WO2014017527A1 - Actuator - Google Patents
Actuator Download PDFInfo
- Publication number
- WO2014017527A1 WO2014017527A1 PCT/JP2013/070017 JP2013070017W WO2014017527A1 WO 2014017527 A1 WO2014017527 A1 WO 2014017527A1 JP 2013070017 W JP2013070017 W JP 2013070017W WO 2014017527 A1 WO2014017527 A1 WO 2014017527A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- drive shaft
- conversion member
- actuator
- fixed
- drive
- Prior art date
Links
- 238000006243 chemical reaction Methods 0.000 claims abstract description 103
- 238000006073 displacement reaction Methods 0.000 claims abstract description 39
- 230000008602 contraction Effects 0.000 claims description 11
- 229910052751 metal Inorganic materials 0.000 claims description 9
- 239000002184 metal Substances 0.000 claims description 9
- 238000003825 pressing Methods 0.000 claims description 5
- 238000005549 size reduction Methods 0.000 abstract description 3
- 239000011347 resin Substances 0.000 description 10
- 229920005989 resin Polymers 0.000 description 10
- 239000012790 adhesive layer Substances 0.000 description 9
- 239000000919 ceramic Substances 0.000 description 7
- 238000000034 method Methods 0.000 description 7
- 230000002093 peripheral effect Effects 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 239000000853 adhesive Substances 0.000 description 4
- 230000001070 adhesive effect Effects 0.000 description 4
- 238000005452 bending Methods 0.000 description 4
- 238000005304 joining Methods 0.000 description 4
- 239000010410 layer Substances 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000005484 gravity Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 229910001369 Brass Inorganic materials 0.000 description 1
- 229910000906 Bronze Inorganic materials 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910001252 Pd alloy Inorganic materials 0.000 description 1
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- DMFGNRRURHSENX-UHFFFAOYSA-N beryllium copper Chemical compound [Be].[Cu] DMFGNRRURHSENX-UHFFFAOYSA-N 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 239000010974 bronze Substances 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- KUNSUQLRTQLHQQ-UHFFFAOYSA-N copper tin Chemical compound [Cu].[Sn] KUNSUQLRTQLHQQ-UHFFFAOYSA-N 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- UGKDIUIOSMUOAW-UHFFFAOYSA-N iron nickel Chemical compound [Fe].[Ni] UGKDIUIOSMUOAW-UHFFFAOYSA-N 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- BITYAPCSNKJESK-UHFFFAOYSA-N potassiosodium Chemical compound [Na].[K] BITYAPCSNKJESK-UHFFFAOYSA-N 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/021—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors using intermittent driving, e.g. step motors, piezoleg motors
- H02N2/025—Inertial sliding motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/04—Constructional details
- H02N2/043—Mechanical transmission means, e.g. for stroke amplification
Definitions
- the present invention relates to an actuator that converts a force due to expansion / contraction of a drive element into a force in a direction different from the expansion / contraction direction and displaces the drive shaft along a direction different from the expansion / contraction direction.
- an actuator using a piezoelectric element is known as a small actuator.
- Examples of actuators using piezoelectric elements are described in Patent Documents 1 and 2 below.
- the actuator described in Patent Document 1 when the electromechanical conversion element expands and contracts in the length direction, the drive friction member connected to the end portion in the length direction of the electromechanical conversion element vibrates in the length direction.
- the engagement member engaged with the drive friction member moves relative to the drive friction member in the length direction with the vibration in the length direction of the drive friction member. Therefore, in the actuator described in Patent Document 1, the expansion / contraction direction of the electromechanical conversion element is parallel to the moving direction of the engagement member, that is, the driving force generation direction.
- Patent Document 2 discloses an actuator provided with a mechanism for changing the direction of the driving force.
- the actuator 100 includes a plate-like shaft fixing member 102, a pair of diaphragms 103 a and 103 b, a substrate 104, and a shaft 101.
- One end of the shaft 101 is joined to the shaft fixing member 102.
- a pair of diaphragms 103 a and 103 b are provided integrally with the shaft fixing member 102.
- the upper ends of the diaphragms 103 a and 103 b support both end portions of the shaft fixing member 102.
- the ends of the vibration plates 103a and 103b opposite to the shaft fixing member 102 are fixed to the substrate 104.
- Piezoelectric elements 105a and 105b are fixed to the diaphragms 103a and 103b. As the piezoelectric elements 105a and 105b expand and contract, the diaphragms 103a and 103b are bent and deformed. As a result, the direction of the driving force generated from the piezoelectric elements 105a and 105b is changed, and the shaft fixing member 102 is displaced by vibration. As a result, the shaft 101 vibrates and the engagement member 106 is driven.
- Patent Document 3 discloses an actuator in which a rod is coupled to one end side in the vibration direction of a piezo element.
- a counter balance is coupled to the other end side in the vibration direction of the piezo element.
- the coupling between the piezo element and the rod is performed as follows. That is, a core rod is inserted in the center of the piezo element. One end of the core bar protrudes from the piezo element. The protruding part of the core rod is inserted into the rod and fixed.
- the core rod directly transmits the expansion and contraction of the piezo element to the rod. Therefore, in order to obtain a sufficient driving force, the counter balance must be connected to the piezo element. Therefore, miniaturization is still difficult.
- An object of the present invention is to provide an actuator that can be further miniaturized.
- the actuator according to the present invention includes a drive element, a conversion member, and a drive shaft.
- the drive element has first and second end faces that face each other in the first direction, and first and second side faces that face each other in a second direction perpendicular to the first direction.
- the drive element expands and contracts along the first direction.
- the conversion member has a displacement portion, a first portion, a second portion, a third portion, a fourth portion, and a fifth portion.
- the displacement unit converts the expansion / contraction force along the first direction of the drive element into a drive force along the second direction, and is displaced along the second direction by the drive force.
- the first portion has a convex portion that is located on the first side surface and includes the displacement portion that is spaced apart from the first side surface.
- the second part is connected to the first part and is in contact with the first end face.
- the third portion is connected to the first portion and is in contact with the second end surface.
- the fourth portion is connected to the second portion and is fixed to the second side surface.
- the fifth portion is connected to the third portion and is fixed to the second side surface.
- the conversion member has elasticity.
- the drive shaft has one end fixed to the first portion of the conversion member and extends in the second direction.
- the drive shaft is fixed to the first portion so that one of the drive shaft and the first portion of the conversion member fits into the recess provided on the other.
- contact includes not only direct contact but also indirectly contact. That is, “contact” means that there is no gap between the members.
- the recess is a hole provided in a surface to which the drive shaft of the first portion of the conversion member is fixed, and one end side of the drive shaft is inserted into the hole so that the drive shaft is It fits in the hole.
- the recess is a hole opened at one end of the drive shaft, and a protrusion is provided on a surface to which the drive shaft of the first portion of the conversion member is fixed.
- the drive shaft is fixed to the first portion so that the protrusion fits into the hole.
- the protrusion is provided integrally with the drive shaft.
- the number of parts can be reduced and the assembly process can be simplified. Further, the drive shaft is hardly detached from the conversion member.
- the conversion member is formed of a pressed member formed by pressing a metal plate. Therefore, the cost of the actuator can be reduced.
- the conversion member and the drive shaft are formed by pressing a single metal plate. Therefore, the cost of the actuator can be reduced.
- the actuator of the present invention since the drive shaft and the conversion member are configured as described above, the actuator can be downsized.
- the drive shaft is fixed to the first portion of the conversion member so that one of the drive shaft and the first portion of the conversion member fits into the recess provided in the other, the drive The shaft is fixed to the conversion member with high accuracy. Accordingly, it is possible to further reduce the size of the actuator without impairing the displacement stability.
- FIG. 1A is a schematic perspective view of an actuator according to the first embodiment of the present invention
- FIG. 1B is a drive shaft conversion member in the actuator according to the first embodiment of the present invention.
- It is a perspective view which shows the fixing structure with respect to.
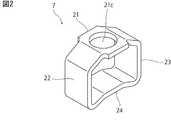
- FIG. 2 is a perspective view of a conversion member used in the actuator according to the first embodiment of the present invention.
- FIG. 3 is a partial cross-sectional perspective view of the fixing structure shown in FIG.
- FIG. 4 is a schematic side view of the drive device including the actuator according to the first embodiment of the present invention.
- FIG. 5 is a side view of the piezoelectric element and the conversion member used in the actuator according to the first embodiment of the present invention.
- FIG. 6A is a perspective view showing a fixing structure of the drive shaft to the conversion member in the actuator according to the second embodiment of the present invention
- FIG. 6B is a partial cross-sectional perspective view thereof.
- FIG. 7 is a perspective view of a conversion member used in the actuator according to the second embodiment of the present invention.
- FIG. 8A is a perspective view showing a structure for fixing a drive shaft to a conversion member in an actuator according to a third embodiment of the present invention, and FIG. 8B is a partial sectional perspective view thereof.
- FIG. 9 is a perspective view of a conversion member used in the actuator according to the third embodiment of the present invention.
- FIG. 10A is a perspective view of a conversion member used in an actuator according to the fourth embodiment of the present invention, and FIG.
- FIG. 10B is a diagram of the actuator according to the fourth embodiment of the present invention. It is a perspective view which shows the fixation structure with respect to the conversion member of a drive shaft.
- FIG. 11 is a schematic perspective view of an actuator according to a modification of the present invention.
- FIG. 12 is a perspective view showing a conversion member prepared in a modification of the present invention.
- FIG. 13 is a front sectional view for explaining an example of a conventional actuator.
- FIG. 1A is a schematic perspective view of the actuator 3 according to the first embodiment of the present invention.
- FIG. 4 is a schematic side view of the drive device 1 including the actuator 3 according to the first embodiment of the present invention.
- the drive device 1 includes a control unit 2 and an actuator 3.
- the control unit 2 is a part that controls the actuator 3. Specifically, the control unit 2 controls the voltage applied to the piezoelectric element 10 as a driving element of the actuator 3 described later.
- the piezoelectric element 10 is preferably a laminated piezoelectric ceramic element having electrodes laminated inside through piezoelectric ceramics. This is because the voltage applied to the piezoelectric element 10 can be lowered and a large amount of displacement can be obtained. In addition, since the piezoelectric ceramic has a relatively high rigidity and can reduce attenuation in high-frequency vibrations, the resonance frequency of the displacement member can be increased by using a driving element using the piezoelectric ceramic.
- the drive element is not limited to a piezoelectric element.
- the driving element may be an electrostrictive element, a magnetostrictive element, a thermal deformation element, or a linear motor using electromagnetic force or electrostatic force.
- the actuator 3 includes a driving member 4 and a driven member 5.
- the driving member 4 drives the driven member 5.
- the drive member 4 moves the driven member 5 in the z direction by the displacement of the drive shaft 6 described later.
- the z direction is a displacement direction of the drive shaft 6, that is, a position conversion direction.
- the driven member 5 is drawn in a rectangular plate shape, but the driven member is not limited to this.
- the driven member that is a driving object may be any member, for example, a single lens or a combination lens group, an image sensor, an aperture mechanism, an optical mirror, a laser light emitting element, a magnetic head, and various sensors. An element etc. may be sufficient.
- the drive member 4 includes a drive shaft 6 extending along the z direction, a conversion member 7, and a piezoelectric element 10 as a drive element.
- the drive shaft 6 is inserted into a through hole 5 a provided in the driven member 5.
- the drive shaft 6 is preferably formed of a material having a small specific gravity such as carbon.
- the driven member 5 and the drive shaft 6 have a small mutual friction.
- a pressurizing mechanism such as a spring.
- the one end 6 a in the z direction of the drive shaft 6 is fixed to the conversion member 7.
- the conversion member 7 is a member for displacing the drive shaft 6 along the z direction.
- the one end 6a of the drive shaft 6 can be easily and accurately fixed to the conversion member 7 without impairing the displacement of the drive shaft 6. This will be clarified by detailing the fixing structure later.
- the direction in which the piezoelectric element 10 expands and contracts is the x direction perpendicular to the z direction.
- the piezoelectric element 10 is formed in a prismatic shape.
- the “rectangular column shape” includes a shape in which at least a part of a corner portion or a ridge line portion is chamfered or R chamfered.
- the rectangular column shape includes a rectangular parallelepiped shape.
- the piezoelectric element 10 has first and second end faces 10a and 10b, and first to fourth side faces 10c to 10f.
- Each of the first and second end faces 10a and 10b extends along the y direction and the z direction perpendicular to the z direction and the x direction, respectively.
- the first and second end faces 10a and 10b are opposed to each other in the x direction.
- Each of the first and second side faces 10c, 10d extends along the x direction and the y direction.
- the first and second side surfaces 10c and 10d are opposed to each other in the z direction.
- Each of the third and fourth side surfaces 10e and 10f extends along the x direction and the z direction.
- the third and fourth side surfaces 10e and 10f are opposed to each other in the y direction.
- FIG. 5 is a side view of the piezoelectric element 10 and the conversion member 7 used in the actuator 3 according to the first embodiment of the present invention.
- the piezoelectric element 10 includes a plurality of pairs of first and second electrodes 12 and 13 that face each other in the x direction via the piezoelectric layer 11. By applying a voltage between the first and second electrodes 12 and 13, the piezoelectric element 10 can be expanded and contracted in the x direction.
- first and second electrodes it is not always necessary to provide a plurality of pairs of the first and second electrodes. Only a pair of the first and second electrodes may be provided. Further, the opposing direction of the first and second electrodes is not limited to the x direction which is the expansion / contraction direction. Depending on the polarization direction of the piezoelectric body, the first and second electrodes may be provided so as to face each other in the z direction or the y direction.
- the material of the piezoelectric layer 11 and the first and second electrodes 12 and 13 is not particularly limited.
- the piezoelectric layer 11 is made of, for example, lead-free piezoelectric ceramics such as lead zirconate titanate ceramics (PZT), alkaline niobate ceramics such as potassium sodium niobate, or piezoelectric single crystals such as lithium tantalate. It can be formed of a piezoelectric body.
- the first and second electrodes 12 and 13 can be formed of, for example, a metal such as Ag, Cu, or Pt, or an alloy such as an Ag—Pd alloy.
- the conversion member 7 includes a metal such as iron, copper and nickel, and an elastic body represented by an alloy such as stainless steel, 42 nickel iron, beryllium copper, phosphor bronze and brass.
- the conversion member 7 converts the direction of the driving force so that the driving force due to expansion and contraction along the x direction of the piezoelectric element 10 becomes the driving force along the z direction, and the driving shaft is converted by the converted driving force in the direction. 6 is an element that displaces along the z direction.
- the driving direction of the piezoelectric element 10 and the direction in which the driving force of the piezoelectric element 10 is converted by the conversion member 7 are not necessarily perpendicular. In this embodiment, the x direction and the z direction are perpendicular to each other, but the x direction and the z direction are not necessarily perpendicular to each other.
- the conversion member 7 has an annular shape having first to seventh portions 21 to 27.
- the piezoelectric element 10 is fitted with the annular conversion member 7.
- the first to seventh portions 21 to 27 are integrally formed. That is, the conversion member 7 is annular.
- the piezoelectric element 10 can be vibrated in the vicinity of the resonance frequency of the portion composed of the conversion member 7 and the piezoelectric element 10, so that it can be driven with less input energy.
- the conversion member 7 may be comprised by the single member, and may be comprised by joining a some member.
- the first portion 21 is located on the first side surface 10c. That is, the first portion 21 is located on the z1 side in the z direction of the first side surface 10c.
- the first portion 21 has a convex portion 21a. In the present embodiment, the entire first portion 21 is constituted by the convex portion 21a.
- the convex portion 21a is separated from the first side surface 10c.
- the convex portion 21a protrudes from the first side surface 10c to the z1 side in the z direction.
- the drive shaft 6 is attached to the top of the convex portion 21a. A method for attaching the drive shaft 6 to the convex portion 21a is not particularly limited.
- the drive shaft 6 may be attached to the convex portion 21 a using a resin adhesive, or may be integrally formed of the same material as the conversion member 7.
- the cross-sectional shape of the drive shaft 6 can be an appropriate shape such as a circle, various polygons, or various combinations.
- the cross-sectional shape and dimensions of the drive shaft 6 are preferably substantially the same along the z direction.
- the second portion 22 has a flat plate shape.
- the second portion 22 is located on the first end face 10a. That is, the second portion 22 is located on the x1 side in the x direction of the first end face 10a.
- the end of the second portion 22 on the z-direction z2 side reaches the z2 side from the second side surface 10d.
- the second portion 22 is in contact with the first end face 10a.
- substantially the entire first end surface 10 a is in contact with the second portion 22.
- the second portion 22 and the first end surface 10 a are bonded by the resin adhesive layer 31 and are in contact with each other via the resin adhesive layer 31.
- drawing of the resin adhesive layer 31 and the resin adhesive layers 32 and 33 described later is omitted.
- the third portion 23 has a flat plate shape.
- the third portion 23 is located on the second end face 10b. That is, the third portion 23 is located on the x2 side in the x direction of the second end face 10b.
- the end of the third portion 23 on the z-direction z2 side is closer to the z2 side than the second side surface 10d.
- the third portion 23 is in contact with the second end face 10b.
- substantially the entire second end surface 10 b is in contact with the third portion 23.
- the third portion 23 and the second end surface 10 b are bonded by the resin adhesive layer 32 and are in contact with each other via the resin adhesive layer 32.
- the fourth portion 24 is indirectly connected to the second portion 22.
- the fourth portion 24 is located on the second side surface 10d. That is, the fourth portion 24 is located on the z2 side in the z direction of the second side surface 10d.
- the fifth portion 25 is indirectly connected to the third portion 23.
- the fifth portion 25 is located on the second side surface 10d. That is, the fifth portion 25 is located on the z2 side in the z direction of the second side surface 10d.
- the fourth and fifth portions 24 and 25 are integrally formed.
- the fourth and fifth portions 24 and 25 are fixed by being bonded to the second side surface 10d by the resin adhesive layer 33.
- substantially the entire second side surface 10 d is fixed to the fourth and fifth portions 24 and 25 by the resin adhesive layer 33.
- the second part 22 and the fourth part 24 are connected by a sixth part 26.
- the sixth portion 26 is located on the end edge of the second side surface 10d on the first end surface 10a side. That is, the sixth portion 26 is located on the z-direction z2 side of the ridge line portion formed by the second side surface 10d and the first end surface 10a.
- the sixth portion 26 is provided apart from the second side surface 10d.
- the third part 23 and the fifth part 25 are connected by a seventh part 27.
- the seventh portion 27 is located on the end edge of the second side surface 10d on the second end surface 10b side. That is, the seventh portion 27 is located on the z direction z2 side of the ridge line portion constituted by the second side surface 10d and the second end surface 10b.
- the seventh portion 27 is provided apart from the second side surface 10d.
- the present invention is not limited to this configuration.
- the conversion member may be provided such that the ridge line portion between the first or second end surface and the first side surface does not contact the conversion member. That is, the second and third portions 22 and 23 may be provided so as not to contact the ridge line portion between the first or second end face 10a or 10b and the first side face 10c.
- the thickness t of the plate-like conversion member 7 when the yz section of the piezoelectric element 10 is about 1 mm is It is preferably about 0.1 mm to 0.25 mm.
- the Young's modulus of the conversion member 7 is preferably 100 GPa or more because the resonance frequency of the displacement member can be increased and the vibration attenuation can be reduced.
- the preferable upper limit of the Young's modulus of the conversion member 7 is not particularly limited. For example, when the Young's modulus is about 300 GPa or less, the conversion member 7 can be easily formed by bending a plate-like material.
- the angle ⁇ formed by the planar first portion 21 and the planar first side surface 10c is about 15 ° to 45 °, because the driving force of the piezoelectric element 10 can be efficiently converted.
- the ratio (L2 / L1) of the length L2 along the x direction of the piezoelectric element 10 to the length L1 along the z direction of the piezoelectric element 10 is preferably about 0.8 to 2.
- the ratio (L3 / L2) of the length L3 along the x direction of the top of the first portion 21 to the length L2 along the x direction of the piezoelectric element 10 is about 0.3 to 0.7. preferable.
- the ratio (L4 / L2) of the length L4 along the x direction of each of the sixth and seventh portions 26 and 27 to the length L2 along the x direction of the piezoelectric element 10 is 0.05 to 0.2. It is preferable that it is a grade. By doing so, the expansion and contraction deformation along the x direction of the piezoelectric element 10 is converted into the displacement along the z direction of the first portion 21, and the drive shaft 6 is displaced in the z direction, thereby driving the driven member 5. Can be moved along the z-direction.
- FIG. 1B is a perspective view showing a fixing structure of the drive shaft 6 to the conversion member 7 in the actuator 3 according to the first embodiment of the present invention.
- FIG. 2 is a perspective view showing the appearance of the conversion member 7.
- FIG. 3 is a partial cross-sectional perspective view of the fixing structure shown in FIG.
- a hole 21 c serving as a recess in which the drive shaft 6 is fitted is provided in the first portion 21.
- the inner diameter of the hole 21c is equal to or slightly smaller than the outer diameter of the drive shaft 6.
- the one end 6 a side of the drive shaft 6 is inserted into the hole 21 c, and the drive shaft 6 is fixed to the conversion member 7.
- the drive shaft 6 is joined and fixed to the first portion 21 by an appropriate joining method such as an adhesive or welding.
- the hole 21c may be a blind hole instead of a through hole.
- the drive shaft 6 can be easily fixed to the first portion 21 of the conversion member 7 at a desired position with high accuracy by inserting and joining the drive shaft 6 into the hole 21c. Therefore, even when downsizing is advanced, the drive shaft 6 can be fixed to the first portion 21 of the conversion member 7 with high accuracy. Accordingly, it is possible to reduce the size without impairing the displacement of the drive shaft 6.
- positioning is achieved by fitting one end 6a of the drive shaft 6 into the hole 21c. Therefore, when obtaining the actuator 3 of the present embodiment, a positioning jig or the like can be omitted. Therefore, the manufacturing cost can be reduced.
- the controller 2 applies, for example, a pulsed voltage between the first and second electrodes 12 and 13 of the piezoelectric element 10. Thereby, the piezoelectric element 10 expands and contracts along the x direction.
- each of the fourth and fifth portions 24 and 25 is fixed to the second side surface 10d.
- the second and third portions 22 and 23 are in contact with the first and second end faces 10a and 10b.
- the piezoelectric element 10 extends in the x direction
- at least the z direction z1 side portion of the second portion 22 is displaced to the x1 side
- at least the z direction z1 side portion of the third portion 23 is the x2 side. It is displaced to.
- interval between the part by the side of z1 of the 2nd part 22 and the part by the side of z1 of the 3rd part 23 becomes wide.
- the curvature of the convex portion 21a of the first portion 21 connected to the second and third portions 22 and 23 is increased. Therefore, the top part of the convex part 21a is displaced to the z2 side.
- the conversion member 7 converts the expansion / contraction force along the x direction of the piezoelectric element 10 into a driving force along the z direction.
- the convex part 21a of the 1st part 21 has a displacement part displaced along the z direction with the said driving force.
- the displacement in the x direction becomes 0 at the midpoint of the dimension L1 of the piezoelectric element 10 and contracts in the z direction to contract in the first direction 10c and the second side face 10d.
- the interval of is going to be slightly smaller.
- the second side surface 10d is partially fixed to the fourth and fifth portions 24 and 25 of the conversion member 7 and is restrained by the conversion member 7, the second side surface 10d is in the z direction at the center of the second side surface 10d. The displacement of is also reduced.
- the amount of displacement of the center portion of the second side surface 10d or the center portion of the lower surface of the conversion member consisting of the fourth and fifth portions 24 and 25 is smaller than the displacement amount of the first portion 21 in the z direction.
- the fourth and fifth portions 24 and 25 of the conversion member 7 can be joined in the vicinity of the center, and the portions can be extended downward to be fixed to the housing without any special treatment.
- the piezoelectric element 10 expands and contracts, the top of the convex portion 21a vibrates in the z direction. Along with this, the drive shaft 6 also vibrates in the z direction. That is, the drive shaft 6 repeatedly performs displacement toward the z1 side and displacement toward the z2 side. At this time, if the conversion member 7 is driven steeply according to a steep voltage waveform applied to the piezoelectric element 10 from the control unit 2, the displacement of the drive shaft 6 also becomes rapid.
- the displacement speed (displacement amount per unit time) in the z1 direction of the drive shaft 6 is higher than the set value, the distance between the driven member 5 provided in contact with the drive shaft 6 and the drive shaft 6 The inertial force acting on the driven member 5 is more dominant than the frictional force, and the driven member 5 slides on the drive shaft 6 relatively in the z2 direction.
- the displacement speed of the drive shaft 6 in the z2 direction is equal to or less than the setting, the frictional force between the driven member 5 and the drive shaft 6 is superior to the inertial force acting on the driven member 5, and the driven The relative position of the member 5 and the drive shaft 6 does not change. By repeating this, the driven member 5 moves in the z2 direction.
- the conversion member 7 of this embodiment does not require a weight or fixing. For this reason, size reduction of the actuator 3 can be achieved by using the conversion member 7.
- a conventional actuator shown in FIG. 13 in which the diaphragms 103a and 103b and the shaft 101 are arranged along the driving direction of the shaft, and the shaft 101 is displaced in the driving direction by bending deformation of the vibrating plates 103a and 103b.
- the dimension in the z direction which is the direction in which the axis extends, can be reduced.
- the drive shaft 6 is positioned and fixed to the first portion 21 by fitting. Therefore, even when the size reduction is advanced, the displacement of the drive shaft 6 is not easily lost. Therefore, downsizing can also be promoted.
- the actuator 3 of this embodiment does not require an expensive weight having a high specific gravity. Therefore, since the actuator 3 can reduce the number of parts, manufacturing cost can be reduced. Also, the weight of the actuator can be reduced by eliminating the weight. Furthermore, assembly is easy, such as extending the metal at the center of the lower side of the conversion member 7 and fixing it to the housing.
- the manufacturing process can be simplified and the manufacturing cost can be reduced.
- the actuator 3 of the present embodiment is easier to control than the conventional actuator 100. That is, in the conventional actuator 100, when the diaphragms 103a and 103b are convex outward, the shaft fixing member 102 is easily deformed downward and the diaphragms 103a and 103b are directed inward. When it becomes convex, the shaft fixing member 102 is easily deformed upward. For this reason, when the diaphragms 103a and 103b are deformed outwardly and inwardly, the overall position of the shaft fixing member 102 moves downward in both cases, but the deformation of the diaphragms 103a and 103b is outside or inside.
- the direction of deflection deformation of the shaft fixing member 102 is upside down. For this reason, the displacement behavior of the shaft differs depending on the vertical direction, and it becomes difficult to control the amount of displacement of the shaft. Therefore, it is difficult to control the vibration of the shaft 101, specifically, to move the engaging member 106 stably. Further, when the bending deformation of the diaphragms 103a and 103b is used, the generation force of the driving force is reduced and the resonance frequency is lowered. As a result, it is difficult to adapt when the driven body is relatively heavy, and it is difficult to control unless the drive pulse frequency is generally lower than the resonance frequency. Therefore, the driven body is determined by the product of the axial displacement and the drive pulse frequency. Body movement speed is also limited.
- FIGS. 6A and 6B are a perspective view and a partial cross-sectional perspective view showing a fixing structure of the drive shaft 6 with respect to the conversion member 7a in the actuator according to the second embodiment of the present invention.
- FIG. It is a perspective view which shows the external appearance of the member 7a.
- a hole 21c as a through hole is provided in the first portion 21 of the conversion member 7a. This is the same as the conversion member 7 of the first embodiment.
- an annular support portion 21d protruding upward is provided on the outer surface of the first portion 21 and the upper surface in the drawing. That is, an annular support portion 21d having an inner diameter equal to the inner diameter of the hole 21c is provided. Since the present embodiment is the same as the first embodiment with respect to other points, the description of the first embodiment is incorporated.
- the conversion member 7a is provided with the annular support portion 21d, the mechanical strength of the portion of the first portion 21 fixed to the drive shaft 6 can be increased. Therefore, deformation such as deflection of the first portion 21 due to the force received from the drive shaft 6 is unlikely to occur. Thereby, a decrease in displacement efficiency can be effectively suppressed.
- the drive shaft 6 can be supported also on the inner peripheral surface of the annular support portion 21d. Therefore, it is possible to reliably suppress the extending direction of the drive shaft 6 from being inclined from the direction perpendicular to the surface direction of the first portion 21.
- the annular support portion 21d has an annular shape, but a support portion having another shape may be provided instead of the annular support portion 21d. That is, even if the hole 21c is circular, the outer shape in the planar shape of the annular support portion 21d is not limited to a circle but may be other shapes such as a rectangle. Furthermore, a shape in which a part of the support part is cut out and a plurality of support part parts that are not annular are connected in the circumferential direction may be used.
- FIGS. 8A and 8B are a perspective view and a partial cross-sectional perspective view showing a fixing structure of the drive shaft 6 to the conversion member 7b in the actuator according to the third embodiment of the present invention, and FIG. It is a perspective view which shows the external appearance of the member 7b.
- the protrusion 21e is provided on the upper surface of the first portion 21 of the conversion member 7b.
- the protrusion 21e has a columnar portion 21e2 provided on the first portion 21 and a hemispherical portion 21e1 connected to the upper side of the columnar portion 21e2.
- the outer diameter of the columnar portion 21e2 is equal to the inner diameter of the one end portion 6a of the drive shaft 6.
- the opening at one end 6a of the drive shaft 6 constitutes a recess in the present invention.
- the drive shaft 6 is positioned with respect to the first portion 21 by fitting the protrusion 21 e provided on the first portion 21 into the recess. Then, similarly to the first embodiment, by using an appropriate bonding method such as an adhesive, the first portion 21 and the drive shaft 6 are bonded, and the drive shaft 6 is the first portion of the conversion member 7b. 21 is fixed. Also in the present embodiment, positioning can be performed by fitting the protrusion 21e and the drive shaft 6 together. Therefore, even when downsizing is advanced, the drive shaft 6 can be fixed to the first portion 21 of the conversion member 7b easily and with high accuracy.
- the protrusion 21e is in contact with the inner peripheral surface of the drive shaft 6 with a large area. Therefore, the bonding strength between the drive shaft 6 and the first portion 21 can also be increased. Further, similarly to the second embodiment, it is possible to reliably suppress the extending direction of the drive shaft 6 from being inclined from the direction perpendicular to the surface direction of the first portion 21.
- the shape of the protrusion 21e is not particularly limited, and a part of the columnar portion 21e2 may be cut out. Furthermore, since the opening of the one end portion 6a of the drive shaft 6 is circular, the columnar portion 21e2 is provided, but the shape is not limited to the columnar shape. If the opening shape of the portion corresponding to the concave portion of the drive shaft 6 is another shape, the protrusion 21e may be provided so as to have an outer shape that fits into the other shape.
- FIG. 10A is a perspective view of a conversion member 7c used in the actuator according to the fourth embodiment of the present invention
- FIG. 10B is a drive in the actuator according to the fourth embodiment of the present invention. It is a perspective view which shows the fixation structure with respect to the conversion member of an axis
- a plurality of support protrusions 21f and 21g are provided on the upper surface of the first portion 21 of the conversion member 7c.
- the inner peripheral surfaces of the support protrusions 21f and 21g are shaped along the outer peripheral surface of the drive shaft 6. Therefore, in this embodiment, the inner side surfaces of the support protrusions 21f and 21g are part of a cylindrical curved surface.
- the diameter of this cylindrical curved surface is substantially the same as the outer diameter of the drive shaft 6.
- the support protrusions 21f and 21g provided on the first portion 21 constitute a recess in the present invention.
- the drive shaft 6 is positioned with respect to the first portion 21 by fitting the drive shaft 6 between the support protrusions 21f and 21g. Then, similarly to the first embodiment, by using an appropriate joining method such as an adhesive, the first portion 21 and the drive shaft 6 are joined, and the drive shaft 6 is the first portion of the conversion member 7c. 21 is fixed.
- positioning can be performed by fitting the support protrusions 21f and 21g with the drive shaft 6. Therefore, even when downsizing is advanced, the drive shaft 6 can be fixed to the first portion 21 of the conversion member 7c easily and with high accuracy.
- the support protrusions 21f and 21g are in contact with the outer peripheral surface of the drive shaft 6 with a large area. Therefore, the bonding strength between the drive shaft 6 and the first portion 21 can also be increased. Further, similarly to the second and third embodiments, it is possible to reliably suppress the extending direction of the drive shaft 6 from being inclined from the direction perpendicular to the surface direction of the first portion 21.
- FIG. 11 is a schematic perspective view of an actuator according to a modification of the present invention.
- the drive shaft 6 has a rectangular tube shape.
- the shape of the drive shaft is not limited to a cylindrical shape, and may be a rectangular tube shape.
- the first portion 21 of the conversion member 7 is provided with a substantially rectangular hole having a shape along the outer peripheral side surface of the rectangular tube-shaped drive shaft 6.
- the drive shaft 6 is fixed to the first portion 21 of the conversion member 7 so that the drive shaft 6 fits in the rectangular hole.
- the drive shaft 6 fits so that the drive shaft 6 fits in the recess. What is necessary is just to select the outer diameter of the part to fit, and the planar shape of a recessed part.
- the drive shaft 6 is not limited to a cylindrical body, but may be a columnar body. Even in this case, in the first embodiment, the second embodiment, and the fourth embodiment described above, since the concave portion is provided on the first portion 21 side, the drive shaft 6 can be easily provided in the concave portion. And can be fixed to the first portion 21. Further, as in the third embodiment, in the structure in which the protrusion 21e inserted at the time of fitting is provided on the first portion 21 side, it is necessary to provide a recess on the drive shaft 6 side. In the second embodiment, since it is a cylindrical body, the opening constitutes a recess.
- the drive shaft 6 may be configured by providing such a hole on the end surface of one end of the cylinder.
- FIG. 12 is a perspective view for explaining a process of preparing the conversion member in the actuator according to the modification of the present invention.
- the conversion member 7 is formed on the lead frame 101. And the structure where the drive shaft 6 was fixed to this conversion member 7 is shown.
- the conversion member 7 can be easily formed by bending a metal plate connected to the lead frame 101 by press working or the like. Thereafter, as shown in the figure, the drive shaft 6 may be joined and fixed to the formed conversion member 7 according to the above-described embodiment.
- the conversion member 7 is formed by a press working member formed by pressing a metal plate, the working process can be simplified. Also, the conversion member 7 and the drive shaft 6 can be processed integrally. Therefore, the manufacturing cost can be reduced.
Abstract
Provided is an actuator whereby further size reduction can be achieved.
Disclosed is an actuator (3) wherein: a conversion member (7) is connected to a drive element (10) such that the displacement direction of the drive element (10) is converted; one end of a drive shaft (6) is fixed to a first portion (21) of the conversion member (7); and the drive shaft (6) is fixed to the first portion (21) of the conversion member (7) such that one of the drive shaft (6) and the first portion (21) is fitted in a recessed portion that is provided in the other one of the drive shaft and the first portion.
Description
本発明は、駆動素子の伸縮による力を伸縮方向とは異なる方向の力に変換し、該伸縮方向とは異なる方向に沿って駆動軸を変位させるアクチュエータに関する。
The present invention relates to an actuator that converts a force due to expansion / contraction of a drive element into a force in a direction different from the expansion / contraction direction and displaces the drive shaft along a direction different from the expansion / contraction direction.
従来、小型のアクチュエータとして、圧電素子を用いたアクチュエータが知られている。圧電素子を用いたアクチュエータの一例が下記の特許文献1,2に記載されている。特許文献1に記載のアクチュエータでは、電気機械変換素子が長さ方向に伸縮することにより、電気機械変換素子の長さ方向の端部に接続された駆動摩擦部材が長さ方向に振動する。駆動摩擦部材に係合されている係合部材が、駆動摩擦部材の長さ方向の振動にともなって、駆動摩擦部材に対して長さ方向に相対的に移動する。従って、特許文献1に記載のアクチュエータでは、電気機械変換素子の伸縮方向と、係合部材の移動方向すなわち駆動力発生方向とは平行とされている。
Conventionally, an actuator using a piezoelectric element is known as a small actuator. Examples of actuators using piezoelectric elements are described in Patent Documents 1 and 2 below. In the actuator described in Patent Document 1, when the electromechanical conversion element expands and contracts in the length direction, the drive friction member connected to the end portion in the length direction of the electromechanical conversion element vibrates in the length direction. The engagement member engaged with the drive friction member moves relative to the drive friction member in the length direction with the vibration in the length direction of the drive friction member. Therefore, in the actuator described in Patent Document 1, the expansion / contraction direction of the electromechanical conversion element is parallel to the moving direction of the engagement member, that is, the driving force generation direction.
他方、特許文献2には、駆動力の方向を変換する機構を備えたアクチュエータが開示されている。図13に示すように、アクチュエータ100は、板状の軸固定部材102と、一対の振動板103a,103bと、基板104と、軸101とを備えている。軸固定部材102には、軸101の一端が接合されている。一対の振動板103a,103bが、軸固定部材102と一体に設けられている。振動板103a,103bの上端が、軸固定部材102の両端部を支持している。基板104には、振動板103a,103bの軸固定部材102とは反対側の端部が固定されている。振動板103a,103bには、圧電素子105a,105bが固定されている。圧電素子105a,105bの伸縮変形に伴って、振動板103a,103bが屈曲変形する。その結果、圧電素子105a,105bから発生する駆動力の方向が変換されて軸固定部材102が振動変位する。これにより、軸101が振動し、係合部材106が駆動される。
On the other hand, Patent Document 2 discloses an actuator provided with a mechanism for changing the direction of the driving force. As shown in FIG. 13, the actuator 100 includes a plate-like shaft fixing member 102, a pair of diaphragms 103 a and 103 b, a substrate 104, and a shaft 101. One end of the shaft 101 is joined to the shaft fixing member 102. A pair of diaphragms 103 a and 103 b are provided integrally with the shaft fixing member 102. The upper ends of the diaphragms 103 a and 103 b support both end portions of the shaft fixing member 102. The ends of the vibration plates 103a and 103b opposite to the shaft fixing member 102 are fixed to the substrate 104. Piezoelectric elements 105a and 105b are fixed to the diaphragms 103a and 103b. As the piezoelectric elements 105a and 105b expand and contract, the diaphragms 103a and 103b are bent and deformed. As a result, the direction of the driving force generated from the piezoelectric elements 105a and 105b is changed, and the shaft fixing member 102 is displaced by vibration. As a result, the shaft 101 vibrates and the engagement member 106 is driven.
また、下記の特許文献3には、ピエゾ素子の振動方向一端側にロッドが結合されているアクチュエータが開示されている。ここでは、ピエゾ素子の振動方向他端側にカウンターバランスが結合されている。ピエゾ素子とロッドとの結合は以下のようにして行われている。すなわち、ピエゾ素子の中心に芯棒が挿入されている。該芯棒の一端がピエゾ素子から突出している。芯棒の突出している部分がロッドに挿入されて固定されている。
Also, Patent Document 3 below discloses an actuator in which a rod is coupled to one end side in the vibration direction of a piezo element. Here, a counter balance is coupled to the other end side in the vibration direction of the piezo element. The coupling between the piezo element and the rod is performed as follows. That is, a core rod is inserted in the center of the piezo element. One end of the core bar protrudes from the piezo element. The protruding part of the core rod is inserted into the rod and fixed.
特許文献1に記載のアクチュエータでは、変位量を大きくするには、電気機械変換素子の振動方向の長さを長くしなければならない。従って、振動変位方向の寸法を小さくすることができない。
In the actuator described in Patent Document 1, in order to increase the amount of displacement, the length in the vibration direction of the electromechanical transducer must be increased. Therefore, the dimension in the vibration displacement direction cannot be reduced.
他方、特許文献2に記載のアクチュエータ100においても、変位量を大きくするには、振動板103a,103bの振動変位方向と平行な方向の寸法を大きくしなければならない。従って、振動変位方向の寸法を小さくすることができない。
On the other hand, in the actuator 100 described in Patent Document 2, in order to increase the amount of displacement, the dimensions of the diaphragms 103a and 103b in the direction parallel to the vibration displacement direction must be increased. Therefore, the dimension in the vibration displacement direction cannot be reduced.
加えて、特許文献2に記載のアクチュエータ100では、小型化を進めると、軸101を軸固定部材102の中心に高精度に固定することが困難となる。従って、安定な変位を維持したまま小型化を図ることが困難である。
In addition, in the actuator 100 described in Patent Document 2, it is difficult to fix the shaft 101 to the center of the shaft fixing member 102 with high accuracy as the size of the actuator 100 increases. Therefore, it is difficult to reduce the size while maintaining a stable displacement.
特許文献3に記載のアクチュエータでは、芯棒がピエゾ素子の伸縮をロッドに直接伝達している。従って、充分な駆動力を得るには、ピエゾ素子に、上記カウンターバランスを接続しなければならない。よって、やはり小型化が困難である。
In the actuator described in Patent Document 3, the core rod directly transmits the expansion and contraction of the piezo element to the rod. Therefore, in order to obtain a sufficient driving force, the counter balance must be connected to the piezo element. Therefore, miniaturization is still difficult.
本発明の目的は、より一層の小型化を図り得るアクチュエータを提供することにある。
An object of the present invention is to provide an actuator that can be further miniaturized.
本発明に係るアクチュエータは、駆動素子と、変換部材と、駆動軸とを備える。駆動素子は、第1の方向に互いに対向する第1及び第2の端面と、第1の方向に対して垂直な第2の方向に対向する第1及び第2の側面とを有する。駆動素子は、第1の方向に沿って伸縮する。変換部材は、変位部と、第1の部分と、第2の部分と、第3の部分と、第4の部分と、第5の部分とを有する。変位部は、駆動素子の第1の方向に沿った伸縮力を第2の方向に沿った駆動力に変換し、当該駆動力により第2の方向に沿って変位する。第1の部分は、第1の側面の上に位置し、第1の側面から離間した前記変位部を含む凸部を有する。第2の部分は、第1の部分に接続されており、第1の端面に当接している。第3の部分は、第1の部分に接続されており、第2の端面に当接している。第4の部分は、第2の部分に接続されており、第2の側面に固定されている。第5の部分は、第3の部分に接続されており、第2の側面に固定されている。変換部材は、弾性を有する。
The actuator according to the present invention includes a drive element, a conversion member, and a drive shaft. The drive element has first and second end faces that face each other in the first direction, and first and second side faces that face each other in a second direction perpendicular to the first direction. The drive element expands and contracts along the first direction. The conversion member has a displacement portion, a first portion, a second portion, a third portion, a fourth portion, and a fifth portion. The displacement unit converts the expansion / contraction force along the first direction of the drive element into a drive force along the second direction, and is displaced along the second direction by the drive force. The first portion has a convex portion that is located on the first side surface and includes the displacement portion that is spaced apart from the first side surface. The second part is connected to the first part and is in contact with the first end face. The third portion is connected to the first portion and is in contact with the second end surface. The fourth portion is connected to the second portion and is fixed to the second side surface. The fifth portion is connected to the third portion and is fixed to the second side surface. The conversion member has elasticity.
駆動軸は、変換部材の第1の部分に一端が固定されておりかつ上記第2の方向に延びている。そして、駆動軸及び変換部材の第1の部分のうちの一方が他方に設けられた凹部に嵌まり合うようにして駆動軸が第1の部分に固定されている。
The drive shaft has one end fixed to the first portion of the conversion member and extends in the second direction. The drive shaft is fixed to the first portion so that one of the drive shaft and the first portion of the conversion member fits into the recess provided on the other.
なお、本発明において、「当接」には、直接当接している場合のみならず、間接的に当接している場合も含まれるものとする。すなわち、「当接」とは、部材間に空隙が存在しないことを意味する。
In the present invention, “contact” includes not only direct contact but also indirectly contact. That is, “contact” means that there is no gap between the members.
本発明に係るアクチュエータのある特定の局面では、凹部が変換部材の第1の部分の駆動軸が固定される面に設けられた穴であり、穴に駆動軸の一端側が挿入されて駆動軸が穴に嵌まり合っている。
In a specific aspect of the actuator according to the present invention, the recess is a hole provided in a surface to which the drive shaft of the first portion of the conversion member is fixed, and one end side of the drive shaft is inserted into the hole so that the drive shaft is It fits in the hole.
本発明に係るアクチュエータの他の特定の局面では、凹部が駆動軸の一端に開口している穴であり、変換部材の第1の部分の駆動軸が固定される面に突起が設けられており、穴に該突起が嵌まり合うようにして駆動軸が第1の部分に固定されている。
In another specific aspect of the actuator according to the present invention, the recess is a hole opened at one end of the drive shaft, and a protrusion is provided on a surface to which the drive shaft of the first portion of the conversion member is fixed. The drive shaft is fixed to the first portion so that the protrusion fits into the hole.
本発明に係るアクチュエータのさらに他の特定の局面では、上記突起が駆動軸と一体に設けられている。この場合には、部品点数の低減及び組立工程の簡略化を図り得る。また、駆動軸の変換部材からの脱離が生じ難い。
In yet another specific aspect of the actuator according to the present invention, the protrusion is provided integrally with the drive shaft. In this case, the number of parts can be reduced and the assembly process can be simplified. Further, the drive shaft is hardly detached from the conversion member.
本発明に係るアクチュエータのさらに別の特定の局面では、上記変換部材が金属板をプレス加工してなるプレス加工部材からなる。従って、アクチュエータのコストを低減することができる。
In yet another specific aspect of the actuator according to the present invention, the conversion member is formed of a pressed member formed by pressing a metal plate. Therefore, the cost of the actuator can be reduced.
本発明に係るアクチュエータのまたさらに別の特定の局面では、変換部材と駆動軸とが1つの金属板をプレス加工してなるプレス加工部材からなる。従って、アクチュエータのコストを低減することができる。
In yet another specific aspect of the actuator according to the present invention, the conversion member and the drive shaft are formed by pressing a single metal plate. Therefore, the cost of the actuator can be reduced.
本発明に係るアクチュエータによれば、駆動軸及び変換部材が上記のように構成されているため、アクチュエータの小型化を図ることができる。加えて、駆動軸及び変換部材の第1の部分のうちの一方が他方に設けられた凹部に嵌まり合うようにして駆動軸が該変換部材の第1の部分に固定されているため、駆動軸が変換部材に高精度に固定される。従って、変位の安定性を損なうことなく、アクチュエータのより一層の小型化を図ることが可能となる。
According to the actuator of the present invention, since the drive shaft and the conversion member are configured as described above, the actuator can be downsized. In addition, since the drive shaft is fixed to the first portion of the conversion member so that one of the drive shaft and the first portion of the conversion member fits into the recess provided in the other, the drive The shaft is fixed to the conversion member with high accuracy. Accordingly, it is possible to further reduce the size of the actuator without impairing the displacement stability.
以下、図面を参照しつつ、本発明の具体的な実施形態を説明することにより、本発明を明らかにする。
Hereinafter, the present invention will be clarified by describing specific embodiments of the present invention with reference to the drawings.
(第1の実施形態)
図1(a)は、本発明の第1の実施形態に係るアクチュエータ3の模式的斜視図である。図4は、本発明の第1の実施形態に係るアクチュエータ3を含む駆動装置1の模式的側面図である。 (First embodiment)
FIG. 1A is a schematic perspective view of theactuator 3 according to the first embodiment of the present invention. FIG. 4 is a schematic side view of the drive device 1 including the actuator 3 according to the first embodiment of the present invention.
図1(a)は、本発明の第1の実施形態に係るアクチュエータ3の模式的斜視図である。図4は、本発明の第1の実施形態に係るアクチュエータ3を含む駆動装置1の模式的側面図である。 (First embodiment)
FIG. 1A is a schematic perspective view of the
図4に示すように、駆動装置1は、制御部2と、アクチュエータ3とを備えている。制御部2は、アクチュエータ3を制御する部分である。具体的には、制御部2は、後述するアクチュエータ3の駆動素子としての圧電素子10に印加する電圧を制御する。
As shown in FIG. 4, the drive device 1 includes a control unit 2 and an actuator 3. The control unit 2 is a part that controls the actuator 3. Specifically, the control unit 2 controls the voltage applied to the piezoelectric element 10 as a driving element of the actuator 3 described later.
圧電素子10は、内部に圧電セラミックスを介して積層された電極を有する積層圧電セラミック素子であることが好ましい。圧電素子10に印加する電圧が低くでき、かつ大きな変位量を得られるためである。また、圧電セラミックスは比較的剛性が高く、高周波の振動において減衰を少なくできるため、圧電セラミックスを用いた駆動素子を用いることによって、変位部材の共振周波数が高くできる。
The piezoelectric element 10 is preferably a laminated piezoelectric ceramic element having electrodes laminated inside through piezoelectric ceramics. This is because the voltage applied to the piezoelectric element 10 can be lowered and a large amount of displacement can be obtained. In addition, since the piezoelectric ceramic has a relatively high rigidity and can reduce attenuation in high-frequency vibrations, the resonance frequency of the displacement member can be increased by using a driving element using the piezoelectric ceramic.
なお、本発明において、駆動素子は、圧電素子に限定されない。本発明において、駆動素子は、電歪素子、磁歪素子、熱変形素子あるいは電磁力や静電気力を用いたリニアモーターであってもよい。
In the present invention, the drive element is not limited to a piezoelectric element. In the present invention, the driving element may be an electrostrictive element, a magnetostrictive element, a thermal deformation element, or a linear motor using electromagnetic force or electrostatic force.
アクチュエータ3は、駆動部材4と、被駆動部材5とを備えている。駆動部材4は、被駆動部材5を駆動させるものである。具体的には、駆動部材4は、後述する駆動軸6の変位によって、被駆動部材5をz方向に移動させるものである。ここで、z方向とは、駆動軸6の変位方向すなわち位置変換方向である。
The actuator 3 includes a driving member 4 and a driven member 5. The driving member 4 drives the driven member 5. Specifically, the drive member 4 moves the driven member 5 in the z direction by the displacement of the drive shaft 6 described later. Here, the z direction is a displacement direction of the drive shaft 6, that is, a position conversion direction.
なお、図1(a)及び図4においては、被駆動部材5を矩形板状に描画しているが、被駆動部材はこれに限定されるものではない。本発明において、駆動対象物である被駆動部材は、どのようなものでもあってもよく、例えば単体レンズあるいは組合せレンズ群、撮像素子、絞り機構、光学ミラー、レーザー発光素子、磁気ヘッド、各種センサ素子等であってもよい。
1A and 4, the driven member 5 is drawn in a rectangular plate shape, but the driven member is not limited to this. In the present invention, the driven member that is a driving object may be any member, for example, a single lens or a combination lens group, an image sensor, an aperture mechanism, an optical mirror, a laser light emitting element, a magnetic head, and various sensors. An element etc. may be sufficient.
駆動部材4は、z方向に沿って延びる駆動軸6と、変換部材7と、駆動素子としての圧電素子10とを備えている。駆動軸6は、被駆動部材5に設けられた貫通孔5aに挿入されている。駆動軸6は、例えば、カーボン等の比重の小さな材料により形成されていることが好ましい。また、被駆動部材5と駆動軸6とは、相互の摩擦が小さいものであることが好ましい。貫通孔5aと駆動軸6との係合力を適当にするために、バネ等による加圧機構を設けることが好ましい。
The drive member 4 includes a drive shaft 6 extending along the z direction, a conversion member 7, and a piezoelectric element 10 as a drive element. The drive shaft 6 is inserted into a through hole 5 a provided in the driven member 5. The drive shaft 6 is preferably formed of a material having a small specific gravity such as carbon. Moreover, it is preferable that the driven member 5 and the drive shaft 6 have a small mutual friction. In order to make the engagement force between the through hole 5a and the drive shaft 6 appropriate, it is preferable to provide a pressurizing mechanism such as a spring.
駆動軸6のz方向における一方側端部6aは、変換部材7に固定されている。変換部材7は、駆動軸6をz方向に沿って変位させるための部材である。
The one end 6 a in the z direction of the drive shaft 6 is fixed to the conversion member 7. The conversion member 7 is a member for displacing the drive shaft 6 along the z direction.
本実施形態では、後述するように、駆動軸6の変位を損なうことなく、駆動軸6の一方側端部6aを変換部材7に容易にかつ高精度に固定することができる。この点については、固定構造を後ほど詳述することにより明らかにする。
In this embodiment, as will be described later, the one end 6a of the drive shaft 6 can be easily and accurately fixed to the conversion member 7 without impairing the displacement of the drive shaft 6. This will be clarified by detailing the fixing structure later.
本実施形態では、圧電素子10が伸縮する方向は、z方向に対して垂直なx方向である。また、圧電素子10は、角柱状に形成されている。ここで、「角柱状」には、角部や稜線部の少なくとも一部が面取り状またはR面取り状であるものも含まれるものとする。また、角柱状には、直方体状が含まれるものとする。
In this embodiment, the direction in which the piezoelectric element 10 expands and contracts is the x direction perpendicular to the z direction. The piezoelectric element 10 is formed in a prismatic shape. Here, the “rectangular column shape” includes a shape in which at least a part of a corner portion or a ridge line portion is chamfered or R chamfered. In addition, the rectangular column shape includes a rectangular parallelepiped shape.
圧電素子10は、第1及び第2の端面10a,10bと、第1~第4の側面10c~10fとを有する。第1及び第2の端面10a,10bのそれぞれは、z方向及びx方向のそれぞれに対して垂直なy方向とz方向とに沿って延びている。第1及び第2の端面10a,10bは、x方向において対向している。第1及び第2の側面10c,10dのそれぞれは、x方向及びy方向に沿って延びている。第1及び第2の側面10c,10dは、z方向において対向している。第3及び第4の側面10e,10fのそれぞれは、x方向及びz方向に沿って延びている。第3及び第4の側面10e,10fは、y方向において対向している。
The piezoelectric element 10 has first and second end faces 10a and 10b, and first to fourth side faces 10c to 10f. Each of the first and second end faces 10a and 10b extends along the y direction and the z direction perpendicular to the z direction and the x direction, respectively. The first and second end faces 10a and 10b are opposed to each other in the x direction. Each of the first and second side faces 10c, 10d extends along the x direction and the y direction. The first and second side surfaces 10c and 10d are opposed to each other in the z direction. Each of the third and fourth side surfaces 10e and 10f extends along the x direction and the z direction. The third and fourth side surfaces 10e and 10f are opposed to each other in the y direction.
図5は、本発明の第1の実施形態に係るアクチュエータ3で用いられている圧電素子10と変換部材7との側面図である。図5に示すように、圧電素子10は、圧電層11を介してx方向に互いに対向している第1及び第2の電極12,13を複数対備えている。これら第1及び第2の電極12,13間に電圧を印加することにより、圧電素子10をx方向に伸縮させることができる。
FIG. 5 is a side view of the piezoelectric element 10 and the conversion member 7 used in the actuator 3 according to the first embodiment of the present invention. As shown in FIG. 5, the piezoelectric element 10 includes a plurality of pairs of first and second electrodes 12 and 13 that face each other in the x direction via the piezoelectric layer 11. By applying a voltage between the first and second electrodes 12 and 13, the piezoelectric element 10 can be expanded and contracted in the x direction.
なお、第1及び第2の電極が複数対設けられている必要は必ずしもない。第1及び第2の電極を一対のみ設けてもよい。また、第1及び第2の電極の対向方向は、伸縮方向であるx方向に限定されない。圧電体の分極方向によっては、第1及び第2の電極がz方向またはy方向に対向するように設けられることもある。
Note that it is not always necessary to provide a plurality of pairs of the first and second electrodes. Only a pair of the first and second electrodes may be provided. Further, the opposing direction of the first and second electrodes is not limited to the x direction which is the expansion / contraction direction. Depending on the polarization direction of the piezoelectric body, the first and second electrodes may be provided so as to face each other in the z direction or the y direction.
圧電層11並びに第1及び第2の電極12,13の材質は、特に限定されない。圧電層11は、例えば、チタン酸ジルコン酸鉛系セラミックス(PZT)、ニオブ酸カリウムナトリウム等のアルカリニオブ酸系セラミックス等の非鉛系圧電体セラミックスやタンタル酸リチウム等の圧電単結晶等の適宜の圧電体により形成することができる。第1及び第2の電極12,13は、例えば、Ag,Cu,Pt等の金属や、Ag-Pd合金などの合金により形成することができる。
The material of the piezoelectric layer 11 and the first and second electrodes 12 and 13 is not particularly limited. The piezoelectric layer 11 is made of, for example, lead-free piezoelectric ceramics such as lead zirconate titanate ceramics (PZT), alkaline niobate ceramics such as potassium sodium niobate, or piezoelectric single crystals such as lithium tantalate. It can be formed of a piezoelectric body. The first and second electrodes 12 and 13 can be formed of, for example, a metal such as Ag, Cu, or Pt, or an alloy such as an Ag—Pd alloy.
変換部材7は、鉄、銅、ニッケルなどの金属やステンレス、42ニッケル鉄、ベリリウム銅、リン青銅、真鍮などの合金に代表されるような弾性体を含む。変換部材7は、圧電素子10のx方向に沿った伸縮による駆動力がz方向に沿った駆動力となるように駆動力の方向を変換し、その方向の変換された駆動力により、駆動軸6をz方向に沿って変位させる素子である。なお、圧電素子10の駆動方向と、変換部材7によって圧電素子10の駆動力が変換される方向とは、必ずしも垂直でなくともよい。また、本実施形態では、x方向とz方向とは垂直であるが、x方向とz方向が垂直である必要は必ずしもない。
The conversion member 7 includes a metal such as iron, copper and nickel, and an elastic body represented by an alloy such as stainless steel, 42 nickel iron, beryllium copper, phosphor bronze and brass. The conversion member 7 converts the direction of the driving force so that the driving force due to expansion and contraction along the x direction of the piezoelectric element 10 becomes the driving force along the z direction, and the driving shaft is converted by the converted driving force in the direction. 6 is an element that displaces along the z direction. The driving direction of the piezoelectric element 10 and the direction in which the driving force of the piezoelectric element 10 is converted by the conversion member 7 are not necessarily perpendicular. In this embodiment, the x direction and the z direction are perpendicular to each other, but the x direction and the z direction are not necessarily perpendicular to each other.
変換部材7は、第1~第7の部分21~27を有する環状である。上記圧電素子10は、この環状の変換部材7と嵌合している。本実施形態においては、第1~第7の部分21~27は、一体に形成されている。すなわち、変換部材7は、環状である。変換部材7を環状にすることで、変換部材7と圧電素子10とからなる部分の共振周波数を高くすることが容易になる。このため、より周波数の高い、つまり駆動速度の速い振動を得ることが容易になる。さらに、変換部材7と圧電素子10とからなる部分の共振周波数付近で圧電素子10を振動させることで、少ない投入エネルギーで駆動することができる。なお、変換部材7は、単一の部材により構成されていてもよいし、複数の部材が接合されることにより構成されていてもよい。
The conversion member 7 has an annular shape having first to seventh portions 21 to 27. The piezoelectric element 10 is fitted with the annular conversion member 7. In the present embodiment, the first to seventh portions 21 to 27 are integrally formed. That is, the conversion member 7 is annular. By making the conversion member 7 annular, it is easy to increase the resonance frequency of the portion composed of the conversion member 7 and the piezoelectric element 10. For this reason, it becomes easy to obtain vibration having a higher frequency, that is, a higher driving speed. Further, the piezoelectric element 10 can be vibrated in the vicinity of the resonance frequency of the portion composed of the conversion member 7 and the piezoelectric element 10, so that it can be driven with less input energy. In addition, the conversion member 7 may be comprised by the single member, and may be comprised by joining a some member.
第1の部分21は、第1の側面10cの上に位置している。すなわち、第1の部分21は、第1の側面10cのz方向におけるz1側に位置している。第1の部分21は、凸部21aを有する。本実施形態では、第1の部分21の全体が凸部21aにより構成されている。凸部21aは、第1の側面10cから離間している。凸部21aは、第1の側面10cからz方向のz1側に突出している。上記駆動軸6は、この凸部21aの頂部に取り付けられている。駆動軸6の凸部21aへの取り付け方法は特に限定されない。例えば、樹脂接着剤を用いて駆動軸6を凸部21aに取り付けてもよいし、変換部材7と同材質で一体に形成されていてもよい。また、駆動軸6の断面形状は円形、各種多角形あるいは各種組合せ形状等適宜の形状とすることができる。駆動軸6の断面の形状と寸法はz方向に沿ってほぼ同一であることが好ましい。
The first portion 21 is located on the first side surface 10c. That is, the first portion 21 is located on the z1 side in the z direction of the first side surface 10c. The first portion 21 has a convex portion 21a. In the present embodiment, the entire first portion 21 is constituted by the convex portion 21a. The convex portion 21a is separated from the first side surface 10c. The convex portion 21a protrudes from the first side surface 10c to the z1 side in the z direction. The drive shaft 6 is attached to the top of the convex portion 21a. A method for attaching the drive shaft 6 to the convex portion 21a is not particularly limited. For example, the drive shaft 6 may be attached to the convex portion 21 a using a resin adhesive, or may be integrally formed of the same material as the conversion member 7. The cross-sectional shape of the drive shaft 6 can be an appropriate shape such as a circle, various polygons, or various combinations. The cross-sectional shape and dimensions of the drive shaft 6 are preferably substantially the same along the z direction.
第2の部分22は、平板状である。第2の部分22は、第1の端面10aの上に位置している。すなわち、第2の部分22は、第1の端面10aのx方向のx1側に位置している。第2の部分22のz方向z2側の端部は、第2の側面10dよりもz2側にまで至っている。第2の部分22は、第1の端面10aに当接している。具体的には、本実施形態では、第1の端面10aの実質的に全体が第2の部分22に当接している。詳細には、図5に示すように、第2の部分22と第1の端面10aとは、樹脂接着剤層31により接着されており、樹脂接着剤層31を介して当接している。なお、図1(a)及び図4では、樹脂接着剤層31及び後述の樹脂接着剤層32,33の描画を省略している。
The second portion 22 has a flat plate shape. The second portion 22 is located on the first end face 10a. That is, the second portion 22 is located on the x1 side in the x direction of the first end face 10a. The end of the second portion 22 on the z-direction z2 side reaches the z2 side from the second side surface 10d. The second portion 22 is in contact with the first end face 10a. Specifically, in the present embodiment, substantially the entire first end surface 10 a is in contact with the second portion 22. Specifically, as shown in FIG. 5, the second portion 22 and the first end surface 10 a are bonded by the resin adhesive layer 31 and are in contact with each other via the resin adhesive layer 31. In FIG. 1A and FIG. 4, drawing of the resin adhesive layer 31 and the resin adhesive layers 32 and 33 described later is omitted.
第3の部分23は、平板状である。第3の部分23は、第2の端面10bの上に位置している。すなわち、第3の部分23は、第2の端面10bのx方向のx2側に位置している。第3の部分23のz方向z2側の端部は、第2の側面10dよりもz2側にまで至っている。第3の部分23は、第2の端面10bに当接している。具体的には、本実施形態では、第2の端面10bの実質的に全体が第3の部分23に当接している。詳細には、図5に示すように、第3の部分23と第2の端面10bとは、樹脂接着剤層32により接着されており、樹脂接着剤層32を介して当接している。
The third portion 23 has a flat plate shape. The third portion 23 is located on the second end face 10b. That is, the third portion 23 is located on the x2 side in the x direction of the second end face 10b. The end of the third portion 23 on the z-direction z2 side is closer to the z2 side than the second side surface 10d. The third portion 23 is in contact with the second end face 10b. Specifically, in the present embodiment, substantially the entire second end surface 10 b is in contact with the third portion 23. Specifically, as shown in FIG. 5, the third portion 23 and the second end surface 10 b are bonded by the resin adhesive layer 32 and are in contact with each other via the resin adhesive layer 32.
第4の部分24は、第2の部分22に間接的に接続されている。第4の部分24は、第2の側面10dの上に位置している。すなわち、第4の部分24は、第2の側面10dのz方向のz2側に位置している。
The fourth portion 24 is indirectly connected to the second portion 22. The fourth portion 24 is located on the second side surface 10d. That is, the fourth portion 24 is located on the z2 side in the z direction of the second side surface 10d.
一方、第5の部分25は、第3の部分23に間接的に接続されている。第5の部分25は、第2の側面10dの上に位置している。すなわち、第5の部分25は、第2の側面10dのz方向のz2側に位置している。
On the other hand, the fifth portion 25 is indirectly connected to the third portion 23. The fifth portion 25 is located on the second side surface 10d. That is, the fifth portion 25 is located on the z2 side in the z direction of the second side surface 10d.
本実施形態では、第4及び第5の部分24,25は、一体に形成されている。そして、第4及び第5の部分24,25は、樹脂接着剤層33により第2の側面10dに接着されることにより、固定されている。本実施形態では、第2の側面10dの実質的に全体が樹脂接着剤層33により第4及び第5の部分24,25に固定されている。
In the present embodiment, the fourth and fifth portions 24 and 25 are integrally formed. The fourth and fifth portions 24 and 25 are fixed by being bonded to the second side surface 10d by the resin adhesive layer 33. In the present embodiment, substantially the entire second side surface 10 d is fixed to the fourth and fifth portions 24 and 25 by the resin adhesive layer 33.
第2の部分22と第4の部分24とは、第6の部分26により接続されている。第6の部分26は、第2の側面10dの第1の端面10a側の端縁部の上に位置している。すなわち、第6の部分26は、第2の側面10dと第1の端面10aとにより構成された稜線部のz方向z2側に位置している。第6の部分26は、第2の側面10dから離間して設けられている。
The second part 22 and the fourth part 24 are connected by a sixth part 26. The sixth portion 26 is located on the end edge of the second side surface 10d on the first end surface 10a side. That is, the sixth portion 26 is located on the z-direction z2 side of the ridge line portion formed by the second side surface 10d and the first end surface 10a. The sixth portion 26 is provided apart from the second side surface 10d.
第3の部分23と第5の部分25とは、第7の部分27により接続されている。第7の部分27は、第2の側面10dの第2の端面10b側の端縁部の上に位置している。すなわち、第7の部分27は、第2の側面10dと第2の端面10bとにより構成された稜線部のz方向z2側に位置している。第7の部分27は、第2の側面10dから離間して設けられている。
The third part 23 and the fifth part 25 are connected by a seventh part 27. The seventh portion 27 is located on the end edge of the second side surface 10d on the second end surface 10b side. That is, the seventh portion 27 is located on the z direction z2 side of the ridge line portion constituted by the second side surface 10d and the second end surface 10b. The seventh portion 27 is provided apart from the second side surface 10d.
なお、本実施形態では、第1または第2の端面10a,10bと第1の側面10cとの間の稜線部が変換部材7と接触している例について説明した。但し、本発明は、この構成に限定されない。変換部材は、第1または第2の端面と第1の側面との間の稜線部と変換部材とが接触しないように設けられていてもよい。すなわち、第2及び第3の部分22,23が第1または第2の端面10a,10bと第1の側面10cとの間の稜線部と接触しないように設けられていてもよい。
In the present embodiment, the example in which the ridge line portion between the first or second end face 10a, 10b and the first side face 10c is in contact with the conversion member 7 has been described. However, the present invention is not limited to this configuration. The conversion member may be provided such that the ridge line portion between the first or second end surface and the first side surface does not contact the conversion member. That is, the second and third portions 22 and 23 may be provided so as not to contact the ridge line portion between the first or second end face 10a or 10b and the first side face 10c.
なお、変換部材7が均一な幅の板状の部材によって閉じた環状構造に形成されるときにおいて、圧電素子10のyz断面が1mm程度である場合の板状の変換部材7の厚みtは、0.1mm~0.25mm程度であることが好ましい。変換部材7のヤング率は、100GPa以上であることが、変位部材の共振周波数を高くでき、振動の減衰を小さくできるため好ましい。変換部材7のヤング率の好ましい上限は、特に限定されないが、例えば、300GPa程度以下とすれば、板状の材料を曲げ加工することなどにより、変換部材7が容易に成形できる。平面状の第1の部分21と平面状の第1の側面10cとのなす角の大きさθは、15°~45°程度であることが、圧電素子10の駆動力を効率よく変換できるため好ましい。圧電素子10のz方向に沿った長さL1に対する、圧電素子10のx方向に沿った長さL2の比(L2/L1)は、0.8~2程度であることが好ましい。圧電素子10のx方向に沿った長さL2に対する第1の部分21の頂部のx方向に沿った長さL3の比(L3/L2)は、0.3~0.7程度であることが好ましい。圧電素子10のx方向に沿った長さL2に対する第6及び第7の部分26,27のそれぞれのx方向に沿った長さL4の比(L4/L2)は、0.05~0.2程度であることが好ましい。このようにすることによって、圧電素子10のx方向に沿った伸縮変形が第1の部分21のz方向に沿った変位に変換され、駆動軸6をz方向に変位させて、被駆動部材5をz方向に沿って移動させることができる。
In addition, when the conversion member 7 is formed in an annular structure closed by a plate-like member having a uniform width, the thickness t of the plate-like conversion member 7 when the yz section of the piezoelectric element 10 is about 1 mm is It is preferably about 0.1 mm to 0.25 mm. The Young's modulus of the conversion member 7 is preferably 100 GPa or more because the resonance frequency of the displacement member can be increased and the vibration attenuation can be reduced. The preferable upper limit of the Young's modulus of the conversion member 7 is not particularly limited. For example, when the Young's modulus is about 300 GPa or less, the conversion member 7 can be easily formed by bending a plate-like material. The angle θ formed by the planar first portion 21 and the planar first side surface 10c is about 15 ° to 45 °, because the driving force of the piezoelectric element 10 can be efficiently converted. preferable. The ratio (L2 / L1) of the length L2 along the x direction of the piezoelectric element 10 to the length L1 along the z direction of the piezoelectric element 10 is preferably about 0.8 to 2. The ratio (L3 / L2) of the length L3 along the x direction of the top of the first portion 21 to the length L2 along the x direction of the piezoelectric element 10 is about 0.3 to 0.7. preferable. The ratio (L4 / L2) of the length L4 along the x direction of each of the sixth and seventh portions 26 and 27 to the length L2 along the x direction of the piezoelectric element 10 is 0.05 to 0.2. It is preferable that it is a grade. By doing so, the expansion and contraction deformation along the x direction of the piezoelectric element 10 is converted into the displacement along the z direction of the first portion 21, and the drive shaft 6 is displaced in the z direction, thereby driving the driven member 5. Can be moved along the z-direction.
次に、上記駆動軸6の変換部材7に対する固定構造を、図1(b)、図2及び図3を図1(a)と共に参照して説明することとする。
Next, the structure for fixing the drive shaft 6 to the conversion member 7 will be described with reference to FIGS. 1B, 2 and 3 together with FIG.
図1(b)は、本発明の第1の実施形態に係るアクチュエータ3における駆動軸6の変換部材7に対する固定構造を示す斜視図である。図2は、上記変換部材7の外観を示す斜視図である。図3は、図1(b)に示した固定構造の部分断面斜視図である。変換部材7では、駆動軸6が嵌まり合う凹部としての穴21cが第1の部分21に設けられている。穴21cの内径は、駆動軸6の外径と同等か外径よりも若干小さくされている。図1(b)及び図3に示すように、穴21c内に、駆動軸6の一方側端部6a側が挿入され、駆動軸6が変換部材7に固定されている。穴21c内において、接着剤や溶接等の適宜の接合方法により、駆動軸6が、第1の部分21に接合され、固定されている。なお、穴21cは貫通孔ではなく、止まり穴であってもよい。
FIG. 1B is a perspective view showing a fixing structure of the drive shaft 6 to the conversion member 7 in the actuator 3 according to the first embodiment of the present invention. FIG. 2 is a perspective view showing the appearance of the conversion member 7. FIG. 3 is a partial cross-sectional perspective view of the fixing structure shown in FIG. In the conversion member 7, a hole 21 c serving as a recess in which the drive shaft 6 is fitted is provided in the first portion 21. The inner diameter of the hole 21c is equal to or slightly smaller than the outer diameter of the drive shaft 6. As shown in FIGS. 1B and 3, the one end 6 a side of the drive shaft 6 is inserted into the hole 21 c, and the drive shaft 6 is fixed to the conversion member 7. In the hole 21c, the drive shaft 6 is joined and fixed to the first portion 21 by an appropriate joining method such as an adhesive or welding. The hole 21c may be a blind hole instead of a through hole.
本実施形態では、穴21c内に駆動軸6が挿入され、接合されることにより、駆動軸6は変換部材7の第1の部分21に容易にかつ所望の位置で高精度に固定され得る。従って、小型化を進めた場合であっても、駆動軸6を変換部材7の第1の部分21に高精度に固定することができる。従って、駆動軸6の変位を損なうことなく、小型化を進めることができる。
In the present embodiment, the drive shaft 6 can be easily fixed to the first portion 21 of the conversion member 7 at a desired position with high accuracy by inserting and joining the drive shaft 6 into the hole 21c. Therefore, even when downsizing is advanced, the drive shaft 6 can be fixed to the first portion 21 of the conversion member 7 with high accuracy. Accordingly, it is possible to reduce the size without impairing the displacement of the drive shaft 6.
上記のように、穴21cに駆動軸6の一方側端部6aが嵌まり合うことにより、位置決めが果される。従って、本実施形態のアクチュエータ3を得るに際しては、位置決め治具などを省略することができる。よって製造コストを低減することも可能となる。
As described above, positioning is achieved by fitting one end 6a of the drive shaft 6 into the hole 21c. Therefore, when obtaining the actuator 3 of the present embodiment, a positioning jig or the like can be omitted. Therefore, the manufacturing cost can be reduced.
次に、駆動装置1の動作について説明する。制御部2は、圧電素子10の第1及び第2の電極12,13間に、例えばパルス状の電圧を印加する。これにより、圧電素子10がx方向に沿って伸縮する。
Next, the operation of the drive device 1 will be described. The controller 2 applies, for example, a pulsed voltage between the first and second electrodes 12 and 13 of the piezoelectric element 10. Thereby, the piezoelectric element 10 expands and contracts along the x direction.
ここで、本実施形態では、第4及び第5の部分24,25のそれぞれは、第2の側面10dに固定されている。そして、第2及び第3の部分22,23は、第1及び第2の端面10a,10bに当接している。このため、圧電素子10がx方向に伸張すると、第2の部分22の少なくともz方向z1側の部分がx1側に変位すると共に、第3の部分23の少なくともz方向z1側の部分がx2側に変位する。このため、第2の部分22のz1側の部分と、第3の部分23のz1側の部分との間の間隔が広くなる。その結果、第2及び第3の部分22,23に接続されている第1の部分21の凸部21aの曲率が大きくなる。よって、凸部21aの頂部がz2側に変位する。
Here, in the present embodiment, each of the fourth and fifth portions 24 and 25 is fixed to the second side surface 10d. The second and third portions 22 and 23 are in contact with the first and second end faces 10a and 10b. For this reason, when the piezoelectric element 10 extends in the x direction, at least the z direction z1 side portion of the second portion 22 is displaced to the x1 side, and at least the z direction z1 side portion of the third portion 23 is the x2 side. It is displaced to. For this reason, the space | interval between the part by the side of z1 of the 2nd part 22 and the part by the side of z1 of the 3rd part 23 becomes wide. As a result, the curvature of the convex portion 21a of the first portion 21 connected to the second and third portions 22 and 23 is increased. Therefore, the top part of the convex part 21a is displaced to the z2 side.
一方、圧電素子10がx方向に収縮すると、第2の部分22の少なくともz方向z1側の部分がx2側に変位すると共に、第3の部分23の少なくともz方向z1側の部分がx1側に変位する。このため、第2の部分22のz1側の部分と、第3の部分23のz1側の部分との間の間隔が狭くなる。その結果、第2及び第3の部分22,23に接続されている第1の部分21の凸部21aの曲率が小さくなる。よって、凸部21aの頂部がz1側に変位する。このように、変換部材7は、圧電素子10のx方向に沿った伸縮力をz方向に沿った駆動力に変換する。そして、第1の部分21の凸部21aは、当該駆動力によりz方向に沿って変位する変位部を有する。
On the other hand, when the piezoelectric element 10 contracts in the x direction, at least the z direction z1 side portion of the second portion 22 is displaced to the x2 side, and at least the z direction z1 side portion of the third portion 23 is moved to the x1 side. Displace. For this reason, the space | interval between the part by the side of z1 of the 2nd part 22 and the part by the side of z1 of the 3rd part 23 becomes narrow. As a result, the curvature of the convex portion 21a of the first portion 21 connected to the second and third portions 22 and 23 is reduced. Therefore, the top part of the convex part 21a is displaced to the z1 side. Thus, the conversion member 7 converts the expansion / contraction force along the x direction of the piezoelectric element 10 into a driving force along the z direction. And the convex part 21a of the 1st part 21 has a displacement part displaced along the z direction with the said driving force.
圧電素子10がx方向に伸長するとき、圧電素子10のx方向の寸法L1の中点ではx方向の変位は0となり、z方向には収縮して第1の側面10cと第2の側面10dの間隔は若干小さくなろうとする。しかしながら、第2の側面10dは変換部材7の第4及び第5の部分24,25に部分的に固定されていて変換部材7の拘束を受けるため、第2の側面10dの中心部ではz方向の変位も小さくなる。この結果、第1の部分21のz方向への変位量に比較し、第2の側面10dの中心部あるいは第4及び第5の部分24,25から成る変換部材下面中心部の変位量は小さくなる。このため、変換部材7の特定の場所に錘を付けたり、強固な筺体を設けて固定するなどの対応をすることなく、変換部材7の第1の部分21をz方向に変位させることが可能となる。例えば変換部材7の第4及び第5の部分24,25を中心付近で接合し、その部分を下方に延長して、特別な処置をすることなく筺体に固定することができる。
When the piezoelectric element 10 extends in the x direction, the displacement in the x direction becomes 0 at the midpoint of the dimension L1 of the piezoelectric element 10 and contracts in the z direction to contract in the first direction 10c and the second side face 10d. The interval of is going to be slightly smaller. However, since the second side surface 10d is partially fixed to the fourth and fifth portions 24 and 25 of the conversion member 7 and is restrained by the conversion member 7, the second side surface 10d is in the z direction at the center of the second side surface 10d. The displacement of is also reduced. As a result, the amount of displacement of the center portion of the second side surface 10d or the center portion of the lower surface of the conversion member consisting of the fourth and fifth portions 24 and 25 is smaller than the displacement amount of the first portion 21 in the z direction. Become. For this reason, it is possible to displace the first portion 21 of the conversion member 7 in the z-direction without taking a measure such as attaching a weight to a specific location of the conversion member 7 or providing and fixing a strong housing. It becomes. For example, the fourth and fifth portions 24 and 25 of the conversion member 7 can be joined in the vicinity of the center, and the portions can be extended downward to be fixed to the housing without any special treatment.
以上のように、圧電素子10の伸縮に伴って、凸部21aの頂部がz方向に振動する。これに伴い、駆動軸6もz方向に振動する。すなわち、駆動軸6は、z1側への変位と、z2側への変位とを繰り返し行う。この際に、制御部2から圧電素子10に印加される急峻な電圧波形に応じて変換部材7が急峻に駆動すれば駆動軸6の変位も急速となる。例えば、駆動軸6のz1方向への変位速度(単位時間当たりの変位量)が設定以上に高ければ、駆動軸6と接触して設けられている被駆動部材5と駆動軸6との間の摩擦力よりも被駆動部材5に働く慣性力が優位となり、被駆動部材5は駆動軸6上を滑り相対的にz2方向に移動する。次に、駆動軸6のz2方向への変位速度が設定以下であれば、被駆動部材5と駆動軸6との間の摩擦力が被駆動部材5に働く慣性力よりも優位となり、被駆動部材5と駆動軸6の相対位置は変化しない。これを繰り返すことにより被駆動部材5がz2方向に移動する。
As described above, as the piezoelectric element 10 expands and contracts, the top of the convex portion 21a vibrates in the z direction. Along with this, the drive shaft 6 also vibrates in the z direction. That is, the drive shaft 6 repeatedly performs displacement toward the z1 side and displacement toward the z2 side. At this time, if the conversion member 7 is driven steeply according to a steep voltage waveform applied to the piezoelectric element 10 from the control unit 2, the displacement of the drive shaft 6 also becomes rapid. For example, if the displacement speed (displacement amount per unit time) in the z1 direction of the drive shaft 6 is higher than the set value, the distance between the driven member 5 provided in contact with the drive shaft 6 and the drive shaft 6 The inertial force acting on the driven member 5 is more dominant than the frictional force, and the driven member 5 slides on the drive shaft 6 relatively in the z2 direction. Next, if the displacement speed of the drive shaft 6 in the z2 direction is equal to or less than the setting, the frictional force between the driven member 5 and the drive shaft 6 is superior to the inertial force acting on the driven member 5, and the driven The relative position of the member 5 and the drive shaft 6 does not change. By repeating this, the driven member 5 moves in the z2 direction.
以上説明したように、本実施形態の変換部材7は、錘や固定を必要としない。このため、変換部材7を用いることにより、アクチュエータ3の小型化を図ることができる。特に、例えば図13に示す、振動板103a,103bと軸101とが軸の駆動方向に沿って配置されており、振動板103a,103bの屈曲変形によって軸101が駆動方向に変位する従来のアクチュエータ100と比べて、軸の延びる方向であるz方向における寸法を小型化することができる。
As described above, the conversion member 7 of this embodiment does not require a weight or fixing. For this reason, size reduction of the actuator 3 can be achieved by using the conversion member 7. In particular, for example, a conventional actuator shown in FIG. 13 in which the diaphragms 103a and 103b and the shaft 101 are arranged along the driving direction of the shaft, and the shaft 101 is displaced in the driving direction by bending deformation of the vibrating plates 103a and 103b. Compared with 100, the dimension in the z direction, which is the direction in which the axis extends, can be reduced.
また、上述したように、駆動軸6が第1の部分21に篏合により位置決めされかつ固定されている。従って、小型化を進めた場合であっても、駆動軸6の変位が損なわれ難い。従って、それによっても、小型化を進めることができる。
As described above, the drive shaft 6 is positioned and fixed to the first portion 21 by fitting. Therefore, even when the size reduction is advanced, the displacement of the drive shaft 6 is not easily lost. Therefore, downsizing can also be promoted.
ところで、特許文献1に記載のような錘を有するアクチュエータの小型化を図るためには、錘を小型化する必要がある。一方、アクチュエータの変位量を大きくするためには、錘を重くする必要がある。よって、アクチュエータの変位量を大きく保ちつつ、アクチュエータを小型化するためには、高い比重を有する高価な錘を用いる必要がある。このため、アクチュエータのコストが上昇してしまう。またアクチュエータの重量が増加する。また軸、圧電素子、錘の複合体が振動するときに振動の節となる場所は、圧電素子の錘側または錘の圧電素子側付近となり、その節部で筺体に固定するには、ゴム状弾性体などで振動を阻害しないように取り付ける必要があるため、組立作業が困難となりがちである。
Incidentally, in order to reduce the size of an actuator having a weight as described in Patent Document 1, it is necessary to reduce the weight. On the other hand, in order to increase the displacement amount of the actuator, it is necessary to make the weight heavier. Therefore, in order to reduce the size of the actuator while keeping the displacement of the actuator large, it is necessary to use an expensive weight having a high specific gravity. For this reason, the cost of an actuator will rise. In addition, the weight of the actuator increases. Also, when the shaft / piezoelectric element / weight complex vibrates, the location of the vibration node is on the weight side of the piezoelectric element or near the piezoelectric element side of the weight. Since it is necessary to attach the elastic body to prevent vibrations, the assembly work tends to be difficult.
それに対して、本実施形態のアクチュエータ3は、高い比重を有する高価な錘を必要としない。従って、アクチュエータ3は、部品点数を削減できるため、製造コストが低くできる。また錘をなくすことで、アクチュエータの重量を軽くできる。さらにまた変換部材7の下辺中心部の金属などを延長して筺体に固定するなど、組み立てが容易である。
On the other hand, the actuator 3 of this embodiment does not require an expensive weight having a high specific gravity. Therefore, since the actuator 3 can reduce the number of parts, manufacturing cost can be reduced. Also, the weight of the actuator can be reduced by eliminating the weight. Furthermore, assembly is easy, such as extending the metal at the center of the lower side of the conversion member 7 and fixing it to the housing.
加えて、前述したように、駆動軸6が第1の部分21に篏合により位置決めされるため、それによっても製造工程の簡略化及び製造コストの低減を図ることができる。
In addition, as described above, since the drive shaft 6 is positioned on the first portion 21 by fitting, the manufacturing process can be simplified and the manufacturing cost can be reduced.
ここで、本実施形態のアクチュエータ3は、従来のアクチュエータ100よりも制御が容易である。すなわち、従来のアクチュエータ100では、振動板103a,103bが外側に向かって凸状になったときに軸固定部材102が下側に凸状に変形しやすく、振動板103a,103bが内側に向かって凸状になったときに軸固定部材102が上側に凸状に変形しやすい。このため、振動板103a,103bが外側及び内側に凸状に変形することによって軸固定部材102の全体位置はどちらの場合も下側に移動するが、振動板103a,103bの変形が外か内どちらに凸状になるかによって、軸固定部材102のたわみ変形方向は上下反対となる。このため、上下方向によって軸の変位挙動が異なることになり、軸の変位量を制御することが難しくなる。従って、軸101の振動の制御、具体的には、係合部材106を安定して移動させることが困難である。また、振動板103a,103bの屈曲変形を利用する場合は、駆動力の発生力が小さくなり、共振周波数が低くなる。この結果、被駆動体が比較的重い場合の適応は困難であり、また駆動パルス周波数は一般に共振周波数以下でないと制御困難となるため、軸変位量と駆動パルス周波数の積で決定される被駆動体の移動速度も制約される。
Here, the actuator 3 of the present embodiment is easier to control than the conventional actuator 100. That is, in the conventional actuator 100, when the diaphragms 103a and 103b are convex outward, the shaft fixing member 102 is easily deformed downward and the diaphragms 103a and 103b are directed inward. When it becomes convex, the shaft fixing member 102 is easily deformed upward. For this reason, when the diaphragms 103a and 103b are deformed outwardly and inwardly, the overall position of the shaft fixing member 102 moves downward in both cases, but the deformation of the diaphragms 103a and 103b is outside or inside. Depending on which one is convex, the direction of deflection deformation of the shaft fixing member 102 is upside down. For this reason, the displacement behavior of the shaft differs depending on the vertical direction, and it becomes difficult to control the amount of displacement of the shaft. Therefore, it is difficult to control the vibration of the shaft 101, specifically, to move the engaging member 106 stably. Further, when the bending deformation of the diaphragms 103a and 103b is used, the generation force of the driving force is reduced and the resonance frequency is lowered. As a result, it is difficult to adapt when the driven body is relatively heavy, and it is difficult to control unless the drive pulse frequency is generally lower than the resonance frequency. Therefore, the driven body is determined by the product of the axial displacement and the drive pulse frequency. Body movement speed is also limited.
(第2の実施形態)
図6(a)及び(b)は、本発明の第2の実施形態に係るアクチュエータにおける駆動軸6の変換部材7aに対する固定構造を示す斜視図及び部分断面斜視図であり、図7は、変換部材7aの外観を示す斜視図である。 (Second Embodiment)
6A and 6B are a perspective view and a partial cross-sectional perspective view showing a fixing structure of thedrive shaft 6 with respect to the conversion member 7a in the actuator according to the second embodiment of the present invention. FIG. It is a perspective view which shows the external appearance of the member 7a.
図6(a)及び(b)は、本発明の第2の実施形態に係るアクチュエータにおける駆動軸6の変換部材7aに対する固定構造を示す斜視図及び部分断面斜視図であり、図7は、変換部材7aの外観を示す斜視図である。 (Second Embodiment)
6A and 6B are a perspective view and a partial cross-sectional perspective view showing a fixing structure of the
本実施形態では、変換部材7aにおいて第1の部分21に貫通孔としての穴21cが設けられている。この点については第1の実施形態の変換部材7と同様である。もっとも、本実施形態の変換部材7aでは、第1の部分21の外側面、図面上の上面において、上方に突出している環状支持部21dが設けられている。すなわち穴21cの内径と等しい内径を有する環状支持部21dが設けられている。その他の点については、本実施形態は第1の実施形態と同様であるため、第1の実施形態の説明を援用することとする。
In the present embodiment, a hole 21c as a through hole is provided in the first portion 21 of the conversion member 7a. This is the same as the conversion member 7 of the first embodiment. However, in the conversion member 7a of the present embodiment, an annular support portion 21d protruding upward is provided on the outer surface of the first portion 21 and the upper surface in the drawing. That is, an annular support portion 21d having an inner diameter equal to the inner diameter of the hole 21c is provided. Since the present embodiment is the same as the first embodiment with respect to other points, the description of the first embodiment is incorporated.
本実施形態では、変換部材7aに環状支持部21dが設けられているため、第1の部分21における、駆動軸6と固定される部分の機械的強度を高めることができる。従って、駆動軸6から受ける力による第1の部分21のたわみなどの変形が生じ難い。それによって変位効率の低下を効果的に抑制することができる。
In the present embodiment, since the conversion member 7a is provided with the annular support portion 21d, the mechanical strength of the portion of the first portion 21 fixed to the drive shaft 6 can be increased. Therefore, deformation such as deflection of the first portion 21 due to the force received from the drive shaft 6 is unlikely to occur. Thereby, a decrease in displacement efficiency can be effectively suppressed.
また、本実施形態では、環状支持部21dが設けられているため、環状支持部21dの内周面においても駆動軸6を支持することができる。従って、駆動軸6の延びる方向が第1の部分21の面方向に対して垂直な方向から傾くことを確実に抑制することができる。
In the present embodiment, since the annular support portion 21d is provided, the drive shaft 6 can be supported also on the inner peripheral surface of the annular support portion 21d. Therefore, it is possible to reliably suppress the extending direction of the drive shaft 6 from being inclined from the direction perpendicular to the surface direction of the first portion 21.
加えて、駆動軸6の第1の部分21に接触固定される面積が大きくなるため、駆動軸6と第1の部分21との接合強度も高めることができる。
In addition, since the area fixed to the first portion 21 of the drive shaft 6 is increased, the bonding strength between the drive shaft 6 and the first portion 21 can be increased.
なお、本実施形態では、環状支持部21dは円環状であったが、環状支持部21dに代えて他の形状の支持部を設けてもよい。すなわち、穴21cが円形であったとしても、環状支持部21dの平面形状における外形は円に限らず、矩形等の他の形状であってもよい。さらに、支持部の一部が切り欠かれており、環状でない複数の支持部部分が周方向に連ねられている形状であってもよい。
In the present embodiment, the annular support portion 21d has an annular shape, but a support portion having another shape may be provided instead of the annular support portion 21d. That is, even if the hole 21c is circular, the outer shape in the planar shape of the annular support portion 21d is not limited to a circle but may be other shapes such as a rectangle. Furthermore, a shape in which a part of the support part is cut out and a plurality of support part parts that are not annular are connected in the circumferential direction may be used.
(第3の実施形態)
図8(a)及び(b)は、本発明の第3の実施形態に係るアクチュエータにおける駆動軸6の変換部材7bに対する固定構造を示す斜視図及び部分断面斜視図であり、図9は、変換部材7bの外観を示す斜視図である。 (Third embodiment)
FIGS. 8A and 8B are a perspective view and a partial cross-sectional perspective view showing a fixing structure of thedrive shaft 6 to the conversion member 7b in the actuator according to the third embodiment of the present invention, and FIG. It is a perspective view which shows the external appearance of the member 7b.
図8(a)及び(b)は、本発明の第3の実施形態に係るアクチュエータにおける駆動軸6の変換部材7bに対する固定構造を示す斜視図及び部分断面斜視図であり、図9は、変換部材7bの外観を示す斜視図である。 (Third embodiment)
FIGS. 8A and 8B are a perspective view and a partial cross-sectional perspective view showing a fixing structure of the
本実施形態では、変換部材7bの第1の部分21の上面に突起21eが設けられている。突起21eは、第1の部分21上に設けられた円柱状部分21e2と、円柱状部分21e2の上方に連ねられた半球部分21e1とを有する。円柱状部分21e2の外径は、駆動軸6の一方側端部6aの内径と同等とされている。
In the present embodiment, the protrusion 21e is provided on the upper surface of the first portion 21 of the conversion member 7b. The protrusion 21e has a columnar portion 21e2 provided on the first portion 21 and a hemispherical portion 21e1 connected to the upper side of the columnar portion 21e2. The outer diameter of the columnar portion 21e2 is equal to the inner diameter of the one end portion 6a of the drive shaft 6.
本実施形態では、駆動軸6の一方側端部6aの開口が本発明における凹部を構成している。この凹部に、上記第1の部分21に設けられた突起21eが嵌まり合うことにより第1の部分21に対し駆動軸6が位置決めされる。そして、第1の実施形態と同様に、接着剤などの適宜の接合方法を用いることにより、第1の部分21と駆動軸6とが接合され、駆動軸6が変換部材7bの第1の部分21に固定される。本実施形態においても、上記突起21eと駆動軸6との嵌まり合いにより位置決めを行うことができる。従って、小型化を進めた場合であっても、容易にかつ高精度に駆動軸6を変換部材7bの第1の部分21に固定することができる。
In the present embodiment, the opening at one end 6a of the drive shaft 6 constitutes a recess in the present invention. The drive shaft 6 is positioned with respect to the first portion 21 by fitting the protrusion 21 e provided on the first portion 21 into the recess. Then, similarly to the first embodiment, by using an appropriate bonding method such as an adhesive, the first portion 21 and the drive shaft 6 are bonded, and the drive shaft 6 is the first portion of the conversion member 7b. 21 is fixed. Also in the present embodiment, positioning can be performed by fitting the protrusion 21e and the drive shaft 6 together. Therefore, even when downsizing is advanced, the drive shaft 6 can be fixed to the first portion 21 of the conversion member 7b easily and with high accuracy.
加えて、突起21eが大きな面積で駆動軸6の内周面に接触している。従って、駆動軸6と第1の部分21との接合強度も高めることができる。さらに、第2の実施形態と同様に、駆動軸6の延びる方向が第1の部分21の面方向に対して垂直な方向から傾くことを確実に抑制することができる。
In addition, the protrusion 21e is in contact with the inner peripheral surface of the drive shaft 6 with a large area. Therefore, the bonding strength between the drive shaft 6 and the first portion 21 can also be increased. Further, similarly to the second embodiment, it is possible to reliably suppress the extending direction of the drive shaft 6 from being inclined from the direction perpendicular to the surface direction of the first portion 21.
なお、上記突起21eの形状についても特に限定されず、円柱状部分21e2の一部が切り欠かれていてもよい。さらに、駆動軸6の一方側端部6aの開口が円形であったため、円柱状部分21e2を設けたが、円柱状に限定されない。駆動軸6の凹部に相当する部分の開口形状が他の形状であれば、該他の形状に嵌まり合う外形を有するように突起21eが設けられればよい。
Note that the shape of the protrusion 21e is not particularly limited, and a part of the columnar portion 21e2 may be cut out. Furthermore, since the opening of the one end portion 6a of the drive shaft 6 is circular, the columnar portion 21e2 is provided, but the shape is not limited to the columnar shape. If the opening shape of the portion corresponding to the concave portion of the drive shaft 6 is another shape, the protrusion 21e may be provided so as to have an outer shape that fits into the other shape.
(第4の実施形態)
図10(a)は、本発明の第4の実施形態に係るアクチュエータで用いられている変換部材7cの斜視図であり、(b)は、本発明の第4の実施形態に係るアクチュエータにおける駆動軸の変換部材に対する固定構造を示す斜視図である。 (Fourth embodiment)
FIG. 10A is a perspective view of aconversion member 7c used in the actuator according to the fourth embodiment of the present invention, and FIG. 10B is a drive in the actuator according to the fourth embodiment of the present invention. It is a perspective view which shows the fixation structure with respect to the conversion member of an axis | shaft.
図10(a)は、本発明の第4の実施形態に係るアクチュエータで用いられている変換部材7cの斜視図であり、(b)は、本発明の第4の実施形態に係るアクチュエータにおける駆動軸の変換部材に対する固定構造を示す斜視図である。 (Fourth embodiment)
FIG. 10A is a perspective view of a
図10(a)に示すように、本実施形態では、変換部材7cの第1の部分21の上面に、複数の支持突起21f,21gが設けられている。支持突起21f,21gの内周面は、駆動軸6の外周面に沿う形状とされている。従って、本実施形態では、支持突起21f,21gの内側面は円筒曲面の一部とされている。
As shown in FIG. 10A, in the present embodiment, a plurality of support protrusions 21f and 21g are provided on the upper surface of the first portion 21 of the conversion member 7c. The inner peripheral surfaces of the support protrusions 21f and 21g are shaped along the outer peripheral surface of the drive shaft 6. Therefore, in this embodiment, the inner side surfaces of the support protrusions 21f and 21g are part of a cylindrical curved surface.
この円筒曲面の径は、駆動軸6の外径と略同等とされている。本実施形態では、第1の部分21上に設けられた支持突起21f,21gが本発明における凹部を構成している。支持突起21f,21g間に駆動軸6が嵌まり合うことにより第1の部分21に対し駆動軸6が位置決めされる。そして、第1の実施形態と同様に、接着剤などの適宜の接合方法を用いることにより、第1の部分21と駆動軸6とが接合され、駆動軸6が変換部材7cの第1の部分21に固定される。
The diameter of this cylindrical curved surface is substantially the same as the outer diameter of the drive shaft 6. In the present embodiment, the support protrusions 21f and 21g provided on the first portion 21 constitute a recess in the present invention. The drive shaft 6 is positioned with respect to the first portion 21 by fitting the drive shaft 6 between the support protrusions 21f and 21g. Then, similarly to the first embodiment, by using an appropriate joining method such as an adhesive, the first portion 21 and the drive shaft 6 are joined, and the drive shaft 6 is the first portion of the conversion member 7c. 21 is fixed.
よって、本実施形態においても、上記支持突起21f,21gと駆動軸6との嵌まり合いにより位置決めを行うことができる。従って、小型化を進めた場合であっても、容易にかつ高精度に駆動軸6を変換部材7cの第1の部分21に固定することができる。
Therefore, also in the present embodiment, positioning can be performed by fitting the support protrusions 21f and 21g with the drive shaft 6. Therefore, even when downsizing is advanced, the drive shaft 6 can be fixed to the first portion 21 of the conversion member 7c easily and with high accuracy.
加えて、支持突起21f,21gが大きな面積で駆動軸6の外周面に接触している。従って、駆動軸6と第1の部分21との接合強度も高めることができる。さらに、第2,第3の実施形態と同様に、駆動軸6の延びる方向が第1の部分21の面方向に対して垂直な方向から傾くことを確実に抑制することができる。
In addition, the support protrusions 21f and 21g are in contact with the outer peripheral surface of the drive shaft 6 with a large area. Therefore, the bonding strength between the drive shaft 6 and the first portion 21 can also be increased. Further, similarly to the second and third embodiments, it is possible to reliably suppress the extending direction of the drive shaft 6 from being inclined from the direction perpendicular to the surface direction of the first portion 21.
(他の変形例)
図11は、本発明の変形例に係るアクチュエータの模式的斜視図である。本変形例では、駆動軸6が角筒状の形状を有している。このように、本発明において駆動軸の形状は円筒状に限らず、角筒状であってもよい。この場合、駆動軸6が角筒状であるため、変換部材7の第1の部分21には、角筒状の駆動軸6の外周側面に沿う形状の略矩形の穴が設けられている。この矩形の穴に駆動軸6が嵌まり合うようにして駆動軸6が変換部材7の第1の部分21に固定されている。 (Other variations)
FIG. 11 is a schematic perspective view of an actuator according to a modification of the present invention. In this modification, thedrive shaft 6 has a rectangular tube shape. Thus, in the present invention, the shape of the drive shaft is not limited to a cylindrical shape, and may be a rectangular tube shape. In this case, since the drive shaft 6 has a rectangular tube shape, the first portion 21 of the conversion member 7 is provided with a substantially rectangular hole having a shape along the outer peripheral side surface of the rectangular tube-shaped drive shaft 6. The drive shaft 6 is fixed to the first portion 21 of the conversion member 7 so that the drive shaft 6 fits in the rectangular hole.
図11は、本発明の変形例に係るアクチュエータの模式的斜視図である。本変形例では、駆動軸6が角筒状の形状を有している。このように、本発明において駆動軸の形状は円筒状に限らず、角筒状であってもよい。この場合、駆動軸6が角筒状であるため、変換部材7の第1の部分21には、角筒状の駆動軸6の外周側面に沿う形状の略矩形の穴が設けられている。この矩形の穴に駆動軸6が嵌まり合うようにして駆動軸6が変換部材7の第1の部分21に固定されている。 (Other variations)
FIG. 11 is a schematic perspective view of an actuator according to a modification of the present invention. In this modification, the
上記のように、本発明において、第1の部分に設けられる凹部と、該凹部に嵌まり合う駆動軸との関係については、駆動軸6が凹部に嵌まり合うように駆動軸6の嵌まり合う部分の外径及び凹部の平面形状を選択すればよい。
As described above, in the present invention, regarding the relationship between the recess provided in the first portion and the drive shaft that fits in the recess, the drive shaft 6 fits so that the drive shaft 6 fits in the recess. What is necessary is just to select the outer diameter of the part to fit, and the planar shape of a recessed part.
さらに、駆動軸6は、筒状体に限らず、柱状体であってもよい。その場合であっても、前述した第1の実施形態,第2の実施形態及び第4の実施形態では、第1の部分21側に凹部が設けられているため、凹部に駆動軸6を容易に位置決めし、第1の部分21に固定することができる。また、第3の実施形態のように、第1の部分21側に、嵌まり合いに際して挿入される突起21eを設けた構造では、駆動軸6側に凹部を設ける必要がある。第2の実施形態では、筒状体であったため、開口部が凹部を構成していた。これに対して、柱状体であってもよく、柱状体の第1の部分21に固定される側の端部に、上記突起21eが嵌まり合う穴を設けてもよい。例えば円柱の一端側端面にこのような穴を設け、駆動軸6を構成してもよい。
Furthermore, the drive shaft 6 is not limited to a cylindrical body, but may be a columnar body. Even in this case, in the first embodiment, the second embodiment, and the fourth embodiment described above, since the concave portion is provided on the first portion 21 side, the drive shaft 6 can be easily provided in the concave portion. And can be fixed to the first portion 21. Further, as in the third embodiment, in the structure in which the protrusion 21e inserted at the time of fitting is provided on the first portion 21 side, it is necessary to provide a recess on the drive shaft 6 side. In the second embodiment, since it is a cylindrical body, the opening constitutes a recess. On the other hand, it may be a columnar body, and a hole in which the projection 21e is fitted may be provided at an end portion of the columnar body that is fixed to the first portion 21. For example, the drive shaft 6 may be configured by providing such a hole on the end surface of one end of the cylinder.
図12は、本発明の変形例に係るアクチュエータにおける上記変換部材を用意する工程を説明するための斜視図である。ここでは、リードフレーム101上に連ねられて、変換部材7が形成されている。そして、この変換部材7に駆動軸6が固定された構造が示されている。
FIG. 12 is a perspective view for explaining a process of preparing the conversion member in the actuator according to the modification of the present invention. Here, the conversion member 7 is formed on the lead frame 101. And the structure where the drive shaft 6 was fixed to this conversion member 7 is shown.
変換部材7は、このように、リードフレーム101に連ねられた金属板をプレス加工等により折り曲げ加工することにより容易に形成することができる。しかる後、図示のように、形成された変換部材7に上述した実施形態に従って駆動軸6を接合し、固定すればよい。
Thus, the conversion member 7 can be easily formed by bending a metal plate connected to the lead frame 101 by press working or the like. Thereafter, as shown in the figure, the drive shaft 6 may be joined and fixed to the formed conversion member 7 according to the above-described embodiment.
変換部材7を、金属板のプレス加工からなるプレス加工部材により形成する場合、加工工程の簡略化を図ることができる。また、変換部材7と駆動軸6を一体で加工を行うこともできる。従って、製造コストの低減を果すことができる。
When the conversion member 7 is formed by a press working member formed by pressing a metal plate, the working process can be simplified. Also, the conversion member 7 and the drive shaft 6 can be processed integrally. Therefore, the manufacturing cost can be reduced.
1…駆動装置
2…制御部
3…アクチュエータ
4…駆動部材
5…被駆動部材
5a…貫通孔
6…駆動軸
6a…一方側端部
7,7a,7b,7c…変換部材
10…圧電素子(駆動素子)
10a…第1の端面
10b…第2の端面
10c…第1の側面
10d…第2の側面
10e…第3の側面
10f…第4の側面
11…圧電層
12…第1の電極
13…第2の電極
21…第1の部分
21a…凸部
21c…穴
21d…環状支持部
21e…突起
21e1…半球部分
21e2…円柱状部分
21f,21g…支持突起
22…第2の部分
23…第3の部分
24…第4の部分
25…第5の部分
26…第6の部分
27…第7の部分
31~33…樹脂接着剤層 DESCRIPTION OFSYMBOLS 1 ... Drive device 2 ... Control part 3 ... Actuator 4 ... Drive member 5 ... Driven member 5a ... Through-hole 6 ... Drive shaft 6a ... One side edge part 7, 7a, 7b, 7c ... Conversion member 10 ... Piezoelectric element (drive) element)
10a ...1st end surface 10b ... 2nd end surface 10c ... 1st side surface 10d ... 2nd side surface 10e ... 3rd side surface 10f ... 4th side surface 11 ... Piezoelectric layer 12 ... 1st electrode 13 ... 2nd Electrode 21 ... first part 21a ... convex part 21c ... hole 21d ... annular support part 21e ... projection 21e1 ... hemispherical part 21e2 ... cylindrical parts 21f and 21g ... 24 ... Fourth portion 25 ... Fifth portion 26 ... Sixth portion 27 ... Seventh portions 31-33 ... Resin adhesive layer
2…制御部
3…アクチュエータ
4…駆動部材
5…被駆動部材
5a…貫通孔
6…駆動軸
6a…一方側端部
7,7a,7b,7c…変換部材
10…圧電素子(駆動素子)
10a…第1の端面
10b…第2の端面
10c…第1の側面
10d…第2の側面
10e…第3の側面
10f…第4の側面
11…圧電層
12…第1の電極
13…第2の電極
21…第1の部分
21a…凸部
21c…穴
21d…環状支持部
21e…突起
21e1…半球部分
21e2…円柱状部分
21f,21g…支持突起
22…第2の部分
23…第3の部分
24…第4の部分
25…第5の部分
26…第6の部分
27…第7の部分
31~33…樹脂接着剤層 DESCRIPTION OF
10a ...
Claims (6)
- 第1の方向に互いに対向する第1及び第2の端面と、前記第1の方向に対して垂直な第2の方向に対向する第1及び第2の側面とを有し、前記第1の方向に沿って伸縮する駆動素子と、
前記駆動素子の前記第1の方向に沿った伸縮力を前記第2の方向に沿った駆動力に変換し、当該駆動力により第2の方向に沿って変位する変位部と、前記第1の側面の上に位置し、前記第1の側面から離間した前記変位部を含む凸部を有する第1の部分と、前記第1の部分に接続されており、前記第1の端面に当接している第2の部分と、前記第1の部分に接続されており、前記第2の端面に当接している第3の部分と、前記第2の部分に接続されており、前記第2の側面に固定された第4の部分と、前記第3の部分に接続されており、前記第2の側面に固定された第5の部分と、を有し、弾性を有する変換部材と、
前記変換部材の前記第1の部分に一端が固定されておりかつ前記第2の方向に延びている駆動軸と、
を備え、
前記駆動軸及び前記変換部材の前記第1の部分のうちの一方が他方に設けられた凹部に嵌まり合うようにして前記駆動軸が前記第1の部分に固定されている、アクチュエータ。 First and second end faces opposed to each other in a first direction, and first and second side faces opposed to a second direction perpendicular to the first direction, A drive element extending and contracting along the direction;
A displacement portion that converts the expansion / contraction force along the first direction of the drive element into a drive force along the second direction, and is displaced along the second direction by the drive force; and the first A first portion having a convex portion including the displacement portion located on the side surface and spaced apart from the first side surface; connected to the first portion; and in contact with the first end surface A second part that is connected to the first part and is in contact with the second end surface; and a second part that is connected to the second part; A fourth part fixed to the third part, and a fifth part connected to the third part and fixed to the second side surface, and having elasticity,
A drive shaft having one end fixed to the first portion of the conversion member and extending in the second direction;
With
An actuator, wherein the drive shaft is fixed to the first portion so that one of the drive shaft and the first portion of the conversion member fits into a recess provided on the other. - 前記凹部が前記変換部材の前記第1の部分の前記駆動軸が固定される面に設けられた穴であり、前記穴に前記駆動軸の一端側が挿入されて前記駆動軸が前記穴に嵌まり合っている、請求項1に記載のアクチュエータ。 The recess is a hole provided on a surface of the first portion of the conversion member to which the drive shaft is fixed, and one end side of the drive shaft is inserted into the hole so that the drive shaft fits into the hole. The actuator of claim 1, which is matched.
- 前記凹部が前記駆動軸の一端に開口している穴であり、前記変換部材の前記第1の部分の前記駆動軸が固定される面に突起が設けられており、前記穴に該突起が嵌まり合うようにして前記駆動軸が前記第1の部分に固定されている、請求項1に記載のアクチュエータ。 The recess is a hole opened at one end of the drive shaft, and a protrusion is provided on a surface of the first portion of the conversion member to which the drive shaft is fixed, and the protrusion is fitted into the hole. The actuator according to claim 1, wherein the drive shaft is fixed to the first portion so as to fit together.
- 前記突起が前記駆動軸と一体に設けられている、請求項3に記載のアクチュエータ。 The actuator according to claim 3, wherein the protrusion is provided integrally with the drive shaft.
- 前記変換部材が金属板をプレス加工してなるプレス加工部材からなる、請求項1~4のいずれか一項に記載のアクチュエータ。 The actuator according to any one of claims 1 to 4, wherein the conversion member is a pressed member formed by pressing a metal plate.
- 前記変換部材と前記駆動軸とが1つの金属板をプレス加工してなるプレス加工部材からなる、請求項1~5のいずれか一項に記載のアクチュエータ。 The actuator according to any one of claims 1 to 5, wherein the conversion member and the drive shaft are formed of a pressed member formed by pressing a single metal plate.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014526967A JP5892251B2 (en) | 2012-07-27 | 2013-07-24 | Actuator |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-166818 | 2012-07-27 | ||
| JP2012166818 | 2012-07-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014017527A1 true WO2014017527A1 (en) | 2014-01-30 |
Family
ID=49997336
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/070017 WO2014017527A1 (en) | 2012-07-27 | 2013-07-24 | Actuator |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5892251B2 (en) |
| WO (1) | WO2014017527A1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05122951A (en) * | 1991-10-24 | 1993-05-18 | Ricoh Co Ltd | Driving mechanism |
| JPH05191988A (en) * | 1992-01-10 | 1993-07-30 | Olympus Optical Co Ltd | Ultrasonic oscillator |
| JP2002281768A (en) * | 2001-03-21 | 2002-09-27 | Ricoh Co Ltd | Rotational actuator |
| JP2009038901A (en) * | 2007-08-01 | 2009-02-19 | Toshiba Corp | Piezoelectric motor, and camera device |
-
2013
- 2013-07-24 WO PCT/JP2013/070017 patent/WO2014017527A1/en active Application Filing
- 2013-07-24 JP JP2014526967A patent/JP5892251B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05122951A (en) * | 1991-10-24 | 1993-05-18 | Ricoh Co Ltd | Driving mechanism |
| JPH05191988A (en) * | 1992-01-10 | 1993-07-30 | Olympus Optical Co Ltd | Ultrasonic oscillator |
| JP2002281768A (en) * | 2001-03-21 | 2002-09-27 | Ricoh Co Ltd | Rotational actuator |
| JP2009038901A (en) * | 2007-08-01 | 2009-02-19 | Toshiba Corp | Piezoelectric motor, and camera device |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2014017527A1 (en) | 2016-07-11 |
| JP5892251B2 (en) | 2016-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11063205B2 (en) | Vibration actuator and method for manufacturing the same | |
| JP6324208B2 (en) | Ultrasonic motor | |
| JP2014018027A (en) | Vibration type actuator, imaging apparatus, and stage | |
| JP5742856B2 (en) | Displacement member, drive member, actuator and drive device | |
| KR20090062217A (en) | Linear motor and actuator having the same | |
| JP6049277B2 (en) | Vibration type driving device | |
| JP5892251B2 (en) | Actuator | |
| JP5316756B2 (en) | Drive device | |
| JP5565540B1 (en) | Actuator unit and imaging device | |
| WO2014174750A1 (en) | Drive apparatus and image pickup apparatus using same | |
| JP6708472B2 (en) | Vibration wave motor and optical device equipped with the vibration wave motor | |
| WO2016002917A1 (en) | Vibration-type actuator, lens barrel, image-capturing device, and automatic stage | |
| JP6253261B2 (en) | Vibration actuator and optical equipment | |
| US20080258578A1 (en) | Driving device capable of obtaining a stable frequency characteristic | |
| JP5151199B2 (en) | Drive device using electromechanical transducer | |
| JP2018148788A (en) | motor | |
| JP6525640B2 (en) | Vibration type actuator, ultrasonic motor and lens barrel | |
| JP6624859B2 (en) | Vibration wave motor | |
| WO2010032624A1 (en) | Piezoelectric actuator | |
| WO2014021212A1 (en) | Manufacturing method for actuator device, and actuator device | |
| JP2019103337A (en) | Vibration type actuator and optical instrument | |
| JP2014204461A (en) | Vibration type actuator and lens barrel | |
| JP2015043671A (en) | Ultrasonic motor | |
| JP2008236966A (en) | Driving device using electromechanical conversion element |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13823384 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2014526967 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 13823384 Country of ref document: EP Kind code of ref document: A1 |