WO2019036927A1 - 基于步频的足部计步数方法、装置及设备 - Google Patents
基于步频的足部计步数方法、装置及设备 Download PDFInfo
- Publication number
- WO2019036927A1 WO2019036927A1 PCT/CN2017/098591 CN2017098591W WO2019036927A1 WO 2019036927 A1 WO2019036927 A1 WO 2019036927A1 CN 2017098591 W CN2017098591 W CN 2017098591W WO 2019036927 A1 WO2019036927 A1 WO 2019036927A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- value
- feature
- time interval
- signal
- feature groups
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 38
- 238000012545 processing Methods 0.000 claims abstract description 91
- 230000001133 acceleration Effects 0.000 claims abstract description 71
- 238000012216 screening Methods 0.000 claims abstract description 7
- 238000004590 computer program Methods 0.000 claims description 14
- 239000000284 extract Substances 0.000 claims description 11
- 238000004364 calculation method Methods 0.000 claims description 9
- 238000005070 sampling Methods 0.000 claims description 9
- 230000000630 rising effect Effects 0.000 claims description 8
- 238000010606 normalization Methods 0.000 claims description 5
- 230000001131 transforming effect Effects 0.000 claims description 4
- 238000001914 filtration Methods 0.000 claims 2
- 238000010586 diagram Methods 0.000 description 28
- 210000002683 foot Anatomy 0.000 description 20
- 230000010355 oscillation Effects 0.000 description 5
- 230000009471 action Effects 0.000 description 3
- 210000003423 ankle Anatomy 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000037081 physical activity Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1123—Discriminating type of movement, e.g. walking or running
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/213—Feature extraction, e.g. by transforming the feature space; Summarisation; Mappings, e.g. subspace methods
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C22/00—Measuring distance traversed on the ground by vehicles, persons, animals or other moving solid bodies, e.g. using odometers, using pedometers
- G01C22/006—Pedometers
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/163—Wearable computers, e.g. on a belt
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2218/00—Aspects of pattern recognition specially adapted for signal processing
- G06F2218/08—Feature extraction
- G06F2218/10—Feature extraction by analysing the shape of a waveform, e.g. extracting parameters relating to peaks
Definitions
- the present application relates to the field of communications, and in particular, to a method, device and device for step counting based on a step frequency.
- fitness record is the basic exercise and fitness function in wearable sports equipment. It mainly realizes: step counting, distance recording, motion time recording, energy consumption calculation, etc. Most users have this function.
- One of the most intuitive sports indicators in fitness records is that it not only allows users to directly assess their own physical activity, but also integrates with relevant social apps and becomes an important part of sports socialization.
- the existing wearable exercise device is based on the step of the wrist and the waist wearing part. If the wearing part of the user is the foot, the step can not be realized, so the existing technical solution cannot realize the step counting for the foot.
- the technical problem to be solved by the embodiments of the present application is to provide a step counting method based on the step frequency, which can solve the problem that the foot counting cannot be realized in the prior art.
- a step frequency based foot counting method comprising the steps of: acquiring an original signal of a set time interval, performing an acceleration processing on the original signal to obtain a combined acceleration signal;
- the acceleration signal is subjected to state processing to obtain a motion time interval, and the acceleration signal is extracted according to a preset motion law to extract a plurality of feature groups; and the plurality of feature groups are filtered to obtain a first feature group, and the first feature group is obtained Extracting a median value, obtaining a step frequency of the set time interval according to the median value and the collected frequency; calculating the number of steps according to the motion time interval and the step frequency.
- the above technical solution can obtain a plurality of feature groups by processing the foot acceleration information, extract a median value of the first feature group from the plurality of feature groups, obtain a step frequency, and obtain a step number by using a step frequency calculation, thereby implementing the step based The frequency is implemented.
- the step number the set time interval length * the exercise time ratio / the step frequency
- the performing the state processing on the combined acceleration signal to obtain a motion time interval includes:
- the acceleration signal is divided into sub-windows of a set interval, and the maximum value, the minimum value, the average value, and the number of extreme points of the signals in each sub-window are extracted, according to the maximum value, the minimum value, the average value, and the pole
- the range of the number of value points determines the corresponding state of each sub-window, and the sum of the time intervals of the sub-windows corresponding to the walking state and the running state is the motion time interval.
- the summing acceleration signal extracts a plurality of feature groups according to a preset motion rule, including:
- Finding a maximum amplitude M max of the multiple differential processing and signal configuring a plurality of threshold lines for the multiple differential processing and signal, and a difference between adjacent two threshold lines is M max *C%, wherein C is a fixed value;
- the feature groups corresponding to all threshold lines are the plurality of feature groups.
- the difference value of the difference is obtained by the second difference group, and the ith value of the first difference group is extracted and the ith value of the second difference group is weighted to obtain a result of the plurality of weighting operations, and the plurality of weighting operations are performed.
- the result is a first j-weighted operation result that is greater than the weighted threshold from the front to the back, and the forward feature set of the j-th weighted operation result is determined as the first feature set;
- the i, j are integers greater than or equal to 1;
- a median value of the value of the X-axis of the first feature set, a step frequency a median median value/sampling frequency is extracted.
- a step frequency based foot counting device comprising:
- An acquisition unit configured to acquire an original signal of a set time interval; a processing unit, configured to perform an acceleration process on the original signal to obtain a combined acceleration signal; and perform state processing on the combined acceleration signal to obtain a motion time interval, where Combining the acceleration signal to extract a plurality of feature groups according to a preset motion rule; screening the plurality of feature groups to obtain a first feature group, extracting a median value from the first feature group, according to the median value and collecting The frequency is obtained as a step frequency of the set time interval; the number of steps is calculated according to the motion time interval and the step frequency.
- a portable device comprising: a sensor, a processor, a memory, and a transceiver, the processor being coupled to the sensor, the memory, and the transceiver, wherein the sensor, And a processor configured to perform acceleration processing on the original signal to obtain a combined acceleration signal; and performing state processing on the combined acceleration signal to obtain a motion time interval, where the combination is
- the acceleration signal extracts a plurality of feature groups according to a preset motion rule; screening the plurality of feature groups to obtain a first feature group, extracting a median value from the first feature group, according to the median value and the collected
- the frequency obtains a step frequency of the set time interval; and the step number is calculated according to the motion time interval and the step frequency.
- a computer readable storage medium characterized in that it stores a computer program for electronic data exchange, wherein the computer program causes the computer to perform the method provided by the first aspect.
- a computer program product comprising: a non-transitory computer readable storage medium storing a computer program, the computer program being operative to cause a computer to perform the first aspect method.
- Figure 1a is a waveform diagram of a hand walk signal.
- Figure 1b is a waveform diagram of an ankle walking signal.
- FIG. 2 is a schematic flowchart diagram of a step frequency based foot counting method according to an embodiment of the present application.
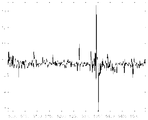
- FIG. 2a is an original signal for collecting an ankle of a set time interval according to an embodiment of the present application.
- FIG. 2b is a schematic diagram of a combined acceleration signal provided by an embodiment of the present application.
- Figure 2c is a schematic diagram of a typical signal that is stationary.
- Figure 2d is a schematic diagram of a typical model of oscillation.
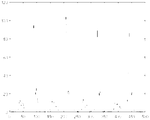
- 2f is a schematic diagram of secondary differential processing and signals for configuring a plurality of threshold lines.
- Figure 2g is a schematic diagram of the division of four regions.
- Figure 3a is a waveform diagram of a typical case.
- Fig. 3b is a schematic diagram of the waveform of the acceleration signal in the atypical case.
- Figure 3c is a schematic diagram of secondary differential processing and signal waveforms in atypical case one.
- Figure 3d is a schematic diagram of the quadratic differential processing and signal for atypical case two.
- FIG. 4a is a schematic diagram of a stepping step of the foot provided by the present application.
- FIG. 4b is another schematic diagram of the foot step provided by the present application.
- FIG. 4c is still another schematic diagram of the foot step provided by the present application.
- FIG. 4d is a schematic diagram of still another foot step provided by the present application.
- FIG. 5a is a schematic diagram of an original signal according to another embodiment of the present application.
- FIG. 5b is a schematic diagram of an original signal interception 5s window according to another embodiment of the present application.
- FIG. 5c is a schematic diagram of secondary differential processing and signals according to another embodiment of the present application.
- FIG. 6 is a schematic structural diagram of a step frequency based foot counting device according to the present application.
- FIG. 7 is a schematic structural diagram of a portable device provided by the present application.
- FIG. 1a is a waveform diagram of a hand walking signal in a set time range.
- FIG. 1b is a waveform diagram of a pedal walking signal in a set time range.
- the hand walk signal consists of 4 cycles. The acceleration of the three axes is small. The axis perpendicular to the ground can see a main peak (including some oscillation) in each cycle, and the amplitude is always changing.
- the foot walk signal contains two cycles, the acceleration of the three axes is large, and the axis perpendicular to the ground has two peaks in each cycle, and the amplitude does not change significantly during a period of time.
- FIG. 2 provides a step frequency based foot counting method, which is performed by a wearable device.
- the method is shown in Figure 2 and includes the following steps:
- Step S201 Acquire an original signal of a set time interval, perform acceleration processing on the original signal to obtain a combined acceleration signal.
- the original signal of the set time interval is collected.
- the set time interval is 5s as an example, and the acceleration signal is processed on the original signal to obtain a combined acceleration signal as shown in FIG. 2b.
- the original signal as shown in Figure 2a can be a three-axis acceleration signal.
- Step S202 processing the state of the combined acceleration signal to obtain a motion time interval.
- the state may be specifically divided into: static, oscillating, walking, running, and others.
- the typical signal of static is shown in Figure 2c.
- the typical signal of the oscillation is shown in Figure 2d.
- the set amplitude ie Y-axis value
- the signal other than static and oscillation is determined to be running or running.
- the signal outside the amplitude range is determined to be other, and the motion time interval, that is, the sum of the time of walking and running, is obtained after the stationary, oscillating, and other culling.
- the combined acceleration signal shown in FIG. 2b can be divided into sub-windows of a set interval (for example, 1 s), and the maximum value, the minimum value, the average value, and the extreme value points of the signals in each sub-window are extracted, according to The range of the maximum value, the minimum value, the average value, and the number of extreme points determines the state corresponding to the range, that is, the sum of the time intervals of the sub-window corresponding to the state of the walking state and the running state, that is, the stationary state, the oscillation, the walking, the running, and the other. It is the exercise time interval.
- the above average value may specifically be an average of all signals in the sub-window.
- Step S203 extracting the plurality of feature groups according to a preset motion law.
- the purpose of feature extraction is to find the key features of each step in the original signal waveform and quantize it as the main input for the step count calculation. Complete the process of visually observing the waveform shape to provide a digital description. Specifically, as shown in FIG. 2g, the acceleration of the ankle walking signal can be artificially divided into four regions, the fluctuation of the region 4 is the most intense, the other regions are relatively flat, and the region 1 is substantially free of fluctuations.
- the method for implementing step S203 may specifically be:
- the sum of the n values of the small window transforms the sum of the n values of each small window into a second differential processing sum signal.
- the value of the above n is an integer, and n may take a value in [3, 10], and the specific value may be determined according to the frequency of the original signal in the set time interval, and the principle of determining the value of n is determined. For example, if the sampling frequency of the original signal is higher, the value of n is higher. Conversely, the lower the sampling frequency of the original signal, the lower the value of n.
- differential processing is exemplified by the second differential processing.
- multiple differential processing such as three differential processing, four differential processing, and the like, may also be employed.
- the specific embodiment of the present application does not limit the specific number of times of the differential processing.
- C is The fixed value (set value), as shown in Fig. 2f, the value of C is 20, that is, the difference between two adjacent threshold lines is 20%*X max .
- the above C value may also be a value of 10 or 5 or the like.
- the value of (position) is the number of intersection points m and the value corresponding to the X-axis of each intersection point as the feature group corresponding to the threshold line, and the feature groups corresponding to all the threshold lines are a plurality of feature groups. As shown in Table 1, it is a list of values of some feature groups in multiple feature groups.
- Step S204 screening the plurality of feature groups to obtain a first feature set, extracting a median value for the first feature set, and obtaining a step frequency of the set time interval according to the median value and the collected frequency.
- the implementation method of the foregoing step S204 may specifically be:
- Extracting p feature groups of the plurality of feature groups whose number of intersection points is within a set range, and calculating a normalized standard deviation value of the X-axis value of each of the p feature groups, the normalized standard deviation value
- the standard deviation of the adjacent differences of the X-axis / the average value of the adjacent differences of the X-axis, and the adjacent average of the X-axis may be the average of the differences of the adjacent two X-axis.
- the standard deviation of the adjacent differences of the X-axis the standard deviation of the array [x2-x1, x3-x2, x4-x3].
- Calculating a difference between the number of intersections of two adjacent feature groups in the p feature groups to obtain a first difference group, and calculating a normalized standard deviation value of values of X axes of adjacent two feature groups in the p feature groups The difference value is obtained by the second difference group, and the ith value of the first difference group is extracted and the ith value of the second difference group is weighted to obtain a result of the plurality of weighting operations, and the result of the plurality of weighting operations is obtained.
- the first j-weighting operation result larger than the weighting threshold is searched from front to back, and the forward feature group of the j-th weighting operation result is determined as the first feature group.
- the weighting operation may be specifically: ax+by, where x may be the ith value of the first difference group, y may be the ith value of the second difference group, and i is an integer greater than or equal to 1.
- a and b are preset weights, all of which are constants.
- the difference group of the normalized standard deviation (ie, the first difference group) is [-0.09, -0.39, 0.04, 0.02, 0.01, 0.50]
- the difference group of the number (ie, the second The difference group) is [1, 0, 2, 1, 1, 7].
- the judgment method adopted is that when the threshold is lowered, the number of intersection points is greatly increased, and the normalized standard deviation of the period (difference between every two intersections) is greatly increased.
- the method of determining the optimal threshold is to select the thresholds that meet the conditions by linearly summing both the changes. As shown in FIG. 3a, the list of values of the obtained p feature groups is as shown in Table 2.
- the first feature group has a sequence number of six feature groups.
- Atypical Case 1 As the threshold continues to decrease, each impact location is gradually found and includes a partial lift position. Generally, there is a certain difference in the amplitude of each step, and the leg lifting amplitude and the impact amplitude are not easy to distinguish.
- FIG. 3b a schematic diagram of the acceleration signal in the atypical case 1 is shown in FIG. 3c as a second differential processing and signal diagram in the atypical case 1. The corresponding data is shown in Table 3.
- Figure 3d shows a second-order differential processing and signal diagram for atypical case two. The corresponding data is shown in Table 4.
- Step S205 calculating the number of steps according to the exercise time and the step frequency.
- the implementation method of the foregoing step S205 may specifically include:
- Number of steps set time interval length * exercise time ratio / step frequency
- the exercise time ratio the length of the exercise time interval / / the length of the set time interval.
- the technical solution provided by the present application realizes the step-by-step processing of the number of steps of the foot.
- the technical solution provided by the present application has high precision: realizing step counting of the foot, adaptive threshold value, high accuracy; strong robustness: processing by finding secondary differential summation of data, applicable to various periodic data, only There is a certain difference in the strength of the signal in the cycle, and there is no special requirement for the signal form; low complexity: the specific position of each step is not sought, only the step frequency is obtained, the number of calculations is small, and it is easy to implement.
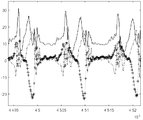
- the tester walks about 4.4 steps and steps 4.3478 steps during the x-axis time of 1.88-1.93 (units 10 ⁇ 4ms).
- the tester walked about 4.4 steps, step 4.386.
- the accuracy of the walking/running signal of this application is about 97%.
- the accuracy of the step-by-step calculation for the upstairs/downstairs is about 95%.
- the present application also provides another embodiment, taking a tester's foot signal as an example to illustrate how the present application counts.
- the tester walks 200 steps. After a period of inactivity, he runs 210 steps (one step for each step is recorded as 2 steps). Enter a 5s window signal as shown in Figure 5b.
- State judgment first, determine the state of the signal in the window. Specifically, by calculating the combined acceleration, the state is determined according to the nature of the combined acceleration, and the signal state of this segment is walking.
- segmentation calculates the proportion of time occupied by the motion. Specifically, the signal in the window is segmented in units of 1 s, and each segment state is determined according to the nature of the combined acceleration, and the ratio of walking and running to the total window time is obtained. This section of signal walking (sports) time accounted for 100%.
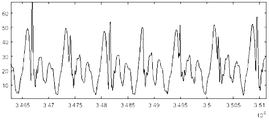
- the feature extraction performs a second difference on the combined acceleration, and takes 6 points as a small window to sum the differentiated signals to obtain a transformed secondary differential summation signal (Fig. 5c).
- the optimal threshold After finding the initial positions corresponding to the plurality of sets of thresholds, it is necessary to determine the optimal threshold. Based on the judgment described above, we can determine that this window signal belongs to the second atypical case. For all atypical cases, we directly select the threshold and initial position corresponding to the normalized standard deviation of the period. For this window signal, we select the initial position of the first group, namely [83, 201, 318, 435].
- Step number calculation first of all, to judge the rationality of the step frequency, according to the basic motion law, each step of walking is between 0.5-2s, the running time is between 0.3-1.5s, and the step frequency is relatively fixed (normalized standard) The difference is small), and it is judged whether the currently calculated step frequency is reasonable.
- the normalized standard deviation is 0.1443, and the step frequency is 117, which meets the reasonableness requirement.
- the step frequency calculated this time is subject to change.
- the number of steps in this window is 4.2735.
- the statistical step count method is 198.9571 steps.
- the actual tester walks and runs a total of 205 steps (1 step for wearing the foot movement), the accuracy rate is 97.05%.
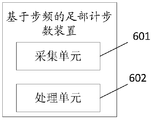
- FIG. 6 provides a step frequency based foot counting device, the device comprising:
- the collecting unit 601 is configured to collect an original signal of a set time interval
- the processing unit 602 is configured to perform acceleration processing on the original signal to obtain a combined acceleration signal, perform state processing on the combined acceleration signal to obtain a motion time interval, and extract the plurality of features according to a preset motion law. Grouping the plurality of feature groups to obtain a first feature set, extracting a median value for the first feature set, and obtaining a step frequency of the set time interval according to the median median value and the collected frequency; The number of steps is calculated according to the motion time interval and the step frequency.
- the processing unit 602 is specifically configured to divide the acceleration signal into sub-windows of the set interval, and extract a maximum value, a minimum value, an average value, and an extreme value point of the signals in each sub-window, according to the maximum value.
- the range of the minimum value, the average value, and the number of the extreme points determines the corresponding state of each sub-window, and the sum of the time intervals of the sub-windows corresponding to the walking state and the running state is the motion time interval.
- the processing unit 602 is configured to perform multiple differential processing on the combined acceleration signal to obtain a signal that is differentially processed multiple times, and set an adjacent one of the plurality of differentially processed signals to one a small window that finds the sum of n values of each small window, transforms the sum of the n values of each small window into a second differential processing sum signal; finds the maximum amplitude M max of the multiple differential processing and signal Configuring a plurality of threshold lines for the multiple differential processing and signals, the difference between the adjacent two threshold lines is M max * C%, where C is a fixed value; obtaining each threshold line and multiple differential processing The number of intersections of the rising edges of the sum signal and the value of the X axis corresponding to each intersection point, and the value corresponding to the X axis of the m and each intersection point is used as the feature group corresponding to the threshold line, and the feature group corresponding to all the threshold lines is For the plurality of feature groups.
- the processing unit 602 is specifically configured to extract p feature groups of the plurality of feature groups with m in a set range, and calculate a normalization of values of the X axes of each of the p feature groups. Calculating a standard difference value; calculating a difference value of the number of intersections of two adjacent feature groups in the p feature groups to obtain a first difference group, and calculating an X-axis value of two adjacent feature groups in the p feature groups The difference between the normalized standard deviation values is obtained by the second difference group, and the ith value of the first difference group is extracted and the ith value of the second difference group is weighted to obtain a result of multiple weighting operations.
- Finding the first j-weighted operation result larger than the weighting threshold from the result of the plurality of weighting operations from the front to the back, determining the forward feature group of the j-th weighting operation result as the first a feature set; the i, j are integers greater than or equal to 1; extracting a median value of the value of the X-axis of the first feature set, step frequency median / sampling frequency.
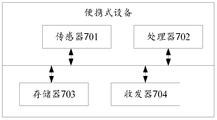
- FIG. 7 further provides a portable device, including: a sensor 701, a processor 702, a memory 703, and a transceiver 704.
- the processor 702 is connected to the sensor 701, the memory 703, and the transceiver 704, where
- a sensor 701 configured to collect an original signal of a set time interval
- the processor 702 is configured to perform acceleration processing on the original signal to obtain a combined acceleration signal, perform state processing on the combined acceleration signal to obtain a motion time interval, and extract the plurality of features according to a preset motion law. Grouping the plurality of feature groups to obtain a first feature set, extracting a median value for the first feature set, and obtaining a step frequency of the set time interval according to the median median value and the collected frequency; The number of steps is calculated according to the motion time interval and the step frequency.
- the processor 702 is specifically configured to divide the acceleration signal into sub-windows of the set interval, and extract a maximum value, a minimum value, an average value, and an extreme value point of the signals in each sub-window, according to the maximum value.
- the range of the minimum value, the average value, and the number of the extreme points determines the corresponding state of each sub-window, and the sum of the time intervals of the sub-windows corresponding to the walking state and the running state is the motion time interval.
- the processor 702 is configured to perform multiple differential processing on the combined acceleration signal to obtain a signal that is differentially processed multiple times, and set an adjacent one of the plurality of differentially processed signals to one a small window that finds the sum of n values of each small window, transforms the sum of the n values of each small window into a second differential processing sum signal; finds the maximum amplitude M max of the multiple differential processing and signal Configuring a plurality of threshold lines for the multiple differential processing and signals, the difference between the adjacent two threshold lines is M max * C%, where C is a fixed value; obtaining each threshold line and multiple differential processing The number of intersections of the rising edges of the sum signal and the value of the X axis corresponding to each intersection point, and the value corresponding to the X axis of the m and each intersection point is used as the feature group corresponding to the threshold line, and the feature group corresponding to all the threshold lines is For the plurality of feature groups.
- the processor 702 is configured to extract p feature groups in which the m is in the set range, and calculate a normalization of the values of the X-axis of each of the p feature groups. Calculating a standard difference value; calculating a difference value of the number of intersections of two adjacent feature groups in the p feature groups to obtain a first difference group, and calculating an X-axis value of two adjacent feature groups in the p feature groups The difference between the normalized standard deviation values is obtained by the second difference group, and the ith value of the first difference group is extracted and the ith value of the second difference group is weighted to obtain a result of multiple weighting operations.
- the present application also provides a computer readable storage medium storing a computer program for electronic data exchange, wherein the computer program causes the computer to perform the method and the refinement scheme as shown in FIG. 2.
- the application also relates to a computer program product comprising a non-transitory computer readable storage medium storing a computer program operative to cause a computer to perform the method and the refinement scheme as shown in FIG. .
- the disclosed apparatus may be implemented in other ways.
- the device embodiments described above are merely illustrative.
- the division of the unit is only a logical function division.
- there may be another division manner for example, multiple units or components may be combined or may be Integrate into another system, or some features can be ignored or not executed.
- the mutual coupling or direct coupling or communication connection shown or discussed may be an indirect coupling or communication connection through some interface, device or unit, and may be electrical or otherwise.
- the units described as separate components may or may not be physically separated, and the components displayed as units may or may not be physical units, that is, may be located in one place, or may be distributed to multiple network units. Some or all of the units may be selected according to actual needs to achieve the purpose of the solution of the embodiment.
- each functional unit in each embodiment of the present application may be integrated into one processing unit, or each unit may exist physically separately, or two or more units may be integrated into one unit.
- the above integrated unit can be implemented in the form of hardware or in the form of a software functional unit.
- the integrated unit if implemented in the form of a software functional unit and sold or used as a standalone product, may be stored in a computer readable memory.
- a computer readable memory A number of instructions are included to cause a computer device (which may be a personal computer, server or network device, etc.) to perform all or part of the steps of the methods described in various embodiments of the present application.
- the foregoing memory includes: a U disk, a Read-Only Memory (ROM), a Random Access Memory (RAM), a removable hard disk, a magnetic disk, or an optical disk, and the like, which can store program codes.
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Theoretical Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Human Computer Interaction (AREA)
- Public Health (AREA)
- Surgery (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Evolutionary Computation (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Physiology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Evolutionary Biology (AREA)
- Veterinary Medicine (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Artificial Intelligence (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Software Systems (AREA)
- Computer Hardware Design (AREA)
Abstract
本申请实施例公开了一种基于步频的足部计步数方法、装置及系统,所述方法包括如下步骤:采集设定时间区间的原始信号,对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值中值,依据所述中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。本申请具有实现足部计步的优点。
Description
本申请涉及通信领域,尤其涉及一种基于步频的足部计步数方法、装置及设备。
在全民健身国家战略指引下,跑步运动深受广大群众喜爱,可穿戴运动设备存在巨大的市场契机。健身记录是可穿戴运动设备中基础的运动健身功能,主要实现:计步、距离记录、运动时间记录、能耗计算等,大部分用户对此功能都有需求。其中计步是健身记录中最直观的一项运动指标,不仅使得用户可以直接对自身运动量进行评估,也与相关社交APP结合,成为运动社交的重要组成部分。
现有的可穿戴运动设备是基于手腕以及腰部佩戴部位的计步的实现,如用户的佩戴部位为脚部,则无法实现计步,所以现有的技术方案无法实现对足部实现计步。
发明内容
本申请实施例所要解决的技术问题在于,提供一种基于步频的足部计步数方法,可解决现有技术中无法实现足部计步的问题。
第一方面,提供基于步频的足部计步数方法,所述方法包括如下步骤:采集设定时间区间的原始信号,对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
上述技术方案能够通过对足部合加速信息进行处理后得到多个特征组,从多个特征组中提取第一特征组的中值得到步频,通过步频计算得到步数,从而实现基于步频实现计步。
在第一方面的一种可选方案中,步数=设定时间区间长度*运动时间占比/步频;
或步数=运动时间区间长度/步频。
在第一方面的另一种可选方案中,所述对所述合加速信号进行状态处理得到运动时间区间,包括:
合加速信号划分成设定间隔的子窗口,提取每个子窗口内信号的最大值、最小值、平均值以及极值点个数,,依据所述最大值、最小值、平均值以及所述极值点的个数的范围确定每个子窗口对应状态,将走状态和跑状态对应的子窗口的时间区间的和即为运动时间区间。
在第一方面的又一种可选方案中,所述将该合加速信号按预设的运动规律提取多个特征组,包括:
对所述合加速信号执行多次差分处理得到多次差分处理后的信号,对所述多次差分处理后的信号中相邻n个数值设置为一个小窗口,求每个小窗口的n个数值的和,将每个小窗口的n个数值的和变换成二次差分处理和信号;
查找所述多次差分处理和信号的最大幅值Mmax;为所述多次差分处理和信号配置多条阈值线,相邻两条阈值线之间的差值为Mmax*C%,其中C为定值;
获取每条阈值线与多次差分处理和信号的上升沿交点个数m以及每个交点对应X轴的值,将所述m以及每个交点对应X轴的值作为该条阈值线对应的特征组,所有阈值线对应的特征组即为所述多个特征组。
在第一方面的下一种可选方案中,所述对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值以及采集的频率得到所述设定时间区间的步频,包括:
提取所述多个特征组中m在设定范围的p个特征组,计算所述p个特征组中每个特征组的X轴的值的归一化标准差值;
计算所述p个特征组中相邻两个特征组的交点个数的差值得到第一差值组,计算p个特征组中相邻两个特征组的X轴的值的归一化标准差值的差值得到第二差值组,提取第一差值组的第i个值与第二差值组的第i个值进行加权运算得到多个加权运算的结果,从多个加权运算的结果从前到后寻找第一个大于加权阈值的第j加权运算结果,将第j加权运算结果的前向特征组确定为第一特征组;所述i,j均为大于等于1的整数;
提取所述第一特征组的X轴的值的中值,步频=中值中值/采样频率。
第二方面,提供一种基于步频的足部计步数装置,所述装置包括:
采集单元,用于采集设定时间区间的原始信号;处理单元,用于对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
第三方面,提供一种便携式设备,所述设备包括:传感器、处理器、存储器和收发器,所述处理器与所述传感器、所述存储器和所述收发器连接,其中,所述传感器,用于采集设定时间区间的原始信号;所述处理器,用于对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
第四方面,提供一种计算机可读存储介质,其特征在于,其存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行第一方面提供的方法。
第五方面,提供一种计算机程序产品,其特征在于,所述计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,所述计算机程序可操作来使计算机执行第一方面提供的方法。
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,
对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1a是一种手部走路信号的波形图。
图1b是一种脚踝走路信号的波形图。
图2是本申请实施例提供的一种基于步频的足部计步数方法的流程示意图。
图2a是本申请实施例提供的采集设定时间区间脚踝的原始信号。
图2b是本申请实施例提供的合加速信号示意图。
图2c是静止的典型信号示意图。
图2d是震荡的典型型号示意图。
图2e为n=6时的二次差分处理和信号示意图。
图2f为配置多条阈值线的二次差分处理和信号示意图。
图2g为4个区域的划分示意图。
图3a为典型情况的波形示意图。
图3b为非典型情况一的合加速信号波形示意图。
图3c为非典型情况一的二次差分处理和信号波形示意图。
图3d为非典型情况二的二次差分处理和信号示意图。
图4a为本申请提供的一种脚部计步示意图。
图4b为本申请提供的另一种脚部计步示意图。
图4c为本申请提供的又一种脚部计步示意图。
图4d为本申请提供的再一种脚部计步示意图。
图5a为本申请另一实施例的原始信号示意图。
图5b为本申请另一实施例的原始信号截取5s窗口示意图。
图5c为本申请另一实施例的二次差分处理和信号示意图。
图6为本申请提供的一种基于步频的足部计步数装置的结构示意图。
图7为本申请提供的一种便携式设备的结构示意图。
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
参阅图1a,图1a为设定时间范围手部走路信号的波形图,参阅图1b,图1b为设定时间范围脚踝走路信号的波形图。参阅图1a,手部走路信号包含了4个周期,三轴的加速幅度较小,与地面垂直的轴在每个周期可以看到一个主要的波峰(包含一定震荡),且幅度一直在变化。参阅图1b,足部走路信号包含了2个周期,三轴的加速幅度较大,与地面垂直的轴在每个周期有两个波峰,且在一段时间内幅度没有明显变化。这些差异导致手部计步方法不适用足部计步。
参阅图2,图2提供了一种基于步频的足部计步数方法,该方法由穿戴式设备执行,
该方法如图2所示,包括如下步骤:
步骤S201、采集设定时间区间的原始信号,对该原始信号执行合加速处理得到合加速信号。
如图2a所示为采集设定时间区间的原始信号,该设定时间区间以5s为例,对该原始信号执行合加速处理得到合加速信号如图2b所示。该如图2a所示的原始信号可以为三轴加速信号。
步骤S202、对该合加速信号的状态进行处理得到运动时间区间。
判断设定时间区间内信号的状态,具体来说,通过计算合加速,根据合加速的性质确定状态,该状态具体可以分为:静止、震荡、走、跑、其他。静止的典型信号如图2c所示,震荡的典型信号如图2d所示,对于设定幅值(即Y轴值)范围内除静止和震荡以外的信号确定为走或跑的状态,设定幅值范围外的信号确定为其他,将静止、震荡、其他剔除后即得到该运动时间区间,即走、跑的时间之和。
具体的,可以对如图2b所示的合加速信号划分成设定间隔(例如1s)的子窗口,提取每个子窗口内信号的最大值、最小值、平均值以及极值点个数,依据最大值、最小值、平均值以及极值点的个数的范围确定该范围对应的状态,即静止、震荡、走、跑、其他,将走状态和跑状态对应的子窗口的时间区间的和即为运动时间区间。上述平均值具体可以为子窗口内所有信号的平均值。
步骤S203、将该合加速信号按预设的运动规律提取多个特征组。
特征提取的目的是找到原信号波形中每一步的关键特征,对其进行量化,作为步数计算的主要输入。完成从视觉上对波形形态的观察到提供数字化描述的过程。具体来看,如图2g所示,可以将脚踝走路信号的合加速人为区分为4个区域,区域4的波动最为剧烈,其他区域相对平缓,区域1基本无波动。
实现步骤S203的方法具体可以为:
对该合加速信号执行多次(以二次为例)差分处理得到二次差分处理后的信号,对该二次差分处理后的信号中相邻n个数值可以为一个小窗口,求每个小窗口的n个数值的和,将每个小窗口的n个数值的和变换成二次差分处理和信号。
可选的,上述n的值为整数,且n可以取【3,10】中的值,具体的取值可以依据采集设定时间区间的原始信号的频率来确定,确定n的取值的原则可以为,如原始信号的采样频率越高,n的取值越高,反之,原始信号的采样频率越低,n的取值越低。
如图2e所示,其为n=6时的二次差分处理和信号示意图。
上述差分处理以二次差分处理为例,当然在实际应用中,还可以采用多次差分处理,例如三次差分处理,四次差分处理等等。本申请具体实施方式并不限制该差分处理的具体次数。
查找该二次差分处理和信号的最大幅值Mmax;为该二次差分处理和信号配置多条阈值线,相邻两条阈值线之间的差值为Mmax*C%,其中C为定值(设定值),如图2f为例,C的取值为20,即相邻两条阈值线之间的差值为20%*Xmax。当然在实际应用中,上述C值也可以为10或5等等取值。
获取每条阈值线与二次差分处理和信号的上升沿交点个数m以及每个交点对应X轴
(位置)的值,将该交点个数m以及每个交点对应X轴的值作为该条阈值线对应的特征组,所有阈值线对应的特征组即为多个特征组。如表1所示,为多个特征组中部分特征组的值列表。
表1:
| 序号 | 比例 | 个数(m) | 位置(X轴的值) |
| 1 | 0.7 | 4 | 240,312,380,446 |
| 2 | 0.6 | 4 | 239,331,378,445 |
| 3 | 0.5 | 4 | 239,310,378,445 |
| 4 | 0.4 | 6 | 106,166,238,309,378,000 |
步骤S204、对该多个特征组进行筛选得到第一特征组,对第一特征组提取中值,依据中值以及采集的频率得到设定时间区间的步频。
上述步骤S204的实现方法具体可以为:
提取该多个特征组中交点个数在设定范围的p个特征组,计算p个特征组中每个特征组的X轴的值的归一化标准差值,归一化标准差值=X轴的相邻差值的标准差/X轴的相邻差值平均值,该X轴的相邻平均值可以为相邻两个X轴的差值的平均值。这里以4个值为例,为了描述的方便,这里以x1、x2、x3、x4;
X轴的相邻平均值=【(x2-x1)+(x3-x2)+(x4-x3)】/3。
X轴的相邻差值标准差=对数组[x2-x1,x3-x2,x4-x3]求标准差。
计算p个特征组中相邻两个特征组的交点个数的差值得到第一差值组,计算p个特征组中相邻两个特征组的X轴的值的归一化标准差值的差值得到第二差值组,提取第一差值组的第i个值与第二差值组的第i个值进行加权运算得到多个加权运算的结果,从多个加权运算的结果从前到后寻找第一个大于加权阈值的第j加权运算结果,将第j加权运算结果的前向特征组确定为第一特征组。上述加权运算具体可以为:ax+by,其中x可以为第一差值组的第i个值,y可以为第二差值组的第i个值,i取大于等于1的整数。其中a,b为预设的权值,均为常数。
以表2为例,归一化标准差的差值组(即第一差值组)为[-0.09,-0.39,0.04,0.02,0.01,0.50],个数的差值组(即第二差值组)为[1,0,2,1,1,7]。对这两个差值组进行加权运算ax+by,即[a*(-0.09)+b*1,….,a*0.5+b*7],我们得到6个加权和,从前到后寻找,当找到大于加权阈值时,比如说我们找到第6个加权和符合条件,第6个加权和是由特征组7的相应特征减去特征组6的相应特征,那么第6个加权和的前向特征组(即被减数)是特征组6,那么我们认为特征组6是我们想要的特征组,特征组6对应的阈值为最优阈值。
提取第一特征组的X轴的差值的中值,步频=中值/采样频率。
上述中值具体为,如多个数值为奇数,例如1、3、7,该中值为中间一个值3,如该多个数值为偶数,该中值为中间2个值的平均值,例如,1、3、5、9,该中值=(3+5)/2=4。
对于第一特征组的确定,有典型情况和非典型情况,具体可以包括:
典型情况
在最优阈值的情况下,找到了所有的落地冲击位置;当阈值再次下降时,找到了所有落地冲击位置和抬腿位置。一般发生在各步较为相似,抬腿幅度比冲击幅度小的时候。
采取的判断方式是,阈值下降时,交点个数大幅上升,周期(每两个交点位置差)的归一化标准差大幅上升。
确定最优阈值的方法是,通过线性和的方式,同时考虑这两个变化,选取符合条件的阈值。如图3a所示,得到的p个特征组的值的列表如表2所示。
表2:
| 序号 | 归一化标准差 | 个数(m) |
| 1 | 0.51 | 3 |
| 2 | 0.42 | 4 |
| 3 | 0.03 | 4 |
| 4 | 0.07 | 6 |
| 5 | 0.09 | 7 |
| 6 | 0.1 | 7 |
| 7 | 0.61 | 14 |
如表2所示的数据,确定第一特征组为序号为6个特征组。
非典型情况一:随着阈值不断下降,逐渐找到各个冲击位置,并且包含了部分抬腿位置。一般发生在各步幅度有一定差异,抬腿幅度与冲击幅度不易区分的时候。参阅图3b为非典型情况一的合加速信号示意图,如图3c为非典型情况一的二次差分处理和信号示意图。其对应的数据如表3所示。
表3:
| 序号 | 归一化标准差 | 个数(m) | 位置(X) |
| 1 | 0.02 | 3 | 109,220,328 |
| 2 | 0.76 | 4 | 108,220,328,337 |
| 3 | 0.99 | 5 | 108,213,220,328,337 |
| 4 | 0.88 | 7 | … |
| 5 | 0.89 | 9 | … |
| 6 | 0.98 | 12 | … |
| 7 | 0.62 | 9 | … |
如表3所示的数据,确定第一特征组的序号为1。
非典型情况二
随着阈值不断下降,每次都找到所有的冲击位置。一般发生在各步较为相似,抬腿幅度远小于冲击幅度的时候。如图3d为非典型情况二的二次差分处理和信号示意图。其对应的数据如表4所示。
表4
| 序号 | 归一化标准差 | 个数(m) | 位置(X) |
| 1 | 0.02 | 4 | 83,201,318,435 |
| 2 | 0.03 | 4 | 82,200,317,433 |
如表4所示的数据,确定第一特征组的序号为2。
步骤S205、依据运动时间以及步频计算得到步数。
上述步骤S205的实现方法具体可以包括:
步数=设定时间区间长度*运动时间占比/步频;
或步数=运动时间区间长度/步频。
该运动时间占比=运动时间区间长度//设定时间区间长度。
本申请提供的技术方案实现了对脚部步数进行计步处理。本申请提供的技术方案具有高精度:实现足部计步,阈值自适应,准确度比较高;鲁棒性强:通过寻找数据二次差分求和来处理,适用于各种周期性数据,只需要周期内信号强弱有一定差异,对于信号形态没有特殊要求;低复杂度:不求各步的具体位置,只求步频,计算次数少,易于实现。
应用本申请技术方案,根据预先采集的三轴加速度传感器信号,计步结果如下图4a所示:
如图4a所示,在x轴时间为1.88-1.93(单位10^4ms)内,测试者行走约4.4步,计步4.3478步。在x轴时间为1.93-1.98内,测试者行走约4.4步,计步4.386步。
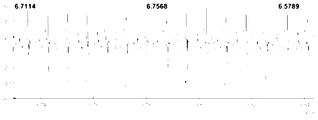
如图4b所示,在时间3.73-3.78内,测试者跑步约6.8步,计步6.7568步。在时间3.78-3.83内,测试者跑步约6.5步,计步6.5789步。
经初步验证,本申请对走路/跑步信号的计步准确率约为97%。准确率计算方式为准确率=1-abs(计步方法统计步数-真实步数)/真实步数,abs表示取绝对值。
如图4c所示,在时间0.95-1内,测试者下楼约5.5步,计步5.291步。在时间1-1.05内,测试者下楼约5步,计步5.0761步。
如图4d所示,在时间6-6.05内,测试者上楼约4.7步,计步4.6729步。在时间6.05-6.1内,测试者上楼约4.5步,计步4.5455步。
经初步验证,本申请对上楼/下楼的计步准确率约为95%。
本申请还提供另一实施例,以一段测试者的足部信号为例,说明本申请如何计步。如图5a所示,测试者走路200步,静止一段时间后,跑步210步(双脚各迈1步记为2步)。输入一段5s的窗口信号如图5b。
状态判断,首先,判断窗口内信号的状态,具体来说,通过计算合加速度,根据合加速度的性质确定状态,本段信号状态为走路。
然后,分段计算运动所占时间比例,具体来说,将窗口内信号以1s为单位分段,根据合加速度性质确定每段状态,并得到走路和跑步占总窗口时间的比例。本段信号走路(运动)时间占比100%。
特征提取对合加速度进行二次差分,以6个点为1个小窗口,对差分后的信号求和,得到变换后的二次差分求和信号(如图5c)。
找到每一个周期的初始位置。具体步骤如下:
找到当前窗口的二次差分求和信号的最大值,以最大值的0.1,0.2,…,0.9倍为阈值划线,找到信号上升沿与各阈值交点,为一组步子的初始位置;
根据基本运动规律,5s内交点个数应在3-50之间,只保留符合此条件的各组初始位置;
计算各组交点个数、周期(每两个交点位置差)的平均值和归一化标准差。
各组初始位置如下表5所示:
表5:
| 序号 | 个数(m) | 位置(X) |
| 1 | 4 | 83,201,318,435 |
| 2 | 4 | 82,200,317,433 |
步频计算,在找到多组阈值对应的初始位置之后,需要确定最优阈值。根据上文介绍的判断方式,我们可以确定此窗口信号属于第2种非典型情况。对所有非典型情况,我们直接选取周期的归一化标准差最小时对应的阈值和初始位置,对此窗口信号我们选择第1组初始位置,即[83,201,318,435]。
步数计算,首先,判断步频合理性,根据基本运动规律,走路每步时间在0.5-2s之间,跑步每步时间在0.3-1.5s之间,且步频相对固定(归一化标准差较小),判断当前计算出来的步频是否合理。对此窗口信号,归一化标准差值为0.1443,步频为117,符合合理性要求,以此次计算出来的步频为准。之后,根据步频计算步数,步数=窗口时间长度*运动时间占比/步频。此窗口步数为4.2735步。最终,此次运动计步方法统计步数为198.9571步,实际测试者走路与跑步共计205步(佩戴脚运动1步计为1步),准确率为97.05%。
参阅图6,图6提供一种基于步频的足部计步数装置,所述装置包括:
采集单元601,用于采集设定时间区间的原始信号;
处理单元602,用于对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
可选的,处理单元602,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=设定时间区间长度*运动时间占比/步频;
或处理单元602,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=运动时间区间长度/步频。
可选的,处理单元602,具体用于合加速信号划分成设定间隔的子窗口,提取每个子窗口内信号的最大值、最小值、平均值以及极值点个数,依据所述最大值、最小值、平均值以及所述极值点的个数的范围确定每个子窗口对应状态,将走状态和跑状态对应的子窗口的时间区间的和即为运动时间区间。
可选的,处理单元602,具体用于对所述合加速信号执行多次差分处理得到多次差分处理后的信号,对所述多次差分处理后的信号中相邻n个数值设置为一个小窗口,求每个小窗口的n个数值的和,将每个小窗口的n个数值的和变换成二次差分处理和信号;查找所述多次差分处理和信号的最大幅值Mmax;为所述多次差分处理和信号配置多条阈值线,相邻两条阈值线之间的差值为Mmax*C%,其中C为定值;获取每条阈值线与多次差分处理和信号的上升沿交点个数m以及每个交点对应X轴的值,将所述m以及每个交点对应X轴的值作为该条阈值线对应的特征组,所有阈值线对应的特征组即为所述多个特征组。
可选的,处理单元602,具体用于提取所述多个特征组中m在设定范围的p个特征组,计算所述p个特征组中每个特征组的X轴的值的归一化标准差值;计算所述p个特征组中相邻两个特征组的交点个数的差值得到第一差值组,计算p个特征组中相邻两个特征组的X轴的值的归一化标准差值的差值得到第二差值组,提取第一差值组的第i个值与第二差值组的第i个值进行加权运算得到多个加权运算的结果,从多个加权运算的结果从前到后寻找第一个大于加权阈值的第j加权运算结果,将第j加权运算结果的前向特征组确定为第
一特征组;所述i,j均为大于等于1的整数;提取所述第一特征组的X轴的值的中值,步频=中值/采样频率。
参阅图7,图7还提供一种便携式设备,所述设备包括:传感器701、处理器702、存储器703和收发器704,处理器702与传感器701、存储器703和收发器704连接,其中,
传感器701,用于采集设定时间区间的原始信号;
处理器702,用于对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
可选的,处理器702,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=设定时间区间长度*运动时间占比/步频;
或处理器702,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=运动时间区间长度/步频。
可选的,处理器702,具体用于合加速信号划分成设定间隔的子窗口,提取每个子窗口内信号的最大值、最小值、平均值以及极值点个数,依据所述最大值、最小值、平均值以及所述极值点的个数的范围确定每个子窗口对应状态,将走状态和跑状态对应的子窗口的时间区间的和即为运动时间区间。
可选的,处理器702,具体用于对所述合加速信号执行多次差分处理得到多次差分处理后的信号,对所述多次差分处理后的信号中相邻n个数值设置为一个小窗口,求每个小窗口的n个数值的和,将每个小窗口的n个数值的和变换成二次差分处理和信号;查找所述多次差分处理和信号的最大幅值Mmax;为所述多次差分处理和信号配置多条阈值线,相邻两条阈值线之间的差值为Mmax*C%,其中C为定值;获取每条阈值线与多次差分处理和信号的上升沿交点个数m以及每个交点对应X轴的值,将所述m以及每个交点对应X轴的值作为该条阈值线对应的特征组,所有阈值线对应的特征组即为所述多个特征组。
可选的,处理器702,具体用于提取所述多个特征组中m在设定范围的p个特征组,计算所述p个特征组中每个特征组的X轴的值的归一化标准差值;计算所述p个特征组中相邻两个特征组的交点个数的差值得到第一差值组,计算p个特征组中相邻两个特征组的X轴的值的归一化标准差值的差值得到第二差值组,提取第一差值组的第i个值与第二差值组的第i个值进行加权运算得到多个加权运算的结果,从多个加权运算的结果从前到后寻找第一个大于加权阈值的第j加权运算结果,将第j加权运算结果的前向特征组确定为第一特征组;所述i,j均为大于等于1的整数;提取所述第一特征组的X轴的值的中值,步频=中值/采样频率。
本申请还提供一种计算机可读存储介质,其存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行如图2所示的方法以及细化方案。
本申请还一种计算机程序产品,所述计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,所述计算机程序可操作来使计算机执行如图2所示的方法以及细化方案。
需要说明的是,对于前述的各方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本申请并不受所描述的动作顺序的限制,因为依据本申请,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定是本申请所必须的。
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
在本申请所提供的几个实施例中,应该理解到,所揭露的装置,可通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储器中。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储器中,包括若干指令用以使得一台计算机设备(可为个人计算机、服务器或者网络设备等)执行本申请各个实施例所述方法的全部或部分步骤。而前述的存储器包括:U盘、只读存储器(ROM,Read-Only Memory)、随机存取存储器(RAM,Random Access Memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。
以上所揭露的仅为本申请一种较佳实施例而已,当然不能以此来限定本申请之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本申请权利要求所作的等同变化,仍属于申请所涵盖的范围。
Claims (17)
- 一种基于步频的足部计步数方法,其特征在于,所述方法包括如下步骤:采集设定时间区间的原始信号,对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
- 根据权利要求1所述的方法,其特征在于,所述依据所述运动时间区间以及所述步频计算得到步数,包括:步数=设定时间区间长度*运动时间占比/步频;或步数=运动时间区间长度/步频。
- 根据权利要求1所述的方法,其特征在于,所述对所述合加速信号进行状态处理得到运动时间区间,包括:合加速信号划分成设定间隔的子窗口,提取每个子窗口内信号的最大值、最小值、平均值以及极值点个数,依据所述波峰平均值、所述最大值、最小值、平均值以及所述极值点的个数的范围确定每个子窗口对应状态,将走状态和跑状态对应的子窗口的时间区间的和即为运动时间区间。
- 根据权利要求1所述的方法,其特征在于,所述将该合加速信号按预设的运动规律提取多个特征组,包括:对所述合加速信号执行多次差分处理得到多次差分处理后的信号,对所述多次差分处理后的信号中相邻n个数值设置为一个小窗口,求每个小窗口的n个数值的和,将每个小窗口的n个数值的和变换成二次差分处理和信号;查找所述多次差分处理和信号的最大幅值Mmax;为所述多次差分处理和信号配置多条阈值线,相邻两条阈值线之间的差值为Mmax*C%,其中C为定值;获取每条阈值线与多次差分处理和信号的上升沿交点个数m以及每个交点对应X轴的值,将所述m以及每个交点对应X轴的值作为该条阈值线对应的特征组,所有阈值线对应的特征组即为所述多个特征组。
- 根据权利要求4所述的方法,其特征在于,所述对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值以及采集的频率得到所述设定时间区间的步频,包括:提取所述多个特征组中m在设定范围的p个特征组,计算所述p个特征组中每个特征组的X轴的值的归一化标准差值;计算所述p个特征组中相邻两个特征组的交点个数的差值得到第一差值组,计算p个特征组中相邻两个特征组的X轴的值的归一化标准差值的差值得到第二差值组,提取第一差值组的第i个值与第二差值组的第i个值进行加权运算得到多个加权运算的结果,从多个加权运算的结果从前到后寻找第一个大于加权阈值的第j加权运算结果,将第j加权运算结果的前向特征组确定为第一特征组;所述i,j均为大于等于1的整数;提取所述第一特征组的X轴的值的中值,步频=中值/采样频率。
- 一种基于步频的足部计步数装置,其特征在于,所述装置包括:采集单元,用于采集设定时间区间的原始信号;处理单元,用于对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
- 根据权利要求6所述的装置,其特征在于,所述处理单元,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=设定时间区间长度*运动时间占比/步频;或所述处理单元,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=运动时间区间长度/步频。
- 根据权利要求6所述的装置,其特征在于,所述处理单元,具体用于合加速信号划分成设定间隔的子窗口,提取每个子窗口内信号的最大值、最小值、平均值以及极值点个数,依据所述最大值、最小值、平均值以及所述极值点的个数的范围确定每个子窗口对应状态,将走状态和跑状态对应的子窗口的时间区间的和即为运动时间区间。
- 根据权利要求6所述的装置,其特征在于,所述处理单元,具体用于对所述合加速信号执行多次差分处理得到多次差分处理后的信号,对所述多次差分处理后的信号中相邻n个数值设置为一个小窗口,求每个小窗口的n个数值的和,将每个小窗口的n个数值的和变换成二次差分处理和信号;查找所述多次差分处理和信号的最大幅值Mmax;为所述多次差分处理和信号配置多条阈值线,相邻两条阈值线之间的差值为Mmax*C%,其中C为定值;获取每条阈值线与多次差分处理和信号的上升沿交点个数m以及每个交点对应X轴的值,将所述m以及每个交点对应X轴的值作为该条阈值线对应的特征组,所有阈值线对应的特征组即为所述多个特征组。
- 根据权利要求9所述的方法,其特征在于,所述处理单元,具体用于提取所述多个特征组中m在设定范围的p个特征组,计算所 述p个特征组中每个特征组的X轴的值的归一化标准差值;计算所述p个特征组中相邻两个特征组的交点个数的差值得到第一差值组,计算p个特征组中相邻两个特征组的X轴的值的归一化标准差值的差值得到第二差值组,提取第一差值组的第i个值与第二差值组的第i个值进行加权运算得到多个加权运算的结果,从多个加权运算的结果从前到后寻找第一个大于加权阈值的第j加权运算结果,将第j加权运算结果的前向特征组确定为第一特征组;所述i,j均为大于等于1的整数;提取所述第一特征组的X轴的值的中值,步频=中值/采样频率。
- 一种便携式设备,其特征在于,所述设备包括:传感器、处理器、存储器和收发器,所述处理器与所述传感器、所述存储器和所述收发器连接,其中,所述传感器,用于采集设定时间区间的原始信号;所述处理器,用于对所述原始信号执行合加速处理得到合加速信号;对所述合加速信号进行状态处理得到运动时间区间,将所述合加速信号按预设的运动规律提取多个特征组;对所述多个特征组进行筛选得到第一特征组,对所述第一特征组提取中值,依据所述中值中值以及采集的频率得到所述设定时间区间的步频;依据所述运动时间区间以及所述步频计算得到步数。
- 根据权利要求11所述的设备,其特征在于,所述处理器,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=设定时间区间长度*运动时间占比/步频;或所述处理器,具体用于依据所述运动时间区间以及所述步频计算得到步数,步数=运动时间区间长度/步频。
- 根据权利要求11所述的设备,其特征在于,所述处理器,具体用于合加速信号划分成设定间隔的子窗口,提取每个子窗口内信号的最大值、最小值、平均值以及极值点个数,依据所述最大值、最小值、平均值以及所述极值点的个数的范围确定每个子窗口对应状态,将走状态和跑状态对应的子窗口的时间区间的和即为运动时间区间。
- 根据权利要求11所述的设备,其特征在于,所述处理器,具体用于对所述合加速信号执行多次差分处理得到多次差分处理后的信号,对所述多次差分处理后的信号中相邻n个数值设置为一个小窗口,求每个小窗口的n个数值的和,将每个小窗口的n个数值的和变换成二次差分处理和信号;查找所述多次差分处理和信号的最大幅值Mmax;为所述多次差分处理和信号配置多条阈值线,相邻两条阈值线之间的差值为Mmax*C%,其中C为定值;获取每条阈值线与多次差分处理和信号的上升沿交点个数m以及每个交点对应X轴的值,将所述m以及每个交点对应X轴的值作为该条阈值线对应的特征组,所有阈值线对应的特征组即为所述多个特征组。
- 根据权利要求14所述的方法,其特征在于,所述处理器,具体用于提取所述多个特征组中m在设定范围的p个特征组,计算所述p个特征组中每个特征组的X轴的值的归一化标准差值;计算所述p个特征组中相邻两个特征组的交点个数的差值得到第一差值组,计算p个特征组中相邻两个特征组的X轴的值的归一化标准差值的差值得到第二差值组,提取第一差值组的第i个值与第二差值组的第i个值进行加权运算得到多个加权运算的结果,从多个加权运算的结果从前到后寻找第一个大于加权阈值的第j加权运算结果,将第j加权运算结果的前向特征组确定为第一特征组;所述i,j均为大于等于1的整数;提取所述第一特征组的X轴的值的中值,步频=中值/采样频率。
- 一种计算机可读存储介质,其特征在于,其存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行如权利要求1-5任一项所述的方法。
- 一种计算机程序产品,其特征在于,所述计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,所述计算机程序可操作来使计算机执行如权利要求1-5任一项所述的方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2017/098591 WO2019036927A1 (zh) | 2017-08-23 | 2017-08-23 | 基于步频的足部计步数方法、装置及设备 |
| US16/640,829 US11487965B2 (en) | 2017-08-23 | 2017-08-23 | Method and apparatus for counting foot step based on stride frequency, and device |
| CN201780082882.2A CN110168316B (zh) | 2017-08-23 | 2017-08-23 | 基于步频的足部计步数方法、装置及设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2017/098591 WO2019036927A1 (zh) | 2017-08-23 | 2017-08-23 | 基于步频的足部计步数方法、装置及设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019036927A1 true WO2019036927A1 (zh) | 2019-02-28 |
Family
ID=65439686
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2017/098591 WO2019036927A1 (zh) | 2017-08-23 | 2017-08-23 | 基于步频的足部计步数方法、装置及设备 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11487965B2 (zh) |
| CN (1) | CN110168316B (zh) |
| WO (1) | WO2019036927A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114881091A (zh) * | 2022-06-08 | 2022-08-09 | 深圳市汇泰科电子有限公司 | 一种万能计数频率检测的算法 |
| CN117135582A (zh) * | 2023-04-06 | 2023-11-28 | 荣耀终端有限公司 | 一种运动数据同步方法和装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111639711B (zh) * | 2020-05-29 | 2023-04-18 | 中国地质大学(武汉) | 一种基于压力监测时序数据的输油管线泄漏监测方法 |
| CN113823378A (zh) * | 2020-06-19 | 2021-12-21 | 华为技术有限公司 | 运动次数的确定方法和终端 |
| WO2022180750A1 (ja) | 2021-02-25 | 2022-09-01 | 日本電信電話株式会社 | 推定装置、推定方法、及び推定プログラム |
| CN113723544A (zh) * | 2021-09-02 | 2021-11-30 | 北京卡路里信息技术有限公司 | 运动步数的处理方法、装置和系统,及存储介质和处理器 |
| CN113551687B (zh) * | 2021-09-23 | 2021-12-17 | 珠海市杰理科技股份有限公司 | 计步方法、装置、计步设备、计算机存储介质和芯片 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060161079A1 (en) * | 2005-01-14 | 2006-07-20 | Samsung Electronics Co., Ltd. | Method and apparatus for monitoring human activity pattern |
| CN103175540A (zh) * | 2013-03-10 | 2013-06-26 | 南京中科盟联信息科技有限公司 | 一种高精度步行速度和距离的计算方法 |
| US20140032165A1 (en) * | 2011-03-02 | 2014-01-30 | The Regents Of The Univeristy Of California | Apparatus, system, and method for automatic identification of sensor placement |
| CN104197952A (zh) * | 2014-09-02 | 2014-12-10 | 百度在线网络技术(北京)有限公司 | 一种用户步行计步方法、装置及移动终端 |
| CN104406604A (zh) * | 2014-11-21 | 2015-03-11 | 中国科学院计算技术研究所 | 一种计步方法 |
| CN106931990A (zh) * | 2017-03-24 | 2017-07-07 | 杭州菲特牛科技有限公司 | 一种基于模糊逻辑的跑步状态识别方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6145389A (en) * | 1996-11-12 | 2000-11-14 | Ebeling; W. H. Carl | Pedometer effective for both walking and running |
| CN103792386B (zh) * | 2013-11-21 | 2016-01-20 | 清华大学 | 一种步行方向检测方法和装置 |
| CN103712632B (zh) | 2013-12-31 | 2016-08-24 | 英华达(上海)科技有限公司 | 一种基于3轴加速计的计步方法和计步器 |
| CN103983273B (zh) | 2014-04-29 | 2017-06-06 | 华南理工大学 | 一种基于加速度传感器的实时步长估计方法 |
| KR102141367B1 (ko) * | 2014-05-30 | 2020-08-05 | 닛토덴코 가부시키가이샤 | 사용자의 움직임 분류 및/또는 사용자의 걸음 카운트를 수행하는 장치 및 방법 |
| CN103997572B (zh) | 2014-06-03 | 2016-01-20 | 深圳市爱康伟达智能医疗科技有限公司 | 一种基于手机加速度传感器数据的计步方法和装置 |
| US10197416B2 (en) | 2015-01-21 | 2019-02-05 | Quicklogic Corporation | Multiple axis wrist worn pedometer |
| CN105496416B (zh) | 2015-12-28 | 2019-04-30 | 歌尔股份有限公司 | 一种人体运动状态的识别方法和装置 |
| CN106289309B (zh) | 2016-10-26 | 2019-08-16 | 深圳大学 | 基于三轴加速度传感器的计步方法及装置 |
-
2017
- 2017-08-23 CN CN201780082882.2A patent/CN110168316B/zh active Active
- 2017-08-23 WO PCT/CN2017/098591 patent/WO2019036927A1/zh active Application Filing
- 2017-08-23 US US16/640,829 patent/US11487965B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060161079A1 (en) * | 2005-01-14 | 2006-07-20 | Samsung Electronics Co., Ltd. | Method and apparatus for monitoring human activity pattern |
| US20140032165A1 (en) * | 2011-03-02 | 2014-01-30 | The Regents Of The Univeristy Of California | Apparatus, system, and method for automatic identification of sensor placement |
| CN103175540A (zh) * | 2013-03-10 | 2013-06-26 | 南京中科盟联信息科技有限公司 | 一种高精度步行速度和距离的计算方法 |
| CN104197952A (zh) * | 2014-09-02 | 2014-12-10 | 百度在线网络技术(北京)有限公司 | 一种用户步行计步方法、装置及移动终端 |
| CN104406604A (zh) * | 2014-11-21 | 2015-03-11 | 中国科学院计算技术研究所 | 一种计步方法 |
| CN106931990A (zh) * | 2017-03-24 | 2017-07-07 | 杭州菲特牛科技有限公司 | 一种基于模糊逻辑的跑步状态识别方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114881091A (zh) * | 2022-06-08 | 2022-08-09 | 深圳市汇泰科电子有限公司 | 一种万能计数频率检测的算法 |
| CN117135582A (zh) * | 2023-04-06 | 2023-11-28 | 荣耀终端有限公司 | 一种运动数据同步方法和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11487965B2 (en) | 2022-11-01 |
| US20210042121A1 (en) | 2021-02-11 |
| CN110168316A (zh) | 2019-08-23 |
| CN110168316B (zh) | 2021-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019036927A1 (zh) | 基于步频的足部计步数方法、装置及设备 | |
| CN104424235B (zh) | 实现用户信息聚类的方法和装置 | |
| Ibrahim et al. | CrossCount: A deep learning system for device-free human counting using WiFi | |
| CN102445214B (zh) | 基于智能手机3d重力传感器的计步方法 | |
| CN104135911A (zh) | 多轴线活动监测装置中的活动分类 | |
| US10048383B2 (en) | System and method for graph encoding of physical activity data | |
| CN103699795A (zh) | 一种运动行为识别方法、装置及运动强度监测系统 | |
| CN104812027B (zh) | 基于直觉模糊集多属性决策的网络选择方法 | |
| CN110113116B (zh) | 基于wifi信道信息的人体行为识别方法 | |
| CN108022248A (zh) | 一种基于视觉采集设备的下肢步态康复评估系统 | |
| CN106789338B (zh) | 一种在动态大规模社交网络中发现关键人物的方法 | |
| CN104615881B (zh) | 一种基于移动位置应用的用户常态轨迹分析方法 | |
| CN105444763A (zh) | 一种imu室内定位方法 | |
| CN110147163A (zh) | 面向移动设备的多模型融合驱动的眼动跟踪方法和系统 | |
| CN111768005A (zh) | 轻量级检测模型的训练方法、装置、电子设备及存储介质 | |
| CN107918688A (zh) | 场景模型动态估计方法、数据分析方法及装置、电子设备 | |
| CN105530581A (zh) | 一种基于声音识别的智能穿戴设备和控制方法 | |
| CN115844415A (zh) | 一种基于心电数据的运动稳定性评估方法及系统 | |
| CN106503431A (zh) | 运动数据的处理方法 | |
| CN105574471B (zh) | 用户行为数据的上传方法、用户行为的识别方法及装置 | |
| CN113537685A (zh) | 一种数据处理方法和装置 | |
| WO2019036926A1 (zh) | 基于加速信息的足部计步方法、装置及设备 | |
| CN109740418A (zh) | 一种基于多加速度传感器的瑜伽动作识别方法 | |
| CN105243121A (zh) | 一种基于数据挖掘的文本数据网络构建系统 | |
| Cheng et al. | Deep learning Wi-fi channel state information for fall detection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17922523 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17922523 Country of ref document: EP Kind code of ref document: A1 |