direction of 45 degrees (225 degrees) or 135 degrees (315 degrees) in a virtual two-dimensional space . Therefore, the area setting unit 113b evaluates the direction in which the gray value in the corrected gray-scale image G3 changes, and extracts the candidate area 80 extending in the direction of 45 degrees or 135 degrees in the virtual two-dimensional space. The region setting unit 113 b uses a two-dimensional wavelet filter, preferably a two-dimensional Gabor filter, in order to evaluate the direction in which the gray value changes.
2次元のガボールフィルタは、ガボール関数で表されるカーネルを用いる空間フィルタである。ガボール関数は、正弦関数および余弦関数で表される調和関数とガウス関数との積である。したがって、ガボールフィルタはパラメータに角度(角度パラメータ)を含んでいる。ガボールフィルタのカーネルはn画素×n画素であり、nは5以上256以下程度の適宜の範囲で選択される。
The two-dimensional Gabor filter is a spatial filter that uses a kernel represented by a Gabor function. The Gabor function is a product of a harmonic function represented by a sine function and a cosine function and a Gaussian function. Therefore, the Gabor filter includes an angle (angle parameter) in the parameter. The kernel of the Gabor filter is n pixels × n pixels, and n is selected in an appropriate range of about 5 or more and 256 or less.
補正濃淡画像G3に対してガボールフィルタを適用する場合、2次元のガボールフィルタが補正濃淡画像G3の一部に重ねられる。次に、ガボールフィルタと補正濃淡画像G3とが重なった領域で、画素ごとに、補正濃淡画像G3の濃淡値とガボールフィルタの信号値とが乗算され、ガボールフィルタと補正濃淡画像G3とが重なった領域のすべての画素についての乗算値の合計が求められる。このようにして求められた乗算値の合計が、カーネルの中心の画素値になる。すなわち、ガボールフィルタによる濃淡画像の畳み込みが行われる。そのため、カーネルのサイズを決めるnの値は奇数であることが望ましい。補正濃淡画像G3においてガボールフィルタが重なる領域の濃淡値の変化と、ガボールフィルタのパラメータとが所定の関係であるときに、畳み込み演算後の信号値は大きい値になる。畳み込み演算後の信号値を、ガボールフィルタの反応とみなすと、補正濃淡画像G3における濃淡値の変化とガボールフィルタのパラメータとが所定の関係であるときに、ガボールフィルタの反応が強くなると言える。
When the Gabor filter is applied to the corrected gray-scale image G3, a two-dimensional Gabor filter is superimposed on part of the corrected gray-scale image G3. Next, in a region where the Gabor filter and the corrected gray-scale image G3 overlap, the gray-scale value of the corrected gray-scale image G3 is multiplied by the signal value of the Gabor filter for each pixel, and the Gabor filter and the corrected gray-scale image G3 overlap. The sum of the multiplied values for all the pixels in the area is determined. The sum of the multiplication values obtained in this manner becomes the pixel value at the center of the kernel. That is, convolution of the gray-scale image by the Gabor filter is performed. Therefore, it is desirable that the value of n that determines the size of the kernel is an odd number. When the change in the lightness value of the area where the Gabor filters overlap in the corrected light and dark image G3 and the parameter of the Gabor filter have a predetermined relationship, the signal value after the convolution operation becomes a large value. If the signal value after the convolution operation is regarded as the response of the Gabor filter, it can be said that the response of the Gabor filter becomes strong when the change of the gray value in the corrected gray-scale image G3 and the parameter of the Gabor filter have a predetermined relationship.
領域設定部113bは、角度パラメータを45度および135度に設定したガボールフィルタを、位置補正後の補正濃淡画像G3内で走査し、ガボールフィルタを重ねた位置ごとに、ガボール関数による畳み込み演算を行う。すなわち、領域設定部113bは、補正濃淡画像G3に対してガボールウェーブレット変換を行う。ガボールウェーブレット変換が施された補正濃淡画像G3では、濃淡値の変化によって45度あるいは135度の方向に延びていることを表す領域が強調される。ここに、領域設定部113bが用いるガボールフィルタのカーネルは、補正濃淡画像G3よりは小さい。領域設定部113bは、例えば41画素×41画素程度のサイズのガボールフィルタを用いる。
The area setting unit 113b scans the Gabor filter whose angle parameter is set at 45 degrees and 135 degrees in the corrected gray-scale image G3 after position correction, and performs convolution calculation by the Gabor function for each position where the Gabor filter is overlapped. . That is, the area setting unit 113b performs Gabor wavelet transform on the corrected gray-scale image G3. In the corrected gray-scale image G3 on which Gabor wavelet transformation has been performed, a region representing extension in the direction of 45 degrees or 135 degrees is emphasized by the change in gray value. Here, the kernel of the Gabor filter used by the region setting unit 113b is smaller than the corrected gray-scale image G3. The area setting unit 113 b uses, for example, a Gabor filter having a size of about 41 pixels × 41 pixels.
なお、単結晶シリコンのへき開の方向は、水平方向に対して45度または135度である。そこで、ガボールフィルタの角度パラメータを45度および135度に設定する。この結果、補正濃淡画像G3での濃淡値の変化が、へき開の方向に直交する方向で大きくなる。
Note that the cleavage direction of single crystal silicon is 45 degrees or 135 degrees with respect to the horizontal direction. Therefore, the Gabor filter angle parameters are set to 45 degrees and 135 degrees. As a result, the change of the gray value in the corrected gray image G3 becomes large in the direction orthogonal to the direction of cleavage.
ガボールフィルタを走査する際に、ガボールフィルタを1回移動させる距離は、ガボールフィルタの1辺の画素数よりも小さく設定される。ガボールフィルタを1回移動させる距離は、最小では1画素でもよい。ガボールフィルタを1回移動させる距離が大きくなるほど、走査に要する時間は短縮されるが、候補領域を見落とす確率が高くなる。そこで、ガボールフィルタを1回移動させる距離は、時間と精度との関係で適宜に決められる。
When scanning the Gabor filter, the distance for moving the Gabor filter once is set smaller than the number of pixels on one side of the Gabor filter. The distance for moving the Gabor filter once may be at least one pixel. As the distance for moving the Gabor filter once increases, the time required for scanning decreases, but the probability of missing a candidate area increases. Therefore, the distance by which the Gabor filter is moved once is appropriately determined by the relationship between time and accuracy.
そして、領域設定部113bは、ガボールウェーブレット変換を施した補正濃淡画像G3に2値化処理及び微分処理の少なくとも一方をさらに施して、鮮鋭化画像を生成する。鮮鋭化画像では、濃淡値の変化によって45度あるいは135度の方向に延びていることを表す領域がクラックの候補領域としてさらに強調される。
Then, the region setting unit 113b further performs at least one of binarization processing and differentiation processing on the corrected gray-scale image G3 subjected to Gabor wavelet transform to generate a sharpened image. In a sharpened image, a region representing extension in the direction of 45 degrees or 135 degrees is further emphasized as a candidate region of a crack due to a change in gray value.
図7は、補正濃淡画像G3にガボールウェーブレット変換を施した後に二値化処理をさらに施した鮮鋭化画像G4(二値画像)の一部を示す。図7では、鮮鋭化画像G4のセル領域73(濃淡画像G1のセル領域71に対応する領域)において、45度あるいは135度の方向に延びているクラックの候補となる暗画素または明画素の画素群が、候補領域80として強調されている。鮮鋭化画像G4では、複数の候補領域80が存在していてもよい。
FIG. 7 shows a part of a sharpened image G4 (binary image) in which the corrected gray-scale image G3 is subjected to Gabor wavelet transformation and then binarized. In FIG. 7, in the cell area 73 of the sharpened image G4 (area corresponding to the cell area 71 of the gray image G1), a pixel of a dark pixel or a bright pixel which is a candidate for a crack extending in the 45.degree. Groups are highlighted as candidate regions 80. In the sharpened image G4, a plurality of candidate areas 80 may exist.
そして、領域設定部113bは、鮮鋭化画像G4において、候補領域80に外接する外接矩形D1(図7参照)を設定する。候補領域80に外接する外接矩形D1は、鮮鋭化画像G4において二次元空間の0度(または180度)方向、及び90度(または270度)方向とそれぞれ平行な辺を持つように設定される。候補領域80を構成する全ての画素が連結しているとは限らず、画素間に数画素程度の隙間があってもよい。
Then, the region setting unit 113b sets a circumscribed rectangle D1 (see FIG. 7) circumscribing the candidate region 80 in the sharpened image G4. The circumscribed rectangle D1 circumscribing the candidate area 80 is set to have sides parallel to the 0 degree (or 180 degree) direction and the 90 degree (or 270 degree) direction of the two-dimensional space in the sharpened image G4. . Not all the pixels constituting the candidate area 80 are connected, but there may be a gap of several pixels between the pixels.
そして、領域設定部113bは、鮮鋭化画像G4における外接矩形D1を、補正濃淡画像G3(補正透過画像及び補正PL発光画像)に適用する。つまり、領域設定部113bは、鮮鋭化画像G4において外接矩形D1が位置する座標と、補正濃淡画像G3において外接矩形D1が位置する座標とを同一座標とする。そして、領域設定部113bは、補正濃淡画像G3において外接矩形D1内の領域を検査領域81に設定する。
Then, the region setting unit 113b applies the circumscribed rectangle D1 in the sharpened image G4 to the corrected gray-scale image G3 (corrected transmission image and corrected PL light emission image). That is, the area setting unit 113b sets the coordinates at which the circumscribed rectangle D1 is located in the sharpened image G4 and the coordinates at which the circumscribed rectangle D1 is located in the corrected grayscale image G3 as the same coordinates. Then, the area setting unit 113b sets an area within the circumscribed rectangle D1 in the corrected gray-scale image G3 as the inspection area 81.
すなわち、補正濃淡画像G3が補正透過画像である場合、補正透過画像に検査領域81が設定される。また、補正濃淡画像G3が補正PL発光画像である場合、補正PL発光画像に検査領域81が設定される。そして、検査領域81が設定された補正透過画像、及び検査領域81が設定された補正PL発光画像は、検査部113cに引き渡される。
That is, when the corrected gray-scale image G3 is a corrected transmission image, an inspection area 81 is set in the corrected transmission image. When the corrected gray-scale image G3 is a corrected PL light emission image, an inspection area 81 is set in the corrected PL light emission image. Then, the corrected transmission image in which the inspection area 81 is set and the corrected PL light emission image in which the inspection area 81 is set are delivered to the inspection unit 113c.
検査部113cは、補正透過画像の検査領域81、及び補正PL発光画像の検査領域81に対して認識アルゴリズムを実行することで、検査対象である太陽電池セル9にクラック8が生じているか否かを判定する。
The inspection unit 113c executes a recognition algorithm on the inspection area 81 of the corrected transmission image and the inspection area 81 of the correction PL light emission image to determine whether or not the crack 8 is generated in the solar cell 9 to be inspected. Determine
図8Aは、補正濃淡画像G3として補正透過画像G3aの一部を示しており、セル領域71a(濃淡画像G1のセル領域71に対応する領域)に候補領域80aが写っており、候補領域80aを含む検査領域81aが設定されている。図8Bは、補正濃淡画像G3として補正PL発光画像G3bの一部を示しており、セル領域71b(濃淡画像G1のセル領域71に対応する領域)に候補領域80bが写っており、候補領域80bを含む検査領域81bが設定されている。補正透過画像G3a及び補正PL発光画像G3bには、太陽電池セル9のエッチングむら、エッチングの模様、表面膜の擦過痕、及び汚れなどがノイズとしてそれぞれ写っている。しかしながら、補正透過画像G3aと補正PL発光画像G3bとを比較すると、ノイズの量、及び分布などのノイズ濃度が互いに異なる。例えば、補正透過画像G3aでは、太陽電池セル9のエッチングむら、及びエッチングの模様によるノイズが写りやすい。また、補正PL発光画像G3bでは、表面膜の擦過痕によるノイズが写りやすい。
FIG. 8A shows a part of the corrected transmission image G3a as the corrected gray-scale image G3. The candidate area 80a is shown in the cell area 71a (an area corresponding to the cell area 71 of the gray-scale image G1). An inspection area 81a to be included is set. FIG. 8B shows a part of the corrected PL light-emitting image G3b as the corrected gray-scale image G3. The candidate area 80b is shown in the cell area 71b (an area corresponding to the cell area 71 of the gray-scale image G1). An inspection area 81 b including the above is set. In the corrected transmission image G3a and the corrected PL light emission image G3b, etching unevenness of the solar battery cell 9, etching pattern, abrasion marks of the surface film, dirt, and the like are respectively reflected as noise. However, when the corrected transmission image G3a and the correction PL light emission image G3b are compared, the noise concentration and the noise density such as the distribution are different from each other. For example, in the corrected transmission image G3a, etching unevenness of the solar battery cell 9 and noise due to the etching pattern are likely to be captured. In addition, in the corrected PL light emission image G3b, noise due to abrasion marks on the surface film is likely to appear.
そこで、本実施形態の検査部113cは、ノイズ濃度が互いに異なる補正透過画像G3a及び補正PL発光画像G3bを用いて、太陽電池セル9にクラック8が生じているか否かを判定する。この結果、検査部113cは、補正透過画像G3a及び補正PL発光画像G3bの各特徴を利用、又は補完することによって、クラック検査の判定精度を従来に比べて向上させることができる。すなわち、検査部113cは、太陽電池セル9の撮像画像に基づいて、太陽電池セル9のクラック8を精度よく判別し、クラック8と他の要素(ノイズ)とを精度よく区別することができる。他の要素には、エッチングむら、エッチング模様、表面膜の擦過痕、及び汚れなどがある。
Therefore, the inspection unit 113c according to the present embodiment determines whether or not the crack 8 is generated in the solar battery cell 9 using the corrected transmission image G3a and the correction PL light emission image G3b having different noise densities. As a result, the inspection unit 113c can improve the determination accuracy of the crack inspection as compared to the prior art by using or complementing the features of the corrected transmission image G3a and the corrected PL light emission image G3b. That is, based on the captured image of the solar battery cell 9, the inspection unit 113c can accurately determine the crack 8 of the solar battery cell 9, and can accurately distinguish the crack 8 from other elements (noises). Other factors include uneven etching, etched patterns, scratches on the surface film, and dirt.
本実施形態において、検査部113cは、機械学習、特にディープラーニング(Deep Learning)によって構築された認識アルゴリズムを実行することが好ましい。ディープラーニングによって構築された認識アルゴリズムは、予め、多層構造のニューラルネットワークを用いて、クラック8が生じている太陽電池セル9の透過画像及びPL発光画像、クラック8が生じていない太陽電池セル9の透過画像及びPL発光画像などの各データを学習モデルとするディープラーニングによって構築される。そして、膨大な数の学習モデル用いたディープラーニングによって、補正透過画像G3a、及び補正PL発光画像G3bにそれぞれ写っている候補領域80a,80bがクラック8に対応するか否か(すなわち、太陽電池セル9にクラック8が生じているか否か)を判定するための特徴量が抽出され、認識アルゴリズムが構築される。検査部113cは、ディープラーニングによる認識アルゴリズムを実行することで、クラック検査処理の精度がより向上する。
In the present embodiment, the inspection unit 113c preferably executes a recognition algorithm constructed by machine learning, in particular, deep learning. In the recognition algorithm constructed by deep learning, a transmission image and a PL light emission image of the solar battery cell 9 in which a crack 8 is generated using a neural network of a multilayer structure in advance, the solar battery cell 9 in which the crack 8 is not generated. It is constructed by deep learning in which each data such as transmission image and PL emission image is used as a learning model. Then, whether or not the candidate regions 80a and 80b respectively shown in the corrected transmission image G3a and the corrected PL emission image G3b correspond to the cracks 8 by deep learning using a huge number of learning models (ie, solar cells) A feature amount for determining whether or not a crack 8 has occurred in 9 is extracted, and a recognition algorithm is constructed. The inspection unit 113 c further improves the accuracy of the crack inspection process by executing the deep learning recognition algorithm.
例えば、検査部113cは、図9に示すニューラルネットワークNN1を実装されている。この場合、ニューラルネットワークNN1に、検査領域81aが設定された補正透過画像G3a、及び検査領域81bが設定された補正PL発光画像G3bの各情報が入力される。したがって、検査部113cは、複数のニューラルネットワークを実装される場合に比べて、簡易な構成になる。
For example, the inspection unit 113c is implemented with a neural network NN1 shown in FIG. In this case, information of the corrected transmission image G3a in which the inspection area 81a is set and the corrected PL light emission image G3b in which the inspection area 81b is set is input to the neural network NN1. Therefore, the inspection unit 113c has a simpler configuration than when a plurality of neural networks are mounted.
ニューラルネットワークNN1は、畳み込み層101、102、プーリング層103,104、結合層105、インセプションモジュール106、結合層107、及び全結合層108を備える畳み込みニューラルネットワーク(Convolutional Neural Network)である。
The neural network NN1 is a convolutional neural network (Convolutional Neural Network) including convolutional layers 101 and 102, pooling layers 103 and 104, a coupling layer 105, an inception module 106, a coupling layer 107, and a total coupling layer 108.
畳み込み層101は、検査領域81aが設定された補正透過画像G3aの情報を入力されて、補正透過画像G3aの検査領域81aとクラック8の特徴を表す画像パッチとの畳み込み演算を行う畳み込みフィルタである。畳み込み層101による畳み込み演算の結果は、検査領域81aと同一サイズのデータとして、畳み込み層101から出力される。畳み込み層102は、検査領域81bが設定された補正PL発光画像G3bを入力されて、補正PL発光画像G3bの検査領域81bとクラック8の特徴を表す画像パッチとの畳み込み演算を行う畳み込みフィルタである。畳み込み層102による畳み込み演算の結果は、検査領域81bと同一サイズのデータとして、畳み込み層102から出力される。
The convolution layer 101 is a convolution filter which receives the information of the corrected transmission image G3a in which the inspection region 81a is set, and performs a convolution operation of the inspection region 81a of the correction transmission image G3a and the image patch representing the feature of the crack 8. . The result of the convolution operation by the convolution layer 101 is output from the convolution layer 101 as data of the same size as the inspection area 81 a. The convolution layer 102 is a convolution filter that receives the corrected PL light emission image G3b in which the inspection area 81b is set, and performs a convolution operation of the inspection area 81b of the corrected PL light emission image G3b and the image patch representing the feature of the crack 8. . The result of the convolution operation by the convolution layer 102 is output from the convolution layer 102 as data of the same size as the inspection area 81 b.
プーリング層103は、畳み込み層101が出力したデータを縮小し、プーリング層104は、畳み込み層102が出力したデータを縮小する。結合層105は、プーリング層103,104の各出力を、インセプションモジュール106へ引き渡す。インセプションモジュール106では、複数の畳み込みフィルタを並列に設けて、複数の畳み込みフィルタのそれぞれが畳み込み演算を行う。結合層107は、インセプションモジュール106の各出力を、全結合層108へ引き渡す。
The pooling layer 103 reduces the data output by the convolutional layer 101, and the pooling layer 104 reduces the data output by the convolutional layer 102. The bonding layer 105 delivers each output of the pooling layers 103 and 104 to the inception module 106. In the inception module 106, a plurality of convolution filters are provided in parallel, and each of the plurality of convolution filters performs a convolution operation. Bonding layer 107 delivers each output of inception module 106 to all bonding layers 108.
全結合層108は、インセプションモジュール106の各出力に基づいて、検査領域81a、81bに写っている候補領域80a,80bが、太陽電池セル9のクラック8に対応するか否か(すなわち、太陽電池セル9にクラック8が生じているか否か)を判定する。
In the total bonding layer 108, whether or not the candidate areas 80a and 80b reflected in the inspection areas 81a and 81b correspond to the cracks 8 of the solar cells 9 based on the respective outputs of the inception module 106 (ie, solar cells It is determined whether or not the crack 8 is generated in the cell 9).
画像処理システム11は出力部114を備えている。出力部114は、クラック検査の結果として、検査部113cの判定結果、クラック8に対応する候補領域80の箇所が示された太陽電池セル9の画像、及び判定過程などの各情報を含む画像データを作成し、表示装置6へ出力する。表示装置6は、受信した画像データに基づいて、クラック検査の結果を表示する。表示装置6は、液晶表示器、有機EL表示器 EL:Electroluminescence)、及びCRT(Cathode Ray Tube)などのいずれかである。
The image processing system 11 includes an output unit 114. The output unit 114 outputs image data including an image of the solar battery cell 9 in which the location of the candidate area 80 corresponding to the crack 8 is indicated, and each information such as the determination process, as a result of the crack inspection. Are output to the display device 6. The display device 6 displays the result of the crack inspection based on the received image data. The display device 6 is any one of a liquid crystal display, an organic EL display EL: Electroluminescence), a CRT (Cathode Ray Tube), and the like.
また、検査部113cは、検査領域81aが設定された補正透過画像G3aの情報が入力される第1ニューラルネットワーク、及び検査領域81bが設定された補正PL発光画像G3bの各情報が入力される第2ニューラルネットワークを備えていてもよい。この場合、検査部113cは、第1ニューラルネットワークの判定結果、及び第2ニューラルネットワークの判定結果に基づいて、1つの判定結果を作成して出力する最終判定部を有する。最終判定部は、ニューラルネットワークでもよいし、2入力の論理演算を行う演算器であってもよい。
In addition, the inspection unit 113c receives each information of the first neural network to which the information of the corrected transmission image G3a in which the inspection area 81a is set is input and the correction PL light emission image G3b in which the inspection area 81b is set. 2 A neural network may be provided. In this case, the inspection unit 113c has a final determination unit that creates and outputs one determination result based on the determination result of the first neural network and the determination result of the second neural network. The final determination unit may be a neural network or an arithmetic unit that performs a logical operation of two inputs.
また、検査部113cは、サポートベクターマシン(Support Vector Machine:SVM)を実装していてもよい。サポートベクターマシンは、検査領域81aが設定された補正透過画像G3a、及び検査領域81bが設定された補正透過画像G3bの各情報を入力される。そして、サポートベクターマシンは、候補領域80a,80bが、太陽電池セル9のクラック8に対応するか否かを判定する。なお、検査部113cは、検査領域81aが設定された補正透過画像G3a、及び検査領域81bが設定された補正透過画像G3bの各特徴量を予め求め、これらの特徴量をサポートベクターマシンに入力することが好ましい。
In addition, the inspection unit 113c may be implemented with a support vector machine (SVM). The support vector machine receives the information of the corrected transmission image G3a in which the inspection area 81a is set and the correction transmission image G3b in which the inspection area 81b is set. Then, the support vector machine determines whether the candidate areas 80 a and 80 b correspond to the cracks 8 of the solar battery cell 9. The inspection unit 113c obtains in advance each feature amount of the corrected transmission image G3a in which the inspection region 81a is set and the correction transmission image G3b in which the inspection region 81b is set, and inputs these feature amounts to the support vector machine. Is preferred.
上述の画像処理システム11による画像処理方法をまとめると、図10のフローチャートのようになる。
The image processing method by the above-described image processing system 11 is summarized as a flowchart of FIG.
まず、第1取得部111は、第1撮像装置41から透過画像の情報を受け取る。第2取得部112は、第2撮像装置42からPL発光画像の情報を受け取る。すなわち、画像処理システム11は、透過画像の情報及びPL発光画像の情報を受け取る(ステップS1)。そして、画像処理システム11は、上述の画像処理装置113(位置補正部113a、領域設定部113b、及び検査部113c)による画像処理を実行する(ステップS2)。
First, the first acquisition unit 111 receives the information of the transmission image from the first imaging device 41. The second acquisition unit 112 receives the information of the PL light emission image from the second imaging device 42. That is, the image processing system 11 receives the information of the transmission image and the information of the PL emission image (step S1). Then, the image processing system 11 executes image processing by the above-described image processing apparatus 113 (the position correction unit 113a, the area setting unit 113b, and the inspection unit 113c) (step S2).
また、図11に示す検査システムA2のように、撮像ユニット4が、第2撮像装置42及びフィルタ42aを備え、第1撮像装置41を備えていない構成であってもよい。この場合、フィルタ42aは、透過光Lt11及び発光Lt21を通過させ、励起光Lt2を減衰させる。検査システムA2は、検査システムA1に比べて、撮像装置の数を減らすことができ、低コスト化、及びシステム構成の簡略化を図ることができる。
Further, as in the inspection system A2 shown in FIG. 11, the imaging unit 4 may be configured to include the second imaging device 42 and the filter 42 a and not include the first imaging device 41. In this case, the filter 42a transmits the transmitted light Lt11 and the light emission Lt21 and attenuates the excitation light Lt2. The inspection system A2 can reduce the number of imaging devices as compared with the inspection system A1, and can achieve cost reduction and simplification of the system configuration.
また、図12に示す検査システムA3では、太陽電池セル9の発光を生じさせる発光発生装置3の別形態として、電源装置3Bを備えている。電源装置3Bは、太陽電池セル9に電力を供給して、太陽電池セル9に順方向の電流を流す。順方向の電流を供給された太陽電池セル9は、エレクトロルミネッセンス(Electroluminescence:EL)によって光を放出し、発光Lt31を発する。すなわち、電源装置3Bは、太陽電池セル9をEL発光させて、発光Lt31を生成する。
Moreover, in test | inspection system A3 shown in FIG. 12, the power supply device 3B is provided as another form of the light emission generator 3 which makes light emission of the photovoltaic cell 9 occur. The power supply device 3 </ b> B supplies power to the solar battery cells 9 to flow forward current in the solar battery cells 9. The solar battery cell 9 to which the forward current is supplied emits light by electroluminescence (EL) to emit light emission Lt 31. That is, the power supply device 3B causes the solar battery cell 9 to emit light to generate the light emission Lt31.
そして、機器制御装置10は、搬送装置5を制御することで、検査対象となる太陽電池セル9をX1方向に移動させて、所定の検査位置にまで移動させる。そして、機器制御装置10は、第1照明装置2を消灯させているときに、電源装置3Bから太陽電池セル9に電力を供給させ、第2撮像装置42に太陽電池セル9の受光面91を撮像させる。この場合、第2撮像装置42は、発光Lt31を受光して濃淡画像の情報を生成しており、発光Lt31による濃淡画像の情報を、EL発光画像(発光画像)の情報としてコンピュータシステム1へ出力する。なお、検査システムA3では、フィルタ42a(図1参照)を備える必要がない。
Then, the device control device 10 controls the transport device 5 to move the solar battery cell 9 to be inspected in the X1 direction to the predetermined inspection position. Then, when the first lighting device 2 is turned off, the device control device 10 causes the power supply device 3B to supply power to the solar battery cell 9, and causes the second imaging device 42 to receive the light receiving surface 91 of the solar battery cell 9. Take an image. In this case, the second imaging device 42 receives the light emission Lt31 and generates information of a gray scale image, and outputs the information of the gray scale image by the light emission Lt31 to the computer system 1 as information of an EL light emission image (light emission image) Do. The inspection system A3 does not have to include the filter 42a (see FIG. 1).
コンピュータシステム1は、上述のPL発光画像の情報と同様に、EL発光画像の情報に対して画像処理を施す。EL発光画像の情報に対して施される画像処理の内容は、PL発光画像の情報に対して施される画像処理の内容と同じであるので、説明は省略する。
The computer system 1 performs image processing on the information on the EL light emission image as in the case of the information on the PL light emission image described above. The content of the image processing performed on the information of the EL light emission image is the same as the content of the image processing performed on the information of the PL light emission image, and thus the description thereof is omitted.
したがって、検査システムA3も、太陽電池セル9の撮像画像に基づいて、太陽電池セル9のクラック8を精度よく判別できる。そして、検査システムA3は、クラック8と、エッチングむら、エッチング模様、表面膜の擦過痕、及び汚れなどの他の要素(ノイズ)とを精度よく区別することができる。
Therefore, inspection system A3 can also distinguish crack 8 of photovoltaic cell 9 accurately based on the image pick-up picture of photovoltaic cell 9. Then, the inspection system A3 can accurately distinguish the crack 8 from other elements (noise) such as etching unevenness, etching patterns, abrasion marks of the surface film, and dirt.
上述の実施形態に係る第1の態様の画像処理システム(11)は、太陽電池セル(9)の画像に基づいて太陽電池セル(9)のクラック(8)を検査するための画像処理システムである。画像処理システム(11)は、第1取得部(111)と、第2取得部(112)と、画像処理装置(113)と、を備える。第1取得部(111)は、太陽電池セル(9)を透過した透過光(Lt11)による太陽電池セル(9)の画像である透過画像(濃淡画像G1)の情報を取得する。第2取得部(112)は、太陽電池セル(9)の発光(Lt21またはLt31)による太陽電池セル(9)の画像である発光画像(濃淡画像G1)の情報を取得する。画像処理装置(113)は、透過画像の情報及び発光画像の各情報を受け取って画像処理を行うことで、太陽電池セル(9)にクラック(8)が生じているか否かを判定する。
The image processing system (11) according to the first aspect of the present invention is an image processing system for inspecting a crack (8) of a solar cell (9) based on an image of the solar cell (9). is there. The image processing system (11) includes a first acquisition unit (111), a second acquisition unit (112), and an image processing apparatus (113). The first acquisition unit (111) acquires information of a transmission image (grayscale image G1) which is an image of the solar battery cell (9) by the transmitted light (Lt11) transmitted through the solar battery cell (9). The second acquisition unit (112) acquires information of a light emission image (grayscale image G1) that is an image of the solar battery cell (9) by the light emission (Lt21 or Lt31) of the solar battery cell (9). The image processing apparatus (113) receives the information of the transmission image and the respective information of the light emission image and performs image processing to determine whether or not a crack (8) has occurred in the solar battery cell (9).
したがって、画像処理システム(11)は、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、画像処理システム(11)は、クラック(8)と、エッチングむら、エッチング模様、表面膜の擦過痕、汚れなどの他の要素(ノイズ)とを精度よく区別することができる。
Therefore, the image processing system (11) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). Then, the image processing system (11) can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks of the surface film, dirt and the like.
また、実施形態に係る第2の態様の画像処理システム(11)では、第1の態様において、前記発光画像は、励起光(Lt2)の照射によって発光している太陽電池セル(9)が撮像されたPL発光画像(濃淡画像G1)であることが好ましい。
In the image processing system (11) according to the second aspect of the embodiment, in the first aspect, the light emission image is captured by the solar battery cell (9) emitting light by irradiation of the excitation light (Lt2). It is preferable that the obtained PL light emission image (grayscale image G1).
したがって、画像処理システム(11)は、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、画像処理システム(11)は、クラック(8)と他の要素とを精度よく区別することができる。
Therefore, the image processing system (11) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). And an image processing system (11) can distinguish a crack (8) and other elements with sufficient accuracy.
また、実施形態に係る第3の態様の画像処理システム(11)では、第1の態様において、前記発光画像は、電流を供給されて発光している太陽電池セル(9)が撮像されたEL発光画像(濃淡画像G1)であることが好ましい。
In the image processing system (11) of the third aspect according to the embodiment, in the first aspect, the light emitting image is an EL from which a solar battery cell (9) emitting light is supplied by being supplied with current. It is preferable that it is a luminescent image (grayscale image G1).
したがって、画像処理システム(11)は、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、画像処理システム(11)は、クラック(8)と他の要素とを精度よく区別することができる。
Therefore, the image processing system (11) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). And an image processing system (11) can distinguish a crack (8) and other elements with sufficient accuracy.
また、実施形態に係る第4の態様の画像処理システム(11)では、第1乃至第3のいずれか一つの態様において、透過画像及び発光画像はそれぞれ濃淡画像である。そして、画像処理装置(113)は、位置補正部(113a)と、領域設定部(113b)と、検査部(113c)と、を備えることが好ましい。位置補正部(113a)は、透過画像において太陽電池セル(9)が写っているセル領域(71)、及び発光画像において太陽電池セル(9)が写っているセル領域(71)のそれぞれが所定方向に向くように、透過画像及び発光画像を補正する位置補正処理を行う。位置補正部(113a)は、位置補正処理が施された透過画像である補正透過画像(G3a)、及び位置補正処理が施された発光画像である補正発光画像(例えば補正PL発光画像G3b)を生成する。領域設定部(113b)は、補正透過画像(G3a)及び補正発光画像において、クラック(8)が写っていると推定される検査領域(81a,81b)の情報をそれぞれ生成する。検査部(113c)は、検査領域(81a,81b)がそれぞれ設定された補正透過画像(G3a)及び補正発光画像に基づいて、太陽電池セル(9)にクラック(8)が生じているか否かを判定する。
In the image processing system (11) of the fourth aspect according to the embodiment, in any one of the first to third aspects, the transmission image and the light emission image are gray-scale images, respectively. The image processing apparatus (113) preferably includes a position correction unit (113a), an area setting unit (113b), and an inspection unit (113c). In the position correction unit (113a), the cell region (71) in which the solar battery cell (9) is shown in the transmission image, and the cell region (71) in which the solar battery cell (9) is shown in the light emission image are each specified. A position correction process is performed to correct the transmission image and the light emission image so as to face in the direction. The position correction unit (113a) corrects the corrected transmission image (G3a), which is a transmission image subjected to position correction processing, and the corrected light emission image (for example, a correction PL light emission image G3b), which is a light emission image subjected to position correction processing. Generate The area setting unit (113b) generates information of an inspection area (81a, 81b) in which it is estimated that the crack (8) appears in the corrected transmission image (G3a) and the correction emission image. The inspection unit (113c) determines whether or not a crack (8) has occurred in the solar battery cell (9) based on the corrected transmission image (G3a) and the correction light emission image in which the inspection regions (81a, 81b) are respectively set Determine
なお、前記位置補正処理における前記所定方向は、基準方向である。基準方向は、透過画像及び発光画像が生成される仮想的な2次元空間において、予め決められた1つの方向である。
The predetermined direction in the position correction process is a reference direction. The reference direction is one predetermined direction in a virtual two-dimensional space in which a transmission image and a light emission image are generated.
したがって、画像処理システム(11)は、位置補正部(113a)によって位置補正処理が行われるので、位置補正処理が行われなかった場合に比べて、領域設定部(113b)による検査領域(81a,81b)の抽出処理の精度が向上する。この結果、検査部(113c)による検査精度も向上する。
Therefore, in the image processing system (11), since the position correction processing is performed by the position correction unit (113a), the inspection area (81a, 81b) by the area setting unit (113b) is compared with the case where the position correction processing is not performed. The accuracy of the extraction process of 81 b) is improved. As a result, the inspection accuracy by the inspection unit (113c) is also improved.
また、実施形態に係る第5の態様の画像処理システム(11)では、第4の態様において、検査部(113c)は、検査領域(81a,81b)がそれぞれ設定された補正透過画像(G3a)及び補正発光画像に対して、機械学習によって構築された認識アルゴリズムを実行することで、太陽電池セル(9)にクラック(8)が生じているか否かを判定することが好ましい。
In the image processing system (11) according to the fifth aspect of the embodiment, in the fourth aspect, the inspection unit (113c) corrects the transmission image (G3a) in which the inspection areas (81a, 81b) are set. It is preferable to determine whether or not a crack (8) has occurred in the solar battery cell (9) by executing a recognition algorithm constructed by machine learning on the corrected light emission image.
したがって、画像処理システム(11)は、機械学習によって構築された認識アルゴリズムを実行することで、クラック検査処理の精度がより向上する。
Therefore, the image processing system (11) further improves the accuracy of the crack inspection process by executing the recognition algorithm constructed by machine learning.
また、実施形態に係る第6の態様の画像処理システム(11)では、第5の態様において、機械学習は、ディープラーニングであることが好ましい。そして、検査部(113c)は、ディープラーニングによって構築された認識アルゴリズムを実行するニューラルネットワーク(NN1)を有する。
In the image processing system (11) according to the sixth aspect of the present invention, in the fifth aspect, the machine learning is preferably deep learning. And an inspection part (113c) has a neural network (NN1) which performs a recognition algorithm constructed by deep learning.
したがって、画像処理システム(11)は、ディープラーニングによって構築された認識アルゴリズムを実行することで、クラック検査処理の精度がより向上する。
Therefore, the image processing system (11) further improves the accuracy of the crack inspection process by executing the recognition algorithm constructed by deep learning.
また、実施形態に係る第7の態様の画像処理システム(11)では、第6の態様において、ニューラルネットワーク(NN1)は、2つの畳み込み層(101,102)を有することが好ましい。2つの畳み込み層(101,102)は、検査領域(81a,81b)がそれぞれ設定された補正透過画像(G3a)及び補正発光画像の各情報を入力される。
In the image processing system (11) of the seventh aspect according to the embodiment, in the sixth aspect, it is preferable that the neural network (NN1) has two convolutional layers (101, 102). Two convolutional layers (101, 102) are input with the respective information of the corrected transmission image (G3a) and the correction emission image in which the inspection regions (81a, 81b) are respectively set.
したがって、画像処理システム(11)は、同一のニューラルネットワーク(NN1)に補正透過画像(G3a)及び補正発光画像の各情報が入力される。この結果、画像処理システム(11)は、補正透過画像(G3a)及び補正発光画像がそれぞれ入力される2つのニューラルネットワークを用いる場合に比べて、簡易な構成になる。
Therefore, in the image processing system (11), the information of the corrected transmission image (G3a) and the corrected light emission image is input to the same neural network (NN1). As a result, the image processing system (11) has a simple configuration as compared with the case of using two neural networks to which the corrected transmission image (G3a) and the corrected light emission image are respectively input.
また、実施形態に係る第8の態様の画像処理システム(11)では、第4乃至第7の態様のいずれか一つにおいて、領域設定部(113b)は、鮮鋭化処理を行うことで、補正透過画像(G3a)及び補正発光画像から検査領域(81a,81b)をそれぞれ抽出することが好ましい。前記鮮鋭化処理は、補正透過画像(G3a)及び補正発光画像のそれぞれにおいて太陽電池セル(9)のへき開の方向に沿って延びるエッジを強調する。
In the image processing system (11) of the eighth aspect according to the embodiment, in any one of the fourth to seventh aspects, the region setting unit (113b) performs correction by performing a sharpening process. It is preferable to extract an inspection area (81a, 81b) from the transmission image (G3a) and the corrected light emission image. The sharpening process emphasizes an edge extending along the cleavage direction of the solar battery cell (9) in each of the corrected transmission image (G3a) and the corrected light emission image.
なお、へき開の方向は、太陽電池セル(9)のへき開面の面方向である。又は、へき開の方向は、太陽電池セル(9)のクラックが延びる方向である。又は、へき開の方向は、太陽電池セル(9)の一表面(本実施形態では受光面)における太陽電池セル9の1又は複数のへき開面の1又は複数の端縁(本実施形態では2つの端縁)が延びる方向である。例えば、へき開の方向は、一方向に対して45度、225度、135度及び315度の少なくとも1つの方向を含む。
The direction of cleavage is the surface direction of the cleavage plane of the solar battery cell (9). Alternatively, the direction of cleavage is the direction in which the cracks of the solar cell (9) extend. Alternatively, the direction of cleavage is one or more edges (two in the present embodiment) of one or more cleavage planes of the solar battery 9 on one surface (the light receiving surface in the present embodiment) of the solar battery cell (9). (Edge) is the direction in which it extends. For example, the direction of cleavage includes at least one direction of 45 degrees, 225 degrees, 135 degrees, and 315 degrees with respect to one direction.
したがって、画像処理システム(11)は、鮮鋭化処理によって、太陽電池セル(9)のへき開の方向に沿って延びるエッジを精度よく検出でき、検査領域(81a,81b)の各抽出精度も向上する。
Therefore, the image processing system (11) can accurately detect the edge extending along the cleavage direction of the solar battery cell (9) by the sharpening process, and the extraction accuracy of the inspection area (81a, 81b) is also improved. .
また、実施形態に係る第9の態様の画像処理システム(11)では、第8の態様において、太陽電池セル(9)のへき開の方向は、互いに直交する第1方向(0度方向または180度方向)及び第2方向(90度方向または270度方向)であることが好ましい。
In the image processing system (11) of the ninth aspect according to the embodiment, in the eighth aspect, the cleavage directions of the solar battery cell (9) are first directions (0 degree direction or 180 degrees) orthogonal to each other It is preferable that the direction is the second direction (90 degrees direction or 270 degrees direction).
したがって、画像処理システム(11)は、単結晶シリコンなどの単結晶材料を用いた太陽電池セル(9)のクラック(8)を精度よく検査できる。
Therefore, the image processing system (11) can inspect the crack (8) of the solar battery cell (9) using a single crystal material such as single crystal silicon with high accuracy.
また、実施形態に係る第10の態様の画像処理システム(11)では、第8または第9の態様において、領域設定部(113b)は、ウェーブレットフィルタを用いて前記鮮鋭化処理を行うことが好ましい。
In the image processing system (11) according to the tenth aspect, the area setting unit (113b) preferably performs the sharpening process using a wavelet filter in the eighth or ninth aspect. .
したがって、画像処理システム(11)は、候補領域(80)を精度よく検出できる。
Therefore, the image processing system (11) can detect the candidate area (80) with high accuracy.
また、実施形態に係る第11の態様の検査システム(A1,A2,A3)は、撮像ユニット(4)と、第1照明装置(2)と、発光発生装置(3)と、第1乃至第10の態様のいずれか一つの画像処理システム(11)と、を備える。撮像ユニット(4)は、太陽電池セル(9)を撮像する。第1照明装置(2)は、太陽電池セル(9)に照明光(Lt1)を照射して、照明光(Lt1)が太陽電池セル(9)を透過した透過光(Lt11)を生成する。発光発生装置(3)(第2照明装置3Aまたは電源装置3B)は、太陽電池セル(9)の発光(Lt21またはLt31)を生じさせる。そして、撮像ユニット(4)は、透過光(Lt11)を受光して透過画像の情報を画像処理システム(11)へ出力し、発光を受光して発光画像の情報を画像処理システム(11)へ出力する。
An inspection system (A1, A2, A3) according to an eleventh aspect of the present invention includes an imaging unit (4), a first illumination device (2), a light emission generation device (3), and And an image processing system (11) according to any one of the ten aspects. An imaging unit (4) images a solar cell (9). The first lighting device (2) applies illumination light (Lt1) to the solar battery cell (9) to generate transmission light (Lt11) in which the illumination light (Lt1) is transmitted through the solar battery cell (9). The light emission generation device (3) (the second lighting device 3A or the power supply device 3B) generates the light emission (Lt21 or Lt31) of the solar battery cell (9). Then, the imaging unit (4) receives the transmitted light (Lt11), outputs the information of the transmitted image to the image processing system (11), receives the light emission, and receives the information of the light emission image to the image processing system (11). Output.
したがって、検査システム(A1,A2,A3)は、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、検査システム(A1,A2,A3)は、クラック(8)と、エッチングむら、エッチング模様、表面膜の擦過痕、汚れなどの他の要素(ノイズ)とを精度よく区別することができる。
Accordingly, the inspection system (A1, A2, A3) can accurately determine the crack (8) of the solar cell (9) based on the captured image of the solar cell (9). The inspection system (A1, A2, A3) can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks on the surface film, dirt, and the like.
また、実施形態に係る第12の態様の検査システム(A1,A2)では、第11の態様において、発光発生装置(3)は、太陽電池セル(9)に励起光(Lt2)を照射して、フォトルミネッセンスによって太陽電池セルの発光(Lt21)を生じさせる第2照明装置(3A)であることが好ましい。発光画像はPL発光画像である。
In the inspection system (A1, A2) of the twelfth aspect according to the embodiment, in the eleventh aspect, the light emission generation device (3) irradiates the solar battery cell (9) with excitation light (Lt2). It is preferable that it is a 2nd illuminating device (3A) which produces light emission (Lt21) of a photovoltaic cell by photoluminescence. The luminescence image is a PL luminescence image.
したがって、検査システム(A1,A2)は、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、検査システム(A1,A2)は、クラック(8)と他の要素とを精度よく区別することができる。
Accordingly, the inspection system (A1, A2) can accurately determine the crack (8) of the solar cell (9) based on the captured image of the solar cell (9). And an inspection system (A1, A2) can distinguish a crack (8) and other elements with sufficient accuracy.
また、実施形態に係る第13の態様の検査システム(A1)では、第12の態様において、撮像ユニット(4)は、第1撮像装置(41)と、フィルタ(42a)と、第2撮像装置(42)と、を有することが好ましい。第1撮像装置(41)は、透過光(Lt11)を受光して透過画像の情報を画像処理システム(11)へ出力する。フィルタ(42a)は、発光(Lt21)を通過させ、励起光(Lt2)を減衰させる。第2撮像装置(42)は、フィルタ(42a)を介して発光(Lt21)を受光してPL発光画像の情報を画像処理システム(11)へ出力する。
In the inspection system (A1) according to the thirteenth aspect, the imaging unit (4) includes the first imaging device (41), the filter (42a), and the second imaging device according to the twelfth aspect. It is preferable to have (42). The first imaging device (41) receives the transmitted light (Lt11) and outputs information of the transmitted image to the image processing system (11). The filter (42 a) passes the light emission (Lt 21) and attenuates the excitation light (Lt 2). The second imaging device (42) receives the light emission (Lt21) through the filter (42a) and outputs the information of the PL light emission image to the image processing system (11).
したがって、検査システム(A1)は、透過画像の撮像に適した第1撮像装置(41)、及びPL発光画像の撮像に適した第2撮像装置(42)を備えることができるので、高画質の撮像画像を生成できる。
Therefore, since the inspection system (A1) can be provided with the first imaging device (41) suitable for capturing a transmission image and the second imaging device (42) suitable for capturing a PL light emission image, the inspection system (A1) can achieve high image quality. A captured image can be generated.
また、実施形態に係る第14の態様の検査システム(A2)では、第12の態様において、撮像ユニット(4)は、1つの撮像装置(42)と、透過光(Lt11)及び発光(Lt21)をそれぞれ通過させ、励起光(Lt2)を減衰させるフィルタ(42a)と、を有することが好ましい。撮像装置(42)は、フィルタ(42a)を介して透過光(Lt11)を受光して透過画像の情報を画像処理システム(11)へ出力し、フィルタ(42a)を介して発光(Lt21)を受光してPL発光画像の情報を画像処理システム(11)へ出力する。
In the inspection system (A2) according to the fourteenth aspect of the present invention, in the twelfth aspect, the imaging unit (4) includes one imaging device (42), transmitted light (Lt11), and light emission (Lt21). And a filter (42a) for attenuating the excitation light (Lt2). The imaging device (42) receives the transmitted light (Lt11) through the filter (42a), outputs information of the transmitted image to the image processing system (11), and emits light (Lt21) through the filter (42a). The light is received and information of the PL emission image is output to the image processing system (11).
したがって、検査システム(A2)は、低コスト化、システム構成の簡略化を図ることができる。
Therefore, the inspection system (A2) can achieve cost reduction and simplification of the system configuration.
また、実施形態に係る第15の態様の検査システム(A3)では、第11の態様において、発光発生装置(3)は、太陽電池セル(9)に電力を供給して、エレクトロルミネッセンスによって太陽電池セル(9)の発光(Lt31)を生じさせる電源装置(3B)であることが好ましい。発光画像はEL発光画像である。
Moreover, in the inspection system (A3) according to the fifteenth aspect of the present invention, in the eleventh aspect, the light emission generating device (3) supplies power to the solar battery cell (9), and the solar battery is electroluminescent. It is preferable that it is a power supply device (3B) which produces light emission (Lt31) of a cell (9). The luminescence image is an EL luminescence image.
したがって、検査システム(A3)は、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、検査システム(A3)は、クラック(8)と他の要素とを精度よく区別することができる。
Therefore, the inspection system (A3) can accurately determine the crack (8) of the solar battery cell (9) based on the captured image of the solar battery cell (9). And an inspection system (A3) can distinguish a crack (8) and other elements with sufficient accuracy.
また、実施形態に係る第16の態様の画像処理方法は、太陽電池セル(9)の画像に基づいて太陽電池セル(9)のクラック(8)を検査するための画像処理方法である。画像処理方法は、取得ステップ(S1)と、画像処理ステップ(S2)と、を備える。取得ステップ(S1)は、太陽電池セル(9)を透過した透過光(Lt11)による太陽電池セル(9)の画像である透過画像(濃淡画像G1)の情報を取得する。また、取得ステップ(S1)は、太陽電池セル(9)の発光(Lt21またはLt31)による太陽電池セル(9)の画像である発光画像(濃淡画像G1)の情報を取得する。画像処理ステップ(S2)は、透過画像の情報及び発光画像の各情報を受け取って画像処理を行うことで、太陽電池セル(9)にクラック(8)が生じているか否かを判定する。
Moreover, the image processing method of the 16th aspect which concerns on embodiment is an image processing method for test | inspecting the crack (8) of a photovoltaic cell (9) based on the image of a photovoltaic cell (9). The image processing method includes an acquisition step (S1) and an image processing step (S2). An acquisition step (S1) acquires the information of the transmitted image (grayscale image G1) which is an image of the photovoltaic cell (9) by the transmitted light (Lt11) which permeate | transmitted the photovoltaic cell (9). Moreover, an acquisition step (S1) acquires the information of the light emission image (grayscale image G1) which is an image of the photovoltaic cell (9) by light emission (Lt21 or Lt31) of a photovoltaic cell (9). The image processing step (S2) receives the information of the transmission image and the respective information of the light emission image and performs image processing to determine whether or not a crack (8) is generated in the solar battery cell (9).
したがって、上述の画像処理方法は、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、画像処理方法は、クラック(8)と、エッチングむら、エッチング模様、表面膜の擦過痕、汚れなどの他の要素(ノイズ)とを精度よく区別することができる。
Therefore, the above-mentioned image processing method can discriminate crack (8) of a photovoltaic cell (9) accurately based on an image pick-up picture of a photovoltaic cell (9). Then, the image processing method can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks of the surface film, dirt and the like.
また、実施形態に係る第17の態様のプログラムは、コンピュータシステム(1)に、第16の態様の画像処理方法を実行させる。
The program according to the seventeenth aspect relates to the computer system (1) to execute the image processing method according to the sixteenth aspect.
したがって、上述のプログラムは、太陽電池セル(9)の撮像画像に基づいて、太陽電池セル(9)のクラック(8)を精度よく判別できる。そして、プログラムは、クラック(8)と、エッチングむら、エッチング模様、表面膜の擦過痕、汚れなどの他の要素(ノイズ)とを精度よく区別することができる。
Therefore, the above-mentioned program can judge crack (8) of a photovoltaic cell (9) accurately based on an image pick-up picture of a photovoltaic cell (9). Then, the program can accurately distinguish the crack (8) from other elements (noises) such as etching unevenness, etching patterns, abrasion marks of the surface film, dirt, and the like.
なお、上述の実施の形態は本開示の一例である。このため、本開示は、上述の実施形態に限定されることはなく、この実施の形態以外であっても、本開示に係る技術的思想を逸脱しない範囲であれば、設計等に応じて種々の変更が可能であることは勿論である。
The above-described embodiment is an example of the present disclosure. Therefore, the present disclosure is not limited to the above-described embodiment, and various other embodiments may be used according to the design and the like without departing from the technical concept of the present disclosure. Of course it is possible to change.
1 コンピュータシステム
11 画像処理システム
111 第1取得部
112 第2取得部
113 画像処理装置
113a 位置補正部
113b 領域設定部
113c 検査部
2 第1照明装置
3 発光発生装置
3A 第2照明装置
3B 電源装置
4 撮像ユニット
41 第1撮像装置
42 第2撮像装置(撮像装置)
42a フィルタ
71 セル領域
8 クラック
81a,81b 検査領域
9 太陽電池セル
A1,A2,A3 検査システム
Lt11 透過光
Lt2 励起光
Lt21,Lt31 発光
G1 濃淡画像(透過画像、発光画像、PL発光画像.EL発光画像)
G3a 補正透過画像
G3b 補正PL発光画像
NN1 ニューラルネットワーク
S1 取得ステップ
S2 画像処理ステップ DESCRIPTION OFSYMBOLS 1 Computer system 11 Image processing system 111 1st acquisition part 112 2nd acquisition part 113 Image processing apparatus 113a Position correction part 113b Area setting part 113c Inspection part 2 1st illuminating device 3 luminescence generator 3A 2nd illuminating device 3B power supply 4 Imaging unit 41 first imaging device 42 second imaging device (imaging device)
42a filter 71 cell area 8 crack 81a, 81b inspection area 9 photovoltaic cell A1, A2, A3 inspection system Lt11 transmitted light Lt2 excitation light Lt21, Lt31 emission G1 gray-scale image (transmission image, emission image, PL emission image. EL emission image )
G3a corrected transmission image G3b corrected PL emission image NN1 neural network S1 acquisition step S2 image processing step
11 画像処理システム
111 第1取得部
112 第2取得部
113 画像処理装置
113a 位置補正部
113b 領域設定部
113c 検査部
2 第1照明装置
3 発光発生装置
3A 第2照明装置
3B 電源装置
4 撮像ユニット
41 第1撮像装置
42 第2撮像装置(撮像装置)
42a フィルタ
71 セル領域
8 クラック
81a,81b 検査領域
9 太陽電池セル
A1,A2,A3 検査システム
Lt11 透過光
Lt2 励起光
Lt21,Lt31 発光
G1 濃淡画像(透過画像、発光画像、PL発光画像.EL発光画像)
G3a 補正透過画像
G3b 補正PL発光画像
NN1 ニューラルネットワーク
S1 取得ステップ
S2 画像処理ステップ DESCRIPTION OF
G3a corrected transmission image G3b corrected PL emission image NN1 neural network S1 acquisition step S2 image processing step
Claims (17)
- 太陽電池セルの画像に基づいて前記太陽電池セルのクラックを検査するための画像処理システムであって、
前記太陽電池セルを透過した透過光による前記太陽電池セルの画像である透過画像の情報を取得する第1取得部と、
前記太陽電池セルの発光による前記太陽電池セルの画像である発光画像の情報を取得する第2取得部と、
前記透過画像の情報及び前記発光画像の各情報を受け取って画像処理を行うことで、前記太陽電池セルに前記クラックが生じているか否かを判定する画像処理装置と、を備える
ことを特徴とする画像処理システム。 An image processing system for inspecting a crack of the solar battery cell based on an image of the solar battery cell,
A first acquisition unit configured to acquire information of a transmission image which is an image of the solar battery cell by transmitted light transmitted through the solar battery cell;
A second acquisition unit that acquires information of a light emission image that is an image of the solar battery cell by light emission of the solar battery cell;
An image processing apparatus that receives the information of the transmission image and each information of the light emission image and performs image processing to determine whether the crack is generated in the solar battery cell; Image processing system. - 前記発光画像は、励起光の照射によって発光している前記太陽電池セルが撮像されたPL発光画像である
ことを特徴とする請求項1記載の画像処理システム。 The image processing system according to claim 1, wherein the light emission image is a PL light emission image obtained by capturing the solar battery cell emitting light by irradiation of excitation light. - 前記発光画像は、電流を供給されて発光している前記太陽電池セルが撮像されたEL発光画像である
ことを特徴とする請求項1記載の画像処理システム。 The image processing system according to claim 1, wherein the light emission image is an EL light emission image obtained by capturing an image of the solar battery cell which is emitting a current by being supplied with an electric current. - 前記透過画像及び前記発光画像はそれぞれ濃淡画像であり、
前記画像処理装置は、
前記透過画像において前記太陽電池セルが写っているセル領域、及び前記発光画像において前記太陽電池セルが写っているセル領域のそれぞれが所定方向に向くように、前記透過画像及び前記発光画像を補正する位置補正処理を行い、前記位置補正処理が施された前記透過画像である補正透過画像、及び前記位置補正処理が施された前記発光画像である補正発光画像を生成する位置補正部と、
前記補正透過画像及び前記補正発光画像において、前記クラックが写っていると推定される検査領域の情報をそれぞれ生成する領域設定部と、
前記検査領域がそれぞれ設定された前記補正透過画像及び前記補正発光画像に基づいて、前記太陽電池セルに前記クラックが生じているか否かを判定する検査部と、を備える
ことを特徴とする請求項1乃至3のいずれか一項に記載の画像処理システム。 Each of the transmission image and the light emission image is a gray-scale image,
The image processing apparatus is
The transmission image and the light emission image are corrected so that each of the cell region in which the solar battery cell is photographed in the transmission image and the cell region in which the solar battery cell is photographed in the light emission image are directed in a predetermined direction. A position correction unit that performs position correction processing to generate a corrected transmission image that is the transmission image subjected to the position correction processing, and a correction light emission image that is the light emission image that is subjected to the position correction processing;
An area setting unit configured to respectively generate information on an inspection area in which the crack is estimated to be captured in the corrected transmission image and the corrected light emission image;
An inspection unit that determines whether the crack is generated in the solar battery cell based on the corrected transmission image and the correction light emission image in which the inspection area is set, respectively. The image processing system according to any one of 1 to 3. - 前記検査部は、前記検査領域がそれぞれ設定された前記補正透過画像及び前記補正発光画像に対して、機械学習によって構築された認識アルゴリズムを実行することで、前記太陽電池セルに前記クラックが生じているか否かを判定することを特徴とする請求項4記載の画像処理システム。 The inspection unit generates the crack in the solar battery cell by executing a recognition algorithm constructed by machine learning on the corrected transmission image and the correction emission image in which the inspection region is set, respectively. 5. The image processing system according to claim 4, wherein the image processing system determines whether or not there is an error.
- 前記機械学習は、ディープラーニングであり、
前記検査部は、前記ディープラーニングによって構築された認識アルゴリズムを実行するニューラルネットワークを有する
ことを特徴とする請求項5記載の画像処理システム。 The machine learning is deep learning,
The image processing system according to claim 5, wherein the inspection unit includes a neural network that executes a recognition algorithm constructed by the deep learning. - 前記ニューラルネットワークは、前記検査領域がそれぞれ設定された前記補正透過画像及び前記補正発光画像の各情報を入力される2つの畳み込み層を有することを特徴とする請求項6記載の画像処理システム。 7. The image processing system according to claim 6, wherein the neural network has two convolutional layers to which each information of the corrected transmission image and the correction light emission image in which the inspection area is set respectively is input.
- 前記領域設定部は、前記補正透過画像及び前記補正発光画像のそれぞれにおいて前記太陽電池セルのへき開の方向に沿って延びるエッジを強調する鮮鋭化処理を行うことで、前記補正透過画像及び前記補正発光画像から前記検査領域をそれぞれ抽出することを特徴とする請求項4乃至7のいずれか一項に記載の画像処理システム。 The area setting unit performs a sharpening process that emphasizes an edge extending along the cleavage direction of the solar battery cell in each of the corrected transmission image and the correction light emission image, to thereby correct the correction transmission image and the correction light emission. The image processing system according to any one of claims 4 to 7, wherein each of the inspection areas is extracted from an image.
- 前記太陽電池セルのへき開の方向は、互いに直交する第1方向及び第2方向であることを特徴とする請求項8記載の画像処理システム。 The image processing system according to claim 8, wherein a cleavage direction of the solar battery cell is a first direction and a second direction orthogonal to each other.
- 前記領域設定部は、ウェーブレットフィルタを用いて前記鮮鋭化処理を行うことを特徴とする請求項8または9記載の画像処理システム。 10. The image processing system according to claim 8, wherein the area setting unit performs the sharpening process using a wavelet filter.
- 太陽電池セルを撮像する撮像ユニットと、
前記太陽電池セルに照明光を照射して、前記照明光が前記太陽電池セルを透過した透過光を生成する第1照明装置と、
前記太陽電池セルの発光を生じさせる発光発生装置と、
前記請求項1乃至10のいずれか一項に記載の画像処理システムと、を備え、
前記撮像ユニットは、前記透過光を受光して透過画像の情報を前記画像処理システムへ出力し、前記発光を受光して発光画像の情報を前記画像処理システムへ出力する
ことを特徴とする検査システム。 An imaging unit for imaging a solar battery cell;
A first illumination device that emits illumination light to the solar battery cell to generate transmitted light in which the illumination light is transmitted through the solar battery cell;
A light emission generator for causing light emission of the solar battery cell;
An image processing system according to any one of the preceding claims.
The inspection unit receives the transmitted light, outputs information of a transmitted image to the image processing system, receives the light emission, and outputs information of a light emission image to the image processing system. . - 前記発光発生装置は、前記太陽電池セルに励起光を照射して、フォトルミネッセンスによって前記太陽電池セルの発光を生じさせる第2照明装置であり、
前記発光画像はPL発光画像である
ことを特徴とする請求項11記載の検査システム。 The light emission generation device is a second illumination device that emits excitation light to the solar battery cell to cause light emission of the solar battery cell by photoluminescence,
The inspection system according to claim 11, wherein the luminescence image is a PL luminescence image. - 前記撮像ユニットは、
前記透過光を受光して前記透過画像の情報を前記画像処理システムへ出力する第1撮像装置と、
前記発光を通過させ、前記励起光を減衰させるフィルタと、
前記フィルタを介して前記発光を受光して前記PL発光画像の情報を前記画像処理システムへ出力する第2撮像装置と、を有する
ことを特徴とする請求項12記載の検査システム。 The imaging unit is
A first imaging device that receives the transmitted light and outputs information of the transmitted image to the image processing system;
A filter that passes the emitted light and attenuates the excitation light;
13. The inspection system according to claim 12, further comprising: a second imaging device that receives the light emission through the filter and outputs information of the PL light emission image to the image processing system. - 前記撮像ユニットは、
1つの撮像装置と、
前記透過光及び前記発光をそれぞれ通過させ、前記励起光を減衰させるフィルタと、を有し、
前記撮像装置は、前記フィルタを介して前記透過光を受光して前記透過画像の情報を前記画像処理システムへ出力し、前記フィルタを介して前記発光を受光して前記PL発光画像の情報を前記画像処理システムへ出力する
ことを特徴とする請求項12記載の検査システム。 The imaging unit is
One imaging device,
A filter for transmitting the transmitted light and the light emission and for attenuating the excitation light;
The imaging device receives the transmitted light through the filter, outputs information of the transmitted image to the image processing system, receives the light emission through the filter, and transmits the information of the PL emission image. The inspection system according to claim 12, wherein the inspection system outputs the image to an image processing system. - 前記発光発生装置は、前記太陽電池セルに電力を供給して、エレクトロルミネッセンスによって前記太陽電池セルの発光を生じさせる電源装置であり、
前記発光画像はEL発光画像である
ことを特徴とする請求項11記載の検査システム。 The light emission generation device is a power supply device that supplies power to the solar battery cell to cause light emission of the solar battery cell by electroluminescence,
The inspection system according to claim 11, wherein the luminescence image is an EL luminescence image. - 太陽電池セルの画像に基づいて前記太陽電池セルのクラックを検査するための画像処理方法であって、
前記太陽電池セルを透過した透過光による前記太陽電池セルの画像である透過画像の情報を取得し、前記太陽電池セルの発光による前記太陽電池セルの画像である発光画像の情報を取得する取得ステップと、
前記透過画像の情報及び前記発光画像の各情報を受け取って画像処理を行うことで、前記太陽電池セルに前記クラックが生じているか否かを判定する画像処理ステップと、を備える
ことを特徴とする画像処理方法。 An image processing method for inspecting a crack of the solar battery cell based on an image of the solar battery cell,
Acquisition step of acquiring information of a transmission image which is an image of the solar cell by the transmission light transmitted through the solar cell, and acquiring information of a light emission image which is an image of the solar cell by light emission of the solar cell When,
An image processing step of receiving information on the transmission image and each information on the light emission image and performing image processing to determine whether the crack is generated in the solar battery cell. Image processing method. - コンピュータシステムに、請求項16記載の画像処理方法を実行させることを特徴とするプログラム。 A program causing a computer system to execute the image processing method according to claim 16.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-238991 | 2017-12-13 | ||
| JP2017238991 | 2017-12-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019117228A1 true WO2019117228A1 (en) | 2019-06-20 |
Family
ID=66819005
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/045791 WO2019117228A1 (en) | 2017-12-13 | 2018-12-13 | Image processing system, inspection system, image processing method, and program |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2019117228A1 (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021057083A1 (en) * | 2019-09-26 | 2021-04-01 | 华为技术有限公司 | Fault detection method and fault detection apparatus for photovoltaic assembly |
| CN113960063A (en) * | 2021-09-03 | 2022-01-21 | 江苏光讯电力新能源有限公司 | Mirror surface check out test set is used in photovoltaic cell subassembly production |
| FR3115364A1 (en) * | 2020-10-21 | 2022-04-22 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | PHOTOLUMINESCENCE MEASUREMENT DEVICE |
| CN115274481A (en) * | 2022-07-28 | 2022-11-01 | 江苏博阳智能装备有限公司 | Battery string detection method |
| US20230251212A1 (en) * | 2022-02-07 | 2023-08-10 | GM Global Technology Operations LLC | Image processing and detection of discontinuities in battery cells |
| WO2024018681A1 (en) * | 2022-07-20 | 2024-01-25 | 株式会社ニューフレアテクノロジー | Inspection device and inspection image generation method |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005121599A (en) * | 2003-10-20 | 2005-05-12 | Komatsu Ltd | Defect inspection device of press formed article |
| JP2011516374A (en) * | 2008-03-31 | 2011-05-26 | ビーティー イメージング ピーティーワイ リミテッド | Wafer imaging and processing method and apparatus |
| US20130129187A1 (en) * | 2010-08-09 | 2013-05-23 | Bt Imaging Pty Ltd | Persistent feature detection |
| WO2014038012A1 (en) * | 2012-09-05 | 2014-03-13 | 株式会社島津製作所 | Solar cell inspecting apparatus |
| JP2014232079A (en) * | 2013-05-30 | 2014-12-11 | 株式会社島津製作所 | Solar battery cell inspection device, and image position correction method of solar battery cell inspection device |
| US20150070487A1 (en) * | 2012-05-09 | 2015-03-12 | Isra Vision Ag | Method and a device for the purpose of elctroluminescence inspection and/or photoluminescence inspection |
| JP2016205876A (en) * | 2015-04-17 | 2016-12-08 | ヴィスコ・テクノロジーズ株式会社 | Image recognition device |
| US20170343481A1 (en) * | 2016-05-27 | 2017-11-30 | Purdue Research Foundation | Methods and systems for crack detection |
-
2018
- 2018-12-13 WO PCT/JP2018/045791 patent/WO2019117228A1/en active Application Filing
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005121599A (en) * | 2003-10-20 | 2005-05-12 | Komatsu Ltd | Defect inspection device of press formed article |
| JP2011516374A (en) * | 2008-03-31 | 2011-05-26 | ビーティー イメージング ピーティーワイ リミテッド | Wafer imaging and processing method and apparatus |
| US20130129187A1 (en) * | 2010-08-09 | 2013-05-23 | Bt Imaging Pty Ltd | Persistent feature detection |
| US20150070487A1 (en) * | 2012-05-09 | 2015-03-12 | Isra Vision Ag | Method and a device for the purpose of elctroluminescence inspection and/or photoluminescence inspection |
| WO2014038012A1 (en) * | 2012-09-05 | 2014-03-13 | 株式会社島津製作所 | Solar cell inspecting apparatus |
| JP2014232079A (en) * | 2013-05-30 | 2014-12-11 | 株式会社島津製作所 | Solar battery cell inspection device, and image position correction method of solar battery cell inspection device |
| JP2016205876A (en) * | 2015-04-17 | 2016-12-08 | ヴィスコ・テクノロジーズ株式会社 | Image recognition device |
| US20170343481A1 (en) * | 2016-05-27 | 2017-11-30 | Purdue Research Foundation | Methods and systems for crack detection |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021057083A1 (en) * | 2019-09-26 | 2021-04-01 | 华为技术有限公司 | Fault detection method and fault detection apparatus for photovoltaic assembly |
| US12009783B2 (en) | 2019-09-26 | 2024-06-11 | Huawei Digital Power Technologies Co., Ltd. | Fault detection method, fault detection apparatus for photovoltaic module and computer-readable storage medium |
| FR3115364A1 (en) * | 2020-10-21 | 2022-04-22 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | PHOTOLUMINESCENCE MEASUREMENT DEVICE |
| WO2022084627A1 (en) * | 2020-10-21 | 2022-04-28 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Device for measuring via photoluminescence and transmission |
| CN113960063A (en) * | 2021-09-03 | 2022-01-21 | 江苏光讯电力新能源有限公司 | Mirror surface check out test set is used in photovoltaic cell subassembly production |
| CN113960063B (en) * | 2021-09-03 | 2024-02-20 | 江苏光讯电力新能源有限公司 | Mirror surface detection equipment is used in production of photovoltaic cell subassembly |
| US20230251212A1 (en) * | 2022-02-07 | 2023-08-10 | GM Global Technology Operations LLC | Image processing and detection of discontinuities in battery cells |
| WO2024018681A1 (en) * | 2022-07-20 | 2024-01-25 | 株式会社ニューフレアテクノロジー | Inspection device and inspection image generation method |
| CN115274481A (en) * | 2022-07-28 | 2022-11-01 | 江苏博阳智能装备有限公司 | Battery string detection method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019117228A1 (en) | Image processing system, inspection system, image processing method, and program | |
| US20200134857A1 (en) | Determining positions and orientations of objects | |
| JP5641463B2 (en) | Defect inspection apparatus and method | |
| JP5138119B2 (en) | Object detection device and information acquisition device | |
| US20150310600A1 (en) | System, method and computer program product for classification within inspection images | |
| KR20180103701A (en) | Die bonding device and method of manufacturing semiconductor device | |
| KR101043236B1 (en) | Apparatus and method for inspecting appearance of led chip | |
| WO2010064720A1 (en) | Apparatus and method for inspecting solar cell, and recording medium having program of the method recorded thereon | |
| JP2010107254A (en) | Device and method for inspecting led chip | |
| CN106409716B (en) | Detection system and detection method of electronic element | |
| CN111474179A (en) | Lens surface cleanliness detection device and method | |
| JP2012026908A (en) | Defect inspection method and defect inspection device | |
| JP2019086320A (en) | Electronic component conveyance device and electronic component inspection device | |
| US20190147577A1 (en) | Device for detecting defect and method of driving the same | |
| JP4153755B2 (en) | Solar panel color unevenness inspection device | |
| CN109982063B (en) | AA method and device of TOF depth camera | |
| JP2018195735A (en) | Semiconductor manufacturing apparatus and manufacturing method of semiconductor device | |
| CN109612408B (en) | Method and device for testing emission angle of semiconductor laser and readable storage medium | |
| JP2015137921A (en) | Appearance inspection device, appearance inspection method, and program | |
| CN104157589B (en) | Wafer defect scan method | |
| KR101420309B1 (en) | apparatus for inspecting printed circuit board | |
| CN111725086B (en) | Semiconductor manufacturing apparatus and method for manufacturing semiconductor device | |
| CN114354649A (en) | Detection device and method for metal particle defects of CMP (chemical mechanical polishing) pad | |
| JP4613090B2 (en) | Inspection device | |
| WO2019064367A1 (en) | Method for manufacturing display device and apparatus for manufacturing display device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18887521 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18887521 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |