WO2016114073A1 - 接合システムおよび接合方法 - Google Patents
接合システムおよび接合方法 Download PDFInfo
- Publication number
- WO2016114073A1 WO2016114073A1 PCT/JP2015/085546 JP2015085546W WO2016114073A1 WO 2016114073 A1 WO2016114073 A1 WO 2016114073A1 JP 2015085546 W JP2015085546 W JP 2015085546W WO 2016114073 A1 WO2016114073 A1 WO 2016114073A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- substrate
- unit
- holding unit
- holding
- temperature
- Prior art date
Links
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K20/00—Non-electric welding by applying impact or other pressure, with or without the application of heat, e.g. cladding or plating
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
Definitions
- the present invention relates to a joining system and a joining method.
- An object of one embodiment is to provide a joining system and a joining method that can improve joining accuracy.
- the heat treatment apparatus includes: a first holding unit that holds the first substrate by electrostatic adsorption force; a second holding unit that holds the second substrate by electrostatic adsorption force; the first substrate and the second substrate at a first temperature; A first heating section for heating the The bonding apparatus includes a third holding unit that holds the first substrate by electrostatic adsorption force, a fourth holding unit that holds the second substrate by electrostatic adsorption force, the first substrate, and the second substrate from the first temperature.
- a pressurizing unit that presses the first substrate and the second substrate by relatively approaching the second heating unit, the third holding unit, and the fourth holding unit that heat to a high second temperature is provided.
- Another aspect of the present invention is a bonding method, wherein a first holding unit that holds a first substrate by electrostatic adsorption force, a second holding unit that holds a second substrate by electrostatic adsorption force, the first substrate, and By using a heat treatment apparatus having a first heating unit for heating the second substrate to a first temperature, a heat treatment step for heating the first substrate and the second substrate to the first temperature, A third holding unit for holding the first substrate; a fourth holding unit for holding the second substrate by electrostatic attraction; and a second temperature higher than the first temperature for the first substrate and the second substrate.
- a bonding device having a second heating section that heats to a temperature, a third holding section, and a fourth pressing section that pressurize the first substrate and the second substrate by relatively approaching the fourth holding section; And using the first substrate and the second substrate heated to the second temperature. In and a bonding step of bonding.
- bonding accuracy can be improved.
- FIG. 1 is a diagram illustrating a configuration of a joining system according to the present embodiment.
- FIG. 2 is a diagram showing the configuration of the heat treatment apparatus.
- FIG. 3 is a diagram illustrating a configuration of the bonding apparatus.
- FIG. 4 is a diagram illustrating a configuration of the first holding unit and its periphery.
- FIG. 5 is a diagram illustrating a configuration of the cooling unit.
- FIG. 6 is a schematic side view showing the configuration of the horizontal position adjustment unit.
- FIG. 7 is a schematic bottom view showing the configuration of the horizontal position adjustment unit.
- FIG. 8 is a diagram illustrating a configuration of the second holding unit and its periphery.
- FIG. 9 is a diagram illustrating the configuration of the pressurizing unit and the horizontality adjusting unit.
- FIG. 1 is a diagram illustrating a configuration of a joining system according to the present embodiment.
- FIG. 2 is a diagram showing the configuration of the heat treatment apparatus.
- FIG. 3 is a diagram
- FIG. 10 is a diagram illustrating a configuration of the contact portion.
- FIG. 11 is a diagram illustrating a configuration of a contact portion according to a modification.
- FIG. 12 is a view of the horizontality adjusting unit as viewed from above.
- FIG. 13 is a diagram illustrating a configuration of the alignment mark detection unit.
- FIG. 14 is a diagram illustrating an example of alignment marks provided on the first substrate.
- FIG. 15 is a diagram illustrating an example of alignment marks provided on the second substrate.
- FIG. 16 is a diagram showing the rated operating temperature range of the electrostatic chuck.
- FIG. 17 is a diagram illustrating a rated operating temperature range of the electrostatic chuck according to the modification.
- FIG. 18 is a flowchart showing a series of processing procedures executed in the joining system.
- FIG. 11 is a diagram illustrating a configuration of a contact portion according to a modification.
- FIG. 12 is a view of the horizontality adjusting unit as viewed from above.
- FIG. 19 is a flowchart illustrating the processing procedure of the joining process.
- FIG. 20 is a diagram illustrating an operation example of the horizontality adjustment processing.
- FIG. 21 is a diagram illustrating an operation example of the horizontality adjustment processing.
- FIG. 22 is a diagram illustrating an operation example of the horizontality adjustment processing.
- FIG. 23 is a diagram illustrating an operation example of the horizontal position adjustment processing.
- FIG. 24 is a diagram illustrating an operation example of the horizontal position adjustment processing.
- FIG. 25 is a diagram illustrating an operation example of the horizontal position adjustment processing.
- FIG. 26 is a diagram illustrating an operation example of the temporary pressurizing process.
- FIG. 27 is a diagram illustrating an operation example of the pressurizing process.
- FIG. 1 is a diagram illustrating a configuration of a joining system according to the present embodiment.
- the X-axis direction, the Y-axis direction, and the Z-axis direction that are orthogonal to each other are defined, and the positive direction of the Z-axis is the vertically upward direction.
- the bonding system 100 forms a superposed substrate T by bonding a first substrate W1 and a second substrate W2.
- the joining system 100 includes a carry-in / out station 1, an aligner 2 with a reversing mechanism (hereinafter simply referred to as “aligner 2”), a load lock chamber 3, a transfer chamber 4, and a heat treatment apparatus. 5 and the joining device 6.
- aligner 2 with a reversing mechanism (hereinafter simply referred to as “aligner 2”)
- load lock chamber 3 a load lock chamber 3
- transfer chamber 4 a heat treatment apparatus. 5 and the joining device 6.
- the carry-in / out station 1 includes a mounting table 7 and a transfer area 8.
- the mounting table 7 includes a plurality of (for example, four) cassette mounting plates 101.
- cassettes C1 to C3 capable of storing a plurality of (for example, 25) substrates in a horizontal state are respectively mounted.
- the cassette C1 is a cassette that accommodates the first substrate W1
- the cassette C2 is a cassette that accommodates the second substrate W2
- the cassette C3 is a cassette that accommodates the overlapping substrate T.
- the conveyance area 8 is arranged adjacent to the Y-axis positive direction side of the mounting table 7.
- a transport path 102 extending along the X-axis direction and a first transport device 103 that can move along the transport path 102 are provided.
- the first transfer device 103 is also movable in the Y-axis direction and can be swung around the Z-axis, and the first substrate W1, the second substrate W2, and the polymerization with respect to the cassettes C1 to C3, the aligner 2 and the load lock chamber 3
- the substrate T is carried in and out.
- a cassette or the like for collecting a substrate having a defect may be placed on the cassette placing plate 101. *
- the aligner 2 is disposed adjacent to the transport region 8 on the Y axis positive direction side.
- the aligner 2 adjusts the horizontal positions of the first substrate W1 and the second substrate W2.
- the aligner 2 detects the position of the orientation flat or notch formed on the first substrate W1 and the second substrate W2, and performs a pre-alignment process for matching the detected orientation flat or notch position to a predetermined position.
- the aligner 2 has a reversing mechanism that reverses the front and back of the first substrate W1.
- the load lock chamber 3 is disposed adjacent to the transfer region 8 on the Y axis positive direction side via a gate valve 9a.
- a delivery unit for delivering the first substrate W 1, the second substrate W 2, and the superposed substrate T is provided in the load lock chamber 3.
- the delivery unit is a wafer mounting unit (cooling plate) having a cooling function, and can cool the temperature of the superposed substrate T after the bonding process to, for example, room temperature.
- the transfer chamber 4 is disposed adjacent to the load lock chamber 3 on the Y axis positive direction side via a gate valve 9b.
- a second transfer device 104 is disposed in the transfer chamber 4.
- the second transfer device 104 includes an arm portion that can be expanded and contracted along the horizontal direction and a base portion that can be swung around the Z-axis, and the first substrate W1 with respect to the load lock chamber 3, the heat treatment device 5, and the bonding device 6.
- the second substrate W2 and the superposed substrate T are carried in and out. *
- the heat processing apparatus 5 is arrange
- the heat treatment apparatus 5 performs a preheating process for heating the first substrate W1 and the second substrate W2 to a predetermined temperature before the bonding process by the bonding apparatus 6.
- the configuration of the heat treatment apparatus 5 will be described later. *
- the joining device 6 is disposed adjacent to the transfer chamber 4 on the Y axis positive direction side via a gate valve 9d.
- the bonding apparatus 6 bonds the first substrate W1 and the second substrate W2 to form the superposed substrate T.
- the configuration of the joining device 6 will be described later. *
- the joining system 100 includes a control device 200.
- the control device 200 controls the operation of the bonding system 100.
- the control device 200 is a computer, for example, and includes a control unit and a storage unit (not shown).
- the storage unit is configured by a storage device such as a RAM (Random Access Memory), a ROM (Read Only Memory), and a hard disk, and stores a program for controlling various processes such as a joining process.
- the control device 200 is a CPU (Central Processing Unit), for example, and controls the operation of the bonding system 100 by reading and executing a program stored in the storage unit. *
- CPU Central Processing Unit
- the program may be recorded on a computer-readable recording medium and may be installed from the recording medium in the storage unit of the control device 200.
- Examples of the computer-readable recording medium include a hard disk (HD), a flexible disk (FD), a compact disk (CD), a magnetic optical disk (MO), and a memory card. *
- FIG. 2 is a diagram illustrating a configuration of the heat treatment apparatus 5. *
- the heat treatment apparatus 5 includes a chamber 501, a first holding unit 502, and a second holding unit 503. *
- the chamber 501 is a container whose inside can be sealed, and accommodates the first holding unit 502 and the second holding unit 503.
- the chamber 501 includes a loading / unloading port 511 that is opened and closed by the gate valve 9 c, an intake port 512 for sucking the inside of the chamber 501, and a supply port 513 for supplying a processing gas into the chamber 501.
- An intake device 514 is connected to the intake port 512.
- a processing gas supply source 516 is connected to the supply port 513 through a valve 515. *
- a processing gas for removing oxide films on the surfaces of the first substrate W1 and the second substrate W2 is supplied from the processing gas supply source 516 into the chamber 501.
- formic acid gas is used as the processing gas, but the processing gas is not necessarily required to be formic acid.
- the first holding unit 502 includes an electrostatic chuck 521, a heating unit 522, and a cooling unit 523.
- the electrostatic chuck 521 is attached to the lower surface of the cooling unit 523 with the attracting surface facing downward, and the cooling unit 523 is attached to the ceiling surface of the chamber 501.
- the heating unit 522 is built in the electrostatic chuck 521. *
- the electrostatic chuck 521 includes an internal electrode (not shown) and a dielectric (not shown), and uses the electrostatic force generated by applying a voltage to the internal electrode to place the first substrate W1 on the suction surface. Adsorb.
- the heating unit 522 is, for example, a sheathed heater or a ceramic heater, and heats the first substrate W ⁇ b> 1 held by the electrostatic chuck 521 by heating the electrostatic chuck 521.
- the cooling unit 523 is configured by laminating a cooling jacket and a heat insulating material, for example. *
- the second holding unit 503 includes an electrostatic chuck 531, a heating unit 532, and a cooling unit 533.
- the electrostatic chuck 531 is attached to the upper surface of the cooling unit 533 with the suction surface facing upward, and the cooling unit 533 is attached to the bottom surface of the chamber 501.
- the heating unit 532 is built in the electrostatic chuck 531.
- the configurations of the electrostatic chuck 531, the heating unit 532, and the cooling unit 533 are the same as the configurations of the electrostatic chuck 521, the heating unit 522, and the cooling unit 523 included in the first holding unit 502, and thus description thereof is omitted here. To do. *
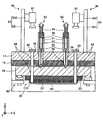
- FIG. 3 is a diagram illustrating a configuration of the joining device 6. *
- the joining device 6 includes a frame structure 10, a first holding unit 20, a second holding unit 30, a chamber 40, a suspension mechanism 50, and a horizontal position adjusting unit 60.
- the bonding apparatus 6 includes a pressure unit 70, a levelness adjustment unit 80, and an alignment mark detection unit 90. *
- the chamber 40 is a container whose inside can be sealed, and houses the first holding unit 20 and the second holding unit 30.
- the chamber 40 is provided with an intake port 41 for sucking the inside of the chamber 40.
- An intake device 42 is connected to the intake port 41.
- the chamber 40 includes a first support member 11, a second support member 12, and a partition wall 45 provided between the first support member 11 and the second support member 12. *
- the first holding unit 20 is a holding unit that holds the first substrate W ⁇ b> 1 and is provided on the lower surface of the first support member 11 of the frame structure 10 via the spacer 14.
- the first holding unit 20 includes a heating unit (not shown). *
- the suspension mechanism 50 holds the first holding unit 20 in a state of being suspended from above. With the suspension mechanism 50, the first holding unit 20 is arranged with a gap between the first holding unit 20 and the spacer 14.
- the horizontal position adjustment unit 60 adjusts the horizontal position of the first holding unit 20.
- the horizontal position is the position and orientation in the horizontal direction. The configurations of the suspension mechanism 50 and the horizontal position adjustment unit 60 will be described later. *
- the second holding unit 30 is a holding unit that holds the second substrate W ⁇ b> 2 and is provided so as to be able to contact with and separate from the upper surface of the second support member 12 of the frame structure 10. Further, the second holding unit 30 is disposed to face the lower side of the first holding unit 20.
- the second holding unit 30 includes a heating unit (not shown). *
- the pressure unit 70 includes a fixed shaft 71 connected to the center of the second holding unit 30, a movable shaft 72 disposed on the same axis as the fixed shaft 71, and a drive unit that moves the movable shaft 72 in the vertical direction. 73.
- the pressurizing unit 70 uses the driving unit 73 to move the movable shaft 72 in the vertical direction and abuts against the fixed shaft 71.
- the second holding unit 30 approaches the first holding unit 20, and the second substrate W ⁇ b> 2 held by the second holding unit 30 is pressed against the first substrate W ⁇ b> 1 held by the first holding unit 20. . *
- the level adjustment unit 80 is connected to the outer peripheral side of the second holding unit 30 with respect to the pressing unit 70.
- the level adjustment unit 80 is connected to the support plate 81, the plurality of first support members 82 having one end connected to the support plate 81, and the other end of the first support member 82.
- the level adjustment unit 80 adjusts the height of the outer peripheral portion of the second holding unit 30 by individually moving the plurality of first support members 82 along the vertical direction using the plurality of driving units 83. Thereby, the level of the second holding unit 30 is adjusted.
- the pressing units 70 and the drive units 73 and 83 of the horizontality adjusting unit 80 are fixed to the third support member 13 of the frame structure 10. *
- the alignment mark detection unit 90 includes an imaging unit 91 provided above the first support member 11 and a light source 92 provided below the second support member 12.
- the light source 92 is disposed outside the chamber 40 and irradiates the first substrate W1 and the second substrate W2 with light through the through holes formed in the second support member 12 and the second holding unit 30.
- the light emitted from the light source 92 is infrared light.
- the imaging unit 91 is disposed outside the chamber 40 and is provided in the first substrate W1 and the second substrate W2 through through holes formed in the first support member 11, the spacer 14, and the first holding unit 20. Capture the mark.
- the imaging result obtained by the imaging unit 91 is output to the control device 200. *
- the bonding device 6 is configured as described above, and the inside of the chamber 40 is depressurized using the intake device 42 and the first substrate is used using the heating unit built in the first holding unit 20 and the second holding unit 30. W1 and the second substrate W2 are heated. Further, the joining device 6 adjusts the horizontal position of the first holding unit 20 using the horizontal position adjusting unit 60 based on the detection result of the alignment mark detecting unit 90. Further, the joining device 6 adjusts the level of the second holding unit 30 using the level adjustment unit 80. And the joining apparatus 6 presses the 1st board
- FIG. 4 is a diagram illustrating a configuration of the first holding unit 20 and its periphery.
- the first holding unit 20 includes an electrostatic chuck 21, a heating unit 22, a cooling unit 23, and a plate 24.
- a suspension mechanism 50 is connected to the upper surface of the plate 24.
- a horizontal position adjusting unit 60 is connected to the outer peripheral portion of the lower surface of the plate 24.
- the cooling unit 23 has a smaller diameter than the plate 24 and is attached to the center of the lower surface of the plate 24.
- the electrostatic chuck 21 has a smaller diameter than the cooling unit 23 and is attached to the center of the lower surface of the cooling unit 23.
- the heating unit 22 is built in the electrostatic chuck 21.
- the electrostatic chuck 21 does not necessarily have a smaller diameter than the cooling unit 23. *
- the electrostatic chuck 21 includes an internal electrode and a dielectric, and uses the electrostatic force generated by applying a voltage to the internal electrode to adsorb the first substrate W1 to the adsorption surface.
- the heating unit 22 is, for example, a sheathed heater or a ceramic heater, and heats the electrostatic chuck 21 to heat the first substrate W1 held on the electrostatic chuck 21. *
- the cooling unit 23 is configured by laminating a cooling jacket and a heat insulating material, for example.
- FIG. 5 is a diagram illustrating a configuration of the cooling unit 23. *
- the cooling unit 23 includes a first cooling jacket 231, a second cooling jacket 232, and a heat insulating material 233.
- the first cooling jacket 231 is provided adjacent to the plate 24, the second cooling jacket 232 is provided adjacent to the first holding part 20, and the heat insulating material 233 includes the first cooling jacket 231 and the second cooling jacket. 232. *
- the first cooling jacket 231 always operates during a series of joining processes. Thereby, the thermal influence on the plate 24, the imaging part 91, etc. can be suppressed.
- the second cooling jacket 232 operates only while the superposed substrate T is cooled after the first substrate W1 and the second substrate W2 are joined. Thereby, the superposition
- the cooling units 523 and 533 included in the first holding unit 502 and the second holding unit 503 of the heat treatment apparatus 5 may have the same configuration as the cooling unit 23 described above. *
- the suspension mechanism 50 includes a main body 51, a wire 52, a support 53, an elastic member 54, a seal member 55, and a fixing portion 56.
- the main body 51 is a cylindrical member, and is disposed on the first support member 11.
- the wire 52 is inserted into the main body 51 and is also inserted into a through hole 58 that vertically penetrates the first support member 11 and the spacer 14 (corresponding to an example of the “upper member”). Reach inside.
- the support 53 is a columnar member inserted through the main body 51 and fixes the upper end of the wire 52 at the lower end.
- the elastic member 54 is a coil spring, for example, and elastically supports the support 53 with respect to the main body 51.
- the seal member 55 seals between the main body 51 and the support 53.
- the fixing portion 56 is provided at the lower end portion of the wire 52 and is fixed to the plate 24 of the first holding portion 20. *
- the suspension mechanism 50 is configured as described above, and uses the wire 52 to suspend and hold the first holding unit 20 with a gap between the first holding unit 20 and the spacer 14.
- the joining device 6 includes a plurality of suspension mechanisms 50. *
- the suspension mechanism 50 only needs to support the first holding unit 20 while allowing the first holding unit 20 to move in the vertical direction, and is not limited to the configuration exemplified above. *
- the imaging unit 91 of the alignment mark detection unit 90 includes a first substrate W1 and a second substrate through a first support member 11, a spacer 14, a plate 24, a cooling unit 23, and a through hole 94 that penetrates the electrostatic chuck 21 up and down.
- the alignment mark provided in W2 is imaged.
- a transparent member 95 that closes the through hole 94 is provided on the upper portion of the first support member 11.
- the transparent member 95 is made of, for example, quartz glass. Such a transparent member 95 can maintain the hermeticity of the chamber 40 while ensuring the field of view of the imaging unit 91.
- the alignment mark detection unit 90 includes an elevating unit 93 that elevates and lowers the imaging unit 91.
- the elevating part 93 is provided on the upper part of the first support member 11.
- the elevating unit 93 includes a rail 931 that extends along the vertical direction, and a moving unit 932 that can move along the rail 931.
- the imaging unit 91 is attached to the moving unit 932 with the field of view directed vertically downward.
- FIG. 6 is a schematic side view showing the configuration of the horizontal position adjustment unit 60.
- FIG. 7 is a schematic bottom view showing the configuration of the horizontal position adjustment unit 60.
- the horizontal position adjustment unit 60 adjusts the position of the first holding unit 20 along the Y-axis direction (corresponding to an example of “first horizontal direction”).
- a second adjustment unit 60X that adjusts the position of the first holding unit 20 along the X-axis direction (corresponding to an example of “second horizontal direction”).
- the second adjustment unit 60X includes two moving mechanisms 60X1 and 60X2 that apply a force along the X-axis direction to the plate 24 of the first holding unit 20.
- the two moving mechanisms 60X1 and 60X2 are arranged in parallel along the Y-axis direction, the moving mechanism 60X1 is arranged on the Y-axis negative direction side with respect to the center position of the electrostatic chuck 21, and the moving mechanism 60X2 is electrostatically It is arranged on the Y axis positive direction side with respect to the center position of the chuck 21.
- the 2nd adjustment part 60X may be provided with the 3 or more movement mechanism. *
- the moving mechanism 60 ⁇ / b> X ⁇ b> 1 is connected to the drive unit 61 fixed to the first support member 11 via the fixed plate 16, the shaft 62 moved along the X-axis direction by the drive unit 61, and connected to the shaft 62.
- a first moving member 63 that moves along the X-axis direction and a first guide portion 64 that supports the first moving member 63 so as to be slidable in the X-axis direction are provided.
- An opening 43 is provided at a position facing the moving mechanism 60X1 of the chamber 40, and the first moving member 63 of the moving mechanism 60X1 is inserted through the opening 43.
- a first flange portion 44 that protrudes to the inside of the opening 43 is provided at the opening end of the opening 43 on the outer side (the moving mechanism 60X1 side).
- the moving mechanism 60 ⁇ / b> X ⁇ b> 1 has a second flange portion 65 provided in the middle portion of the first moving member 63 and a shaft portion 66 extending in the vertical direction, and a shaft portion with respect to the distal end portion of the first moving member 63.
- a second moving member 67 that is rotatably supported around the vertical axis via 66 and a second moving member 67 that is fixed to the outer peripheral portion of the lower surface of the plate 24 and supports the second moving member 67 so as to be slidable in the Y-axis direction.
- a guide unit 68 a guide unit 68. *
- the moving mechanism 60X1 includes a bellows 69 having one end connected to the first flange portion 44 and the other end connected to the second flange portion 65. With the bellows 69, the plate 24 provided inside the chamber 40 can be moved from the outside of the chamber 40 while ensuring the hermeticity of the chamber 40. *
- the moving mechanism 60X1 includes only the second flange portion 65, the shaft portion 66, the second moving member 67, and the second guide portion 68 disposed inside the chamber 40, and includes a driving portion 61, a shaft 62, The first moving member 63 and the first guide portion 64 are disposed outside the chamber 40.
- the volume of the chamber 40 can be reduced, and the intake efficiency and the heating efficiency can be improved. Further, dust generation and the like in the chamber 40 can be suppressed.
- the moving mechanism 60X1 is configured as described above, and by moving the shaft 62 along the X-axis direction by the drive unit 61, the first moving member 63 connected to the shaft 62 is moved along the X-axis direction.
- the second moving member 67 pivotally supported by the first moving member 63 is moved along the X-axis direction. Thereby, a force along the X-axis direction can be applied to the plate 24.
- description here is abbreviate
- the second adjusting unit 60X moves the first holding unit 20 along the X-axis direction by moving the second moving member 67 of the moving mechanism 60X1 and the second moving member 67 of the moving mechanism 60X2 by the same distance. Can do. *
- the horizontal position adjustment unit 60 includes a driven mechanism 60D.
- the driven mechanism 60D has the same configuration as the moving mechanisms 60X1 and 60X2 and the first adjusting unit 60Y except that the driven unit 61 and the shaft 62 are not provided.
- the second moving member 67 and the first moving member 63 are moved in accordance with the movement of the plate 24.
- the horizontal position adjustment unit 60 does not necessarily need to include the driven mechanism 60D. *
- the first adjustment unit 60Y has the same configuration as the movement mechanism 60X1.
- the first adjusting unit 60Y is arranged in a direction in which the shaft 62 and the first moving member 63 extend along the Y-axis direction, and the drive unit 61 moves the shaft 62 along the Y-axis direction.
- the first moving member 63 connected to the shaft 62 is moved along the Y-axis direction, and the second moving member 67 supported by the first moving member 63 is moved along the Y-axis direction. Thereby, the plate 24 is moved along the Y-axis direction.
- the first adjustment unit 60Y is arranged at a position where the axis of the shaft 62 and the first moving member 63 passes through the center of the plate 24 (center of the electrostatic chuck 21) is shown.
- the first adjusting unit 60Y may be disposed at a position where the axes of the shaft 62 and the first moving member 63 are shifted from the center of the plate 24 (center of the electrostatic chuck 21).
- the horizontal position adjusting unit 60 can rotate the first holding unit 20 around the vertical axis using the two moving mechanisms 60X1 and 60X2 and the first adjusting unit 60Y provided in the second adjusting unit 60X. it can. That is, the horizontal position adjustment unit 60 moves the second movement member 67 included in the movement mechanism 60X1 and the second movement member 67 included in the movement mechanism 60X2 in the X-axis direction with different movement amounts, and also includes the first adjustment unit 60Y. The first moving member 63 is moved along the Y-axis direction. *
- the horizontal position adjustment unit 60 can rotate the first holding unit 20 around the vertical axis without changing the center position of the first holding unit 20. Then, as the first holding unit 20 rotates around the vertical axis, the orientation of the first substrate W1 held by the first holding unit 20 in the horizontal direction is changed.
- FIG. 8 is a diagram illustrating a configuration of the second holding unit 30 and its periphery.
- the second holding unit 30 includes an electrostatic chuck 31, a heating unit 32, a cooling unit 33, and a plate 34.
- the plate 34 is provided so as to be able to contact and separate from the upper surface of the second support member 12.
- the cooling unit 33 is attached to the upper surface of the plate 34, and the electrostatic chuck 31 is attached to the upper surface of the cooling unit 33.
- the heating unit 32 is built in the electrostatic chuck 31. *
- the electrostatic chuck 31 includes an internal electrode and a dielectric (both not shown), and uses the electrostatic force generated by applying a voltage to the internal electrode to attract the second substrate W2 to the attracting surface.
- the heating unit 32 is, for example, a sheathed heater or a ceramic heater, and heats the electrostatic chuck 31 to heat the second substrate W2 held by the electrostatic chuck 31.
- the cooling unit 33 has the same configuration as the cooling unit 23 shown in FIG. *
- the light source 92 of the alignment mark detection unit 90 is fixed to the second support member 12 via a fixing unit (not shown) with the optical axis directed vertically upward.
- the light source 92 irradiates the first substrate W1 and the second substrate W2 with light through the second support member 12, the plate 34, the cooling unit 33, and the through hole 96 penetrating the electrostatic chuck 31 vertically.
- a transparent member 97 that closes the through hole 96 is provided below the second support member 12.
- the transparent member 97 is made of, for example, quartz glass. Such a transparent member 97 can maintain the hermeticity of the chamber 40 without obstructing the optical path of the light source 92.
- FIG. 9 is a diagram illustrating the configuration of the pressurizing unit 70 and the horizontality adjusting unit 80.
- the fixed shaft 71 of the pressure unit 70 has an upper end connected to the center of the lower surface of the plate 34.
- the fixed shaft 71 passes through the second support member 12, and a lower end portion thereof is located below the second support member 12.
- a flange portion 74 is provided at the lower end portion of the fixed shaft 71.
- the pressurizing unit 70 includes a bellows 75 that covers the outer periphery of the fixed shaft 71.
- the bellows 75 has one end connected to the lower portion of the second support member 12 and the other end connected to the flange portion 74. With the bellows 75, the plate 34 provided inside the chamber 40 can be moved from the outside of the chamber 40 while ensuring the hermeticity of the chamber 40.
- the movable shaft 72 of the pressure unit 70 has a contact portion 721 that contacts the lower end surface of the fixed shaft 71.
- the configuration of the contact portion 721 will be described with reference to FIG.
- FIG. 10 is a diagram illustrating a configuration of the contact portion 721.
- the contact surface of the contact portion 721 with the fixed shaft 71 is a convex curved surface.
- the contact surface of the fixed shaft 71 with the contact portion 721 is a concave curved surface.
- FIG. 11 is a diagram illustrating a configuration of the contact portion 721 according to the modification. *
- the movable shaft 72 may include an elastic member 722 such as rubber on the contact surface of the contact portion 721 with the fixed shaft 71.
- each contact surface of the contact portion 721 and the fixed shaft 71 is a flat surface.
- the fixed shaft 71 can be stably pressed.
- the elastic member 722 may be provided on a contact surface with the contact portion 721 of the fixed shaft 71.
- the pressurizing unit 70 is configured as described above, and the second holding unit connected to the fixed shaft 71 by moving the movable shaft 72 vertically upward using the driving unit 73 to abut against the fixed shaft 71.
- the part 30 is moved closer to the first holding unit 20, and the second substrate W ⁇ b> 2 held by the second holding unit 30 is pressed against the first substrate W ⁇ b> 1 held by the first holding unit 20.
- the second strut member 84 of the levelness adjusting unit 80 has an upper end connected to the outer peripheral side of the second holding unit 30 rather than the pressurizing unit 70.
- the second support member 84 passes through the second support member 12, and its lower end is connected to the support plate 81.
- the levelness adjusting unit 80 includes a bellows 85 that covers the outer periphery of the second support member 84.
- the bellows 85 has one end connected to the lower part of the second support member 12 and the other end connected to the upper part of the support plate 81. With the bellows 85, the plate 34 provided inside the chamber 40 can be moved from the outside of the chamber 40 while ensuring the sealing property of the chamber 40.
- a load cell 86 is provided on the second support member 84.
- the load cell 86 is a pressure detection unit that detects a pressing force applied to the first substrate W1 and the second substrate W2 when the first substrate W1 and the second substrate W2 are pressed using the horizontality adjustment unit 80. The detection result of the load cell 86 is output to the control device 200.
- FIG. 12 is a view of the horizontality adjusting unit 80 as viewed from above.
- the support plate 81 of the level adjuster 80 is a flat plate having a substantially triangular shape in plan view.
- the levelness adjusting unit 80 includes three first support members 82, three drive units 83, and three second support members 84. *
- the three first support members 82 are connected to the apex portions of the support plate 81.
- the three drive parts 83 are each connected to the other end side of the first support member 82.
- the three second support members 84 are provided corresponding to each of the three first support members 82, and are connected to the inner peripheral side of the support plate 81 with respect to the corresponding first support members 82. *
- the level adjustment unit 80 is configured as described above, and the three first support members 82 are individually moved along the vertical direction by using the three driving units 83, whereby the second holding unit 30. Adjust the level. *
- FIG. 13 is a diagram illustrating a configuration of the alignment mark detection unit 90.
- FIG. 14 is a diagram illustrating an example of the alignment mark M1 provided on the first substrate W1
- FIG. 15 is a diagram illustrating an example of the alignment mark M2 provided on the second substrate W2.
- alignment marks M1 and M2 are formed in advance on the first substrate W1 and the second substrate W2.
- the alignment mark M1 has a cross shape.
- the alignment mark M2 has a shape obtained by hollowing out the inside of a quadrangle into a cross.
- the horizontal position of the first holding unit 20 is adjusted using the horizontal position adjusting unit 60, thereby matching the cross shape of the alignment mark M1 and the cross shape of the alignment mark M2.
- the light source 92 of the alignment mark detection unit 90 irradiates light from below the second holding unit 30 vertically upward.
- the light emitted from the light source 92 reaches the imaging unit 91 through the transparent member 97, the through hole 96, the second substrate W 2, the first substrate W 1, the through hole 94 and the transparent member 95.
- the imaging unit 91 of the alignment mark detection unit 90 images the alignment marks M1 and M2 via the transparent member 95 and the through hole 94.
- the alignment mark M2 is imaged through the alignment mark M1.
- Alignment marks M1 and M2 are formed at at least two locations on one end and the other end of first substrate W1 and second substrate W2.
- the bonding apparatus 6 includes one alignment mark detection unit 90 on each of one end side and the other end side of the first substrate W1 and the second substrate W2.
- FIG. 16 is a diagram illustrating the rated operating temperature range of the electrostatic chucks 521, 531, 21, and 31. *
- the first substrate W1 and the second substrate W2 are heated from room temperature to the first temperature in the heat treatment apparatus 5, and then the first substrate W1 and the second substrate W2 are bonded in the bonding apparatus 6. After raising the temperature to a second temperature higher than the first temperature, the first substrate W1 and the second substrate W2 are bonded.
- the second temperature is, for example, a temperature at which the metal on the first substrate W1 and the metal on the second substrate W2 can be joined.
- the second temperature is, for example, 300 to 400 ° C.
- the first temperature is, for example, 150 to 250 ° C. *
- the bonding system 100 two types of electrostatic chucks (electrostatic chucks 521, 531 and electrostatic chucks 21, 31) having different rated operating temperature ranges are used as the heat treatment apparatus 5 and the bonding apparatus 6, respectively.
- the first substrate W1 and the second substrate W2 are heated stepwise by the heat treatment apparatus 5 and the bonding apparatus 6.
- the first substrate W1 and the second substrate W2 can be heated from room temperature to 300 to 400 ° C. while appropriately holding the first substrate W1 and the second substrate W2 by the electrostatic chuck.
- throughput of a series of substrate processes can be improved.
- FIG. 16 shows the rated operating temperature range R1 of the electrostatic chucks 521 and 531 provided in the heat treatment apparatus 5 and the rated operating temperature range R2 of the electrostatic chucks 21 and 31 provided in the bonding apparatus 6.
- the rated operating temperature range is a temperature range in which the electrostatic chuck can be operated properly, that is, a temperature range determined as a temperature range in which a leakage current, a decrease in adsorption force, or the like does not occur.
- the electrostatic chucks 521 and 531 of the heat treatment apparatus 5 As shown in FIG. 16, in the joining system 100 according to the present embodiment, as the electrostatic chucks 521 and 531 of the heat treatment apparatus 5, the one whose upper limit of the rated operating temperature range R1 is lower than the first temperature is used.
- the upper limit of the rated operating temperature range R1 is, for example, 200 ° C.
- the electrostatic chucks 21 and 31 of the bonding apparatus 6 that have a lower limit of the rated operating temperature range R2 higher than the first temperature are used.
- the lower limit of the rated operating temperature range R2 is, for example, 270 ° C. *
- the rated operating temperature range R1 of the electrostatic chucks 521 and 531 and the rated operating temperature range R2 of the electrostatic chucks 21 and 31 are separated from each other without overlapping.
- a first temperature exists between the rated operating temperature range R1 and the rated operating temperature range R2.
- the joining system 100 can prevent an increase in manufacturing cost and a decrease in throughput by being configured as described above.
- the first substrate W1 and the second substrate W2 are heated from room temperature in the heat treatment apparatus 5.
- the present invention is not limited to this.
- the heat treatment apparatus 5 preheated to the first temperature.
- a process of heating the first substrate W1 and the second substrate W2 to a first temperature is also conceivable.
- the configuration of the electrostatic chucks 521, 531, 21 and 31 in such a case will be described with reference to FIG.
- FIG. 17 is a diagram showing the rated operating temperature range of the electrostatic chucks 521, 531, 21, 31 according to a modification. *
- the electrostatic chucks 521 and 531 of the heat treatment apparatus 5 have a lower limit that is higher than normal temperature and an upper limit that is within the rated operating temperature range.
- An electrostatic chuck having a rated operating temperature range R3 higher than the lower limit of R2 can be used.
- FIG. 18 is a flowchart showing a series of processing procedures executed in the joining system 100.
- the first transfer device 103 of the carry-in / out station 1 takes out the first substrate W ⁇ b> 1 from the cassette C ⁇ b> 1 mounted on the cassette mounting plate 101 and transfers it to the aligner 2. To do.
- the first substrate W1 is transported with the non-joint surface facing downward.
- the plate surface on the side where the electronic circuit is formed is a bonding surface, and the surface opposite to the bonding surface is a non-bonding surface.
- the first substrate W1 transferred to the aligner 2 is subjected to pre-alignment processing by the aligner 2 (step S101).
- the aligner 2 detects the position of the orientation flat or notch formed on the first substrate W1, and performs a process of matching the detected orientation flat or notch position to a predetermined position.
- the aligner 2 performs a reversing process for reversing the front and back of the first substrate W1 (step S102).
- the first substrate W1 is in a state where the non-bonding surface faces upward.
- the first substrate W ⁇ b> 1 is transferred from the aligner 2 to the load lock chamber 3 by the first transfer device 103, and transferred from the load lock chamber 3 to the heat treatment device 5 by the second transfer device 104 of the transfer chamber 4.
- the first substrate W1 is attracted and held by the electrostatic chuck 521 provided in the first holding unit 502 of the heat treatment apparatus 5 with the bonding surface facing downward.
- step S103 the same process as the pre-alignment process described above is also performed on the second substrate W2 (step S103). That is, the first transport device 103 takes out the second substrate W2 from the cassette C2 placed on the cassette placement plate 101 and transports it to the aligner 2. At this time, the second substrate W2 is transported with the non-joint surface facing downward. The second substrate W ⁇ b> 2 transferred to the aligner 2 is subjected to pre-alignment processing by the aligner 2. *
- the second substrate W2 is transferred from the aligner 2 to the load lock chamber 3 by the first transfer device 103, and is transferred from the load lock chamber 3 to the heat treatment device 5 by the second transfer device 104.
- the second substrate W2 is attracted and held by the electrostatic chuck 531 provided in the second holding unit 503 of the heat treatment apparatus 5 with the bonding surface facing upward. Note that the order of steps S101 to S103 is not necessarily the order. *
- a pre-heat treatment for heating the first substrate W1 and the second substrate W2 in advance is performed prior to the bonding process (step S104).
- the pre-heat treatment the first substrate W1 and the second substrate W2 are heated from room temperature to the first temperature using the heating units 522 and 532 provided in the first holding unit 502 and the second holding unit 503, respectively.
- the temperature rising rate in the pre-heat treatment is, for example, 10 ° C./min.
- the load lock chamber 3, the transfer chamber 4, and the heat treatment apparatus 5 are maintained at a medium vacuum of about 10 to 20 Pa. *
- gas processing is performed in the heat treatment apparatus 5 (step S105).
- formic acid gas is supplied from the processing gas supply source 516 into the chamber 501.
- the oxide film on the surface of the metal provided on each of the first substrate W1 and the second substrate W2 is removed.
- the first substrate W1 and the second substrate W2 are taken out from the heat treatment apparatus 5 by the second transfer apparatus 104, and the first holding part 20 of the bonding apparatus 6 is placed with the bonding surface facing downward.
- the second substrate W2 is held by the second holding unit 30 of the bonding apparatus 6 with the bonding surface facing upward.
- the inside of the chamber 40 of the bonding apparatus 6 is maintained at a medium vacuum of about 10 to 20 Pa, similarly to the load lock chamber 3, the transfer chamber 4, and the heat treatment apparatus 5. For this reason, until the first substrate W1 and the second substrate W2 after the gas treatment are bonded in the bonding apparatus 6, an oxide film is formed on the surface of the metal provided on each of the first substrate W1 and the second substrate W2. It can be prevented from being formed.
- the gas treatment is performed, for example, at 200 to 250 ° C. in the pre-heat treatment shown in step S104. *
- joining processing is performed (step S106).
- the bonding apparatus 6 performs a process of bonding the first substrate W1 and the second substrate W2. A specific processing procedure of the joining process will be described later. *
- step S107 an unloading process is performed (step S107).
- the second transfer device 104 in the transfer chamber 4 takes out the superposed substrate T from the bonding device 6 and places it on the delivery section of the load lock chamber 3.
- substrate T mounted in the delivery part is cooled from 200 degreeC to room temperature by the delivery part (cooling plate).
- the first transfer device 103 of the loading / unloading station 1 takes out the superposed substrate T from the load lock chamber 3 and stores it in the cassette C3 mounted on the set mounting plate 101.
- the superposed substrate T is brought to room temperature at the delivery portion of the load lock chamber 3. It was decided to cool. Therefore, compared with the case where the temperature of the superposition
- FIG. 19 is a flowchart illustrating the processing procedure of the joining process.
- 20 to 22 are diagrams illustrating an operation example of the horizontality adjustment processing.
- 23 to 25 are diagrams illustrating an operation example of the horizontal position adjustment process.
- FIG. 26 is a diagram illustrating an operation example of the temporary pressurizing process.
- FIG. 27 is a diagram illustrating an operation example of the pressurizing process. 20 to 22, 26 and 27, the alignment mark detection unit 90 is omitted. *
- the bonding apparatus 6 is held by the first substrate W ⁇ b> 1 and the second holding unit 30 held by the first holding unit 20 using the heating units 22 and 32 (see FIGS. 4 and 8).
- the temperature rise of the second substrate W2 thus started is started (step S201).
- maintenance part 30 are the states heated previously by the heating parts 22 and 32 to 1st temperature
- the joining apparatus 6 is 1st holding
- the temperature of the first holding unit 20 and the second holding unit 30 is increased from the first temperature to the second temperature. *
- the joining device 6 decompresses the inside of the chamber 40 by using the intake device 42 (step S202).
- the inside of the chamber 40 is set to a pressure lower than that of the load lock chamber 3, the transfer chamber 4, and the heat treatment apparatus 5, in other words, a high degree of vacuum.
- the load lock chamber 3, the transfer chamber 4, and the heat treatment apparatus 5 are set to a medium vacuum of about 10 to 20 Pa, whereas the inside of the chamber 40 of the bonding apparatus 6 is 0.005 Pa or less. Set to high vacuum.
- the bonding apparatus 6 performs a leveling adjustment process for adjusting the leveling of the second holding unit 30 before the temperatures of the first substrate W1 and the second substrate W2 reach the second temperature (step S203).
- the joining device 6 raises the second holding unit 30 by using the three driving units 83 (see FIG. 12) of the leveling adjustment unit 80 as shown in FIG.
- the second substrate W2 held by the holding unit 30 is brought into contact with the first substrate W1 held by the first holding unit 20.
- the detection result of each load cell 86 at this time is output to the control device 200.
- the bonding apparatus 6 lowers the second holding unit 30 using the three driving units 83 of the horizontality adjusting unit 80. Further, the control device 200 determines the driving amount of each driving unit 83, that is, the moving amount of each second support member 84, according to the detection result of the load cell 86 described above. And the joining apparatus 6 drives the drive part 83 separately according to the drive amount determined by the control apparatus 200, and adjusts the level of the 2nd holding
- the joining device 6 drives only the left drive unit 83 to raise only the left second support member 84 and raises the left side of the second holding unit 30. Thereby, the 2nd holding
- the horizontality of the second holding unit 30 is adjusted using the horizontality adjusting unit 80, so that the first holding unit 20 of the second holding unit 30 can be adjusted. Therefore, the first substrate W1 and the second substrate W2 can be bonded with high accuracy.
- the bonding system 100 according to the present embodiment before the temperatures of the first substrate W1 and the second substrate W2 reach the second temperature, that is, the metal on the first substrate W1 and the metal on the second substrate W2. Before reaching the temperature at which the bonding can be performed, the horizontality adjustment processing for adjusting the horizontality of the second holding unit 30 is performed. Thereby, it is possible to prevent the first substrate W1 and the second substrate W2 from being joined when the second substrate W2 is once brought into contact with the first substrate W1 in the leveling adjustment process. *
- the joining device 6 performs a horizontal position adjustment process for adjusting the horizontal position of the first holding unit 20 (step S204).
- the bonding apparatus 6 moves the imaging unit 91 using the elevating unit 93 of the alignment mark detection unit 90, and only the first substrate W ⁇ b> 1 out of the first substrate W ⁇ b> 1 and the second substrate W ⁇ b> 2. Is positioned within the depth of field D of the imaging unit 91. In this state, the bonding apparatus 6 images the alignment marks M1 and M2 provided on the first substrate W1 and the second substrate W2. As a result, an image in which the alignment mark M1 is in focus and the alignment mark M2 is not in focus is obtained. The image data of this image is output to the control device 200. The control device 200 detects the alignment mark M1 by performing edge detection on the acquired image data. *
- the bonding apparatus 6 moves the imaging unit 91 using the elevating unit 93 of the alignment mark detection unit 90, so that the second substrate W ⁇ b> 2 out of the first substrate W ⁇ b> 1 and the second substrate W ⁇ b> 2. Only within the depth of field D of the imaging unit 91.
- the bonding apparatus 6 images the alignment marks M1 and M2 provided on the first substrate W1 and the second substrate W2. As a result, an image in which the alignment mark M2 is in focus and the alignment mark M1 is not in focus is obtained.
- the image data of this image is output to the control device 200.
- the control device 200 detects the alignment mark M2 by performing edge detection on the acquired image data.
- control apparatus 200 makes the horizontal position adjustment part 60 perform the adjustment process which adjusts the position and direction in the horizontal direction of the 1st holding
- the horizontal position adjustment unit 60 uses the first adjustment unit 60Y and the second adjustment unit 60X to move the first holding unit 20 in the horizontal direction or rotate it around the vertical axis. As a result, the misalignment between the first substrate W1 and the second substrate W2 caused mainly by the transport error by the first transport device 103 or the second transport device 104 is eliminated (first adjustment process). *
- the bonding system 100 only the first substrate W1 of the first substrate W1 and the second substrate W2 is positioned within the depth of field D and only the second substrate W2.
- the imaging unit 91 is caused to execute imaging processing for imaging the alignment marks M1 and M2 in each of the states positioned within the depth of field D.
- the horizontal position adjustment unit 60 is caused to perform adjustment processing for adjusting the position of the first holding unit 20 in the horizontal direction based on the imaging result of the imaging unit 91.
- the lifting / lowering unit 93 of the alignment mark detection unit 90 is controlled to raise or lower the imaging unit 91, whereby the first substrate W1 is moved to the depth of field D. And the state where the second substrate W2 is positioned within the depth of field D are switched. Accordingly, for example, the first substrate W1 is moved within the depth of field D by moving the first holding unit 20 and the second holding unit 30, and the second substrate W2 is moved within the depth of field D.
- the first holding unit 20 and the second holding unit 30 are adjusted, it is possible to maintain the horizontal position and level after the adjustment, as compared with the case where the first holding unit 20 and the second holding unit 30 are switched.
- the imaging unit 91 that images the alignment marks M1 and M2 provided on one end side of the first substrate W1 and the second substrate W2, and the first substrate W1 and the second substrate W2. And an imaging unit 91 that images the alignment marks M1 and M2 provided on the other end side (see FIG. 4).
- the joining system 100 which concerns on this embodiment, by performing the adjustment process mentioned above based on the imaging result of these two imaging parts 91, especially the direction in the horizontal direction of the 1st holding
- the bonding apparatus 6 raises the second holding unit 30 using the level adjustment unit 80 to bring the second substrate W ⁇ b> 2 close to the first substrate W ⁇ b> 1.
- the joining apparatus 6 performs the adjustment process again using the image data used for the first adjustment process (second adjustment process).
- the horizontality adjustment is performed after the imaging process and the adjustment process are performed in a state where the second holding unit 30 is located at the first position away from the first holding unit 20.
- the part 80 is controlled to move the second holding unit 30 to the second position closer to the first holding unit 20 than the first position, and then the second holding unit 30 is located at the second position.
- the adjustment process is executed again.
- the second holding unit 30 is misaligned when the second substrate W2 is brought closer to the first substrate W1 after the first adjustment processing, the misalignment is eliminated by the second adjustment processing thereafter. be able to.
- by performing the adjustment process in a state where the first substrate W1 and the second substrate W2 are as close as possible it is possible to reduce as much as possible the positional deviation associated with the subsequent raising of the second holding unit 30. Can do. *
- the joining device 6 continues to image the alignment marks M1 and M2 using the imaging unit 91 even after the horizontal position adjustment process, so that the first pressurization process (step S205) and the main pressurization process (step S206) in the subsequent stage are performed.
- the presence / absence of positional deviation between the first substrate W1 and the second substrate W2 can be monitored.
- the control device 200 performs the temporary pressurizing process or the main pressurizing process when it is determined that the deviation amount between the alignment mark M1 and the alignment mark M2 exceeds the threshold value. It may be canceled or an alarm may be output to notify the worker. *
- the bonding apparatus 6 performs a temporary pressurizing process (step S205). Specifically, as illustrated in FIG. 26, the bonding apparatus 6 raises the second holding unit 30 by using the horizontality adjusting unit 80 to bring the second substrate W2 into contact with the first substrate W1 and the second substrate W1. The substrate W2 is pressed against the first substrate W1 with a first pressing force.
- the first pressing force is, for example, 12 kN. *
- the bonding apparatus 6 performs the main pressurizing process (Step S206). Specifically, as illustrated in FIG. 27, the bonding apparatus 6 uses the pressurizing unit 70 to press the second substrate W2 against the first substrate W1 with the second pressing force.
- the second pressing force is, for example, 40 to 60 kN. Thereby, the 1st substrate W1 and the 2nd substrate W2 are joined, and superposition substrate T is formed.
- the pressurizing unit 70 is used in a state where the second substrate W2 is pressed against the first substrate W1 by the first pressing force using the horizontality adjusting unit 80.
- the second substrate W2 is pressed against the first substrate W1 with a second pressing force larger than the first pressing force. Therefore, the position shift of the 1st substrate W1 and the 2nd substrate W2 at the time of this pressurization processing is prevented. Therefore, according to the joining system 100 according to the present embodiment, the joining accuracy can be improved.
- the first holding unit 20 is held in a state of being suspended by the suspension mechanism 50 (see FIG. 4). Therefore, when a pressing force is applied to the first holding unit 20 in the temporary pressurizing process and the main pressurizing process, the first holding unit 20 moves upward and comes into contact with the spacer 14 immediately above. As a result, the pressing force applied to the first holding unit 20 is transmitted to the spacer 14 and the first support member 11 directly above. On the other hand, the suspension mechanism 50 causes the wire 52 to be loosened when the first holding unit 20 is raised. Therefore, the pressing force applied to the first holding unit 20 is not transmitted to the suspension mechanism 50. *
- the bonding apparatus 6 lowers the temperature of the superposed substrate T at a predetermined temperature decrease rate (step S207). Then, the joining device 6 lowers the movable shaft 72 of the pressurizing unit 70 after the temperature of the superposed substrate T is lowered to a predetermined temperature (for example, 200 ° C.), and uses the horizontality adjusting unit 80 to perform the second holding unit. 30 is lowered to complete the joining process.
- a predetermined temperature for example, 200 ° C.
- the bonding system 100 includes the heat treatment apparatus 5 and the bonding apparatus 6.
- the heat treatment apparatus 5 includes a first substrate that holds the first substrate W1 by electrostatic attraction force.
- Holding unit 502, second holding unit 503 that holds second substrate W2 by electrostatic attraction force, heating units 522 and 532 ("first heating unit” that heats first substrate W1 and second substrate W2 to a first temperature Is equivalent to an example).
- the bonding apparatus 6 includes a first holding unit 20 (corresponding to an example of a “third holding unit”) that holds the first substrate W1 by electrostatic adsorption force, and a second holding that holds the second substrate W2 by electrostatic adsorption force.
- Unit 30 (corresponding to an example of a “fourth holding unit”), heating units 22 and 32 (“second heating unit”) that heat the first substrate W1 and the second substrate W2 to a second temperature higher than the first temperature.
- the pressure unit 70 presses the first substrate W1 and the second substrate W2 by relatively bringing the first holding unit 20 and the second holding unit 30 closer to each other.
- the joining accuracy can be improved.
- the first substrate W1 and the second substrate W2 are heated and heated in the pre-heat treatment (step S104) and the bonding processing (step S106).
- the case has been described as an example.
- the method for heating the first substrate W1 and the second substrate W2 is not limited to the above example.
- the pre-heat treatment may be a process of heating the first substrate W1 and the second substrate W2 at a constant temperature.
- maintenance part 503 should just be heated to 1st temperature previously.
- the bonding process may be a process of heating the first substrate W1 and the second substrate W2 at a constant temperature. In this case, the 1st holding
- the first substrate W1 and the second substrate W2 are heated by heating the first substrate W1 and the second substrate W2 at a constant temperature. Compared with the case of heating, the time required for heating can be shortened. *
- the first substrate W1 and the second substrate W2 may be heated at a constant temperature in the pre-heat treatment, and then the first substrate W1 and the second substrate W2 may be heated and heated in the bonding process.
- the first substrate W1 and the second substrate W2 may be heated and heated in the pre-heat treatment, and then the first substrate W1 and the second substrate W2 may be heated at a constant temperature in the bonding process.
- the first substrate W1 and the second substrate W2 may be heated at a constant temperature in the pre-heat treatment, and then the first substrate W1 and the second substrate W2 may be heated at a constant temperature in the bonding process.
- one of the first substrate W1 and the second substrate W2 is positioned within the depth of field of the imaging unit 91, and the other of the first substrate W1 and the second substrate W2.
- the example in the case of performing the imaging process which images the alignment marks M1 and M2 in each of the state in which the imaging unit 91 is positioned within the depth of field has been described.
- the imaging process is not limited to the above example.
- an imaging process of imaging the alignment marks M1 and M2 in a state where both the first substrate W1 and the second substrate W2 are positioned within the depth of field of the imaging unit 91 may be performed.
- the pressurization part 70 moves the 2nd holding
- the pressurization part 70 moves the 1st holding
- the example in which the horizontal position adjusting unit 60 adjusts the horizontal position of the first holding unit 20 has been described.
- the horizontal position adjusting unit 60 determines the horizontal position of the second holding unit 30. You may adjust.
- an example in which the first holding unit 20 is disposed above the second holding unit 30 has been described.
- the first holding unit 20 is disposed below the second holding unit 30. May be.
- the imaging unit 91 is disposed above the first support member 11 and the light source 92 is disposed below the second support member 12 has been described.
- the imaging unit 91 may be disposed below the second support member 12 and disposed above the first support member 11.
- the present invention is useful when bonding substrates together.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Pressure Welding/Diffusion-Bonding (AREA)
Abstract
基板同士を接合する接合システムは、静電吸着力により第1基板を保持する第1保持部、静電吸着力により第2基板を保持する第2保持部、第1基板および第2基板を第1の温度に加熱する第1加熱部を有する熱処理装置と、静電吸着力により第1基板を保持する第3保持部、静電吸着力により第2基板を保持する第4保持部、第1基板および第2基板を第1の温度よりも高い第2の温度に加熱する第2加熱部、第3保持部および第4保持部を相対的に接近させることによって第1基板と第2基板とを押圧する加圧部を有する接合装置と、を備える。
Description
(関連出願の相互参照)
本願は、2015年1月16日に日本国に出願された特願2015-007246に基づき、優先権を主張し、その内容をここに援用する。
本願は、2015年1月16日に日本国に出願された特願2015-007246に基づき、優先権を主張し、その内容をここに援用する。
本発明は、接合システムおよび接合方法に関する。
従来、半導体ウェハやガラス基板等の基板同士を接合する接合システムが知られている(特許文献1参照)。
しかしながら、上述した従来技術には、接合精度を向上させるという点でさらなる改善の余地がある。
実施形態の一態様は、接合精度を向上させることのできる接合システムおよび接合方法を提供することを目的とする。
本発明の一態様は接合システムであり、熱処理装置と、接合装置とを備える。熱処理装置は、静電吸着力により第1基板を保持する第1保持部、静電吸着力により第2基板を保持する第2保持部、前記第1基板および前記第2基板を第1の温度に加熱する第1加熱部を有する。接合装置は、静電吸着力により第1基板を保持する第3保持部、静電吸着力により第2基板を保持する第4保持部、第1基板および第2基板を第1の温度よりも高い第2の温度に加熱する第2加熱部、第3保持部および第4保持部を相対的に接近させることによって第1基板と第2基板とを押圧する加圧部を有する。
本発明の別な態様は、接合方法であり、静電吸着力により第1基板を保持する第1保持部、静電吸着力により第2基板を保持する第2保持部、前記第1基板および前記第2基板を第1の温度に加熱する第1加熱部を有する熱処理装置を用い、前記第1基板および前記第2基板を前記第1の温度に加熱する熱処理工程と、静電吸着力により前記第1基板を保持する第3保持部、静電吸着力により前記第2基板を保持する第4保持部、前記第1基板および前記第2基板を前記第1の温度よりも高い第2の温度に加熱する第2加熱部、前記第3保持部および前記第4保持部を相対的に接近させることによって前記第1基板と前記第2基板とを押圧する加圧部を有する接合装置とを用い、前記第1基板と前記第2基板とを前記第2の温度に加熱した状態で接合する接合工程とを含む。
本発明の一態様によれば、接合精度を向上させることができる。
以下、添付図面を参照して、本願の開示する接合システムおよび接合方法の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
<1.接合システム100の構成> まず、本実施形態に係る接合システムの構成について、図1を参照して説明する。図1は、本実施形態に係る接合システムの構成を示す図である。なお、以下においては、位置関係を明確にするために、互いに直交するX軸方向、Y軸方向およびZ軸方向を規定し、Z軸正方向を鉛直上向き方向とする。
図1に示す本実施形態に係る接合システム100は、図2に示したように、第1基板W1と第2基板W2とを接合することによって重合基板Tを形成する。
図1に示すように、接合システム100は、搬入出ステーション1と、反転機構付きアライナ2(以下、単に「アライナ2」と記載する)と、ロードロック室3と、搬送室4と、熱処理装置5と、接合装置6とを備える。
搬入出ステーション1は、載置台7と、搬送領域8とを備える。載置台7は、複数(たとえば、4つ)のカセット載置板101を備える。各カセット載置板101には、複数枚(たとえば、25枚)の基板を水平状態で収容可能なカセットC1~C3がそれぞれ載置される。カセットC1は、第1基板W1を収容するカセットであり、カセットC2は、第2基板W2を収容するカセットであり、カセットC3は、重合基板Tを収容するカセットである。
搬送領域8は、載置台7のY軸正方向側に隣接して配置される。かかる搬送領域8には、X軸方向に沿って延在する搬送路102と、この搬送路102に沿って移動可能な第1搬送装置103とが設けられる。第1搬送装置103は、Y軸方向にも移動可能かつZ軸まわりに旋回可能であり、カセットC1~C3、アライナ2およびロードロック室3に対して第1基板W1、第2基板W2および重合基板Tの搬入出を行う。なお、カセット載置板101には、カセットC1~C3以外に、たとえば不具合が生じた基板を回収するためのカセット等が載置されてもよい。
アライナ2は、搬送領域8のY軸正方向側に隣接して配置される。アライナ2は、第1基板W1および第2基板W2の水平位置を調整する。たとえば、アライナ2は、第1基板W1および第2基板W2に形成されたオリフラまたはノッチの位置を検出し、検出したオリフラまたはノッチの位置を所定の位置に合わせるプリアライメント処理を行う。また、アライナ2は、第1基板W1の表裏を反転させる反転機構を有する。
ロードロック室3は、搬送領域8のY軸正方向側にゲートバルブ9aを介して隣接して配置される。ロードロック室3の内部には、第1基板W1、第2基板W2および重合基板Tを受け渡す受渡部が設けられる。受渡部は、冷却機能を備えたウェハ載置部(冷却板)であり、接合処理後の重合基板Tの温度をたとえば室温まで冷却することができる。
搬送室4は、ロードロック室3のY軸正方向側にゲートバルブ9bを介して隣接して配置される。搬送室4には、第2搬送装置104が配置される。第2搬送装置104は、水平方向に沿って伸縮可能なアーム部とZ軸まわりに旋回可能な基部とを備え、ロードロック室3、熱処理装置5および接合装置6に対して第1基板W1、第2基板W2および重合基板Tの搬入出を行う。
熱処理装置5は、搬送室4のX軸正方向側にゲートバルブ9cを介して隣接して配置される。熱処理装置5は、接合装置6による接合処理の前に、第1基板W1および第2基板W2を所定の温度に加熱する事前加熱処理を行う。熱処理装置5の構成については、後述する。
接合装置6は、搬送室4のY軸正方向側にゲートバルブ9dを介して隣接して配置される。接合装置6は、第1基板W1と第2基板W2とを接合して重合基板Tを形成する。接合装置6の構成については、後述する。
また、接合システム100は、制御装置200を備える。制御装置200は、接合システム100の動作を制御する。かかる制御装置200は、たとえばコンピュータであり、図示しない制御部と記憶部とを備える。記憶部は、たとえばRAM(Random Access Memory)、ROM(Read Only Memory)、ハードディスクといった記憶デバイスで構成されており、接合処理等の各種処理を制御するプログラムを格納する。制御装置200は、たとえばCPU(Central Processing Unit)であり、記憶部に記憶されたプログラムを読み出して実行することによって接合システム100の動作を制御する。
なお、かかるプログラムは、コンピュータによって読み取り可能な記録媒体に記録されていたものであって、その記録媒体から制御装置200の記憶部にインストールされたものであってもよい。コンピュータによって読み取り可能な記録媒体としては、たとえばハードディスク(HD)、フレキシブルディスク(FD)、コンパクトディスク(CD)、マグネットオプティカルディスク(MO)、メモリカードなどがある。
<2.熱処理装置5の構成> 次に、熱処理装置5の構成について図2を参照して説明する。図2は、熱処理装置5の構成を示す図である。
図2に示すように、熱処理装置5は、チャンバ501と、第1保持部502と、第2保持部503とを備える。
チャンバ501は、内部を密閉可能な容器であり、第1保持部502と第2保持部503とを収容する。チャンバ501は、ゲートバルブ9cによって開閉される搬入出口511と、チャンバ501内部を吸気するための吸気口512と、チャンバ501内部に処理ガスを供給するための供給口513とを備える。吸気口512には、吸気装置514が接続される。また、供給口513には、バルブ515を介して処理ガス供給源516が接続される。
チャンバ501内には、第1基板W1および第2基板W2の表面の酸化膜を除去する処理ガスが処理ガス供給源516から供給される。本実施形態では、処理ガスとしてギ酸ガスが用いられるが、処理ガスは、必ずしもギ酸であることを要しない。
第1保持部502は、静電チャック521と、加熱部522と、冷却部523とを備える。静電チャック521は、吸着面を下方に向けた状態で、冷却部523の下面に取り付けられ、冷却部523は、チャンバ501の天井面に取り付けられる。また、加熱部522は、静電チャック521に内蔵される。
静電チャック521は、内部電極(図示せず)と誘電体(図示せず)とを有し、内部電極に電圧を印加することによって発生する静電気力を用いて第1基板W1を吸着面に吸着させる。加熱部522は、たとえばシーズヒータやセラミックヒータであり、静電チャック521を加熱することにより、静電チャック521に保持された第1基板W1を加熱する。冷却部523は、たとえばクーリングジャケットと断熱材とを積層して構成される。
第2保持部503は、静電チャック531と、加熱部532と、冷却部533とを備える。静電チャック531は、吸着面を上方に向けた状態で、冷却部533の上面に取り付けられ、冷却部533は、チャンバ501の底面に取り付けられる。また、加熱部532は、静電チャック531に内蔵される。これら静電チャック531、加熱部532および冷却部533の構成は、第1保持部502が備える静電チャック521、加熱部522および冷却部523の構成と同様であるため、ここでの説明は省略する。
<3.接合装置6の構成> 次に、接合装置6の構成について図3を参照して説明する。図3は、接合装置6の構成を示す図である。
図3に示すように、接合装置6は、フレーム構造体10と、第1保持部20と、第2保持部30と、チャンバ40と、吊下機構50と、水平位置調整部60とを備える。また、接合装置6は、加圧部70と、水平度調整部80と、アライメントマーク検出部90とを備える。
チャンバ40は、内部を密閉可能な容器であり、第1保持部20および第2保持部30を収容する。チャンバ40には、チャンバ40内を吸気するための吸気口41が設けられる。吸気口41には、吸気装置42が接続される。なお、チャンバ40は、第1支持部材11、第2支持部材12および第1支持部材11と第2支持部材12との間に設けられた隔壁45によって構成される。
第1保持部20は、第1基板W1を保持する保持部であり、フレーム構造体10の第1支持部材11の下面にスペーサー14を介して設けられる。第1保持部20には、図示しない加熱部が内蔵される。
吊下機構50は、第1保持部20を上方から吊り下げた状態で保持する。かかる吊下機構50により、第1保持部20は、スペーサー14との間に隙間をあけた状態で配置される。水平位置調整部60は、第1保持部20の水平位置を調整される。水平位置とは、水平方向における位置および向きのことである。これら吊下機構50および水平位置調整部60の構成については、後述する。
第2保持部30は、第2基板W2を保持する保持部であり、フレーム構造体10の第2支持部材12の上面に対して接離可能に設けられる。また、第2保持部30は、第1保持部20の下方に対向配置される。第2保持部30には、図示しない加熱部が内蔵される。
加圧部70は、第2保持部30の中央部に接続された固定シャフト71と、固定シャフト71と同一軸線上に配置された可動シャフト72と、可動シャフト72を鉛直方向に移動させる駆動部73とを備える。かかる加圧部70は、駆動部73を用いて可動シャフト72を鉛直方向に移動させて固定シャフト71に突き当てる。これにより、第2保持部30が第1保持部20に接近して、第2保持部30に保持された第2基板W2が第1保持部20に保持された第1基板W1に押圧される。
水平度調整部80は、加圧部70よりも第2保持部30の外周側に接続される。かかる水平度調整部80は、支持板81と、支持板81に一端が接続された複数の第1支柱部材82と、第1支柱部材82の他端に接続され、第1支柱部材82を鉛直方向に沿って移動させる複数の駆動部83と、第2保持部30に一端が接続され、他端が支持板81に接続された複数の第2支柱部材84とを備える。かかる水平度調整部80は、複数の駆動部83を用いて複数の第1支柱部材82を鉛直方向に沿って個別に移動させることによって、第2保持部30の外周部の高さを合わせる。これにより、第2保持部30の水平度が調整される。なお、加圧部70および水平度調整部80の駆動部73,83は、フレーム構造体10の第3支持部材13に固定される。
アライメントマーク検出部90は、第1支持部材11の上方に設けられた撮像部91と、第2支持部材12の下方に設けられた光源92とを備える。光源92は、チャンバ40の外部に配置され、第2支持部材12および第2保持部30に形成された貫通孔を介して第1基板W1および第2基板W2に対して光を照射する。光源92から照射される光は、赤外光である。撮像部91は、チャンバ40の外部に配置され、第1支持部材11、スペーサー14および第1保持部20に形成された貫通孔を介して第1基板W1および第2基板W2に設けられたアライメントマークを撮像する。撮像部91による撮像結果は、制御装置200に出力される。
接合装置6は、上記のように構成されており、吸気装置42を用いてチャンバ40内を減圧し、第1保持部20および第2保持部30に内蔵された加熱部を用いて第1基板W1および第2基板W2を加熱する。また、接合装置6は、アライメントマーク検出部90の検出結果に基づき、水平位置調整部60を用いて第1保持部20の水平位置を調整する。また、接合装置6は、水平度調整部80を用いて第2保持部30の水平度を調整する。そして、接合装置6は、加圧部70を用いて第1基板W1と第2基板W2とを押圧して重合基板Tを形成する。なお、第1基板W1と第2基板W2とは、第1基板W1に設けられた金属と第2基板W2に設けられた金属により接合される。
<4-1.第1保持部20およびその周辺の構成> 次に、上述した接合装置6の構成について具体的に説明する。まず、第1保持部20およびその周辺の構成について図4を参照して説明する。図4は、第1保持部20およびその周辺の構成を示す図である。
図4に示すように、第1保持部20は、静電チャック21と、加熱部22と、冷却部23と、プレート24とを備える。プレート24の上面には、吊下機構50が接続される。また、プレート24の下面外周部には、水平位置調整部60が接続される。冷却部23は、プレート24よりも小径であり、プレート24の下面中央部に取り付けられる。静電チャック21は、冷却部23よりも小径であり、冷却部23の下面中央部に取り付けられる。加熱部22は、静電チャック21に内蔵される。なお、静電チャック21は、必ずしも冷却部23より小径であることを要しない。
静電チャック21は、内部電極と誘電体とを有し、内部電極に電圧を印加することによって発生する静電気力を用いて第1基板W1を吸着面に吸着させる。加熱部22は、たとえばシーズヒータやセラミックヒータであり、静電チャック21を加熱することにより、静電チャック21に保持された第1基板W1を加熱する。
冷却部23は、たとえばクーリングジャケットおよび断熱材を積層して構成される。ここで、冷却部23の構成について図5を参照して説明する。図5は、冷却部23の構成を示す図である。
図5に示すように、冷却部23は、第1クーリングジャケット231と、第2クーリングジャケット232と、断熱材233とを備える。第1クーリングジャケット231は、プレート24に隣接して設けられ、第2クーリングジャケット232は、第1保持部20に隣接して設けられ、断熱材233は、第1クーリングジャケット231と第2クーリングジャケット232との間に設けられる。
第1クーリングジャケット231は、一連の接合処理の間、常時動作する。これにより、プレート24や撮像部91等への熱影響を抑えることができる。一方、第2クーリングジャケット232は、第1基板W1と第2基板W2とを接合後、重合基板Tを冷却する間だけ動作する。これにより、重合基板Tを効率良く冷却することができる。
なお、熱処理装置5の第1保持部502および第2保持部503が備える冷却部523,533も上述した冷却部23と同様の構成であってもよい。
図4に戻り、吊下機構50は、本体部51と、ワイヤー52と、支持体53と、弾性部材54と、シール部材55と、固定部56とを備える。
本体部51は、円筒状の部材であり、第1支持部材11の上部に配置される。ワイヤー52は、本体部51の内部に挿通されるとともに、第1支持部材11およびスペーサー14(「上方部材」の一例に相当)を上下に貫通する貫通孔58にも挿通されて、チャンバ40の内部まで到達する。支持体53は、本体部51に挿通された円柱状の部材であり、下端部においてワイヤー52の上端部を固定する。弾性部材54は、たとえばコイルばねであり、本体部51に対して支持体53を弾性的に支持する。シール部材55は、本体部51と支持体53との間を密閉する。固定部56は、ワイヤー52の下端部に設けられ、第1保持部20のプレート24に固定される。
吊下機構50は、上記のように構成されており、ワイヤー52を用いて第1保持部20をスペーサー14との間に隙間をあけた状態で吊り下げて保持する。なお、接合装置6は、吊下機構50を複数備える。
なお、吊下機構50は、第1保持部20の鉛直方向への移動を許容しつつ第1保持部20を支持するものであればよく、上記で例示した構成に限定されるものではない。
アライメントマーク検出部90の撮像部91は、第1支持部材11、スペーサー14、プレート24、冷却部23および静電チャック21を上下に貫通する貫通孔94を介して第1基板W1および第2基板W2に設けられたアライメントマークを撮像する。
第1支持部材11の上部には、貫通孔94を閉塞する透明部材95が設けられる。透明部材95は、たとえば石英ガラスで形成される。かかる透明部材95により、撮像部91の視野を確保しつつチャンバ40の密閉性を保つことができる。
アライメントマーク検出部90は、撮像部91を昇降させる昇降部93を備える。昇降部93は、第1支持部材11の上部に設けられる。昇降部93は、鉛直方向に沿って延在するレール931と、レール931に沿って移動可能な移動部932とを備える。撮像部91は、鉛直下向きに視野を向けた状態で、移動部932に取り付けられる。
<4-2.水平位置調整部60の構成> 次に、水平位置調整部60の具体的な構成について図6および図7を参照して説明する。図6は、水平位置調整部60の構成を示す模式側面図である。図7は、水平位置調整部60の構成を示す模式底面図である。
図6および図7に示すように、水平位置調整部60は、第1保持部20の位置をY軸方向(「第1水平方向」の一例に相当)に沿って調整する第1調整部60Yと、第1保持部20の位置をX軸方向(「第2水平方向」の一例に相当)に沿って調整する第2調整部60Xとを備える。
第2調整部60Xは、第1保持部20のプレート24に対してX軸方向に沿った力を加える2つの移動機構60X1,60X2を備える。2つの移動機構60X1,60X2は、Y軸方向に沿って並列に配置されており、移動機構60X1は静電チャック21の中心位置よりもY軸負方向側に配置され、移動機構60X2は静電チャック21の中心位置よりもY軸正方向側に配置される。なお、ここでは、第2調整部60Xが2つの移動機構60X1,60X2を備える場合の例を示すが、第2調整部60Xは、3つ以上の移動機構を備えていてもよい。
移動機構60X1は、固定プレート16を介して第1支持部材11に固定された駆動部61と、駆動部61によりX軸方向に沿って移動するシャフト62と、シャフト62に接続され、シャフト62とともにX軸方向に沿って移動する第1移動部材63と、第1移動部材63をX軸方向に摺動可能に支持する第1ガイド部64とを備える。
チャンバ40の移動機構60X1と対向する位置には、開口部43が設けられており、移動機構60X1の第1移動部材63は、開口部43に挿通される。開口部43の外側(移動機構60X1側)の開口端には、開口部43の内側に張り出した第1フランジ部44が設けられる。
移動機構60X1は、第1移動部材63の中途部に設けられた第2フランジ部65と、鉛直方向に延在する軸部66を有し、第1移動部材63の先端部に対して軸部66を介して鉛直軸まわりに回転可能に軸支された第2移動部材67と、プレート24の下面外周部に固定され、第2移動部材67をY軸方向に摺動可能に支持する第2ガイド部68とを備える。
そして、移動機構60X1は、一端が第1フランジ部44に接続され、他端が第2フランジ部65に接続されたベローズ69を備える。かかるベローズ69により、チャンバ40の密閉性を確保しつつ、チャンバ40の外部からチャンバ40の内部に設けられたプレート24を移動させることができる。
図6に示すように、移動機構60X1は、第2フランジ部65、軸部66、第2移動部材67および第2ガイド部68のみがチャンバ40の内部に配置され、駆動部61、シャフト62、第1移動部材63および第1ガイド部64がチャンバ40の外部に配置される。かかる構成とすることにより、チャンバ40の容積を小さくすることができ、吸気効率や加熱効率を向上させることができる。また、チャンバ40内での発塵等を抑えることができる。
移動機構60X1は、上記のように構成されており、駆動部61によってシャフト62をX軸方向に沿って移動させることにより、シャフト62に接続された第1移動部材63をX軸方向に沿って移動させて、第1移動部材63に軸支された第2移動部材67をX軸方向に沿って移動させる。これにより、プレート24に対してX軸方向に沿った力を加えることができる。なお、移動機構60X2の構成は、移動機構60X1と同様であるため、ここでの説明は省略する。
第2調整部60Xは、移動機構60X1の第2移動部材67と移動機構60X2の第2移動部材67とを同じ距離だけ移動させることによって、第1保持部20をX軸方向沿って移動させることができる。
また、水平位置調整部60は、従動機構60Dを備える。従動機構60Dは、駆動部61およびシャフト62を有さない点を除き、移動機構60X1,60X2および第1調整部60Yと同様の構成を有する。かかる従動機構60Dは、プレート24の移動に伴って第2移動部材67および第1移動部材63が従動的に移動する。なお、水平位置調整部60は、必ずしも従動機構60Dを備えることを要しない。
第1調整部60Yは、移動機構60X1と同様の構成を有する。かかる第1調整部60Yは、シャフト62および第1移動部材63がY軸方向に沿って延在する向きに配置されており、駆動部61によってシャフト62をY軸方向に沿って移動させることにより、シャフト62に接続された第1移動部材63をY軸方向に沿って移動させて、第1移動部材63に軸支された第2移動部材67をY軸方向に沿って移動させる。これにより、プレート24をY軸方向に沿って移動させる。
なお、ここでは、シャフト62および第1移動部材63の軸線がプレート24の中心(静電チャック21の中心)を通る位置に第1調整部60Yが配置される場合の例を示したが、第1調整部60Yは、シャフト62および第1移動部材63の軸線がプレート24の中心(静電チャック21の中心)からずれた位置に配置されてもよい。
本実施形態に係る水平位置調整部60は、第2調整部60Xが備える2つの移動機構60X1,60X2および第1調整部60Yを用いて、第1保持部20を鉛直軸まわりに回転させることができる。すなわち、水平位置調整部60は、移動機構60X1が有する第2移動部材67と、移動機構60X2が有する第2移動部材67とを異なる移動量でX軸方向へ移動させるとともに、第1調整部60Yの第1移動部材63をY軸方向に沿って移動させる。
これにより、水平位置調整部60は、第1保持部20の中心位置を変えることなく第1保持部20を鉛直軸周りに回転させることができる。そして、第1保持部20が鉛直軸周りに回転することで、第1保持部20に保持された第1基板W1の水平方向における向きが変更される。
<4-3.第2保持部30およびその周辺の構成> 次に、第2保持部30およびその周辺の構成について図8を参照して説明する。図8は、第2保持部30およびその周辺の構成を示す図である。
図8に示すように、第2保持部30は、静電チャック31と、加熱部32と、冷却部33と、プレート34とを備える。プレート34は、第2支持部材12の上面に対して接離可能に設けられる。冷却部33は、プレート34の上面に取り付けられ、静電チャック31は、冷却部33の上面に取り付けられる。加熱部32は、静電チャック31に内蔵される。
静電チャック31は、内部電極と誘電体とを有し(いずれも図示せず)、内部電極に電圧を印加することによって発生する静電気力を用いて第2基板W2を吸着面に吸着させる。加熱部32は、たとえばシーズヒータやセラミックヒータであり、静電チャック31を加熱することにより、静電チャック31に保持された第2基板W2を加熱する。冷却部33は、図5に示す冷却部23と同様の構成を有する。
また、図8に示すように、アライメントマーク検出部90の光源92は、光軸を鉛直上方に向けた状態で、図示しない固定部を介して第2支持部材12に固定される。かかる光源92は、第2支持部材12、プレート34、冷却部33および静電チャック31を上下に貫通する貫通孔96を介して第1基板W1および第2基板W2に対して光を照射する。
第2支持部材12の下部には、貫通孔96を閉塞する透明部材97が設けられる。透明部材97は、たとえば石英ガラスで形成される。かかる透明部材97により、光源92の光路を妨げることなくチャンバ40の密閉性を保つことができる。
<4-4.加圧部70および水平度調整部80の構成> 次に、加圧部70および水平度調整部80の構成について図9を参照して説明する。図9は、加圧部70および水平度調整部80の構成を示す図である。
図9に示すように、加圧部70の固定シャフト71は、プレート34の下面中央部に上端部が接続される。固定シャフト71は、第2支持部材12を貫通しており、その下端部は、第2支持部材12の下方に位置する。固定シャフト71の下端部には、フランジ部74が設けられる。
加圧部70は、固定シャフト71の外周を覆うベローズ75を備える。ベローズ75は、第2支持部材12の下部に一端が接続され、他端がフランジ部74に接続される。かかるベローズ75により、チャンバ40の密閉性を確保しつつ、チャンバ40の外部からチャンバ40の内部に設けられたプレート34を移動させることができる。
加圧部70の可動シャフト72は、固定シャフト71の下端面に当接する当接部721を有する。ここで、当接部721の構成について図10を参照して説明する。図10は、当接部721の構成を示す図である。
図10に示すように、当接部721の固定シャフト71との当接面は、凸曲面である。一方、固定シャフト71の当接部721との当接面は、凹曲面である。かかる構成とすることにより、固定シャフト71を安定して押圧することができる。なお、当接部721の固定シャフト71との当接面が凹曲面であり、固定シャフト71の当接部721との当接面が凸曲面であってもよい。
また、当接部721の構成は、上記の例に限定されない。当接部721の変形例について図11を参照して説明する。図11は、変形例に係る当接部721の構成を示す図である。
図11に示すように、可動シャフト72は、当接部721の固定シャフト71との当接面にゴム等の弾性部材722を備えていてもよい。かかる場合、当接部721および固定シャフト71の各当接面は、平坦面とする。かかる構成によっても、固定シャフト71を安定して押圧することができる。なお、弾性部材722は、固定シャフト71の当接部721との当接面に設けられてもよい。
加圧部70は、上記のように構成されており、駆動部73を用いて可動シャフト72を鉛直上方に移動させて固定シャフト71に突き当てることにより、固定シャフト71に接続された第2保持部30を第1保持部20に接近させて、第2保持部30に保持された第2基板W2を第1保持部20に保持された第1基板W1に押圧する。
図9に戻り、水平度調整部80の構成について説明する。水平度調整部80の第2支柱部材84は、加圧部70よりも第2保持部30の外周側に上端部が接続される。また、第2支柱部材84は、第2支持部材12を貫通しており、その下端部は、支持板81に接続される。
水平度調整部80は、第2支柱部材84の外周を覆うベローズ85を備える。ベローズ85は、第2支持部材12の下部に一端が接続され、他端が支持板81の上部に接続される。かかるベローズ85により、チャンバ40の密閉性を確保しつつ、チャンバ40の外部からチャンバ40の内部に設けられたプレート34を移動させることができる。
第2支柱部材84には、ロードセル86が設けられている。ロードセル86は、水平度調整部80を用いて第1基板W1および第2基板W2を押圧した場合に第1基板W1および第2基板W2にかかる押圧力を検出する圧力検出部である。ロードセル86の検出結果は、制御装置200に出力される。
図12は、水平度調整部80を上方から見た図である。図12に示すように、水平度調整部80の支持板81は、平面視略三角形状の平板である。水平度調整部80は、3つの第1支柱部材82と、3つの駆動部83と、3つの第2支柱部材84とを備える。
3つの第1支柱部材82は、支持板81の各頂点部分に接続される。3つの駆動部83は、第1支柱部材82の他端側にそれぞれ接続される。3つの第2支柱部材84は、3つの第1支柱部材82の各々に対応して設けられており、対応する第1支柱部材82よりも支持板81の内周側に接続される。
水平度調整部80は、上記のように構成されており、3つの駆動部83を用いて3つの第1支柱部材82を鉛直方向に沿って個別に移動させることにより、第2保持部30の水平度を調整する。
<4-5.アライメントマーク検出部90の構成> 次に、アライメントマーク検出部90の構成について図13~図15を参照して説明する。図13は、アライメントマーク検出部90の構成を示す図である。また、図14は、第1基板W1に設けられるアライメントマークM1の一例を示す図であり、図15は、第2基板W2に設けられるアライメントマークM2の一例を示す図である。
図13に示すように、第1基板W1および第2基板W2には、アライメントマークM1,M2が予め形成されている。アライメントマークM1は、たとえば図14に示すように、十字形状を有する。また、アライメントマークM2は、たとえば図15に示すように、四角形の内部を十字にくり抜いた形状を有する。後述する水平位置調整処理では、水平位置調整部60を用いて第1保持部20の水平位置を調整することにより、アライメントマークM1の十字形状とアライメントマークM2の十字形状とを一致させる。
アライメントマーク検出部90の光源92は、第2保持部30の下方から鉛直上方に向けて光を照射する。光源92から照射された光は、透明部材97、貫通孔96、第2基板W2、第1基板W1、貫通孔94および透明部材95を介して撮像部91に到達する。アライメントマーク検出部90の撮像部91は、透明部材95および貫通孔94を介してアライメントマークM1,M2を撮像する。なお、アライメントマークM2は、アライメントマークM1を透過して撮像される。
アライメントマークM1,M2は、第1基板W1および第2基板W2の一端部および他端部の少なくとも2箇所に形成される。また、接合装置6は、第1基板W1および第2基板W2の一端側と他端側とにそれぞれアライメントマーク検出部90を1つずつ備える。
<5.静電チャック521,531,21,31の構成> 次に、熱処理装置5が備える静電チャック521,531および接合装置6が備える静電チャック21,31の構成について図16を参照して説明する。図16は、静電チャック521,531,21,31の定格使用温度範囲を示す図である。
本実施形態に係る接合システム100では、熱処理装置5において第1基板W1および第2基板W2を常温から第1の温度まで昇温した後、接合装置6において第1基板W1および第2基板W2を第1の温度より
も高い第2の温度まで昇温したうえで、第1基板W1および第2基板W2を接合する。
も高い第2の温度まで昇温したうえで、第1基板W1および第2基板W2を接合する。
第2の温度は、たとえば、第1基板W1上の金属と第2基板W2上の金属との接合が可能な温度である。本実施形態に係る接合システム100において、第2の温度は、たとえば300~400℃である。また、第1の温度は、たとえば150~250℃である。
ここで、室温から400℃程度までの広範な温度範囲において基板を適切に保持することのできる静電チャックは、現時点では存在しない。静電チャックが備える誘電体の体積抵抗率が温度に応じて変動するためである。
そこで、本実施形態に係る接合システム100では、定格使用温度範囲が異なる2種類の静電チャック(静電チャック521,531と静電チャック21,31)を熱処理装置5と接合装置6とにそれぞれ設け、熱処理装置5と接合装置6とで第1基板W1および第2基板W2を段階的に加熱することとした。これにより、第1基板W1および第2基板W2を静電チャックで適切に保持しつつ、室温から300~400℃まで昇温することができるため、第1基板W1および第2基板W2の高精度な接合を実現することができる。また、第1基板W1および第2基板W2の加熱処理を、熱処理装置5と接合装置6とで分担して行うようにすることで、一連の基板処理のスループットを向上させることができる。
図16には、熱処理装置5に設けられる静電チャック521,531の定格使用温度範囲R1と、接合装置6に設けられる静電チャック21,31の定格使用温度範囲R2とを示している。ここで、定格使用温度範囲とは、静電チャックを適正に動作させることが可能な温度範囲、すなわちリーク電流や吸着力の低下等が生じない温度範囲として定められた温度範囲である。
図16に示すように、本実施形態に係る接合システム100では、熱処理装置5の静電チャック521,531として、定格使用温度範囲R1の上限が第1の温度よりも低いものが用いられる。定格使用温度範囲R1の上限は、たとえば200℃である。また、本実施形態に係る接合システム100では、接合装置6の静電チャック21,31として、定格使用温度範囲R2の下限が第1の温度よりも高いものが用いられる。定格使用温度範囲R2の下限は、たとえば270℃である。
このように、本実施形態に係る接合システム100において、静電チャック521,531の定格使用温度範囲R1と静電チャック21,31の定格使用温度範囲R2とは、重複せず互いに離れており、定格使用温度範囲R1と定格使用温度範囲R2との間に第1の温度が存在する。
上述したように、常温から400℃程度までの広範な温度範囲をカバーする静電チャックは、現時点では存在しない。このため、定格使用温度範囲R1の静電チャック521,531を備える熱処理装置5の他に、第1の温度を定格使用温度範囲に含むような静電チャックを備える熱処理装置を別途設け、これら2つの熱処理装置を用いて第1基板W1および第2基板W2を常温から第1の温度まで昇温させることが考えられる。しかしながら、このようにすると、製造コストの増大やスループットの低下を招くおそれがある。これに対し、本実施形態に係る接合システム100では、上記のように構成することにより、製造コストの増大やスループットの低下を防止することができる。
なお、本実施形態では、熱処理装置5において第1基板W1および第2基板W2を常温から昇温させるものとするが、これに限らず、たとえば、第1の温度に予熱された熱処理装置5において第1基板W1および第2基板W2を第1の温度に加熱するプロセスも考えられる。かかる場合における静電チャック521,531,21,31の構成について図17を参照して説明する。図17は、変形例に係る静電チャック521,531,21,31の定格使用温度範囲を示す図である。
図17に示すように、熱処理装置5を第1の温度に予熱しておく場合、熱処理装置5の静電チャック521,531としては、下限が常温よりも高く、かつ、上限が定格使用温度範囲R2の下限よりも高い定格使用温度範囲R3を有する静電チャックを用いることができる。
<6.接合システム100の具体的動作> 次に、接合システム100の具体的動作について図18を参照して説明する。図18は、接合システム100で実行される一連の処理手順を示すフローチャートである。
図18に示すように、接合システム100では、まず、搬入出ステーション1の第1搬送装置103が、カセット載置板101に載置されたカセットC1から第1基板W1を取り出してアライナ2へ搬送する。第1基板W1は、非接合面が下方を向いた状態で搬送される。なお、第1基板W1の板面のうち、電子回路が形成される側の板面が接合面であり、かかる接合面とは反対側の面が非接合面である。
アライナ2へ搬送された第1基板W1は、アライナ2によってプリアライメント処理が施される(ステップS101)。たとえば、アライナ2では、第1基板W1に形成されたオリフラまたはノッチの位置を検出し、検出したオリフラまたはノッチの位置を所定の位置に合わせる処理が行われる。
つづいて、アライナ2は、第1基板W1の表裏を反転させる反転処理を行う(ステップS102)。これにより、第1基板W1は、非接合面が上方を向いた状態となる。その後、第1基板W1は、第1搬送装置103によってアライナ2からロードロック室3へ搬送され、搬送室4の第2搬送装置104によってロードロック室3から熱処理装置5へ搬送される。そして、第1基板W1は、接合面を下方に向けた状態で、熱処理装置5の第1保持部502が備える静電チャック521に吸着保持される。
一方、接合システム100では、上述したプリアライメント処理と同様の処理が第2基板W2に対しても行われる(ステップS103)。すなわち、第1搬送装置103は、カセット載置板101に載置されたカセットC2から第2基板W2を取り出してアライナ2へ搬送する。このとき、第2基板W2は、非接合面が下方を向いた状態で搬送される。そして、アライナ2へ搬送された第2基板W2は、アライナ2によってプリアライメント処理が施される。
その後、第2基板W2は、第1搬送装置103によってアライナ2からロードロック室3へ搬送され、第2搬送装置104によってロードロック室3から熱処理装置5へ搬送される。そして、第2基板W2は、接合面を上方に向けた状態で、熱処理装置5の第2保持部503が備える静電チャック531に吸着保持される。なお、ステップS101~S103の順番は、必ずしもこの順番であることを要しない。
つづいて、接合システム100では、接合処理に先立って第1基板W1および第2基板W2を事前に加熱する前熱処理が行われる(ステップS104)。かかる前熱処理では、第1保持部502および第2保持部503にそれぞれ設けられた加熱部522,532を用いて第1基板W1および第2基板W2を常温から第1の温度まで加熱する。前熱処理における昇温レートは、たとえば10℃/minである。なお、ロードロック室3、搬送室4および熱処理装置5は、10~20Pa程度の中真空に保たれている。
つづいて、熱処理装置5では、ガス処理が行われる(ステップS105)。かかるガス処理では、処理ガス供給源516からチャンバ501内にギ酸ガスを供給する。これにより、第1基板W1および第2基板W2上にそれぞれ設けられた金属の表面の酸化膜が除去される。その後、第1基板W1および第2基板W2は、第2搬送装置104によって熱処理装置5から取り出され、第1基板W1は、接合面を下方に向けた状態で接合装置6の第1保持部20に保持され、第2基板W2は、接合面を上方に向けた状態で接合装置6の第2保持部30に保持される。このとき、接合装置6のチャンバ40内は、ロードロック室3、搬送室4および熱処理装置5と同様、10~20Pa程度の中真空に保たれている。このため、ガス処理後の第1基板W1および第2基板W2が接合装置6において接合されるまでの間、第1基板W1および第2基板W2上にそれぞれ設けられた金属の表面に酸化膜が形成されることを防止することができる。なお、ガス処理は、ステップS104に示す前熱処理において、たとえば200~250℃で実施される。
このように、接合システム100では、ゲートバルブ9cによって熱処理装置5と搬送室4とを遮断した状態で、熱処理装置5においてガス処理を行うこととしたため、搬送室4の処理ガスによる汚染を防止することができる。
つづいて、接合システム100では、接合処理が行われる(ステップS106)。かかる接合処理では、接合装置6が、第1基板W1と第2基板W2とを接合する処理を行う。かかる接合処理の具体的な処理手順については、後述する。
つづいて、接合システム100では、搬出処理が行われる(ステップS107)。かかる搬出処理では、搬送室4の第2搬送装置104が、接合装置6から重合基板Tを取り出してロードロック室3の受渡部に載置する。受渡部に載置された重合基板Tは、受渡部(冷却板)によって200℃から室温まで冷却される。その後、搬入出ステーション1の第1搬送装置103が、ロードロック室3から重合基板Tを取り出してセット載置板101に載置されたカセットC3に収容する。これにより、一連の処理が終了する。
このように、接合システム100では、接合装置6において重合基板Tを室温よりも高い所定の温度(ここでは、200℃)まで冷却した後、ロードロック室3の受渡部において重合基板Tを室温まで冷却することとした。したがって、接合装置6において重合基板Tの温度を室温まで冷却する場合と比較して、接合装置6における処理時間(タクトタイム)を短縮することができる。
<接合処理の処理手順> 次に、ステップS106における接合処理の具体的な処理手順について図19~図27を参照して説明する。図19は、接合処理の処理手順を示すフローチャートである。図20~図22は、水平度調整処理の動作例を示す図である。図23~図25は、水平位置調整処理の動作例を示す図である。図26は、仮加圧処理の動作例を示す図である。図27は、本加圧処理の動作例を示す図である。なお、図20~図22、図26および図27では、アライメントマーク検出部90を省略して示している。
図19に示すように、接合装置6は、加熱部22,32(図4、図8参照)を用いて、第1保持部20に保持された第1基板W1および第2保持部30に保持された第2基板W2の昇温を開始する(ステップS201)。なお、第1保持部20および第2保持部30は、加熱部22,32によって予め第1の温度に加熱された状態となっており、接合装置6は、第1保持部20および第2保持部30で第1基板W1および第2基板W2を保持した後、第1保持部20および第2保持部30を第1の温度から第2の温度まで昇温する。
つづいて、接合装置6は、吸気装置42を用いてチャンバ40内を減圧する(ステップS202)。チャンバ40内は、ロードロック室3、搬送室4および熱処理装置5よりも低い圧力、言い換えれば、高い真空度に設定される。たとえば、接合システム100において、ロードロック室3、搬送室4および熱処理装置5は、10~20Pa程度の中真空に設定されるのに対し、接合装置6のチャンバ40内は、0.005Pa以下の高真空に設定される。
つづいて、接合装置6は、第1基板W1および第2基板W2の温度が第2の温度に到達する前に、第2保持部30の水平度を調整する水平度調整処理を行う(ステップS203)。
水平度調整処理において、接合装置6は、図20に示すように、水平度調整部80の3つの駆動部83(図12参照)を用いて第2保持部30を上昇させるこ
とにより、第2保持部30に保持された第2基板W2を第1保持部20に保持された第1基板W1に当接させる。このときの各ロードセル86の検出結果は、制御装置200に出力される。
とにより、第2保持部30に保持された第2基板W2を第1保持部20に保持された第1基板W1に当接させる。このときの各ロードセル86の検出結果は、制御装置200に出力される。
つづいて、図21に示すように、接合装置6は、水平度調整部80の3つの駆動部83を用いて第2保持部30を下降させる。また、制御装置200は、前述のロードセル86の検出結果に応じて各駆動部83の駆動量、すなわち、各第2支柱部材84の移動量を決定する。そして、接合装置6は、制御装置200によって決定された駆動量に応じて駆動部83を個別に駆動させて第2保持部30の水平度を調整する。
たとえば、図21に示す2つのロードセル86、86のうち、右側のロードセル86によって検出された圧力が、左側のロードセル86によって検出された圧力よりも大きいと仮定する。この場合、第2保持部30の右側が第1保持部20に対して方当たりしている、すなわち、第2保持部30の右側が上方に傾いていることが考えられる。
そこで、接合装置6は、図22に示すように、たとえば左側の駆動部83のみを駆動させて左側の第2支柱部材84のみを上昇させて、第2保持部30の左側を上昇させる。これにより、第2保持部30を水平にすることができる。なお、接合装置6は、各ロードセル86により検出される圧力の差が所定範囲内になるまで上述した水平度調整処理を繰り返してもよい。
このように、本実施形態に係る接合システム100によれば、水平度調整部80を用いて第2保持部30の水平度を調整することで、第2保持部30の第1保持部20への方当たりを防止することができるため、第1基板W1および第2基板W2の高精度な接合を実現することができる。また、本実施形態に係る接合システム100では、第1基板W1および第2基板W2の温度が第2の温度に到達する前、すなわち、第1基板W1上の金属と第2基板W2上の金属との接合が可能な温度に到達する前に、第2保持部30の水平度を調整する水平度調整処理を行うこととした。これにより、水平度調整処理において第2基板W2を第1基板W1に一旦当接させた際に、第1基板W1と第2基板W2とが接合されてしまうことを防止することができる。
つづいて、接合装置6は、第1保持部20の水平位置を調整する水平位置調整処理を行う(ステップS204)。
まず、接合装置6は、図23に示すように、アライメントマーク検出部90の昇降部93を用いて撮像部91を移動させて、第1基板W1および第2基板W2のうち第1基板W1のみを撮像部91の被写界深度D内に位置させる。この状態で、接合装置6は、第1基板W1および第2基板W2に設けられたアライメントマークM1,M2を撮像する。これにより、アライメントマークM1には焦点が合っており、アライメントマークM2には焦点が合っていない画像が得られる。この画像の画像データは制御装置200へ出力される。制御装置200は、取得した画像データに対してエッジ検出を行うことにより、アライメントマークM1を検出する。
つづいて、接合装置6は、図24に示すように、アライメントマーク検出部90の昇降部93を用いて撮像部91を移動させて、第1基板W1および第2基板W2のうち第2基板W2のみを撮像部91の被写界深度D内に位置させる。この状態で、接合装置6は、第1基板W1および第2基板W2に設けられたアライメントマークM1,M2を撮像する。これにより、アライメントマークM2には焦点が合っており、アライメントマークM1には焦点が合っていない画像が得られる。この画像の画像データは制御装置200へ出力される。制御装置200は、取得した画像データに対してエッジ検出を行うことにより、アライメントマークM2を検出する。
そして、制御装置200は、アライメントマークM1,M2の検出結果に基づき、第1保持部20の水平方向における位置および向きを調整する調整処理を水平位置調整部60に対して実行させる。具体的には、制御装置200は、アライメントマークM1の十字形状(図14参照)の位置がアライメントマークM2の十字形状(図15参照)の位置と一致するように、水平位置調整部60を制御して第1保持部20の水平方向における位置および向きを調整する。
水平位置調整部60は、第1調整部60Yおよび第2調整部60Xを用いて第1保持部20を水平方向に移動させたり、鉛直軸まわりに回転させたりする。これにより、主に、第1搬送装置103や第2搬送装置104による搬送誤差に起因する第1基板W1および第2基板W2の位置ずれが解消される(第1調整処理)。
このように、本実施形態に係る接合システム100では、第1基板W1および第2基板W2のうち第1基板W1のみを被写界深度D内に位置させた状態と、第2基板W2のみを被写界深度D内に位置させた状態との各々においてアライメントマークM1,M2を撮像する撮像処理を撮像部91に対して実行させる。そして、本実施形態に係る接合システム100では、撮像部91の撮像結果に基づいて第1保持部20の水平方向における位置を調整する調整処理を水平位置調整部60に対して実行させる。
これにより、アライメントマークM1にのみ焦点が合った画像とアライメントマークM2にのみ焦点が合った画像とをそれぞれ得ることができ、これらの画像を用いてアライメントマークM1,M2を適切に検出することができる。言い換えれば、アライメントマークM1,M2の両方に焦点が合った画像を用いることによってアライメントマークM1,M2を誤検出することを防止することができる。
また、本実施形態に係る接合システム100では、撮像処理において、アライメントマーク検出部90の昇降部93を制御して撮像部91を上昇または下降させることによって、第1基板W1を被写界深度D内に位置させた状態と、第2基板W2を被写界深度D内に位置させた状態とを切り替えることとした。これにより、たとえば第1保持部20や第2保持部30を移動させることによって第1基板W1を被写界深度D内に位置させた状態と、第2基板W2を被写界深度D内に位置させた状態とを切り替えるように構成した場合と比較して、第1保持部20および第2保持部30の調整後の水平位置や水平度を維持することができる。
また、本実施形態に係る接合システム100では、第1基板W1および第2基板W2の一端側に設けられたアライメントマークM1,M2を撮像する撮像部91と、第1基板W1および第2基板W2の他端側に設けられたアライメントマークM1,M2を撮像する撮像部91とを備える(図4参照)。そして、本実施形態に係る接合システム100では、これら2つの撮像部91の撮像結果に基づいて上述した調整処理を行うことにより、特に、第1保持部20の水平方向における向きを精度良く調整することができる。
その後、接合装置6は、図25に示すように、水平度調整部80を用いて第2保持部30を上昇させて、第2基板W2を第1基板W1に接触しない程度に近接させる。この状態で、接合装置6は、第1調整処理に使用した画像データを用いて調整処理を再度実行する(第2調整処理)。
このように、本実施形態に係る接合システム100では、第2保持部30が第1保持部20から離れた第1の位置に位置した状態で撮像処理および調整処理を実行した後、水平度調整部80を制御して、第2保持部30を第1の位置よりも第1保持部20に近い第2の位置まで移動させ、その後、第2保持部30が第2の位置に位置した状態で調整処理を再度実行することとした。これにより、第1調整処理後、第2基板W2を第1基板W1に接近させる際に第2保持部30の位置ずれが生じたとしても、その後、第2調整処理によってかかる位置ずれを解消することができる。言い換えれば、第1基板W1と第2基板W2とを可能な限り近接させた状態で調整処理を行うことで、その後の第2保持部30の上昇に伴う位置ずれを可及的に低減することができる。
また、本実施形態に係る接合システム100では、第1保持部20と直上のスペーサー14との間に隙間が設けられている(図4参照)。このため、水平位置調整処理によって第1保持部20が移動したとしても、第1保持部20とスペーサー14との間で摩擦が生じることがない。したがって、第1保持部20とスペーサー14との摩擦によるゴミの発生等を防止することができる。
なお、ここでは、第2基板W2を第2の位置に移動させた後に、第2調整処理を行う場合の例を示したが、接合装置6は、第2保持部30を第2の位置へ向けて上昇させながら、第2調整処理を連続的に行ってもよい。
接合装置6は、水平位置調整処理後も撮像部91を用いてアライメントマークM1,M2を撮像し続けることで、後段の仮加圧処理(ステップS205)および本加圧処理(ステップS206)における第1基板W1および第2基板W2の位置ずれの有無を監視することができる。なお、制御装置200は、仮加圧処理および本加圧処理において、アライメントマークM1とアライメントマークM2とのずれ量が閾値を超えたと判定した場合には、仮加圧処理または本加圧処理を中止したり、アラームを出力して作業者に報知したりしてもよい。
つづいて、接合装置6は、仮加圧処理を行う(ステップS205)。具体的には、図26に示すように、接合装置6は、水平度調整部80を用いて第2保持部30を上昇させて第2基板W2を第1基板W1に接触させるとともに、第2基板W2を第1基板W1に第1の押圧力で押圧する。第1の押圧力は、たとえば12kNである。
つづいて、接合装置6は、本加圧処理を行う(ステップS206)。具体的には、図27に示すように、接合装置6は、加圧部70を用いて第2基板W2を第1基板W1に第2の押圧力で押圧する。第2の押圧力は、たとえば40~60kNである。これにより、第1基板W1と第2基板W2とが接合されて重合基板Tが形成される。
このように、本実施形態に係る接合システム100では、水平度調整部80を用いて第2基板W2を第1基板W1に第1の押圧力で押圧した状態で、加圧部70を用いて第2基板W2を第1の押圧力よりも大きい第2の押圧力で第1基板W1に押圧することとした。これにより、本加圧処理時における第1基板W1および第2基板W2の位置ずれが防止される。したがって、本実施形態に係る接合システム100によれば、接合精度を向上させることができる。
また、上述したように、本実施形態に係る接合システム100では、第1保持部20は、吊下機構50によって吊り下げられた状態で保持されている(図4参照)。したがって、仮加圧処理および本加圧処理において第1保持部20に押圧力が加わると、第1保持部20は、上方に移動して直上のスペーサー14に当接することとなる。これにより、第1保持部20に印加された押圧力は、直上のスペーサー14や第1支持部材11に伝わることとなる。一方、吊下機構50は、第1保持部20が上昇するとワイヤー52が弛むこととなる。したがって、第1保持部20に印加された押圧力は、吊下機構50には伝わらない。
このように、本実施形態に係る接合システム100によれば、第1保持部20を水平方向に移動可能な状態で支持する機構に対して負荷をかけにくくすることができる。
つづいて、接合装置6は、重合基板Tを所定の降温レートで降温する(ステップS207)。そして、接合装置6は、重合基板Tが所定の温度(たとえば、200℃)まで降温した後、加圧部70の可動シャフト72を下降させるとともに、水平度調整部80を用いて第2保持部30を下降させて、接合処理を終了する。
上述してきたように、本実施形態に係る接合システム100は、熱処理装置5と、接合装置6とを備える。熱処理装置5は、静電吸着力により第1基板W1を保持する第1
保持部502、静電吸着力により第2基板W2を保持する第2保持部503、第1基板W1および第2基板W2を第1の温度に加熱する加熱部522,532(「第1加熱部」の一例に相当)を有する。接合装置6は、静電吸着力により第1基板W1を保持する第1保持部20(「第3保持部」の一例に相当)、静電吸着力により第2基板W2を保持する第2保持部30(「第4保持部」の一例に相当)、第1基板W1および第2基板W2を第1の温度よりも高い第2の温度に加熱する加熱部22,32(「第2加熱部」の一例に相当)、第1保持部20および第2保持部30を相対的に接近させることによって第1基板W1と第2基板W2とを押圧する加圧部70を有する。
保持部502、静電吸着力により第2基板W2を保持する第2保持部503、第1基板W1および第2基板W2を第1の温度に加熱する加熱部522,532(「第1加熱部」の一例に相当)を有する。接合装置6は、静電吸着力により第1基板W1を保持する第1保持部20(「第3保持部」の一例に相当)、静電吸着力により第2基板W2を保持する第2保持部30(「第4保持部」の一例に相当)、第1基板W1および第2基板W2を第1の温度よりも高い第2の温度に加熱する加熱部22,32(「第2加熱部」の一例に相当)、第1保持部20および第2保持部30を相対的に接近させることによって第1基板W1と第2基板W2とを押圧する加圧部70を有する。
したがって、本実施形態に係る接合システム100によれば、接合精度を向上させることができる。
上述してきた実施形態では、接合システム100が実行する一連の基板処理として、前熱処理(ステップS104)および接合処理(ステップS106)において、第1基板W1および第2基板W2を昇温して加熱する場合を例に挙げて説明した。しかし、第1基板W1および第2基板W2の加熱方法は、上記の例に限定されない。
たとえば、前熱処理(ステップS104)は、第1基板W1および第2基板W2を一定温度で加熱する処理であってもよい。この場合、第1保持部502および第2保持部503を予め第1の温度に加熱しておけばよい。また、接合処理(ステップS106)も、第1基板W1および第2基板W2を一定温度で加熱する処理であってもよい。この場合、第1保持部20および第2保持部30を予め第2の温度に加熱しておけばよい。
このように、前熱処理(ステップS104)および接合処理(ステップS106)において、第1基板W1および第2基板W2を一定温度で加熱することにより、第1基板W1および第2基板W2を昇温して加熱する場合と比較して、加熱に要する時間を短縮することができる。
なお、接合システム100では、前熱処理において第1基板W1および第2基板W2を一定温度で加熱した後、接合処理において第1基板W1および第2基板W2を昇温して加熱してもよい。また、接合システム100では、前熱処理において第1基板W1および第2基板W2を昇温して加熱した後、接合処理において第1基板W1および第2基板W2を一定温度で加熱してもよい。また、接合システム100では、前熱処理において第1基板W1および第2基板W2を一定温度で加熱した後、接合処理において第1基板W1および第2基板W2を一定温度で加熱してもよい。
また、上述してきた実施形態では、第1基板W1および第2基板W2のうち一方を撮像部91の被写界深度内に位置させた状態と、第1基板W1および第2基板W2のうち他方を撮像部91の被写界深度内に位置させた状態との各々においてアライメントマークM1,M2を撮像する撮像処理を行う場合の例について説明した。しかし、撮像処理は上記の例に限定されない。たとえば、接合システム100では、第1基板W1および第2基板W2の両方を撮像部91の被写界深度内に位置させた状態でアライメントマークM1,M2を撮像する撮像処理を行ってもよい。
また、上述してきた実施形態では、加圧部70が第2保持部30を鉛直方向に移動させる場合の例について説明したが、加圧部70は、第1保持部20を鉛直方向に移動させるものであってもよい。また、上述してきた実施形態では、水平位置調整部60が第1保持部20の水平位置を調整する場合の例について説明したが、水平位置調整部60は、第2保持部30の水平位置を調整してもよい。また、上述してきた実施形態では、第1保持部20が第2保持部30の上方に配置される場合の例を示したが、第1保持部20は、第2保持部30の下方に配置されてもよい。また、上述してきた実施形態では、撮像部91が第1支持部材11の上方に配置され、光源92が第2支持部材12の下方に配置される場合の例について説明したが、光源92が第1支持部材11の上方に配置され、撮像部91が第2支持部材12の下方に配置されてもよい。
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
本発明は基板同士を接合する際に有用である。
W1 第1基板W2 第2基板T 重合基板5 熱処理装置6 接合装置20 第1保持部30 第2保持部40 チャンバ50 吊下機構60 水平位置調整部70 加圧部80 水平度調整部90 アライメントマーク検出部100 接合システム
Claims (8)
- 基板同士を接合する接合システムであって、
静電吸着力により第1基板を保持する第1保持部、静電吸着力により第2基板を保持する第2保持部、前記第1基板および前記第2基板を第1の温度に加熱する第1加熱部を有する熱処理装置と、
静電吸着力により前記第1基板を保持する第3保持部、静電吸着力により前記第2基板を保持する第4保持部、前記第1基板および前記第2基板を前記第1の温度よりも高い第2の温度に加熱する第2加熱部、前記第3保持部および前記第4保持部を相対的に接近させることによって前記第1基板と前記第2基板とを押圧する加圧部を有する接合装置と、を備える。 - 請求項1に記載の接合システムにおいて、前記第1基板および前記第2基板を常温から前記第1の温度まで昇温する処理を前記熱処理装置に実行させ、その後、前記第1基板および前記第2基板を前記第2の温度まで昇温する処理を前記接合装置に実行させる制御部を備え、前記第1保持部および前記第2保持部の定格使用温度範囲の上限は、前記第3保持部および前記第4保持部の定格使用温度範囲の下限よりも低く設定されている。
- 請求項2に記載の接合システムにおいて、前記第1保持部および前記第2保持部の定格使用温度範囲の上限は、前記第1の温度よりも低く設定され、前記第3保持部および前記第4保持部の定格使用温度範囲の下限は、前記第1の温度よりも高く設定されている。
- 請求項1に記載の接合システムにおいて、前記第1基板および前記第2基板を前記第1の温度で加熱する処理を前記熱処理装置に実行させ、その後、前記第1基板および前記第2基板を前記第2の温度まで昇温する処理を前記接合装置に実行させる制御部を備え、前記第1保持部および前記第2保持部の定格使用温度範囲の下限は、常温よりも高く設定され、前記第1保持部および前記第2保持部の定格使用温度範囲の上限は、前記第3保持部および前記第4保持部の定格使用温度範囲の下限よりも高く設定されている。
- 請求項1に記載の接合システムにおいて、前記熱処理装置は、前記第1保持部および前記第2保持部を収容して内部を密閉可能なチャンバと、前記チャンバ内に処理ガスを供給するガス供給部とを備える。
- 請求項1に記載の接合システムにおいて、前記第1基板および前記第2基板が載置される搬入出ステーションと、前記熱処理装置および前記接合装置に隣接し、前記第1基板および前記第2基板を前記熱処理装置および前記接合装置へ搬送する基板搬送装置が配置される搬送室と、前記搬入出ステーションと前記搬送室との間に設けられるロードロック室と、を備える。
- 請求項6に記載の接合システムにおいて、前記搬送室および前記熱処理装置は、第1の真空度に設定され、前記接合装置は、前記第1の真空度よりも圧力が低い第2の真空度に設定されている。
- 基板同士を接合する接合方法であって、静電吸着力により第1基板を保持する第1保持部、静電吸着力により第2基板を保持する第2保持部、前記第1基板および前記第2基板を第1の温度に加熱する第1加熱部を有する熱処理装置を用い、前記第1基板および前記第2基板を前記第1の温度に加熱する熱処理工程と、静電吸着力により前記第1基板を保持する第3保持部、静電吸着力により前記第2基板を保持する第4保持部、前記第1基板および前記第2基板を前記第1の温度よりも高い第2の温度に加熱する第2加熱部、前記第3保持部および前記第4保持部を相対的に接近させることによって前記第1基板と前記第2基板とを押圧する加圧部を有する接合装置とを用い、前記第1基板と前記第2基板とを前記第2の温度に加熱した状態で接合する接合工程とを含む。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-007246 | 2015-01-16 | ||
| JP2015007246A JP6345606B2 (ja) | 2015-01-16 | 2015-01-16 | 接合システムおよび接合方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016114073A1 true WO2016114073A1 (ja) | 2016-07-21 |
Family
ID=56405628
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/085546 WO2016114073A1 (ja) | 2015-01-16 | 2015-12-18 | 接合システムおよび接合方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6345606B2 (ja) |
| TW (1) | TW201642379A (ja) |
| WO (1) | WO2016114073A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113458578A (zh) * | 2020-03-30 | 2021-10-01 | 超众科技股份有限公司 | 接合装置 |
| CN113458580A (zh) * | 2020-03-30 | 2021-10-01 | 超众科技股份有限公司 | 接合装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0997830A (ja) * | 1995-07-21 | 1997-04-08 | Fuji Electric Co Ltd | 静電チャックホールダ、ウエハ保持機構ならびにその使用方法 |
| JP2007317772A (ja) * | 2006-05-24 | 2007-12-06 | Shinko Electric Ind Co Ltd | 静電チャック装置 |
| JP2011082366A (ja) * | 2009-10-07 | 2011-04-21 | Nikon Corp | 加熱モジュール |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010045156A (ja) * | 2008-08-12 | 2010-02-25 | Toshiba Corp | 半導体装置の製造方法 |
| JP5091296B2 (ja) * | 2010-10-18 | 2012-12-05 | 東京エレクトロン株式会社 | 接合装置 |
| JP5854375B2 (ja) * | 2010-12-24 | 2016-02-09 | ボンドテック株式会社 | 接合装置および接合方法 |
| JP5886783B2 (ja) * | 2012-06-15 | 2016-03-16 | 東京エレクトロン株式会社 | シート剥離装置、接合システム、剥離システム、シート剥離方法、プログラム及びコンピュータ記憶媒体 |
| JP5797167B2 (ja) * | 2012-07-27 | 2015-10-21 | 東京エレクトロン株式会社 | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 |
| JP2014103291A (ja) * | 2012-11-21 | 2014-06-05 | Renesas Electronics Corp | 半導体装置の製造方法 |
-
2015
- 2015-01-16 JP JP2015007246A patent/JP6345606B2/ja active Active
- 2015-12-18 WO PCT/JP2015/085546 patent/WO2016114073A1/ja active Application Filing
-
2016
- 2016-01-11 TW TW105100637A patent/TW201642379A/zh unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0997830A (ja) * | 1995-07-21 | 1997-04-08 | Fuji Electric Co Ltd | 静電チャックホールダ、ウエハ保持機構ならびにその使用方法 |
| JP2007317772A (ja) * | 2006-05-24 | 2007-12-06 | Shinko Electric Ind Co Ltd | 静電チャック装置 |
| JP2011082366A (ja) * | 2009-10-07 | 2011-04-21 | Nikon Corp | 加熱モジュール |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201642379A (zh) | 2016-12-01 |
| JP6345606B2 (ja) | 2018-06-20 |
| JP2016134458A (ja) | 2016-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6353374B2 (ja) | 接合装置、接合システムおよび接合方法 | |
| JP6952853B2 (ja) | 接合システム、および接合方法 | |
| TWI820161B (zh) | 接合裝置及接合方法 | |
| WO2016114067A1 (ja) | 接合装置、接合システムおよび接合方法 | |
| US8899289B2 (en) | Joint method, joint apparatus and joint system | |
| JP6562828B2 (ja) | 検査装置、接合装置、接合システムおよび検査方法 | |
| JP6854696B2 (ja) | 接合装置および接合方法 | |
| JP6353373B2 (ja) | 接合装置、接合システムおよび接合方法 | |
| JP2015015269A (ja) | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 | |
| JP6104700B2 (ja) | 接合方法、接合装置および接合システム | |
| JP6345606B2 (ja) | 接合システムおよび接合方法 | |
| JP2017118000A (ja) | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 | |
| JP6628681B2 (ja) | 接合装置、接合システムおよび接合方法 | |
| JP7105956B2 (ja) | 接合装置 | |
| JP2024006935A (ja) | 接合装置および接合方法 | |
| JP2011129777A (ja) | 基板重ね合わせ装置及びデバイスの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15878024 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15878024 Country of ref document: EP Kind code of ref document: A1 |