WO2015115041A1 - 無線電力伝送の制御装置、無線電力伝送システムおよび無線電力伝送の制御方法 - Google Patents
無線電力伝送の制御装置、無線電力伝送システムおよび無線電力伝送の制御方法 Download PDFInfo
- Publication number
- WO2015115041A1 WO2015115041A1 PCT/JP2015/000162 JP2015000162W WO2015115041A1 WO 2015115041 A1 WO2015115041 A1 WO 2015115041A1 JP 2015000162 W JP2015000162 W JP 2015000162W WO 2015115041 A1 WO2015115041 A1 WO 2015115041A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- power transmission
- control
- wireless power
- transmission
- parameter
- Prior art date
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 251
- 238000000034 method Methods 0.000 title claims description 32
- 230000008859 change Effects 0.000 claims abstract description 26
- 238000013480 data collection Methods 0.000 claims abstract description 25
- 239000013535 sea water Substances 0.000 claims description 25
- 230000004044 response Effects 0.000 claims description 4
- 230000007613 environmental effect Effects 0.000 description 47
- 238000010586 diagram Methods 0.000 description 21
- 230000000694 effects Effects 0.000 description 17
- 238000005516 engineering process Methods 0.000 description 8
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 8
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 238000002986 genetic algorithm method Methods 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 238000013213 extrapolation Methods 0.000 description 5
- 238000000926 separation method Methods 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 230000009194 climbing Effects 0.000 description 3
- 230000005674 electromagnetic induction Effects 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 230000035699 permeability Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000012876 topography Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000009774 resonance method Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
- H02J50/12—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling of the resonant type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/30—Supply or distribution of electrical power
- B64U50/34—In-flight charging
- B64U50/35—In-flight charging by wireless transmission, e.g. by induction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/80—Circuit arrangements or systems for wireless supply or distribution of electric power involving the exchange of data, concerning supply or distribution of electric power, between transmitting devices and receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/90—Circuit arrangements or systems for wireless supply or distribution of electric power involving detection or optimisation of position, e.g. alignment
Definitions
- the present invention relates to a wireless power transmission control device, a wireless power transmission system, and a wireless power transmission control method, and more particularly, to a wireless power transmission control device and wireless communication in an environment where a control target is moving in the air or underwater.
- the present invention relates to a power transmission system and a wireless power transmission control method.
- the power transmission characteristics when the relative positional relationship between the power transmitting antenna and the power receiving antenna and the state of the medium between the antennas (hereinafter sometimes referred to as a transmission medium) are changed.
- Technology that compensates for variations is important. The reason is that when the relative positional relationship between the power transmitting and receiving antennas and the state of the medium change, the amount of magnetic flux passing through the power receiving antenna changes, and the frequency (optimum frequency) and load (optimum load) at which maximum power transmission efficiency can be obtained. This is because of changes.
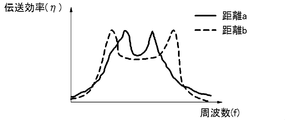
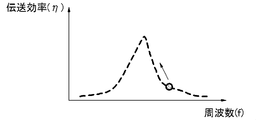
- FIG. 10 is a conceptual diagram showing the relationship between the power transmission efficiency and the frequency when the resonance method is used.
- the relationship between power transmission efficiency and frequency when the distance between the power transmitting antenna and the power receiving antenna is a distance a (solid line) and a distance b (broken line) is shown. That is, the response relationship between the power transmission efficiency and the frequency changes depending on the distance between the power transmitting and receiving antennas, and the optimum frequency at which the power transmission is maximized changes accordingly. It is known that such a change in the optimum frequency is caused by a change in the resonance state, that is, a change in the coupling state of the magnetic flux.
- Such a technique for compensating for the fluctuation of the resonance state is particularly important as a technique for efficiently charging a moving body such as an EV. For example, assuming that the EV stops when approaching a source installed on the ground, the EV stops at different positions depending on the driver. Therefore, the relative positional relationship (distance and angle) between the power transmission antenna mounted on the source installed on the ground and the power reception antenna mounted on the EV varies for each power supply opportunity. Therefore, a technique for compensating for fluctuations in the resonance state (changes in the coupling state of magnetic flux) is important.
- a circuit system that adjusts the circuit constants (capacities) of the power transmitting antenna and the power receiving antenna to optimally adjust the frequency and load of the antenna has been studied. Furthermore, in order to improve the accuracy and responsiveness of compensation, the optimal frequency control direction, that is, whether the optimal frequency should be controlled to the high frequency side or the low frequency side is calculated from the differential value with respect to the frequency of the power transmission characteristic.
- the system is known. An example of such a control device is described in Patent Document 1, for example.
- Patent Document 1 discloses an adjustment system, method, and apparatus for an apparatus that wirelessly transmits power.
- this wireless power transmission device includes a transmission circuit having a transmission coil, and the transmission circuit wirelessly supplies power to a load.
- the transmission coil resonates at a predetermined resonance frequency.
- the transmission circuit has a circuit constant (reactance).
- This wireless power transmission device includes a detection circuit that detects a change in resonance frequency while power is supplied to a load, and the reactance can be adjusted based on the change in resonance frequency.
- FIG. 11 is a block diagram for explaining the concept of frequency control of wireless power transmission according to the related art.
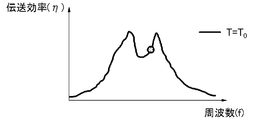
- FIG. 12A is a graph showing the transmission efficiency ( ⁇ ) of the wireless power transmission with respect to the frequency (f) in order to explain the related technique for optimally controlling the frequency characteristics of the wireless power transmission. showing the operation point in time T 0.
- FIG. 12B is a graph showing the transmission efficiency ( ⁇ ) of the wireless power transmission with respect to the frequency (f), and the points in the figure indicate operating points at time T 0 + T 11 .
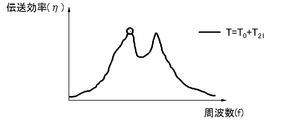
- FIG. 12C is a graph showing the transmission efficiency ( ⁇ ) of the wireless power transmission with respect to the frequency (f), and the points in the figure indicate operating points at time T 0 + T 21 .
- FIG. 12A to 12C show how the fluctuation of the resonance state is compensated. Specifically, it is as follows. First, EV is at time T 0, to stop in the vicinity of the power transmission antenna. The circles in FIG. 12A represent the operating point (operating frequency) at the current time. Next, the EV detects the current power transmission efficiency ⁇ out (the output terminal in FIG. 11) by a method such as monitoring of reflected power at the power transmitting antenna terminal and communication with the power receiving antenna. Subsequently, the detected ⁇ out is fed back (a feedback path from the output end to the input end in FIG. 11), and the control gain f ( ⁇ is determined by the difference from the target power transmission efficiency ⁇ cmd (input end in FIG. 11).
- f control for determining the direction of frequency control (high frequency direction or low frequency direction) is performed (f ( ⁇ ) and f control in FIG. 11).
- the frequency generation circuit performs frequency control based on the control gain and the direction of frequency control (f generation circuit in FIG. 11).
- the operating point (operating frequency) of the power transmission efficiency starts to change from the current value (FIG. 12B).
- the EV detects the power transmission efficiency ⁇ out again (output terminal in FIG. 11).
- the feedback loop for resetting the f control and the power transmission efficiency as described above is repeated.
- Such feedback control is the concept of control in FIG.
- the related control apparatus calculates the control direction of the optimal frequency from the differential value with respect to the frequency of the power transmission characteristic, and controls the frequency and the load according to the obtained result.
- the related control device has the following problems.
- helicopters, AUVs (Autonomous Underwater Vehicles), and moving people that are equipped with power transmission antennas and power reception antennas that constitute a wireless power transmission system are installed in related control devices.
- FIG. 13 is a diagram for explaining a change in transmission characteristics when environmental fluctuations occur regularly and irregularly in a wireless power transmission system. That is, in the wireless power transmission in water, the relationship between the frequency and the power transmission efficiency before (time T 0 ) and after the occurrence (time T 0 + T 22 ) of shaking of the moving body is shown.
- the solid line is the wireless power transmission characteristic at time T 0
- the broken line is the wireless power transmission characteristic at time T 0 + T 22 .
- FIG. 14A is a diagram illustrating the transmission efficiency ( ⁇ of wireless power transmission with respect to the current frequency (f) in order to explain the frequency control according to the related art when environmental fluctuation occurs in wireless power transmission (in the case of underwater).
- FIG. 14B is a graph showing the transmission efficiency ( ⁇ ) of the wireless power transmission with respect to the frequency (f) at the present time, and the points in the figure show the operating points at time T 0 + T 12 .
- FIG. 14C is a graph showing the transmission efficiency ( ⁇ ) (predicted value) at the time T 0 + T 12 of the wireless power transmission with respect to the frequency (f). The points in the figure indicate the operating points at the time T 0 + T 12 . Show. FIG.
- FIG. 14D is a graph showing the transmission efficiency ( ⁇ ) (predicted value) when the wireless power transmission should be redetermined with respect to the frequency (f), and the points in the figure indicate the operating points in the control direction to be redetermined. Show. First, it is controlled with a predetermined power transmission efficiency and frequency (FIG. 14A). Then, at time T 0 + T 12 , frequency control is started (FIG. 14B). Furthermore, when the moving body shakes at time T 0 + T 22 and the power transmission characteristics change (FIG. 14C), the power transmission characteristics are deteriorated when the direction of frequency control is maintained as it is. Become. Therefore, there arises a problem that the transmission efficiency is not improved.
- ⁇ predetermined power transmission efficiency and frequency
- the transmission efficiency does not improve even though the frequency follows the optimization direction calculated by the related control device.
- the direction of frequency control needs to be determined again as shown in FIG. 14D.
- the related control apparatus has a problem that it is difficult to perform follow-up control with respect to frequency and load fluctuations due to environmental fluctuations.
- the problems described above are problems that occur when an unmanned helicopter flying in the air or an AUV driven in water is used, that is, when the positional relationship between a power transmitting antenna and a power receiving antenna is constantly changing. This is because in the case of a mobile device such as an EV traveling on the ground, once the device stops, the positional relationship between the mobile device equipped with the power transmitting antenna and the power receiving antenna hardly changes.
- the object of the present invention is that it is difficult to stably supply power in a situation where fluctuations in the transmission environment occur in wireless power transmission, which is a problem described above, in a steady and irregular manner.
- An object of the present invention is to provide a wireless power transmission control device, a wireless power transmission system, and a wireless power transmission control method that solve the problems.
- the control apparatus for wireless power transmission includes a data collecting means for acquiring data indicating characteristics of a transmission medium when power is wirelessly transmitted via a power receiving antenna provided in a mobile body, and transmission using the data.
- Data prediction means for deriving predicted transmission characteristics that predict changes in the characteristics of the medium, calculating control parameters corresponding to the predicted transmission characteristics, parameter control means for controlling the mobile body and the power receiving antenna using the control parameters, Have
- the wireless power transmission control method of the present invention data indicating characteristics of a transmission medium when power is wirelessly transmitted via a power receiving antenna provided in a mobile body is acquired, and the characteristics of the transmission medium are obtained using the data.
- a predicted transmission characteristic in which a change is predicted is derived, a control parameter corresponding to the predicted transmission characteristic is calculated, and the mobile object and the power receiving antenna are controlled using the control parameter.
- a wireless power transmission system of the present invention includes a wireless power transmission control device and a mobile body including the reception antenna, and a power transmission device that wirelessly transmits power to the mobile body. Transmission information including a frequency of power transmission and a target value of power transmission efficiency is determined, and the mobile transmits the transmission information to the power transmission device.
- wireless power transmission can be controlled using control parameters corresponding to predicted future environmental changes.
- power can be stably supplied even in an environment such as air or water in which environmental fluctuations are continuously generated.
- FIG. 1 It is a block diagram which shows the structure of the control apparatus of the wireless power transmission concerning the 1st Embodiment of this invention. It is a figure for demonstrating the change of the transmission characteristic when the temperature fluctuation
- the transmission efficiency of wireless power transmission for the current frequency (f) ( ( ⁇ ) is a graph, and the points in the figure indicate operating points at time T 01 .
- FIG. 1 It is a block diagram which shows the structure of the control apparatus of the wireless power transmission concerning the 3rd Embodiment of this invention. It is a block diagram which shows the structure of the control apparatus of the wireless power transmission concerning the 4th Embodiment of this invention. It is a schematic diagram which shows the structure of the wireless power transmission system concerning the 5th Embodiment of this invention. It is a conceptual diagram which shows the characteristic of electric power transmission in case the distance between a power transmission antenna and a receiving antenna differs at the time of using a resonance system. It is a block diagram for demonstrating the concept of the frequency control of the wireless power transmission by related technology.
- FIG. 1 shows the structure of the control apparatus of the wireless power transmission concerning the 3rd Embodiment of this invention. It is a block diagram which shows the structure of the control apparatus of the wireless power transmission concerning the 4th Embodiment of this invention. It is a schematic diagram which shows the structure of the wireless power transmission system concerning the 5th Embodiment of this invention. It is a conceptual diagram
- FIG. 5 is a graph showing the transmission efficiency ( ⁇ ) of wireless power transmission with respect to frequency (f) in order to explain related technology for optimally controlling the frequency characteristics of wireless power transmission, and the points in the figure are operations at time T 0 .
- FIG. 5 is a graph showing the transmission efficiency ( ⁇ ) of the wireless power transmission with respect to the frequency (f) at the present time in order to explain the frequency control according to the related art when environmental fluctuations occur in the wireless power transmission,
- a point indicates an operating point at time T 0 .
- Is a graph showing a transmission efficiency of the wireless power transmission (eta) for the frequency (f) at the current time point in the figure shows the operating points at time T 0 + T 12,.
- a graph showing the transmission efficiency at time T 0 + T 12 of the wireless power transmission (eta) (predicted value) for the frequency (f) shows the operating points at time T 0 + T 22, the points in Fig.
- FIG. 1 is a block diagram showing the configuration of a control device 11 for wireless power transmission according to the first embodiment of the present invention.
- the control device 11 in this embodiment includes a data collection unit 12, a data prediction unit 13, and a parameter control unit 14.
- the control device 11 is mounted on a moving body such as an unmanned helicopter or AUV.
- a moving body such as an unmanned helicopter or AUV.
- the data collection unit 12 acquires data regarding environmental changes that occur in an environment where power is transmitted wirelessly.
- Environmental fluctuation refers to fluctuations of the moving body with time, such as the position and angle of the moving body, and the environmental temperature, dielectric constant, and permeability of the transmission medium around the moving body.
- the data collection unit 12 includes a sensor for measuring the state of the moving body and the state of the external environment of the moving body.
- the data prediction unit 13 predicts future environmental fluctuations from the data collected by the data collection unit 12.
- the parameter control unit 14 controls the moving body control unit 15 and the antenna control unit 16 based on the control parameter estimated by the data prediction unit 13. As a result, the position of the mobile body that receives power wirelessly and the power receiving antenna provided in the mobile body are controlled.
- the data collection unit 12 includes a gyro sensor, a temperature sensor, a pressure sensor, and the like, and peripheral circuits for driving these sensors.
- the data prediction unit 13 can be configured by a dedicated circuit for estimating a control parameter based on prediction, or a processor, a program, and the like, and a peripheral circuit for driving the processor, the program, and the like.
- the parameter control unit 14 includes a dedicated circuit for controlling one or both of the moving body control unit 15 and the antenna control unit 16, or a processor and a program, and a peripheral circuit for driving the processor and the program. Can be configured.
- the data collection part 12 measures the state of a moving body and the state of the external environment of a moving body using the above-mentioned sensor.
- the measured state information is converted into data and transmitted to the data prediction unit 13.
- the data prediction unit 13 receives the data sent from the data collection unit 12.
- the data prediction unit 13 estimates the future of environmental fluctuations using the received data.
- the data prediction unit 13 determines a control parameter corresponding to the estimated state of the external environment.
- the determined control parameter is converted into data and transmitted to the parameter control unit 14.
- the parameter control unit 14 receives the determined control parameter.
- the parameter control unit 14 controls the moving body control unit 15 and the antenna control unit 16 based on the control parameter.
- the data prediction unit 13 derives a predicted transmission characteristic in which a change in the characteristic of the transmission medium is predicted using data indicating the characteristic of the transmission medium, and calculates a control parameter corresponding to the predicted transmission characteristic.
- the data prediction unit 13 can estimate future environmental fluctuations using various methods as described below. For example, the data prediction unit 13 can estimate by plotting the acquired sensor data on the time axis and using an extrapolation method. Further, the data prediction unit 13 can estimate by plotting the acquired sensor data on the time axis and comparing it with the data table accumulated so far. Further, the data prediction unit 13 can perform estimation by performing Fourier transform on the acquired sensor data and monitoring fluctuations of each frequency component.
- the data prediction unit 13 can determine control parameters corresponding to the estimated future environmental fluctuations using various methods. For example, the data prediction unit 13 can determine an optimal control parameter using a full search method or a hill climbing method. Further, the data prediction unit 13 can use a genetic algorithm method. If the genetic algorithm method is used, the data prediction unit 13 can determine the control parameters with good convergence in a short search time even when there are many control parameters.
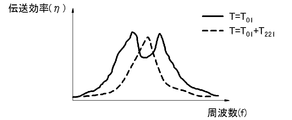
- FIG. 2 is a characteristic diagram showing the relationship between frequency and power transmission efficiency before (time T 01 ) and after occurrence (time T 01 + T 221 ) of seawater temperature fluctuation in wireless power transmission in seawater. It is.
- the solid line is the wireless power transmission characteristic at time T 01
- the broken line is the wireless power transmission characteristic at time T 01 + T 221 .
- FIG. 3A is a graph showing the transmission efficiency ( ⁇ ) of the wireless power transmission with respect to the frequency (f) at the present time, and the points in the figure show the operating points at time T 01 .
- the moving body is controlled at a predetermined power transmission efficiency and frequency at time T01 .
- temperature data collection in the data collection unit 12 and estimation of future temperature fluctuations in the data prediction unit 13 are started.
- various methods such as an extrapolation method and a method using Fourier transform can be used for estimating the temperature fluctuation.
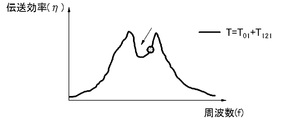
- a frequency control direction corresponding to the estimated future temperature fluctuation is determined (FIG. 3B). Control is determined in the direction of decreasing the frequency. Since it is determined in this way, the transmission efficiency is controlled to decrease at the present time as shown in FIG. 3B, but the transmission efficiency is increased with respect to the estimated future temperature fluctuation as shown in FIG. 3C. This is because the direction is controlled.
- the data prediction unit 13 determines a control parameter corresponding to the estimated future temperature fluctuation.
- the parameter control unit 14 starts control of the moving body control unit 15 and the antenna control unit 16 (FIG. 3C).
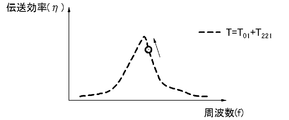
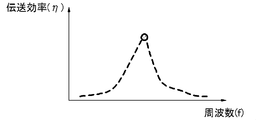
- the estimated temperature fluctuation actually occurs, and the power transmission characteristic changes from a solid line to a broken line in FIG. Then, even if the power transfer characteristic changes, the control parameter takes into account this change, so that the power transfer efficiency tends to improve.
- the control device 11 according to the present embodiment can supply power more stably and more efficiently even when environmental fluctuation occurs, which is difficult with the related art.
- a comparison and illustration are made so that the control by the control device 11 of the present embodiment converges.
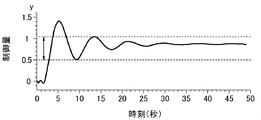
- FIG. 4A is a graph showing the fluctuation range of the controlled variable when the related technology is applied to explain the effect of frequency control when temperature fluctuation occurs in seawater with respect to wireless power transmission in seawater. It is.
- FIG. 4B illustrates the amount of fluctuation in the control amount when the technology of the present embodiment is applied to explain the effect of frequency control when temperature fluctuations occur in seawater with respect to wireless power transmission in seawater. It is the graph which showed. That is, FIGS. 4A and 4B are diagrams showing a comparison of control amounts when the control based on the predicted future temperature change is not performed (FIG. 4A) and when the control is performed (FIG. 4B).
- FIG. 4A shows a case in which this variation is compensated while maintaining a predetermined control function, and there is a case where the control function is rewritten and compensated at a time of 10 seconds based on a future temperature change predicted by the present embodiment. It is FIG. 4B. Then, in the case of FIG. 4B, it can be seen that the fluctuation range of the control amount is smaller than that in the case of FIG. 4A. Thus, when predictive control is performed, stable control is possible with little variation in the control amount.
- wireless power transmission can be controlled using control parameters corresponding to predicted future environmental fluctuations. As a result, there is an effect that power can be stably supplied even in an environment such as air or water in which environmental fluctuations are continuously generated.
- FIG. 5 is a block diagram showing the configuration of the control device 21 for wireless power transmission according to the second embodiment of the present invention.
- the data collection unit 22 according to the present embodiment includes a plurality of sensors such as a sensor 221, a sensor 222, and a sensor 223.
- the sensor 221 and the sensor 222 are temperature sensors
- the sensor 223 is a flow rate sensor.
- Other configurations of the control device 21 are the same as those in the first embodiment.
- the configuration of the data collection unit 22 will be described by taking the case of a temperature sensor and a flow rate sensor as an example, but the type of sensor is not limited to these.
- Various sensors such as a pressure sensor, a gyro sensor, a speedometer, a camera, and an acoustic sensor, and devices corresponding to the sensors can be used.
- control device 21 in this embodiment will be described in order.
- a case where it is used for wireless power transmission in seawater where temperature fluctuations occur regularly and irregularly will be described as an example, but the present invention is not limited to this.
- the data collection unit 22 measures the external temperature of the moving body 27 and the flow rate of seawater using a plurality of different sensors such as a temperature sensor and a flow rate sensor.
- the measured state information is converted into data and transmitted to the data prediction unit 23.
- the data prediction unit 23 receives the data sent from the data collection unit 22.
- the data prediction unit 23 estimates future environmental fluctuations using the received data.
- the data prediction unit 23 determines a control parameter corresponding to the estimated state of the external environment.
- the determined control parameter is converted into data and transmitted to the parameter control unit 24.
- the parameter control unit 24 receives the determined control parameter.
- the parameter control unit 24 controls the moving body control unit 25 and the antenna control unit 26 based on the control parameters.
- the data predicting unit 23 can estimate future environmental fluctuations with higher accuracy from the correlation of data related to a plurality of measured states of the external environment.
- FIG. 6 is a diagram for explaining the control operation in the wireless power transmission control device 21 according to the present embodiment.
- a sensor 221, a sensor 222, a sensor 223, and an antenna 203 are mounted on the moving body 27.
- the data prediction unit 23, the parameter control unit 24, the mobile body control unit 25, the antenna control unit 26, and the like are similarly mounted on the mobile body 27, but are not shown here.
- the sensors 221 and 222 are temperature sensors, and the sensor 223 is a flow rate sensor.
- the sensor 221 and the sensor 222 each measure the temperature at a certain time. At the same time, the sensor 223 measures the direction and magnitude of the flow velocity.
- Information of the sensors 221, 222, and 223 is converted into data and transmitted to the data prediction unit 23.
- the data prediction unit 23 calculates the current temperature distribution of the surrounding environment from the data of the sensors 221 and 222.
- a change in the temperature distribution around the antenna 203 can be predicted from the data of the sensor 223, that is, the direction and magnitude of the flow velocity. For example, when the distance between the sensor 221 and the antenna 203 is 1 m and the flow velocity is 1 m / s, it is predicted that the temperature measured by the sensor 221 is equal to the temperature distribution around the antenna 103 after 1 second. Can do. In this way, using multiple sensors with different physical quantities to measure, environmental information such as the current temperature distribution around the moving body and the flow velocity around the moving body is obtained, and the future temperature distribution around the moving body (environmental fluctuation) Is estimated. Then, a control parameter corresponding to the estimated state of the external environment is determined. The operations after the determination of the control parameter are the same as those in the first embodiment.
- wireless power transmission can be controlled using control parameters corresponding to predicted future environmental changes.
- control parameters corresponding to predicted future environmental changes.
- this embodiment it is possible to predict the future environment with higher accuracy by acquiring a plurality of data that fluctuates over time and predicting future environmental fluctuations from the correlation of the plurality of data. As a result, even in an environment where environmental fluctuations occur continuously, it is possible to supply power stably and with high accuracy.
- the method of predicting from the data of a single sensor according to the first embodiment described above can be used in combination with this embodiment using data acquired from a plurality of different sensors. This improves the accuracy of data prediction. Furthermore, in the present embodiment, it is possible to estimate a sudden temperature fluctuation caused by a sudden disturbance that was not easy to predict in the first embodiment. Predicting sudden fluctuations is difficult with methods using extrapolation or Fourier transform, but in this embodiment, future environmental fluctuations are estimated using the correlation of data acquired from multiple different sensors. Because it can be estimated, it can cope with sudden fluctuations.
- FIG. 7 is a block diagram showing the configuration of the control device 31 for wireless power transmission according to the third embodiment of the present invention.
- the difference between the configuration of the control device 21 according to the second embodiment shown in FIG. 5 and the configuration of the control device 31 shown in FIG. 7 is that a moving body control unit 35 and an antenna control unit 36 are included.
- the moving body control unit 35 includes a plurality of control units such as a posture control unit 351, a posture control unit 352, and a posture control unit 353.
- the posture control unit 351 controls the posture of the moving body with respect to the X axis
- the posture control unit 352 controls the posture of the moving body with respect to the Y axis
- the posture control unit 353 controls the posture of the moving body with respect to the Z axis.
- a mechanism for controlling is provided.
- the antenna control unit 36 includes a plurality of control units such as a load control unit 361 and a frequency control unit 362.
- the load control unit 361 includes a mechanism that controls the optimum load of the antenna
- the frequency control unit 362 includes a mechanism that controls the optimum frequency of the antenna.
- Other configurations of the control device 31 are the same as those of the second embodiment.
- control parameters will be described by taking as an example the case where the parameter control unit 34 controls the attitude of the moving body with respect to the X, Y and Z axes and the optimum load and frequency of the antenna. It is not limited to these. Different control parameters may be controlled.
- the data collection unit 32 measures the state such as the position and posture of the moving body and the state of the external environment of the moving body using one or a plurality of sensors.
- the measured state information of the external environment is converted into data and transmitted to the data prediction unit 33.
- the data prediction unit 33 receives the data sent from the data collection unit 32.
- the data prediction unit 33 estimates future environmental fluctuations using the received data.
- the data prediction unit 33 determines a control parameter corresponding to the estimated state of the external environment.
- the determined control parameter is converted into data and transmitted to the parameter control unit 34.
- the parameter control unit 34 receives the determined control parameter.
- the parameter control unit 34 controls the moving body control unit 35 and the antenna control unit 36 based on the control parameter.
- the moving body control unit 35 performs control by selecting one or a plurality of posture control units such as the posture control unit 351, the posture control unit 352, and the posture control unit 353.
- the antenna control unit 36 performs control by selecting one or a plurality of control units such as a load control unit 361 and a frequency control unit 362.
- the data predicting unit 33 performs predetermined control from a plurality of control parameters such as the attitude of the moving body with respect to the X, Y, and Z axes, the optimum load and frequency of the antenna, based on the estimated future environmental fluctuation. Select a parameter. For example, one or a plurality of control parameters that increase power transmission efficiency are selected, and the control parameters and control amounts are transmitted to the parameter control unit 34.
- the optimum load of the antenna can be adjusted by the inductance L and the capacitance C of the matching circuit connected to the antenna.
- the optimum frequency of the antenna can be controlled by a control voltage value V_VCO of a VCO (Voltage-Controlled Oscillator) that controls the frequency of power input to the antenna.
- V_VCO Voltage-Controlled Oscillator
- the data prediction unit 33 calculates the power transmission efficiency obtained when control is performed using any one or a plurality of these L, C, and V_VCO control parameters. Then, the data prediction unit 33 determines a control parameter that can obtain the optimum power transmission efficiency. As will be described later, the target values of the optimum frequency and the power transmission efficiency are fed back from the mobile body on the power reception side to the power transmission side.
- the data prediction unit 33 can use various methods to determine the above-described control parameters. For example, an optimal control parameter corresponding to the predicted environmental change may be determined based on a data table acquired in advance. In addition, after confirming the current situation based on measurement results at multiple different frequencies, the results for the predicted environmental fluctuations are calculated using an equivalent circuit analysis method, etc. Various control parameters may be determined.
- the data predicting unit 33 can determine the control parameter using various methods.
- the data prediction unit 33 can determine the optimal control parameter using, for example, a full search method or a hill climbing method. Further, the data prediction unit 33 can use a genetic algorithm method. If the genetic algorithm method is used, the data prediction unit 33 can determine the control parameters with good convergence in a short search time even when there are many control control parameters.
- any one of the parameters related to the position of the moving object such as the flying object and the AUV and the optimum frequency and optimum load of the power receiving antenna mounted on the moving object.
- a control parameter that increases power transmission efficiency is selected from one or a plurality of parameters.
- FIG. 8 is a block diagram showing the configuration of the control device 41 for wireless power transmission according to the fourth embodiment of the present invention.
- the difference between the configuration of the control device 21 according to the second embodiment shown in FIG. 5 and the configuration of the control device 41 shown in FIG. 8 is that a moving body control unit 45 and an antenna control unit 46 are included.
- the moving body control unit 45 includes a plurality of control units such as a posture control unit 451, a posture control unit 452, and a posture control unit 453.
- the posture control unit 451 controls the posture of the moving body 47 with respect to the X axis
- the posture control unit 452 controls the posture of the moving body 47 with respect to the Y axis
- the posture control unit 453 controls the Z axis of the moving body 47.
- the antenna control unit 46 includes a plurality of control units such as a load control unit 461 and a frequency control unit 462.
- the load control unit 461 includes a mechanism that controls the optimum load of the antenna
- the frequency control unit 462 includes a mechanism that controls the optimum frequency of the antenna.
- Other configurations of the control device 41 are the same as those of the second embodiment.
- control parameters will be described by taking as an example the case where the parameter control unit 44 controls the attitude of the moving body 47 with respect to the X, Y, and Z axes and the optimum load and frequency of the antenna. Is not limited to these. Different control parameters may be controlled.
- the data collection unit 42 measures the state such as the position and posture of the moving body 47 and the state of the external environment of the moving body 47 using one or a plurality of sensors.
- the measured state information of the external environment is converted into data and transmitted to the data prediction unit 43.
- the data prediction unit 43 receives the data sent from the data collection unit 42.
- the data prediction unit 43 estimates future environmental fluctuations using the received data.
- the data prediction unit 43 determines a control parameter corresponding to the estimated state of the external environment.
- the determined control parameter is converted into data and transmitted to the parameter control unit 44.
- the parameter control unit 44 receives the determined control parameter.
- the parameter control unit 44 controls the moving body control unit 45 and the antenna control unit 46 based on the control parameter.
- the moving body control unit 45 controls a plurality of posture control units such as the posture control unit 451, the posture control unit 452, and the posture control unit 453.
- the antenna control unit 46 controls a plurality of posture control units such as a load control unit 461 and a frequency control unit 462.
- the data predicting unit 43 selects a predetermined control parameter from a plurality of control parameters such as the attitude of the moving body 47 with respect to the X, Y, and Z axes, the optimum load and frequency of the antenna, and the like. Select control parameters. For example, the control parameter is selected such that the response speed is high and the power transmission efficiency is high, and the control parameter and the control amount are transmitted to the parameter control unit 44.
- the difference between the control parameters to be selected is the difference between the data prediction unit 33 according to the third embodiment and the data prediction unit 43 according to the present embodiment.
- the operation of the data prediction unit 43 is more specifically as follows.
- the optimum load of the antenna can be adjusted by L and C of the matching circuit connected to the antenna. Further, the optimum frequency of the antenna can be controlled by the control voltage value V_VCO of the VCO that controls the frequency of the power input to the antenna.
- the data prediction unit 43 calculates the power transmission efficiency and the required processing time obtained by using any one or more of these L, C, and V_VCO. Then, the data prediction unit 43 determines a control parameter that can obtain optimal power transmission efficiency and processing time.
- the data prediction unit 43 can determine the control parameter using various methods.
- the data prediction unit 43 can determine the optimal control parameter using, for example, a full search method or a hill climbing method.
- the data prediction unit 43 can also use a genetic algorithm method. If a genetic algorithm method is used, the data prediction unit 43 can determine the control parameter with good convergence in a short search time even when there are a large number of control parameters.
- one or more parameters of the parameters related to the position of the moving object such as the flying object and the AUV and the optimum frequency and optimum load of the power receiving antenna mounted on the moving object.
- the control parameter is selected from among the parameters so that the response speed is high and the power transmission efficiency is high. As a result, it is possible to supply power stably at high speed and with high efficiency even in an environment where the environment changes continuously, for example, in the air or underwater.
- FIG. 9 is a schematic diagram showing a configuration of a wireless power transmission system according to the fifth embodiment of the present invention.
- a moving body 57 such as a submersible craft operates in seawater and includes a control device 51, a power receiving antenna 503, and a moving body battery 504.
- the mother ship 50 floats on the sea and includes at least a power transmission antenna 502.
- each component will be described.
- the control device 51 includes a data collection unit 52, a data prediction unit 53, and a parameter control unit 54.
- the data collection unit 52 is a gyro sensor.
- the data prediction unit 53 and the parameter control unit 54 a processor equipped with a program for predicting future environmental fluctuations and controlling the mobile body and the power receiving antenna 503 provided in the mobile body can be used.
- the moving body control unit 55 is a motor that adjusts the position and posture of the submersible craft.
- the antenna control unit 56 is a motor that adjusts the posture of the power receiving antenna 503.
- the mobile battery 504 is a lithium ion secondary battery or the like.
- the mobile battery 504 is connected to the control device 51, the mobile control unit 55, and the antenna control unit 56, and is used to drive them.
- the moving body 57 which is a submersible craft includes various electronic devices (not shown) for exploring the seabed topography.
- the operation of the wireless power transmission system realized by the operation of the control device 51 and the operation of the mother ship 50 equipped with the power transmission antenna in this embodiment will be described.
- the position of the moving body 57 fluctuates due to tidal currents or buoyancy that occur in the sea as environmental fluctuations.
- the mother ship 50 is a large ship with little shaking, and it can be considered that position fluctuation hardly occurs at sea.
- the operation of the control device 51 that compensates for the variation and the stable wireless power transmission realized by the operation of the control device 51 will be described below.
- the mobile body 57 approaches the mother ship 50, and wireless power transmission from the power transmitting antenna 502 to the power receiving antenna 503 is started. Simultaneously with the start of power transmission, the start signal and information such as frequency or output used for wireless power transmission are transmitted from the mother ship 50 to the control device 51 by a submarine acoustic communication system (not shown).
- the gyro sensor that is the data collection unit 52 acquires the shaking information of the moving body 57.
- this shake information is transmitted to the data prediction unit 53.
- the data prediction unit 53 estimates future shaking information based on the shaking information and the current location information of the moving body 57.
- the present location of the moving body 57 can be accurately identified based on the position information at the time of landing and acceleration or speed information obtained by a gyro sensor or the like.
- control parameters that is, the adjustment angle of the power receiving antenna and the torque of the motor for adjusting the position of the submersible craft are determined. .
- these control parameters are transmitted to the parameter control unit 54.
- the parameter control unit 54 controls one or both of the moving body control unit 55 and the antenna control unit 56 based on the control parameter estimated by the data prediction unit 53. In this way, the position and orientation of the moving body 57 and the power receiving antenna 503 corresponding to future shaking information are adjusted.
- the data prediction unit 53 estimates a target value of the frequency and power transmission efficiency that will be optimal in the future based on the estimated future shake information and the information transmitted from the mother ship 50. Then, the transmission information including the optimum frequency and the target value of the power transmission efficiency is transmitted from the control device 51 to the mother ship 50 via the underwater acoustic communication system (not shown). In the mother ship 50, the frequency and transmission efficiency of the power output from the power transmission antenna 502 are controlled so that the transmitted target value is obtained. Thereafter, transmission information including actual values such as frequency or output used for wireless power transmission is transmitted from the mother ship 50 to the control device 51. The data predicting unit 53 uses the transmitted actual value as initial information when estimating a target value that will be optimal in the future. In this way, the series of operations are repeatedly executed in the wireless power transmission system while the target value and the actual value are transmitted to each other.
- FIG. 15 is a schematic diagram illustrating a configuration of a wireless power transmission system according to the present modification. Note that the wireless power transmission system of the present modification is the same as the configuration of the wireless power transmission system described in the fifth embodiment, and thus the description thereof is omitted.
- the operation of the wireless power transmission system realized by the operation of the control device 61 and the operation of the mother ship 60 equipped with the power transmission antenna in this modification will be described.
- the position of the moving body fluctuates due to tidal currents or buoyancy that occur in the sea as environmental fluctuations.
- the mother ship 60 is a large ship, has little shaking, and hardly changes in position at sea. Therefore, it is sufficient to consider the position variation on the moving body 67 side for the position variation between the power transmitting and receiving antennas.
- the operation of the control device 61 that compensates for the variation and the stable wireless power transmission realized by the operation of the control device 61 will be described below.
- the mobile body 67 approaches the mother ship 60, and wireless power transmission from the power transmitting antenna 602 to the power receiving antenna 603 is started. Simultaneously with the start of power transmission, the start signal and information such as frequency or output used for wireless power transmission are transmitted from the mother ship 60 to the control device 61 by a submarine acoustic communication system (not shown).
- the gyro sensor that is the data collection unit 62 acquires the shaking information of the moving body 67.
- this shaking information is transmitted to the data prediction unit 63.
- the data prediction unit 63 estimates future shaking information based on the shaking information and the current location information of the moving body 67.
- a method such as extrapolation or frequency analysis by Fourier transform is used to estimate future shake information.
- the shake information (x) predicted by the data prediction unit 63 is a function of time and is expressed by the following equation (1).
- x f (t) Expression (1) That is, the data prediction unit 63 estimates future shake information and creates a prediction function represented by the above formula (1).
- x is described as the relative distance between the power transmitting antenna and the power receiving antenna.
- x is not limited to this and is various parameters such as the conductivity and dielectric constant of the medium. May be.
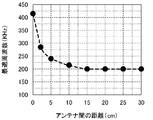
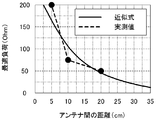
- FIG. 16A is a graph showing an example of the relationship between the distance between the power transmitting antenna and the power receiving antenna and the optimum frequency.
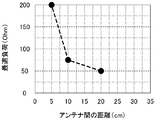
- FIG. 16B is a graph showing an example of the relationship between the distance between the power transmitting antenna and the power receiving antenna and the optimum load. As shown in FIGS.
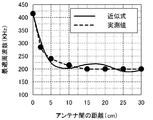
- FIG. 17A is a graph showing an approximate expression representing the relationship between the separation distance between the submarine wireless power feeding antennas and the optimum frequency.
- FIG. 17B is a graph showing an approximate expression representing the relationship between the separation distance between the submarine wireless power feeding antennas and the optimum load.
- the parameter control unit 64 controls the antenna control unit 66 based on the control parameter y estimated by the data prediction unit 63. In this way, the frequency and load adjustment corresponding to the future shake information x is performed. These series of operations are repeatedly executed while updating the current information.
- An example of the operation flow of the modified example of the fifth embodiment is shown in FIG.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Transmitters (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
Description
図1は、本発明の第1の実施形態にかかる無線電力伝送の制御装置11の構成を示すブロック図である。本実施形態における制御装置11は、データ収集部12、データ予測部13およびパラメータ制御部14を有する。この制御装置11は、無人ヘリコプターまたはAUV等である移動体に搭載される。以下、各構成要素について説明する。
次に、本実施形態による制御装置11の効果について説明する。例えば、本実施形態の制御装置11を海水中での無線電力伝送に適用した場合を考える。海水中では、海水の温度変動が定常的かつ不規則に発生することが想定される。海水の温度が変化すると、海水の導電率が変化する。海水の導電率が変化すると、送受電アンテナの負荷状態が変動する。そのため、無線電力伝送を安定に行うには、その変動分の補償が必要となる。なお、環境変動の一因として、海水の温度変動を例にして以下では説明するが、環境変動の要因はこれに限らない。移動体の位置や姿勢、周辺の伝送媒体の誘電率や透磁率等、様々な要因が変動した場合にも同様の制御が可能であり同様の効果が得られることは言うまでもない。
図5は、本発明の第2の実施形態にかかる無線電力伝送の制御装置21の構成を示すブロック図である。図1に示す制御装置11の構成と図5に示す制御装置21の構成との差異は、データ収集部22にある。すなわち、本実施形態のデータ収集部22は、センサ221、センサ222、センサ223等の複数のセンサから構成されている。具体的には例えば、センサ221およびセンサ222は温度センサで、センサ223は流速センサで構成されている。その他の制御装置21の構成は第1の実施形態と同一である。なお、データ収集部22の構成について、温度センサおよび流速センサの場合を例にして説明を進めていくが、センサの種類はこれらに限られない。圧力センサ、ジャイロセンサ、速度計、カメラ、音響センサ、等の種々のセンサおよびセンサに準ずる機器を用いることができる。
本実施形態によれば、予測された将来の環境変動に対応した制御パラメータを用いて無線電力伝送を制御することが可能となる。その結果、環境変動が連続して発生している空中や水中などの環境下であっても、安定して給電することができるという効果を奏する。
図7は、本発明の第3の実施形態にかかる無線電力伝送の制御装置31の構成を示すブロック図である。図5に示す第2の実施形態にかかる制御装置21の構成と図7に示す制御装置31の構成との差異は、移動体制御部35およびアンテナ制御部36を含む点にある。そして、移動体制御部35は、姿勢制御部351、姿勢制御部352、姿勢制御部353等の複数の制御部から構成されている。具体的には、姿勢制御部351は移動体のX軸に関する姿勢を制御し、姿勢制御部352は移動体のY軸に関する姿勢を制御し、姿勢制御部353は移動体のZ軸に関する姿勢を制御する機構を備える。また、アンテナ制御部36は、負荷制御部361、周波数制御部362等の複数の制御部から構成されている。具体的には、負荷制御部361はアンテナの最適負荷を制御する機構を備え、周波数制御部362はアンテナの最適周波数を制御する機構を備えている。その他の制御装置31の構成は第2の実施形態と同一である。なお、制御パラメータについて、パラメータ制御部34が、移動体のX、YおよびZ軸に関する姿勢並びにアンテナの最適負荷および周波数を制御する場合を例にして説明を進めていくが、制御パラメータの種類はこれらに限られない。異なる制御パラメータを制御対象としても良い。
本実施形態の制御装置31によれば、予測された将来の環境変動に対応した制御パラメータを用いて無線電力伝送を制御することが可能となる。その結果、環境変動が連続して発生している空中や水中などの環境下であっても、安定して給電することができるという効果を奏する。
図8は、本発明の第4の実施形態にかかる無線電力伝送の制御装置41の構成を示すブロック図である。図5に示す第2の実施形態にかかる制御装置21の構成と図8に示す制御装置41の構成との差異は、移動体制御部45およびアンテナ制御部46を含む点にある。そして、移動体制御部45は、姿勢制御部451、姿勢制御部452、姿勢制御部453等の複数の制御部から構成されている。
本実施形態の制御装置41によれば、予測された将来の環境変動に対応した制御パラメータを用いて無線電力伝送を制御することが可能となる。その結果、環境変動が連続して発生している空中や水中などの環境下であっても、安定して給電することができるという効果を奏する。
図9は、本発明の第5の実施形態にかかる無線電力伝送システムの構成を示す模式図である。まず、本実施形態の構成について説明する。潜水艇などである移動体57は、海水中で稼働し、制御装置51、受電アンテナ503および移動体バッテリー504を具備している。そして、母船50は、海上に浮かび、少なくとも送電アンテナ502を具備している。以下、各構成要素について説明する。
以上説明してきた動作によって、海中において移動体57の揺れが定常的かつ不規則に発生する環境下においても、その移動体57の揺れを予測して無線電力伝送を行うことができる。その結果、母船50から海水中の移動体57に安定的に無線電力伝送することが可能となる。本実施形態の無線電力伝送システムによれば、制御装置51が予測された将来の環境変動に対応した制御パラメータを用いて無線電力伝送を制御することができるので、移動体57への充電効率が向上する。その結果、充電に関わる時間を短くでき、海底地形探査効率を向上させることができるという効果を奏する。
次に、図15乃至図18を用いて、第5の実施形態の変形例について説明する。図15は、本変形例にかかる無線電力伝送システムの構成を示す模式図である。なお、本変形例の無線電力伝送システムは、上述の第5の実施形態に記載の無線電力伝送システムの構成と同一であるため、その説明を省略する。
すなわち、データ予測部63は、将来の揺れ情報を推定し、上記式(1)に表される予測関数を作成する。なお、本実施例においては、xを送電アンテナと受電アンテナの相対距離、として説明を行うが、xはこれに限定されるものではなく、媒質の導電率や誘電率等の種々のパラメータであっても良い。
y=g(x)=g(f(t))・・・式(2)
と表すことができる。この式を用いることで、予測したxに応じた最適な制御パラメータyを決定することができる。
12、22、32、42、52 データ収集部
13、23、33、43、53 データ予測部
14、24、34、44、54 パラメータ制御部
15、25、35、45、55 移動体制御部
16、26、36、46、56、66 アンテナ制御部
17、27、37、47、57 移動体
50 母船
221、222、223、321、322、323、421、422、423 センサ
351、352、353、451、452、453 姿勢制御部
361、461 負荷制御部
362、462 周波数制御部
503 受電アンテナ
502 送電アンテナ
504 移動体バッテリー
Claims (10)
- 移動体に備えられた受電アンテナを介して電力を無線で伝送する際の伝送媒体の特性を示すデータを取得するデータ収集手段と、
前記データを用いて前記伝送媒体の特性の変化を予測した予測伝送特性を導出し、前記予測伝送特性に対応した制御パラメータを算出するデータ予測手段と、
前記制御パラメータを用いて前記移動体および前記受電アンテナの制御を行うパラメータ制御手段と、を有する無線電力伝送の制御装置。 - 前記制御パラメータは、前記移動体の位置を定めるパラメータ、前記受電アンテナの周波数を定めるパラメータおよび前記受電アンテナの負荷を定めるパラメータを含む請求項1に記載の無線電力伝送の制御装置。
- 前記データ収集手段は、前記データを検出する複数のセンサを備え、
前記センサは、前記伝送媒体の異なる特性を検出する請求項1または2に記載の無線電力伝送の制御装置。 - 前記制御パラメータは、電力伝送効率を最適化するパラメータである請求項1から3のいずれか一項に記載の無線電力伝送の制御装置。
- 前記制御パラメータは、前記制御を行う際の応答速度が最適であるパラメータである請求項1から4のいずれか一項に記載の無線電力伝送の制御装置。
- 前記移動体の位置を制御する移動体制御手段をさらに備え、
前記移動体制御手段は、座標系の各軸に対応する複数の姿勢制御手段を含む請求項1から5のいずれか一項に記載の無線電力伝送の制御装置。 - 前記受電アンテナの制御を行うアンテナ制御手段をさらに備え、
前記アンテナ制御手段は、前記受動アンテナの負荷を制御する負荷制御手段と、
前記受動アンテナの周波数を制御する周波数制御手段と、を含む請求項1から6のいずれか一項に記載の無線電力伝送の制御装置。 - 前記伝送媒体は海水であり、前記特性は前記海水の温度、流速および圧力の少なくとも一つを含む請求項1から7のいずれか一項に記載の無線電力伝送の制御装置。
- 移動体に備えられた受電アンテナを介して電力を無線で伝送する際の伝送媒体の特性を示すデータを取得し、
前記データを用いて前記伝送媒体の特性の変化を予測した予測伝送特性を導出し、
前記予測伝送特性に対応した制御パラメータを算出し、
前記制御パラメータを用いて前記移動体および前記受電アンテナの制御を行う無線電力伝送の制御方法。 - 請求項1から8のいずれか一項に記載の無線電力伝送の制御装置および受電アンテナを備える移動体と、
前記移動体に電力を無線で送信する電力送信装置と、を含み、
前記無線電力伝送の制御装置は、無線電力伝送の周波数および電力伝送効率の目標値を含む伝送情報を決定し、
前記移動体は、前記伝送情報を前記電力送信装置に送信する無線電力伝送システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15743455.6A EP3101778B1 (en) | 2014-01-29 | 2015-01-15 | Wireless power transmission control device, wireless power transmission system, and wireless power transmission control method |
| US15/110,836 US9985482B2 (en) | 2014-01-29 | 2015-01-15 | Wireless power transmission control device, wireless power transmission system, and wireless power transmission control method |
| JP2015559798A JP6763143B2 (ja) | 2014-01-29 | 2015-01-15 | 無線電力伝送の制御装置、無線電力伝送システムおよび無線電力伝送の制御方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014013892 | 2014-01-29 | ||
| JP2014-013892 | 2014-01-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015115041A1 true WO2015115041A1 (ja) | 2015-08-06 |
Family
ID=53756628
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/000162 WO2015115041A1 (ja) | 2014-01-29 | 2015-01-15 | 無線電力伝送の制御装置、無線電力伝送システムおよび無線電力伝送の制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9985482B2 (ja) |
| EP (1) | EP3101778B1 (ja) |
| JP (1) | JP6763143B2 (ja) |
| WO (1) | WO2015115041A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018078773A (ja) * | 2016-11-11 | 2018-05-17 | 日立Geニュークリア・エナジー株式会社 | 無線給電装置、及び無線給電方法 |
| JP7516055B2 (ja) | 2020-01-29 | 2024-07-16 | キヤノン株式会社 | 撮像装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10523033B2 (en) * | 2015-09-15 | 2019-12-31 | Energous Corporation | Receiver devices configured to determine location within a transmission field |
| US10291071B2 (en) * | 2016-01-19 | 2019-05-14 | The United States Of America As Represented By The Secretary Of The Navy | Wireless power and data transfer for unmanned vehicles |
| WO2017131531A1 (en) * | 2016-01-26 | 2017-08-03 | Powerbyproxi Limited | Inductive power transfer |
| CN106505748B (zh) * | 2016-12-22 | 2019-08-02 | 武汉大学 | 无人机机载储能反向无线供电系统及供电方法 |
| KR20230081894A (ko) * | 2021-11-30 | 2023-06-08 | 현대모비스 주식회사 | 도심 항공 모빌리티를 위한 무선 충전 방법 및 그를 위한 장치 및 시스템 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012145327A1 (en) | 2011-04-19 | 2012-10-26 | Qualcomm Incorporated | Wireless power transmitter tuning |
| WO2013085030A1 (ja) * | 2011-12-07 | 2013-06-13 | 株式会社Ihi | 電力伝送システム |
| JP2013219972A (ja) * | 2012-04-11 | 2013-10-24 | Ihi Corp | 水中電力供給システム |
| JP2015056954A (ja) * | 2013-09-11 | 2015-03-23 | シャープ株式会社 | 充電回路 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8819574D0 (en) * | 1988-08-17 | 1988-09-21 | Britoil Plc | Fibre optic data coupler |
| JP4885788B2 (ja) * | 2007-05-10 | 2012-02-29 | オリンパス株式会社 | 無線給電システム |
| JP5334470B2 (ja) * | 2008-06-30 | 2013-11-06 | 三井造船株式会社 | 非接触式の船舶用給電システム、船舶及び船舶への給電方法 |
| US8212414B2 (en) * | 2008-07-10 | 2012-07-03 | Lockheed Martin Corporation | Resonant, contactless radio frequency power coupling |
| JP5481091B2 (ja) * | 2009-04-14 | 2014-04-23 | 富士通テン株式会社 | 無線電力伝送装置および無線電力伝送方法 |
| JP2011097819A (ja) * | 2009-05-20 | 2011-05-12 | Akio Saji | 無燃料蓄電システム及び装置(素子)並びに方法、無燃料電流増幅装置(素子)及び無燃料電流増幅方法、微少電流蓄電装置(素子)及び方法、並びに無燃料可動電子機器若しくは機器及び方法 |
| JP5656606B2 (ja) * | 2010-12-16 | 2015-01-21 | 株式会社テクノバ | 電力供給装置 |
| US9246349B2 (en) * | 2010-12-27 | 2016-01-26 | Golba Llc | Method and system for wireless battery charging utilizing ultrasonic transducer array based beamforming |
| JP2012191721A (ja) * | 2011-03-09 | 2012-10-04 | Fujitsu Ten Ltd | 無線電力伝送装置及び無線電力伝送方法 |
| JP2012222975A (ja) * | 2011-04-11 | 2012-11-12 | Toyota Industries Corp | 給電装置搭載車両 |
| JP5338851B2 (ja) * | 2011-05-23 | 2013-11-13 | 株式会社デンソー | 車両用電力送受電システム |
| US9831920B2 (en) * | 2011-05-27 | 2017-11-28 | uBeam Inc. | Motion prediction for wireless power transfer |
| US9391461B2 (en) * | 2011-05-31 | 2016-07-12 | Samsung Electronics Co., Ltd. | Wireless power transmission and charging system, and power control method of wireless power transmission and charging system |
| DE112012003140T5 (de) * | 2011-07-28 | 2014-06-26 | Honda Motor Co., Ltd. | Drahtloses Energieübertragungsverfahren |
| WO2013059441A1 (en) * | 2011-10-18 | 2013-04-25 | Witricity Corporation | Wireless energy transfer for photovoltaic panels |
| KR101933461B1 (ko) * | 2012-07-10 | 2018-12-31 | 삼성전자주식회사 | 무선 전력 송신기 및 그 제어 방법과, 무선 전력 송신기의 부하 값에 대한 온도 보상 방법 |
| JP6277585B2 (ja) * | 2013-02-04 | 2018-02-14 | 株式会社Ihi | 非接触給電システム |
-
2015
- 2015-01-15 EP EP15743455.6A patent/EP3101778B1/en active Active
- 2015-01-15 JP JP2015559798A patent/JP6763143B2/ja active Active
- 2015-01-15 WO PCT/JP2015/000162 patent/WO2015115041A1/ja active Application Filing
- 2015-01-15 US US15/110,836 patent/US9985482B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012145327A1 (en) | 2011-04-19 | 2012-10-26 | Qualcomm Incorporated | Wireless power transmitter tuning |
| WO2013085030A1 (ja) * | 2011-12-07 | 2013-06-13 | 株式会社Ihi | 電力伝送システム |
| JP2013219972A (ja) * | 2012-04-11 | 2013-10-24 | Ihi Corp | 水中電力供給システム |
| JP2015056954A (ja) * | 2013-09-11 | 2015-03-23 | シャープ株式会社 | 充電回路 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3101778A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018078773A (ja) * | 2016-11-11 | 2018-05-17 | 日立Geニュークリア・エナジー株式会社 | 無線給電装置、及び無線給電方法 |
| JP7516055B2 (ja) | 2020-01-29 | 2024-07-16 | キヤノン株式会社 | 撮像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6763143B2 (ja) | 2020-09-30 |
| US9985482B2 (en) | 2018-05-29 |
| JPWO2015115041A1 (ja) | 2017-03-23 |
| EP3101778A1 (en) | 2016-12-07 |
| EP3101778A4 (en) | 2017-06-21 |
| US20160336805A1 (en) | 2016-11-17 |
| EP3101778B1 (en) | 2020-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015115041A1 (ja) | 無線電力伝送の制御装置、無線電力伝送システムおよび無線電力伝送の制御方法 | |
| EP3164741B1 (en) | Method and system for dynamic positioning of instrumented cable towed in water | |
| TW201802488A (zh) | 無人自主運載工具的磁場導航 | |
| US10852364B2 (en) | Interference mitigation in magnetometers | |
| CN113052964A (zh) | 用于基于加速度的向量场地图的系统和方法 | |
| JP6004873B2 (ja) | 航空機のアンテナ制御装置、航空機、航空機のアンテナ選択プログラム、及び航空機のアンテナ制御方法 | |
| CN102709993A (zh) | 一种用于水下无线充电系统的激光对准装置及方法 | |
| US10082800B2 (en) | Method for stabilizing mission equipment using unmanned aerial vehicle command and posture information | |
| JP6919033B2 (ja) | 送電装置 | |
| CN109946976B (zh) | 一种宽航速auv运动控制方法 | |
| US20230388812A1 (en) | Learning method, wireless quality estimation method, learning device, wireless quality estimation device, and program | |
| CN114578835B (zh) | 一种水下航行器无线充电系统及其控制方法 | |
| CN116388414A (zh) | 基于粒子群算法的岸电船舶无线充电优化方法、装置、介质及无线充电系统 | |
| CN117970248A (zh) | 基于伴随式声信标辅助的水下航行器协同导航定位方法 | |
| CN114172243B (zh) | 基于gpi控制器的水下航行器无线充电系统及控制方法 | |
| CN114649873A (zh) | 基于耦合系数提升的水下航行器无线充电系统及控制方法 | |
| Moridian et al. | A low-cost mobile infrastructure for multi-AUV networking | |
| Chen et al. | Path planning of underwater terrain-aided navigation based on improved artificial potential field method | |
| JP2004226374A (ja) | 位置計測システム、位置計測方法、プログラム及び航走体運用システム | |
| Safaei et al. | Velocity estimation for UAVs using ultra wide-band system | |
| Rahmati et al. | Compressed underwater acoustic communications for dynamic interaction with underwater vehicles | |
| Prasser et al. | Sensor network based auv localisation | |
| JP2024048208A (ja) | 無線電力伝送システム、給電ステーションおよび無線給電プログラム | |
| Matsuda et al. | State estimation of multiple AUVs with limited communication traffic | |
| JP2013035373A (ja) | 曳航体の制御方法及びその制御装置、並びに曳航体の制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15743455 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015559798 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15110836 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015743455 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015743455 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |