WO2019012869A1 - 臓器モデル - Google Patents
臓器モデル Download PDFInfo
- Publication number
- WO2019012869A1 WO2019012869A1 PCT/JP2018/021732 JP2018021732W WO2019012869A1 WO 2019012869 A1 WO2019012869 A1 WO 2019012869A1 JP 2018021732 W JP2018021732 W JP 2018021732W WO 2019012869 A1 WO2019012869 A1 WO 2019012869A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- organ model
- kidney
- model according
- tube body
- Prior art date
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/28—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine
- G09B23/30—Anatomical models
- G09B23/32—Anatomical models with moving parts
Definitions
- the present invention relates to an organ model comprising a tube body having a conduit into which an endoscope is inserted.
- endoscopes are widely used in the medical field.
- the endoscope can perform observation, treatment, etc. of a test site in an organ by inserting the elongated insertion portion into the organ in the body.
- the training for the purpose of the technical study of the endoscope is performed by the operator using the organ model including the tube body imitating the organ having the duct into which the endoscope can be inserted. It is done.
- the organ is a kidney
- the observation and removal of a calculus in the kidney are to be performed using an endoscope through a ureter
- it has a very narrow internal diameter of about 3 to 4 mm.
- the kidney it is difficult to make the endoscope approach the stone smoothly.
- the organ model disclosed in Japanese Patent Application Publication No. 2002-500941 is configured to merely move an organ and to be specialized to the large intestine. For this reason, there is a problem that even when applied to other organ models, it is impossible to simulate the movement of an organ close to a real clinic.
- the present invention has been made in view of the above problems, and it is possible to provide an organ model having a configuration that simulates the movement of an actual organ by being able to reproduce the interlocking property with respiration, pulsation and the like. To aim.
- the organ model according to one aspect of the present invention includes a tube body having a duct into which an endoscope is inserted, and a bottomed hole communicating with the duct, and the opening of the hole is connected to the tube. And an actuator for periodically vibrating or rocking at least the tube body and the end part.
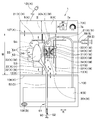
- a perspective view schematically showing an appearance of a training device equipped with a kidney model of the present embodiment A top view of the kidney model disposed in the housing of the training device of FIG. 1 together with the housing from the direction II in FIG. 1
- maintenance part The top view which saw the fixed plate of FIG. 2 from IV direction in FIG. 2
- operation member of FIG. 2 with a guide member An enlarged perspective view showing a kidney unit different from FIG. 2
- FIG. 7 A partial enlarged perspective view showing a modification of the shape of the kidney cup unit of FIG. 7 Partial perspective view showing an example of a unit imitating a linear kidney Partial perspective view showing an example of a unit imitating dendrite type kidney A partial perspective view showing an example of a unit imitating a giant kidney
- the organ model is described by taking a kidney model as an example.
- FIG. 1 is a perspective view schematically showing the appearance of a training device equipped with the kidney model of the present embodiment
- FIG. 2 shows the kidney model in the training device shown in FIG. It is the top view seen with the housing
- FIG. 3 is an enlarged view of the connecting portion between the actuating member and the holding portion surrounded by the line III in FIG. 2, and
- FIG. 4 is a plan view of the fixing plate of FIG. 2 from the IV direction in FIG.
- FIG. 5 is a partial perspective view showing a part of the actuating member of FIG. 2 in an enlarged manner together with a guide member.
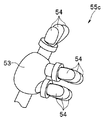
- FIG. 6 is an enlarged perspective view showing a kidney unit different from FIG. 2
- FIG. 7 is a partially enlarged perspective view showing a state in which one kidney cup unit is detachable from the renal pelvis unit in FIG.
- FIG. 8 is a partially enlarged perspective view showing a modification of the shape of the kidney cup unit of FIG.
- FIG. 9 is a partial perspective view showing an example of a unit simulating a linear kidney
- FIG. 10 is a partial perspective view showing an example of a unit simulating a dendrite kidney
- FIG. It is a fragmentary perspective view which shows an example of the unit which imitated.
- a kidney model 1 which is an organ model of the present embodiment is provided in a housing 100 in which an opening 100 k can be freely opened and closed by a lid 101.
- the kidney model 1 is a renal pelvis unit 53 which is a tube body having a channel 53 i into which the endoscope 90 is inserted, and is detachable from the renal cup unit 53.
- a kidney unit 55 is comprised of a kidney cup unit 54 which is an end part having a bottomed hole 54i.
- kidney model 1 in order to simplify a drawing, although the case where only one kidney unit 55 is provided in the kidney model 1 is mentioned as an example and shown as an example, in the human body, two kidneys are shown. In most cases, the kidney model 1 may be provided with two kidney units 55.
- the kidney unit 55 is a kidney unit 55a imitating a linear kidney shown in FIG. 9 listed in a known anatomical atlas, a dendrite type shown in FIG. It is a part of a kidney unit 55b imitating a kidney, and a kidney unit 55c imitating an enlarged kidney shown in FIG.
- the kidney unit 55 has a shape shown in FIG. 2 and a renal pelvis unit 53 ′ which is a tube body having a duct 53i ′ shown in FIG. 6, and the renal pelvis unit 53 ′ is detachable and has a bottomed hole 54i.
- Various shapes can be considered according to the individual differences of the actual human body, such as a shape like a kidney unit 55 'composed of a kidney cup unit 54' which is an end part having a '.
- the shape of the kidney unit 55, 55 ' is of course not limited to the shape shown in FIG. 2 or FIG.
- the renal pelvis unit 53, 53 ' has a shape that imitates an actual renal pelvis, and is made of a flexible resin, rubber or the like.
- the renal pelvis unit 53, 53 ' may be formed of either a translucent member or a non-transparent member.
- the endoscope 90 When the endoscope 90 is inserted into the renal pelvis unit 53 or 53 ′ and illuminated with illumination light if the endoscope 90 is formed of a semitransparent member, the operator can use the renal pelvis unit 53 or the renal pelvis unit 53 through the opening 100k.
- the tip of the insertion portion of the endoscope 90 is located from the outside of the 53 'to where on the renal pelvis unit 53 or 53', that is, the observation position can be easily visually recognized, thus producing an effect that an unskilled operator can easily train .
- the kidney cup unit 54, 54 ' has a shape that imitates an actual kidney cup, and is made of a flexible resin, rubber or the like, similar to the renal pelvis unit 53, 53'.
- the renal cup unit 54, 54 ' may be made of either a translucent member or a nontransparent member for the same reason as the renal pelvis unit 53, 53'.
- the kidney cup unit 54, 54 ' is shown as an example of being configured of three, but may be configured of other than three. Further, it may be configured as one, or as shown in FIG. 8, it may have a configuration provided with a plurality of holes 54i, 54i 'communicating with one opening 54h, 54h'. Absent.
- the openings 54h and 54h ′ are screwing portions that can be screwed on female screw portions 53n and 53n ′ provided in the renal pelvis unit 53 and 53 ′.
- Male threads 54n, 54n ' are provided. Since the male screw parts 54n, 54n 'can be screwed into the female screw parts 53n, 53n', the kidney cup unit 54, 54 'is detachably attached to the renal pelvis unit 53, 53'.
- a watertight member 40 is provided.
- watertight member 40 a sealing material, a rubber material, an O-ring, etc. wound around the outer periphery of male screw part 54n, 54n 'are mentioned.
- the kidney model 1 has a drive unit K that periodically vibrates or swings at least the renal pelvis unit 53, 53 ′ and the renal cup unit 54, 54 ′.
- the drive unit K includes the holding unit H, the operation member M, the power supply 5, the adjustment cam 6 which is the adjustment unit, the control panel 7 which is the adjustment unit, and the guide shaft 10 which is the guide member.
- the main part is configured by including the power supply cord 105 and the movement range restricting plates 106 and 107.
- the holding unit H holds the renal pelvis unit 53, 53 'and the renal cup unit 54, 54' connected to the renal pelvis unit 53, 53 ', that is, the renal unit 55, 55'.
- the control panel 7 periodically moves in the longitudinal direction N.
- the holding portion H includes the holding member 22 for holding the kidney unit 55 or 55 'and the holding plate 21 having the holding member 22 fixed, for example, L-shaped, and the main portion is configured. It is done.
- the holding portion H is composed of two. That is, two holding plates 21 and two holding members 22 are provided. Of course, in the case where there is one kidney unit 55 or 55 ', the holding portion H may be composed of one.
- the holding portion H is disposed in the movement range restricting plates 106 and 107 provided in the housing 100 so as to be guided by the two guide shafts 10 having a longitudinal axis in a predetermined direction. It is connected to an actuating member M that reciprocates in a substantially parallel longitudinal axis direction N.
- the operating member M includes a moving member 30, two fixed columns 30h, two fixed plates 31, two fixed screws 32, two attachment members 33, and four guided members 34.
- the main part is composed.
- the moving member 30 is formed of a flat plate, and has a substantially cylindrical shape provided on each end of the longitudinal axis direction N at both sides in the direction R orthogonal to the longitudinal axis direction N.
- the four guided members 34 are respectively coated on the outer circumferences of the two guide shafts 10.
- the vibration or swing range W of the moving member 30 can be made variable. It has become.
- fixed columns 30 h are provided at substantially the central portion in the direction R of the moving member 30 and at both ends in the longitudinal axis direction N, and two holes 30 ha of each fixed column 30 h are provided.
- the fixed plate 31 is detachable so as to be positioned substantially parallel to the longitudinal axis direction N.
- each fixing screw 32 is detachable from each fixing plate 31. Specifically, a plurality of screw holes 31 h are formed in each fixing plate 31, and the fixing screw 32 can be freely screwed to an arbitrary screw hole 31 h.
- the mounting members 33 are fixed to the fixing screws 32 respectively, and the mounting plate 33 can change the mounting angle freely as described above. As shown in FIG. 3, for example, they are connected by a ball joint 33b. As a result, the holding unit H is connected to the actuating member M.
- kidney units 55 or 55 ' are connected to the actuating member M while being held by the holding unit H.
- the adjustment cam 6 is electrically connected to the moving member 30.
- a control panel 7 to which the power supply 5 and the power cord 105 are extended is electrically connected to the adjustment cam 6.
- the control panel 7 may be fixed to the kidney model 1 or may be operated separately from the kidney model 1.
- the control panel 7 is provided with a power switch 7a and a rotatable variable switch 7b for changing the amplitude or period of vibration or swing.
- the adjustment cam 6 vibrates or swings the operating member M according to the rotational operation position of the variable switch 7b. It adjusts the amplitude or period.
- the holding portion H connected to the actuating member M ie, the kidney unit 55 or 55 'held by the holding portion H also in the longitudinal direction N , Vibrate or oscillate at the amplitude or cycle set by the variable switch 7b.
- the kidney unit 55, 55 ' is made of a material having the above-mentioned flexibility which can be deformed by the application of vibration or rocking by the drive unit K so as not to be damaged by vibration or rocking. ing.
- the kidney unit 55 or 55 ' is connected to a fluid delivery unit S which communicates with the channel 53i and the hole 54i and feeds the fluid to the channel 53i and the hole 54i.
- the liquid feeding portion S includes a liquid feeding tank 8, a liquid feeding conduit 57 which is another conduit, a syringe conduit 58 which is another conduit, and a syringe 59 to constitute a main part. There is.
- One end of the liquid delivery conduit 57 is detachable from the renal pelvis unit 53 or 53 ′, and the other end is detachable from the liquid feeding tank 8.
- Water or physiological saline is stored in the liquid transfer tank 8 and the liquid is fed to the kidney unit 55 or 55 'by opening a valve body (not shown) provided in the liquid transfer channel 57.
- a valve body not shown
- one end of the syringe channel 58 is detachable at a mid position of the liquid feed channel 57, and the syringe 59 is detachable at the other end of the syringe channel 58.
- a colored liquid such as ink or iodine liquid is injected into the syringe 59, and the colored liquid is sent to the kidney unit 55 or 55 'through the syringe line 58 and the liquid sending line 57.
- the bleeding in the body is simulated in the kidney unit 55 or 55 'to simulate the visual field failure of the endoscope 90.
- the drainage unit D capable of draining the fluid in the conduit 53i or the hole 54i is connected to the kidney unit 55 or 55 ′.
- the drainage part D includes a ureteral unit 50 and a drainage port 108, and is configured as a main part.
- the ureteral unit 50 is formed in a tubular shape, and one end thereof is detachable from the renal pelvis unit 53 or 53 ', and an opening 52 for inserting the endoscope 90 inside is formed at the other end.
- the drainage port 51 is opened at an intermediate position.
- the drainage port 51 is opened at a position substantially opposite to the drainage port 108.
- the liquid in the kidney unit 55 or 55 ' is drained from the drainage port 51 when the valve body (not shown) provided in the ureteral unit 50 is opened, and the liquid from the drainage port 108 outside the housing 100 Be drained.
- the liquid drained from the drain port 108 is returned again to the liquid feeding tank 8 by connecting the drain port 108 to the liquid feeding tank 8, and the liquid is discharged to the kidney unit 55 or 55 '. It may be configured to be perfused.
- the observation or treatment with the endoscope 90 inserted in the kidney unit 55 or 55 ' can be performed while the fluid is always stored in the kidney unit 55 or 55' and the ureteral unit 50.
- the endoscope 90 can simulate the condition filled with urine, like a real kidney or ureter.
- the other configurations are similar to those of the conventional kidney model.
- the drive unit K is shown to periodically vibrate or rock at least the kidney unit 55 or 55 '.
- the kidney unit 55 or 55' when observing or treating the inside of the kidney unit 55 or 55 'through the ureteral unit 50, the kidney unit 55 or 55' periodically vibrates or swings. It is possible to simulate the actual movement of the kidney unit 55 or 55 'that moves constantly due to the examiner's breathing, pulsation, etc. by movement close to the human body.
- the adjustment cam 6 and the control panel 7 can freely adjust the amplitude or period of the vibration or swing of the actuating member M and the holding portion H, so that the kidney unit 55 or 55 held by the holding portion H can be freely adjusted. It is possible to simulate the actual movement linked to 'breathing' with movement closer to the human body.
- kidney model 1 having a configuration that simulates the actual movement of the kidney by being able to reproduce the interlocking relationship with respiration and pulsation.
- kidney cup units 54, 54 ' are detachable from the renal pelvis unit 53, 53'.
- kidney cup unit 54, 54 ' from the renal pelvis unit 53, 53'. , 54 'can be easily installed.
- the fluid remaining in the renal pelvis unit 53, 53 'or renal cup unit 54, 54' can be easily dewatered. , Makes the drying operation easier.
- kidney cup units 54, 54 'having various shapes can be attached and detached, individual differences of the human body in the kidney can be more accurately reproduced, so that kidneys of various shapes can be simulated, and the clinical practice can be realized. It is possible to do advanced training close to.
- the holding plate 21 is connected to the mounting member 33 by the ball joint 33b so that the mounting angle can be varied.
- the holding angle of the kidney unit 55 or 55 'held by the holding portion H can be freely changed. For this reason, since individual differences of the human body in the kidney can be reproduced more accurately, since various shapes of the kidney can be simulated, it is possible to perform high-level training close to a real clinic.
- each fixing plate 31 a plurality of screw holes 31h are formed in each fixing plate 31, and the fixing screw 32 can be screwed into any screw hole 31h, so that the mounting position of the fixing screw to the fixing plate 31 can be varied. It has become.
- kidney unit 55 or 55 'is held for two holding portions H is described as an example, but the present invention is not limited to this. Needless to say, the present invention is also applicable to the case where the kidney unit 55 or 55 'is held in each of the sections H.
- the fluid delivery unit S is connected to each kidney unit 55 or 55 ′, and the drainage unit D is connected to each kidney unit 55 or 55 ′.
- the organ model has been described by taking the kidney model 1 as an example, but the present invention is not limited thereto.
- An organ that periodically vibrates or swings in conjunction with respiration, pulsation, etc. It is needless to say that the invention is applicable to the above-described ureteral unit 50 and other organ models such as the lung.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- General Physics & Mathematics (AREA)
- Computational Mathematics (AREA)
- Biophysics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Pure & Applied Mathematics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Theoretical Computer Science (AREA)
- Medicinal Chemistry (AREA)
- Algebra (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Chemical & Material Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Instructional Devices (AREA)
Abstract
内視鏡90が挿入される管路53iを有する腎盂ユニット53と、管路53iに連通する有底の穴54iを有するとともに、穴54iの開口部54hが腎盂ユニット53に接続された腎杯ユニット54と、少なくとも腎盂ユニット53及び腎杯ユニット54を周期的に振動または揺動させる駆動部Kと、を具備する。
Description
本発明は、内視鏡が挿入される管路を有するチューブ体を具備する臓器モデルに関する。
近年、内視鏡は、医療分野において広く利用されている。内視鏡は、細長い挿入部を体内の臓器に挿入することにより、臓器内の被検部位の観察や処置等を行うことができる。
ここで、臓器によっては、臓器内の観察や処置に術者に対して非常に高い技術が要求される場合がある。
よって、内視鏡が挿入可能な管路を有する臓器を模したチューブ体を具備する臓器モデルを用いて、内視鏡の技術研鑽を目的としたトレーニングが術者によって行われていることが知られている。
しかしながら、一般的に市販されている臓器モデルでは、術者が慣れてしまうとトレーニングを容易に行うことが出来てしまうため、トレーニング効果が低いといった問題があった。
このような問題に鑑み、日本国特表2002-500941号公報では、大腸の臓器モデルにおいて、チューブ体である腸管の外側にモータが所定の間隔を有して複数設けられ、モータにより腸管を動かすことによって大腸の動きを模すことにより、内視鏡を用いた大腸内観察、処置トレーニングを、より実際の大腸の動きに則した状態にて行うことができる構成が開示されている。
ところで、例えば、臓器が腎臓の場合、腎臓内の結石の観察や除去を、尿管を介して内視鏡を用いて行おうとすると、内径が略3~4mmと非常に狭く入り組んだ構造を有する腎臓においては、結石に対して内視鏡を円滑にアプローチさせることが難しい。
また、腎臓は、被検者の呼吸や拍動等により絶え間なく動くことから、より結石に対して内視鏡を円滑にアプローチさせることが難しいといった問題があった。
また、腎臓は、被検者の呼吸や拍動等により絶え間なく動くことから、より結石に対して内視鏡を円滑にアプローチさせることが難しいといった問題があった。
尚、この問題は、被検者の呼吸や拍動等により絶え間なく動く尿管の結石や、肺等の内部の腫瘍に対して内視鏡をアプローチさせる場合においても同様である。
よって、このような臓器に対する観察または処置においては、術者に対してより高度な技術が要求されることから、技術研鑽のため、術者はこれらの臓器を模した臓器モデルを用いてトレーニングを行う必要性が高くなる。
しかしながら、日本国特表2002-500941号公報に開示された臓器モデルでは、単に臓器を動かすだけの構成であるとともに大腸に特化した構成である。このため、他の臓器モデルに適用しても実臨床に近い臓器の動きを模擬できないといった問題があった。
本発明は、上記問題点に鑑みなされたものであり、呼吸や拍動等との連動性を再現することができることにより実際の臓器の動きを模した構成を具備する臓器モデルを提供することを目的とする。
本発明の一態様による臓器モデルは、内視鏡が挿入される管路を有するチューブ体と、前記管路に連通する有底の穴を有するとともに、前記穴の開口部が前記チューブ体に接続された端部パーツと、少なくとも前記チューブ体及び前記端部パーツを周期的に振動または揺動させる駆動部と、を具備する。
以下、図面を参照して本発明の実施の形態を説明する。尚、図面は模式的なものであり、各部材の厚みと幅との関係、それぞれの部材の厚みの比率などは現実のものとは異なることに留意すべきであり、図面の相互間においても互いの寸法の関係や比率が異なる部分が含まれていることは勿論である。
尚、以下に示す実施の形態においては、臓器モデルは、腎臓モデルを例に挙げて説明する。
図1は、本実施の形態の腎臓モデルを具備するトレーニング装置の外観を概略的に示す斜視図、図2は、図1のトレーニング装置の筐体内に配置された腎臓モデルを、図1中のII方向から筐体とともにみた上面図である。
また、図3は、図2中のIII線で囲った作動部材と保持部との接続部位を拡大して示す図、図4は、図2の固定プレートを図2中のIV方向からみた平面図、図5は、図2の作動部材の一部を、ガイド部材とともに拡大して示す部分斜視図である。
さらに、図6は、図2とは異なる腎臓ユニットを示す拡大斜視図、図7は、図2の腎盂ユニットに対して1つの腎杯ユニットが着脱自在な様子を示す部分拡大斜視図、図8は、図7の腎杯ユニット形状の変形例を示す部分拡大斜視図である。
また、図9は、線状型腎臓を模したユニットの一例を示す部分斜視図、図10は、樹状突起型腎臓を模したユニットの一例を示す部分斜視図、図11は、膨大型腎臓を模したユニットの一例を示す部分斜視図である。
図1に示すように、本実施の形態の臓器モデルである腎臓モデル1は、蓋体101により開口部100kが開閉自在な筐体100内に設けられている。
具体的には、図2に示すように、腎臓モデル1は、内視鏡90が挿入される管路53iを有するチューブ体である腎盂ユニット53と、該腎杯ユニット53に着脱自在であるとともに有底の穴54iを有する端部パーツである腎杯ユニット54とから構成された腎臓ユニット55を具備している。
尚、図2においては、図面を簡略化するため、腎臓ユニット55は、1つのみ腎臓モデル1に設けられている場合を例に挙げて示しているが、実際、人体は、腎臓は2つ有している場合が殆どであるため、腎臓モデル1に、腎臓ユニット55が2つ設けられていても構わない。
また、腎臓ユニット55は、図9~図11に示すように、既知の解剖学アトラスに挙げられている図9に示す線状型腎臓を模した腎臓ユニット55a、図10に示す樹状突起型腎臓を模した腎臓ユニット55b、図11に示す膨大型腎臓を模した腎臓ユニット55cの一部である。また、腎臓ユニット55は、図2に示す形状や、図6に示す管路53i'を有するチューブ体である腎盂ユニット53'と、該腎盂ユニット53'が着脱自在であるとともに有底の穴54i'を有する端部パーツである腎杯ユニット54'とから構成された腎臓ユニット55'のような形状等々、実際の人体の個人差に則した様々な形状が考えられる。
よって、腎臓ユニット55、55'の形状は、図2または図6に示した形状に限定されないことは勿論である。
腎盂ユニット53、53'は、実際の腎盂を模した形状を有しており、柔軟な樹脂やゴム等から構成されている。
尚、腎盂ユニット53、53'は、半透明部材または非透明部材のどちらから形成されていても構わない。尚、半透明部材から構成されていると、内視鏡90を腎盂ユニット53、または53'に挿入し、照明光を照射した際、術者は、開口部100kを介して、腎盂ユニット53または53'の外側から内視鏡90の挿入部の先端が腎盂ユニット53または53'のどこに位置しているか、即ち観察位置が容易に視認できるため、不慣れな術者がトレーニングしやすいといった効果を生じる。
腎杯ユニット54、54'は、実際の腎杯を模した形状を有しており、腎盂ユニット53、53'と同様に、柔軟な樹脂やゴム等から構成されている。
尚、腎杯ユニット54、54'も腎盂ユニット53、53'と同様の理由により、半透明部材または非透明部材のどちらから形成されていても構わない。
尚、図2においては、腎杯ユニット54、54'は、3つから構成されている場合を例に挙げて示しているが、3つ以外から構成されていても構わない。また、1つから構成されていても構わないし、図8に示すように、1つの開口部54h、54h'に連通する複数の穴54i、54i'が設けられた構成を有していても構わない。
腎杯ユニット54、54'は、腎盂ユニット53、53'に対し、接続後、穴54i、54i' が管路53i、53i'に連通するよう、開口部54h、54h'が着脱自在となっている。
具体的には、図7、図8に示すように、開口部54h、54h'に、腎盂ユニット53、53'に設けられた雌ネジ部53n、53n'に螺合自在な螺合部である雄ネジ部54n、54n'が設けられている。雌ネジ部53n、53n'に対して雄ネジ部54n、54n'が螺合自在なことにより、腎杯ユニット54、54'は、腎盂ユニット53、53'に対して着脱自在となっている。
また、腎盂ユニット53、53'に対して腎杯ユニット54、54'を螺合した際の水密性を確保するため、雄ネジ部54n、54n'、該雄ネジ部54n、54n'の隣接部に、水密部材40が設けられている。
尚、水密部材40としては、雄ネジ部54n、54n'の外周に巻回されるシール材やゴム材、Oリング等が挙げられる。
図2に戻って、腎臓モデル1は、少なくとも腎盂ユニット53、53'及び腎杯ユニット54、54'を周期的に振動または揺動させる駆動部Kを有している。
具体的には、駆動部Kは、保持部Hと、作動部材Mと、電源5と、調整部である調整用カム6と、調整部であるコントロールパネル7と、ガイド部材であるガイド軸10と、電源コード105と、移動範囲規制板106、107とを具備して主要部が構成されている。
保持部Hは、腎盂ユニット53、53'及び該腎盂ユニット53、53'に接続された腎杯ユニット54、54'、即ち、腎臓ユニット55、55'を保持するものであり、調整用カム6、コントロールパネル7により長手軸方向Nにおいて周期的に運動するものである。
具体的には、保持部Hは、腎臓ユニット55または55'を保持する保持部材22と、該保持部材22が固定された、例えばL字状の保持プレート21とを具備して主要部が構成されている。
尚、上述したように、腎臓モデル1には、腎臓ユニット55または55'は、2つ設けられていても良いことから、保持部Hは2つから構成されている。即ち、保持プレート21及び保持部材22は、2つ設けられている。勿論、腎臓ユニット55または55'が1つの場合は、保持部Hは、1つから構成されていても構わない。
保持部Hは、筐体100内に設けられた移動範囲規制板106、107内において、所定の方向に長手軸を有する2本のガイド軸10にガイドされるよう配置されており、長手軸と略平行な長手軸方向Nに往復移動する作動部材Mに接続されている。
作動部材Mは、移動部材30と、2本の固定柱30hと、2枚の固定プレート31と、2つの固定ネジ32と、2つの取り付け部材33と、4つの被ガイド部材34とを具備して主要部が構成されている。
図5に示すように、移動部材30は、平板から構成されており、長手軸方向Nの略直交する方向Rの両側部における長手軸方向Nの各端部に、それぞれ設けられた略円筒状の4つの被ガイド部材34が2本のガイド軸10の外周にそれぞれ被覆されている。
このことにより、2本のガイド軸10に長手軸方向Nに移動自在に軸支された状態で、図2に示すように、長手軸方向Nにおいて移動範囲規制板106、107によって規定された振動または揺動範囲Wにおいて振動または揺動自在となっている。
尚、移動範囲規制板106、107は、筐体100内において、長手軸方向Nに移動自在に固定できるよう構成されていることから、移動部材30の振動または揺動範囲Wは、可変自在となっている。
また、図5に示すように、移動部材30の方向Rにおける略中央部かつ長手軸方向Nの両端部に、それぞれ固定柱30hが設けられており、各固定柱30hの孔30haに、2枚の固定プレート31が、長手軸方向Nと略平行に位置するよう着脱自在となっている。
さらに、各固定プレート31に、各固定ネジ32がそれぞれ着脱自在となっている。具体的には、各固定プレート31には、複数のネジ孔31hが形成されており、任意のネジ孔31hに対して固定ネジ32は螺合自在となっている。
また、図2、図3に示すように、各固定ネジ32に、取り付け部材33がそれぞれ固定されており、取り付け部材33には、上述した保持プレート21が、取り付け角度が可変自在となるよう、図3に示すように、例えばボールジョイント33bにより接続されている。このことにより、保持部Hは、作動部材Mに接続されている。
即ち、1つまたは2つの腎臓ユニット55または55'は、保持部Hに保持された状態で作動部材Mに接続される。
また、図2に示すように、移動部材30に、調整用カム6が電気的に接続されている。尚、調整用カム6には、電源5及び電源コード105が延出されたコントロールパネル7が電気的に接続されている。尚、コントロールパネル7は、腎臓モデル1に固定されていても良いし、腎臓モデル1から離間して操作できるようにしてもよい。
尚、コントロールパネル7には、電源スイッチ7aと、振動または揺動の振幅あるいは周期を可変するための回動自在な可変スイッチ7bとが設けられている。
調整用カム6は、電源コード105が電源に電気的に接続された状態において、電源スイッチ7aがオンされた際、可変スイッチ7bの回動操作位置に応じた作動部材Mの振動または揺動の振幅あるいは周期を調整するものである。
尚、作動部材Mが、長手軸方向Nにおいて振動または揺動すると、作動部材Mに接続された保持部H、即ち、保持部Hに保持された腎臓ユニット55または55'も長手軸方向Nにおいて、可変スイッチ7bにより設定された振幅または周期で振動または揺動する。
このことにより、振動または揺動により破損することがないよう、腎臓ユニット55、55'は、駆動部Kによる振動または揺動の付与により変形可能な上述したような柔軟性を有する材料から構成されている。
腎臓ユニット55または55'に、管路53i及び穴54iに連通し、管路53i及び穴54iに送液する送液部Sが接続されている。
送液部Sは、送液タンク8と、他の管路である送液管路57と、他の管路であるシリンジ管路58と、シリンジ59とを具備して主要部が構成されている。
送液管路57は、一端が腎盂ユニット53または53'に対して着脱自在であるとともに、他端が送液タンク8に着脱自在となっている。
送液タンク8は、水または生理食塩水が貯留されており、送液管路57に設けられた図示しない弁体が開放されることにより、腎臓ユニット55または55'に送液する。このことによって、内視鏡90から送液しなくとも、腎臓ユニット55または55'内の内視鏡90の視野をクリアにするとともに、腎臓ユニット55または55'内に液体を注入することにより実際の腎臓内における尿を模す。
また、送液管路57の中途位置には、シリンジ管路58の一端が着脱自在となっており、シリンジ管路58の他端に、シリンジ59が着脱自在となっている。
シリンジ59には、インクまたはヨード液等の有色の液体が注入されており、シリンジ管路58、送液管路57を介して有色の液体を、腎臓ユニット55または55'に送液する。このことにより、腎臓ユニット55または55'において体内の出血を模擬して、内視鏡90の視野不良を模擬する。
さらに、腎臓ユニット55または55'に、管路53iまたは穴54i内の液体を排出可能な排液部Dが接続されている。
排液部Dは、尿管ユニット50と、排液口108とを具備して主要部が構成されている。尿管ユニット50は、チューブ状に形成されているとともに、一端が腎盂ユニット53または53'に着脱自在であり、他端に内視鏡90を内部に挿通するための開口52が形成されている。さらに、中途位置に、排液口51が開口されている。尚、排液口51は、排液口108に略対向する位置に開口されている。
よって、腎臓ユニット55または55'内の液体は、尿管ユニット50に設けられた図示しない弁体が開放されると、排液口51から排液され、筐体100外に排液口108から排液される。
尚、排液口108が、送液タンク8と接続されることにより、排液口108から排出された液体が、再度送液タンク8に戻され、腎臓ユニット55または55'に対して液体を灌流させる構成であっても構わない。
このことにより、腎臓ユニット55または55'内及び尿管ユニット50内に常時液体が貯留された状態で、腎臓ユニット55または55'内に挿入された内視鏡90による観察または処置を行うことができることから、実際の腎臓または尿管のように、尿で満たされた状態を模擬することができる。
尚、その他の構成は、従来の腎臓モデルと同様である。
このように、本実施の形態においては、駆動部Kは、少なくとも腎臓ユニット55または55'を周期的に振動または揺動させると示した。
このことによれば、尿管ユニット50を介して腎臓ユニット55または55'内を観察あるいは処置している際に、腎臓ユニット55または55'は、周期的に振動または揺動することから、被検者の呼吸や拍動等により絶え間なく動く腎臓ユニット55または55'の実際の動きを、人体に近い動きにて模擬することができる。
また、調整用カム6、コントロールパネル7により、作動部材M、保持部Hの振動または揺動の振幅あるいは周期を自在に調整することができることから、保持部Hによって保持された腎臓ユニット55または55'の呼吸に連動した実際の動きを、より人体に近い動きにて模擬することができる。
以上から、呼吸や拍動との連動性を再現することができることにより実際の腎臓の動きを模した構成を具備する腎臓モデル1を提供することができる。
加えて、本実施の形態においては、腎盂ユニット53、53'に対して1つまたは複数の腎杯ユニット54、54'が着脱自在であると示した。
このことによれば、腎盂ユニット53、53'から容易に腎杯ユニット54、54'を取り外すことができるため、トレーニングに用いる結石を模したものを、腎盂ユニット53、53'または腎杯ユニット54、54'に容易に設置することができる。
さらには、トレーニング終了後、排液部Dを用いて排液したとしても、腎盂ユニット53、53'または腎杯ユニット54、54'内に残留してしまう液体を容易に脱水することができるため、乾燥作業が容易となる。
また、様々な形状を有する腎杯ユニット54、54'を着脱することができるため、腎臓における人体の個体差をより正確に再現することができることから、様々な形状の腎臓が模擬でき、実臨床に近い高度なトレーニングを行うことができる。
加えて、上述した本実施の形態においては、ボールジョイント33bにより、取り付け部材33に対して保持プレート21が、取り付け角度が可変自在となるよう接続されていると示した。
このことによれば、保持部Hに保持される腎臓ユニット55または55'の保持角度も自在に可変することができる。このため、腎臓における人体の個体差をより正確に再現することができることから、様々な形状の腎臓が模擬できるため、実臨床に近い高度なトレーニングを行うことができる。
さらに、各固定プレート31に、複数のネジ孔31hが形成されており、任意のネジ孔31hに対して固定ネジ32が螺合自在なことにより、固定プレート31に対する固定ネジの取り付け位置が可変自在となっている。
このため、保持部Hに保持される腎臓ユニット55または55'の取り付け位置も自在に可変することができることから、腎臓における人体の個体差をより正確に再現することができる。このため、様々な形状の腎臓が模擬できることから、実臨床に近い高度なトレーニングを行うことができる。
尚、上述した本実施の形態においては、2つの保持部Hに対して、1つの腎臓ユニット55または55'が保持された場合を例に挙げて示したが、これに限らず、2つの保持部Hそれぞれに腎臓ユニット55または55'が保持された場合においても適用可能であることは云うまでもない。
この場合、各腎臓ユニット55または55'に、送液部Sがそれぞれ接続され、各腎臓ユニット55または55'に排液部Dがそれぞれ接続されていれば良い。
また、上述した本実施の形態においては、臓器モデルは、腎臓モデル1を例に挙げて示したが、これに限らず、呼吸や拍動等に連動して周期的に振動または揺動する臓器であれば、上述した尿管ユニット50や、肺等の他の臓器モデルにも適用可能であることは云うまでもない。
本出願は、2017年7月12日に日本国に出願された特願2017-136045号を優先権主張の基礎として出願するものであり、上記の内容は、本願明細書、請求の範囲、図面に引用されたものである。
Claims (14)
- 内視鏡が挿入される管路を有するチューブ体と、
前記管路に連通する有底の穴を有するとともに、前記穴の開口部が前記チューブ体に接続された端部パーツと、
少なくとも前記チューブ体及び前記端部パーツを周期的に振動または揺動させる駆動部と、
を具備することを特徴とする臓器モデル。 - 前記駆動部は、振動または揺動の振幅あるいは周期を調整する調整部を有することを特徴とする請求項1に記載の臓器モデル。
- 前記駆動部は、前記チューブ体または前記端部パーツを保持する保持部を有することを特徴とする請求項2に記載の臓器モデル。
- 前記保持部は、前記調整部により周期的に運動することを特徴とする請求項3に記載の臓器モデル。
- 前記保持部は、所定の方向に長手軸を有するガイド部材にガイドされるよう配置されており、さらに、前記駆動部の一部である前記長手軸と略平行に移動する作動部材に接続されていることを特徴とする請求項4に記載の臓器モデル。
- 前記作動部材は、前記長手軸と略平行な方向に往復運動することを特徴とする請求項5に記載の臓器モデル。
- 前記作動部材は、前記保持部とボールジョイントにより接続されていることを特徴とする請求項6に記載の臓器モデル。
- さらに前記管路及び前記有底の穴に連通し、前記管路及び前記有底の穴に送液する送液部を有することを特徴とする請求項1に記載の臓器モデル。
- 前記端部パーツの前記開口部は、前記チューブ体に着脱自在であることを特徴とする請求項1に記載の臓器モデル。
- 前記端部パーツの前記開口部は、前記チューブ体に螺合する螺合部を有することを特徴とする請求項9に記載の臓器モデル。
- 前記螺合部または該螺合部の隣接部に、前記螺合部を前記チューブ体に螺合したときに水密を確保する水密部材が設けられていることを特徴とする請求項10に記載の臓器モデル。
- 前記端部パーツに、前記有底の穴は複数設けられていることを特徴とする請求項1に記載の臓器モデル。
- 前記チューブ体に、複数の前記端部パーツが着脱自在であることを特徴とする請求項1に記載の臓器モデル。
- 前記チューブ体は、前記駆動部による振動または揺動の付与により変形可能な柔軟性を有していることを特徴とする請求項1に記載の臓器モデル。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-136045 | 2017-07-12 | ||
| JP2017136045 | 2017-07-12 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019012869A1 true WO2019012869A1 (ja) | 2019-01-17 |
Family
ID=65001176
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/021732 WO2019012869A1 (ja) | 2017-07-12 | 2018-06-06 | 臓器モデル |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2019012869A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10211160A (ja) * | 1997-01-29 | 1998-08-11 | Olympus Optical Co Ltd | 大腸内視鏡挿入練習装置 |
| JP2002500941A (ja) * | 1998-01-26 | 2002-01-15 | シンバイオニクス リミテッド | 内視鏡のチュートリアルシステム |
| JP2015085017A (ja) * | 2013-10-31 | 2015-05-07 | オリンパスメディカルシステムズ株式会社 | 内視鏡用トレーニング装置 |
-
2018
- 2018-06-06 WO PCT/JP2018/021732 patent/WO2019012869A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10211160A (ja) * | 1997-01-29 | 1998-08-11 | Olympus Optical Co Ltd | 大腸内視鏡挿入練習装置 |
| JP2002500941A (ja) * | 1998-01-26 | 2002-01-15 | シンバイオニクス リミテッド | 内視鏡のチュートリアルシステム |
| JP2015085017A (ja) * | 2013-10-31 | 2015-05-07 | オリンパスメディカルシステムズ株式会社 | 内視鏡用トレーニング装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2765731T3 (es) | Modelos y métodos de simulación de tejido | |
| AU2013215034B2 (en) | Cardiac simulation device | |
| KR102105979B1 (ko) | 복강경 절차들을 위한 수술 훈련 모델 | |
| AU755575B2 (en) | Clinical and/or surgical training apparatus | |
| US20110217684A1 (en) | System for evaluating cardiac surgery training | |
| US20140322688A1 (en) | System for evaluating cardiac surgery training | |
| JP6133015B2 (ja) | 手技シミュレータ及びそれを用いたシミュレーション方法 | |
| KR102290797B1 (ko) | 인공 신장 모듈 및 이를 포함하는 신장 내시경 시뮬레이터 시스템 | |
| WO2019012868A1 (ja) | 臓器モデル | |
| JP2006189525A (ja) | シミュレーション用人工腕 | |
| WO2019012869A1 (ja) | 臓器モデル | |
| CN215868359U (zh) | 一种手术模拟装置及手术训练系统 | |
| EP2869286B1 (de) | Modell zum Trainieren einer Untersuchung und/oder Behandlung von Läsionen im Verdauungstrakt | |
| CN113793545A (zh) | 一种手术模拟装置及手术训练系统 | |
| CN102481173A (zh) | 钳子支承装置 | |
| CN208488894U (zh) | 一种手术缝合路径演示模型 | |
| WO2014178702A1 (es) | Simulador de examen ginecológico bovino para el diagnóstico del ciclo estral | |
| ES2144375B1 (es) | Dispositivo de entrenamiento para cirugia laparoscopica. | |
| KR20210092424A (ko) | 연동운동 및 분절운동을 구현하여 위장운동을 모사하는 장치 | |
| CN117238198B (zh) | 一种显微输精管附睾吻合手术模拟练习器 | |
| CN214377052U (zh) | 腹腔无菌教学装置 | |
| KR20240080811A (ko) | 수술 훈련 장치 | |
| CN217113615U (zh) | 一种肝动脉插管假体模型 | |
| JP2024533765A (ja) | 模擬組織構造体組成物及び外科用トレーニングのための使用方法 | |
| KR102718882B1 (ko) | 시뮬레이션된 조직 모델들 및 방법들 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18831874 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18831874 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |