WO2016111328A1 - Dispositif de commande de véhicule - Google Patents
Dispositif de commande de véhicule Download PDFInfo
- Publication number
- WO2016111328A1 WO2016111328A1 PCT/JP2016/050346 JP2016050346W WO2016111328A1 WO 2016111328 A1 WO2016111328 A1 WO 2016111328A1 JP 2016050346 W JP2016050346 W JP 2016050346W WO 2016111328 A1 WO2016111328 A1 WO 2016111328A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- control device
- vehicle
- braking command
- electric brake
- braking
- Prior art date
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
Definitions
- the present invention relates to a vehicle control device that controls a vehicle equipped with an electric brake, and relates to a vehicle control device that can increase the redundancy of an electric brake system.
- the reason for such a configuration is that in a hybrid vehicle or an electric vehicle, regenerative power generation is performed with a motor for the purpose of extending the cruising distance, while the braking force is obtained by the regenerative operation, so the braking force in the hydraulic system is reduced. This is because it is necessary to implement regenerative cooperative braking that matches the braking force with the braking request as a whole, and it is necessary to have the above-described configuration that can arbitrarily determine the relationship between the brake pedal and the hydraulic pressure.
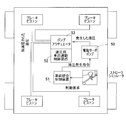
- the hydraulic pressure generated by the electric servo pump 50 is a hydraulic vehicle motion control device 52 (to distinguish it from the vehicle motion control device according to the present invention, which is a control device that controls lock prevention control and skid prevention control performed by the ABS. (Referred to as above).
- the hydraulic vehicle motion control device 52 includes a pump and an actuator 53 that can increase and decrease the hydraulic pressure.
- the hydraulic vehicle motion control device 52 collects each wheel speed, vehicle acceleration, and angular velocity (yaw rate), which are physical quantities for detecting vehicle behavior.
- the hydraulic pressure vehicle motion control device 52 performs the above-described lock prevention control in which the hydraulic pressure of the wheel is relaxed to recover from the locking tendency.
- the hydraulic vehicle motion control device 52 for example, when the steering wheel is turned in a state where the road surface friction coefficient is low, the actual turning is larger than the turning amount expected from the vehicle speed and the steering wheel angle at that time. Predicts that there is a tendency to spin, and performs the above-mentioned skid prevention control that exerts a braking force so as to suppress spin.
- FIG. 10 shows a configuration in which the conventional configuration is replaced with an electric brake.
- the vehicle integrated control device 51 transmits a braking command to the vehicle motion control device 52A based on the braking request.
- the vehicle motion control device 52A removes a pump and an actuator from the hydraulic vehicle motion control device 52 and outputs an electric signal.
- This vehicle motion control device 52A outputs the received braking command as it is in the normal state, and if the lock prevention control is operated in the non-normal state that tends to be locked, for example, the correction is performed by reducing the braking command for the corresponding wheel.
- a finished braking command is output and transmitted to the corresponding electric brake control device 54.
- the electric brake control device 54 exhibits a braking force in accordance with the received braking command.
- the vehicle can be stopped by detecting the disconnection or short circuit of the signal line and notifying the driver or disabling the drive, and guiding it to the safe side in terms of vehicle behavior I was able to. Also, when a driver's drive request is converted into a drive command and the vehicle integrated control device that transmits the command to a drive device such as an engine or a drive motor, or a similar control device becomes abnormal or temporarily functions When was stopped, no driving force was generated, and this could also be guided to the safe side in terms of vehicle behavior.
- the brake pedal that controls the braking force is made by-wire by installing an electric brake, it is considered that it will be replaced with a brake pedal having the same sensor as the accelerator pedal that is currently popular.
- An object of the present invention is a vehicle control device that controls a vehicle equipped with an electric brake, in which the complexity of the communication system is reduced and the redundancy can be increased without pressing the mounting position of the vehicle control device. It is to provide a control device.
- the vehicle control device of the present invention is a vehicle control device that controls a vehicle including an electric brake 1 that generates a pressing force on a friction member 8 by an electric actuator 4 and applies a braking force to a wheel 3.
- This vehicle control device A vehicle integrated control device 15 having a drive control function for giving a drive command to the drive source of the vehicle in response to the accelerator operation means Ap, and an integrated control function for controlling the vehicle in an integrated manner;
- An electric brake control device 14 for controlling the electric brake 1;
- a corrected braking command in which the braking command is corrected in accordance with a set rule is given to the electric brake control device 14 and the wheels 3 are controlled.
- the setting rule is, for example, a rule that is controlled according to the priority order, and is determined based on the results of tests, simulations, and the like.
- the vehicle integrated control device 15 gives a drive command to the drive source of the vehicle in response to the accelerator operation means Ap.
- the vehicle integrated control device 15 performs regenerative cooperative control in which a braking force is generated by a regenerative operation, and controls the vehicle in an integrated manner.
- the electric brake control device 14 controls the electric brake 1.
- the vehicle motion control device 16 receives a braking command from the brake operating means 2 or a braking command from the vehicle integrated control device 15 and gives a corrected braking command in which the braking command is corrected according to the set rule to the electric brake control device 14.
- the wheel 3 lock prevention control or vehicle side skid prevention control is performed.
- vehicle integrated control device 15, electric brake control device 14, and vehicle motion control device 16 are provided on independent housings or substrates, respectively.
- the vehicle integrated control device 15 and the vehicle motion control device 16 can be integrated into one, but the roles of the vehicle integrated control device 15, the electric brake control device 14, and the vehicle motion control device 16 are clarified. These are provided on independent housings or substrates.
- each of the control devices 14, 15, 16 is provided on an independent casing or board and used as a multiplex system. Even when an abnormality occurs in the braking command path, the braking force can be applied to the wheel 3 using the other braking command path. Therefore, no abnormality occurs in the entire control system that generates the braking force, and the redundancy can be increased.
- the contents to be separated are the vehicle integrated control device 15 having the drive control function and the integrated control function, the vehicle motion control device 16 having the function of lock prevention control or skid prevention control, Since the roles of the brake control device 14 are clarified and separated, and the control devices 14, 15 and 16 are provided on independent housings or substrates, the priority order of the control rules can be clearly and simplified. Therefore, the complexity of the communication system can be reduced as compared with the case where the respective control devices are integrated. In particular, since the vehicle integrated control device 15 having an integrated control function and the like and the vehicle motion control device 16 having a vehicle motion control function are separated and divided between those having greatly different roles, it is easy to clarify the roles.
- the vehicle integrated control device 15, the electric brake control device 14, and the vehicle motion control device 16 are provided on independent housings or substrates, the control devices 14, 15, and 16 are smaller than those integrated into one control device. Can be For this reason, the freedom degree at the time of mounting each control apparatus 14,15,16 in a vehicle increases, Therefore It can avoid pressing the mounting position of a vehicle control apparatus, and can improve redundancy.
- the vehicle integrated control device 15 and the vehicle motion control device 16 that respectively generate braking commands for the electric brake control device may be provided in parallel.
- both the vehicle integrated control device 15 and the vehicle motion control device 16 can detect a braking command from the brake operation means 2 and can generate a braking command to the electric brake control device 14.
- a system for supplying a braking command from the brake operating means 2 to the vehicle integrated control device 15 and a system for supplying a braking command from the brake operating means 2 to the vehicle motion control device 16 may be provided independently of each other. In this case, even if an abnormality such as disconnection occurs in one of the systems, the braking command can be transmitted using the other system.
- the vehicle integrated control device 15, the vehicle motion control device 16, and the electric brake control device 14 may have communication paths that can communicate with each other. As such a communication path that can communicate with each other, for example, control area network (CAN) control communication can be applied.
- CAN control area network
- the vehicle integrated control device 15 and the vehicle motion control device 16 calculate a reference braking command as a braking command to be transmitted to the electric brake control device 14 according to a predetermined relationship based on a braking command input to each path.
- the reference braking command calculation unit 17 may be provided. The defined relationship is determined by the result of a test or simulation, for example. In this case, each reference braking command calculation unit 17 can calculate the reference braking command with reference to a map showing the relationship between the braking command and the reference braking command.
- the vehicle integrated control device 15 includes a regenerative cooperative control unit 18 that performs a regenerative cooperative control in which the braking force actually generated differs from the reference braking command calculated by the reference braking command calculating unit 17, and this regenerative cooperative control.
- the unit 18 may increase or decrease a braking command corresponding to a braking force necessary for regenerative cooperative control with respect to the reference braking command and transmit the braking command to the electric brake control device 14.
- the regenerative cooperative control unit 18 can increase or decrease the braking command for the braking force necessary for the regenerative cooperative control.
- the regenerative cooperative control unit 18 regenerates the drive source of the vehicle, collects energy to obtain a braking force, and generates the braking force output by the electric brake 1 so that excessive braking force is not generated with respect to the braking command. Subtract.
- the vehicle motion control device 16 When the vehicle motion control device 16 performs lock prevention control or skid prevention control in which the braking force actually generated differs from the reference braking command calculated by the reference braking command calculation unit 17, the vehicle motion control device 16 locks against the reference braking command.
- a braking command corresponding to a braking force necessary for prevention control or skid prevention control may be increased or decreased and transmitted to the electric brake control device 14.
- the vehicle motion control device 16 increases or decreases the braking command for the braking force necessary for the lock prevention control with respect to the reference braking command to avoid the wheels from being completely locked.
- the vehicle motion control device 16 increases or decreases the braking command corresponding to the braking force necessary for the skid prevention control with respect to the reference braking command to avoid the vehicle from skidding.
- the vehicle integrated control device 15 and the vehicle motion control device 16 may transmit a braking command to the electric brake control device 14 only when necessary based on whether or not the control is performed. In this case, interference between the braking command between the vehicle integrated control device 15 and the electric brake control device 14 and the braking command between the vehicle motion control device 16 and the electric brake control device 14 can be avoided.
- the set priority order is set. Based on this, the priority of the braking command transmitted to the electric brake control device 14 may be determined. Even when the competing braking commands are transmitted to the electric brake control device 14, only one of the braking commands is determined, so that the braking commands can be prevented from interfering with each other.
- the electric brake control device 14 When a competing braking command is transmitted to the electric brake control device 14 as a result of execution or non-execution of the control by the vehicle integrated control device 15 and the vehicle motion control device 16, the electric brake control device 14 May select the transmitted braking command based on the set priority. Even if the competing braking commands are transmitted to the electric brake control device 14, the electric braking control device 14 selects only one of the braking commands, thereby preventing the braking commands from interfering with each other. obtain.
- the vehicle motion control device 16 transmits a reference braking command to the electric brake control device 14, and also performs the lock prevention control or the side slip prevention control.
- the vehicle integrated control device 15 may transmit a reference braking command to the electric brake control device 14. With this configuration, redundancy can be increased.
- FIG. 1 is a diagram schematically showing an electric brake 1 of a vehicle equipped with this vehicle control device.
- a vehicle for example, a four-wheel drive type electric vehicle in which front and rear wheels are independently driven by a drive motor (not shown) is applied.
- the electric brake 1 applies a braking force independently to each wheel 3 (FIG. 2) of the vehicle via the electric brake control device 14 and the like by operating a brake pedal 2 (FIG. 2) which is a brake operating means. Append.
- Each electric brake 1 includes an electric motor 4 that is an electric actuator, a speed reduction mechanism 5 that decelerates the rotation of the electric motor 4, a linear motion mechanism 6, a brake rotor 7, and a friction pad 8 that is a friction member.
- the electric motor 4, the speed reduction mechanism 5, and the linear motion mechanism 6 are incorporated in, for example, a housing not shown.
- the side closer to the outer side in the vehicle width direction of the vehicle equipped with the vehicle control device is referred to as the outboard side, and the side closer to the center of the vehicle is referred to as the inboard side.
- the speed reduction mechanism 5 is a mechanism that reduces and transmits the rotation of the electric motor 4 to the tertiary gear 10 fixed to the rotary shaft 9, and includes a primary gear 11, an intermediate gear 12, and a tertiary gear 10.
- the speed reduction mechanism 5 rotates the primary gear 11 attached to the rotor shaft 4a of the electric motor 4 by, for example, an intermediate gear 12 having a configuration in which two large and small gears are integrally stacked in the axial direction.
- transmission to the tertiary gear 10 fixed to the end of the rotary shaft 9 is enabled.
- the linear motion mechanism 6 is a mechanism that converts the rotational motion output from the speed reduction mechanism 5 into a linear motion of the linear motion portion 13 by a feed screw mechanism and causes the friction pad 8 to contact or separate from the brake rotor 7. .
- the linear motion portion 13 is supported so as to be freely rotatable in the axial direction indicated by the arrow A1.
- a friction pad 8 is provided at the end of the linear motion portion 13 on the outboard side.
- the vehicle control device mounted on the vehicle includes a vehicle integrated control device 15, an electric brake control device 14, and a vehicle motion control device 16 as shown in FIG.
- the vehicle integrated control device 15 is a predetermined conversion function stored in an LUT (Look Up Table) realized by software or hardware, or a software library, or equivalent hardware.
- Etc. hereinafter referred to as “embodiment model”
- a hardware circuit or processor capable of performing calculations for realizing a control function, an integrated control function for controlling a vehicle described later, and the like, and outputting the drive command, a braking command described later, and other control signals It consists of the above software functions.
- the vehicle motion control device 16 specifically uses the above-described embodiment model, as will be described in detail later, a braking command from the brake pedal 2 serving as a brake operating means or a braking command from the vehicle integrated control device 15.
- the corrected braking command obtained by correcting the braking command is output to the electric brake control device 14 in accordance with setting rules defined in the program (rules to be controlled in accordance with the priority order, which will be described later).
- 3 is constituted by a hardware circuit or a software function on a processor capable of performing an operation for realizing the lock prevention control 3 or the vehicle skid prevention control.
- the electric brake control device 14 receives the input of the braking command or the corrected braking command using the above-described embodiment model, and rotates the rotational speed and rotational speed of the electric motor 4 or the brake rotor 7. It is composed of a hardware circuit or a software function on a processor that can calculate and output the pressing force to the friction pad 8 and control the corresponding electric brake 1.
- control related to braking and the control performed by the vehicle motion control device 16 and the electric brake control device 14 are the following three.
- Vehicle integrated control device 15 When a braking request is input as in the regenerative cooperative control, a braking force is generated by regeneration of a vehicle drive motor (not shown), and the braking force does not operate the electric brake 1, that is, the vehicle It is a control that integrates various information and cooperates with components other than the brake.
- hill hold control for preventing the slope from slipping down, or changing the relationship between the brake depression amount and the braking force to be generated according to the vehicle speed, that is, the depression amount of the brake pedal 2 and the electric drive The control deviates from the relationship with the braking force generated by the brake 1, and it is possible to travel safely even if these do not work.
- Vehicle motion control charge Vehicle motion control device 16
- a preset risk is set.
- the control is to increase or decrease the braking force without depending on the braking request. For example, if the wheel 3 tends to lock, the braking force of the corresponding wheel 3 is reduced, and if the vehicle is about to spin rightward, the braking force is generated on the left wheel 3 to suppress the spin.
- These controls are performed in a dangerous state to improve safety, but these controls are not performed for many hours of driving, and even in situations where a dangerous state is determined, If an appropriate driving operation is performed, it is possible to travel.
- Braking force generation control charge Electric brake control device 14 As shown in FIG. 1, the electric brake control device 14 drives the electric motor 4 that is an electric actuator based on the braking command determined by the braking request, and generates a pressing force to the brake rotor 7 on the friction pad 8. Thus, control for generating a braking force is performed. This control is always performed unless a reasonable judgment is made for a special reason. As an example of a reasonable judgment for this special reason, for example, when an abnormality has occurred in some of the components of the electric brake 1, it is determined that a significantly large braking force is generated with respect to the braking command. This is a case where it is determined that no braking force is generated in order not to disturb the vehicle behavior (for example, to avoid locking only one wheel).
- the braking force generation control can be performed in any case as long as the braking command can be transmitted to the electric brake control device 14. It is assumed that this is also implemented in
- the braking force generation control is in the order of 1 ⁇ 2 ⁇ 3 in order of increasing complexity of control, which requires more device information. Further, from the viewpoint of preventing accidents, even if the function is limited due to an abnormality or the like, the order of priority of control to be maintained without stopping control is 3 ⁇ 2 ⁇ 1. This is the same when, for example, the controls 1 and 2 are performed normally and simultaneously, and the basic rule is that 2 is prioritized assuming that the control 3 is always performed. Therefore, it is desirable that the vehicle configuration be configured so that reliability can be ensured in the order of 3 ⁇ 2 ⁇ 1 when an abnormality occurs in a component while efficiently performing three controls when there is no abnormality in the component.
- FIG. 2 shows a multiplexing configuration by separating and arranging the vehicle integrated control device 15 and the vehicle motion control device 16 that realize the above requirements.
- one electric brake control device 14 is arranged for each electric brake 1 of each wheel 3.
- the corresponding electric brake control device is provided. It is good also as a structure which integrated 14 and reduced the quantity.
- the brake pedal 2 is provided with a plurality of sensors 2a (here, referred to as stroke sensors 2a) for detecting the depression amount.
- Each stroke sensor 2a has an independent structure, and signal lines for transmitting respective output signals are separately connected to the vehicle integrated control device 15 and the vehicle motion control device 16 through independent signal lines. .
- the vehicle integrated control device 15, the electric brake control device 14, and the vehicle motion control device 16 are provided on independent housings or substrates, respectively.
- an electric control unit (ECU) is applied as the vehicle integrated control device 15, for example.
- the vehicle integrated control device 15, the vehicle motion control device 16, and all the electric brake control devices 14 are connected to one communication system.
- control area network (CAN) control communication is premised, but at least the vehicle integrated control device 15 and the vehicle motion control device 16 can communicate bidirectionally, and these two control devices 15 and 16 are each electrically driven.
- a communication system that can transmit commands to the brake control device 14 may be used.
- the vehicle integrated control device 15 and the vehicle motion control device 16 are arranged in parallel, both of which can detect the driver's braking request, that is, the braking command from the brake pedal 2, and the braking command. Can be generated. For this reason, even when an abnormality occurs in any one of the command generation paths, the abnormality does not occur in the entire control system that generates the braking force.
- the vehicle integrated control device 15 and the vehicle motion control device 16 can be integrated into one, but as described above, the roles of the vehicle integrated control device 15 and the vehicle motion control device 16 are clarified. Redundancy can be improved by forming and using a multiplex system with these two control devices 15 and 16 after being installed separately in independent housings or substrates.
- the vehicle integrated control device 15 and the vehicle motion control device 16 are divided into the roles of the vehicle integrated control device 15 and the vehicle motion control device 16 by mounting a plurality of arithmetic units (CPUs) even when the housing and the board are integrated.
- CPUs arithmetic units
- braking requests are input to the vehicle integrated control device 15 and the vehicle motion control device 16 from the brake pedal 2 using the respective paths. Since this braking request is an amount indicating the physical depression amount of the brake pedal 2, it cannot be actually braked unless it is converted into a pressing force of the electric brake 1 of each wheel 3 and is not a pressing command. . Therefore, both the control devices 15 and 16 perform an operation for converting the braking request into a command value of the pressing force, that is, the braking command, before performing the above-described additional control and vehicle motion control.
- This calculation is performed, for example, by referring to a map such as a preset pedal depression amount and a braking command for each wheel 3.
- the braking command obtained as a result becomes a reference value when the vehicle integrated control and the vehicle motion control are performed, and this is used as the reference braking command.
- the vehicle integrated control device 15 and the vehicle motion control device 16 each have a reference braking command calculation unit 17, and each reference braking command calculation unit 17 specifically uses the above-described embodiment model to generate the brake pedal 2.
- a reference braking command serving as a reference to be transmitted to the electric brake control device 14 is calculated and output according to the relationship defined in the map or the like stored in the LUT. It consists of possible hardware circuits or software functions on the processor.
- each reference braking command calculation unit 17 obtains a reference braking command from the braking request.
- This reference braking command is a braking command for the vehicle integrated control device 15 when the additional control is not performed, and a braking command for the vehicle motion control device 16 when the vehicle motion control is not performed.
- additional controls for example, regenerative cooperative control
- a part of the braking force required from the braking request according to various information of the vehicle is not covered by the regenerative operation of the drive motor.
- a corrected braking command corrected by subtracting the minute from the reference braking command is determined.
- additional control hill hold and anti-slip control anti-spin prevention can also be used for the reference braking command (same as there is no pedal operation and no command).
- a braking force required by each control is applied to determine a braking command.
- the driver's braking request is input to the vehicle via the stroke sensor 2a of the brake pedal 2.
- the input braking request is input to both the vehicle integrated control device 15 and the vehicle motion control device 16, and each reference braking command calculation unit 17 of the vehicle integrated control device 15 and the vehicle motion control device 16 performs the reference as described above.
- a braking command is obtained by calculation.
- the vehicle motion control device 16 does not perform the vehicle motion control, and the vehicle integrated control device 15 does not perform the additional control (normally this time) State).
- the reference braking command calculated by the reference braking command calculation unit 17 in the vehicle integrated control device 15 is transmitted to the electric brake control device 14.
- the vehicle motion control device 16 operates so as not to interfere with the transmission of the braking command between the vehicle integrated control device 15 and the electric brake control device 14 (for example, the vehicle motion control device 16 does not transmit the braking command).
- the electric brake control device 14 does not select it.
- the braking command transmitted by the vehicle integrated control device 15 is adopted.
- the vehicle integrated control device 15 performs additional control.
- the vehicle integrated control device 15 includes a regenerative cooperative control unit 18 that performs regenerative cooperative control as additional control.
- the regenerative cooperative control unit 18 uses the above-described realization model, the subtraction function, and hardware equivalent thereto to regenerate the vehicle drive motor and collect the braking force while collecting energy.
- the subtraction operation is performed by subtracting the regenerative amount from the braking force output by the electric brake 1 in accordance with this. It is composed of a hardware circuit that can output a braking command or a software function on the processor. The braking force output from the electric brake 1 determined in this way is converted into a braking command and transmitted to the electric brake control device 14.
- the entire vehicle can be braked without excess or deficiency with respect to the braking request by the braking force generated by the regeneration of the drive motor and the braking force generated by the electric brake 1.
- the vehicle motion control device 16 has no vehicle motion control to be performed, and operates so as not to interfere with transmission of a braking command between the vehicle integrated control device 15 and the electric brake control device 14 (for example, the vehicle motion control device 16 Does not transmit a braking command, or even if the vehicle motion control device 16 transmits a braking command, it is not selected by the electric brake control device 14), which is the same as in the normal state.
- vehicle motion control is further performed during the normal state or additional control described above.
- lock prevention control is performed as vehicle motion control.
- the vehicle motion control device 16 transmits a braking command to the electric brake control device 14 corresponding to the wheel 3 with a value smaller than the value obtained from the braking request.
- the braking command transmitted by the vehicle motion control device 16 in a state where the vehicle motion control is being performed needs to have priority over the braking command transmitted by the vehicle integrated control device 15. . Therefore, for example, when the vehicle motion control device 16 declares that the vehicle motion control is being performed, the vehicle integrated control device 15 stops the transmission of the braking command, or the vehicle motion control device 16 and the vehicle integrated control device 15. The priority of the braking command is maintained by giving priority to the communication transmitted by the vehicle motion control device 16 when the communication is competing or by selecting it in the electric brake control device 14.
- the braking operation is controlled so that at least the braking force exerted by each wheel determined by the vehicle motion control device 16 is satisfied.
- each control device 15, 16 transmits a braking command to the electric brake control device 14, when this is performed by communication, a communication message for transmitting the command
- the received electric brake control device 14 refers to this by adding the data indicating the state to. Specifically, when the vehicle integrated control device 15 performs additional control, this data is changed to a value indicating that additional control is being performed.
- this data is changed to a value indicating that the vehicle motion control is being performed.
- the electric brake control device 14 that has received both data can employ the braking command transmitted by the vehicle motion control device 16 having a higher priority with reference to these data.
- Detection and notification of disconnection or short circuit is performed by a disconnection / short circuit detection method (for example, Patent Documents 1 to 3 described above) conventionally used in connected control devices.
- the control device 15 (16) that has detected its own disconnection and short circuit declares on the communication that it cannot issue a braking command to the other control device 16 (15). Declaring that the braking command transmitted by the driver has priority, the electric brake control device 14 can rationally select the braking command.
- the control device 15 (16) is controlled by the other control device 16 (15). On the other hand, it is performed by declaring on the communication that the braking command cannot be transmitted by itself.
- the control device 15 (16) self-diagnosed as abnormal stops communication a bus-off specified by a standard such as CAN communication occurs, and the other control device 16 (15) detects the bus-off.
- the control device 15 (16) self-diagnosed as abnormal stops communication and the other control device 16 (15) detects that the control device 15 (16) without communication is abnormal because there is no communication for a certain period of time.
- the vehicle integrated control device 15 or the signal line between the vehicle integrated control device 15 and the stroke sensor 2a is disconnected or short-circuited or a malfunction of the stroke sensor 2a occurs while the vehicle is running.
- the vehicle motion control device 16 operating normally finds that the braking command transmitted by the vehicle motion control device 16 has priority from the above-described detection and notification method, the stroke sensor 2a connected to the vehicle motion control device 16 is recognized.
- the required braking force can be generated by converting the braking request output by the control signal into a reference braking command and transmitting it to the electric brake control device 14.
- the vehicle motion control device 16 can perform the lock prevention control similarly to the case where there is no functional abnormality. .
- the vehicle motion control device 16 or a signal line between the vehicle motion control device 16 and the stroke sensor 2a is disconnected or short-circuited or a malfunction of the stroke sensor 2a occurs while the vehicle is running.
- the vehicle integrated control device 15 operating normally finds that the braking command transmitted by the vehicle integrated control device 15 has priority from the detection and notification methods described above, the stroke sensor 2a connected to the vehicle integrated control device 15 is used.
- a necessary braking force can be generated.
- vehicle motion control cannot be performed when vehicle motion control becomes necessary, the driver is informed of abnormality information at an early stage to urge the driver to perform inspection and repair.
- the vehicle motion control device 16 when the vehicle motion control device 16 is normal and an abnormality occurs in the stroke sensor 2a connected to the vehicle motion control device 16 or its signal line, the vehicle motion control device 16 The abnormal state is transmitted to the vehicle integrated control device 15 by communication, and the braking request acquired by the vehicle integrated control device 15 is transmitted to the vehicle motion control device 16. Thereby, since the vehicle motion control apparatus 16 can use the braking request
- the above-mentioned data indicating the state added to the communication message for command transmission when the control devices 15 and 16 declare an abnormality as described above may be used. Specifically, when any one of the control devices 15 (16) makes a self-diagnosis that is abnormal, the data is changed to a value indicating abnormality.
- the other control device 16 (15) or the electric brake control device 14 that has received the data indicating the abnormality refers to the data indicating the abnormality and takes measures to prevent the abnormality of the function that generates the braking force as described above. Can take.
- FIG. 3 for the vehicle integrated control device 15, FIG. 4 for the vehicle motion control device 16, and FIG. 5 for the electric brake control device 14.
- FIG. 3 for the vehicle integrated control device 15, FIG. 4 for the vehicle motion control device 16, and FIG. 5 for the electric brake control device 14.
- the vehicle integrated control device 15 communicates with the drive device of the drive motor to perform regenerative braking. Or collecting information from various sensors is omitted for convenience of explanation.
- description will be made with reference to FIG. 2 as appropriate.
- the reference braking command calculation unit 17 of the vehicle integrated control device 15 outputs a reference braking command as a braking command to be transmitted to the electric brake control device 14.
- the vehicle integrated control device 15 determines whether or not a signal indicating a malfunction of the other vehicle motion control device 16 has been received (step a2).
- step a2 determines whether or not a signal such as a malfunction is received (step a2: yes)
- the vehicle integrated control device 15 declares that the braking command transmitted by itself has priority (step a3), and then proceeds to step a4.
- step a2 when the vehicle integrated control device 15 does not receive a signal indicating a malfunction of the vehicle motion control device 16 (step a2: no), the process proceeds to step a4.
- step a4 the vehicle integrated control device 15 determines its own abnormality by the self-diagnosis function.
- step a4 yes
- the vehicle integrated control device 15 declares an abnormality to the vehicle motion control device 16 (step a5).
- step a4 no
- it is determined whether or not to perform vehicle integrated control as additional control step a6).
- step a6 yes
- the vehicle integrated control device 15 corrects the braking command (step a7), and transmits the braking command to the electric brake control device 14 (step a8).
- step a6: no the process proceeds to step a8, and the vehicle integrated control device 15 transmits the braking command without correcting the braking command.
- step a6 ′ in FIG. 4, “execution of vehicle motion control” is determined, unlike “execution of vehicle integrated control” in a6 of FIG.
- step b 1 After starting the control flow of the electric brake control device 14, when the electric brake control device 14 receives a braking command (step b 1), any of the vehicle motion control device 16 and the vehicle integrated control device 15 is selected. It is confirmed whether the brake command to be transmitted has priority (step b2). If the braking command transmitted by the vehicle motion control device 16 has priority (step b3: yes), the electric brake control device 14 selects the braking command transmitted by the vehicle motion control device 16 (step b4).
- step b3 When the braking command transmitted from the vehicle motion control device 16 has no priority (step b3: no), the electric brake control device 14 selects the braking command transmitted from the vehicle integrated control device 15 (step b5). Thereafter, the electric brake control device 14 causes the electric brake 1 to exert a braking force based on the selected braking command (step b6).
- the vehicle integrated control device 15, the electric brake control device 14, and the vehicle motion control device 16 are provided in independent housings or substrates and used as a multiplex system. Even when an abnormality occurs in one of the braking command paths, the braking force can be applied to the wheel using the other braking command path. Therefore, no abnormality occurs in the entire control system that generates the braking force, and the redundancy can be increased.
- the contents to be separated are the vehicle integrated control device 15 having the drive control function and the integrated control function, the vehicle motion control device 16 having the function of lock prevention control or skid prevention control, Since the roles of the brake control device 14 are clarified and separated, and the control devices 14, 15 and 16 are provided on independent housings or substrates, the priority order of the control rules can be clearly and simplified. Therefore, the complexity of the communication system can be reduced as compared with the case where the respective control devices are integrated. In particular, since the vehicle integrated control device 15 having an integrated control function and the like and the vehicle motion control device 16 having a vehicle motion control function are separated and divided between those having greatly different roles, it is easy to clarify the roles.
- the vehicle integrated control device 15, the electric brake control device 14, and the vehicle motion control device 16 are provided on independent housings or substrates, the control devices 14, 15, and 16 are smaller than those integrated into one control device. Can be For this reason, the freedom degree at the time of mounting each control apparatus 14,15,16 in a vehicle increases, Therefore It can avoid pressing the mounting position of a vehicle control apparatus.
- FIG. 6 is a block diagram of a control system showing a configuration in which only pressing requests are arranged in parallel.
- there are two independent stroke sensors 2a in this embodiment, there are two sensors 2a
- the vehicle integrated control device 15 and the vehicle motion control device 16 are independent of each other but in series. It is the structure connected to.
- the electric brake control device 14 and the vehicle motion control device 16 are more protected than the other components of the vehicle so that no abnormality occurs in the generation of braking force as a design for vehicle safety, for example,
- the vehicle motion control device 16 generates a braking command, so that the braking force generation control can be performed.
- the braking force can be exerted as intended by the driver. Therefore, there is an advantage that the redundancy of the entire vehicle is higher than the configuration of FIG.
- FIG. 7 the configuration of FIG. 7 is also conceivable.
- the vehicle integrated control device 15 and the vehicle motion control device 16 are independent and are installed in parallel with the electric brake control device 14.
- the stroke sensor 2 a has only one system and is connected to the vehicle integrated control device 15.
- the vehicle integrated control device 15, which plays various roles such as vehicle braking / driving, power management, notification to the driver, etc., is configured such that the function is not stopped even if the function is limited by possible means, for example, a power supply It is assumed that this is realized by redundancy of the CPU and various components of the control device.
- FIG. 8 is also conceivable.
- the configuration of FIG. 8 is characterized in that the vehicle integrated control device and the vehicle motion control device as shown in FIG. 10 are arranged in series, and a pressing request as shown in FIG. 2 is input to the vehicle integrated control device and the vehicle motion control device.
- These two control devices 15 and 16 and the electric brake control device 14 have both the characteristics of being arranged in parallel.
- the priority of command transmission by arranging the control devices 15 and 16 in series is simplified while all of them are operating normally while satisfying the redundancy ensured so far.
- a higher-level control device can determine a control content with higher importance and transmit it to a lower-level control device, or implement the control content). It can be said that there is.
- an electric vehicle that drives either a front wheel or a rear wheel with a drive motor may be applied, or a hybrid that drives either a front wheel or a rear wheel with a drive motor and drives the other with an internal combustion engine.
- a car of the type may be applied.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Regulating Braking Force (AREA)
- Braking Systems And Boosters (AREA)
Abstract
L'invention concerne un dispositif de commande de véhicule qui permet de réduire la complexité d'un système de communication et d'augmenter la redondance sans limiter une position de montage du dispositif de commande de véhicule. Le dispositif de commande de véhicule comprend : un dispositif de commande intégré de véhicule (15) qui possède une fonction de commande d'entraînement pour donner une commande d'entraînement à une source d'entraînement d'un véhicule en réponse à un moyen d'actionnement d'accélérateur (Ap), ainsi qu'une fonction de commande intégrée de commande intégrée du véhicule ; un dispositif de commande de frein électrique (14) qui commande un frein électrique (1) ; et un dispositif de commande de déplacement de véhicule (16) qui reçoit une commande de freinage à partir d'un moyen d'actionnement de frein (2) ou une commande de freinage à partir du dispositif de commande intégré du véhicule (15) et exécute une commande de prévention de blocage ou une commande de prévention de dérapage en donnant au dispositif de commande de frein électrique (14) une commande de freinage corrigé qui est une commande de freinage corrigé conformément à une règle prédéfinie. Le dispositif de commande intégré du véhicule (15), le dispositif de commande de frein électrique (14) et le dispositif de commande de déplacement de véhicule (16) sont disposés dans des logements ou substrats indépendants respectifs.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015001994A JP6407732B2 (ja) | 2015-01-08 | 2015-01-08 | 車両制御装置 |
| JP2015-001994 | 2015-01-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016111328A1 true WO2016111328A1 (fr) | 2016-07-14 |
Family
ID=56356014
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/050346 WO2016111328A1 (fr) | 2015-01-08 | 2016-01-07 | Dispositif de commande de véhicule |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6407732B2 (fr) |
| WO (1) | WO2016111328A1 (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018084108A1 (fr) * | 2016-11-07 | 2018-05-11 | 株式会社デンソー | Structure de fixation pour moteur de véhicule, équipement embarqué, et moteur sans balai |
| US11649742B2 (en) | 2016-11-07 | 2023-05-16 | Denso Corporation | Attachment structure for vehicle motor, in-vehicle equipment, and brushless motor |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6838217B2 (ja) * | 2016-10-19 | 2021-03-03 | 日立Astemo株式会社 | 車両制御装置 |
| CN110546053B (zh) * | 2017-03-31 | 2022-06-17 | 日立安斯泰莫株式会社 | 车辆用制动系统 |
| JP6893239B2 (ja) | 2017-03-31 | 2021-06-23 | 日立Astemo株式会社 | 車両用ブレーキシステム |
| US20200031323A1 (en) * | 2017-03-31 | 2020-01-30 | Nissin Kogyo Co., Ltd. | Vehicle brake system |
| WO2019003537A1 (fr) | 2017-06-28 | 2019-01-03 | 日信工業株式会社 | Système de frein de véhicule |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003137081A (ja) * | 2001-11-01 | 2003-05-14 | Hitachi Ltd | ブレーキ装置 |
| JP2008207662A (ja) * | 2007-02-26 | 2008-09-11 | Hitachi Ltd | ブレーキ制御装置及びブレーキ制御方法 |
| JP2012035840A (ja) * | 2011-11-11 | 2012-02-23 | Nissan Motor Co Ltd | 車両の制動制御装置 |
| JP2013203275A (ja) * | 2012-03-29 | 2013-10-07 | Hitachi Automotive Systems Ltd | 電動ブレーキ装置 |
-
2015
- 2015-01-08 JP JP2015001994A patent/JP6407732B2/ja not_active Expired - Fee Related
-
2016
- 2016-01-07 WO PCT/JP2016/050346 patent/WO2016111328A1/fr active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003137081A (ja) * | 2001-11-01 | 2003-05-14 | Hitachi Ltd | ブレーキ装置 |
| JP2008207662A (ja) * | 2007-02-26 | 2008-09-11 | Hitachi Ltd | ブレーキ制御装置及びブレーキ制御方法 |
| JP2012035840A (ja) * | 2011-11-11 | 2012-02-23 | Nissan Motor Co Ltd | 車両の制動制御装置 |
| JP2013203275A (ja) * | 2012-03-29 | 2013-10-07 | Hitachi Automotive Systems Ltd | 電動ブレーキ装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018084108A1 (fr) * | 2016-11-07 | 2018-05-11 | 株式会社デンソー | Structure de fixation pour moteur de véhicule, équipement embarqué, et moteur sans balai |
| US11649742B2 (en) | 2016-11-07 | 2023-05-16 | Denso Corporation | Attachment structure for vehicle motor, in-vehicle equipment, and brushless motor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016124509A (ja) | 2016-07-11 |
| JP6407732B2 (ja) | 2018-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016111328A1 (fr) | Dispositif de commande de véhicule | |
| JP6214730B2 (ja) | 車両制御システム | |
| JP4416207B2 (ja) | 自動車用電気式ブレーキ装置 | |
| US9827873B2 (en) | Electric vehicle control system | |
| JP4478037B2 (ja) | 車両制御装置 | |
| US6157887A (en) | Brake system for a motor vehicle | |
| US9650038B2 (en) | Vehicle control system | |
| JP3242900B2 (ja) | 自動車用電気式ブレーキ装置 | |
| EP2876007B1 (fr) | Dispositif de génération de force de freinage pour véhicule | |
| JP6558043B2 (ja) | 車両の制御装置 | |
| JP6153857B2 (ja) | 車両用制動装置 | |
| WO2018181807A1 (fr) | Système de freinage de véhicule | |
| JP2000016262A (ja) | 自動車用電気機械式ブレ―キ装置 | |
| KR101888454B1 (ko) | 통합형 전자제어장치의 페일 세이프 제어장치 및 제어방법 | |
| JPWO2019003537A1 (ja) | 車両用ブレーキシステム | |
| JP4528457B2 (ja) | 自動車用ブレーキ装置及びその制御方法 | |
| CN107278190B (zh) | 用于确定在机动车中是否存在故障状态的方法和装置 | |
| KR20140057893A (ko) | 전동식 제동 시스템의 제어 장치 및 제어 방법 | |
| JP2018172031A (ja) | 車両用ブレーキシステム | |
| JP2016196255A (ja) | 車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16735067 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16735067 Country of ref document: EP Kind code of ref document: A1 |